università di pisa - giorgio busoni's blog - giorgio in...
TRANSCRIPT
1
Università di Pisa
Facoltà di Scienze Matematiche, Fisiche e Naturali
Corso di Laurea in Fisica
Elaborato Finale
Applicazioni della teoria delle catastrofi alle lenti gravitazionali
Candidato Giorgio Busoni
Relatore Chiarissimo Prof. S.N. Shore
Anno Accademico 2008/2009
2
Indice
Sommario Indice ......................................................................................................................... 2
0 Introduzione ............................................................................................................ 3
0.1 Introduzione ...................................................................................................................................... 3
1 Teoria delle Catastrofi ............................................................................................. 5
1.1 La focalizzazione della Luce: generalità e stabilità delle caustiche[1] ................................................... 5
1.2 Propagazione della luce: fronte d’onda, potenziale ottico, raggi e caustiche[1][7][8] ............................... 6
1.3 Forme dei fronti d’onda e del potenziale, Teorema di Thom[1][7][8]......................................................11
1.4 La Piega[1] ..........................................................................................................................................13
1.5 La Cuspide[1] ......................................................................................................................................16
1.6 Coda di rondine[1] ..............................................................................................................................20
1.7 Alcune catastrofi generate dal vivo[1] .................................................................................................23
2 Lenti Gravitazionali ................................................................................................ 26
2.1 Introduzione[2] ...................................................................................................................................26
2.2 Calcolo della deflessione in Relatività Generale[6] ..............................................................................28
2.3 Massa puntiforme: calcolo della deflessione e degli effetti della lente[1] ............................................29
2.4 Massa non puntiforme: effetti dovuti a distribuzioni di massa non uniformi ......................................32
3 Appendice ............................................................................................................. 33
3.1 Hyperbolic Umbilic[1] .........................................................................................................................33
3.2 Elliptic Umbilic[1] ................................................................................................................................34
Bibliografia ............................................................................................................... 36

3
0 Introduzione
0.1 Introduzione In ottica geometrica la luce che si propaga nel vuoto segue un cammino rettilineo. Quando invece la luce deve passare attraverso della materia, la sua traiettoria può risultare deviata e seguire cammini non rettilinei. In particolare se la luce passa da un mezzo omogeneo ad un altro anche questo omogeneo, essa subirà una rifrazione con un angolo dettato dalla legge di Snel:
𝑛1𝑠𝑖𝑛 𝛼1 = 𝑛2𝑠𝑖𝑛 𝛼2 (0.1.1)
Quando invece la luce attraversa materiali trasparenti non omogenei, l’indice di rifrazione sarà una funzione delle coordinate, e la traiettoria non sarà più rettilinea: avremo che le traiettorie possibili cambieranno la loro forma con continuità nello spazio, e che quindi una famiglia di raggi che parte da un certo oggetto dopo una certa distanza andrà a formare un’immagine distorta dell’oggetto stesso.
Inoltre, secondo la relatività generale, la presenza di massa nello spazio modifica la struttura dello spazio stesso, rendendolo curvo, e quindi le geodetiche, percorsi di minima lunghezza fra 2 punti (che sono appunto i percorsi seguiti dalla luce secondo il teorema di Fermat), non sono più rette ma curve generiche dipendenti da come lo spazio stesso sia stato curvato.
Questo fenomeno era già stato ipotizzato in meccanica classica, cioè dal punto di vista della meccanica newtoniana: secondo la legge di Newton ogni corpo dotato di massa è attratto dalle altre masse, e quindi ipotizzando che i raggi di luce abbiano una certa massa, seppur piccola (siamo alle fine del 1700, e quindi ancora non si parla di fotoni e si conosce molto poco sulla luce), secondo la meccanica newtoniana questi, nel passare in uno spazio dove è presente un corpo massivo, devono subire una deviazione finita indipendente dalla massa della luce, ma dipendente da quella del corpo massivo e dalla distanza minima tra il corpo massivo e la traiettoria percorsa dal raggio di luce (parametro d’impatto).
Nel caso di una distribuzione di massa, invece che di un corpo massivo approssimativamente puntiforme, avremo che l’effetto che tale distribuzione avrà sulla propagazione di raggi di luce sarà simile a quanto si avrebbe nel caso di propagazione attraverso un mezzo con indice di rifrazione non costante (infatti in entrambi i casi le traiettorie variano nello spazio con continuità).
La luce che arriva fino a noi dallo spazio può aver attraversato distribuzioni di materia trasparente ed essere passata vicina a corpi massivi o a distribuzioni di massa opaca più o meno omogenee: di conseguenza la traiettoria della luce potrà essere anche molto diversa da quella rettilinea. Come ulteriore conseguenza abbiamo che le immagini che tali raggi formano quando noi li riceviamo possano essere distorte, cioè non riproducano fedelmente gli oggetti emittenti, tutto dipende da come viene “mappato” lo spazio sorgente nello spazio di destinazione.
In particolare vedremo che sarà utile a tale scopo considerare la matrice
⎣⎢⎢⎢⎡ 𝜕
2𝜑𝜕𝑥2
𝜕2𝜑𝜕𝑥𝜕𝑦
𝜕2𝜑𝜕𝑦𝜕𝑥
𝜕2𝜑𝜕𝑦2 ⎦
⎥⎥⎥⎤ (0.1.2)

4
Dove 𝜑 è un potenziale che descriveremo in seguito e che in pratica descrive la distanza fra un punto dello spazio sorgente (𝑥,𝑦,𝑓(𝑥,𝑦)) e un punto (𝑋,𝑌,𝑍) nello spazio di destinazione.
Vedremo che l’insieme dei punti (𝑥,𝑦) dove si annulla il determinante di tale matrice va a formare nello spazio delle superfici chiamate caustiche.
Per studiare allora la propagazione della luce e gli effetti che possono venire a verificarsi sarà utile studiare la teoria delle catastrofi, che studia appunto i modi in cui un fronte d’onda può deformarsi.
Lo studio di questi effetti è molto importante in quanto in astrofisica tutte le informazioni sperimentali vengono ottenute dalla luce che riceviamo, e per ricavare conclusione corrette a partire dai risultati degli esperimenti dobbiamo tenere conto anche di questi fenomeni: per esempio in un primo momento si credeva che corpi celesti che oggi sappiamo essere unici ma con immagini multiple create da una lente in realtà fossero più corpi con caratteristiche simili. Per di più dallo studio di questi effetti sarà possibile ricavare anche altre informazioni indirettamente, come la distribuzione della massa deflettente.
5
1 Teoria delle Catastrofi
1.1 La focalizzazione della Luce: generalità e stabilità delle caustiche[1] Parlando di ottica geometrica in genere si ha a che fare con lo studio di fasci di luce e dei modi di focalizzare tali fasci. Alcuni esempi possono essere specchi parabolici, o lenti sottili, o specchi sferici che, nell’approssimazione di raggio di curvatura grande rispetto alle dimensioni dell’oggetto, sono buone approssimazioni di specchi parabolici. Tutti questi strumenti ottici hanno uno o più punti caratteristici, detti fuochi, tali che se vengono colpiti da un fronte d’onda luminoso piano proveniente da una direzione ben specifica, tutti i raggi luminosi convergono proprio in uno di tali punti.
In tali punti si potranno quindi ottenere elevate intensità luminose, in quanto l’intera potenza trasportata dal fronte d’onda, invece di essere distribuita su un piano, viene concentrata nel fuoco. Per punti focali ideali, cioè puntiformi, l’intensità diverrebbe perciò infinita. Nelle applicazioni reali i fuochi non saranno esattamente puntiformi, e quindi l’intensità rimarrà finita, se pur molto alta rispetto all’intensità dell’onda originaria.
Possiamo dire che i punti focali di questi sistemi ottici non sono né generici, né stabili. Non sono generici, in quanto è necessaria una forma ben specifica della superficie riflettente/rifrangente per ottenere un vero fuoco puntiforme. Per esempio nel caso dello specchio è necessario che la superficie sia esattamente una parabola. Non sono stabili perché se si usa una superficie appena leggermente differente (come per esempio un guscio sferico) il fuoco cessa di essere puntiforme.
Spieghiamo ora cosa si intende per “leggermente differente”: sia
𝑆 = {𝑥,𝑦, 𝑧|𝑥 = 𝑥(𝑢, 𝑣),𝑦 = 𝑦(𝑢, 𝑣), 𝑧 = 𝑧(𝑢, 𝑣),𝑢, 𝑣 ∈ [0,1]} (1.1.1)
una generica superficie. Sia S’ la superficie trasformata.
𝑆′ = {𝑥,𝑦, 𝑧|𝑥 = 𝑥′(𝑤, 𝑡),𝑦 = 𝑦′(𝑤, 𝑡), 𝑧 = 𝑧′(𝑤, 𝑡),𝑤, 𝑡 ∈ [0,1]}(1.1.2)
Per semplificare la definizione di “leggermente differente”, ipotizziamo che il bordo della superficie non venga alterato dal diffeomorfismo, cioè che l’immagine del bordo sia il bordo stesso. Definisco S’ come leggermente (𝜀) differente se esiste un diffeomorfismo che permette di passare con continuità da S a S’, e se il volume di spazio compreso fra le due superfici è minore di una certa quantità 𝜀
𝑉 < 𝜀 (1.1.3)
Si può allora dire che il punto focale non è stabile perché se prendiamo una superficie 𝜀 -differente, con 𝜀 arbitrariamente piccolo, questa in generale non possiede più un fuoco puntiforme.
Tutto ciò non succede con le caustiche [1]: vedremo infatti che le caustiche sono generiche e stabili. Generiche, perché le superfici necessarie a generarle sono comuni in natura (per esempio anche le increspature dell’acqua in una piscina le generano), e stabili perché per piccoli cambiamenti della superficie rifrangente/riflettente le caustiche mantengono le loro proprietà.

6
1.2 Propagazione della luce: fronte d’onda, potenziale ottico, raggi e caustiche[1][7][8] Prendiamo un fronte d’onda, cioè una superficie nello spazio di punti in cui la radiazione luminosa ha tutta la stessa fase, descritto dalla superficie
𝑧 = 𝑓(𝑥,𝑦) (1.2.1)
Con 𝑓(𝑥,𝑦) ∈ 𝐶2. La distanza di un punto di coordinate X,Y,Z da un punto sul fronte d’onda sarà quindi
𝑙 = 𝑙(𝑥,𝑦,𝑋,𝑌,𝑍) = �(𝑋 − 𝑥)2 + (𝑌 − 𝑦)2 + �𝑍 − 𝑓(𝑥,𝑦)�2 (1.2.2)
Consideriamo ora solo l’espansione in serie al primo ordine, nel caso di oggetto lontano e parallasse:
Z >> 𝑓(x, y) e Z >> 𝑋 − 𝑥 𝑒 Z >> 𝑌 − 𝑦 (1.2.3)
𝑙(𝑥,𝑦,𝑋,𝑌,𝑍) = 𝑍 − 𝑓(𝑥,𝑦) +(𝑋 − 𝑥)2 + (𝑌 − 𝑦)2
2𝑍 (1.2.4)
Definiamo ora un “potenziale” per la luce
𝜑(𝑥, 𝑦,𝑋,𝑌.𝑍) = −𝑙 − 𝑐𝑜𝑠𝑡 = 𝑓(𝑥,𝑦) −𝑥2 − 2𝑋𝑥 + 𝑦2 − 2𝑌𝑦
2𝑍 (1.2.5)
Uguale a – 𝑙 a meno dei termini costanti. Nel vuoto, ad un istante fissato, avremo che la fase dell’onda sarà direttamente proporzionale a tale potenziale con costante di proporzionalità 𝑘, il numero d’onda.
I raggi diretti nel punto X,Y,Z si calcoleranno usando il principio di Fermat, cioè che il potenziale (distanza) è stazionario:
𝜕𝜑𝜕𝑥
= 0,𝜕𝜑𝜕𝑦
= 0 (1.2.6)
Per oggetti lontani si può fare il limite
𝑋,𝑌,𝑍 → ∞,𝑋𝑌→ 𝜀,
𝑌𝑍→ 𝜇 (1.2.7)
Dove 𝜀 e 𝜇 saranno due parametri che indicheranno la direzione dei raggi.
𝜑(𝑥,𝑦,𝑋,𝑌,𝑍) = −𝑙 = 𝑓(𝑥,𝑦) + 𝜀𝑥 + 𝜇𝑦 (1.2.8)
Allora i raggi saranno dati alle equazioni:
𝜀 = −𝜕𝑓𝜕𝑥
, 𝜇 = − 𝜕𝑓𝜕𝑦
(1.2.9)
Queste equazioni esprimono una mappa dallo spazio delle variabili x,y (che stanno sul fronte d’onda) allo spazio delle variabili angolari 𝜀 e 𝜇 (che indicano una direzione nello spazio). Per ogni punto del fronte d’onda sarà allora possibile trovare il rispettivo punto nello spazio delle variabili angolari (cioè una direzione nello spazio), tuttavia per una stessa direzione (punto dello spazio dei parametri angolari) potranno esserci più raggi originati da diversi punti (𝑥,𝑦) del fronte d’onda, oppure anche nessun raggio.
7
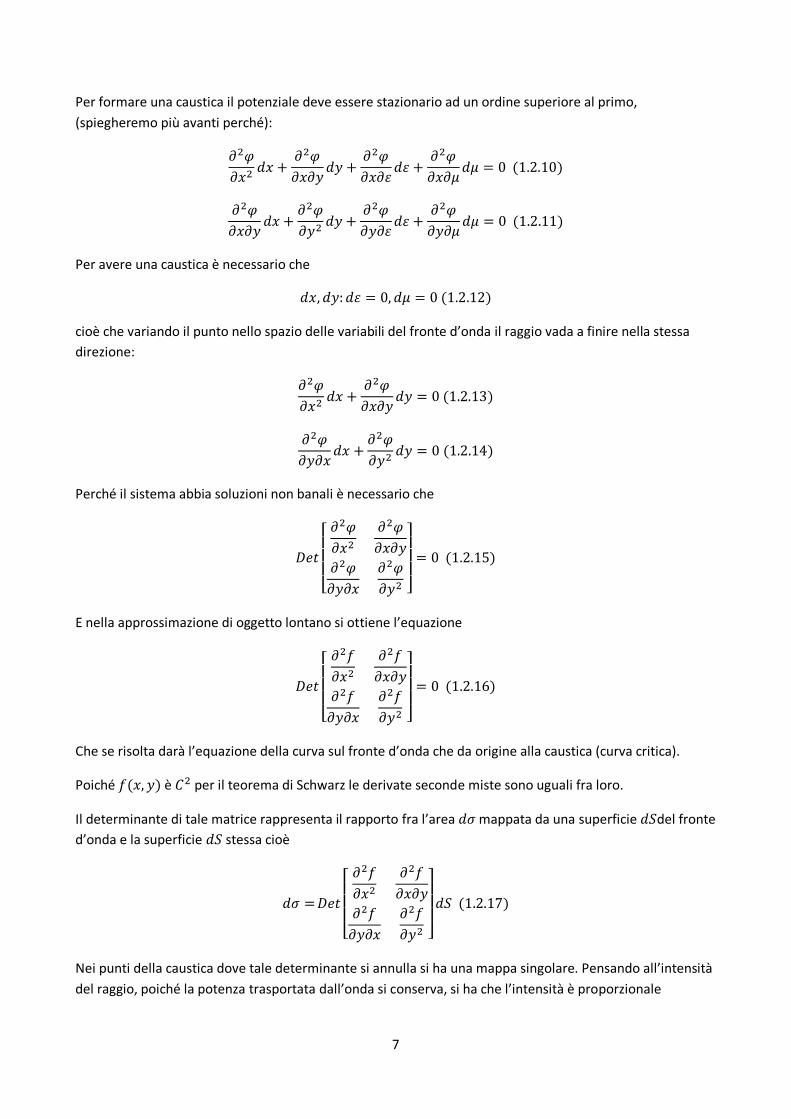
Per formare una caustica il potenziale deve essere stazionario ad un ordine superiore al primo, (spiegheremo più avanti perché):
𝜕2𝜑𝜕𝑥2
𝑑𝑥 +𝜕2𝜑𝜕𝑥𝜕𝑦
𝑑𝑦 +𝜕2𝜑𝜕𝑥𝜕𝜀
𝑑𝜀 +𝜕2𝜑𝜕𝑥𝜕𝜇
𝑑𝜇 = 0 (1.2.10)
𝜕2𝜑𝜕𝑥𝜕𝑦
𝑑𝑥 +𝜕2𝜑𝜕𝑦2
𝑑𝑦 +𝜕2𝜑𝜕𝑦𝜕𝜀
𝑑𝜀 +𝜕2𝜑𝜕𝑦𝜕𝜇
𝑑𝜇 = 0 (1.2.11)
Per avere una caustica è necessario che
𝑑𝑥,𝑑𝑦:𝑑𝜀 = 0,𝑑𝜇 = 0 (1.2.12)
cioè che variando il punto nello spazio delle variabili del fronte d’onda il raggio vada a finire nella stessa direzione:
𝜕2𝜑𝜕𝑥2
𝑑𝑥 +𝜕2𝜑𝜕𝑥𝜕𝑦
𝑑𝑦 = 0 (1.2.13)
𝜕2𝜑𝜕𝑦𝜕𝑥
𝑑𝑥 +𝜕2𝜑𝜕𝑦2
𝑑𝑦 = 0 (1.2.14)
Perché il sistema abbia soluzioni non banali è necessario che
𝐷𝑒𝑡
⎣⎢⎢⎢⎡ 𝜕
2𝜑𝜕𝑥2
𝜕2𝜑𝜕𝑥𝜕𝑦
𝜕2𝜑𝜕𝑦𝜕𝑥
𝜕2𝜑𝜕𝑦2 ⎦
⎥⎥⎥⎤
= 0 (1.2.15)
E nella approssimazione di oggetto lontano si ottiene l’equazione
𝐷𝑒𝑡
⎣⎢⎢⎢⎡ 𝜕
2𝑓𝜕𝑥2
𝜕2𝑓𝜕𝑥𝜕𝑦
𝜕2𝑓𝜕𝑦𝜕𝑥
𝜕2𝑓𝜕𝑦2 ⎦
⎥⎥⎥⎤
= 0 (1.2.16)
Che se risolta darà l’equazione della curva sul fronte d’onda che da origine alla caustica (curva critica).
Poiché 𝑓(𝑥,𝑦) è 𝐶2 per il teorema di Schwarz le derivate seconde miste sono uguali fra loro.
Il determinante di tale matrice rappresenta il rapporto fra l’area 𝑑𝜎 mappata da una superficie 𝑑𝑆del fronte d’onda e la superficie 𝑑𝑆 stessa cioè
𝑑𝜎 =𝐷𝑒𝑡
⎣⎢⎢⎢⎡ 𝜕
2𝑓𝜕𝑥2
𝜕2𝑓𝜕𝑥𝜕𝑦
𝜕2𝑓𝜕𝑦𝜕𝑥
𝜕2𝑓𝜕𝑦2 ⎦
⎥⎥⎥⎤𝑑𝑆 (1.2.17)
Nei punti della caustica dove tale determinante si annulla si ha una mappa singolare. Pensando all’intensità del raggio, poiché la potenza trasportata dall’onda si conserva, si ha che l’intensità è proporzionale
8
all’inverso del determinante della matrice (1.2.17), e quindi nella caustica questa diverrebbe infinita. In realtà ciò non succede perché questa espressione per l’area è un’approssimazione al primo ordine.
Ciò che succede in pratica quando si passa attraverso una caustica è che il numero di raggi che arrivano cambia.
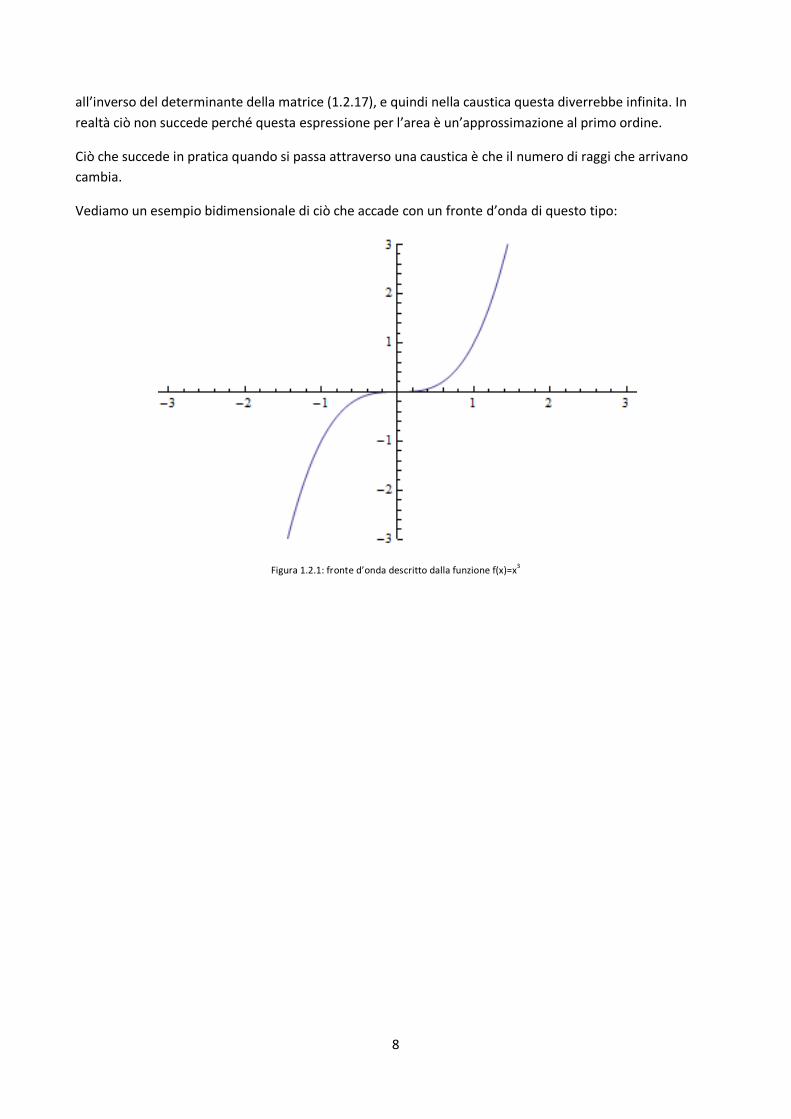
Vediamo un esempio bidimensionale di ciò che accade con un fronte d’onda di questo tipo:
Figura 1.2.1: fronte d’onda descritto dalla funzione f(x)=x3
9
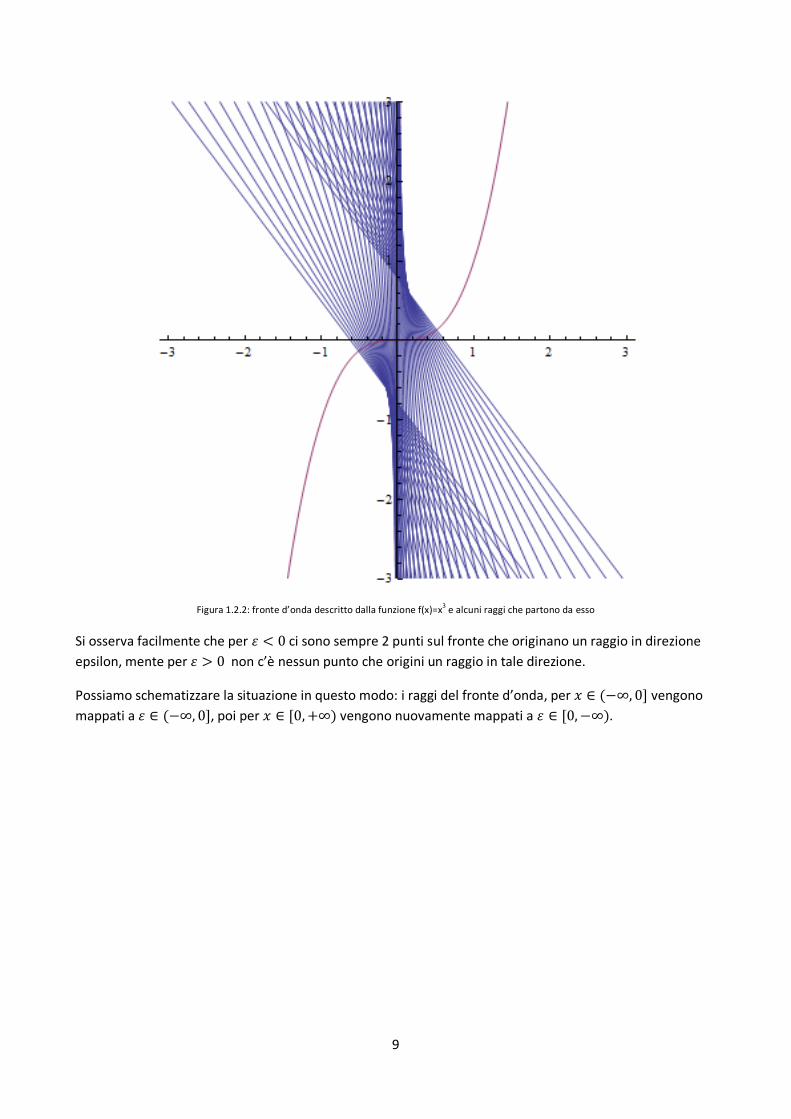
Figura 1.2.2: fronte d’onda descritto dalla funzione f(x)=x3 e alcuni raggi che partono da esso
Si osserva facilmente che per 𝜀 < 0 ci sono sempre 2 punti sul fronte che originano un raggio in direzione epsilon, mente per 𝜀 > 0 non c’è nessun punto che origini un raggio in tale direzione.
Possiamo schematizzare la situazione in questo modo: i raggi del fronte d’onda, per 𝑥 ∈ (−∞, 0] vengono mappati a 𝜀 ∈ (−∞, 0], poi per 𝑥 ∈ [0, +∞) vengono nuovamente mappati a 𝜀 ∈ [0,−∞).
10
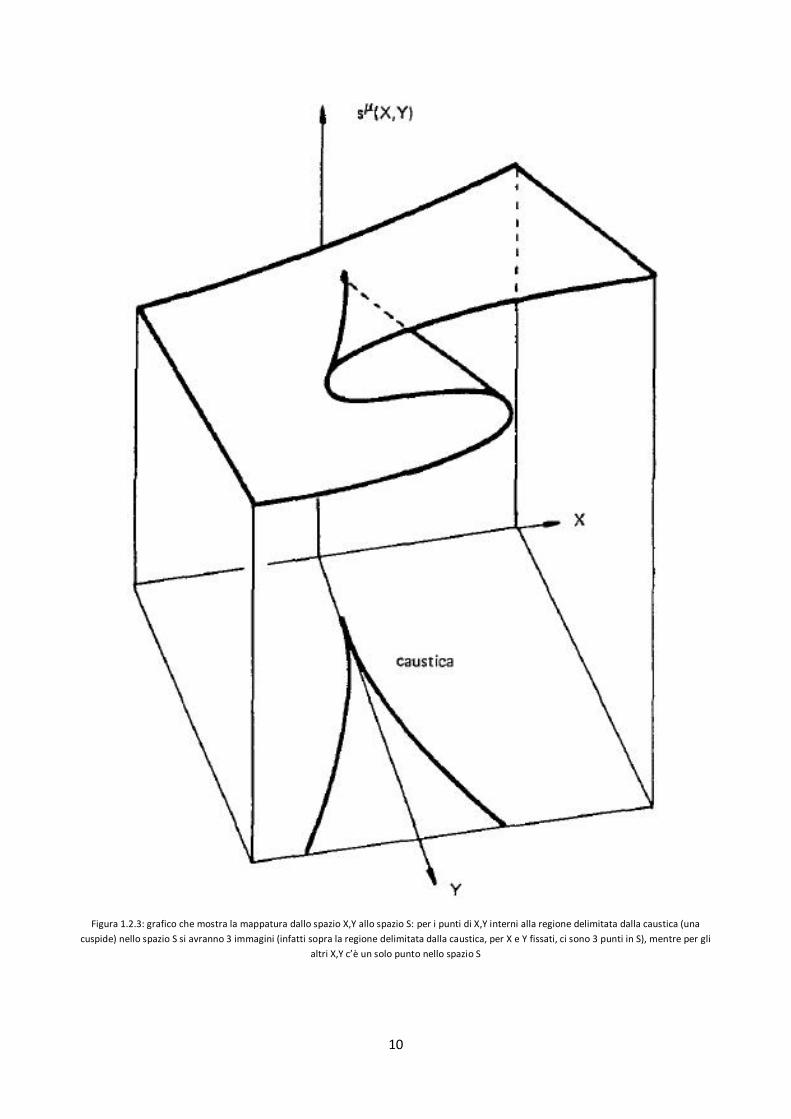
Figura 1.2.3: grafico che mostra la mappatura dallo spazio X,Y allo spazio S: per i punti di X,Y interni alla regione delimitata dalla caustica (una cuspide) nello spazio S si avranno 3 immagini (infatti sopra la regione delimitata dalla caustica, per X e Y fissati, ci sono 3 punti in S), mentre per gli
altri X,Y c’è un solo punto nello spazio S

11
Spieghiamo ora perché abbiamo imposto come condizione che il potenziale sia stazionario ad un ordine superiore al primo:
una ragione è appunto il fatto che vogliamo trovare i punti dove l’intensità della luce è (in prima approssimazione) infinita. C’è anche un’altra ragione, equivalente alla precedente:
Se diagonalizziamo il jacobiano, nella base in cui esso è diagonale i due elementi diagonali si chiamano curvature principali 𝐾𝑥 ,𝐾𝑦. Queste indicano l’inverso del raggio di curvatura del fronte d’onda lungo le due direzioni principali (che sono gli assi nella nuova base). Quindi ad una distanza 1/𝐾𝑥 dal fronte la luce sarà focalizzata lungo l’asse x e non focalizzata lungo l’asse y, formando quindi una piega. Ad una distanza 1/𝐾𝑦 la luce sarà invece focalizzata lungo l’asse y e non lungo x. Richiedere che il determinante del jacobiano si annulli significa richiedere che una fra le due curvature principali si annulli, cioè che uno dei due raggi di curvatura principali sia infinito e che pertanto una delle due pieghe sia localizzata ad una distanza infinita: ciò, nelle nostre approssimazioni di parallasse e di osservatore molto lontano dal fronte d’onda, coincide proprio la distanza a cui andiamo ad osservare l’immagine. Quindi imporre che il determinante del jacobiano sia nullo equivale a imporre la presenza di almeno una piega nell’immagine che andiamo ad osservare.
1.3 Forme dei fronti d’onda e del potenziale, Teorema di Thom[1][7][8] Nelle approssimazioni fatte fin qui il fronte d’onda risulta abbastanza “piatto”, cioè la normale in ogni punto è quasi parallelo all’asse z (approssimazione di parallasse), ed inoltre ci interesserà l’andamento della funzione solo per una regione limitata dello spazio. Perciò potremo sempre sviluppare 𝑓(𝑥,𝑦) in serie di Taylor. Considereremo quindi solo funzioni polinomiali per descrivere il fronte d’onda. In questo caso possiamo usare il teorema di Thom, che classifica le varie caustiche a meno di diffeomorfismi differenziabili con inverso differenziabile, e assegna ad ognuna una forma standard del potenziale, cioè una forma a cui, partendo da un potenziale che descrive quella caustica, ci si può sempre ridurre attraverso trasformazioni ammesse.
Ad esempio una trasformazione che si può effettuare è
�𝑥 → 𝑎𝑥 + 𝑏𝑦 + 𝑒𝑦 → 𝑐𝑥 + 𝑑𝑦 + 𝑓𝑎𝑑 − 𝑐𝑏 ≠ 0
(1.3.1)
In questa tabella si elencano le 7 caustiche più semplici, cioè quelle con “Corank ≤ 2 e Codimensione ≤ 4
Nome CoRank CoDimension Germ Unfolding Terms Fold (Piega) 1 1 𝑥3 + 𝑦2 𝑥 Cusp (Cuspide) 1 2 ±𝑥4 + 𝑦2 𝑥2 , 𝑥 Swallowtail (Coda di Rondine)
1 3 𝑥5 + 𝑦2 𝑥3 , 𝑥2 , 𝑥
Butterfly (Farfalla) 1 4 ±𝑥6 + 𝑦2 𝑥4 , 𝑥3 , 𝑥2 , 𝑥 Hyperbolic Umbilic 2 3 𝑥3 + 𝑥𝑦2 𝑥2 + 𝑦2, 𝑥,𝑦 Elliptic Umbilic 2 3 𝑥3 − 𝑥𝑦2 𝑥2 + 𝑦2, 𝑥,𝑦 Parabolic Umbilic 2 4 𝑥4 + 𝑥𝑦2 𝑥2 ,𝑦2, 𝑥,𝑦

12
Il “CoRank” è il numero di variabili essenziali da cui dipende il potenziale che, per situazioni stazionarie, può essere al massimo 2, cioè le variabili (𝑥,𝑦). Chiariamo cosa vuol dire essenziali: un esempio sono le caustiche con “CoRank” 1 in cui si vede comparire un termine in 𝑦2: il potenziale in questi casi dipende da 2 variabili, ma la seconda variabile (𝑦) è in pratica un termine ininfluente; infatti tale variabile compare solo in un termine in 𝑦2 la cui derivata seconda mista è sempre nulla e la cui derivata seconda rispetto a y non è mai nulla: di fatto quindi la condizione che il determinante del jacobiano sia nullo equivale alla condizione che la derivata seconda del potenziale rispetto a x sia nulla, riportando di fatto il nostro problema a un problema unidimensionale con una singola variabile.
La CoDimensione invece è la dimensione dello spazio dei parametri da cui dipende il potenziale. Per problemi unidimensionali si può verificare facilmente come questa sia uguale al grado n del polinomio diminuito di 2: infatti un polinomio generico di grado n (che è completamente determinato da n+1 coefficienti) può essere sempre ridotto a un polinomio di grado n monico con una trasformazione del tipo
𝑥 → 𝛼𝑥 (1.3.2)
In questo modo i coefficienti liberi si riducono ad n. Inoltre si può sempre annullare il coefficiente del monomio di grado n-1 con una trasformazione del tipo
𝑥 → 𝑥 − 𝛽 (1.3.3)
In questo modo i gradi di libertà si riducono ad n-1. Se a queste considerazioni aggiungiamo il fatto che a noi non interessa il termine noto in quanto le caustiche sono definite solo dalle derivate del potenziale si ottiene che per problemi unidimensionali la dimensione dello spazio di controllo è n-2.
Scriviamo ora il potenziale in un’altra forma che useremo poi per analizzare le caustiche più semplici:
definiamo una nuova funzione
𝑔(𝑥,𝑦) = 𝑓(𝑥,𝑦)−𝑥2 + 𝑦2
2𝑍0 (1.3.4)
Il significato di questa operazione sta nello specificare l’altezza del fronte d’onda, non più rispetto al piano z=0, ma rispetto a un paraboloide di rotazione. Se la funzione 𝑓(𝑥,𝑦) ha nel suo sviluppo attorno all’origine un termine quadratico del tipo 𝑐𝑜𝑠𝑡 × (𝑥2 + 𝑦2) è naturale scegliere uno 𝑍0 tale da annullare tale termine quadratico, altrimenti si può scegliere comunque uno 𝑍0 “comodo” per semplificare i calcoli.
Si ha allora, partendo dal potenziale in 1.2.5 (quello dove non era stato fatto il limite per 𝑧 → ∞):
𝜑(𝑥,𝑦,𝑋,𝑌.𝑍) = 𝑔(𝑥,𝑦) +12�
1𝑍0−
1𝑍� (𝑥2 + 𝑦2) +
𝑋𝑍𝑥 +
𝑌𝑍𝑦 (1.3.5)
Questo ci suggerisce di ridefinire delle variabili di controllo nella forma
𝜀 =𝑋𝑍
, 𝜇 =𝑌𝑍
, 𝛾 =12�
1𝑍0−
1𝑍� (1.3.6)
E il potenziale diventa:
𝜑(𝑥,𝑦, 𝜀, 𝜇. 𝛾) = 𝑔(𝑥,𝑦) + 𝛾(𝑥2 + 𝑦2) + 𝜀𝑥 + 𝜇𝑦 (1.3.7)
13
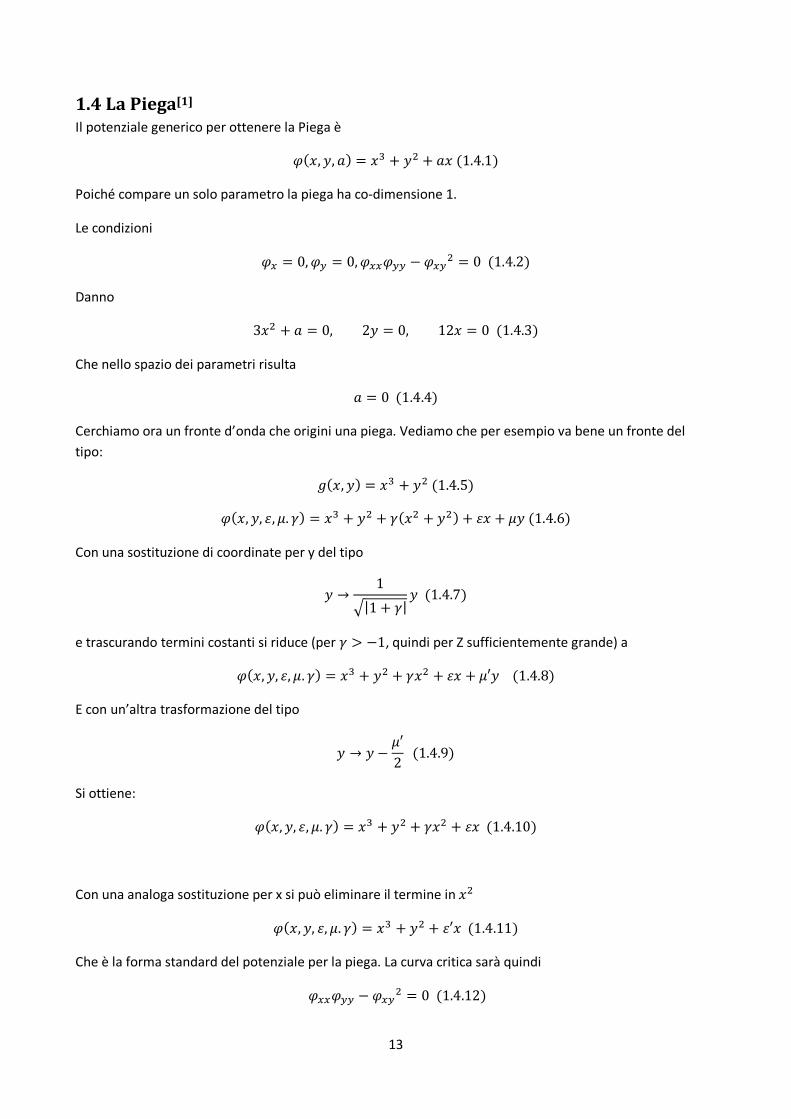
1.4 La Piega[1] Il potenziale generico per ottenere la Piega è
𝜑(𝑥,𝑦,𝑎) = 𝑥3 + 𝑦2 + 𝑎𝑥 (1.4.1)
Poiché compare un solo parametro la piega ha co-dimensione 1.
Le condizioni
𝜑𝑥 = 0,𝜑𝑦 = 0,𝜑𝑥𝑥𝜑𝑦𝑦 − 𝜑𝑥𝑦2 = 0 (1.4.2)
Danno
3𝑥2 + 𝑎 = 0, 2𝑦 = 0, 12𝑥 = 0 (1.4.3)
Che nello spazio dei parametri risulta
𝑎 = 0 (1.4.4)
Cerchiamo ora un fronte d’onda che origini una piega. Vediamo che per esempio va bene un fronte del tipo:
𝑔(𝑥,𝑦) = 𝑥3 + 𝑦2 (1.4.5)
𝜑(𝑥,𝑦, 𝜀, 𝜇. 𝛾) = 𝑥3 + 𝑦2 + 𝛾(𝑥2 + 𝑦2) + 𝜀𝑥 + 𝜇𝑦 (1.4.6)
Con una sostituzione di coordinate per y del tipo
𝑦 →1
�|1 + 𝛾|𝑦 (1.4.7)
e trascurando termini costanti si riduce (per 𝛾 > −1, quindi per Z sufficientemente grande) a
𝜑(𝑥,𝑦, 𝜀, 𝜇. 𝛾) = 𝑥3 + 𝑦2 + 𝛾𝑥2 + 𝜀𝑥 + 𝜇′𝑦 (1.4.8)
E con un’altra trasformazione del tipo
𝑦 → 𝑦 −𝜇′2
(1.4.9)
Si ottiene:
𝜑(𝑥,𝑦, 𝜀, 𝜇. 𝛾) = 𝑥3 + 𝑦2 + 𝛾𝑥2 + 𝜀𝑥 (1.4.10)
Con una analoga sostituzione per x si può eliminare il termine in 𝑥2
𝜑(𝑥,𝑦, 𝜀, 𝜇. 𝛾) = 𝑥3 + 𝑦2 + 𝜀′𝑥 (1.4.11)
Che è la forma standard del potenziale per la piega. La curva critica sarà quindi
𝜑𝑥𝑥𝜑𝑦𝑦 − 𝜑𝑥𝑦2 = 0 (1.4.12)

14
Cioè
𝑥 = 0 (1.4.13)
Questa è l’equazione della curva critica della piega.
Figura 1.4.1: fronte d’onda descritto dalla funzione f(x)=x3 e raggi che partono da esso
Le possibili zone di osservazione sono 3: 𝜀 > 0 che ha un potenziale del tipo:
15
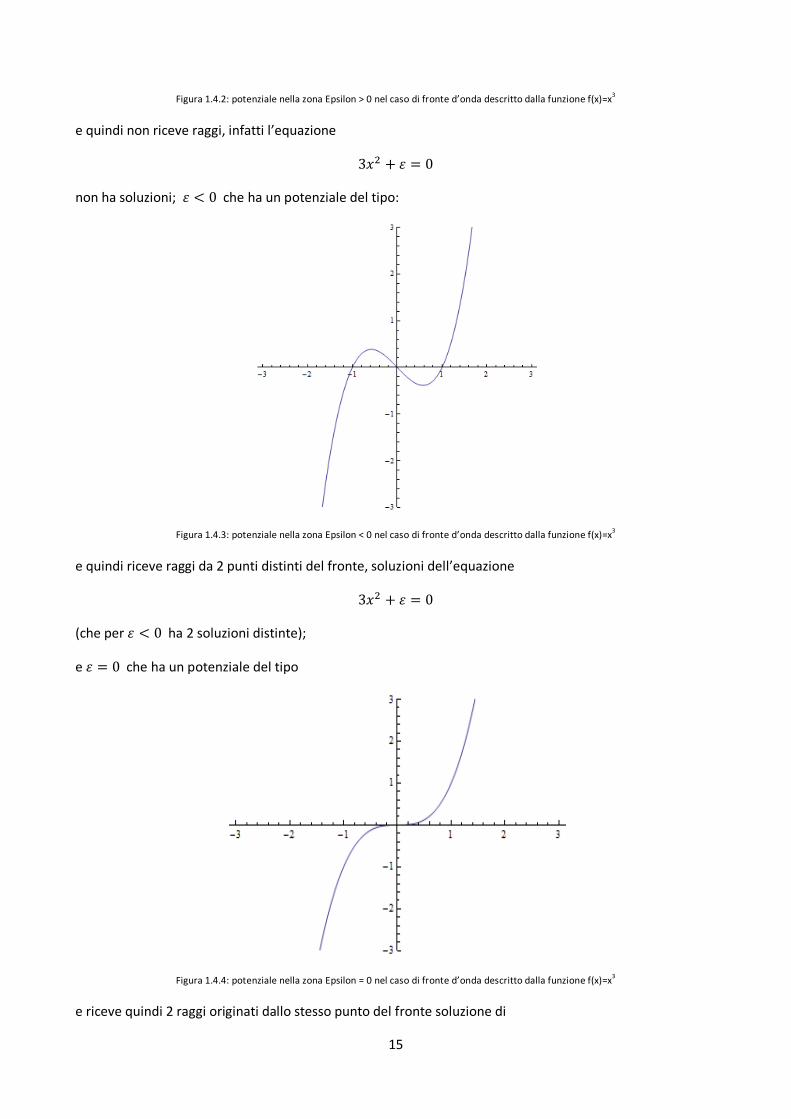
Figura 1.4.2: potenziale nella zona Epsilon > 0 nel caso di fronte d’onda descritto dalla funzione f(x)=x3
e quindi non riceve raggi, infatti l’equazione
3𝑥2 + 𝜀 = 0
non ha soluzioni; 𝜀 < 0 che ha un potenziale del tipo:
Figura 1.4.3: potenziale nella zona Epsilon < 0 nel caso di fronte d’onda descritto dalla funzione f(x)=x3
e quindi riceve raggi da 2 punti distinti del fronte, soluzioni dell’equazione
3𝑥2 + 𝜀 = 0
(che per 𝜀 < 0 ha 2 soluzioni distinte);
e 𝜀 = 0 che ha un potenziale del tipo
Figura 1.4.4: potenziale nella zona Epsilon = 0 nel caso di fronte d’onda descritto dalla funzione f(x)=x3
e riceve quindi 2 raggi originati dallo stesso punto del fronte soluzione di

16
3𝑥2 = 0
1.5 La Cuspide[1] Il potenziale generico per ottenere la Cuspide è
𝜑(𝑥,𝑦,𝑎, 𝑏) = 𝑥4 + 𝑦2 + 𝑏𝑥2 + 𝑎𝑥 (1.5.1)
Le condizioni sono:
𝜑𝑥 = 0,𝜑𝑦 = 0,𝜑𝑥𝑥𝜑𝑦𝑦 − 𝜑𝑥𝑦2 = 0 (1.5.2)
e danno
4𝑥3 + 2𝑏𝑥 + 𝑎 = 0, 2𝑦 = 0, 24𝑥2 + 4𝑏 = 0 (1.5.3)
che nello spazio dei parametri si può esplicitare come
𝑏 = −6𝑥2 ,𝑎 = −(4𝑥3 + 2𝑏𝑥) = −2𝑥(2𝑥2 + 𝑏) = −2𝑥(−2𝑥2) = 4𝑥3 = (−𝑏6
)32 (1.5.4)
𝑏 = −6𝑎23 (1.5.5)
La parte essenziale della relazione è l’esponente = 23
Cerchiamo ora un fronte d’onda che origini una cuspide. Possiamo verificare che un fronte generico è:
𝑔(𝑥,𝑦) = 𝑥4 + 𝑦2 (1.5.6)
𝜑(𝑥,𝑦, 𝜀, 𝜇. 𝛾) = 𝑥4 + 𝑦2 + 𝛾(𝑥2 + 𝑦2) + 𝜀𝑥 + 𝜇𝑦 (1.5.7)
Con sostituzioni per y analoghe a quelle per la piega e trascurando i termini costanti ci si riduce a
𝜑(𝑥,𝑦, 𝜀, 𝜇. 𝛾) = 𝑥4 + 𝑦2 + 𝛾𝑥2 + 𝜀𝑥 (1.5.8)
Che è la forma standard del potenziale per la cuspide.
La curva critica sarà pertanto
𝜑𝑥𝑥𝜑𝑦𝑦 − 𝜑𝑥𝑦2 = 0 (1.5.9)
12𝑥2 + 2𝛾 = 0 (1.5.10)
La curva critica della cuspide è quindi l’insieme di due rette parallele all’asse x.
17
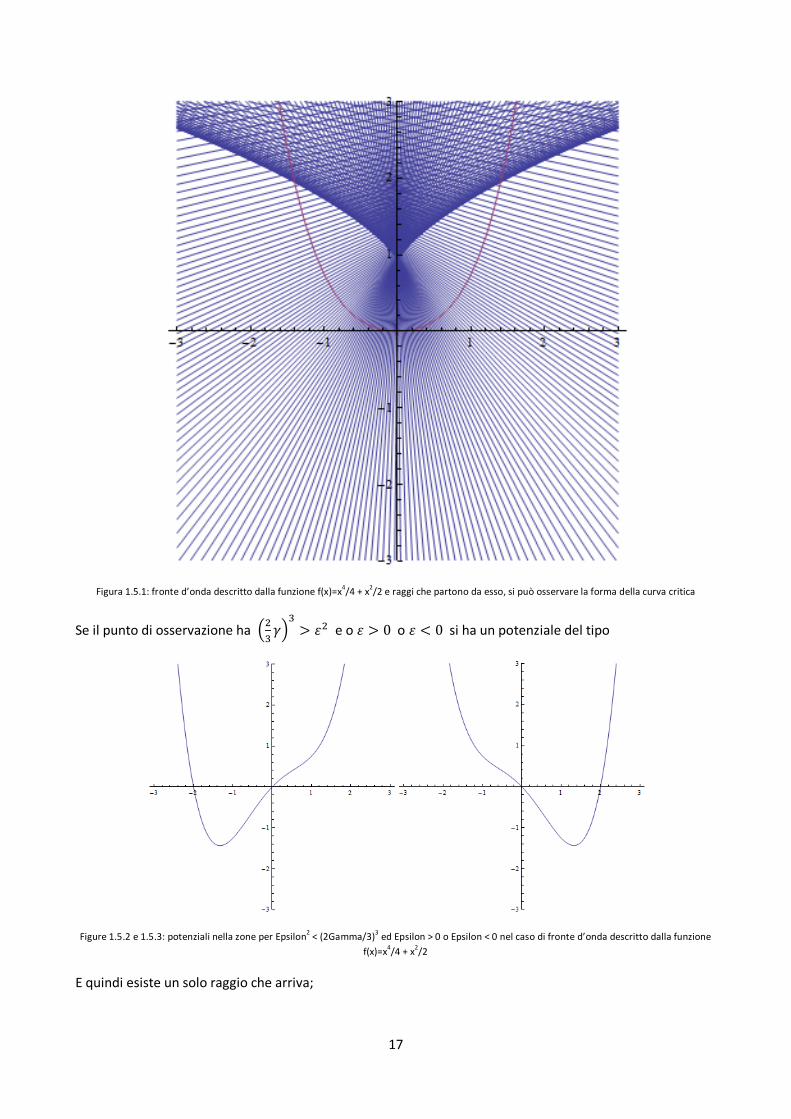
Figura 1.5.1: fronte d’onda descritto dalla funzione f(x)=x4/4 + x2/2 e raggi che partono da esso, si può osservare la forma della curva critica
Se il punto di osservazione ha �23𝛾�
3> 𝜀2 e o 𝜀 > 0 o 𝜀 < 0 si ha un potenziale del tipo
Figure 1.5.2 e 1.5.3: potenziali nella zone per Epsilon2 < (2Gamma/3)3 ed Epsilon > 0 o Epsilon < 0 nel caso di fronte d’onda descritto dalla funzione f(x)=x4/4 + x2/2
E quindi esiste un solo raggio che arriva;
18
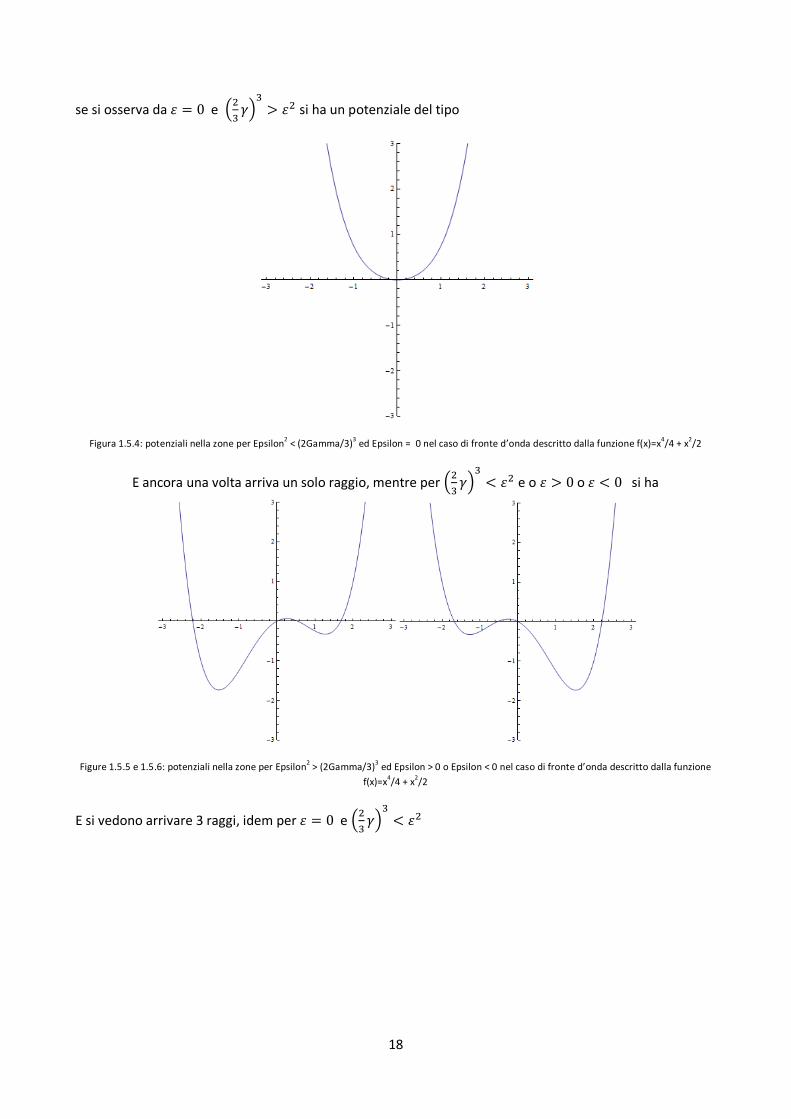
se si osserva da 𝜀 = 0 e �23𝛾�
3> 𝜀2 si ha un potenziale del tipo
Figura 1.5.4: potenziali nella zone per Epsilon2 < (2Gamma/3)3 ed Epsilon = 0 nel caso di fronte d’onda descritto dalla funzione f(x)=x4/4 + x2/2
E ancora una volta arriva un solo raggio, mentre per �23𝛾�
3< 𝜀2 e o 𝜀 > 0 o 𝜀 < 0 si ha
Figure 1.5.5 e 1.5.6: potenziali nella zone per Epsilon2 > (2Gamma/3)3 ed Epsilon > 0 o Epsilon < 0 nel caso di fronte d’onda descritto dalla funzione f(x)=x4/4 + x2/2
E si vedono arrivare 3 raggi, idem per 𝜀 = 0 e �23𝛾�
3< 𝜀2
19
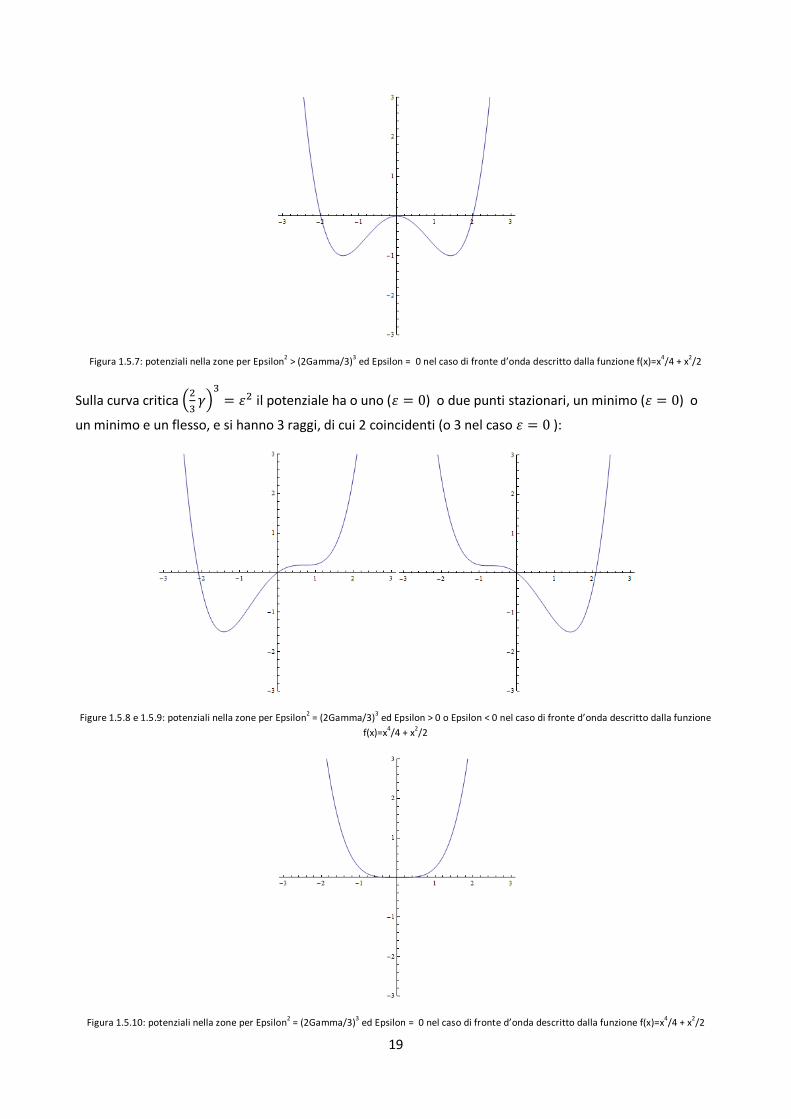
Figura 1.5.7: potenziali nella zone per Epsilon2 > (2Gamma/3)3 ed Epsilon = 0 nel caso di fronte d’onda descritto dalla funzione f(x)=x4/4 + x2/2
Sulla curva critica �23𝛾�
3= 𝜀2 il potenziale ha o uno (𝜀 = 0) o due punti stazionari, un minimo (𝜀 = 0) o
un minimo e un flesso, e si hanno 3 raggi, di cui 2 coincidenti (o 3 nel caso 𝜀 = 0 ):
Figure 1.5.8 e 1.5.9: potenziali nella zone per Epsilon2 = (2Gamma/3)3 ed Epsilon > 0 o Epsilon < 0 nel caso di fronte d’onda descritto dalla funzione f(x)=x4/4 + x2/2
Figura 1.5.10: potenziali nella zone per Epsilon2 = (2Gamma/3)3 ed Epsilon = 0 nel caso di fronte d’onda descritto dalla funzione f(x)=x4/4 + x2/2

20
1.6 Coda di rondine[1] Il potenziale generico per ottenere la Coda di rondine è
𝜑(𝑥,𝑦, 𝑎, 𝑏, 𝑐) = 𝑥5 + 𝑦2 + 𝑐𝑥3 + 𝑏𝑥2 + 𝑎𝑥 (1.6.1)
Le condizioni sono
𝜑𝑥 = 0,𝜑𝑦 = 0,𝜑𝑥𝑥𝜑𝑦𝑦 − 𝜑𝑥𝑦2 = 0 (1.6.2)
e danno
5𝑥4 + 3𝑐𝑥2 + 2𝑏𝑥 + 𝑎 = 0, 2𝑦 = 0, 40𝑥3 + 12𝑐𝑥 + 4𝑏 = 0 (1.6.3)
Per parametrizzare la superficie calcoliamo anche le derivate in x successive:
𝜑𝑥𝑥(𝑥,𝑦,𝑎, 𝑏, 𝑐) = 40𝑥3 + 12𝑐𝑥 + 4𝑏 = 2𝑝 (1.6.4)
𝜑𝑥𝑥𝑥(𝑥,𝑦,𝑎, 𝑏, 𝑐) = 120𝑥2 + 12𝑐 = 3!𝑞 (1.6.5)
𝜑𝑥𝑥𝑥𝑥(𝑥,𝑦,𝑎, 𝑏, 𝑐) = 240𝑥 = 5! 𝑟 (1.6.6)
Si ricava
𝑥 = 𝑟 𝑐 =12𝑞 − 10𝑟2 𝑏 =
12𝑝 − 3 �
12𝑞 − 10𝑟2� 𝑟 − 10𝑟3 (1.6.7)
𝑎 = −5𝑟4 − 3 �12𝑞 − 10𝑟2� 𝑟2 − 2 �
12𝑝 − 3 �
12𝑞 − 10𝑟2� 𝑟 − 10𝑟3� 𝑟 (1.6.8)
La condizione per avere la caustica è 𝑝 = 0 quindi nello spazio dei parametri si ottiene:
𝑎 = −75𝑟4 +32𝑞𝑟2 𝑏 = −
32𝑞𝑟 + 20𝑟3 𝑐 =
12𝑞 − 10𝑟2 (1.6.9)
Possiamo disegnare un grafico 3D di questa superficie con “Mathematica”, e avrà questo aspetto:
Figura 1.6.1: forma tridimensionale della Coda di rondine nello spazio dei parametri
21
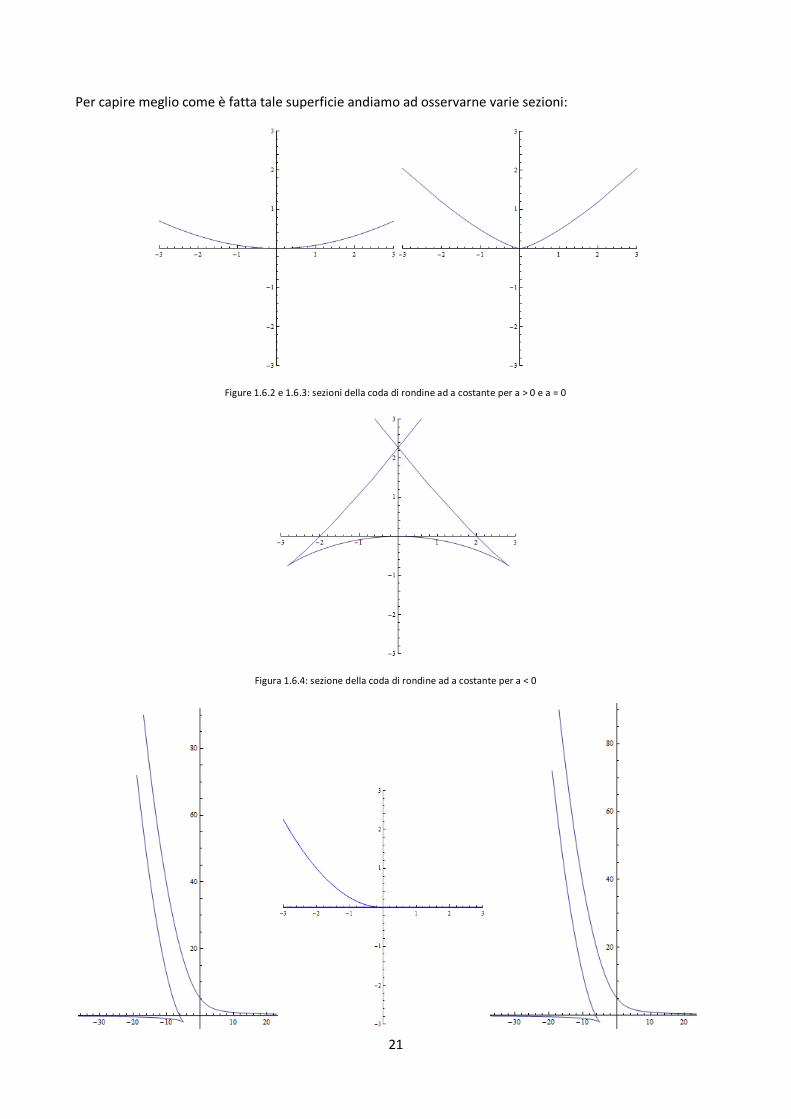
Per capire meglio come è fatta tale superficie andiamo ad osservarne varie sezioni:
Figure 1.6.2 e 1.6.3: sezioni della coda di rondine ad a costante per a > 0 e a = 0
Figura 1.6.4: sezione della coda di rondine ad a costante per a < 0
22
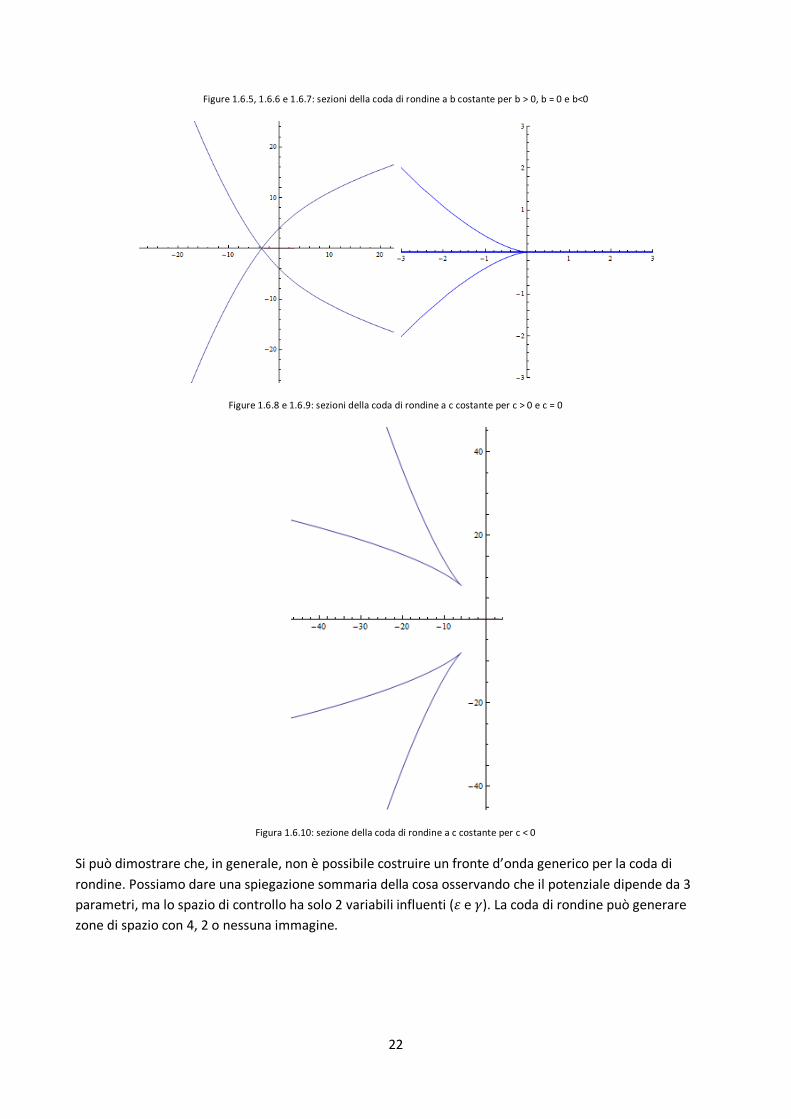
Figure 1.6.5, 1.6.6 e 1.6.7: sezioni della coda di rondine a b costante per b > 0, b = 0 e b<0
Figure 1.6.8 e 1.6.9: sezioni della coda di rondine a c costante per c > 0 e c = 0
Figura 1.6.10: sezione della coda di rondine a c costante per c < 0
Si può dimostrare che, in generale, non è possibile costruire un fronte d’onda generico per la coda di rondine. Possiamo dare una spiegazione sommaria della cosa osservando che il potenziale dipende da 3 parametri, ma lo spazio di controllo ha solo 2 variabili influenti (𝜀 e 𝛾). La coda di rondine può generare zone di spazio con 4, 2 o nessuna immagine.
23
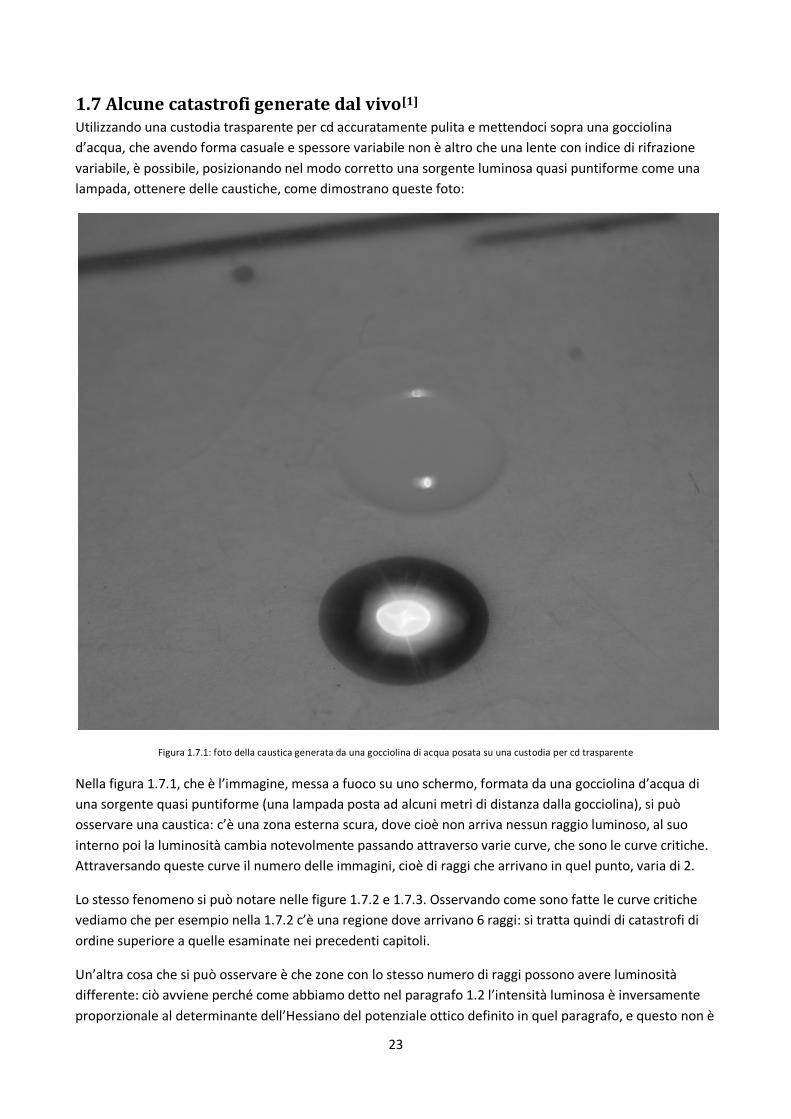
1.7 Alcune catastrofi generate dal vivo[1] Utilizzando una custodia trasparente per cd accuratamente pulita e mettendoci sopra una gocciolina d’acqua, che avendo forma casuale e spessore variabile non è altro che una lente con indice di rifrazione variabile, è possibile, posizionando nel modo corretto una sorgente luminosa quasi puntiforme come una lampada, ottenere delle caustiche, come dimostrano queste foto:
Figura 1.7.1: foto della caustica generata da una gocciolina di acqua posata su una custodia per cd trasparente
Nella figura 1.7.1, che è l’immagine, messa a fuoco su uno schermo, formata da una gocciolina d’acqua di una sorgente quasi puntiforme (una lampada posta ad alcuni metri di distanza dalla gocciolina), si può osservare una caustica: c’è una zona esterna scura, dove cioè non arriva nessun raggio luminoso, al suo interno poi la luminosità cambia notevolmente passando attraverso varie curve, che sono le curve critiche. Attraversando queste curve il numero delle immagini, cioè di raggi che arrivano in quel punto, varia di 2.
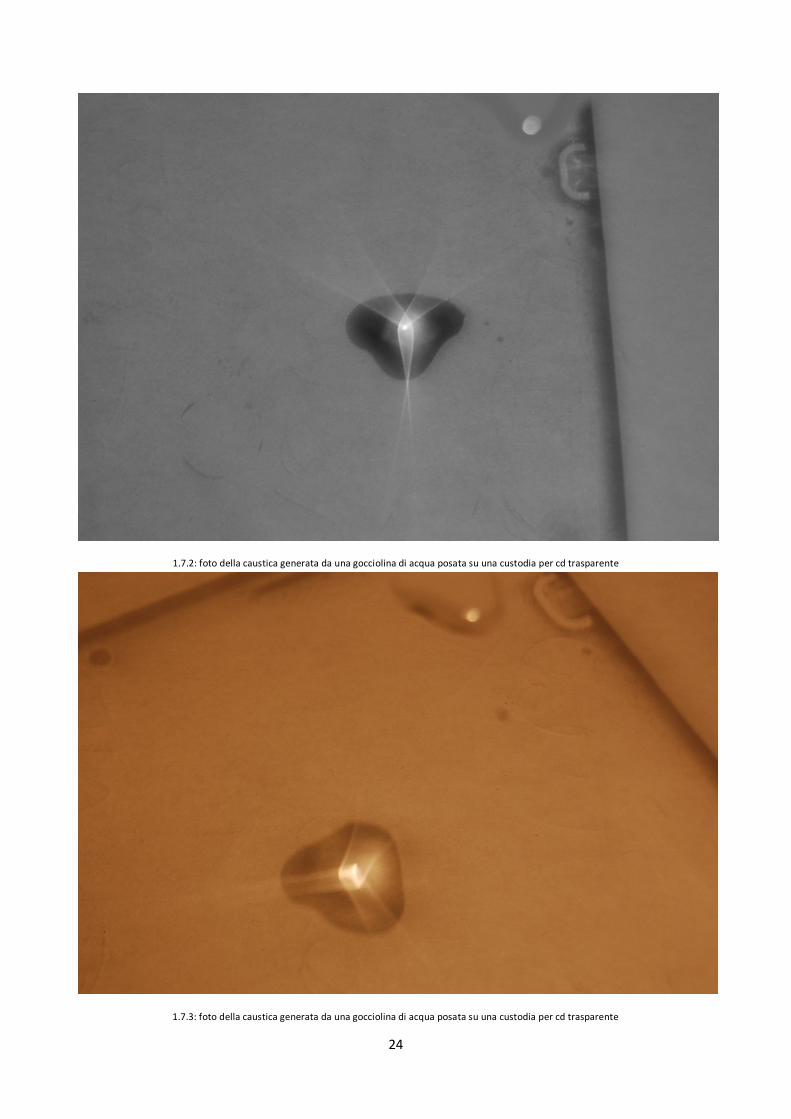
Lo stesso fenomeno si può notare nelle figure 1.7.2 e 1.7.3. Osservando come sono fatte le curve critiche vediamo che per esempio nella 1.7.2 c’è una regione dove arrivano 6 raggi: si tratta quindi di catastrofi di ordine superiore a quelle esaminate nei precedenti capitoli.
Un’altra cosa che si può osservare è che zone con lo stesso numero di raggi possono avere luminosità differente: ciò avviene perché come abbiamo detto nel paragrafo 1.2 l’intensità luminosa è inversamente proporzionale al determinante dell’Hessiano del potenziale ottico definito in quel paragrafo, e questo non è
24
1.7.2: foto della caustica generata da una gocciolina di acqua posata su una custodia per cd trasparente
1.7.3: foto della caustica generata da una gocciolina di acqua posata su una custodia per cd trasparente

25
necessariamente costante nelle varie zone. Analogamente vedremo che nelle lenti gravitazionali quando si forma più di un’immagine, queste immagini potranno avere una diversa luminosità, e talvolta alcune immagini possono essere difficili da individuare perché sono appunto troppo poco luminose.
26
2 Lenti Gravitazionali
2.1 Introduzione[2] Il fenomeno delle lenti gravitazionali è dovuto al fatto che anche la luce, come i corpi massivi, passando in un campo gravitazionale subisce una certa “attrazione” e viene deviata.
Dal punto di vista della relatività generale, questo si spiega in maniera più elegante: non è la luce ad essere attratta, è la presenza stessa del campo gravitazionale che rende lo spazio “curvo”, e non piatto, di conseguenza le geodetiche, cioè le curve più brevi che uniscono due punti dati, non sono più rette. La luce per andare da un punto all’altro passa per il percorso più breve possibile (principio di Fermat) e quindi le traiettorie dei raggi luminosi sono proprio le geodetiche, che come abbiamo detto, in presenza di un campo gravitazionale, non sono più delle rette.
Una prima conferma di questo fenomeno [2], predetto da Einstein nella Teoria della Relatività generale nel 1915, fu osservato nel 1919 quando Sir Arthur Eddington durante un eclisse solare constatò che la luce proveniente dalle stelle posizionate attorno al disco solare (come coordinate angolari) risultava deflessa della quantità predetta da Einstein (1.”74).
Gli effetti causati dalla lenti gravitazionali possono risultare utili per indagare l’universo. Infatti:
• Sono un buon sistema per individuare la materia che compone l’universo, compresa la materia oscura, cioè che non emette radiazione, e che quindi non possiamo osservare direttamente
• Sono un sistema indipendente per stimare l’età dell’universo (e quindi la costante di Hubble) • Permettono di osservare zone di universo lontane come se fossero ingrandite da un telescopio
I problemi teorici inerenti la fisica che possiamo voler cercare di risolvere sono
• Data una distribuzione di massa, calcolare le proprietà della lente • Dati gli effetti di una lente, ricavare la distribuzione di massa che la ha generata • Data una certa situazione cosmologica, usare i ritardi temporali fra le varie immagini visualizzate
per stimare la costante di Hubble
I problemi inerenti la matematica utili per la risoluzione di quanto sopra sono
• Data una distribuzione di massa, determinare un modo per contare le immagini e trovare dei limiti superiori ed inferiori al numero di immagini osservabili
• Caratterizzare le proprietà locali e generali delle curve critiche (cioè il luogo dei punti della sorgente che generano la caustica) e delle caustiche (cioè il luogo dove si può osservare un ingrandimento teoricamente infinito)
• Dato un insieme di caustiche, determinare delle restrizioni sulle caratteristiche della distribuzione di massa che genera la lente
Il secondo di questi problemi matematici ha soluzione nel già citato teorema di Thom sulle caustiche.
Possiamo distinguere i fenomeni di lenti gravitazionali in 3 categorie: Micro Lensing, Weak Lensing e Strong Lensing: nel Micro Lensing la massa deflettente è approssimativamente puntiforme, e non è molto grande: per esempio può essere il caso di un buco nero o di un quasar: in questo caso si formano 2 immagini poco
27
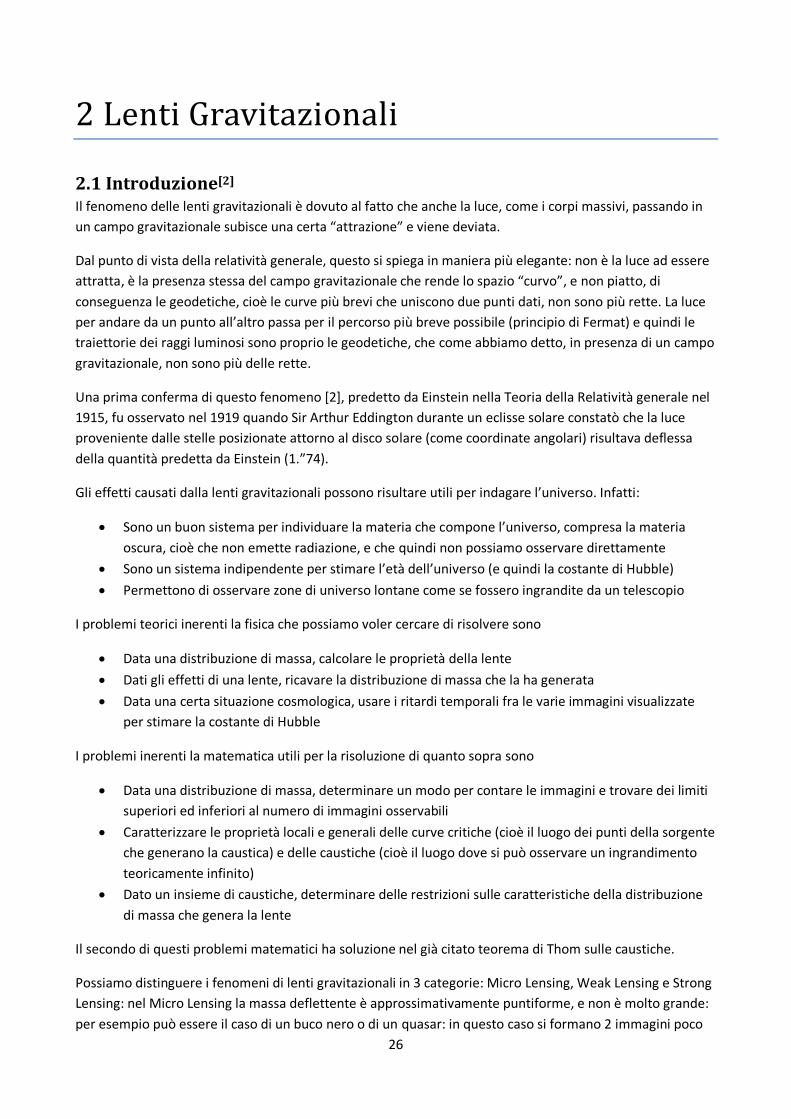
distorte. Nel Weak Lensing invece la massa deflettente non è puntiforme ma è una distribuzione di massa, anche se non molto densa, come può essere ad esempio una galassia : in questo caso non si formeranno immagini multiple, ma l’immagine subisce delle distorsioni. Infine nello Strong Lensing la massa deflettente è una distribuzione di massa abbastanza densa, come può essere un ammasso di galassie, e vengono quindi a formarsi immagini multiple. Partiremo con lo studiare il Fenomeno del MicroLensing (massa puntiforme).
2.1.1: esempio di strong lensing fotografato da Hubble[9]
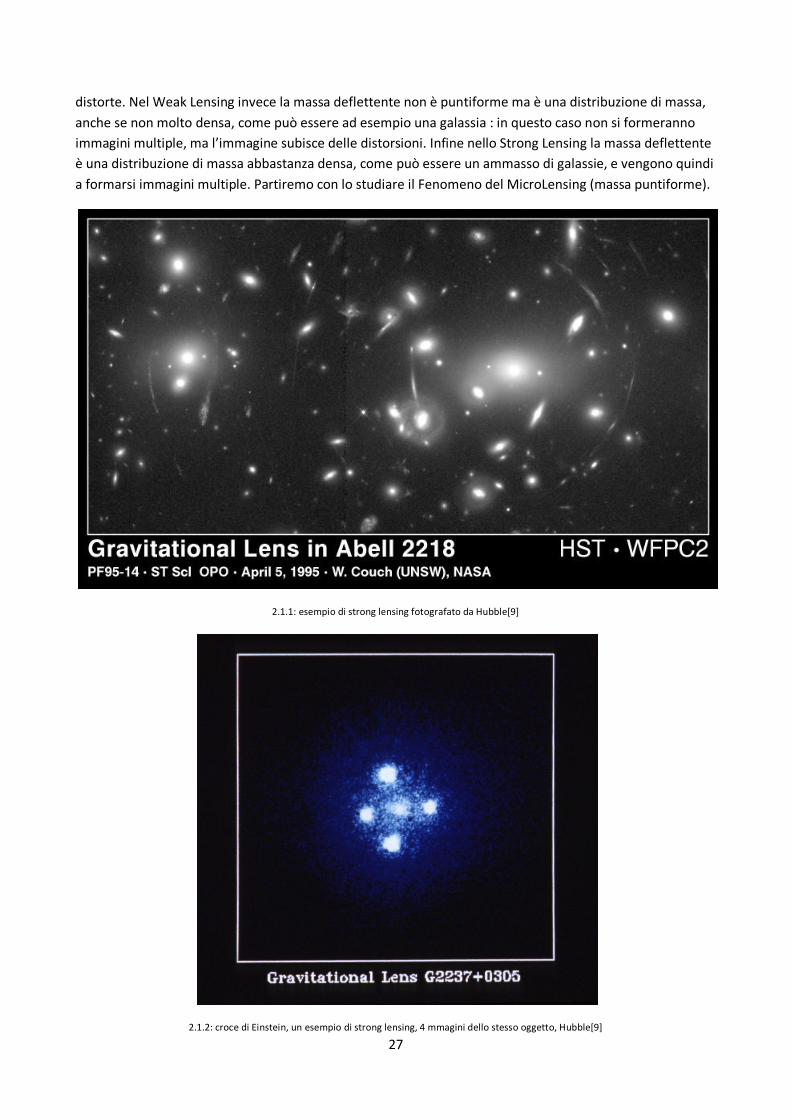
2.1.2: croce di Einstein, un esempio di strong lensing, 4 mmagini dello stesso oggetto, Hubble[9]

28
Nell’immagine 2.1.1 possiamo osservare un esempio di lensing su larga scala (macro scale lensing) generato da una distribuzione di massa estesa. Gli oggetti di cui si formano immagini multiple sono clusters di galassie. Queste immagini possono differire per luminosità, e anche per forma (può succedere che in presenza di un lensing generato da una distribuzione di massa estesa l’immagine possa venire deformata), tuttavia possiamo identificare le immagini multiple dello stesso oggetto attraverso il confronto dei vari spettri di emissione.
Nell’immagine 2.1.2 possiamo osservare un oggetto chiamato “Croce di Einstein”: possiamo vedere che sono presenti 5 immagini, dovute allo stesso oggetto astronomico. L’immagine centrale è meno luminosa delle altre, ed inoltre le varie immagini hanno forme leggermente differenti fra di loro: come vedremo, la massa deflettente per generare un tale effetto non può essere una massa puntiforme, ma è necessario che sia una distribuzione estesa. È un questo un esempio di Macro-lensing.
2.2 Calcolo della deflessione in Relatività Generale[6] Allo spazio in relatività generale di può associare un indice di rifrazione n ([6]Schneider at al, 1992):
𝑛 = 1 −2𝑈𝑐2
(2.2.1)
Dove 𝑈 è il potenziale gravitazionale. Questo in pratica significa che lo spazio dove è presente una massa non è più isotropo, ma è appunto curvo.
La deflessione è invece l’integrale della componente del gradiente di n perpendicolare al cammino ottico lungo il cammino ottico stesso:
𝛼 = � ∇��⃗ n ∙ dl���⃗𝑜𝑠𝑠𝑒𝑟𝑣𝑎𝑡𝑜𝑟𝑒
𝑠𝑜𝑟𝑔𝑒𝑛𝑡𝑒=
2𝑐2� ∇��⃗ U ∙ dl���⃗𝑜𝑠𝑠𝑒𝑟𝑣𝑎𝑡𝑜𝑟𝑒
𝑠𝑜𝑟𝑔𝑒𝑛𝑡𝑒 (2.2.2)
Per piccole deflessioni il percorso è approssimativamente rettilineo, e nel caso di parametro di impatto b si ha che il potenziale vale
𝑈 = −𝐺𝑀
(𝑧2 + 𝑏2)12
(2.2.3)
E il suo gradiente vale
∇��⃗ U =𝐺𝑀𝑏�̂�
(𝑧2 + 𝑏2)32
(2.2.4)
Mentre il percorso di integrazione è x, y costanti e z da −∞ a +∞, quindi
𝛼 =2𝑐2�
𝐺𝑀𝑏
(𝑧2 + 𝑏2)32∙ dz =
+∞
−∞ 2𝐺𝑀𝑏𝑐2
�𝑑𝑧
(𝑧2 + 𝑏2)32
+∞
−∞=
4𝐺𝑀𝑏𝑐2
(2.2.5)
Pari al doppio previsto dalla meccanica classica. Ciò si verifica perché in meccanica classica spazio e tempo sono divisi, invece in relatività spazio e tempo sono interconnessi. Le particelle a massa nulla seguono geodetiche di lunghezza nulla:
𝑑𝑠2 = 𝑔00𝑐2𝑑𝑡2 − 𝑔11𝑑𝑥2 = 0 (2.2.6)

29
E quindi
𝑑𝑥𝑑𝑡
=𝑑𝜔𝑑𝑘
= 𝑐�𝑔00𝑔11
≈ 𝑐��1 +2𝑈𝑐2�2
= 𝑐 �1 +2𝑈𝑐2� (2.2.7)
A questo punto è doveroso fare però una precisazione: abbiamo attribuito allo spazio un certo indice di rifrazione, come se fosse un mezzo materiale. Questa analogia però è solo geometrica: infatti la luce che passa in un mezzo materiale viene in parte assorbita a causa dell’interazione dei campi elettrico e magnetico con le particelle costituenti il mezzo materiale stesso. Al contrario la luce che passa in uno spazio curvo non subisce dispersioni: il campo gravitazionale è conservativo, e il fotone che parte da −∞ quando arriverà a +∞ avrà la stessa energia di quello di partenza, e lo stesso modulo dell’impulso (scattering elastico). Per questo si ha che la lente gravitazionale non cambia la 𝜔 del fotone, e quindi non cambia lo spettro della radiazione che riceviamo. Se si formano più immagini, queste hanno quindi tutte lo stesso spettro, che rispetto allo spettro della sorgente luminosa può differire solo per un redshift cosmologico, uguale per tutte le immagini e indipendente dal cammino percorso. Tuttavia, se i raggi luminosi che formano un’immagine nel giungere a noi passano attraverso un corpo assorbente, potremo notare nello spettro di tale immagine delle righe di assorbimento mancanti negli spettri delle altre immagini. Questo può darci informazioni sulla composizione del corpo che tale luce ha attraversato.
2.3 Massa puntiforme: calcolo della deflessione e degli effetti della lente[1] Per una massa puntiforme M e parametro di impatto b si ottiene un angolo di deflesisone
𝛼 =4𝐺𝑀𝑏𝑐2
(2.3.1)
Mettiamoci ora nel caso di un fronte d’onda proveniente da una sorgente posta a distanza infinita rispetto alla massa puntiforme deflettente: il fronte d’onda in arrivo sarà allora piatto (quando è ancora molto lontano dalla massa). Oltrepassata la massa invece, (sempre molto lontano da essa) ogni raggio di luce avrà subito una deviazione pari circa a quella subita lungo tutto il percorso, si avrà allora che (lavorando in coordinate cilindriche):
𝜕𝑓𝜕𝑟
= 𝑇𝑔(𝛼) = 𝑇𝑔 �4𝐺𝑀𝑐2𝑟
� ≅4𝐺𝑀𝑐2𝑟
(2.3.2)
Da cui si ricava la forma del fronte d’onda (lontano dall’origine, perché siamo sempre nell’ipotesi di piccole deflessioni):
𝑓 =4𝐺𝑀𝑐2
ln(|𝑟|) (2.3.3)
30
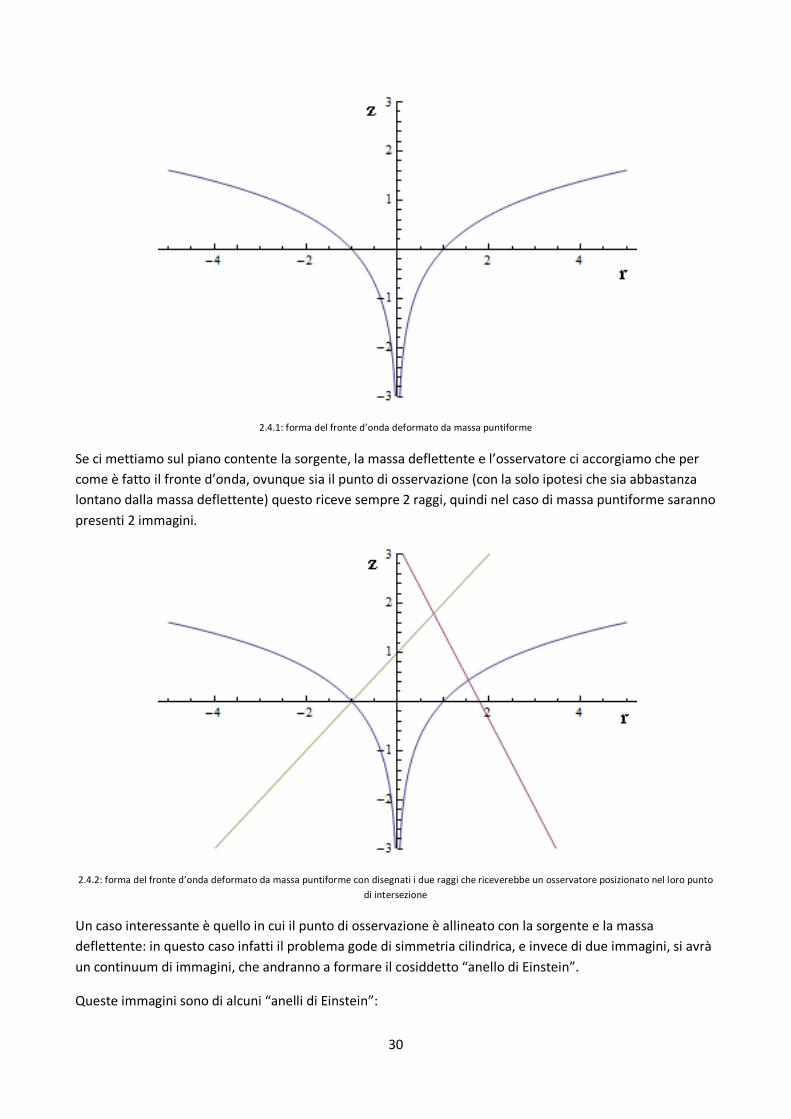
2.4.1: forma del fronte d’onda deformato da massa puntiforme
Se ci mettiamo sul piano contente la sorgente, la massa deflettente e l’osservatore ci accorgiamo che per come è fatto il fronte d’onda, ovunque sia il punto di osservazione (con la solo ipotesi che sia abbastanza lontano dalla massa deflettente) questo riceve sempre 2 raggi, quindi nel caso di massa puntiforme saranno presenti 2 immagini.
2.4.2: forma del fronte d’onda deformato da massa puntiforme con disegnati i due raggi che riceverebbe un osservatore posizionato nel loro punto di intersezione
Un caso interessante è quello in cui il punto di osservazione è allineato con la sorgente e la massa deflettente: in questo caso infatti il problema gode di simmetria cilindrica, e invece di due immagini, si avrà un continuum di immagini, che andranno a formare il cosiddetto “anello di Einstein”.
Queste immagini sono di alcuni “anelli di Einstein”:
31
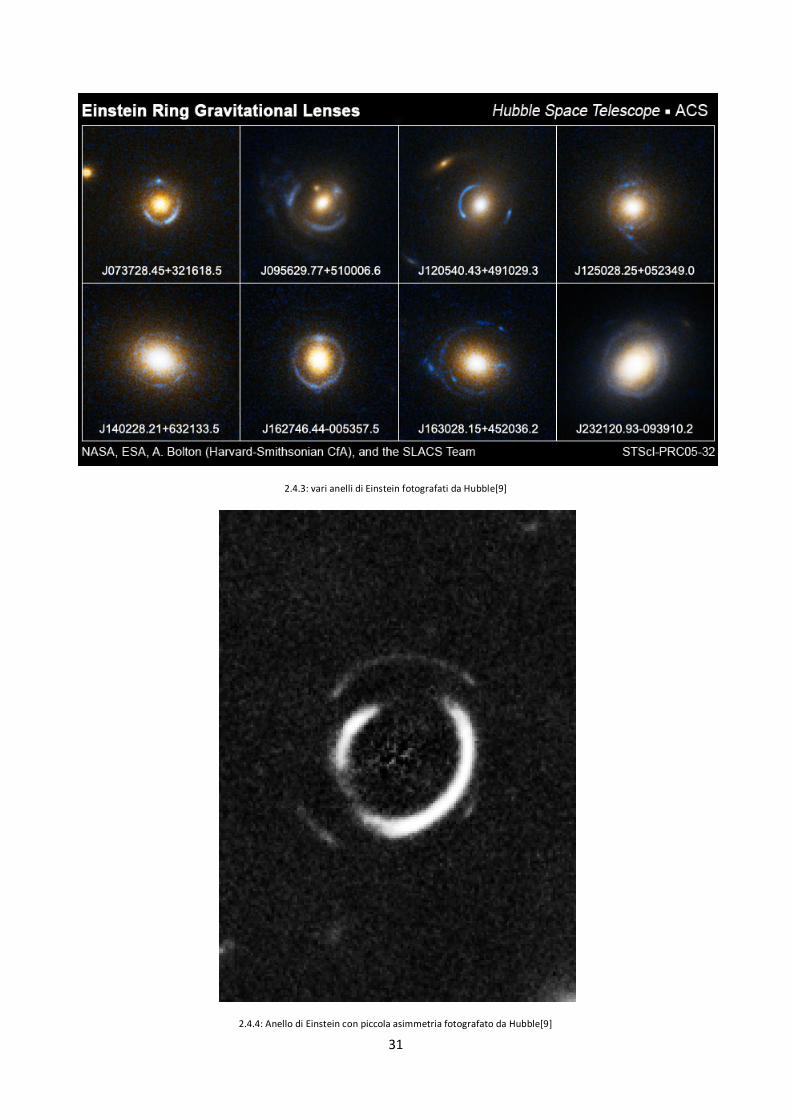
2.4.3: vari anelli di Einstein fotografati da Hubble[9]
2.4.4: Anello di Einstein con piccola asimmetria fotografato da Hubble[9]

32
Alcuni degli anelli dell’immagine 2.4.3 e la figura 2.4.4 in particolare, ci fanno capire cosa succede se invece di una perfetta simmetria cilindrica abbiamo una piccola asimmetria, cioè se l’osservatore invece di essere esattamente sull’asse z è leggermente spostato: l’anello non sparisce completamente ma viene in parte distorto e alcune zone risultano meno luminose di altre.
2.4 Massa non puntiforme: effetti dovuti a distribuzioni di massa non uniformi Nel caso di distribuzioni di massa estese e non uniformi, ma a simmetria sferica, la deflessione sarà sempre
𝛼 =4𝐺𝑀(𝑏)𝑏𝑐2
(2.4.1)
Dove però ora 𝑀 è diventata funzione di 𝑏 in quanto è la massa contenuta all’interno della sfera di raggio 𝑏 (con centro nel centro di simmetria della distribuzione).
Quindi la funzione 𝛼(𝑏) potrà non essere più monotona decrescente, ma avere vari massimi e minimi. Di conseguenza potranno esserci più raggi che hanno una deflessione tale da passare per un certo punto, e non più soltanto 2 come nel caso della massa puntiforme. Questo è il punto di connessione con la teoria delle catastrofi: così una distribuzione di massa non uniforme ed estesa 𝑀(𝑏) potrà modificare il fronte d’onda in modo tale da poter avere zone dello spazio dove arrivano più immagini, cioè da dargli la forma necessaria a creare una caustica, e la teoria delle catastrofi analizza e classifica appunto le varie caustiche e la loro topologia.
33
3 Appendice
3.1 Hyperbolic Umbilic[1] Il potenziale generico per ottenere l’ombelico iperbolico è
𝜑(𝑥,𝑦,𝑎, 𝑏, 𝑐) = 𝑥3 + 𝑥𝑦2 + 𝑐(𝑥2 + 𝑦2) + 𝑏𝑦 + 𝑎𝑥 (3.1.1)
Le condizioni sono
𝜑𝑥 = 0,𝜑𝑦 = 0,𝜑𝑥𝑥𝜑𝑦𝑦 − 𝜑𝑥𝑦2 = 0 (3.1.2)
e danno
3𝑥2 + 𝑦2 + 2𝑐𝑥 + 𝑎 = 0, 2𝑥𝑦 + 2𝑐𝑦 + 𝑏 = 0, (6𝑥 + 2𝑐)(2𝑥 + 2𝑐) − (2𝑦)2 = 0 (3.1.3)
�𝑥 + 𝑐3�
2
� 1√3�2 +
𝑦2
12=𝑐2
3− 𝑎, 𝑦 = −
𝑏2(𝑥 + 𝑐) ,
�𝑥 + 23 𝑐�
2
� 1√3�2 −
𝑦2
12=𝑐2
3 (3.1.4)
Queste equazioni, fissati i parametri a,b,c, determinano rispettivamente un ellisse con assi paralleli agli assi x,y, un iperbole con gli asindoti paralleli agli assi x,y e un iperbole con gli asindoti inclinati di 45 gradi rispetto agli assi x,y.
Analizziamo intanto le prime due equazioni: due coniche di questo tipo potranno avere o 0 punti di intersezione, o una intersezione doppia, o due punti di intersezione disgiunti, o due punti di intersezione disgiunti e un’intersezione doppia, o 4 punti di intersezione disgiunti, o due intersezioni doppie. A ogni intersezione corrisponde un raggio, quindi si avranno le intersezioni doppie quando sarà vera anche la terza equazione, cioè quando saremo sulla caustica (poiché è nelle intersezioni doppie che per piccole variazione dei parametri il numero dei raggi osservabili cambia di 2).
Per parametrizzare la superficie calcoliamo anche le derivate in x e y:
𝜑𝑥(𝑥,𝑦, 𝑎, 𝑏, 𝑐) = 3𝑥2 + 𝑦2 + 2𝑐𝑥 + 𝑎 = 0 𝑎 = −(3𝑥2 + 𝑦2 + 2𝑐𝑥) (3.1.5)
𝜑𝑦(𝑥,𝑦,𝑎, 𝑏, 𝑐) = 2𝑥𝑦 + 2𝑐𝑦 + 𝑏 = 0 𝑏 = −(2𝑥𝑦 + 2𝑐𝑦) (3.1.6)
𝜑𝑥𝑥(𝑥,𝑦,𝑎, 𝑏, 𝑐) = 6𝑥 + 2𝑐 = 𝑝 (3.1.7)
𝑥 =𝑝 − 2𝑐
6 𝑦2 =
𝑝4�𝑝 + 4𝑐
3� (3.1.8)
𝑎 = −3 �𝑝 − 2𝑐
6�2
−𝑝4𝑝 + 4𝑐
3− 2𝑐 �
𝑝 − 2𝑐6
� = −16𝑝2 −
13𝑐𝑝 +
13
𝑐2 (3.1.9)
𝑏 = ±2�𝑝4𝑝 + 4𝑐
3�𝑝 + 4𝑐
6� (3.1.10)
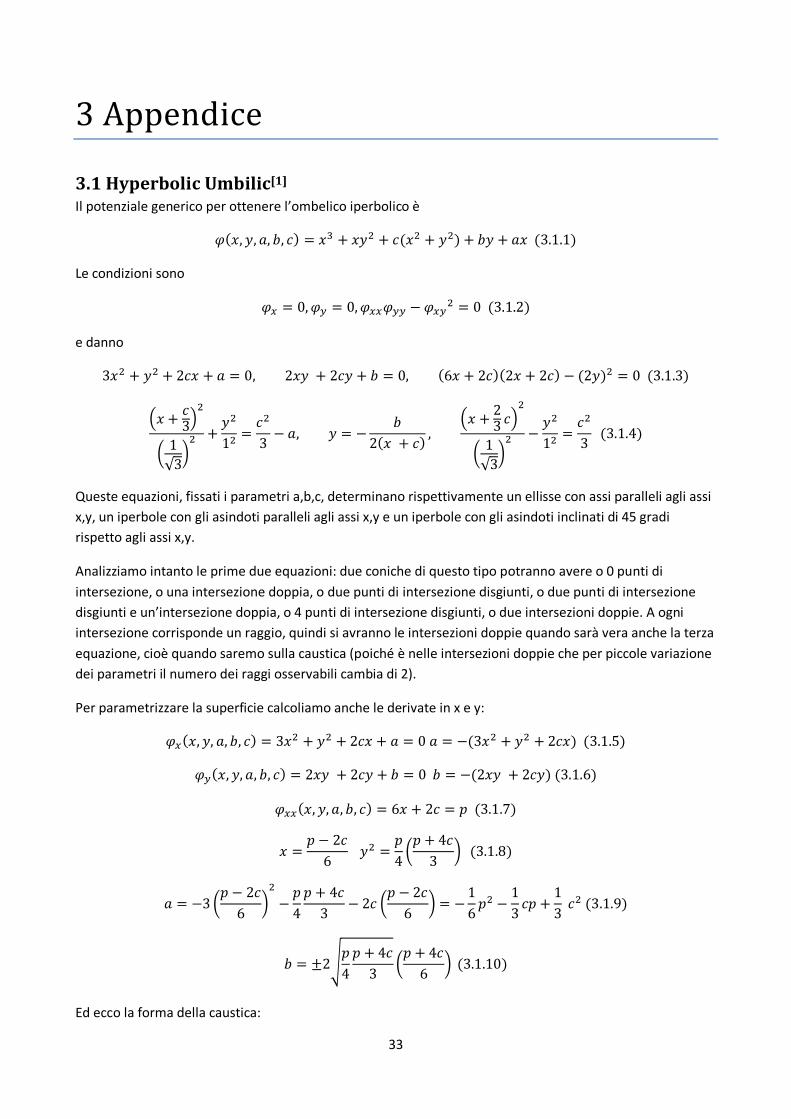
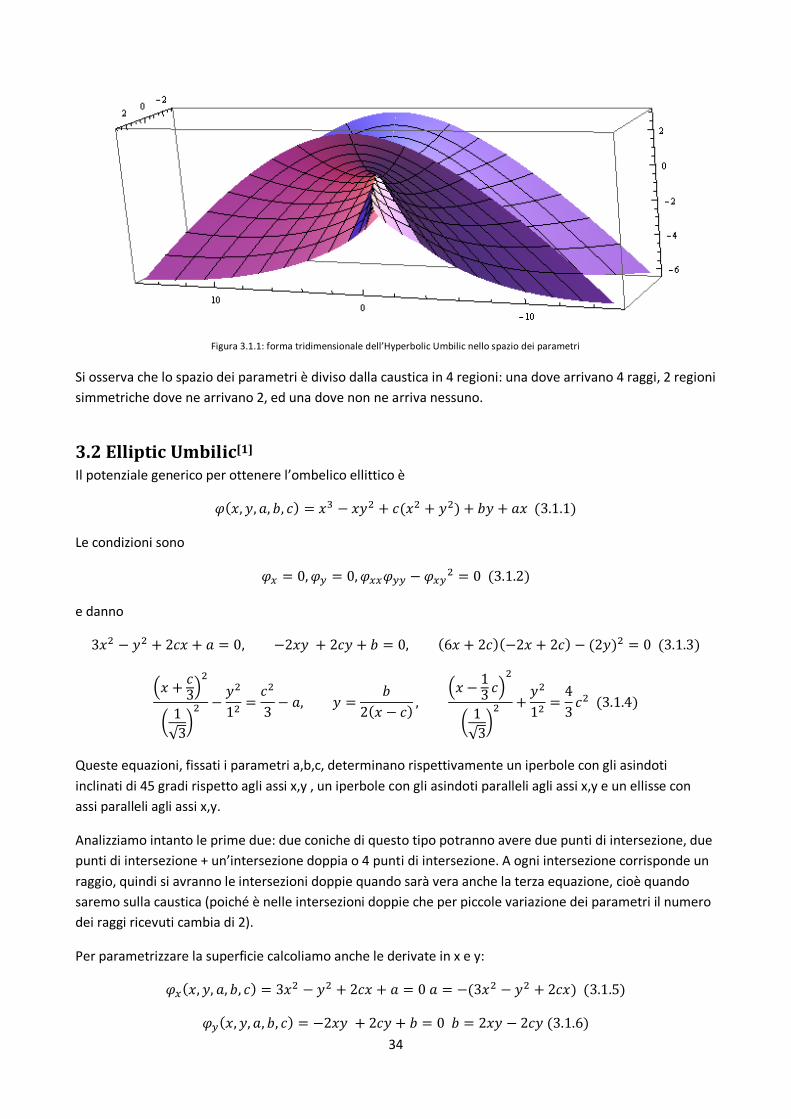
Ed ecco la forma della caustica:
34
Figura 3.1.1: forma tridimensionale dell’Hyperbolic Umbilic nello spazio dei parametri
Si osserva che lo spazio dei parametri è diviso dalla caustica in 4 regioni: una dove arrivano 4 raggi, 2 regioni simmetriche dove ne arrivano 2, ed una dove non ne arriva nessuno.
3.2 Elliptic Umbilic[1] Il potenziale generico per ottenere l’ombelico ellittico è
𝜑(𝑥,𝑦,𝑎, 𝑏, 𝑐) = 𝑥3 − 𝑥𝑦2 + 𝑐(𝑥2 + 𝑦2) + 𝑏𝑦 + 𝑎𝑥 (3.1.1)
Le condizioni sono
𝜑𝑥 = 0,𝜑𝑦 = 0,𝜑𝑥𝑥𝜑𝑦𝑦 − 𝜑𝑥𝑦2 = 0 (3.1.2)
e danno
3𝑥2 − 𝑦2 + 2𝑐𝑥 + 𝑎 = 0, −2𝑥𝑦 + 2𝑐𝑦 + 𝑏 = 0, (6𝑥 + 2𝑐)(−2𝑥 + 2𝑐) − (2𝑦)2 = 0 (3.1.3)
�𝑥 + 𝑐3�
2
� 1√3�2 −
𝑦2
12=𝑐2
3− 𝑎, 𝑦 =
𝑏2(𝑥 − 𝑐) ,
�𝑥 − 13 𝑐�
2
� 1√3�2 +
𝑦2
12=
43𝑐2 (3.1.4)
Queste equazioni, fissati i parametri a,b,c, determinano rispettivamente un iperbole con gli asindoti inclinati di 45 gradi rispetto agli assi x,y , un iperbole con gli asindoti paralleli agli assi x,y e un ellisse con assi paralleli agli assi x,y.
Analizziamo intanto le prime due: due coniche di questo tipo potranno avere due punti di intersezione, due punti di intersezione + un’intersezione doppia o 4 punti di intersezione. A ogni intersezione corrisponde un raggio, quindi si avranno le intersezioni doppie quando sarà vera anche la terza equazione, cioè quando saremo sulla caustica (poiché è nelle intersezioni doppie che per piccole variazione dei parametri il numero dei raggi ricevuti cambia di 2).
Per parametrizzare la superficie calcoliamo anche le derivate in x e y:
𝜑𝑥(𝑥,𝑦, 𝑎, 𝑏, 𝑐) = 3𝑥2 − 𝑦2 + 2𝑐𝑥 + 𝑎 = 0 𝑎 = −(3𝑥2 − 𝑦2 + 2𝑐𝑥) (3.1.5)
𝜑𝑦(𝑥,𝑦,𝑎, 𝑏, 𝑐) = −2𝑥𝑦 + 2𝑐𝑦 + 𝑏 = 0 𝑏 = 2𝑥𝑦 − 2𝑐𝑦 (3.1.6)

35
𝜑𝑥𝑥(𝑥,𝑦,𝑎, 𝑏, 𝑐) = 6𝑥 + 2𝑐 = 𝑝 (3.1.7)
𝑥 =𝑝 − 2𝑐
6 𝑦2 =
𝑝4�
8𝑐 − 𝑝3
� (3.1.8)
𝑎 = −3 �𝑝 − 2𝑐
6�2
+𝑝4
8𝑐 − 𝑝3
− 2𝑐 �𝑝 − 2𝑐
6� = −
16𝑝2 +
23𝑐𝑝 +
13
𝑐2 (3.1.9)
𝑏 = ±2�𝑝4
8𝑐 − 𝑝3
�8𝑐 − 𝑝
6� (3.1.10)
Ed ecco la forma della caustica:
Figura 3.2.1: forma tridimensionale dell’Elliptic Umbilic nello spazio dei parametri
In questo caso si osserva che lo spazio dei parametri è diviso in 3 regioni: una regione con due raggi e due regioni con 4 raggi.
36
Bibliografia 1) Nye, J.F., 1999, “Natural Focusing and Fine Structure of Light” (Bristol and Philadelphia: Institute of
Physics Publishing) 2) Petters A.O., Levine H., Wambsganss J., 2001, “Singularity Theory and Gravitational Lensing”
(Birkhauser) 3) Paczynski B., 1996, Ann Rev of Astr and Ap, 34, 419-459, “Gravitational Lensing in the local group” 4) Blandford R.D., Kochanek C.S., Kovner I., Narayan R.K., 1989, Science, 245, 824, “Gravitational Lens
Optics” 5) Berry M.V., 1985, Prometheus, 1, 41-79, “Ipotesi di Scala e Fluttuazioni non gaussiane nella teoria
catastrofica delle onde” , eds. Paolo Bisogno, Augusto forti, traduzione italiana di “Scaling and nongaussian fluctuations in the catastrophe theory of waves”
6) Schneider P., Ehlers J., Falco H., 1992, “Gravitational Lenses” (Berlin: Springer-Verlag) 7) Berry M.V., 1976, Advances in Physics, 25, 1-26, “Waves and Thom’s theorem” 8) Berry M. V., Upstill C., 1980, Progress in optics, 18, 257-271, “Catastrophe optics: morphologies of
caustics and their diffraction patterns” 9) Hubblesite.org, Gravitational lensing