18_12afig_pchem.jpg rotational motion center of mass translational motion r1r1 r2r2 motion of two...
TRANSCRIPT

18_12afig_PChem.jpg
Rotational Motion
Center of Mass
Translational Motion
r1
r2
2
ˆ ˆ ˆ2
Hm
2
ˆ ˆ ˆ2
HI
L L
22ˆ ˆ ˆ ( )
2 2 eq
kH
r r
Motion of Two Bodies
Each type of motion is best represented in its own coordinate system best suited to solving the equations involved
k
2 22 2
1 2 1 21 2
ˆ ˆ ˆ ˆ ( , )2 2
H Vm m
r r
RcInternal coordinates
Cartesian
Internal motion (w.r.t CM)
Motion of the C.M.
2r
1r
Origin
rVibrational Motion
Centre of Mass
1 1 2 21 1 1 1 2 2 2 2
1 2
, , , , , ,m m
X Y Z x y z x y zm m
r r
R r r
Weighted average of all positions
1 1 2 2
1 2
m x m xX
m m
1 1 2 2
1 2
m y m yY
m m
1 1 2 2
1 2
m z m zZ
m m
2 22 2ˆ ˆ ˆ ˆ ˆ ˆ( ) ( ) ( )
2 2H H H V
M R rR r r
Motion of Two Bodies
Internal Coordinates:
1 1 2 2& r r R r r R1 2 r r r
1 2 1 2 r r R r R r r
In C.M. Coordinates:
( , , )x y zr

Kinetic Energy Terms
2 22 2ˆ ˆ ˆ ˆ ˆ( ) ( )
2 2K K K
M R rR r
? ?
2 2 2 2 22
2 2 2ˆ ˆ( )
2 2
d d dK
M M dX dY dZ
RR
2 2 2 2 22
2 2 2ˆ ˆ( )
2 2
d d dK
dx dy dz
rr
? ? ?
? ? ?

Centre of Mass Coordinates
1 1 1
d dX d dx d
dx dx dX dx dx
1 1 2 2 1 1
1 1 1 2 1 2
m x m x m mdX d
dx dx m m m m M
1 21 1
1dx d
x xdx dx
1
1
md d d
dx M dX dx

Centre of Mass Coordinates
2 2 2
d dX d dx d
dx dx dX dx dx
1 1 2 2 2 2
2 2 1 2 1 2
m x m x m mdX d
dx dx m m m m M
1 22 2
1dx d
x xdx dx
2
2
md d d
dx M dX dx

Centre of Mass Coordinates2
1 12
1
m md d d d d
dx M dX dx M dX dx
2 2 21 1 12 2 2
m m md d d d d d
M dX M dX dx dx M dX dx
22 2 22 2
2 2 2 22
2m md d d d
dx M dX M dXdx dx
Similarly
2 2 21 12 2 2
2m md d d
M dX M dXdx dx

Centre of Mass Coordinates
2 2 21
2 2 2 21 1 1
1 2 1md d d d
m dx M dX M dXdx m dx
2 22 2 2 21 2
2 21 2 1 1 2 2
1 1ˆ2 2
x xx
d dK
m m m dx m dx
2 2 22
2 2 2 22 2 2
1 2 1md d d d
m dx M dX M dXdx m dx
2 2 2 2 2 21 2
2 2 2 2 2 2 2 21 1 2 2 2 1
1 1 1 1m md d d d d d
m dx m dx M dX M dX m dx m dx

Centre of Mass Coordinates
2 2 2 21 2
2 2 2 2 2 21 1 2 2 1 2
1 1 1 1m md d d d
m dx m dx M M dX m m dx
2 2
2 2
1 1d d
M dX dx 1 2
1 2 1 2
1 1 1 m m
m m m m
Reduced mass
2 2 2
2 2
1 1ˆ2x
d dK
M dX dx
22 2
internal
1 1ˆ ˆ ˆ2 CMK K K
M
R r
2 2 22
2 2 2
d d d
dX dY dZ R
2 2 22
2 2 2
d d d
dx dy dz r

Hamiltonian2 2
2 2ˆ ˆ ˆ ˆ ˆ ˆ( ) ( ) ( )2 2
H H H VM
R rR r r
ˆ ˆ ˆ( , ) ( ) ( ) ( ) ( ) ( ) ( )H H H E E R rR r R r R r R r
ˆ ( ) ( ) ( )H E RR R R
22ˆ ˆ( ) ( ) ( )
2V E
r rr r r
22ˆ ( ) ( )
2E
M R RR R
ˆ ( ) ( ) ( )H E rr r r
C.M. Motion3-D P.I.B
Internal MotionRotationVibration
Separable!
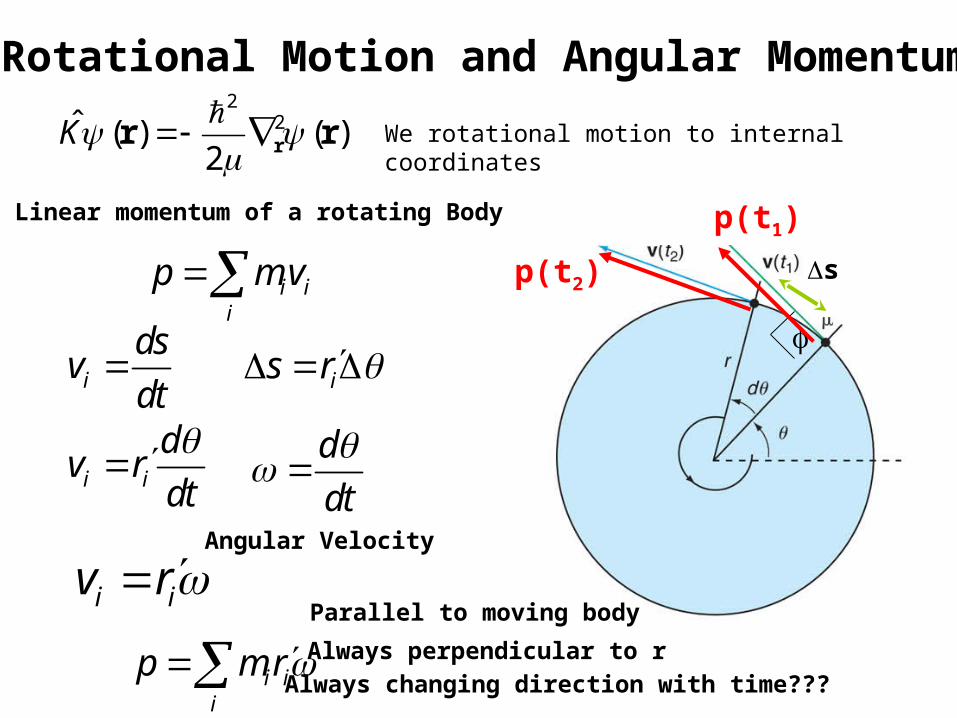
Rotational Motion and Angular Momentum2
2ˆ ( ) ( )2
K
rr r
We rotational motion to internal coordinates
i ii
p m vLinear momentum of a rotating Body
i ii
p m r
i i
dv r
dt
s
is r i
dsv
dt
i iv r
d
dt
Angular Velocity
Parallel to moving body
p(t1)
p(t2)
Always changing direction with time???
Always perpendicular to r

Angular Momentum
L r p
vm
r
p
L
L r p
sinr p r p
Perpendicular to R and pOrientation remains constant with time
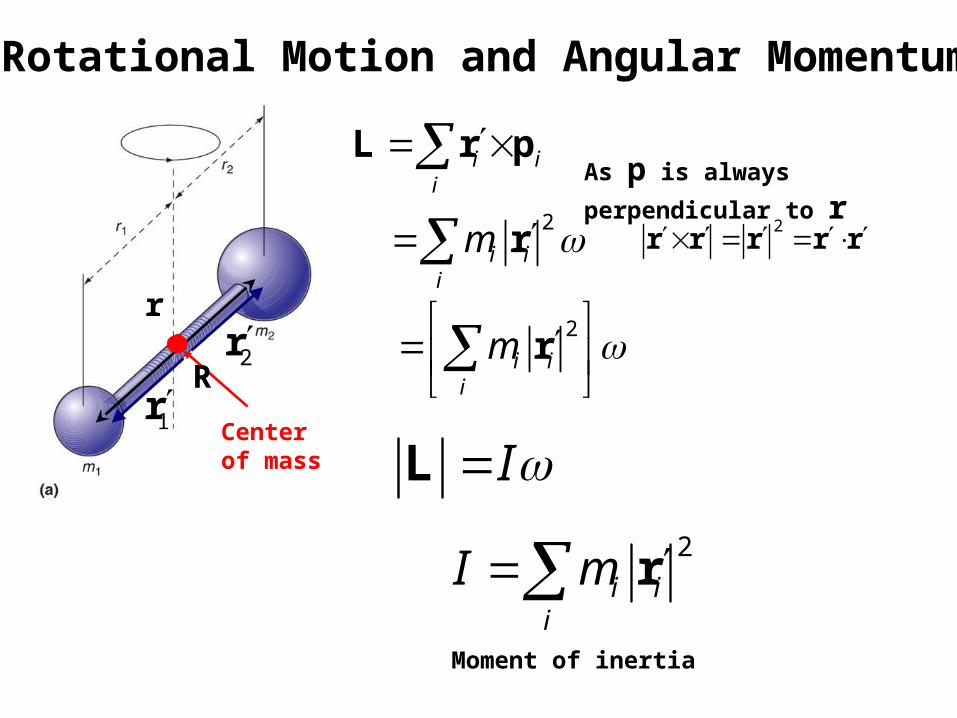
Rotational Motion and Angular Momentum
i ii
L r p
IL
2
i ii
m r
2
i ii
m r
2
i ii
I m r
Moment of inertia
As p is always perpendicular to r
2 r r r r r
r
Center of mass
R1r
2r
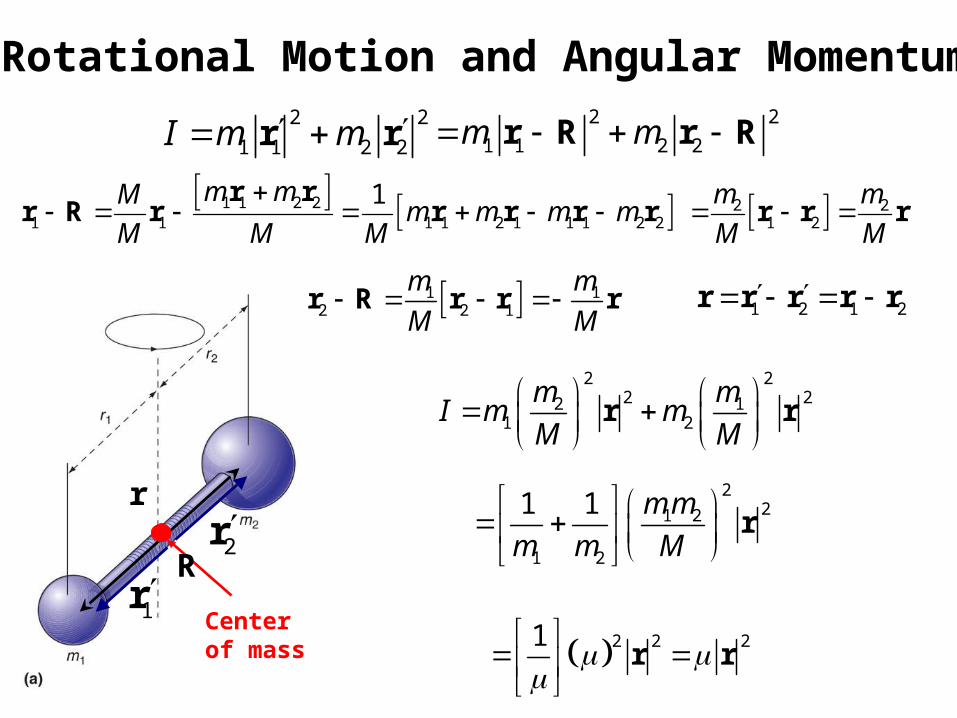
Rotational Motion and Angular Momentum
1 2 1 2 r r r r r
2 2
1 1 2 2I m m r r
r
Center of mass
R1r
2r
2 2
1 1 2 2m m r R r R
2 21 2
m m
M M r r r
1 1 2 21 1 1 1 2 1 1 1 2 2
1m mMm m m m
M M M
r rr R r r r r r
221 2
1 2
1 1 m m
m m M
r
2 221
r r
1 12 2 1
m m
M M r R r r r
2 22 22 1
1 2
m mI m m
M M
r r

Rotational Motion and Angular MomentumClassical Kinetic Energy
2
. .2
i
i i
pK E
m
22
2 2i ii i
i i
m rm v
222
2 2 2
LII
I I
2 22 2
2 2i ii
m r
r
r
Center of mass
R1r
2r

Rotational Motion and Angular Momentum2
. .2
LK E
I
21ˆ ˆ2
K LI
22ˆ
2K
r
2ˆˆ ( ) ( )
2
LK
I r r
22ˆ ( ) ( )
2K
rr r
L̂ i r r
2 r rr r Since r and p are perpendicular
r
Center of mass
R1r
2r
2 2
2 2 2 2ˆ IL
r r r r
r rr r
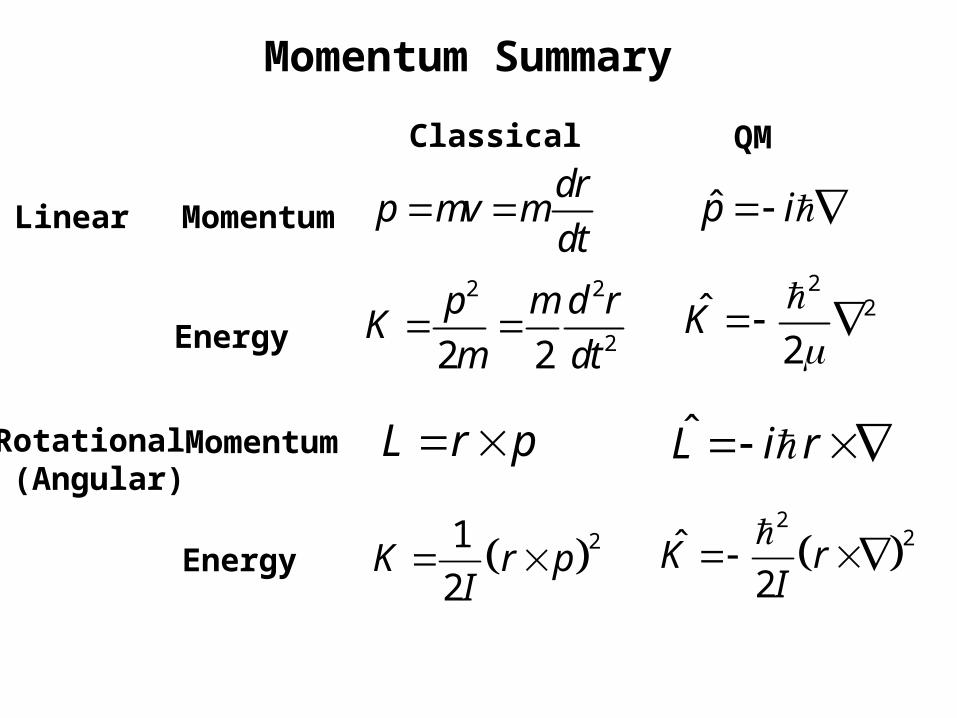
Momentum Summary
21
2K r p
I
22ˆ
2K
L̂ i r
Linear
Classical QM
Rotational (Angular)
Momentum
Energy
Momentum
Energy 2
2ˆ2
K rI
p̂ i
L r p
drp mv m
dt
2 2
22 2
p m d rK
m dt

Angular Momentum
L r p
x y zx y z p p p L
x y z
x y z
p p p
i j k
L

Angular Momentum
x y zL L L L i j k
x z y
y x z
z y x
L yp zp
L zp xp
L xp yp

Angular Momentum in QM
ˆ ˆ ˆ ˆˆ( ) ( )
ˆ ˆ ˆˆˆ( ) ( )
ˆ ˆˆ ˆ ˆ( ) ( )
x x z y
y y x z
z z y x
L L yp zp
L L zp xp
L L xp yp
r r
r r
r r
ˆ
ˆ
ˆ
x
y
z
d dL i y z
dz dy
d dL i z x
dx dz
d dL i x y
dy dx
ˆ ˆ ˆ ˆx y zL L L L i j k

Angular Momentum
ˆ ˆ ˆ ˆi L r p r
d d dx y z i
dx dy dz
L

Angular Momentum
x y zL L L L i j k
ˆ
ˆ
ˆ
x
y
z
d dL i y z
dz dy
d dL i z x
dx dz
d dL i x y
dy dx

Two-Dimensional Rotational Motion
cos( )x r
x
y
r
sin( )y r
d d
dx dy
i j
How to we get:
( , ) ( , )d d
r rdx dy
i j
Polar Coordinates
cos( ) sin( )d dx d dy d d d
dr dr dx dr dy dx dy
sin( ) cos( )d dx d dy d d d
r rd d dx d dy dx dy
2 22
2 2
d d
dx dy
2 22
2 2( , ) ( , )
d dr r
dx dy

Two-Dimensional Rotational Motion
cos( ) sin( )d dx d dy d d d
dr dr dx dr dy dx dy
d d dr x y
dr dx dy
2 2
1 d x d y d
r dr r dx r dy
2 2
1 d d x d y d d dr x y
r dr dr r dx r dy dx dy
2 2 2 2
x d d x d d y d d y d dx y x y
r dx dx r dx dy r dy dx r dy dy
2 2 2 2
2 2 2 2 2 2 2 2
x d x d xy d yx d y d y d
r dx r dx r dxdy r dydx r dy r dy
2 2 2 2
xx d d xy d d yx d d y dy d d dy
r dx dx r dx dy r dy dx r dy dy dy dy
product rule

Two-Dimensional Rotational Motion
sin( ) cos( )d dx d dy d d d d d
r r y xd d dx d dy dx dy dx dy
2
2
d d d d dy x y x
d dx dy dx dy
2 22 2
2 2
d dx d d d d d d dy y yx x xy x
dx dx dy dx dy dx dy dx dy
d d d d d d d dy y y x x y x x
dx dx dx dy dy dx dy dy
2 2 2 2 2
2 2 2 2 2 2 2 2 2 2
1 d y d y d yx d x d xy d x d
r d r dx r dy r dxdy r dx r dydx r dy
2 22 2
2 2
d d d d d dy y yx x xy x
dx dy dxdy dx dydx dy
product rule

Two-Dimensional Rotational Motion2 2 2 2
2 2 2 2 2 2 2 2
1 d d x d x d xy d yx d y d y dr
r dr dr r dx r dx r dxdy r dydx r dy r dy
2 2 2 2 2
2 2 2 2 2 2 2 2 2 2
1 d y d x d yx d xy d y d x d
r d r dx r dx r dxdy r dydx r dy r dy
2 2 2 2 2 2 2 2 2
2 2 2 2 2 2 2 2 2 2
1 1d d d x d y d x d y dr
r dr dr r d r dx r dx r dy r dy
2 2 2 2 2 2
2 2 2 2 2 2
x y d x y d
r r dx r r dy
2 22
2 2
d d
dx dy

Two-Dimensional Rotational Motion
22
2 2
1 1d d dr
dr r dr r d
2 2 2
2 2 2 2
1 1d d d d dr
dr r dr r d dx dy
2 2 22
2 2
1 1ˆ2 2
d d dH r
dr r dr r d

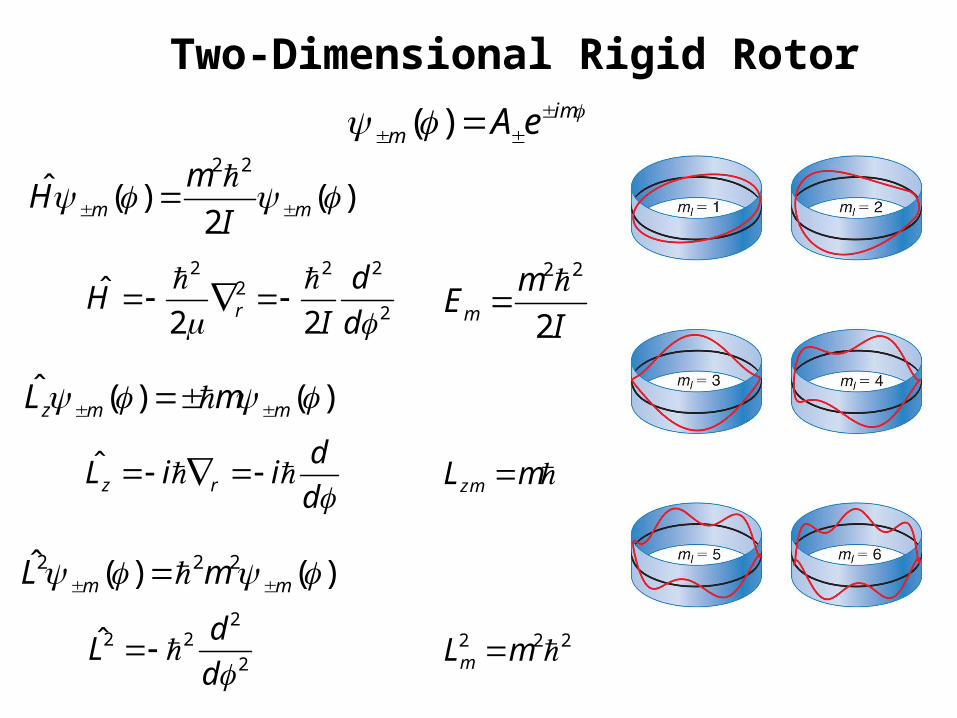
Two-Dimensional Rigid Rotor
22ˆ ( , ) ( , ) ( , )
2H r r E r
Assume r is rigid, ie. it is constant
2 2 22
2 2
1 1ˆ2 2
d d dH r
dr r dr r d
2 2 22
2 2
1ˆ2 2r
dH
r d
2ˆˆ
2zL
HI
ˆz r
dL i i
d
As the system is rotating about the z-axis

18_05fig_PChem.jpg
Two-Dimensional Rigid Rotor
2 2
2( ) 0
2
dE
I d
2
2 2
2( ) 0
d IE
d
22
2( ) 0
dk
d
r
2 22
2
2
2
I kk E
I
2 2
2ˆ ( ) ( ) ( )
2
dH E
I d

18_05fig_PChem.jpg
Two-Dimensional Rigid Rotor
22
2( ) 0
dk
d
( ) 0d d
ik ikd d
( ) 0 & ( ) 0d d
ik ikd d
( ) ikA e ( ) ikA e

18_05fig_PChem.jpg
Two-Dimensional Rigid Rotor
( ) ikA e Periodic
2 2 2 2
2 2 m
k mE E
I I
2( 2 ) ( )ik ikA e A e
2 1 2 2ike k m k m k
m = quantum number
( ) imm A e ( ) im
m A e
18_05fig_PChem.jpg
Two-Dimensional Rigid Rotor
( ) imm A e
2 2 22
2ˆ
2 2r
dH
I d
ˆz r
dL i i
d
2 2
ˆ ( ) ( )2m m
mH
I
2 2
2m
mE
I
ˆ ( ) ( )z m mL m
22 2
2ˆ dL
d
2 2 2ˆ ( ) ( )m mL m
zmL m
2 2 2mL m

Two-Dimensional Rigid Rotor
( ) imm A e
ˆ ( ) ( )m mH E 2 2
2m
mE
I
ˆ ( ) ( )z m mL m
zmL m
E
mzmLmEm
6
5
4
3
2
1
2
I
18.0
12.5
8.0
4.5
2.00.5
6
5
4
3 2
6
5
4
321
Only 1 quantum number is require to determine the state of the system.

Normalization
( ) imm A e
2 2
* *
0 0
( ) ( ) 1 & ( ) ( ) 1m m m m
** *( ) im imm A e A e
( ) imm A e
*A A
*( ) ( )m m

Normalization
2 2
*
0 0
1 ( ) ( ) ( ) ( )m m m md d
2 2 22 2
0 0 0
1 1 [2 ]im im im imA A e e d A A e e d A d A
1
2A
1( )
2im
m e
1( )
2im
m e
2 2
*
0 0
( ) ( ) ( ) ( ) 1m m m md

18_06fig_PChem.jpg
1( )
2im
m e
Orthogonality
2
*
,
0
( ) ( )m m m md
*2
0
1 1
2 2im ime e d
2
0
1
2im ime e d
m = m’ 2
0
1 21 1
2 2d
m ≠ m’
2 2
0 0
1 1cos( ) sin( )
2 2i m me d m m i m m d
2 2
0 0
1cos( ) sin( )
2 2
im m d m m d
1
0 0 02 2
i
14_01fig_PChem.jpg
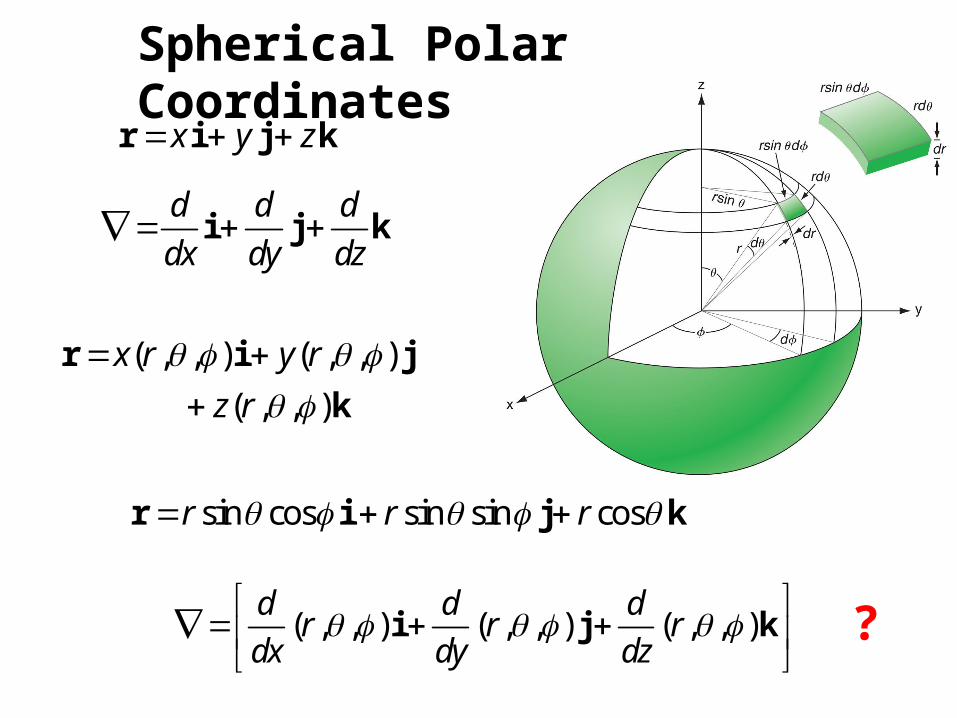
x y z r i j k
sin cos sin sin cosr r r r i j k
Spherical Polar Coordinates
d d d
dx dy dz i j k
( , , ) ( , , ) ( , , )d d d
r r rdx dy dz
i j k
( , , ) ( , , )
( , , )
x r y r
z r
r i j
k
?

14_01fig_PChem.jpg
sin cos sin sin cosx r y r z r
Spherical Polar Coordinates
d dx d dy d dz d
dr dr dx dr dy dr dz
cos sin sin sin cosd d d d
dr dx dy dz
cos cos sin cos sind d d d
r r rd dx dy dz
sin sin cos sind d d
r rd dx dy
.... & ....d d
d d

14_01fig_PChem.jpg
The Gradient in Spherical Polar Coordinates
cos sin sin sin cos
cos cos sin cos sin
sin sin cos sin 0
d d
dr dxd d
r r rd dy
r rd d
d dz
.SP Cart WGradient in Spherical Polar coordinates expressed in Cartesian Coordinates

14_01fig_PChem.jpg
The Gradient in Spherical Polar Coordinates
cos cos sincos sin
sinsin cos cos
sin sinsin
sincos 0
Cart
d d
dx r r drd d
dy r r ddd
r ddz
1.Cart SP
WGradient in Cartesian coordinates expressed in Spherical Polar Coordinates

14_01fig_PChem.jpg
The Gradient in Spherical Polar Coordinates
1.
cos cos sincos sin
sin
sin cos cossin sin
sin
sincos
Cart SP
d d dddr r d r ddx
d d d d
dy dr r d r d
d dd
dr r ddz
W
.ˆ
Carti L r
1ˆSPi L r W

14_01fig_PChem.jpg
The Gradient in Spherical Polar Coordinates
cos cos sincos sin
sincos( )sin( )
sin cos cossin( )sin( ) sin sin
sincos( )
sincos
d d d
dr r d r dr
d d di r
dr r d r dr
d d
dr r d
ˆ ˆ ˆ ˆx y zL L L L i j k
cosˆ sin cossin
cosˆ cos sinsin
ˆ
x
y
z
d dL i
d d
d dL i
d d
dL i
d
ˆ i L r

14_01fig_PChem.jpg
The Laplacian in Spherical Polar Coordinates
22 2
2 2 2 2 2
1 1 1sin
sin sin
d d d d dr
r dr dr r d d r d
22
2
1.....
dr
r dr OR OR
22
2
2....
d d
dr r dr
Radial Term Angular Terms
2 1 1Cart SP SP
W W

Three-Dimensional Rigid Rotor
Assume r is rigid, ie. it is constant. Then all energy is from rotational motion only.
2 2 2 2 22
. 2 2 2ˆ
2 2Cart
d d dH
dx dy dz
2 2 22
2 2 2 2
1 1 1ˆ sin2 2 sin sinSP
d d d d dH r
r dr dr r d d r d
2 2
2 2 2
1 1ˆ sin2 sin sin
d d dH
r d d d
2
2I
L
22 2
2 2
1 1ˆ sinsin sin
d d dL
d d d

18_05fig_PChem.jpg
Three-Dimensional Rigid Rotor
2 2
2 2
1 1ˆ ( , ) sin ( , ) ( , )2 sin sin
d d dH E
I d d d
2 2
2 2
1 1sin ( ) ( ) ( ) ( )
2 sin sin
d d dE
I d d d
22
2sin sin ( ) ( ) ( ) ( ) sin ( ) ( )
d d d
d d d
2
2
2
2
IEE
I
Separable?

Three-Dimensional Rigid Rotor
22
2
1( )
( )
dk
d
2 21sin sin ( ) sin
( )
d dk
d d
22
2( )sin sin ( ) ( ) ( ) sin ( ) ( )
d d d
d d d
22
2
1 1sin sin ( ) sin ( )
( ) ( )
d d d
d d d
Two separate independent equations
k2= separation Constant

18_05fig_PChem.jpg
Three-Dimensional Rigid Rotor
22
2( ) 0
dk
d
1( )
2im
m e
1( )
2im
m e
k m k
22
2
1( )
( )
dk
d
Recall 2D Rigid Rotor

18_05fig_PChem.jpg
Three-Dimensional Rigid Rotor
2 21sin sin ( ) sin
( )
d dm
d d
2 2sin sin sin ( ) ( )d d
md d
, ( ) cos( )mml m l lC P
This equation can be solving using a series expansion, using a Fourier Series:
Where ( 1)l l 2
2 ( 1)
2 2 l
l lE E
I I
Legendre polynomials
2 2sin sin ( ) sin ( ) ( )d d
md d

Three-Dimensional Rigid Rotor
2 ( 1)
2l
l lE
I
2 2
2 2
1 1sin ( , ) ( , )
2 sin sin
d d dE
I d d d
1( )
2im
m e
, ,ˆ ( ) ( ) ( ) ( )l m m l l m mH E , ( ) (cos( ))mm
l m l lC P
21 ( 1) 1ˆ (cos( )) (cos( ))22 2
m mm im m iml l l l
l lH C P e C P e
I
,
1( , ) (cos( ))
2mm im
l m l lY C P e
Spherical Harmonics
, ,ˆ ( , ) ( , )l m l l mHY E Y
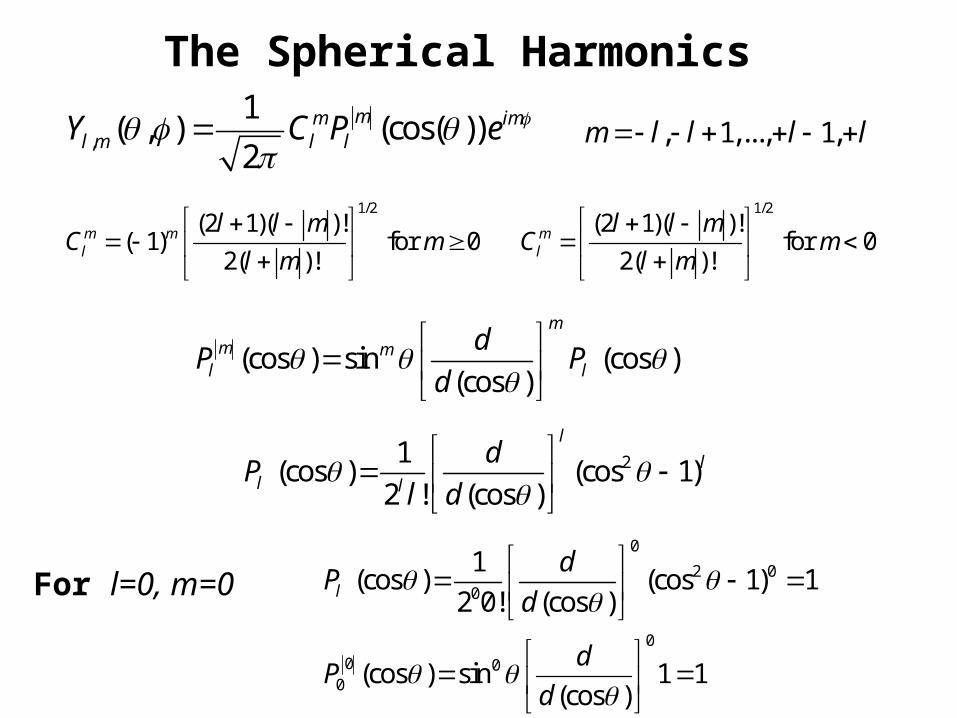
The Spherical Harmonics
,
1( , ) (cos( ))
2mm im
l m l lY C P e
, 1,..., 1,m l l l l
1/2(2 1)( )!
for 02( )!
ml
l l mC m
l m
1/2(2 1)( )!
( 1) for 02( )!
m ml
l l mC m
l m
For l=0, m=0
21(cos ) (cos 1)
2 ! (cos )
l
ll l
dP
l d
(cos ) sin (cos )(cos )
m
m ml l
dP P
d
0
2 00
1(cos ) (cos 1) 1
2 0! (cos )l
dP
d
0
0 00 (cos ) sin 1 1
(cos )
dP
d
The Spherical Harmonics
,
1( , ) (cos( ))
2mm im
l m l lY C P e
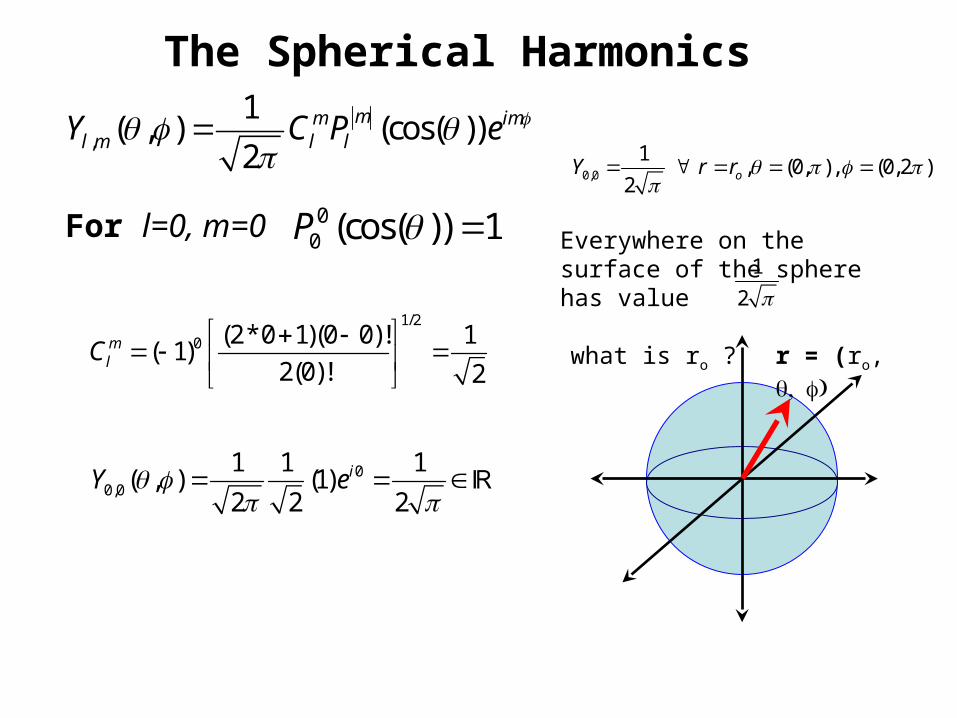
00 (cos( )) 1P
00,0
1 1 1( , ) (1)
2 2 2iY e
For l=0, m=0
1/2
0 (2*0 1)(0 0)! 1( 1)
2(0)! 2mlC
0,0
1, (0, ), (0,2 )
2oY r r
Everywhere on the surface of the sphere has value 1
2
what is ro ? r = (ro,

The Spherical Harmonics
r = (1,
Normalization:
*
0,0 0,0
S
Y Y dV
2 sin( ) sin( )o
dV dxdydz
r d d d d
*( ) ( , )
( ) ( , )
1 11
2 2
f o f j f f f
i o i i i i i
x r y f x z g x y
x r y f x y g x y
dxdydz
2 2 2 2Where ox y z r
*2
0 0
1 1sin( )
2 2d d
In Spherical Polar Coordinates
2
0 0
1sin( )
4d d
2
0 0
1sin
4d d
2
0 0
1 1cos 2(2 ) 1
4 4
1or
r is fixed at ro.
The wavefunction is an angular function which has a constant value
over the entire unit circle.
X
Y
Z
1
2

The Spherical Harmonics
01,0
1 3 3( , ) 1 cos( ) cos( )
22 2iY e
1,0
3( ) cos( )
2(0, ), (0,2 )
Y
r = (1,
X
Y
Z
The wavefunction is an angular function which has a value varying as on the entire unit circle.
3cos( )
2
The spherical Harmonics are often plotted as a vector strating from the origin with orientation and and its length is Y()
Along z-axis
2 11 1
1(cos ) (cos 1) cos
2 1! (cos )
dP
d
0
0 01 (cos ) sin cos cos
(cos )
dP
d
For l=1, m=0
18_05fig_PChem.jpg
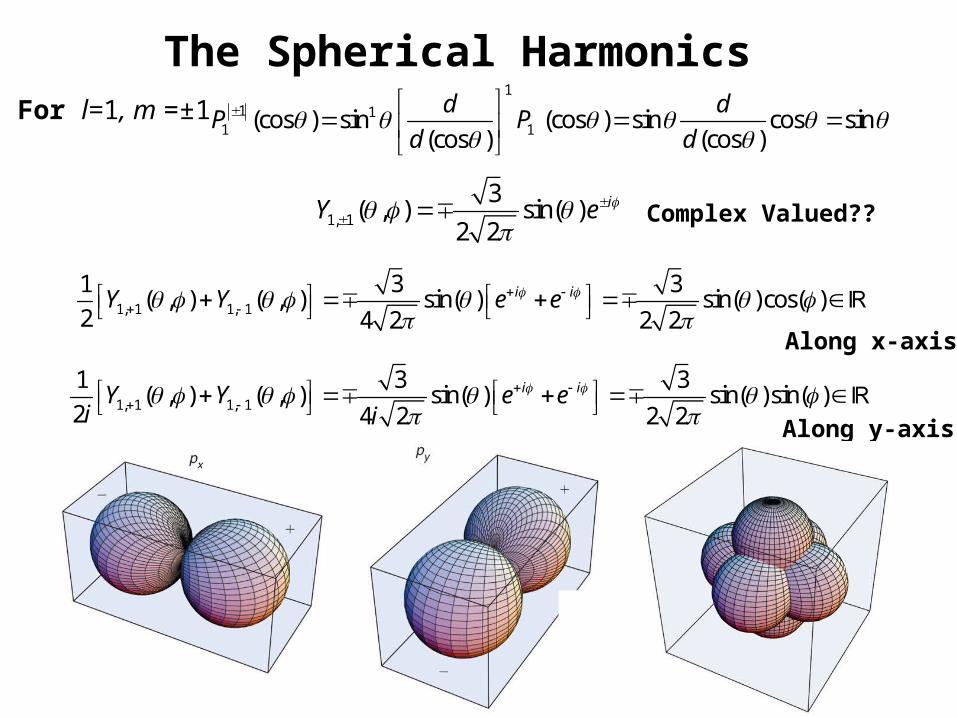
The Spherical Harmonics
1, 1
3( , ) sin( )
2 2iY e
Complex Valued??
1, 1 1, 1
1 3 3( , ) ( , ) sin( ) sin( )cos( )
2 4 2 2 2i iY Y e e
Along x-axis
1, 1 1, 1
1 3 3( , ) ( , ) sin( ) sin( )sin( )
2 4 2 2 2i iY Y e e
i i
Along y-axis
1
1 11 1(cos ) sin (cos ) sin cos sin
(cos ) (cos )
d dP P
d d
For l=1, m =±1

18_05fig_PChem.jpg
The Spherical Harmonics
0 22
1(cos( )) 3cos ( ) 1
2P
12 (cos( )) 3sin( )cos ( )P 2 2
2 (cos( )) 3sin ( )P
22,0
5( , ) (3cos ( ) 1)
4Y
2, 1
15( , ) sin cos
2 2iY e
2, 1 2, 1 15sin cos cos
2 8
Y Y
2, 1 2, 1 15sin sin cos
2 8
Y Y
i
YZXZ
2 22, 2
15( , ) sin
4 2iY e

The Spherical Harmonics Are Orthonormal
2*, , , , ,
0 0
sin( )l m l m l m l mY Y d d
2
0 0
1 1(cos ) (cos ) sin
2 2m mm im m im
l l l lC P e C P e d d
2
0 0
1(cos ) (cos ) sin
2m mim im m m
l l l le e d C P C P d
2
,
0
(cos ) (cos ) sin2
m mm ml l
m m l l
C CP P d
2
,
0
When (cos ) (cos ) sin2
m mm ml l
l l l l
C Cm m P P d
Example0
1 (cos( )) cos( )P 00 (cos( )) 1P
2 20 10 10 0 0 11 1
0 1
0 0
(cos ) (cos ) sin cos sin 02 2
C CC CP P d d

Yl,m are Eigenfuncions of H, L2, Lz
,
1( , ) (cos( ))
2mm im
l m l lY C P e
2 2
2 2
1 1ˆ sin2 sin sin
d d dH
I d d d
22 2
2 2
1 1ˆ sinsin sin
d d dL
d d d
ˆz
dL i
d
2
, ,ˆ ( , ) ( 1) ( , )
2l m l mHY l l YI
2 2, ,
ˆ ( , ) ( 1) ( , )l m l mL Y l l Y
, ,ˆ ( , ) ( , )z l m l mL Y m Y
2
( 1)2lE l l
I
2 2 ( 1)lL l l
( 1)lL l l
zL m

Dirac Notation
*,i j i j
S
ds
*,i j i j v v
,
N
i i m mm
c m is complete*,m m m m
S
* * * *,1 ,2 , 1 ,i i i i N i Nc c c c v
,1
,2
, 1
,
j
j
j
j N
j N
c
c
c
c
v
Continuous Functions
Vectors
*,|i j i j i j
S
ds i i vDirac
j j v
*ˆ ˆ ˆ ˆi j i j i j
S
ds O O O O
Bra
Ket
ˆ | j j jH E

Dirac Notation
2*
1,1 1,1 1,1 1,1
0 0
ˆ ˆ ˆ( , ) ( , )sin | |H Y HY d d Y H Y
1,1 1,1
ˆ|Y HY
2 2 2
1,1 1,1 1,1 1,1 1,1ˆ 1(1 1) |
2HY Y Y Y Y
I I I
2 2
1,1 1,1|Y YI I
2
, ,ˆ ( , ) ( 1) ( , )
2l m l mHY l l YI
2
1,1 1,1 1,0 1,0 1, 1 1, 1ˆ ˆ ˆ| | | | | |Y H Y Y H Y Y H Y
I
Degenerate

Dirac Notation
22 * 2 2
1,1 1,1 1,1 1,1
0 0
ˆ ˆ ˆ( , ) ( , )sin | |L Y L Y d d Y L Y
2
1,1 1,1ˆ|Y L Y
2 2 2 21,1 1,1 1,1 1,1 1,1
ˆ 1(1 1) 2 | 2L Y Y Y Y Y
2 21,1 1,12 | 2Y Y
2 2, ,
ˆ ( , ) ( 1) ( , )l m l mL Y l l Y
2L
2 21, 1 1, 1
ˆ| 2Y L Y 22, 1 1, 1
ˆ| ?Y L Y 2 22, 1 2, 1
ˆ| 2Y L Y
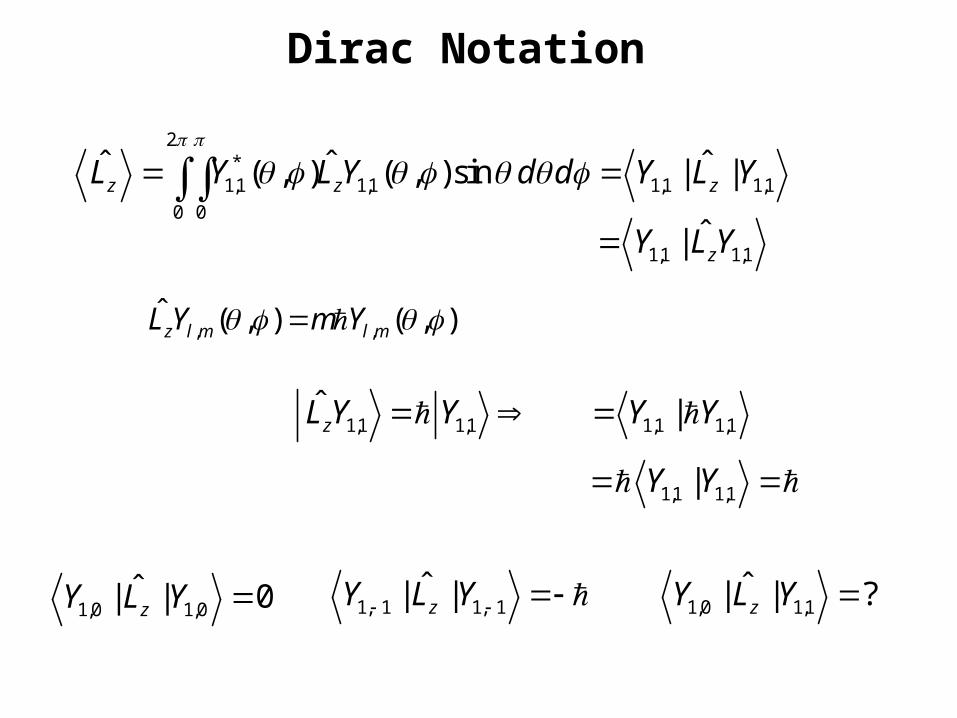
Dirac Notation
2*
1,1 1,1 1,1 1,1
0 0
ˆ ˆ ˆ( , ) ( , )sin | |z z zL Y L Y d d Y L Y
1,1 1,1
ˆ| zY L Y
1,1 1,1 1,1 1,1ˆ |zL Y Y Y Y
, ,ˆ ( , ) ( , )z l m l mL Y m Y
1,1 1,1|Y Y
1,0 1,0ˆ| | 0zY L Y 1, 1 1, 1
ˆ| |zY L Y 1,0 1,1ˆ| | ?zY L Y

18_16fig_PChem.jpg
3-D Rotational motion & The Angular Momentum Vector
zL m
( 1)l l L
m indicates the orientation of the angular momentum with respect to z-axis
L
l determines the length of the angular momentum vector
Rotational motion is quantized not continuous. Only certain states of motion are allowed that are determined by quantum
numbers l and m.

Three-Dimensional Rigid Rotor States
E
l zmLlE,..,lm mY
33,2,1,0, 1, 2, 3Y
22,1,0, 1, 2Y
11,0, 1Y
2
I
6.0
3.0
1.0
0.5
0
3
2
10
Only 2 quantum numbers are require to determine the state of the system.
2
( 1)2lE l l
I
( 1)lL l l zL m
12
6
2
Lm
0
1 0 -1 00Y
1 0-1 -2
2
1 0-1 -2
2
-3
3
0
2
0
2
32
0
22

19_01tbl_PChem.jpg
Rotational Spectroscopy

19_13fig_PChem.jpg
Rotational Spectroscopy2
2( 1)
2Jo
E J Jr
1J JE E E
2
1E JI
J : Rotational quantum number
2
2( 1)( 2) ( 1)
2 o
J J J Jr
2
( 1)2JE J J
I

Rotational Spectroscopy
hcE h hc
2
( 1)
4
h J
Ic
2 ( 1)B J
2 28 o
hB
r c
Wavenumber (cm-1)
Rotational Constant
1J Jv c c
2 ( 1 1) 2 ( 1) 2c B J B J cB
Frequency (v)
vv
Line spacing
Rotational Spectroscopy
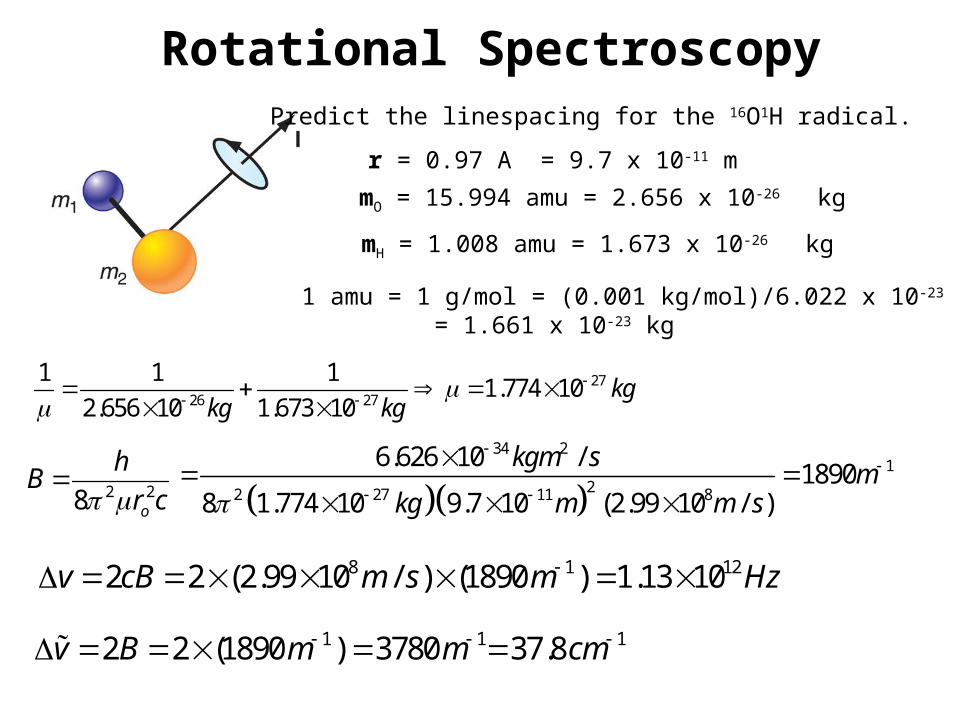
8 1 122 2 (2.99 10 / ) (1890 ) 1.13 10v cB m s m Hz
Predict the linespacing for the 16O1H radical.
mO = 15.994 amu = 2.656 x 10-26 kg
mH = 1.008 amu = 1.673 x 10-26 kg
r = 0.97 A = 9.7 x 10-11 m
1 amu = 1 g/mol = (0.001 kg/mol)/6.022 x 10-23 mol-1
= 1.661 x 10-23 kg
2726 27
1 1 11.774 10
2.656 10 1.673 10kg
kg kg
2 28 o
hB
r c
34 2
122 27 11 8
6.626 10 /1890
8 1.774 10 9.7 10 (2.99 10 / )
kgm sm
kg m m s
1 1 12 2 (1890 ) 3780 37.8v B m m cm

Rotational SpectroscopyThe line spacing for 1H35Cl is 21.19 cm-1,determine its bond length .
mCl = 34.698 amu = 5.807 x 10-26 kg
mH = 1.008 amu = 1.673 x 10-26 kg
2726 27
1 1 11.626 10
5.807 10 1.673 10kg
kg kg
2 2 28 8oo
h hB r
r c B c
34 2
10
1 2 27 8
6.626 10 /1.257 10 1.257
(1059.5 )8 1.626 10 (2.99 10 / )
kgm sm A
m kg m s
11(21.19 )(100 / )
1059.52 2
v cm cm mB m

ˆ
ˆ
ˆ
x
y
z
d dL i y z
dz dy
d dL i z x
dx dz
d dL i x y
dy dx
zL m
( 1)l l L
L
2 2 2 2ˆ ˆ ˆ ˆL x y zL L L
?
?
, ( , )l mY
zL m
2 ( 1)L l l
ˆ ˆ ˆ ˆx y zi L L L L r i j k
The Transverse Components of Angular Momentum
Ylm are eigenfunctions of L2 and Lz but not of Lx and Ly
Therefore Lx and Ly do not commute with either L2 or Lz!!!
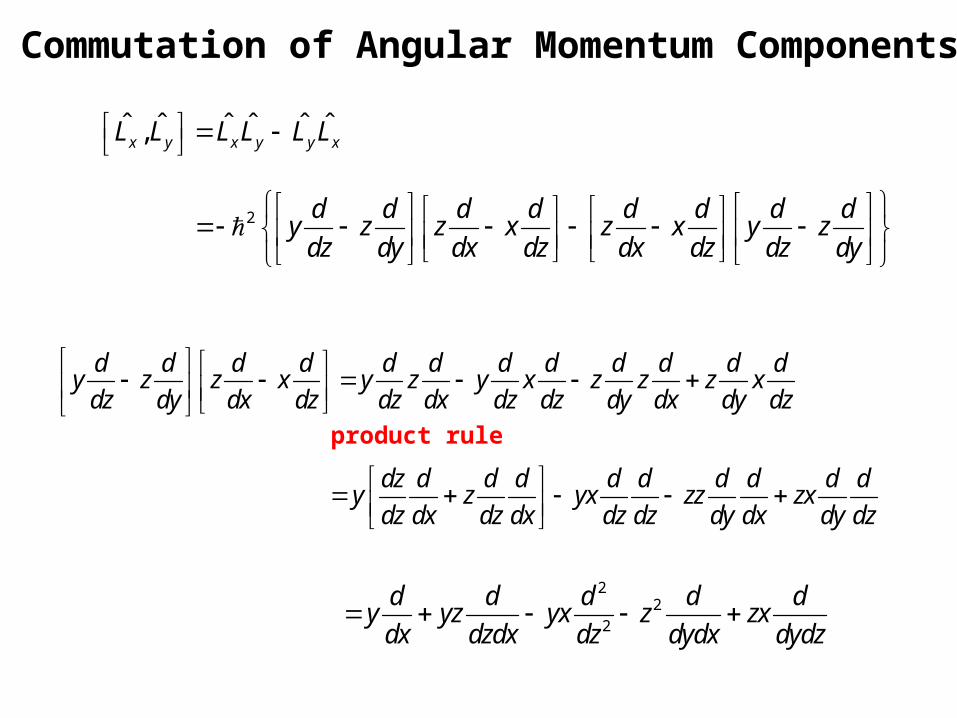
Commutation of Angular Momentum Components
ˆ ˆ ˆ ˆ ˆ ˆ,x y x y y xL L L L L L
d d d d d d d d d d d dy z z x y z y x z z z x
dz dy dx dz dz dx dz dz dy dx dy dz
22
2
d d d d dy yz yx z zx
dx dzdx dz dydx dydz
2 d d d d d d d dy z z x z x y z
dz dy dx dz dx dz dz dy
dz d d d d d d d d dy z yx zz zx
dz dx dz dx dz dz dy dx dy dz
product rule

Commutation of Angular Momentum Components
d d d d d d d d d d d dz x y z z y z z x y x z
dx dz dz dy dx dz dx dy dz dz dz dy
22
2
d d d d dzy z xy x xz
dxdz dxdy dz dy dzdy
d d d d d d dz d d dzy zz xy x z
dx dz dx dy dz dz dz dy dz dy
product rule

Commutation of Angular Momentum Components
22
22
22
2
ˆ ˆ,x y
d d d d dy yz yx z zx
dx dzdx dz dydx dydzL L
d d d d dzy z xy x xz
dxdz dxdy dz dy dzdy
ˆz
d di ih x y i L
dy dx
ˆ ˆ ˆ ˆ ˆ ˆ ˆ,y x y x x y zL L L L L L i L
2 d d d dy x i ih y x
dx dy dx dy

Commutation of Angular Momentum Components
2 ˆx
d d d d d d d dz x y z y z z x i L
dx dz dz dy dz dy dx dz
ˆ ˆ ˆ ˆ ˆ ˆ,x z x z z xL L L L L L
2 ˆy
d d d d d d d dy z x y x y y z i L
dz dy dy dx dy dx dz dy
ˆ ˆ ˆ ˆ ˆ ˆ ˆ,z x z x x z yL L L L L L i L
ˆ ˆ ˆ ˆ ˆ ˆ,y z y z z yL L L L L L
ˆ ˆ ˆ ˆ ˆ ˆ ˆ,z y z y y z xL L L L L L i L

Cyclic Commutation of Angular Momentum
ˆ ˆ ˆ,z x yL L i L ˆ ˆ ˆ,y z xL L i L ˆ ˆ ˆ,x y zL L i L
ˆ ˆ ˆ,z y xL L i L ˆ ˆ ˆ,x z yL L i L ˆ ˆ ˆ,y x zL L i L
ˆ ˆ ˆ,x y zL L i L
ˆ ˆ ˆ,y x zL L i L
ˆxL
ˆyLˆ
zLi
ˆxL
ˆyLˆ
zLi

Commutation with Total Angular Momentum
2 2 2 2ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ, , , ,z x z y z z zL L L L L L L L
2 2 2ˆ ˆ ˆ ˆ ˆ ˆ,x z x z z xL L L L L L
ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ, , ,x z x z z x x z x z z x z x x z x zL L L L L L L L L L L L L L L L L L
ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ, ,x x z z x x z x z xL L L L L L L L L L
ˆ ˆ ˆ ˆ ˆ ˆx x z z x xL L L L L L
ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ, ,x x z x z x x z x x z xL L L L L L L L L L L L
ˆ ˆ ˆ ˆx y y xi L L i L L
Commutation with Total Angular Momentum
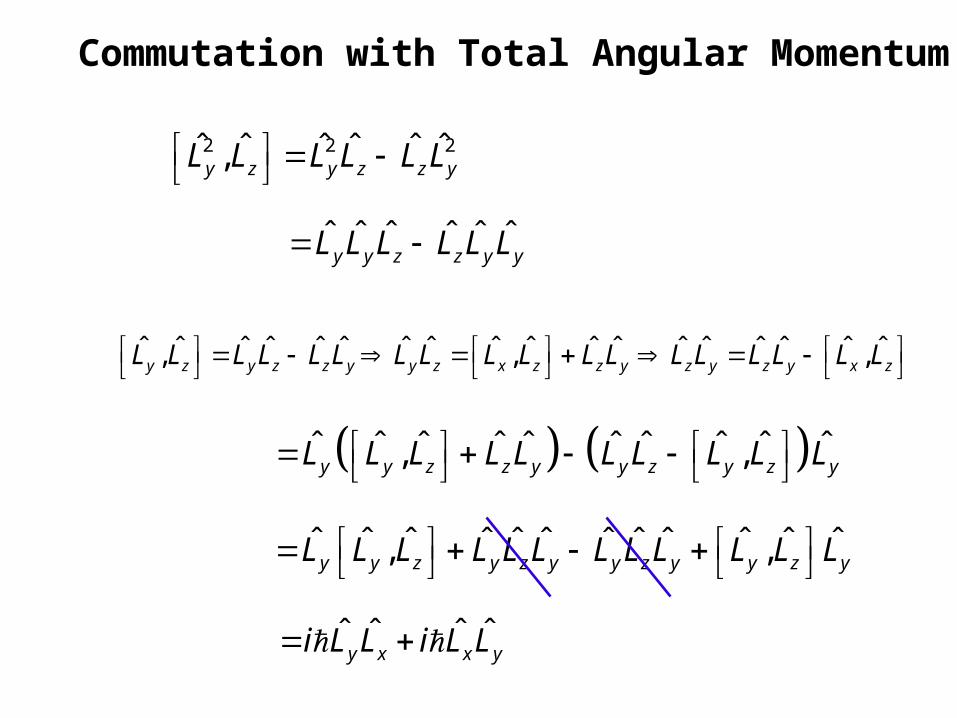
2 2 2ˆ ˆ ˆ ˆ ˆ ˆ,y z y z z yL L L L L L
ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ, ,y y z y z y y z y y z yL L L L L L L L L L L L
ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ, ,y y z z y y z y z yL L L L L L L L L L
ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ, , ,y z y z z y y z x z z y z y z y x zL L L L L L L L L L L L L L L L L L
ˆ ˆ ˆ ˆy x x yi L L i L L
ˆ ˆ ˆ ˆ ˆ ˆy y z z y yL L L L L L

Commutation with Total Angular Momentum
2 2 2 2ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ, , , ,z x z y z z zL L L L L L L L
2 2 2ˆ ˆ ˆ ˆ ˆ ˆ,z z z z z zL L L L L L
ˆ ˆ ˆ ˆ ˆ ˆ 0z z z z z zL L L L L L
ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ 0 0x y y x y x x yi L L i L L i L L i L L
2ˆ ˆ, 0xL L 2ˆ ˆ, 0yL L
This means that only any one component of angular momentum can be determined at one time.

Ladder Operators
ˆ ˆ ˆx yL L iL ˆ ˆ ˆ
x yL L iL
2ˆ ˆy xi L i L ˆ ˆ
y xi L L
ˆ ˆ ˆ ˆ ˆ ˆ, , ,z z x z yL L L L i L L
ˆ ˆ ˆx yL iL L
ˆ ˆ ˆ ˆ ˆ ˆ, , ,z z x z yL L L L i L L
ˆ ˆ ˆx yL iL L
ˆ ˆy xi L L ˆ ˆ( )y xi L i i L

Ladder OperatorsWhat do these ladder operators actually do???
, , ,ˆ ˆ ˆ
l m x l m y l mL Y L Y iL Y ? ?
Recall That: ˆ ˆ ˆ,zL L L ˆ ˆ ˆ ˆ ˆ
z zL L L L L
, ,ˆ ˆ ˆ ˆ ˆ
l m z z l mL Y L L L L Y
, , , ,ˆ ˆ ˆ ˆ ˆ ˆ ˆ
z l m z l m z l m l mL L Y L L Y L L Y m L Y
, , ,ˆ ˆ ˆ ˆ
l m z l m l mL Y L L Y m L Y
, ,ˆ ˆ ˆ( 1)z l m l mL L Y m L Y
, 1 , 1 , , 1ˆ ˆ( 1)z l m l m l m l mL Y m Y L Y Y Raising Operator
Lowering Operator, , 1
ˆl m l mL Y Y Similarly

Therefore is an eigenfunction of with eigen values l and m+1
Ladder Operators
2 2 2ˆ ˆ ˆ ˆ ˆ ˆ, , , 0 0 0x yL L L L i L L i
2 2 2ˆ ˆ ˆ ˆ ˆ ˆ, , , 0x yL L L L i L L
2 2 2, ,
ˆ ˆ ˆ ˆ ˆ ˆ0 , l m l mL L Y L L L L Y
2 2, ,
ˆ ˆ ˆ ˆl m l mL L Y L L Y
2 2, ,
ˆ ˆ ˆ( 1)l m l mL L Y l l L Y
2 2, ,
ˆ ˆ ˆ( 1)l m l mL L Y l l L Y
,ˆ
l mL Y2ˆ ˆ& zL L
Which implies that , , , 1ˆ
l m l m l mL Y C Y

Ladder Operators
, , , 1ˆ
l m l m l mL Y C Y , , , 1
ˆl m l m l mL Y C Y
This is not an eigen relationship!!!! ,l mCis not an normalization constant!!!
These relationships indicates that a change in state, by m=+/-1, is caused by L+ and L-
Can these operators be applied indefinitely??
Remember that there is a max and min value for m, as it represents a component of L, and therefore must be smaller than L. ie.
( 1) ( 1) ( 1)m l l l l m l l
2,0 2,1L̂ Y Y
Why is lL
2,1 2,2L̂ Y Y
2,2ˆ 0L Y Not allowed
?
,ˆ ?
n
l mL Y ,
ˆ ?n
l mL Y
2,0 2, 1L̂ Y Y
2, 1 2, 2L̂ Y Y
2, 2ˆ 0L Y

More Useful Properties of Ladder Operators
2 2 2 2ˆ ˆ ˆ ˆx y zL L L L 2 2 2 2ˆ ˆ ˆ ˆ
x y zL L L L
2 2 2 2, ,
ˆ ˆ ˆ ˆx y l m z l mL L Y L L Y
2 2, ,
ˆ ˆl m z l mL Y L Y
2,( 1) l ml l m Y
This is an eigen equation of a physical observable that is always greater than zero, as it represents the difference between the magnitude of L and the square of its smaller z-component, which are both positive.
2( 1) 0 ( 1) ( 1)l l m l l m l l
This means that m is constrained by l, and since m can be changed by ±1
, 1, 2,...., 2, 1, .m l l l l l l

max,ˆ 0l mL Y
More Useful Properties of Ladder Operators
min,ˆ 0l mL Y
max,ˆ ˆ 0l mL L Y min,
ˆ ˆ 0l mL L Y
Lets show that mmin and mmax are l and -l resp.
ˆ ˆ ˆ ˆ&L L L L Have to be determined in terms of 2ˆ ˆ& zL L
2 2ˆ ˆ ˆ ˆ ˆ ˆ2 2 zL L L L L L
2 2ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆx y x y x x y y x yL L L iL L iL L iL L iL L L
2 2ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆx y x y x x y y x yL L L iL L iL L iL L iL L L
2 21 ˆ ˆ ˆ ˆ ˆ ˆ
2 x yL L L L L L

More Useful Properties of Ladder Operators
ˆ ˆ ˆ ˆ ˆ ˆ, , ,x yL L L L i L L
ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ, , , ( ) ,x x y x x y y yL L i L L i L L i i L L ˆ ˆ ˆ0 ( ) ( ) 0 2z z zi i L i i L L
Also note that:
2 2ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ, 2 2 zL L L L L L L L
2 2ˆ ˆ ˆ ˆ ˆz zL L L L L
2 2ˆ ˆ ˆ ˆ ˆz zL L L L L
2 2ˆ ˆ ˆ ˆ ˆ ˆ2 2 zL L L L L L
2 2ˆ ˆ ˆ ˆ ˆ2 2 2 2z zL L L L L
Similarly

Ladder Operators
2 2,max ,max
ˆ ˆ ˆ ˆ ˆ0 l z z lL L Y L L L Y
max max max
2 2, , ,
ˆ ˆ ˆl m z l m z l mL Y L Y L Y
max max max
2 2 2, max , max ,1 l m l m l ml l Y m Y m Y
2max max ,1 ( 1) l ml l m m Y
max max1 ( 1) 0l l m m
maxm l

Ladder Operators
min min
2 2, ,
ˆ ˆ ˆ ˆ ˆ0 l m z z l mL L Y L L L Y
min min min
2 2, , ,
ˆ ˆ ˆl m z l m z l mL Y L Y L Y
min min min
2 2 2, min , min ,1 l m l m l ml l Y m Y m Y
min
2min min ,1 ( 1) l ml l m m Y
min min1 ( 1) 0l l m m
2min min min1 0 1,&m m l l m l l
Since the minimum value cannot be larger than the maximum value, therefore .
minm l