groessel.weebly.com · web view∙ print out of program and sub-routines – a copy of the...
TRANSCRIPT

SquareBot(or BaseBot) Challenge #1
1. Build SquareBot from directions given.2. Program SquareBot from directions given.
Elements Weight 5 Points 4 Points 3 Points 2 Points 1 – 0 Points Total
Built Squarebot Built correctly w/o flaws
Built correctly with a few flaws
Built incorrectly, but still operated with fixes
Poorly Built Didn’t work at all
Programmed Squarebot
Programmed flawlessly, was able to troubleshoot
Programmed correctly, but couldn’t troubleshoot downloading issues
Another student programmed for you.
Could demonstrate how to download any programs
No program, didn’t function
Teamwork
& improvements
Creative changes that worked
Creative changes that didn’t work
Improvements were only ornamental, not functional
None None
Robotics Challenge #2-- Off road autonomous and controlled.
Constraints: 1. The vehicle will have the ability to maneuver through/over obstacles on a given track autonomously.2. Uses sensors and switches keep on track3. Can travel up and down inclines, go over an obstacle 3’ or less in height. 4. 1 cortex, 1 battery, VEX only parts (unless approved)
Partners:
Elements Weight 5 Points 4 Points 3 Points 2 Points 1 – 0 Points Total
Concept Sketches Concept sketches are included from all team members. Design development and subsequent modifications are shown.
Concept sketches are included from both team members. Design development shown. Some subsequent modifications shown.
Concept sketches are included from both team members. Design development shown. No subsequent modifications shown.
Concept sketches are included from one team member. Design development vaguely shown. No subsequent modifications shown.
Concept sketches are incomplete or missing.
Evidence of Concept
Can show multiple forms
Can show singular
No evidence, but 1st hand
No evidence No Evidence

of evidence of a similar machine that works.
evidence of a similar machine that works.
knowledge of workability.
Teamwork
(decided by Mr. Groessel and
Leider)
Both contributed to design, building and programming.
Both contribute to design and building, but only one programmed
Both designed, but only one contributed building and programming
Didn’t work well together.
Did little or nothing.
Materials List
100% of the appropriate materials have been selected and listed.
80% of the appropriate materials have been selected and listed.
70% of the appropriate materials have been selected and listed.
50% of the appropriate materials have been selected and listed.
Little to no evidence of a materials list is included.
Programming
Finalized Easy C program emailed or printed
Shown to us, but never finalized.
Inadequate programming functions
Only remote programming.
Never programmed
Autonomous Function
Completed course on its own.
Completed, but helped once.
Completed but helped 2-3 times.
Made one obstacle.
Never completed
Driven functionCompleted remotely
Completed, but helped once.
Completed but helped 2-3 times.
Made one obstacle.
Never completed
Robotic Artwork Name____________________________
The goal of this robotics engineering project is to build a human-guided or machine-controlled robot that can create drawings/paintings.
Keeping the goal in mind, start by writing down the requirements that the robot must have in order to accomplish the goal. These are called the design constraints.
1. Record your design requirements on the prepared sheet.a. The robot's structure must be stable and sturdy enough to hold the other components,
like the microcontroller and its battery pack.b. The robot will draw on a “canvas” on the ground or tabletop.c. The robot must be placed over the “canvas”.d. The artwork must have at least 3 colors.e. The robot must have a markers or brushes attached. Choose whether you want the robot
to draw with one marker at a time or more. f. If done remotely, the remote must be built. No VEX controllers allowed.g. It may be programmed to create an “original” artwork.h. It may be designed to copy what you are drawing.
2. Now use your design requirements to guide the design of the robot. Gather your thoughts and draw out your ideas in this lab packet.
You should include the following items in your presentation:

a. A list of the project constraints that guided your building of the robot.b. The rough preliminary sketches of your design possibilities.
Design constraints in your own words:
A.
B.
C.
D.
E.
F.
G.
H.

Preliminary Sketches: (3 minimum)


Final Sketch:
Elements Weight 5 Points 4 Points 3 Points 2 Points 1 – 0 Points Total
Concept Sketches Concept sketches are included from all team members. Design development and subsequent modifications are shown.
Concept sketches are included from both team members. Design development shown. Some subsequent modifications shown.
Concept sketches are included from both team members. Design development shown. No subsequent modifications shown.
Concept sketches are included from one team member. Design development vaguely shown. No subsequent modifications shown.
Concept sketches are incomplete or missing.
Final sketch
Can recognize robot from final sketch, everything properly labeled.
Can recognize robot from final sketch, everything not properly labeled.
Doesn’t look like robot, not labeled.
poorly done, incomplete
Non-existent
ConstraintsAll constraints followed
Short on one constraint; ie. Only 2 colors
More than one requirement missing
Didn’t write or follow constraints.
Missing, or incomplete
Teamwork
(decided by Mr. Groessel and
Leider)
Both contributed to design, building and programming.
Both contribute to design and building, but only one programmed
Both designed, but only one contributed building and programming
Didn’t work well together.
Did little or nothing.
Cortex mapComplete updated cortex map
Incorrect parts of map
Started, but incomplete
Incomplete missing
Programming
Finalized Easy C program emailed or printed
Shown to us, but never finalized.
Inadequate programming functions
Only remote programming.
Never programmed
Function Created “art” Created “art” Can draw a line Poor design, Not working

multi-colored or two but built
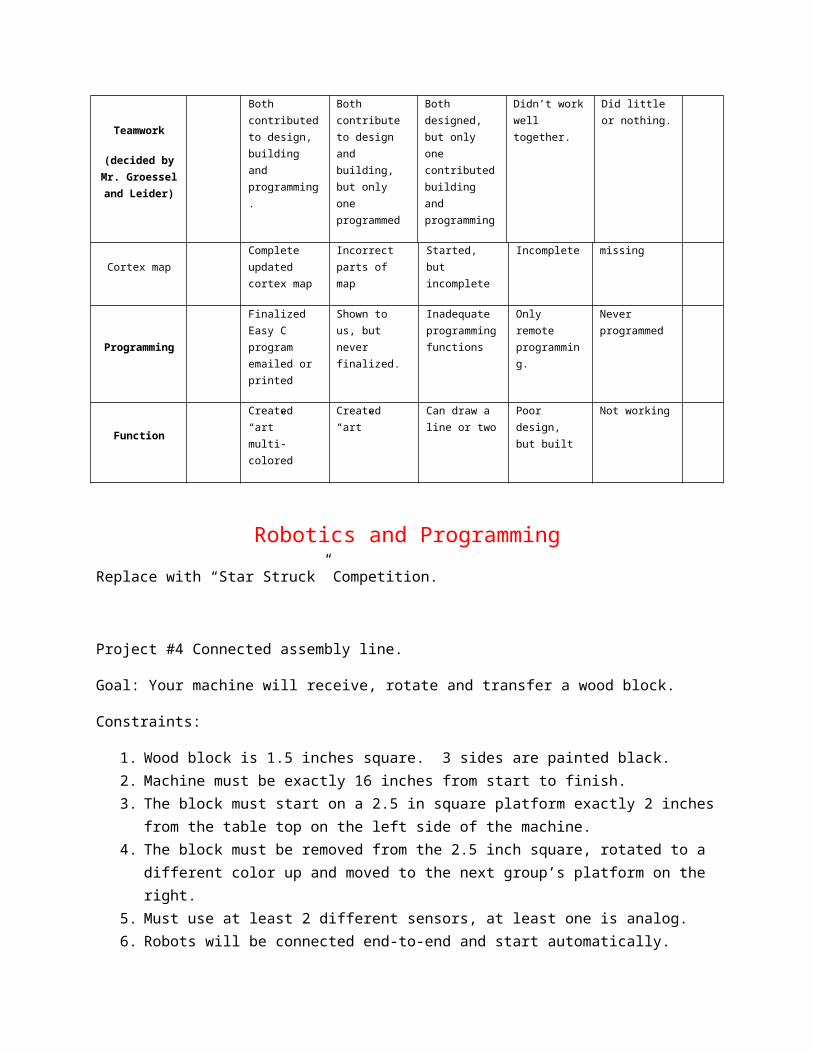
Robotics and Programming
Replace with “Star Struck” Competition.
Project #4 Connected assembly line.
Goal: Your machine will receive, rotate and transfer a wood block.
Constraints:
1. Wood block is 1.5 inches square. 3 sides are painted black.2. Machine must be exactly 16 inches from start to finish.3. The block must start on a 2.5 in square platform exactly 2 inches from the table top on the left
side of the machine.4. The block must be removed from the 2.5 inch square, rotated to a different color up and moved
to the next group’s platform on the right.5. Must use at least 2 different sensors, at least one is analog.6. Robots will be connected end-to-end and start automatically.
Elements Weight 5 Points 4 Points 3 Points 2 Points 1 – 0 Points Total
Concept Sketches Concept sketches are included from all team members. Design development and subsequent modifications are shown.
Concept sketches are included from both team members. Design development shown. Some subsequent modifications shown.
Concept sketches are included from both team members. Design development shown. No subsequent modifications shown.
Concept sketches are included from one team member. Design development vaguely shown. No subsequent modifications shown.
Concept sketches are incomplete or missing.
Final sketch
Can recognize robot from final sketch, everything properly labeled.
Can recognize robot from final sketch, everything not properly labeled.
Doesn’t look like robot, not labeled.
poorly done, incomplete
Non-existent
ConstraintsAll constraints followed
Short on one constraint; ie.
More than one requirement missing
Didn’t write or follow constraints.
Missing, or incomplete
Teamwork Both contributed to design,
Both contribute to design and building, but
Both designed, but only one contributed
Didn’t work well together.
Did little or nothing.
(decided by Mr. Groessel and
Leider)
building and programming.
only one programmed
building and programming
Cortex mapComplete updated cortex map
Incorrect parts of map
Started, but incomplete
Incomplete missing
Programming
Finalized Easy C program emailed or printed
Shown to us, but never finalized.
Inadequate programming functions
Only remote programming.
Never programmed
Function
Moved and rotated the block. Starts automatically
Moved but didn’t rotate
Doesn’t start automatically
Poor design, but built
Not working
Have You Lost Your Marbles?
PurposeTeams of students will simulate an industrial sorting process using Fischertechnik-building components.

Problem StatementToday’s consumer pays a steep price (both long and short term) for products made from virgin materials. Most often, these products find their final resting-place in the local landfill. As a post-industrial society, we have a need, as well as a responsibility to view our used products as a resource, to reuse, remanufacture, or recycle these products back into the manufacturing cycle. As recycling centers become a more common sight in our community, we must try to make them as efficient and cost effective as possible. Sorting the various components of trash is a time consuming process. Any effort made at trying to automate this task would increase the cost effectiveness of this operation.
Design StatementYou and your partner(s) are to design an automated separation system that simulates the separation process that is used in an industrial recycling plant. You are required to separate three different colored marbles, clear and opaque, into separate collection bins.
The system your team designs must include the following sub-systems:
∙ Hopper System: A place to dump, not place, the raw material (trash), to begin the process. You can use non-Fischertechnik parts for the hopper.
∙ Transport System: A system to move the marbles from point to point: from the
inspection station to the proper bin for those color marbles.
∙ Sensing System: A system for recognition of part or position of the bin
∙ Bin System: A system to collect and hold the marbles after the system has
determined its classification.
∙ Program: A computer program used to automate the sorting system. You must use subroutines in your program.

DocumentationProject Journal
Your team will be required to maintain a daily journal of the marble sorter design and construction. At the end of the project this will be submitted as part of the project grade. The journal will be made up of the following sections:
∙ Title on every page.
∙ Initial sketches – You will conceptualize your design and prepare a quality sketch of
your system. This will be the concept you develop to completion. Any changes to your sorter will have to be sketched and documented.
∙ Program Narrative – A written step-by-step description of how you want your team’s
marble sorter to operate.
∙ Daily Entries – Every day keep track of your progress. Your entries must be made in the following form.
o Date:
o Tasks Accomplished
o Tasks yet to be addressed
∙ Print out of Program and Sub-routines – A copy of the program, and each subroutine in that program, will be copied to Word. A written description of each part of the program will need to be included.
∙ Application paper – A 1 – 2 page paper explaining how the major concepts studied
through the Fischertechnik activities relate to the theory of operation and construction of your marble sorter.
∙ Additional Comments
Project Constraints:
∙ The raw material (trash) will consist of clear (transparent) and black (opaque) marbles.
∙ Only Fischertechnik components may be used in the construction of your sorter,
except for the hopper, which will be constructed from cardboard. (Type and amount of material per team will be announced.)

∙ Each team will consist of two people one only by permission of instructor.
∙ Periodically throughout the life of the project you will receive progress reports. These are designed to make sure you are addressing all aspects of the problem in a timely manner.
Timeline:
∙ There will be a final due date. But plan on building/improving for extra credit. If you have the time build a continuously running marble sorter I will put it the 500 hall corner display box.
Build a music playing robot
Constraints:
1. Must play the given instrument with some kind of rhythm or tune.
Elements Weight 5 Points 4 Points 3 Points 2 Points 1 – 0 Points Total
Concept Sketches Concept sketches are included from all team members. Design development and subsequent modifications are shown.
Concept sketches are included from both team members. Design development shown. Some subsequent modifications shown.
Concept sketches are included from both team members. Design development shown. No subsequent modifications shown.
Concept sketches are included from one team member. Design development vaguely shown. No subsequent modifications shown.
Concept sketches are incomplete or missing.
Evidence of Concept
Can show multiple forms of evidence of a similar machine that works.
Can show singular evidence of a similar machine that works.
No evidence, but 1st hand knowledge of workability.
No evidence No Evidence
Teamwork
(decided by Mr. Groessel and
Leider)
Both contributed to design, building and programming.
Both contribute to design and building, but only one programmed
Both designed, but only one contributed building and programming
Didn’t work well together.
Did little or nothing.
Materials List 100% of the appropriate
80% of the appropriate
70% of the appropriate
50% of the appropriate
Little to no evidence of a

materials have been selected and listed.
materials have been selected and listed.
materials have been selected and listed.
materials have been selected and listed.
materials list is included.
Programming
Finalized Easy C program emailed or printed
Shown to us, but never finalized.
Inadequate programming functions
Only remote programming.
Never programmed
Autonomous Function
Completed course on its own.
Completed, but helped once.
Completed but helped 2-3 times.
Made one obstacle.
Never completed
Driven functionCompleted remotely
Completed, but helped once.
Completed but helped 2-3 times.
Made one obstacle.
Never completed
Robotics Challenge #8
Your individual Choice Creation:
Constraints:
1. Student sets the constraints2. Challenge must be commensurate with student abilities in both building and programming.3. Attached are potential ideas:
Elements Weight 5 Points 4 Points 3 Points 2 Points 1 – 0 Points Total
Concept Sketches Concept sketches are included. Design development and subsequent modifications are shown.
Concept sketches are included. Design development shown. Some subsequent modifications shown.
Concept sketches are included. Design development shown. No subsequent modifications shown.
Concept sketches are included. Design development vaguely shown. No subsequent modifications shown.
Concept sketches are incomplete or missing.
Final sketch
Can recognize robot from final sketch, everything properly labeled.
Can recognize robot from final sketch, everything not properly labeled.
Doesn’t look like robot, not labeled.
poorly done, incomplete
Non-existent
ConstraintsAll constraints created
Verbal only. Didn’t create Didn’t write or follow constraints.
Missing, or incomplete

Cortex mapComplete updated cortex map
Incorrect parts of map
Started, but incomplete
Incomplete missing
Programming
Finalized Easy C program emailed or printed
Shown to us, but never finalized.
Inadequate programming functions
Only remote programming.
Never programmed
Function
Moved and rotated the block. Starts automatically
Moved but didn’t rotate
Doesn’t start automatically
Poor design, but built
Not working
Possible Ideas:
A VEX clock, mechanical or digital
Line follower robot
Rope traversing robot.
Walking robot
Table bot that drives, but won't fall off
Auto whiteboard eraser robot.
VEX manual transmission
auto rubber stamping machine
VEX pinball machine (w/pneumatics)
Vex auto pencil sharpener
Build the IQ robot.
Robot that can perform the “StarStruck” competition.
VEX “Connect Four” Robot (see youtube)
Ball that never stops https://www.youtube.com/watch?v=ExJ6D7r0ung&list=PL2x9NEZfxJkcqdBxgFogMriwXPWrx28QW&index=40
Robotic arm extension
Basketball Robot

VEX “Nothing But Net” 2016 competition
Stair Climber
Ferris Wheel
Self loading and self shooting bow and arrow
Repeating Rubber Band Launcher
Bus token dispensing machine (guidance requested)
Pair of Automatic “rock em sock em” robots
VEX record player (will need needle and amplifier
Strandbeast Tomahawk Robot
4th quarter Robotics Programming Test.Robot must do the following:
1. Start button (digital #1) starts the bot.2. Motors (ports 1 & 12), which are pointing in opposite direction, must drive the bot forward.3. When the line follower (analog #1)detects an obstacle with a value of ___<400_______ it will
stop the robot.4. The bot will then move backward for 1 second and turn away from the wall.5. The whole process will repeat 3 times.
When your program is completed show Leider or Groessel upload it and test.Works 1st try 100%One missing function 90%Two missing function 80%Never fully works, but does part of the program 70%Can only program with help 60%Nothing 50%

Front, bottom viewFront, top view