1 multidisciplinary aircraft conceptual design optimisation using a hierarchical asynchronous...
Post on 21-Dec-2015
220 views
TRANSCRIPT

1
Multidisciplinary Aircraft Conceptual Design
Optimisation Using a Hierarchical Asynchronous
Parallel Evolutionary Algorithm (HAPEA)
Presented at the Sixth ADAPTIVE COMPUTING IN DESIGN AND MANUFACTURE(ACDM 2004)APRIL 20th - 22nd, 2004 at ENGINEERS HOUSE, CLIFTON, BRISTOL, UK
University of Sydney
L. F. Gonzalez
E. J. Whitney
K. Srinivas
K.C Wong
Pole Scientifique - Dassault Aviation-
J. Périaux

2
Overview
PART 1 Multi-Objective Problems
PART 2
Test Cases and Applications .
Research in Evolution Algorithms for Aeronautical Design Problems (EAs)
PART 3
3
Multi-Criteria Problems
Aeronautical design problems normally require a simultaneous optimisation of conflicting objectives and associated number of constraints. They occur when two or more objectives that cannot be combined rationally. For example:
Drag at two different values of lift.
Drag and thickness.
Pitching moment and maximum lift.

4
…..Multi--Criteria Optimisation
Nixi
f ,...1)(
A multi-criteria optimisation problem can be formulated as: Minimise:
Subject to constraints:
Different Approaches: Traditional aggregating functions, and Pareto and Nash.
2 solution thedominates
1 solution thecase thisIn*
)2
()1
(
: if2
a vector thanlesspartially said is 1
a vector problem, onminimisatia For
xx
xi
fxi
fi
xx
Mkxk
hMjxj
g ,....10)(,....10)(

5
Pareto Optimality
Formally, the Pareto optimal set can be defined as the set of solutions that are non-dominated with respect to all other points in the search space, or that they dominate every other solution in the search space except fellow members of the Pareto optimal set. For two solutions x and y (in minimisation form):
, dominates : : 1...
, nondominated w.r.t. : : 1...
, dominates x : : 1...
i i i
i i i
i i i
rel x y x y if f x f y M
rel x y x y if f x l f y M
rel x y y if f x f y M
For a problem in M objectives, this is called the 'relationship' operator. In practice we compute an approximation to the continuous set, by assembling .or each player, as can be seen in Figure 2, whereby information is exchanged
.
1 2 3, , .....* * * *ParetoSet x x x x
6
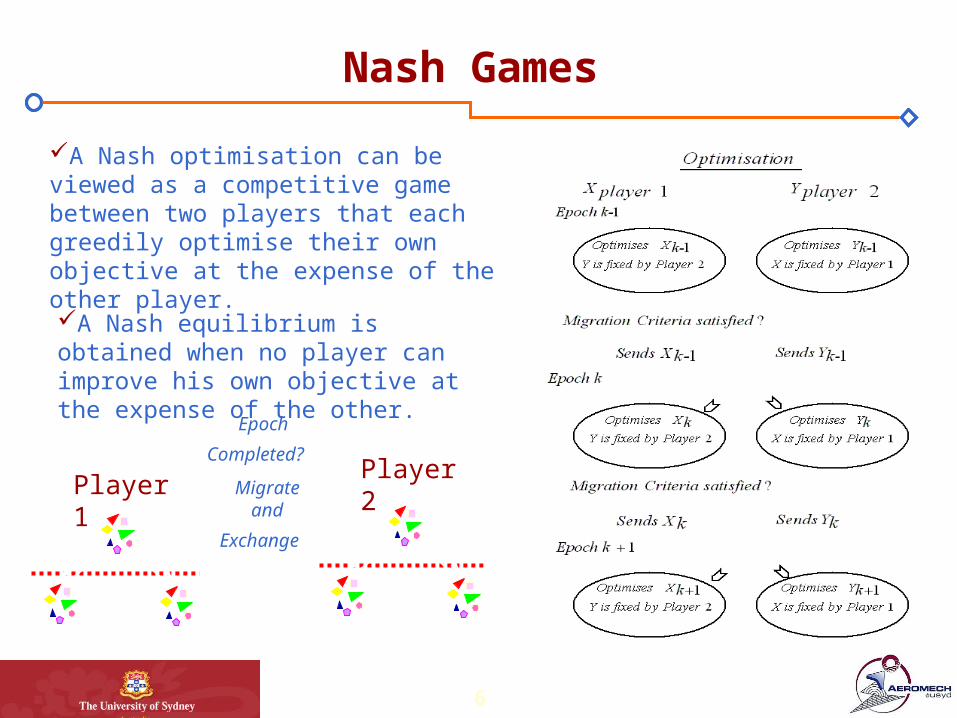
Nash Games
A Nash optimisation can be viewed as a competitive game between two players that each greedily optimise their own objective at the expense of the other player.
A Nash equilibrium is obtained when no player can improve his own objective at the expense of the other.
Player 1
Player 2
Epoch
Completed? Migrate
and
Exchange
7
The Problem…
Problems in aeronautical design optimisation: Traditional optimisation methods will fail to find the real answer in
most real engineering applications. Fitness functions of interest are generally multimodal with a
number of local minima. Sometimes the optimum shape/s is not obvious to the designer. The fitness function will involve some numerical noise.
Most aerodynamic design problems will need to be stated in multi-objective form.
Modern aeronautical design uses CFD (Computational Fluid Dynamics) and FEA almost exclusively.
CFD has matured enough to use for preliminary design and optimisation.
The internal workings of validated in-house solvers are essentially inaccessible from a modification point of view (they are black-boxes).
8
… The Solution…. Why Evolution?
Techniques such as Evolution Algorithms can explore large variations in designs. They also handle errors and deceptive sub-optimal solutions with aplomb.
They are extremely easy to parallelise, significantly reducing computation time.
They can provide optimal solutions for single and multi-objective problems.
EAs successively map multiple populations of points, allowing solution diversity.
They are capable of finding a number of solutions in a Pareto set or calculating a robust Nash game.

9
What Are Evolution Algorithms?
Crossover Mutation
Fittest
Evolution
Computers perform this evolution process as a mathematical simplification.
EAs move populations of solutions, rather than ‘cut-and-try’ one to another.
EAs applied to sciences, arts and engineering. Aerofoil and wing design, crew scheduling, control loops,etc.
Based on the Darwinian theory of evolution Populations of individuals evolve and reproduce by means of mutation and crossover operators and compete in a set environment for survival of the fittest.
10
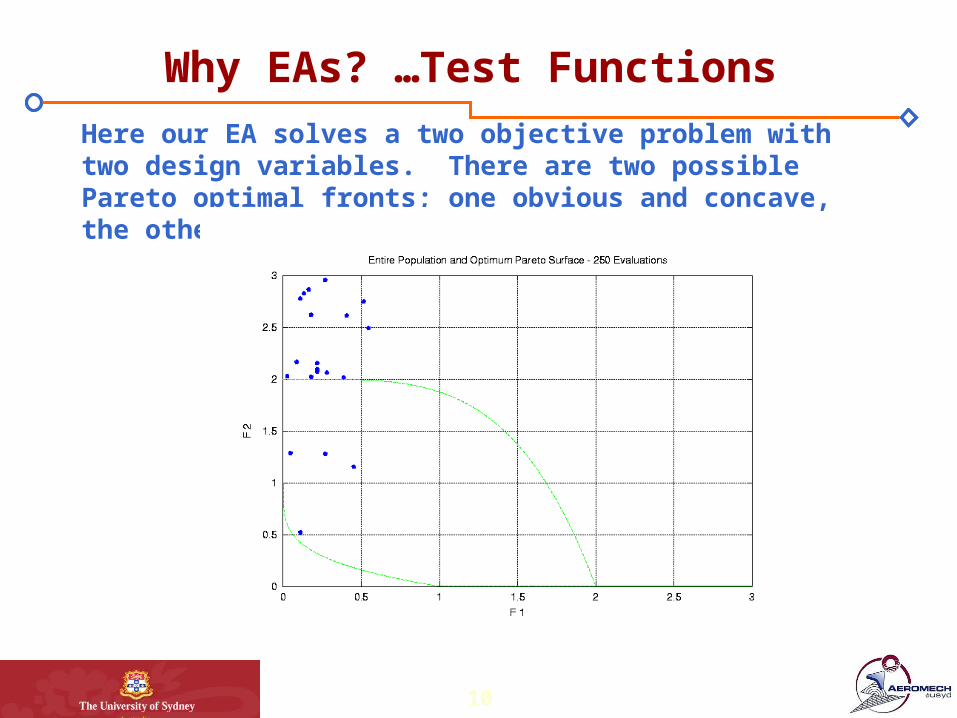
Why EAs? …Test Functions
Here our EA solves a two objective problem with two design variables. There are two possible Pareto optimal fronts; one obvious and concave, the other deceptive and convex.

11
“The Central Difficulty”
Evolutionary techniques are … still … very … slow!
(Often involving hundreds or thousands of separate flow computations)
Therefore, we need to think about ways of speeding up the process…

12
Hierarchical Topology-Multiple Models
Model 1precise model
Model 2intermediate
model
Model 3approximate
model
Exploration
Exploitation We use a technique that finds optimum solutions by using many different models, that greatly accelerates the optimisation process.
Interactions of the layers: solutions go up and down the layers.
Time-consuming solvers only for the most promising solutions.
Asynchronous Parallel Computing
Evolution Algorithm Evaluator
Hierarchical Topology
Parallel Computing and Asynchronous Evaluation

Synchronous Evaluationdifferent speed
EvolutionStrategy
Synchromous Evaluator
1 population (n individuals)
1 population (n individuals)
Single population
Hierarchical populations
ES Sync
ES ES
ES ES ES ES
Sync
Sync
Sync Sync Sync Sync
Each population has to go through a fixed number of generations before migration can take place
Since migration is global, the different populations will have to wait for the slowest one before exchanging individuals
The whole population is passed to the evaluator.
All the individuals of a given generation need to be evaluated before proceeding to the next generation
Asynchronous Evaluationdifferent speed
EvolutionStrategy
Asynchromous Evaluator
1 individual
1 individual
Single population
Hierarchical populations
ES
ES ES
ES ES ES ES
Async
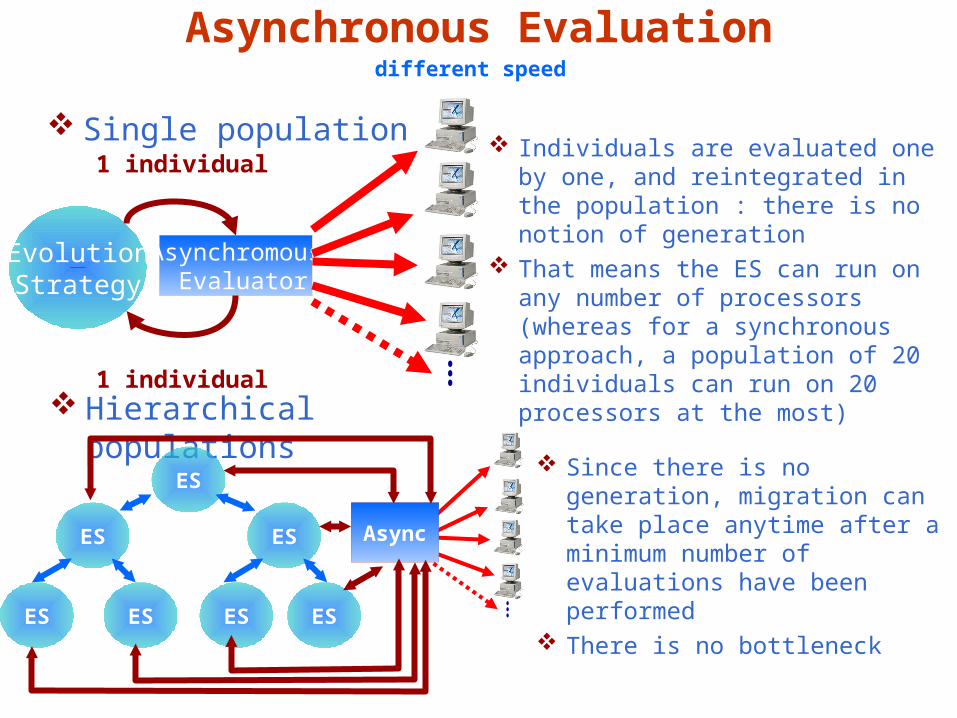
Since there is no generation, migration can take place anytime after a minimum number of evaluations have been performed
There is no bottleneck
Individuals are evaluated one by one, and reintegrated in the population : there is no notion of generation
That means the ES can run on any number of processors (whereas for a synchronous approach, a population of 20 individuals can run on 20 processors at the most)

15
Asynchronous Evaluation…
Fitness functions are computed asynchronously. Only one candidate solution is generated at a time, and only
one individual is incorporated at a time rather than an entire population at every generation as is traditional EAs.
Solutions can be generated and returned out of order.
No need for synchronicity no possible wait-time bottleneck. No need for the different processors to be of similar speed. Processors can be added or deleted dynamically during the
execution. There is no practical upper limit on the number of processors
we can use. All desktop computers in an organisation are fair game.

16
….Asynchronous Evaluation…
Offspring are not sent as a complete 'block' to the parallel machines. A candidate is generated at a time, and sent to any idle processor where it is
evaluated at its own speed. After evaluation return to optimiser and check if accepted for insertion into
the main population or rejected. New selector operator because offspring cannot now be compared one against
the other, or even against the main population due to the variable-time evaluation.
Recently evaluated offspring are compared to a previously established rolling-benchmark and if successful, we replace (according to some rule) a pre-existing individual in the population.
A separate evaluation buffer, which provides a statistical 'background check' on the comparative fitness of the solution. Buffer size 2 x PopSize
We compare it with the selection buffer by assembling at random a small subset called the tournament Q = [q1,q2,q3,…qn] and check that the individual is not dominated by any member of Q.
Q =1/2B (Strong selective pressure), Q =1/6B (weak selection pressure). Compare to past individuals (both accepted and rejected) -inserted or not If accepted us strategy for replacement replace-worst-always method in this
paper.
Generate candidate
Send to idle processor
If evaluation completed send back
to optimiser
Compare to a tournament and if successful replace
Assign fitness
Compare to accepted and rejected
individuals –insert into the population
17
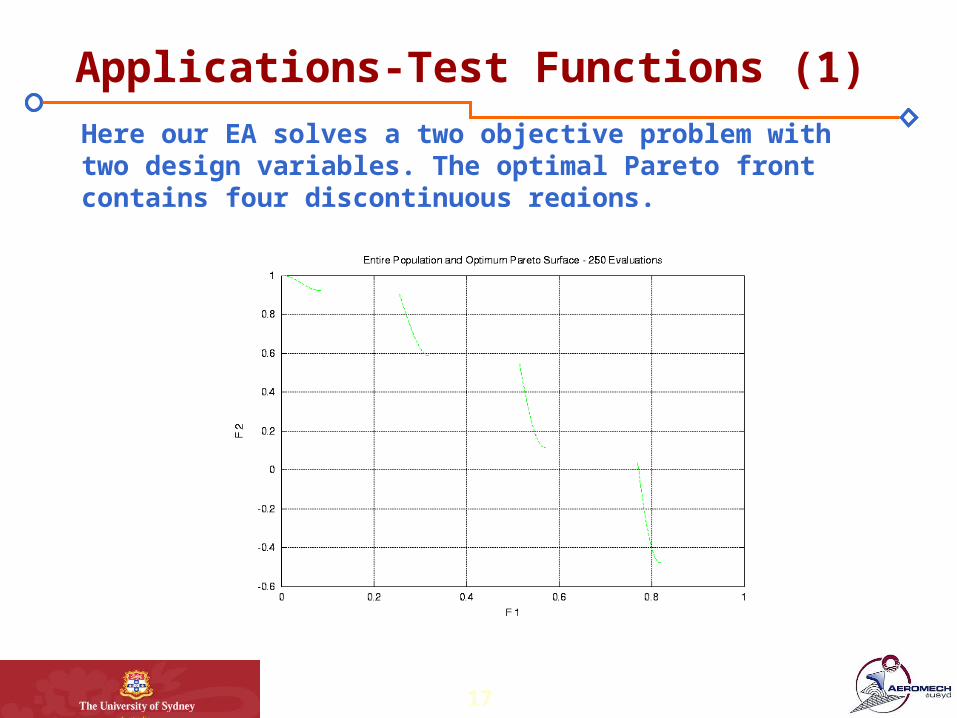
Applications-Test Functions (1)
Here our EA solves a two objective problem with two design variables. The optimal Pareto front contains four discontinuous regions.
18
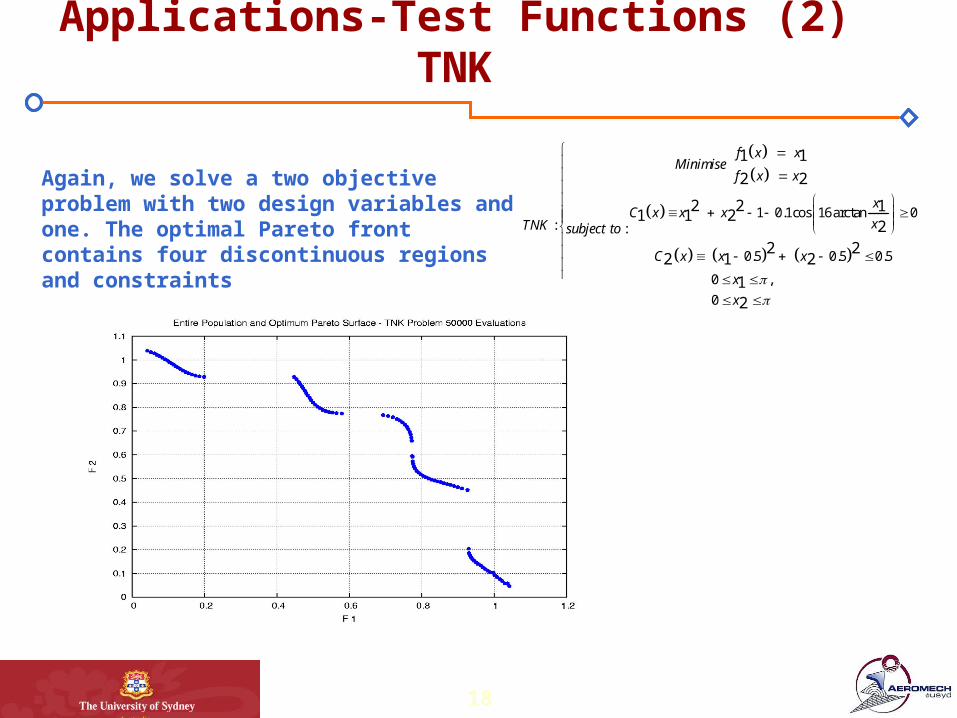
Applications-Test Functions (2) TNK
1 0.1cos 16arctan 0: :
0.5 0.5 0.5
0 ,
0
1 1
2 2
2 2 11 1 2
22 2
2 1 2
12
f x xMinimise
f x x
xC x x x
xTNK subject to
C x x x
x
x
Again, we solve a two objective problem with two design variables and one. The optimal Pareto front contains four discontinuous regions and constraints

19
Asynchronous Test: One Dimensional Nozzle
X-Distance
Ma
chN
um
be
r
0 0.5 10.4
0.6
0.8
1
1.2Target Mach Number
Generated Mach No.
Target Nozzle Shape
Generated Nozzlw Shape
Y-Nozzle half width

20
Synchronous, Single Population, Viscous model
Pop size = 207 processors
45mn

21
Asynchronous, Multiple Models, Viscous only
12mn
Pop size = 107 processors

22
CPU Times for HAPEA
Method CPU Time No of evaluations
Single Pop, Viscous, Traditional EA
45m 27s 12m 8s
2127 1137
Hierarchical Asynchronous
12m 6s 3m 58s
726 112

23
Real –world applications
Constrained aerofoil design for transonic transport aircraft 3% Drag reduction
UAV aerofoil design
-Drag minimisation for high-speed transit and loiter conditions.
-Drag minimisation for high-speed transit and takeoff conditions.
Exhaust nozzle design for minimum losses.

24
Real –world applications … (2)
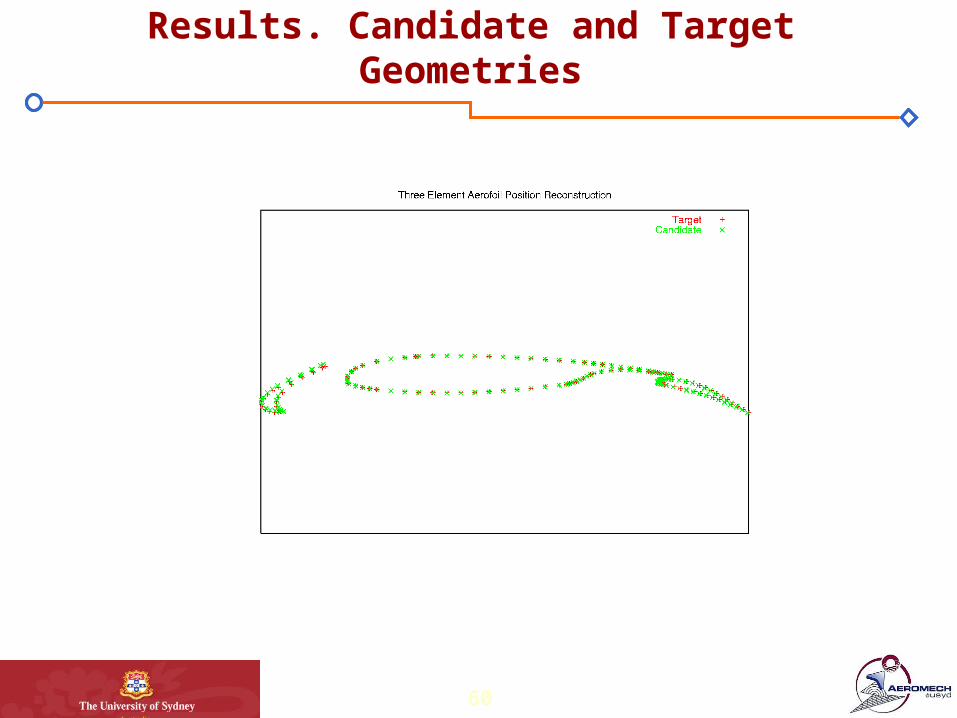
Three element aerofoil reconstruction from surface pressure data.
UCAV MDO Whole aircraft multidisciplinary design.Gross weight minimisation and cruise efficiency Maximisation. Coupling with NASA code FLOPS 2 % improvement in Takeoff GW and Cruise Efficiency
AF/A-18 Flutter model validation.

25
Case Studies
Multidisciplinary Aircraft Conceptual DesignCase Studies.

26
UCAV Conceptual Design.
Problem Definition: Find conceptual design parameters for a UCAV, to minimise two objectives:
Gross weight min(WG) Cruise efficiency min(1/[MCRUISE.L/DCRUISE])
We have six unknowns:
Lower Bound
Upper Bound
Aspect Ratio 3.1 5.3
Wing Area (sq ft) 600 1400
Wing Thickness 0.02 0.09
Wing Taper Ratio
0.15 0.55
Wing Sweep (deg)
22.0 47.0
Engine Thrust (lbf)
30500 50000

27
Mission Definition
Cruise 40000 ft, Mach 0.9, 400 nm
Landing
Release Payload 1800 Lbs
Maneuvers at Mach 0.9
Accelerate Mach 1.5, 500 nm
20000 ft
Engine Start and warm up
Taxi
Takeoff
Climb
Descend
Release Payload 1500 Lbs
Description Requirement
Range [R, Nm] 1000
Cruise Mach Number [Mcruise]
1.6
Cruise Altitude [hcruise, ft] 40000
Ultimate Load Factor [nult] 12
Takeoff Field Length [sto, ft] 7000

28
Solver
The FLOPS (FLight OPtimisation System) solver developed by L. A. (Arnie) McCullers, NASA Langley Research Center was used for evaluating the aircraft configurations.
FLOPS is a workstation based code with capabilities for conceptual and preliminary design of advanced concepts.
FLOPS is multidisciplinary in nature and contains several analysis modules including: weights, aerodynamics, engine cycle analysis, propulsion, mission performance, takeoff and landing, noise footprint, cost analysis, and program control.
FLOPS has capabilities for optimisation but in this case was used only for analysis.
Drag is computed using Empirical Drag Estimation Technique (EDET) - Different hierarchical models are being adapted for drag build up using higher fidelity models.
29
Two Approaches
Solved via :
Nash theory
and
Pareto Optimality.

30
Implementation
Nash Approach.
-Two hierarchical trees, with two levels, population size of 40.
Player 1
Player 2
Epoch
Completed? Migrate
and
Exchange
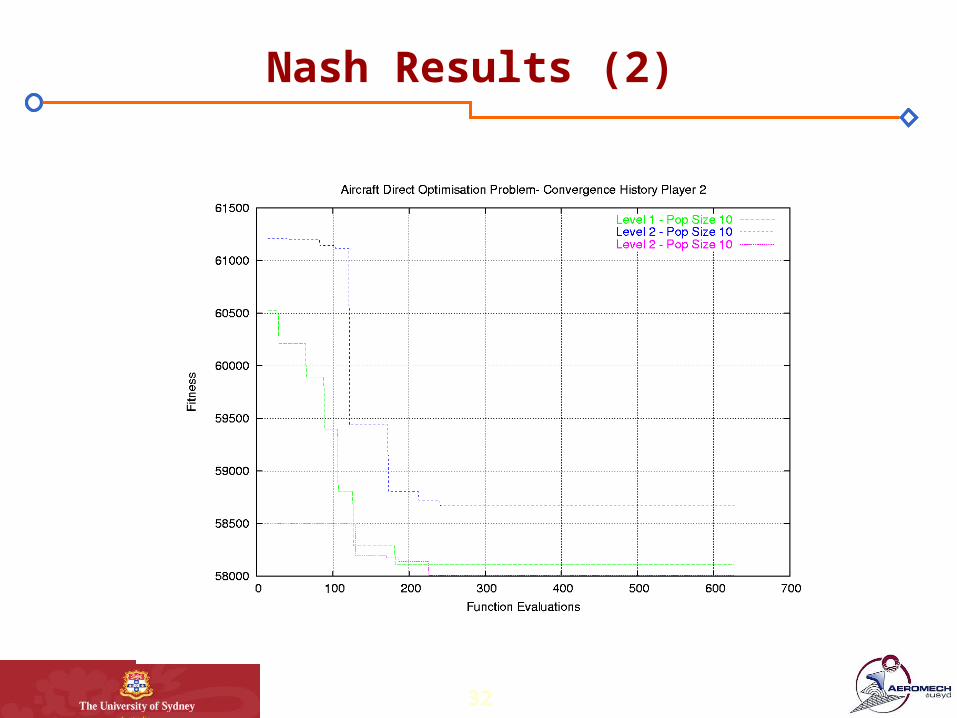
- Information exchanged (epoch) after 50 function evaluations. Variables split:-Player One: Aspect ratio, wing thickness and wing sweep; Maximises cruise efficiency.
-Player Two:Player Two: Wing area, engine thrust and wing taper; Minimises gross weight.
- Run for 600 function evaluations, but converged after 300.
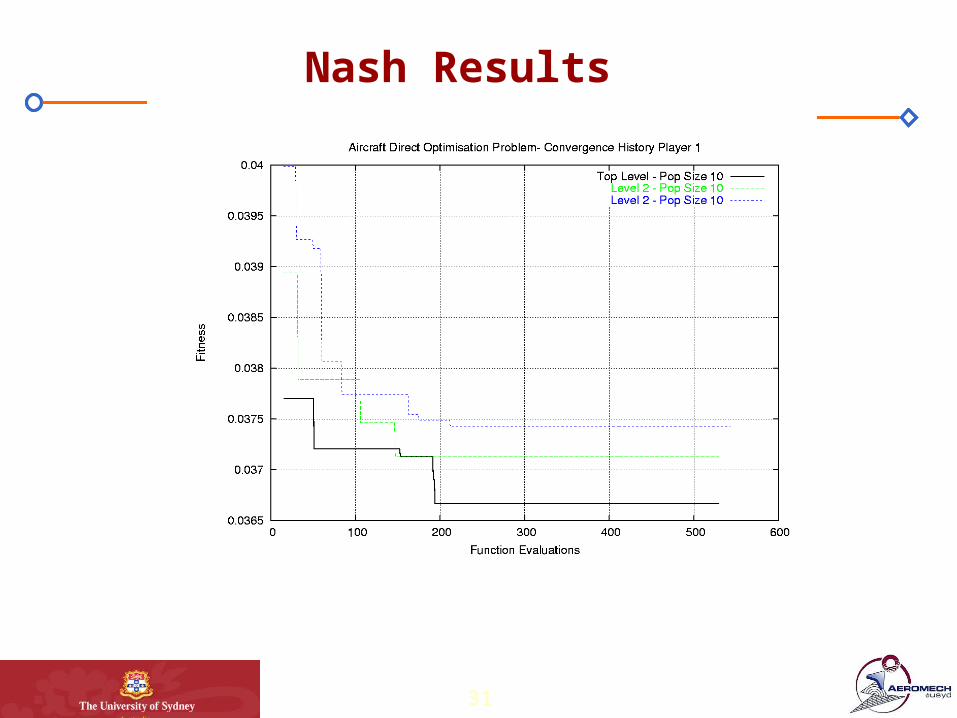
31
Nash Results
32
Nash Results (2)

33
Nash Results (3)
Variables Nash Equilibrium
Aspect Ratio 5.13
Wing Area (sq ft) 618
Wing Thickness 0.021
Wing Taper Ratio 0.17
Wing Sweep (deg) 28
Engine Thrust (lbf) 33356
Gross Weight (Lbs) 62463
Cruise Efficiency MCRUISE.L/DCRUISE
23.9

34
Implementation
Pareto Optimality Approach - Single Population.
- Population size of 40.
- Parallel computations, run asynchronously.
- Run for 600 function evaluations.
Asynchromous Evaluator
1 individual
1 individual
Single population
35
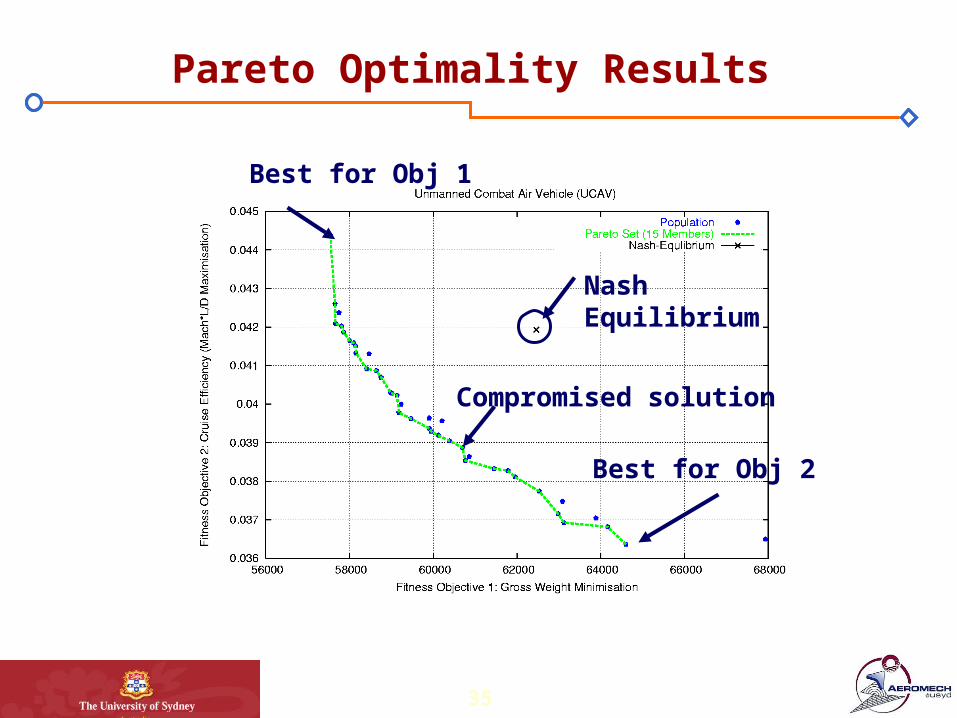
Pareto Optimality Results
Best for Obj 1
Best for Obj 2
Compromised solution
Nash Equilibrium

36
Comparison Results
Variables Pareto Member
0
Pareto Member 3
Pareto Member 7
Nash Equilibrium
Aspect Ratio 4.76 5.23 5.27 5.13
Wing Area (sq ft) 629.7 743.8 919 618
Wing Thickness (t/c)
0.046 0.050 0.041 0.021
Wing Taper Ratio 0.15 0.16 0.17 0.17
Wing Sweep (deg) 28 25 27 28
Engine Thrust (lbf) 32065 32219 32259 33356
Gross Weight (Lbs)
57540 59179 64606 62463
Increasing Cruise Efficiency
Decreasing Gross Weight
MCRUISE.L/DCRUISE22.5 25.1 27.5 23.9
Nash Point

37
Comparison Results (2)
Nash Equilibrium
Upper Bound
Lower Bound
Nash Design

38
Subsonic Transport Design and OptimisationProblem Definition: Find conceptual design parameters for a subsonic medium size
transport aircraft .
Gross weight min(WG)
The aircraft has two wing-mounted engines, and the number of passengers and crew is fixed to 200 and 8 respectively.
The aircraft is designed to cruise at 40000 ft and Mach 0.8.
We have six unknowns:Lower Bound Upper Bound
Aspect Ratio 7.0 13.1
Wing Area (sq ft) 1927 2872
Wing Thickness 0.091 0.235
Wing Taper Ratio 0.15 0.55
Wing Sweep (deg) 22.0 47.0
Engine Thrust (lbf)
32000 37000

39
Constraints and Implementation
Implementation The solution to this problem has been implemented
using a single population and parallel asynchronous evaluation, with the optimiser only considering a single objective.
After an empirical study, it was found that a small population size of 10 and buffer size of 30 produced acceptable results.
Constraints Constraints in this case are minimum takeoff
distance, moment coefficient for stability and control and range required. Violation of these constraints is treated with an rejection criteria.
40
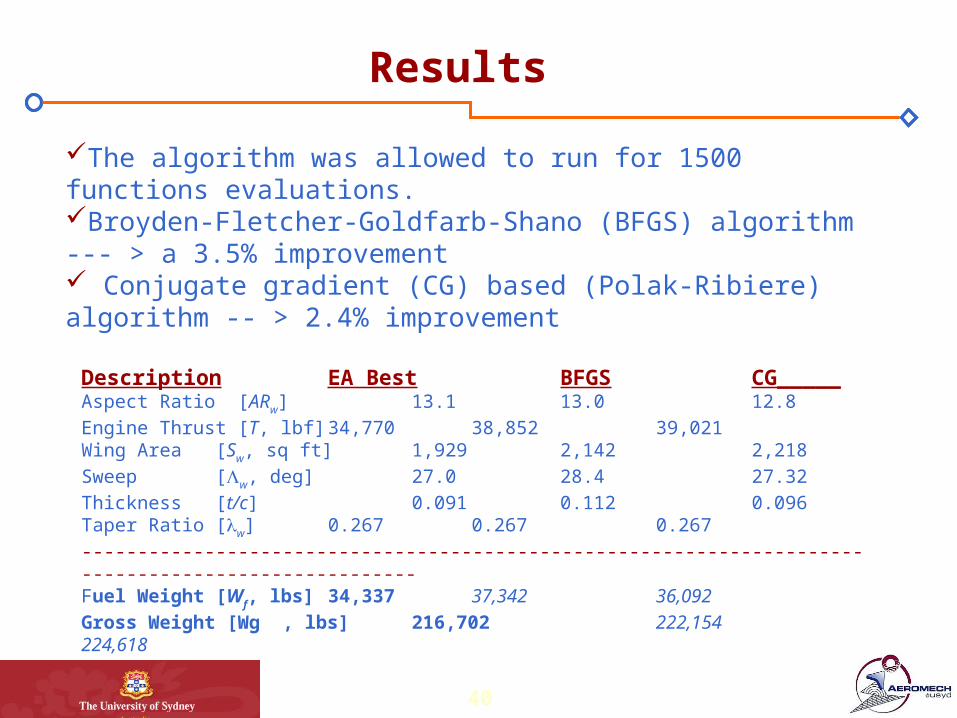
Results
The algorithm was allowed to run for 1500 functions evaluations. Broyden-Fletcher-Goldfarb-Shano (BFGS) algorithm --- > a 3.5% improvement Conjugate gradient (CG) based (Polak-Ribiere) algorithm -- > 2.4% improvement
Description EA Best BFGS CG_____Aspect Ratio [ARw] 13.1 13.0 12.8Engine Thrust [T, lbf] 34,770 38,852 39,021Wing Area [Sw, sq ft] 1,929 2,142 2,218Sweep [w, deg] 27.0 28.4 27.32Thickness [t/c] 0.091 0.112 0.096Taper Ratio [w] 0.267 0.267 0.267----------------------------------------------------------------------------------------------------Fuel Weight [Wf, lbs] 34,337 37,342 36,092Gross Weight [Wg , lbs] 216,702 222,154224,618
41
Conclusion
The new technique with multiple models: Lower the computational expense dilemma in an engineering environment (three times faster)
The multi-criteria HAPEA has shown itself to be promising for direct and inverse design optimisation problems.
No problem specific knowledge is required The method appears to be broadly applicable to black-box solvers.
As illustrated a variety of optimisation problems including Multi-disciplinary Design Optimisation (MDO) problems can be solved.
The process finds traditional classical aerodynamic results for standard problems, as well as interesting compromise solutions.
The algorithm may attempt to circumvent convergence difficulties with the solver.
In doing all this work, no special hardware has been required – Desktop PCs networked together have been up to the task.

42
What Are We Doing Now?
A Hybrid EA - Deterministic optimiser.
EA + MDO : Evolutionary Algorithms Architecture for Multidisciplinary Design Optimisation
We intend to couple the aerodynamic optimisation with:
o Aerodynamics – Whole wing design using Euler codes.
o Electromagnetics - Investigating the tradeoff between efficient aerodynamic design and RCS issues.
o Structures - Especially in three dimensions means we can investigate interesting tradeoffs that may provide weight improvements.
o And others…
Wing MDO using Potential flow and
structural FEA.

43
Questions???
44
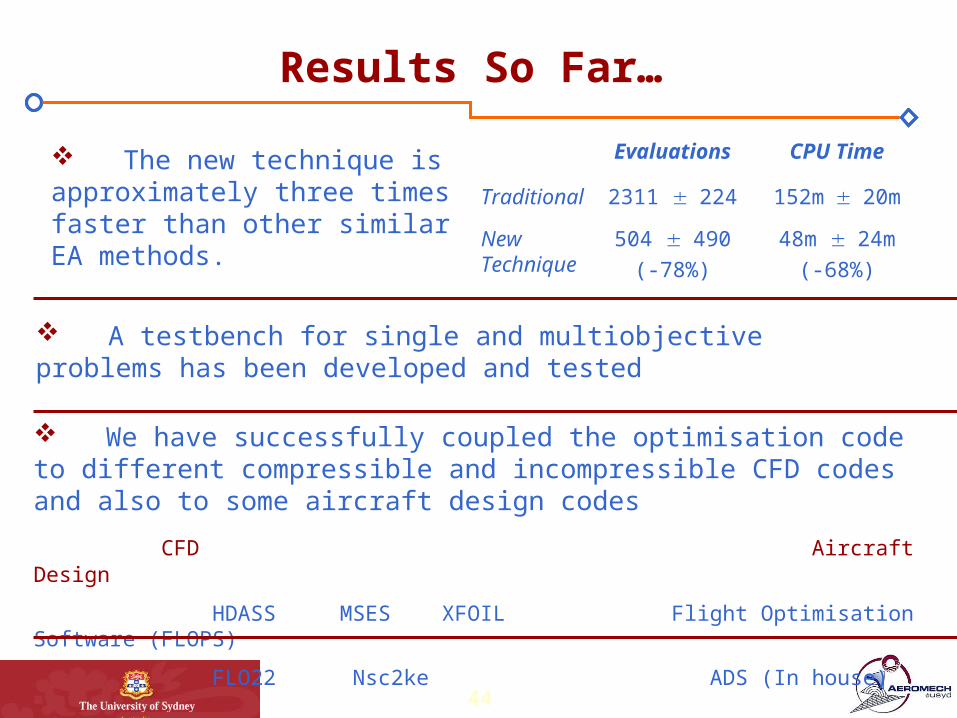
Results So Far…
Evaluations
CPU Time
Traditional
2311 224 152m20m
New Technique
504 490(-78%)
48m 24m(-68%)
The new technique is approximately three times faster than other similar EA methods.
We have successfully coupled the optimisation code to different compressible and incompressible CFD codes and also to some aircraft design codes
CFD Aircraft Design
HDASS MSES XFOIL Flight Optimisation Software (FLOPS)
FLO22 Nsc2ke ADS (In house)
A testbench for single and multiobjective problems has been developed and tested
45
Appendix-Applications
46
Publications
ADVanced EvolutioN Team (ADVENT ) Selected Publications and Conference Papers2003 E. Whitney, L. Gonzalez, K. Srinivas, J. Périaux: “Adaptive Evolution Design Without Problem Specific
Knowledge ”, Proceedings (to appear) of EUROGEN 2003, Barcelona, Spain.2003 E. Whitney, “A Modern Evolutionary Technique for Design and Optimisation in Aeronautics ”, PhD
Thesis, School of Aerospace, Mechanical and Mechatronic Engineering, J07 University of Sydney, NSW, 2006 Australia
2003 E. Whitney, L. Gonzalez, J. Périaux:, and K. Srinivas, “Playing Games with Evolution: Theory and Aeronautical Optimisation Applications”, ICIAM 2003 -- 5th International Congress on Industrial and Applied Mathematics, Sydney, Australia, July 2003. To appear.
2002 E. Whitney, L. Gonzalez, K. Srinivas, J. Périaux: “Multi-Criteria Aerodynamic Shape Design Problems in CFD using a Modern Evolutionary Algorithm on Distributed Computers”, Proceedings of the Second International Conference on Computational Fluid Dynamics, Sydney, Australia.
2002 J. Périaux:, M. Sefrioui, E. Whitney, L. Gonzalez, K. Srinivas, and J. Wang “Evolutionary Algorithms, Game Theory and Hierarchical Models in CFD”, Proceedings of the Second International Conference on Computational Fluid Dynamics, Sydney, Australia.
2002 E. Whitney, M. Sefrioui, K. Srinivas, J. Périaux: “Advances in Hierarchical, Parallel Evolutionary Algorithms for Aerodynamic Shape Optimisation”, JSME (Japan Society of Mechanical Engineers) International Journal, Vol. 45, No. 1.
2001 J. Périaux, M. Sefrioui, K. Srinivas, E. Whitney, J. Wang: “Recent Advances in Evolutionary Algorithms for Multicriteria Design Optimisation in Aeronautics”, Kickoff Meeting, MACSI Working Group on Multidisciplinary Optimisation and Inverse Problems, Vienna, Austria.
2001 M. Sefrioui, E. Whitney, J. Périaux, K. Srinivas: “Evolutionary Algorithms for Multi-Objective Design Optimisation”, Proceedings of Coupling of Fluids, Structures and Waves in Aeronautics (CFSWA), A French / Australian workshop, Melbourne, Australia.
2001 J. Périaux, M. Sefrioui, K. Srinivas, E. Whitney, J. Wang: “Advances in Hierarchical Parallel Genetic Algorithms and Game Decision Strategies for Design Optimisation in Aeronautics”, Proceedings of the First French / Finnish Seminar on Innovative Methods for Advanced Technologies, Espoo, Finland.
2000 E. Whitney, K. Srinivas: “Non-Generational Multiobjective Evolution Strategy for Aerofoil Design and Optimisation Problems in CFD”: Proceedings of the First International Conference on Computational Fluid Dynamics, Kyoto, Japan:
47
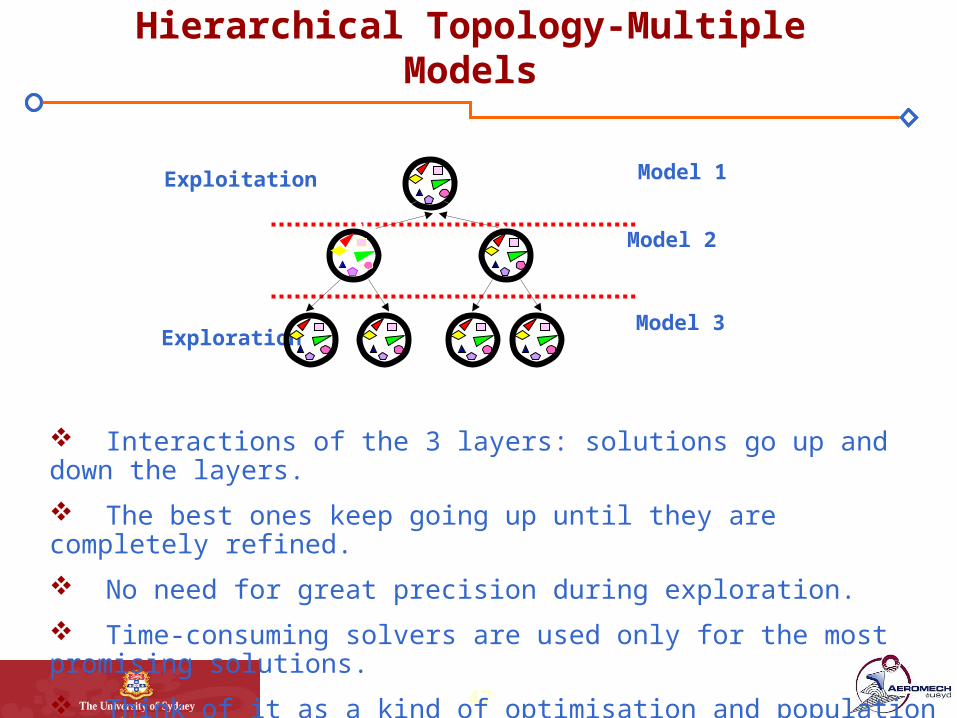
Hierarchical Topology-Multiple Models
Model 1precise model
Model 2intermediate
model
Model 3approximate
model
Exploration
Exploitation
Interactions of the 3 layers: solutions go up and down the layers.
The best ones keep going up until they are completely refined.
No need for great precision during exploration.
Time-consuming solvers are used only for the most promising solutions.
Think of it as a kind of optimisation and population based multigrid.

48
An Example: Aerofoil Optimisation
Property Flt. Cond. 1
Flt Cond.2
Mach 0.75 0.75
Reynolds 9 x 106 9 x 106
Lift 0.65 0.715
Constraints:• Thickness > 12.1% x/c (RAE 2822)• Max thickness position = 20% ® 55%
To solve this and other problems standard industrial flow solvers are being used.
Aerofoil cd
[cl = 0.65 ]
cd
[cl = 0.715 ]
Traditional Aerofoil RAE2822
0.0147 0.0185
Conventional Optimiser [Nadarajah [1]]
0.0098 (-33.3%)
0.0130 (-29.7%)
New Technique 0.0094 (-36.1%)
0.0108 (-41.6%)
For a typical 400,000 lb airliner, flying 1,400 hrs/year:
3% drag reduction corresponds to 580,000 lbs (330,000 L) less fuel burned.
[1] Nadarajah, S.; Jameson, A, " Studies of the Continuous and Discrete Adjoint Approaches to Viscous Automatic Aerodynamic Shape Optimisation," AIAA 15th Computational Fluid Dynamics Conference, AIAA-2001-2530, Anaheim, CA, June 2001.
49
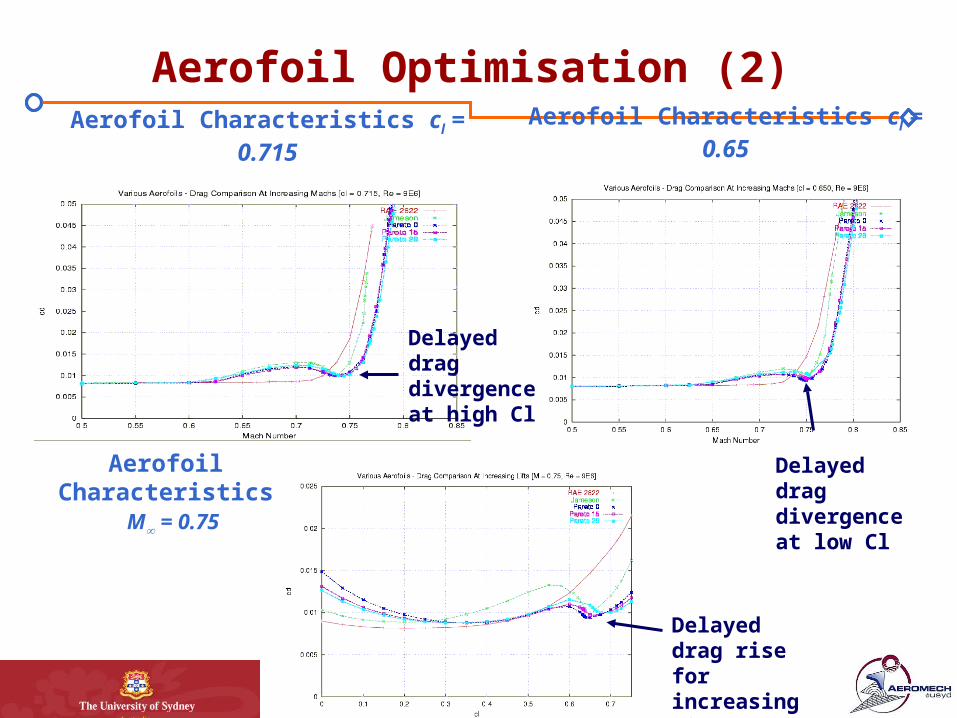
Aerofoil Characteristics cl = 0.715 Aerofoil Characteristics cl = 0.65
Delayed drag divergence at high Cl
Aerofoil Characteristics
M = 0.75
Aerofoil Optimisation (2)
Delayed drag divergence at low Cl
Delayed drag rise for increasing lift.
50
ZDT Test Cases

51
ZDT1
1 1
91: 1 +
n-1
, 1
2
1 1/
iZDT g x x
h f g f
f x x
n
i
g

52
ZDT2
1 1
92 : 1 +
n-1
, 1
22
1 1/
iZDT g x x
h f g f
f x x
n
i
g
53
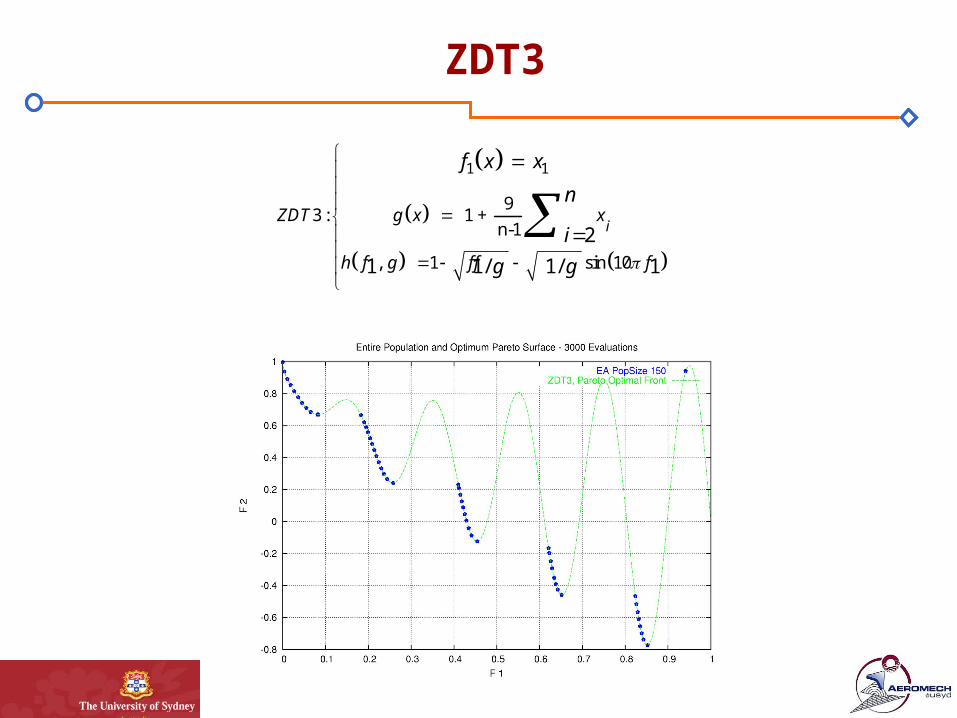
ZDT3
1 1
93 : 1 +
n-1
, 1 sin 10
2
1 1/ 1/ 1
iZDT g x x
h f g f f f
f x x
n
i
g g

54
ZDT4
1 1
4 : 1 + 10 n-1 10cos 4
, 1
2
2
1 1/
i iZDT g x x x
h f g f
f x x
n
i
g
55
Constrained Test Cases

56
BNH
4 4
5 5
5 5 25: :
8 3 7.7
0 5
0 3
2 21 1 2
2 22 1 2
2 21 1 2
2 22 1 2
12
f x x xMinimise
f x x x
C x x xBNHsubject to
C x x x
x
x

57
SRN
2+ 2 1
9 1
: 225 :
3 10 0
20 20,
20 20
2 21 1 2
22 1 2
2 21 1 2
2 1 2
12
f x x xMinimise
f x x x
SRN C x x xsubject to
C x x x
x
x

58
, 16 1 max( )
: : max 1(10
1 3,
0
2 21 1 2
2 AC, BC5)
AC, BC
f x y x y x yMinimisef x
TwoBarTrusssubject to
y
x
Two Bar Truss Design
A B
1x 2x

59
Goal Programming- Test Problem P1
, 2
, 2
: 0.1 1,0 101:
10
10 5
10
1 1 2
2 1 2
1 2
1 12
22
1
f x xMinimise
f x x
subject to S x xP
f x
xf
x
60
Results. Candidate and Target Geometries

61
Results: Example of Convergence.
Mesh Adaptation : Mesh 15