ubiquity robotics
TRANSCRIPT
The Ubiquity Robotics Platform
Using Open Source Software for Domestic Robot Research and Development
Presented by: Alan Federman, et al.for
HBRC
What would you do with your own personal robot?
Ubiquity Robotics
Why?
A widely available affordable, adaptable and capable developers platform would
bring about a new age of personal/domestic robots.
Ubiquity Robotics
About thirty years ago, ‘personal’ computers became affordable. We’ve been waiting patiently for the advent of ‘personal’ robots. We are done waiting.

You can’t buy a general purpose personal robot today.
Developer Platforms or single purpose.
1.5k 40k 400k
Ubiquity Robotics
We want Rosie or R2D2...
Ubiquity Robotics
..but we have Roomba or Turtlebot. Neither are very capable. What we need now is a developers platform that is both adaptable and capable.
Hardware is difficult.Software is even more of a challenge.Fortunately, Willow Garage developed
software called ROS – Robot Operating System
Ubiquity Robotics
The Dilemma:
What is ROS?
Ubiquity Robotics
•A Distributed, Modular Design•A Vibrant Community•Permissive Licensing•A Collaborative Environment
Open source Linux based, recent Indigo version tuned for Ubuntu 14.04, module update via apt-get. Catkin build system for adding custom code in Python, C+, Java. Works on ARM (BBB, Jetson, Android, Raspberry Pi 2.
ROS is an “OS”
Ubiquity Robotics
What does that mean? As there was no ‘Google’ until there was a browser and an http server – widespread use of autonomous robots require an OS infrastructure. For personal computers we had CP/M, and then MS-DOS.
ROS has a steep learning curve, but the work load for developers is reduced considerably, and the complexity is transparent to the end user.
ROS Standard Robot Messages
Ubiquity Robotics
•Standard Message Definitions for Robots•Robot Geometry Library•Robot Description Language•Preemptable Remote Procedure Calls•Diagnostics•Pose Estimation•Localization•Mapping•Navigation
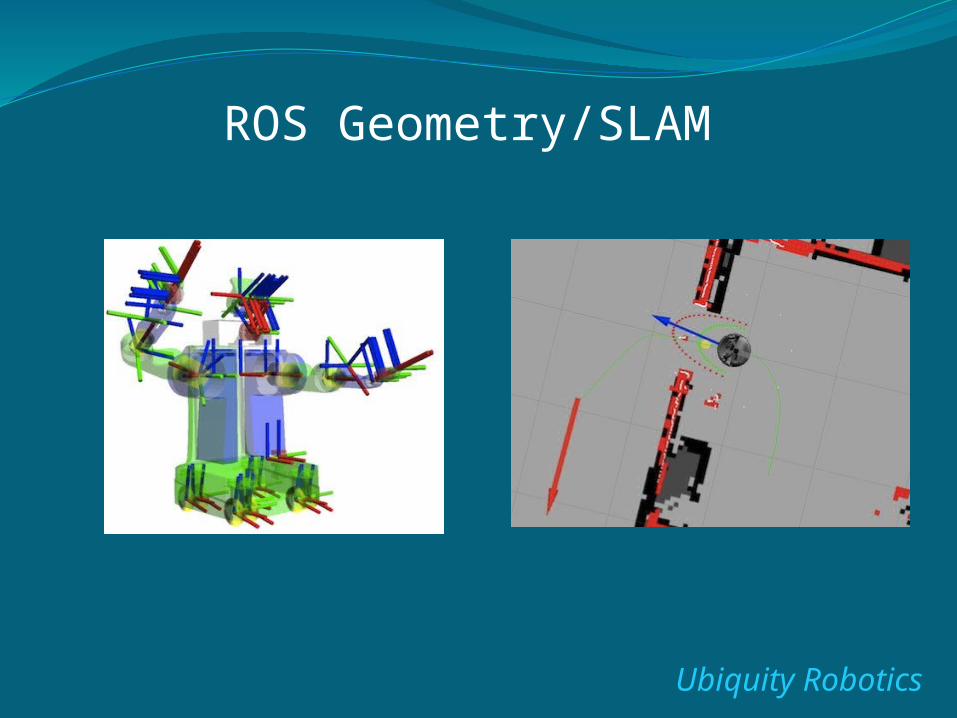
ROS Geometry/SLAM
Ubiquity Robotics
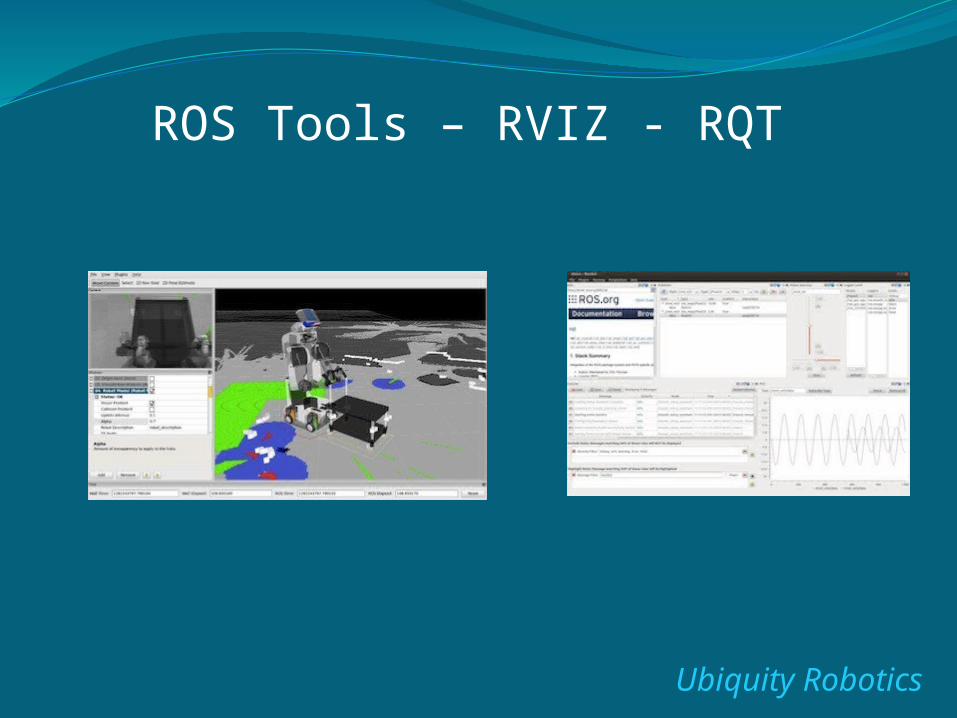
ROS Tools – RVIZ - RQT
Ubiquity Robotics
ROS – 1000s of users, but few entry level platforms.
• Southwest Research Institute (SwRI)• Skybotix• Aldebaran’s NAO humanoid• Meka Robotics' systems• Murata
Why launch now?
Ubiquity Robotics
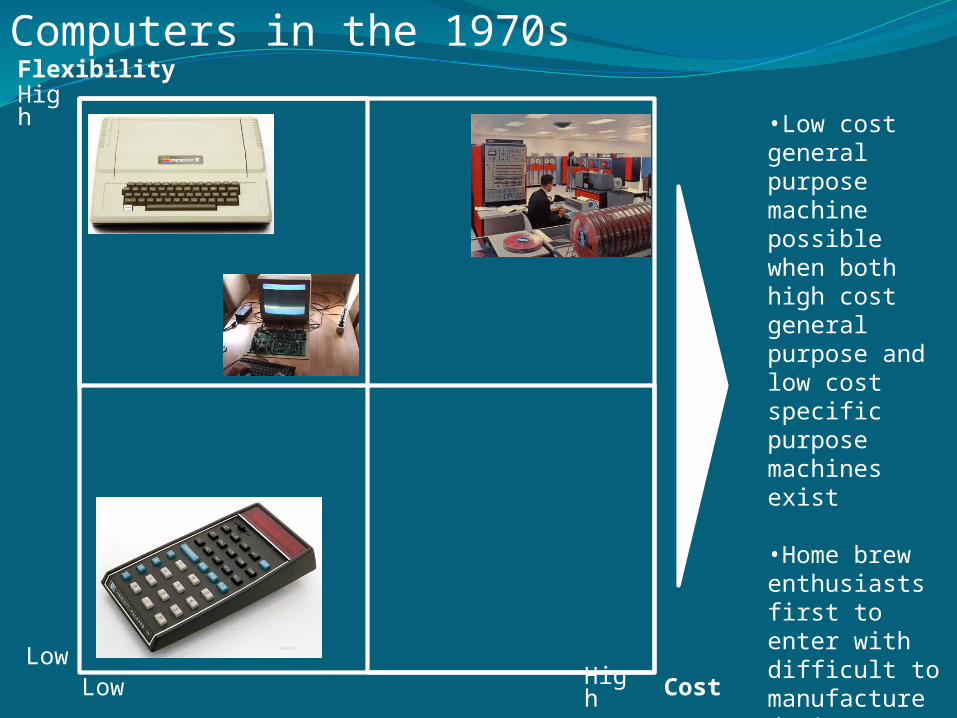
Computers in the 1970sFlexibility
CostHigh
High
LowLow
•Low cost general purpose machine possible when both high cost general purpose and low cost specific purpose machines exist
•Home brew enthusiasts first to enter with difficult to manufacture designs
•Opportunity exists for low cost general purpose mass producible design
?
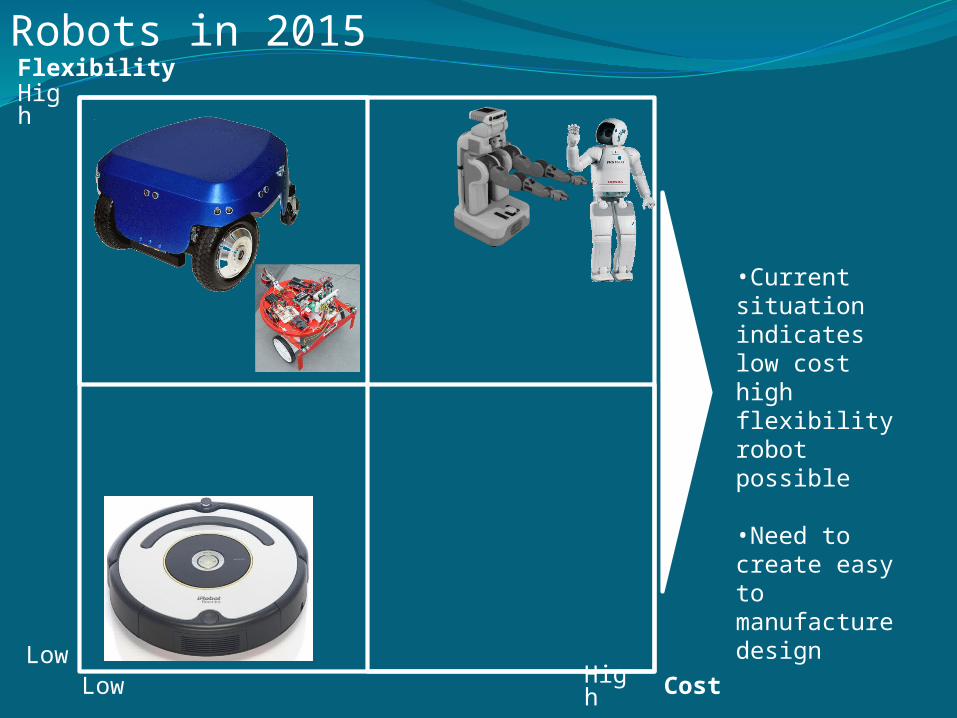
Robots in 2015Flexibility
CostHigh
High
LowLow
•Current situation indicates low cost high flexibility robot possible
•Need to create easy to manufacture design
How?
• Open source software (ROS)• Advanced COTS technology• Agile methodology (Trello, Slack,
Github)• Product designed around the existing
supply chain, not vice versa.
Ubiquity Robotics
What?
‘Magni*’ Robotics Platform• 100 lb payload• 8 hours endurance• navigate in ADA compliant space• widely adaptable for useful work• affordable
*Magni was originally called Hercules.
Ubiquity Robotics
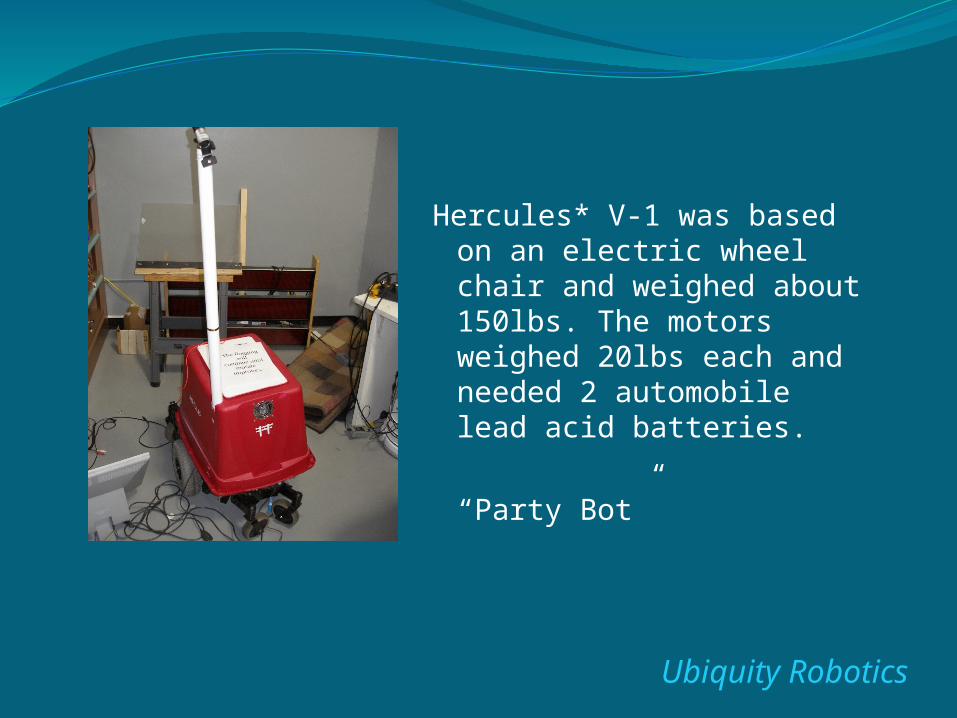
Hercules* V-1 was based on an electric wheel chair and weighed about 150lbs. The motors weighed 20lbs each and needed 2 automobile lead acid batteries.
“Party Bot”
Ubiquity Robotics
Ubiquity Robotics
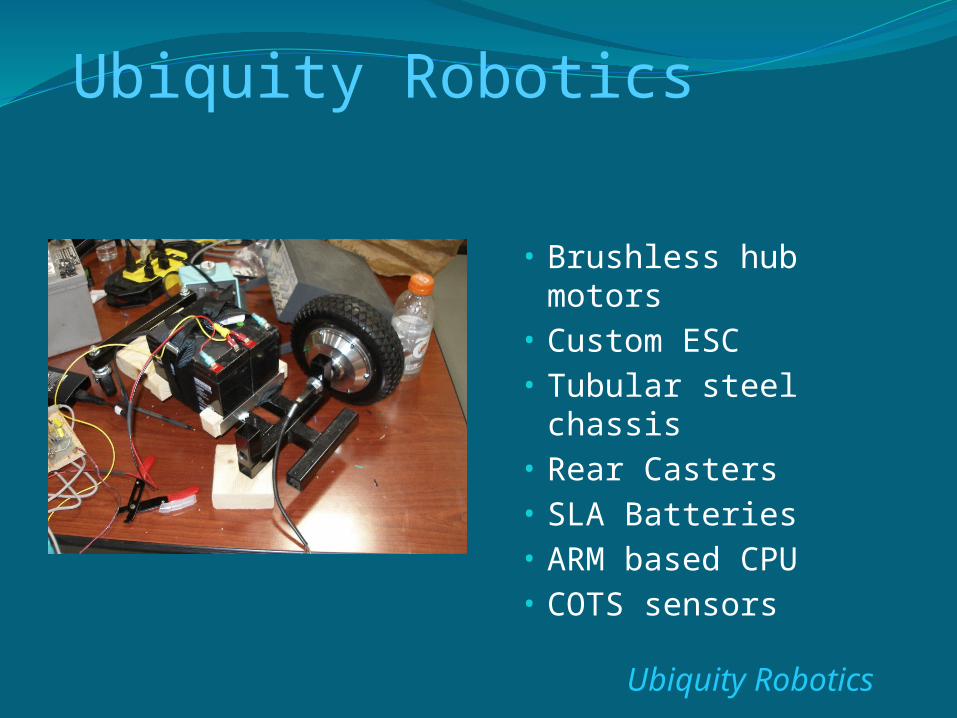
• Brushless hub motors
• Custom ESC• Tubular steel
chassis• Rear Casters• SLA Batteries• ARM based CPU• COTS sensors
Ubiquity Robotics

Navigation:Room Mapping/Location – obstacle avoidance- route planning - SLAM
Ubiquity Robotics
CPUs
• Laptops/PCs• Raspberry Pi• Beaglebone Black• Radxa Rock• Jetson TK1• Raspberry Pi II
Sensors
• XV-11 LDS•Kinect•Point Grey•Sonar Array• ARS Advanced Room Sensor•Future ‘Lidar’ ‘3-D Camera’
Ubiquity Robotics
ROS ‘Hercules*’ Specific Nodes
Ubiquity Robotics
•hercules-node•hercules-sonar-skirt•hercules-urdf•hercules-safety-controller• xv-11• point-grey• ceiling fiducials
*Magni

Marketing – Roll out plans.
First 10 Magni platforms are under construction. After video production, we plan to go forward with a crowd funding campaign raise enough capital to manufacture 300 to 1000 units.
Ubiquity Robotics
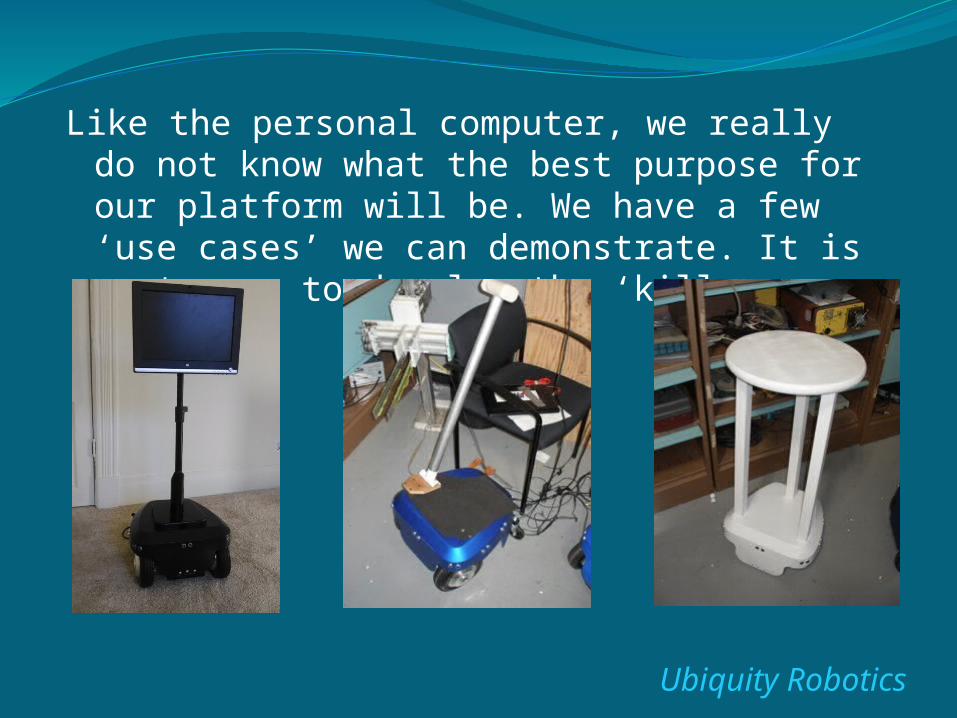
Like the personal computer, we really do not know what the best purpose for our platform will be. We have a few ‘use cases’ we can demonstrate. It is up to you to develop the ‘killer app.’
Ubiquity Robotics
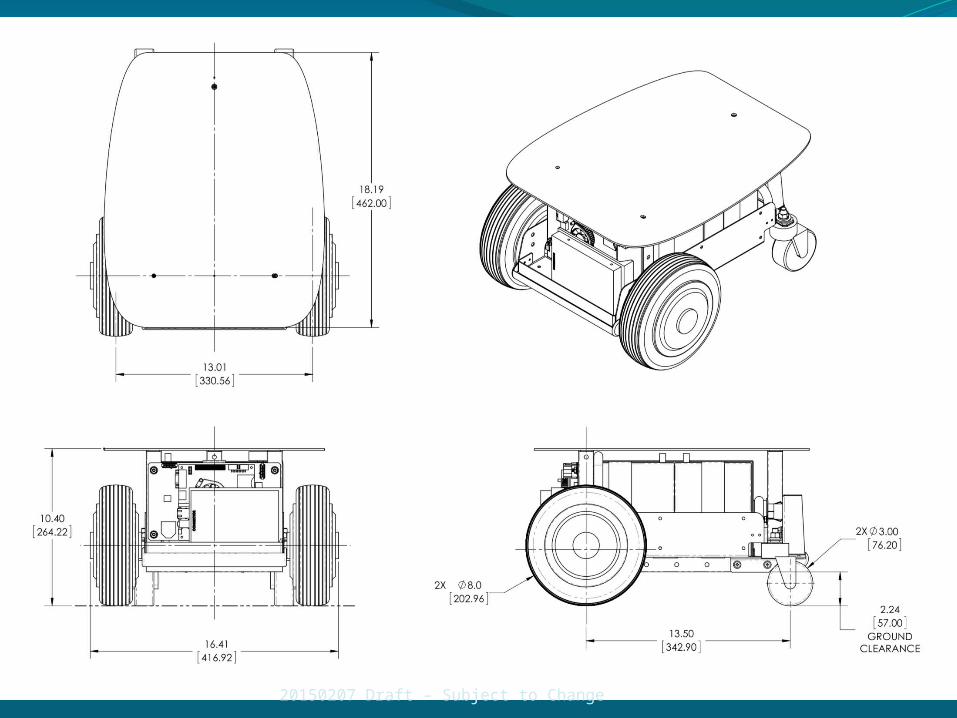
20150207 Draft – Subject to Change
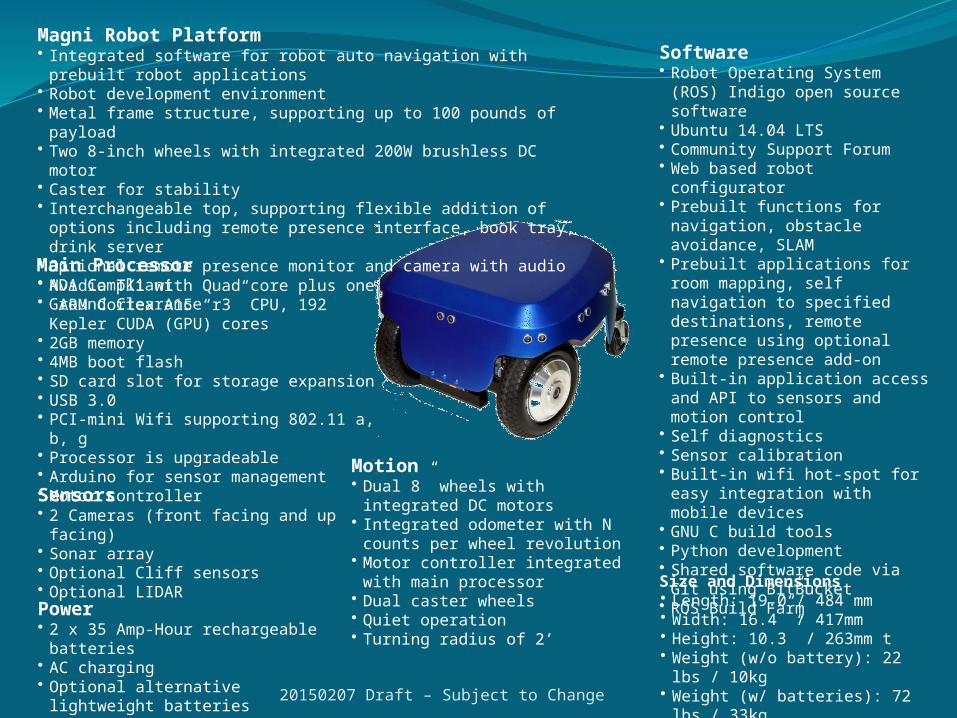
Size and Dimensions• Length: 19.0”/ 484 mm • Width: 16.4” / 417mm • Height: 10.3” / 263mm t• Weight (w/o battery): 22 lbs /
10kg• Weight (w/ batteries): 72 lbs /
33kg
Magni Robot Platform• Integrated software for robot auto navigation with prebuilt robot
applications• Robot development environment• Metal frame structure, supporting up to 100 pounds of payload• Two 8-inch wheels with integrated 200W brushless DC motor• Caster for stability• Interchangeable top, supporting flexible addition of options
including remote presence interface, book tray, drink server• Optional remote presence monitor and camera with audio• ADA Compliant• Ground ClearanceMain Processor• Nvidia TK1 with Quad core plus one
ARM Cortex A15 “r3” CPU, 192 Kepler CUDA (GPU) cores
• 2GB memory• 4MB boot flash• SD card slot for storage expansion• USB 3.0 • PCI-mini Wifi supporting 802.11 a, b, g• Processor is upgradeable• Arduino for sensor management• Motor controller
Software • Robot Operating System (ROS)
Indigo open source software• Ubuntu 14.04 LTS• Community Support Forum• Web based robot configurator• Prebuilt functions for
navigation, obstacle avoidance, SLAM
• Prebuilt applications for room mapping, self navigation to specified destinations, remote presence using optional remote presence add-on
• Built-in application access and API to sensors and motion control
• Self diagnostics• Sensor calibration• Built-in wifi hot-spot for easy
integration with mobile devices• GNU C build tools• Python development• Shared software code via Git
using BitBucket• ROS Build Farm
Motion• Dual 8” wheels with integrated
DC motors• Integrated odometer with N
counts per wheel revolution• Motor controller integrated with
main processor• Dual caster wheels• Quiet operation• Turning radius of 2’
Power• 2 x 35 Amp-Hour rechargeable
batteries• AC charging • Optional alternative lightweight
batteries
Sensors• 2 Cameras (front facing and up
facing)• Sonar array• Optional Cliff sensors• Optional LIDAR
20150207 Draft – Subject to Change
Hercules Robot Platform
Magni Robot Platforms Versions
We are still considering options for our kick starter but are considering three versions:
$ Base(Bronze) - motors, chassis, controller only
$$ Developer (Silver)- BASE plus Raspberry Pi II and navigation sensors
$$$ Shell(Gold) - DEVELOPER plus aluminum shell – near commercial application ready.
Ubiquity Robotics
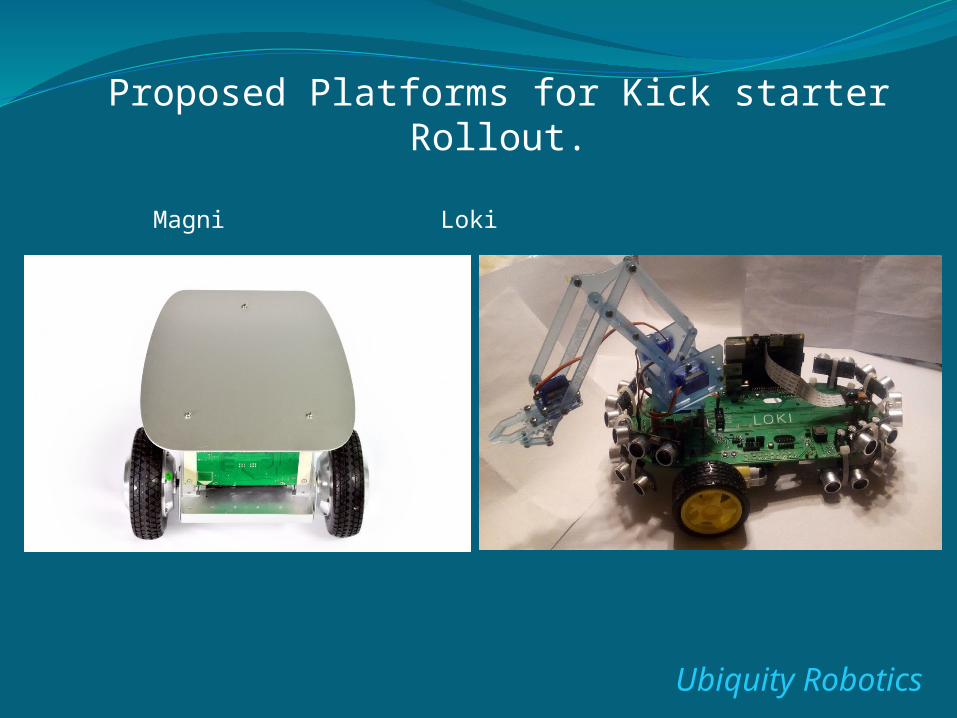
Magni Loki
Proposed Platforms for Kick starter Rollout.
Introducing: Loki
Ubiquity Robotics
Loki is a small robot used to learn ROS (Robot Operating System.) ROS runs on a Raspberry Pi 2 computer board and plugs into the Loki, controling 2 motors with drive electronics and wheel encoders, 16 sonars, a 5 mega pixel camera, a 4 degree of freedom Arm, and a 6000mAH battery. An USB wireless dongle is used to download software developed on a laptop/desktop system, or run the robot via teleop.
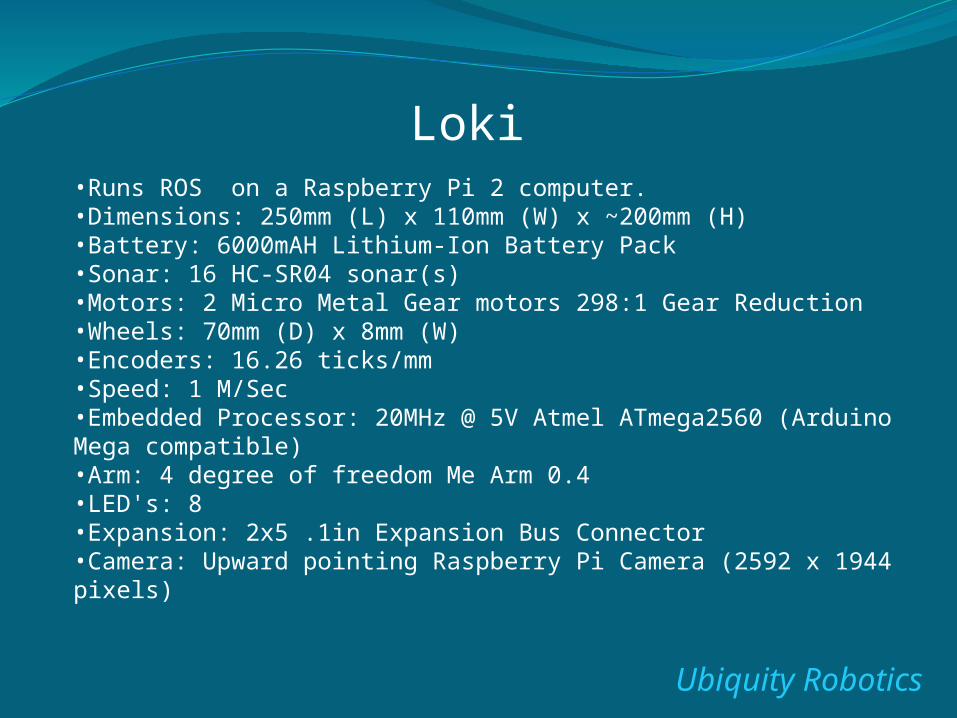
Loki
Ubiquity Robotics
•Runs ROS on a Raspberry Pi 2 computer.•Dimensions: 250mm (L) x 110mm (W) x ~200mm (H)•Battery: 6000mAH Lithium-Ion Battery Pack•Sonar: 16 HC-SR04 sonar(s)•Motors: 2 Micro Metal Gear motors 298:1 Gear Reduction•Wheels: 70mm (D) x 8mm (W)•Encoders: 16.26 ticks/mm•Speed: 1 M/Sec•Embedded Processor: 20MHz @ 5V Atmel ATmega2560 (Arduino Mega compatible)•Arm: 4 degree of freedom Me Arm 0.4•LED's: 8•Expansion: 2x5 .1in Expansion Bus Connector•Camera: Upward pointing Raspberry Pi Camera (2592 x 1944 pixels)
So our question still is:
What would you do with your own
personal robot?
Ubiquity Robotics