1 lecture 9: ai, magic and deception adaptive robotics 2008
TRANSCRIPT

1
Lecture 9: AI, magic and deception
Adaptive Robotics 2008
2
Assignment feedback
Read the question!
Try and answer the question – be explicit about the link between what you cover and how it relates to the question
Structure your argument – e.g. with introduction and conclusion
Start by saying what you are going to say
Finish by reflecting back on what you have said.

3
Research – Wikipedia versus published sources
Include material from the course – show that you know and have understood it.
4
Mark range 45-78%
Abstract – summarises whole essay, or journal paper.

5
Abstracte.g.“There have been many different approaches
to robotics, two of which include the more recent behaviour-based robotics and good old fashioned AI. The characteristics of each approach vary and they both have advantages and disadvantages depending on the overall purpose of the robot. These characteristics of these two approaches will be explored and contrasted”
6
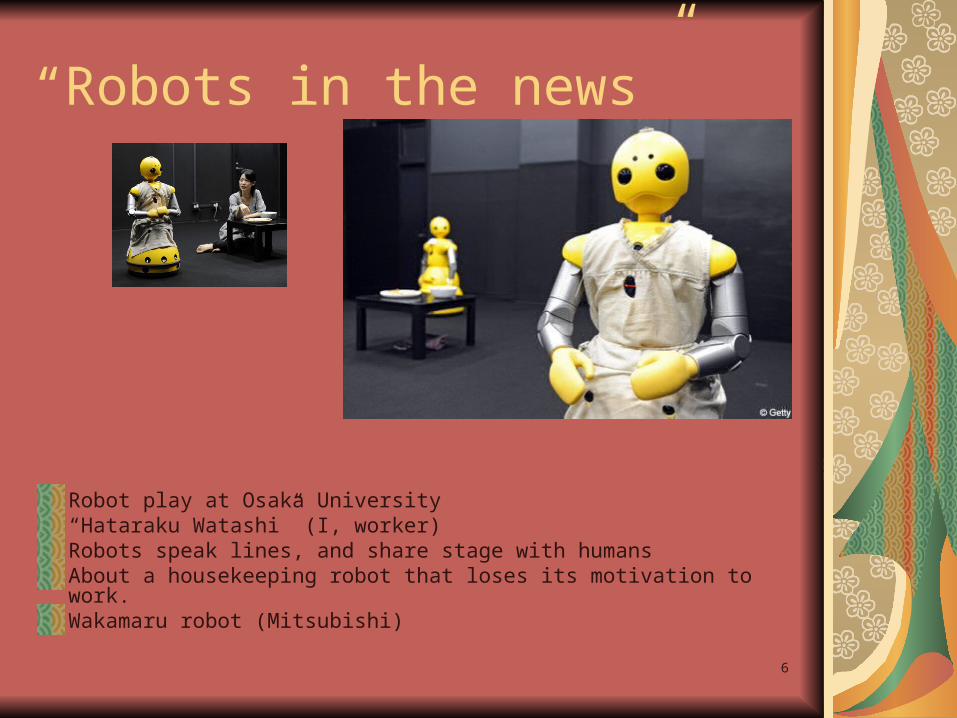
“Robots in the news”
Robot play at Osaka University“Hataraku Watashi” (I, worker)Robots speak lines, and share stage with humansAbout a housekeeping robot that loses its motivation to work.Wakamaru robot (Mitsubishi)

7
Lecture 9: AI, magic and deception
Human-Robot interactionAttempts to make humanoid robots, or convincing robot pets“Android science” (Karl MacDorman)Robots creating the illusion of life and animacy
Factors to exploit:Interest in technologyHuman tendency to anthropomorphismHuman tendency to zoomorphism“Darwinian buttons”See early examples … up to recent examples.See some experiments on HRI understanding what affects our interactions.
Should we do this? Class discussion …..
8
Deception and AIELIZA – creating the illusion of understanding
Automata – creating the illusion of life
“Android Science” – creating robots with human appearance.

9
Vaucanson’s duck
Created 1739 by Jacques Vaucanson
Appeared to eat kernels of grain, digest and defecate
(but pellets inserted into duck’s anus)

10
Chess playing automaton: The Turk
Constructed in 1769 by Baron von Kemplen for Austrian-Hungarian empress Maria Theresa
Played a strong game of chess against many human opponents – including Benjamin Franklin and Napoleon over 80 year period

11

12
Gakutensoku(learning from the laws of nature)
Built in 1929 by Makoto Nishimura for celebrations of ascension of Emperor Hirohito to his throne.
Could smile, move eyes, cheeks and chest, and move a pen.
Worked by forcing compressed air through hidden rubber tubes
Seated behind desk
People would remove their hats and pray to it.

13
Westinghouse robots
1927 Roy James Wensley and TelevoxNew mechanism for controlling electrical substationsPreviously – controller would phone worker in substation and tell them which switch to open. Worker would open switch and report back.New idea – replacing worker with bank of relay switches that could be operated by calling them on the phone3 tones from tuning forks directed to phoneAt receiving end, tones amplified to operate relay.

14
“Televox”
Wensley’s machine consisted of 2 boxes of electronicsWestinghouse publicity team – branded it a “mechanical man”Wensley added head, body and limbs made from prop boardStory spread rapidly“The club woman with Televox in her home may call up at five o’clock, inquire of Televox what the temperature in the living room is, have Televox turn up the furnace, light the oven in which she has left the roast, light the lamp in the living room, and do whatever else she may wish. Televox comes near to being a scientist’s realization of a dramatist’s fantasy.” (1928)

15

16

17
“American engineer H. J. Wensley of Westinghouse laboratories just created a robot which he named “Televox” because it follows directions remotely from voice commands or sounds of a musical instrument. The vibrations trigger an electric motor in the robot which makes it act according to the commands received.… This bewildering being is the most striking design of our mechanical time, whose creations, having neither sense nor brain, achieve a perfection that truly appears to approach the supernatural.”Vu magazine, 1928
18
Other Westinghouse robots
Katrina Televox
Willie Vocalite – smoked cigarettesControlled by instructions spoken into telephone – different responses triggered by number of syllables
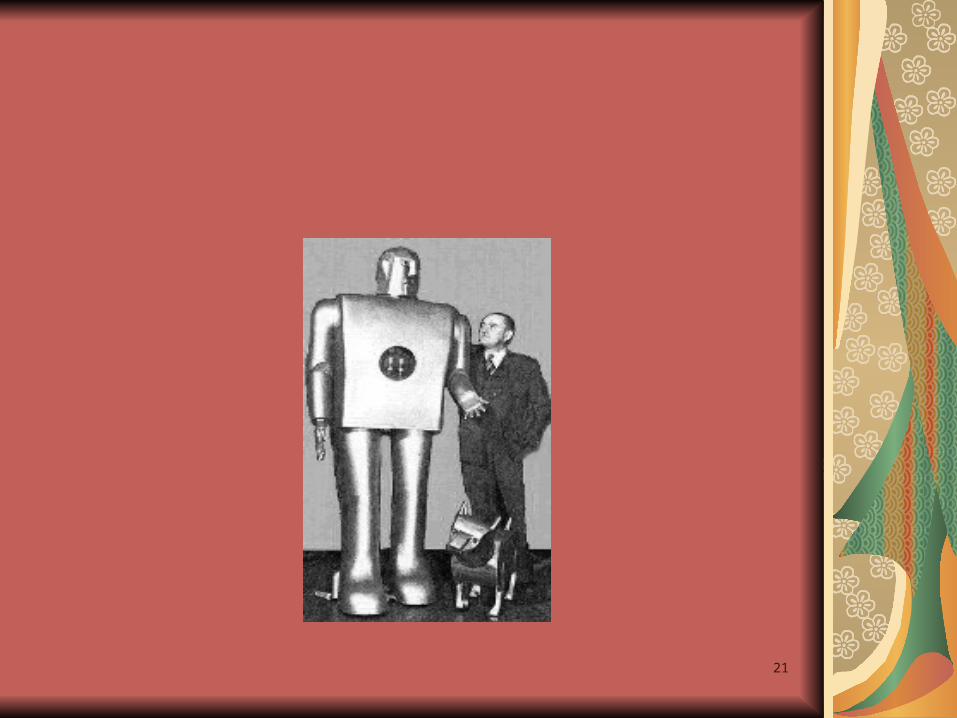
ElektroA 7 ft walking robot, remote controlled by voice
commands
Sparko A dog for Elektro

19
Willie Vocalite

20
Elektro
21

22

23
In these examples, no attempt to model humans, or animalsNo attempt to make the mechanisms underlying their behaviour the same as those of humans, or animalsAim instead is to create an illusion
Of lifeOf understandingAlso can serve to advertise a company
E.g. Westinghouse robotsE.g. Asimo and Honda

24
Factors making AI magic and deception easier
Humans have a natural tendency to anthropomorphise machines
E.g. talking to your car, or your computer as if it could understand you, and as if it could choose to behave well or not
E.g. seeing faces in inanimate objects

25
Anthropomorphism – attributing human characteristics to non-human creatures
Zoomorphism – attributing animal characteristics to non-animals

26
Factors making AI magic and deception easier
“willing suspension of disbelief”Exploited by puppeteers
(see Heart robot)
See children with their favourite teddy bear

27
Heart Robot
Developed at University of West of EnglandDesigned to encourage emotional responsesPart robot, part puppet – operated by expert puppeteerRobot appears to respond emotionally to human encounters- when hugged and treated gently its limbs become limp, eyelids lower, breathing relaxes and heart beat slows down.If shaken or shouted at, it flinches, clenches its hand, breathing and heart rate speed up and its eyes widen in dismay.

28
29
Factors making AI magic and deception easier
Sherry Turkle (2006) talks of how robots, or toys, that seem to need nurturing and care “push our Darwinian buttons”

30
Paro and My Real Baby
Therapeutic seal and Interactive doll
Turkle et al (2006) studied elderly care-home resident’s interactions
Method: observation and conversations with technology users
31
Turkle (1995) notes a tendency among both children and adults to treat computer artifacts that are minimally responsive as more intelligent than they really are:
“Very small amounts of interactivity cause us to project our own complexity onto the undeserving object”
e.g. Tamagotchi phenomena.

32

33
Kismet
Cynthia Breazeal, MITSherry Turkle (2006) looked at children interacting with Kismet and Cog – Found they preferred to see Kismet as something with which they could have a relationship.They would develop elaborate explanations for Kismet’s failures to understand, or to respond appropriately.E.g “Kismet is too shy” “Kismet is not feeling well”

34
Human-Robot interaction
What creates an illusion of intelligence?
What kind of robot do people prefer to interact with?
Humanoid? Furry? Friendly?
Eye contact, turn taking

35
Uncanny valley
36
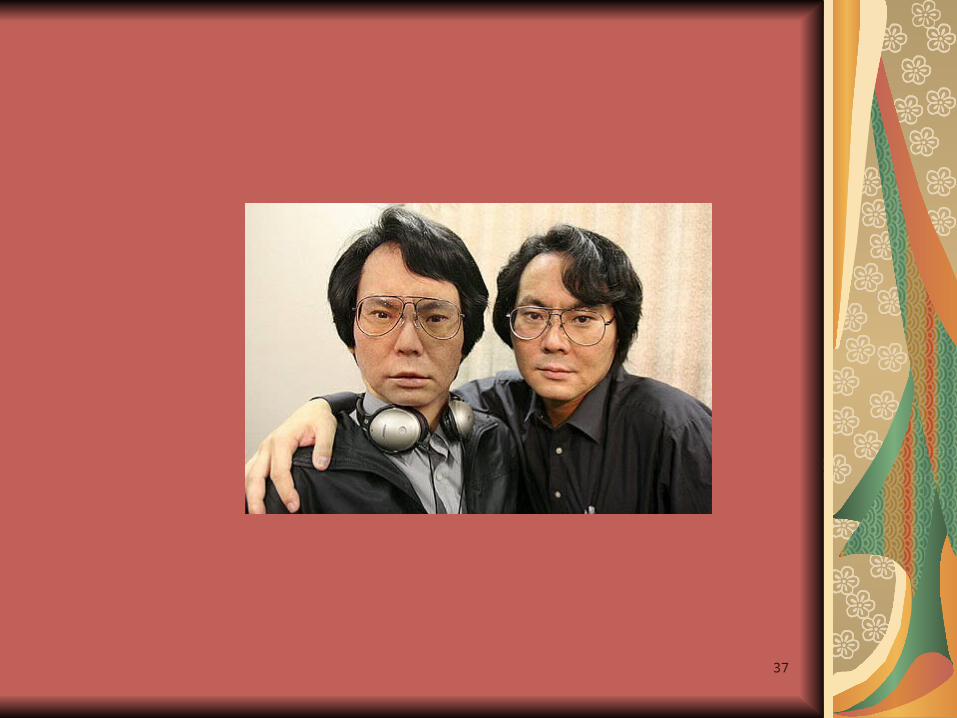
Uncanny valley
Japanese roboticist Masahiro Mori wrote about the uncanny valley in 1970.
Mori's hypothesis states that as a robot is made more humanlike in its appearance and motion, the emotional response from a human being to the robot will become increasingly positive and empathic, until a point is reached beyond which the response quickly becomes that of strong repulsion.
37

38
Total Turing Test?
Ishiguro, 2006Factors affecting our acceptance of robots as social partnersAndroid in booth viewed for 1 or 2 seconds
Static androidMoving android (micro movements)Real human
Task – check colour of cloth80% aware of android in static condition76.9% unaware of android in moving condition

39
Factors encouraging human-robot interaction
Appearance
Movement
Emotional expression

40
Factors encouraging human-robot interaction
Conversation – e.g. turn taking, nodding encouraginglyEye contactContingency – responding quickly enough
Sometimes Wizard of Oz approach used
Recognizing and responding to your emotion
Face? Voice? Body language?
41
Rubi/Qrio project
UCSD (University of California, San Diego)
Studied interactions between children and QRIO robot in day care centre over 5 months

42
43
Measured the interactions between toddlers and robots – they interacted with QRIO more than with toy robot, or teddy bear.
The robot responded contingently – e.g. giggling when patted on the head
Part Wizard of Oz (hidden operator)
Their interactions decreased in a middle period where the robot performed a preset, but elaborate dance.

44
“Results indicate that current robot technology is surprisingly close to achieving autonomous bonding and socialization with human toddlers for sustained periods of time. “ (Tanaka et al, 2007)
But the toddlers’ interactions were supervised and guided by other adults
Also interaction times limited (1 hour sessions)
And some remote control

45
Social implications?
- making robots appear intelligent?
- making them seem to care “I love you”
- using them as companions

46
Hello Kitty robot
Website claims: "This is a perfect robot for whoever does not have a lot time to stay with their child. Hello Kitty Robot can help you to stay with your child to keep them from being lonely."

47
PaPeRo robot

48
Robot companions and carers for the elderly, or the very young- are they a good thing?
Discussion in pairs, then 4s etc, then report back advantages and disadvantages.
49
The March of the Robot DogsSparrow (2002)
Robot “pets” suggested as companions for the elderly
There are some demonstrable benefits
But “For an individual to benefit significantly from ownership of a robot pet they must systematically delude themselves regarding the real nature of their relation with the animal.” (Sparrow, 2002)

50
Living animal pets can share experiences with us.Sparrow argues that it’s right to value our relationships with themBut a robot is not something we can have a relationship with.To think otherwise is to be deluded.Morally wrong to delude old people into thinking they can have a relationship with a robot petAlso old people need human contact – the more robots are used in their care, the less human contact they will receive.

51
Summary
Robots and illusion of animacyHuman tendencies to draw on
AnthropomophismCare taking
Tour of robots and automataEarly – Vaucanson’s duck, Televox and Westinghouse robotsMore recent – Asimo, Heart robot, Kismet
Factors affecting illusion – Human-Robot interactionEmotional expressionsPhysical appearance (uncanny valley)Contingency of response
Turn takingEye contact
Advantages and disadvantages of robot companions

52
Feedback
Content
Organisation/Argument
Writing