ΤΕΙ ΠΕΙΡΑΙΑ ΤΜΗΜΑ...
TRANSCRIPT

1
ΤΕΙ ΠΕΙΡΑΙΑ ΤΜΗΜΑ
ΑΥΤΟΜΑΤΙΣΜΟΥ
ΠΤΥΧΙΑΚΗ : ΕΛΕΓΧΟΣ ΚΑΙ ΣΤΑΘΕΡΟΠΟΙΗΣΗ ΘΕΡΜΟΚΡΑΣΙΑΣ ΜΕ ΧΡΗΣΗ ΣΥΣΤΗΜΑΤΟΣ ΤΗΛΕΠΟΠΤΟΙΑΣ ΚΑΙ ΤΗΛΕΧΕΙΡΙΣΜΟΥ ΕΠΙΒΛΕΠΩΝ: ΤΣΕΛΕΣ ΔΗΜΗΤΡΙΟΣ ΕΙΣΗΓΗΤΗΣ : ΝΙΚΟΛΑΟΥ ΓΡΗΓΟΡΙΟΣ ΕΡΕΥΝΗΤΙΚΗ ΕΡΓΑΣΙΑ ΤΩΝ ΣΠΟΥΔΑΣΤΩΝ ΧΑΤΖΗΙΩΑΝΝΟΥ ΙΩΑΝΝΗΣ Α.Μ 31034 ΓΙΑΜΑΡΕΛΟΣ ΓΕΩΡΓΙΟΣ Α.Μ 29007

2
ΠΕΡΙΛΗΨΗ
Το έγγραφο αυτό αποτελεί πτυχιακή εργασία, της οποίας αντικείμενο είναι η έρευνα, η μελέτη και η κατασκευή ενός συστήματος ελέγχου τηλεποπτείας και τηλεχειρισμού κτιριακού συγκροτήματος μέσω ηλεκτρονικού υπολογιστή. Τα τελευταία χρόνια η ανάπτυξη στον κτιριακό αυτοματισμό είναι ραγδαία είτε σε αυτόν κατατάσσονται εργοστάσια, βιοτεχνίες, βιομηχανίες είτε διαμερίσματα, βίλες, καταστήματα, ξενοδοχεία, εμπορικά κέντρα κ.λ.π. Είναι ένα ευέλικτο σύστημα το οποίο όχι μόνο μπορεί να εφαρμοστεί σε οποιονδήποτε χώρο
μας ενδιαφέρει, αλλά μπορούμε επίσης να ορίσουμε όσες και όποιες λειτουργίες θέλουμε. Αυτό όμως δεν μπορεί να το κάνει ο τελικός χρήστης καθώς χρειάζονται γνώσεις αυτοματισμού, προγραμματισμού PLC και SCADA εφόσον όλο το σύστημα λειτουργεί βάση αυτών των δύο. Μπορεί όμως ο τελικός χρήστης να απαιτήσει από τον κατασκευαστή, ο ίδιος τις λειτουργίες που επιθυμεί. ∆εν είναι απαραίτητο, να συνδέσουμε την λέξη “συγκροτήματα” με κάποιον αριθμό κτιρίων. Το σύστημα μας θα μπορούσε κάλλιστα να εφαρμοστεί και σε ένα μόνο κτίριο ,διαμέρισμα, κατάστημα ,σκάφος , εργοστάσιο κ.λ.π αποδίδοντας εξίσου καλά . Η δομή της πτυχιακής χωρίζεται σε τέσσερις ενότητες στην πρώτη ενότητα έχουμε κάποια θεωρητικά στοιχεία για τον ελεγκτή PID αλλά και τους επιμέρους ελεγκτές που από την συνένωση τους προκύπτει ο ελεγκτής PID. Στην δεύτερη ενότητα έχουμε κάποια θεωρητικά στοιχεία για τα συστήματα SCADA , στην τρίτη ενότητα έχουμε το περιβάλλον εργασίας της εφαρμογής SCADA και στην τέταρτη έχουμε το εγχειρίδιο οδηγιών

3
(instruction manual) που περιλαμβάνει τα χαρακτηριστικά του μηχανήματος αλλά και τους πίνακες με τις εντολές για την δημιουργία του κώδικα . Η γλώσσα προγραμματισμού που χρησιμοποιήσαμε είναι η WIN LOG της SIELCO.
ΠΕΡΙΕΧΟΜΕΝΑ Μέρος Α Ελεγκτής PID αλλά και ανάπτυξη άλλων ελεγκτών σελ. 4 – 16 1.1 Ελεγκτής PID 1.2 Μαθηματική διερεύνηση του P ελεγκτή 1.3 Μαθηματική διερεύνηση του I ελεγκτή 1.4 Μαθηματική διερεύνηση του D ελεγκτή 1.5 Μαθηματική διερεύνηση του PID ελεγκτή 1.6 Μαθηματική διερεύνηση του PI ελεγκτή 1.7 Μαθηματική διερεύνηση του PD ελεγκτή Μέρος Β Συστήματα τηλεποπτοίας και τηλεχειρισμού (SCADA) σελ. 17 – 27 2.1 Εισαγωγή 2.2 Τι σημαίνει η λέξη SCADA 2.3 Αρχιτεκτονική 2.4 Λειτουργία 2.5 Ανάπτυξή εφαρμογής 2.6 Εξέλιξη 2.7 Εφαρμοσμένη μηχανική 2.8 Πιθανά οφέλη SCADA Μέρος Γ Περιβάλλον εργασίας εφαρμογής SCADA σελ. 28 - 41 Μέρος ∆ Εγχειρίδιο οδηγιών σελ. 42 – 76 4.1 Έλεγχος συσκευασίας 4.2 ∆ιαστάσεις 4.3 Μέθοδος κατασκευής

4
4.4 Ηλεκτρική καλωδίωση 4.5 Λειτουργία 4.5.1 Παρουσίαση – Εισαγωγή 4.5.2 ∆ιαμόρφωση εισόδου 4.5.3 Ρύθμιση των εξόδων διαμόρφωσης 4.5.4 ∆ιαμόρφωση του επιθυμητού σημείου 4.5.5 ∆ιαμόρφωση ελέγχου 4.5.6 ∆ιαμόρφωση προειδοποίησης 4.6 Ξεκίνημα στον προγραμματισμό σειράς 4.7 Επίβλεψη 4.8 Αυτοελεγχόμενη φωτοδίοδος 4.9 ∆ιεπαφή χρήστη 4.9.1 Εισαγωγή 4.9.2 Πίνακας διαχείρισης 4.9.3 Πληκτρολόγιο 4.9.4 Φωτοδίοδος πρόσοψης 4.9.5 Εξ’ ορισμού σελίδα 4.9.6 Κυρίως μενού 4.9.7 Επίβλεψη 4.9.8 Προγραμματισμός 4.9.9 ∆ιαμόρφωση 4.9.10 ∆ιάγνωση 4.9.11 Επίβλεψη μέσω υπολογιστή 4.10 Λίστα πυλών
ΜΕΡΟΣ Α
1.1 Ελεγκτής PID Ο ελεγκτής είναι μια συσκευή , η οποία στην είσοδο της δέχεται τις διαφορές από την σύγκριση της ελεγχόμενης μεταβλητής με την επιθυμητή τιμή και ανάλογα με την

5
συνάρτηση μεταφοράς που τον χαρακτηρίζει σχηματίζει το ρυθμιστικό σήμα yr(t) που είναι το σήμα εξόδου του ελεγκτή . Ο PID ελεγκτής είναι μια συσκευή η οποία περιλαμβάνει ένα ελεγκτή P ένα ελεγκτή I και ένα ελεγκτή D και περιλαμβάνει τα πλεονεκτήματα των τριών αυτών ελεγκτών και κανένα από τα μειονεκτήματα τους. Ο P ελεγκτής είναι ο απλούστερος ελεγκτής συνεχούς λειτουργίας. Ο χαρακτηρισμός του ελεγκτή σαν αναλογικός (proportional) οφείλεται στην αναλογική σχέση μεταξύ των σημάτων εισόδου – εξόδου του ελεγκτή . Το ρυθμιστικό σήμα ακολουθεί τη μεταβολή της ρυθμιστικής διαφοράς (xd) χωρίς χρονική καθυστέρηση . Επομένως ισχύει η σχέση Yr(t) – y0 = Kp [w(t) –y(t) ] = Kp *xd(t) Ή Yr(t) = Kp * xd(t) (y0 = 0) y0 είναι η τιμή του ρυθμιστικού σήματος ,όταν η διαφορά xd = w(t) – y(t) = 0 H τιμή του y0 ρυθμίζεται κατά την θέση σε λειτουργία και μπορεί να λάβει διάφορες τιμές ακόμα και μηδέν. Kp καλείται αναλογικός συντελεστής ή απλώς ενίσχυση του ελεγκτή. Οι αναλογικοί ελεγκτές δέχονται στην είσοδο τους σήματα , τα οποία βρίσκονται εντός τυποποιημένων ορίων σύμφωνα με τις προδιαγραφές VDE Πχ για ηλεκτρικούς ελεγκτές ισχύει -10V – 10V 0 – 20 mA 4 – 20 mA 0.2-1 bar (πνευματικοί ελεγκτές ) Τυποποιημένα είναι επίσης και τα όρια του ρυθμιστικού σήματος yr(t) . To ρυθμιστικό σήμα κυμαίνεται μεταξύ των παρακάτω ορίων : 0 V – 10 V 0 – 20 mA 4 – 20 mA 0.2-1 bar (πνευματικοί ελεγκτές )

6
Σχ . Α.1 ) Έλεγχος θερμοκρασίας με πνευματικό ελεγκτή. Αναλογική περιοχή Xp και (xp%) : Με τον όρο αναλογική περιοχή εννοούμε το εύρος της μεταβολής , την οποία πρέπει να υποστεί η ελεγχόμενη μεταβλητή x(t) με σταθερό οδηγό μέγεθος w(t) για να διατρέξει τo ρυθμιστικό σήμα (ή ο ρυθμιζόμενος μηχανισμός ) ολόκληρη την περιοχή ρύθμισης (πχ από την πάνω μέχρι την κάτω οριακή θέση μίας βαλβίδας ή ενός υδατοφράκτη Εντός της αναλογικής περιοχής Xp διατηρείται η αναλογική σχέση μεταξύ του ρυθμιστικού σήματος yr(t) και της ρυθμιστικής διαφοράς xd .Μεταβάλλοντας την ενίσχυση (Kp) του ελεγκτή P και διατηρώντας το οδηγό μέγεθος σταθερό λαμβάνουμε ένα σμήνος στατικών χαρακτηριστικών Σχ Α.2 .
Σχ. Α.2) Σμήνος στατικών χαρακτηριστικών ενός ελεγκτή P με παράμετρο την ενίσχυση ή την αναλογική περιοχή. Όπου Yh = περιοχή ρύθμισης Xp = αναλογική περιοχή Y0 = τιμή του ρυθμιστικού σήματος όταν Υmax = μέγιστη οριακή τιμή του ρυθμιστικού σήματος Ymin = ελάχιστη οριακή τιμή του ρυθμιστικού σήματος Ymax =Y0 + Kr *xdmax (Kr = Kp) Ymin =Y0 + Kr*xdmin

7
Yh = Kr* xp Και Kr = Yh / xp ή xp= Yh/ Kr Παραμένουσα ρυθμιστική απόκλιση (σφάλμα Xdb = e) Από την διαφορική εξίσωση του ελεγκτή διαπιστώνει κανείς εύκολα , ότι για να γίνει μια μεταβολή του ρυθμιστικού σήματος Yr(t) πρέπει να υπάρχει στην είσοδο του ελεγκτή πάντα μια ρυθμιστική απόκλιση την οποία θα καλούμε παραμένουσα ρυθμιστική απόκλιση ή σφάλμα .Η απαιτούμενη για μια μεταβολή του ρυθμιστικού σήματος παραμένουσα ρυθμιστική απόκλιση είναι τόσο μικρότερη , όσο μεγαλύτερος είναι ο συντελεστής ενίσχυσης Kp. 1.2 Μαθηματική διερεύνηση P ελεγκτή Εάν διεγείρουμε τον ελεγκτή P με ένα βηματικό σήμα Xd(t) = xd0 * σ(τ) Τότε λαμβάνουμε στην έξοδο του ελεγκτή την βηματική απόκριση Yr(t) = Kr * xd(t) ¨Η Yr(t) = Kr * xd0 * σ(t) Εάν αναγάγουμε το ρυθμιστικό σήμα στο ύψος του σήματος εισόδου τότε λαμβάνουμε την μεταβατική συνάρτηση [h(t) ] H(t) =yr(t)/xd0 = Kp* σ(t)

8
Σχ.Α.3) Βηματική και μεταβατική απόκριση του ελεγκτή P. Το block διάγραμμα του ελεγκτή P δίνεται παρακάτω
Σχ. Α.4) block διάγραμμα του ελεγκτή P Η συνάρτηση μεταφοράς δίνεται από την σχέση Gr(s) = Yr(s)/xd(s) = Kp O ελεγκτής Ι χωρίς χρονική καθυστέρηση του ρυθμιστικού σήματος yr(t) δημιουργεί το ρυθμιστικό δια της χρονικής ολοκλήρωσης της ρυθμιστικής απόκλισης xd(t). Από την χρονική αυτή συμπεριφορά του έλαβε προφανώς και την ονομασία του . Η διαφορική εξίσωση του ελεγκτή Ι χωρίς χρονική καθυστέρηση είναι Yr(t) = Ki * S xd(t) * dt (15) Εάν η ρυθμιστική διαφορά είναι ένα σταθερό μέγεθος τότε η διαφορική εξίσωση λαμβάνει την απλούστερη μορφή της Yr(t) = Kir * xd0 *t Yr = f(t)

9
Σχ.Α.5 ) Βηματικές αποκρίσεις ελεγκτή Ι Παραγωγίζοντας και τα δύο μέλη της σχέσης 15 λαμβάνουμε την σχέση dYr(t)/dt =Kir *xd η οποία μας φανερώνει τον ρυθμό μεταβολής του ρυθμιστικού σήματος . Από την παραπάνω σχέση διαπιστώνουμε, ότι ο ρυθμός μεταβολής του ρυθμιστικού σήματος είναι ανάλογος της ρυθμιστικής διαφοράς (xd) . Για μικρές τιμές της ρυθμιστικής διαφοράς xd ο ρυθμός μεταβολής είναι μικρός και για μεγάλες είναι μεγάλος .Συγκρίνοντας τις διαφορικές εξισώσεις και τις στατικές χαρακτηριστικές των ελεγκτών P και I παρατηρούμε , ότι Για t =0 Α) xd = xd0=>Yr = Kr *Xd0 Ελεγκτής P Β) xd =xd0=>Yr =0 Ελεγκτής I Oι σχέσεις (α) και (β) μας οδηγούν στο συμπέρασμα , ότι ο ελεγκτής I είναι αργός . Επομένως το ρυθμιστικό σήμα υφίσταται εφόσον υπάρχει η ρυθμιστική διαφορά (xd) Στην είσοδο του ελεγκτή . Όταν η ρυθμιστική διαφορά xd μηδενιστεί τότε μηδενίζεται και το ρυθμιστικό σήμα (Yr). Συμπέρασμα :

10
Ο ελεγκτής Ι έχει την ικανότητα να μηδενίζει την ρυθμιστική διαφορά (xd) . Επομένως δεν υφίσταται παραμένουσα ρυθμιστική απόκλιση , η οποία υπάρχει στον ελεγκτή P και αποτελεί μειονέκτημα αυτού . 1.3 Μαθηματική διερεύνηση του ελεγκτή I Η διαφορική εξίσωση του ελεγκτή Ι είναι Yr = 1/Tir S xd * dt <-> yr =1/s*tir* xd To Tir είναι τεχνικό χαρακτηριστικό του ελεγκτή I και φανερώνει τον χρόνο που απαιτεί ο ελεγκτής για να φθάσει το ρυθμιστικό σήμα στην ίδια τιμή με την ρυθμιστική διαφορά xd0 . Στους τυποποιημένους ελεγκτές , όπου το εύρος μέτρησης της ρυθμιστικής διαφοράς xd είναι ίσο και των αυτών μονάδων με το εύρος μέτρησης του ρυθμιστικού σήματος yh , ο χρόνος ολοκλήρωσης υπολογίζεται από την σχέση Tir =1/Kir Oπότε η συνάρτηση μεταφοράς του ελεγκτή I είναι Gr = y(s)/xd(s) = 1/s*Tir
Σχ Α.6) Σύμβολο βαθμίδας του ελεγκτή Ι Ο ελεγκτής D είναι ακατάλληλος για να εκτελέσει από μόνος του την εργασία του αυτόματου ελέγχου . Συνήθως συνεργάζεται με άλλους ελεγκτές με σκοπό να εξουδετερώσει κάποιο μειονέκτημα αυτών . 1.4 Mαθηματική διερεύνηση του ελεγκτή D Το ρυθμιστικό σήμα yr(t) ενός ελεγκτή D είναι ανάλογο της παραγώγου της ρυθμιστικής διαφοράς xd(t) και περιγράφεται από την διαφορική εξίσωση Yr(t) = y0 + Kd* dxd(t)/dt Yr(t) –y0 = Kd*dx(t)/dt Yr(t) = Kd*dx(t)/dt Όπου Kd είναι ο διαφορικός συντελεστής του ελεγκτή

11
Η συνάρτηση μεταφοράς του ελεγκτή είναι Gr(s) = Kd*s
Σχ Α.7) βηματική διέγερση και μεταβατική συνάρτηση ελεγκτή D
Σχ Α.8) σύμβολο ελεγκτή D Διέγερση ελεγκτή D με μια ανωφερική διέγερση xd(t) = Ki* t : L Yr(t) = Kd * s* Lxd(t) Lxdt) = Ki/s^2 Lyr(t) =Kd*Ki/s.

12
Σχ. Α.9) Ανωφερική διέγερση και μεταβατική συνάρτηση του ελεγκτή D Εάν συνδέσουμε παράλληλα τους τρεις βασικούς ελεγκτές P,I,D τότε λαμβάνουμε τον ελεγκτή PID του σχ. Α.10.

13
Σχ.Α.10) Block διάγραμμα του ελεγκτή PID 1.5 Μαθηματική διερεύνηση του PID ελεγκτή Ως εκ τούτου ο ελεγκτής διέπεται από την παρακάτω διαφορική εξίσωση Yr(t) = y0 + Kp* xd(t) + Ki Sxd(t)*dt + Kd * dxd(t)/dt Yr(t)- y0 = Kp*xd(t) +Ki Sxd(t) *dt + Kd * dxd(t)/dt ¨Η Υ0 = 0 Υr(t) = Kp*xd(t) + Ki Sxd(t)*dt + Kd * dxd(t)/dt (1) Ο ελεγκτής PID συνδυάζει τα πλεονεκτήματα ενός PI και PD ελεγκτή. Δηλαδή αφ’ενός μεν δεν εμφανίζει το μειονέκτημα της παραμένουσας ρυθμιστικής απόκλισης, αφ’ετέρου δε έχει μεγάλη ρυθμιστική ταχύτητα . Βγάζουμε τον συντελεστή ενίσχυσης (Κr) της σχέσης 1 εκτός παρενθέσεως και λαμβάνουμε την γενική διαφορική εξίσωση του ελεγκτή PID . Yr(t) = Kp(xd(t) + 1/Tn S xd(t)*dt+Tv*dxd(t)/dt) Όπου

14
Tn = χρόνος επαναρύθμισης Τv = χρόνος προπορείας Tn = Kp/Ki και Tv = Kd/Kp Η συνάρτηση μεταφοράς του ελεγκτή PID είναι: Gr(s) = L yr(t)/Lxd(t) = Kp(1+1/s*Tv+ s*Tv) H Κατά Laplace μετασχηματισμένη του ρυθμιστικού σήματος προκύπτει από την σχέση Lyr(t) = Kp(1+1/sTv + s*Tv) * Lxd(t)
Σχ.Α.11) Βηματική διέγερση και μεταβατική απόκριση του ελεγκτή PID
Σχ .Α.12) Σύμβολο του ελεγκτή PID Ο ελεγκτής PI προκύπτει δια της παραλλήλου σύνδεσης του ελεγκτή P και I. O ελεγκτής P ως γνωστόν παρουσιάζει μεγάλη ταχύτητα ρύθμισης και μάλιστα χωρίς Χρονική καθυστέρηση , αλλά όμως μειονεκτεί , διότι δεν είναι σε θέση να μηδενίσει την διαφορά μεταξύ της ελεγχόμενης μεταβλητής και της επιθυμητής τιμής με αποτέλεσμα την ύπαρξη του σφάλματος.

15
Με την παράλληλη σύνδεση του ελεγκτή I , ο οποίος εμφανίζει το πλεονέκτημα της ακριβούς ρύθμισης αφενός και το μειονέκτημα του αργού ρυθμού ρύθμισης αφετέρου , λαμβάνουμε έναν νέο ελεγκτή με τα πλεονεκτήματα των δύο ελεγκτών P και I και χωρίς τα μειονεκτήματα αυτών.
Σχ.Α.13) Διάγραμμα βαθμίδων ελεγκτή PI 1.6 Μαθηματική διερεύνηση του PI ελεγκτή H διαφορική εξίσωση του ελεγκτή PI προκύπτει από το διάγραμμα βαθμίδων του σχ.3.25 Yr(t) = Y0 + Kxd(t)+ KiSxd(t) (2) =>Yr(t) = Kr[xd(t) + 1/Tn *Sxd(t) *dt] (3) με Y0 = 0 και Tn = χρόνος επαναρύθμισης = χρόνος επιπορείας Tn = Kr/Ki Συνάρτηση μεταφοράς του PI ελεγκτή LYr(t) = Kp[1+1/s*Tn] * Lxd(t) (4) Gr(s) = LYr(t)/Lxd(t)= Kp[1+1/s*Tn]=Kp[1+s*Tn/s*Tn] Aντικαθιστούμε την κατά Laplace μετασχηματισμένη της ρυθμιστικής διαφοράς στην σχέση (38) LYr(t) = Kr[1+1/s*Tn] xd0/s και με την του πίνακα L λαμβάνουμε την μεταβατική συνάρτηση του ελεγκτή PI H(t)= Yn(t)/xd0 = Kp[σ(t)+ 1/Tn*t]

16
Σχ.Α.14) Βηματική διέγερση και μεταβατική απόκριση του ελεγκτή PI
Σχ.Α.15) Σύμβολο ελεγκτή PI Στον ελεγκτή PD συνυπάρχει η αναλογική και διαφορική δράση των ελεγκτών P και D . Mε την προσθήκη του διαφορικού στοιχείου στον ελεγκτή P το ρυθμιστικό σήμα yr(t) είναι αφενός μεν ανάλογο της ρυθμιστικής διαφοράς xd(t) και αφετέρου ανάλογο της ταχύτητας μεταβολής της ρυθμιστικής διαφοράς dxd(t)/dt.Επομένως δια της προσθήκης της διαφορικής βαθμίδας επιτυγχάνουμε επιτάχυνση του ρυθμιστικού φαινομένου και μείωση του νεκρού χρόνου εφόσον το σύστημα εμφανίζει νεκρό χρόνο.

17
Σχ.Α.16)Block διάγραμμα του ελεγκτή PD 1.7 Μαθηματική διερεύνηση του PD ελεγκτή H εξίσωση του ελεγκτή είναι Yr(t) = Y0 + Kp * xd(t) + Kdr* dxd(t)/dt Ή Υr(t) = Kp*xd(t) + Kdr*dxd(t)/dt ¨Όπως στον ελεγκτή PI έτσι και στον ελεγκτή PD το ρυθμιστικό σήμα δεν προκύπτει από την άθροιση των εξόδων των ελεγκτών P και D αλλά από την παραγοντική μορφή της διαφορικής εξίσωσης. Yr(t) = Kp[xd(t) + Tv*dxd(t)/dt] Tv = Kdr/Kp = χρόνος προπορείας. Συνάρτηση μεταφοράς του ελεγκτή PD Gr(s) = Kp*(1+Tv*s)
Σχ.Α.17) Σύμβολο ελεγκτή PD

18
ΜΕΡΟΣ Β
ΤΙ ΕΙΝΑΙ ΤΟ SCADA ;
Γενικά Ένα βιομηχανικό σύστημα SCADA θα χρησιμοποιηθεί για την ανάπτυξη ελέγχου των τεσσάρων πειραμάτων LHC. Αυτό το έγγραφο περιγράφει τα συστήματα SCADA από την άποψη της αρχιτεκτονικής τους, της διεπαφής τους στο υλικό διαδικασίας, τη λειτουργία και τις εγκαταστάσεις ανάπτυξης εφαρμογής που παρέχουν. Κάποια προσοχή δίνεται επίσης στα βιομηχανικά πρότυπα στα οποία τηρούν, στη προγραμματισμένη εξέλιξή τους καθώς επίσης και στα πιθανά οφέλη της χρήσης τους.
2.1 Εισαγωγή
Στις 20 του Σεπτεμβρίου 2000, η Επιτροπή χρηματοδότησης ενέκρινε την πρόταση να διαπραγματευτεί μια σύμβαση με την ETM A.G. (Eisenstadt, Αυστρία) για τον ανεφοδιασμό συστημάτων SCADA της ETM και την ανάπτυξη των συστημάτων ελέγχου των εταιριών ALICE, ATLAS, CMS και LHCb. Επιπλέον η ομάδα εργασίας SCADA, που οργανώθηκε από το Κέντρο ερευνών (CERN) ελέγχει τον πίνακα, συστήνει PVSS ως ένα από τα προϊόντα SCADA για την ανάπτυξη από τα μελλοντικών συστημάτων ελέγχου στο κέντρο (CERN). Αυτές οι αποφάσεις είναι η ολοκλήρωση περίπου δέκα τριών ανθρωπό-ετών (FTE) της προσπάθειας - που εκτείνεται κατά τη διάρκεια περισσότερο από τρία έτη για να προσδιοριστεί και να αξιολογηθεί ένα κατάλληλο βιομηχανικό σύστημα ελέγχου που αντιμετωπίζει τις ακραίες απαιτήσεις ενέργειας των φυσικών πειραμάτων όπως είναι τα LHC. Ευρέως χρησιμοποιημένα στη βιομηχανία για τον εποπτικό έλεγχο και την απόκτηση στοιχείων των βιομηχανικών διαδικασιών, τα συστήματα SCADA τώρα επίσης ξεπερνούν τα πειραματικά εργαστήρια φυσικής για τους ελέγχους των

19
βοηθητικών συστημάτων όπως η ψύξη, ο εξαερισμός, η διανομή δύναμης, κ.λπ. Πιό πρόσφατα υποβλήθηκαν αιτήσεις επίσης για τους ελέγχους των μικρότερων ανιχνευτών μεγέθους μορίων όπως ο L3 ανιχνευτής και το πείραμα NA48 , για την ονομασία δύο παραδειγμάτων κατά (CERN). Τα συστήματα SCADA έχουν σημειώσει ουσιαστική πρόοδο κατά τη διάρκεια των πρόσφατων ετών από άποψη της λειτουργίας, της εξελιξιμότητας, της απόδοσης και της ειλικρίνειας τους έτσι ώστε να είναι μια εναλλακτική λύση για την εξέλιξη στο σπίτι ακόμη και πολύ σύνθετων συστημάτων ελέγχου όπως εκείνων των πειραμάτων φυσικής.
2.2 Τι σημαίνει η λέξη SCADA
Ένα σύστημα SCADA χρησιμοποιείται για τον εποπτικό έλεγχο και την απόκτηση στοιχείων. Όπως το όνομα δείχνει, δεν είναι ένα πλήρες σύστημα ελέγχου, αλλά εστιάζει στο εποπτικό επiπεδο. Υπό αυτήν τη μορφή, είναι ένα καθαρά πακέτο λογισμικού που τοποθετείται πάνω από το υλικό στο οποίο διασυνδέεται, γενικά μέσω των ελεγκτών προγραμματίσημης λογικής (PLCs), ή άλλων εμπορικών ενοτήτων υλικού. Τα συστήματα SCADA χρησιμοποιούνται όχι μόνο στις βιομηχανικές διαδικασίες: π.χ. χαλυβουργική, ηλεκτρική παραγωγή (συμβατική και πυρηνική) και διανομή, χημεία, αλλά και σε μερικές πειραματικές εγκαταστάσεις όπως η πυρηνική τήξη. Το μέγεθος τέτοιων εγκαταστάσεων κυμαίνεται από μερικές χιλιάδες έως αρκετές δεκάδες χιλιάδες που εισάγονται ως κανάλια εισόδου - εξόδου (I/O). Εντούτοις, τα συστήματα SCADA εξελίσσονται γρήγορα και εισάγουν τώρα στην αγορά των εγκαταστάσεων διάφορα κανάλια I/O αρκετών εκατoντάδων Κilo (K) ξέρουμε επίσης για δύο περιπτώσεις που βρίσκονται σε ανάπτυξη με κανάλια I/O έως και ενός Mega (M).

20
Τα συστήματα SCADA χρησιμοποιούνται για να τρέξουν στα DOS, VMS και στο Unix τα τελευταία χρόνια όλοι οι προμηθευτές SCADA έχουν κινηθεί προς NT και μερικά επίσης προς Linux.
2.3 Αρχιτεκτονική
Αυτό το τμήμα περιγράφει τα κοινά χαρακτηριστικά γνωρίσματα των προϊόντων SCADA που έχουν αξιολογηθεί στο Κέντρο (CERN) λαμβάνοντας υπόψη την πιθανή εφαρμογής τους στα συστήματα ελέγχου των ανιχνευτών LHC [ 1 ] ..2 ]. 2.3.1 Αρχιτεκτονική υλικού ¨Ένα σύστημα SCADA διακρίνεται σε δύο βασικά στρώματα το "στρώμα πελατών" που φροντίζουν για την αλληλεπίδραση μηχανών ατόμων και το "στρώμα κεντρικών υπολογιστών στοιχείων" που χειρίζεται τα περισσότερα από τα στοιχεία διαδικασίας τα οποία ελέγχουν τις δραστηριότητες. Οι κεντρικοί υπολογιστές στοιχείων επικοινωνούν με τις συσκευές μέσω των ελεγκτών διαδικασίας. Οι ελεγκτές διαδικασίας, π.χ. PLCs, συνδέονται με τους κεντρικούς υπολογιστές στοιχείων είτε άμεσα είτε μέσω των δικτύων είτε μέσω αρτηριών πεδίου (fieldbuses) που είναι ιδιόκτητες (π.χ. Siemens H1), ή μη ιδιόκτητες (π.χ. Profibus). Οι κεντρικοί υπολογιστές στοιχείων συνδέονται ο ένας με τον άλλον και με τους σταθμούς πελατών μέσω του τοπικού δικτύου LAN Ethernet. Οι κεντρικοί υπολογιστές στοιχείων και οι σταθμοί πελατών είναι πλατφόρμες NT αλλά για πολλά προϊόντα οι σταθμοί πελατών μπορούν επίσης να είναι W95 μηχανές. Το σχήμα 1 παρουσιάζει χαρακτηριστική αρχιτεκτονική υλικού.

21
Figure 1: Typical Hardware Architecture 2.3.2 Αρχιτεκτονική λογισμικού Τα προϊόντα είναι πολλαπλών καθηκόντων και είναι βασισμένα σε μια βάση δεδομένων σε πραγματικό χρόνο (RTDB) που βρίσκεται σε έναν ή περισσότερους κεντρικούς υπολογιστές. Οι κεντρικοί υπολογιστές είναι αρμόδιοι για τα στοιχεία (απόκτηση και χειρισμός τους) (π.χ. ελεγκτές, συναγερμός που ελέγχουν, υπολογισμοί, αναγραφή και αρχειοθέτηση ψηφοφορίας) σε ένα σύνολο παραμέτρων, χαρακτηριστικά εκείνοι που συνδέονται είναι:

22
Σχημα Β 2: Generic Software Architecture
Εντούτοις, είναι δυνατό να έχουν αφιερωθεί οι κεντρικοί υπολογιστές για τους ιδιαίτερους στόχους, π.χ. ιστορικός, datalogger, χειριστής συναγερμών. Το σχέδιο 2 παρουσιάζει αρχιτεκτονική SCADA που είναι γενική για τα προϊόντα που αξιολογήθηκαν. 2.3.3 Επικοινωνίες Εσωτερική επικοινωνία Η επικοινωνία υπολογιστής-πελατών και υπολογιστής-κεντρικών υπολογιστών βασίζεται σε μια σχέση έκδοσης-περιγραφής που χρησιμοποιεί ένα πρωτόκολλο TCP/*IP, δηλ., μια εφαρμογή πελατών προσυπογράφει σε μια παράμετρο που είναι κύρια από μια ιδιαίτερη εφαρμογή κεντρικών υπολογιστών και αλλάζει μόνο σε εκείνη την παράμετρο με την οποία επικοινωνούν με την εφαρμογή πελατών. Πρόσβαση στις συσκευές Οι κεντρικοί υπολογιστές στοιχείων επιλέγουν τους ελεγκτές σε ένα χρησιμοποιούμενο μέσω ενός ποσοστού επιλογής. Το ποσοστό επιλογής μπορεί να είναι διαφορετικό για διαφορετικές παραμέτρους. Οι ελεγκτές περνούν τις

23
ζητούμενες παραμέτρους στους κεντρικούς υπολογιστές στοιχείων. Η χρονική επιλογή των παραμέτρων διαδικασίας εκτελείται χαρακτηριστικά στους ελεγκτές και αυτό ο χρόνος επιλογής (time-stamp) αναλαμβάνεται από τον κεντρικό υπολογιστή στοιχείων. Εάν ο ελεγκτής και το πρωτόκολλο επικοινωνίας χρησιμοποιήσουν την εκούσια μεταφορά στοιχείων έπειτα τα προϊόντα θα υποστηρίξουν αυτό επίσης. Τα προϊόντα παρέχουν τους οδηγούς επικοινωνίας για το μεγαλύτερο μέρος των PLCs και των ευρέως χρησιμοποιημένων αρτηριών πεδίου (fieldbuses), π.χ., Modbus. Από τα τρία fieldbuses που συστήνονται στο Κέντρο (CERN), το Profibus και το Worldfip υποστηρίζονται αλλά το CANbus συχνά όχι [ 3 ]. Μερικοί από τους οδηγούς είναι βασισμένοι στα προϊόντα τρίτων (π.χ., κάρτες Applicom) και επομένως έχουν συμπληρωματικό κόστος . To VME δεν είναι υποστηρίξιμο Ένας συνηθισμένος κεντρικός υπολογιστής στοιχείων μπορεί να υποστηρίξει τα πολλαπλά πρωτόκολλα επικοινωνιών: μπορεί γενικά να υποστηρίξει τόσα πολλά πρωτόκολλα όσες είναι οι θέσεις για τις κάρτες διεπαφών. Η προσπάθεια που απαιτείται για την ανάπτυξη νέων οδηγών είναι περίπου 2-6 εβδομάδες ανάλογα με την πολυπλοκότητα και την ομοιότητα με τους υπάρχοντες οδηγούς, επίσης ένα κουτί με εργαλεία ανάπτυξης οδηγών παρέχεται για αυτό. 2.3.4 Διασύνδεση Διεπαφές εφαρμογής/επισκόπησης Η παροχή λειτουργίας πελατών OPC για SCADA για να έχει πρόσβαση στις συσκευές κατά τρόπο ανοικτό και τυποποιημένο αναπτύσσεται. Ακόμα φαίνεται να υπάρχει μια έλλειψη συσκευών/ελεγκτών, που παρέχουν το λογισμικό κεντρικών υπολογιστών OPC, αλλά αυτό βελτιώνεται γρήγορα δεδομένου ότι οι περισσότεροι από τους παραγωγούς των ελεγκτών περιλαμβάνονται ενεργά στην ανάπτυξη αυτών των προτύπων. Το OPC έχει αξιολογηθεί από το Κέντρο (CERN)-IT-CO [ 4 ]. Τα προϊόντα παρέχουν επίσης
• Μια ανοικτή διεπαφή συνδετικότητας βάσεων δεδομένων (ODBC) στα στοιχεία archive/logs, αλλά όχι στη βάση δεδομένων διαμόρφωσης,
• Μια δυνατότητα εισαγωγών/εξαγωγών ASCII για τα στοιχεία διαμόρφωσης,

24
• Mια βιβλιοθήκη APIs που υποστηρίζει την C, την C ++, και την visual basic (VB) στα στοιχεία πρόσβασης στο RTDB, archive/logs. Το API συχνά δεν παρέχει την πρόσβαση στα εσωτερικά χαρακτηριστικά γνωρίσματα του προϊόντος όπως ο χειρισμός συναγερμών, η υποβολή έκθεσης, η τάση, κ.λπ....
Τα προϊόντα H/Y παρέχουν την υποστήριξη για τα πρότυπα της Microsoft όπως η δυναμική ανταλλαγή στοιχείων (DDE) που επιτρέπει π.χ. την δυναμική εποπτοία σε ένα φύλλοEXCEL, Δυναμική σύνδεση βιβλιοθήκης (DLL) και αντικειμένου συνδέσεων και ενσωμάτωση (OLE). Βάση δεδομένων Τα στοιχεία διαμόρφωσης αποθηκεύονται σε μια βάση δεδομένων που συγκεντρώνεται λογικά αλλά φυσικά διανέμεται και που είναι γενικά ενός ιδιόκτητου σχήματος. Για λόγους απόδοσης, το RTDB κατοικεί στη μνήμη των κεντρικών υπολογιστών και είναι επίσης ιδιόκτητου σχήματος. Το σχήμα αρχείων και αναγραφών είναι συνήθως επίσης ιδιόκτητο για λόγους απόδοσης, αλλά μερικά προϊόντα υποστηρίζουν την αναγραφή σε ένα σύστημα διαχείρισης συγγενικών βάσεων δεδομένων (RDBMS) σε ένα πιό αργό ποσοστό είτε άμεσα είτε μέσω μιας διεπαφής ODBC. 2.3.5 Εξελιξιμότητα Η εξελιξιμότητα γίνεται κατανοητή ως δυνατότητα να επεκταθεί το βασισμένο στο SCADA σύστημα ελέγχου με την προσθήκη περισσότερων μεταβλητών διαδικασίας, πιό εξειδικευμένοι κεντρικοί υπολογιστές (πχ για το συναγερμό που χειρίζεται) ή περισσότερους πελάτες. Τα προϊόντα επιτυγχάνουν την εξελιξιμότητα από τη σύνδεση των πολλαπλών κεντρικών υπολογιστών τους με τους αντίστοιχους πολλαπλούς ελεγκτές. Κάθε κεντρικός υπολογιστής στοιχείων έχει τη βάση δεδομένων διαμόρφωσης και RTDB του και είναι αρμόδιος για το χειρισμό ενός υποσυνόλου των μεταβλητών διαδικασίας (απόκτηση, χειρισμός συναγερμών, αρχειοθέτηση). 2.3.6 Πλεονασμός Τα προϊόντα συχνά έχουν ενσωματώσει τον πλεονασμό λογισμικού σε επίπεδο κεντρικών υπολογιστών, το οποίο είναι κανονικά διαφανές(transparent) στο

25
χρήστη. Πολλά από τα προϊόντα παρέχουν επίσης τις πληρέστερες λύσεις πλεονασμού αν είναι απαραίτητο.
2.4 Λειτουργία
2.4.1 Έλεγχος πρόσβασης Οι χρήστες διατίθενται στις ομάδες, οι οποίες έχουν καθορίσει τα ανάγνωσης-γραφής προνόμια πρόσβασης στις παραμέτρους διαδικασίας στο σύστημα και συχνά επίσης στη συγκεκριμένη λειτουργία προϊόντων. 2.4.2 MMI Τα προϊόντα υποστηρίζουν τις πολλαπλές οθόνες, οι οποίες μπορούν να περιέχουν τους συνδυασμούς συνοπτικών διαγραμμάτων και κειμένου. Υποστηρίζουν επίσης την έννοια ενός "γενικού" γραφικού αντικειμένου με τις συνδέσεις για να επεξεργαστούν τις μεταβλητές. Αυτά τα αντικείμενα μπορούν με την διαδικασία drag and drop να επιλεγούν από μια βιβλιοθήκη και να περιληφθούν σε ένα συνοπτικό διάγραμμα. Τα περισσότερα από τα προϊόντα SCADA που αξιολογήθηκαν αποσυνθέτουν τη διαδικασία στις "ατομικές" παραμέτρους (π.χ. ένα ρεύμα παροχής ηλεκτρικού ρεύματος, η μέγιστη αξία του, η κατάσταση on/off, κ.λπ....) στο οποίο ένα όνομα – ετικέτα συνδέεται. Τα Tag-Names που χρησιμοποιούνται για να συνδέσουν τα γραφικά αντικείμενα με τις συσκευές μπορούν να εκδοθούν όπως απαιτείται. Τα προϊόντα περιλαμβάνουν μια βιβλιοθήκη κάποιων τυποποιημένων γραφικών συμβόλων, πολλά από τα οποία εντούτοις δεν θα ήταν εφαρμόσιμα στον τύπο εφαρμογών που αντιμετωπίζονται στην πειραματική κοινότητα φυσικής. Οι στάνταρ δυνατότητες διαμόρφωσης των WINDOWS παρέχονται όπως: zooming, re-sizing, scrolling... Η On-line σύνδεση διαμόρφωση και η προσαρμογή του MMI είναι δυνατές για τους χρήστες με τα κατάλληλα προνόμια. Οι συνδέσεις μπορούν να δημιουργηθούν μεταξύ των σελίδων επίδειξης για να πλοηγήσουν από μια άποψη σε άλλη. 2.4.3 Τάση (trending)

26
Τα προϊόντα που παρέχονται στις διάφορες εγκαταστάσεις μπορούν να συνοψισθούν με βάση τις ακόλουθες δυνατότητες :
• οι παράμετροι που τείνονται σε ένα συγκεκριμένο διάγραμμα μπορούν να προκαθοριστούν ή καθοριστούν on-line
• ένα διάγραμμα μπορεί να περιέχει περισσότερες από 8 δοσμένες παραμέτρους και ένας απεριόριστος αριθμός διαγραμμάτων μπορεί να επιδειχθεί (περιορισμένος μόνο από την αναγνωσιμότητα)
• η σε πραγματικό χρόνο και ιστορική τάση είναι δυνατή, αν και γενικά όχι στο ίδιο διάγραμμα
• η ιστορική τάση είναι δυνατή για οποιαδήποτε αρχειοθετημένη παράμετρο • οι λειτουργίες zooming και scrolling παρέχονται • οι τιμές παραμέτρου στη θέση του κέρσορα μπορούν να επιδειχθούν
Το τείνοντας χαρακτηριστικό είτε παρέχεται υπό τον όρο χωριστή ενότητα(separate module) είτε ως γραφικό αντικείμενο (ActiveX), το όποιο μπορεί έπειτα να ενσωματωθεί σε μια συνοπτική επίδειξη. XY και άλλες στατιστικές περιπτώσεις ανάλυσης γενικά δεν παρέχονται. 2.4.4 Χειρισμός συναγερμών Ο χειρισμός συναγερμών είναι βασισμένος στο όριο και τη θέση ελέγχοντας την κατάσταση στους κεντρικούς υπολογιστές στοιχείων. Οι πιό περίπλοκες εκφράσεις (χρησιμοποιώντας τις αριθμητικές ή λογικές εκφράσεις) μπορούν να αναπτυχθούν με τη δημιουργία των παραγόμενων παραμέτρων στις οποίες ο έλεγχος θέσης ή ορίου εκτελείται έπειτα. Οι συναγερμοί αντιμετωπίζονται λογικά κεντρικά, δηλ., οι πληροφορίες υπάρχουν μόνο σε μια θέση και όλοι οι χρήστες βλέπουν την ίδια θέση (π.χ., η αναγνώριση), και τα πολλαπλά επίπεδα προτεραιότητας συναγερμών (γενικά πολύ περισσότεροι από 3 τέτοια επίπεδα) υποστηρίζονται. Είναι γενικά δυνατό να ομαδοποιηθούν οι συναγερμοί και να αντιμετωπιστούν αυτοί ως οντότητα (χαρακτηριστικά φιλτράροντας στην ομάδα ή την αναγνώριση όλων των συναγερμών σε μια ομάδα). Επιπλέον, είναι δυνατό να κατασταλούν οι συναγερμοί είτε χωριστά είτε ως πλήρη ομάδα. Το φιλτράρισμα των συναγερμών που φαίνονται στη σελίδα συναγερμών ή κατά την εξέταση του log των συναγερμών είναι επίσης δυνατό τουλάχιστον στην προτεραιότητα, το χρόνο και την ομάδα. Εντούτοις, οι σχέσεις μεταξύ των συναγερμών δεν μπορούν γενικά να

27
καθοριστούν κατά τρόπο απλό. Τα E-mails μπορούν να παράγουν ή να προκαθορίσουν ενέργειες που εκτελούνται αυτόματα σε απάντηση στους όρους συναγερμών. 2.4.5 Καταγραφή/αρχειοθέτηση Οι όροι καταγραφής και αρχειοθέτησης χρησιμοποιούνται συχνά για να περιγράψουν την ίδια δυνατότητα. Εντούτοις, η καταγραφή μπορεί να θεωρηθεί ως μεσοπρόθεσμη αποθήκευση των στοιχείων όσον αφορά το δίσκο, ενώ η αρχειοθέτηση είναι μακροχρόνια - αποθήκευση όρου των στοιχείων είτε στο δίσκο είτε σε ένα άλλο μέσο μόνιμης απομνημόνευσης. Η καταγραφή εκτελείται χαρακτηριστικά σε κυκλική βάση, δηλ., μόλις ένα συγκεκριμένο μέγεθος αρχείου , χρόνος περιόδου ή αριθμός των σημείων είναι ο επιθυμητός το δεδομένο επικαλύπτεται. Η καταγραφή των στοιχείων μπορεί να εκτελεσθεί σε μια καθορισμένη συχνότητα, ή να αρχίσει μόνο εάν η αξία αλλάζει ή όταν εμφανίζεται ένα συγκεκριμένο προκαθορισμένο γεγονός. Τα καταγραμμένα στοιχεία μπορούν να μεταφερθούν σε ένα αρχείο μόλις το log είναι πλήρες. Το καταγραμμένο στοιχείο είναι χρόνο-σφραγισμένο(time stamped) και μπορεί να φιλτραριστεί όταν αντιμετωπίζεται από έναν χρήστη. Η αναγραφή των ενεργειών χρηστών γενικά εκτελείται μαζί με μια ταυτότητα χρηστών είτε την ταυτότητα σταθμών. Υπάρχει συχνά επίσης μια δυνατότητα VCR για να παίξει πίσω τα αρχειοθετημένα στοιχεία. 2.4.6 Παραγωγή εκθέσεων Κάποιος μπορεί να συντάξει τις εκθέσεις χρησιμοποιώντας τις ερωτήσεις τύπων SQL στο αρχείο, το RTDB ή το log. Αν και είναι μερικές φορές δυνατό να ενσωματωθούν τα διαγράμματα EXCEL στην έκθεση, μια ικανότητα "cut and paste γενικά δεν παρέχεται. Οι εγκαταστάσεις υπάρχουν για να είναι σε θέση να παραγάγουν αυτόματα, να τυπώσουν και να αρχειοθετήσουν τις εκθέσεις. 2.4.7 Αυτοματοποίηση Η πλειοψηφία των προϊόντων επιτρέπει ενέργειες να προκληθούν αυτόματα από τα γεγονότα. Μια scripting γλώσσα που παρέχεται από τα προϊόντα SCADA επιτρέπει σε αυτές τις ενέργειες να καθοριστεί. Γενικά, κάποιος μπορεί να

28
φορτώσει μια ιδιαίτερη επίδειξη, να στείλει ένα ηλεκτρονικό ταχυδρομείο, να τρέχει μια καθορισμένη εφαρμογή από το χρήστη ή ένα χειρόγραφο και να γράφει στο RTDB. Η έννοια των συνταγών υποστηρίζεται, από μια ιδιαίτερη διαμόρφωση συστημάτων που μπορεί να σωθεί σε ένα αρχείο και να ξαναφορτωθεί έπειτα σε μια μεταγενέστερη ημερομηνία. Η αλληλοuχία(sequencing) υποστηρίζεται επίσης από το όνομα δείχνει, είναι δυνατό να εκτελεσθεί μια πιό σύνθετη ακολουθία ενεργειών σε μια ή περισσότερες συσκευές. Οι ακολουθίες μπορούν επίσης να αντιδράσουν στα εξωτερικά γεγονότα. Μερικά από τα προϊόντα υποστηρίζουν ένα έμπειρο σύστημα αλλά κανένα δεν έχει την έννοια μιας (FSM) Finite State Machine.
2.5 Ανάπτυξη εφαρμογής
2.5.1 Διαμόρφωση Η ανάπτυξη των εφαρμογών γίνεται χαρακτηριστικά σε δύο στάδια. Πρώτα οι παράμετροι διαδικασίας και οι σχετικές πληροφορίες (π.χ. σχετικά με τους όρους συναγερμών) καθορίζονται μέσω κάποιου είδους του προτύπου καθορισμού παραμέτρου και έπειτα η γραφική παράσταση, συμπεριλαμβανομένων των επιδείξεων τάσης και συναγερμών αναπτύσσεται, και συνδέεται όπου απαιτείται για τις παραμέτρους διαδικασίας. Τα προϊόντα παρέχουν επίσης μια δυνατότητα εξαγωγής/εισαγωγής ASCII χαρακτήρων για το στοιχείο διαμόρφωσης (ορισμοί παραμέτρου), το οποίο επιτρέπει σε μεγάλους αριθμούς παραμέτρων να διαμορφωθούν κατά τρόπο αποδοτικότερο χρησιμοποιώντας έναν εξωτερικό συντάκτη(editor) όπως Excel και εισάγοντας έπειτα τα στοιχεία στη βάση δεδομένων διαμόρφωσης. Εντούτοις, πολλά από τα εργαλεία PC έχουν τώρα ένα στούντιο ανάπτυξης τύπων εξερευνητών παραθύρων. Ο υπεύθυνος για την ανάπτυξη λειτουργεί με διάφορους φακέλλους(folders), που κάθε ένας περιέχει μια διαφορετική πτυχή της διαμόρφωσης, συμπεριλαμβανομένης της γραφικής παράστασης.

29
Οι δυνατότητες που παρέχονται από τα προϊόντα για τη διαμόρφωση των πολύ μεγάλων αριθμών παραμέτρων δεν είναι πολύ ισχυρές. Εντούτοις, αυτό δεν είναι πραγματικά πρόβλημα μέχρι τώρα για τις περισσότερες από τις μεγάλες εφαρμογές χρησιμοποιούνται σημεία I/O έως και 50K, και ο έλεγχος των πληθυσμών των βάσεων δεδομένων μέσω ενός editor όπως το Excel είναι ακόμα μια εφαρμόσιμη επιλογή. Οι σε απευθείας σύνδεση τροποποιήσεις στη βάση δεδομένων διαμόρφωσης και τη γραφική παράσταση είναι γενικά δυνατές με το κατάλληλο επίπεδο προνομίων. 2.5.2 Εργαλεία ανάπτυξης Τα ακόλουθα εργαλεία ανάπτυξης παρέχονται ως πρότυπα:
• ένας συντάκτης γραφικής παράστασης(graphic editor), με στανταρ δυνατότητες σχεδιασμού συμπεριλαμβανομένου ελεύθερου, των γραμμών, των κύκλων τετραγώνων, κ.λπ.... Είναι δυνατό να εισαχθούν οι εικόνες με πολλά σχήματα καθώς επίσης και χρησιμοποιώντας τα προκαθορισμένα σύμβολα συμπεριλαμβανομένων π.χ. των διαγραμμάτων τάσεων, κ.λπ. Μια βιβλιοθήκη των γενικών συμβόλων παρέχεται που μπορούν να συνδεθούν δυναμικά με τις μεταβλητές και να ζωντανεψουν καθώς αλλάζουν. Είναι επίσης δυνατό να δημιουργηθούν οι συνδέσεις μεταξύ των απόψεων ώστε να διευκολυνθεί η προσπέλαση στο χρόνο εκτέλεσης.
• ένα εργαλείο διαμόρφωσης βάσεων δεδομένων (συνήθως μέσω των προτύπων παραμέτρου). Είναι γενικά δυνατό να εξαχθούν δεδομένα σε μορφή αρχείων ASCII ώστε να εκδοθεί μέσω ενός συντάκτη(editor) Excel .
• Μια γλώσσα σε μορφή script • μια διεπαφή προγράμματος εφαρμογής (API) που υποστηρίζει C, C++, VB • ένα κουτί εργαλείων ανάπτυξης οδηγών για να αναπτύξει τους οδηγούς για το
υλικό που δεν υποστηρίζεται από το προϊόν SCADA.
2.5.3 Χειρισμός αντικειμένου Τα προϊόντα γενικά έχουν την έννοια των γραφικών κατηγοριών αντικειμένου, οι οποίες υποστηρίζουν την κληρονομιά(inheritance). Επιπλέον, μερικά από τα προϊόντα έχουν την έννοια ενός αντικειμένου μέσα στη βάση δεδομένων διαμόρφωσης. Γενικά τα προϊόντα δεν χειρίζονται τα αντικείμενα, αλλά μάλλον χειρίζονται τις μεμονωμένες παραμέτρους, π.χ., συναγερμοί καθορίζονται για τις παραμέτρους, η καταγραφή εκτελείται στις παραμέτρους, και οι ενέργειες ελέγχου εκτελούνται στις παραμέτρους. Η υποστήριξη των αντικειμένων είναι επομένως αρκετά επιφανειακή.

30
2.6 Εξέλιξη
Οι προμηθευτές SCADA κυκλοφορούν μια σημαντική έκδοση και μια έως δύο πρόσθετες δευτερεύουσες εκδόσεις μία φορά το χρόνο. Αυτά τα προϊόντα εξελίσσονται έτσι πολύ γρήγορα ώστε να εκμεταλλευθούν τις νέες ευκαιρίες αγοράς, για να καλύψουν τις νέες απαιτήσεις των πελατών τους και για να εκμεταλλευθούν τις νέες τεχνολογίες. Όπως αναφέρθηκε ήδη, τα περισσότερα από τα προϊόντα SCADA που αξιολογήθηκαν αποσυνθέτουν τη διαδικασία στις "ατομικές" παραμέτρους στις οποίες ένα όνομα-ετικέτα(Tag-Name) συνδέεται. Αυτό είναι μη πρακτικό στην περίπτωση των πολύ μεγάλων διαδικασιών όταν πρέπει να διαμορφωθούν τα πολύ μεγάλα σύνολα ετικεττών. Δεδομένου ότι οι βιομηχανικές εφαρμογές αυξάνονται στο μέγεθος, οι νέες εκδόσεις SCADA έχουν ως σκοπό τώρα να χειριστούν τις συσκευές και ακόμη και τα ολόκληρα συστήματα ως πλήρεις οντότητες (κατηγορίες) που τοποθετούν όλες τις συγκεκριμένες ιδιότητες και τη λειτουργία σε συμπήκνωση(encapsulation)αυτών. Επιπλέον, θα υποστηρίξουν την ανάπτυξη πολλαπλών ομάδων. Όσον αφορά στις νέες τεχνολογίες, τα προϊόντα SCADA υιοθετούν τώρα:
• Τεχνολογία Web, ActiveX, Java, κτλ. • OPC ως μέσα για εσωτερική επικοινωνία μεταξύ του πελάτη και των ενοτήτων
κεντρικών υπολογιστών. Πρέπει έτσι να είναι δυνατό να συνδεθούν οι υποχωρητικές ενότητες τρίτων OPC σε αυτό το προϊόν SCADA.
2.7 Εφαρμοσμένη μηχανική
Ενώ κάποιος πρέπει σωστά να προσδοκήσει τη σημαντική αποταμίευση ανάπτυξη και συντήρηση με την υιοθέτηση ενός προϊόντος SCADA για την εφαρμογή ενός συστήματος ελέγχου, δεν σημαίνει μια λειτουργία "καμίας προσπάθειας"(no effort). Η ανάγκη για την κατάλληλη εφαρμοσμένη μηχανική δεν μπορεί να υπογραμμιστεί αρκετά για να μειώσει την προσπάθεια ανάπτυξης και για να φθάσει σε ένα σύστημα που συμμορφώνεται με τις απαιτήσεις, το οποίο

31
είναι οικονομικό στην ανάπτυξη και τη συντήρηση και που είναι αξιόπιστη και στιβαρή. Τα παραδείγματα των δραστηριοτήτων εφαρμοσμένης μηχανικής συγκεκριμένων για τη χρήση ενός συστήματος SCADA είναι:
• μια βιβλιοθήκη των αντικειμένων (PLC, συσκευή, υποσύστημα) που συναύδουν με την τυποποιημένη συμπεριφορά αντικειμένου (σκριπτ, ακολουθίες...), τη γραφική διεπαφή και τα σχετικά σκριπτ για τα κινούμενα σχέδια,
• πρότυπα για τους διαφορετικούς τύπους "επιτροπών", π.χ. συναγερμοί, • οδηγίες για το πώς να ελέγξει π.χ. μια συσκευή..., • ένας μηχανισμός για να αποτρέψει τους συγκρουόμενους ελέγχους (εάν δεν
παρέχεται το SCADA),
επίπεδα συναγερμών, συμπεριφορά που υιοθετείται σε περίπτωση συγκεκριμένων συναγερμών...
2.8 Πιθανά οφέλη SCADA
Τα οφέλη που κάποιο μπορεί να αναμείνει από την υιοθέτηση ενός συστήματος SCADA για τον έλεγχο των πειραματικών εγκαταστάσεων φυσικής μπορούν να συνοψιστούν ως εξής:
• μια πλούσια λειτουργία και εκτενείς εγκαταστάσεις ανάπτυξης. Το ποσό προσπάθειας που επενδύεται στο προϊόν SCADA ανέρχεται σε 50 έως 100 π-έτη!
• το ποσό συγκεκριμένης ανάπτυξης που πρέπει να εκτελεσθεί από τον τελικό χρήστη είναι περιορισμένο, ειδικά με την κατάλληλη εφαρμοσμένη μηχανική.
αξιοπιστία και ευρωστία. Αυτά τα συστήματα χρησιμοποιούνται για τις κρίσιμες βιομηχανικές διαδικασίες αποστολής όπου η αξιοπιστία και η απόδοση είναι κυρίαρχες. Επιπλέον, η συγκεκριμένη ανάπτυξη εκτελείται μέσα σε ένα καθιερωμένο πλαίσιο που ενισχύει την αξιοπιστία και την ευρωστία.
• τεχνική υποστήριξη και συντήρηση από τον προμηθευτή.
Για τις μεγάλες συνεργασίες, όπως για το Κέντρο Πυρηνικών Μελετών και Ερευνών (CERN) LHC τα πειράματα, που χρησιμοποιούν ένα σύστημα SCADA για τους ελέγχους τους εξασφαλίζουν ένα κοινό πλαίσιο όχι μόνο για την ανάπτυξη των συγκεκριμένων εφαρμογών αλλά και για να ενεργοποιήσουν τους ανιχνευτές. Οι χειριστές δοκιμάζουν το ίδιο πράγμα "κοιτάζουν και αισθάνονται"(look and feel) οτιδήποτε μέρος του πειράματος ελέγχουν. Εντούτοις, αυτή η πτυχή εξαρτάται επίσης σε σημαντική έκταση από την κατάλληλη εφαρμοσμένη μηχανική.

32
ΜΕΡΟΣ Γ

33
Στην φωτογραφία παραπάνω βλέπουμε την κεντρική σελίδα η οποία περιλαμβάνει τις παρακάτω επιλογές bargraph όπου όταν πατηθεί έχουμε την παρακάτω εικόνα :
όπου βλέπουμε ότι μας δίνει την θερμοκρασία των έξι θερμομέτρων αλλά και την μέση τιμή των έξι αυτών θερμοκρασιών. Αν πατηθεί το πλήκτρο device έχουμε την ακόλουθη εικόνα :

34
όπου περιλαμβάνει την θερμοκρασία των έξι καναλιών , τις ψηφιακές εισόδους οι οποίες είναι ενεργοποιημένες αλλά και τις εξόδους οι οποίες είναι ενεργοποιημένες. Με το πλήκτρο close κλείνει αυτό το παράθυρο. Επίσης μαζί με το παράθυρο device εμφανίζεται και το παράθυρο status όπου περιλαμβάνει το εύρος ζώνης για το alarm

35
δηλαδή για κάθε ένα θερμόμετρο θέτουμε την μέγιστη και την ελάχιστη τιμή όπου ενεργοποιούνται τα alarm. Αν πατήσουμε το πλήκτρο help θα μας εμφανίσει το ακόλουθο παράθυρο όπου περιλαμβάνει τις διευθύνσεις μας στο internet σε περίπτωση που υπάρχει κάποιο πρόβλημα να μπορέσουμε να το λύσουμε .
Αν πατήσουμε το πλήκτρο parameters τότε θα έχουμε το παρακάτω παράθυρο όπου περιλαμβάνει τα ακόλουθα :

36
Για κάθε ένα θερμόμετρο μπορούμε να ρυθμίσουμε τις επιμέρους παραμέτρους και να πατήσουμε το πλήκτρο ΟΚ για να τις επιλέξουμε η το πλήκτρο cancel για να ακυρώσουμε τις ρυθμίσεις μας. Η παράμετρος PV είναι η πραγματική θερμοκρασία ,η παράμετρος SP actual είναι η επιθυμητή τιμή, η παράμετρος SP 1 final και SP 2 final είναι η τιμή 1 του set point και η τιμή 2 του set point αντίστοιχα και εξαρτάται από την τιμή της δεύτερης ψηφιακής εισόδου δηλαδή αν η είσοδος ανενεργή τότε SP = 1 αλλιώς SP =2 .H παράμετρος control status όταν είναι disable σημαίνει πως η πρωτεύουσα έξοδο διαμόρφωσης είναι σε κατάσταση off. Ενώ την παράμετρο manual valve την επιλέγουμε εμείς και αν η έξοδος είναι ορισμένη σαν τύπος on/off μόνο οι τιμές 0% και 100% γίνονται αποδεκτές. Όταν πατήσουμε το πλήκτρο inputs τότε έχουμε το ακόλουθο παράθυρο με τις παραμέτρους του :

37
Η παράμετρος sensor type μας δηλώνει τον τύπο του αισθητηρίου που θα χρησιμοποιήσουμε αν δηλώσουμε σαν τύπο αισθητηρίου none τότε είναι σαν να μην έχουμε δηλώσει τύπο αισθητηρίου και η θερμοκρασία είναι στους μηδέν βαθμούς Κελσίου . Η επιλογή read filter χρησιμοποιείται σε θορυβώδες περιβάλλον όπου οι στιγμιαίες τιμές του φίλτρου αντικαθίστανται από έναν μέσο όρο των οκτώ τελευταίων δειγμάτων . Η επιλογή rounding επιτρέπει μεταβολές της θερμοκρασίας του φίλτρου και κάτω από ένα βαθμό Κελσίου . Η παράμετρος offset επιτρέπει να μεταφραστεί η θερμοκρασία που διαβάζεται στο επιθυμητό επίπεδο . Μόλις πατηθεί το πλήκτρο outputs τότε έχουμε το παρακάτω παράθυρο με τις παραμέτρους του :

38
Η παράμετρος output type είναι ο τύπος της εξόδου και μπορεί να είναι ένας από τους ακόλουθους τύπους : on/off όπου τότε η παράμετρος cycle 1 είναι το μικρότερο διάκενο (διάστημα) χρόνου ανάμεσα στις μεταβολές της εξόδου . Όταν η έξοδος είναι τύπου SSR οι παράμετροι min και max είναι η χαμηλότερη και υψηλότερη τιμή που η έξοδος μπορεί να πάρει .Η παράμετρος slope μας επιτρέπει να επιλέξουμε την ταχύτητα των μεταβολών του set point.Όταν η έξοδος είναι τύπου increm είναι απαραίτητο να θέσουμε το runtime της βαλβίδας που είναι ο χρόνος που απαιτείται από την βαλβίδα για να είναι τελείως ανοιχτή ή κλειστή . Η παράμετρος extra time δείχνει τον επιπλέον χρόνο που θα είναι ανοιχτή ή κλειστή η βαλβίδα ακόμα και αν η τελείως κλειστή ή ανοιχτή θέση της βαλβίδας έχει επιτευχθεί . Αυτό βοηθά τον ελεγκτή να σιγουρευτεί ότι η θέση της βαλβίδας είναι η σωστή , διότι δεν υπάρχει ανατροφοδότηση (feedback) πραγματικής θέσης στην βαλβίδα . Η παράμετρος dead band επιτρέπει την αποφυγή της μικρότερης

39
κίνησης της βαλβίδας από αυτήν που ενδείκνυται .Όταν η δευτερεύουσα (2) έξοδος είναι τύπου alarm είναι ενεργή ή ανενεργή ανάλογα με τις συνθήκες του alarm .Αν η δευτερεύουσα έξοδος είναι τύπου on/off η παράμετρος cycle 2 είναι το μικρότερο διάστημα μεταξύ της αλλαγής της κατάσταση της εξόδου . Η ρύθμιση της δευτερεύουσας εξόδου είναι εξαρτημένη από την ρύθμιση της πρωτεύουσας (1) . Έτσι αν η πρωτεύουσα είναι τύπου increm και η δευτερεύουσα έξοδος θα είναι της ίδιας μορφής διότι η κινητήρια βαλβίδα χρειάζεται δύο εξόδους μια για ανοιχτή και μια για κλειστή . Με τον μόνο τρόπο που μπορεί ο χειριστής να παρέμβει σε αυτήν την περίπτωση ο χειριστής είναι να αλλάξει τον τύπο της πρωτεύουσας εξόδου . Όταν πατηθεί το πλήκτρο control τότε εμφανίζεται το ακόλουθο μενού επιλογών με τις παραμέτρους του :

40
Όταν ο τύπος ελέγχου (control type) είναι κανένας (none) η πρωτεύουσα έξοδος είναι σε κατάσταση off . Για την δεύτερη έξοδο αν είναι on/off τύπου είναι σε κατάσταση off , αν είναι τύπος alarm θα διατηρήσει την κατάσταση που συνεπάγεται από τις συνθήκες του alarm .Όταν ο τύπος ελέγχου έχει τεθεί σε hot ή cold , έξοδος ρύθμισης είναι μόνο η πρωτεύουσα (primary) .Όταν ο τύπος ελέγχου έχει τεθεί σαν hot/cold η πρωτεύουσα έξοδος είναι έξοδος θερμής διαμόρφωσης (hot regulation output) και η δευτερεύουσα έξοδος είναι έξοδος ψυχρής διαμόρφωσης (cold regulation output). H παράμετρος PID cycle(s) είναι το μικρότερο διάστημα χρόνου που χωρά ανάμεσα σε μεταβολές της κατάστασης εξόδου . Στο start επιλέγουμε τον βρόχο π.χ (loop 1) . Με την παράμετρο Prop Band είναι το αναλογικό κέρδος του ελεγκτή , η παράμετρος Integr. Time είναι ο χρόνος ολοκλήρωσης και η παράμετρος Deriv. Time είναι ο χρόνος διαφόρισης . Η παράμετρος Dead Band ακυρώνει τον έλεγχο του PID όταν η διαφορά ανάμεσα στο set point και στην πραγματική θερμοκρασία είναι χαμηλότερη από την τιμή του Dead Band . Οι παράμετροι Int.B + και Int.B – θέτονται συνήθως ίσες με την τιμή της παραμέτρου Prop. B μπορούν να διαμορφωθούν έτσι ώστε να μειώσουν ένα πιθανό πολύ γρήγορο έλεγχο (overshoot) σε περίπτωση αλλαγής του set point.Οι παράμετροι Heat/Cold dead band (%) ορίζει το εύρος μεταξύ του τέλους του ζεστού ελέγχου και την αρχή του ψυχρού ελέγχου αν το dead band έχει αρνητικό πρόσημο υπάρχει ένα εύρος που οι έξοδοι ψυχρού – ζεστού ελέγχου είναι ενεργές ταυτόχρονα . Με την παράμετρο cool proportional band εννοούμε το ψυχρό αναλογικό κέρδος. Με το πάτημα του πλήκτρου set point εμφανίζεται το ακόλουθο παράθυρο με τις παραμέτρους του :

41
Με την παράμετρο set point type επιλέγουμε σαν set point την τιμή που είναι γραμμένη στις πύλες final set point (type =0) ή να χρησιμοποιήσουμε σαν set point την θερμοκρασία ενός από τους έξι βρόχους type(1…..6). Με την επιλογή soft start ενεργή μετά από μια πτώση ισχύς ή μετά από κάποια στιγμιαία απενεργοποίηση το set point παίρνει την τιμή της θερμοκρασίας που έχει ο χρησιμοποιούμενος βρόχος. Με την επιλογή hold back ενεργή σε περίπτωση χαμηλής ή ψηλής θερμοκρασίας alarm οι μεταβολές του set point δεν επιτρέπονται μέχρι η συνθήκη της προειδοποίησης να γίνει ανενεργή .Η παράμετρος inc/dec step είναι το βήμα μείωσης ή αύξησης, η παράμετρος increment cycle είναι ο ελάχιστος χρόνος που απαιτείται για την μεταβολή (αύξηση) της εξόδου. Η παράμετρος decrement cycle είναι ο ελάχιστος χρόνος που απαιτείται για την μεταβολή (μείωση) της εξόδου. Αν πατήσουμε το πλήκτρο alarm τότε εμφανίζεται το παρακάτω μενού με τις παραμέτρους του :

42
H παράμετρος Low relative band μας δείχνει ποια είναι η διαφορά μεταξύ της θερμοκρασίας του βρόχου και του set point και αν αυτή υπερβεί η κατεβεί τα σχετικά κατώφλια (low threshold). Η παράμετρος High relative band κάνει ακριβώς την ίδια δουλεία μόνο που συγκρίνεται με το υψηλό κατώφλι (high threshold).H παράμετρος Activation filter μας επιτρέπει να μικρές χρονικά περιπτώσεις προειδοποίησης. Ενώ με την επιλογή κάποιων από τις ακόλουθες παραμέτρους Low alarm , High alarm , Minimum alarm και Maximum alarm κάνουμε ενεργό και τον αντίστοιχο τύπο προειδοποίησης . Με το πάτημα του πλήκτρου online help εμφανίζεται το ακόλουθο παράθυρο :
Όπου εμφανίζονται διάφορα προβλήματα που μπορεί να υπάρξουν κατά την λειτουργία του μηχανήματος , με το πάτημα του πρώτου πλήκτρου εμφανίζεται το παρακάτω παράθυρο το οποίο περιλαμβάνει διάφορους λόγους που οδήγησαν στο συγκεκριμένο πρόβλημα έτσι ώστε να είναι η λύση του προβλήματος πολύ πιο εύκολη.

43
Αν πατήσουμε στο παράθυρο online help το δεύτερο κατά σειρά πλήκτρο τότε παρουσιάζεται το παρακάτω παράθυρο που περιλαμβάνει λόγους που οδήγησαν στο συγκεκριμένο πρόβλημα αλλά και τρόπους που θα λυθεί αυτό:

44
Aν πατήσουμε το τρίτο κατά σειρά πλήκτρο τότε εμφανίζεται το παρακάτω παράθυρο που περιλαμβάνει λόγους που οδήγησαν στο συγκεκριμένο πρόβλημα αλλά και τρόπους που θα λυθεί αυτό:

45
Ενώ με το τελευταίο πλήκτρο εμφανίζεται το ακόλουθο παράθυρο με τους πιθανούς λόγους :

46
Aν πατήσουμε το πλήκτρο History τότε εμφανίζεται το παρακάτω παράθυρο :
Όπου καταγράφονται λεπτομερώς όλες οι προειδοποιήσεις που έγιναν (τον χρόνο που έγιναν , τον μήνα και την μέρα)αλλά και πότε τελείωσαν αυτές με το πάτημα του πλήκτρου config εμφανίζεται το μικρό παράθυρο όπου μπορούμε να σημειώσουμε πότε άρχισε και πότε τελείωσε μια προειδοποίηση.
47
ΜΕΡΟΣ ∆ 1 - Εγκατάσταση
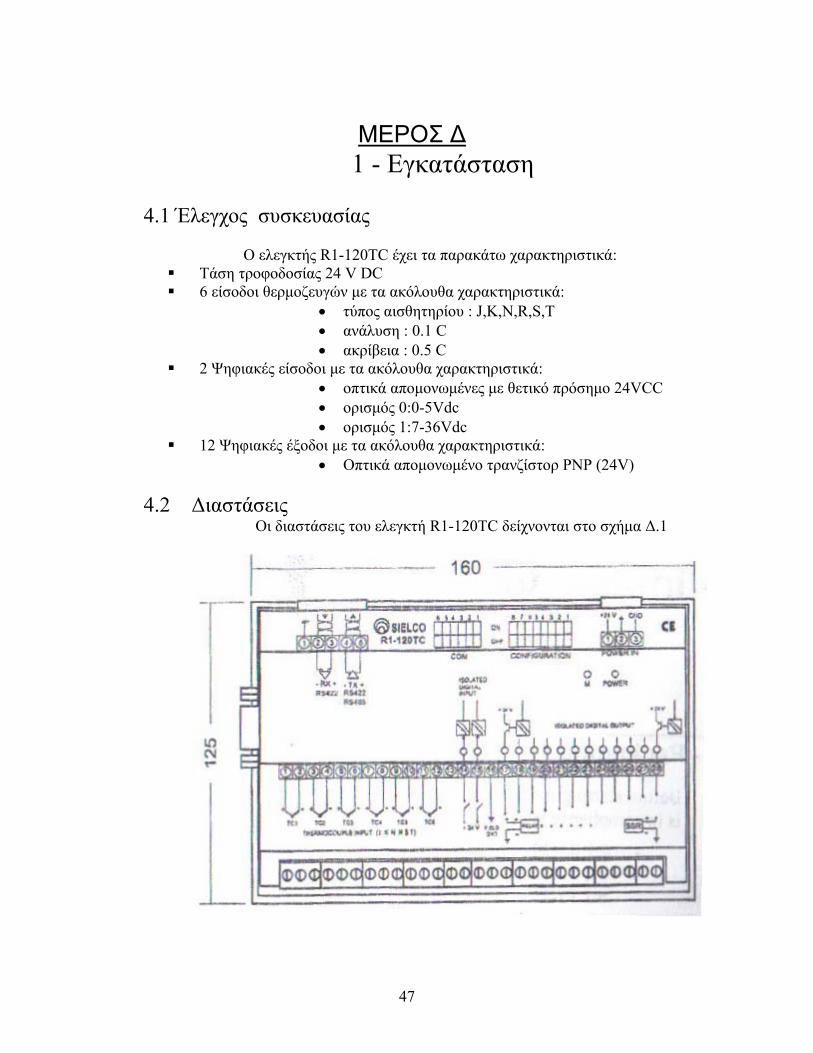
4.1 Έλεγχος συσκευασίας
Ο ελεγκτής R1-120TC έχει τα παρακάτω χαρακτηριστικά:
Τάση τροφοδοσίας 24 V DC 6 είσοδοι θερμοζευγών με τα ακόλουθα χαρακτηριστικά:
• τύπος αισθητηρίου : J,K,N,R,S,T • ανάλυση : 0.1 C • ακρίβεια : 0.5 C
2 Ψηφιακές είσοδοι με τα ακόλουθα χαρακτηριστικά: • οπτικά απομονωμένες με θετικό πρόσημο 24VCC • ορισμός 0:0-5Vdc • ορισμός 1:7-36Vdc
12 Ψηφιακές έξοδοι με τα ακόλουθα χαρακτηριστικά: • Οπτικά απομονωμένο τρανζίστορ PNP (24V)
4.2 Διαστάσεις
Οι διαστάσεις του ελεγκτή R1-120TC δείχνονται στο σχήμα Δ.1

48
4.3 Μέθοδος κατασκευής Όλα τα προϊόντα της σειράς R1-120TC είναι εφοδιασμένα με ένα προστατευτικό κάλυμμα. Στο κάλυμμα υπάρχουν σχηματικές ενδείξεις βάσης. Στις γκρι περιοχές δείχνονται τα κυκλώματα διεπαφής τα οποία βρίσκονται μέσα στην module, στις κίτρινες περιοχές βρίσκονται αισθητήρες κοινής χρήσης και ενεργητές που πρόκειται να συνδεθούν εξωτερικά. Το κάλυμμα παρέχει μόνο ένα διάγραμμα σύνδεσης και δεν μπορεί να δείξει κάθε πιθανή περίπτωση σύνδεσης. Οι διαστάσεις των οπών της κονσόλας F1-10 δείχνονται στο σχήμα Δ.2

49
4.4 Ηλεκτρική καλωδίωση

50
[Μ1] Είσοδοι(βίδα 1 έως 15) και έξοδοι(βίδα 17 έως 28) [C1] Σύνδεσμος παροχής 24Vdc [C2] Σύνδεσμος με το κανάλι σειριακής επικοινωνίας [C3] F1-10 σύνδεσμος πλαισίου [D1] Διακόπτης RS422/RS485 [D2] Διακόπτης πρωτοκόλλου και διεύθυνσης Power Φωτοδίοδος παροχής Led M Αυτοελεγχόμενη φωτοδίοδος Led TX Φωτοδίοδος δεδομένων που έχουν αποσταλεί Led RX Φωτοδίοδος δεδομένων που έχουν ληφθεί Led 14-15 Κατάσταση ψηφιακών εισόδων Led 17-28 Κατάσταση ψηφιακών εξόδων [M1]- Βίδες εισόδων / εξόδων

51
Η βίδα 13 περιέχει το αισθητήριο Pt100 [C1]- Σύνδεσμος παροχής 24Vdc
[C2]- Σύνδεσμος με το κανάλι σειριακής επικοινωνίας

52
Οι ελεγκτές R1-120TC μπορούν να συνδεθούν σε ένα F1-10 χρήστη διεπαφής.
7 Σηματική φωτοδίοδος o Α1- Κανάλι 1 διαμορφωμένη προειδοποίηση o Α2- Κανάλι 2 διαμορφωμένη προειδοποίηση o Α3- Κανάλι 3 διαμορφωμένη προειδοποίηση o Α4- Κανάλι 4 διαμορφωμένη προειδοποίηση o Α5- Κανάλι 5 διαμορφωμένη προειδοποίηση o Α6- Κανάλι 6 διαμορφωμένη προειδοποίηση o STATUS READY- Αναμμένη φωτοδίοδος η συσκευή είναι
έτοιμη 1 2 x 24 χαρακτήρες επίδειξης με φως φωτοδιόδου
6 Μηχανικά κλειδιά ελέγχου
o Page o Enter o Prog o Esc o Inc o Dec
4.4.1 Τάση τροφοδοσίας Ο ελεγκτής χρειάζεται 24 Vdc τάση από τον σύνδεσμο (C1) και μέγιστη ένταση ρεύματος Icc=200mA στα 24Vdc εκτός αν είναι συνδεδεμένο στην έξοδο κάποιο φορτίο (μέγιστο 100mA για έξοδο).
4.4.2 Αναλογικές είσοδοι Ο ελεγκτής R1-120TC παρέχει 6 εισόδους για θερμοζεύγη ή 0-50 mV χαμηλής τάσης σήματα (Μ1 βίδες). Αν χρησιμοποιούμε θερμοζεύγη συνδέουμε μόνο J, K, N, R, S, T τύπους αισθητηρίων σύμφωνα με τα στάνταρ της IEC584. Ο ελεγκτής κάνει αυτόματα την <<αποζημίωση>> ψυχρής σύνδεσης. Συνδέουμε το θετικό και το αρνητικό με τις θετικές και αρνητικές βίδες(αντίστοιχα #1 και #2 για την πρώτη είσοδο) βλέπε σχήμα Δ.2

53
4.4.3 Ψηφιακές είσοδοι εντολής Οι ελεγκτές R1-120TC είναι εφοδιασμένοι με 2 ψηφιακές εισόδους με αρνητικά πρόσημα. Σύμφωνα με τον ορισμό η είσοδος είναι ON για τάση μεταξύ 7 και 36 Vdc και OFF για τάση μεταξύ 0 και 5 Vdc.
4.4.4 Έξοδοι προειδοποίησης και ελέγχου Ο ελεγκτής R1-120TC παρέχει 12 ψηφιακές εξόδους. Οι λογικές έξοδοι είναι ανοιχτοί συλλέκτες με 24 Vdc PNP τρανζίστορ, δίοδο συμπίεσης και ασφάλεια.(Imax εξόδου= 10mA για το κανάλι) βλέπε σχήμα Δ.4
Στην περίπτωση στατικής σύνδεσης ρελέ τα όρια της αντίστασης του ρελέ είναι σχετικά με την παραπάνω τιμή του ρεύματος δηλαδή το ρεύμα εξαρτάται από την αντίσταση. Στην περίπτωση στάνταρ σύνδεσης ρελέ η τιμή του ρεύματος είναι τόση ώστε να διεγείρει το πηνίο. Χρησιμοποιώντας ρελέ για να οδηγήσουμε επαγωγική φόρτιση μπορεί να είναι καλό να συνδέσουμε φίλτρο προστασίας παράλληλα όπως φαίνεται στον πίνακα Δ.1

54
Σύνδεσε θετικό από τον επενεργητή στις Μ1 βίδες από #17 έως #28. Σύνδεσε αρνητικό από τον επενεργητή στις Μ1 βίδες από #16(Field GND).
4.4.5 Σειριακή σύνδεση Ο ελεγκτής R1-120TC μπορεί να συνδεθεί:
o Με ένα PC ή με μια κύρια μονάδα για επίβλεψη και διαμόρφωση χρησιμοποιώντας RS422 ή RS485 σειριακή σύνδεση.
o Με τον προγραμματισμό και επίβλεψη της κονσόλας F-10 από τον (C3) σύνδεσμο. Σύνδεση Επίβλεψης Για να συνδέσουμε στους ελεγκτές είναι απαραίτητο να χρησιμοποιήσουμε μια σειριακή RS422/485 διεπαφή που συνήθως δεν είναι εξοπλισμένοι στους Η/Υ. Γι’ αυτό θα χρησιμοποιήσουμε ένα μετατροπέα σειριακής διεπαφής από RS232 σε RS422/485. Η SIELCO κατασκευάζει ένα μοντέλο το C1-25 που μετατρέπει από RS232 σε RS422/RS485, όπως φαίνεται στον πίνακα Δ.2.
Αυτός ο μετατροπέας μπορεί να συνδεθεί με την σειριακή θύρα υπολογιστή(COM) και μέσω του συνδέσμου (C2) στον ελεγκτή R1-120TC όπως φαίνεται στον πίνακα Δ.3

55
Στην περίπτωση επιλογής εναλλακτικών προϊόντων είναι καλύτερα να χρησιμοποιήσουμε προϊόντα με τη γείωση γαλβανικά απομονωμένη. Η σειριακή σύνδεση του ελεγκτή R1-120TC πρέπει να γίνει είτε στο μοντέλο RS485 χρησιμοποιώντας τον διακόπτη (D1) βλέπε πίνακα Δ.4

56
ΠΡΟΣΟΧΗ Το σετάρισμα κατά το οποίο και οι δύο οι επιλογές #5 και #6 είναι ταυτόχρονα On ή Off ,δεν είναι αποδεκτή. Ο επιλογέας από #1 έως #4 πρέπει να είναι πάντα στην θέση Off. Προγραμματισμός της οθόνης F1-10 και πίνακας(panel) του χειριστή επίβλεψης. Είναι δυνατό να συνδέσουμε τον ελεγκτή R1-120TC με το τοπικό πίνακα F1-10 του χειριστή με τον σύνδεσμο (C3), για να έχουμε τη δυνατότητα πλήρους προγραμματισμού και επίβλεψης.
4.4.6 Καλωδίωση με γείωση και προστασία
Καλωδίωση με γείωση Προτείνεται να κάνουμε την ακόλουθη γείωση
o Ο ακροδέκτης GND (σύνδεσμος C1 pin #3) πάει κατευθείαν στην γείωση.
o Ο ακροδέκτης του αρνητικού σήματος τροφοδοσίας (σύνδεσμος C1 pin #2) πρέπει να συνδεθεί με την τοπική γείωση.
o Στην περίπτωση μακριών και διαταραγμένων σειριακών γραμμών, σύνδεσε τον ακροδέκτη σειριακής γείωσης (GND) σύνδεσμος (C2) pin#1 με την γείωση μέσω μιας αντίστασης της τάξης των 100 Ω.
Είναι σημαντικό ότι οι γειώσεις της συσκευής συνδέονται με τη γείωση ανεξάρτητα η μια από την άλλη. Είναι επίσης σημαντικό να αποφεύγουμε να χρησιμοποιούμε το ίδιο <<μονοπάτι>> σύνδεσης με συσκευές ισχύος όπως ενισχυτές κ.α. Προστασία εισόδων Το διάβασμα της θερμοκρασίας βασίζεται στο χαμηλής έντασης σήμα ανίχνευσης (TC, 0-50mV). Για να αποφύγουμε την εισαγωγή θορύβου κατά το διάβασμα της θερμοκρασίας που θα έχει σαν αποτέλεσμα την αλλοίωση της τιμής ακολουθούμε τους παρακάτω κανόνες προστασίας.
o Χρησιμοποιούμε καλώδια προστασίας για την σύνδεση με τους αισθητήρες.
o Πρέπει να κρατάμε τα καλώδια όσο πιο κοντά γίνεται. o Είναι καλό να μοιράζουμε το ίδιο μονοπάτι σύνδεσης με συσκευές
ισχύος. o Να συνδέσουμε όλες τις μεταλλικές προστασίες των αισθητήρων με την
αρνητική βίδα έτσι ώστε να μην υπάρχει σύνδεση από την πλευρά του αισθητηρίου (οι αλλαγές στο ρεύμα μπορούν να προκαλέσουν αναταράξεις που μπορούν να επηρεάσουν την τιμή του αισθητηρίου ).
o Σύνδεσε όλες τις μεταλλικές προστασίες του αισθητήρα στον σύνδεσμο C1 pin#3.

57
Προστασία σειριακού καναλιού Χρησιμοποίησε προστατευμένο καλώδιο με ένα (RS485) ή δύο RS422 συνεστραμμένο ζευγάρι σύμφωνα με EIA RS422 ή EIA RS485. Χρησιμοποιώντας την γείωση για προστασία: Προτείνουμε καλώδιο Belden 9841(RS485),9842(RS485) Μέγιστη απώλεια γραμμής 6dB Μέγιστη χωρητικότητα γραμμής 100μF Μέγιστο μήκος γραμμής 1200m Αντίσταση γραμμής μεταξύ 100 και 120Ω 4.4.7 Πρωτόκολλο επικοινωνίας Το λογισμικό του πρωτοκόλλου επικοινωνίας λειτουργεί σύμφωνα με το ModBus ASCII ή με το πρότυπο της RTU. Η επιλογή του πρωτοκόλλου γίνεται μέσω του επιλογέα #7 του διακόπτη (D2) (ON=RTU) (OFF=ASCII). Περιεχόμενα πρωτοκόλλου ASCII Ρυθμός Baud 9600/19200 Bits δεδομένων 7 Bit ισοτιμίας άρτιος (άρτια ισοτιμία) Bit τερματισμού 1 Περιεχόμενα πρωτοκόλλου RTU Ρυθμός Baud 9600/19200 Bits δεδομένων 8 Bit ισοτιμίας κανένα Bit τερματισμού 1 Η επιλογή του ρυθμού Baud γίνεται από τον επιλογέα #8 του διακόπτη (D2) (ON=19200), (OFF=9000). 4.4.8 Αναγνώριση συσκευής Έως 63 ελεγκτές R1-120TC μπορούν να συνδεθούν σε μία κύρια μονάδα. Οι αναλογίες αναγνώρισης γίνονται μέσω δυαδικής σημείωσης χρησιμοποιώντας τον διακόπτη (D2).

58
4.5 ΛΕΙΤΟΥΡΓΙΑ
4.5.1 Παρουσίαση- Εισαγωγή Ο ελεγκτής R1-120TC πολλαπλών βρόγχων μπορεί να χειριστεί έως 6 ανεξάρτητους PID βρόγχους ελέγχου με εισόδους θερμοζεύγη. Δύο ψηφιακές είσοδοι είναι επίσης διαθέσιμες για έλεγχο από απόσταση κάποιων συναρτήσεων κοινών για όλους τους βρόγχους.
o Ο αριθμός εισόδου 1 ενεργοποιεί την διαδικασία σεταρίσματος σε όλους τους βρόγχους.
o Ο αριθμός εισόδου 2 διαλέγει το δεύτερο σημείο που έχουμε θέσει (setpoint) σε όλους τους βρόγχους.
4.5.2 Διαμόρφωση εισόδου Η διαμόρφωση εισόδου επιτρέπει ανεξάρτητες ρυθμίσεις για τις παραμέτρους του κάθε βρόγχου για το διάβασμα της θερμοκρασίας όπως τύπος αισθητήρα, επιλογές διαβάσματος και εφαρμογές offset. - τύπος αισθητήρα και επιλογές διαβάσματος
τύπος αισθητήρα - bit 0,1,2: (κανένα, γραμμικό, TcJ, TcK, TcR, TcN, TcS, TcT) επιλογές διαβάσματος - bit 6: φίλτρο στο διάβασμα θερμοκρασίας - bit 7: κυκλική θερμοκρασία
- θερμοκρασία offset (xx,x C) Όταν ο τύπος του αισθητήρα είναι κανένας η τιμή της θερμοκρασίας είναι 0 C. Η τιμή offset επιτρέπει να μεταφραστεί η διαβαζόμενη θερμοκρασία σε ένα επιθυμητό επίπεδο. Η τιμή offset σε βαθμούς κελσίου αναφέρεται μόνο σε αισθητήρες θερμοζευγών. Το φίλτρο το οποίο διαβάζει τη θερμοκρασία είναι απαραίτητο μόνο στην περίπτωση θορυβώδους περιβάλλοντος. Με το φίλτρο οι στιγμιαίες τιμές της θερμοκρασίας αντικαθίστανται με τον μέσο όρο που προκύπτει από τις τελευταίες 8 τιμές της θερμοκρασίας. Η κυκλική επιλογή επιτρέπει στο φίλτρο μεταβολές της θερμοκρασίςα με απόσταση 1 βαθμό κελσίου.

59
4.5.3 Ρύθμιση των εξόδων διαμόρφωσης Στην διαμόρφωση των εξόδων μπορούμε να ορίσουμε για κάθε ένα από τα 6 ζευγάρια των ψηφιακών εξόδων (ένα ζευγάρι ανά βρόχο ), τις ακόλουθες παραμέτρους: - Τύπος εξόδου (πρωτεύον και δευτερεύον), τιμές στο 16δικό σύστημα
- x0= πρωτεύον On/Off - x1= πρωτεύον παλμός με διαμόρφωση εύρους (SSR) - 22= πρωτεύουσα αύξηση - 0x= δευτερεύουσα προειδοποίηση - 1x= δευτερεύον On/Off - 22= δευτερεύουσα αύξηση
- On/Off έξοδος κύκλου (xxxx sec) για πρωτεύον & δευτερεύον - SSR μικρότερη τιμή (xxxx sec) για πρωτεύον μόνο - SSR μεγαλύτερη τιμή (xxxx sec) για πρωτεύον μόνο - Κλίση SSR (xxx,x % sec) για πρωτεύον μόνο - Βαλβίδα χρόνου τρεξίματος (runtime) για πρωτεύον & δευτερεύον - Βαλβίδα έξτρα χρόνου (xxxx sec) για πρωτεύον & δευτερεύον - Βαλβίδα νεκρού εύρους (xxxx sec) για πρωτεύον & δευτερεύον
Όταν η έξοδος είναι διαμορφωμένη σε τύπο On/Off , η έξοδος κλείνει όταν έχουμε ελάχιστη τιμή (0 %) και ανοίγει όταν έχουμε μέγιστη τιμή (100 %) , σε τύπο λειτουργίας PWM, η περίοδος είναι 1 δευτερόλεπτο. Η ελάχιστη και η μέγιστη τιμή χρησιμοποιούνται σε τρόπο λειτουργίας PWM μόνο καο θέτουν τα όρια της διαμόρφωσης της ισχύς της εξόδου. Η παράμετρος της κλίσης επιτρέπει να θέσουμε την μέγιστη ταχύτητα της διαφοράς σε (% sec) της διαμόρφωσης της ισχύς εξόδου. 4.5.4 Διαμόρφωση του επιθυμητό σημείου(set point) Η διαμόρφωση του επιθυμητού σημείου επιτρέπει ανεξάρτητες ρυθμίσεις για κάθε βρόγχο των ακολούθων παραμέτρων. - Τύπος και επιλογές του επιθυμητού σημείου
Τύπος του επιθυμητού σημείου - Bit 0,1,2: (προγραμματισμένη τιμή, βρόγχος 1
θερμοκρασία,…,….,βρόγχος 6) επιλογές - Bit 6: επιλογή soft-start - Bit 7: επιλογή holdback
- Τελική τιμή του επιθυμητού σημείου 1 (xxxx.x C) - Τελική τιμή του επιθυμητού σημείου 2 (xxxx.x C)
- Μείωση- αύξηση του επιθυμητού σημείου με βήμα (step)

60
- Μείωση του επιθυμητού σημείου με κύκλο (xxx sec) - Αύξηση του επιθυμητού σημείου με κύκλο (xxx sec) Η παράμετρος «τύπος του επιθυμητού σημείου επιτρέπει να χρησιμοποιήσουμε σαν τιμή διαμόρφωσης του setpoint την τιμή που είναι γραμμένη στις πύλες «Final setpoint” (τύπος=0) ή να χρησιμοποιήσουμε σαν setoint την θερμοκρασία του ενός από τους έξι βρόγχους (τύπος=1…..6) Με την επιλογή soft start ενεργή, μετά από απώλεια ισχύος ή μετά από διαδικασία απενεργοποίησης, το setpoint τίθεται στην τιμή που έχει ο ενεργός βρόγχος. Με την επιλογή holdback ενεργή, στην περίπτωση χαμηλής ή υψηλής προειδοποίησης, οι διαφορές του setpoint δεν επιτρέπονται έως η προειδοποίηση να γίνει ανενεργή. Οι τιμές του setpoint 1ή 2 διαλέγονται σύμφωνα με τον ορισμό της δεύτερης ψηφιακής εισόδου (είσοδος μη ενεργή= setpoint1, είσοδος ενεργή= setpoint2). Συνδυάζοντας τις τιμές του βήματος (step) του setpoint και της αύξησης ή της μείωσης του setoint μπορούμε να αυξήσουμε ή να μειώσουμε την κλίση. 4.5.5 Διαμόρφωση ελέγχου Οι παράμετροι του PID ελεγκτή μπορούν να τεθούν ανεξάρτητα για κάθε βρόγχο, αυτοί είναι: - Τύπος ρύθμισης, τρόπος ρύθμισης και σειρά έναρξης:
- bit 0,1,2 (0= απορρίπτονται 1….6) Τρόπος ρύθμισης (regulation mode)
- bit 3,4 (0= ανενεργός, 1= χειροκίνητος, 2= αυτόματος, 3= αυτοπροσαρμοζόμενος)
Τύπος ρύθμισης - bit 6,7 (0= κανένας, 1=ζεστός, 2=ψυχρός, 3=ψυχρός/ζεστός)
- Κύκλος ελέγχου του PID (xxx sec) - Αναλογικό εύρος (xxx.x C) - Νεκρό εύρος (Dead band) (xx.x C) - Ολοκληρωτικός χρόνος δράσης (Integral action time) (xxxx sec) - Διαφορικός χρόνος δράσης (Derivative action time) (xxxx sec) - Χαμηλότερο εύρος της ολοκληρωτικής δράσης (xxx.x C) - Υψηλότερο εύρος της ολοκληρωτικής δράσης (xxx.x C) - Ψυχρό αναλογικό εύρος (xxx.x C) - Ψυχρό/ ζεστό νεκρό εύρος (+/- xxx.x C) Ο τύπος της λειτουργίας εξαρτάται από τον ορισμό της πρώτης ψηφιακής εισόδου: Όταν η ψηφιακή είσοδος 1 είναι ανενεργή αχρηστεύει τη διαδικασία ρύθμισης όλων των βρόγχων, τότε κλείνουμε όλες τις ψηφιακές εξόδους και αρχικοποιούμε στο 0 την τιμή της start- up step. Η παράμετρος του νεκρού εύρους αχρηστεύει

61
τον έλεγχο του PID όταν η διαφορά ανάμεσα στο setpoint και στην πραγματική θερμοκρασία είναι χαμηλότερη από την τιμή του νεκρού εύρους. Οι υψηλότερες και οι χαμηλότερες τιμές του ολοκληρωτικού εύρους δράσης θέτονται συνήθως ίσες στην τιμή αναλογικού εύρους. Αυτές μπορούν να τροποποιηθούν για να μειώσουν μια πιθανή υπερύψωση στην περίπτωση που αλλάξει το setpoint. Το ψυχρό και το ζεστό νεκρό εύρος καθορίζει το εύρος ανάμεσα στο τέλος του ζεστού ελέγχου και την αρχή του ψυχρού ελέγχου. Αν το νεκρό εύρος έχει αρνητική τιμή, υπάρχει εύρος όπου οι έξοδοι του ζεστού και του ψυχρού ελέγχου είναι ενεργοί την ίδια χρονική στιγμή. Όταν ο τρόπος ρύθμισης είναι ανενεργό, η διαδικασία ρύθμισης είναι απενεργοποιημένη. Στον χειροκίνητο τρόπο η τιμή της ισχύς εξόδου ελέγχεται από τον χειριστή, στον αυτοπροσαρμοζόμενο τρόπο, η θερμοκρασία ταλαντώνεται γύρω από την τιμή του setpoint και στο τέλος της διαδικασίας, οι παράμετροι του PID υπολογίζονται αυτόματα και αναβαθμίζονται και ο τρόπος ρύθμισης είναι αυτόματος. Ο ελεγκτής μπορεί να κάνει μόνο μία αυτοπροσαρμοζόμενη διαδικασία την ίδια στιγμή. Αν ο χειριστής θέσει σε αυτοπροσαρμοζόμενο τύπο περισσότερους από ένα βρόγχο την ίδια χρονική στιγμή η τελευταία τιμή που επρόκειτο να τεθεί δεν τίθεται και ο βρόγχος γίνεται ανενεργός. Ο τρόπος λειτουργίας του πρώτου βρόγχου που τέθηκε σε αυτοπροσαρμοζόμενη διαδικασία ο χειριστής μπορεί να προχωρήσει στο επόμενο αυτοπροσαρμοζόμενο βρόγχο. Ο αλγόριθμος του PID μπορεί να θέσει τη σωστή ισχύ εξόδου σε μια πρωτεύουσα και σε μια δευτερεύουσα έξοδο ρύθμισης. 4.5.6 Διαμόρφωση προειδοποίησης Η διαμόρφωση προειδοποίησης επιτρέπει να τεθούν οι όροι προειδοποίησης ανεξάρτητα για κάθε βρόγχο. Οι όροι της προειδοποίησης εξαρτώνται από τα ακόλουθα κατώφλια προειδοποίησης. - Σχετική χαμηλή θερμοκρασία (xxxx.x C) - Σχετική υψηλή θερμοκρασία (xxxx.x C) - Μικρότερη θερμοκρασία (xxxx.x C) - Μεγαλύτερη θερμοκρασία (xxxx.x C) Η σχετική συνθήκη της προειδοποίησης συνεχίζεται αν η διαφορά μεταξύ της θερμοκρασίας βρόγχου και της θερμοκρασίας setpoint υπερβαίνει το σχετικό χαμηλό ή υψηλό κατώφλι. Η απόλυτη κατάστασή της συνεχίζεται αν η θερμοκρασία βρόγχου υπερβεί το μέγιστο ή το ελάχιστο κατώφλι. Οι συνθήκες προειδοποίησης προκύπτουν από σύγκριση με το κατώφλι προειδοποίησης. Οι συνθήκες προειδοποίησης μπορούν να χρησιμοποιηθούν για αν δημιουργήσουν μια συγκεκριμένη προειδοποίηση στην δεύτερη εξοδου του βρόγχου μέσα από τις παρακάτω παραμέτρους: - Μάσκα προειδοποίησης (Alarm mask)
o bit0 : διάλειμμα αισθητήρα o bit1 : χαμηλή προειδοποίηση o bit2 : υψηλή προειδοποίηση

62
o bit3 : ελάχιστη προειδοποίηση o bit4 : μέγιστη προειδοποίηση o bit5 : ---------- o bit6 : ---------- o bit7 : ----------
- Χρόνο για την ενεργοποίηση, ON φίλτρου (xxx sec) Ο χρόνος του φίλτρου μπορεί να χρησιμοποιηθεί για την αποφυγή προειδοποιήσεων όταν εκπληρώνονται οι συνθήκες για λίγο χρονικό διάστημα.
4.6 Ξεκίνημα στον προγραμματισμό σειράς Ο προγραμματισμός στο ξεκίνημα της σειράς ζέστης επιτρέπει την μείωση της κορφής της ενέργειας που απαιτείται κατά την διάρκεια της φάσης έναρξης. Είναι καλό να ξεκινήσουμε με ζεστές ζώνες που παίρνουν περισσότερο χρόνο για να φτάσουν στη μέγιστη θερμοκρασία. Με αυτόν τον τρόπο είναι πιθανό να μειώσουμε την συνολική κατανάλωση ενέργειας και να μειώσουμε τις τοπικές κορφές. Με την παράμετρο « Start up Sequence number » που ονομάζεται ¨ Oa¨, είναι πιθανό να αντιστοιχίσουμε σε κάθε βρόγχο ένα αριθμό που προσδιορίζει την σειρά εκκίνησης. Για να προγραμματίσουμε τη σειρά έναρξης είναι απαραίτητο να θέσουμε για κάθε ένα βρόγχο των παραμέτρων Oa και την ελάχιστη τιμή προειδοποίησης του κατωφλίου. Αν η Oa έχει τιμή μηδέν η διαδικασία εκκίνησης για τον βρόγχο προσπερνάτε και η διαδικασία ρύθμισης ξεκινά αμέσως. Η σειρά εκκίνησης ελέγχεται από το περιεχόμενο της παραμέτρου ‘Pa’ = ‘start up step’ που παίρνει τιμές από 1 έως 6. Όπου 1= start of sequence = αρχή της σειράς και όπου 6= end of sequence = τέλος σειράς. Όταν η λογική είσοδος 1 κλείσει η Pa αρχικοποιείται στην τιμή 0. Όταν Pa=1 όλοι οι βρόγχοι με Oa=1 ξεκινούν να ζεσταίνονται όταν αυτοί οι βρόγχοι φτάσουν σε θερμοκρασία μεγαλύτερη από την προσδοκούμενη θερμοκρασία του κατωφλίου προειδοποίησης το περιεχόμενο της Pa αυξάνεται αυτόματα κατά 1. Σ΄ αυτό το σημείο όλοι οι βρόγχοι με Oa=2 ξεκινούν να ζεσταίνονται και η διαδικασία συνεχίζεται έως ότου το Pa αποκτήσει τελική τιμή Pa=6.

63
4.7 Επίβλεψη Για κάθε βρόγχο οι ακόλουθες πύλες ανάγνωσης είναι διαθέσιμες, επιπλέον για τις πύλες ανάγνωσης/ γραφής χρειάζεται διαμόρφωση: - Πραγματική θερμοκρασία στο 1/10 του βαθμού (xxxx.x C) - Αποτελεσματικό δόσιμο του setpoint στο 1/10 του βαθμού (xxxx.x C) - Τιμή της πρωτεύουσας εξόδου διαμόρφωσης (xxx.x % ) - Τιμή της δευτερεύουσας εξόδου διαμόρφωσης (xxx.x %) - Πραγματικός τρόπος λειτουργίας
o 0= απενεργοποιημένο o 1= χειροκίνητο o 2= αυτόματο o 3= αυτοπροσαρμοζόμενο
- Κατάσταση προειδοποίησης o bit0= διάλειμμα αισθητήρα o bit1= χαμηλή θερμοκρασία o bit2= υψηλή θερμοκρασία o bit3= μικρότερη θερμοκρασία o bit4= μεγαλύτερη θερμοκρασία o bit5= -------- o bit6= -------- o bit7= --------
Είναι επίσης διαθέσιμο το πραγματικό start up step = Pa κοινό για όλους τους βρόγχους.
4.8 Αυτοελεγχόμενη φωτοδίοδος Η αυτοελεγχόμενη φωτοδίοδος δίνει μία σύνθετη ένδειξη για την λειτουργία του ελεγκτή. Υπάρχουν τρεις πιθανότητες: - Η φωτοδίοδος να είναι πάντα ON ή OFF : αυτό δείχνει ότι η CPU δεν
λειτουργεί και αυτό οφείλεται είτε σε λάθος ή σε απώλεια ισχύος.
- Η φωτοδίοδος κλείνει και ανοίγει με σταθερό ρυθμό : αυτό δείχνει ότι η διαδικασία αρχικοποίησης τρέχει. Αυτή η διαδικασία ξεκινά μετά από επανατοποθέτηση (reset) και διαρκεί περίπου 10 sec. Όταν η διαδικασία αρχικοποίησης τρέχει η σειριακή επικοινωνία και η διαδικασία ρύθμισης είναι ανενεργές.
- Η φωτοδίοδος εκτελεί τρεις γρήγορους παλμούς ακολουθούμενους με μια
μακριά παύση : αυτό δείχνει κανονικό τρέξιμο (Normal running).

64
4.9 ΔΙΕΠΑΦΗ ΧΡΗΣΤΗ (USER INTERFACE) 4.9.1 Εισαγωγή Ο προγραμματισμός, η διαμόρφωση και η επίβλεψη του ελεγκτή μπορούν να γίνουν με μια από τις παρακάτω διαδικασίες: - Με ένα τοπικό πίνακα διαχείρισης F1-10, συνδεδεμένο κατ’ ευθείαν στον
ελεγκτή με ένα ειδικό καλώδιο. Οι διαδικασίες διαλόγου εξηγούνται στην παράγραφο 2 του παρόντος κεφαλαίου.
- Με ένα Η/Υ. Συνδεδεμένο σε πολλούς ελεγκτές με ένα πρωτόκολλο RS485
bus ή Modbus. Η λίστα από τις διαθέσιμες πύλες δείχνεται στο παράρτημα 1 αυτού του κεφαλαίου.
4.9.2 Πίνακας Διαχείρισης (operation panel) F1-10 Ο πίνακας διαχείρισης F1-10 έχει 2 γραμμές από 24 χαρακτήρες η κάθε μία, ένα πληκτρολόγιο με 6 σημεία «κλειδιά» και 6 φωτοδιόδους.
Όταν συνδεθεί με έναν ελεγκτή, ο πίνακας διαχείρισης θα δείξει διάφορα μενού που επιτρέπουν διαμόρφωση, επίβλεψη και προγραμματισμό του ελεγκτή. Στην εξ’ ορισμού (default) σελίδα οι θερμοκρασίες των 6 θερμοζευγών δίνεται οπτικοποιημένη. Στις επόμενες σελίδες το νόημα των διαφόρων μενού εξηγείται. Επίσης εξηγείται πώς να εισαχθεί ή να αλλάξει μια τιμή και όσο αφορά τις παραμέτρους, η ελάχιστη και μέγιστη επιτρεπόμενη τιμή δείχνονται στο δεξιό μέρος του πίνακα [min…..max].

65
4.9.3 Πληκτρολόγιο Τα «κλειδιά» και η λειτουργία τους δίνονται παρακάτω:
4.9.4 Φωτοδίοδος πρόσοψης (Frond led)
Περιστρέφει τα διάφορα αντικείμενα του μενού
Σε περίπτωση που πατηθεί το κουμπί μπαίνουμε στο επόμενο επίπεδο
Επιβεβαιώνει τις αλλαγές των δεδομένων
Ακυρώνει την αλλαγή του δεδομένου ή επιστρέφει στο προηγούμενο επίπεδο του μενού
Μείωση του επιλεγμένου δεδομένου
Αύξηση του επιλεγμένου δεδομένου
Operation

66
Η φωτοδίοδος στον πίνακα F1-10 χρησιμοποιείται σε συνεργασία με μια ψηφιακή έξοδο ειδοποίησης. 4.9.5 Σελίδα εξορισμού (default page) ή κύρια σελίδα Η σελίδα εξορισμού ή κύρια σελίδα (main page), είναι η πρώτη σελίδα που βλέπουμε όταν ανοίγουμε τον ελεγκτή. Εμείς βλέπουμε τις θερμοκρασίας των έξι θερμοζευγών σε βαθμούς κελσίου.
Με το κουμπί enter πάμε στο κυρίως μενού. 4.9.6 Κυρίως μενού (main menu) Από το κυρίως μενού μπορούμε να πάμε στο μενού επίβλεψης, στο μενού προγραμματισμού, στο μενού διαμόρφωσης και στο μενού διάγνωσης. Με το κουμπί επιλογή μπορούμε να περιστρέψουμε τα διάφορα αντικείμενα του μενού και με το κουμπί enter μπορούμε να πάμε στο επόμενο επίπεδο.
Η τελευταία σειρά επιτρέπει να διαλέξουμε τη γλώσσα. Με το κουμπί DEC και INC μπορούμε να αλλάξουμε την τιμή ενός δεδομένου. Με το κουμπί Prg μπορεί να οριστεί νέο δεδομένα. 4.9.7 Επίβλεψη Η σελίδα επίβλεψη κάνει επισκόπηση της πραγματικής κατάστασης του κάθε βρόγχου.
Η εμφάνιση των δεδομένων είναι:

67
Χρησιμοποίησε το κουμπί επιλογής για να διαλέξεις τον επόμενο βρόγχο, χρησιμοποίησε το κουμπί esc για να επιστρέψεις στο προηγούμενο μενού. 4.9.8 Προγραμματισμός Στις σελίδες προγραμματισμού μπορούμε να θέσουμε τον τρόπο χειρισμού (operating mode) και τις τιμές των set-point για κάθε βρόγχο. Διάλεξε τον επιθυμητό βρόγχο και μετά πήγαινε στο σετάρισμα των παραμέτρων.
Όταν η κατάσταση έχει τεθεί στο «disable», η πρωτεύουσα έξοδος διαμόρφωσης είναι εξορισμού off. Για την δευτερεύουσα έξοδο: αν έχει διαμόρφωση ως τύπου On/Off είναι εξ’ ορισμού off, αν είναι τύπος ειδοποίησης (alarm type) θα παραμένει στην κατάσταση που υπάρχει και στις συνθήκες ειδοποίησης. Όταν η κατάσταση έχει τεθεί στο χειροκίνητο, ο διαχειριστής μπορεί να αλλάξει την τιμή της ισχύς της πρωτεύουσας εξόδου. Αν η έξοδος είναι διαμορφωμένη σαν τύπου On/Off, μόνο οι τιμές 0% και 100% είναι αποδεκτές. Οι ενδιάμεσες τιμές είναι αποδεκτές όταν η έξοδος είναι διαμορφωμένη ως τύπου SSR. 4.9.9 Διαμόρφωση (Configuration) Η διαμόρφωση του ελεγκτή έχει δύο σκέλη: την διαμόρφωση βρόγχου και την διαμόρφωση εξόδου.

68
Διαμόρφωση βρόγχου
Για κάθε βρόγχο είναι απαραίτητο να θέσουμε τις παραμέτρους που απαιτούνται για διαμόρφωση των εισόδων των set-points, των ρυθμίσεων και των ειδοποιήσεων.
Στις σελίδες της διαμόρφωσης εισόδων μπορούμε να θέσουμε τις παραμέτρους που απαιτούνται για το διάβασμα της θερμοκρασίας με ένα αισθητήρα θερμοζεύγους. Όταν ο τύπος του αισθητήρα είναι «none» (κανένας) η τιμή της θερμοκρασίας είναι 0 C. Το φίλτρο ανάγνωσης είναι απαραίτητο μόνο στην περίπτωση περιβάλλοντος με θόρυβο. Με το φίλτρο οι στιγμιαίες τιμές αντικαθίστανται με τον μέσο όρο που υπολογίζεται από τα τελευταία οκτώ δείγματα. Η επιλογή «Rounding» επιτρέπει μεταβολές της θερμοκρασίας κάτω από 1 C. Η επιλογή των παραμέτρων offset επιτρέπει την μετάφραση των διαβαζόμενων θερμοκρασιών σε ένα επιθυμητό επίπεδο.

69
Για τον τύπο set-point οι τιμές που επιτρέπονται είναι: Progr. Η προγραμματισμένη τιμή setpoint 1ή 2 σύμφωνα με την κατάσταση της δεύτερης ψηφιακής εισόδου Temp N Το setpoint είναι η θερμοκρασία του βρόγχου Ν
Τύπος Ελέγχου Όταν ο τύπος ελέγχου έχει τεθεί σε «none», η πρωτεύουσα έξοδος διαμόρφωσης είναι off. Για την δεύτερη έξοδο: αν είναι διαμορφωμένη σε τύπο «On/Off» είναι σε κατάσταση off, αν έχει διαμορφωθεί σαν τύπου ειδοποίησης, θα διατηρεί την κατάσταση που δείχνει η κατάσταση της ειδοποίησης. Όταν ο τύπος ελέγχου έχει τεθεί σε «hot» ή «cold», η έξοδος διαμόρφωσης είναι πρωτεύουσα έξοδος μόνο. Όταν ο τύπος ελέγχου είναι έχει τεθεί σε «hot/cold», η ζεστή έξοδος διαμόρφωσης είναι πρωτεύουσα έξοδος και η ψυχρή έξοδος διαμόρφωσης είναι δευτερεύουσα έξοδος.

70
Σειρά εκκίνησης Ο ελεγκτής μπορεί να κάνει μια σειρά εκκίνησης (start sequence) των έξι βρόγχων. Για να συμπεριλάβουμε ένα βρόγχο στη σειρά θέτουμε τιμή από 1 έως 6 για να εξάγουμε ένα βρόγχο θέτουμε την τιμή στο 0.
Για να ορίσουμε τη μάσκα προειδοποίησης (alarm mask) θέτουμε σε «yes» ή «no» τις τιμές διαφόρων αντικειμένων. Η δευτερεύουσα έξοδος (αν διαμορφωθεί σωστά σαν τύπος προειδοποίησης) θα τεθεί σε λειτουργία αν έστω ένα αντικείμενο έχει τεθεί σε «yes». Στην σελίδα επίβλεψης η κατάσταση της προειδοποίησης οπτικοποιείται σε οποιαδήποτε περίπτωση. Η επιλογή της παραμέτρου «On filter» επιτρέπει να αποφύγουμε τις καταστάσεις μικρής προειδοποίησης. Το φίλτρο λειτουργεί μόνο όταν η κατάσταση της προειδοποίησης είναι On. Οι συνθήκες προειδοποίησης πρέπει να παραμένουν συνεχώς ενεργές για την ώρα ένδειξης για να ενεργοποιηθεί η έξοδος προειδοποίησης. Για να λειτουργήσει ενδιάμεσα η έξοδος προειδοποίησης θέτουμε την παράμετρο στα 0 sec. Η έξοδος προειδοποίησης μπαίνει σε λειτουργία αμέσως αφού όλες οι συνθήκες προειδοποίησης είναι ανενεργές. Καμία κράτηση προειδοποίησης δεν γίνεται απ’ την συσκευή. Διαμόρφωση Εξόδου Κάθε βρόγχος χρησιμοποιεί δύο ψηφιακές εξόδους για να ρυθμίσει ή να δείξει προειδοποίηση. Κάθε βρόγχος έχει μια πρωτεύουσα εξόδου που χρησιμοποιεί για ρύθμιση και μια δευτερεύουσα έξοδο που χρησιμοποιείται για ρύθμιση (hot/cold mode) ή για τους σκοπούς των προειδοποιήσεων. Ο παρακάτω πίνακας δείχνει τις συνδέσεις μεταξύ βρόγχων και εξόδων.

71
Η διαμόρφωση της ψηφιακής εξόδου απαιτεί για κάθε βρόγχο μια ξεχωριστή διαμόρφωση για την πρωτεύουσα και δευτερεύουσα έξοδο.
Πρωτεύουσα έξοδος διαμόρφωσης Η έξοδος πρωτεύουσας διαμόρφωσης μπορεί να διαμορφωθεί σαν τύπος «on//off» ή σαν τύπος SSR ή σαν τύπος αύξησης (incremental type). Όταν ο τύπος της εξόδου είναι «on//off», η παράμετρος «cycle» είναι ο μικρότερος χρόνος μεταξύ των μεταβολών της εξόδου. Όταν ο τύπος της διαμόρφωσης είναι «SSR», οι παράμετροι minimum και maximum είναι η μικρότερη και η μεγαλύτερη τιμή που μπορεί να φτάσει η έξοδος. Η παράμετρος «slope» μας επιτρέπει να επιλέξουμε την ταχύτητα της μεταβολής του setpoint. Όταν η έξοδος έχει διαμορφωθεί σαν τύπος αύξησης «incremental type» είναι απαραίτητο να θέσουμε το χρόνο τρεξίματος (run type) της βαλβίδας. Ο έξτρα χρόνος «extra time» μας δείχνει τον συμπληρωματικό χρόνο που χρειάζεται για το άνοιγμα και κλείσιμο ακόμα και αν έχει ανοίξει ή κλείσει τελείως η βαλβίδα. Αυτό επιτρέπει στον ελεγκτή να βεβαιωθεί ότι η θέση της βαλβίδας είναι σωστή γιατί δεν υπάρχει ανατροφοδότηση για την πραγματική θέση της βαλβίδας. Η παράμετρος «dead band» επιτρέπει να αποφύγουν με την μικρότερη κίνηση της βαλβίδας απ’ αυτήν που προβλέπεται. Διαμόρφωση της δευτερεύουσας εξόδου

72
Όταν η έξοδος είναι διαμορφωμένη σαν «alarm» (προειδοποίηση) λειτουργεί ή όχι ανάλογα με τις συνθήκες που ορίζονται στην διαμόρφωση των βρόγχων. Αν η έξοδος είναι τύπου «On/Off» η παράμετρος «cycle» είναι ο μικρότερος χρόνος ανάμεσα στην μεταβολή της κατάστασης της εξόδου. Η διαμόρφωση της δευτερεύουσας εξόδου είναι αυστηρά εξαρτώμενη απ’ την διαμόρφωση της πρωτεύουσας εξόδου. Αν η πρωτεύουσα έξοδος είναι διαμορφωμένη σαν τύπος αύξησης αυτόματα η δευτερεύουσα έξοδος θα είναι του ίδιου τύπου γιατί ο ελεγκτής μιας βαλβίδας απαιτεί δύο εξόδους (μια για ανοιχτή και μια κλειστεί). Σ’ αυτή την περίπτωση στο μενού διαμόρφωσης της δευτερεύουσας εξόδου η τιμή της «increm» θα εμφανιστεί αλλά ο χειριστής δεν θα μπορεί να το αλλάξει. Ο μόνος τρόπος για να αλλάξουμε αυτήν την τιμή είναι να θέσουμε τον τύπο της πρωτεύουσας εξόδου σε τιμή διαφορετική από «increm». 4.9.10 Διάγνωση Οι σελίδες διάγνωσης είναι χρήσιμες κατά την διάρκεια της εγκατάστασης του ελεγκτή και για να καθοριστεί η σωστή λειτουργία. Στο μενού διάγνωσης εμφανίζονται οι σελίδες που σχετίζονται με τις ψηφιακές εισόδους /εξόδους, σειριακή επικοινωνία και αναλογικές εισόδους.
Στην διάγνωση για τις ψηφιακές εισόδους μπορούμε να δούμε και να αλλάξουμε τις πραγματικές τους καταστάσεις.
Στην σελίδα διάγνωσης της επικοινωνίας μπορούμε να δούμε τις τιμές που θέτονται από ένα μικροδιακόπτη στον πίνακα: διεύθυνση συσκευής (device address, baud rate και τύπος του πρωτοκόλλου Modbus).
Στην διάγνωση αναλογικής εισόδου κάποιες τιμές εμφανίζονται. Τρεις δυαδικοί αριθμοί: η κλίση του μετατροπέα A/D (off), το δείγμα τάσης (Vsa) και το δείγμα της αντίστασης (Rsa), επίσης εμφανίζεται η θερμοκρασία σε βαθμούς κελσίου των θερμοζευγών (Jct).

73
4.9.11 Επίβλεψη μέσω Η/Υ Το σύστημα WINLOG W/A που είναι τύπος λογισμικού SCADA προτείνεται μαζί με τον ελεγκτή, κάνει διαθέσιμο στον χρήστη μια διεπαφή διαχείρισης που βασίζεται στα Windows. Ο χρήστης μπορεί να διαμορφώσει τις συσκευές να επίβλεψη πραγματικού χρόνου, μπορεί να κάνει διαχείριση των προειδοποιήσεων κ.α. Όλα τα δεδομένα είναι αποθηκευμένα σε βάσεις δεδομένων τα οποία μπορούν να προσπελαστούν από πολλές συνηθισμένες εφαρμογές όπως excel, access. Ένα ολοκληρωμένο περιβάλλον βελτιώσεων κάνουν ένα μεγάλο σετ από όργανα- εργαλεία για να φτιάξουμε γρήγορα πολύγλωσσες εφαρμογές. Για να χρησιμοποιήσουμε ένα λογισμικό Winlog W/A, πρέπει να διαβάσουμε ένα συγκεκριμένο βιβλίο οδηγιών. Το πρωτόκολλο επικοινωνίας που χρησιμοποιείται είναι Modbus RTU ή Modbus ASCII. Η λίστα των διαθέσιμων πυλών δείχνεται στο παράρτημα Α.

74
10 ΛΙΣΤΑ ΠΥΛΩΝ
Δ.1 – Λίστα αριθμητικών πυλών (holding registers)

75

76

77

78

79

80

81
Δ.2 – Λίστα ψηφιακών πυλών (coils)