1 sliding-mode observers for systems with unknown inputszak/uio_smo_tac.pdf2008/08/22 · 1 2 rm1...
TRANSCRIPT

1
Sliding-Mode Observers for Systems With
Unknown Inputs
Karanjit Kalsi†, Jianming Lian†, Stefen Hui‡, Stanislaw H. Zak†
Abstract
The problem of designing sliding-mode observers for systems with unknown inputs is considered
when the so-called observer matching condition is not satisfied. This condition severely restricts the
applicability of sliding-mode observers. To circumvent the observer matching condition, thereby broad-
ening the class of systems for which sliding-mode observers can be constructed, a possible method
is to generate auxiliary outputs that are then used to construct the sliding-mode observer. High-order
sliding-mode exact differentiators can be used to obtain auxiliary outputs. A proof of the asymptotic
stability of the state estimation error is provided. However, the resulting overall observer architecture
is complex. In this paper, high-gain approximate differentiators are proposed to generate the estimates
of auxiliary outputs instead. The resulting architecture is much simpler than the architecture involving
high-order sliding-mode exact differentiators. It is shown that the state estimation error is uniformly
ultimately bounded with respect to a ball whose radius can be controlled by design parameters. The
performance of the high-gain approximate differentiator based sliding-mode observer is demonstrated
to be comparable to that of the observer that uses high-order sliding-mode exact differentiators. The
use of the presented observers to reconstruct the unknown inputs is also analyzed and then illustrated
by numerical examples.
Keywords: Sliding-mode observer, high-order sliding-mode exact differentiator, high-gain approximate
differentiator, unknown input reconstruction.
I. INTRODUCTION
Observers are dynamical systems that can be used to estimate the state of a plant using
its input-output measurements; they were first proposed by Luenberger [1]. In some cases, the
† School of Electrical and Computer Engineering, Purdue University, West Lafayette, IN 47907.‡ Department of Mathematical Sciences, San Diego State University, San Diego, CA 92182.
August 22, 2008 DRAFT

2
inputs to the plant are unknown or partially known, which led to the development of the so-called
unknown input observer (UIO). Examples of linear UIO architectures that have been developed
for linear system are analyzed in [2]–[8]. For non-linear system with unknown inputs, some
of the UIO architectures can be found in [9]–[11]. Motivated by the design of sliding-mode
controllers, first-order sliding mode based UIOs have been developed, see, for example, [12]–
[17]. The main advantage of using sliding-mode observers over their linear counterparts is that
while in sliding, they are insensitive to the unknown inputs and, moreover, they can be used to
reconstruct unknown inputs which could be a combination of system disturbances, faults or non-
linearities. The reconstruction of unknown inputs has found useful applications in fault-detection
and isolation [8], [15], [16].
In most of the linear and non-linear unknown input observers proposed thus far, the necessary
and sufficient conditions for the construction of such observers is that the invariant zeros of the
system must lie in the open left half complex plane, and the transfer function matrix between
unknown inputs and measurable outputs satisfies the observer matching condition. However,
the second condition seriously limits the applicability of this technique. Recently, high-order
sliding mode based unknown input observers [11], [18]–[21] have been developed for systems
that do not satisfy the observer matching condition. In [20], a suitable change of coordinates is
first provided via a constructive algorithm to transform the system into a quasi-block triangular
observable form. Then a step-by-step second order sliding-mode observer is constructed for the
transformed system. In [21], auxiliary outputs are defined such that the conventional unknown
input sliding-mode observer proposed in [15] can be developed for systems without the observer
matching condition. In order to obtain those auxiliary outputs, high-order sliding-mode observers
which act as exact differentiators [22] are constructed based on the super-twisting algorithm
proposed in [23].
In this paper, we adopt the idea of generating auxiliary outputs from [21]. We first incorporate
the high-order sliding-mode observers proposed in [21] into the construction of the sliding-mode
observer which was first introduced in [12] and later modified for a more general class of systems
in [17]. Then we propose a new method of using high-gain observers instead of high-order
sliding-mode observers. High-gain observers are another type of observers for systems with
uncertainties. They were used in [24], [25] to develop output feedback controllers stabilizing
feedback linearizable uncertain systems. The applications of high-gain observers in adaptive
August 22, 2008 DRAFT

3
control or nonlinear control of uncertain systems can be found in [26], [27]. The incorporation
of high-gain observers into sliding-mode control was initially proposed in [28] and then in [29].
In this paper, high-gain observers are used as approximate differentiators [30] to obtain the
estimates of those auxiliary outputs. The proposed high-gain approximate differentiator based
sliding-mode observer can achieve similar state estimation performance to that of the high-
order sliding-mode exact differentiator based sliding-mode observer. The major advantage of
the proposed high-gain observers over high-order sliding-mode observers used in [21] is the
simplicity of the overall observer architecture. To the best of our knowledge, it is the first time
that the sliding-mode observer presented in [12] is applied to the state observation for linear
systems without the observer matching condition being satisfied. It is also the first time that the
high-gain observer is used in such an application.
The remainder of this paper is organized as follows. The system description and the problem
statement are given in Section II. The sliding-mode exact differentiator is reviewed in Section III,
where it is then incorporated into the sliding-mode observer design. In Section IV, the high-gain
approximate differentiator based sliding-mode observer is proposed and analyzed. Simulation
results using the proposed high-gain approximate differentiator based sliding-mode observer are
included in Section V. Conclusions are in Section VI.
II. SYSTEM DESCRIPTION AND PROBLEM STATEMENT
Let B1 ∈ Rn×m1 , B2 ∈ Rn×m2 and C ∈ Rp×n be known constant matrices, with B2 and
C being of full rank, that is, rank B2 = m2 and rank C = p, and m2 ≤ p. We consider the
following class of linear time-invariant systems with unknown inputs:
x = Ax + B1u1 + B2u2
y = Cx,
(1)
where x ∈ Rn, y ∈ Rp, u1 ∈ Rm1 and u2 ∈ Rm2 are the state, output, known and unknown
input vectors. Let ‖ · ‖ denote the standard Euclidean norm. We assume that there is ρ > 0 such
that ‖u2(t)‖ ≤ ρ for all t. We also assume that the invariant zeros of the system model given
by the triple (A,B2,C) are in the open left-hand complex plane, or equivalently,
rank
sIn −A B2
C Op×m2
= n + m2. (2)
August 22, 2008 DRAFT

4
Fig. 1. Diagram of the sliding-mode observer.
for all s such that <(s) ≥ 0.
For the system modeled by (1), if the observer matching condition [20] is satisfied, that is,
rank B2 = rank(CB2) = m2, (3)
we can construct the following sliding-mode observer first proposed in [12],
˙x = Ax + B1u1 + L (y − y)−B2E(y, y, η) (4)
with y = Cx and
E(y, y, η) =
ηF (y−y)‖F (y−y)‖ if F (y − y) 6= 0
0 if F (y − y) = 0,(5)
where η is a positive design parameter, L ∈ Rn×p and F ∈ Rm2×p are matrices such that
(A−LC)> P + P (A−LC) = −2Q < 0
and
FC = B>2 P
for some symmetric positive definite P ∈ Rn×n and Q ∈ Rn×n. The architecture of the above
sliding-mode observer is illustrated in Fig. 1. A design algorithm that is adapted from [17] is
summarized in Appendix A.
However, the observer matching condition (3) is sometimes too restrictive for the practical
applications of the above observer. Many physical systems that can be modeled by (1) do not
August 22, 2008 DRAFT

5
satisfy the observer matching condition (3). In the following, we first construct a sliding-mode
observer for the systems for which the observer matching condition does not hold. We do
this by incorporating sliding-mode exact differentiators proposed in [21]. Then we use high-
gain approximate differentiators that have similar performance but have lower implementation
complexity than sliding-mode exact differentiators.
III. SLIDING-MODE EXACT DIFFERENTIATOR
In this section, we incorporate the sliding-mode exact differentiator proposed in [21] into the
sliding-mode observer design presented in Section II to relax the restriction imposed by the
observer matching condition (3).
A. Auxiliary Output Signal Generation
We first describe the sliding-mode exact differentiators that are used in [21] to generate
auxiliary outputs. Let ci be the i-th row of the output matrix C. Recall that the relative degree
of the i-th output yi with respect to the unknown input u2 is defined to be the smallest positive
integer ri such that
ciAkB2 = 0, k = 0, . . . , ri − 2
ciAri−1B2 6= 0.
We can choose integers γi (1 ≤ γi ≤ ri) such that
Ca =
c1
...
c1Aγ1−1
...
cp
...
cpAγp−1
is of full rank with rank(CaB2) = rank B2. It is proved in [21] that the system zeros of the
system model given by the triple (A, B2,Ca) are in the open left-hand complex plane if the
August 22, 2008 DRAFT

6
triple (A, B2,C) satisfies (2). Thus, we can construct the sliding-mode observer of the form (4)
for the following system model
x = Ax + B1u1 + B2u2
ya = Cax,
if the output ya = Cax is available. However, the auxiliary outputs in ya are not measurable
and additional observers are required to estimate them.
To proceed, let
yij = ciAj−1x, i = 1, . . . , p, j = 1, . . . , γi. (6)
Thus, we have ya = [y>a1 · · ·y>ap]>, where yai = [yi1 · · · yiγi
]>. The dynamics of yij , j =
1, . . . , γi − 1, are given by
yi1 = yi2 + ciB1u1
...
yi(γi−2) = yi(γi−1) + ciAγi−3B1u1
yi(γi−1) = ciAγi−1x + ciA
γi−2B1u1,
(7)
where x and u1 can be viewed, respectively, as unknown input and known input vectors. We
assume as in [21] that x and x are bounded and
|yij| ≤ dij, i = 1, . . . , p and j = 1, . . . , γi, (8)
which implies that u1 is bounded. Let ν(·), the injection term, be defined by the following super
twisting algorithm [22],ν(·) = φ(·) + λ| · | 12 sign(·)φ(·) = α sign(·),
where λ and α are positive design parameters. For the system (7), which has triangular input
observable form [31], a second-order sliding-mode observer can be constructed as follows:
˙yi1 = ν(yi1 − yi1) + ciB1u1
˙yi2 = Ei1ν(yi2 − yi2) + ciAB1u1
...˙yi(γi−1) = Ei(γi−2)ν
(yi(γi−1) − yi(γi−1)
)+ ciA
γi−2B1u1,
(9)
August 22, 2008 DRAFT

7
where yi1 = yi1 and yij = ν(yi(j−1) − yi(j−1)), j = 2, . . . , γi − 1, and Eij , j = 1, . . . , γi − 2, are
defined as
Eij =
1 if |yik − yik| = 0 for all k < j
0 otherwise.
Let yij = yij − yij . It follows from (7) and (9) that
˙yi1 = yi2 − ν(yi1 − yi1)
˙yi2 = yi3 − Ei1ν(yi2 − yi2)...
˙yi(γi−2) = yi(γi−1) − Ei(γi−3)ν(yi(γi−2) − yi(γi−2)
)
˙yi(γi−1) = ciAγi−1x− Ei(γi−2)ν
(yi(γi−1) − yi(γi−1)
).
(10)
By choosing sufficiently large λ and α, (see [20]), the system (10) enters sliding mode on the
manifold yi1 = · · · = yi(γi−1) = 0 after a finite time Ti > 0, which implies that
˙yi1 = · · · = ˙yi(γi−1) = 0. (11)
Thus, it follows from (6), (10) and (11) that
ν(yi1 − yi1) = ciAx
ν(yi2 − yi2) = ciA2x
...
ν(yi(γi−1) − yi(γi−1)
)= ciA
γi−1x.
(12)
Let ys = [y>s1 · · · y>sp]> with
ysi =
yi1
ν(yi1 − yi1)
ν(yi2 − yi2)...
ν(yi(γi−1) − yi(γi−1)
)
. (13)
It follows from (12) and (13) that ys = Cax, that is, ys = ya after a finite time T = max1≤i≤p Ti.
Then, in [21], the signal ys derived from the sliding-mode exactor differentiators, described
by (9), is directly used to construct a sliding-mode observer presented in [15]. However, the
transient response of the constructed sliding-mode observer during the time interval [t0, t0 +T ],
where t0 is the initial time, is not analyzed. In the following subsection, we apply the above
sliding-mode exact differentiators to construct the sliding-mode observer.
August 22, 2008 DRAFT

8
B. Sliding-Mode Observer Construction
We first introduce the saturation of the signal ys as yss = [ys
s1> · · · ys
sp>]> with
yssi =
Si1 sat(
yi1
Si1
)
Si2 sat(
ν(yi1−yi1)Si2
)
Si3 sat(
ν(yi2−yi2)Si3
)
...
Siγisat
(ν(yi(γi−1)−yi(γi−1))
Siγi
)
,
where sat(·) is the saturation function and Sij > dij with dij defined in (8). Then, we construct
the sliding-mode observer of the form
˙x = Ax + B1u1 + La (yss − ya)−B2Ea(y
ss, ya, η) (14)
with ya = Cax and
Ea(yss, ya, η) =
ηF a(ya−ys
s)‖F a(ya−ys
s)‖ if F a (ya − yss) 6= 0
0 if F a (ya − yss) = 0,
where La ∈ Rn×γ and F a ∈ Rm2×γ are matrices such that
(A−LaCa)> P a + P a (A−LaCa) = −2Qa < 0
and
F aCa = B>2 P a (15)
for some symmetric positive definite P a ∈ Rn×n and Qa ∈ Rn×n. The matrices La, F a and P a
can be calculated using the design algorithm presented in Appendix A.
Remark 1: In practice, even though yij is bounded, we may not know the bound of yij , that
is, the exact value of dij . However, this does not restrict the choice of Sij significantly. In fact,
we are free to select a very large Sij because the purpose of saturation is to guarantee the
boundedness of the observer state vector x(t) during the time interval [0, t0 + T ].
Let e = x − x denote the state estimation error. Then the dynamics of the state estimation
error are given by
e = Ae + La (yss − ya)−B2u2 −B2Ea(y
ss, ya, η). (16)
August 22, 2008 DRAFT

9
In the following, we analyze the performance of the sliding-mode exact differentiator based
sliding-mode observer (14).
Theorem 1: For the dynamical system (1) and the sliding-mode observer (14) with sliding-
mode exact differentiators (9), if η ≥ ρ, then limt→∞ e(t) = 0. Specifically, for any given
positive real R, there exists a finite time Tf (R) such that ‖e(t)‖ ≤ R for t ≥ t0 + Tf (R).
Proof: For t0 ≤ t ≤ t0 + T , it is guaranteed that the observer state vector x(t) in (14) is
bounded because u1, yss and Ea(y
ss, ya, η) are bounded and A − LaCa is Hurwitz. Thus, we
know that e(t) is bounded for t0 ≤ t ≤ t0 + T . For t ≥ t0 + T , we have ys(t) = ya(t) and thus
the dynamics of the state estimation error (16) become
e = Ae + La (ys − ya)−B2u2 −B2Ea(ys, ya, η)
= (A−LaCa) e−B2u2 −B2Ea(ys, ya, η). (17)
Consider the Lyapunov function candidate, V = 12e>P ae for t ≥ t0 + T , where P a is defined
in (III-B). Evaluating the time derivative of V on the solutions of (17), we obtain
V = e>P a (A−LaCa) e− e>P aB2u2 − e>P aB2Ea(ya, ya, η)
= −e>Qae− (F aCae)>u2 − η(F aCae)>Ea(ys, ya, η).
If F aCae = 0, we have
−(F aCae)>u2 − (F aCae)>Ea(ys, ya, η) = 0. (18)
On the other hand, if F aCae 6= 0, we have
−(F aCae)>u2 − (F aCae)>Ea(ys, ya, η)
= −(F aCae)>u2 − η(F aCae)>F aCae
‖F aCae‖≤ −(η − ρ)‖F aCae‖
≤ 0. (19)
It follows from (18) and (19) that in both cases we have
V ≤ −e>Qae ≤ −λmin(Qa)‖e‖2, (20)
which implies that V < 0 and, hence, limt→∞ e(t) = 0.
August 22, 2008 DRAFT

10
We can rewrite (20) as
V ≤ −λmin(Qa)‖e‖2 ≤ −2µaV, (21)
where µa = λmin(Qa)/λmax(P a). It follows from (21) and the comparison lemma (see, for
example, [32, p. 7] or [33, p. 85]) that
V (t) ≤ exp (−2µa (t− t0 − T )) V (t0 + T ) ,
and thus
‖e(t)‖ ≤ exp (−µa (t− t0 − T ))
√λmax(P a)
λmin(P a)‖e(t0 + T )‖ ,
where e(t0 + T ) is bounded. If√
λmax(P a)/λmin(P a)‖e(t0 + T )‖ > R, then for any given
positive real R, we can find the finite time Tf (R) such that ‖e(t)‖ ≤ R for t ≥ t0 + Tf (R),
where Tf (R) is the solution to the equation
exp (−µa (Tf (R)− T ))
√λmax(P a)
λmin(P a)‖e(t0 + T )‖ = R.
Solving the above gives
Tf (R) = T +1
µa
ln
(√λmin(P a)
λmax(P a)
‖e(t0 + T )‖R
).
On the other hand, if√
λmax(P a)/λmin(P a)‖e(t0 + T )‖ ≤ R, then ‖e(t)‖ ≤ R for t ≥ t0 + T .
In such a case, we can choose Tf (R) = T . Therefore, there exists a finite time Tf (R) such that
‖e(t)‖ ≤ R for t ≥ t0 + Tf (R), which concludes the proof of the theorem.
Corollary 1: For sufficiently large η, the sliding surface: e : σ = F aCae = 0, is invariant
in the state estimation error space and is reached in finite time.
Proof: For a given positive real R, it follows from Theorem 1 that there exists a finite
time Tf (R) such that e(t) is bounded, that is, σ(t) is bounded for t0 ≤ t ≤ t0 + T (R) and
‖e(t)‖ ≤ R for t ≥ t0 + Tf (R). For t ≥ t0 + Tf (R), we obtain, using (15) and (17),
σ>σ = σ> (F aCa(A−LaCa)e− F aCaB2u2 − F aCaB2Ea(ys, ya, η))
≤ ‖F aCa(A−LaCa)‖‖e‖‖σ‖ − σ>(B>2 P aB2)u2 − ησ>(B>
2 P aB2)σ
‖σ‖≤ R‖F aCa(A−LaCa)‖‖σ‖+ λmax(B
>2 P aB2)‖u2‖‖σ‖ − ηλmin(B
>2 P aB2)‖σ‖
≤ −(
η − ρλmax(B>2 P aB2) + R‖F aCa(A−LaCa)‖
λmin(B>2 P aB2)
)λmin(B
>2 P aB2)‖σ‖. (22)
August 22, 2008 DRAFT

11
The matrix B>2 P aB2 is symmetric positive definite because B2 is of full rank and P a is positive
definite. Therefore, λmin(B>2 P aB2) > 0. If we choose η such that
η ≥ ρλmax(B>2 P aB2) + R‖F aCa(A−LaCa)‖
λmin(B>2 P aB2)
+ ε,
where ε is a small positive constant, then we obtain
σ>σ ≤ −ε‖σ‖, (23)
which implies that e : F aCae = 0 is invariant.
Using the same arguments as in [15, p. 53], we rewrite (23) as
1
2
d
dt‖σ‖2 ≤ −ε‖σ‖. (24)
Integrating (24) from t0 + Tf (R) to t, we obtain
‖σ(t)‖ − ‖σ(t0 + Tf (R))‖ ≤ −ε(t− t0 − Tf (R)).
Let Ts denote the time the sliding surface is reached. We have
‖σ(Ts)‖ − ‖σ(t0 + Tf (R))‖ ≤ −ε(Ts − t0 − Tf (R)),
which implies that
Ts ≤ t0 + Tf (R) +‖σ(t0 + Tf (R))‖
ε.
Thus, the proof of the corollary is complete.
It follows from Corollary 1 that the state estimation error, e, enters sliding mode along e :
σ = 0 after a finite time, and therefore
σ = F aCa (A−LaCa) e− F aCaB2u2 − F aCaB2Ea(yss, ya, η) = 0. (25)
We have limt→∞ e(t) = 0 and then it follows from (25) that as t →∞,
F aCaB2u2 = −F aCaB2Ea(yss, ya, η). (26)
Taking into account (15), we can rewrite (26) as
B>2 P aB2u2 = −B>
2 P aB2Ea(yss, ya, η).
Because B>2 P aB2 is invertible, we obtain
u2 = −Ea(yss, ya, η).
Thus we can estimate the unknown input u2 with increasing accuracy as t →∞.
August 22, 2008 DRAFT

12
IV. HIGH-GAIN APPROXIMATE DIFFERENTIATOR
Although we can obtain the exact augmented output ya after a finite time by using sliding-
mode exact differentiators, the implementation of second-order sliding-mode observers becomes
complicated for large γi. On the other hand, it is also difficult to choose appropriate λ and α for
the super twisting algorithm. In this section, we propose to use high-gain observers to generate
estimates of those auxiliary outputs in the ya.
A. High-Gain Observer Construction
The dynamics of yai, i = 1, . . . , p, are given by
yi1 = yi2 + ciB1u1
...
yi(γi−1) = yiγi+ ciA
γi−2B1u1
yiγi= fi(x,u2) + ciA
γi−1B1u1,
which can be written as
yai = Aiyai + bi1fi(x, u2) + bi2u1
yi1 = ciyai,
(27)
where the pair (Ai, bi1) is in canonical controllable form which represents the chain of γi
integrators,
fi(x,u2) = ciAγix + ciA
γi−1B1u2, (28)
bi2 = [ciB1 · · · ciAγi−1B1]
> and ci = [1 0 · · · 0]. We also assume for the above system (27)
that x and u1 are bounded and yij satisfies (8). If γi > 1, we construct the following high-gain
observers, see Fig. 2,
˙yi1 = yi2 + αi1
ε(yi1 − yi1) + ciB1u1
...˙yi(γi−1) = yiγi
+αi(γi−1)
εγi−1 (yi1 − yi1) + ciAγi−2B1u1
˙yiγi=
αiγi
εγi(yi1 − yi1) + ciA
γi−1B1u1,
(29)
where ε ∈ (0, 1) is a design parameter and αij , j = 1, . . . , γi, are selected so that the roots of
the equation, sγi + αi1sγi−1 + · · · + αi(γi−1)s + αiγi
= 0, have negative real parts. Let yhi =
August 22, 2008 DRAFT

13
Fig. 2. Diagram of the high-gain observer.
[yi1 · · · yiγi]> and li = [αi1/ε · · · αiγi
/εγi ]>. We can rewrite (29) as
yhi = Aiyhi + lici (yai − yhi) + bi2u1. (30)
If γi = 1, we do not need to construct the above high-gain observer (30) because of the availability
of yi1. In such a case, we have yhi = yai = yi1. To proceed, let ζi = 0 if γi = 1 and let
ζi = [ζi1 · · · ζiγi]> if γi > 1, where
ζij =yij − yij
εγi−j, j = 1, . . . , γi. (31)
It follows from (27) and (30) that
εζi = Aciζi + εbi1fi(x,u2), (32)
where Aci = εD−1i (Ai − lici)Di is a Hurwitz matrix independent of ε.
Proposition 1: For the high-gain observer (30), there exists a finite time Ti(ε) such that
‖ζi(t)‖ ≤ βiε for some positive constant βi and t ≥ t0 + Ti(ε). Moreover, Ti(ε) approaches
zero when ε approaches to zero, that is, limε→0+ Ti(ε) = 0.
Proof: See Appendix B.
It follows from (31) that yai − yhi = Diζi, where Di = diag[εγi−1 εγi−2 · · · 1]. Let yh =
[y>h1 · · · y>hp]>, D = diag[D1 · · · Dp] and ζ = [ζ>1 · · · ζ>p ]>. We have
ya − yh = Dζ. (33)
August 22, 2008 DRAFT

14
Fig. 3. Diagram of the high-gain approximate differentiators based sliding-mode observer.
Note that the induced Euclidean norm of D is 1, that is, ‖D‖ = 1. Let βi = 0 and Ti(ε) = 0 if
γi = 1. Thus, it follows from Proposition 1 that ‖ζ‖ ≤ βε, where β = (∑p
i=1 β2i )
12 , after a finite
time T (ε) = max1≤i≤p Ti(ε), and limε→0 T (ε) = 0.
B. State Estimation Performance Analysis
In order to eliminate the peaking phenomena that accompanies the operation of the above high-
gain observer [24], we introduce the saturation of the signal yh such that ysh = [ys
h1> · · · ys
hp>]>,
where yshi = yai = yi1 if γi = 1 and
yshi =
Si1 sat(
yi1
Si1
)
...
Siγisat
(yiγi
Siγi
)
with Sij > dij if γi > 1. Then we construct the following sliding-mode observer,
˙x = Ax + B1u1 + La (ysh − ya)−B2Ea(y
sh, ya, η), (34)
where ya = Cax and
Ea(ysh, ya, η) =
ηF a(ya−ys
h)‖F a(ya−ys
h)‖ if F a (ya − ysh) 6= 0
0 if F a (ya − ysh) = 0.
The matrices La and F a are identical to those in (14). A block diagram of the above sliding-mode
observer is given in Fig. 3. The It follows from (1) and (34) that
August 22, 2008 DRAFT

15
e = Ae + La (ysh − ya)−B2u2 −B2Ea(y
sh, ya, η). (35)
In the following, we analyze the performance of the proposed high-gain approximate differen-
tiator based sliding-mode observer given by (34).
Theorem 2: For the dynamical system (1) and the associated sliding-mode observer (34)
with high-gain approximate differentiators (30), there exists a constant ε∗ ∈ (0, 1) such that
if ε ∈ (0, ε∗) and η ≥ ρ, then the state estimation error e(t) is uniformly ultimately bounded.
Specifically, ‖e(t)‖ ≤ κ(ε) after a finite time Tf (ε), where
κ(ε) =κ1ε +
√κ2
1ε2 + 4µaκ1ε
2µa
√2
λmin(P a)
for positive constants µa, κ1 and κ2.
Proof: It follows from Proposition 1 that ‖ζ(t)‖ ≤ βε for t ≥ t0 + T (ε). Then, it follows
from (33) that ‖ya(t) − yh(t)‖ ≤ βε for t ≥ t0 + T (ε). There exists a constant ε such that if
‖ya(t)− yh(t)‖ ≤ βε, then yh(t) is not saturated, that is, ysh(t) = yh(t). Thus, we can choose
ε∗ = minε, 1 such that if ε ∈ (0, ε∗), then ‖ζ(t)‖ ≤ βε and ysh(t) = yh(t) after a finite time
T (ε).
For t0 ≤ t ≤ t0 + T (ε), it is guaranteed that the observer state vector x(t) in (34) is bounded
because u1, ysh and Ea(y
sh, ya, η) are bounded and A−LaCa is Hurwitz. Thus, e(t) is bounded
for t0 ≤ t ≤ t0 + T (ε). For t ≥ t0 + T (ε), because ysh(t) = yh(t) and yh = ya − Dζ, the
dynamics of the state estimation error (35) become
e = Ae + La (yh − ya)−B2u2 −B2Ea(yh, ya, η)
= Ae + La (ya −Dζ − ya)−B2u2 −B2Ea(yh, ya, η)
= (A−LaCa) e−LaDζ −B2u2 −B2Ea(yh, ya, η). (36)
Consider the Lyapunov function candidate, V = 12e>P ae for t ≥ t0 +T (ε). Evaluating the time
derivative of V on the solutions of (36), we obtain
V = e>P (A−LaCa) e− e>P aLaDζ − e>P aB2u2 − e>P aB2Ea(yh, ya, η)
= −e>Qae− e>P aLaDζ − (F aCae)>u2 − (F aCae)>Ea(yh, ya, η)
= −e>Qae− e>P aLaDζ − (F aCae + FDζ − F aDζ)>u2
− (F aCae + F aDζ − F aDζ)>Ea(yh, ya, η)
August 22, 2008 DRAFT

16
= −e>Qae− e>P aLaDζ + (F aDζ)>u2 + (F aDζ)>Ea(yh, ya, η)
− (F aCae + FDζ)>u2 − (F aCae + F aDζ)>Ea(yh, ya, η).
If F a(Cae + Dζ) = 0, then
−(F aCae + F aDζ)>u2 − (F aCae + F aCae)>Ea(ya, ya, η) = 0. (37)
On the other hand, if F a(Cae + Dζ) 6= 0, then
−(F aCae + F aDζ)>u2 − (F aCae + F aCae)>Ea(ya, ya, η)
= −(F aCae + F aDζ)>u2 − η(F aCae + F aDζ)>F aCae + F aDζ
‖F aCae + F aDζ‖≤ −(η − ρ)‖F aCae + F aDζ‖
≤ 0. (38)
It follows from (37) and (38) that in both cases we have
V ≤ −e>Qae− e>P aLaDζ + (F aDζ)>u2 + (F aDζ)>Ea(yh, ya, η). (39)
Performing some manipulations gives
V ≤ −λmin(Qa)‖e‖2 + ‖P aLa‖‖D‖‖ζ‖‖e‖+ (η + ρ)‖F a‖‖D‖‖ζ‖
≤ −λmin(Qa)‖e‖2 + βε‖P aLa‖‖e‖+ (η + ρ)βε‖F a‖
= −2µaV + κ1ε√
V + κ2ε, (40)
where
κ1 =
√2β‖P aLa‖√λ
max(P a)
and κ2 = (η + ρ)β‖F a‖.
It follows from (40) that
V ≤ −µaV − µaV + κ1ε√
V + κ2ε
= −µaV −(√
V −R−)(√
V −R+
), (41)
where
R− =κ1ε−
√κ2
1ε2 + 4µaκ2ε
2µa
< 0 and R+ =κ1ε +
√κ2
1ε2 + 4µaκ1ε
2µa
> 0.
We conclude from (41) that V < 0 when ‖e‖ > R+. In summary, the state estimation error e
is uniformly ultimately bounded with respect to any closed ball of radius greater than R+.
August 22, 2008 DRAFT

17
Hence, as long as√
V > R+, that is, for V > R2+, we have
(√V −R−
)(√V −R+
)< 0.
Therefore, if V (t0 + T (ε)) = V (e(t0 + T (ε))) > R2+ and V (t) > R2
+ for t ≥ t0 + Tf (ε), then
V ≤ −µaV , which implies that
V (t) ≤ exp (−µa (t− t0 − T (ε))) V (t0 + T (ε)) .
Thus, we can find a finite time Tf (ε) such that V (t) ≤ R2+ for t ≥ t0 +T (ε), where Tf (ε) is the
solution to the equation
V (t0 + T (ε)) exp (−µa (Tf (ε)− T (ε))) = R2+,
and has the form,
Tf (ε) = T (ε) +1
µa
ln
(V (t0 + T (ε))
R2+
).
On the other hand, if V (t0 + T (ε)) ≤ R2+, then V (t) ≤ R2
+ for t ≥ t0 + T (ε). In such a case,
we can choose Tf (ε) = T (ε). Therefore, there exists a finite time Tf (ε) such that V (t) ≤ R2+
for t ≥ t0 + Tf (ε), which implies ‖e(t)‖ ≤ κ(ε), where
κ(ε) =κ1ε +
√κ2
1ε2 + 4µaκ1ε
2µa
√2
λmin(P a).
The proof of the theorem is complete.
Remark 2: It follows from Theorem 2 that the state estimation error enters the closed ball
e : ‖e‖ ≤ κ(ε) after a finite time Tf (ε). It is easy to verify that
limε→0+
Tf (ε) =
∞ if V (t0) 6= 0
0 if V (t0) = 0,
because limε→0+ T (ε) = 0 and limε→0+ R+ = 0.
Moreover, the radius of the above closed ball can be adjusted by the design parameter ε and
because limε→0+ κ(ε) = 0, the state estimation error e converges to the origin as ε goes to zero.
Corollary 2: The hyperplane, (e, ζ) : σ = F a(Cae + Dζ) = 0, is invariant in the (e, ζ)-
space and is reached in finite time for sufficiently large η.
August 22, 2008 DRAFT

18
Proof: For t ≥ t0 + Tf (ε), it follows from (36) that
σ>σ = σ>(F aCae + F aDζ
)
= σ>(
F aCa(A−LaCa)e− F aCaLaDζ − F aCaB2u2
− F aCaB2Ea(yh, ya, η) +1
εF aDAcζ + F aDB1f(x,u2)
)
≤ ‖F aCa(A−LaCa)‖‖e‖‖σ‖+ ‖F aCaLa‖‖D‖‖ζ‖‖σ‖+ σ>(B2P aB2)u2
− ησ>(B2P aB2)σ
‖σ‖ +1
ε‖F aAc‖‖D‖‖ζ‖‖σ‖+ ‖F aB1‖‖f(x,u2)‖‖σ‖
≤ κ(ε)‖F aCa(A−LaCa)‖‖σ‖+ βε‖F aCaLa‖‖σ‖+ λmax(B>2 P aB2)‖u2‖‖σ‖
− ηλmin(B>2 P aB2)‖σ‖+ β‖F aAc‖‖σ‖+ β1‖F aB1‖‖σ‖
= −(
η − κ3 + κ4 + κ5 + κ6 + κ7
λmin(B>2 P aB2)
)λmin(B
>2 P aB2)‖σ‖, (42)
where κ3 = κ(ε)‖F aCa(A − LaCa)‖, κ4 = βε‖F aCaLa‖, κ5 = ρλmax(B>2 P aB2), κ6 =
β‖F aAc‖ and κ7 = ‖F aB1‖‖f(x, u2)‖. It follows from (42) that if we choose η such that
η ≥ κ3 + κ4 + κ5 + κ6 + κ7
λmin(B>2 P aB2)
+ ε,
where ε is a small positive constant, then
σ>σ ≤ −ε‖σ‖, (43)
which implies the above hyperplane is invariant. On the other hand, it can be shown that the
sliding surface will be reached in finite time using the same arguments as in the proof of
Corollary 1. This concludes the proof of the corollary.
C. Unknown Input Reconstruction
Our objective in this subsection is to show that we can use the proposed architecture to
estimate the unknown input u2. We will show that
u2 ≈ −Ea(ysh, ya, η), (44)
after a finite time for sufficiently small ε. We proceed as follows. First, by Corollary 2, we note
that the manifold (e, ζ) : σ = 0 is invariant and is reached after a finite time, and therefore
σ = F aCa(A−LaCa)e− F aCaLaDζ − F aCaB2u2
− F aCaB2Ea(ysh, ya, η) + F aDζ = 0. (45)
August 22, 2008 DRAFT

19
Substituting (15) into (45) and performing simple manipulations, we obtain
u2 = −Ea(ysh, ya, η)+
(B>
2 P aB2
)−1(F aCa(A−LaCa)e− F aCaLaDζ + F aDζ
). (46)
We thenshow that for sufficiently small ε, ‖e(t)‖, ‖ζ(t)‖ and ‖ζ‖ become negligible after a
finite time, which result in (44).
By Proposition 1, we have ‖ζ(t)‖ ≤ βε for t ≥ t0 + T (ε). By Theorem 2, we have ‖e(t)‖ ≤κ(ε) for t ≥ t0 + Tf (ε), where limε→0+ κ(ε) = 0. Thus, it remains to show that, for sufficiently
small ε, ‖ζ(t)‖ becomes negligible after a finite time. In what follows, we perform preliminary
manipulations before formally proceeding with the proof. Recall that ζ = [ζ>1 · · · ζ>p ]>. Thus,
we only need to prove that, for sufficiently small ε, ‖ζi(t)‖, i = 1, . . . , p, becomes negligible
after a finite time. We first rewrite (32) as
ζi(t) =1
εAciζi(t) + bi1fi(x(t),u2(t))
=1
εAciζi(t) + vi(t), (47)
where vi(t) = bi1fi(x(t),u2(t)). Because x(t) and u2(t) are bounded, it follows from (28) that
fi(x(t), u2(t)) is bounded. Thus, vi(t) is a bounded measurable function. It is well known the
the solution to (47) has the form
ζi(t) = exp
(1
εAci(t− t0)
)ζi(t0) +
∫ t
t0
exp
(1
εAci(t− s)
)vi(s)ds. (48)
Performing a change of variables in the integral of (48) by z = (t− s)/ε, we obtain
ζi(t) = exp
(1
εAci(t− t0)
)ζi(t0) + ε
∫ (t−t0)/ε
0
exp(Aciz
)vi(t− εz)dz. (49)
To proceed, two notions regarding the function vi(t) are defined.
Definition 1: A function vi(t) is left-continuous if limε→0+ vi(t− ε) = vi(t) for all t.
Definition 2: A function vi(t) defined on S ⊂ R is weakly uniformly continuous if for
every ν > 0, there exists a δ > 0 such that for each interval Ω ⊂ S with length less than δ,
‖vi(s)− vi(t)‖ < ν for s, t ∈ Ω.
Remark 3: A function with simple jump discontinuities, for example, a square wave, can
always be made left-continuous by changing the function values at the points of discontinuity.
Note that a uniformly continuous function is weakly uniformly continuous. However, a weakly
uniformly continuous function is not necessarily uniformly continuous. The square wave on
August 22, 2008 DRAFT

20
the complement of its switching points is an example of a function that is weakly uniformly
continuous but not uniformly continuous. If S is connected, then two notions of uniformly
continuity are equivalent.
In the following, we use S1 +S2, where S1, S2 ⊂ R, to denote the set s1 + s2 : s1 ∈ S1, s2 ∈S2. If S1 or S2 is empty, then S1 + S2 is defined to be empty.
Theorem 3: Consider the dynamics given by (47), where Aci is Hurwitz and vi(t) is bounded.
Let J denote the set of points at which vi(t) is discontinuous and let τ > t0 > 0. If vi(t) is
left-continuous, then limε→0+ ζi(t) = 0 for each t > t0 ≥ 0. Moreover, if vi(t) is also weakly
uniformly continuous on [τ, ∞)\J , then the convergence of ζi(t) to 0 as ε → 0+ is uniform
on [τ, ∞)\(J + (0, ξ)) for each ξ > 0. In particular, if vi(t) is uniformly continuous, then the
convergence is uniform on [τ, ∞).
Proof: It follows from (49) that
ζi(t)
ε= exp
(1
εAci(t− t0)
)ζi(t0)
ε+
∫ (t−t0)/ε
0
exp(Aciz
)vi(t− εz)dz. (50)
Note that the matrix Aci is Hurwitz. Let −λ, λ > 0, denote the maximum of the real parts of
its eigenvalues. The first term on the right hand side of (50) satisfies∥∥∥∥exp
(1
εAci(t− t0)
)ζi(t0)
ε
∥∥∥∥ ≤M1
ε‖ζi(t0)‖ exp
(−1
ελ(t− t0)
), (51)
because ∥∥∥∥exp
(1
εAci(t− t0)
)∥∥∥∥ ≤ M1 exp
(−1
ελ(t− t0)
),
for some M1 > 0. Because the initial conditions for the high-gain observers are always bounded,
there exists M2 > 0 such that
‖ζi(t0)‖ ≤M2
εγi−1.
Substituting the above into (51), we obtain∥∥∥∥exp
(1
εAci(t− t0)
)ζi(t0)
ε
∥∥∥∥ ≤M1M2
εγiexp
(−1
ελ(t− t0)
). (52)
By calculus, for each t > t0 ≥ 0, we have
limε→0+
M1M2
εγiexp
(−1
ελ(t− t0)
)= 0,
and thus,
limε→0+
exp
(1
εAci(t− t0)
)ζi(t0)
ε= 0. (53)
August 22, 2008 DRAFT

21
We next consider the second term on the right hand side of (50). Let
gi(z) = exp(Aciz
)vi(t− εz)I[0, (t−t0)/ε)(z),
where I[0, (t−t0)/ε)(z) denotes the indicator function for the interval [0, (t− t0)/ε). Observer that
for each z ≥ 0, if vi(t) is left-continuous, then
limε→0+
gi(z) = exp(Aciz
)vi(t).
Because vi(t) is bounded, there exists M3 > 0 such that ‖vi(t)‖ ≤ M3 for all t > t0. Thus, for
each z ≥ 0 and ε ∈ (0, 1),
‖gi(z)‖ ≤ M1M3 exp(−λz).
Because λ > 0, the function exp(−λz) is integrable on [0, ∞). Then we can thus apply
Lebesgue’s dominated convergence theorem [34, page 45] (to each component) such that for
each t > t0 ≥ 0,
limε→0+
∫ (t−t0)/ε
0
exp(Aciz
)vi(t− εz)dz = lim
ε→0+
∫ ∞
0
gi(z)dz
=
∫ ∞
0
exp(Aciz
)vi(t)dz
=
(∫ ∞
0
exp(Aciz
)dz
)vi(t)
= A−1ci
(limz→∞
exp(Aciz
)− Iγi
)vi(t)
= −A−1ci vi(t). (54)
We have limz→∞ exp(Aciz
)= 0 because Aci is Hurwitz. Therefore, it follows from (50), (53)
and (54) that
limε→0+
ζi(t)
ε= −A
−1ci vi(t). (55)
Combining (47) and (55), we conclude that
limε→0+
ζi(t) = Aci limε→0+
ζi(t)
ε+ vi(t) = 0
for each t > t0 ≥ 0.
Now we consider the case when vi(t) is also weakly uniformly continues on [τ, ∞)\J .
Let ν > 0 and τ > t0 > 0. We can use (50) to estimate the difference between ζi(t)/ε and
−A−1ci vi(t). For t ≥ τ , it follows from (52) that there exists a constant µ1 ∈ (0, 1) such that∥∥∥∥exp
(1
εAci(t− t0)
)ζi(t0)
ε
∥∥∥∥ ≤ν
2
August 22, 2008 DRAFT

22
for ε ∈ (0, µ1). We next analyze the difference between the second term on the right hand side
of (50) and −A−1ci vi(t). Let t ≥ τ . Then we have
∥∥∥∥∥∫ (t−t0)/ε
0
exp(Aciz
)vi(t− εz)dz + A
−1ci vi(t)
∥∥∥∥∥
=
∥∥∥∥∥∫ (t−t0)/ε
0
exp(Aciz
)[vi(t− εz)− vi(t)]dz
+
∫ (t−t0)/ε
0
exp(Aciz
)vi(t)dz + A
−1ci vi(t)
∥∥∥∥∥
≤ M1
∫ (t−t0)/ε
0
exp (−λz) ‖vi(t− εz)− vi(t)‖dz
+
∥∥∥∥∥∫ (t−t0)/ε
0
exp(Aciz
)vi(t)dz + A
−1ci vi(t)
∥∥∥∥∥ .
We analyze the terms in the above sum separately.
Let S = [τ, ∞)\(J + (0, ξ)). The set S is closed and it may be empty. For each t ∈ S, the
distance from t to the nearest point of discontinuity less than t is at least ξ since all points with
distance less than ξ to the right of a point of discontinuity are removed. Note that it is possible
for S to contain a point of discontinuity.
Let t ∈ S. By assumption, vi(t) is weakly uniformly continuous on [τ, ∞)\J . Because
(t − ξ, t) ⊂ [τ, ∞)\J , we can choose δ, independent of t, such that 0 < δ < ξ and ‖vi(s) −vi(w)‖ ≤ λν/(8M1) for s, w ∈ (t − δ, t). Because vi(t) is left-continuous, we conclude, by
letting w → t−, that ‖v(s)− v(t)‖ ≤ λν/(8M1) for s ∈ (t− δ, t]. Then we have
M1
∫ (t−t0)/ε
0
exp (−λz) ‖vi(t− εz)− vi(t)‖dz
= M1
(∫ δ/ε
0
+
∫ (t−t0)/ε
δ/ε
exp (−λz) ‖vi(t− εz)− vi(t)‖dz
)
<λν
8
∫ δ/ε
0
exp (−λz) dz + 2M1M3
∫ (t−t0)/ε
δ/ε
exp (−λz) dz
<λν
8
∫ ∞
0
exp (−λz) dz + 2M1M3
∫ ∞
δ/ε
exp (−λz) dz
=ν
8+
2M1M3
λexp
(−λδ
ε
).
August 22, 2008 DRAFT

23
Choose µ2 ∈ (0, 1) such that2M1M3
λexp
(−λδ
ε
)≤ ν
8
for ε ∈ (0, µ2). It follows that for t ∈ S and ε ∈ (0, µ2),
M1
∫ (t−t0)/ε
0
exp (−λz) ‖vi(t− εz)− vi(t)‖dz ≤ ν
4.
On the other hand, we have∥∥∥∥∥∫ (t−t0)/ε
0
exp(Aciz
)vi(t)dz + A
−1ci vi(t)
∥∥∥∥∥
=
∥∥∥∥A−1ci
[exp
(1
εAci(t− t0)
)− Iγi
]vi(t) + A
−1ci vi(t)
∥∥∥∥
=∥∥∥A
−1ci
∥∥∥∥∥∥∥exp
(1
εAci(t− t0)
)vi(t)
∥∥∥∥
≤ M1M3
∥∥∥A−1ci
∥∥∥ exp
(−λ(t− t0)
ε
)
≤ M1M3
∥∥∥A−1ci
∥∥∥ exp
(−λ(τ − t0)
ε
),
because λ > 0, ε > 0 and t ≥ τ . Choose µ3 ∈ (0, 1) such that
M1M3
∥∥∥A−1ci
∥∥∥ exp
(−λ(τ − t0)
ε
)<
ν
4
for ε ∈ (0, µ3). Let µ = minµ1, µ2, µ3. Then, combining the above inequalities, we conclude
that for t ∈ S and ε ∈ (0, µ), ∥∥∥∥ζi(t)
ε+ A
−1ci vi(t)
∥∥∥∥ ≤ ν,
which implies that ζi(t)/ε converges uniformly to −A−1ci vi(t) on S. The uniform convergence
of ζi(t) to 0 on [τ, ∞)\(J + (0, ξ)) follows immediately.
If vi(t) is uniformly continuous, then J is empty which implies that J + (0, ξ) is empty.
Thus, it follows that the convergence of ζi(t) to 0 is uniform on [τ, ∞) and the proof of the
theorem is complete.
The estimation of the unknown inputs illustrated in Section V will show that one cannot expect
uniform convergence in an immediate neighborhood of a jump discontinuity and a small interval
to the right of such a discontinuity must be excised to guarantee uniform convergence. On the
other hand, the above theorem does not hold if the function vi(t) is only weakly uniformly
continuous on [τ, T ]\J or uniformly continuous on [τ, T ] for T > τ . For example, if the
August 22, 2008 DRAFT

24
unknown input u2(t) contains signals of the form sin(t2), then vi(t) is only uniformly continuous
on [τ, T ] for T > τ . Thus, we have the following local version of Theorem 3.
Corollary 3: Consider the dynamics given by (47), where Aci is Hurwitz and vi(t) is bounded.
Let J denote the set of discontinuities of vi(t) and let 0 < t0 < τ < T . Suppose vi(t) is left-
continuous and weakly uniformly continuous on [τ, T ]\J (or uniformly continuous on [τ, T ]).
Then for each ξ > 0, the convergence of ζi(t) to 0 as ε → 0+ is uniform on [τ, T ]\(J +(0, ξ))
(or [τ, T ]).
V. NUMERICAL EXAMPLES
In this section, we illustrate the effectiveness of our proposed high-gain approximate differen-
tiator based sliding-mode observer with two numerical examples. Our simulations demonstrate
that its performance is quite similar to that of the high-order sliding-mode exact differentiator
based sliding-mode observer. Due to lack of space, we only show simulations with the high-gain
approximate differentiator based sliding-mode observer.
Example 1: We first consider a linear time invariant system (1) determined by
A =
0 1 0 0 0
0 0 1 0 0
0 0 0 1 0
0 0 0 0 1
−1 −5 −10 −10 −5
, B1 = B2 =
0 0
0 0
0 −1
1 0
0 0
,
C =
1 0 0 0 0
0 0 0 1 0
.
The initial condition is x(0) = [0.5 0.5 0.5 −0.5 −0.5]>, and the known input u1 is set to be
zero vector. The unknown input u2 consists of a square wave with amplitude 1 and frequency
1Hz, and a sawtooth signal with amplitude 2 and frequency 1Hz.
It is easy to check that for this system rank(CB2) 6= rank B2 because c1B2 = 0. Thus, we
choose γ1 = r1 = 3 such that
Ca =
c1
c1A
c1A2
c2
=
1 0 0 0 0
0 1 0 0 0
0 0 1 0 0
0 0 0 1 0
August 22, 2008 DRAFT
25
0 2 4 6 8 10−1.5
−1
−0.5
0
0.5
1
1.5
time (sec)
y12
y12
estimate
0 2 4 6 8 10−1.5
−1
−0.5
0
0.5
1
1.5
time (sec)
y13
y13
estimate
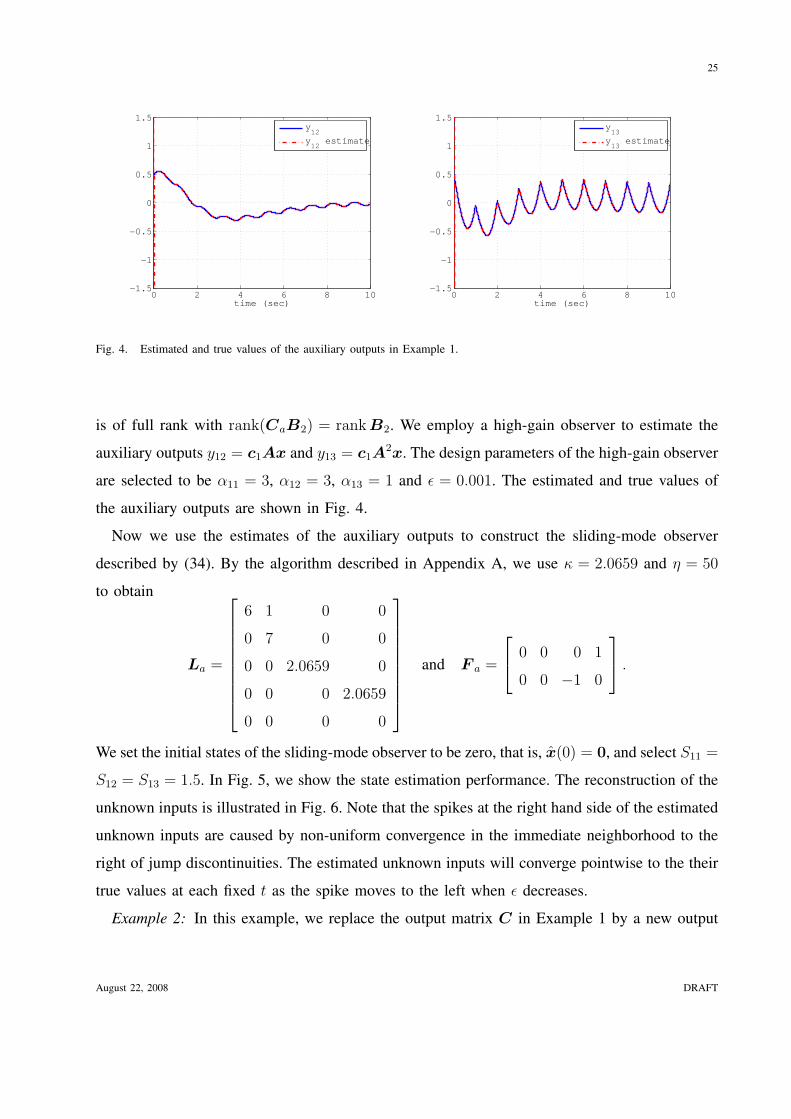
Fig. 4. Estimated and true values of the auxiliary outputs in Example 1.
is of full rank with rank(CaB2) = rank B2. We employ a high-gain observer to estimate the
auxiliary outputs y12 = c1Ax and y13 = c1A2x. The design parameters of the high-gain observer
are selected to be α11 = 3, α12 = 3, α13 = 1 and ε = 0.001. The estimated and true values of
the auxiliary outputs are shown in Fig. 4.
Now we use the estimates of the auxiliary outputs to construct the sliding-mode observer
described by (34). By the algorithm described in Appendix A, we use κ = 2.0659 and η = 50
to obtain
La =
6 1 0 0
0 7 0 0
0 0 2.0659 0
0 0 0 2.0659
0 0 0 0
and F a =
0 0 0 1
0 0 −1 0
.
We set the initial states of the sliding-mode observer to be zero, that is, x(0) = 0, and select S11 =
S12 = S13 = 1.5. In Fig. 5, we show the state estimation performance. The reconstruction of the
unknown inputs is illustrated in Fig. 6. Note that the spikes at the right hand side of the estimated
unknown inputs are caused by non-uniform convergence in the immediate neighborhood to the
right of jump discontinuities. The estimated unknown inputs will converge pointwise to the their
true values at each fixed t as the spike moves to the left when ε decreases.
Example 2: In this example, we replace the output matrix C in Example 1 by a new output
August 22, 2008 DRAFT

26
0 2 4 6 8 10−0.5
0
0.5
1
1.5
time (sec)
x1
x1 estimate
0 2 4 6 8 10−0.5
0
0.5
1
time (sec)
x2
x2 estimate
0 2 4 6 8 10−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
time (sec)
x3
x3 estimate
0 2 4 6 8 10−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
time (sec)
x4
x4 estimate
0 2 4 6 8 10−1.5
−1
−0.5
0
0.5
1
1.5
2
time (sec)
x5
x5 estimate
Fig. 5. Real and estimated system states in Example 1.
August 22, 2008 DRAFT

27
0 2 4 6 8 10−3
−2
−1
0
1
2
3
time (sec)
u21
u21
estimate
0 2 4 6 8 10−4
−3
−2
−1
0
1
2
3
4
time (sec)
u22
u22
estimate
Fig. 6. Unknown input reconstruction in Example 1.
matrix
C =
2 1 0 0 0
−2 1 0 0 1
.
We keep the same initial condition, known and unknown inputs as in Example 1. With the new
output matrix, we have c1B2 = c2B2 = 0. Thus, we choose γ1 = r1 = 2 and γ2 = r2 = 2 such
that
Ca
c1
c1A
c2
c2A
=
2 1 0 0 0
0 2 1 0 0
−2 1 0 0 1
−1 −7 −9 −10 −5
,
is of full rank with rank(CaB2) = rank B2. We employ two separate high-gain observers to
estimate the auxiliary outputs y12 = c1Ax and y22 = c2Ax, respectively. The design parameters
of high-gain observers are chosen to be α11 = 2, α12 = 1, α21 = 2, α22 = 1 and ε = 0.001. The
estimated and true values of the auxiliary outputs are shown in Fig. 7.
Following the algorithm described in Appendix A with κ = 158.3395 and η = 100, we obtain
La =
1.9276 0 −1.3947 0
2.5626 0 2.2961 0
−5.1252 10 −4.5923 0
2.2264 −9 1.9168 −1
0.7994 0 1.4967 0
and F a =
0 0 0 −10
0 −1 0 9
.
August 22, 2008 DRAFT

28
0 2 4 6 8 10−1.5
−1
−0.5
0
0.5
1
1.5
time (sec)
y12
y12
estimate
0 2 4 6 8 10−6
−4
−2
0
2
4
6
time (sec)
y2
y2 estimate
Fig. 7. Estimated and true values of the auxiliary outputs in Example 2.
0 2 4 6 8 10−3
−2
−1
0
1
2
3
time (sec)
u21
u21
estimate
0 2 4 6 8 10−4
−3
−2
−1
0
1
2
3
4
time (sec)
u22
u22
estimate
Fig. 8. Unknown input reconstruction in Example 2.
The initial states of the sliding-mode observer is the same as in Example 1, S11 = S12 = S21 = 3
and S22 = 8. The state estimation performance is similar to that of Example 1 as shown in Fig. 5.
The reconstruction of the unknown inputs is illustrated in Fig. 8.
VI. CONCLUSIONS
The main contributions of this paper are novel sliding-mode observer architectures for state
estimation and unknown input reconstruction for systems with unknown inputs. Rigorous proofs
of the convergence of the state estimation error and the unknown input reconstruction are
provided. The proposed architectures consist of dynamical systems for generating auxiliary
August 22, 2008 DRAFT

29
outputs that are used by a sliding-mode observer to estimate the states and reconstruct the
unknown inputs. Two methods for generating auxiliary outputs are analyzed: high-order sliding-
mode exact differentiator and high-gain approximate differentiator. The first method yields
asymptotic state estimation, whereas the second method achieves uniform ultimate boundedness
of the state estimation error. The high-gain approximate differentiators result in a simpler overall
observer architecture than the high-order sliding-mode exact differentiator. In addition, it is
shown that the high-gain differentiator based observer performs comparably to the high-order
differentiator based observer.
APPENDIX A
SLIDING-MODE OBSERVER DESIGN ALGORITHM
1) Check if the conditions (2) and (3) are satisfied. If not, the sliding-mode observer in (4)
cannot be constructed.
2) Find the nonsingular matrices T ∈ Rn×n and S ∈ Rp×p such that the triple (A,B2,C) is
transformed into the form,
A = TAT−1 =
A11 A12
A21 A22
,
B2 = TB2 =
B21
O(n−m2)×m2
,
C = SCT−1 =
Im2 Om2×(p−m2)
O(p−m2)×m2 C22
,
where A11 ∈ Rm2×m2 , A22 ∈ R(n−m2)×(n−m2), B21 ∈ Rm2×m2 and C22 ∈ R(p−m2)×(p−m2);
3) Choose L22 ∈ R(n−m2)×(p−m2) such that A22 −L22C22 is Hurwitz. Solve P 22 for
(A22 −L22C22)> P 22 + P 22 (A22 −L22C22) = −2Q22,
where Q22 is a symmetric positive definite matrix.
4) Choose κ such that
κ >1
2λmax
(A>
11 + A11 +(A12 + A>
21P 22
)Q−1
22
(A>
12 + P 22A21
));
August 22, 2008 DRAFT

30
5) Construct P , F and L as
P =
Im2 Om2×(p−m2)
O(p−m2)×m2 P 22
,
F =[
B>21
Om2×(p−m2)
],
L =
κIm2 Om2×(p−m2)
O(n−m2)×m2 L22
,
and compute P = T>P T , F = F S, L = T−1LS;
6) Construct the sliding-mode observer (4).
APPENDIX B
PROOF OF PROPOSITION 1
The idea of this proof comes from [35]. Let P ci be the solution to the continuous Lyapunov
equation A>ciP ci + P ciAci = −2Qci for some Qci = Q>
ci > 0. Consider the Lyapunov function
candidate for t ≥ t0,
Vi =1
2ζ>i P ciζi. (56)
Evaluating the time derivative of Vi on the solutions of (32), yields
Vi = ζ>i P ci
(1
εAciζi + bi1fi(x,u2)
)
≤ −1
εζ>i Qciζi +
∥∥ζ>i P cibi1
∥∥ |fi(x,u2)| . (57)
Because x and u2 are bounded, it follows from (28) that |fi(x,u2)| ≤ βi1 for some βi1 > 0.
Taking into account the above and performing some manipulations on (57) gives
Vi = −1
εζ>i Qciζi + βi1
∥∥ζ>i P cibi1
∥∥
≤ −1
ελmin(Qci)‖ζi‖2 + βi1‖P cibi1‖‖ζi‖
≤ −1
ε
λmin(Qci)
λmax(P ci)λmax(P ci)‖ζi‖2 +
√2βi1‖P cibi1‖√
λmin(P ci)
√1
2λmin(P ci)‖ζi‖2
≤ −21
ε
λmin(Qci)
λmax(P ci)Vi +
√2βi1‖P cibi1‖√
λmin(P ci)
√Vi
= −µci
εVi −
√Vi
(µci
ε
√Vi − βi2
),
August 22, 2008 DRAFT

31
where
µci =λmin(Qci)
λmax(P ci), βi2 =
√2βi1‖P cibi1‖√
λmin(P ci).
It is easy to verify that as long as
Vi ≥(
βi2ε
µci
)2
= βi3ε2,
where βi3 = β2i2/µ
2ci, then
µci
ε
√Vi − βi2 ≥ 0.
Because the initial conditions for the high-gain observers are bounded and ε is a design parameter
such that 0 < ε < 1, it follows from (56) that
Vi(t0) ≤ βi4
ε2γi−2,
for some βi4 > 0.
If Vi(t0) > βi3ε2 and Vi(t) ≥ βi3ε
2 for t ≥ t0, then
Vi ≤ −µci
εVi,
and, hence, it follows from the comparison lemma that
Vi(t) ≤ exp(−µci
ε(t− t0)
)Vi(t0) ≤ βi4
ε2γi−2
(−µci
ε(t− t0)
).
Thus, we can find a finite time Ti(ε) such that Vi(t) ≤ βi3ε2 for t ≥ t0 + Ti(ε), where Ti(ε) is
the solution to the equation,
βi4
ε2γi−2exp
(−µci
εTi(ε)
)= βi3ε
2,
of the form,
Ti(ε) =ε
µci
ln
(βi4
βi3ε2γi
). (58)
It follows from (58) that limε→0+ Ti(ε) = 0. On the other hand, if Vi(t0) ≤ βi3ε2, then Vi(t) ≤
βi3ε2 for t ≥ t0. In such a case, we can choose Ti(ε) = 0. Therefore, there exists a finite
time Ti(ε) such that Vi(t) ≤ βi3ε2 for t ≥ t0 + Ti(ε) and limε→0+ Ti(ε) = 0. It follows that
‖ζ(t)‖ ≤ βiε for t ≥ t0 + Ti(ε), where βi =√
2βi3/λmin(P ci). Thus, we concludes the proof of
the proposition.
August 22, 2008 DRAFT

32
REFERENCES
[1] D. G. Luenberger, “Observers for multivariable systems,” IEEE Trans. Autom. Control, vol. AC-11, no. 2, pp. 190–197,
Apr. 1966.
[2] S. P. Bhattacharyya, “Observers design for linear systems with unknown inputs,” IEEE Trans. Autom. Control, vol. AC-23,
no. 3, pp. 483–484, Jun. 1978.
[3] P. Kudva, N. Viswanadham, and A. Ramakrishna, “Observers for linear systems with unknown inputs,” IEEE Trans. Autom.
Control, vol. AC-25, no. 1, pp. 113–115, Feb. 1980.
[4] F. Yang and R. W. Wilde, “Observers for linear systems with unknown inputs,” IEEE Trans. Autom. Control, vol. 33,
no. 7, pp. 166–170, Jul. 1988.
[5] M. Hou and P. M.uller, “Design of observers for linear systems with unknown inputs,” IEEE Trans. Autom. Control,
vol. 37, no. 6, pp. 871–875, Jun. 1992.
[6] M. Darouach, M. Zasadzinski, and S. Xu, “Full-order observers for linear systems with unknown inputs,” IEEE Trans.
Autom. Control, vol. 39, no. 3, pp. 606–609, Mar. 1994.
[7] M. Corless and J. Tu, “State and input estimation for a class of uncertain systems,” Automatica, vol. 34, no. 6, pp. 757–764,
1998.
[8] J. Chen and R. Patton, Robust model-based fault diagnosis for dynamical systems. Norwell, Massachusetts: Kluwer
Academic Publishers, 1999.
[9] J.-J. Slotine, J. K. Hedrick, and E. A. Misawa, “On sliding observers fro nonlinear systems,” ASME J. Dyn. System
Measurement Control, vol. 109, pp. 245–252, 1987.
[10] Y. Xiong and M. Saif, “Sliding mode observer for nonlinear uncertain systems,” IEEE Trans. Autom. Control, vol. 46,
no. 12, pp. 2012–2017, Dec. 2001.
[11] L. Fridman, Y. Shtessel, C. Edwards, and X. G. Yan, “Higher-order sliding-mode observer for state estimation and input
reconstruction in nonlinear systems,” Int. J. Robust Nonlinear Contr., vol. 18, no. 4-5, pp. 399–412, Mar. 2008.
[12] B. Walcott and S. H. Zak, “State observation of nonlinear uncertain dynamical systems,” IEEE Trans. Autom. Control,
vol. 32, no. 2, pp. 166–170, Feb. 1987.
[13] S. H. Zak and B. Walcott, “State observation of nonlinear control systems via the method of lyapunov,” in Deterministic
control of uncertain systems, A. S. I. Zinober, Ed. London, United Kingdom: Peter Peregrinus, 1990, pp. 333–350.
[14] V. Utkin, Sliding modes in control and optimization. Berlin: Springer, 1992.
[15] C. Edwards and S. K. Spurgeon, Sliding Mode Control: Theory and Applications. London, UK: Taylor and Francis Group,
1998.
[16] C. Edwards, S. K. Spurgeon, and R. J. Patton, “Sliding mode observers for fault detection and isolation,” Automatica,
vol. 36, pp. 541–553, 2000.
[17] S. Hui and S. H. Zak, “Observer design for systems with unknown inputs,” Int. J. Appl. Math. Comput. Sci, vol. 15, no. 4,
pp. 431–446, 2005.
[18] L. Fridman, A. Levant, and J. Davila, “Observation of linear systems with unknown inputs via higher order sliding modes,”
Int. J. Systems Science, vol. 38, no. 10, pp. 773–791, Oct. 2007.
[19] F. J. Bejarano, L. Fridman, and A. Poznyak, “Exact state esimation for linear systems with unknown inputs based on
hierarchical super twisting algorithm,” Automatica, vol. 17, no. 18, pp. 1734–1753, Mar. 2007.
[20] T. Floquet and J. P. Barbot, “A canonical form for the design of unknown input sliding mode observers,” in Advances in
August 22, 2008 DRAFT

33
Variable Structure and Sliding Mode Control, C. Edwards, E. F. Colet, and L. Fridman, Eds. Berlin: Springer, 2006, vol.
334.
[21] T. Floquet, C. Edwards, and S. K. Spurgeon, “On sliding mode observers for systems with unknown inputs,” Int. J. Adapt.
Control Signal Process., vol. 21, pp. 638–656, 2007.
[22] A. Levant, “Sliding order and sliding accuracy in sliding mode control,” Int. J. Contr., vol. 58, no. 6, pp. 1247–1263, 1993.
[23] ——, “Robsust exact differentiation via sliding mode technique,” Automatica, vol. 34, no. 3, pp. 379–384, 1998.
[24] F. Esfandiari and H. K. Khalil, “Output feedback stabilization of fully linearizable systems,” Int. J. Contr., vol. 56, pp.
1007–1037, Nov. 1992.
[25] A. Teel and L. Praly, “Tools for semiglobal stabilization by partial state and output feedback,” SIAM J. Control and
Optimization, vol. 33, pp. 1443–1488, 1995.
[26] H. K. Khalil, “Adaptive output feedback control of nonlinear systems represented by input-output models,” IEEE Trans.
Autom. Control, vol. 41, no. 2, pp. 177–188, Feb. 1996.
[27] S. Seshagiri and H. K. Khalil, “Output feedback control of nonlinear systems using RBF neural networks,” IEEE Trans.
Neural Netw., vol. 11, no. 1, pp. 69–79, Jan. 2000.
[28] S. Oh and H. K. Khalil, “Nonlinear output feedback tracking using high gain observer and variable structure control,”
Automatica, vol. 33, no. 10, pp. 1845–1856, Oct. 1997.
[29] A. J. Peixoto, H. Liu, R. R. Costa, and F. Lizarralde, “Global tracking sliding mode control for uncertain nonlinear systems
based on variable high gain observer,” in Proc. 46th IEEE. Conference of Decision and Control, New Orleans, LA, Dec.
2007, pp. 2041–2046.
[30] H. K. Khalil, “High gain observers in nonlinear feedback control,” in Lecture Notes in Control and Information Sciences.
Berlin: Springer-Verlag, 1999, vol. 244.
[31] J. P. Barbot, T. Boukhobza, and M. Djemai, “Sliding mode observer for triangular input form,” in Porc. 35th IEEE
Conference on Decision and Control, vol. 2, Kobe, Japan, Dec. 1996, pp. 1489–1490.
[32] C. Corduneanu, Principles of Differential and Integral Equations. Boston, Massachusetts: Allyn and Bacon, Inc., 1971.
[33] H. K. Khalil, Nonlinear Systems, 2nd ed. Upper Saddle River, NJ: Prentice Hall, 1996.
[34] R. G. Bartle, The Elements of Integration. New York, NY: John Wiley and Sons, 1966.
[35] N. A. Mahmoud and H. K. Khalil, “Asymptotic regulation of minimum phase nonlinear systems using output feedback,”
IEEE Trans. Autom. Control, vol. 41, no. 10, pp. 1402–1412, Oct. 1996.
August 22, 2008 DRAFT