virtual arthroscopic knee surgery traning system yang xiaosong the chinese university of hong kong...
TRANSCRIPT
VIRTUAL ARTHROSCOPIC KNEE SURGERY TRANING SYSTEM
Yang XiaosongThe Chinese University of Hong Kong
Tsinghua University

VIRTUAL ARTHROSCOPIC KNEE SURGERY TRANING SYSTEM
A joint project between
the Chinese University of Hong Kongthe Chinese University of Hong Kong
Tsinghua University,Tsinghua University,
sponsored by
The National Natural Science Foundation of China RGC of Hong Kong
Minimally Invasive Microsurgical Technique
Less trauma Reduced pain Quicker convalescence
Restrictions of Arthroscopy
Restricted vision Poor hand-eye coordination Limited mobility of surgical instruments
Surgical Skill Training
Animals Cadavers Virtual reality based simulation systems
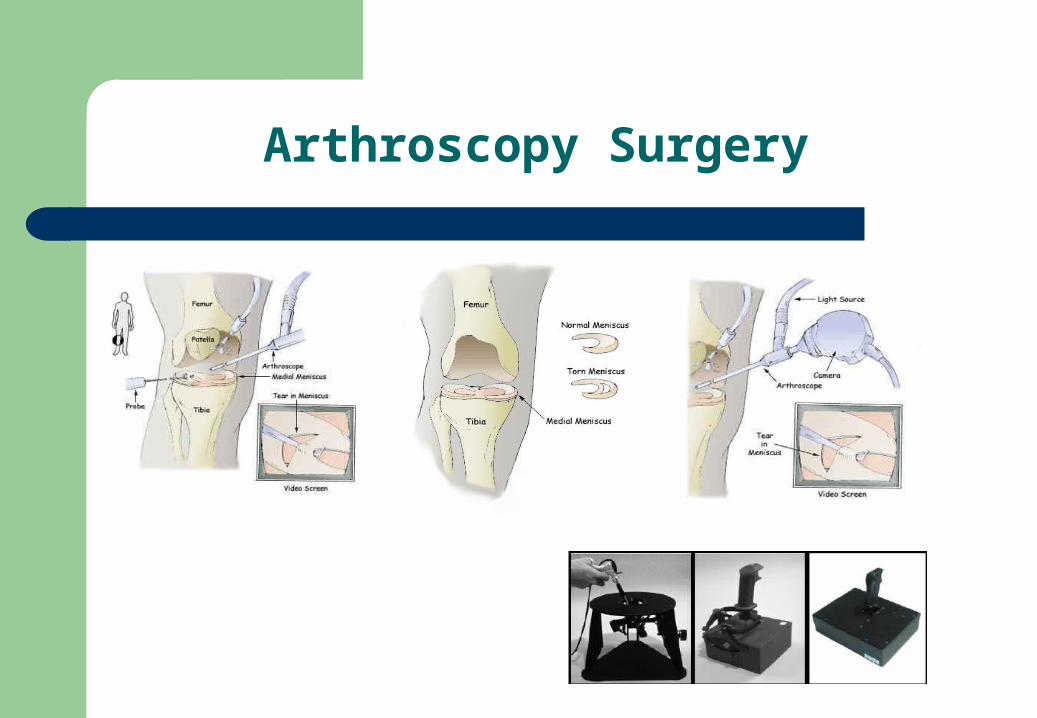
Arthroscopy Surgery
Virtual Arthroscopic Knee Surgery Training System
Modeling using data from Visible Human Project Simulation of the deformation of soft tissue with
topological change by FEA User interaction
– Force feedback
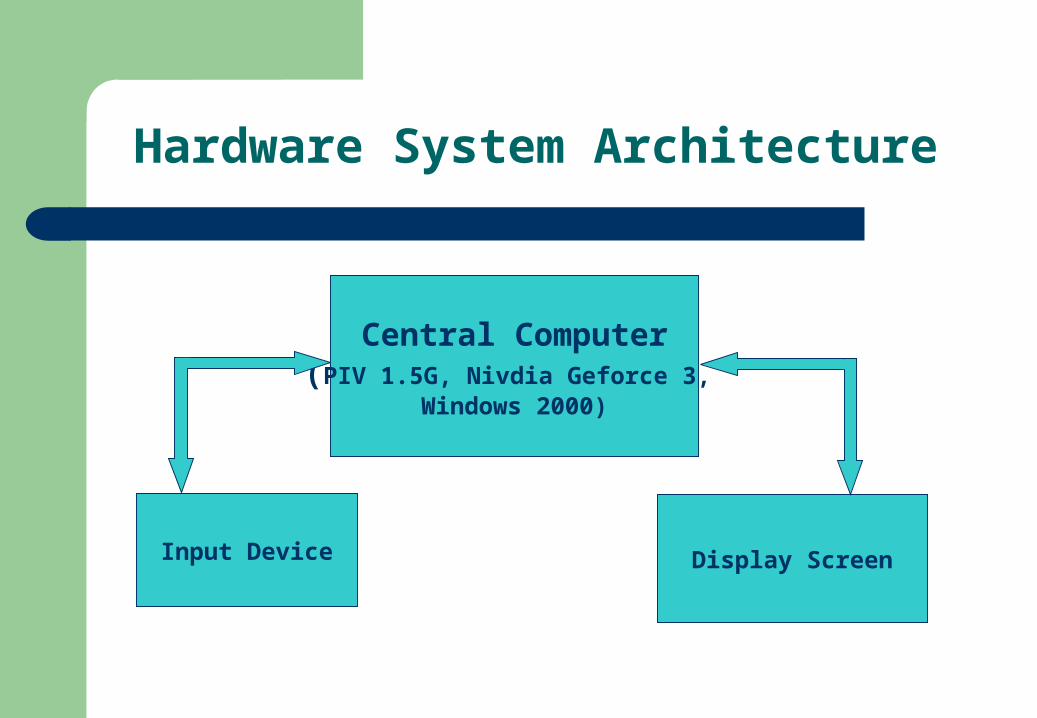
Hardware System Architecture
Central Computer(PIV 1.5G, Nivdia Geforce 3,
Windows 2000)
Input Device Display Screen
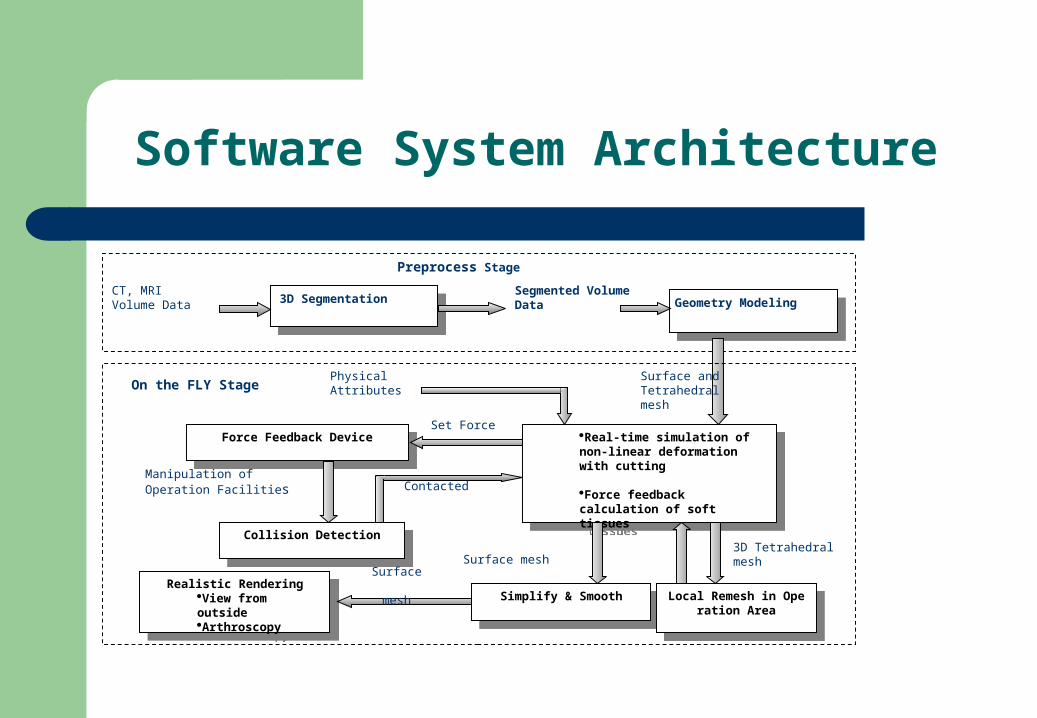
Software System Architecture
3D Segmentation3D Segmentation
CT, MRI Volume Data
Segmented Volume Data Geometry Modeling
Geometry Modeling
Preprocess Stage
Real-time simulation of non-linear deformation with cutting
Force feedback calculation of soft tissues
Real-time simulation of non-linear deformation with cutting
Force feedback calculation of soft tissues
Force Feedback DeviceForce Feedback Device
Physical Attributes
Set Force
Collision DetectionCollision Detection
Manipulation of Operation Facilities Contacted
Realistic RenderingView from outsideArthroscopy
Realistic RenderingView from outsideArthroscopy
Surface mesh
Simplify & SmoothSimplify & Smooth
Local Remesh in Operation Area
Local Remesh in Operation Area
On the FLY StageSurface and Tetrahedral mesh
3D Tetrahedral mesh
Surface
mesh
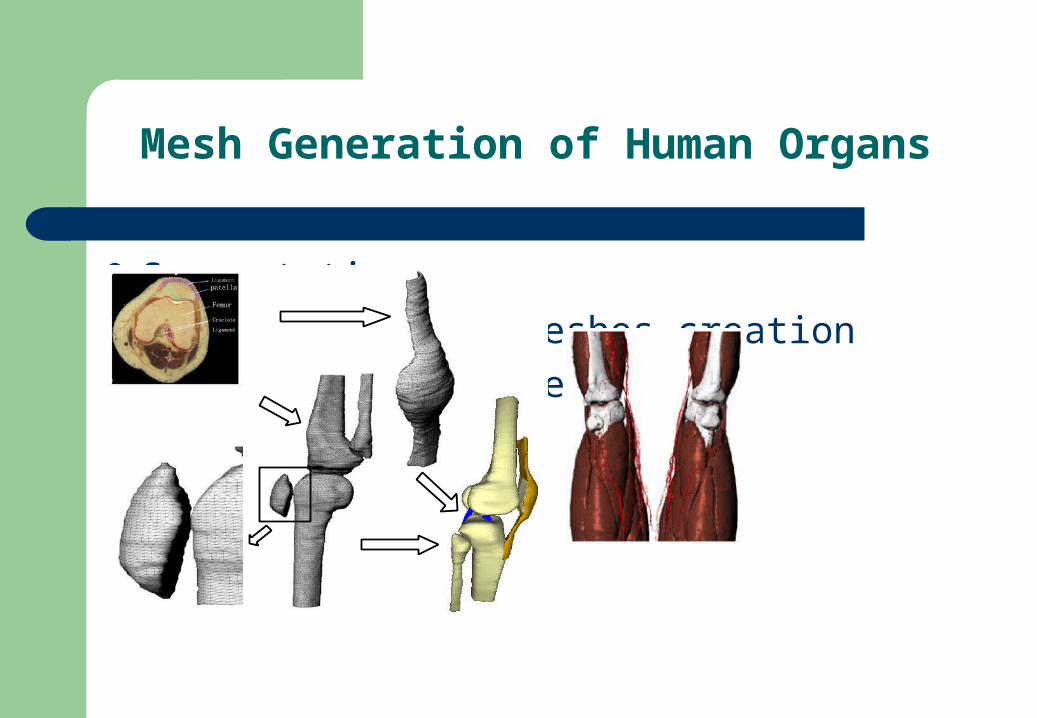
Mesh Generation of Human Organs
Segmentation Surface boundary meshes creation Tetrahedral mesh generation Mesh smoothing
Collision Detection
Prevent the arthroscope and operation facility from entering a solid object
Get the initial intersection point for cutting simulation
Collision detection for deformable objects, different from that of rigid objects
AABB tree
Simulation of Soft Tissue Deformation With Flexible Cutting
Physically reality Real-time interaction
Hybrid Finite Element MethodHybrid Finite Element Method
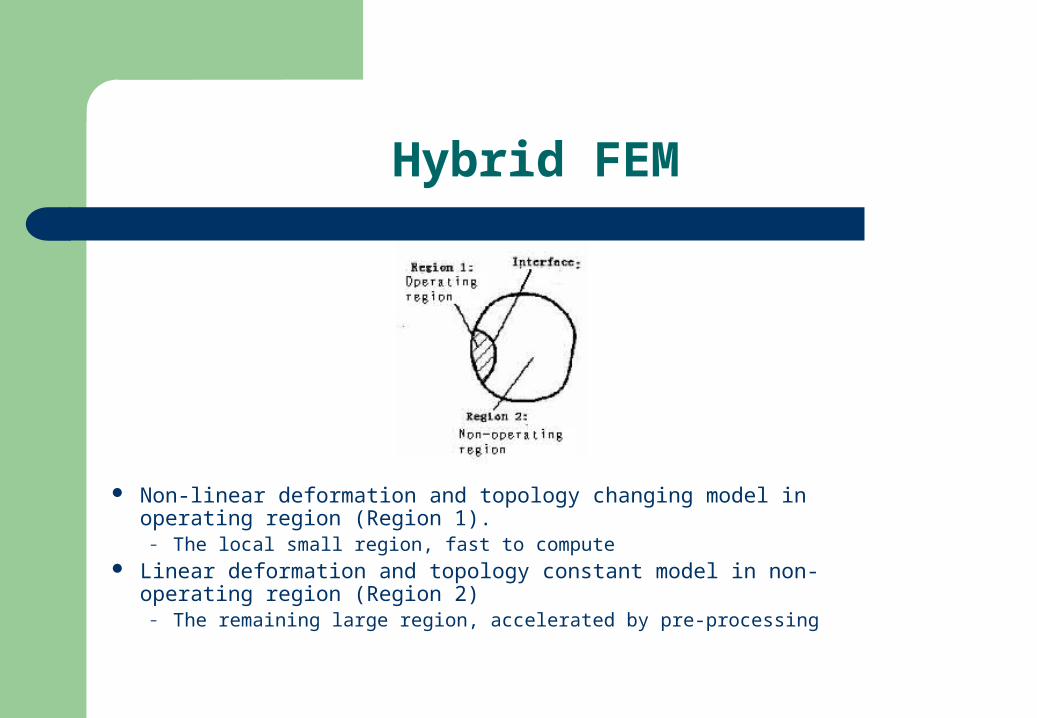
Hybrid FEM
Non-linear deformation and topology changing model in operating region (Region 1).
– The local small region, fast to compute Linear deformation and topology constant model in non-operating region
(Region 2)– The remaining large region, accelerated by pre-processing
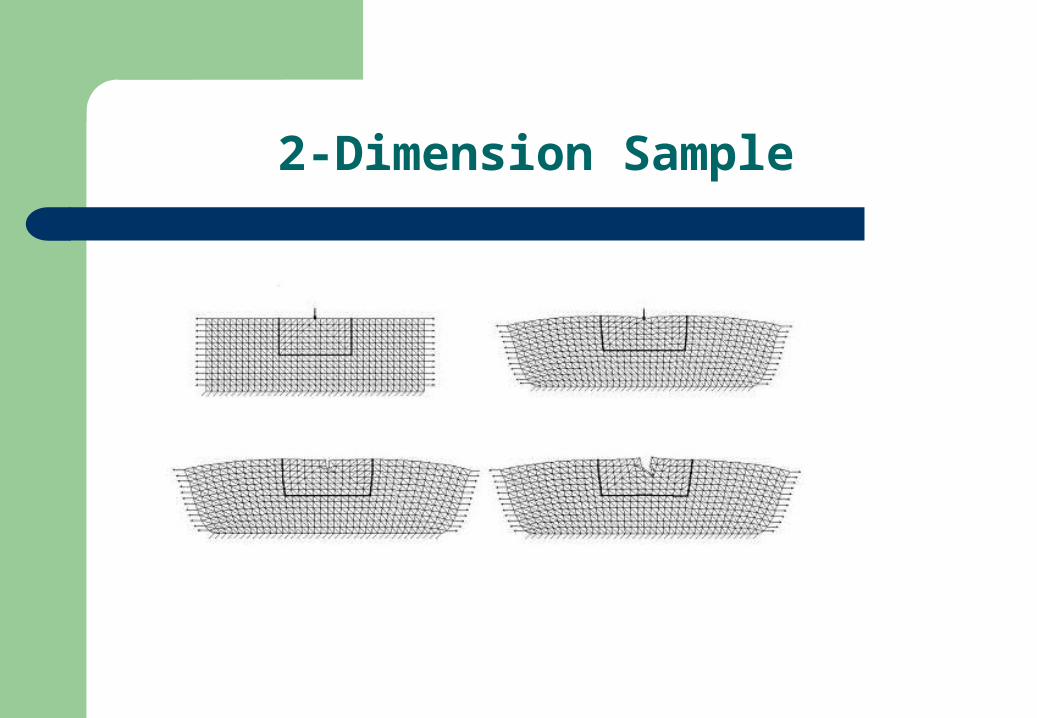
2-Dimension Sample
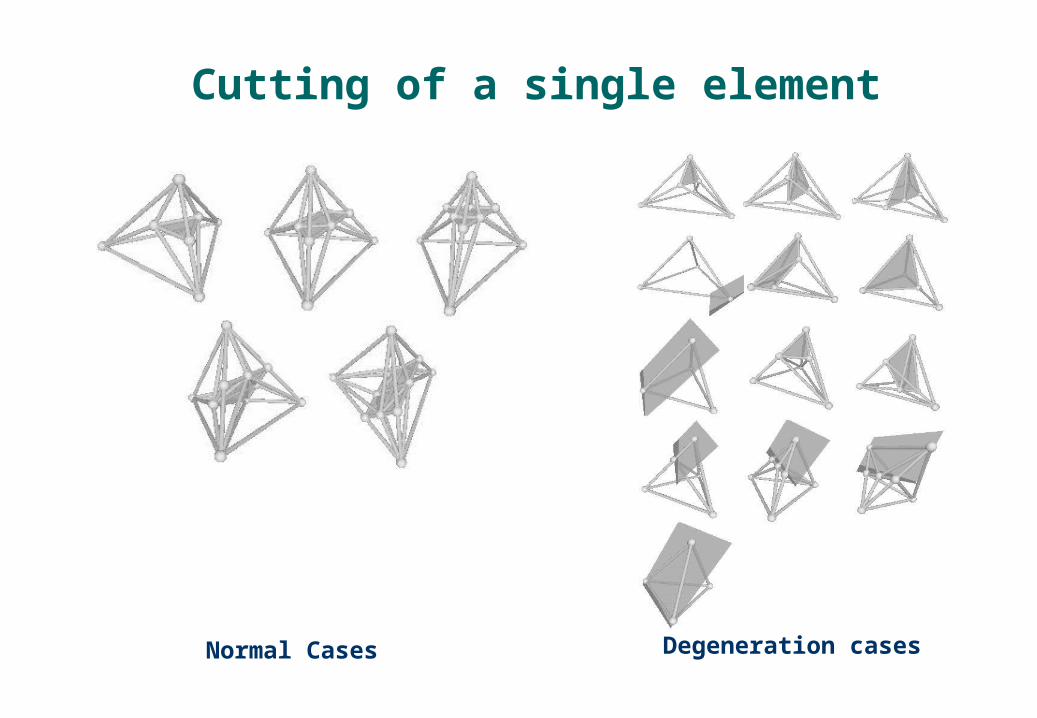
Cutting of a single element
Normal Cases Degeneration cases
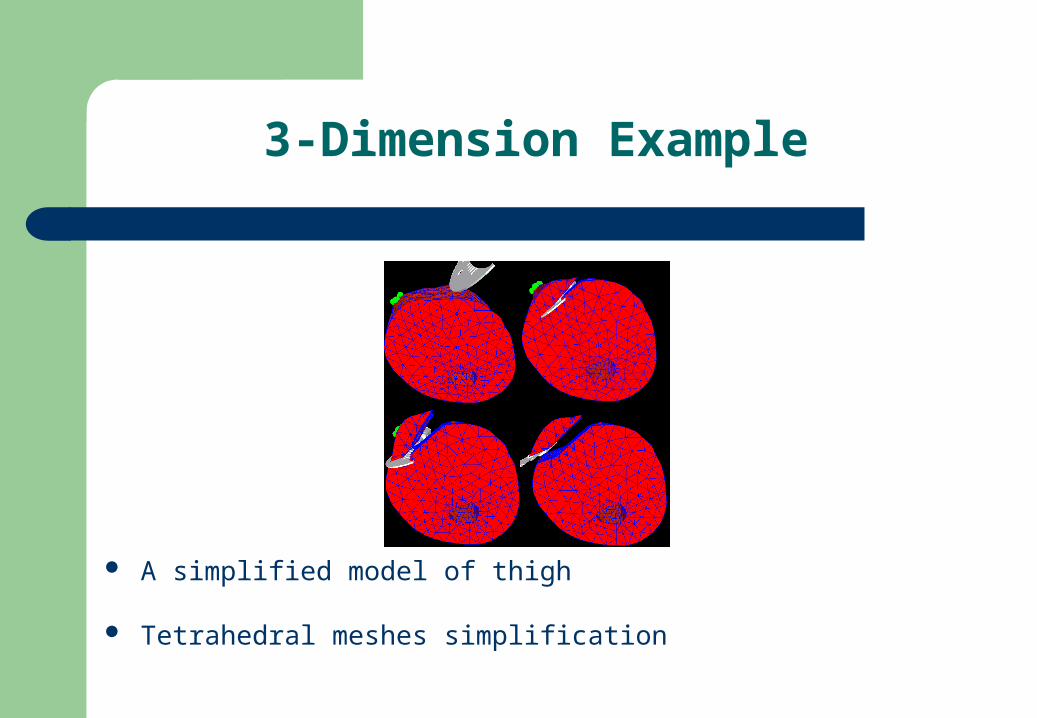
3-Dimension Example
A simplified model of thigh
Tetrahedral meshes simplification
Input Device
Four DOFs for arthroscope and instruments– Pitch– Yaw– Insertion– Rotation
Force feedback– Three DC motors attached for the first three DOF– The fourth DOF need no force feedback
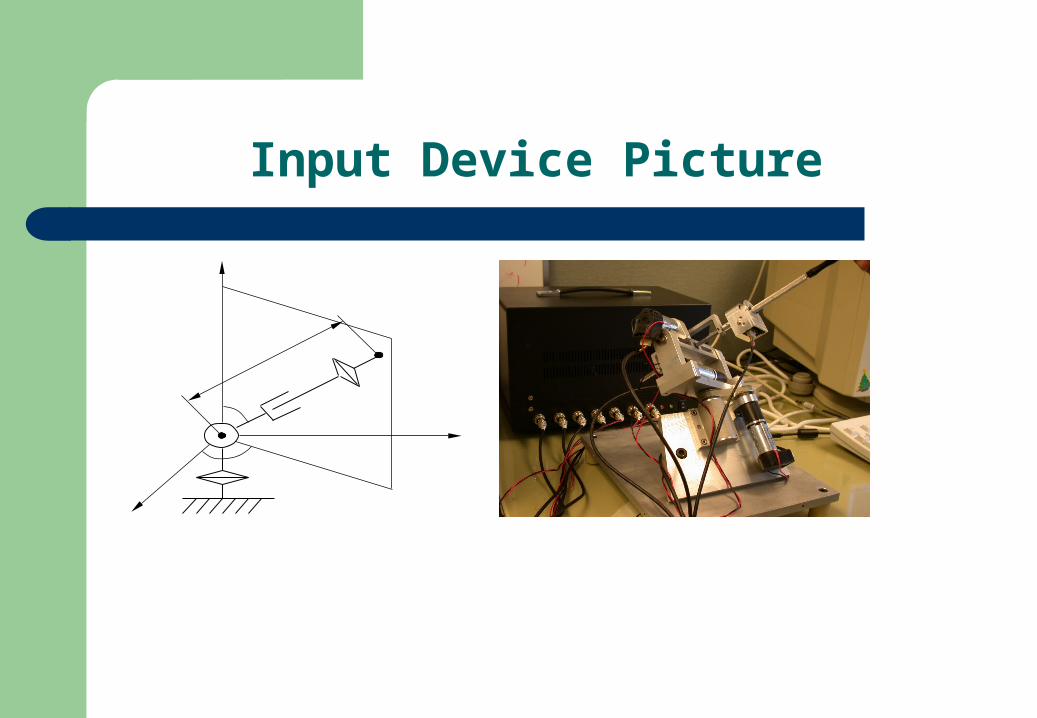
Input Device Picture
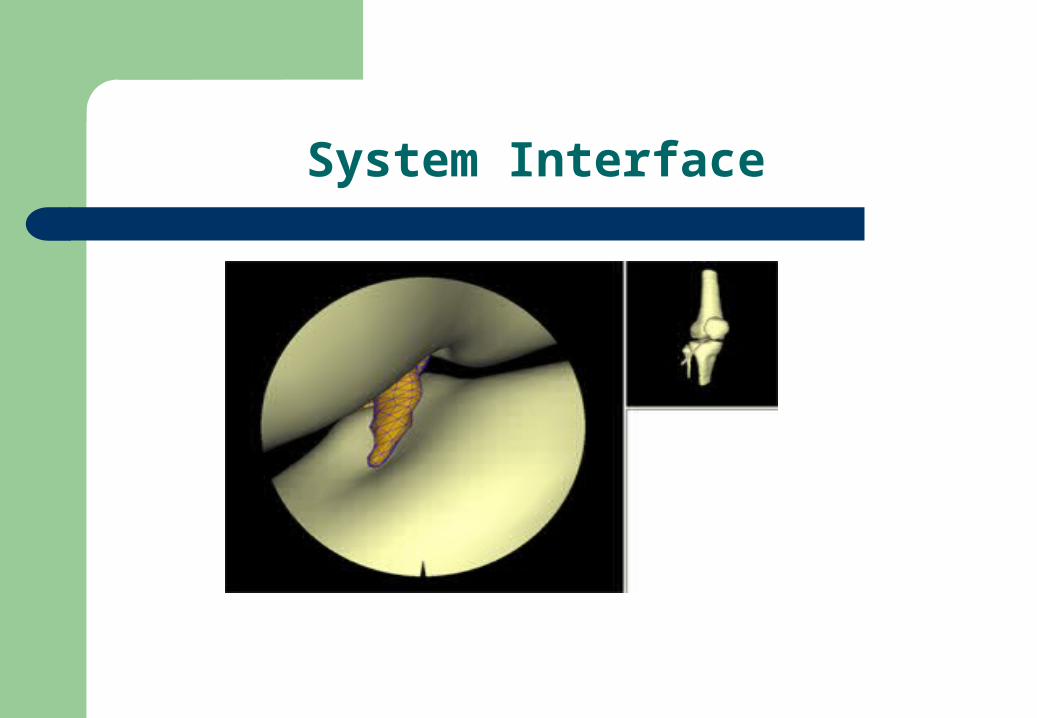
System Interface
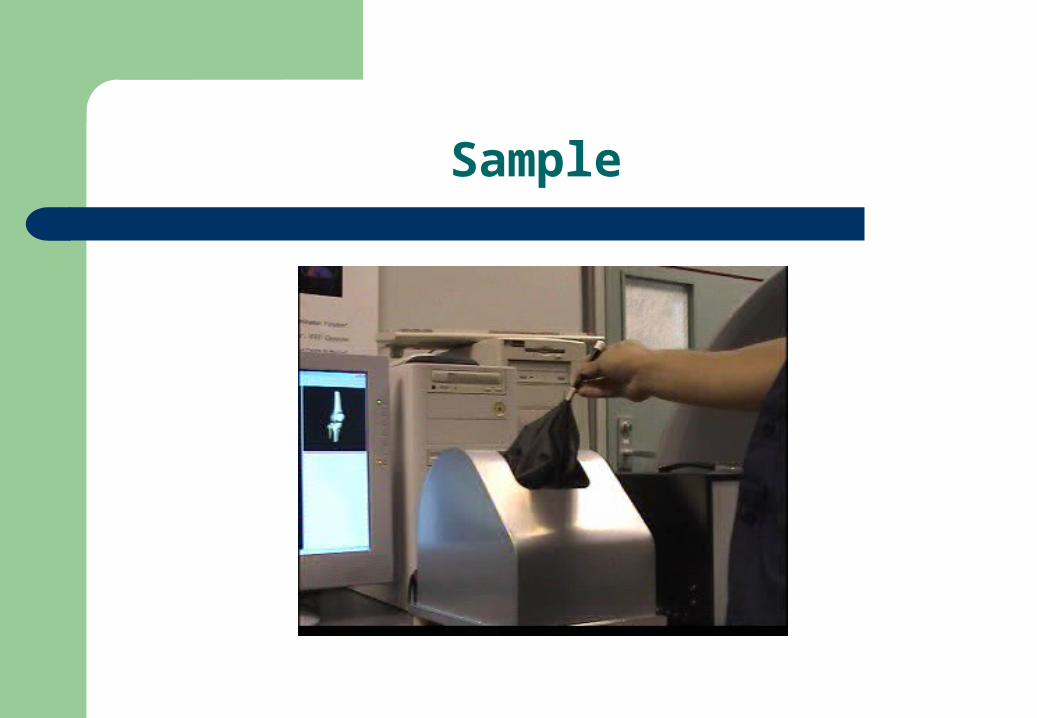
Sample
Work to do
More effective interactive 3-D segmentation system Realistic Rendering Simulation of complicated operation facilities
Tetrahedral Mesh Generation of Human Organs on Segmented Volume
Tetrahedralization Algorithm on Segmented Volume
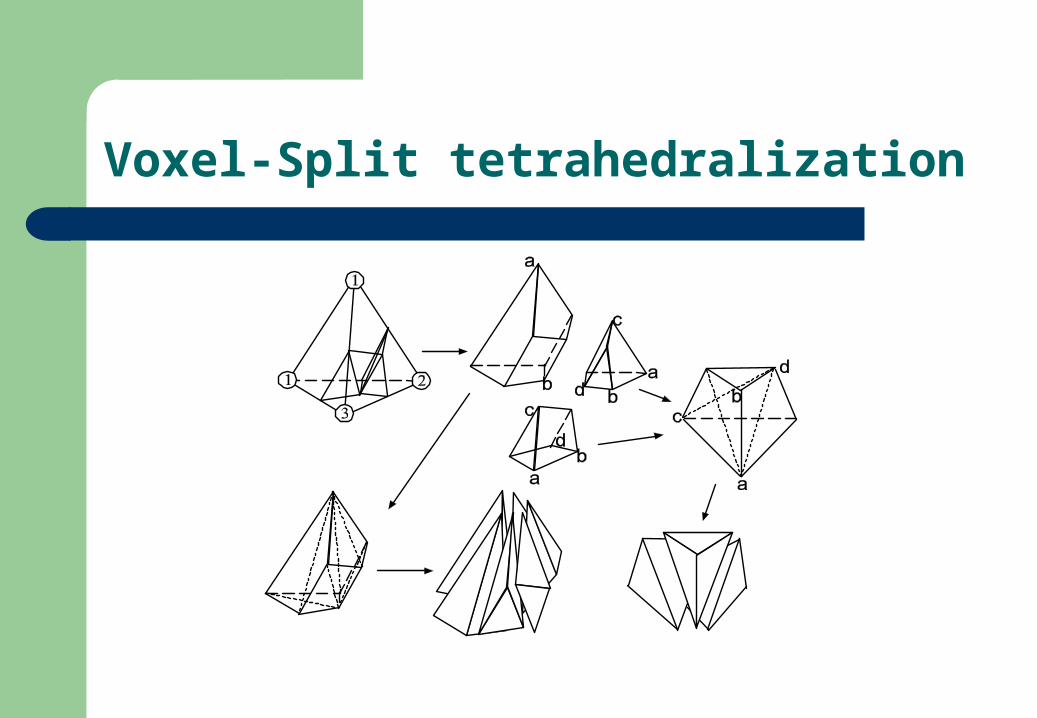
Voxel-Split tetrahedralization
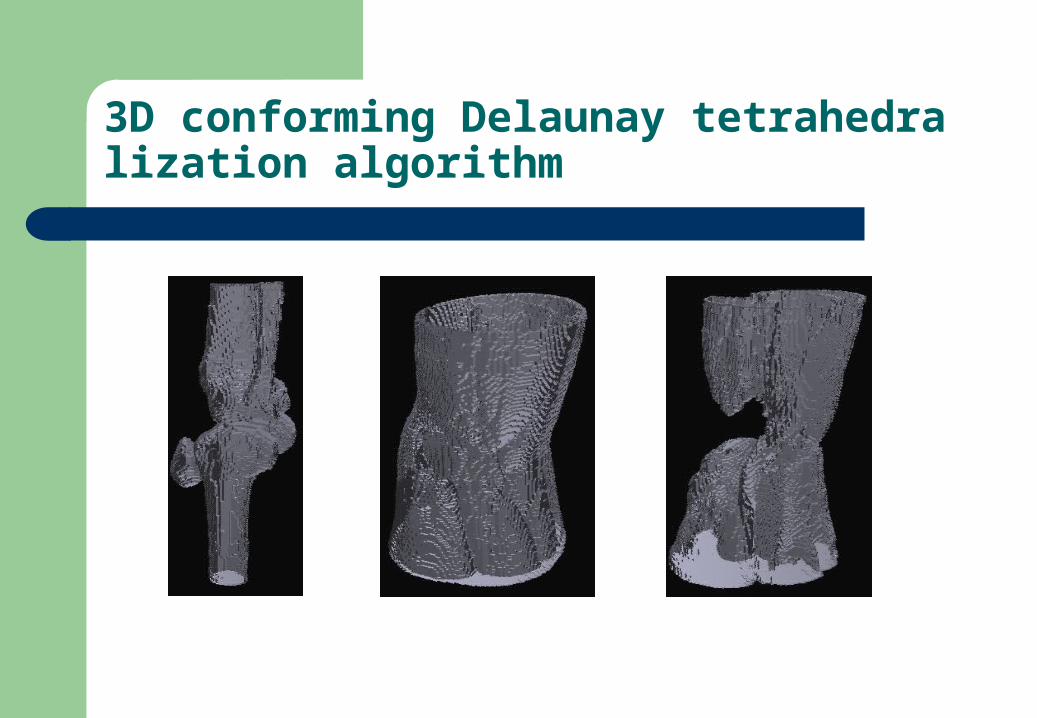
3D conforming Delaunay tetrahedralization algorithm
Feature point based tetrahedralization
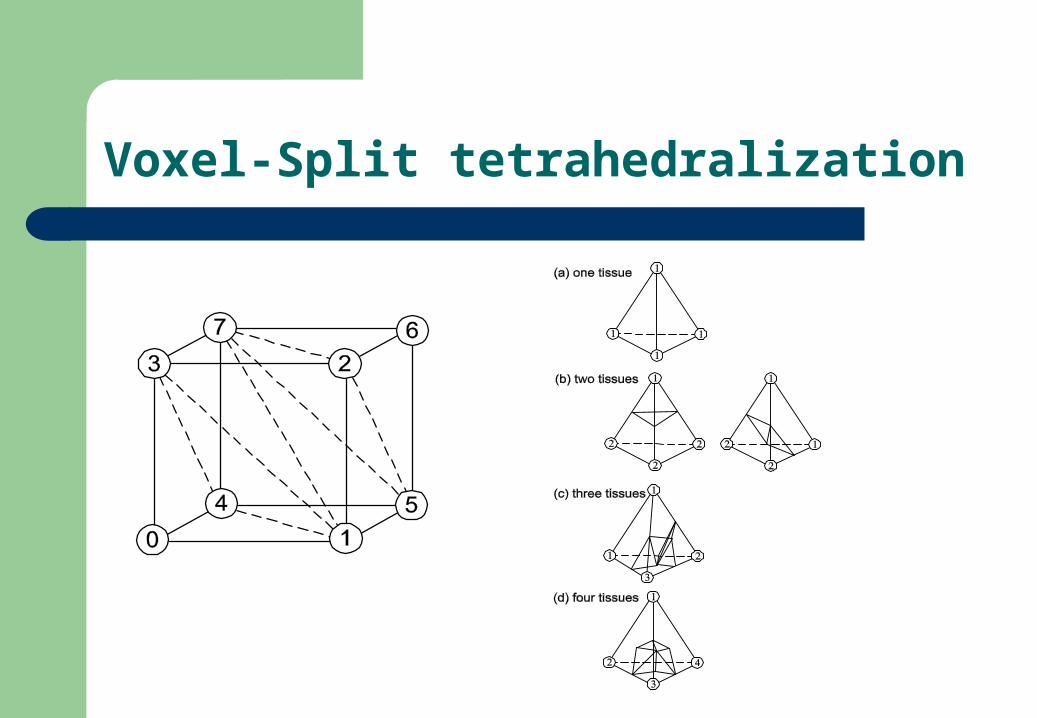
Voxel-Split tetrahedralization
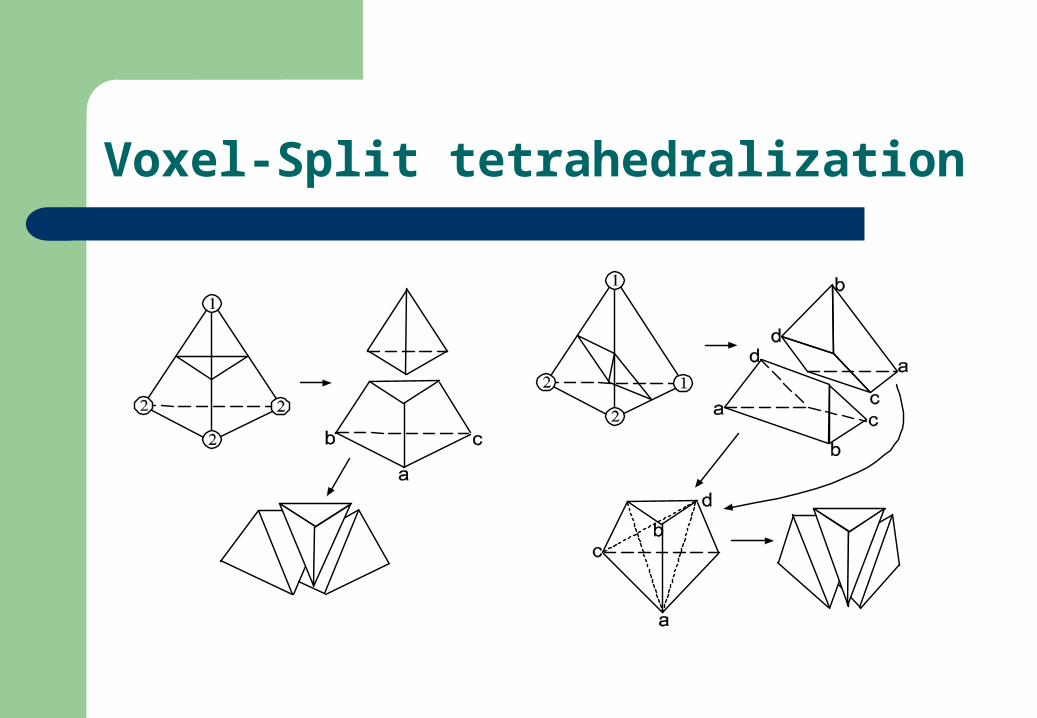
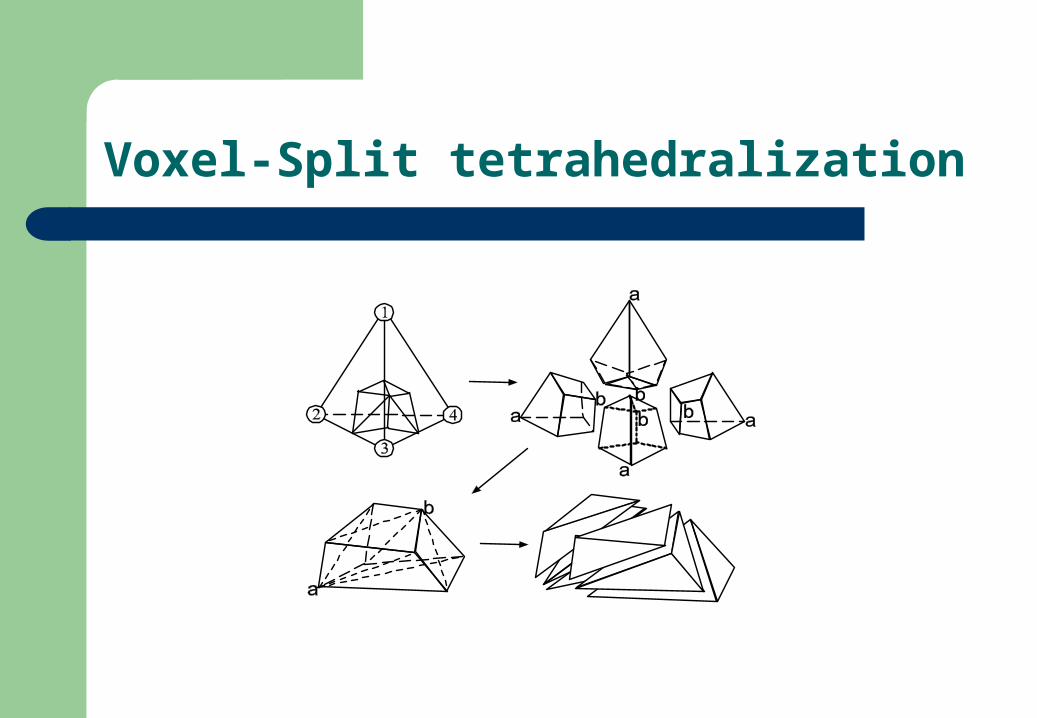
Voxel-Split tetrahedralization
Voxel-Split tetrahedralization
Voxel-Split tetrahedralization
Voxel-Split tetrahedralization
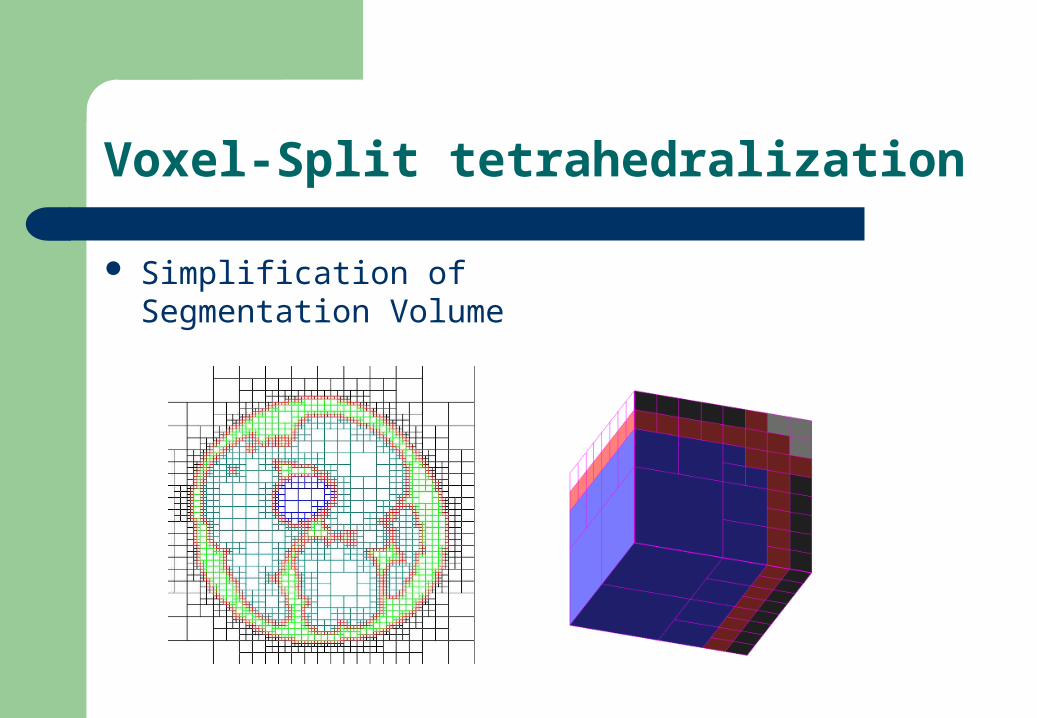
Simplification of Segmentation Volume
Voxel-Split tetrahedralization
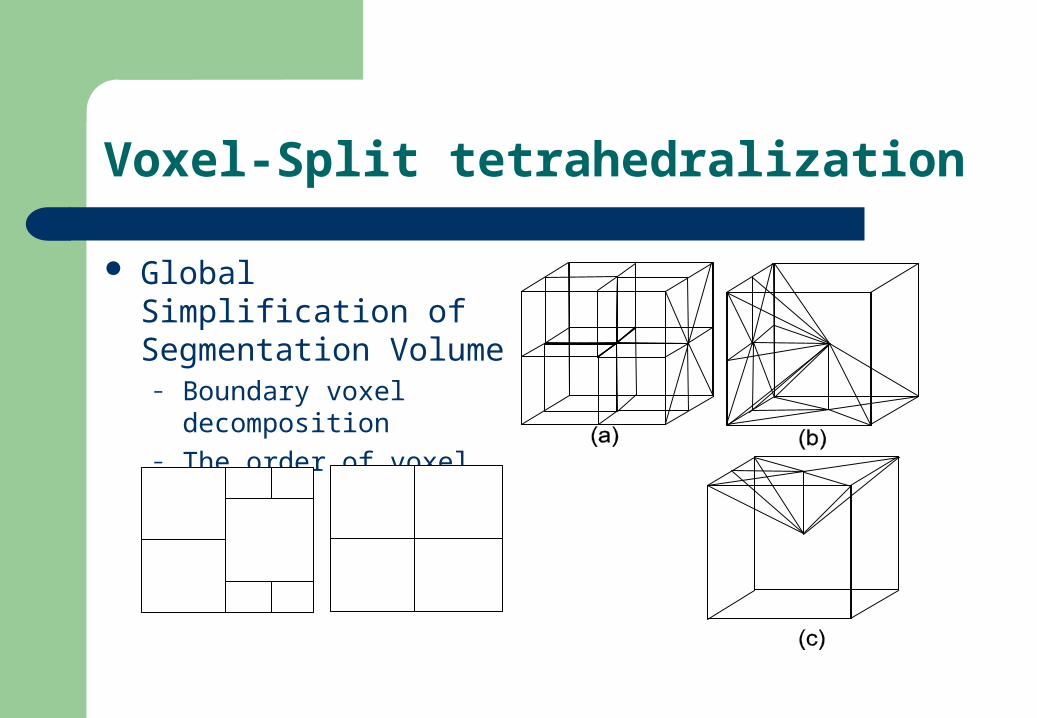
Global Simplification of Segmentation Volume
– Boundary voxel decomposition
– The order of voxel merge
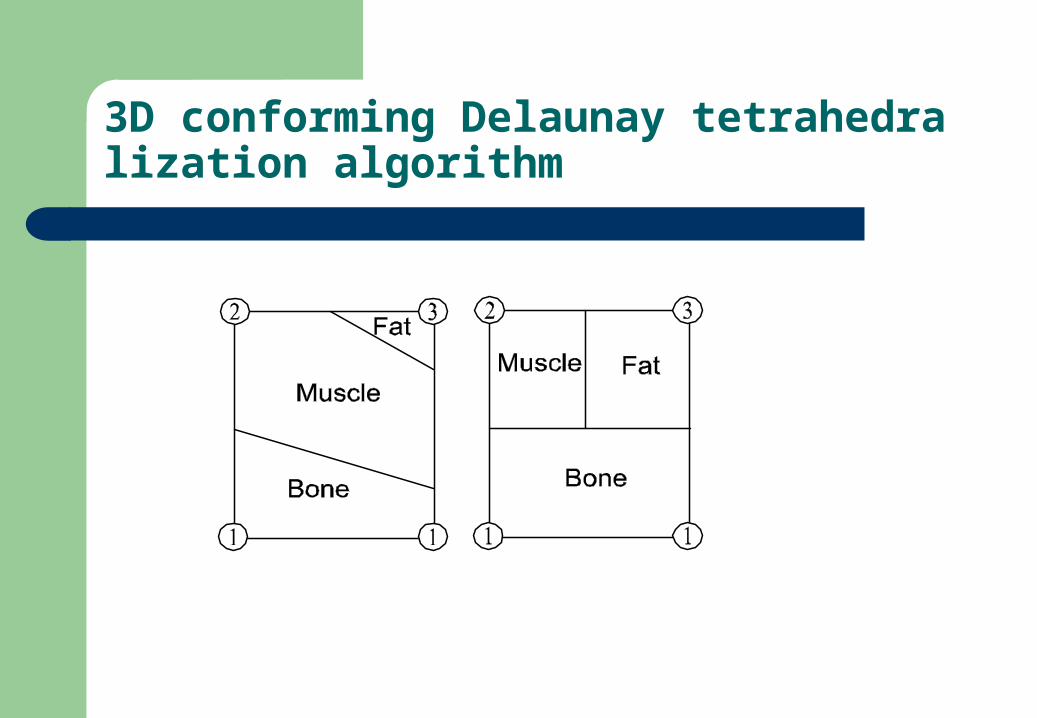
3D conforming Delaunay tetrahedralization algorithm
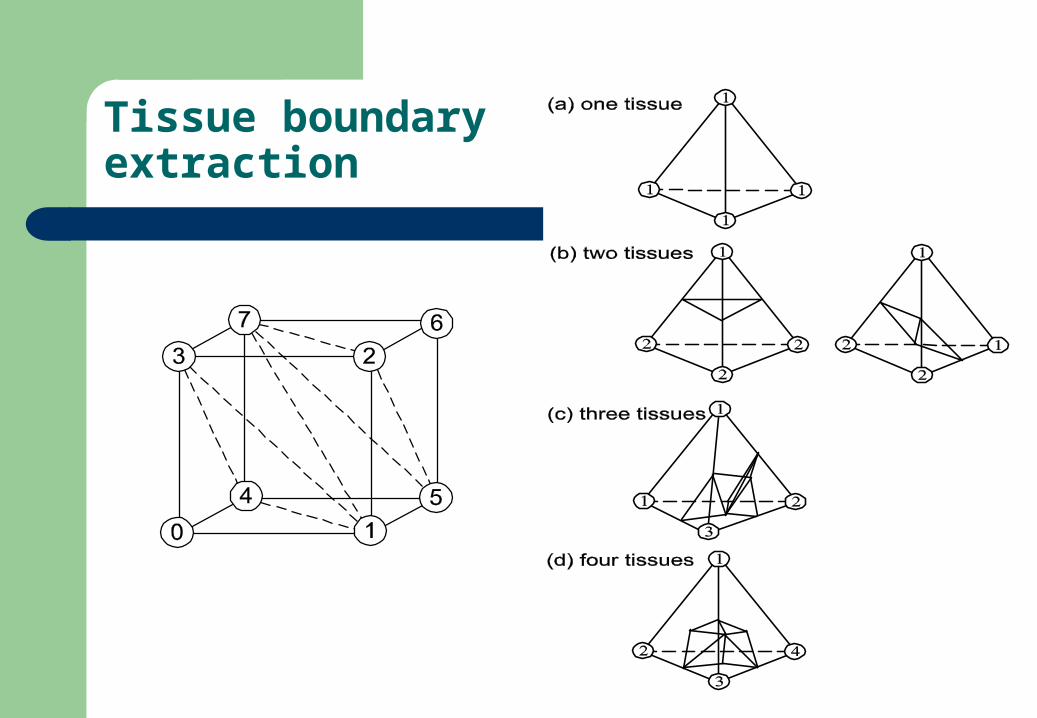
Tissue boundaryextraction
3D conforming Delaunay tetrahedralization algorithm
Feature point based tetrahedralization
Accurate.
Small scale.
Well-shaped.
Feature point based tetrahedralization
Placement of the mesh vertices Delaunay Triangulation Restore the tissue boundary and set element’s tis
sue type
Feature point based tetrahedralization
Point Displacement – feature point, steiner point and structured mesh point
Feature point based tetrahedralization
Feature Point
Feature point based tetrahedralization
Feature Point
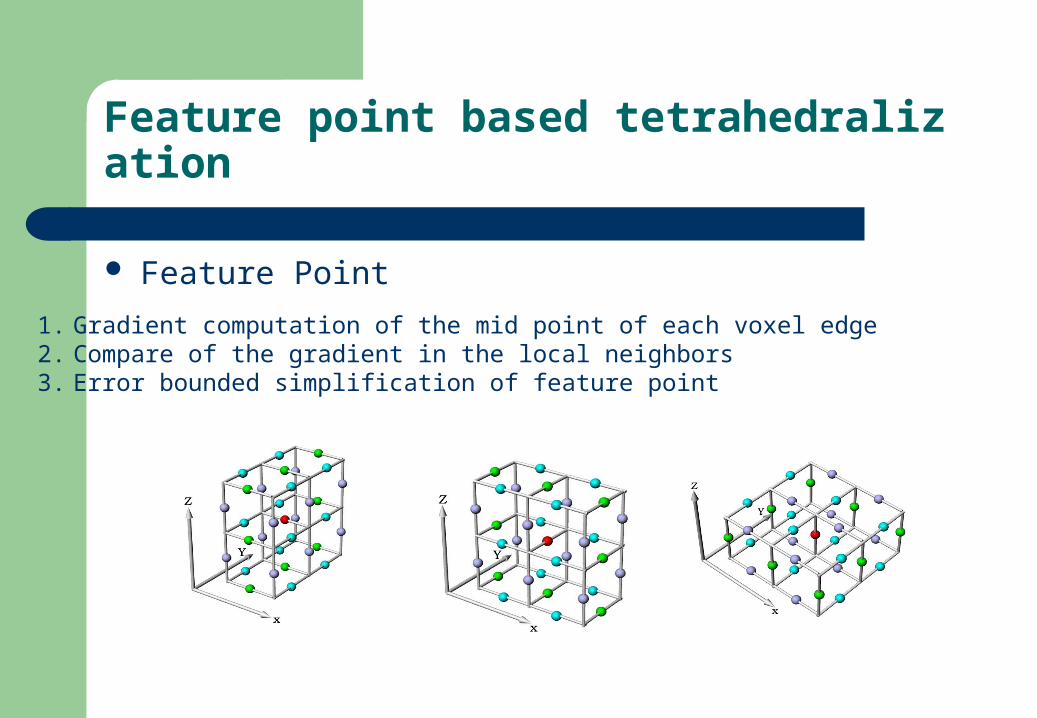
1. Gradient computation of the mid point of each voxel edge2. Compare of the gradient in the local neighbors3. Error bounded simplification of feature point
Feature point based tetrahedralization
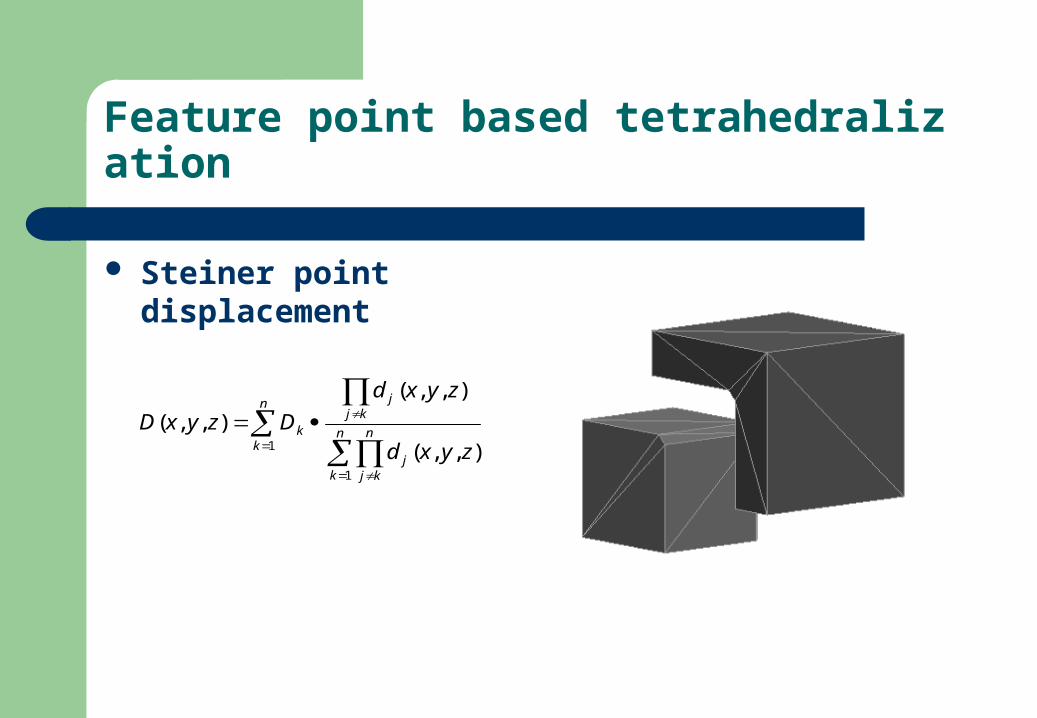
Steiner point displacement
n
kn
k
n
kjj
kjj
k
zyxd
zyxd
DzyxD1
1
),,(
),,(
),,(
Feature point based tetrahedralization
Feature point based tetrahedralization
Cross Tissue Boundary Detection
• Criterion for crossing boundary
• Boundary Points (BP)
• Voxel Points (VP)
• Edge: VP-VP BP-VP BP-BP
Feature point based tetrahedralization
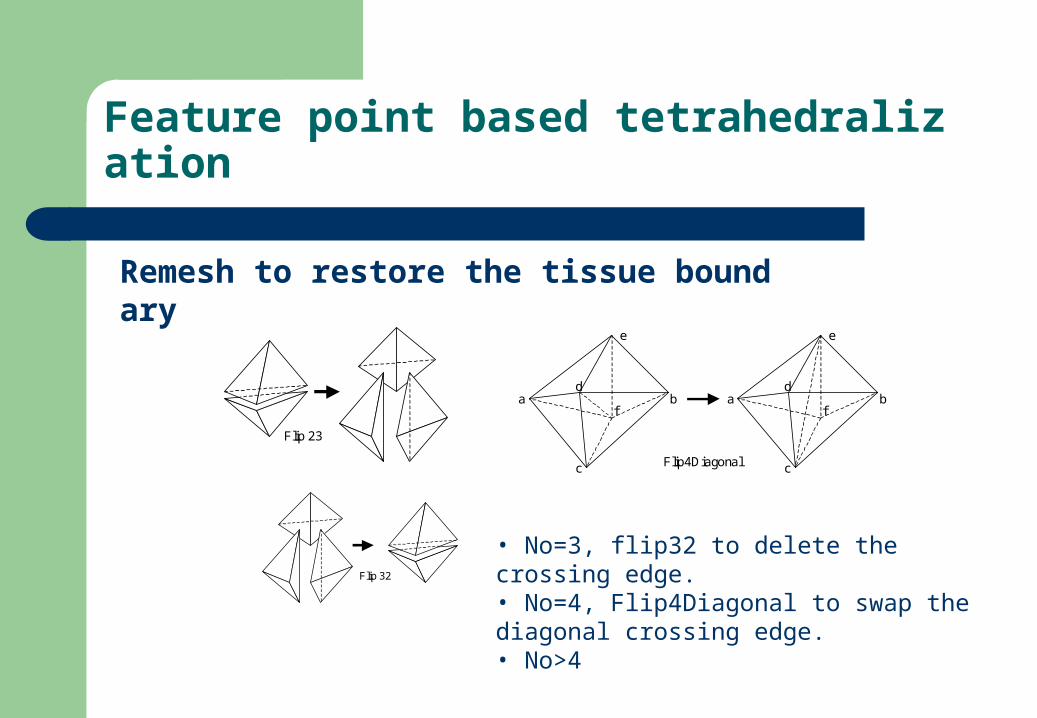
Remesh to restore the tissue boundary
Flip 23
Flip 32
c
f
e
d a b
c
f
e
d a b
Flip4Diagonal
• No=3, flip32 to delete the crossing edge.• No=4, Flip4Diagonal to swap the diagonal crossing edge.• No>4
Feature point based tetrahedralization
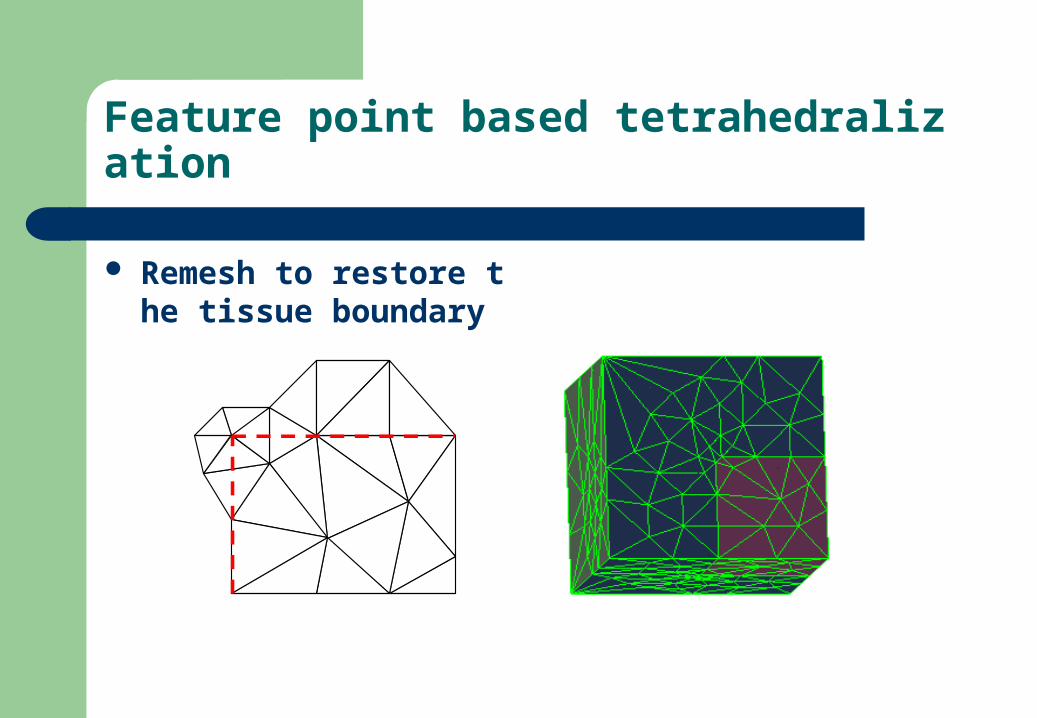
Remesh to restore the tissue boundary
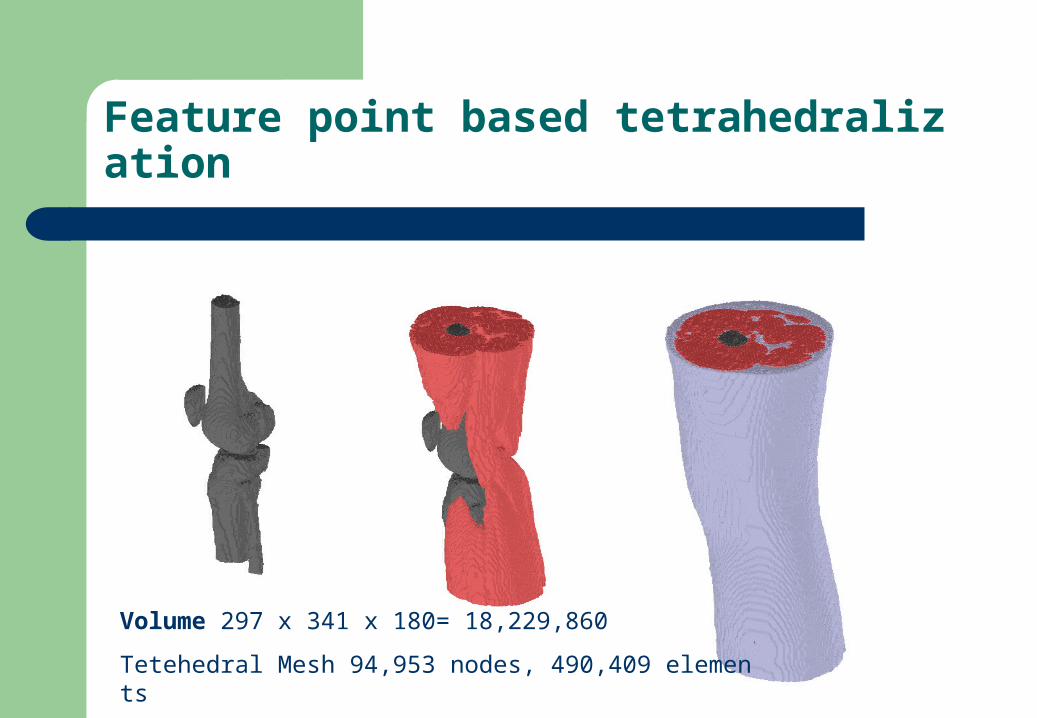
Feature point based tetrahedralization
Volume 297 x 341 x 180= 18,229,860
Tetehedral Mesh 94,953 nodes, 490,409 elements
Thanks