12: polyphase filters - imperial college london · 12: polyphase filters 12: polyphase filters...
TRANSCRIPT
12: Polyphase Filters
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 1 / 10
Heavy Lowpass filtering
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 2 / 10
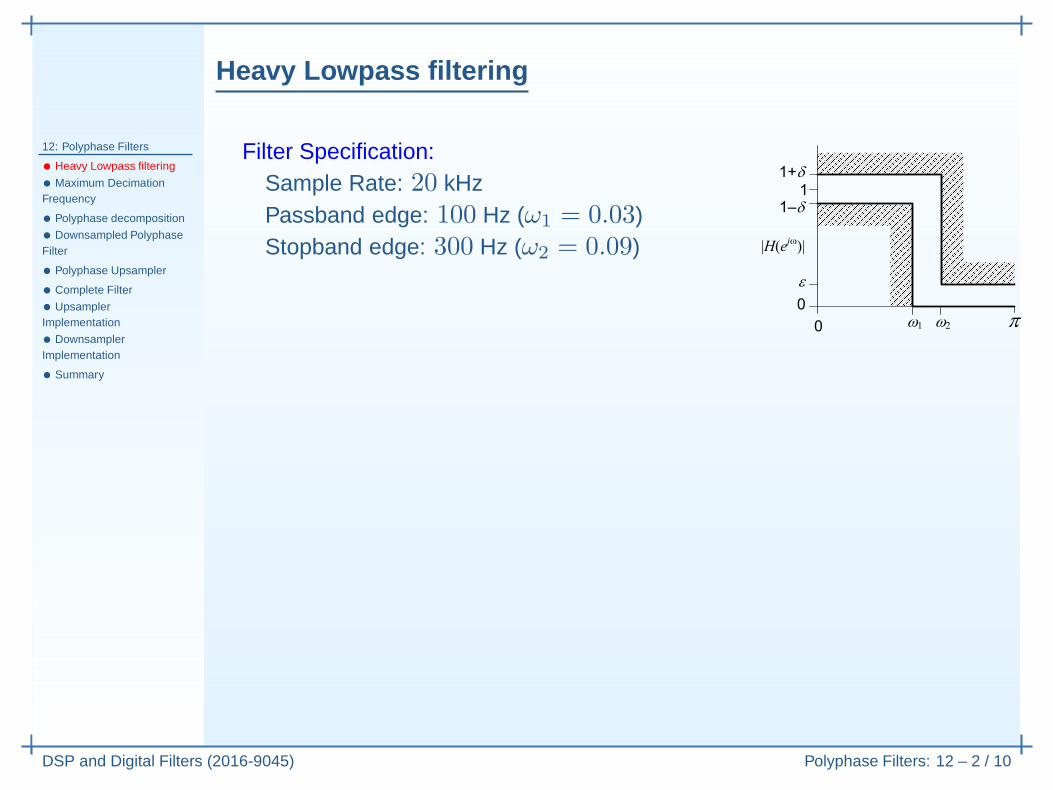
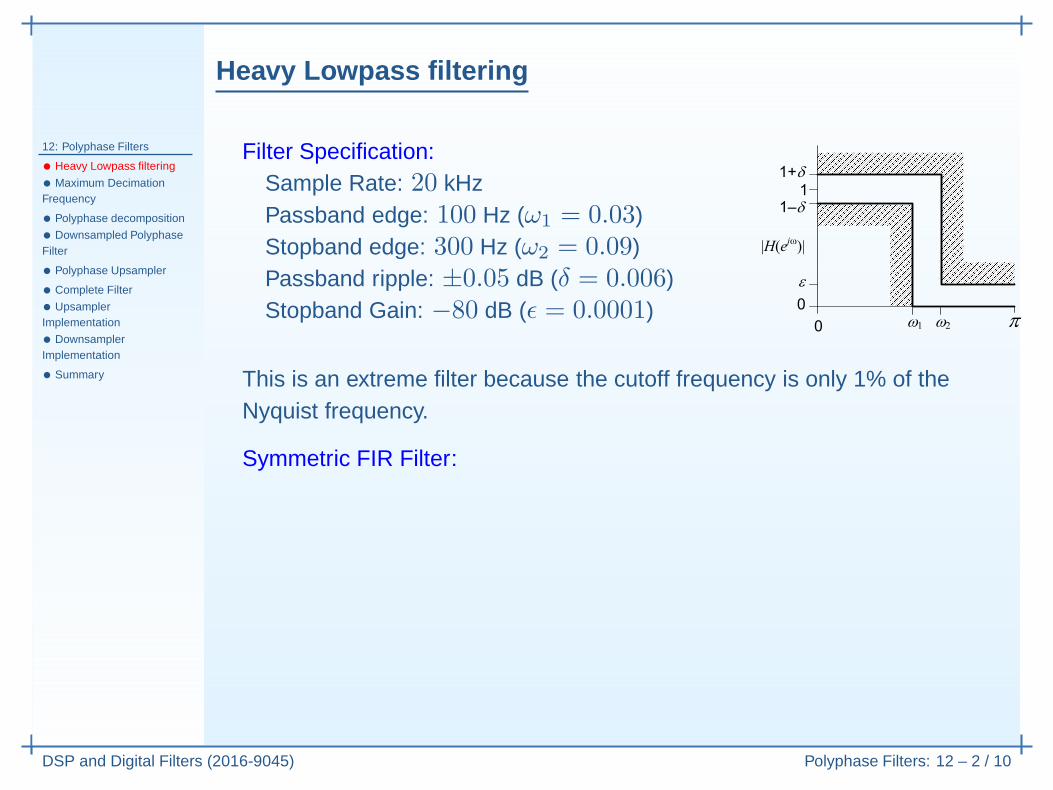
Filter Specification:Sample Rate: 20 kHzPassband edge: 100 Hz (ω1 = 0.03)Stopband edge: 300 Hz (ω2 = 0.09)

Heavy Lowpass filtering
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 2 / 10
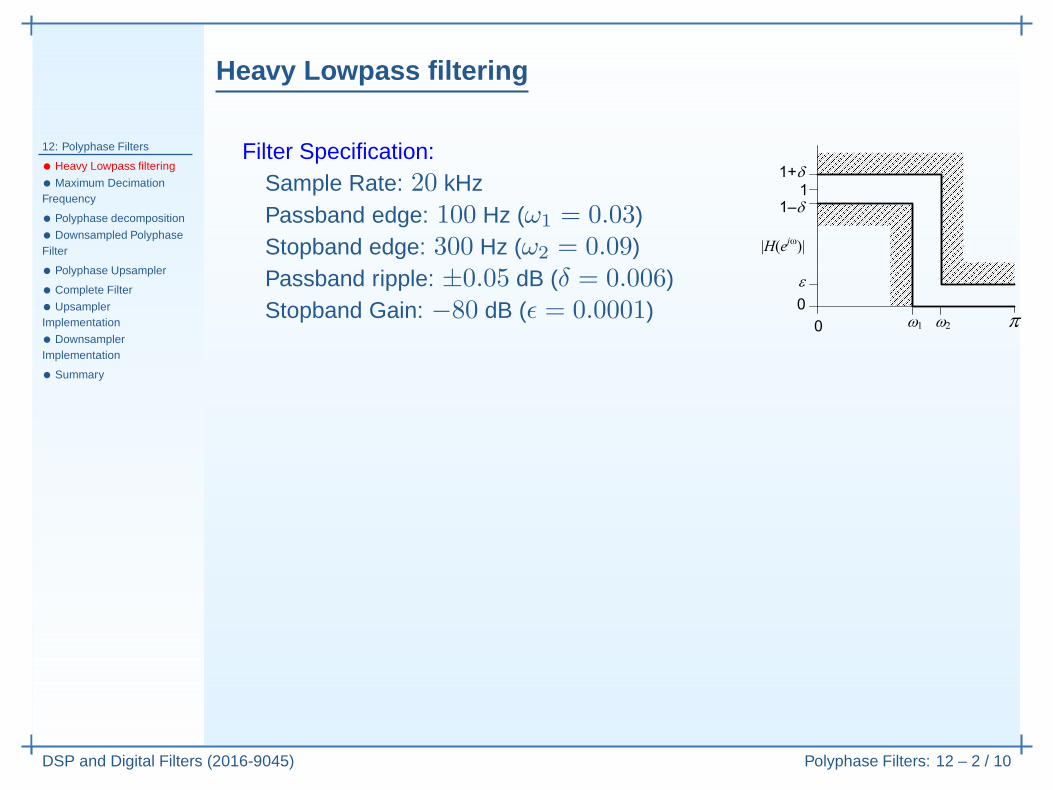
Filter Specification:Sample Rate: 20 kHzPassband edge: 100 Hz (ω1 = 0.03)Stopband edge: 300 Hz (ω2 = 0.09)Passband ripple: ±0.05 dB (δ = 0.006)
Heavy Lowpass filtering
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 2 / 10
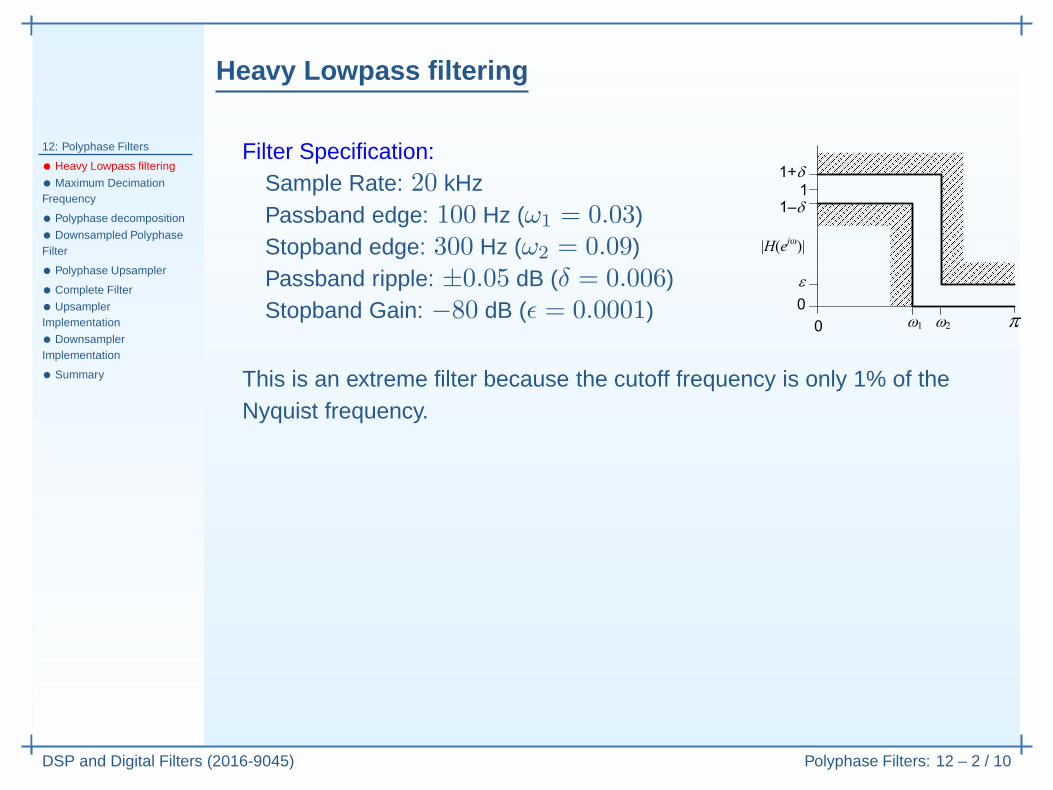
Filter Specification:Sample Rate: 20 kHzPassband edge: 100 Hz (ω1 = 0.03)Stopband edge: 300 Hz (ω2 = 0.09)Passband ripple: ±0.05 dB (δ = 0.006)Stopband Gain: −80 dB (ǫ = 0.0001)
Heavy Lowpass filtering
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 2 / 10
Filter Specification:Sample Rate: 20 kHzPassband edge: 100 Hz (ω1 = 0.03)Stopband edge: 300 Hz (ω2 = 0.09)Passband ripple: ±0.05 dB (δ = 0.006)Stopband Gain: −80 dB (ǫ = 0.0001)
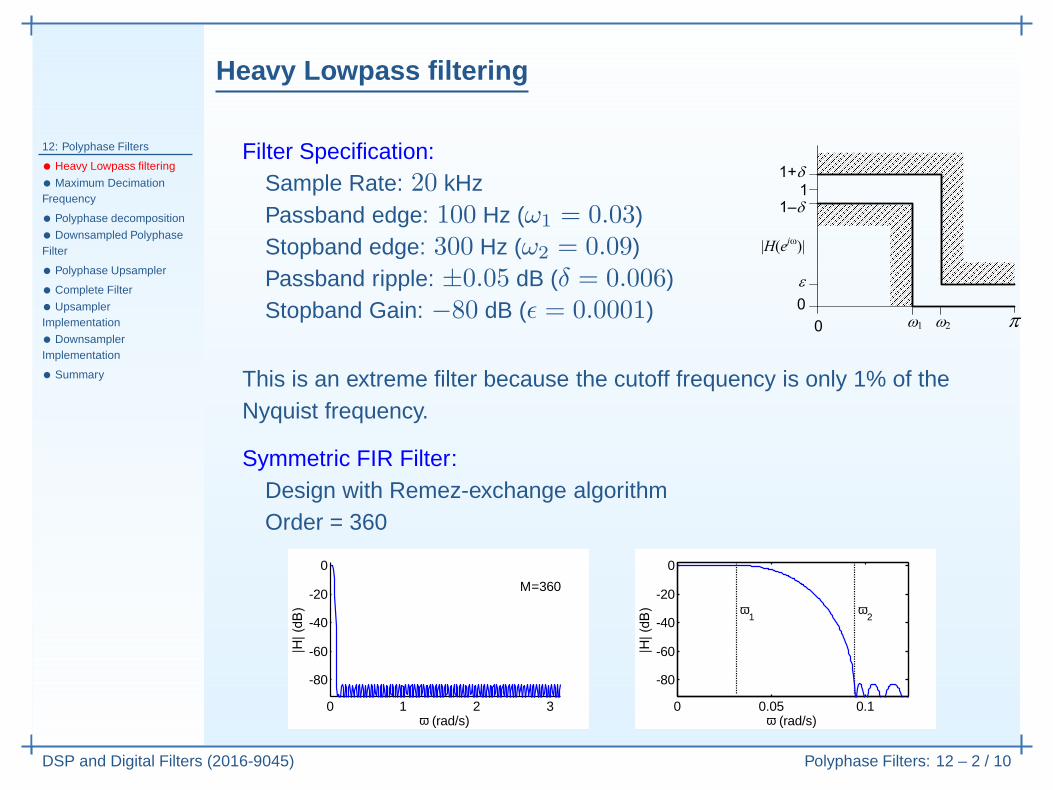
This is an extreme filter because the cutoff frequency is only 1% of theNyquist frequency.
Heavy Lowpass filtering
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 2 / 10
Filter Specification:Sample Rate: 20 kHzPassband edge: 100 Hz (ω1 = 0.03)Stopband edge: 300 Hz (ω2 = 0.09)Passband ripple: ±0.05 dB (δ = 0.006)Stopband Gain: −80 dB (ǫ = 0.0001)
This is an extreme filter because the cutoff frequency is only 1% of theNyquist frequency.
Symmetric FIR Filter:

Heavy Lowpass filtering
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 2 / 10
Filter Specification:Sample Rate: 20 kHzPassband edge: 100 Hz (ω1 = 0.03)Stopband edge: 300 Hz (ω2 = 0.09)Passband ripple: ±0.05 dB (δ = 0.006)Stopband Gain: −80 dB (ǫ = 0.0001)
This is an extreme filter because the cutoff frequency is only 1% of theNyquist frequency.
Symmetric FIR Filter:Design with Remez-exchange algorithmOrder = 360
0 1 2 3
-80
-60
-40
-20
0
M=360
ω (rad/s)
Heavy Lowpass filtering
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 2 / 10
Filter Specification:Sample Rate: 20 kHzPassband edge: 100 Hz (ω1 = 0.03)Stopband edge: 300 Hz (ω2 = 0.09)Passband ripple: ±0.05 dB (δ = 0.006)Stopband Gain: −80 dB (ǫ = 0.0001)
This is an extreme filter because the cutoff frequency is only 1% of theNyquist frequency.
Symmetric FIR Filter:Design with Remez-exchange algorithmOrder = 360
0 1 2 3
-80
-60
-40
-20
0
M=360
ω (rad/s)0 0.05 0.1
-80
-60
-40
-20
0
ω1
ω2
ω (rad/s)
Maximum Decimation Frequency
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 3 / 10
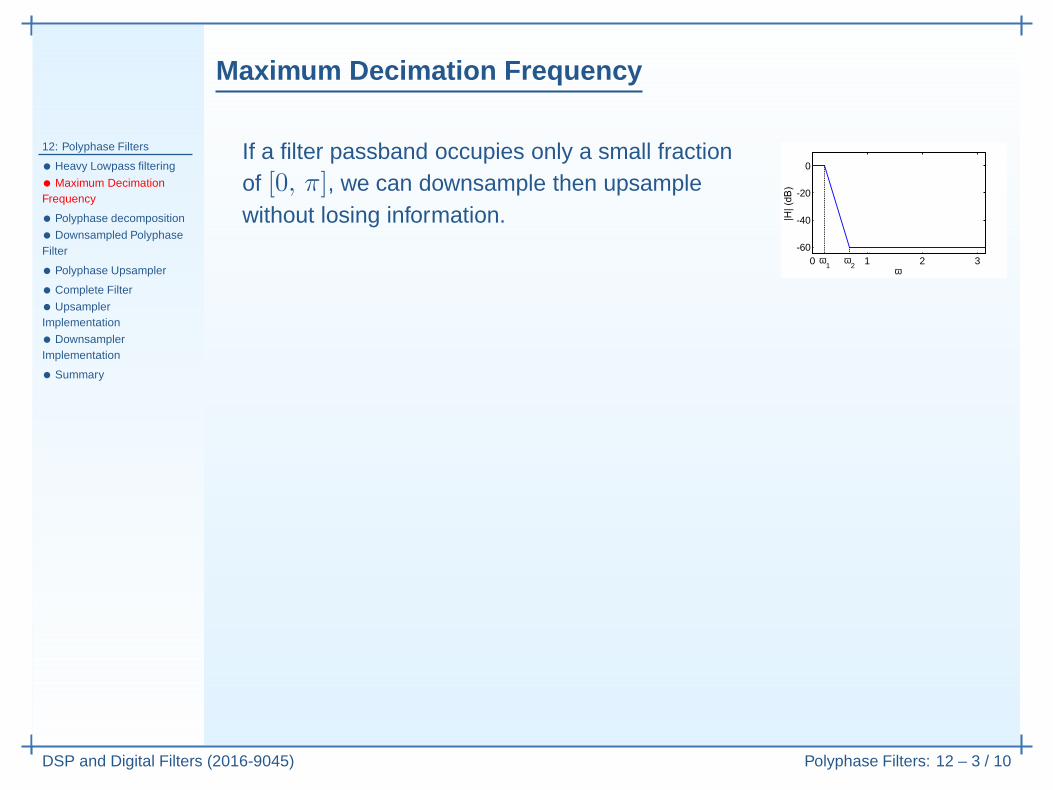
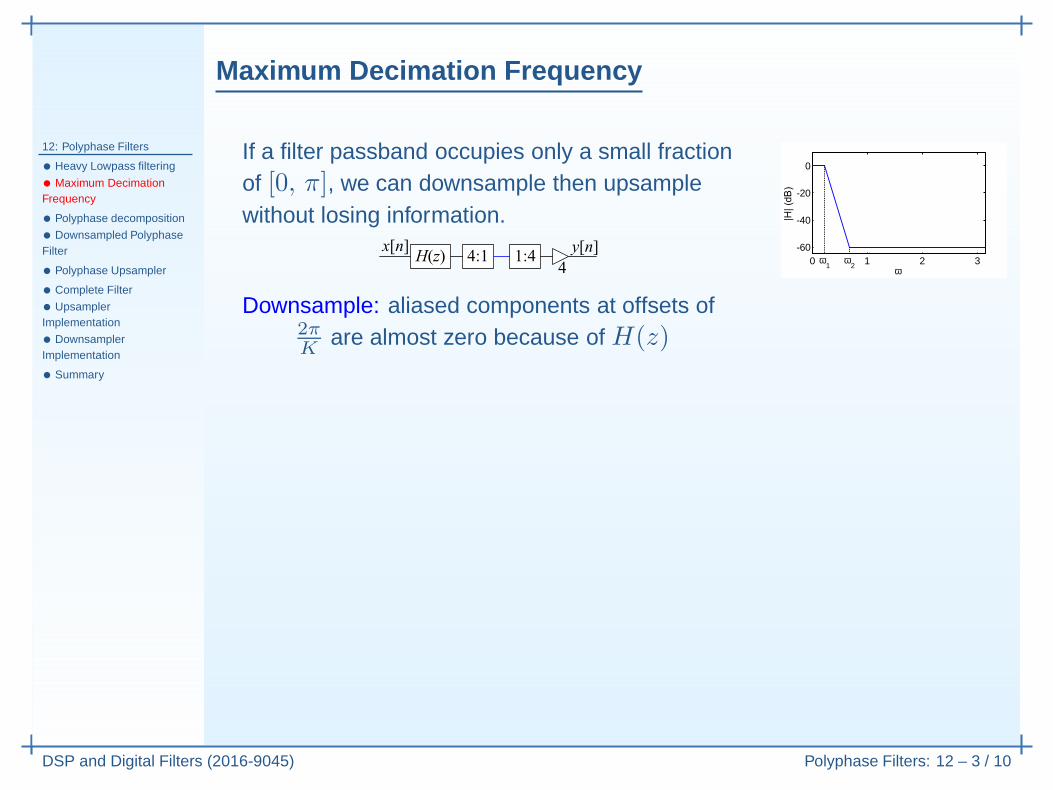
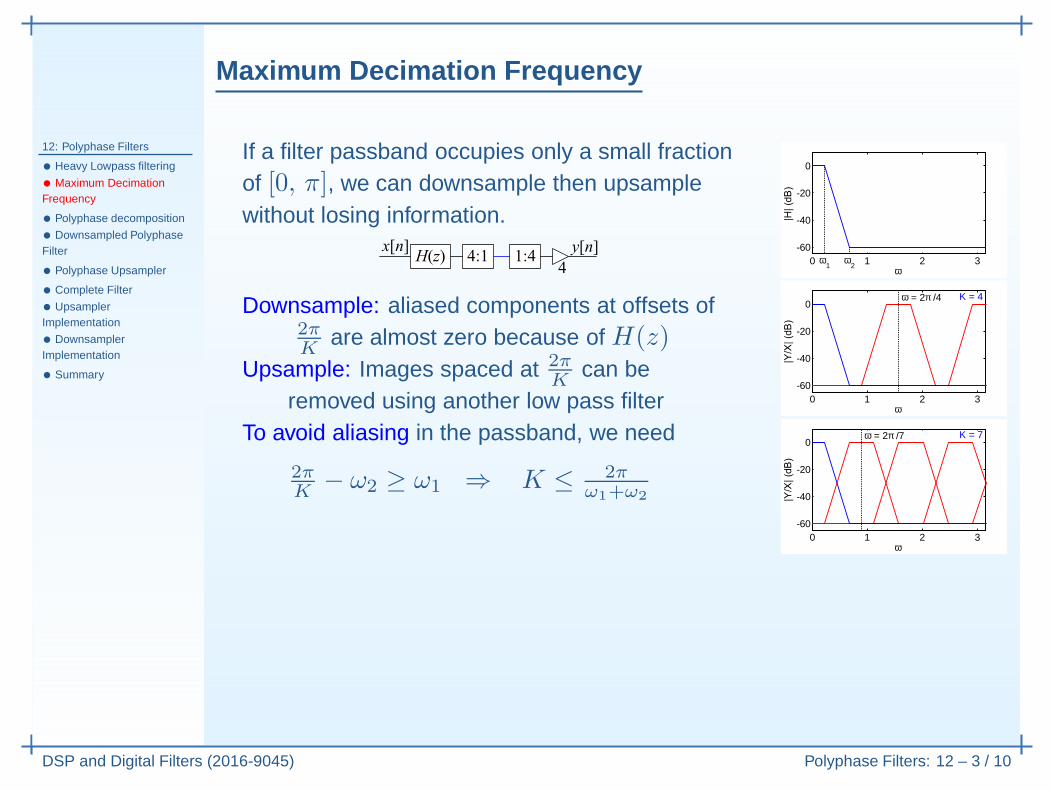
If a filter passband occupies only a small fractionof [0, π], we can downsample then upsamplewithout losing information.
0 1 2 3-60
-40
-20
0
ω1
ω2 ω

Maximum Decimation Frequency
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 3 / 10
If a filter passband occupies only a small fractionof [0, π], we can downsample then upsamplewithout losing information.
0 1 2 3-60
-40
-20
0
ω1
ω2 ω
Maximum Decimation Frequency
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 3 / 10
If a filter passband occupies only a small fractionof [0, π], we can downsample then upsamplewithout losing information.
Downsample: aliased components at offsets of2πK
are almost zero because of H(z)
0 1 2 3-60
-40
-20
0
ω1
ω2 ω

Maximum Decimation Frequency
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 3 / 10
If a filter passband occupies only a small fractionof [0, π], we can downsample then upsamplewithout losing information.
Downsample: aliased components at offsets of2πK
are almost zero because of H(z)Upsample: Images spaced at 2π
Kcan be
removed using another low pass filter
0 1 2 3-60
-40
-20
0
ω1
ω2 ω
0 1 2 3-60
-40
-20
0ω = 2π /4 K = 4
ω
Maximum Decimation Frequency
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 3 / 10
If a filter passband occupies only a small fractionof [0, π], we can downsample then upsamplewithout losing information.
Downsample: aliased components at offsets of2πK
are almost zero because of H(z)Upsample: Images spaced at 2π
Kcan be
removed using another low pass filterTo avoid aliasing in the passband, we need
2πK
− ω2 ≥ ω1 ⇒ K ≤ 2πω1+ω2
0 1 2 3-60
-40
-20
0
ω1
ω2 ω
0 1 2 3-60
-40
-20
0ω = 2π /4 K = 4
ω
0 1 2 3-60
-40
-20
0ω = 2π /7 K = 7
ω

Maximum Decimation Frequency
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 3 / 10
If a filter passband occupies only a small fractionof [0, π], we can downsample then upsamplewithout losing information.
Downsample: aliased components at offsets of2πK
are almost zero because of H(z)Upsample: Images spaced at 2π
Kcan be
removed using another low pass filterTo avoid aliasing in the passband, we need
2πK
− ω2 ≥ ω1 ⇒ K ≤ 2πω1+ω2
0 1 2 3-60
-40
-20
0
ω1
ω2 ω
0 1 2 3-60
-40
-20
0ω = 2π /4 K = 4
ω
0 1 2 3-60
-40
-20
0ω = 2π /7 K = 7
ω
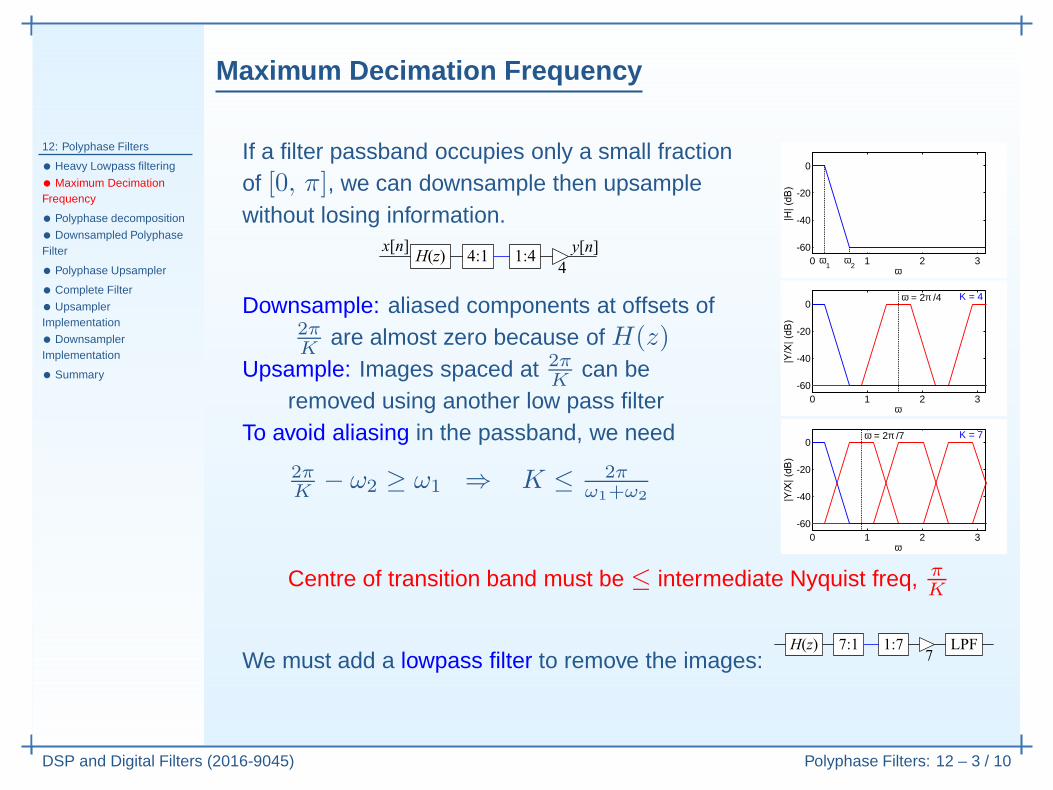
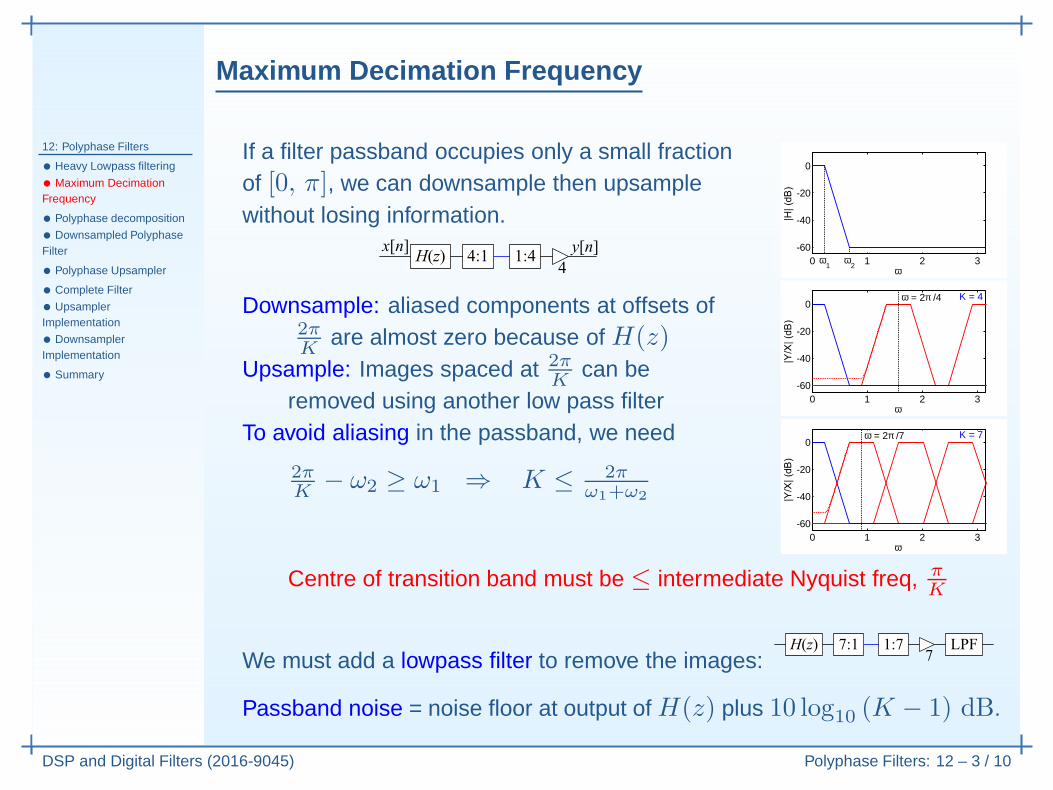
Centre of transition band must be ≤ intermediate Nyquist freq, πK
Maximum Decimation Frequency
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 3 / 10
If a filter passband occupies only a small fractionof [0, π], we can downsample then upsamplewithout losing information.
Downsample: aliased components at offsets of2πK
are almost zero because of H(z)Upsample: Images spaced at 2π
Kcan be
removed using another low pass filterTo avoid aliasing in the passband, we need
2πK
− ω2 ≥ ω1 ⇒ K ≤ 2πω1+ω2
0 1 2 3-60
-40
-20
0
ω1
ω2 ω
0 1 2 3-60
-40
-20
0ω = 2π /4 K = 4
ω
0 1 2 3-60
-40
-20
0ω = 2π /7 K = 7
ω
Centre of transition band must be ≤ intermediate Nyquist freq, πK
We must add a lowpass filter to remove the images:
Maximum Decimation Frequency
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 3 / 10
If a filter passband occupies only a small fractionof [0, π], we can downsample then upsamplewithout losing information.
Downsample: aliased components at offsets of2πK
are almost zero because of H(z)Upsample: Images spaced at 2π
Kcan be
removed using another low pass filterTo avoid aliasing in the passband, we need
2πK
− ω2 ≥ ω1 ⇒ K ≤ 2πω1+ω2
0 1 2 3-60
-40
-20
0
ω1
ω2 ω
0 1 2 3-60
-40
-20
0ω = 2π /4 K = 4
ω
0 1 2 3-60
-40
-20
0ω = 2π /7 K = 7
ω
Centre of transition band must be ≤ intermediate Nyquist freq, πK
We must add a lowpass filter to remove the images:
Passband noise = noise floor at output of H(z) plus 10 log10 (K − 1) dB.
Polyphase decomposition
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 4 / 10
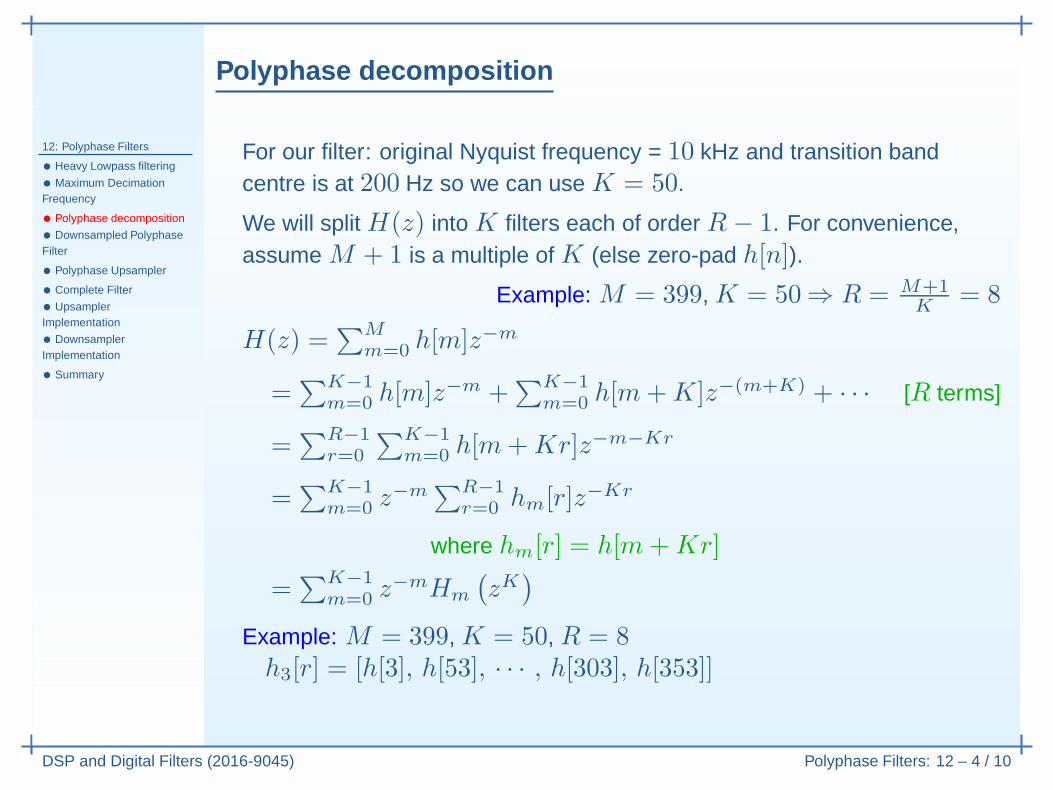
For our filter: original Nyquist frequency = 10 kHz and transition bandcentre is at 200 Hz so we can use K = 50.

Polyphase decomposition
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 4 / 10
For our filter: original Nyquist frequency = 10 kHz and transition bandcentre is at 200 Hz so we can use K = 50.
We will split H(z) into K filters each of order R − 1.

Polyphase decomposition
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 4 / 10
For our filter: original Nyquist frequency = 10 kHz and transition bandcentre is at 200 Hz so we can use K = 50.
We will split H(z) into K filters each of order R − 1. For convenience,assume M + 1 is a multiple of K (else zero-pad h[n]).
Polyphase decomposition
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 4 / 10
For our filter: original Nyquist frequency = 10 kHz and transition bandcentre is at 200 Hz so we can use K = 50.
We will split H(z) into K filters each of order R − 1. For convenience,assume M + 1 is a multiple of K (else zero-pad h[n]).
Example: M = 399, K = 50
Polyphase decomposition
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 4 / 10
For our filter: original Nyquist frequency = 10 kHz and transition bandcentre is at 200 Hz so we can use K = 50.
We will split H(z) into K filters each of order R − 1. For convenience,assume M + 1 is a multiple of K (else zero-pad h[n]).
Example: M = 399, K = 50⇒ R = M+1K
= 8
Polyphase decomposition
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 4 / 10
For our filter: original Nyquist frequency = 10 kHz and transition bandcentre is at 200 Hz so we can use K = 50.
We will split H(z) into K filters each of order R − 1. For convenience,assume M + 1 is a multiple of K (else zero-pad h[n]).
Example: M = 399, K = 50⇒ R = M+1K
= 8
H(z) =∑M
m=0 h[m]z−m

Polyphase decomposition
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 4 / 10
For our filter: original Nyquist frequency = 10 kHz and transition bandcentre is at 200 Hz so we can use K = 50.
We will split H(z) into K filters each of order R − 1. For convenience,assume M + 1 is a multiple of K (else zero-pad h[n]).
Example: M = 399, K = 50⇒ R = M+1K
= 8
H(z) =∑M
m=0 h[m]z−m
=∑K−1
m=0 h[m]z−m +∑K−1
m=0 h[m+K]z−(m+K) + · · · [R terms]
Polyphase decomposition
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 4 / 10
For our filter: original Nyquist frequency = 10 kHz and transition bandcentre is at 200 Hz so we can use K = 50.
We will split H(z) into K filters each of order R − 1. For convenience,assume M + 1 is a multiple of K (else zero-pad h[n]).
Example: M = 399, K = 50⇒ R = M+1K
= 8
H(z) =∑M
m=0 h[m]z−m
=∑K−1
m=0 h[m]z−m +∑K−1
m=0 h[m+K]z−(m+K) + · · · [R terms]
=∑R−1
r=0
∑K−1m=0 h[m+Kr]z−m−Kr

Polyphase decomposition
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 4 / 10
For our filter: original Nyquist frequency = 10 kHz and transition bandcentre is at 200 Hz so we can use K = 50.
We will split H(z) into K filters each of order R − 1. For convenience,assume M + 1 is a multiple of K (else zero-pad h[n]).
Example: M = 399, K = 50⇒ R = M+1K
= 8
H(z) =∑M
m=0 h[m]z−m
=∑K−1
m=0 h[m]z−m +∑K−1
m=0 h[m+K]z−(m+K) + · · · [R terms]
=∑R−1
r=0
∑K−1m=0 h[m+Kr]z−m−Kr
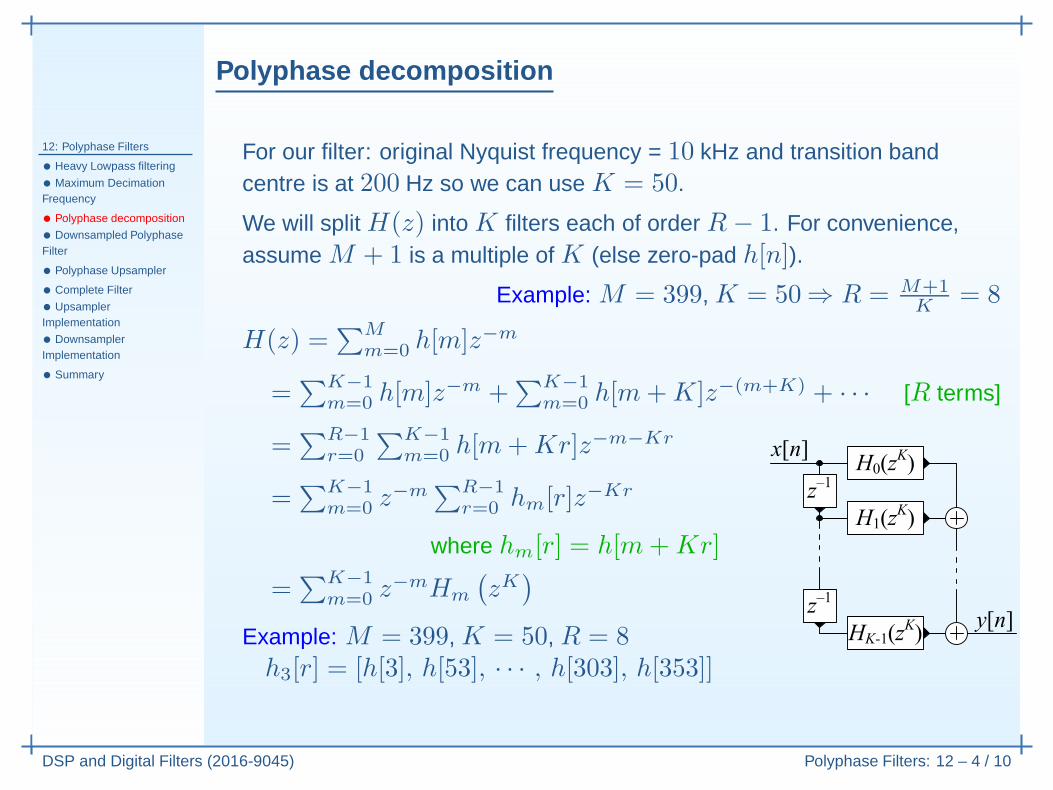
=∑K−1
m=0 z−m
∑R−1r=0 hm[r]z−Kr
where hm[r] = h[m+Kr]
=∑K−1
m=0 z−mHm
(
zK)
Polyphase decomposition
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 4 / 10
For our filter: original Nyquist frequency = 10 kHz and transition bandcentre is at 200 Hz so we can use K = 50.
We will split H(z) into K filters each of order R − 1. For convenience,assume M + 1 is a multiple of K (else zero-pad h[n]).
Example: M = 399, K = 50⇒ R = M+1K
= 8
H(z) =∑M
m=0 h[m]z−m
=∑K−1
m=0 h[m]z−m +∑K−1
m=0 h[m+K]z−(m+K) + · · · [R terms]
=∑R−1
r=0
∑K−1m=0 h[m+Kr]z−m−Kr
=∑K−1
m=0 z−m
∑R−1r=0 hm[r]z−Kr
where hm[r] = h[m+Kr]
=∑K−1
m=0 z−mHm
(
zK)
Example: M = 399, K = 50, R = 8h3[r] = [h[3], h[53], · · · , h[303], h[353]]
Polyphase decomposition
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 4 / 10
For our filter: original Nyquist frequency = 10 kHz and transition bandcentre is at 200 Hz so we can use K = 50.
We will split H(z) into K filters each of order R − 1. For convenience,assume M + 1 is a multiple of K (else zero-pad h[n]).
Example: M = 399, K = 50⇒ R = M+1K
= 8
H(z) =∑M
m=0 h[m]z−m
=∑K−1
m=0 h[m]z−m +∑K−1
m=0 h[m+K]z−(m+K) + · · · [R terms]
=∑R−1
r=0
∑K−1m=0 h[m+Kr]z−m−Kr
=∑K−1
m=0 z−m
∑R−1r=0 hm[r]z−Kr
where hm[r] = h[m+Kr]
=∑K−1
m=0 z−mHm
(
zK)
Example: M = 399, K = 50, R = 8h3[r] = [h[3], h[53], · · · , h[303], h[353]]

Polyphase decomposition
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 4 / 10
For our filter: original Nyquist frequency = 10 kHz and transition bandcentre is at 200 Hz so we can use K = 50.
We will split H(z) into K filters each of order R − 1. For convenience,assume M + 1 is a multiple of K (else zero-pad h[n]).
Example: M = 399, K = 50⇒ R = M+1K
= 8
H(z) =∑M
m=0 h[m]z−m
=∑K−1
m=0 h[m]z−m +∑K−1
m=0 h[m+K]z−(m+K) + · · · [R terms]
=∑R−1
r=0
∑K−1m=0 h[m+Kr]z−m−Kr
=∑K−1
m=0 z−m
∑R−1r=0 hm[r]z−Kr
where hm[r] = h[m+Kr]
=∑K−1
m=0 z−mHm
(
zK)
Example: M = 399, K = 50, R = 8h3[r] = [h[3], h[53], · · · , h[303], h[353]]
This is a polyphase implementation of the filter H(z)
Downsampled Polyphase Filter
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 5 / 10
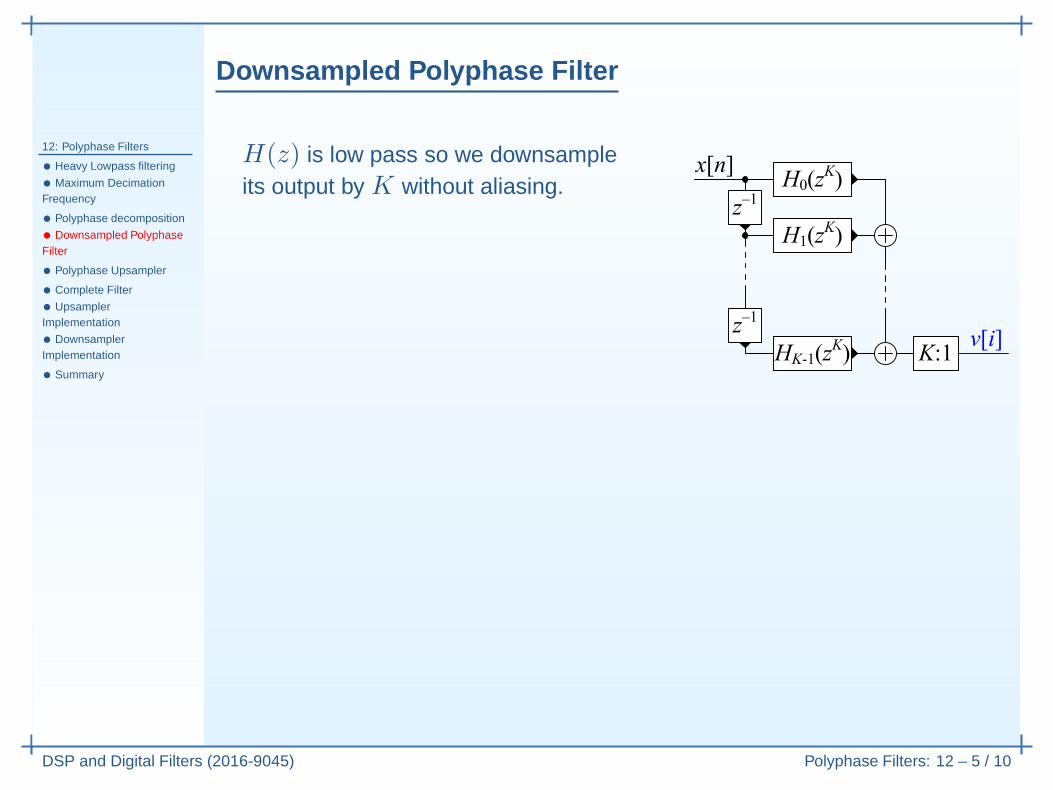
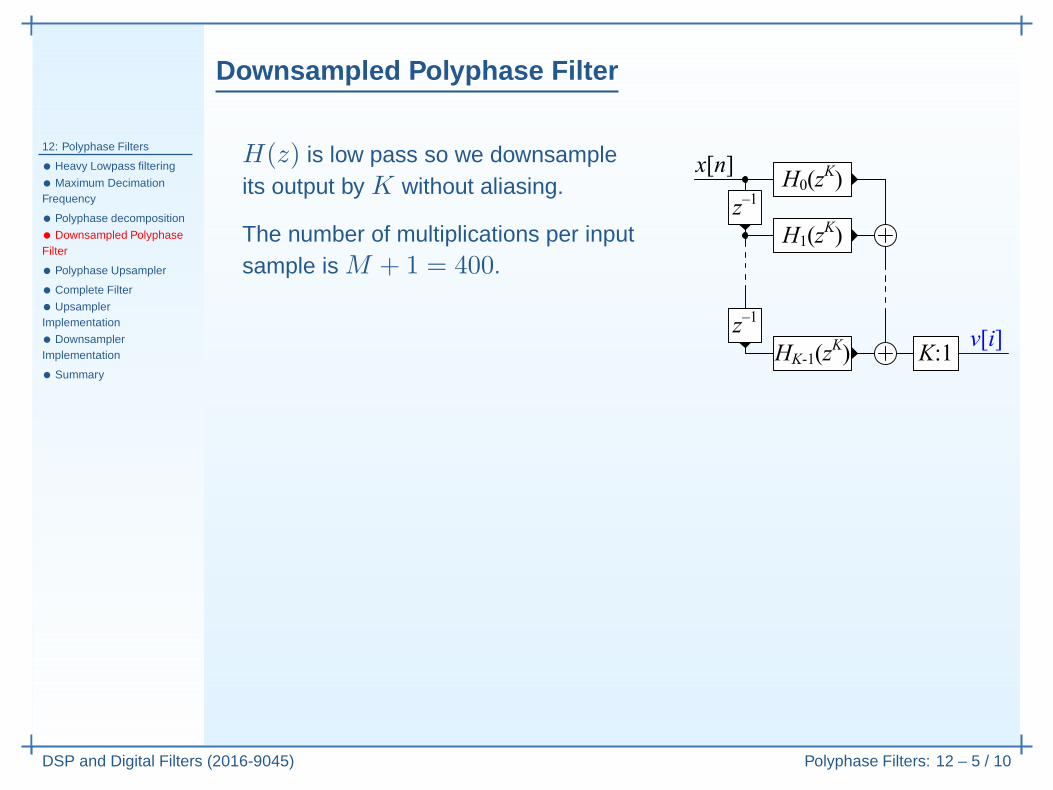
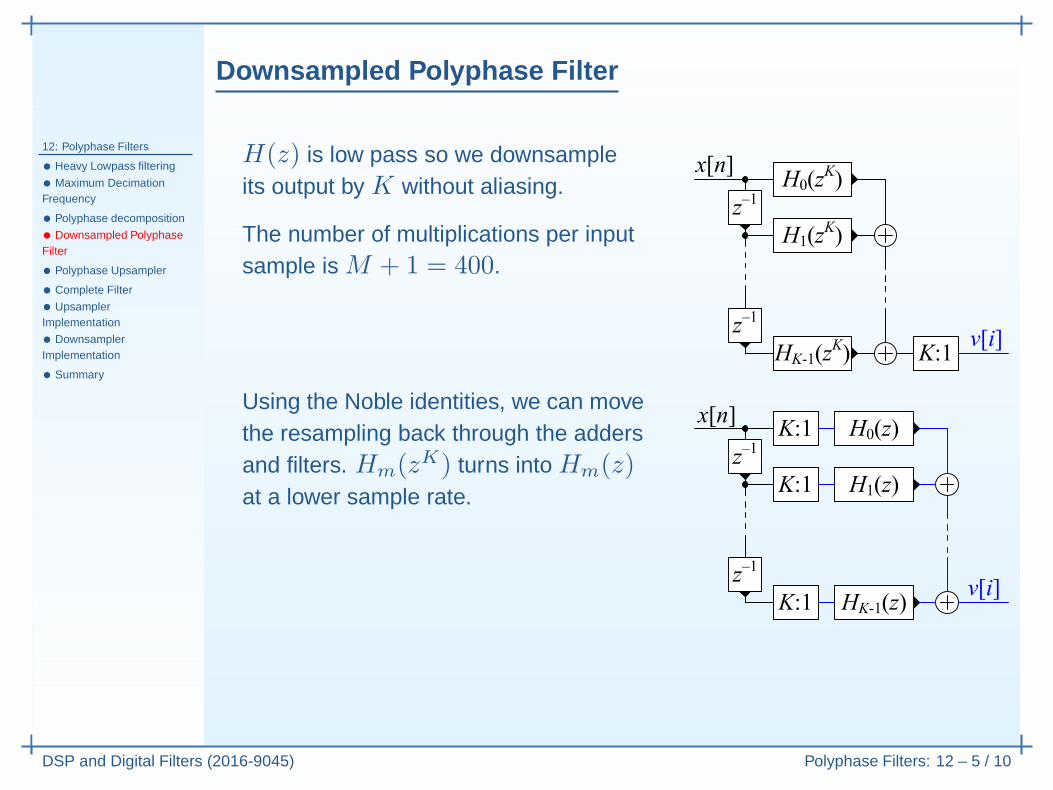
H(z) is low pass so we downsampleits output by K without aliasing.
Downsampled Polyphase Filter
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 5 / 10
H(z) is low pass so we downsampleits output by K without aliasing.
The number of multiplications per inputsample is M + 1 = 400.
Downsampled Polyphase Filter
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 5 / 10
H(z) is low pass so we downsampleits output by K without aliasing.
The number of multiplications per inputsample is M + 1 = 400.
Using the Noble identities, we can movethe resampling back through the addersand filters. Hm(zK) turns into Hm(z)at a lower sample rate.

Downsampled Polyphase Filter
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 5 / 10
H(z) is low pass so we downsampleits output by K without aliasing.
The number of multiplications per inputsample is M + 1 = 400.
Using the Noble identities, we can movethe resampling back through the addersand filters. Hm(zK) turns into Hm(z)at a lower sample rate.
We still perform 400 multiplications butnow only once for every K inputsamples.

Downsampled Polyphase Filter
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 5 / 10
H(z) is low pass so we downsampleits output by K without aliasing.
The number of multiplications per inputsample is M + 1 = 400.
Using the Noble identities, we can movethe resampling back through the addersand filters. Hm(zK) turns into Hm(z)at a lower sample rate.
We still perform 400 multiplications butnow only once for every K inputsamples.
Multiplications per input sample = 8 (down by a factor of 50 ,) but v[n] hasthe wrong sample rate (/).
Polyphase Upsampler
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 6 / 10
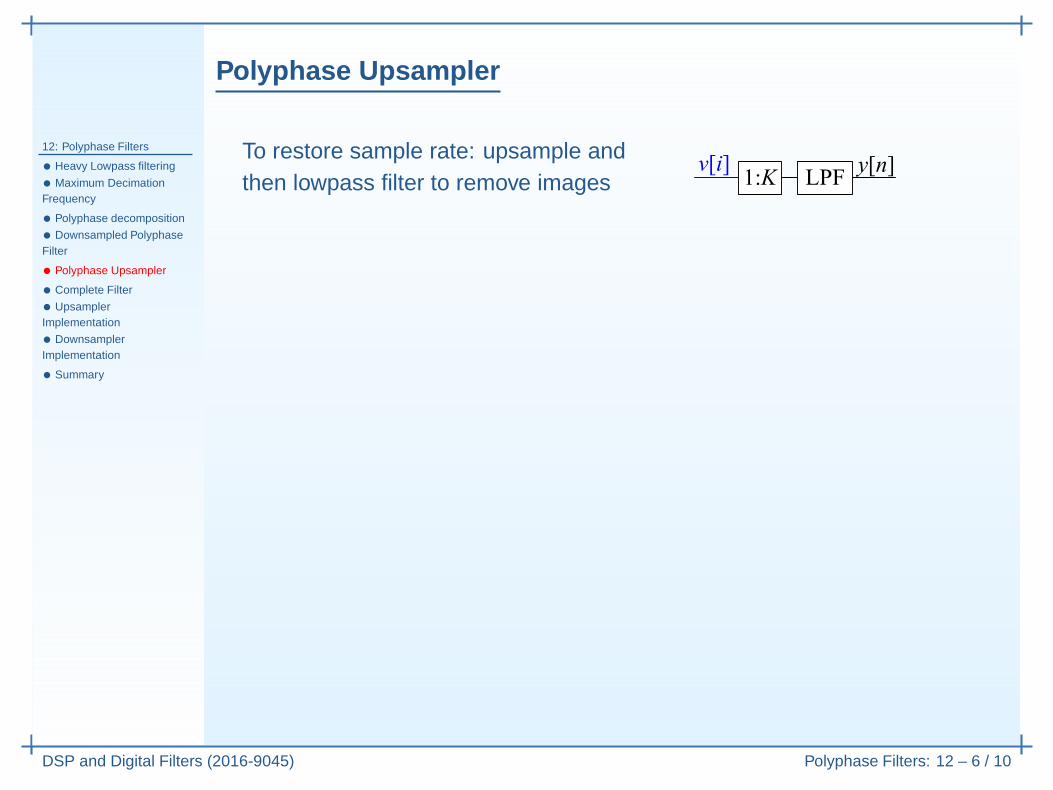
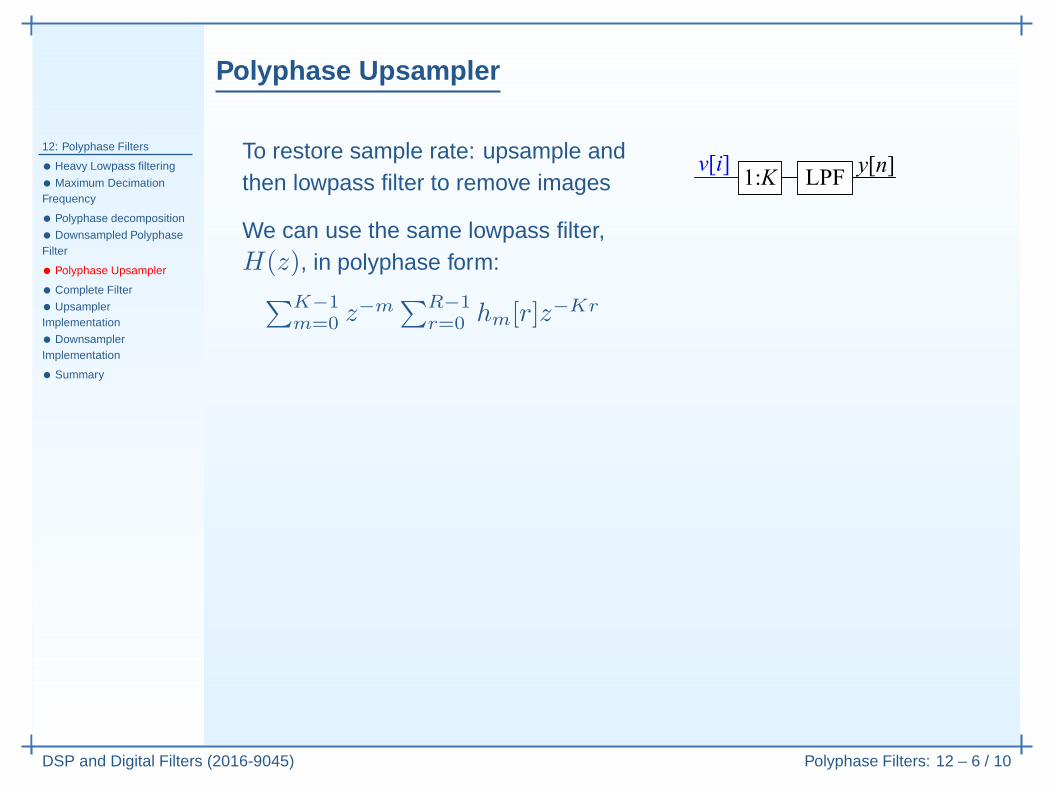
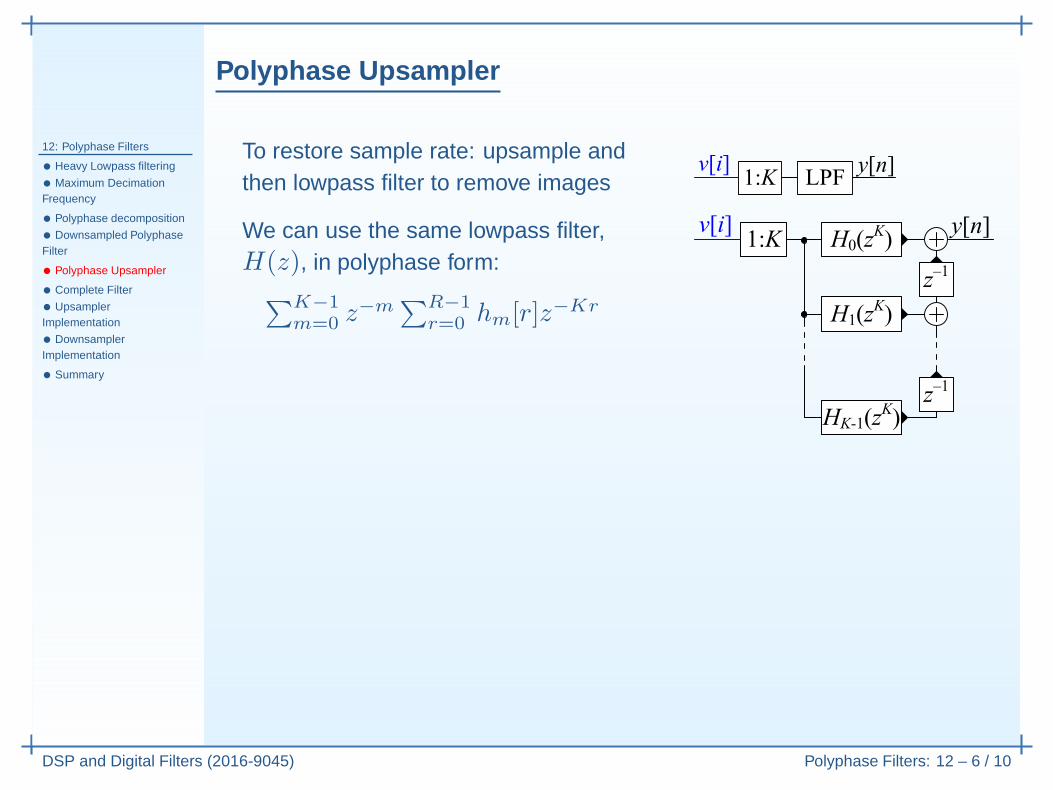
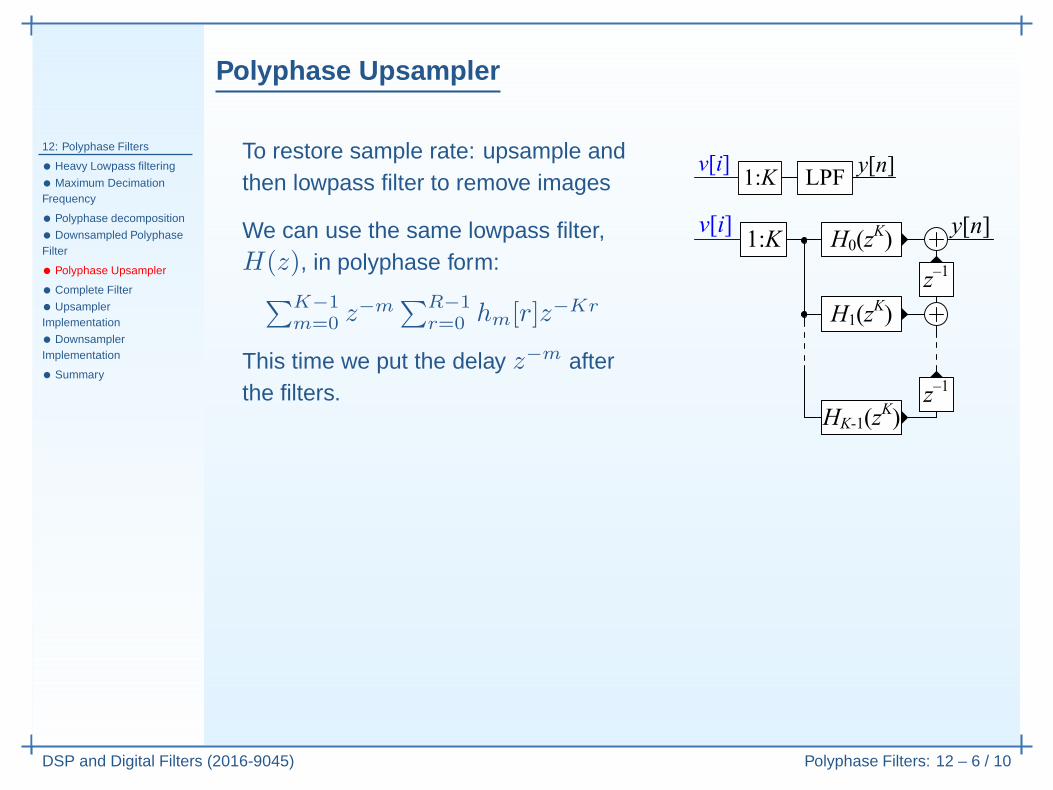
To restore sample rate: upsample andthen lowpass filter to remove images
Polyphase Upsampler
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 6 / 10
To restore sample rate: upsample andthen lowpass filter to remove images
We can use the same lowpass filter,H(z), in polyphase form:∑K−1
m=0 z−m
∑R−1r=0 hm[r]z−Kr
Polyphase Upsampler
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 6 / 10
To restore sample rate: upsample andthen lowpass filter to remove images
We can use the same lowpass filter,H(z), in polyphase form:∑K−1
m=0 z−m
∑R−1r=0 hm[r]z−Kr
Polyphase Upsampler
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 6 / 10
To restore sample rate: upsample andthen lowpass filter to remove images
We can use the same lowpass filter,H(z), in polyphase form:∑K−1
m=0 z−m
∑R−1r=0 hm[r]z−Kr
This time we put the delay z−m afterthe filters.

Polyphase Upsampler
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 6 / 10
To restore sample rate: upsample andthen lowpass filter to remove images
We can use the same lowpass filter,H(z), in polyphase form:∑K−1
m=0 z−m
∑R−1r=0 hm[r]z−Kr
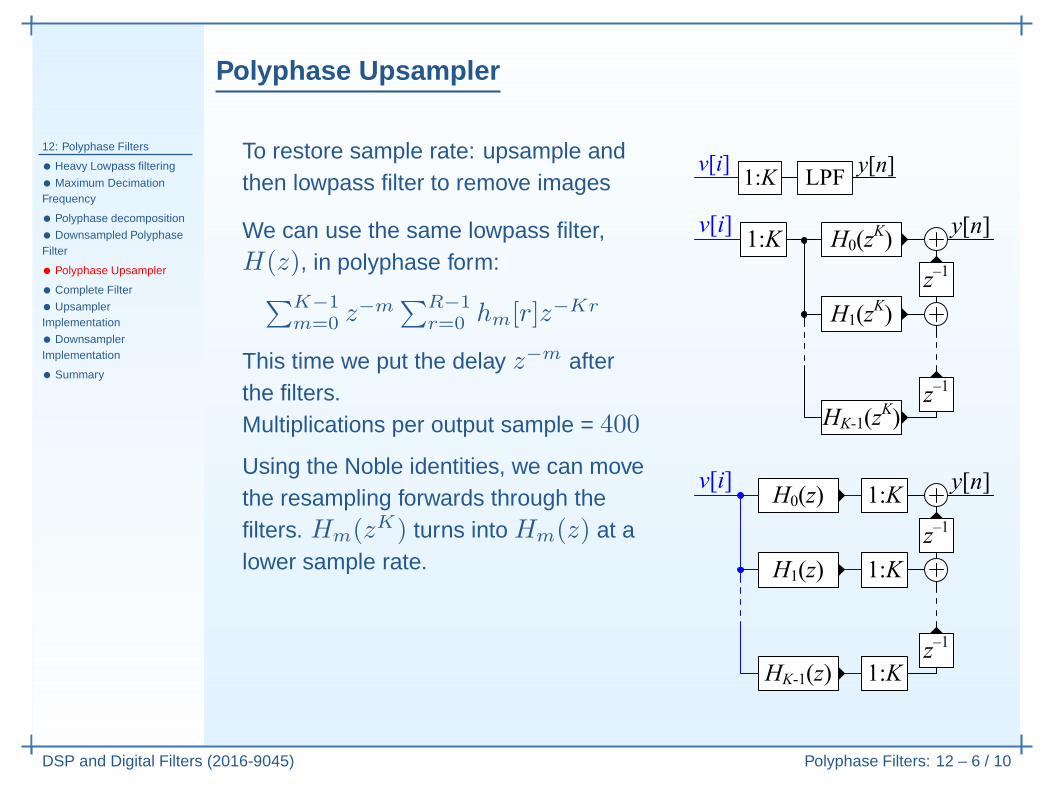
This time we put the delay z−m afterthe filters.Multiplications per output sample = 400
Polyphase Upsampler
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 6 / 10
To restore sample rate: upsample andthen lowpass filter to remove images
We can use the same lowpass filter,H(z), in polyphase form:∑K−1
m=0 z−m
∑R−1r=0 hm[r]z−Kr
This time we put the delay z−m afterthe filters.Multiplications per output sample = 400
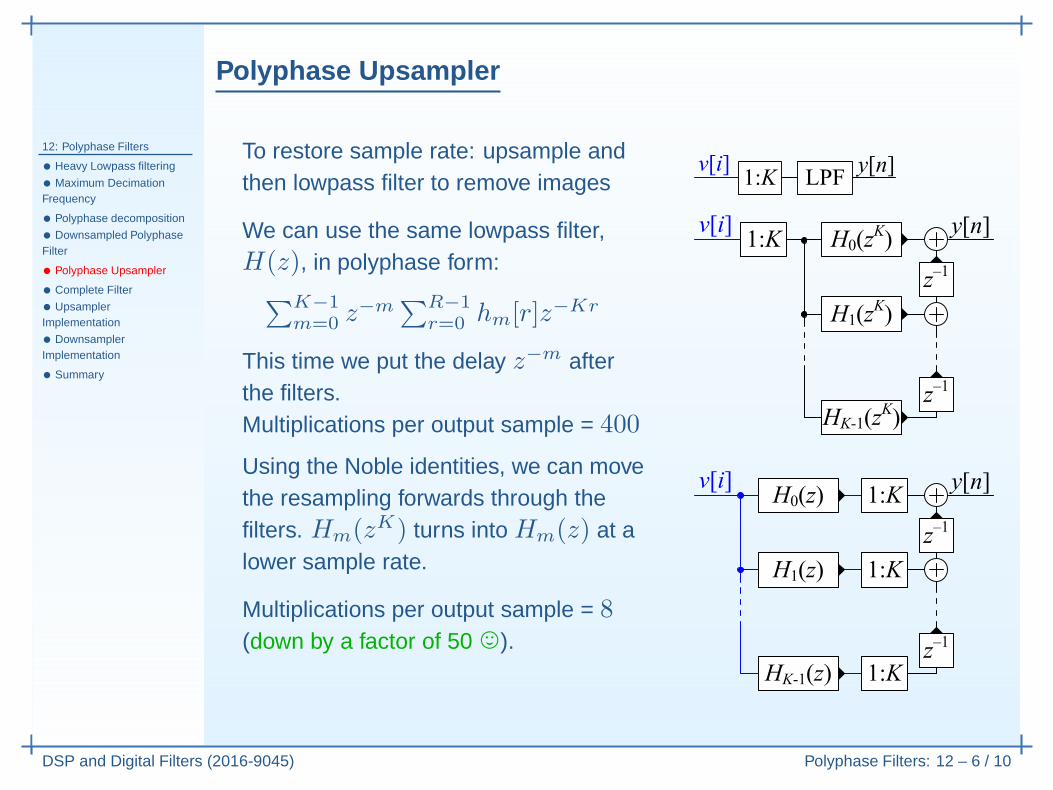
Using the Noble identities, we can movethe resampling forwards through thefilters. Hm(zK) turns into Hm(z) at alower sample rate.
Polyphase Upsampler
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 6 / 10
To restore sample rate: upsample andthen lowpass filter to remove images
We can use the same lowpass filter,H(z), in polyphase form:∑K−1
m=0 z−m
∑R−1r=0 hm[r]z−Kr
This time we put the delay z−m afterthe filters.Multiplications per output sample = 400
Using the Noble identities, we can movethe resampling forwards through thefilters. Hm(zK) turns into Hm(z) at alower sample rate.
Multiplications per output sample = 8(down by a factor of 50 ,).
Complete Filter
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 7 / 10
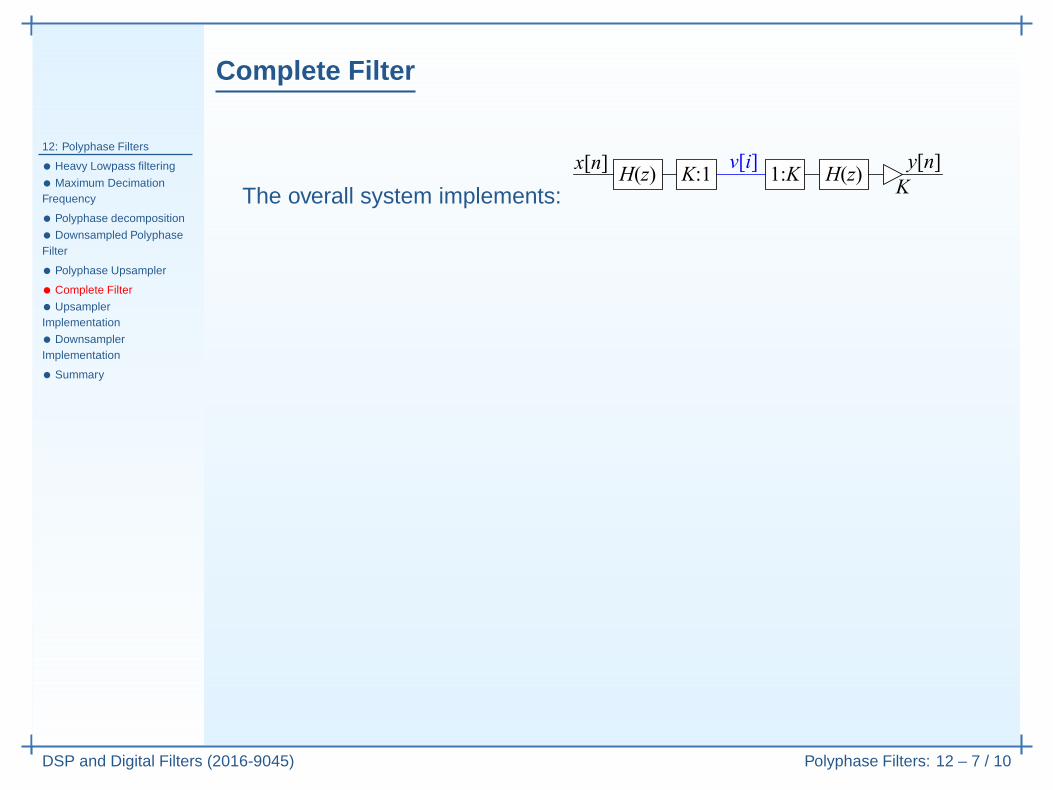
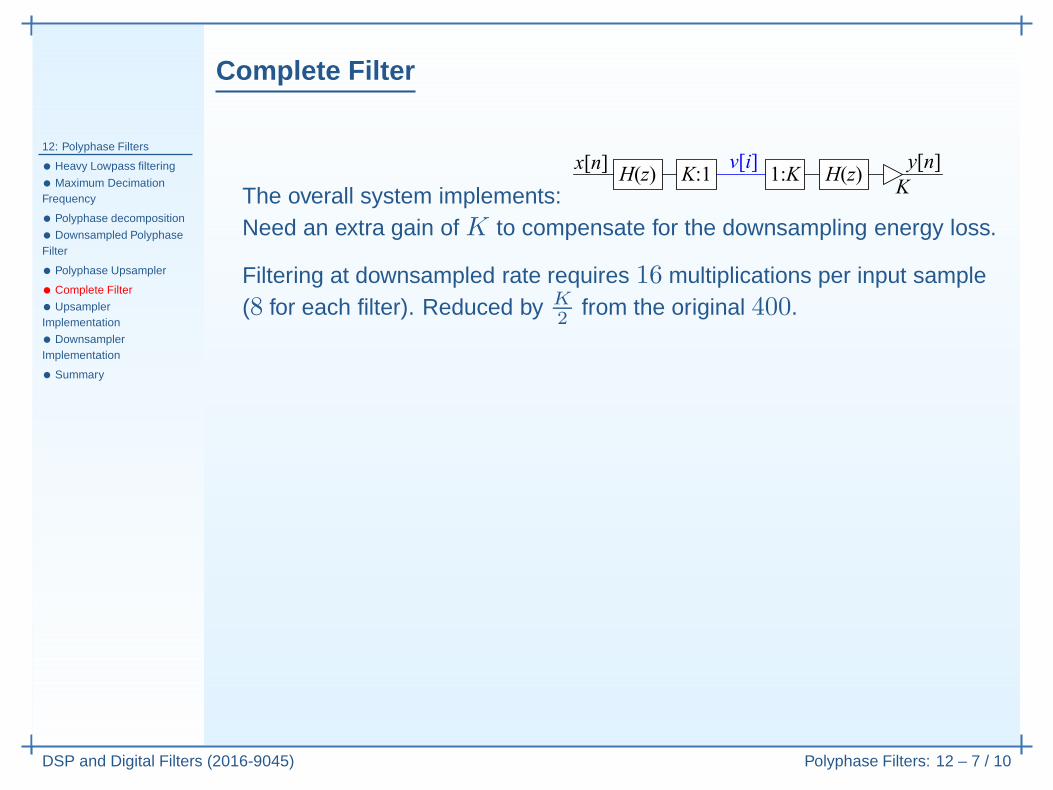
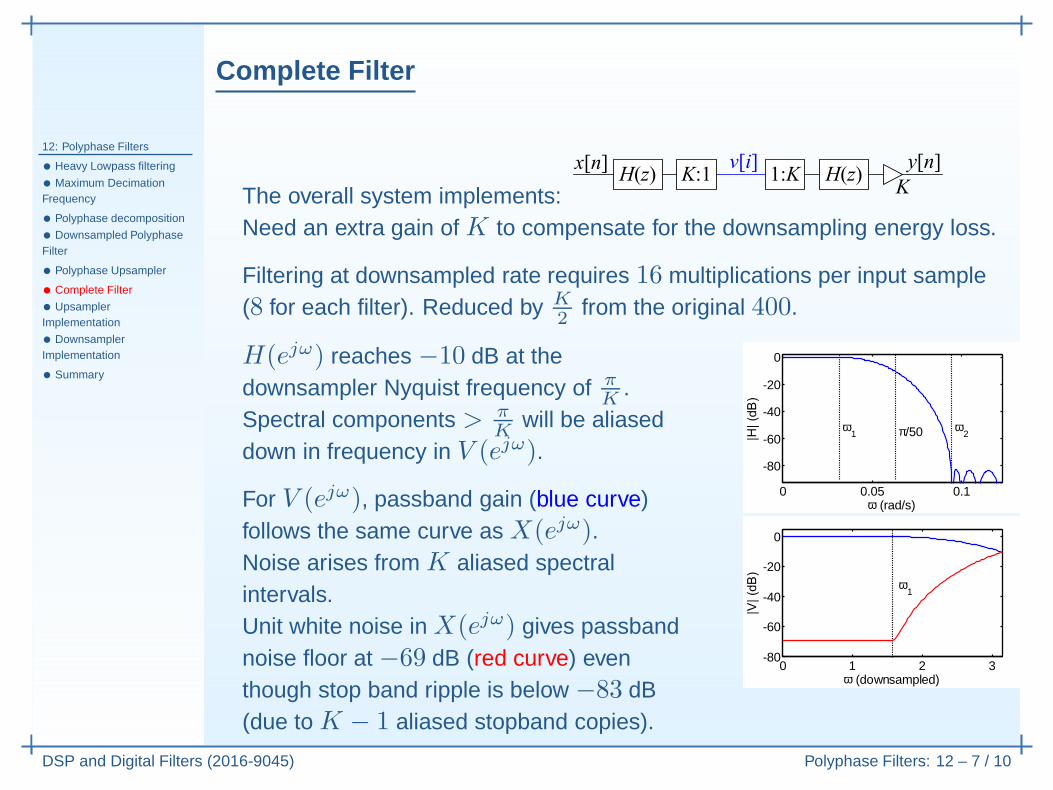
The overall system implements:

Complete Filter
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 7 / 10
The overall system implements:Need an extra gain of K to compensate for the downsampling energy loss.
Complete Filter
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 7 / 10
The overall system implements:Need an extra gain of K to compensate for the downsampling energy loss.
Filtering at downsampled rate requires 16 multiplications per input sample(8 for each filter). Reduced by K
2 from the original 400.
Complete Filter
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 7 / 10
The overall system implements:Need an extra gain of K to compensate for the downsampling energy loss.
Filtering at downsampled rate requires 16 multiplications per input sample(8 for each filter). Reduced by K
2 from the original 400.
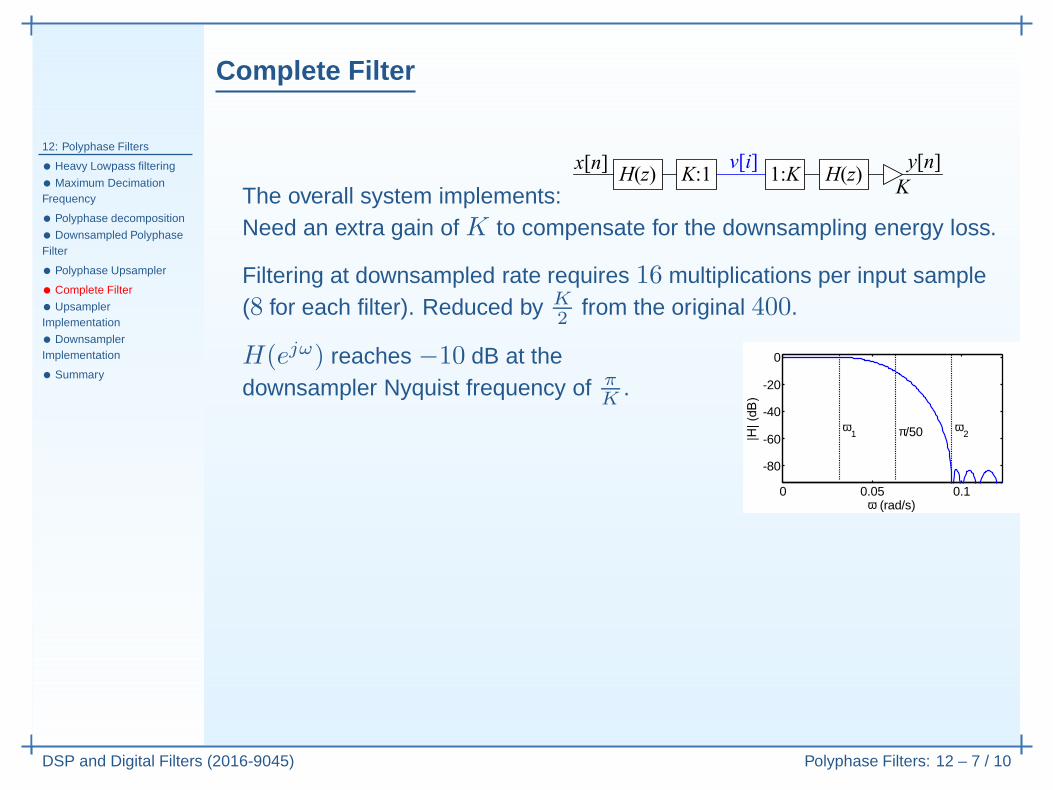
H(ejω) reaches −10 dB at thedownsampler Nyquist frequency of π
K.
0 0.05 0.1
-80
-60
-40
-20
0
ω1
ω2π/50
ω (rad/s)

Complete Filter
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 7 / 10
The overall system implements:Need an extra gain of K to compensate for the downsampling energy loss.
Filtering at downsampled rate requires 16 multiplications per input sample(8 for each filter). Reduced by K
2 from the original 400.
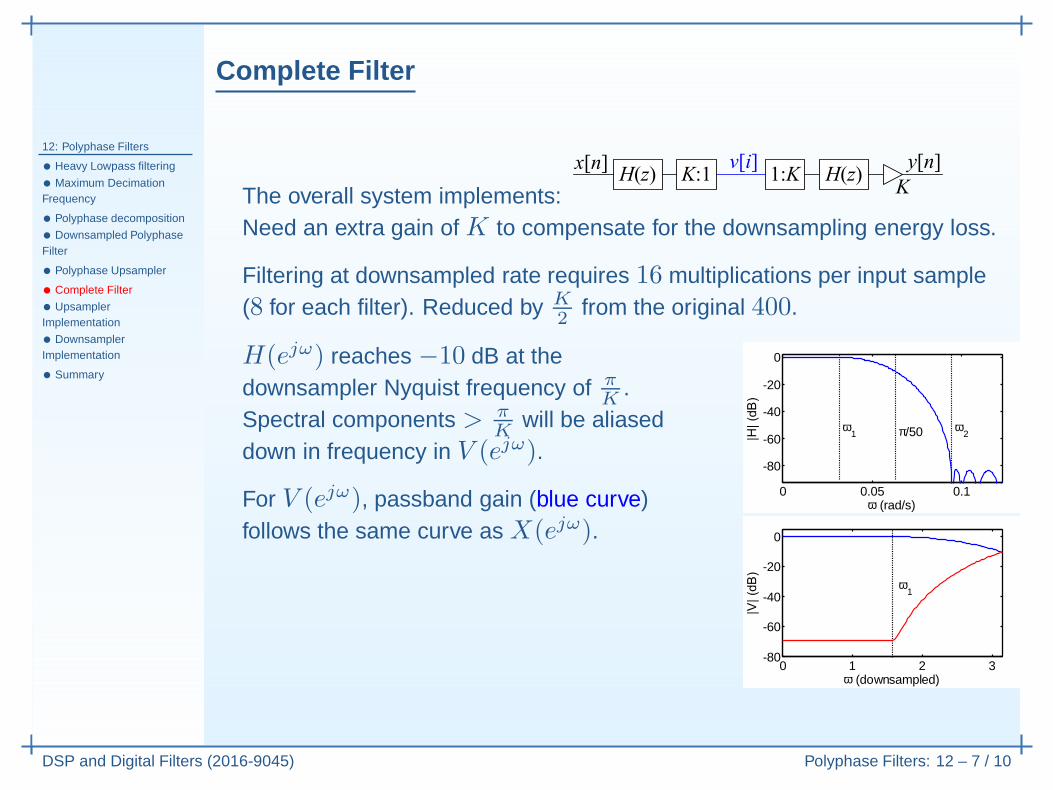
H(ejω) reaches −10 dB at thedownsampler Nyquist frequency of π
K.
Spectral components > πK
will be aliaseddown in frequency in V (ejω).
0 0.05 0.1
-80
-60
-40
-20
0
ω1
ω2π/50
ω (rad/s)
Complete Filter
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 7 / 10
The overall system implements:Need an extra gain of K to compensate for the downsampling energy loss.
Filtering at downsampled rate requires 16 multiplications per input sample(8 for each filter). Reduced by K
2 from the original 400.
H(ejω) reaches −10 dB at thedownsampler Nyquist frequency of π
K.
Spectral components > πK
will be aliaseddown in frequency in V (ejω).
For V (ejω), passband gain (blue curve)follows the same curve as X(ejω).
0 0.05 0.1
-80
-60
-40
-20
0
ω1
ω2π/50
ω (rad/s)
0 1 2 3-80
-60
-40
-20
0
ω1
ω (downsampled)
Complete Filter
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 7 / 10
The overall system implements:Need an extra gain of K to compensate for the downsampling energy loss.
Filtering at downsampled rate requires 16 multiplications per input sample(8 for each filter). Reduced by K
2 from the original 400.
H(ejω) reaches −10 dB at thedownsampler Nyquist frequency of π
K.
Spectral components > πK
will be aliaseddown in frequency in V (ejω).
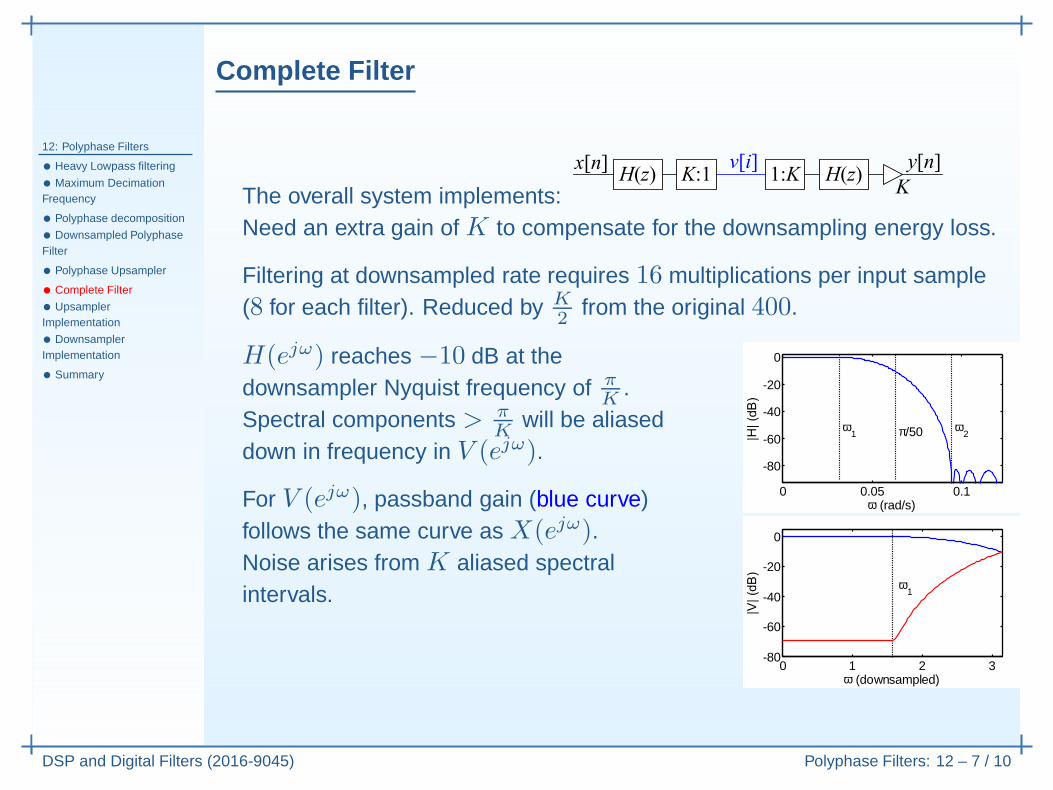
For V (ejω), passband gain (blue curve)follows the same curve as X(ejω).Noise arises from K aliased spectralintervals.
0 0.05 0.1
-80
-60
-40
-20
0
ω1
ω2π/50
ω (rad/s)
0 1 2 3-80
-60
-40
-20
0
ω1
ω (downsampled)
Complete Filter
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 7 / 10
The overall system implements:Need an extra gain of K to compensate for the downsampling energy loss.
Filtering at downsampled rate requires 16 multiplications per input sample(8 for each filter). Reduced by K
2 from the original 400.
H(ejω) reaches −10 dB at thedownsampler Nyquist frequency of π
K.
Spectral components > πK
will be aliaseddown in frequency in V (ejω).
For V (ejω), passband gain (blue curve)follows the same curve as X(ejω).Noise arises from K aliased spectralintervals.Unit white noise in X(ejω) gives passbandnoise floor at −69 dB (red curve) eventhough stop band ripple is below −83 dB(due to K − 1 aliased stopband copies).
0 0.05 0.1
-80
-60
-40
-20
0
ω1
ω2π/50
ω (rad/s)
0 1 2 3-80
-60
-40
-20
0
ω1
ω (downsampled)
Upsampler Implementation
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 8 / 10
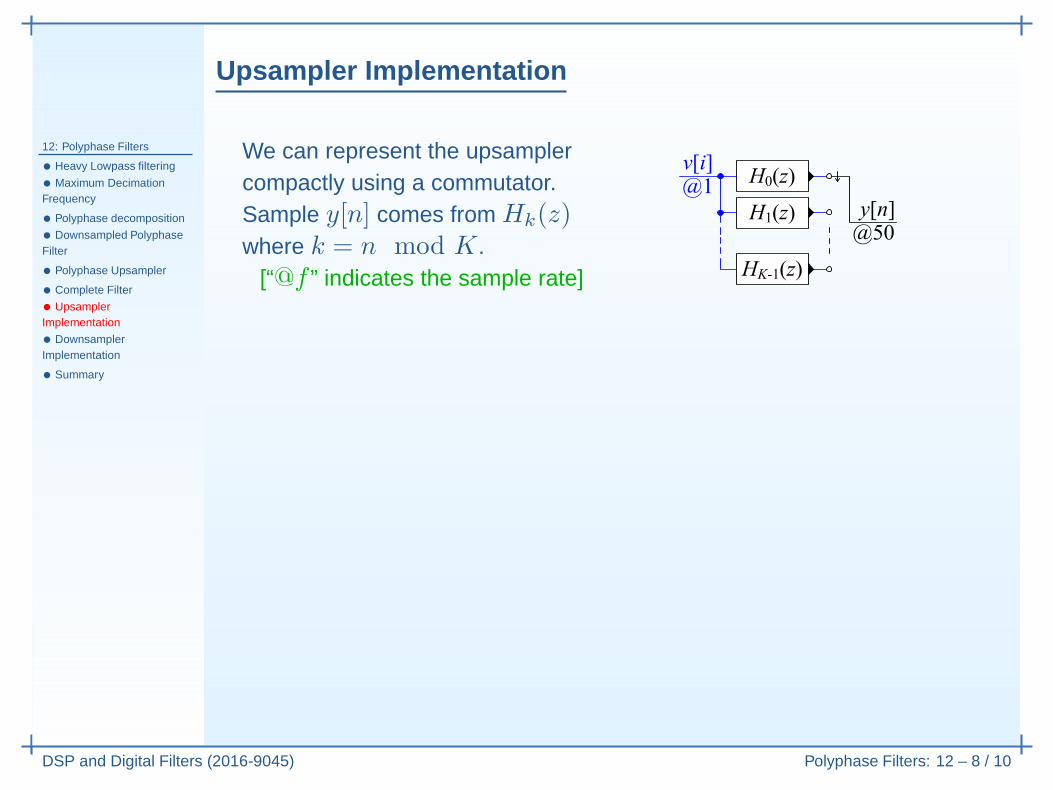
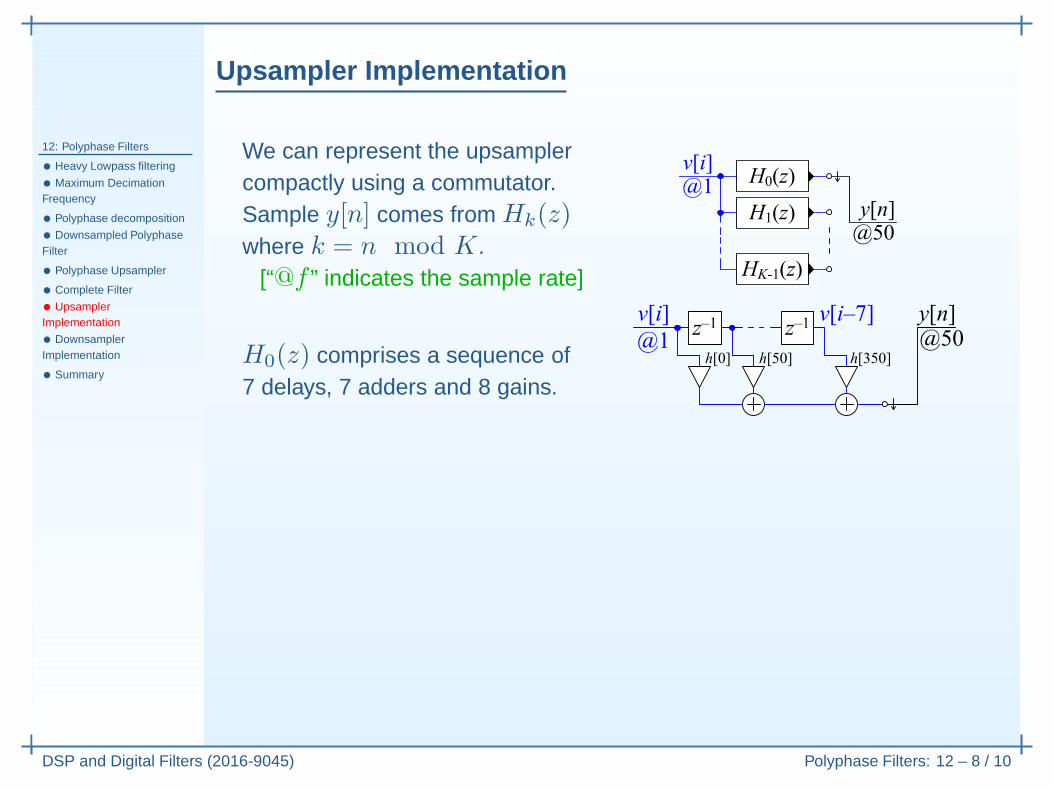
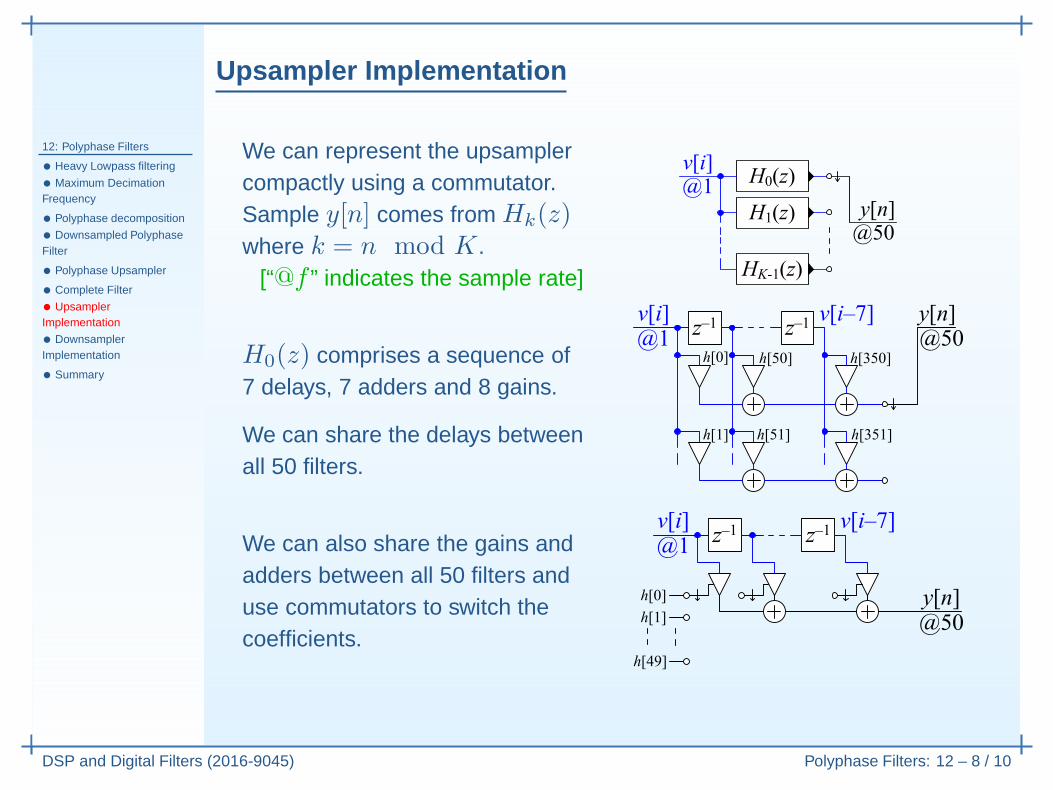
We can represent the upsamplercompactly using a commutator.Sample y[n] comes from Hk(z)where k = n mod K .
[“@f ” indicates the sample rate]
Upsampler Implementation
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 8 / 10
We can represent the upsamplercompactly using a commutator.Sample y[n] comes from Hk(z)where k = n mod K .
[“@f ” indicates the sample rate]
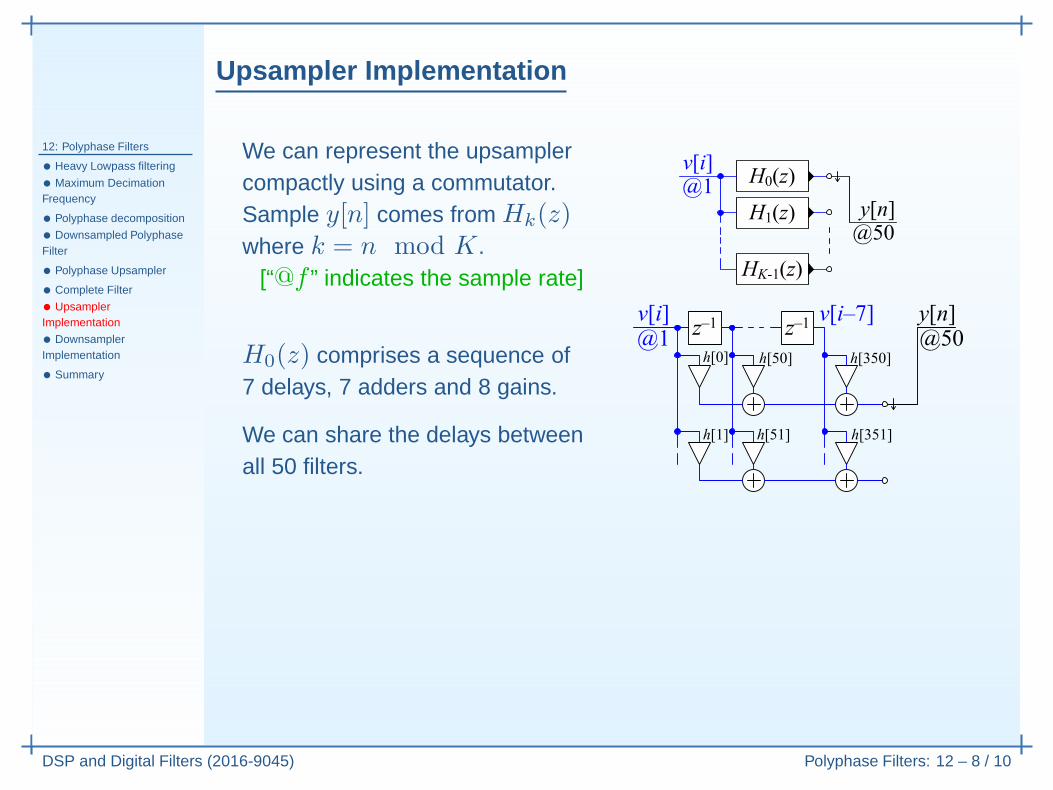
H0(z) comprises a sequence of7 delays, 7 adders and 8 gains.
Upsampler Implementation
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 8 / 10
We can represent the upsamplercompactly using a commutator.Sample y[n] comes from Hk(z)where k = n mod K .
[“@f ” indicates the sample rate]
H0(z) comprises a sequence of7 delays, 7 adders and 8 gains.
We can share the delays betweenall 50 filters.
Upsampler Implementation
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 8 / 10
We can represent the upsamplercompactly using a commutator.Sample y[n] comes from Hk(z)where k = n mod K .
[“@f ” indicates the sample rate]
H0(z) comprises a sequence of7 delays, 7 adders and 8 gains.
We can share the delays betweenall 50 filters.
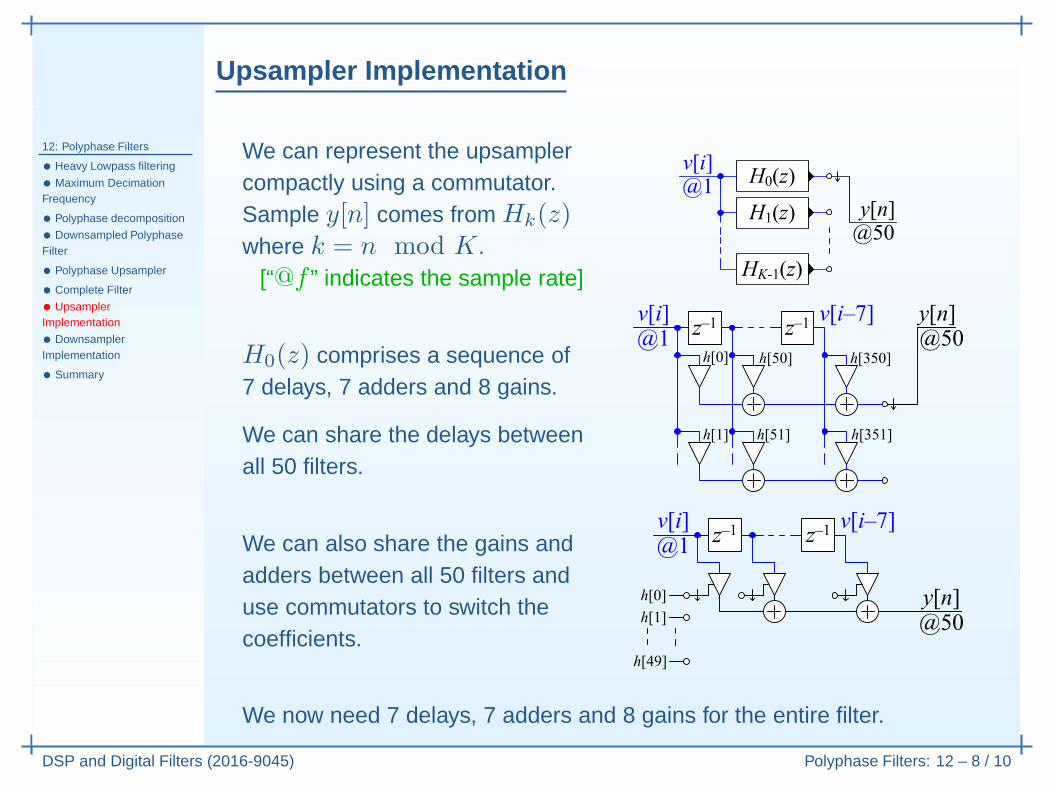
We can also share the gains andadders between all 50 filters anduse commutators to switch thecoefficients.
Upsampler Implementation
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 8 / 10
We can represent the upsamplercompactly using a commutator.Sample y[n] comes from Hk(z)where k = n mod K .
[“@f ” indicates the sample rate]
H0(z) comprises a sequence of7 delays, 7 adders and 8 gains.
We can share the delays betweenall 50 filters.
We can also share the gains andadders between all 50 filters anduse commutators to switch thecoefficients.
We now need 7 delays, 7 adders and 8 gains for the entire filter.

Downsampler Implementation
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 9 / 10
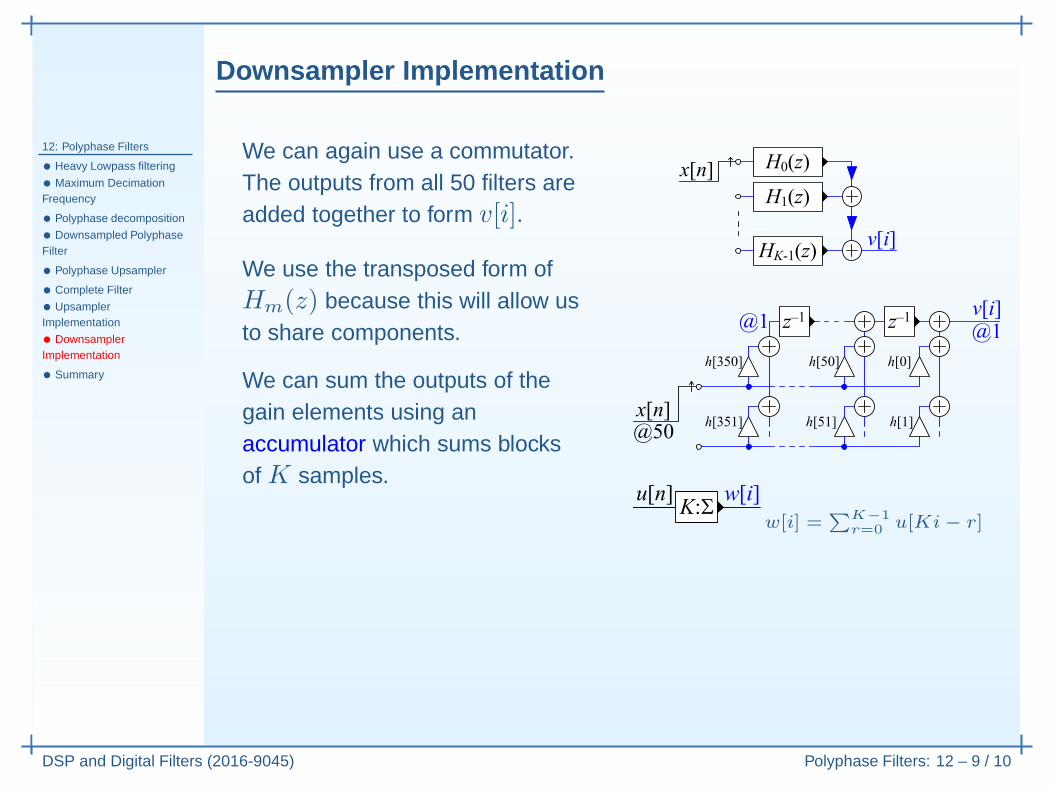
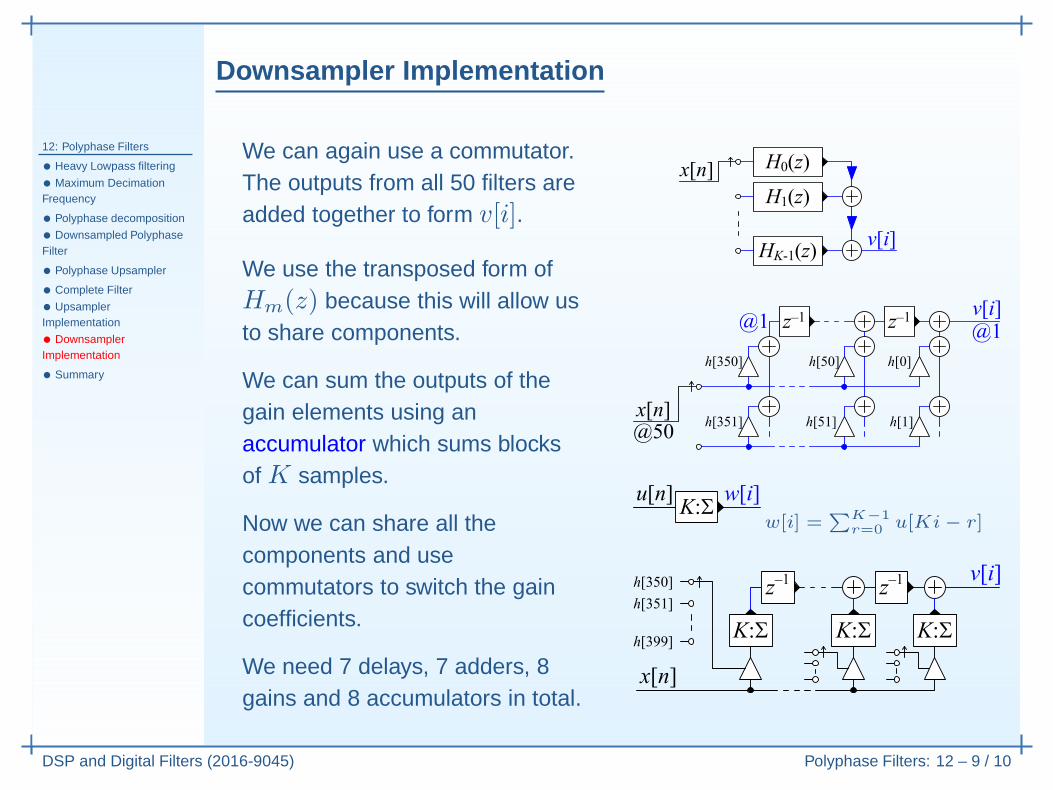
We can again use a commutator.The outputs from all 50 filters areadded together to form v[i].

Downsampler Implementation
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 9 / 10
We can again use a commutator.The outputs from all 50 filters areadded together to form v[i].
We use the transposed form ofHm(z) because this will allow usto share components.

Downsampler Implementation
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 9 / 10
We can again use a commutator.The outputs from all 50 filters areadded together to form v[i].
We use the transposed form ofHm(z) because this will allow usto share components.
Downsampler Implementation
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 9 / 10
We can again use a commutator.The outputs from all 50 filters areadded together to form v[i].
We use the transposed form ofHm(z) because this will allow usto share components.
We can sum the outputs of thegain elements using anaccumulator which sums blocksof K samples.
w[i] =∑
K−1
r=0u[Ki− r]
Downsampler Implementation
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 9 / 10
We can again use a commutator.The outputs from all 50 filters areadded together to form v[i].
We use the transposed form ofHm(z) because this will allow usto share components.
We can sum the outputs of thegain elements using anaccumulator which sums blocksof K samples.
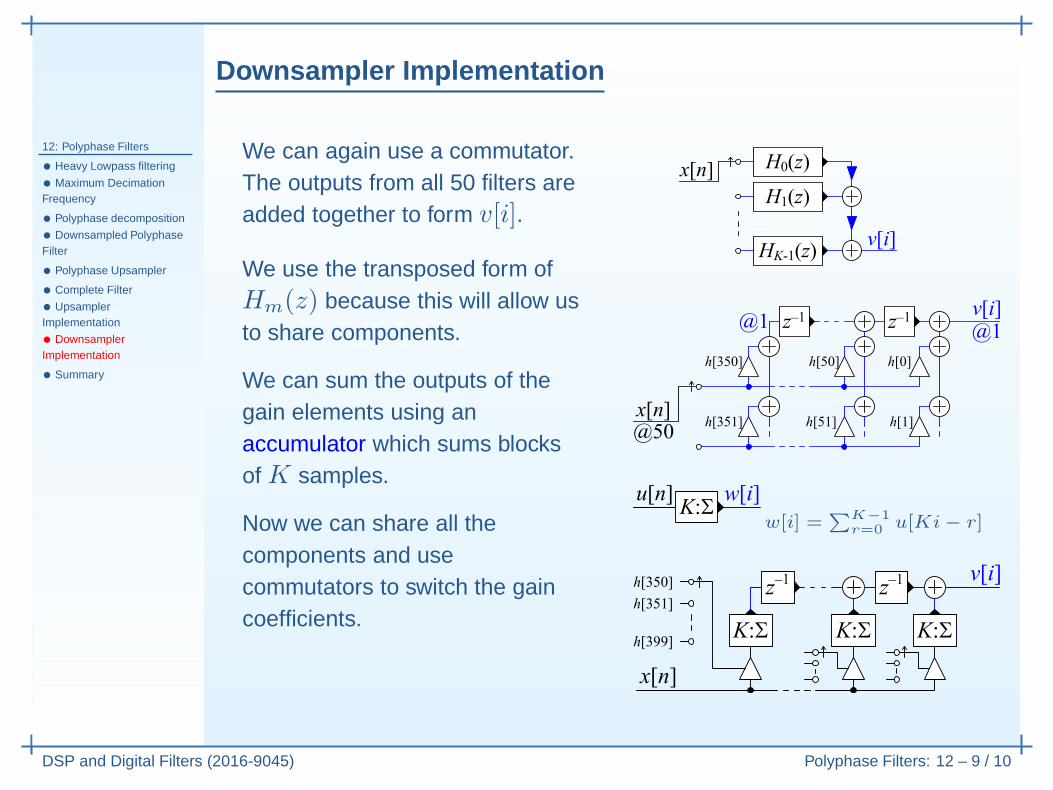
Now we can share all thecomponents and usecommutators to switch the gaincoefficients.
w[i] =∑
K−1
r=0u[Ki− r]
Downsampler Implementation
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 9 / 10
We can again use a commutator.The outputs from all 50 filters areadded together to form v[i].
We use the transposed form ofHm(z) because this will allow usto share components.
We can sum the outputs of thegain elements using anaccumulator which sums blocksof K samples.
Now we can share all thecomponents and usecommutators to switch the gaincoefficients.
We need 7 delays, 7 adders, 8gains and 8 accumulators in total.
w[i] =∑
K−1
r=0u[Ki− r]
Summary
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 10 / 10
• Filtering should be performed at the lowest possible sample rate◦ reduce filter computation by K◦ actual saving is only K
2 because you need a second filter
◦ downsampled Nyquist frequency ≥ max (ωpassband) +∆ω2

Summary
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 10 / 10
• Filtering should be performed at the lowest possible sample rate◦ reduce filter computation by K◦ actual saving is only K
2 because you need a second filter
◦ downsampled Nyquist frequency ≥ max (ωpassband) +∆ω2
• Polyphase decomposition: split H(z) as∑K−1
m=0 z−mHm(zK)
◦ each Hm(zK) can operate on subsampled data◦ combine the filtering and down/up sampling
Summary
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 10 / 10
• Filtering should be performed at the lowest possible sample rate◦ reduce filter computation by K◦ actual saving is only K
2 because you need a second filter
◦ downsampled Nyquist frequency ≥ max (ωpassband) +∆ω2
• Polyphase decomposition: split H(z) as∑K−1
m=0 z−mHm(zK)
◦ each Hm(zK) can operate on subsampled data◦ combine the filtering and down/up sampling
• Noise floor is higher because it arises from K spectral intervals thatare aliased together by the downsampling.
Summary
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 10 / 10
• Filtering should be performed at the lowest possible sample rate◦ reduce filter computation by K◦ actual saving is only K
2 because you need a second filter
◦ downsampled Nyquist frequency ≥ max (ωpassband) +∆ω2
• Polyphase decomposition: split H(z) as∑K−1
m=0 z−mHm(zK)
◦ each Hm(zK) can operate on subsampled data◦ combine the filtering and down/up sampling
• Noise floor is higher because it arises from K spectral intervals thatare aliased together by the downsampling.
• Share components between the K filters◦ multiplier gain coefficients switch at the original sampling rate◦ need a new component: accumulator/downsampler (K : Σ)
Summary
12: Polyphase Filters
• Heavy Lowpass filtering
• Maximum DecimationFrequency
• Polyphase decomposition
• Downsampled PolyphaseFilter
• Polyphase Upsampler
• Complete Filter
• UpsamplerImplementation
• DownsamplerImplementation
• Summary
DSP and Digital Filters (2016-9045) Polyphase Filters: 12 – 10 / 10
• Filtering should be performed at the lowest possible sample rate◦ reduce filter computation by K◦ actual saving is only K
2 because you need a second filter
◦ downsampled Nyquist frequency ≥ max (ωpassband) +∆ω2
• Polyphase decomposition: split H(z) as∑K−1
m=0 z−mHm(zK)
◦ each Hm(zK) can operate on subsampled data◦ combine the filtering and down/up sampling
• Noise floor is higher because it arises from K spectral intervals thatare aliased together by the downsampling.
• Share components between the K filters◦ multiplier gain coefficients switch at the original sampling rate◦ need a new component: accumulator/downsampler (K : Σ)
For further details see Harris 5.