v spostamenti - dima - sapienza - università di...
TRANSCRIPT

______________________________________________________________________
Capitolo V ______________________________________________________________________
Spostamenti
2.2 Sistema di travi determinato Con riferimento al sistema di travi isostatico, studiato in §II.6.2, è possibile determinare il campo di spostamento e rotazione a partire dalla conoscenza del campo della forza assiale, rappresentato in Fig. II.37b. Il materiale costituente le travi sia caratterizzato da comportamento elastico lineare omogeneo (N=Aεm), le travi siano puramente estensibili (B,C→∞) e uniformemente rettilinee a tratti (A = costz); i problemi flessionale ed esten-sionale sono accoppiati.
Il problema estensionale è governato dall’Eq. (1.10) che scritta per ciascuno dei due tratti assume la forma:
Ni = A wi’ (i = 1, 2) ; ed integrata diventa:
wi(zi) = Ni/A zi + cwi , essendo Ni = costzi nell’esempio considerato e dove le variabili zi indicano le ascisse rettilinee istituite su ciascuno dei due tratti regolari di trave con origine nei posti qa e qb rispettivamente, Figg. II.34 e 2.
Il problema flessionale obbedisce all’Eq. (1.18) con M≡0:
vi’’ = 0 (i = 1, 2) , che integrata fornisce:
vi’(zi) = cvi1, vi(zi) = cvi1 zi + cvi2 .
Si impone quindi nei vincoli esterni ed interni il rispetto delle 6 condizioni al contorno di tipo cinematico:
d1(0)·n = 0 , θ1(0) = 0 , d2(0) = 0 , d2(l2) - d1(l1) = 0 .

Meccanica della Trave ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Ugo A. Andreaus - SCIENZA DELLE COSTRUZIONI • Progetto Leonardo - Editrice Esculapio - Bologna
106
Osservando che l1 = l√2, l2=l, e n=k1, le equazioni precedenti diventano: 1) w1(0) = 0, 2) θ1(0) = –v1’(0) = 0, 3) w2(0) = 0, 4) v2(0) = 0, 5,6) w2(l2)k2 + v2(l2)j2 = w1(l1)k1 + v1(l1)j1 . L’identificazione k1 = √2/2 (-k2+j2), j1 = -√2/2 (k2+j2) permette di scrivere in forma scalare le equazioni 5,6):
5) – √2/2 w1(l1) – √2/2 v1(l1) = w2(l2), 6) √2/2 w1(l1) – √2/2 v1(l1) = v2(l2),
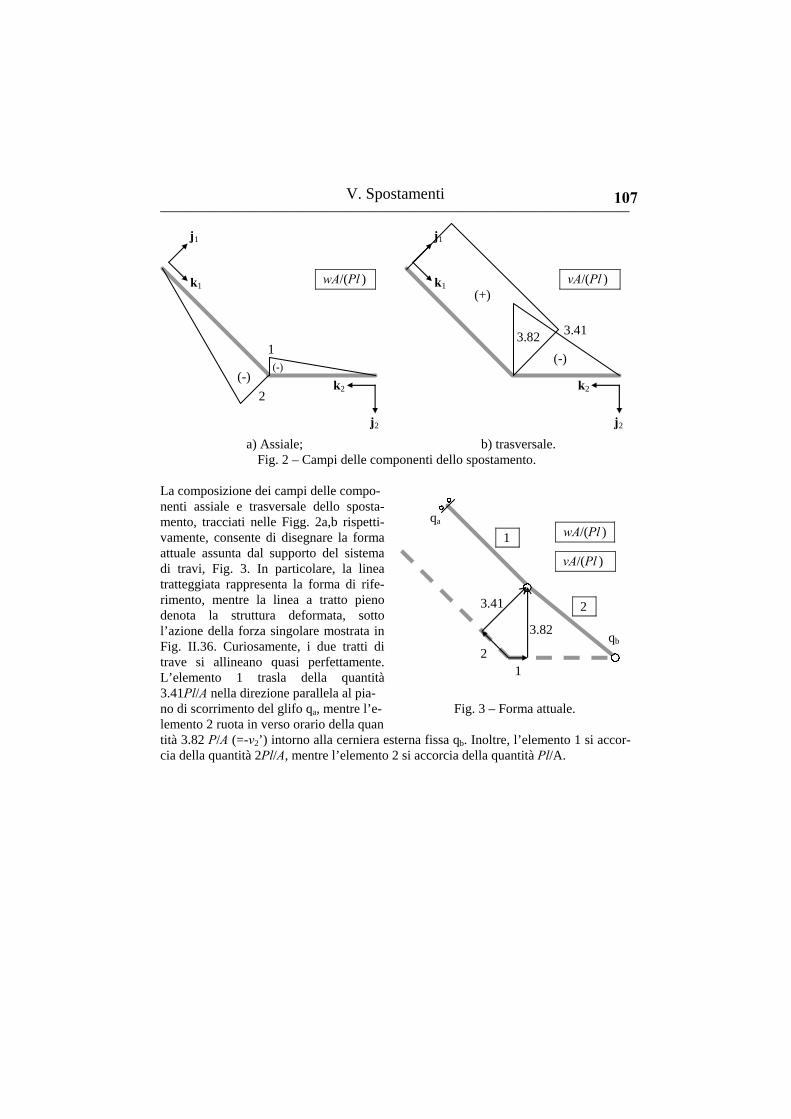
Risolvendo il seguente sistema di equazioni algebriche lineari: cw1 = 0, cv11 = 0, cw2 = 0, cv22 = 0, – √2/2 [(–2Pl/A) + cv12] = (–Pl/A), √2/2 [(–2Pl/A) – cv12] = cv21 l. si possono determinare le 6 costanti di integrazione fin ora incognite: cw1 = cv11 = cw2 = cv22 = 0, cv12 = (2 + √2) Pl/A ≅ 3.41 Pl/A, cv21 = – (1+ 2√2) P/A ≅ – 3.82 Pl/A. I campi delle componenti di spostamento, Fig. 2, w1, w2, e v2 risultano pertanto lineari:
w1 = –P√2/A z1, w2 = –P/A z2, v2 = – (1+ 2√2) P/A z2, Min w1 = –2 Pl/A, Min w2 = –Pl/A, Min v2 ≅ – 3.82 Pl/A.
mentre la componente v1 è costante:
v1 = (2 + √2) Pl/A ≅ 3.41 Pl/A.
V. Spostamenti ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
107
j2
k2
k1
j1
(-) 1
(-) 2
wA/(Pl )
j2
k2
k1
j1
(-) 3.82
(+)
3.41
vA/(Pl )
a) Assiale; b) trasversale.
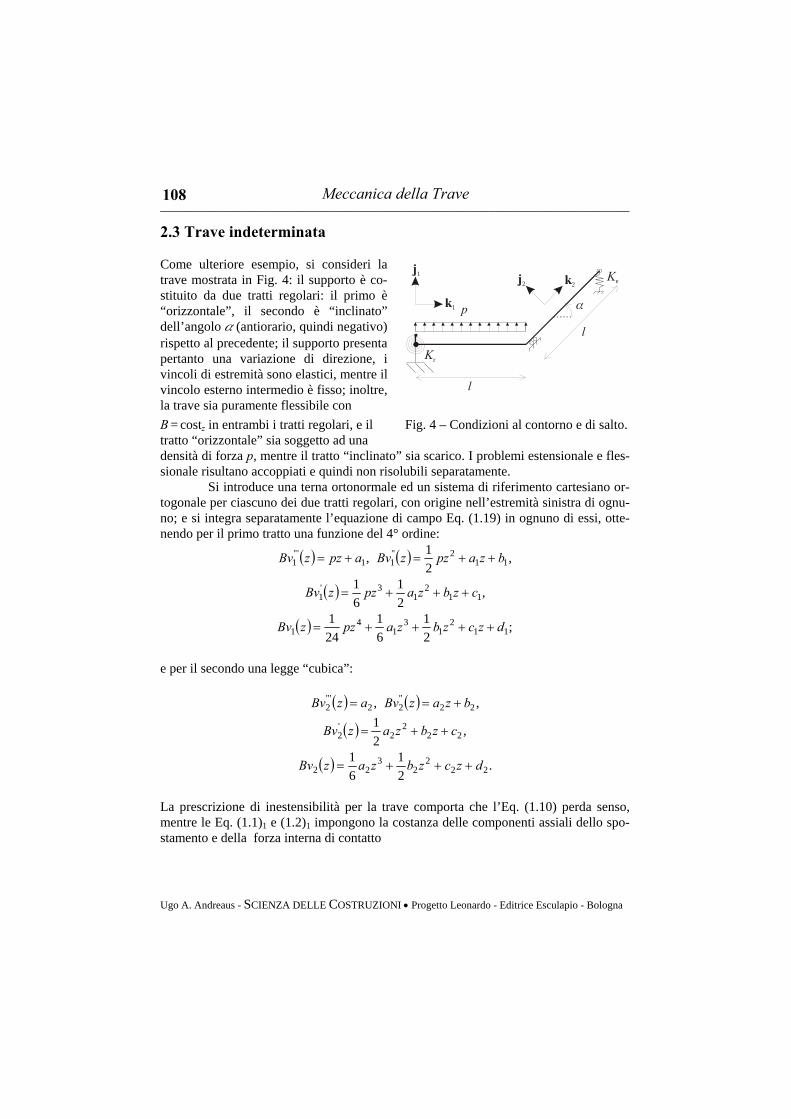
Fig. 2 – Campi delle componenti dello spostamento. La composizione dei campi delle compo- nenti assiale e trasversale dello sposta-mento, tracciati nelle Figg. 2a,b rispetti-vamente, consente di disegnare la forma attuale assunta dal supporto del sistema di travi, Fig. 3. In particolare, la linea tratteggiata rappresenta la forma di rife-rimento, mentre la linea a tratto pieno denota la struttura deformata, sotto l’azione della forza singolare mostrata in Fig. II.36. Curiosamente, i due tratti di trave si allineano quasi perfettamente. L’elemento 1 trasla della quantità 3.41Pl/A nella direzione parallela al pia-
2
1
qb
qa
12
3.41
3.82
vA/(Pl )
wA/(Pl )
no di scorrimento del glifo qa, mentre l’e- Fig. 3 – Forma attuale. lemento 2 ruota in verso orario della quan tità 3.82 P/A (=-v2’) intorno alla cerniera esterna fissa qb. Inoltre, l’elemento 1 si accor-cia della quantità 2Pl/A, mentre l’elemento 2 si accorcia della quantità Pl/A.
Meccanica della Trave ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Ugo A. Andreaus - SCIENZA DELLE COSTRUZIONI • Progetto Leonardo - Editrice Esculapio - Bologna
108
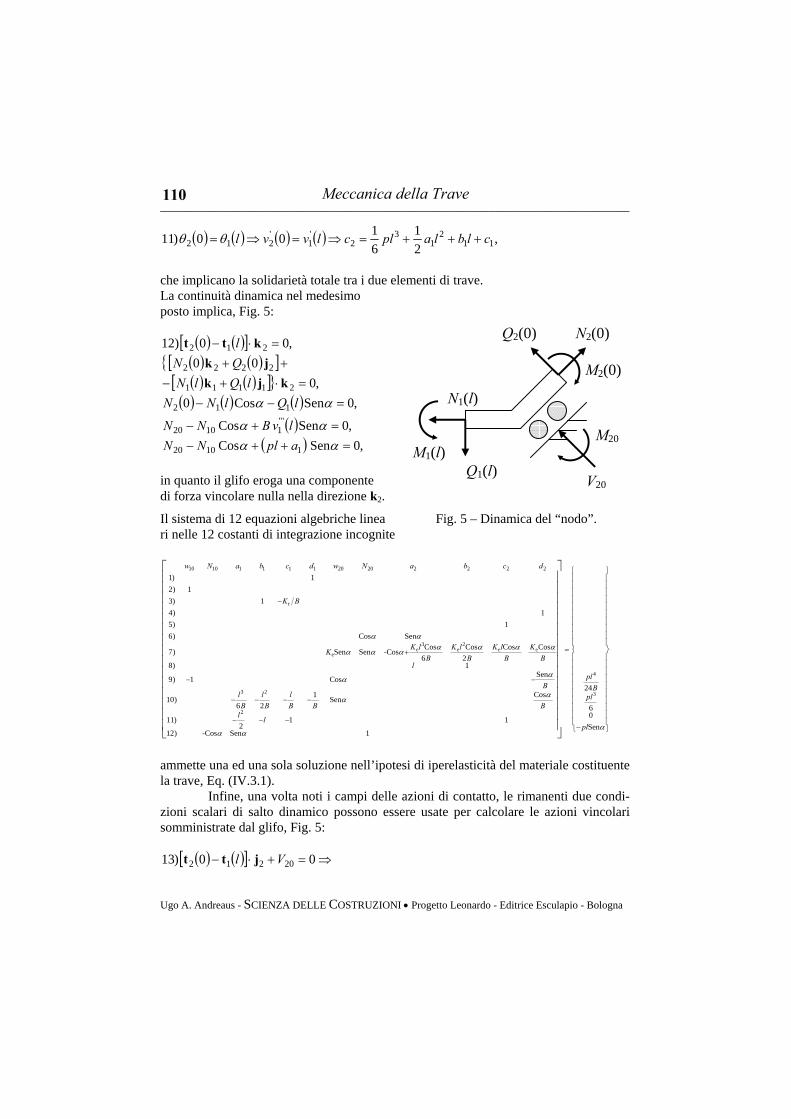
2.3 Trave indeterminata Come ulteriore esempio, si consideri la trave mostrata in Fig. 4: il supporto è co-stituito da due tratti regolari: il primo è “orizzontale”, il secondo è “inclinato” dell’angolo α (antiorario, quindi negativo) rispetto al precedente; il supporto presenta pertanto una variazione di direzione, i vincoli di estremità sono elastici, mentre il vincolo esterno intermedio è fisso; inoltre, la trave sia puramente flessibile con
p
Kr
l
l
Ke
αk1
j1 j2 k2
B = costz in entrambi i tratti regolari, e il Fig. 4 – Condizioni al contorno e di salto. tratto “orizzontale” sia soggetto ad una densità di forza p, mentre il tratto “inclinato” sia scarico. I problemi estensionale e fles-sionale risultano accoppiati e quindi non risolubili separatamente.
Si introduce una terna ortonormale ed un sistema di riferimento cartesiano or-togonale per ciascuno dei due tratti regolari, con origine nell’estremità sinistra di ognu-no; e si integra separatamente l’equazione di campo Eq. (1.19) in ognuno di essi, otte-nendo per il primo tratto una funzione del 4° ordine:
( ) ( ) ,21, 11
2"11
'"1 bzapzzBvapzzBv ++=+=
( ) ,21
61
112
13'
1 czbzapzzBv +++=
( ) ;21
61
241
112
13
14
1 dzczbzapzzBv ++++=
e per il secondo una legge “cubica”:
( ) ( ) ,, 22"22
'"2 bzazBvazBv +==
( ) ,21
222
2'2 czbzazBv ++=
( ) .21
61
222
23
22 dzczbzazBv +++=
La prescrizione di inestensibilità per la trave comporta che l’Eq. (1.10) perda senso, mentre le Eq. (1.1)1 e (1.2)1 impongono la costanza delle componenti assiali dello spo-stamento e della forza interna di contatto

V. Spostamenti ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
109
;0,0 202'2101
'1 wwwwww =⇒==⇒=
.0,0 202'2101
'1 NNNNNN =⇒==⇒=
Le condizioni al contorno nei vincoli esterni forniscono: 1) ( ) ,000 11 =⇒= dv 2) ( ) ,000 101 =⇒= ww
3) ( ) ( ) ( ) ( ) ,0000 1r
1'1r
"11r1 c
BKbvKvBKM =⇒=⇒= θ
per l’incastro “elastico” ; 4) ( ) ,000 22 =⇒= dv
5) ( ) ( ) ,00000 2'22 =⇒=⇒= cvθ
per il glifo fisso applicato alla estremità sinistra del tratto “inclinato” ; e
( ) ( ) ( )[ ] ( ) ( ) =−=⋅+⇒=⋅ αα SenCos0)6 221222212 lQlNlQlNl kjkkt
( ) ,0SenCos0SenCos 220'"
220 =+⇒=+= αααα aNlvBN ( ) ( )[ ] ( ) ( )[ ] ( ) ( )[ ] ⇒⋅+−=⋅+⇒⋅−=⋅ 12222e1222212e12)7 jjkjjkjdjt lvlwKlQlNlKl
( ) ( ) ( ) ( )[ ]⇒+−=+ αααα CosSenCosSen 22e22 lvlwKlQlN
( ) ( ) ( )[ ]⇒+−=− αααα CosSenCosSen 22e'"
220 lvlwKlvBN
,Cos21
611SenCosSen 22
22
3220e220 ⎥
⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ ++++−=− αααα dlclbla
BwKaN
( ) ( ) ,000)8 22"22 =+⇒=⇒= blalvlM
per la molla estensionale.
La continuità cinematica interna nel posto comune ai due tratti regolari si tra-duce nelle condizioni seguenti:
( ) ( ) ( ) ( ) ( ) ( ) ⇒+=+⇒= 1111222212 000 jkjkdd lvlwvwl ( )( ) ( )( ) ( ) ( ) ⇒+=+−++ 1111112112 CosSen0SenCos0 jkjkjk lvlwvw αααα ( ) ( ) ( ) ( ) ( ) ( )⇒=+=− lvvwlwvw 122122 Cos0Sen0,Sen0Cos0 αααα
,Sen1Cos)9 10220 wdB
w =− αα
,21
61
2411Cos1Sen)10 11
21
31
4220 ⎟
⎠⎞
⎜⎝⎛ ++++=+ dlclblapl
Bd
Bw αα
Meccanica della Trave ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Ugo A. Andreaus - SCIENZA DELLE COSTRUZIONI • Progetto Leonardo - Editrice Esculapio - Bologna
110
( ) ( ) ( ) ( ) ,21
6100)11 11
21
32
'1
'212 clblaplclvvl +++=⇒=⇒= θθ
che implicano la solidarietà totale tra i due elementi di trave. La continuità dinamica nel medesimo posto implica, Fig. 5:
( ) ( )[ ] ,00)12 212 =⋅− ktt l ( ) ( )[ ] ++ 2222 00 jk QN ( ) ( )[ ] ,021111 =⋅+− kjk lQlN
( ) ( ) ( ) ,0SenCos0 112 =−− αα lQlNN
( ) ,0SenCos '"11020 =+− αα lvBNN
( ) ,0SenCos 11020 =++− αα aplNN in quanto il glifo eroga una componente di forza vincolare nulla nella direzione k2.
Q1(l) M1(l)
N1(l)
M2(0)
N2(0) Q2(0)
V20
M20
Il sistema di 12 equazioni algebriche linea Fig. 5 – Dinamica del “nodo”. ri nelle 12 costanti di integrazione incognite
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪
⎨
⎧
−
=
−−−
−−−−
−−
+
−
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
ααα
αα
αα
ααααααα
αα
Sen06
24
1SenCos-)12
112
)11
CosSen126
)10
SenCos1)9
1)8
CosCos2Cos
6CosCos-SenSen)7
SenCos)61)5
1)41)3
1)21)1
3
4
2
23
ee2
e3
ee
r
2222202011111010
pl
plB
pl
llBBB
lB
lB
lB
lB
KB
lKB
lKB
lKK
BK
dcbaNwdcbaNw
ammette una ed una sola soluzione nell’ipotesi di iperelasticità del materiale costituente la trave, Eq. (IV.3.1).
Infine, una volta noti i campi delle azioni di contatto, le rimanenti due condi-zioni scalari di salto dinamico possono essere usate per calcolare le azioni vincolari somministrate dal glifo, Fig. 5:
( ) ( )[ ] ⇒=+⋅− 00)13 20212 Vl jtt
V. Spostamenti ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
111
( ) ( )[ ] ( ) ( )[ ] ⇒=+⋅+−+⇒ 000 20211112222 VlQlNQN jjkjk ( ) ( ) ( ) ⇒=+−+⇒ 0CosSen0 20112 VlQlNQ αα
( ) ( ) ⇒=+++−⇒ 0CosSen0 20'"
110'"
2 VlvBNvB αα( ) ,0CosSen 201102 =++++−⇒ VaplNa αα
( ) ( )[ ] ( ) ( )[ ] ⇒=++−⇒=+− 0000)14 20"1
"22012 MlvBvBMlMM
.021
20112
2 =+⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ +++− Mblaplb
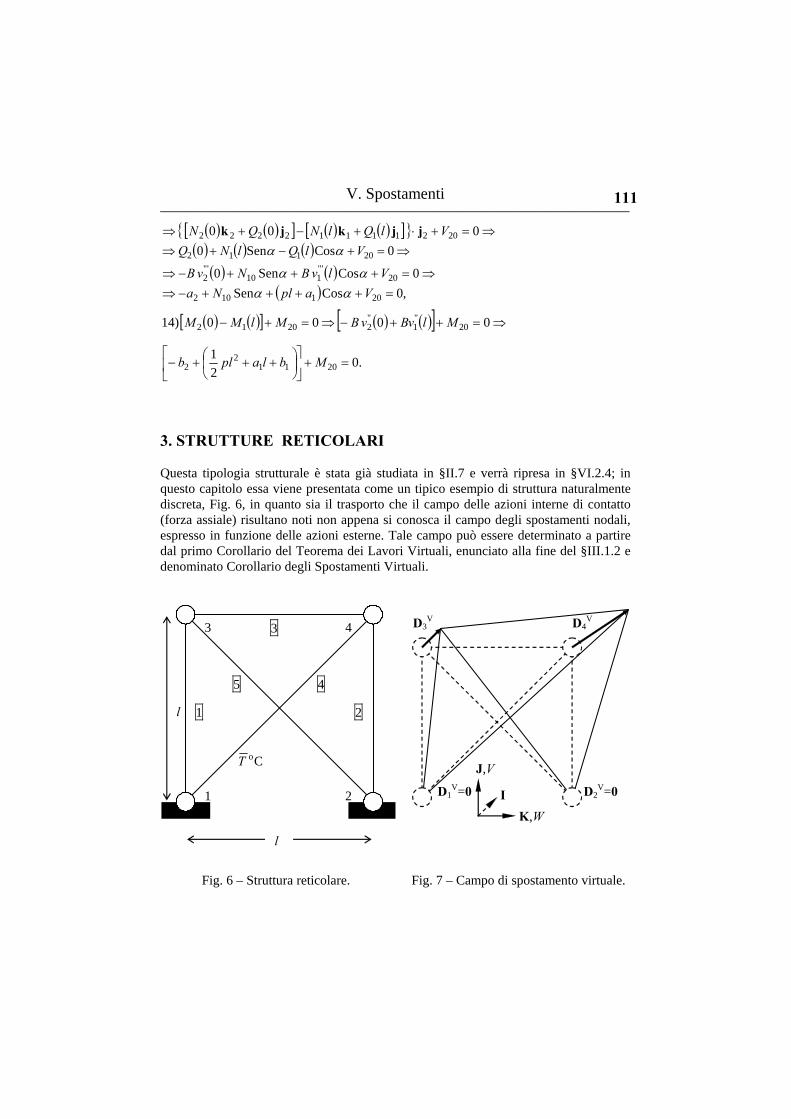
3. STRUTTURE RETICOLARI Questa tipologia strutturale è stata già studiata in §II.7 e verrà ripresa in §VI.2.4; in questo capitolo essa viene presentata come un tipico esempio di struttura naturalmente discreta, Fig. 6, in quanto sia il trasporto che il campo delle azioni interne di contatto (forza assiale) risultano noti non appena si conosca il campo degli spostamenti nodali, espresso in funzione delle azioni esterne. Tale campo può essere determinato a partire dal primo Corollario del Teorema dei Lavori Virtuali, enunciato alla fine del §III.1.2 e denominato Corollario degli Spostamenti Virtuali.
3
CoT
2
5
l
1
4
3
2 1
4
l
I D2V=0 D1
V=0
J,V
K,W
D4V D3
V
Fig. 6 – Struttura reticolare. Fig. 7 – Campo di spostamento virtuale.

Meccanica della Trave ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Ugo A. Andreaus - SCIENZA DELLE COSTRUZIONI • Progetto Leonardo - Editrice Esculapio - Bologna
112
Si assegni un campo di spostamento virtuale caratterizzato dagli “N” spostamenti nodali Dh
V (h=1,2,…,N), Fig. 7; si assuma anche una base “globale” KJI; per l’asta “k-esima” l’equazione differenziale di congruenza relativa alla deformazione estensionale Eq. (1.1)1 si scrive in termini finiti, App. 3: ( ) M,,...,2,1k,
k
Vi
VfV
k =⎥⎥⎦
⎤
⎢⎢⎣
⎡ ⋅−=
laDDε
(1)
avendo indicato con V
fVi kk
, DD gli spostamenti dei nodi rispettivamente iniziale (i) e fina-
le (f) dell’asta stessa, con ak il versore dell’asta orientato dal nodo iniziale verso quello finale, e con “M” il numero delle aste; è stata inoltre assunta l’uniformità della defor-mazione estensionale lungo l'asta. La deformazione ε k
V assume pertanto il ruolo di deformazione estensionale virtuale congruente con il campo di spostamento assegnato Dh
V. Indicando con Ak la rigidezza estensionale e con α k il coefficiente di dilatazio-
ne termica dell’asta “k-esima”, la risposta del materiale consente di legare la forza as-siale effettiva alla deformazione effettiva totale nell’asta “k-esima”, Eq. (1.3)1: ( ) ( )[ ] ,k
ET
Ekk
k
Ek
tkmkETk TANT
AN αεαεεε −=⇒+=+=
(2)
e l’equazione di congruenza estensionale permette di esprimere la deformazione effetti-va totale della “k-esima” asta in funzione degli spostamenti effettivi totali dei nodi “fi-nale” e “iniziale” alle estremità dell’asta medesima, di lunghezza lk: ( ) ,
k
ETi
ETfE
Tk⎥⎥⎦
⎤
⎢⎢⎣
⎡ ⋅−=
laDDε
(3)
anche in questo caso è stata assunta l’uniformità della deformazione estensionale lungo l’asta.
Pertanto, il lavoro virtuale interno speso dalla forza assiale effettiva nella de-formazione virtuale in tutta la struttura si ottiene sommando i contributi provenienti dalle singole aste: ( ) ==⎟
⎠⎞
⎜⎝⎛= ∑ ∑∫
= =
M
1k
M
1kk
VE
k0
VEVint lNdzNL
lεε

V. Spostamenti ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
113
( ) ( ) ,M
1kk
Vi
Vf
t
ETi
ETf∑
= ⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎥⎦
⎤
⎢⎢⎣
⎡ ⋅−
⎥⎥⎦
⎤
⎢⎢⎣
⎡−
⋅− lll
A aDDaDD ε
(4)
avendo tenuto conto che la forza assiale effettiva è costante in ogni asta, Eq. (2).
Il lavoro virtuale esterno è dato invece da:
,N
1h
Vh
Eh
Vest ∑
=
⋅= DFL
(5)
avendo tralasciato per semplicità di esposizione i contributi dei vincoli mobili ed elasti-ci, e dove Fh
E rappresenta la forza singolare a distanza effettiva agente nel generico nodo “h-esimo”. Con riferimento alla struttura di Fig. 6, nella quale sono assenti azioni mecca-niche esterne ( )0V
est =⇒ L e dove è presente soltanto una deformazione (anelastica) di
natura termica di intensità costante 0Cot >= Tαε nell’asta n° 4, l’uguaglianza dei
lavori virtuali interno ed esterno, Eqq. (4) e (5), comporta che:
( ) ( )[ ] +⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⋅+⎥⎥⎦
⎤
⎢⎢⎣
⎡ ⋅+= JJKJJK V
3V
3
E3
E3V
int VWlVWAL
( ) ( )[ ] +⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⋅+⎥⎥⎦
⎤
⎢⎢⎣
⎡ ⋅++ JJKJJK V
4V
4
E4
E4 VW
lVWA
( ) ( )[ ] ( ) ( )[ ] +⋅+−+⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧ ⋅+−+
+ KJKJKKJKJK V3
V3
V4
V4
E3
E3
E4
E4 VWVW
lVWVWA
( ) ( )( ) ( ) +
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎥⎥⎦
⎤
⎢⎢⎣
⎡+⋅+
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−+⋅+
+22
222
V4
V4
E4
E4
JKJKJKJK
VWTl
VWA α
( ) ( )( ) ( ) 0
22
222
V3
V3
E3
E3
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎥⎥⎦
⎤
⎢⎢⎣
⎡+−⋅+
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡+−⋅+
+ JKJKJKJK
VWl
VWA
(6)
Sviluppando i prodotti nell’Eq. (6) si ottiene:

Meccanica della Trave ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Ugo A. Andreaus - SCIENZA DELLE COSTRUZIONI • Progetto Leonardo - Editrice Esculapio - Bologna
114
+⎥⎥⎦
⎤
⎢⎢⎣
⎡−−⎟
⎟⎠
⎞⎜⎜⎝
⎛+ V
3E
4E
3E
3 42
421 WWVW
+⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛++−+ V
3E
3E
3 421
42 VVW
+⎥⎥⎦
⎤
⎢⎢⎣
⎡−+⎟
⎟⎠
⎞⎜⎜⎝
⎛++−+ V
4E
4E
4E
3 22
42
421 WlTVWW α
,0
22
421
42 V
4E
4E
4 =⎥⎥⎦
⎤
⎢⎢⎣
⎡−⎟
⎟⎠
⎞⎜⎜⎝
⎛+++ VlTVW α
(7)
avendo per snellezza di calcolo assunto una rigidezza estensionale A uguale per tutte le aste.
Poiché il 1° membro dell’Eq. (7) deve annullarsi per qualunque valore delle componenti di spostamento virtuale W3
V, V3V, W4
V, V4V, devono indipendentemente
annullarsi i singoli coefficienti delle suddette componenti, cioè
,0
42
421 E
4E
3E
3 =−−⎟⎟⎠
⎞⎜⎜⎝
⎛+ WVW
(8a)
,0
421
42 E
3E
3 =⎟⎟⎠
⎞⎜⎜⎝
⎛++− VW
(8b)
,0
22
42
421 E
4E
4E
3 =−+⎟⎟⎠
⎞⎜⎜⎝
⎛++− lTVWW α
(8c)
.0
22
421
42 E
4E
4 =−⎟⎟⎠
⎞⎜⎜⎝
⎛++ lTVW α
(8d)
Le Eqq. (8) hanno il significato di equazioni scalari di equilibrio delle forze per i nodi “liberi”, cioè non vincolati; le incognite sono costituite dalle componenti di spostamen-to di detti nodi. Per meglio comprendere questa interpretazione meccanica delle Eqq. (8), è utile richiamare l’analogia tra l’asta incernierata alle estremità, di lunghezza l e rigidezza assiale A, e la molla estensionale, di costante elastica Ke=A/l, introdotta in App. 3. A seguito degli spostamenti nodali, le aste subiscono variazioni di lunghezza, proporzionali alle differenze degli spostamenti dei nodi di estremità delle aste medesi-me, App. 3; le aste esercitano quindi sui nodi forze di richiamo elastico, proporzionali agli spostamenti nodali. Su ciascun nodo risultano allora in generale applicate sia forze

V. Spostamenti ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
115
interne dovute alle aste convergenti nel nodo medesimo sia forze esterne, l’equilibrio tra le quali è garantito proprio dalle Eqq. (8), App. 4.
Le Eqq. (8) possono essere per comodità riscritte in forma matriciale:
.
0000
22
2200
421
4200
42
42101
00421
42
0142
421
E4
E4
E3
E3
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
−
−+
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛+
⎟⎟⎠
⎞⎜⎜⎝
⎛+−
⎟⎟⎠
⎞⎜⎜⎝
⎛+−
−−⎟⎟⎠
⎞⎜⎜⎝
⎛+
lT
lT
VWVW
α
α
(9)
La matrice dei coefficienti delle Eqq. (9) è detta matrice di rigidezza della struttura. Essa è quadrata, simmetrica e non-singolare; la soluzione del sistema di equazioni alge-briche lineari Eqq. (9) fornisce i valori delle componenti di spostamento W3
E, V3 E, W4
E, V4
E, che definiscono il trasporto effettivo della struttura in esame, Fig. 8:
,230.0,114.1,230.0,884.0 E4
E4
E3
E3 lTVlTWlTVlTW αααα ====
Le Eqq. (2) e (3) permettono poi di risalire agevolmente alle forze assiali agenti nelle singole aste, Fig. 9:
,k
ETi
ETfE
k⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎥⎦
⎤
⎢⎢⎣
⎡−⋅⎟
⎟⎠
⎞⎜⎜⎝
⎛ −= T
lAN αaDD
( ) ,230.0,230.0,230.0 E
3E
4E3
E4
E2
E3
E1 ATlWWANATlAVNATlAVN ααα =−=====
( ) ( ) .327.022
2,327.022
2 E3
E3E
5
E4
E4E
4 ATlWVANATT
lVWAN ααα −=
−=−=
⎥⎥⎦
⎤
⎢⎢⎣
⎡−
+=
Meccanica della Trave ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Ugo A. Andreaus - SCIENZA DELLE COSTRUZIONI • Progetto Leonardo - Editrice Esculapio - Bologna
116
D4ED3
E
0.230α TA0.23
0 αTA
ATα230.0
ATα327.0−
ATα327.0−
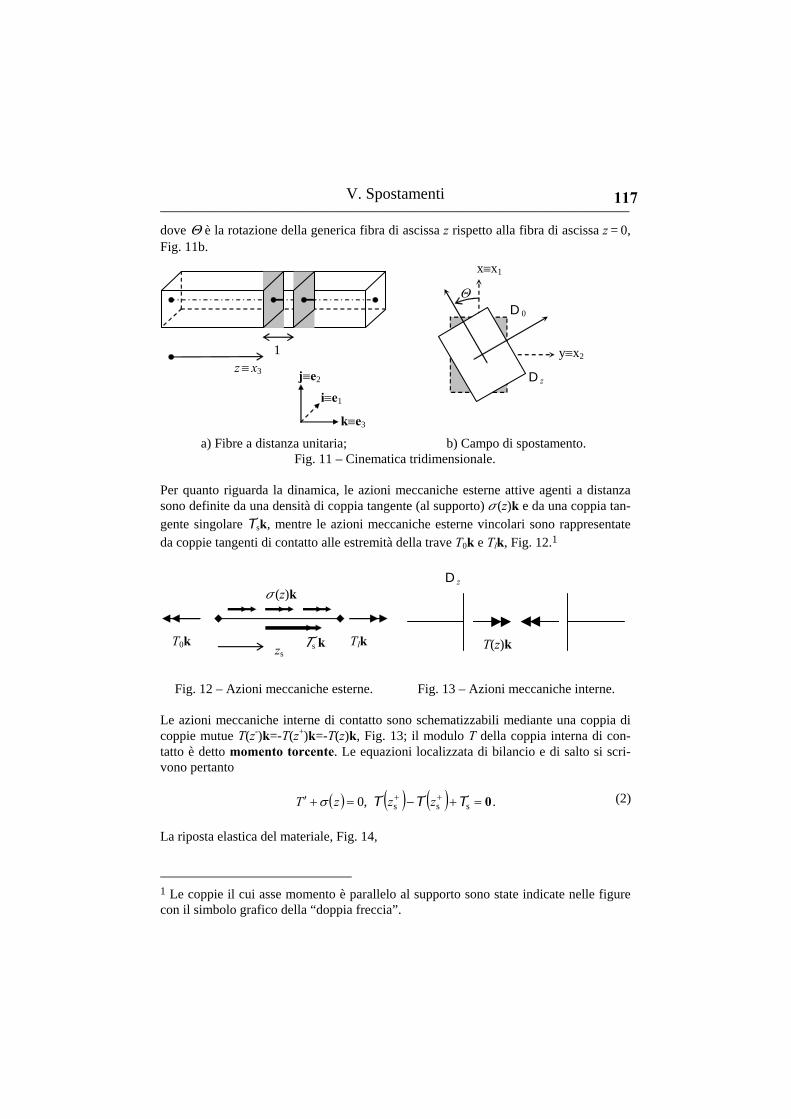
Fig. 8 – Campo di spostamento effettivo. Fig. 9 – Campo della forza assiale. In §VI.2.4, il problema appena affrontato sarà risolto applicando il Metodo delle Coa-zioni: si potrà allora constatare la coincidenza della soluzione con quella testé ottenuta in questa sede mediante il Metodo degli Spostamenti, fissando ad esempio l’attenzione sul valore della forza assiale nell’asta n° 5. 5. TRAVE IN AMBIENTE TRIDIMENSIONALE
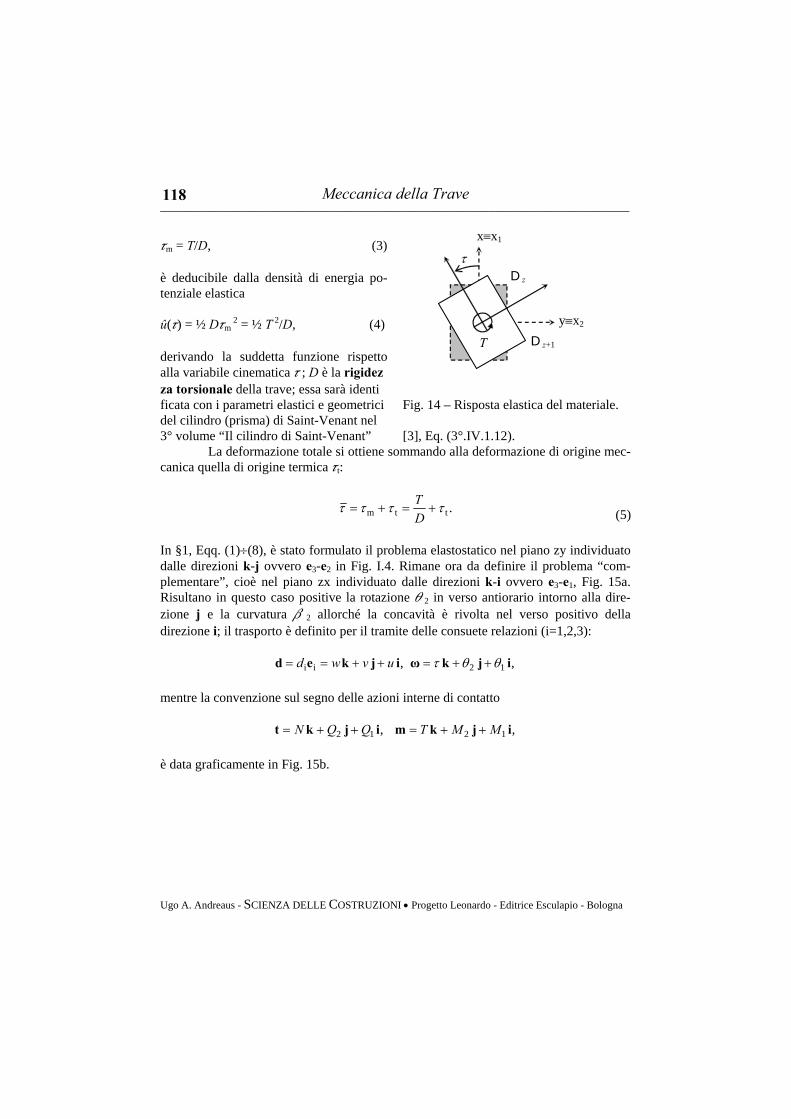
5.1 Generalità La trattazione svolta nei paragrafi precedenti relativamente alla trave in ambiente bidi-mensionale può essere immediatamente estesa alla trave immersa in un ambiente tridi-mensionale. Per quanto attiene alla cinematica, il campo del “piccolo” spostamento dτ è contenuto nel piano ij ovvero e1e2 ed è definito attraverso la torsione τ, cioè la rotazione relativa tra due fibre a distanza unitaria intorno all’asse z ≡ x3, Fig. 11a: dτ (x,y) = Θ x j - Θ y i, Θ = τ z, τ = Θ ’ = costz, (1)
V. Spostamenti ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
117
dove Θ è la rotazione della generica fibra di ascissa z rispetto alla fibra di ascissa z = 0, Fig. 11b.
z ≡ x3 1
j≡e2
k≡e3
i≡e1
y≡x2
x≡x1
D 0
D z
Θ
a) Fibre a distanza unitaria; b) Campo di spostamento. Fig. 11 – Cinematica tridimensionale.
Per quanto riguarda la dinamica, le azioni meccaniche esterne attive agenti a distanza sono definite da una densità di coppia tangente (al supporto) σ (z)k e da una coppia tan-gente singolare Tsk, mentre le azioni meccaniche esterne vincolari sono rappresentate da coppie tangenti di contatto alle estremità della trave T0k e Tlk, Fig. 12.1
zs Ts k
σ (z)k
T0k Tlk
D z
T(z)k
Fig. 12 – Azioni meccaniche esterne. Fig. 13 – Azioni meccaniche interne. Le azioni meccaniche interne di contatto sono schematizzabili mediante una coppia di coppie mutue T(z-)k=-T(z+)k=-T(z)k, Fig. 13; il modulo T della coppia interna di con-tatto è detto momento torcente. Le equazioni localizzata di bilancio e di salto si scri-vono pertanto ( ) ( ) ( ) .,0 sss 0=+−=+′ ++ TTT zzzT σ (2)
La riposta elastica del materiale, Fig. 14,
1 Le coppie il cui asse momento è parallelo al supporto sono state indicate nelle figure con il simbolo grafico della “doppia freccia”.
Meccanica della Trave ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Ugo A. Andreaus - SCIENZA DELLE COSTRUZIONI • Progetto Leonardo - Editrice Esculapio - Bologna
118
τm = T/D, (3) è deducibile dalla densità di energia po-tenziale elastica û(τ) = ½ Dτm
2 = ½ T 2/D, (4)
derivando la suddetta funzione rispetto alla variabile cinematica τ ; D è la rigidez za torsionale della trave; essa sarà identi
y≡x2
x≡x1
D z
D z+1
τ
T
ficata con i parametri elastici e geometrici Fig. 14 – Risposta elastica del materiale. del cilindro (prisma) di Saint-Venant nel 3° volume “Il cilindro di Saint-Venant” [3], Eq. (3°.IV.1.12).
La deformazione totale si ottiene sommando alla deformazione di origine mec-canica quella di origine termica τt:
.ttm ττττ +=+=
DT
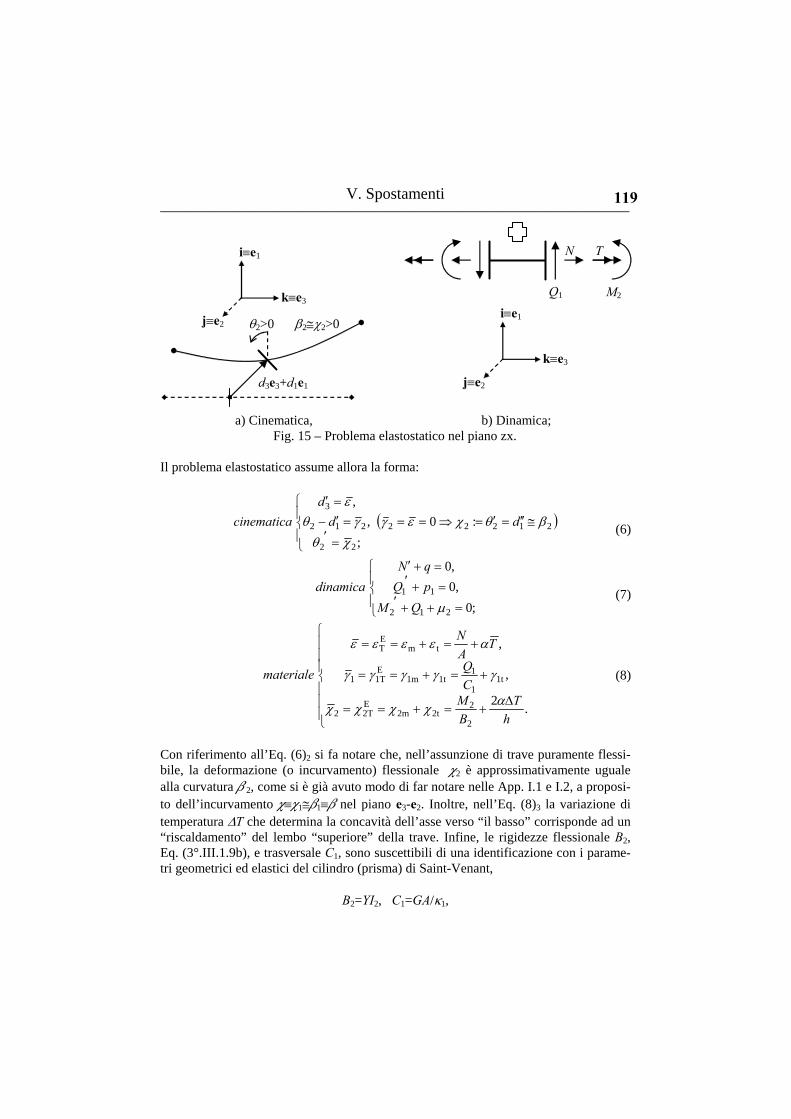
(5) In §1, Eqq. (1)÷(8), è stato formulato il problema elastostatico nel piano zy individuato dalle direzioni k-j ovvero e3-e2 in Fig. I.4. Rimane ora da definire il problema “com-plementare”, cioè nel piano zx individuato dalle direzioni k-i ovvero e3-e1, Fig. 15a. Risultano in questo caso positive la rotazione θ 2 in verso antiorario intorno alla dire-zione j e la curvatura β 2 allorché la concavità è rivolta nel verso positivo della direzione i; il trasporto è definito per il tramite delle consuete relazioni (i=1,2,3):
,, 12ii ijkωijked θθτ ++=++== uvwd mentre la convenzione sul segno delle azioni interne di contatto
,, 1212 ijkmijkt MMTQQN ++=++= è data graficamente in Fig. 15b.
V. Spostamenti ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
119
d3e3+d1e1
β2≅χ2>0θ2>0
k≡e3
i≡e1
j≡e2
T
Q1 M2
N
k≡e3
i≡e1
j≡e2
a) Cinematica, b) Dinamica;
Fig. 15 – Problema elastostatico nel piano zx. Il problema elastostatico assume allora la forma:
( )21222
22
212
3
:0;
,,
βθχεγχθ
γθε
≅′′=′=⇒==⎪⎩
⎪⎨
⎧
=′=′−
=′
ddd
cinematica
(6)
⎪⎩
⎪⎨
⎧
=++′=+′
=+′
;0,0
,0
212
11
µQMpQqN
dinamica
(7)
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
∆+=+==
+=+==
+=+==
.2
,
,
2
22t2m
E2T2
1t1
11t1m
E1T1
tmET
hT
BMCQ
TAN
materiale
αχχχχ
γγγγγ
αεεεε
(8)
Con riferimento all’Eq. (6)2 si fa notare che, nell’assunzione di trave puramente flessi-bile, la deformazione (o incurvamento) flessionale χ2 è approssimativamente uguale alla curvatura β 2, come si è già avuto modo di far notare nelle App. I.1 e I.2, a proposi-to dell’incurvamento χ≡χ1≅β1≡β nel piano e3-e2. Inoltre, nell’Eq. (8)3 la variazione di temperatura ∆T che determina la concavità dell’asse verso “il basso” corrisponde ad un “riscaldamento” del lembo “superiore” della trave. Infine, le rigidezze flessionale B2, Eq. (3°.III.1.9b), e trasversale C1, sono suscettibili di una identificazione con i parame-tri geometrici ed elastici del cilindro (prisma) di Saint-Venant,
B2=YI2, C1=GA/κ1,
Meccanica della Trave ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Ugo A. Andreaus - SCIENZA DELLE COSTRUZIONI • Progetto Leonardo - Editrice Esculapio - Bologna
120
in maniera del tutto analoga a quella usata per B≡B1 nell’App. 3°.III.3 e per C≡C2 con l’Eq. (3°.V.1.18) e nell’App. 3°.V.2 [3]; Y è il modulo di Young (§2°.IV.4.4) e G è il modulo di rigidezza trasversale del materiale (§2°.IV.4.2) [2], A è l’area della sezione retta della trave e I2 è il momento d’inerzia intorno all’asse x2 (App. 3°.I.1 [3]), il para-metro κ1 è definito “fattore di taglio” lungo l’asse x1, App. 3°.V.2 [3].
qa
qb
F1 F3
F2
E3
E1
E2
D(qb)=0
D(qa)=0, Ω (D a)=0
qa
M2
M3
M1
F2 F1
F3
qb E3
E1
E2
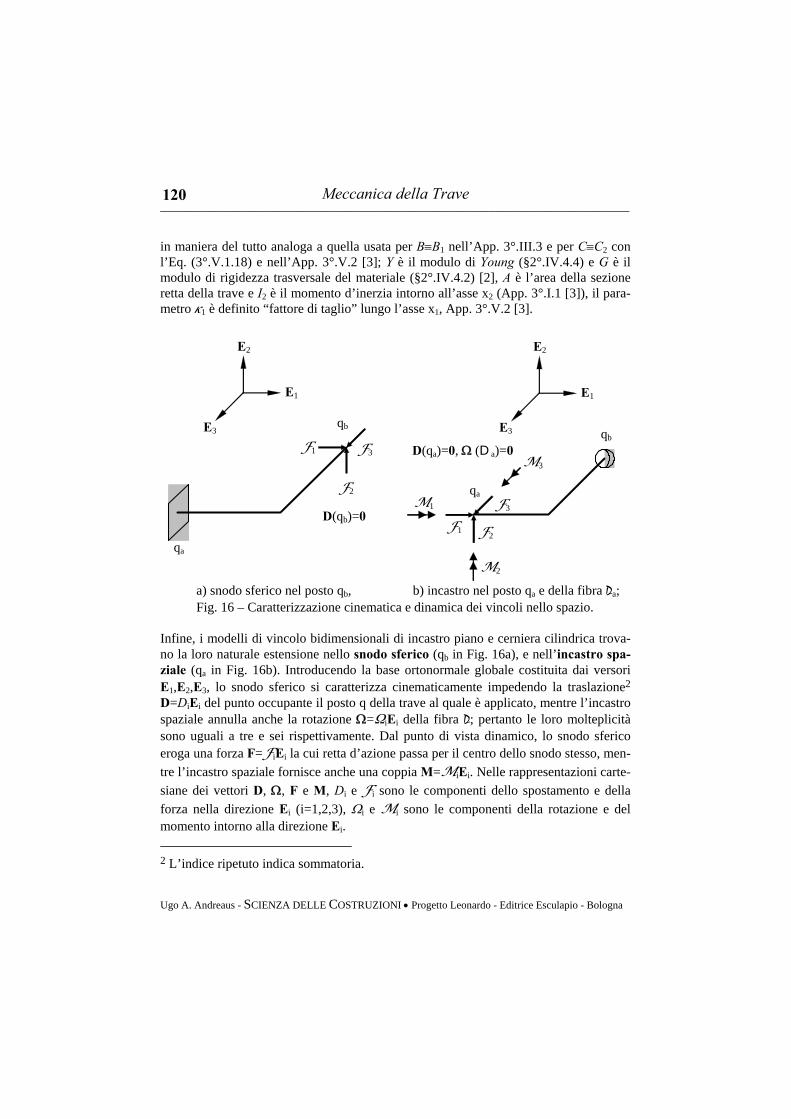
a) snodo sferico nel posto qb, b) incastro nel posto qa e della fibra Da; Fig. 16 – Caratterizzazione cinematica e dinamica dei vincoli nello spazio.
Infine, i modelli di vincolo bidimensionali di incastro piano e cerniera cilindrica trova-no la loro naturale estensione nello snodo sferico (qb in Fig. 16a), e nell’incastro spa-ziale (qa in Fig. 16b). Introducendo la base ortonormale globale costituita dai versori E1,E2,E3, lo snodo sferico si caratterizza cinematicamente impedendo la traslazione2 D=DiEi del punto occupante il posto q della trave al quale è applicato, mentre l’incastro spaziale annulla anche la rotazione Ω=ΩiEi della fibra D; pertanto le loro molteplicità sono uguali a tre e sei rispettivamente. Dal punto di vista dinamico, lo snodo sferico eroga una forza F=FiEi la cui retta d’azione passa per il centro dello snodo stesso, men-tre l’incastro spaziale fornisce anche una coppia M=MiEi. Nelle rappresentazioni carte-siane dei vettori D, Ω, F e M, Di e Fi sono le componenti dello spostamento e della forza nella direzione Ei (i=1,2,3), Ωi e Mi sono le componenti della rotazione e del momento intorno alla direzione Ei. 2 L’indice ripetuto indica sommatoria.
V. Spostamenti ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
121
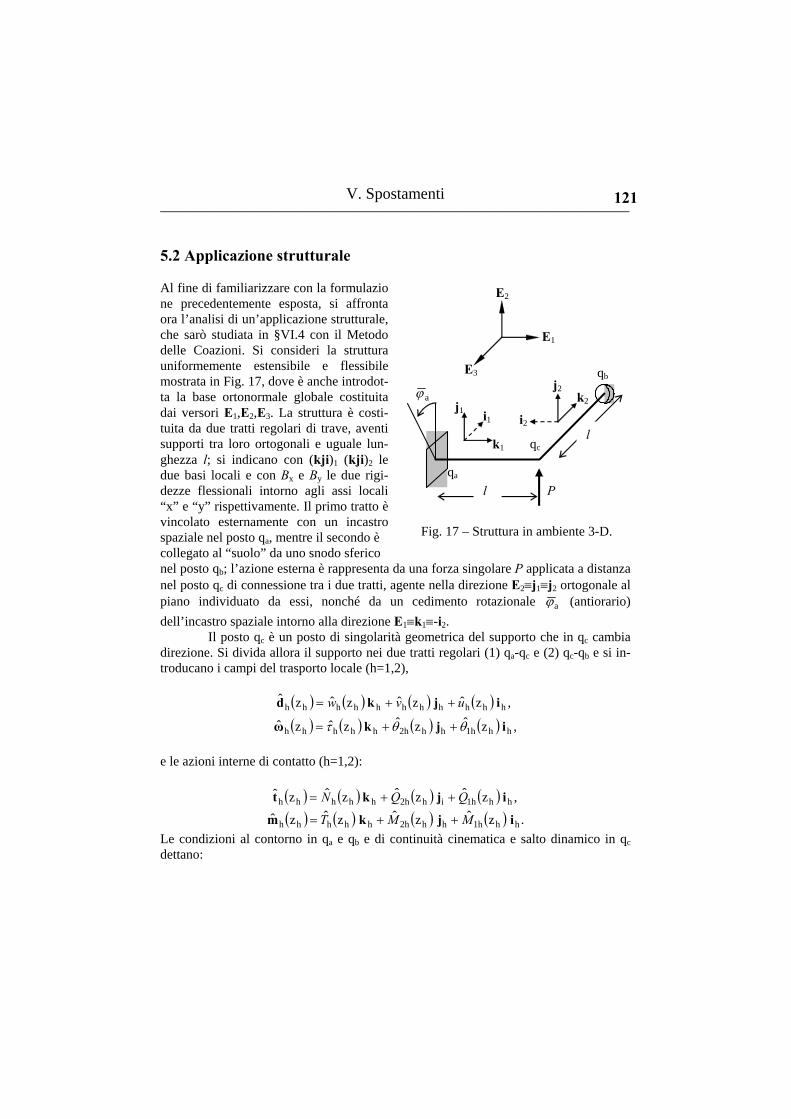
5.2 Applicazione strutturale Al fine di familiarizzare con la formulazio ne precedentemente esposta, si affronta ora l’analisi di un’applicazione strutturale, che sarò studiata in §VI.4 con il Metodo delle Coazioni. Si consideri la struttura uniformemente estensibile e flessibile mostrata in Fig. 17, dove è anche introdot-ta la base ortonormale globale costituita dai versori E1,E2,E3. La struttura è costi-tuita da due tratti regolari di trave, aventi supporti tra loro ortogonali e uguale lun-ghezza l; si indicano con (kji)1 (kji)2 le due basi locali e con Bx e By le due rigi-dezze flessionali intorno agli assi locali “x” e “y” rispettivamente. Il primo tratto è vincolato esternamente con un incastro spaziale nel posto qa, mentre il secondo è collegato al “suolo” da uno snodo sferico
qc
qb
qa
P
aϕ
E3
E1
E2
k1
j1 i1 k2
j2
i2
l
l
Fig. 17 – Struttura in ambiente 3-D.
nel posto qb; l’azione esterna è rappresenta da una forza singolare P applicata a distanza nel posto qc di connessione tra i due tratti, agente nella direzione E2≡j1≡j2 ortogonale al piano individuato da essi, nonché da un cedimento rotazionale aϕ (antiorario) dell’incastro spaziale intorno alla direzione E1≡k1≡-i2.
Il posto qc è un posto di singolarità geometrica del supporto che in qc cambia direzione. Si divida allora il supporto nei due tratti regolari (1) qa-qc e (2) qc-qb e si in-troducano i campi del trasporto locale (h=1,2),
( ) ( ) ( ) ( ) ,zˆzˆzˆzˆhhhhhhhhhhh ijkd uvw ++=
( ) ( ) ( ) ( ) ,zˆzˆzˆzˆ hh1hhh2hhhhhh ijkω θθτ ++= e le azioni interne di contatto (h=1,2):
( ) ( ) ( ) ( ) ,zˆzˆzˆzˆhh1hih2hhhhhh ijkt QQN ++=
( ) ( ) ( ) ( ) .zˆzˆzˆzˆ hh1hhh2hhhhhh ijkm MMT ++= Le condizioni al contorno in qa e qb e di continuità cinematica e salto dinamico in qc dettano:

Meccanica della Trave ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Ugo A. Andreaus - SCIENZA DELLE COSTRUZIONI • Progetto Leonardo - Editrice Esculapio - Bologna
122
( ) ( ) ( ) ( )( ) ( ) ( )⎪⎩
⎪⎨⎧
======⇒=
;00ˆ0ˆ,0ˆ)6),5),4,00ˆ0ˆ0ˆ)3),2),10ˆ
:q121
1111a θθϕτ a
uvw0d
( ) ( ) ( ) ( )( ) ( ) ( ) ( )⎪⎩
⎪⎨⎧
===⇒====⇒=
;00ˆ0ˆ0ˆ)12),11),100ˆ,0ˆˆˆ)9),8),7ˆ
:q1222
2222b MMT
lulvlwl0m
0d
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )[ ] ( ) ( ) ( )[ ]
( ) ( )( ) ( ) ( )[ ] ( ) ( ) ( )[ ]⎪
⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=++−++
⇒=−=+++−++
⇒=+−++=++⇒=
++=++⇒=
.0ˆ0ˆ0ˆ0ˆ0ˆ0ˆ)24),23),22
ˆ0ˆ,0ˆ0ˆ0ˆ0ˆ0ˆ0ˆ)21),20),19
ˆ0ˆ;ˆ0ˆ0ˆ0ˆ)18),17),16ˆ0ˆ
,ˆˆˆ0ˆ0ˆ0ˆ)15),14),13ˆ0ˆ
:q
1111211121222222
12
21111211121222222
212
111121112122222212
12111122222212
c
0ijkijk
0mm0Eijkijk
0Ettijkijkωω
ijkijkdd
MMTMMT
lPQQNQQN
Plllll
lulvlwuvwlθθτθθτ
Per lo “h-esimo” tratto regolare il trasporto assume la forma:
( ) ,ˆ0 h0h1hhh ττσ czczΘ +=⇒≡ ,, h2h1hh1h2h uCvC ′=⇒∞→′−=⇒∞→ θθ
,0 0h1hhh ww czcwq +=⇒≡
,21
610 0h1h
22h
33hhh2 vvvv czczczcvp +++=⇒≡
.21
610 0h1h
22h
33hhh1 uuuu czczczcup +++=⇒≡
Inoltre, tra le azioni di contatto e le deformazioni sussistono le seguenti relazioni:
.,,,,, h22hh11hhhhh21hh12hhh uBMvBMDTuBQvBQwAN ′′=′′−==′′′−=′′′−=′= τ Infine, i versori delle basi locali sono legati ai versori della base globale dalle semplici relazioni:
k1=E1, j1=E2, i1=-E3, k2=-E3, j2=E2, i2=-E1. Le 24 equazioni che impongono il rispetto delle condizioni al contorno e di “cucitura” consentono allora di determinare le 24 costanti incognite (h=1,2): cw0h, cw1h, cv0h, cv1h, cv2h, cv3h, cu0h, cu1h, cu2h, cu3h, cτ0h, cτ1h.
V. Spostamenti ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
123
Appendice 1: CONDIZIONI al CONTORNO per VINCOLI ELA- STICAMENTE CEDEVOLI
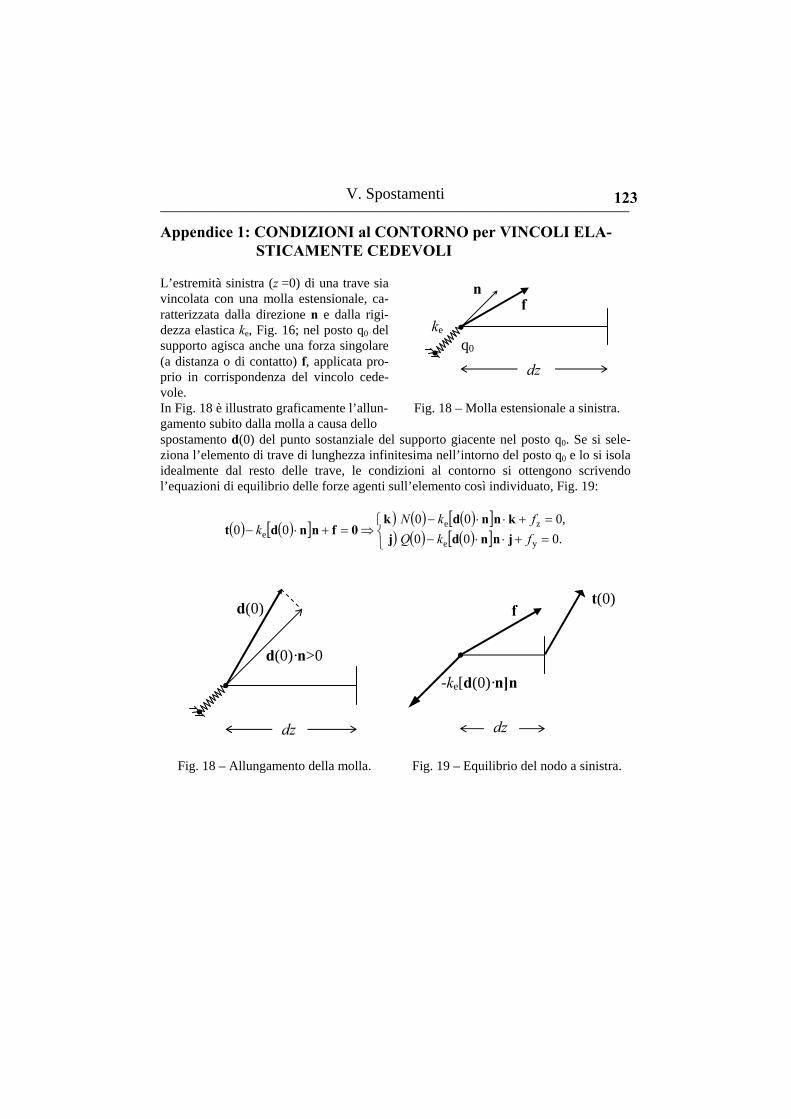
L’estremità sinistra (z =0) di una trave sia vincolata con una molla estensionale, ca-ratterizzata dalla direzione n e dalla rigi-dezza elastica ke, Fig. 16; nel posto q0 del supporto agisca anche una forza singolare (a distanza o di contatto) f, applicata pro-prio in corrispondenza del vincolo cede-vole.
ke q0
n
dz
f
In Fig. 18 è illustrato graficamente l’allun- Fig. 18 – Molla estensionale a sinistra. gamento subito dalla molla a causa dello spostamento d(0) del punto sostanziale del supporto giacente nel posto q0. Se si sele-ziona l’elemento di trave di lunghezza infinitesima nell’intorno del posto q0 e lo si isola idealmente dal resto delle trave, le condizioni al contorno si ottengono scrivendo l’equazioni di equilibrio delle forze agenti sull’elemento così individuato, Fig. 19:
( ) ( )[ ] ) ( ) ( )[ ]) ( ) ( )[ ]⎩
⎨⎧
=+⋅⋅−=+⋅⋅−
⇒=+⋅−.000,000
00ye
zee fkQ
fkNk
jnndjknndk
0fnndt
d(0)·n>0
d(0)
dz
-ke[d(0)·n]n
f t(0)
dz
Fig. 18 – Allungamento della molla. Fig. 19 – Equilibrio del nodo a sinistra.
Meccanica della Trave ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Ugo A. Andreaus - SCIENZA DELLE COSTRUZIONI • Progetto Leonardo - Editrice Esculapio - Bologna
124
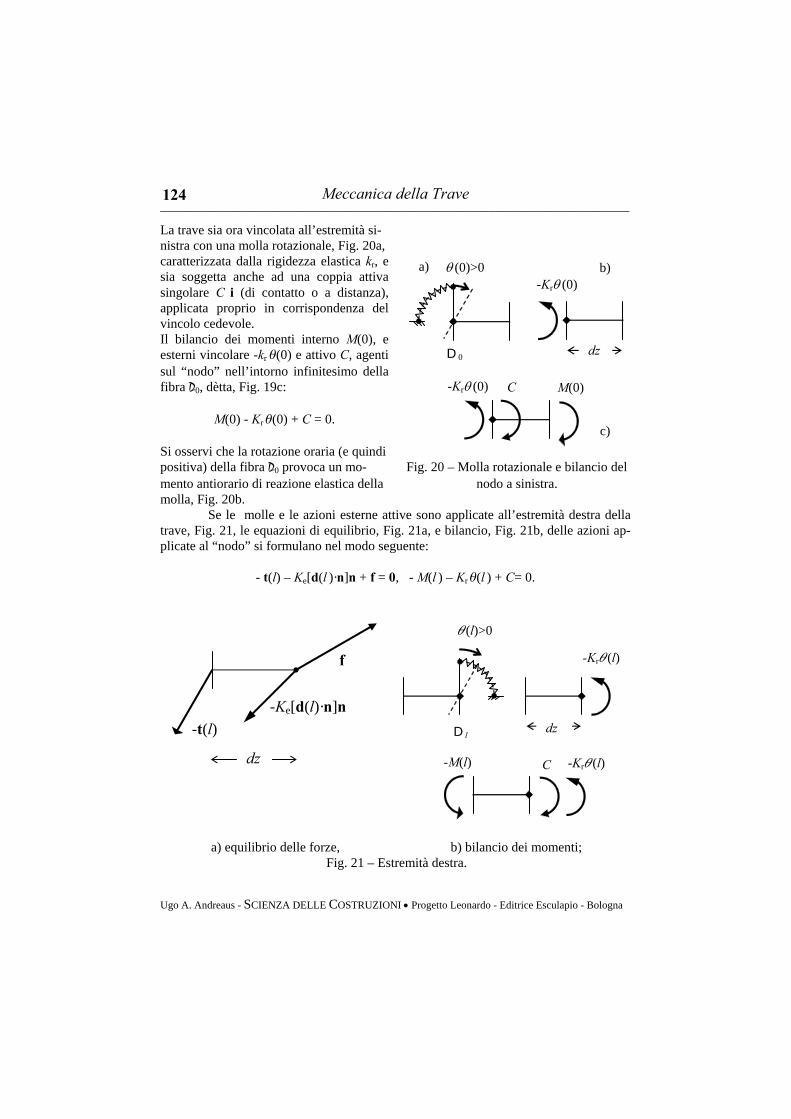
La trave sia ora vincolata all’estremità si- nistra con una molla rotazionale, Fig. 20a, caratterizzata dalla rigidezza elastica kr, e sia soggetta anche ad una coppia attiva singolare C i (di contatto o a distanza), applicata proprio in corrispondenza del vincolo cedevole. Il bilancio dei momenti interno M(0), e esterni vincolare -kr θ(0) e attivo C, agenti sul “nodo” nell’intorno infinitesimo della fibra D0, dètta, Fig. 19c:
M(0) - Kr θ(0) + C = 0. Si osservi che la rotazione oraria (e quindi
D 0
-Krθ (0) θ (0)>0
-Krθ (0) C M(0)
dz
b)
c)
a)
positiva) della fibra D0 provoca un mo- Fig. 20 – Molla rotazionale e bilancio del mento antiorario di reazione elastica della nodo a sinistra. molla, Fig. 20b.
Se le molle e le azioni esterne attive sono applicate all’estremità destra della trave, Fig. 21, le equazioni di equilibrio, Fig. 21a, e bilancio, Fig. 21b, delle azioni ap-plicate al “nodo” si formulano nel modo seguente:
- t(l) – Ke[d(l )·n]n + f = 0, - M(l ) – Kr θ(l ) + C= 0.
f
-Ke[d(l)·n]n-t(l)
dz
-Krθ (l) C
-Krθ (l)
θ (l)>0
-M(l)
D l dz
a) equilibrio delle forze, b) bilancio dei momenti;
Fig. 21 – Estremità destra.
V. Spostamenti ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
125
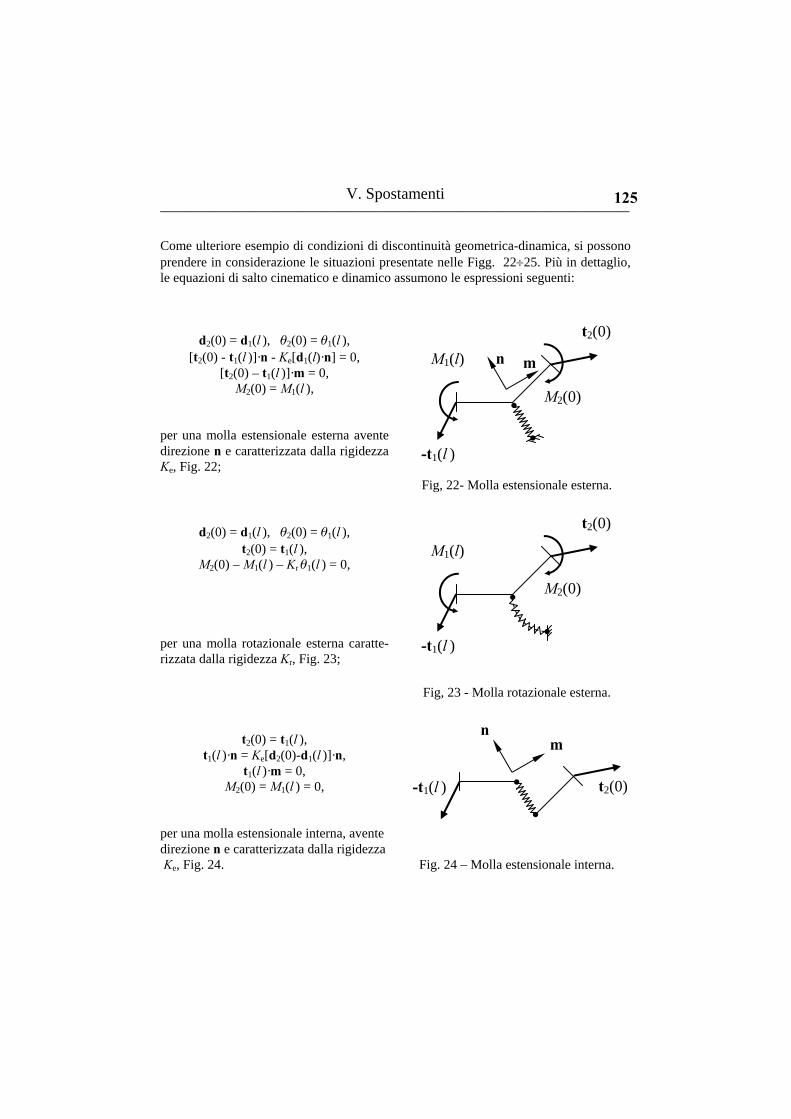
Come ulteriore esempio di condizioni di discontinuità geometrica-dinamica, si possono prendere in considerazione le situazioni presentate nelle Figg. 22÷25. Più in dettaglio, le equazioni di salto cinematico e dinamico assumono le espressioni seguenti:
d2(0) = d1(l ), θ2(0) = θ1(l ), [t2(0) - t1(l )]·n - Ke[d1(l)·n] = 0,
[t2(0) – t1(l )]·m = 0, M2(0) = M1(l ),
per una molla estensionale esterna avente direzione n e caratterizzata dalla rigidezza Ke, Fig. 22;
m n
M2(0)
M1(l)
t2(0)
-t1(l )
Fig, 22- Molla estensionale esterna.
d2(0) = d1(l ), θ2(0) = θ1(l ),
t2(0) = t1(l ), M2(0) – M1(l ) – Kr θ1(l ) = 0,
per una molla rotazionale esterna caratte-rizzata dalla rigidezza Kr, Fig. 23;
M2(0)
M1(l)
t2(0)
-t1(l )
Fig, 23 - Molla rotazionale esterna.
t2(0) = t1(l ),
t1(l )·n = Ke[d2(0)-d1(l )]·n, t1(l )·m = 0,
M2(0) = M1(l ) = 0, per una molla estensionale interna, avente
m
n
t2(0) -t1(l )
direzione n e caratterizzata dalla rigidezza Ke, Fig. 24. Fig. 24 – Molla estensionale interna.
Meccanica della Trave ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Ugo A. Andreaus - SCIENZA DELLE COSTRUZIONI • Progetto Leonardo - Editrice Esculapio - Bologna
126
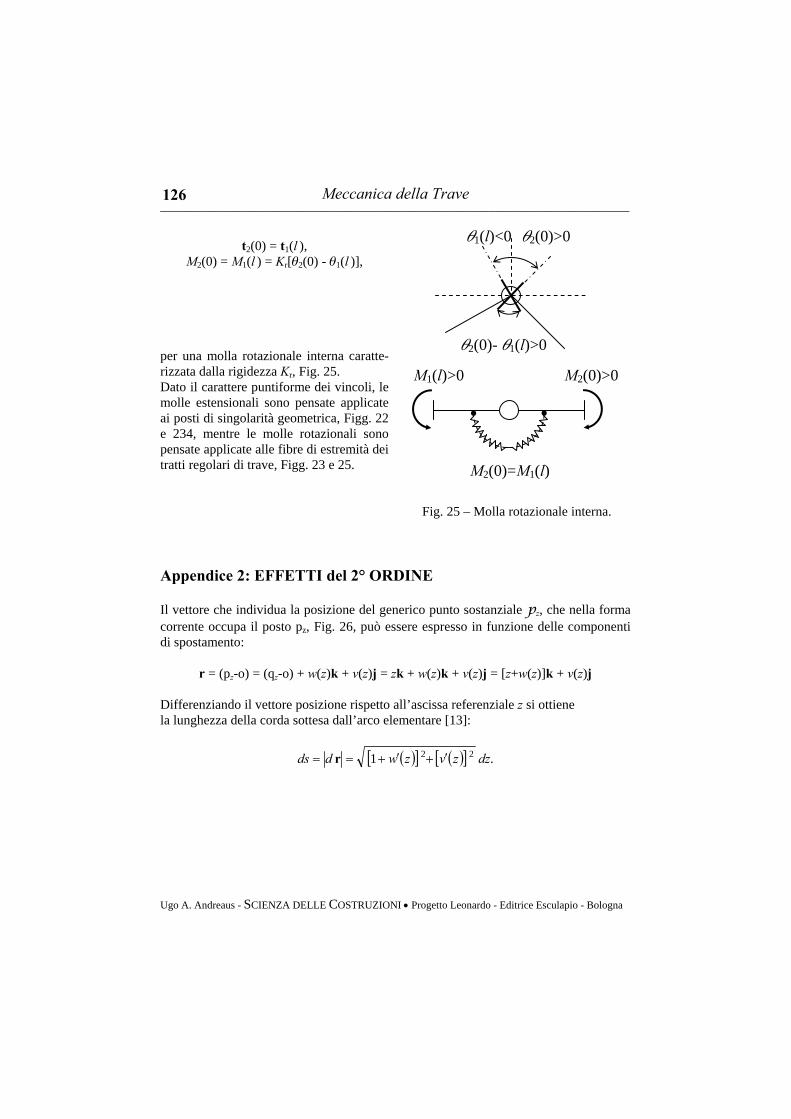
t2(0) = t1(l ),
M2(0) = M1(l ) = Kr[θ2(0) - θ1(l )],
per una molla rotazionale interna caratte-rizzata dalla rigidezza Kr, Fig. 25. Dato il carattere puntiforme dei vincoli, le molle estensionali sono pensate applicate ai posti di singolarità geometrica, Figg. 22 e 234, mentre le molle rotazionali sono pensate applicate alle fibre di estremità dei tratti regolari di trave, Figg. 23 e 25.
θ2(0)- θ1(l)>0
M1(l)>0 M2(0)>0
M2(0)=M1(l)
θ2(0)>0 θ1(l)<0
Fig. 25 – Molla rotazionale interna. Appendice 2: EFFETTI del 2° ORDINE Il vettore che individua la posizione del generico punto sostanziale pz, che nella forma corrente occupa il posto pz, Fig. 26, può essere espresso in funzione delle componenti di spostamento:
r = (pz-o) = (qz-o) + w(z)k + v(z)j = zk + w(z)k + v(z)j = [z+w(z)]k + v(z)j Differenziando il vettore posizione rispetto all’ascissa referenziale z si ottiene la lunghezza della corda sottesa dall’arco elementare [13]:
( )[ ] ( )[ ] .1 22 dzzvzwdds ′+′+== r

V. Spostamenti ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
127
Imponendo la condizione locale di inestensibilità della trave3, cioè l’uguaglianza della lunghezza degli elementi differenziali rettilineo referenziale dz (→0) e curvilineo (retti-ficato) attuale ds:
ds = dz, si ricava l’espressione di w’(z):
( )[ ] ( )[ ] ( )[ ] ( )[ ] ( )[ ] ( )[ ] ⇒′−=′+⇒=′+′+⇒=′+′+ 222222 111111 zvzwzvzwzvzw
( ) ( )[ ] ( ) ( )[ ] .1111 22 −′−=′⇒′−=′+⇒ zvzwzvzw
Nell’estrazione di radice si è convenuto di assumere il valore assoluto.
q0≡o
r d
pz
qz
pl
ql
(l-δ)
l
P δ
η
S r
S a
(l-δ)
l
Fig. 26 – Lunghezza dell’arco di curva. Fig. 27 – Dinamica nella forma attuale. Si consideri ora, ad esempio, il caso della mensola già studiata in §2.1 e nuovamente rappresentata in Fig. 27. La componente δ=w(l ) dello spostamento in direzione k del punto sostanziale pl è allora dato da [7]:
( ) ( ) ( ) ( )[ ] .1100
2
0 ∫∫ ⎭⎬⎫
⎩⎨⎧ −′−≅′+==
− lldzzvdzzwwlw
δδ
Sviluppando in serie di Mac Laurin [13] la radice e trascurando i termini d’ordine supe-riore al 1°, si ha [7]:
( )[ ] ,151
21 5
2
0
2 lBPdzzv
l⎟⎠⎞
⎜⎝⎛−=
⎭⎬⎫
⎩⎨⎧ ′−≅ ∫δ
3 La condizione di inestensibiltà è richiesta al fine di escludere eventuali deformazioni estensionali dovute alla componente assiale della forza esterna nella forma corrente.
Meccanica della Trave ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Ugo A. Andreaus - SCIENZA DELLE COSTRUZIONI • Progetto Leonardo - Editrice Esculapio - Bologna
128
avendo fatto uso dell’Eq. (2.6) e della condizione al contorno w(0)=0 in corrisponden-za dell’incastro; inoltre, l’intervallo d’integrazione [0,l-δ] è stato approssimato con [0,l] supponendo δ/l«1; infine, il segno “meno” sta ad indicare che si tratta di un accorcia-mento; infatti, l’incurvamento del supporto provoca un “arretramento” del punto so-stanziale pl nella già richiesta condizione di inestensibilità del supporto. Allo scopo si snellire gli sviluppi successivi si commetta ora un abuso di nota-zione ponendo δ =|w(l)|; si esprima poi δ in funzione della componente trasversale η =v(l), Eq. (2.7), dello spostamento del punto sostanziale pl, pervenendo alla seguente approssimazione:
;53 2
⎟⎠⎞
⎜⎝⎛≅
llηδ
dal momento che nelle più comuni applicazioni strutturali risulta
η /l ∼ 10-2÷10-3, si evince facilmente che
δ /l ∼ 10-4÷10-6. è minore di η /l per almeno 2 ordini di grandezza, e quindi trascurabile rispetto ad esso.
L’equazione di bilancio dei momenti (rispetto al polo o≡q0) - scritta nella for-ma attuale - dipende dal modulo δ della componente “orizzontale” w(l)=(pl-ql)·k dello spostamento del punto sostanziale pl all’estremo libero della trave, che “si avvicina” all’incastro, Fig. 27,
M0a = - P (l-δ),
Dal momento che - come già notato - δ è trascurabile rispetto ad η, si può - con suffi-ciente approssimazione - calcolare il momento d’incastro come
M0r = - Pl ≅ M0
a.

V. Spostamenti ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
129
Appendice 3: CONGRUENZA ESTENSIONALE Si consideri la generica asta appartenente
ad una struttura reticolare, Fig. 28; si a-dotti un sistema di riferimento cartesiano ortogonale “globale” (O;Z,Y,X) e si indi-chi con α l’inclinazione dell’asta rispetto all’asse Z; il versore
( )( ) ,Sen
,Cos,SenCos
if
if
lYYlZZ
−=−=+=
αα
αα JKa
fornisce l’orientamento dell’asta. Siano poi
,, fffiii JKDJKD VWVW +=+=
z
X
O K,Z,W
J,Y,V
wf
wi
f
i
α
a Df
Dil+∆l
l
j k,w
gli spostamenti dei nodi iniziale e finale dell’asta nel riferimento “globale”. Le lun
Fig. 28 - Deformazione estensionale dell’asta reticolare.
ghezze referenziale
( ) ( ) 2if
2if
r YYZZl −+−=
e attuale dell’asta
( ) ( )[ ] ( ) ( )[ ] 2iiff
2iiff
a VYVYWZWZl +−+++−+=
possono essere calcolate come distanze euclidee tra i nodi nelle forme referenziale e attuale rispettivamente.
La proiezione degli spostamenti nodali nel riferimento globale nella direzione referenziale a≡k consente di valutare le componenti assiali degli spostamenti nodali nel riferimento locale:
;, ffii kDkD ⋅=⋅= ww l’allungamento (accorciamento) dell’asta può pertanto essere approssimato dalla diffe-renza tra le suddette componenti:
.ifra wwlll −≅−=∆
La deformazione assiale dell’asta può allora essere definita come rapporto tra l’allungamento (accorciamento) di cui sopra e la lunghezza referenziale dell’asta:

Meccanica della Trave ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Ugo A. Andreaus - SCIENZA DELLE COSTRUZIONI • Progetto Leonardo - Editrice Esculapio - Bologna
130
.if
lww
ll −
≅=∆ε
La definizione precedente equivale ad approssimare la derivata spaziale della compo-nente assiale dello spostamento, che compare nell’Eq. (1.1)1, con la differenza finita “in avanti”:
( ) ( ) ( ) ,0ˆˆˆl
wlwzw −≅′
avendo assunto il nodo “iniziale” dell’asta come origine del sistema di riferimen-to“locale” (i;z,y,x), cioè avendo posto zi=0, zf=l. La trattazione precedente consente di istituire un’interessante ed utile analogia tra l’asta reticolare di lunghezza l e di rigidezza assiale A=costz da una parte e la molla estensionale di costante elastica Ke, dall’altra. Infatti, uguagliando le energie di defor-mazione elastica immagazzinate rispettivamente nell’asta (γm=χm=0), Eq. (IV.3.1) e App. II.6,
( ) ,21
21
21 2
0
2
0
2m ∆l
lAdz
l∆lAdzAU
ll=⎟
⎠⎞
⎜⎝⎛== ∫∫ ε
e nella molla, Eq. (IV.3.5),
( ) ,21 2
e ∆lKu =
a parità di variazione di lunghezza ∆l a partire dalla forma di riposo, si può identificare la rigidezza della molla equivalente all’asta:
Ke = A/l. Appendice 4: EQUILIBRIO dei NODI Con riferimento alla struttura reticolare già studiata in §3 mediante un’applicazione del Corollario degli Spostamenti Virtuali, le equazioni di equilibrio dei nodi liberi Eqq. (3.8) possono anche essere ricavate in modo diretto. Si parte dal generico campo di spostamento, Fig. 29a, nel quale le componenti degli spostamenti nodali sono assunte positive nella terna di riferimento adottata, Fig. 5. Le Eqq. (3.2) e (3.3) consentono di esprimere le forze assiali nelle aste in funzione delle componenti di spostamento dei nodi di estremità delle aste:
V. Spostamenti ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
131
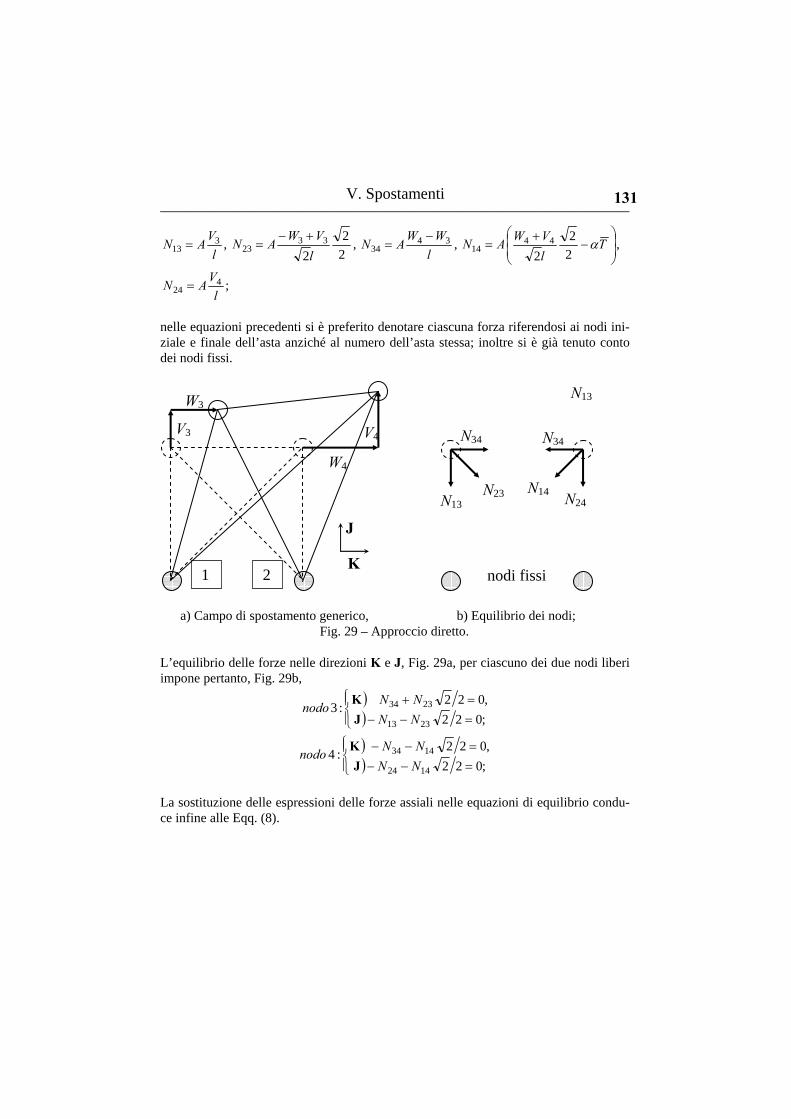
,313 l
VAN = ,22
233
23 lVWAN +−
= ,3434 l
WWAN −= ,
22
244
14 ⎟⎟⎠
⎞⎜⎜⎝
⎛−
+= T
lVWAN α
;424 l
VAN =
nelle equazioni precedenti si è preferito denotare ciascuna forza riferendosi ai nodi ini-ziale e finale dell’asta anziché al numero dell’asta stessa; inoltre si è già tenuto conto dei nodi fissi.
J
K 2 1
W4
V4
W3
V3
N34
N23 N13 N14 N24
N34
nodi fissi
a) Campo di spostamento generico, b) Equilibrio dei nodi;
Fig. 29 – Approccio diretto. L’equilibrio delle forze nelle direzioni K e J, Fig. 29a, per ciascuno dei due nodi liberi impone pertanto, Fig. 29b,
))⎪⎩
⎪⎨⎧
=−−=+
;022,022:3
2313
2334
NNNNnodo
JK
))⎪⎩
⎪⎨⎧
=−−=−−
;022,022:4
1424
1434
NNNNnodo
JK
La sostituzione delle espressioni delle forze assiali nelle equazioni di equilibrio condu-ce infine alle Eqq. (8).
N13