1 v oitu re adio c mmandée sti2d t ransm iss on d'une t...
TRANSCRIPT

1ère
STI2D
Voiture radio commandée Transmission d'une trame PPM
Modulation – Démodulation – Désérialisation
TP V1.0
Formation Systèmes d'information et numérique
Objectif : Analyser le cheminement de l'information issue de la télécommande jusqu'aux servo et variateur de vitesse de la voiture radio commandée et comprendre pourquoi il faut moduler un signal haute fréquence pour transmettre un signal basse fréquence.
Documents à produire :
- ce document complété, avec notamment les commentaires sur les relevés effectués. - les copies d'écrans d'oscilloscope, jugées pertinentes.
- les remarques concernant les problèmes rencontrés ainsi que les solutions apportées.
Porteuse
modulée Porteuse
démodulée
Télécommande Démodulation
Mise en forme
Désérialisation
Récepteur
Alimentation
Commandes de l'utilisateur
(manettes)
Alimentation
Voie1 Servo
Voie2 Variateur
de vitesse

1ère
Partie : constituants de l'ensemble télécommande – voiture RC.
Repérer les éléments : télécommande, voiture, servo, variateur de vitesse et récepteur.
Les piles et batterie ne sont pas visibles sur ce document, car elles se trouvent dans leurs
emplacements respectifs. Préciser où sont placées les piles et la batterie.
Repérer, par une flèche, le transfert d'information ou d'énergie entre les différents
éléments.
Télécommande récepteur
Alimentée par pile
Servo Moteur Variateur de vitesse
Voiture
Alimentée par batterie

1ère
STI2D
Voiture radio commandée Transmission d'une trame PPM
Modulation – Démodulation – Désérialisation
TP V1.0
Formation Systèmes d'information et numérique
2ème
Partie : signal modulé en amplitude, émis par la télécommande. Mise en situation : ♦ Travail à effectuer en petit groupe.
♦ Plusieurs types de télécommandes sont à disposition, chaque groupe de travail n'utilise qu'un modèle.
♦ La télécommande se trouve sur un poste de travail, alimentée par une alimentation stabilisée afin de ne pas user inutilement les piles.
Indiquer le modèle de télécommande utilisée : ATTACK 2ER
Rechercher la valeur de l'alimentation de la télécommande utilisée : 8*1.5 V = 12V
Pour transmettre une information, les différentes télécommandes se trouvant à notre
disposition utilisent un signal porteur de fréquence 27 MHz environ. Le signal porteur est modulé en amplitude, en tout ou rien, par l'information à transmettre.
Proposer un mode opératoire permettant de visualiser le signal à l'oscilloscope.
Alimenter la télécommande avec une tension de 12V, puis relever à l’oscilloscope le signal transmis en branchant la voie de l’oscilloscope sur l’antenne, ou à côté de l’antenne pour relever l’émission de la télécommande.
Visualiser le signal transmis par la télécommande. Dans le cas de la télécommande
de la voiture radio commandée étudiée, c'est la trame PPM qui est l'information à transmettre.
On pourra afficher plusieurs signaux issus d'une même télécommande, à des instants différents, pour diverses positions des manettes sur un même écran d'oscilloscope, en utilisant les menus : REF MENU et SAUV./RAP. Exemple pour sauvegarder la courbe CH1 → REF A.
REF MENU → Réf A : Act (activé) puis SAUV./RAP → Sauv vers Réf puis source CH1 et Mise en mémoire.
La courbe ainsi mémorisée est sauvegardée dans l'oscilloscope tant qu'une nouvelle sauvegarde n'est pas de nouveau effectuée, et ce, même si l'oscilloscope est éteint.
A partir des relevés, retrouver la fréquence du signal porteur : F = 27 MHz
Résumer succinctement, le principe de la modulation d'amplitude en tout ou rien.
On multiplie le signal à transmettre par le signal porteur, donc si on a un 0 à
transmettre, on ne transmet rien, si on a un 1, on transmet le signal porteur.
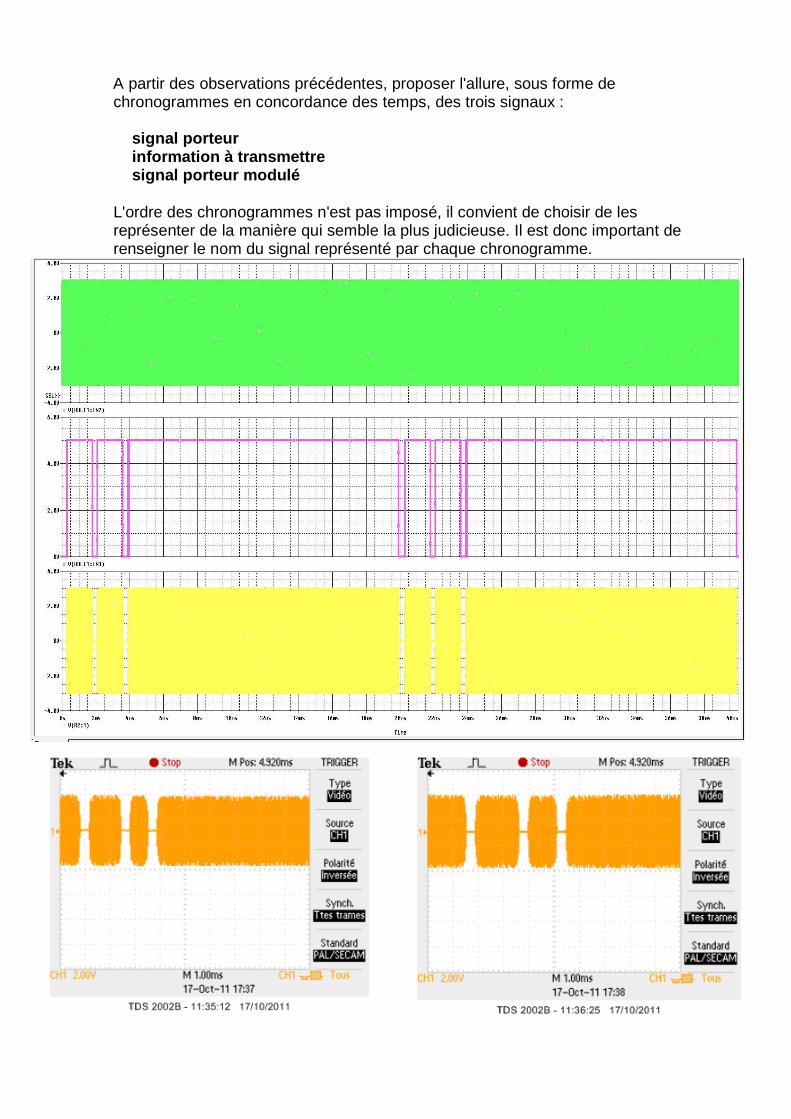
A partir des observations précédentes, proposer l'allure, sous forme de chronogrammes en concordance des temps, des trois signaux :
signal porteur information à transmettre signal porteur modulé
L'ordre des chronogrammes n'est pas imposé, il convient de choisir de les représenter de la manière qui semble la plus judicieuse. Il est donc important de renseigner le nom du signal représenté par chaque chronogramme.


1ère
STI2D
Voiture radio commandée Transmission d'une trame PPM
Modulation – Démodulation – Désérialisation
TP V1.0
Formation Systèmes d'information et numérique
3ème
Partie : signal modulé reçu et démodulé par le récepteur.
Mise en situation : ♦ Travail en binôme. ♦ Une ou plusieurs télécommandes de voitures radio
commandées sont sur des postes de travail, alimentées. ♦ Plusieurs récepteurs sont disponibles. Ils ont été modifiés
(didactisés) pour pouvoir effectuer une partie des mesures, par l'ajout d'un fil connecté directement sur le circuit imprimé.
Le récepteur se trouvant hors de la voiture radio commandée, il est également nécessaire de l'alimenter par une alimentation stabilisée.
Rechercher la valeur de l'alimentation du récepteur : 7,2 V
Afin d'éviter les interférences entre les voitures, chaque télécommande ne doit transmettre son signal qu'à un seul récepteur. Pour cela on utilise différentes paires de quartz, correspondant à une fréquence très précise du signal porteur. Remarque : toutes les fréquences des quartz sont proches de 27 MHz.
La fréquence du quartz du récepteur doit être égale à celle du quartz de l'émetteur moins 455 kHz.
Noter la fréquence du quartz de l'émetteur : 27,445 MHz
Noter la fréquence du quartz du récepteur : 27 MHz
Remarque : lors des différents relevés, il sera peut être nécessaire d'échanger les
quartz des récepteurs avec un autre binôme, ou bien d'échanger les récepteurs.
Démodulation : On cherche à extraire l'information transmise par le signal porteur
modulé. Le point de mesure qui a été ajouté sur certains récepteurs VRC, permet d'observer le signal démodulé (contenant la trame PPM), avant que les signaux Voie 1 et Voie 2 en soient extraits.
Observer le signal transmis par la télécommande ainsi que le signal démodulé, en
concordance des temps. On peut effectuer plusieurs relevés pour différentes positions des manettes que l'on précisera.
Sur les relevés effectués, rechercher la correspondance entre le signal émis et le
signal reçu.


1ère
STI2D
Voiture radio commandée Transmission d'une trame PPM
Modulation – Démodulation – Désérialisation
TP V1.0
Formation Systèmes d'information et numérique
4ème
Partie : Désérialisation → Voies 1 et 2. Mise en situation : ♦ Travail en binôme.
♦ Une ou plusieurs télécommandes de voitures radio commandées sont sur des postes de travail, alimentées.
♦ Plusieurs récepteurs sont disponibles.
Ces observations mettent en oeuvre une télécommande et un récepteur. Les récepteurs sont fragiles et n'ont pas été adaptés pour faire les mesures que l'on se propose de réaliser. Il conviendra donc de faire très attention aux courts circuits notamment.
La désérialisation consiste à dissocier les deux voies contenues dans la trame PPM.
Proposer un schéma décrivant le câblage des différents éléments et appareils
permettant d'effectuer les relevés des voies 1 et 2. Ce schéma doit être suffisamment précis pour pouvoir être utilisé par une tierce personne.
Observer le signal transmis par la télécommande et les signaux Voie1 et Voie2 en concordance des temps. On peut remarquer qu'il est nécessaire de faire apparaître trois signaux en même temps à l'oscilloscope. Cela implique de sauvegarder le signal transmis par la télécommande, puis de relever les signaux des voies 1 et 2 sans changer la position des manettes.
Sur les relevés, rechercher les valeurs caractéristiques des signaux Voie1 et
Voie2, telles que : 1,5 ms pour la manette en position neutre, 1 ms et 2 ms pour les positions extrêmes, ainsi que la période 20 ms correspondant à la répétition des signaux de commande des servos.


f] Synthèse des signaux.
1ère
STI2D
Voiture radio commandée Transmission d'une trame PPM
Modulation – Démodulation – Désérialisation
TP V1.0
Formation Systèmes d'information et numérique
5ème
Partie : Repérage des constituants de la chaîne d'énergie et de la chaîne d'information.
Afin de lier les observation précédentes avec les constituants de la voiture radio
commandée, annoter les chaînes d'énergie et d'information en utilisant des termes tels que :
conversion série / parallèle ou conversion parallèle / série transmission filaire ou transmission non filaire
servo, signal modulé ou signal démodulé
Commandes issues de la
télécommande
Vitesse av/ar
Direction
ACQUERIR
Récepteur
radio
Chaîne d'information
TRAITER
INFORMER Signal sonore
Voie 1 direction
Voie 2 vitesse
Voiture en
position initiale
Chaîne d'énergie
ALIMENTER
Batterie
DISTRIBUER
Variateur de vitesse
DISTRIBUER Pont en H
CONVERTIR
Moteur à courant continu
CONVERTIR
Moteur à courant continu
TRANSMETTRE
Adaptation
couple - vitesse
TRANSMETTRE
Adaptation
Mettre en mouvement
Direction
Voiture
déplacée

1ère
STI2D
Voiture radio commandée Transmission d'une trame PPM
Modulation – Démodulation – Désérialisation
TP V1.0
Formation Systèmes d'information et numérique
6ème
Partie : Synthèse.
Compléter, en concordance des temps, l'allure des signaux participant à la transmission de l'information : vitesse et direction, pour une position quelconque des manettes, que l'on précisera.
Signal issu de l'antenne de la télécommande
t
Signal démodulé (récepteur)
t
Servo VOIE 1
t
Variateur de
vitesse VOIE 2
t

1ère
STI2D
Voiture radio commandée Transmission d'une trame PPM
Modulation – Démodulation – Désérialisation
TP V1.0
Formation Systèmes d'information et numérique
7ème
Partie : Pourquoi utiliser un signal porteur ? Rechercher pourquoi il est nécessaire de passer par un signal porteur haute fréquence
pour transmettre à distance des informations qui sont élaborées sous forme de signaux basse fréquence.
On pourra s'interroger sur la possibilité, pour un récepteur, de différencier plusieurs signaux basse fréquence tels que vitesse et direction, ou des signaux provenant de plusieurs voitures.
On pourra également s'interroger sur la possibilité, au niveau technique, de transmettre à distance un signal basse fréquence.