1 computer graphics visible-surface detection(identification) cs2401 & by n.sathish kumar ap...
TRANSCRIPT

1
Computer Graphics
Visible-Surface Detection(identification)
CS2401
www.nskinfo.com & www.nsksofttech.com
BY
N.SATHISH KUMAR
AP
CSE

2
UNIT-2 LAST TOPIC
Visible-Surface Detection(identification)
CS2401- Computer Graphics

3
Visible-Surface Detection
4
Visible-Surface Detection Methods
• Determine what is visible within a scene from a chosen viewing position
• Two approaches– Object-space methods: Decide which object, as a
whole, is visible – Image-space methods: The visibility is decided point-
by-point
• Most visible-surface algorithms use image-space methods
• Sometimes, these methods are referred to as hidden-surface elimination

5
Approaches
• Back-Face Removal• Depth Buffer• A-Buffer• Scanline• Depth Sorting• BSP Tree• Area Subdivision• Octree
6
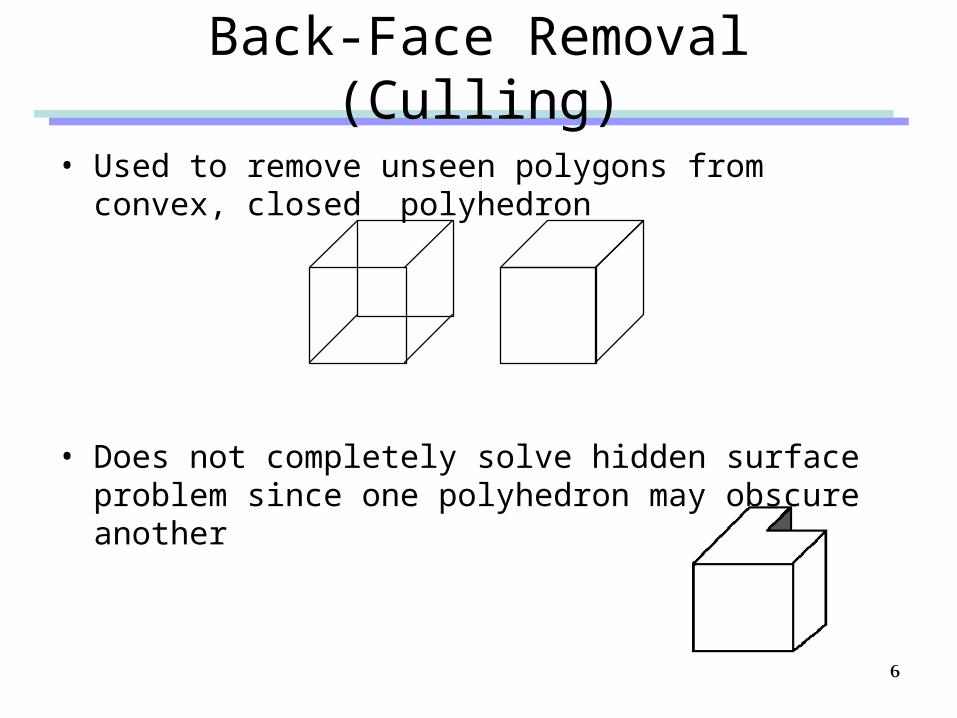
Back-Face Removal (Culling)
• Used to remove unseen polygons from convex, closed polyhedron
• Does not completely solve hidden surface problem since one polyhedron may obscure another

7
Back-Face Removal (Culling)
• Compute the equation of the plane for each polygon– A point (x,y,z) is behind a polygon surface if
• Determine back-face– In projection coordinates, we need to consider only the z
component of the normal vector N
0 DCzByAx
0NVview

8
Depth-Buffer (Z-Buffer)
• Z-Buffer has memory corresponding to each pixel location
– Usually, 16 to 20 bits/location.

9
Depth-Buffer (Z-Buffer)
• Initialize
– Each z-buffer location Max z value
– Each frame buffer location background color
• For each polygon:
– Compute z(x,y), polygon depth at the pixel (x,y)
– If z(x,y) < z-buffer value at pixel (x,y), then
• z buffer(x,y) z(x,y)
• pixel(x,y) color of polygon at (x,y)
10
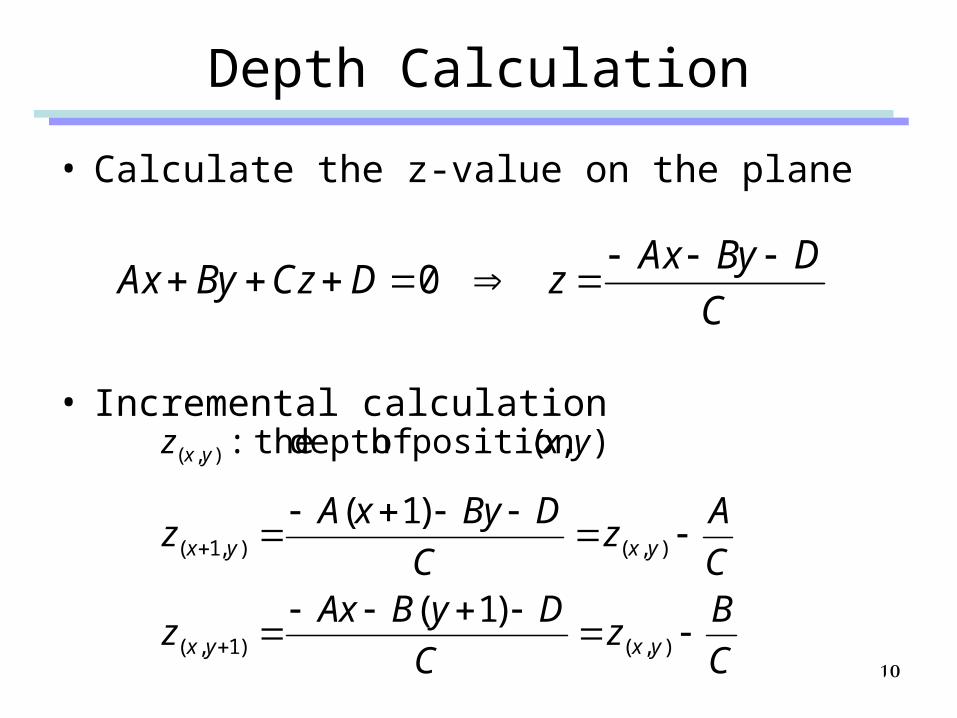
Depth Calculation
• Calculate the z-value on the plane
• Incremental calculation
C
DByAxzDCzByAx
0
C
Bz
C
DyBAxz
C
Az
C
DByxAz
yxyx
yxyx
),()1,(
),(),1(
)1(
)1(
),(position ofdepth the: ),( yxz yx
11
Depth-Buffer (Z-Buffer)
• Advantages/Disadvantages– Lots of memory– Linear performance– Polygons may be processed in any order
• Modifications needed to implement antialiasing, transparency, translucency effects
– Commonly implemented in hardware very fast
12
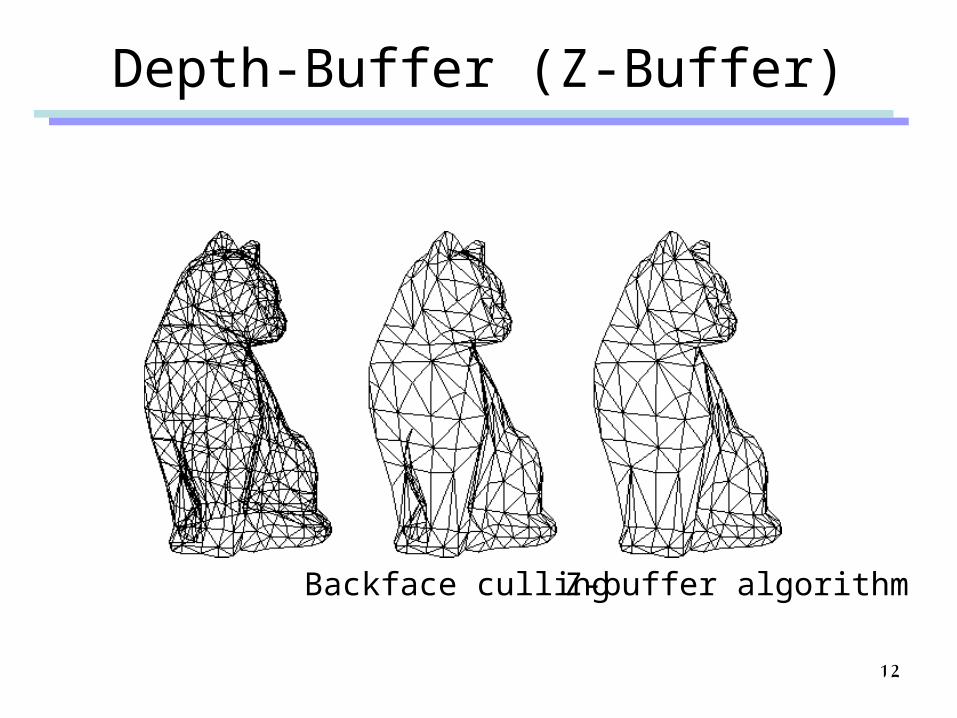
Depth-Buffer (Z-Buffer)
Backface cullingZ-buffer algorithm

13
Accumulation Buffer (A-Buffer)
• An extension of the depth-buffer for dealing with anti-aliasing, area-averaging, transparency, and translucency
• The depth-buffer method identifies only one visible surface at each pixel position– Cannot accumulate color values for more than one
transparent and translucent surfaces
• Even more memory intensive• Widely used for high quality rendering
14
Accumulation Buffer (A-Buffer)
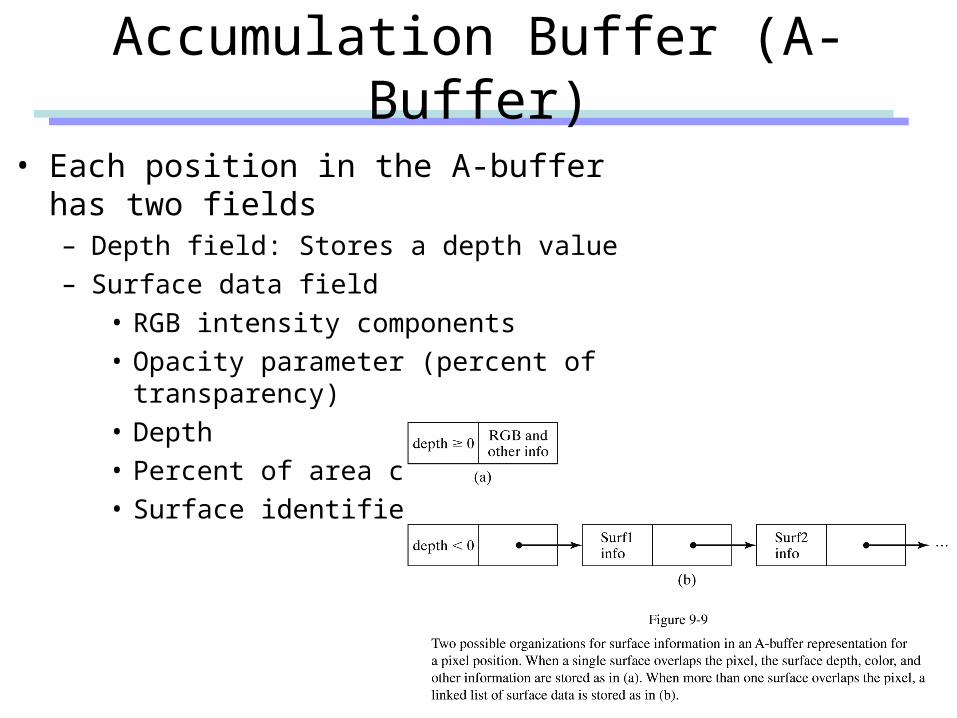
• Each position in the A-buffer has two fields– Depth field: Stores a depth value– Surface data field
• RGB intensity components• Opacity parameter (percent of transparency)• Depth• Percent of area coverage• Surface identifier

15
Scan Line Method
• Intersect each polygon with a particular scanline and solve hidden surface problem for just that scan line– Requires a depth buffer equal to only one scan line– Requires the entire scene data at the time of scan conversion
• Maintain an active polygon and active edge list• Can implement antialiasing as part of the algorithm
16
Depth Sorting
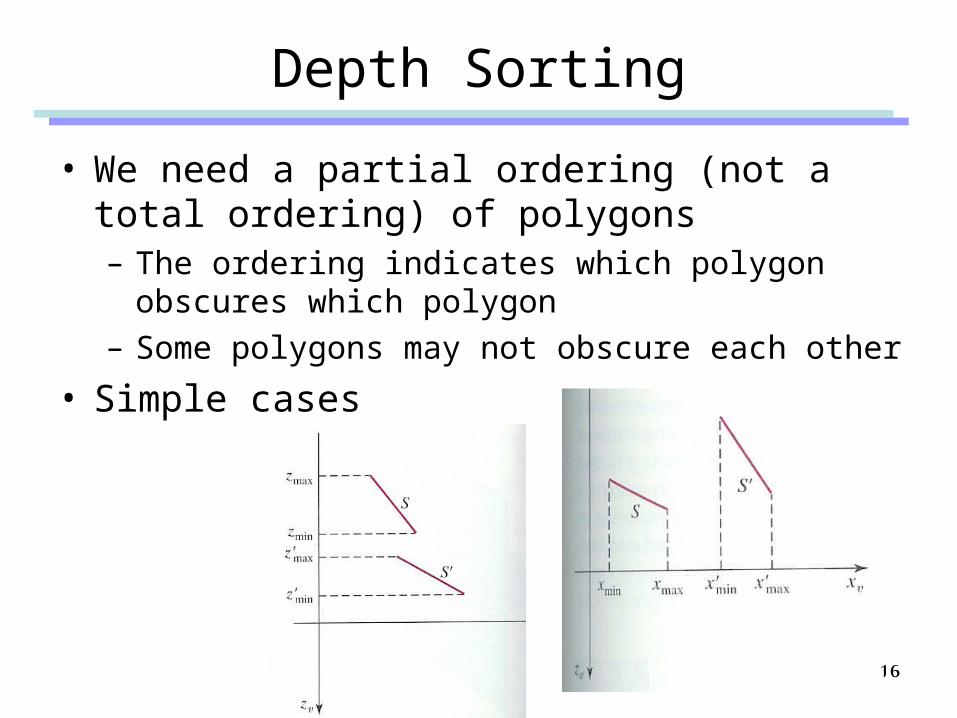
• We need a partial ordering (not a total ordering) of polygons– The ordering indicates which polygon obscures which
polygon– Some polygons may not obscure each other
• Simple cases
17
Depth Sorting
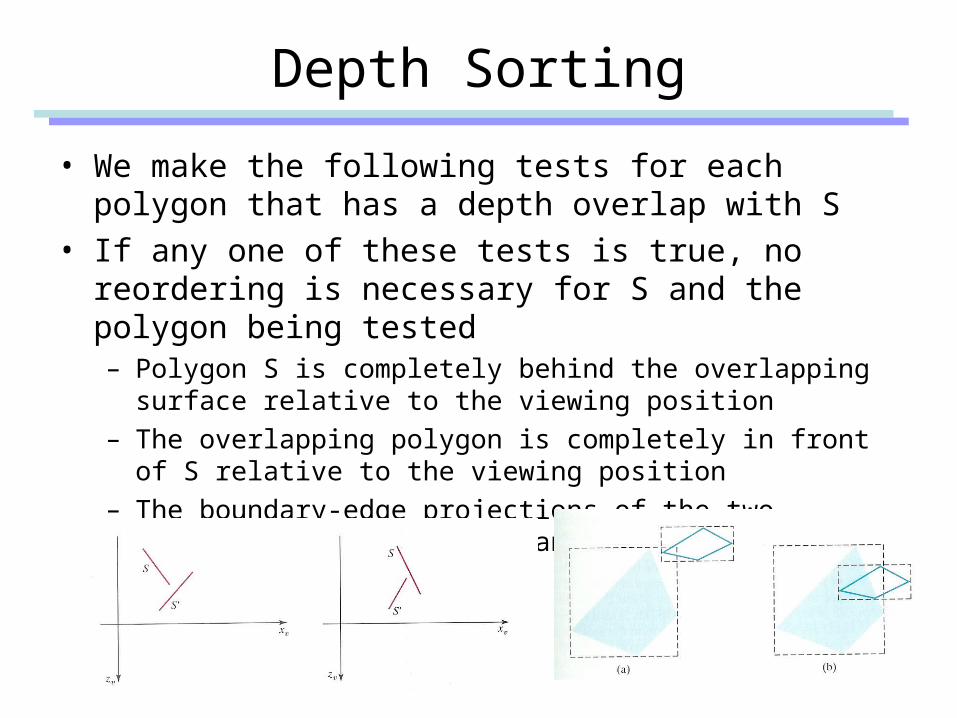
• We make the following tests for each polygon that has a depth overlap with S
• If any one of these tests is true, no reordering is necessary for S and the polygon being tested– Polygon S is completely behind the overlapping surface relative
to the viewing position– The overlapping polygon is completely in front of S relative to the
viewing position– The boundary-edge projections of the two polygons onto the
view plane do not overlap

18
Depth Sorting
• Example
19
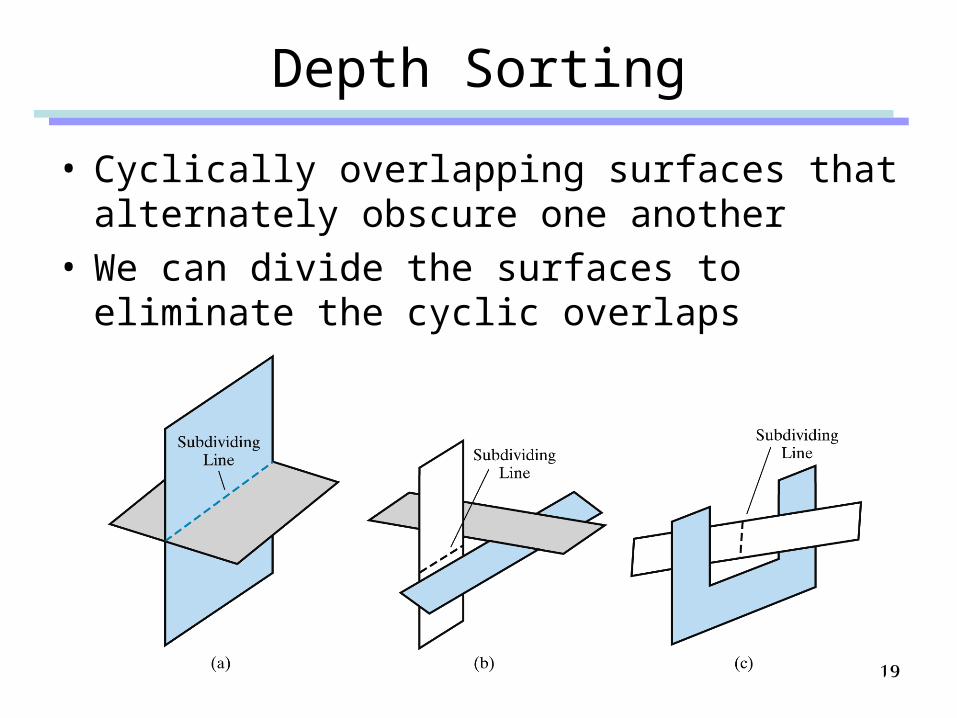
Depth Sorting
• Cyclically overlapping surfaces that alternately obscure one another
• We can divide the surfaces to eliminate the cyclic overlaps
20
BSP Trees
• Binary space partitioning is an efficient method for determining object visibility
• Paint surfaces into the frame buffer from back to front
• Particularly useful when the view reference point changes, but the objects are at fixed positions

21
BSP Tree Construction
1. Choose a polygon T and compute the equation of the plane it defines
2. Test all the vertices of all the other polygons to determine if they are in front of, behind, or in the same plane as T.
3. If the plane intersects a polygon, divide the polygon at the plane
4. Polygons are placed into a binary search three with T as the root
5. Call the procedure recursively on the left and right subtree
22
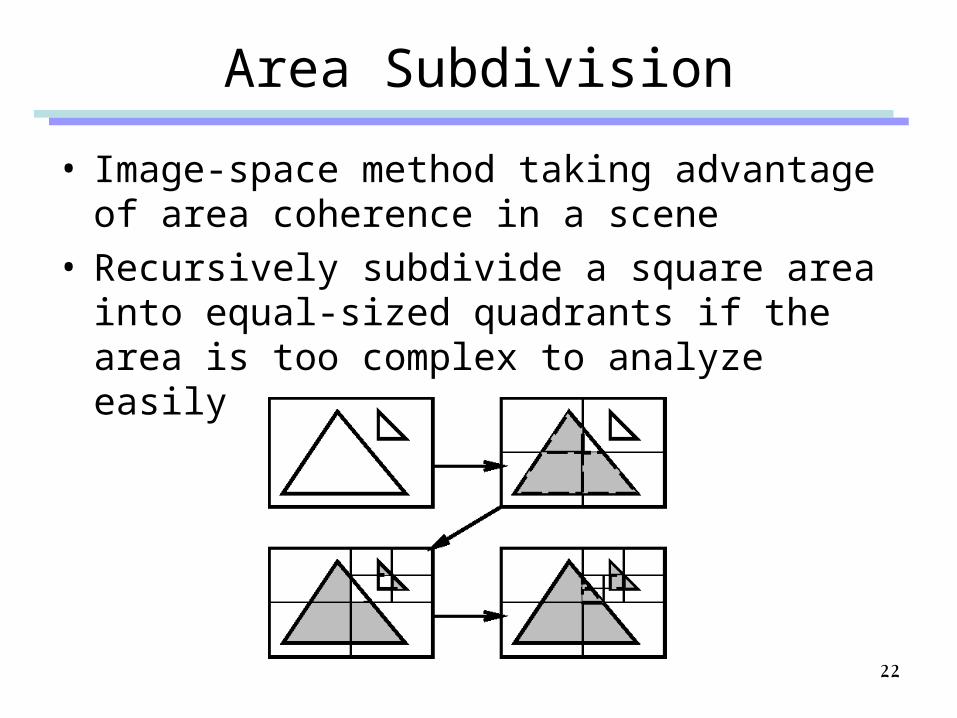
Area Subdivision
• Image-space method taking advantage of area coherence in a scene
• Recursively subdivide a square area into equal-sized quadrants if the area is too complex to analyze easily
23
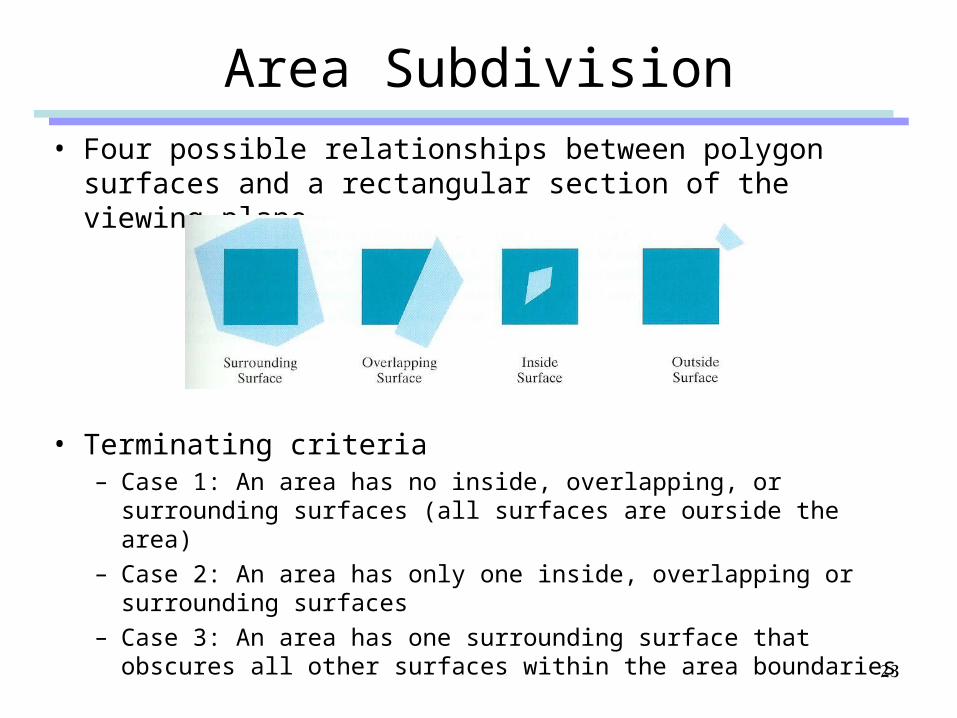
Area Subdivision• Four possible relationships between polygon surfaces and
a rectangular section of the viewing plane
• Terminating criteria– Case 1: An area has no inside, overlapping, or surrounding
surfaces (all surfaces are ourside the area) – Case 2: An area has only one inside, overlapping or surrounding
surfaces– Case 3: An area has one surrounding surface that obscures all
other surfaces within the area boundaries

24
Octrees
• Visible-surface identification is accomplished by searching octree nodes in a front-to-back order