theoretische akustik - users.cms.caltech.eduusers.cms.caltech.edu/~ps/theoretische_akustik.pdf ·...
TRANSCRIPT
M. Moser
Theoretische AkustikSkript zur Vorlesung
27. Marz 2008

Nichts ist praktischer als eine (richtige) Theorie.
(nach Manfred Heckl,dem dieses Skript gewidmet ist)
Vorwort
Diese ”Theoretische Akustik“ ist mehreren Zielen verpflichtet:
• Sie versucht nicht nur, die bei der Berechnung von Schallfeldern benutztenMethoden und Verfahren aufzugreifen und an Beispielen durchzufuhren,wie z. B. die allerdings wirklich recht naheliegende Benutzung der Fourier-Transformation und der Losung gewisser Randwertprobleme.
• Sie greift daruber hinaus auch hochst prinzipielle physikalische Fragestel-lung auf (wie z. B. die Physik der Abstrahlung und die der Beugung) undversucht, diese auf ihre wesentlichen Inhalte und Substanzen hin abzuklop-fen, und dabei durfen fraglos auch die praktischen Anwendungen z. B. imSchallschutz nicht in den Hintergrund treten.
Zunachst werden sehr grundsatzliche Dinge besprochen: was ist sehr vielenakustischen Ubertrager gemeinsam, wie kommt eigentlich die Vorliebe fur dieBetrachtung harmonischer (sinusformiger) Zeitverlaufe zustande, was meinenImpulsantwort und Ubertragungsfunktion. Danach werden die Grundlagender Schallausbreitung in Gasen besprochen. Hier ist die Darstellung teilweisegerafft, weil der Stoff in anderen Lehrveranstaltungen des Verfassers ausfuhr-lich behandelt wird.
Danach wird die Abstrahlung von Ebenen betrachtet. Weil man diese aufsehr einleuchtende Prinzipien und gut zu verstehende Gesetze zuruckfuhrenkann, handelt es sich dabei sicher um ein zentrales Kapitel der Vorlesung.Auch beruhen einige praktisch recht bedeutsame Messvorschriften auf denhier erarbeiteten Sachverhalten.
Es folgt anschließend die Behandlung von Randwert-Problemen, wobei dieWellengleichung in Zylinderkoordinaten sozusagen als Beispiel benutzt wird.Anfangs wird geschildert, wie man dabei vorgeht, es steht also zunachst dasMethodische und weniger das Ergebnis im Vordergrund. Anschließend wirddas Gelernte dann allerdings auf die Beugung an Hindernissen angewendet,und diese Frage allerdings ist fur die Praxis ausgesprochen wichtig: Fast dergesamte Larmschutz an Straßen hat die Beugung an Schallschutzwanden zumphysikalischen Hintergrund, und leider, leider ist deren Wirkung arg begrenzt,
VIII Vorwort
wie das entsprechende Kapitel zeigt, das sicher als zweiter zentraler Teil derVeranstaltung angesehen werden darf.
Das ist (vielleicht schon mehr als) genug Stoff fur die ein Semester wahren-de Veranstaltung. Der Verfasser ist - mit anderen - der Meinung, dass ”Einigesklar durchdacht“ besser ist als ”Vieles oberflachlich gestreift“; weniger kannbekanntlich mehr sein.
Schließlich darf ich noch erwahnen, dass die Teilnehmer an dieser Lehrver-anstaltung nach meiner Erfahrung recht heterogen zusammengesetzt sind. Einbetrachtlicher Anteil der Horer hat sonst kaum etwa mit Akustik zu tun. Aus-drucklich sind mir auch diese Teilnehmer herzlich willkommen; ich nehme auchgerne Rucksicht, indem die fur das Verstandnis erforderlichen Voraussetzun-gen wenigstens kurz besprochen werden, so dass man der Vorlesung auch (mitder ublichen mathematischen und physikalischen ”Grundausstattung“) folgenkann. Allerdings darf ich um Verstandnis bitten, dass hier naturlich Grenzengesetzt sind. Einige Dinge mussen wirklich anderen Vorlesungen uberlassenbleiben. Warum z. B. in der Akustik Schallpegel benutzt werden, und welcheBegrundung fur die adiabatische Zustandsgleichung (in den Details) gegebenwird, das kann hier nicht alles nochmals aufgearbeitet werden.
Teile dieses Skriptes sind ubrigens auch im meinem Buch Technische Akus-tik (erschienen beim Springer Verlag in Berlin, 7.-te Auflage im Jahr 2007,etwa 600 Seiten, 8.-te Auflage geplant fur 2009) enthalten, dass auf einige dersoeben aufgeworfenen Fragen ausfuhrliche Antworten parat halt.
Dieses Skript ist so ausfuhrlich gestaltet, dass keine Mitschrift der Vorle-sung mehr notig ist; Nebenbemerkungen am Seitenrand wahrend des Horenssollten vollauf genugen. Es reicht auch zur Prufungsvorbereitung vollig aus,in der Prufung wird kein Verstandnis oder Wissen erwartet, das daruber hin-ausgeht.
Ich freue mich uber jeden Fehler, den die Leser finden, denn das hilft mir,es besser zu machen.
M. Moser
Inhaltsverzeichnis
1 Grundlagen der Ubertragungstheorie . . . . . . . . . . . . . . . . . . . . . . 11.1 Eigenschaften von Ubertragern . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.1.1 Linearitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.1.2 Zeitinvarianz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Beschreibung durch die Impulsantwort . . . . . . . . . . . . . . . . . . . . . 41.3 Das Invarianz-Prinzip . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.4 Fourier-Zerlegung. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.4.1 Fourier-Reihen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.4.2 Fourier-Transformation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.4.3 Die Ubertragungsfunktion und der Faltungssatz . . . . . . . 221.4.4 Symmetrien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241.4.5 Impulsantworten und Hilbert-Transformation . . . . . . . . . 26
1.5 Wellenleiter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2 Die akustischen Zustandsgleichungen in Gasen . . . . . . . . . . . . . 332.1 Die Zustandsgroßen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332.2 Zustandsgleichungen fur die Gesamtgroßen . . . . . . . . . . . . . . . . . 34
2.2.1 Boyle-Mariotte-Gleichung . . . . . . . . . . . . . . . . . . . . . . . . . . 342.2.2 Adiabatische Zustandsgleichung . . . . . . . . . . . . . . . . . . . . . 35
2.3 Zustandsgleichungen fur die Schallfeldgroßen . . . . . . . . . . . . . . . . 36
3 Schallfeld-Gleichungen in kartesischen Koordinaten . . . . . . . . 393.1 Folgerung aus der Massen-Erhaltung . . . . . . . . . . . . . . . . . . . . . . . 39
3.1.1 Eindimensionale Betrachtung . . . . . . . . . . . . . . . . . . . . . . . 393.1.2 Dreidimensionale Betrachtung . . . . . . . . . . . . . . . . . . . . . . 40
3.2 Folgerungen aus der Impuls-Erhaltung . . . . . . . . . . . . . . . . . . . . . 413.2.1 Eindimensionale Betrachtung . . . . . . . . . . . . . . . . . . . . . . . 413.2.2 Dreidimensionaler Fall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.3 Lighthill-Gleichung und Wellengleichung . . . . . . . . . . . . . . . . . . . . 423.3.1 Eindimensionaler Fall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.3.2 Dreidimensionaler Fall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
X Inhaltsverzeichnis
3.4 Energie und Leistung in Schallfeldern . . . . . . . . . . . . . . . . . . . . . . 46
4 Schallabstrahlung von ebenen Flachen . . . . . . . . . . . . . . . . . . . . . 494.1 Ortlich harmonische Anregung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 504.2 Allgemeine Form der Anregung. . . . . . . . . . . . . . . . . . . . . . . . . . . . 534.3 Betrachtungen im Fernfeld . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.3.1 Fernfeldbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 594.4 Spezielle eindimensionale Strahler-Anordnungen . . . . . . . . . . . . . 60
4.4.1 Die Kolbenmembran . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 604.4.2 Kurzwellige, endlich lange Strahler . . . . . . . . . . . . . . . . . . 63
4.5 Dreidimensionale Behandlung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 654.6 Spezielle (zweidimensionale) Strahler-Anordnungen . . . . . . . . . . 67
4.6.1 Die kreisformige Kolbenmembran . . . . . . . . . . . . . . . . . . . . 67
5 Randwertprobleme in Zylinderkoordinaten . . . . . . . . . . . . . . . . 735.1 Das Koordinatensystem des Kreiszylinders . . . . . . . . . . . . . . . . . . 735.2 Wellengleichung in Zylinderkoordinaten . . . . . . . . . . . . . . . . . . . . 74
5.2.1 Massenerhaltungssatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 755.2.2 Impulserhaltungssatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 765.2.3 Wellengleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
5.3 Ebene Probleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 785.3.1 Losungen der Wellengleichung . . . . . . . . . . . . . . . . . . . . . . . 785.3.2 Abstrahlung von Zylinder-Oberflachen . . . . . . . . . . . . . . . 835.3.3 Beugung an Zylindern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.4 Abschirmwande und Abschirmwalle . . . . . . . . . . . . . . . . . . . . . . . . 1005.4.1 Beugung an der schallharten Schneide . . . . . . . . . . . . . . . . 1065.4.2 Bedeutung der Hohe von Schallschutzwanden . . . . . . . . . 1215.4.3 Schallschutzwalle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1225.4.4 Absorbierende Schallschutzwande . . . . . . . . . . . . . . . . . . . . 1235.4.5 Schalldurchgang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1255.4.6 Beugung an Wanden mit aufgesetzten Zylindern . . . . . . 126
5.5 Abstrahlung und Beugung im dreidimensionalen Raum . . . . . . . 1265.6 Schallausbreitung in Rohren (Kundtsches Rohr) . . . . . . . . . . . . . 128
Literaturverzeichnis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
1
Grundlagen der Ubertragungstheorie
Alle akustischen Strukturen und Anordnungen haben eines gemeinsam: sieubertragen ein gewisses Zeitsignal und wandeln es dabei in ein anderes um.So regt z. B. ein elektrisches Signal die Lautsprecher-Membran einer Beschal-lungsanlage an, und bereits darin besteht eine Signal-verformende Anderungdes Spannungs-Zeitverlaufes in den Zeitverlauf der Membran-Schnelle. Dannkann dieses Signal weiter in jede erdenkliche ”akustische Umgebung“ abge-strahlt werden, ins Freie, in die ganze Vielfalt der denkbaren Raume mit denunterschiedlichsten Nachhallzeiten und Einrichtungen; und auch dabei wirdder Zeitverlauf der Membran-Schnelle in eine jeweils von der akustischen Um-gebung (und sogar noch vom darin betrachteten Punkt) abhangende Signal-gestalt des Schalldruck-Zeitverlaufes umgeformt.
Naturlich beschreiben die genannten Beispiele nur sehr spezielle Falle vonUbertragern. Andere Beispiele - um nur noch einige wenige zu nennen - sindFilter, Schalldampfer, Mikrophone, von Kraften zu Schwingungen angeregteStrukturen wie Platten, Stabe, Bauwerke, Brucken, Fahrzeuge, und viele an-dere. Hier, in der Theoretischen Akustik, werden nur einige ganz spezielleUbertrager und Ubertragunsgphanome behandelt werden, namlich vor al-lem Abstrahl-Vorgange von gewissen, noch halbwegs einfach behandelbarenFlachen und Beugungs-Vorgange; aber auch bei diesen handelt es sich zweifel-los um die Betrachtung und Beschreibung von Ubertragern. Grund genug, dieallgemeinen Eigenschaften und Beschreibungsmoglichkeiten von Ubertragernan den Anfang der Theoretischen Akustik zu stellen.
Allgemein soll unter einem Ubertrager (oder einem System) eine jede Ein-richtung zu verstehen sein, die aus einem zeitlichen Signal ein zweites, durchirgendeine Verformung aus dem ersten entstandenes, sogenannten Ausgangs-signal macht. Das Anregesignal x(t) wird als ”Eingangssignal“ bezeichnet undließe sich als ”Ursache“ fur einen zeitlichen Vorgang ansehen, das Ausgangs-signal y(t) konnte dann wohl auch durch den Begriff ”Wirkung“ gekennzeich-net werden. Wie man an einem konkreten Ubertrager sinnvoll Eingangssignalx(t) und Ausgangssignal y(t) wahlt, das hangt von den Gegebenheiten, demZweck der Betrachtung und durchaus auch von der Wahl des Betrachters
2 1 Grundlagen der Ubertragungstheorie
ab. Z. B. wird es gewiss sinnvoll sein, bei einem Mikrophon den anregendenSchalldruck-Zeitverlauf als Eingang und die Mikrophon-Spannung als Aus-gang aufzufassen; nichts sprache andererseits dagegen, den Strom-Zeitverlaufim elektrischen Kreis als Ausgang aufzufassen. Will man erst einmal das lokaleGeschehen bei einem Lautsprecher betrachten, dann wurde man die Spei-sespannung als Eingang und die Membranschnelle als Ausgang definieren,ebensogut ließe sich alternativ auch die Membranbeschleunigung verwenden.Interessiert auch noch die Abstrahlung, dann ware der Ausgang vernunfti-gerweise wohl das Schalldrucksignal in einem Punkt. Sollte jedoch aus irgendeinem Grund die Luftschall-Schnelle interessieren, dann ließe sich naturlichauch diese als Ausgang benutzen.
Die Operation L soll hinfort die genaue Art und Weise bezeichnen, inwelcher der Ubertrager das Eingangssignal in ein Ausgangssignal verwandelt:
y(t) = L[x(t)] . (1.1)
Dabei darf man sich jede beliebige, wohldefinierte Verformung eines ebensobeliebigen Eingangssignals x(t) zu einem Ausgang y(t) vorstellen, die durch Lbewirkt wird. Um nur ein Beispiel aus der großen, denkbaren Vielfalt heraus-zugreifen: ein entsprechendes Filter verformt z. B. ein periodisch wiederholtesDreiecksignal zu einer Sinusfunktion gleicher Frequenz.
Neben den hier schon genannten Ubertragern sei z. B. noch ein Gleich-richter genannt, von denen wir ubrigens jeder (mindestens) so viele besitzen,wie wir Gerate mit Netzanschluss unser eigen nennen. Seine Aufgabe bestehtebenfalls in einer Signalverformung, er macht namlich aus einer Wechselspan-nung (moglichst) eine Gleichspannung. Der Quadrierer ist ein nah verwandterUbertrager, er wird in Zukunft auch einmal als Beispiel zur Veranschaulichungherangezogen werden, um die im Folgenden erarbeiteten Sachverhalte zu ver-anschaulichen.
1.1 Eigenschaften von Ubertragern
1.1.1 Linearitat
Ubertrager konnen sich linear oder nichtlinear verhalten. Linear werden sol-che Systeme genannt, fur die das Prinzip der ungestorten Uberlagerung stetsangewendet werden kann, fur die also bei beliebigen Signalen x1(t) und x2(t)und beliebigen Konstanten c1 und c2
L[c1x1(t)] + L[c2x2(t)] = c1L[x1(t)] + c2L[x2(t)] (1.2)
gilt. Die Reaktion des Ubertragers auf eine Linearkombination von Signalenist gleich der Summe der Teilreaktionen. Das ”Prinzip der ungestorten Uber-lagerung“ wird auch als ”Superpositionsprinzip“ bezeichnet.
1.1 Eigenschaften von Ubertragern 3
Viele Ubertrager verhalten sich linear, solange die Eingangssignale eine ge-wisse, von Fall zu Fall unterschiedliche Grenze nicht uberschreiten. Z. B. ist dieLuftschallubertragung unter (etwa) 130 dB faktisch linear. Fur sehr große Pe-gel oberhalb von 140 dB allerdings wird auch die Schallausbreitung in Luft zueinem nichtlinearen Phanomen. Auch die elektroakustischen Wandler sind beiausreichend kleinen Anregegroßen linear. Nur bei den hochsten empfangenenSchalldrucken weisen Mikrophone Nichtlinearitaten auf. Etwas haufiger tretenNichtlinearitaten bei Lautsprechern dann auf, wenn ihre Eingangsspannungvor allem bei preiswerteren Exemplaren zwecks großer Lautstarke-Ausbeuteubertrieben eingestellt wird.
Ein einfaches, dabei vielleicht ein wenig konstruiert wirkendes Beispiel fureinen nichtlinearen Ubertrager besteht im Quadrierer y(t) = x2(t). Schondieses Beispiel zeigt, dass nichtlineare Systeme die Signalfrequenz eines har-monischen Eingangssignals verandern. Fur x(t) = x0 cosωt ist
y(t) = x2(t) = x20 cos2 ωt =
x20
2(1 + cos 2ωt) . (1.3)
Das Ausgangssignal enthalt also einen Gleichanteil und einen Anteil mit derdoppelten Frequenz des Einganges. Darin besteht allgemeiner die Konsequenzaus einer Nichtlinearitat: zu einer Eingangsfrequenz entstehen im Ausgangs-signal neue, zusatzliche Frequenzen. Obwohl das sehr oft der Fall ist, mussendiese neuen Frequenzen nicht immer - wie beim Quadrierer - Vielfache derEingangsfrequenz sein; es konnen z. B. durchaus auch Frequenz-Halbierungenund allgemeine, gebrochene Frequenzverhaltnisse auftreten.
Wie oben schon angedeutet ist der Ubergang zwischen dem linearen unddem nichtlinearen Bereich eines Ubertragers in Wahrheit fließend. Deshalbwerden Maßzahlen fur den Nichtlinearitatsgrad angegeben. Am bekannte-sten ist der sogenannte Klirrfaktor (er besteht in der Summe der Ausgangs-Amplituden der nicht im Eingang enthaltenen Frequenzen, geteilt durch dieAusgangs-Amplitude mit der Eingangsfrequenz). Statt einen Ubertrager mitdem Beiwort ”linear“ zu charakterisieren, ware die Angabe des Klirrfaktorsals Funktion der Eingangsamplitude und der Frequenz praziser. Dieser ist al-lerdings oft unmessbar klein, wie zum Beispiel bei der Luftschallubertragungunter 100 dB.
Benutzer von heute aus der Mode gekommenen Tonbandgeraten werdensich an das Aussteuern vor Aufnahmen erinnern. Damit ist in Wahrheit derKlirrfaktor auf (etwa) 0,03 begrenzt worden.
1.1.2 Zeitinvarianz
Zeitinvariant wird ein Ubertrager dann genannt, wenn die SystemreaktionL[x(t)] bei beliebiger Zeitverzogerung τ des Einganges ebenfalls nur um τverzogert wird. Fur beliebige x(t) und τ soll also
y(t− τ) = L[x(t− τ)] (1.4)
4 1 Grundlagen der Ubertragungstheorie
gelten, wobei naturlich fur die unverzogerten Varianten y(t) = L[x(t)] voraus-gesetzt worden ist.
Zeitvariante Systeme andererseits sind solche, deren Parameter sich nacheiner gewissen Zeit merklich verandert haben. Z. B. kann sich in einem Saalwahrend einer Darbietung die Temperatur und damit auch die Schallgeschwin-digkeit andern, streng genommen handelt es sich also bei der Schallausbrei-tung im Raum um eine zeitvariante Ubertragung. Andererseits erfolgt dieErwarmung oft so langsam, dass man in kleinen, nur wenige Minuten betra-genden Zeitintervallen, die beispielsweise fur Messungen vorgesehen sind, vonZeitinvarianz ausgehen kann.
Ein wirklich zeitvariantes System besteht in der Schallubertragung, bei derSender und Empfanger relativ zueinander bewegt werden, denn hier andertsich die Laufzeit zwischen Quellort und Mikrophonort selbst zeitlich. Derdabei auftretende Effekt besteht in der Doppler-Verschiebung der Signalfre-quenz. Nicht nur nichtlineare, sondern offensichtlich auch zeitvariante Systemeandern demnach die Frequenz des Eingangssignals, bei der Ubertragung findeteine Frequenzveranderung statt.
Andererseits scheint die Erfahrung zu zeigen, dass lineare und zeitinva-riante Ubertrager frequenztreu sind. Besteht der Signaleingang eines linea-ren und zeitinvarianten Systems aus einem harmonischen Signal (also einerCosinus-Funktion) einer gewissen Frequenz, dann bildet der Ausgang eben-falls ein harmonisches Signal gleicher Frequenz, das dabei nur eine andereAmplitude und eine andere Phase als der Eingang besitzen kann. Alle hierbesprochenen Beispiele weisen auf dieses Prinzip hin. Tatsachlich lasst sichallgemein zeigen, dass das Gesetz der Frequenztreue fur alle linearen undzeitinvarianten Ubertrager gilt; der Beweis wird im ubernachsten Abschnittgefuhrt werden.
1.2 Beschreibung durch die Impulsantwort
Am einfachsten beschreibt man die Wirkung eines inhomogenen Ganzen, in-dem man es gedanklich in viele (im Grenzfall: in unendlich viele) nicht mehrzerkleinerbare Bestandteile zerlegt und die Wirkung der Bestandteile fur sichbetrachtet. So verfahrt man zum Beispiel, wenn das Schwerefeld eines inhomo-genen Korpers interessiert. Man zerlegt ihn in (infinitesimal) kleine Wurfel mitkonstanter Dichte. Fur jeden Wurfel kann man dann das Schwerefeld bestim-men; das Ganze ist dann die Summe der Teile (das lauft auf die Berechnungeines Integrals hinaus).
Genauso kann man auch bei der Ubertragungs-Beschreibung verfahren.Man zerlegt das Eingangssignal in nicht mehr verkleinerbare Teile, betrachtetdann die Ubertragung dieser Teile und setzt dann das Ausgangssignal durchSummation zusammen, wobei im letzten Schritt die vorausgesetzte Linearitatund Zeitinvarianz genutzt werden.
1.2 Beschreibung durch die Impulsantwort 5
Aus Grunden der Anschaulichkeit erfolgt die Zerlegung zunachst in end-lich breite Bausteine, die beliebig schmalen gehen dann als Grenzfall aus denendlich breiten hervor.
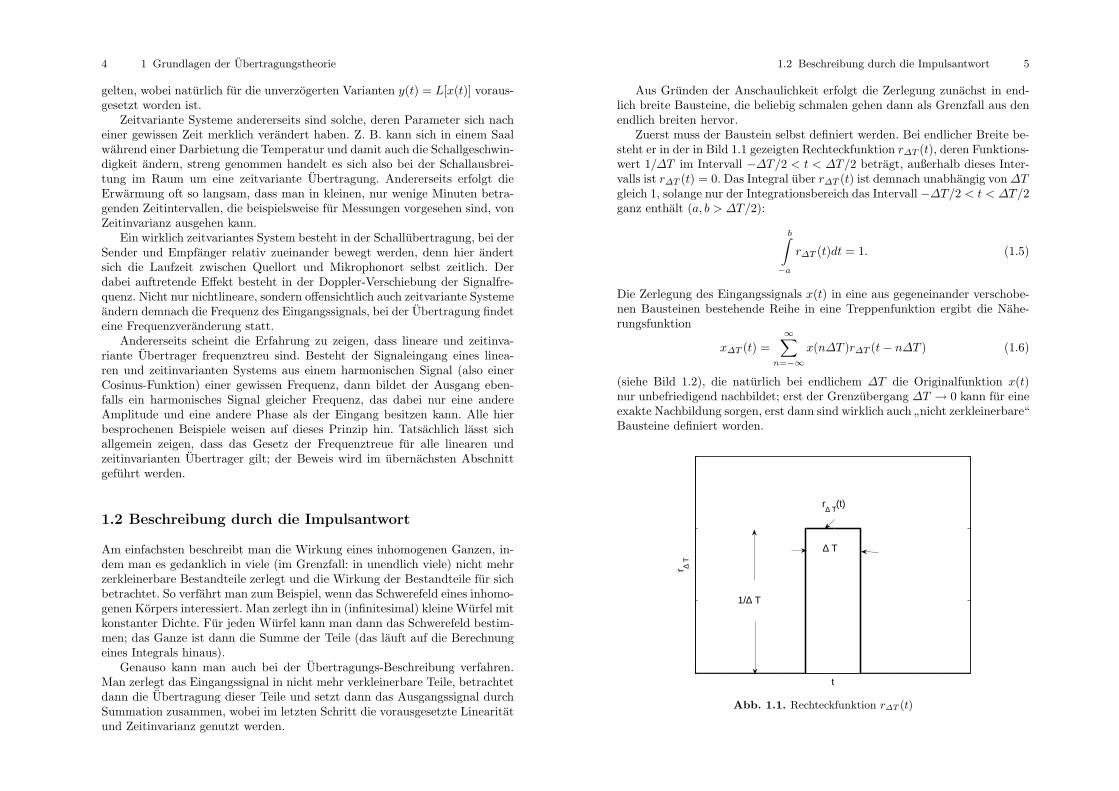
Zuerst muss der Baustein selbst definiert werden. Bei endlicher Breite be-steht er in der in Bild 1.1 gezeigten Rechteckfunktion r∆T (t), deren Funktions-wert 1/∆T im Intervall −∆T/2 < t < ∆T/2 betragt, außerhalb dieses Inter-valls ist r∆T (t) = 0. Das Integral uber r∆T (t) ist demnach unabhangig von ∆Tgleich 1, solange nur der Integrationsbereich das Intervall −∆T/2 < t < ∆T/2ganz enthalt (a, b > ∆T/2):
b∫−a
r∆T (t)dt = 1. (1.5)
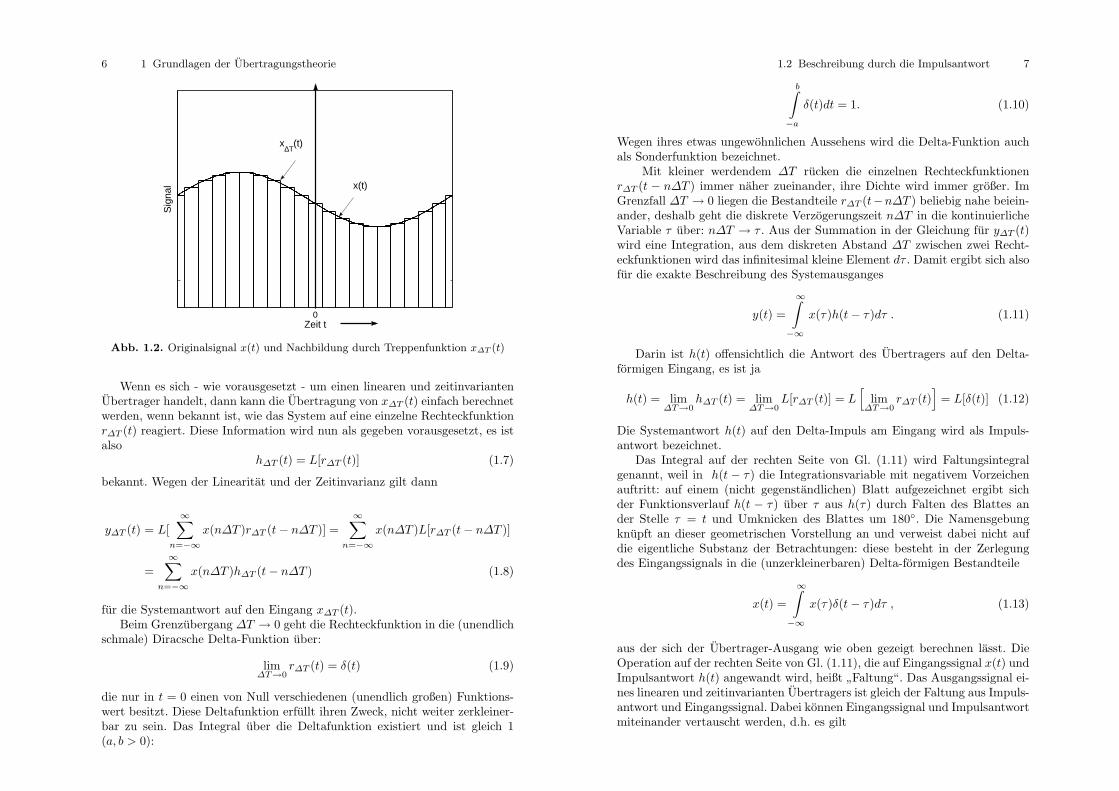
Die Zerlegung des Eingangssignals x(t) in eine aus gegeneinander verschobe-nen Bausteinen bestehende Reihe in eine Treppenfunktion ergibt die Nahe-rungsfunktion
x∆T (t) =∞∑
n=−∞x(n∆T )r∆T (t− n∆T ) (1.6)
(siehe Bild 1.2), die naturlich bei endlichem ∆T die Originalfunktion x(t)nur unbefriedigend nachbildet; erst der Grenzubergang ∆T → 0 kann fur eineexakte Nachbildung sorgen, erst dann sind wirklich auch ”nicht zerkleinerbare“Bausteine definiert worden.
tr ∆
T
∆ T
r∆ T
(t)
1/∆ T
Abb. 1.1. Rechteckfunktion r∆T (t)
6 1 Grundlagen der Ubertragungstheorie
0Zeit t
Sig
nal x(t)
x∆T
(t)
Abb. 1.2. Originalsignal x(t) und Nachbildung durch Treppenfunktion x∆T (t)
Wenn es sich - wie vorausgesetzt - um einen linearen und zeitinvariantenUbertrager handelt, dann kann die Ubertragung von x∆T (t) einfach berechnetwerden, wenn bekannt ist, wie das System auf eine einzelne Rechteckfunktionr∆T (t) reagiert. Diese Information wird nun als gegeben vorausgesetzt, es istalso
h∆T (t) = L[r∆T (t)] (1.7)
bekannt. Wegen der Linearitat und der Zeitinvarianz gilt dann
y∆T (t) = L[∞∑
n=−∞x(n∆T )r∆T (t− n∆T )] =
∞∑n=−∞
x(n∆T )L[r∆T (t− n∆T )]
=∞∑
n=−∞x(n∆T )h∆T (t− n∆T ) (1.8)
fur die Systemantwort auf den Eingang x∆T (t).Beim Grenzubergang ∆T → 0 geht die Rechteckfunktion in die (unendlich
schmale) Diracsche Delta-Funktion uber:
lim∆T→0
r∆T (t) = δ(t) (1.9)
die nur in t = 0 einen von Null verschiedenen (unendlich großen) Funktions-wert besitzt. Diese Deltafunktion erfullt ihren Zweck, nicht weiter zerkleiner-bar zu sein. Das Integral uber die Deltafunktion existiert und ist gleich 1(a, b > 0):
1.2 Beschreibung durch die Impulsantwort 7
b∫−a
δ(t)dt = 1. (1.10)
Wegen ihres etwas ungewohnlichen Aussehens wird die Delta-Funktion auchals Sonderfunktion bezeichnet.
Mit kleiner werdendem ∆T rucken die einzelnen Rechteckfunktionenr∆T (t − n∆T ) immer naher zueinander, ihre Dichte wird immer großer. ImGrenzfall ∆T → 0 liegen die Bestandteile r∆T (t−n∆T ) beliebig nahe beiein-ander, deshalb geht die diskrete Verzogerungszeit n∆T in die kontinuierlicheVariable τ uber: n∆T → τ . Aus der Summation in der Gleichung fur y∆T (t)wird eine Integration, aus dem diskreten Abstand ∆T zwischen zwei Recht-eckfunktionen wird das infinitesimal kleine Element dτ . Damit ergibt sich alsofur die exakte Beschreibung des Systemausganges
y(t) =
∞∫−∞
x(τ)h(t− τ)dτ . (1.11)
Darin ist h(t) offensichtlich die Antwort des Ubertragers auf den Delta-formigen Eingang, es ist ja
h(t) = lim∆T→0
h∆T (t) = lim∆T→0
L[r∆T (t)] = L[
lim∆T→0
r∆T (t)]
= L[δ(t)] (1.12)
Die Systemantwort h(t) auf den Delta-Impuls am Eingang wird als Impuls-antwort bezeichnet.
Das Integral auf der rechten Seite von Gl. (1.11) wird Faltungsintegralgenannt, weil in h(t − τ) die Integrationsvariable mit negativem Vorzeichenauftritt: auf einem (nicht gegenstandlichen) Blatt aufgezeichnet ergibt sichder Funktionsverlauf h(t − τ) uber τ aus h(τ) durch Falten des Blattes ander Stelle τ = t und Umknicken des Blattes um 180◦. Die Namensgebungknupft an dieser geometrischen Vorstellung an und verweist dabei nicht aufdie eigentliche Substanz der Betrachtungen: diese besteht in der Zerlegungdes Eingangssignals in die (unzerkleinerbaren) Delta-formigen Bestandteile
x(t) =
∞∫−∞
x(τ)δ(t− τ)dτ , (1.13)
aus der sich der Ubertrager-Ausgang wie oben gezeigt berechnen lasst. DieOperation auf der rechten Seite von Gl. (1.11), die auf Eingangssignal x(t) undImpulsantwort h(t) angewandt wird, heißt ”Faltung“. Das Ausgangssignal ei-nes linearen und zeitinvarianten Ubertragers ist gleich der Faltung aus Impuls-antwort und Eingangssignal. Dabei konnen Eingangssignal und Impulsantwortmiteinander vertauscht werden, d.h. es gilt
8 1 Grundlagen der Ubertragungstheorie
y(t) =
∞∫−∞
x(τ)h(t− τ)dτ =
∞∫−∞
h(τ)x(t− τ)dτ , (1.14)
wie man leicht mit einer Variablensubstitution in Gl. (1.11) zeigen kann (mansetzt dazu u = t − τ und deshalb du = −dτ und schreibt anschließend fur ueinfach wieder τ). Die Faltung ist also invariant gegenuber der Vertauschungder Signale, auf der sie angewandt wird. Bei einem Ubertrager konnen dem-nach Eingangssignal und Impulsantwort vertauscht werden, ohne dass sich derAusgang dabei andert.
Der Kern der geschilderten Uberlegungen besteht in der Zerlegung vonSignalen in nicht mehr dichter packbare Delta-Impulse, die deshalb beliebigschmal sein mussen. Damit ihr Integral von Null verschieden ist muss derFunktionswert notwendigerweise im Mittelpunkt unendlich groß sein. Die-ser Gedankengang kann mit der bekannten Reihenzerlegung von gegebenenFunktionen verglichen werden, nur dass hier die Integration uber unendlichschmale Teile an die Stelle der Summation uber diskrete Elemente tritt. DerZweck der Darstellung von Signalen durch ihren Delta-Kamm (so ließe sichGl. (1.13) auch bezeichnen) besteht darin, dass nun der Ubertrager-Ausgangaus dem derart zerlegten Eingang unmittelbar berechnet werden kann. Dasist naturlich auch direkt aus der Zerlegung (1.13) ohne den Umweg uber dieaus didaktischen Grunden an den Anfang gestellte Zerlegung in eine Treppen-funktion moglich:
y(t) = L
∞∫−∞
x(τ)δ(t− τ)dτ
. (1.15)
Wegen der vorausgesetzten Linearitat darf die Reihenfolge von Integrationund Operation L vertauscht werden:
y(t) =
∞∫−∞
L[x(τ)δ(t− τ)]dτ =
∞∫−∞
x(τ)L[δ(t− τ)]dτ . (1.16)
Auf Grund der angenommen Zeitinvarianz wird daraus naturlich ebenfallswieder
y(t) =
∞∫−∞
x(τ)h(t− τ)dτ .
Faltungsintegral und Impulsantwort h(t) beschreiben die Ubertragung imZeitbereich, indem die Wirkungen vieler gegeneinander verschobener Ein-gangsimpulse auf der Ausgangsseite aufaddiert werden. Der Hauptnachteildieser Methode besteht oft in einer gewissen Unanschaulichkeit der Impuls-antwort zur Charakterisierung der Ubertragung. Z. B. ist die in einem Emp-fangsraum ankommende Reaktion auf einen Knall im Senderaum, der durch
1.3 Das Invarianz-Prinzip 9
eine einschalige (dunne) Wand ubertragen worden ist, eine Art von ”verlanger-tem“ Impuls; tatsachlich besteht die Impulsantwort in einer sehr rasch abklin-genden Exponentialfunktion (h(t) ∼ e−t/T mit T = m′′/%0c fur den senkrech-ten Schalleinfall und fur t ≥ 0, fur t < 0 ist naturlich h(t) = 0, fur dieBezeichnungen siehe auch Kapitel 8). Obwohl daraus die Schallubertragunggewiss korrekt berechnet werden kann, lasst sich doch der Impulsantwort nursehr schwer eine anschauliche, leicht einpragsame Deutung des physikalischenPhanomens entnehmen.
Die Beschreibung der Ubertragung mit Hilfe von Frequenzgangen, diein den folgenden Abschnitten betrachtet wird, bietet dagegen ein unmittel-bar einleuchtendes und eingangiges Konzept, in dessen Zentrum die Klang-verfarbung von Signalen durch die Ubertragung steht.
1.3 Das Invarianz-Prinzip
Schon im vorletzten Abschnitt ist die Vermutung aufgestellt worden, dasslineare und zeitinvariante Ubertrager ein harmonisches (sinusformiges) Ein-gangssignal stets unverzerrt ubertragen: Das Ausgangssignal besteht ebenfallsstets in einem harmonischen Signal gleicher Frequenz, lediglich Amplitude undPhase werden durch den Ubertrager geandert, die Signalgestalt selbst ist alsoinvariant gegenuber der Ubertragung.
Dass dieses vermutete Prinzip tatsachlich allgemein gilt, lasst sich mit Hilfedes Faltungsintegrales (1.14) zeigen. Dazu wird ein Eingangssignal
x(t) = Re{x0ejωt} (1.17)
mit der komplexen Amplitude x0 angenommen. Der zugehorige Ausgang er-gibt sich nach Gl. (1.14) zu
y(t) =
∞∫−∞
h(τ)Re{x0ejω(t−τ)}dτ = Re
x0ejωt∞∫−∞
h(τ)e−jωτdτ
. (1.18)
Das letzte Integral hangt nur von der Signalfrequenz ω ab, es ist dabei insbe-sondere von t unabhangig. Setzt man zunachst kurz
H(ω) =
∞∫−∞
h(τ)e−jωτdτ , (1.19)
so erhalt manx(t) = Re{H(ω)x0ejωt} , (1.20)
und das beweist die aufgestellte Behauptung: ist der Eingang harmonischmit der Frequenz ω, dann ist auch der Ausgang harmonisch mit der gleichenFrequenz. Die Ubertragung wird vollstandig beschrieben durch Angabe der
10 1 Grundlagen der Ubertragungstheorie
Amplitudenanderung |H| und der Phasenverschiebung ϕ, die im komplexenUbertragungsfaktor
H(ω) = |H|ejϕ (1.21)
zusammengefasst sind.
1.4 Fourier-Zerlegung
Es ist eine bestechend einfache und recht naheliegende Idee, die Ubertragungvon allgemeinen Signalen beliebiger anderer Form auf die von harmonischenSignalverlaufen zuruckzufuhren. Dazu muss ein gegebener Signalverlauf, z. B.der Eingang x(t) eines Systems, durch eine Funktionenreihe der Form
x(t) =∑n
xnejωnt (1.22)
dargestellt werden. Ist das erst einmal geschafft (das heißt, sind die erfor-derlichen Frequenzen ωn und die dazugehorigen komplexen Amplituden xnermittelt), dann gestaltet sich die Beschreibung von Ubertragungsvorgangensehr einfach. Es muss sich namlich auf Grund des Invarianzprinzips (und derdafur ja schon vorausgesetzten Linearitat) der Ausgang stets aus den gleichenFrequenzen wie der Eingang zusammensetzen, wobei nur die Einzelamplitudendurch die Ubertragung geandert werden konnen:
y(t) =∑n
H(ωn)xnejωnt (1.23)
Je nach Eingangssignal treten andere Frequenzen mit anderen Amplitudenauf, die ja gerade fur das spezielle Signal charakteristisch sind. Sollen alleMoglichkeiten erfasst werden, dann muss der komplexwertige Ubertragungs-faktor H nun fur alle Frequenzen bekannt sein. Eine vollstandige Beschrei-bung der Ubertragung erhalt man also aus dem Frequenzgang H(ω). Umanzudeuten, dass dabei die Frequenz als kontinuierliche Variable aufzufassenist, wird H(ω) als Ubertragungsfunktion bezeichnet. Die Beschreibung derUbertragung durch den Frequenzgang der Ubertragungsfunktion lasst einerecht anschauliche Interpretation zu. Wenn man sich den Eingang in Fre-quenzen - bildlich gesprochen in Klangfarben - zerlegt denkt, dann kann dieUbertragung als eine reine Verfarbung aufgefasst werden. Ein uber eine Wandubertragenes Schallsignal z. B. klingt im Empfangsraum leiser und dumpfer,weil die Ubertragungsfunktion bei hohen Frequenzen klein wird.
Voraussetzung fur dieses Konzept, Ubertragungen als Klangverfarbun-gen aufzufassen, ist, dass beliebige Signale durch eine Funktionenreihe mitharmonischen Bestandteilen tatsachlich auch dargestellt werden konnen, wieGl. (1.22) fordert.
Die folgenden Abschnitte sind den Einzelheiten dieser meist auch alsFourier-Zerlegung bezeichneten Dekomposition gegebener Signale und der
1.4 Fourier-Zerlegung 11
Frage ihrer Existenz gewidmet. Dabei sei nochmals die Ausgangsidee her-vorgehoben. In Gl. (1.22) wird der Versuch unternommen, ein gegebenes, be-kanntes Signal x(t) durch eine Funktionenreihe auszudrucken. Die Elementeder Funktionenreihe bestehen dabei in harmonischen, sinusformigen Signalenmit (vielen) unterschiedlichen Frequenzen. Der Grund fur die Darstellung vonetwas ja eigentlich schon Bekanntem ”mit anderen Mitteln“ besteht einfachdarin, dass sich dann - unter Anwendung des Invarianzprinzips - Ubertra-gungen mit einfachen und anschaulichen Mitteln beschreiben lassen.
1.4.1 Fourier-Reihen
Die Betrachtungen zur Fourier-Zerlegung beginnen mit dem einfachsten Fall,bei dem die zu zerlegende Funktion selbst mit der Periode T periodisch ist.Der Vorteil bei dieser Annahme besteht darin, dass von vornherein feststeht,welche Frequenzen vorkommen konnen: die in Gl. (1.22) noch nicht naherspezifizierten Frequenzen ωi sind von Anfang an bekannt. Die in Gl. (1.22)auftretenden Bausteine besitzen allgemein die Perioden Tn
ωn =2πTn
. (1.24)
In einer Reihenentwicklung fur eine periodische Funktion T durfen nur Bau-steine auftreten, deren Periodendauern Tn ganzzahlig in T enthalten sind. Furdie Perioden der Bestandteile, die uberhaupt vorkommen konnen, gilt also
Tn =T
n. (1.25)
Es wird nun eine ”Modellfunktion“ definiert, die - so will es die Aufga-benstellung - nur aus den Bestandteilen zusammengesetzt ist, in die zerlegtwerden soll. Es wird also
xM (t) =N∑
n=−NAnej2πn
tT (1.26)
definiert. Wie man sieht, sind hier zunachst jeweils N positive und N negativeFrequenzen ωn zugelassen worden Man bedenke dabei, dass es sich hier umeine mathematische und nicht um eine physikalische Formulierung handelt.Eine negative Frequenz im Sinne eines Zahlenwertes ωn < 0 bildet naturlicheine sinnvolle Große, auch wenn die Frequenz eines periodischen Vorganges imSinne von ”Anzahl pro Sekunde“ ebenso naturlich eine positive Zahl darstellt.
Ubrig bleibt nun nur die Aufgabe, die Koeffizienten An so zu bestimmen,dass sich Modellfunktion xM (t) und gegebenes Signal x(t) moglichst nichtunterscheiden. Wird das (ideal und damit fehlerfrei) erreicht, dann ist damitauch die beabsichtigte Reihenentwicklung vorgenommen worden; Modell undOriginal sind dann gleich.
12 1 Grundlagen der Ubertragungstheorie
Es gibt (mindestens) zwei unterschiedliche Verfahren, mit denen die unbe-kannten Amplituden An so aus dem gegebenen Signal x(t) bestimmt werden,dass sich ein ”kleiner“, mit wachsendem N immer mehr abnehmender Fehlerfur xM (t) ergibt. Meist wird dazu die mittlere quadratische Abweichung E
E =1T
T∫0
|x(t)− xM (t)|2dt (1.27)
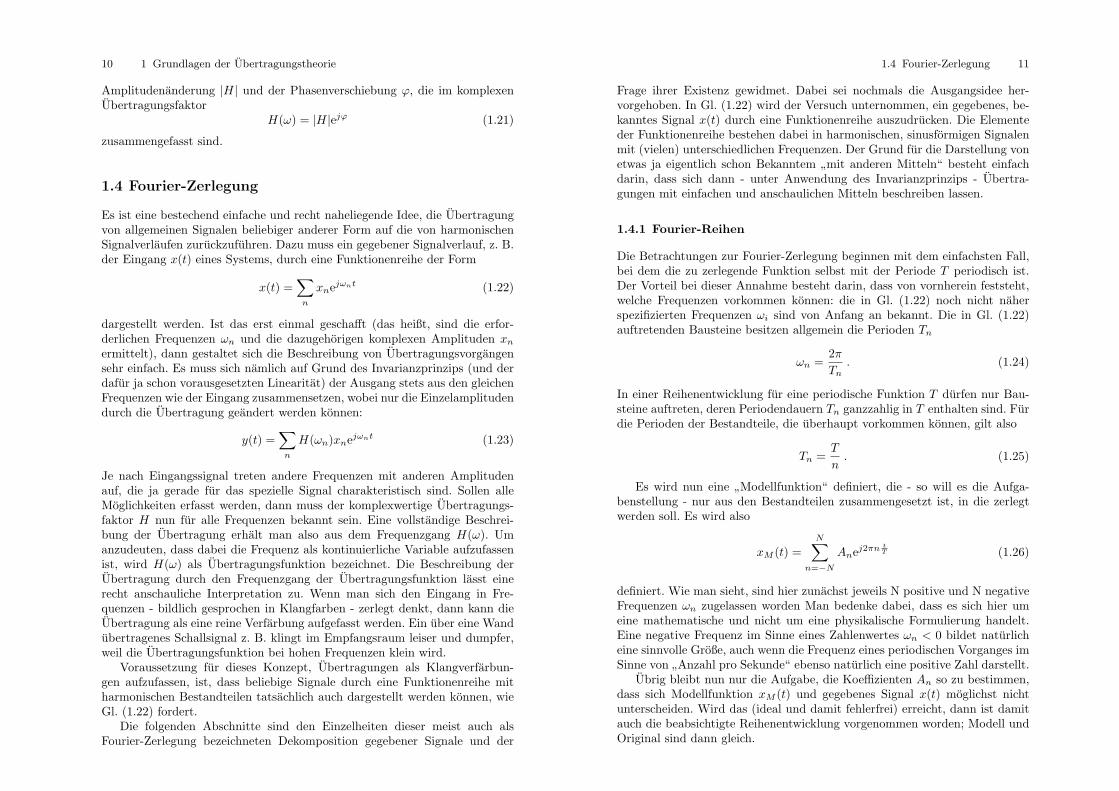
minimiert. Dieses Verfahren wird als ”Methode des kleinsten Fehler-Quadra-tes“ (kurz auch einfach mit ”least squares“) bezeichnet. Auf diese – etwas un-anschaulichere – Vorgehensweise wird hier nicht eingegangen, sie ist in vielenWerken geschildert, in denen die Fouriersummen betrachtet werden. Zunachstsei hier das viel anschaulichere Verfahren vorgestellt, bei dem die unbekanntenAmplituden An so bestimmt werden, dass Modell xM (t) und Original x(t) in2N + 1 gleichabstandigen Zeitpunkten ubereinstimmen. Die Koeffizienten Anwerden also im Folgenden so berechnet, dass
xM (i∆t) = x(i∆t) (1.28)
furi = 0, 1, 2, 3, ...2N
gilt. Dabei betragt das Inkrement ∆t
∆t =T
2N + 1. (1.29)
Bild 1.3 versucht das Verfahren anhand einer Grafik zu illustrieren.
0 1t/T
Sig
nal x
(t)
Stützstellen
Abb. 1.3. Anpassung von xM (t) an x(t) in den Stutzstellen t = i∆t, in denenxM (i∆t) = x(i∆t) gesetzt wird.
1.4 Fourier-Zerlegung 13
Die 2N + 1 Bedingungsgleichungen (1.28) liefern jetzt aus der Modelldefi-nition (1.26) das Gleichungssystem fur die gesuchten Koeffizienten:
N∑n=−N
Anej2πni
2N+1 = x(i∆t) . (1.30)
Wie gesagt gibt Gl. (1.30) das Gleichungssystem zur Bestimmung der gesuch-ten Koeffizienten An an. Durch Einsetzen von i = 0, 1, 2, 3, ..., 2N entstehenaus (1.30) 2N + 1 Gleichungen.
Dieses Gleichungssystem kann nun leicht nach einer (beliebig gewahlten)Unbekannten Am wie folgt aufgelost werden. Dazu wird die i-te Gleichung desSystems (1.30) mit e−j2π
mi2N+1 multipliziert, das ergibt zunachst
N∑n=−N
Anej2π(n−m)i2N+1 = x(i∆t)e−j2π
mi2N+1 . (1.31)
Anschließend werden alle 2N + 1 Gleichungen dieses Gleichungssystems auf-addiert:
2N∑i=0
N∑n=−N
Anej2π(n−m)i2N+1 =
2N∑i=0
x(i∆t)e−j2πmi
2N+1 . (1.32)
Die Umkehrung der Summationen-Reihenfolge links ergibt
N∑n=−N
An
2N∑i=0
ej2π(n−m)i2N+1 =
2N∑i=0
x(i∆t)e−j2πmi
2N+1 . (1.33)
Die innere Summe auf der linken Seite bildet eine geometrische Reihe mit
2N∑i=0
ej2π(n−m)i2N+1 = 0 , (1.34)
wenn n−m 6= 0 gilt. Fur n = m ist
2N∑i=0
ej2π(n−m)i2N+1 =
2N∑i=0
1 = 1 + 1 + 1 + ... = 2N + 1 , (1.35)
Alle Elemente in der Summe mit dem Laufindex n auf der linken Seite vonGl. (1.33) sind deshalb gleich Null, mit Ausnahme nur des einzigen Summan-den mit n = m. Wie beabsichtigt wird also Gl. (1.33) mit den ausgefuhrtenRechenoperationen tatsachlich nach der Unbekannten Am aufgelost, fur die
Am =1
2N + 1
2N∑i=0
x(i∆t)e−j2πmi
2N+1 . (1.36)
14 1 Grundlagen der Ubertragungstheorie
gilt. Gl. (1.36) gibt die Auflosung des Gleichungssystems (1.30) nach der spe-ziell ausgewahlten Unbekannten Am an. Weil es vollig gleichgultig ist, welchespezielle Unbekannte Am dabei ausgesucht worden ist, gilt Gl. (1.36) fur alleUnbekannten Am. Alle Amplituden An der Modellfunktion Gl. (1.26) sinddamit aus dem Originalsignal x(t) berechnet.
Von einem grundsatzlichen Standpunkt aus ist damit gezeigt worden, dassein gegebenes Signal in einer endlichen, aber beliebig hohen Anzahl von Punk-ten durch die Funktionenreihe (1.26) exakt nachgebildet werden kann. DieAufgabenstellung ist demnach sinnvoll und losbar (und das gilt ja keineswegsfur jede andere denkbare Aufgabenstellung).
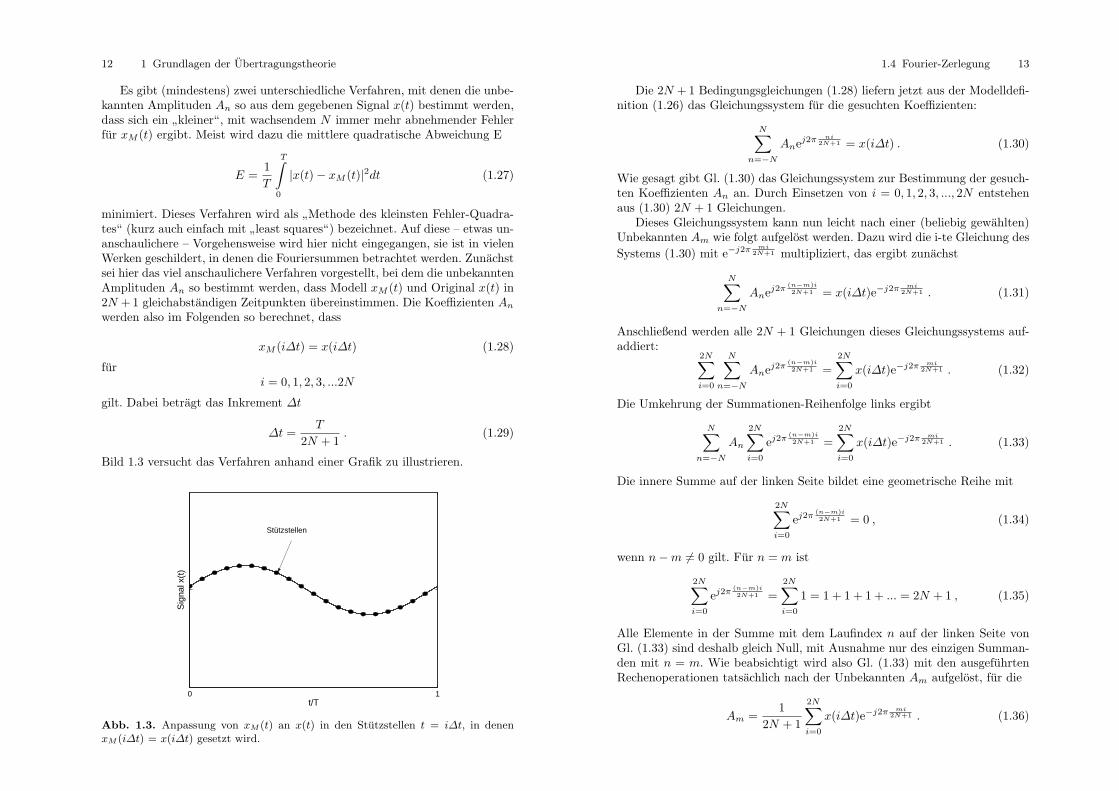
Wie gut - oder schlecht - ein gegebenes Signal x(t) nun durch sein ModellxM (t) nachgebildet wird, das zeigen zunachst durchgerechnete Beispiele. DieBilder 1.4 bis 1.6 demonstrieren anhand eines als Beispiel gewahlten Signals
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
t/T
x(t)
xM
(t)
Abb. 1.4. Nachbildung eines abknickenden Signals mit N=8. Wiedergegeben istnur eine Periode der periodischen Signale x und xM .
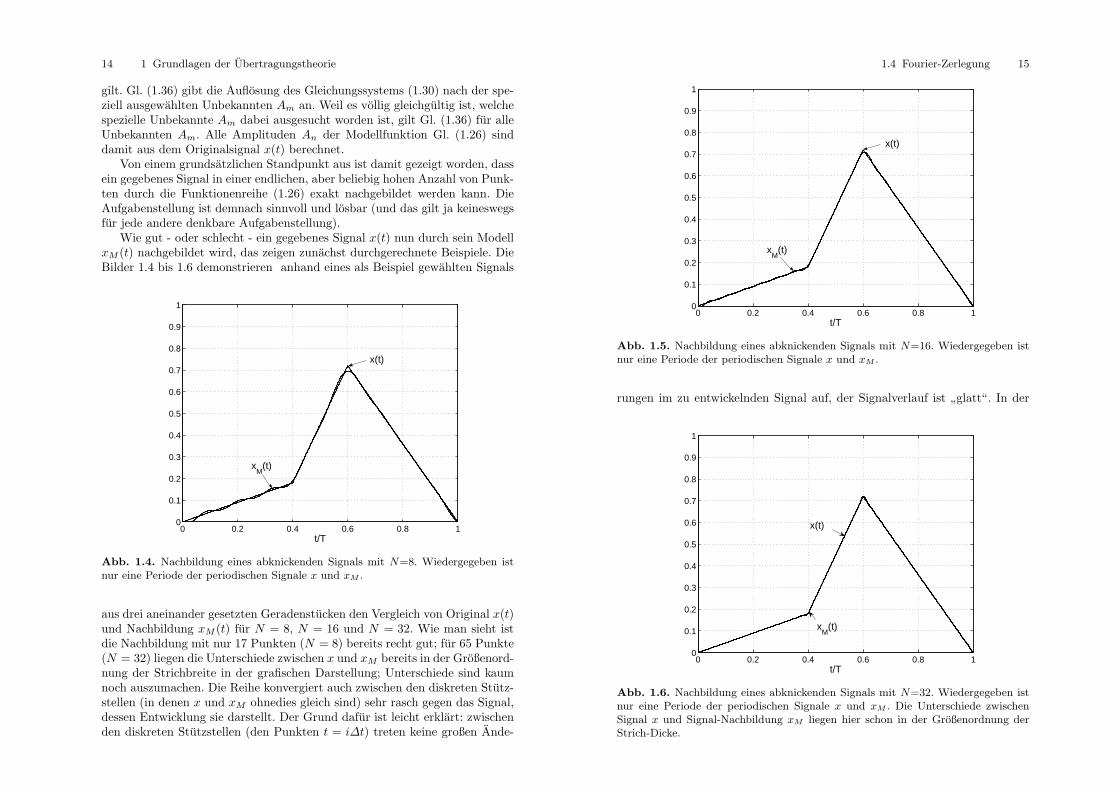
aus drei aneinander gesetzten Geradenstucken den Vergleich von Original x(t)und Nachbildung xM (t) fur N = 8, N = 16 und N = 32. Wie man sieht istdie Nachbildung mit nur 17 Punkten (N = 8) bereits recht gut; fur 65 Punkte(N = 32) liegen die Unterschiede zwischen x und xM bereits in der Großenord-nung der Strichbreite in der grafischen Darstellung; Unterschiede sind kaumnoch auszumachen. Die Reihe konvergiert auch zwischen den diskreten Stutz-stellen (in denen x und xM ohnedies gleich sind) sehr rasch gegen das Signal,dessen Entwicklung sie darstellt. Der Grund dafur ist leicht erklart: zwischenden diskreten Stutzstellen (den Punkten t = i∆t) treten keine großen Ande-
1.4 Fourier-Zerlegung 15
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
t/T
x(t)
xM
(t)
Abb. 1.5. Nachbildung eines abknickenden Signals mit N=16. Wiedergegeben istnur eine Periode der periodischen Signale x und xM .
rungen im zu entwickelnden Signal auf, der Signalverlauf ist ”glatt“. In der
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
t/T
x(t)
xM
(t)
Abb. 1.6. Nachbildung eines abknickenden Signals mit N=32. Wiedergegeben istnur eine Periode der periodischen Signale x und xM . Die Unterschiede zwischenSignal x und Signal-Nachbildung xM liegen hier schon in der Großenordnung derStrich-Dicke.
16 1 Grundlagen der Ubertragungstheorie
mathematischen Fachsprache bezeichnet man ein solches Signal als ”stetig“.Fur stetige Signale - so lehrt das Beispiel - hat man also keine Schwierigkeitenfur die beabsichtigte Reihenentwicklung zu erwarten. Es genugt eine (ver-gleichsweise) geringe Anzahl 2N + 1 von zu berucksichtigenden Frequenzenund von Stutzstellen. Im Prinzip konvergiert also die Reihe mit wachsendemN ”rasch“ gegen das Signal, das sie reprasentiert, wenn dieses einen stetigenVerlauf besitzt.
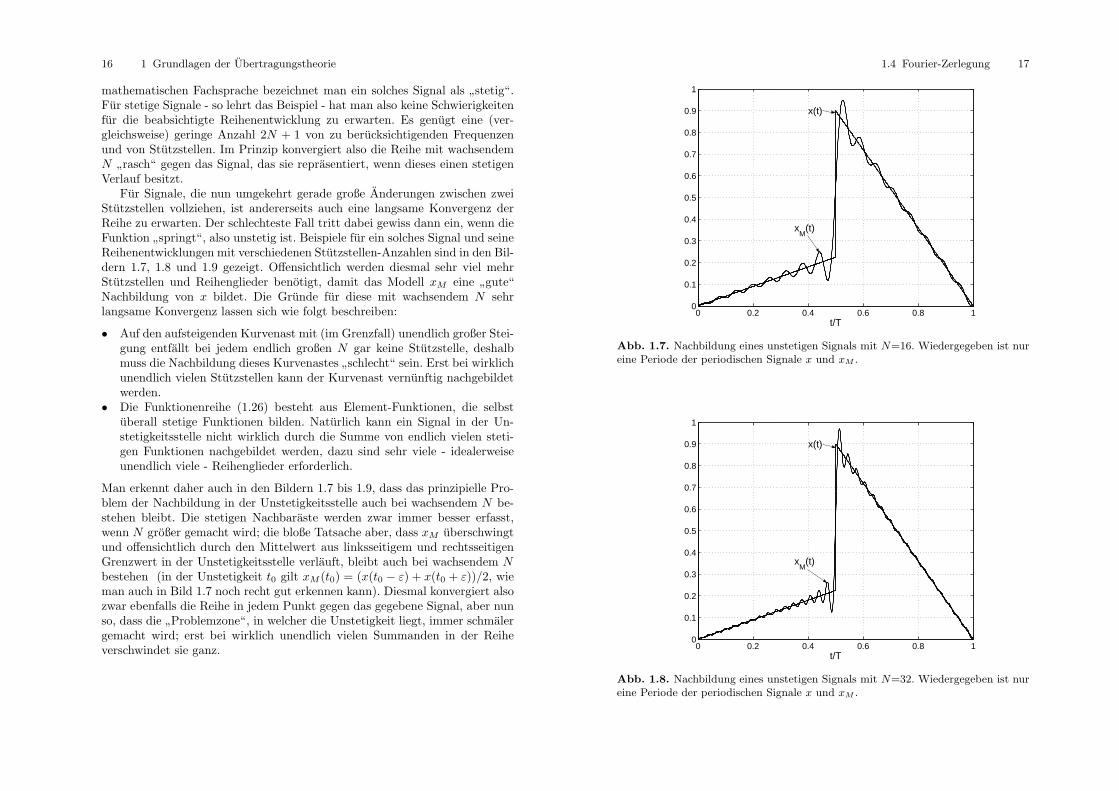
Fur Signale, die nun umgekehrt gerade große Anderungen zwischen zweiStutzstellen vollziehen, ist andererseits auch eine langsame Konvergenz derReihe zu erwarten. Der schlechteste Fall tritt dabei gewiss dann ein, wenn dieFunktion ”springt“, also unstetig ist. Beispiele fur ein solches Signal und seineReihenentwicklungen mit verschiedenen Stutzstellen-Anzahlen sind in den Bil-dern 1.7, 1.8 und 1.9 gezeigt. Offensichtlich werden diesmal sehr viel mehrStutzstellen und Reihenglieder benotigt, damit das Modell xM eine ”gute“Nachbildung von x bildet. Die Grunde fur diese mit wachsendem N sehrlangsame Konvergenz lassen sich wie folgt beschreiben:
• Auf den aufsteigenden Kurvenast mit (im Grenzfall) unendlich großer Stei-gung entfallt bei jedem endlich großen N gar keine Stutzstelle, deshalbmuss die Nachbildung dieses Kurvenastes ”schlecht“ sein. Erst bei wirklichunendlich vielen Stutzstellen kann der Kurvenast vernunftig nachgebildetwerden.
• Die Funktionenreihe (1.26) besteht aus Element-Funktionen, die selbstuberall stetige Funktionen bilden. Naturlich kann ein Signal in der Un-stetigkeitsstelle nicht wirklich durch die Summe von endlich vielen steti-gen Funktionen nachgebildet werden, dazu sind sehr viele - idealerweiseunendlich viele - Reihenglieder erforderlich.
Man erkennt daher auch in den Bildern 1.7 bis 1.9, dass das prinzipielle Pro-blem der Nachbildung in der Unstetigkeitsstelle auch bei wachsendem N be-stehen bleibt. Die stetigen Nachbaraste werden zwar immer besser erfasst,wenn N großer gemacht wird; die bloße Tatsache aber, dass xM uberschwingtund offensichtlich durch den Mittelwert aus linksseitigem und rechtsseitigenGrenzwert in der Unstetigkeitsstelle verlauft, bleibt auch bei wachsendem Nbestehen (in der Unstetigkeit t0 gilt xM (t0) = (x(t0 − ε) + x(t0 + ε))/2, wieman auch in Bild 1.7 noch recht gut erkennen kann). Diesmal konvergiert alsozwar ebenfalls die Reihe in jedem Punkt gegen das gegebene Signal, aber nunso, dass die ”Problemzone“, in welcher die Unstetigkeit liegt, immer schmalergemacht wird; erst bei wirklich unendlich vielen Summanden in der Reiheverschwindet sie ganz.
1.4 Fourier-Zerlegung 17
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
t/T
x(t)
xM
(t)
Abb. 1.7. Nachbildung eines unstetigen Signals mit N=16. Wiedergegeben ist nureine Periode der periodischen Signale x und xM .
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
t/T
x(t)
xM
(t)
Abb. 1.8. Nachbildung eines unstetigen Signals mit N=32. Wiedergegeben ist nureine Periode der periodischen Signale x und xM .
18 1 Grundlagen der Ubertragungstheorie
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
t/T
x(t)
xM
(t)
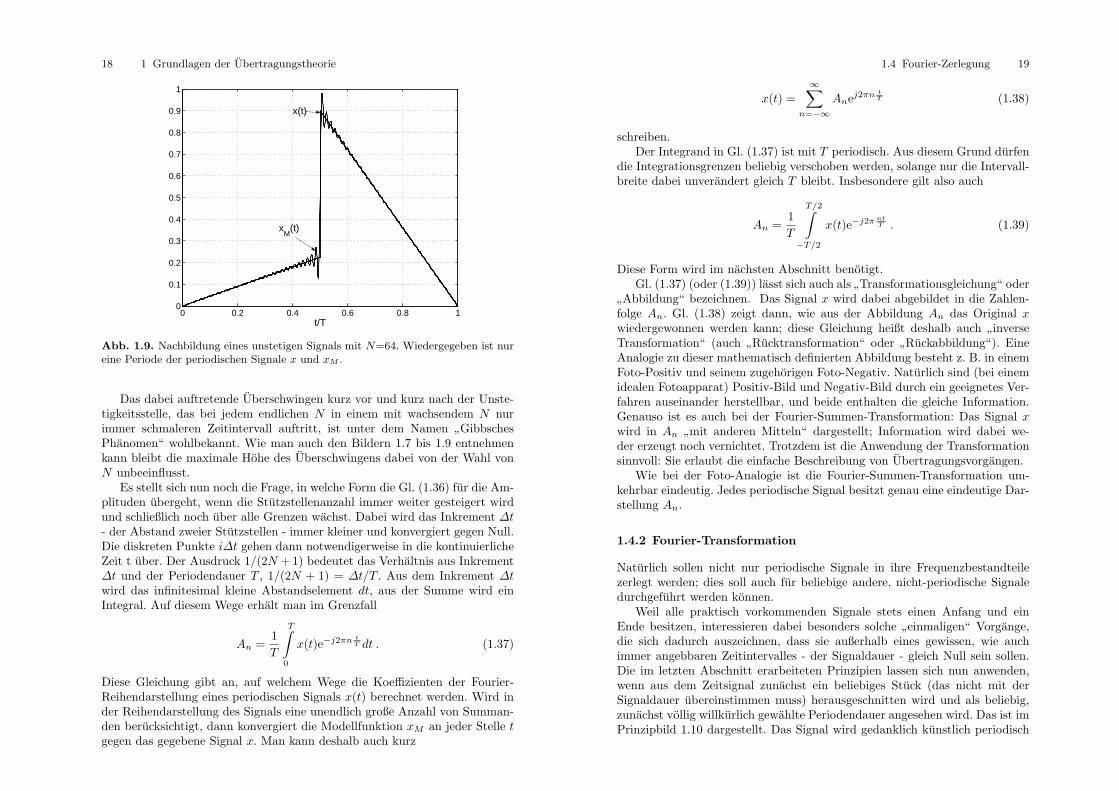
Abb. 1.9. Nachbildung eines unstetigen Signals mit N=64. Wiedergegeben ist nureine Periode der periodischen Signale x und xM .
Das dabei auftretende Uberschwingen kurz vor und kurz nach der Unste-tigkeitsstelle, das bei jedem endlichen N in einem mit wachsendem N nurimmer schmaleren Zeitintervall auftritt, ist unter dem Namen ”GibbschesPhanomen“ wohlbekannt. Wie man auch den Bildern 1.7 bis 1.9 entnehmenkann bleibt die maximale Hohe des Uberschwingens dabei von der Wahl vonN unbeeinflusst.
Es stellt sich nun noch die Frage, in welche Form die Gl. (1.36) fur die Am-plituden ubergeht, wenn die Stutzstellenanzahl immer weiter gesteigert wirdund schließlich noch uber alle Grenzen wachst. Dabei wird das Inkrement ∆t- der Abstand zweier Stutzstellen - immer kleiner und konvergiert gegen Null.Die diskreten Punkte i∆t gehen dann notwendigerweise in die kontinuierlicheZeit t uber. Der Ausdruck 1/(2N + 1) bedeutet das Verhaltnis aus Inkrement∆t und der Periodendauer T , 1/(2N + 1) = ∆t/T . Aus dem Inkrement ∆twird das infinitesimal kleine Abstandselement dt, aus der Summe wird einIntegral. Auf diesem Wege erhalt man im Grenzfall
An =1T
T∫0
x(t)e−j2πntT dt . (1.37)
Diese Gleichung gibt an, auf welchem Wege die Koeffizienten der Fourier-Reihendarstellung eines periodischen Signals x(t) berechnet werden. Wird inder Reihendarstellung des Signals eine unendlich große Anzahl von Summan-den berucksichtigt, dann konvergiert die Modellfunktion xM an jeder Stelle tgegen das gegebene Signal x. Man kann deshalb auch kurz
1.4 Fourier-Zerlegung 19
x(t) =∞∑
n=−∞Anej2πn
tT (1.38)
schreiben.Der Integrand in Gl. (1.37) ist mit T periodisch. Aus diesem Grund durfen
die Integrationsgrenzen beliebig verschoben werden, solange nur die Intervall-breite dabei unverandert gleich T bleibt. Insbesondere gilt also auch
An =1T
T/2∫−T/2
x(t)e−j2πntT . (1.39)
Diese Form wird im nachsten Abschnitt benotigt.Gl. (1.37) (oder (1.39)) lasst sich auch als ”Transformationsgleichung“ oder
”Abbildung“ bezeichnen. Das Signal x wird dabei abgebildet in die Zahlen-folge An. Gl. (1.38) zeigt dann, wie aus der Abbildung An das Original xwiedergewonnen werden kann; diese Gleichung heißt deshalb auch ”inverseTransformation“ (auch ”Rucktransformation“ oder ”Ruckabbildung“). EineAnalogie zu dieser mathematisch definierten Abbildung besteht z. B. in einemFoto-Positiv und seinem zugehorigen Foto-Negativ. Naturlich sind (bei einemidealen Fotoapparat) Positiv-Bild und Negativ-Bild durch ein geeignetes Ver-fahren auseinander herstellbar, und beide enthalten die gleiche Information.Genauso ist es auch bei der Fourier-Summen-Transformation: Das Signal xwird in An ”mit anderen Mitteln“ dargestellt; Information wird dabei we-der erzeugt noch vernichtet. Trotzdem ist die Anwendung der Transformationsinnvoll: Sie erlaubt die einfache Beschreibung von Ubertragungsvorgangen.
Wie bei der Foto-Analogie ist die Fourier-Summen-Transformation um-kehrbar eindeutig. Jedes periodische Signal besitzt genau eine eindeutige Dar-stellung An.
1.4.2 Fourier-Transformation
Naturlich sollen nicht nur periodische Signale in ihre Frequenzbestandteilezerlegt werden; dies soll auch fur beliebige andere, nicht-periodische Signaledurchgefuhrt werden konnen.
Weil alle praktisch vorkommenden Signale stets einen Anfang und einEnde besitzen, interessieren dabei besonders solche ”einmaligen“ Vorgange,die sich dadurch auszeichnen, dass sie außerhalb eines gewissen, wie auchimmer angebbaren Zeitintervalles - der Signaldauer - gleich Null sein sollen.Die im letzten Abschnitt erarbeiteten Prinzipien lassen sich nun anwenden,wenn aus dem Zeitsignal zunachst ein beliebiges Stuck (das nicht mit derSignaldauer ubereinstimmen muss) herausgeschnitten wird und als beliebig,zunachst vollig willkurlich gewahlte Periodendauer angesehen wird. Das ist imPrinzipbild 1.10 dargestellt. Das Signal wird gedanklich kunstlich periodisch
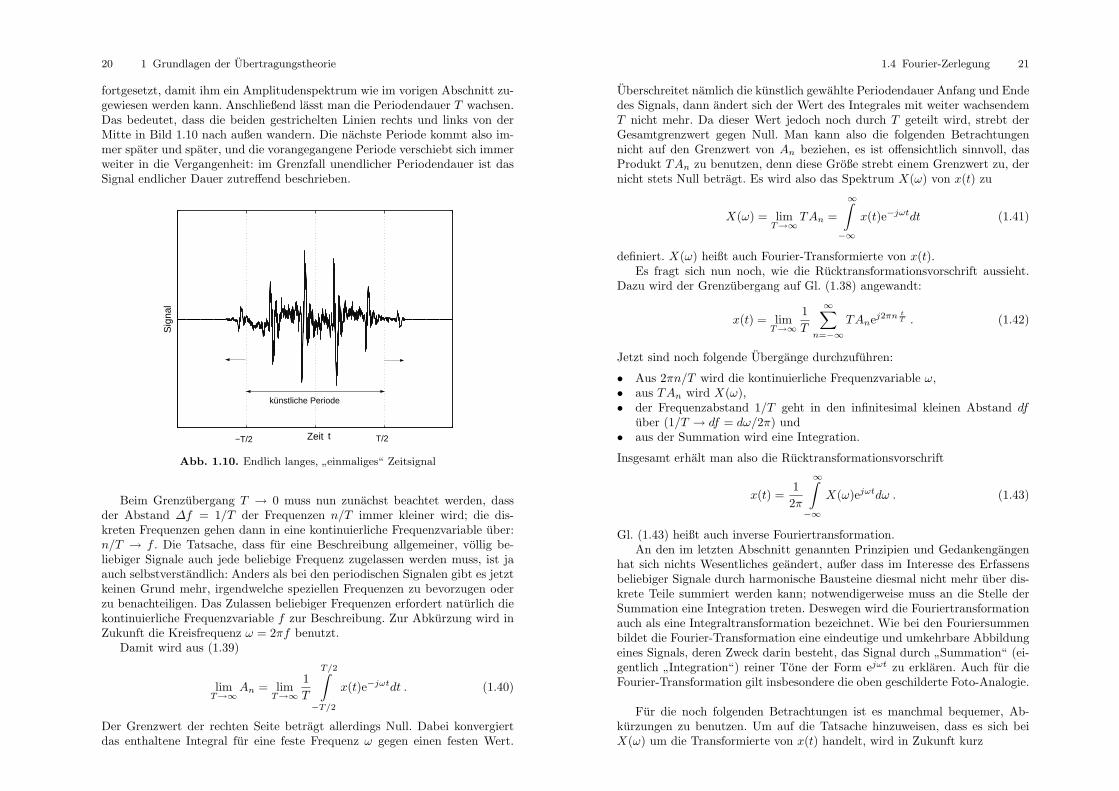
20 1 Grundlagen der Ubertragungstheorie
fortgesetzt, damit ihm ein Amplitudenspektrum wie im vorigen Abschnitt zu-gewiesen werden kann. Anschließend lasst man die Periodendauer T wachsen.Das bedeutet, dass die beiden gestrichelten Linien rechts und links von derMitte in Bild 1.10 nach außen wandern. Die nachste Periode kommt also im-mer spater und spater, und die vorangegangene Periode verschiebt sich immerweiter in die Vergangenheit: im Grenzfall unendlicher Periodendauer ist dasSignal endlicher Dauer zutreffend beschrieben.
Zeit
Sig
nal
−T/2 T/2
künstliche Periode
t
Abb. 1.10. Endlich langes,”einmaliges“ Zeitsignal
Beim Grenzubergang T → 0 muss nun zunachst beachtet werden, dassder Abstand ∆f = 1/T der Frequenzen n/T immer kleiner wird; die dis-kreten Frequenzen gehen dann in eine kontinuierliche Frequenzvariable uber:n/T → f . Die Tatsache, dass fur eine Beschreibung allgemeiner, vollig be-liebiger Signale auch jede beliebige Frequenz zugelassen werden muss, ist jaauch selbstverstandlich: Anders als bei den periodischen Signalen gibt es jetztkeinen Grund mehr, irgendwelche speziellen Frequenzen zu bevorzugen oderzu benachteiligen. Das Zulassen beliebiger Frequenzen erfordert naturlich diekontinuierliche Frequenzvariable f zur Beschreibung. Zur Abkurzung wird inZukunft die Kreisfrequenz ω = 2πf benutzt.
Damit wird aus (1.39)
limT→∞
An = limT→∞
1T
T/2∫−T/2
x(t)e−jωtdt . (1.40)
Der Grenzwert der rechten Seite betragt allerdings Null. Dabei konvergiertdas enthaltene Integral fur eine feste Frequenz ω gegen einen festen Wert.
1.4 Fourier-Zerlegung 21
Uberschreitet namlich die kunstlich gewahlte Periodendauer Anfang und Endedes Signals, dann andert sich der Wert des Integrales mit weiter wachsendemT nicht mehr. Da dieser Wert jedoch noch durch T geteilt wird, strebt derGesamtgrenzwert gegen Null. Man kann also die folgenden Betrachtungennicht auf den Grenzwert von An beziehen, es ist offensichtlich sinnvoll, dasProdukt TAn zu benutzen, denn diese Große strebt einem Grenzwert zu, dernicht stets Null betragt. Es wird also das Spektrum X(ω) von x(t) zu
X(ω) = limT→∞
TAn =
∞∫−∞
x(t)e−jωtdt (1.41)
definiert. X(ω) heißt auch Fourier-Transformierte von x(t).Es fragt sich nun noch, wie die Rucktransformationsvorschrift aussieht.
Dazu wird der Grenzubergang auf Gl. (1.38) angewandt:
x(t) = limT→∞
1T
∞∑n=−∞
TAnej2πntT . (1.42)
Jetzt sind noch folgende Ubergange durchzufuhren:
• Aus 2πn/T wird die kontinuierliche Frequenzvariable ω,• aus TAn wird X(ω),• der Frequenzabstand 1/T geht in den infinitesimal kleinen Abstand df
uber (1/T → df = dω/2π) und• aus der Summation wird eine Integration.
Insgesamt erhalt man also die Rucktransformationsvorschrift
x(t) =1
2π
∞∫−∞
X(ω)ejωtdω . (1.43)
Gl. (1.43) heißt auch inverse Fouriertransformation.An den im letzten Abschnitt genannten Prinzipien und Gedankengangen
hat sich nichts Wesentliches geandert, außer dass im Interesse des Erfassensbeliebiger Signale durch harmonische Bausteine diesmal nicht mehr uber dis-krete Teile summiert werden kann; notwendigerweise muss an die Stelle derSummation eine Integration treten. Deswegen wird die Fouriertransformationauch als eine Integraltransformation bezeichnet. Wie bei den Fouriersummenbildet die Fourier-Transformation eine eindeutige und umkehrbare Abbildungeines Signals, deren Zweck darin besteht, das Signal durch ”Summation“ (ei-gentlich ”Integration“) reiner Tone der Form ejωt zu erklaren. Auch fur dieFourier-Transformation gilt insbesondere die oben geschilderte Foto-Analogie.
Fur die noch folgenden Betrachtungen ist es manchmal bequemer, Ab-kurzungen zu benutzen. Um auf die Tatsache hinzuweisen, dass es sich beiX(ω) um die Transformierte von x(t) handelt, wird in Zukunft kurz
22 1 Grundlagen der Ubertragungstheorie
X(ω) = F{x(t)} =
∞∫−∞
x(t)e−jωtdt (1.44)
geschrieben. Ebenso bedeutet
x(t) = F−1{X(ω)} =1
2π
∞∫−∞
X(ω)ejωtdω , (1.45)
dass x(t) gleich der Rucktransformierten von X(ω) sein moge. Wegen derEindeutigkeit und Umkehrbarkeit heben sich die Operationen F und F−1
gegenseitig auf, d.h., es gilt
F−1{F{x(t)})} = x(t) (1.46)
und ebensoF{F−1{X(ω)}} = X(ω) . (1.47)
Abschließend sei noch angemerkt, dass Signal x(t) und Spektrum X(ω) nichtdie gleiche physikalische Dimension besitzen. Offensichtlich gilt fur die Dimen-sionen
dim[X(ω)] = dim[x(t)]s =dim[x(t)]
Hz. (1.48)
Aus diesem Grund wird X(ω) manchmal auch als Amplitudendichtefunktionbezeichnet.
1.4.3 Die Ubertragungsfunktion und der Faltungssatz
Der Grund fur die Einfuhrung der Fourier-Transformation bestand wie er-wahnt darin, dass sich mit diesem Hilfsmittel die Ubertragung bei linearen undzeitinvarianten Systemen durch eine Multiplikation mit der komplexwertigenUbertragungsfunktion beschreiben lasst. Wegen des Invarianzprinzips folgtaus der Fourierdarstellung des Eingangssignals (1.43), dass der Ausgang stetsdie Gestalt
y(t) =1
2π
∞∫−∞
H(ω)X(ω)ejωtdω (1.49)
besitzen muss. Im Frequenzbereich ist die Ubertragung also beschrieben durchdas Produkt der Fouriertransformierten des Einganges und einer Ubertra-gungsfunktion H(ω), die den Ubertrager charakterisiert; die Fouriertransfor-mierte Y (ω) des Ausganges y(t) besteht in
Y (ω) = H(ω)X(ω) . (1.50)
Immer erlaubt die Ubertragungsfunktion die Berechnung des Ausgangssignalsbei bekanntem Eingang. Andererseits ist in einem der letzten Abschnitte
1.4 Fourier-Zerlegung 23
gezeigt worden, dass die Impulsantwort des Ubertragers diesen ebenfallsvollstandig beschreibt. Auch die Impulsantwort gestattet die Bestimmung desAusganges aus dem Eingang und bildet daher eine ebenso vollstandige Dar-stellung des Ubertragers wie H(ω). Ubertragungsfunktion und Impulsantwortcharakterisieren also ein und die selbe Sache und konnen deshalb nicht un-abhangig voneinander sein; sie mussen im Gegenteil in einem bestimmten,festen Zusammenhang stehen.
Dieser Zusammenhang kann leicht aus dem Faltungsintegral Gl. (1.11)hergeleitet werden. Dazu wird es der Fouriertransformation unterzogen:
Y (ω) = F{y(t)} =
∞∫−∞
∞∫−∞
x(τ)h(t− τ)dτ e−jωtdt . (1.51)
Die Reihenfolge der enthaltenen Integrationen darf umgekehrt werden, d.h. esist
Y (ω) =
∞∫−∞
x(τ)
∞∫−∞
h(t− τ) e−jωt dt dτ , (1.52)
oder
Y (ω) =
∞∫−∞
x(τ)e−jωτ∞∫−∞
h(t− τ) e−jω(t−τ) dt dτ , (1.53)
Das innere Integral besteht gerade in der Fouriertransformierten der Impuls-antwort (der formale Beweis ließe sich durch die Variablensubstitution u =t − τ fuhren), das dann noch verbleibende Integral stellt die TransformierteX(ω) von x(t) dar. Es ist also
Y (ω) = F{h(t)}X(ω) . (1.54)
Durch Vergleich mit (1.50) erhalt man fur den gesuchten Zusammenhang zwi-schen Impulsantwort h(t) und Ubertragungsfunktion H(ω)
H(ω) = F{h(t)} . (1.55)
Die Ubertragungsfunktion ist also die Fouriertransformierte der Impulsant-wort.
Von einem mathematischen Standpunkt aus gesehen ist oben einfach ge-zeigt worden, dass die Faltung im Zeitbereich der Multiplikation im Frequenz-bereich entspricht. Es gilt
X(ω)H(ω) = F∞∫−∞
x(τ)h(t− τ)dτ
, (1.56)
wobei naturlich X(ω) = F{x(t)} und H(ω) = F{h(t)} Fourier-Paare sind.Dieser Zusammenhang wird ”Faltungssatz“ genannt.
24 1 Grundlagen der Ubertragungstheorie
Auch fur ein Produkt zweier zeitlicher Signale gilt der Faltungssatz nurin etwas abgewandelter Form. Wie der Leser leicht durch Rucktransformie-ren des rechtsstehenden ”Faltungsintegrales“ im Frequenzbereich (wie obenvorgefuhrt) zeigen kann ist
x(t)g(t) = F−1
12π
∞∫−∞
X(ν)G(ω − ν)dν
, (1.57)
wobei ebenfalls x,X und g,G Fourierpaare bilden. Die Faltung im Frequenz-bereich entspricht der Multiplikation im Zeitbereich, nur dass hier im Fal-tungsintegral der Faktor 1
2π auftritt.
1.4.4 Symmetrien
Die Symmetrieeigenschaften von Fourier-Transformierten spezieller Signalebilden Grundlagenwissen, das hier kurz erlautert werden soll.
Reellwertige Signale
Das Spektrum eines reellwertigen Verlaufes x(t)
X(ω) =
∞∫−∞
x(t)e−jωtdt .
geht in sich selbst uber, wenn fur ω der Wert von −ω eingesetzt wird undbeide Seiten konjugiert komplex (∗) genommen werden:
X∗(−ω) =
∞∫−∞
x(t)e−jωtdt .
Es gilt also offensichtlichX∗(−ω) = X(ω) . (1.58)
Das Betragsspektrum ist demnach geradsymmetrisch
|X(−ω)|2 = |X(ω)|2 , (1.59)
der Realteil des Spektrums ist ebenfalls geradsymmetrisch
Re{X(−ω)} = Re{X(−ω)} :, (1.60)
der Imaginarteil dagegen ist mit
Im{X(−ω)} = −Im{X(−ω)} :, (1.61)
ungeradsymmetrisch. Das gilt fur jedes reelle Signal unabhangig von seinemVerlauf.
1.4 Fourier-Zerlegung 25
Reellwertige und geradsymmetrische Signale
Ein Signal, das mit xg(−t) = xg(t) geradsymmetrisch ist, besitzt ein reellwer-tiges Spektrum, wie folgende einfache Uberlegungen zeigen. Im Integral
X(ω) =
∞∫−∞
x(t)e−jωtdt =
∞∫−∞
x(t)[cos(ωt)− j sin(ωt)]dt
ist das Produkt x(t) sin(ωt) eine ungeradsymmetrische Funktion, das Integraluber diesen Teil des Integranden ist damit gleich Null. Es bleibt also nur diereellwertige Transformierte
X(ω) =
∞∫−∞
x(t) cos(ωt)dt
ubrig. Der Imaginarteil ist gleich Null, Im{X(ω)} = 0, der Realteil naturlichnach wie vor geradsymmetrisch, Re{X(−ω)} = Re{X(ω)}.
Reellwertige und ungeradsymmetrische Signale
Ein Signal, das mit xu(−t) = −xu(t) ungeradsymmetrisch ist, besitzt ein reinimaginares Spektrum: Im Integral
X(ω) =
∞∫−∞
x(t)[cos(ωt)− j sin(ωt)]dt
ist das Produkt x(t) cos(ωt) eine ungeradsymmetrische Funktion, das Integraluber diesen Teil des Integranden ist damit gleich Null. Es bleibt also nur dieimaginare Transformierte
X(ω) = −j∞∫−∞
x(t) sin(ωt)dt
ubrig. Der Realteil ist gleich Null, Re{X(ω)} = 0, der Imaginarteil naturlichnach wie vor ungeradsymmetrisch, Im{X(−ω)} = −Im{X(ω)}.
Zerlegung in symmetrische und unsymmetrische Anteile
Allgemeine reelle Signale ohne Symmetrieeigenschaften konnen stets wie folgtin einen geradsymmetrischen und einen ungeradsymmetrischen Teil zerlegtwerden:
x(t) =12
[x(t) + x(−t)] +12
[x(t)− x(−t)] = xg(t) + xu(t) . (1.62)
26 1 Grundlagen der Ubertragungstheorie
Darin ist naturlichxg(t) =
12
[x(t) + x(−t)]der gerade Teil und
xu(t) =12
[x(t)− x(−t)]der ungerade Anteil.
Das Spektrum von xg(t) ist reell, das Spektrum von xu(t) rein imaginar.Allgemein kann man daher feststellen, dass die Fouriertransformierte des ge-raden Signalteiles gleich dem Realteil des Gesamtspektrums von x(t) ist:
Re{X(ω)} = F{xg(t)} . (1.63)
Ebenso korrespondiert der ungerade Signalteil mit dem Imaginarteil des Ge-samtspektrums:
jIm{X(ω)} = F{xu(t)} (1.64)
(mit z = Re{z}+ jIm{z} fur jedes komplexe z).
1.4.5 Impulsantworten und Hilbert-Transformation
Die genannte Tatsache, dass geradsymmetrischer und ungeradsymmetrischerSignalanteil mit Real- und Imaginarteil des Spektrums zusammenhangen, hateine interessante Konsequenz fur die Transformierten von Impulsantworten.Letztere bestehen ja aus der Reaktion eines Ubertragers auf die Delta-Funktion δ(t). Die Anregung beginnt also erst im Zeitpunkt t = 0. Aus diesemGrunde kann die Systemantwort h(t) fur negative Zeiten ebenfalls nur gleichNull sein. Nach dem Kausalitatsprinzip (”von nichts kommt nichts“) kanndie Impulsantwort ebenfalls erst in t = 0 (fruhestens) beginnen. Fur kausaleImpulsantworten gilt also
h(t < 0) = 0 .
Nun kann aber andererseits eine Impulsantwort – wie jedes Signal – in geradeund ungerade Anteile zerlegt werden:
h(t) = hg(t) + hu(t) .
Naturlich mussen dabei hg und hu fur Zeiten t < 0 auch negativ gleich großsein, denn nur dann kann die Impulsantwort auch kausal sein. Es muss also
hu(t < 0) = −hg(t < 0)
gelten. Wegen den vorausgesetzten Symmetrieeigenschaften von hg und hufolgt dann fur positive Zeiten
hu(t > 0) = hg(t > 0) ,
oder, zusammengefasst
1.4 Fourier-Zerlegung 27
hu(t) = sign(t) hg(t)
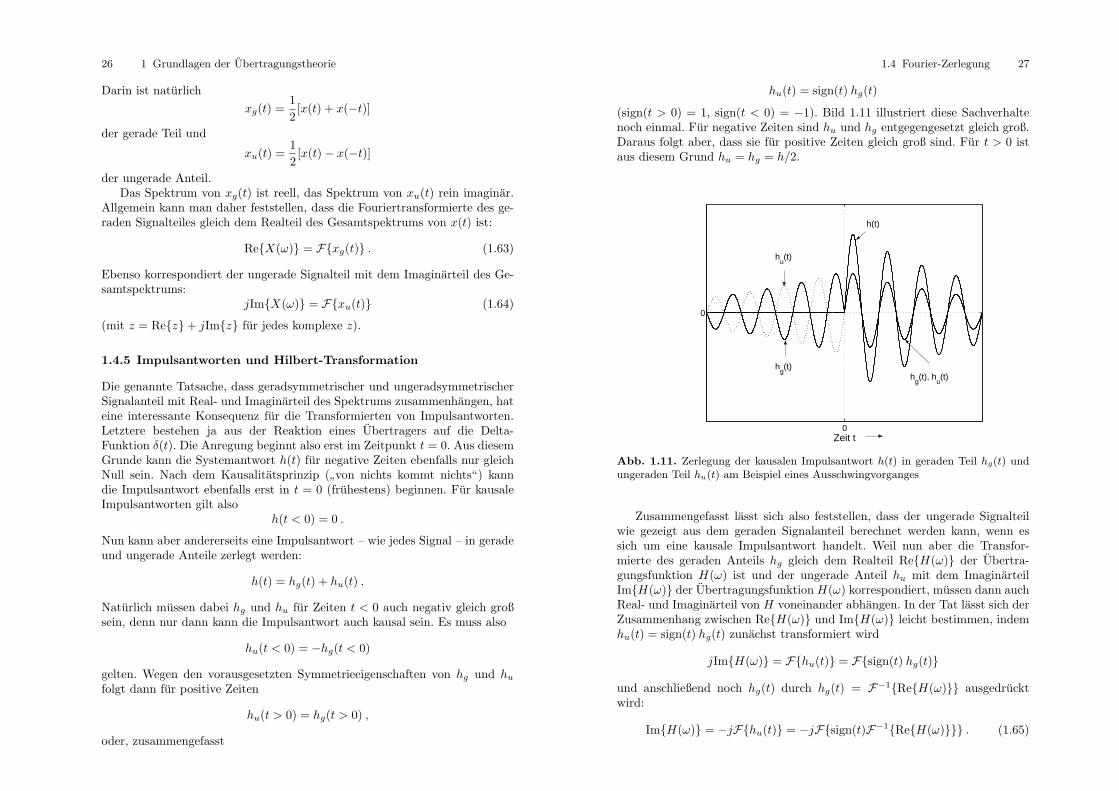
(sign(t > 0) = 1, sign(t < 0) = −1). Bild 1.11 illustriert diese Sachverhaltenoch einmal. Fur negative Zeiten sind hu und hg entgegengesetzt gleich groß.Daraus folgt aber, dass sie fur positive Zeiten gleich groß sind. Fur t > 0 istaus diesem Grund hu = hg = h/2.
0
0
Zeit t
h(t)
hu(t)
hg(t)
hg(t), h
u(t)
Abb. 1.11. Zerlegung der kausalen Impulsantwort h(t) in geraden Teil hg(t) undungeraden Teil hu(t) am Beispiel eines Ausschwingvorganges
Zusammengefasst lasst sich also feststellen, dass der ungerade Signalteilwie gezeigt aus dem geraden Signalanteil berechnet werden kann, wenn essich um eine kausale Impulsantwort handelt. Weil nun aber die Transfor-mierte des geraden Anteils hg gleich dem Realteil Re{H(ω)} der Ubertra-gungsfunktion H(ω) ist und der ungerade Anteil hu mit dem ImaginarteilIm{H(ω)} der Ubertragungsfunktion H(ω) korrespondiert, mussen dann auchReal- und Imaginarteil von H voneinander abhangen. In der Tat lasst sich derZusammenhang zwischen Re{H(ω)} und Im{H(ω)} leicht bestimmen, indemhu(t) = sign(t) hg(t) zunachst transformiert wird
jIm{H(ω)} = F{hu(t)} = F{sign(t) hg(t)}
und anschließend noch hg(t) durch hg(t) = F−1{Re{H(ω)}} ausgedrucktwird:
Im{H(ω)} = −jF{hu(t)} = −jF{sign(t)F−1{Re{H(ω)}}} . (1.65)
28 1 Grundlagen der Ubertragungstheorie
Gl. (1.65) konstatiert den Zusammenhang, in dem Realteil und Imaginarteilder Ubertragungsfunktion eines jeden kausalen (linearen und zeitinvarianten)Ubertragers stehen mussen. Es wurde z. B. bei Messungen, Auswertungenoder theoretischen Berechnungen ausreichen, den Realteil der Ubertragungs-funktion zu bestimmen; der Imaginarteil kann dann aus ihm ausgerechnetwerden.
Die Operationskette auf der rechten Seite von Gl. (1.65) wird ”Hilbert-Transformation“ genannt. Naturlich stellt sie insofern eine Transformationdar, als aus einem Spektrum ein anderes berechnet wird. Sie dient dabeiaber nicht - wie die Fourier-Transformation - der Darstellung eines Signalsdurch viele andere Signale; die Hilbert-Transformation konstatiert im Gegen-teil einen Zusammenhang zwischen Re{H(ω)} und Im{H(ω)} so, dass derdamit bezeichnete Ubertrager sich kausal verhalt.
Fourier-Auswertungen von Messsignalen in Form von Ubertragungsfunk-tionen bestimmen immer die komplexe Ubertragungsfunktion und enthaltendaher eine gewisse Redundanz. Es konnte eine interessante Frage sein, ob sichdiese Redundanz zur Beurteilung z. B. der Gute des Ergebnisses nutzen ließe.
1.5 Wellenleiter
In der theoretischen Akustik ist die Ubertragung von Wellen naturgemaß be-sonders wichtig; deshalb sollen die zugehorigen Begriffe hier kurz erlautertwerden.
Allgemein versteht man unter einer ”Welle“ eine Zustands-beschreibendephysikalische ortliche Große, die zeitlich uber den Wellenleiter transportiertwird: Ein ortlicher Funktionsverlauf lauft zeitlich den Wellenleiter entlang.Beispiele dafur sind:
• Die Oberflachen-Wellen auf dem Meer; die Zustandsgroße konnte hier dieAuslenkung uber dem ”glatten“ Meeresspiegel sein.
• Die Schall-Ausbreitung in (unbegrenzten) Gasen oder Flussigkeiten; dieZustandsgroße konnte hier der (orts - und zeitabhangige Schall-) Drucksein (oder die Schalldichte oder die Schalltemperatur, siehe das folgendeKapitel).
• Und als letztes Beispiel fur an Korper gebundene Wellen seien noch dieVerbiegungen von Staben oder Platten erwahnt (Bild 1.12); Zustandsgroßeist hier die senkrecht auf dem Wellenleiter stehende lokale Auslenkung.
Naturlich ist die Vielfalt der in der Natur auftretenden Wellen sehr großund in den genannten Beispielen bestenfalls angedeutet. Man unterscheidetbei allen Wellen zunachst dispersive und nicht-dispersive Ausbreitung von-einander. Weil ”Dispersion“ mit ”Auseinanderlaufen“ ubersetzt werden kann,versteht man unter ”nicht-dispersiven“ Wellen solche, deren Signalform sichwahrend der Ausbreitung nicht andert. Nicht-dispersive Wellen sind z. B.
1.5 Wellenleiter 29
Luftschallwellen (jedenfalls, wenn Reflexionen keine Rolle spielen); Meeres-wellen sind offensichtlich dispersiv (sonst gabe es keine Brandung), und auchbei den als Beispiel angefuhrten dispersiven Biegewellen ”zerlauft“ die Signal-form wahrend des Wellen-Transportes.
Abb. 1.12. Elastische Verformung eines Stabes zu Biegewellen
Sowohl dispersive als auch nicht-dispersive Wellen konnen beide fur har-monische (= zeitlich sinusformige) Anregung auf gleiche Weise beschriebenwerden. Wenn (wie jetzt angenommen wird) der Wellenleiter selbst linear undzeitinvariant ist, dann muss seine Reaktion den gleichen Zeitverlauf wie dieAnregung besitzen, und das muss auch im dispersiven Fall zutreffen. An jederStelle des Wellenleiters liegt ebenfalls eine zeitlich harmonische Zustandsgroßevor, nur dass naturlich Amplitude und Phase von Ort zu Ort variieren konnen.Man kann also stets fur die Zustandsgroße f
f = f0 V (x, y, z) Re{e−jφ(x,y,z)ejωt} (1.66)
notieren. Hierin sei f0 eine von der Quelle bedingte Große (z. B. lasst sichf0 bei elektroakustischen Anlagen einfach durch den Lautstarkeregler beein-flussen). V bezeichnet die entlang des Wellenleiters sich andernde Amplitude(V > 0 und reell) und φ(x, y, z) die ortsabhangige Phasendifferenz.
Fur (vermutlich) alle bekannten akustischen Wellenleiter zeigt sich nun imeindimensionalen Fall ohne Reflexionen und ohne Dampfung, dass
V (x, y, z) = 1 (1.67)
gilt: weil keine Energie aus dem System entnommen wird, kann die Amplitudenicht abnehmen, aber naturlich auch nicht anwachsen. Die noch vorhandenePhasenverschiebung φ(x) lasst sich immer auch als eine Zeitverschiebung τdeuten
f = f0 Re{e−jφ(x)ejωt} = f0 cos (ωt− φ(x)) = f0 cos (ω(t− τ))
mit φ = ωτ . Meist wird die Laufzeit zwischen zwei Punkten proportional zumAbstand zwischen diesen Punkten sein, in diesen Fallen gilt also
φ = ωτ = ωx/c . (1.68)
Darin ist c die Ausbreitungsgeschwindigkeit der Welle (= von der Wellezuruckgelegter Weg x, geteilt durch die dafur benotigte Zeit τ). Zusammen-gefasst kann also die eindimensionale Wellenausbreitung (ohne Reflexion und

30 1 Grundlagen der Ubertragungstheorie
ohne Dampfung) bei harmonischer Anregung stets durch die komplexe Wel-lenfunktion
f = f0e−jωx/c (1.69)
beschrieben werden, wobei man den Zeitverlauf durch bilden des Realteilsnach
f(x, t) = Re{fejωt} (1.70)
erhalt.Meist kurzt man das jetzt stets vorkommende Verhaltnis aus Frequenz und
Wellengeschwindigkeit c ab und definiert die Wellenzahl
k =ω
c. (1.71)
In ihr ist die ortliche Periodenlange, die man als Wellenlange λ bezeichnet,mit
k =2πλ. (1.72)
enthalten. Offensichtlich gilt fur samtliche Wellenarten
λ =c
f. (1.73)
Es seien nun zusammengesetzte Signale mit mehreren Frequenzbestandtei-len betrachtet. Im nicht-dispersiven Fall ist die Ausbreitungsgeschwindigkeitc offensichtlich fur alle Frequenzen gleich: alle an einer gewissen Stelle x vor-gefundenen harmonischen Anteile mussen mit der gleichen Geschwindigkeitlaufen, wenn die Signalform ihrer Summe an einer anderen Stelle unverandertsein soll. In einer Frequenzgruppe weisen also im nicht-dispersiven Fall alleGruppen-Mitglieder die gleiche Geschwindigkeit auf.
Gerade das Gegenteil gilt nun naturlich fur die dispersive Ausbreitung. AlleMitglieder einer Frequenzgruppe laufen mit unterschiedlichen Geschwindigkei-ten, und deshalb verandert sich auch die Signalform beim Wellentransport.Die Ausbreitungsgeschwindigkeit ist hier demnach frequenzabhangig
c = c(ω) .
Um darauf hinzuweisen, dass c jetzt nur noch eine vernunftige Beschreibungfur monofrequente Vorgange abgibt, ersetzt man die Bezeichnung ”Ausbrei-tungsgeschwindigkeit“ durch ”Phasengeschwindigkeit“. Im Fall ohne Disper-sion wurde sich diese Unterscheidung eigentlich erubrigen, man sagt dann,dass die Phasengeschwindigkeit gleich der Ausbreitungsgeschwindigkeit ist.
Im nicht-dispersiven Fall ist also die Frage nach der Geschwindigkeit einesaus mehreren Frequenzen zusammengesetzten Signals bereits geklart; wie aberkann man die ”Geschwindigkeit“ einer dispersiven Frequenzgruppe allgemeineinschatzen? Eine Antwort erfordert naturgemaß eine Einschrankung hinsicht-lich der zugelassenen Frequenzbestandteile. Fur breitbandige Vorgange wird
1.5 Wellenleiter 31
es kaum moglich sein, allgemeine Aussagen zu treffen, weil es hier gewissauf jeden speziellen Fall ankommt. Fur schmalbandige Gruppen hingegen las-sen sich leicht zu verstehende und ubersichtliche Feststellungen treffen, wieder einfachste Fall der Uberlagerung aus zwei Wellen gleicher Amplitude mitden nur wenig unterschiedlichen Frequenzen ω1 und ω2 und den zugehori-gen Wellenzahlen k1 und k2 zeigt. Diese Signalsumme bildet die sogenannte
”Schwebung“
sin(ω1t− k1x) + sin(ω2t− k2x)
= 2 sin(ω1 + ω2
2t− k1 + k2
2x
)cos(ω1 − ω2
2t− k1 − k2
2x
). (1.74)
Das Summensignal besteht also aus einer ”Tragerwelle“ und einer ”langsam“an- und abschwellenden ”Einhullenden“. Dabei besitzt die Tragerwelle diemittlere Kreisfrequenz (ω1 + ω2)/2 und die mittlere Wellenzahl (k1 + k2)/2.Die Einhullende moduliert die Amplitude der Tragerwelle gemaß der Kosinus-funktion in (1.74) mit der viel niedrigeren Frequenz (ω1 − ω2)/2 und der vielniedrigeren Wellenzahl (k1−k2)/2. Wahrend sich aber nun die Trager-Wellenmit der mittleren Phasengeschwindigkeit
c =ω1 + ω2
k1 + k2(1.75)
ausbreiten, ist fur die Hullkurven die Gruppengeschwindigkeit
cG =ω1 − ω2
k1 − k2=∆ω
∆k(1.76)
maßgebend. Im Grenzfall, bei dem die Frequenzen und Wellenzahlen beliebigdicht beieinander liegen, ist cG durch die Ableitung
cG =dω
dk=
1dk/dω
(1.77)
gegeben. Die so definierte Gruppengeschwindigkeit cG ist nun nicht nur maß-gebend fur die Hullkurve einer Schwebung nach (1.74), sondern allgemein furdie Hullkurven aller Vorgange, die sich aus beliebig vielen benachbarten Wel-lenzugen mit beliebigen Amplituden und Phasen-Winkeln zusammensetzenlassen.
2
Die akustischen Zustandsgleichungen in Gasen
2.1 Die Zustandsgroßen
Bekanntlich wird der Zustand von Gasen durch drei Großen, namlich durchden Druck pG, durch die Dichte %G und durch die Temperatur TG beschrie-ben. Alle drei Großen erfahren bei Beschallung des Gases eine (sehr) kleineAnderung. Zum Ruhedruck p0, zur Ruhedichte %0 und zur RuhetemperaturT0 treten kleine, durch das Schallfeld bedingte Anderungen p, % und T hinzu.Fur die Gesamtgroßen gilt also
pG = p0 + p , (2.1)
%G = %0 + % (2.2)
undTG = T0 + T . (2.3)
Dabei bestehen die Schallfeldgroßen Schalldruck p, Schalldichte % und Schall-temperatur T in Feldern. Darunter versteht man orts- und zeitabhangigeFunktionen, es ist demnach
p = p(x, y, z, t) ,
% = %(x, y, z, t)
undT = T (x, y, z, t) .
Alsbald geschilderte Uberlegungen werden zeigen, dass die Signalformen derdrei Schallfeldgroßen (bis auf Skalierungskonstante) untereinander (zeitlichund ortlich) gleich sind. Ein lokaler, momentaner Uberdruck (durch Schall)beispielsweise geht also stets einher mit einer ebensolchen Uberdichte undeiner ebensolchen Uber-Temperatur.
Zum Schluss sei noch ein Hinweis auf die zu erwartenden Großenordnun-gen der Zahlenwerte gegeben. Wahrend der statische Ruhedruck (etwa) bei
34 2 Die akustischen Zustandsgleichungen in Gasen
p0 = 100.000 N/m2 = 105 N/m2 liegt, betragt der Effektivwert des Schall-druckes bei einem schon als sehr laut empfundenen Schallpegel von 100 dBnur etwa peff = 2 N/m2 und ist damit um etwa 5 Großenordnungen kleiner.Aus diesem Grund kann man Produkte von Schallfeldgroßen gegenuber linea-ren Ausdrucken in ihnen stets vernachlassigen; der dadurch bedingte Fehler istaußerordentlich klein. Auch Experimente belegen deshalb, dass die Schallaus-breitung selbst bei den hochsten (fur den Menschen noch ertraglichen) Pegelnkeine nachweisbaren Nichtlinearitaten enthalt.
2.2 Zustandsgleichungen fur die Gesamtgroßen
Die beiden Zusammenhange zwischen den genannten drei Zustandsgroßen furGase bestehen bekanntlich in den beiden im Folgenden genannten Beziehun-gen (eine etwas ausfuhrlichere Begrundung kann man z. B. dem Buch Tech-nische Akustik von M. Moser (7. Auflage, Springer Verlag Berlin 2007) ent-nehmen.
2.2.1 Boyle-Mariotte-Gleichung
Die Erwartungen, die man vernunftigerweise an eine feste Gasmasse (die bei-spielsweise in einem Gefaß mit veranderlichem Volumen untergebracht ist)richten wird, lassen sich etwa so beschreiben:
• Aufheizen des Gases wird bei konstantem Volumen eine DruckerhohungpG ∼ TG nach sich ziehen und
• der Druck im Gas ist umgekehrt proportional zu seinem Volumen, pG ∼1/VG.
Stellt man noch in Rechnung, dass eine vergroßerte Masse (bei konstan-tem Druck und bei konstanter Temperatur) auch einen großeren Platzbe-darf besitzt, so lassen sich diese Aussagen in der sogenannten Boyle-Mariotte-Gleichung zusammenfassen. Sie lautet
pGVG =M
MmolRTG . (2.4)
Dabei ist unter Mmol eine Materialkonstante, namlich die sogenannte ”molareMasse“, zu verstehen. Mmol bezeichnet das ”Molekulargewicht in Gramm“ desbetreffenden Stoffes. Zum Beispiel ist (siehe das Periodensystem der Elemente)Mmol(N2) = 28 g und Mmol(O2) = 32 g, daraus ergibt sich Mmol(Luft) =28, 8 g (bekanntlich besteht die Luft zu etwa 20% aus Sauerstoff und zu etwa80% aus Stickstoff). R = 8, 314 Nm/K (K=Kelvin=Maßeinheit der absolutenTemperatur, 0 ◦C = 273 K) ist die allgemeine Gaskonstante.
Bei der Beschreibung von Schallfeldern kann man ”feste Massen“ und
”veranderliche Volumina“ nicht gebrauchen. Man benotigt dafur die Dichte
2.2 Zustandsgleichungen fur die Gesamtgroßen 35
statt des Volumens und der Masse, fur ”akustische Zwecke“ wird deshalb(2.4) in
pG =R
Mmol%GTG (2.5)
umgeformt.Jeder beliebige, mogliche Zustand aller idealen Gase muss die genannte
Boyle-Mariotte-Gleichung erfullen. Das gilt fur jeden Zustand mit Schall, abernaturlich auch fur den Fall der Ruhe mit p = % = T = 0. Es gilt also alsSonderfall von Gl. (2.5) insbesondere auch
p0 =R
Mmol%0T0 . (2.6)
Um Missverstandnissen vorzubeugen sei noch darauf hingewiesen, dass dieBoyle-Mariotte-Gleichung (2.5) fur die jeweils aus der Summe von Ruhegroßeund Schallgroße bestehenden Gesamtgroßen und nicht etwa fur die Schall-feldgroßen alleine gilt, wie die Herleitung zeigt. Formal ausgedruckt: man kannalso in ihr zwar die Schallgroßen (fur den Fall ohne Schall) weglassen, nichtaber die Ruhegroßen: einen Zustand ohne letztere gibt es nicht, weil dann garkein Gas mehr vorhanden ist.
2.2.2 Adiabatische Zustandsgleichung
Bekanntlich kann man Experimente mit isothermer (gleichbleibende Tempera-tur), isobarer (gleichbleibender Druck) oder isochorer (gleichbleibende Dichte)Zustandsanderung eines Gases nur durchfuhren, wenn dabei fur einen Warme-leitungsprozess gesorgt wird. Zum Beispiel ließen sich diese Versuche mit einerfesten Gasmasse in einem Kolben mit veranderbarem Volumen durchfuhren.Wenn man das Volumen des Kolbens plotzlich reduziert, so wird man mitHilfe eines Thermometers feststellen konnen, dass dann gleichzeitig die Tem-peratur des Gases im Inneren steigt. Nur wenn man also lange genug wartetbzw. die Volumenanderung sehr langsam und allmahlich vollzieht, wenn dabeialso ein Warmetransport von innen nach außen moglich gemacht wird, kannman wirklich auch einen isothermen Versuch durchfuhren. Das gleich gilt furdie beiden anderen genannten Experimente. So lasst sich der isochore Versuch(der beim Kolbenversuch ja gleichzeitig auch konstantes Volumen verlangt)ohnedies nur durch Aufheizen des Gases bewerkstelligen, das dann naturlicheine Druckanderung nach sich zieht. Und schließlich setzt der isobare Versucheine frei bewegliche Kolbenwand voraus, die den Druckausgleich zwischen in-nen und außen herstellt, wenn das innere Gas aufgeheizt wird.
Isotherme, isobare und isochore Verdichtungen sind also langsame, anWarmeleitung gebundene Vorgange. Nun vollziehen sich aber gerade Zu-standsanderungen durch Schall gewiss so rasch, dass die Warmeleitung imGas (von den allertiefsten Frequenzen vielleicht abgesehen) ganz gewiss keineRolle spielen kann. Warmeleitungsvorgange sind so langsam, dass sie der sehr

36 2 Die akustischen Zustandsgleichungen in Gasen
raschen zeitlichen Anderung im Schallfeld nichts anhaben konnen. Und ausdiesem Grund konnen Schallvorgange nicht isotherm und naturlich schon garnicht isobar oder isochor verlaufen.
Zustandsanderungen, die ohne Warmetransport auskommen, nennt manadiabatisch. Fur feste Gasmassen in einem veranderbaren Volumen VG giltfur sie die adiabatische Zustandsgleichung
pGp0
=(VGV0
)−κ. (2.7)
Naturlich wird auch in dieser Gleichung das Volumen wieder fur akustischeZwecke durch die Dichte ausgedruckt, was wegen der unveranderlichen Masseohne weiteres moglich ist:
pGp0
=(%G%0
)κ. (2.8)
Vielleicht ist der nochmalige Vermerk angebracht, dass auch diese Gleichungfur die Gesamtgroßen gilt (und keineswegs fur die Schallfeldgroßen alleine).Dass sie von den Ruhegroßen ohne Schall erfullt wird, das ist offensichtlich.
2.3 Zustandsgleichungen fur die Schallfeldgroßen
Soweit also die Schilderung der beiden Zustandsgleichungen fur ideale Gaseohne Warmeleitung. Naturlich fragt sich nun noch, was aus diesen beidenZustandsgleichungen fur die Schallfeldgroßen p, % und T folgt. Die Antwortdarauf ergibt sich einfach durch Einsetzen der Gesamtgroßen nach den Glei-chungen (2.1), (2.2) und (2.3). Es wird mit der Boyle-Mariotte-Gleichung (2.5)begonnen:
p0 + p =R
Mmol(%0 + %)(T0 + T ) ≈ R
Mmol(%0T0 + %0T + T0%) . (2.9)
Im letzten Schritt ist das (quadratisch kleine) Produkt aus Schalltemperaturund Schalldichte %T vernachlassigt worden. Weil wie gesagt auch die statischenRuhegroßen selbst die Boyle-Mariotte-Gleichung (2.5) erfullen (es gilt alsop0 = R%0T0/Mmol), folgt aus der letzten Gleichung fur die Schallfeldgroßen
p =R
Mmol(%0T + T0%) . (2.10)
Etwas ubersichtlicher wird diese Gleichung noch, wenn man durch den Ruhe-druck p0 teilt, man erhalt dann namlich
p
p0=
%
%0+T
T0. (2.11)
2.3 Zustandsgleichungen fur die Schallfeldgroßen 37
Wenn man die auftretenden Quotienten als ”relative Großen“ bezeichnet, dannbesagt (2.11), dass der relative Schalldruck gleich der Summe aus relativerSchalldichte und relativer Schalltemperatur ist.
Den zweiten Zusammenhang zwischen den Schallfeldgroßen liefert die adia-batische Zustandsgleichung (2.8), die im Folgenden noch auf die vergleichs-weise sehr kleinen Schallfeldgroßen zugeschnitten wird.
Zunachst ist festzustellen, dass die adiabatische Zustandsgleichung (2.8)einen nichtlinearen Zusammenhang zwischen Druck und Dichte im Gas kon-statiert. Andererseits interessieren nur kleinste Anderungen um den Arbeits-punkt (%0, p0); deshalb kann die gekrummte Kennlinie (2.8) durch ihre Tan-gente in diesem Arbeitspunkt ersetzt werden. Anders ausgedruckt: Die Kenn-linie kann linearisiert werden, weil quadratische Anteile und alle hoheren Po-tenzen der Taylorentwicklung vernachlassigt werden konnen.
Dazu werden die Schallfeldgroßen zunachst in die fur die Gesamtgroßengeltende adiabatische Zustandsgleichung (2.8) eingesetzt:
p0 + p
p0= 1 +
p
p0=(%0 + %
%0
)κ=(
1 +%
%0
)κ. (2.12)
Die nach dem linearen Glied abgebrochene Potenzreihen-Entwicklung vonf(x) = (1 + x)κ um x = 0 besteht in f(x) = 1 + κx, also gilt
1 +p
p0= 1 + κ
%
%0.
Die linearisierte, auf die Zwecke der Akustik zugeschnittene adiabatische Zu-standsgleichung lautet also
p
p0= κ
%
%0. (2.13)
Weil der Schalldruck eine gut durch Mikrophone messbare Große bildet, dieSchalldichte dagegen nur indirekt aus dem Druck bestimmt werden kann, wer-den Schallfelder fast immer durch Angabe ihrer Druckverteilung beschrieben.Deswegen werden auch alle nachfolgenden Betrachtungen – soweit moglich –durch Drucke formuliert. Dazu muss dann die moglicherweise vorkommendeSchalldichte noch durch den Druck ersetzt werden. Deshalb wird (2.13) nachder Dichte aufgelost
% =p
c2, (2.14)
mitc2 = κ
p0
%0. (2.15)
Wie man erkennt, sind Schalldruck und Schalldichte gleiche Zeit- und Orts-funktionen. Eliminiert man mit Hilfe von (2.13) noch in (2.11) die relativeDichte, so erhalt man fur die relative Schalltemperatur
T
T0=
p
p0− %
%0=(
1− 1κ
)p
p0.
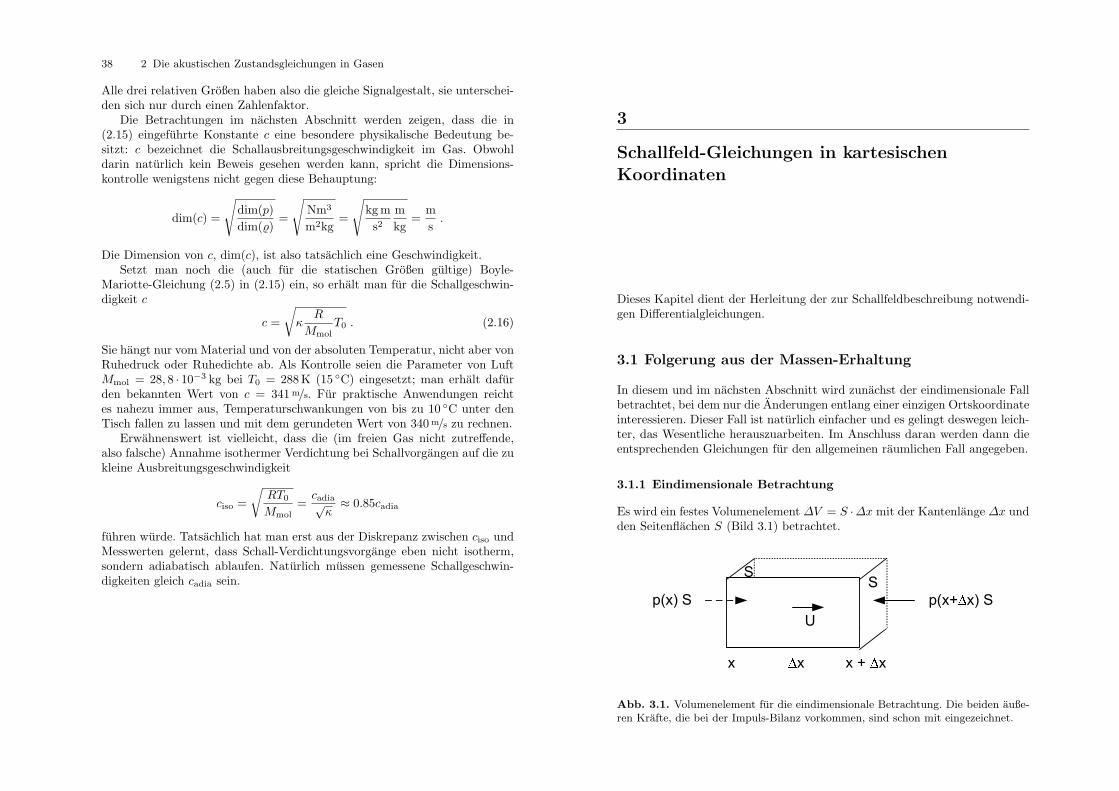
38 2 Die akustischen Zustandsgleichungen in Gasen
Alle drei relativen Großen haben also die gleiche Signalgestalt, sie unterschei-den sich nur durch einen Zahlenfaktor.
Die Betrachtungen im nachsten Abschnitt werden zeigen, dass die in(2.15) eingefuhrte Konstante c eine besondere physikalische Bedeutung be-sitzt: c bezeichnet die Schallausbreitungsgeschwindigkeit im Gas. Obwohldarin naturlich kein Beweis gesehen werden kann, spricht die Dimensions-kontrolle wenigstens nicht gegen diese Behauptung:
dim(c) =
√dim(p)dim(%)
=
√Nm3
m2kg=
√kg m
s2
mkg
=ms.
Die Dimension von c, dim(c), ist also tatsachlich eine Geschwindigkeit.Setzt man noch die (auch fur die statischen Großen gultige) Boyle-
Mariotte-Gleichung (2.5) in (2.15) ein, so erhalt man fur die Schallgeschwin-digkeit c
c =√κ
R
MmolT0 . (2.16)
Sie hangt nur vom Material und von der absoluten Temperatur, nicht aber vonRuhedruck oder Ruhedichte ab. Als Kontrolle seien die Parameter von LuftMmol = 28, 8 · 10−3 kg bei T0 = 288 K (15 ◦C) eingesetzt; man erhalt dafurden bekannten Wert von c = 341 m/s. Fur praktische Anwendungen reichtes nahezu immer aus, Temperaturschwankungen von bis zu 10 ◦C unter denTisch fallen zu lassen und mit dem gerundeten Wert von 340 m/s zu rechnen.
Erwahnenswert ist vielleicht, dass die (im freien Gas nicht zutreffende,also falsche) Annahme isothermer Verdichtung bei Schallvorgangen auf die zukleine Ausbreitungsgeschwindigkeit
ciso =√
RT0
Mmol=cadia√κ≈ 0.85cadia
fuhren wurde. Tatsachlich hat man erst aus der Diskrepanz zwischen ciso undMesswerten gelernt, dass Schall-Verdichtungsvorgange eben nicht isotherm,sondern adiabatisch ablaufen. Naturlich mussen gemessene Schallgeschwin-digkeiten gleich cadia sein.
3
Schallfeld-Gleichungen in kartesischenKoordinaten
Dieses Kapitel dient der Herleitung der zur Schallfeldbeschreibung notwendi-gen Differentialgleichungen.
3.1 Folgerung aus der Massen-Erhaltung
In diesem und im nachsten Abschnitt wird zunachst der eindimensionale Fallbetrachtet, bei dem nur die Anderungen entlang einer einzigen Ortskoordinateinteressieren. Dieser Fall ist naturlich einfacher und es gelingt deswegen leich-ter, das Wesentliche herauszuarbeiten. Im Anschluss daran werden dann dieentsprechenden Gleichungen fur den allgemeinen raumlichen Fall angegeben.
3.1.1 Eindimensionale Betrachtung
Es wird ein festes Volumenelement ∆V = S ·∆x mit der Kantenlange ∆x undden Seitenflachen S (Bild 3.1) betrachtet.
Abb. 3.1. Volumenelement fur die eindimensionale Betrachtung. Die beiden auße-ren Krafte, die bei der Impuls-Bilanz vorkommen, sind schon mit eingezeichnet.

40 3 Schallfeld-Gleichungen in kartesischen Koordinaten
Wenn nun das Medium mit einer x-gerichteten Geschwindigkeit u(x) inBewegung ist, so erhalt das Volumenelement wahrend der Zeit ∆t einen Netto-Massen-Zufluss ∆M , der gleich der Differenz aus links zufließender Masse undrechts abfließender Masse ist:
∆M = %G(x) ·u(x) ·∆t ·S − %G(x+∆x) ·u(x+∆x) ·∆t ·S= [%G(x) ·u(x)− %G(x+∆x) ·u(x+∆x)] ·S ·∆t .
Andererseits muss naturlich die Zu- oder Abnahme von im Volumenelement∆V gespeicherter Masse in einer entsprechenden Zu- oder Abnahme der innenvorhandenen Dichte resultieren:
∆M = [%G (t+∆t)− %G (t)] ·∆x ·S .
Zusammenfassend ist also:
%G(t+∆t)− %G(t)∆t
=%G(x) ·u(x)− %G(x+∆x) ·u(x+∆x)
∆x,
oder, nach dem Grenzubergang ∆t→ 0 und ∆x→ 0
∂%Gu
∂x+∂%G∂t
= 0 . (3.1)
Diese sogenannte ”Kontinuitatsgleichung“ ist - die Herleitung zeigte es - nureine Folge des Prinzips der Massen-Erhaltung.
3.1.2 Dreidimensionale Betrachtung
Im allgemeinen dreidimensionalen Fall betragt der Massen-Zufluss in ein Vo-lumenelement mit den Kantenlangen ∆x, ∆y und ∆z wahrend ∆t
∆M = [%G(x) ·ux(x)− %G(x+∆x) ·ux(x+∆x)] ·∆y∆z∆t+ [%G(y) ·uy(y)− %G(y +∆y) ·uy(y +∆y)] ·∆x∆z∆t+ [%G(z) ·uz(z)− %G(z +∆z) ·uz(z +∆z)] ·∆x∆y∆t ,
der sich in einer Dichte-Anderung gemaß
∆M = [%G(t+∆t)− %G(t)]∆x∆y∆z
niederschlagen muss.
Zusammenfassend gilt also nach gleicher Vorgehensweise wie oben und∆x→ 0, ∆y → 0 und ∆t→ 0
∂%Gux∂x
+∂%Guy∂y
+∂%Guz∂z
+∂%G∂t
= 0 . (3.2)
3.2 Folgerungen aus der Impuls-Erhaltung 41
3.2 Folgerungen aus der Impuls-Erhaltung
3.2.1 Eindimensionale Betrachtung
Das Volumenelement (siehe Bild 3.1) kann einen Impuls-Zuwachs ∆I wahrendder Zeit ∆t auf zwei Weisen erfahren (∆I = ∆I1 +∆I2): einmal wirken außere(Druck-) Krafte auf es ein, deren Impuls-Zuwachs
∆I1 = [pG(x)− pG(x+∆x)] ·S ·∆t
ist. Zum anderen transportiert die wahrend ∆t zu-/abfließende Masse gleich-falls einen zu-/abfließenden Impuls. Es ist also:
∆I2 = %G(x) ·u(x) ·S ·∆t︸ ︷︷ ︸Massenzufluß
·u(x)
︸ ︷︷ ︸Impulszufluß
− %G(x+∆x) ·u(x+∆x) ·S ·∆t︸ ︷︷ ︸Massenabfluß
·u(x+∆x).
︸ ︷︷ ︸Impulsabfluß
Naturlich geht die Anderung des in ∆V gespeicherten Impulses mit einerAnderung des Produktes aus Masse und Geschwindigkeit des Volumenele-ments einher:
∆I = [%G(t+∆t) ·u(t+∆t)− %G(t) ·u(t)] ·∆x ·S .
Zusammenfassend ist also
pG (x)− pG (x+∆x)∆x
+%G (x) ·u2 (x)− %G (x+∆x) u2 (x+∆x)
∆x
=%G (t+∆t) u (t+∆t)− %G (t) u (t)
∆t,
oder, nach Grenzubergang ∆x→ 0 bzw. ∆t→ 0
∂(%Gu)∂t
+∂pG∂x
+∂(%Gu2)∂x
= 0 . (3.3)
3.2.2 Dreidimensionaler Fall
Da der Impuls eine vektorielle Große ist, muss man komponentenweise vor-gehen. Betrachtet sei deshalb nur der x-gerichtete Impuls. Der Anteil ∆I1durch den außeren Druck bleibt gleich. Bei dem wegen der einfließendenMasse hinzukommenden Impuls ∆I2 dagegen muss noch die durch die an-deren vier Seitenflachen ”oben“, ”unten“, ”hinten“ und ”vorne“ stromendenImpulse berucksichtigt werden

42 3 Schallfeld-Gleichungen in kartesischen Koordinaten
∆I2 = %G(x) ·u2x(x)∆y∆z∆t− %G(x+∆x)u2
x(x+∆x)∆y∆z∆t︸ ︷︷ ︸links-rechts
+ %G(y)uy(y)∆x∆z∆t︸ ︷︷ ︸Massenzufluß
ux(y)
︸ ︷︷ ︸x-Impulszufluß
−%G(y +∆y)uy(y +∆y)∆x∆z∆t ux(y +∆y)
︸ ︷︷ ︸vorn-hinten
+ %G(z)uz(z)∆x∆y∆t︸ ︷︷ ︸Massenzufluß
ux(z)
︸ ︷︷ ︸x-Impulszufluß
−%G(z +∆z)uz(z +∆z)∆x∆y∆t ux(z +∆z).
︸ ︷︷ ︸unten-oben
Es ist also
%G(t+∆t) ·ux(t+∆t)− %G(t) ·ux(t)∆t
=pG(x)− pG(x+∆x)
∆x+%G(x) ·u2
x(x)− %G(x+∆x) ·u2x(x+∆x)
∆x
+%G(y)ux(y)uy(y)− %G(y +∆y) ·ux(y +∆y)
∆y
+%G(z)ux(z)uz(z)− %G(z +∆z) ·ux(z +∆z)uz(z +∆z)
∆z,
oder
∂(%Gu)∂t
+∂pG∂x
+∂(%Gu2
x)∂x
+∂(%Guxuy)
∂y+∂(%Guxuz)
∂z= 0 .
Spatestens an dieser Stelle wird das Ausschreiben der Einzelkomponentenumstandlich. Legt man fest, dass ein beigestellter Index von 1 die x-Richtung,2 die y-Richtung und 3 die z-Richtung bezeichnen soll, so gilt:
∂(%Guj)∂t
+∂pG∂xj
+3∑i=1
∂(%Guiuj)∂xi
= 0 , j= 1, 2, 3 . (3.4)
Fur j = 1 wurde die Gleichung oben abgeleitet. Es wird dem Leser nichtschwer fallen, dies auch fur j = 2 und j = 3 gegebenenfalls selbst durch-zufuhren.
3.3 Lighthill-Gleichung und Wellengleichung
3.3.1 Eindimensionaler Fall
Die Lighthill-Gleichung stellt nur eine Zusammenfassung der in den beidenletzten Abschnitten dargelegten Sachverhalte dar. Differenziert man (3.1)
3.3 Lighthill-Gleichung und Wellengleichung 43
nach t und (3.4) nach x, so kann man den Term ∂2(%Gu)∂x∂t eliminieren und
erhalt die eindimensionale Lighthill-Gleichung
∂2pG∂x2
− ∂2%G∂t2
+∂2%Gu
2
∂x2= 0 . (3.5)
Sie ist die allgemeinste Form der Beschreibung von (eindimensionalen) dyna-mischen Vorgangen in Gasen, d. h. sie enthalt noch alle Nichtlinearitaten, wieden Einfluss von Stromungen und die Krummung der Adiabatenkurve, Ver-nachlassigungen sind nicht getroffen (Ausnahme: Einfluss der Viskositat). Furdie meisten interessierenden Falle (mit einigen Ausnahmen, wie Turbulenzenund Nichtlinearitaten bei sehr hohen Schalldrucken) kann man die Lighthill-Gleichung erheblich vereinfachen. Man geht dazu wieder von im Verhaltnis zuden statischen Bedingungen p0, %0 kleinen uberlagerten Wechselgroßen aus
pG = p0 + p
%G = %0 + % .
Wenn jetzt der Fall ohne Gleichstromung betrachtet wird, dann wird die Ge-schwindigkeit u zur Schallschnelle u = v. Geht man weiter von konstantenstatischen Bedingungen aus
∂p0
∂x=∂%0
∂t=∂%0
∂x= 0 ,
so folgt unter Benutzung der linearisierten Adiabatengleichung (2.14):
∂2p
∂x2− 1c2∂2p
∂t2+∂2 (%0 + %) v2
∂x2= 0 .
Zunachst kann man im letzten Term die Wechseldichte % gegenuber der Ru-hedichte %0 vernachlassigen. Die folgende Abschatzung der Großenordnungenzeigt, dass auch der dann noch verbleibende Ausdruck %0v
2 sehr klein ist ge-genuber dem Schalldruck p. Fur ebene Wellen gilt bekanntlich v = p/(%0c).In Amplituden gedacht ist also %0v
2 = p2/(%0c2) und damit:
%0v2
p=
p
%0c2=
p
κp0
(mit c2 = κp0/%0). Fur Luftschall mit Pegeln von weniger als 137 dB (!) istdie rechte Seite jedenfalls kleiner als 10−3. Also kann man %0v
2 gegenuber pvernachlassigen. Damit erhalt man die Wellengleichung
∂2p
∂x2− 1c2∂2p
∂t2= 0 (3.6)
fur den Schalldruck. Unter den gleichen Vernachlassigungen wie oben geht ausGleichung (3.3) noch die Schallschnelle v aus dem Schalldruck p hervor:
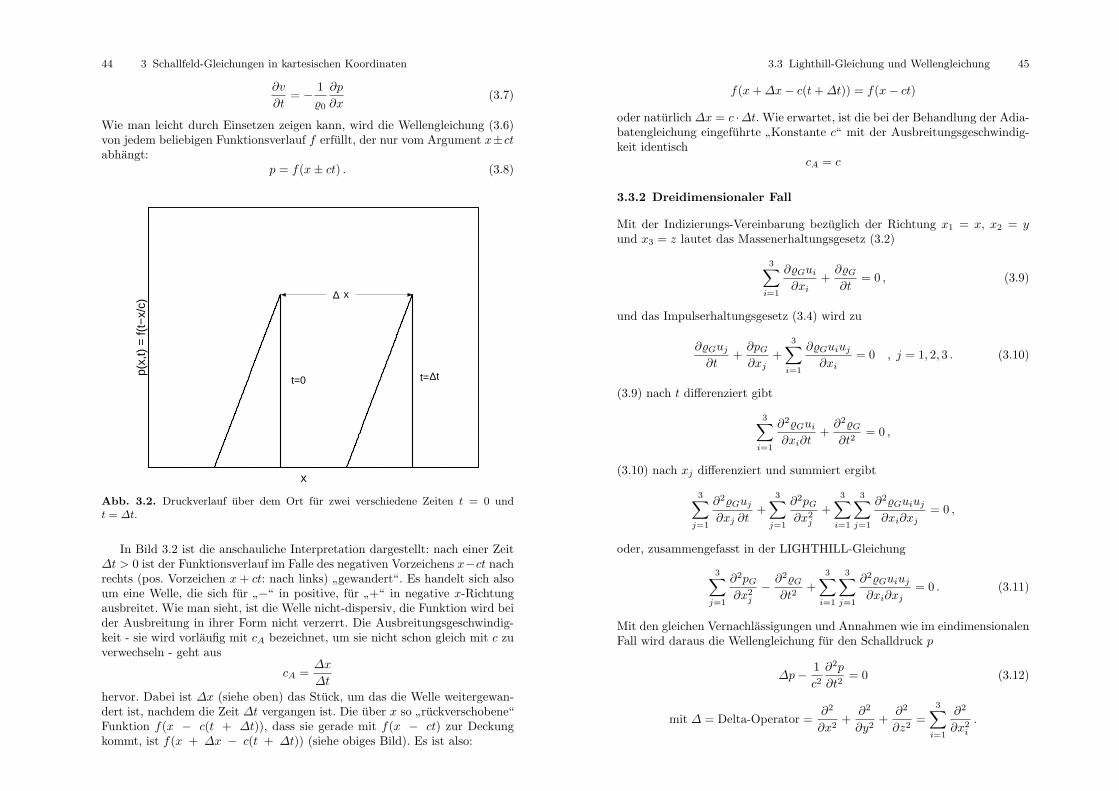
44 3 Schallfeld-Gleichungen in kartesischen Koordinaten
∂v
∂t= − 1
%0
∂p
∂x(3.7)
Wie man leicht durch Einsetzen zeigen kann, wird die Wellengleichung (3.6)von jedem beliebigen Funktionsverlauf f erfullt, der nur vom Argument x±ctabhangt:
p = f(x± ct) . (3.8)
x
p(x,
t) =
f(t−
x/c)
t=0 ∆ tt=
∆ x
Abb. 3.2. Druckverlauf uber dem Ort fur zwei verschiedene Zeiten t = 0 undt = ∆t.
In Bild 3.2 ist die anschauliche Interpretation dargestellt: nach einer Zeit∆t > 0 ist der Funktionsverlauf im Falle des negativen Vorzeichens x−ct nachrechts (pos. Vorzeichen x+ ct: nach links) ”gewandert“. Es handelt sich alsoum eine Welle, die sich fur ”−“ in positive, fur ”+“ in negative x-Richtungausbreitet. Wie man sieht, ist die Welle nicht-dispersiv, die Funktion wird beider Ausbreitung in ihrer Form nicht verzerrt. Die Ausbreitungsgeschwindig-keit - sie wird vorlaufig mit cA bezeichnet, um sie nicht schon gleich mit c zuverwechseln - geht aus
cA =∆x
∆t
hervor. Dabei ist ∆x (siehe oben) das Stuck, um das die Welle weitergewan-dert ist, nachdem die Zeit ∆t vergangen ist. Die uber x so ”ruckverschobene“Funktion f(x − c(t + ∆t)), dass sie gerade mit f(x − ct) zur Deckungkommt, ist f(x + ∆x − c(t + ∆t)) (siehe obiges Bild). Es ist also:
3.3 Lighthill-Gleichung und Wellengleichung 45
f(x+∆x− c(t+∆t)) = f(x− ct)
oder naturlich ∆x = c ·∆t. Wie erwartet, ist die bei der Behandlung der Adia-batengleichung eingefuhrte ”Konstante c“ mit der Ausbreitungsgeschwindig-keit identisch
cA = c
3.3.2 Dreidimensionaler Fall
Mit der Indizierungs-Vereinbarung bezuglich der Richtung x1 = x, x2 = yund x3 = z lautet das Massenerhaltungsgesetz (3.2)
3∑i=1
∂%Gui∂xi
+∂%G∂t
= 0 , (3.9)
und das Impulserhaltungsgesetz (3.4) wird zu
∂%Guj∂t
+∂pG∂xj
+3∑i=1
∂%Guiuj∂xi
= 0 , j = 1, 2, 3 . (3.10)
(3.9) nach t differenziert gibt
3∑i=1
∂2%Gui∂xi∂t
+∂2%G∂t2
= 0 ,
(3.10) nach xj differenziert und summiert ergibt
3∑j=1
∂2%Guj∂xj ∂t
+3∑j=1
∂2pG∂x2
j
+3∑i=1
3∑j=1
∂2%Guiuj∂xi∂xj
= 0 ,
oder, zusammengefasst in der LIGHTHILL-Gleichung
3∑j=1
∂2pG∂x2
j
− ∂2%G∂t2
+3∑i=1
3∑j=1
∂2%Guiuj∂xi∂xj
= 0 . (3.11)
Mit den gleichen Vernachlassigungen und Annahmen wie im eindimensionalenFall wird daraus die Wellengleichung fur den Schalldruck p
∆p− 1c2∂2p
∂t2= 0 (3.12)
mit ∆ = Delta-Operator =∂2
∂x2+
∂2
∂y2+
∂2
∂z2=
3∑i=1
∂2
∂x2i
.

46 3 Schallfeld-Gleichungen in kartesischen Koordinaten
Fur die Schnelle-Komponente gilt noch nach (3.10) unter den gleichen Ver-nachlassigungen:
∂vi∂t
= − 1%0
∂p
∂xi, i = 1, 2, 3 , (3.13)
oder, in Vektorschreibweise:
∂~v
∂t= − 1
%0grad p , (3.14)
wobei grad = ~ex∂/∂x + ~ey∂/∂y + ~ez∂/∂z und ~ex, ~ey, ~ez die orthogonalenEinheitsvektoren des kartesischen Systems sind. Die Kontinuitatsgleichung(3.9) geht uber in
∂vx∂x
+∂vy∂y
+∂vz∂z
= div ~v = − 1%0c2
∂p
∂t. (3.15)
3.4 Energie und Leistung in Schallfeldern
Da bei der Schallausbreitung in Gasen naturgemaß sowohl Kompressionen alsauch Bewegungen der Gasteilchen vorkommen, besteht die in einem Volumen-element ∆V gespeicherte Energie aus potentiellem und kinetischem Anteil
E∆V =12
{1
%0c2p2 + %0~v ·~v
}·∆V , (3.16)
wobei ~v ·~v das Skalarprodukt ist. Hierin ist
w =12
{1
%0c2p2 + %0~v ·~v
}(3.17)
die raumliche Energiedichte, aus der sich die im Gesamtfeld gespeicherte Ener-gie durch
E =∫V
w dV (3.18)
(V = Gesamtvolumen des Feldes) ergibt. Nun fließt in einem Schallfeld be-kanntlich Energie von der Quelle durch den Raum hindurch. Um den Energie-Fluss zu beschreiben, benutzt man die Intensitat ~I. Sie ist definiert als (vek-torielle) Leistungsdichte derart, dass sich die durch eine Flache S hindurch-tretende Leistung P nach
P =∫S
In, dS (3.19)
berechnen lasst (Bild 3.3, n: Normalkomponente des Vektors, also senkrechtauf der Flache).
3.4 Energie und Leistung in Schallfeldern 47
Abb. 3.3. Die durch die Flache S hindurchtretende Leistung ist ortlich verteilt.Ihre Flachendichte wird als Intensitat bezeichnet.
Aus dieser Definition lasst sich der Zusammenhang zwischen Intensitatund Energiedichte leicht herleiten. Die zeitliche Anderung des Energie-Inhaltes∆w ·∆V im Volumenelement mit den Kantenlangen∆x,∆y und∆z muss sichaus der Differenz von Leistungs-Zufluss und Abfluss ergeben:
∆w ·∆V = ∆t ·∆y ·∆z · [Ix(x)− Ix(x+∆x)]+∆t ·∆x ·∆z · [Iy(y)− Iy(y +∆y)]+∆t ·∆x ·∆y · [Iz(z)− Iz(z +∆z)] ,
oder, nach Grenzubergang ∆t→ 0, ∆x→ 0, ∆y → 0, ∆z → 0
∂w
∂t= −
{∂Ix∂x
+∂Iy∂y
+∂Iz∂z
}, (3.20)
wofur man auch kurz∂w
∂t= −div I (3.21)
schreibt. Setzt man in (3.20) die Energiedichte (3.17) ein, so ist
∂Ix∂x
+∂Iy∂y
+∂Iz∂z
= −{
1%0c2
p∂p
∂t+ %0~v
∂~v
∂t
}.
Unter Benutzung der Impuls-Bilanz (3.13) und der Kontinuitatsgleichung(3.15) wird daraus
∂Ix∂x
+∂Iy∂y
+∂Iz∂z
= p
(∂vx∂x
+∂vy∂y
+∂vz∂z
)+(vx∂p
∂x+ vy
∂p
∂y+ vz
∂p
∂z
)=∂pvx∂x
+∂pvy∂y
+∂pvz∂z
.
(3.22)
48 3 Schallfeld-Gleichungen in kartesischen Koordinaten
Da (3.22) auch gelten muss, wenn nur eine Komponente vorkommt (vy =vz = 0 beispielsweise) und in diesem Fall der Leistungsfluss auch nur eineKomponente haben kann, gilt:
Ix = p vx
bzw.Iy = p vy
bzw.Iz = p vz
oder allgemeiner fur die Vektoren
~I = p ·~v . (3.23)
Die Intensitat ist also einfach gleich dem Produkt von Druck und Schnelle.Leistungsflusse durch Flachen lassen sich aus ihr durch Integration nach (3.19)bestimmen.
Fur reine Tone
p = Re{p ejωt
}=
12(p ejωt + p∗e−jωt
)ist
~I =14{p ejωt + p∗e−jωt
}{~v ejωt + ~v∗e−jωt
}=
12
Re{p~v∗
}+
12
Re{p~v ej2ωt
}.
Der erste, zeitlich konstante Anteil heißt Wirk-Intensitat, die zugehorige,durch Flachenintegration ermittelte Leistung wird Wirk-Leistung genannt.Uberlagert ist ein mit der doppelten Frequenz hin und her flutender Wechse-lanteil, der Blind-Intensitat (-Leistung) genannt wird; diese ist im zeitlichenMittel gleich Null. Wie bei elektrischen Verbrauchern beschreibt man akusti-sche Quellen oft durch die Angabe der von ihnen bereitgestellten akustischenWirk-Leistung. Blind-Großen spielen in der Akustik keine Rolle.
4
Schallabstrahlung von ebenen Flachen
In diesem Kapitel wird das Schallfeld betrachtet, das von einer gegebenenschwingenden Flache in einer Ebene (z = 0) hervorgerufen wird. Es wirdalso angenommen, dass die anregende Schallschnelle in der Ebene bekanntist. Anschaulich kann man sich einen (oder mehrere) Lautsprecher in einer(großen) Schallwand eingebaut vorstellen, es kann sich aber auch um Platten(oder in einer Schallwand eingebaute Plattenstucke) handeln, die durch Kraftezu Biegeschwingungen angeregt werden und dadurch Schall abstrahlen.
Methodisch wird dabei genauso vorgegangen wie bei der Betrachtung der(zeitlichen) Fourier-Transformation. Betrachtet wird zunachst eine spezielleSchnelle in der Ebene, die selbst die Form einer Welle besitzt, und das da-von hervorgebrachte Schallfeld. Es wird dann leicht sein, wiederum die Linea-ritat auszunutzen, mehrere (anregende) Wellenlangen und ihre Wirkungen aufdas Schallfeld zu superponieren. Im Grenzfall fuhrt das zur ortlichen Fourier-Transformation:
F (k) =
∞∫−∞
f(x)e−jkxdx (4.1a)
f(x) =1
2π
∞∫−∞
F (k)ejkxdk , (4.1b)
bei der gegenuber der zeitlichen Fourier-Transformation nur die Variablet (Zeit) durch die Variable x (Ort) und die Variable ω (Frequenz) durch dieVariable k (Wellenzahl) ersetzt worden ist. Der Unterschied besteht lediglichdarin, dass nun keine ”Orts-Kausalitat“ mehr verlangt werden kann. Ebensokonnen die Original-Funktionen f(x) komplex sein: sie reprasentieren kom-plexe Amplituden von Zeitverlaufen oder zeitliche Fourier-Transformierte. Umdie bei Ebenen vorhandenen beiden unabhangigen Richtungen zu berucksich-tigen, muss man im allgemeinen Fall auch zweifach transformieren:
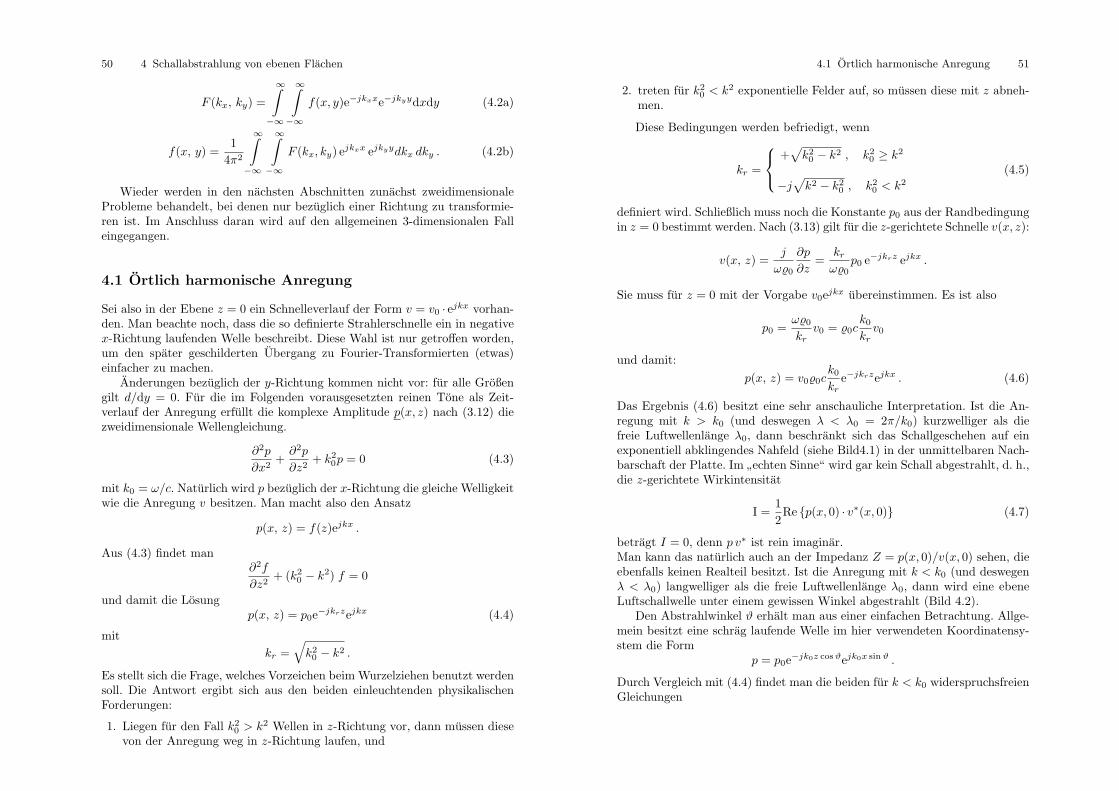
50 4 Schallabstrahlung von ebenen Flachen
F (kx, ky) =
∞∫−∞
∞∫−∞
f(x, y)e−jkxxe−jkyydxdy (4.2a)
f(x, y) =1
4π2
∞∫−∞
∞∫−∞
F (kx, ky) ejkxx ejkyydkx dky . (4.2b)
Wieder werden in den nachsten Abschnitten zunachst zweidimensionaleProbleme behandelt, bei denen nur bezuglich einer Richtung zu transformie-ren ist. Im Anschluss daran wird auf den allgemeinen 3-dimensionalen Falleingegangen.
4.1 Ortlich harmonische Anregung
Sei also in der Ebene z = 0 ein Schnelleverlauf der Form v = v0 · ejkx vorhan-den. Man beachte noch, dass die so definierte Strahlerschnelle ein in negativex-Richtung laufenden Welle beschreibt. Diese Wahl ist nur getroffen worden,um den spater geschilderten Ubergang zu Fourier-Transformierten (etwas)einfacher zu machen.
Anderungen bezuglich der y-Richtung kommen nicht vor: fur alle Großengilt d/dy = 0. Fur die im Folgenden vorausgesetzten reinen Tone als Zeit-verlauf der Anregung erfullt die komplexe Amplitude p(x, z) nach (3.12) diezweidimensionale Wellengleichung.
∂2p
∂x2+∂2p
∂z2+ k2
0p = 0 (4.3)
mit k0 = ω/c. Naturlich wird p bezuglich der x-Richtung die gleiche Welligkeitwie die Anregung v besitzen. Man macht also den Ansatz
p(x, z) = f(z)ejkx .
Aus (4.3) findet man∂2f
∂z2+ (k2
0 − k2) f = 0
und damit die Losungp(x, z) = p0e−jkrzejkx (4.4)
mitkr =
√k2
0 − k2 .
Es stellt sich die Frage, welches Vorzeichen beim Wurzelziehen benutzt werdensoll. Die Antwort ergibt sich aus den beiden einleuchtenden physikalischenForderungen:
1. Liegen fur den Fall k20 > k2 Wellen in z-Richtung vor, dann mussen diese
von der Anregung weg in z-Richtung laufen, und
4.1 Ortlich harmonische Anregung 51
2. treten fur k20 < k2 exponentielle Felder auf, so mussen diese mit z abneh-
men.
Diese Bedingungen werden befriedigt, wenn
kr =
+√k2
0 − k2 , k20 ≥ k2
−j√k2 − k2
0 , k20 < k2
(4.5)
definiert wird. Schließlich muss noch die Konstante p0 aus der Randbedingungin z = 0 bestimmt werden. Nach (3.13) gilt fur die z-gerichtete Schnelle v(x, z):
v(x, z) =j
ω%0
∂p
∂z=
krω%0
p0 e−jkrz ejkx .
Sie muss fur z = 0 mit der Vorgabe v0ejkx ubereinstimmen. Es ist also
p0 =ω%0
krv0 = %0c
k0
krv0
und damit:p(x, z) = v0%0c
k0
kre−jkrzejkx . (4.6)
Das Ergebnis (4.6) besitzt eine sehr anschauliche Interpretation. Ist die An-regung mit k > k0 (und deswegen λ < λ0 = 2π/k0) kurzwelliger als diefreie Luftwellenlange λ0, dann beschrankt sich das Schallgeschehen auf einexponentiell abklingendes Nahfeld (siehe Bild4.1) in der unmittelbaren Nach-barschaft der Platte. Im ”echten Sinne“ wird gar kein Schall abgestrahlt, d. h.,die z-gerichtete Wirkintensitat
I =12
Re {p(x, 0) · v∗(x, 0)} (4.7)
betragt I = 0, denn p v∗ ist rein imaginar.Man kann das naturlich auch an der Impedanz Z = p(x, 0)/v(x, 0) sehen, dieebenfalls keinen Realteil besitzt. Ist die Anregung mit k < k0 (und deswegenλ < λ0) langwelliger als die freie Luftwellenlange λ0, dann wird eine ebeneLuftschallwelle unter einem gewissen Winkel abgestrahlt (Bild 4.2).
Den Abstrahlwinkel ϑ erhalt man aus einer einfachen Betrachtung. Allge-mein besitzt eine schrag laufende Welle im hier verwendeten Koordinatensy-stem die Form
p = p0e−jk0z cosϑejk0x sinϑ .
Durch Vergleich mit (4.4) findet man die beiden fur k < k0 widerspruchsfreienGleichungen

52 4 Schallabstrahlung von ebenen Flachen
Abb. 4.1. Schallfeld vor einem kurzwelligen Strahler in Form einer nach oben lau-fenden Welle mit der Schallschnelle vz = v0e−j2πy/λ fur λ = 0, 9λ0. Die durchgezo-gene Linie links zeigt die Strahler-Schwingung selbst.
Abb. 4.2. Schallfeld vor einem langwelligen Strahler in Form einer nach oben lau-fenden Welle mit der Schallschnelle vz = v0e−j2πy/λ fur λ = 2λ0. Die durchgezogeneLinie links zeigt die Strahler-Schwingung selbst.
kr = +√k2
0 − k2 = k0 cosϑsp
k = −k0 · sinϑsp ,
4.2 Allgemeine Form der Anregung 53
woraussinϑsp = k/k0 = −λ0/λ (4.8)
folgt.Wie man auch Bild 4.2 entnehmen kann, erfolgt die Abstrahlung so, dass
im schragen Schnitt, den die strahlende Ebene durch das Wellengebirge desLuftschalls bildet, die (großere) Strahlerwellenlange λ vorliegt. Diesen phy-sikalischen Effekt nennt man anschaulich ”Spuranpassung“, der sich einstel-lende Abstrahlwinkel ϑsp heißt ”Spuranpassungswinkel“. Im Falle der ”echtenAbstrahlung“ betragt die z-gerichtete Wirkintensitat (siehe (4.7)):
I =12v2
0%0ck0
kr=
12v2
0
%0c
cosϑ. (4.9)
4.2 Allgemeine Form der Anregung
Bei einem allgemeinen Funktionsverlauf v(x) zerlegt man diesen in seine infi-nitesimalen Wellenkomponenten V (k)
V (k) =
∞∫−∞
v(x) e−jkxdx .
Da nun die Luftschall-Reaktion auf jede Komponente V (k) aus dem vorigenAbschnitt bekannt ist, namlich
P (k) = V (k)%0ck0
kre−jkrz
nach (4.4), folgt durch Rucktransformation
p(x, z) =%0c
2π
∞∫−∞
V (k)k0
kre−jkrzejkxdk (4.10)
(man beachte, dass kr von k abhangt), womit das Problem gelost ist. Daeinzig vom Superpositionsprinzip fur Teilwellen Gebrauch gemacht wurde, istes wohl nicht mehr weiter verwunderlich, dass die Fourier-Transformierte P (k)
P (k) = V (k) · %0ck0
kre−jkrz
das Produkt aus Anrege-Wellenzahlspektrum und einem ”system-typischen“Spektrum darstellt. Man kann also den Faltungssatz ausnutzen, wenn dieRucktransformierte
h(x, z) = F−1
{H(k, z) = %0c
k0
kre−jkrz
}
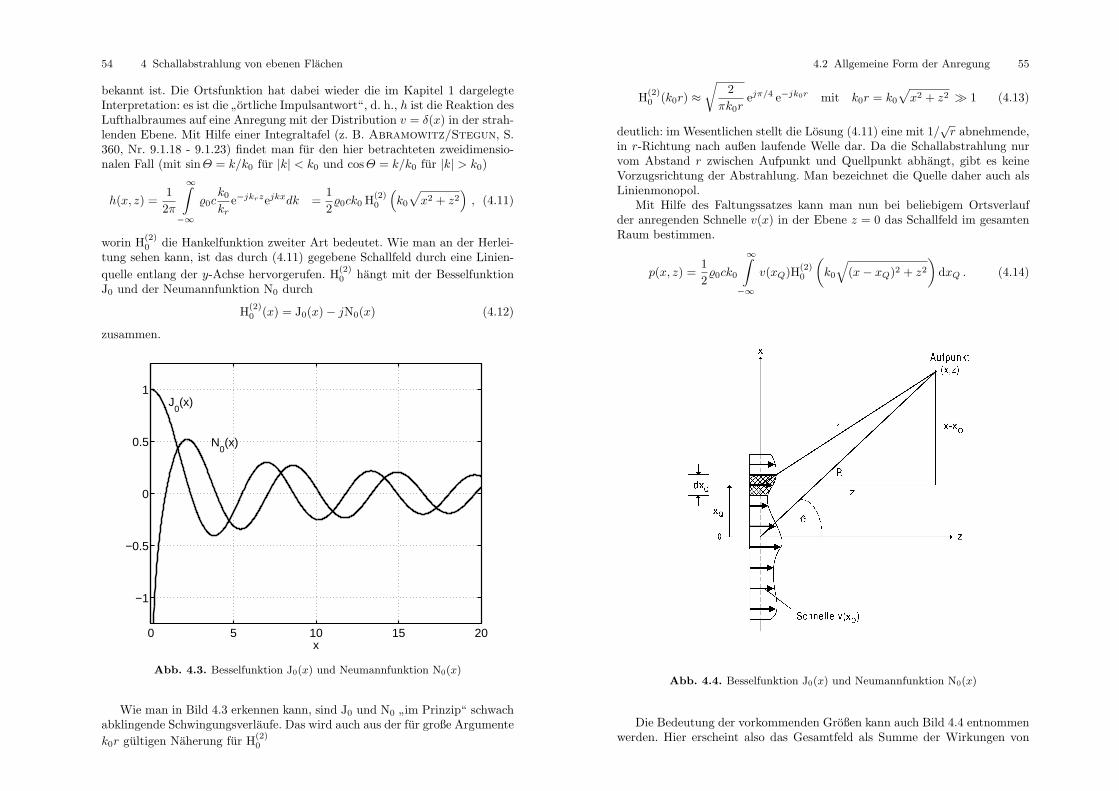
54 4 Schallabstrahlung von ebenen Flachen
bekannt ist. Die Ortsfunktion hat dabei wieder die im Kapitel 1 dargelegteInterpretation: es ist die ”ortliche Impulsantwort“, d. h., h ist die Reaktion desLufthalbraumes auf eine Anregung mit der Distribution v = δ(x) in der strah-lenden Ebene. Mit Hilfe einer Integraltafel (z. B. Abramowitz/Stegun, S.360, Nr. 9.1.18 - 9.1.23) findet man fur den hier betrachteten zweidimensio-nalen Fall (mit sinΘ = k/k0 fur |k| < k0 und cosΘ = k/k0 fur |k| > k0)
h(x, z) =1
2π
∞∫−∞
%0ck0
kre−jkrzejkxdk =
12%0ck0 H(2)
0
(k0
√x2 + z2
), (4.11)
worin H(2)0 die Hankelfunktion zweiter Art bedeutet. Wie man an der Herlei-
tung sehen kann, ist das durch (4.11) gegebene Schallfeld durch eine Linien-quelle entlang der y-Achse hervorgerufen. H(2)
0 hangt mit der BesselfunktionJ0 und der Neumannfunktion N0 durch
H(2)0 (x) = J0(x)− jN0(x) (4.12)
zusammen.
0 5 10 15 20
−1
−0.5
0
0.5
1
x
J0(x)
N0(x)
Abb. 4.3. Besselfunktion J0(x) und Neumannfunktion N0(x)
Wie man in Bild 4.3 erkennen kann, sind J0 und N0 ”im Prinzip“ schwachabklingende Schwingungsverlaufe. Das wird auch aus der fur große Argumentek0r gultigen Naherung fur H(2)
0
4.2 Allgemeine Form der Anregung 55
H(2)0 (k0r) ≈
√2
πk0rejπ/4 e−jk0r mit k0r = k0
√x2 + z2 � 1 (4.13)
deutlich: im Wesentlichen stellt die Losung (4.11) eine mit 1/√r abnehmende,
in r-Richtung nach außen laufende Welle dar. Da die Schallabstrahlung nurvom Abstand r zwischen Aufpunkt und Quellpunkt abhangt, gibt es keineVorzugsrichtung der Abstrahlung. Man bezeichnet die Quelle daher auch alsLinienmonopol.
Mit Hilfe des Faltungssatzes kann man nun bei beliebigem Ortsverlaufder anregenden Schnelle v(x) in der Ebene z = 0 das Schallfeld im gesamtenRaum bestimmen.
p(x, z) =12%0ck0
∞∫−∞
v(xQ)H(2)0
(k0
√(x− xQ)2 + z2
)dxQ . (4.14)
Abb. 4.4. Besselfunktion J0(x) und Neumannfunktion N0(x)
Die Bedeutung der vorkommenden Großen kann auch Bild 4.4 entnommenwerden. Hier erscheint also das Gesamtfeld als Summe der Wirkungen von
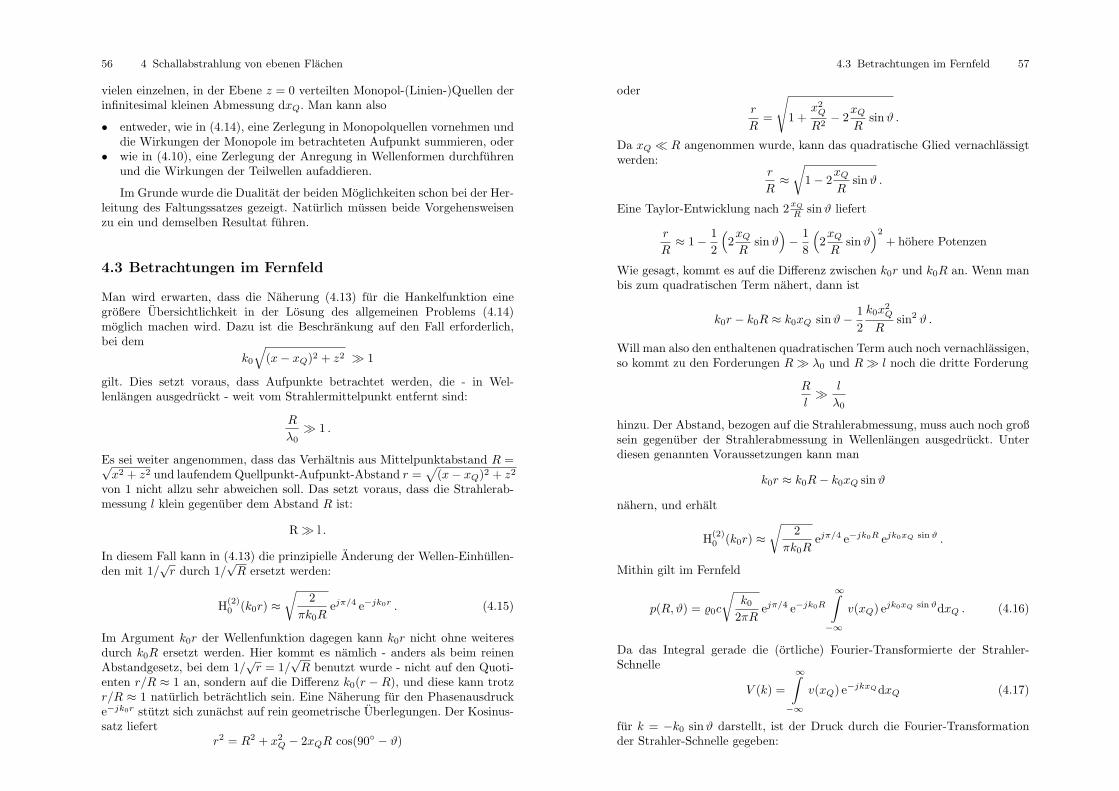
56 4 Schallabstrahlung von ebenen Flachen
vielen einzelnen, in der Ebene z = 0 verteilten Monopol-(Linien-)Quellen derinfinitesimal kleinen Abmessung dxQ. Man kann also
• entweder, wie in (4.14), eine Zerlegung in Monopolquellen vornehmen unddie Wirkungen der Monopole im betrachteten Aufpunkt summieren, oder
• wie in (4.10), eine Zerlegung der Anregung in Wellenformen durchfuhrenund die Wirkungen der Teilwellen aufaddieren.
Im Grunde wurde die Dualitat der beiden Moglichkeiten schon bei der Her-leitung des Faltungssatzes gezeigt. Naturlich mussen beide Vorgehensweisenzu ein und demselben Resultat fuhren.
4.3 Betrachtungen im Fernfeld
Man wird erwarten, dass die Naherung (4.13) fur die Hankelfunktion einegroßere Ubersichtlichkeit in der Losung des allgemeinen Problems (4.14)moglich machen wird. Dazu ist die Beschrankung auf den Fall erforderlich,bei dem
k0
√(x− xQ)2 + z2 � 1
gilt. Dies setzt voraus, dass Aufpunkte betrachtet werden, die - in Wel-lenlangen ausgedruckt - weit vom Strahlermittelpunkt entfernt sind:
R
λ0� 1 .
Es sei weiter angenommen, dass das Verhaltnis aus Mittelpunktabstand R =√x2 + z2 und laufendem Quellpunkt-Aufpunkt-Abstand r =
√(x− xQ)2 + z2
von 1 nicht allzu sehr abweichen soll. Das setzt voraus, dass die Strahlerab-messung l klein gegenuber dem Abstand R ist:
R� l .
In diesem Fall kann in (4.13) die prinzipielle Anderung der Wellen-Einhullen-den mit 1/
√r durch 1/
√R ersetzt werden:
H(2)0 (k0r) ≈
√2
πk0Rejπ/4 e−jk0r . (4.15)
Im Argument k0r der Wellenfunktion dagegen kann k0r nicht ohne weiteresdurch k0R ersetzt werden. Hier kommt es namlich - anders als beim reinenAbstandgesetz, bei dem 1/
√r = 1/
√R benutzt wurde - nicht auf den Quoti-
enten r/R ≈ 1 an, sondern auf die Differenz k0(r − R), und diese kann trotzr/R ≈ 1 naturlich betrachtlich sein. Eine Naherung fur den Phasenausdrucke−jk0r stutzt sich zunachst auf rein geometrische Uberlegungen. Der Kosinus-satz liefert
r2 = R2 + x2Q − 2xQR cos(90◦ − ϑ)
4.3 Betrachtungen im Fernfeld 57
oderr
R=
√1 +
x2Q
R2− 2
xQR
sinϑ .
Da xQ � R angenommen wurde, kann das quadratische Glied vernachlassigtwerden:
r
R≈√
1− 2xQR
sinϑ .
Eine Taylor-Entwicklung nach 2xQR sinϑ liefert
r
R≈ 1− 1
2
(2xQR
sinϑ)− 1
8
(2xQR
sinϑ)2
+ hohere Potenzen
Wie gesagt, kommt es auf die Differenz zwischen k0r und k0R an. Wenn manbis zum quadratischen Term nahert, dann ist
k0r − k0R ≈ k0xQ sinϑ− 12k0x
2Q
Rsin2 ϑ .
Will man also den enthaltenen quadratischen Term auch noch vernachlassigen,so kommt zu den Forderungen R� λ0 und R� l noch die dritte Forderung
R
l� l
λ0
hinzu. Der Abstand, bezogen auf die Strahlerabmessung, muss auch noch großsein gegenuber der Strahlerabmessung in Wellenlangen ausgedruckt. Unterdiesen genannten Voraussetzungen kann man
k0r ≈ k0R− k0xQ sinϑ
nahern, und erhalt
H(2)0 (k0r) ≈
√2
πk0Rejπ/4 e−jk0R ejk0xQ sinϑ .
Mithin gilt im Fernfeld
p(R,ϑ) = %0c
√k0
2πRejπ/4 e−jk0R
∞∫−∞
v(xQ) ejk0xQ sinϑdxQ . (4.16)
Da das Integral gerade die (ortliche) Fourier-Transformierte der Strahler-Schnelle
V (k) =
∞∫−∞
v(xQ) e−jkxQdxQ (4.17)
fur k = −k0 sinϑ darstellt, ist der Druck durch die Fourier-Transformationder Strahler-Schnelle gegeben:
58 4 Schallabstrahlung von ebenen Flachen
p(R,ϑ) = %0c
√k0
2πRejπ/4 e−jk0RV (k = −k0 sinϑ) . (4.18)
Dieses Ergebnis ist nicht eben uberraschend. Bereits in Abschnitt 4.1 wurdefestgestellt, dass nur die Strahler-Wellen-Anteile mit k2
0 ≥ k2 zur Abstrah-lung ins Fernfeld beitragen. Aus diesem Grund konnen im Fernfeld auch nurdie Strahler-Anteile |k| ≤ k0 merklich sein: der Schalldruck uber dem Win-kel ergibt sich unmittelbar als ”Ausschnitt“ aus der fouriertransformiertenStrahler-Schnelle. Im genannten Wellenzahl-Intervall, das fur die Abstrah-lung quasi ”sichtbar“ ist, ist daruber hinaus jeder Strahler-Wellenlange ge-rade eine Abstrahlrichtung zugeordnet. Kein Wunder also, dass gerade dieFourier-Wellenzahl-Zerlegung unmittelbar die Richtcharakteristik beschreibt.
Wie man unter Benutzung der oben gemachten Voraussetzungen zeigenkann, ist die radial nach außen weisende Schnelle-Komponente vR im Fernfeld
vR(R,ϑ) =p(R,ϑ)%0c
. (4.19)
Fur alle Strahler liegt also im Fernfeld die Impedanz %0c vor. Fur die radialeIntensitat heißt das
IR =12
Re {p · v∗R} =%0ck0
4πR|V (k = −k0 sinϑ)|2 . (4.20)
Die uber dem Winkel ϑ aufgetragene Intensitat IR wird als Richtwirkungbezeichnet. Wie man sieht, kann sie aus der Messung des Schalldruckquadratesbestimmt werden. Schließlich erlaubt Gleichung (4.20) noch die Berechnungder (pro Langeneinheit der y-Richtung) abgestrahlten Leistung:
P ′ =
π/2∫−π/2
IR ·R dϑ
=%0ck0
4π
π/2∫−π/2
|V (k = −k0 sinϑ)|2 dϑ . (4.21)
Als Abstrahlgrad σ bezeichnet man das Leistungsverhaltnis
σ =P
P∞, (4.22)
wobei P∞ die (pro Langeneinheit y-Richtung) abgestrahlte Leistung eines imVergleich zur Wellenlange sehr langen, als Ganzes bewegten Strahlers (v(x) =const. fur − l
2 ≤ x ≤ l2 ) mit gleichem mittleren Schnelle-Quadrat
v2 =1l
l/2∫−l/2
|v(x)|2 dx (4.23)
4.3 Betrachtungen im Fernfeld 59
darstellt. Da vom sehr langen als Ganzes bewegten Strahler ebene Wellenausgesandt werden, ist
P∞ =12%0c v2 · l ,
und folglich gilt fur den Abstrahlgrad:
σ =1
2πk0
lv2
π/2∫−π/2
|V (k = −k0 sinϑ)|2 dϑ . (4.24)
Es sei darauf hingewiesen, dass die nach (4.21) im Strahler-Fernfeld berech-nete Leistung ”exakt“ ist und nicht etwa eine Naherung fur die wahre Leistungangibt. Weil die Leistung durch eine beliebige, um den Strahler gelegte (ge-dachte) Hullflache stets die gleiche sein muss, fuhrt die Betrachtung r → ∞zum ”korrekten“ Resultat. An den Gl. (4.18) bis (4.21) lasst sich auch nochder oft interessierende Sonderfall tiefer Frequenzen ablesen. Ist namlich dieStrahler-Abmessung l viel kleiner als die akustische Wellenlange λ0, dann kannman die Fourier-Transformierte V (k) im hier nur interessierenden Intervall|k| < k0 durch den Nettovolumenfluss Q′ (pro Langeneinheit der y-Richtung)
V (k) ∼=∞∫−∞
v(x) dx = Q′
ersetzen. Strahler ohne Netto-Volumenfluss Q′ = 0 strahlen also sehr vielschlechter Schall ab als solche mit Q′ 6= 0. Diese Tatsache spielt vor allem beiden wellenformigen Strahlern (siehe Abschnitt 4.4.2) eine Rolle.
4.3.1 Fernfeldbedingungen
Die Betrachtungen im vorigen Abschnitt im Fernfeld eines Strahlers standenunter den drei Bedingungen
R
λ0� 1 , (4.25)
R
l� 1 (4.26)
undR
l� l
λ0. (4.27)
Fur theoretische Berechnungen konnen naturlich immer Abstande R so ange-nommen werden, dass diese drei Fernfeldbedingungen auch eingehalten wer-den. Das gilt nicht fur einen festen Messaufbau, der zur Vereinfachung ”unterFernfeldbedingungen“ benutzt werden soll. Er wurde es z. B. erlauben, auseinfachen Druckmessungen auf die abgestrahlte Leistung zu schließen. Fur einfestes R wird die Bedingung (4.25) bei entsprechend tiefen Tonen mit großen
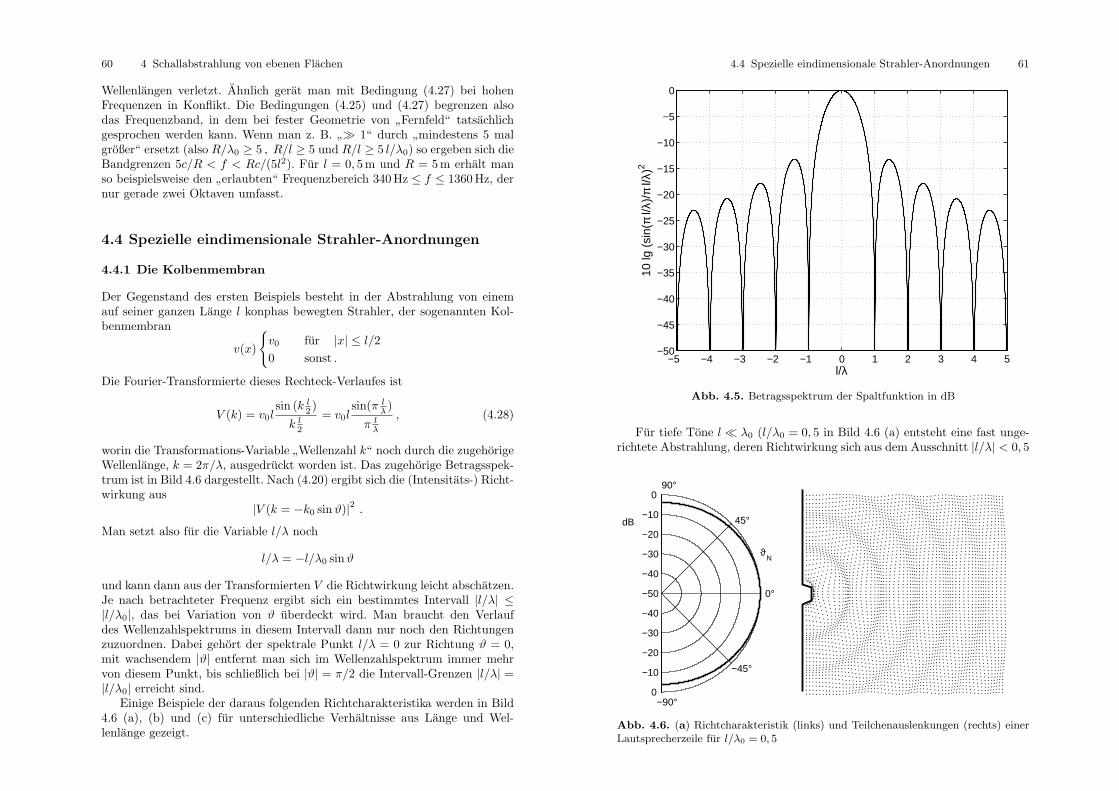
60 4 Schallabstrahlung von ebenen Flachen
Wellenlangen verletzt. Ahnlich gerat man mit Bedingung (4.27) bei hohenFrequenzen in Konflikt. Die Bedingungen (4.25) und (4.27) begrenzen alsodas Frequenzband, in dem bei fester Geometrie von ”Fernfeld“ tatsachlichgesprochen werden kann. Wenn man z. B. ”� 1“ durch ”mindestens 5 malgroßer“ ersetzt (also R/λ0 ≥ 5 , R/l ≥ 5 und R/l ≥ 5 l/λ0) so ergeben sich dieBandgrenzen 5c/R < f < Rc/(5l2). Fur l = 0, 5 m und R = 5 m erhalt manso beispielsweise den ”erlaubten“ Frequenzbereich 340 Hz ≤ f ≤ 1360 Hz, dernur gerade zwei Oktaven umfasst.
4.4 Spezielle eindimensionale Strahler-Anordnungen
4.4.1 Die Kolbenmembran
Der Gegenstand des ersten Beispiels besteht in der Abstrahlung von einemauf seiner ganzen Lange l konphas bewegten Strahler, der sogenannten Kol-benmembran
v(x)
{v0 fur |x| ≤ l/20 sonst .
Die Fourier-Transformierte dieses Rechteck-Verlaufes ist
V (k) = v0lsin (k l2 )k l2
= v0lsin(π l
λ )π lλ
, (4.28)
worin die Transformations-Variable ”Wellenzahl k“ noch durch die zugehorigeWellenlange, k = 2π/λ, ausgedruckt worden ist. Das zugehorige Betragsspek-trum ist in Bild 4.6 dargestellt. Nach (4.20) ergibt sich die (Intensitats-) Richt-wirkung aus
|V (k = −k0 sinϑ)|2 .Man setzt also fur die Variable l/λ noch
l/λ = −l/λ0 sinϑ
und kann dann aus der Transformierten V die Richtwirkung leicht abschatzen.Je nach betrachteter Frequenz ergibt sich ein bestimmtes Intervall |l/λ| ≤|l/λ0|, das bei Variation von ϑ uberdeckt wird. Man braucht den Verlaufdes Wellenzahlspektrums in diesem Intervall dann nur noch den Richtungenzuzuordnen. Dabei gehort der spektrale Punkt l/λ = 0 zur Richtung ϑ = 0,mit wachsendem |ϑ| entfernt man sich im Wellenzahlspektrum immer mehrvon diesem Punkt, bis schließlich bei |ϑ| = π/2 die Intervall-Grenzen |l/λ| =|l/λ0| erreicht sind.
Einige Beispiele der daraus folgenden Richtcharakteristika werden in Bild4.6 (a), (b) und (c) fur unterschiedliche Verhaltnisse aus Lange und Wel-lenlange gezeigt.
4.4 Spezielle eindimensionale Strahler-Anordnungen 61
−5 −4 −3 −2 −1 0 1 2 3 4 5−50
−45
−40
−35
−30
−25
−20
−15
−10
−5
0
l/λ
10 lg
(si
n(π
l/λ)/
π l/λ
)2
Abb. 4.5. Betragsspektrum der Spaltfunktion in dB
Fur tiefe Tone l � λ0 (l/λ0 = 0, 5 in Bild 4.6 (a) entsteht eine fast unge-richtete Abstrahlung, deren Richtwirkung sich aus dem Ausschnitt |l/λ| < 0, 5
0
0
−10
−10
−20
−20
−30
−30
−40
−40
−50 0°
45°
−45°
90°
−90°
dB
ϑN
Abb. 4.6. (a) Richtcharakteristik (links) und Teilchenauslenkungen (rechts) einerLautsprecherzeile fur l/λ0 = 0, 5
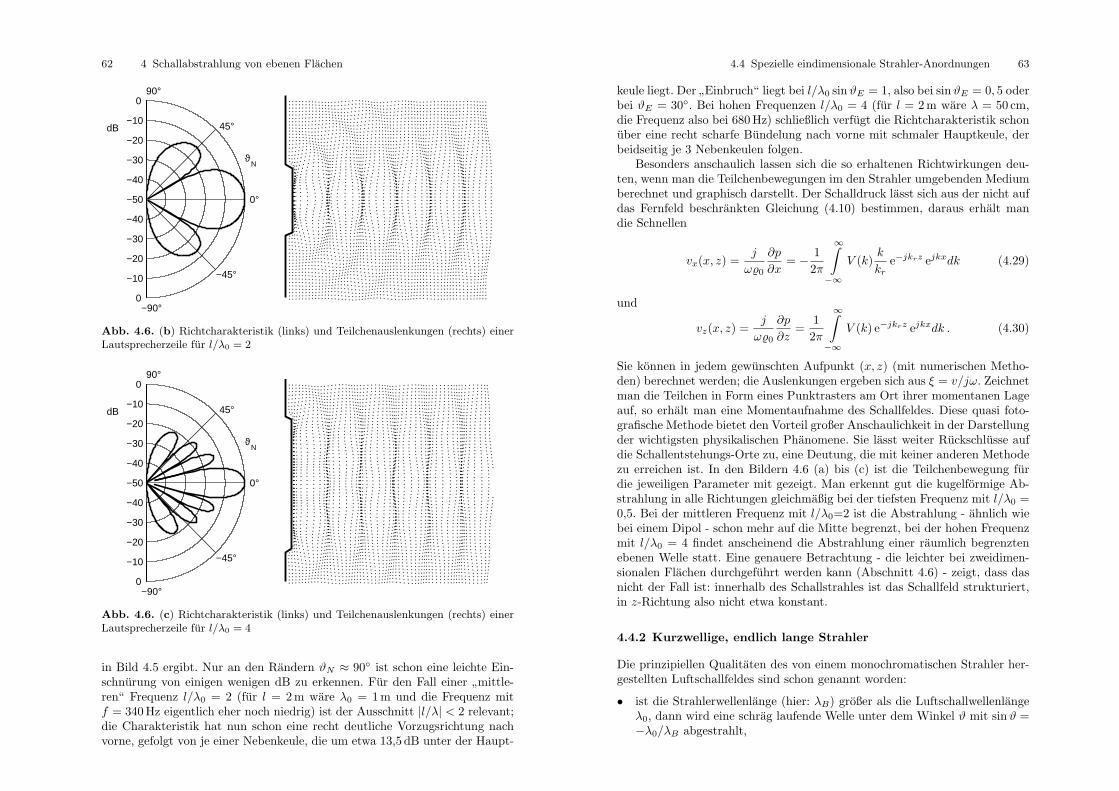
62 4 Schallabstrahlung von ebenen Flachen
0
0
−10
−10
−20
−20
−30
−30
−40
−40
−50 0°
45°
−45°
90°
−90°
dB
ϑN
Abb. 4.6. (b) Richtcharakteristik (links) und Teilchenauslenkungen (rechts) einerLautsprecherzeile fur l/λ0 = 2
0
0
−10
−10
−20
−20
−30
−30
−40
−40
−50 0°
45°
−45°
90°
−90°
dB
ϑN
Abb. 4.6. (c) Richtcharakteristik (links) und Teilchenauslenkungen (rechts) einerLautsprecherzeile fur l/λ0 = 4
in Bild 4.5 ergibt. Nur an den Randern ϑN ≈ 90◦ ist schon eine leichte Ein-schnurung von einigen wenigen dB zu erkennen. Fur den Fall einer ”mittle-ren“ Frequenz l/λ0 = 2 (fur l = 2 m ware λ0 = 1 m und die Frequenz mitf = 340 Hz eigentlich eher noch niedrig) ist der Ausschnitt |l/λ| < 2 relevant;die Charakteristik hat nun schon eine recht deutliche Vorzugsrichtung nachvorne, gefolgt von je einer Nebenkeule, die um etwa 13,5 dB unter der Haupt-
4.4 Spezielle eindimensionale Strahler-Anordnungen 63
keule liegt. Der ”Einbruch“ liegt bei l/λ0 sinϑE = 1, also bei sinϑE = 0, 5 oderbei ϑE = 30◦. Bei hohen Frequenzen l/λ0 = 4 (fur l = 2 m ware λ = 50 cm,die Frequenz also bei 680 Hz) schließlich verfugt die Richtcharakteristik schonuber eine recht scharfe Bundelung nach vorne mit schmaler Hauptkeule, derbeidseitig je 3 Nebenkeulen folgen.
Besonders anschaulich lassen sich die so erhaltenen Richtwirkungen deu-ten, wenn man die Teilchenbewegungen im den Strahler umgebenden Mediumberechnet und graphisch darstellt. Der Schalldruck lasst sich aus der nicht aufdas Fernfeld beschrankten Gleichung (4.10) bestimmen, daraus erhalt mandie Schnellen
vx(x, z) =j
ω%0
∂p
∂x= − 1
2π
∞∫−∞
V (k)k
kre−jkrz ejkxdk (4.29)
und
vz(x, z) =j
ω%0
∂p
∂z=
12π
∞∫−∞
V (k) e−jkrz ejkxdk . (4.30)
Sie konnen in jedem gewunschten Aufpunkt (x, z) (mit numerischen Metho-den) berechnet werden; die Auslenkungen ergeben sich aus ξ = v/jω. Zeichnetman die Teilchen in Form eines Punktrasters am Ort ihrer momentanen Lageauf, so erhalt man eine Momentaufnahme des Schallfeldes. Diese quasi foto-grafische Methode bietet den Vorteil großer Anschaulichkeit in der Darstellungder wichtigsten physikalischen Phanomene. Sie lasst weiter Ruckschlusse aufdie Schallentstehungs-Orte zu, eine Deutung, die mit keiner anderen Methodezu erreichen ist. In den Bildern 4.6 (a) bis (c) ist die Teilchenbewegung furdie jeweiligen Parameter mit gezeigt. Man erkennt gut die kugelformige Ab-strahlung in alle Richtungen gleichmaßig bei der tiefsten Frequenz mit l/λ0 =0,5. Bei der mittleren Frequenz mit l/λ0=2 ist die Abstrahlung - ahnlich wiebei einem Dipol - schon mehr auf die Mitte begrenzt, bei der hohen Frequenzmit l/λ0 = 4 findet anscheinend die Abstrahlung einer raumlich begrenztenebenen Welle statt. Eine genauere Betrachtung - die leichter bei zweidimen-sionalen Flachen durchgefuhrt werden kann (Abschnitt 4.6) - zeigt, dass dasnicht der Fall ist: innerhalb des Schallstrahles ist das Schallfeld strukturiert,in z-Richtung also nicht etwa konstant.
4.4.2 Kurzwellige, endlich lange Strahler
Die prinzipiellen Qualitaten des von einem monochromatischen Strahler her-gestellten Luftschallfeldes sind schon genannt worden:
• ist die Strahlerwellenlange (hier: λB) großer als die Luftschallwellenlangeλ0, dann wird eine schrag laufende Welle unter dem Winkel ϑ mit sinϑ =−λ0/λB abgestrahlt,
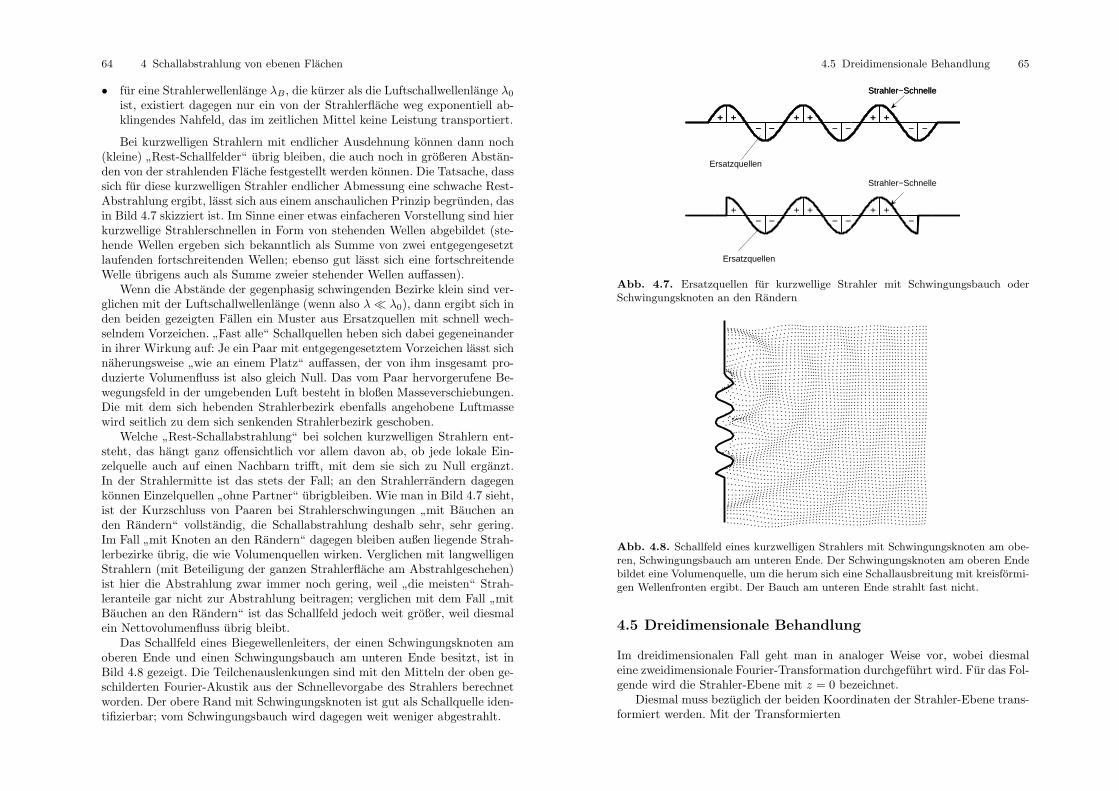
64 4 Schallabstrahlung von ebenen Flachen
• fur eine Strahlerwellenlange λB , die kurzer als die Luftschallwellenlange λ0
ist, existiert dagegen nur ein von der Strahlerflache weg exponentiell ab-klingendes Nahfeld, das im zeitlichen Mittel keine Leistung transportiert.
Bei kurzwelligen Strahlern mit endlicher Ausdehnung konnen dann noch(kleine) ”Rest-Schallfelder“ ubrig bleiben, die auch noch in großeren Abstan-den von der strahlenden Flache festgestellt werden konnen. Die Tatsache, dasssich fur diese kurzwelligen Strahler endlicher Abmessung eine schwache Rest-Abstrahlung ergibt, lasst sich aus einem anschaulichen Prinzip begrunden, dasin Bild 4.7 skizziert ist. Im Sinne einer etwas einfacheren Vorstellung sind hierkurzwellige Strahlerschnellen in Form von stehenden Wellen abgebildet (ste-hende Wellen ergeben sich bekanntlich als Summe von zwei entgegengesetztlaufenden fortschreitenden Wellen; ebenso gut lasst sich eine fortschreitendeWelle ubrigens auch als Summe zweier stehender Wellen auffassen).
Wenn die Abstande der gegenphasig schwingenden Bezirke klein sind ver-glichen mit der Luftschallwellenlange (wenn also λ� λ0), dann ergibt sich inden beiden gezeigten Fallen ein Muster aus Ersatzquellen mit schnell wech-selndem Vorzeichen. ”Fast alle“ Schallquellen heben sich dabei gegeneinanderin ihrer Wirkung auf: Je ein Paar mit entgegengesetztem Vorzeichen lasst sichnaherungsweise ”wie an einem Platz“ auffassen, der von ihm insgesamt pro-duzierte Volumenfluss ist also gleich Null. Das vom Paar hervorgerufene Be-wegungsfeld in der umgebenden Luft besteht in bloßen Masseverschiebungen.Die mit dem sich hebenden Strahlerbezirk ebenfalls angehobene Luftmassewird seitlich zu dem sich senkenden Strahlerbezirk geschoben.
Welche ”Rest-Schallabstrahlung“ bei solchen kurzwelligen Strahlern ent-steht, das hangt ganz offensichtlich vor allem davon ab, ob jede lokale Ein-zelquelle auch auf einen Nachbarn trifft, mit dem sie sich zu Null erganzt.In der Strahlermitte ist das stets der Fall; an den Strahlerrandern dagegenkonnen Einzelquellen ”ohne Partner“ ubrigbleiben. Wie man in Bild 4.7 sieht,ist der Kurzschluss von Paaren bei Strahlerschwingungen ”mit Bauchen anden Randern“ vollstandig, die Schallabstrahlung deshalb sehr, sehr gering.Im Fall ”mit Knoten an den Randern“ dagegen bleiben außen liegende Strah-lerbezirke ubrig, die wie Volumenquellen wirken. Verglichen mit langwelligenStrahlern (mit Beteiligung der ganzen Strahlerflache am Abstrahlgeschehen)ist hier die Abstrahlung zwar immer noch gering, weil ”die meisten“ Strah-leranteile gar nicht zur Abstrahlung beitragen; verglichen mit dem Fall ”mitBauchen an den Randern“ ist das Schallfeld jedoch weit großer, weil diesmalein Nettovolumenfluss ubrig bleibt.
Das Schallfeld eines Biegewellenleiters, der einen Schwingungsknoten amoberen Ende und einen Schwingungsbauch am unteren Ende besitzt, ist inBild 4.8 gezeigt. Die Teilchenauslenkungen sind mit den Mitteln der oben ge-schilderten Fourier-Akustik aus der Schnellevorgabe des Strahlers berechnetworden. Der obere Rand mit Schwingungsknoten ist gut als Schallquelle iden-tifizierbar; vom Schwingungsbauch wird dagegen weit weniger abgestrahlt.
4.5 Dreidimensionale Behandlung 65
Strahler−Schnelle
+ + + + + +− −
Strahler−Schnelle
+ + + + + +− − − − − −
Ersatzquellen
Strahler−Schnelle
+ + + + +− − − − −
Ersatzquellen
Abb. 4.7. Ersatzquellen fur kurzwellige Strahler mit Schwingungsbauch oderSchwingungsknoten an den Randern
Abb. 4.8. Schallfeld eines kurzwelligen Strahlers mit Schwingungsknoten am obe-ren, Schwingungsbauch am unteren Ende. Der Schwingungsknoten am oberen Endebildet eine Volumenquelle, um die herum sich eine Schallausbreitung mit kreisformi-gen Wellenfronten ergibt. Der Bauch am unteren Ende strahlt fast nicht.
4.5 Dreidimensionale Behandlung
Im dreidimensionalen Fall geht man in analoger Weise vor, wobei diesmaleine zweidimensionale Fourier-Transformation durchgefuhrt wird. Fur das Fol-gende wird die Strahler-Ebene mit z = 0 bezeichnet.
Diesmal muss bezuglich der beiden Koordinaten der Strahler-Ebene trans-formiert werden. Mit der Transformierten
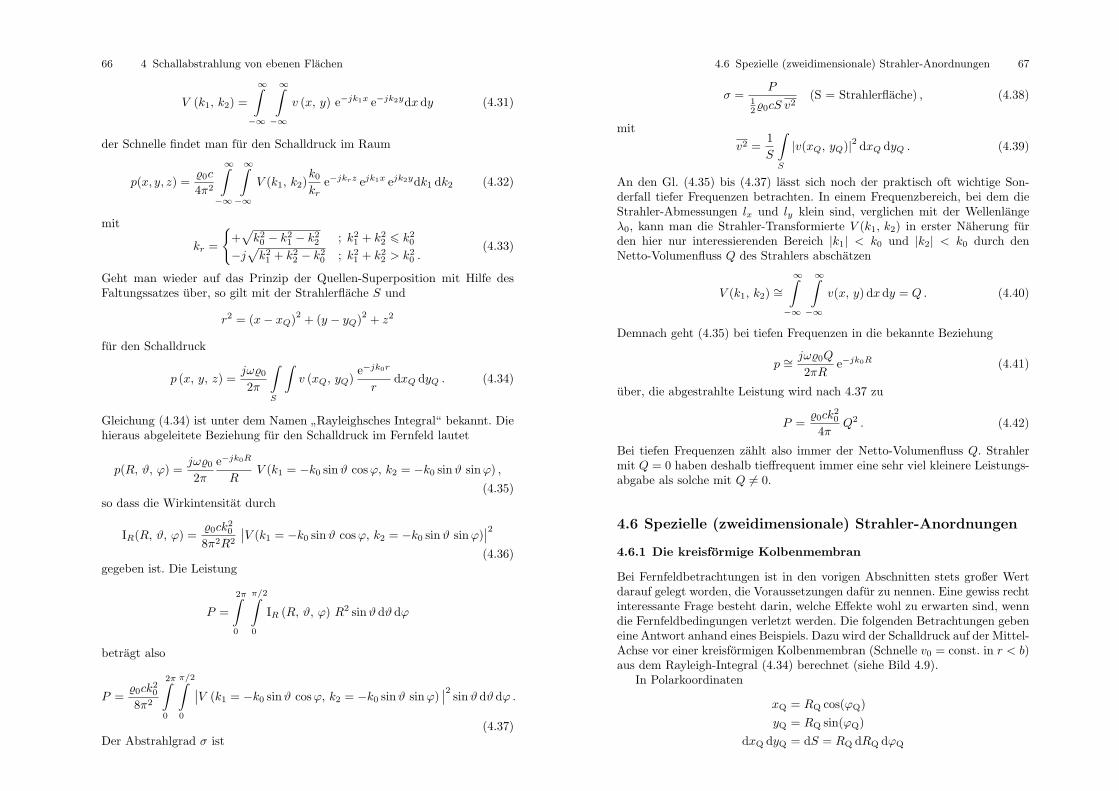
66 4 Schallabstrahlung von ebenen Flachen
V (k1, k2) =
∞∫−∞
∞∫−∞
v (x, y) e−jk1x e−jk2ydx dy (4.31)
der Schnelle findet man fur den Schalldruck im Raum
p(x, y, z) =%0c
4π2
∞∫−∞
∞∫−∞
V (k1, k2)k0
kre−jkrz ejk1x ejk2ydk1 dk2 (4.32)
mit
kr =
{+√k2
0 − k21 − k2
2 ; k21 + k2
2 6 k20
−j√k2
1 + k22 − k2
0 ; k21 + k2
2 > k20 .
(4.33)
Geht man wieder auf das Prinzip der Quellen-Superposition mit Hilfe desFaltungssatzes uber, so gilt mit der Strahlerflache S und
r2 = (x− xQ)2 + (y − yQ)2 + z2
fur den Schalldruck
p (x, y, z) =jω%0
2π
∫S
∫v (xQ, yQ)
e−jk0r
rdxQ dyQ . (4.34)
Gleichung (4.34) ist unter dem Namen ”Rayleighsches Integral“ bekannt. Diehieraus abgeleitete Beziehung fur den Schalldruck im Fernfeld lautet
p(R, ϑ, ϕ) =jω%0
2πe−jk0R
RV (k1 = −k0 sinϑ cosϕ, k2 = −k0 sinϑ sinϕ) ,
(4.35)so dass die Wirkintensitat durch
IR(R, ϑ, ϕ) =%0ck
20
8π2R2
∣∣V (k1 = −k0 sinϑ cosϕ, k2 = −k0 sinϑ sinϕ)∣∣2(4.36)
gegeben ist. Die Leistung
P =
2π∫0
π/2∫0
IR (R, ϑ, ϕ) R2 sinϑdϑ dϕ
betragt also
P =%0ck
20
8π2
2π∫0
π/2∫0
∣∣V (k1 = −k0 sinϑ cosϕ, k2 = −k0 sinϑ sinϕ)∣∣2 sinϑ dϑdϕ .
(4.37)Der Abstrahlgrad σ ist
4.6 Spezielle (zweidimensionale) Strahler-Anordnungen 67
σ =P
12%0cS v2
(S = Strahlerflache) , (4.38)
mitv2 =
1S
∫S
|v(xQ, yQ)|2 dxQ dyQ . (4.39)
An den Gl. (4.35) bis (4.37) lasst sich noch der praktisch oft wichtige Son-derfall tiefer Frequenzen betrachten. In einem Frequenzbereich, bei dem dieStrahler-Abmessungen lx und ly klein sind, verglichen mit der Wellenlangeλ0, kann man die Strahler-Transformierte V (k1, k2) in erster Naherung furden hier nur interessierenden Bereich |k1| < k0 und |k2| < k0 durch denNetto-Volumenfluss Q des Strahlers abschatzen
V (k1, k2) ∼=∞∫−∞
∞∫−∞
v(x, y) dxdy = Q . (4.40)
Demnach geht (4.35) bei tiefen Frequenzen in die bekannte Beziehung
p ∼= jω%0Q
2πRe−jk0R (4.41)
uber, die abgestrahlte Leistung wird nach 4.37 zu
P =%0ck
20
4πQ2 . (4.42)
Bei tiefen Frequenzen zahlt also immer der Netto-Volumenfluss Q. Strahlermit Q = 0 haben deshalb tieffrequent immer eine sehr viel kleinere Leistungs-abgabe als solche mit Q 6= 0.
4.6 Spezielle (zweidimensionale) Strahler-Anordnungen
4.6.1 Die kreisformige Kolbenmembran
Bei Fernfeldbetrachtungen ist in den vorigen Abschnitten stets großer Wertdarauf gelegt worden, die Voraussetzungen dafur zu nennen. Eine gewiss rechtinteressante Frage besteht darin, welche Effekte wohl zu erwarten sind, wenndie Fernfeldbedingungen verletzt werden. Die folgenden Betrachtungen gebeneine Antwort anhand eines Beispiels. Dazu wird der Schalldruck auf der Mittel-Achse vor einer kreisformigen Kolbenmembran (Schnelle v0 = const. in r < b)aus dem Rayleigh-Integral (4.34) berechnet (siehe Bild 4.9).
In Polarkoordinaten
xQ = RQ cos(ϕQ)yQ = RQ sin(ϕQ)
dxQ dyQ = dS = RQ dRQ dϕQ
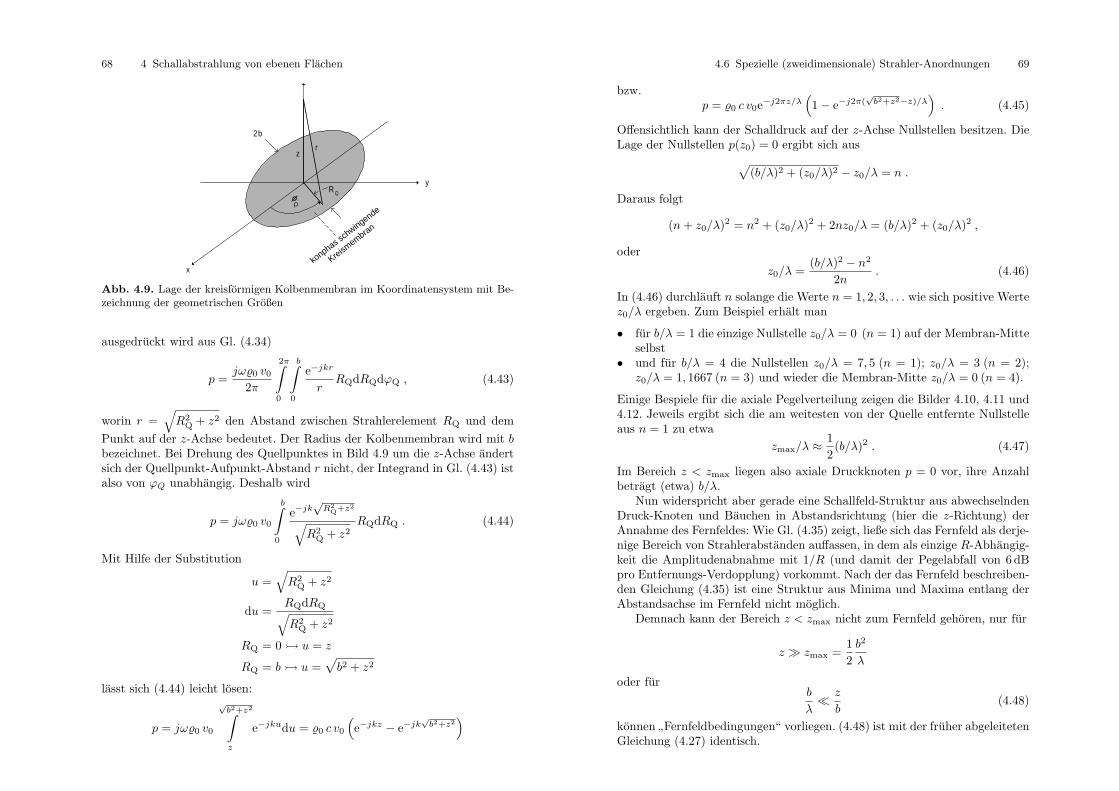
68 4 Schallabstrahlung von ebenen Flachen
r
R QϕQ
z
x
y
2b
konphas s
chwingende
Kreismembran
Abb. 4.9. Lage der kreisformigen Kolbenmembran im Koordinatensystem mit Be-zeichnung der geometrischen Großen
ausgedruckt wird aus Gl. (4.34)
p =jω%0 v0
2π
2π∫0
b∫0
e−jkr
rRQdRQdϕQ , (4.43)
worin r =√R2
Q + z2 den Abstand zwischen Strahlerelement RQ und demPunkt auf der z-Achse bedeutet. Der Radius der Kolbenmembran wird mit bbezeichnet. Bei Drehung des Quellpunktes in Bild 4.9 um die z-Achse andertsich der Quellpunkt-Aufpunkt-Abstand r nicht, der Integrand in Gl. (4.43) istalso von ϕQ unabhangig. Deshalb wird
p = jω%0 v0
b∫0
e−jk√R2
Q+z2√R2
Q + z2RQdRQ . (4.44)
Mit Hilfe der Substitution
u =√R2
Q + z2
du =RQdRQ√R2
Q + z2
RQ = 0� u = z
RQ = b� u =√b2 + z2
lasst sich (4.44) leicht losen:
p = jω%0 v0
√b2+z2∫z
e−jkudu = %0 c v0
(e−jkz − e−jk
√b2+z2
)
4.6 Spezielle (zweidimensionale) Strahler-Anordnungen 69
bzw.p = %0 c v0e−j2πz/λ
(1− e−j2π(
√b2+z2−z)/λ
). (4.45)
Offensichtlich kann der Schalldruck auf der z-Achse Nullstellen besitzen. DieLage der Nullstellen p(z0) = 0 ergibt sich aus√
(b/λ)2 + (z0/λ)2 − z0/λ = n .
Daraus folgt
(n+ z0/λ)2 = n2 + (z0/λ)2 + 2nz0/λ = (b/λ)2 + (z0/λ)2 ,
oder
z0/λ =(b/λ)2 − n2
2n. (4.46)
In (4.46) durchlauft n solange die Werte n = 1, 2, 3, . . . wie sich positive Wertez0/λ ergeben. Zum Beispiel erhalt man
• fur b/λ = 1 die einzige Nullstelle z0/λ = 0 (n = 1) auf der Membran-Mitteselbst
• und fur b/λ = 4 die Nullstellen z0/λ = 7, 5 (n = 1); z0/λ = 3 (n = 2);z0/λ = 1, 1667 (n = 3) und wieder die Membran-Mitte z0/λ = 0 (n = 4).
Einige Bespiele fur die axiale Pegelverteilung zeigen die Bilder 4.10, 4.11 und4.12. Jeweils ergibt sich die am weitesten von der Quelle entfernte Nullstelleaus n = 1 zu etwa
zmax/λ ≈ 12
(b/λ)2 . (4.47)
Im Bereich z < zmax liegen also axiale Druckknoten p = 0 vor, ihre Anzahlbetragt (etwa) b/λ.
Nun widerspricht aber gerade eine Schallfeld-Struktur aus abwechselndenDruck-Knoten und Bauchen in Abstandsrichtung (hier die z-Richtung) derAnnahme des Fernfeldes: Wie Gl. (4.35) zeigt, ließe sich das Fernfeld als derje-nige Bereich von Strahlerabstanden auffassen, in dem als einzige R-Abhangig-keit die Amplitudenabnahme mit 1/R (und damit der Pegelabfall von 6 dBpro Entfernungs-Verdopplung) vorkommt. Nach der das Fernfeld beschreiben-den Gleichung (4.35) ist eine Struktur aus Minima und Maxima entlang derAbstandsachse im Fernfeld nicht moglich.
Demnach kann der Bereich z < zmax nicht zum Fernfeld gehoren, nur fur
z � zmax =12b2
λ
oder furb
λ� z
b(4.48)
konnen ”Fernfeldbedingungen“ vorliegen. (4.48) ist mit der fruher abgeleitetenGleichung (4.27) identisch.
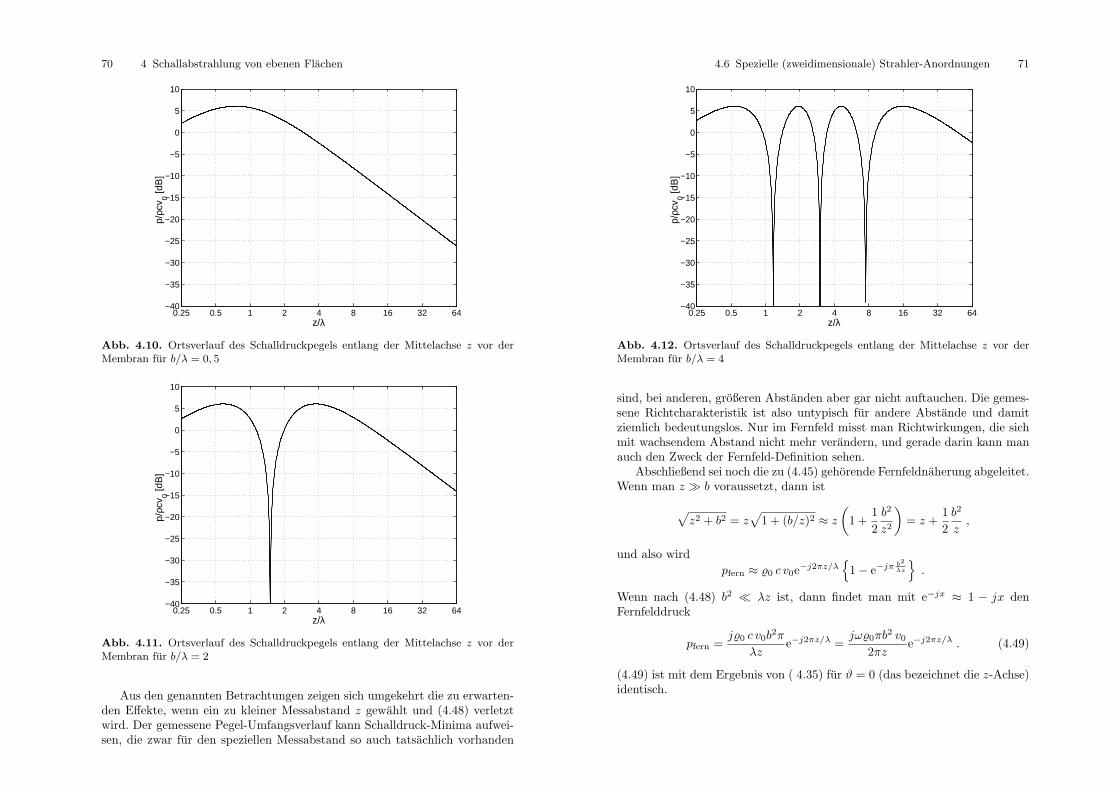
70 4 Schallabstrahlung von ebenen Flachen
0.25 0.5 1 2 4 8 16 32 64−40
−35
−30
−25
−20
−15
−10
−5
0
5
10
z/λ
p/ρc
v 0 [dB
]
Abb. 4.10. Ortsverlauf des Schalldruckpegels entlang der Mittelachse z vor derMembran fur b/λ = 0, 5
0.25 0.5 1 2 4 8 16 32 64−40
−35
−30
−25
−20
−15
−10
−5
0
5
10
z/λ
p/ρc
v 0 [dB
]
Abb. 4.11. Ortsverlauf des Schalldruckpegels entlang der Mittelachse z vor derMembran fur b/λ = 2
Aus den genannten Betrachtungen zeigen sich umgekehrt die zu erwarten-den Effekte, wenn ein zu kleiner Messabstand z gewahlt und (4.48) verletztwird. Der gemessene Pegel-Umfangsverlauf kann Schalldruck-Minima aufwei-sen, die zwar fur den speziellen Messabstand so auch tatsachlich vorhanden
4.6 Spezielle (zweidimensionale) Strahler-Anordnungen 71
0.25 0.5 1 2 4 8 16 32 64−40
−35
−30
−25
−20
−15
−10
−5
0
5
10
z/λ
p/ρc
v 0 [dB
]
Abb. 4.12. Ortsverlauf des Schalldruckpegels entlang der Mittelachse z vor derMembran fur b/λ = 4
sind, bei anderen, großeren Abstanden aber gar nicht auftauchen. Die gemes-sene Richtcharakteristik ist also untypisch fur andere Abstande und damitziemlich bedeutungslos. Nur im Fernfeld misst man Richtwirkungen, die sichmit wachsendem Abstand nicht mehr verandern, und gerade darin kann manauch den Zweck der Fernfeld-Definition sehen.
Abschließend sei noch die zu (4.45) gehorende Fernfeldnaherung abgeleitet.Wenn man z � b voraussetzt, dann ist√
z2 + b2 = z√
1 + (b/z)2 ≈ z(
1 +12b2
z2
)= z +
12b2
z,
und also wirdpfern ≈ %0 c v0e−j2πz/λ
{1− e−jπ
b2λz
}.
Wenn nach (4.48) b2 � λz ist, dann findet man mit e−jx ≈ 1 − jx denFernfelddruck
pfern =j%0 c v0b
2π
λze−j2πz/λ =
jω%0πb2 v0
2πze−j2πz/λ . (4.49)
(4.49) ist mit dem Ergebnis von ( 4.35) fur ϑ = 0 (das bezeichnet die z-Achse)identisch.
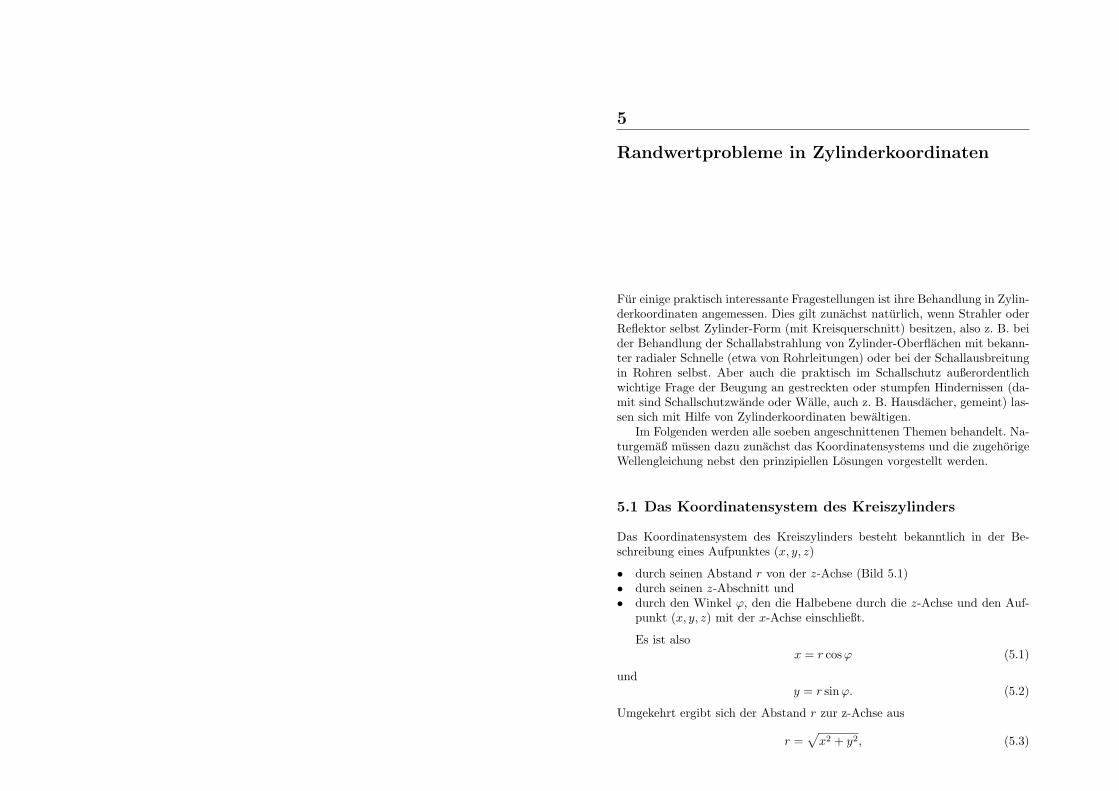
5
Randwertprobleme in Zylinderkoordinaten
Fur einige praktisch interessante Fragestellungen ist ihre Behandlung in Zylin-derkoordinaten angemessen. Dies gilt zunachst naturlich, wenn Strahler oderReflektor selbst Zylinder-Form (mit Kreisquerschnitt) besitzen, also z. B. beider Behandlung der Schallabstrahlung von Zylinder-Oberflachen mit bekann-ter radialer Schnelle (etwa von Rohrleitungen) oder bei der Schallausbreitungin Rohren selbst. Aber auch die praktisch im Schallschutz außerordentlichwichtige Frage der Beugung an gestreckten oder stumpfen Hindernissen (da-mit sind Schallschutzwande oder Walle, auch z. B. Hausdacher, gemeint) las-sen sich mit Hilfe von Zylinderkoordinaten bewaltigen.
Im Folgenden werden alle soeben angeschnittenen Themen behandelt. Na-turgemaß mussen dazu zunachst das Koordinatensystems und die zugehorigeWellengleichung nebst den prinzipiellen Losungen vorgestellt werden.
5.1 Das Koordinatensystem des Kreiszylinders
Das Koordinatensystem des Kreiszylinders besteht bekanntlich in der Be-schreibung eines Aufpunktes (x, y, z)
• durch seinen Abstand r von der z-Achse (Bild 5.1)• durch seinen z-Abschnitt und• durch den Winkel ϕ, den die Halbebene durch die z-Achse und den Auf-
punkt (x, y, z) mit der x-Achse einschließt.
Es ist alsox = r cosϕ (5.1)
undy = r sinϕ. (5.2)
Umgekehrt ergibt sich der Abstand r zur z-Achse aus
r =√x2 + y2, (5.3)
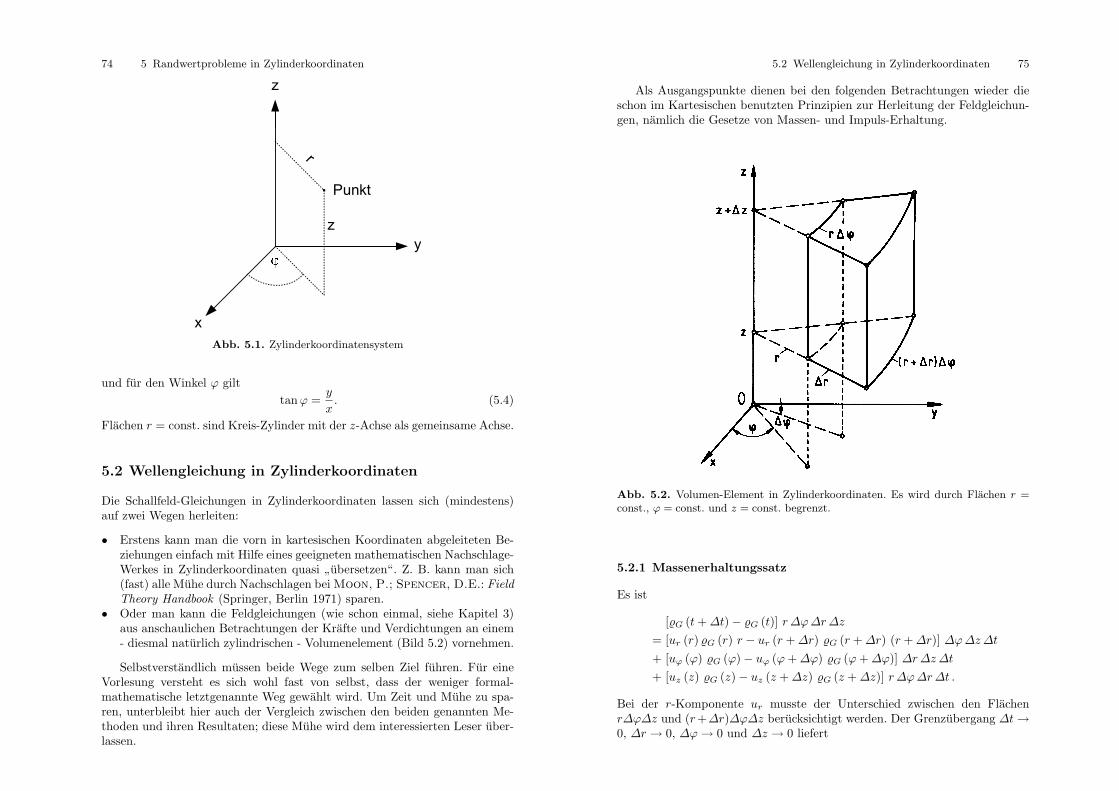
74 5 Randwertprobleme in Zylinderkoordinaten
Abb. 5.1. Zylinderkoordinatensystem
und fur den Winkel ϕ gilttanϕ =
y
x. (5.4)
Flachen r = const. sind Kreis-Zylinder mit der z-Achse als gemeinsame Achse.
5.2 Wellengleichung in Zylinderkoordinaten
Die Schallfeld-Gleichungen in Zylinderkoordinaten lassen sich (mindestens)auf zwei Wegen herleiten:
• Erstens kann man die vorn in kartesischen Koordinaten abgeleiteten Be-ziehungen einfach mit Hilfe eines geeigneten mathematischen Nachschlage-Werkes in Zylinderkoordinaten quasi ”ubersetzen“. Z. B. kann man sich(fast) alle Muhe durch Nachschlagen bei Moon, P.; Spencer, D.E.: FieldTheory Handbook (Springer, Berlin 1971) sparen.
• Oder man kann die Feldgleichungen (wie schon einmal, siehe Kapitel 3)aus anschaulichen Betrachtungen der Krafte und Verdichtungen an einem- diesmal naturlich zylindrischen - Volumenelement (Bild 5.2) vornehmen.
Selbstverstandlich mussen beide Wege zum selben Ziel fuhren. Fur eineVorlesung versteht es sich wohl fast von selbst, dass der weniger formal-mathematische letztgenannte Weg gewahlt wird. Um Zeit und Muhe zu spa-ren, unterbleibt hier auch der Vergleich zwischen den beiden genannten Me-thoden und ihren Resultaten; diese Muhe wird dem interessierten Leser uber-lassen.
5.2 Wellengleichung in Zylinderkoordinaten 75
Als Ausgangspunkte dienen bei den folgenden Betrachtungen wieder dieschon im Kartesischen benutzten Prinzipien zur Herleitung der Feldgleichun-gen, namlich die Gesetze von Massen- und Impuls-Erhaltung.
Abb. 5.2. Volumen-Element in Zylinderkoordinaten. Es wird durch Flachen r =const., ϕ = const. und z = const. begrenzt.
5.2.1 Massenerhaltungssatz
Es ist
[%G (t+∆t)− %G (t)] r ∆ϕ∆r∆z= [ur (r) %G (r) r − ur (r +∆r) %G (r +∆r) (r +∆r)] ∆ϕ∆z∆t+ [uϕ (ϕ) %G (ϕ)− uϕ (ϕ+∆ϕ) %G (ϕ+∆ϕ)] ∆r∆z∆t+ [uz (z) %G (z)− uz (z +∆z) %G (z +∆z)] r ∆ϕ∆r∆t .
Bei der r-Komponente ur musste der Unterschied zwischen den Flachenr∆ϕ∆z und (r+∆r)∆ϕ∆z berucksichtigt werden. Der Grenzubergang ∆t→0, ∆r → 0, ∆ϕ→ 0 und ∆z → 0 liefert
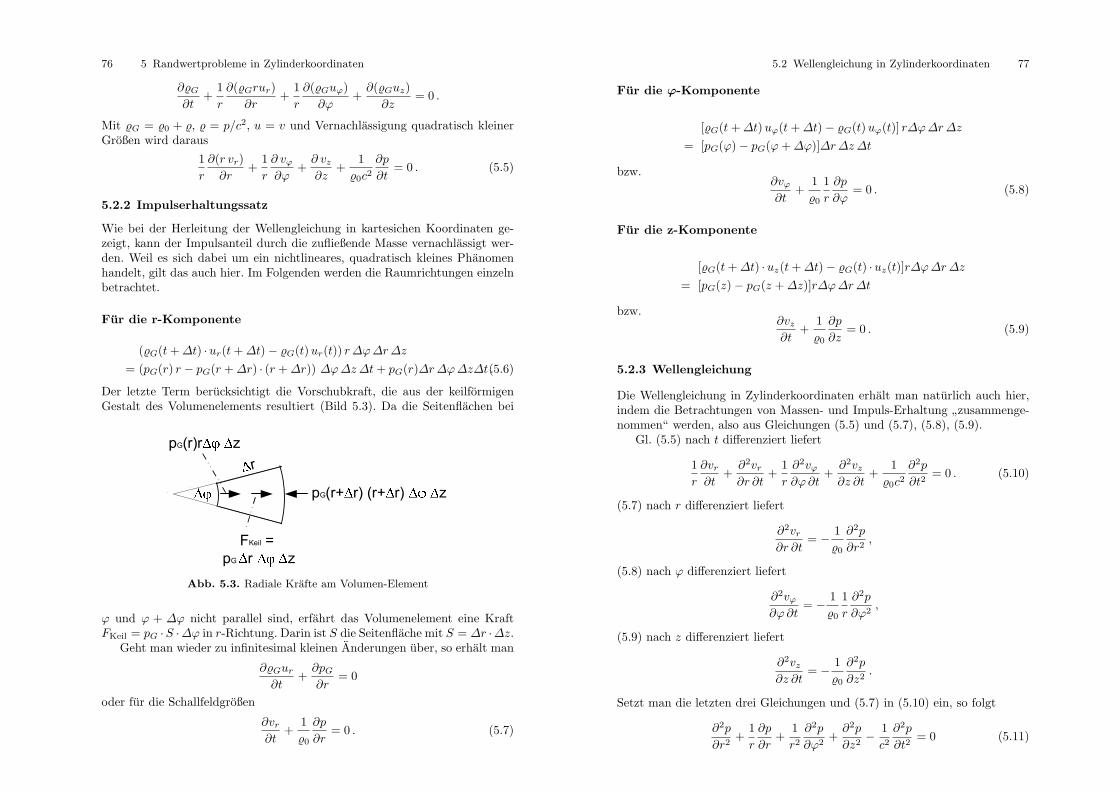
76 5 Randwertprobleme in Zylinderkoordinaten
∂%G∂t
+1r
∂(%Grur)∂r
+1r
∂(%Guϕ)∂ϕ
+∂(%Guz)∂z
= 0 .
Mit %G = %0 + %, % = p/c2, u = v und Vernachlassigung quadratisch kleinerGroßen wird daraus
1r
∂(r vr)∂r
+1r
∂ vϕ∂ϕ
+∂ vz∂z
+1
%0c2∂p
∂t= 0 . (5.5)
5.2.2 Impulserhaltungssatz
Wie bei der Herleitung der Wellengleichung in kartesichen Koordinaten ge-zeigt, kann der Impulsanteil durch die zufließende Masse vernachlassigt wer-den. Weil es sich dabei um ein nichtlineares, quadratisch kleines Phanomenhandelt, gilt das auch hier. Im Folgenden werden die Raumrichtungen einzelnbetrachtet.
Fur die r-Komponente
(%G(t+∆t) ·ur(t+∆t)− %G(t)ur(t)) r ∆ϕ∆r∆z= (pG(r) r − pG(r +∆r) · (r +∆r)) ∆ϕ∆z∆t+ pG(r)∆r∆ϕ∆z∆t .(5.6)
Der letzte Term berucksichtigt die Vorschubkraft, die aus der keilformigenGestalt des Volumenelements resultiert (Bild 5.3). Da die Seitenflachen bei
FKeil =
pG r z
pG(r+ r) (r+ r) z
r
pG(r)r z
Abb. 5.3. Radiale Krafte am Volumen-Element
ϕ und ϕ + ∆ϕ nicht parallel sind, erfahrt das Volumenelement eine KraftFKeil = pG ·S ·∆ϕ in r-Richtung. Darin ist S die Seitenflache mit S = ∆r ·∆z.
Geht man wieder zu infinitesimal kleinen Anderungen uber, so erhalt man
∂%Gur∂t
+∂pG∂r
= 0
oder fur die Schallfeldgroßen
∂vr∂t
+1%0
∂p
∂r= 0 . (5.7)
5.2 Wellengleichung in Zylinderkoordinaten 77
Fur die ϕ-Komponente
[%G(t+∆t)uϕ(t+∆t)− %G(t)uϕ(t)] r∆ϕ∆r∆z= [pG(ϕ)− pG(ϕ+∆ϕ)]∆r∆z∆t
bzw.∂vϕ∂t
+1%0
1r
∂p
∂ϕ= 0 . (5.8)
Fur die z-Komponente
[%G(t+∆t) ·uz(t+∆t)− %G(t) ·uz(t)]r∆ϕ∆r∆z= [pG(z)− pG(z +∆z)]r∆ϕ∆r∆t
bzw.∂vz∂t
+1%0
∂p
∂z= 0 . (5.9)
5.2.3 Wellengleichung
Die Wellengleichung in Zylinderkoordinaten erhalt man naturlich auch hier,indem die Betrachtungen von Massen- und Impuls-Erhaltung ”zusammenge-nommen“ werden, also aus Gleichungen (5.5) und (5.7), (5.8), (5.9).
Gl. (5.5) nach t differenziert liefert
1r
∂vr∂t
+∂2vr∂r ∂t
+1r
∂2vϕ∂ϕ∂t
+∂2vz∂z ∂t
+1
%0c2∂2p
∂t2= 0 . (5.10)
(5.7) nach r differenziert liefert
∂2vr∂r ∂t
= − 1%0
∂2p
∂r2,
(5.8) nach ϕ differenziert liefert
∂2vϕ∂ϕ∂t
= − 1%0
1r
∂2p
∂ϕ2,
(5.9) nach z differenziert liefert
∂2vz∂z ∂t
= − 1%0
∂2p
∂z2.
Setzt man die letzten drei Gleichungen und (5.7) in (5.10) ein, so folgt
∂2p
∂r2+
1r
∂p
∂r+
1r2
∂2p
∂ϕ2+∂2p
∂z2− 1c2∂2p
∂t2= 0 (5.11)

78 5 Randwertprobleme in Zylinderkoordinaten
die Wellengleichung in Zylinderkoordinaten. Wenn entweder nur reine Tonezugelassen sind oder eine zeitliche Fourier-Transformation durchgefuhrt wird,so geht die Wellengleichung (5.11) uber in die sogenannte ”Helmholtz-Glei-chung“
∂2p
∂r2+
1r
∂p
∂r+
1r2
∂2p
∂ϕ2+∂2p
∂z2+ k2
0 p = 0 , (5.12)
wobei unter p dann die komplexe Amplitude bzw. die (zeitliche) Fourier-Transformierte des Schalldrucks zu verstehen ist. Oft wird hier in diesemSkript die Helmholtz-Gleichung kurz auch als Wellengleichung bezeichnet (ob-wohl erstere eigentlich ein Spezialfall ist); es wird also nicht extra unterschie-den.
5.3 Ebene Probleme
Im Folgenden werden zunachst Schallfelder betrachtet, die sich entlang derz-Achse nicht andern, also ebene Probleme, fur die
∂/∂z = 0
gilt. Die Grunde dafur liegen nicht nur darin, dass damit naturlich eine Ver-einfachung einhergeht, die schon aus didaktischen Uberlegungen als Anfangs-punkt sinnvoll erscheint. In vielen Fallen genugt es durchaus, wenigstens dochabschnittsweise entlang der z-Achse konstante Felder zu betrachten. Das istzum Beispiel bei der Reflexion an Zylinder-Flachen der Fall, wenn die (eigent-lich punktformige) Quelle sich im großeren Abstand vom Reflektor befindet:dann trifft innerhalb eines vernunftig gewahlten Abschnitts der z-Achse eineebene Welle auf.
5.3.1 Losungen der Wellengleichung
Im ebenen Fall ∂/∂z = 0 vereinfacht sich die Wellengleichung (5.12) zu
∂2p
∂r2+
1r
∂p
∂r+
1r2
∂2p
∂ϕ2+ k2
0 p = 0 (5.13)
Die beiden nachsten Abschnitte 5.3.2 und 5.3.3 dienen der Behandlung
• der Schallabstrahlung von Zylinder-Flachen und• der Reflexion an Zylindern.
Bei beiden Aufgaben liegen die zylindrischen Korper-Strahler oder Reflektorenim freien Medium (aus Luft oder Gas oder Fluid), uber dem Umfangswinkelϕ muss das Schallfeld hier also immer ”an sich selbst anschließen“, wenn manden Aufpunkt um 2π in Umfangsrichtung wandern lasst:
p(r, ϕ) = p(r, ϕ+ 2π) . (5.14)
5.3 Ebene Probleme 79
Gl. (5.14) besagt einfach, dass das Schallfeld uber ϕ mit 2π periodisch seinmuss. Aus diesem Grunde muss eine Reihendarstellung des Schallfeldes in derForm
p(r, ϕ) =∞∑n=0
an fn(r) cos(nϕ) +∞∑n=1
bn fn(r) sin(nϕ) (5.15)
moglich sein.
Naturlich hangt das Schallfeld noch von r ab, das ist in (5.15) auchberucksichtigt. Weil das Einsetzen von cos(nϕ)- und sin(nϕ)- Anteilen in dieWellengleichung zur selben gewohnlichen Differential-Gleichung fuhrt, sinddie r-Abhangigkeiten fur beide Bestandteile die gleichen (siehe unten). In(5.15) sind gerade Feld-Bestandteile p(ϕ) = p(−ϕ) und ungerade Anteilep(ϕ) = −p(−ϕ) einfach getrennt aufgefuhrt worden. Diese Schreibweise hatden Vorteil, dass man auf negative n verzichten kann. Hatte man
p(r, ϕ) =∞∑
n=−∞an fn(r) ejnϕ
angesetzt, ware das nicht der Fall. Fur symmetrische p(ϕ) = p(−ϕ) – die janaturlich vorkommen konnen – muss man hier zwingend negative Ordnungenn zulassen.
Man kann hieran sehen, dass Ansatze immer eine gewisse Willkur enthal-ten. Sie ”moglichst einfach“ zu machen, erfordert auch eine gewisse Erfahrung,von der hier ja gerade berichtet wird.Wenn man nur den oberen oder den unteren Anteil von (5.15) in die Wellen-gleichung (5.13) einsetzt, dann gelangt man direkt zur Differentialgleichung
d2fndr2
+1r
dfndr
+(k2
0 −n2
r2
)fn = 0 (5.16)
fur die bisher noch unbekannten r-abhangigen Funktionen fn(r).Wenn mannoch durch die quadrierte Wellenzahl teilt:
d2fnk2
0dr2+
1k0r
dfnk0dr
+(
1− n2
k20r
2
)fn = 0 ,
so erkennt man, dass fn nur vom Produkt k0r abhangt. Deshalb wird diedimensionslose Variable
x = k0r
eingefuhrt (das ist also nicht etwa die x-Koordinate x). Mit ihr wird aus (5.16)
d2fndx2
+1x
dfndx
+(
1− n2
x2
)fn = 0 . (5.17)
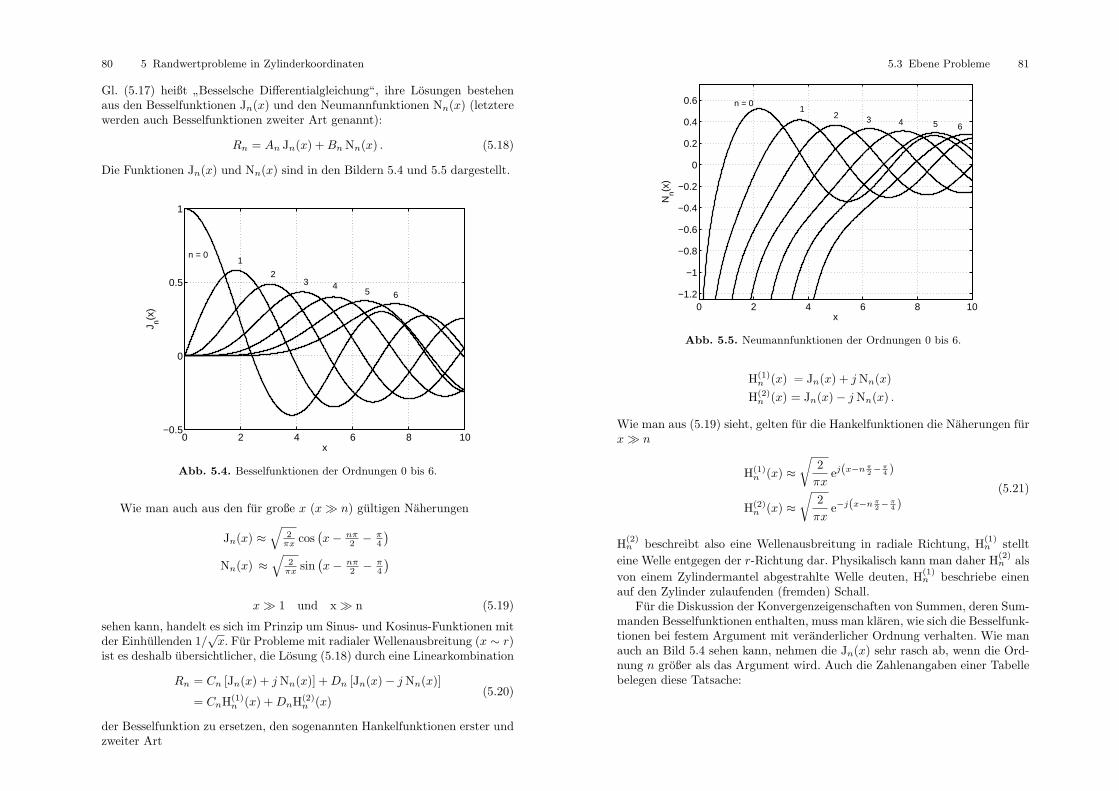
80 5 Randwertprobleme in Zylinderkoordinaten
Gl. (5.17) heißt ”Besselsche Differentialgleichung“, ihre Losungen bestehenaus den Besselfunktionen Jn(x) und den Neumannfunktionen Nn(x) (letzterewerden auch Besselfunktionen zweiter Art genannt):
Rn = An Jn(x) +Bn Nn(x) . (5.18)
Die Funktionen Jn(x) und Nn(x) sind in den Bildern 5.4 und 5.5 dargestellt.
0 2 4 6 8 10−0.5
0
0.5
1
x
J n(x)
n = 01
23 4
5 6
Abb. 5.4. Besselfunktionen der Ordnungen 0 bis 6.
Wie man auch aus den fur große x (x� n) gultigen Naherungen
Jn(x) ≈√
2πx cos
(x− nπ
2 − π4
)Nn(x) ≈
√2πx sin
(x− nπ
2 − π4
)x� 1 und x� n (5.19)
sehen kann, handelt es sich im Prinzip um Sinus- und Kosinus-Funktionen mitder Einhullenden 1/
√x. Fur Probleme mit radialer Wellenausbreitung (x ∼ r)
ist es deshalb ubersichtlicher, die Losung (5.18) durch eine Linearkombination
Rn = Cn [Jn(x) + jNn(x)] +Dn [Jn(x)− jNn(x)]
= CnH(1)n (x) +DnH(2)
n (x)(5.20)
der Besselfunktion zu ersetzen, den sogenannten Hankelfunktionen erster undzweiter Art
5.3 Ebene Probleme 81
0 2 4 6 8 10−1.2
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
x
Nn(x
)
n = 01
2 3 4 5 6
Abb. 5.5. Neumannfunktionen der Ordnungen 0 bis 6.
H(1)n (x) = Jn(x) + jNn(x)
H(2)n (x) = Jn(x)− jNn(x) .
Wie man aus (5.19) sieht, gelten fur die Hankelfunktionen die Naherungen furx� n
H(1)n (x) ≈
√2πx
ej(x−nπ2−π4 )
H(2)n (x) ≈
√2πx
e−j(x−nπ2−π4 )
(5.21)
H(2)n beschreibt also eine Wellenausbreitung in radiale Richtung, H(1)
n stellteine Welle entgegen der r-Richtung dar. Physikalisch kann man daher H(2)
n alsvon einem Zylindermantel abgestrahlte Welle deuten, H(1)
n beschriebe einenauf den Zylinder zulaufenden (fremden) Schall.
Fur die Diskussion der Konvergenzeigenschaften von Summen, deren Sum-manden Besselfunktionen enthalten, muss man klaren, wie sich die Besselfunk-tionen bei festem Argument mit veranderlicher Ordnung verhalten. Wie manauch an Bild 5.4 sehen kann, nehmen die Jn(x) sehr rasch ab, wenn die Ord-nung n großer als das Argument wird. Auch die Zahlenangaben einer Tabellebelegen diese Tatsache:

82 5 Randwertprobleme in Zylinderkoordinaten
Tabelle 5.1. Jn(x) fur x = const. (Beispiele)
n Jn(1) Jn(2) Jn(4)
0 0,765 0,224 - 0,3971 0,440 0,577 - 0,0662 0,115 0,353 0,3643 0,020 0,129 0,4304 0,248 · 10−2 0,034 0,2815 0,250 · 10−3 0,704 · 10−2 0,1326 0,210 · 10−4 0,120 · 10−2 0,0497 0,150 · 10−5 0,175 · 10−3 0,0168 0,940 · 10−7 0,222 · 10−4 0,403 · 10−2
Der Literatur (siehe Abramowitz, M.; Stegun, I.A.: Handbook of Ma-thematical Functions, Cover Books, S. 365 Nr. 9.3.1) kann man auch die fol-gende, fur x � n geltende Naherung entnehmen (e=Basis der Exponential-Funktion = 2,7183):
fur x� n : Jn(x) ∼= 1√2πn
(e ·x2n
)n. (5.22)
Auch sie besagt, dass Jn(x) mit wachsendem n ab einer kritischen Grenzen = N außerordentlich rasch gegen Null konvergiert: ist 2n in Gleichung(5.22) erst einmal großer als ex, dann ist das Argument in der Klammer,ex/2n, kleiner als 1, und deshalb ist Jn(x) eine sehr, sehr kleine Zahl. Mankann also stets die Besselfunktionen Jn mit n� x gegenuber denen mit n ≤ xvernachlassigen.
Gerade umgekehrt verhalten sich die Neumannfunktionen. Wie man auchan Bild 5.5 sehen kann, wachsen die Nn(x) dramatisch bei festem x und zu-nehmendem n an, wenn n großer als x wird. Deshalb ist auch (siehe wiederdas Werk von Abramowitz und Stegun)
Nn(x) ∼= −√
2πn
(e ·x2n
)−n. (5.23)
Theoreme fur die Besselfunktionen
Im Folgenden werden noch einige fur den praktischen Gebrauch nutzliche For-meln angegeben. Dabei kann fur zn(x) sowohl Jn(x), Nn(x), H(1)
n (x), H(2)n (x)
als auch jede beliebige Linearkombination dieser Funktionen eingesetzt wer-den.
Ableitung:dzndx
= zn−1 − n
xzn (5.24a)
Rekursion: zn+1 =2nxzn − zn−1 (5.24b)
negative Ordnung: z−n = (−1)n zn (5.24c)
5.3 Ebene Probleme 83
Naherungen fur kleine Argumente x� 1:
Jn(x) ≈(x
2
)n 1n!
(5.25)
Nn(x) ≈ −(x
2
)−n (n− 1)!π
fur n 6= 0 (5.26)
N0(x) ≈ 2π
lnx (5.27)
Orthogonalitats-Relationen
Seien mit αv die Nullstellen der Ableitung J′n(x) von Jn(x) bezeichnet, alsoJ′n(αv) = 0, dann gilt:
1∫0
Jn(αµx) · Jn(αvx) x dx =
{0 µ 6= v12
(1− n2
α2v
)J2n(αv) µ = v
(5.28)
Seien mit βv die Nullstellen von Jn(x) bezeichnet, also Jn(βv) = 0, dann gilt:
1∫0
Jn(βvx) · Jn(βµx) xdx =
{0 µ 6= v12 (Jn(βv))2 µ = v
(5.29)
Wronski-Determinante:
Jn+1(x) ·Nn(x)− Jn(x) ·Nn+1(x) =2πx
(5.30a)
wegen (5.24a) und (5.24b) gilt dann auch
Jn(x) ·N′n(x)− J′n(x) ·Nn(x) =2πx
(5.30b)
(′ = Ableitung nach x, Beweis durch Einsetzen von (5.22))
5.3.2 Abstrahlung von Zylinder-Oberflachen
In diesem Abschnitt wird angenommen, dass die radial nach außen weisendeSchallschnelle V (ϕ) auf der Zylinderoberflache r = b (hier also eigentlichwegen ∂/∂z = 0 auf dem Kreis r = b) bekannt sei. Weil im unendlichenRaum außerhalb des Zylinders r > b keine Reflektoren oder sonstwie gearteteQuellen vorkommen sollen, setzt man fur die fn(r) in Gleichung (5.15) nurdie radial nach außen laufenden Hankelfunktionen zweiter Art an:
p(r, ϕ) =∞∑n=0
anH(2)n (k0r) cos(nϕ) . (5.31)
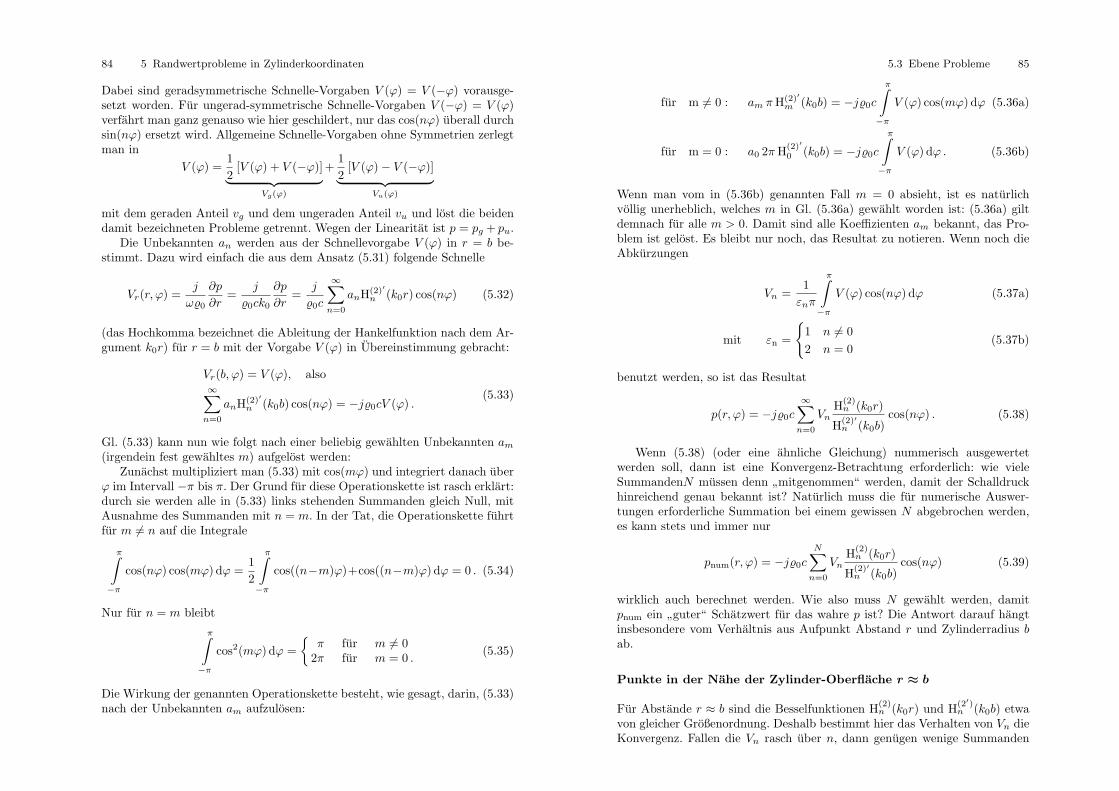
84 5 Randwertprobleme in Zylinderkoordinaten
Dabei sind geradsymmetrische Schnelle-Vorgaben V (ϕ) = V (−ϕ) vorausge-setzt worden. Fur ungerad-symmetrische Schnelle-Vorgaben V (−ϕ) = V (ϕ)verfahrt man ganz genauso wie hier geschildert, nur das cos(nϕ) uberall durchsin(nϕ) ersetzt wird. Allgemeine Schnelle-Vorgaben ohne Symmetrien zerlegtman in
V (ϕ) =12
[V (ϕ) + V (−ϕ)]︸ ︷︷ ︸Vg(ϕ)
+12
[V (ϕ)− V (−ϕ)]︸ ︷︷ ︸Vu(ϕ)
mit dem geraden Anteil vg und dem ungeraden Anteil vu und lost die beidendamit bezeichneten Probleme getrennt. Wegen der Linearitat ist p = pg + pu.
Die Unbekannten an werden aus der Schnellevorgabe V (ϕ) in r = b be-stimmt. Dazu wird einfach die aus dem Ansatz (5.31) folgende Schnelle
Vr(r, ϕ) =j
ω%0
∂p
∂r=
j
%0ck0
∂p
∂r=
j
%0c
∞∑n=0
anH(2)′n (k0r) cos(nϕ) (5.32)
(das Hochkomma bezeichnet die Ableitung der Hankelfunktion nach dem Ar-gument k0r) fur r = b mit der Vorgabe V (ϕ) in Ubereinstimmung gebracht:
Vr(b, ϕ) = V (ϕ), also∞∑n=0
anH(2)′n (k0b) cos(nϕ) = −j%0cV (ϕ) .
(5.33)
Gl. (5.33) kann nun wie folgt nach einer beliebig gewahlten Unbekannten am(irgendein fest gewahltes m) aufgelost werden:
Zunachst multipliziert man (5.33) mit cos(mϕ) und integriert danach uberϕ im Intervall −π bis π. Der Grund fur diese Operationskette ist rasch erklart:durch sie werden alle in (5.33) links stehenden Summanden gleich Null, mitAusnahme des Summanden mit n = m. In der Tat, die Operationskette fuhrtfur m 6= n auf die Integrale
π∫−π
cos(nϕ) cos(mϕ) dϕ =12
π∫−π
cos((n−m)ϕ)+cos((n−m)ϕ) dϕ = 0 . (5.34)
Nur fur n = m bleibt
π∫−π
cos2(mϕ) dϕ ={
π fur m 6= 02π fur m = 0 . (5.35)
Die Wirkung der genannten Operationskette besteht, wie gesagt, darin, (5.33)nach der Unbekannten am aufzulosen:
5.3 Ebene Probleme 85
fur m 6= 0 : am πH(2)′m (k0b) = −j%0c
π∫−π
V (ϕ) cos(mϕ) dϕ (5.36a)
fur m = 0 : a0 2πH(2)′
0 (k0b) = −j%0c
π∫−π
V (ϕ) dϕ . (5.36b)
Wenn man vom in (5.36b) genannten Fall m = 0 absieht, ist es naturlichvollig unerheblich, welches m in Gl. (5.36a) gewahlt worden ist: (5.36a) giltdemnach fur alle m > 0. Damit sind alle Koeffizienten am bekannt, das Pro-blem ist gelost. Es bleibt nur noch, das Resultat zu notieren. Wenn noch dieAbkurzungen
Vn =1εnπ
π∫−π
V (ϕ) cos(nϕ) dϕ (5.37a)
mit εn =
{1 n 6= 02 n = 0
(5.37b)
benutzt werden, so ist das Resultat
p(r, ϕ) = −j%0c∞∑n=0
VnH(2)n (k0r)
H(2)′n (k0b)
cos(nϕ) . (5.38)
Wenn (5.38) (oder eine ahnliche Gleichung) nummerisch ausgewertetwerden soll, dann ist eine Konvergenz-Betrachtung erforderlich: wie vieleSummandenN mussen denn ”mitgenommen“ werden, damit der Schalldruckhinreichend genau bekannt ist? Naturlich muss die fur numerische Auswer-tungen erforderliche Summation bei einem gewissen N abgebrochen werden,es kann stets und immer nur
pnum(r, ϕ) = −j%0cN∑n=0
VnH(2)n (k0r)
H(2)′n (k0b)
cos(nϕ) (5.39)
wirklich auch berechnet werden. Wie also muss N gewahlt werden, damitpnum ein ”guter“ Schatzwert fur das wahre p ist? Die Antwort darauf hangtinsbesondere vom Verhaltnis aus Aufpunkt Abstand r und Zylinderradius bab.
Punkte in der Nahe der Zylinder-Oberflache r ≈ b
Fur Abstande r ≈ b sind die Besselfunktionen H(2)n (k0r) und H(2′)
n (k0b) etwavon gleicher Großenordnung. Deshalb bestimmt hier das Verhalten von Vn dieKonvergenz. Fallen die Vn rasch uber n, dann genugen wenige Summanden

86 5 Randwertprobleme in Zylinderkoordinaten
und die Summe kann fruh abgebrochen werden. Wie auch im Abschnitt 1.4.1erklart, ist das der Fall fur stetige Funktionen V (ϕ). Fur unstetige FunktionenV (ϕ) dagegen nimmt die Folge Vn nur allmahlich mit n ab. Allgemein kannman also fur r ≈ b feststellen, dass das Verhalten von Vn die Konvergenzbestimmt und damit also der Funktionsverlauf der Quelle V (ϕ).
Punkte weit entfernt von der Zylinder-Oberflache r � b
Fur r � b bleiben die Zahler-Funktionen H(2)n (k0r) in (5.38) mit von n = 0
weg wachsender Ordnung n zunachst dem Betrage nach in der Großenordnungvon 1, solange dabei noch n < k0r erfullt bleibt; erst wenn die Ordnung nuber das Argument k0r hinaus wachsen wurde, werden diese Hankelfunktionendem Betrage nach groß. Die Nenner-Funktionen H(2)′
n (k0b) dagegen wachsenbei den viel kleineren Ordnungen n > k0b bereits an. Daraus folgt, dass dieSummanden von Gl. (5.38) rasch klein werden, wenn die Ordnungszahl nuber k0b hinaus anwachst. Die Summanden bleiben auch bei den noch hoherenOrdnungen n > k0r klein, obwohl die Zahle-Funktionen nun auch angewachsensind: Wegen
H(2)n (k0r)
H(2)′n (k0b)
∼(b
r
)nfur n > k0r bleiben die Summanden im hier diskutierten Fall r � b weiterhinsehr klein und umso kleiner, je großer r/b ist.
Insgesamt kann man also die Summation bei einer Ordnung N abbrechen,die ”etwas“ uber k0b liegt. Ein Vorschlag konnte z. B.
N = 2k0b (aufgerundet) (5.40)
sein. Wie eine genauere Betrachtung anhand der numerisch berechneten Sum-manden zeigt, ist damit schon ein sehr, sehr kleiner Fehler im berechnetenDruck hergestellt. Naturlich ist das nur ein Anhaltswert. Jeder, der solcheAuswertungen vornimmt, ist gut beraten, selbst Erfahrungen zu sammeln.Fest steht jedenfalls, dass die Konvergenz-Eigenschaften fur r � b durch dieGroße der Quelle in Wellenlangen, also durch b/λ0 bestimmt werden.
Die genannte Tatsache, dass hohe Ordnungen n � k0b (im Fall r � b)keinen Beitrag liefern, lasst sich auch anschaulich begrunden. Die Losungs-Bestandteile cos(nϕ) (und sin(nϕ)) lassen sich deuten als auf der Zylinder-oberflache vorhandene stehende Wellen entlang der Umfangsrichtung ϕ. IhreOrdnungszahl n beschreibt dabei einfach, wie viele Umfangswellenlangen λuauf dem Zylinderumfang 2πb vorkommen
n =2πbλu
,
oderλu =
2πbn
. (5.41)
5.3 Ebene Probleme 87
Nun mussen hier naturlich physikalisch sehr ahnliche Erscheinungen auftre-ten wie bei der Abstrahlung von Ebenen: kurze Strahlerwellenlange λu � λ0
(hohe Ordnungszahlen n) fuhren vor allem zu Nahfeldern, die in großen Ent-fernungen r kaum noch merklich sind; langwellige λu > λ0 hingegen besitzeneine ”echte“, weitreichende Abstrahlung. Diese Aussage ist vollig identisch mitdem Ergebnis der oben geschilderten Konvergenz-Betrachtung: Summandenmit - im Vergleich zur Luftschall-Wellenlange - kurzer Strahler-Wellenlange,also solche mit
λuλ0
=2πbnλ0
=k0b
n� 1
bzw. mit n� k0b brauchen nicht berucksichtigt zu werden.Im Unterschied zu den ebenen Strahlern gibt es bei den gekrummten, zylin-
drischen Strahler-Flachen jedoch keine scharfe Grenze hinsichtlich der strah-lenden und der nicht-strahlenden Wellenlangen λu: auch kurzwellige Strahlermit hoher Ordnungszahl tragen diesmal ”ein wenig“ zur Gesamt-Abstrahlungbei, und zwar um so weniger, je hoher die Ordnung n ist.
Es ist ublich (und sinnvoll), diese Tatsache noch einmal an Hand der ab-gestrahlten Leistung auch quantitativ zu beleuchten. Dazu wird zunachst dieRadialkomponente der Schallschnelle aus (5.38) zu
vr =j
ω%0
∂p
∂r=∞∑n=0
VnH(2)′n (k0r)
H(2)′n (k0b)
cos(nϕ) (5.42)
bestimmt. Mit der Intensitat
Ir =12
Re {p ·Vr∗} (5.43)
und der Schallleistung (pro Langeneinheit der z-Richtung)
P =
2π∫0
Ir r dϕ (5.44)
erhalt man
P =12
Re
−j%0c∞∑n=0
∞∑m=0
rVnV∗m
H(2)n (k0r)H
(2)′∗m (k0r)
H(2)′n (k0b)H
(2)′∗m (k0b)
π∫−π
cos(nϕ) cos(mϕ)dϕ
.
(5.45)Das Integral uber ϕ ist schon wohlbekannt: es ist nach Gl. 5.34 immer gleichNull, außer fur n = m. Fur n = m ist noch
π∫−π
cos2(nϕ) dϕ = εnπ ,
es bleibt also
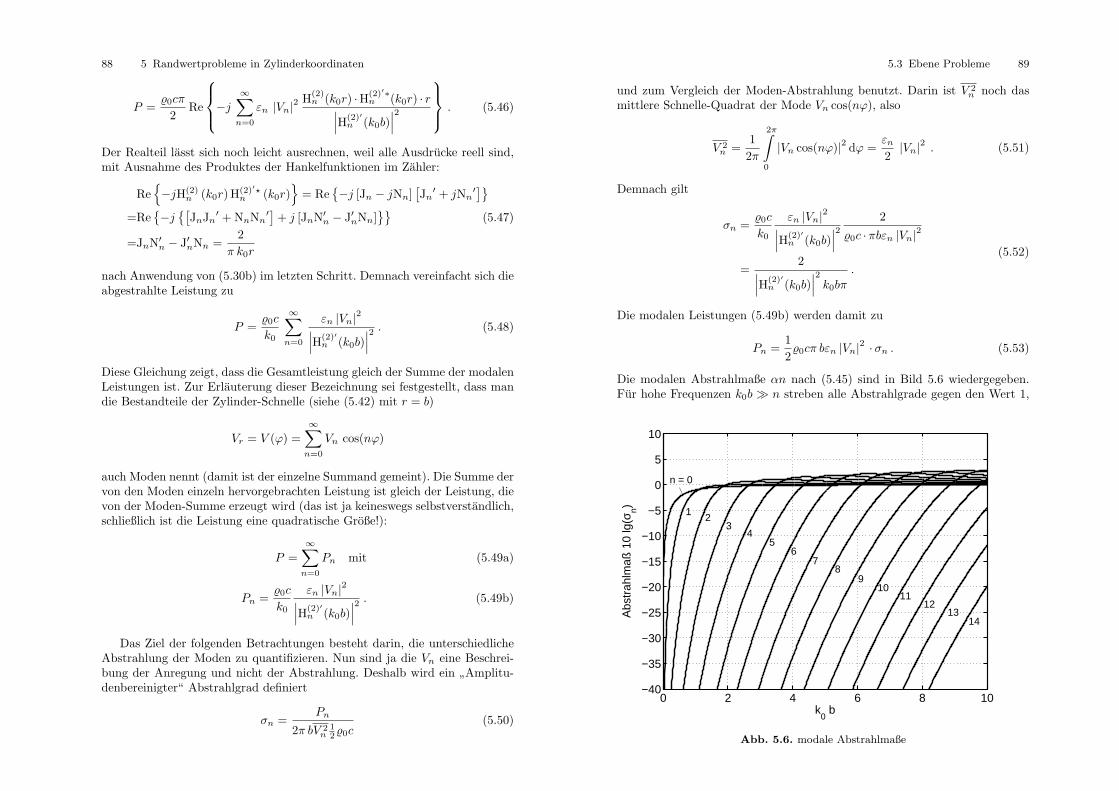
88 5 Randwertprobleme in Zylinderkoordinaten
P =%0cπ
2Re
−j∞∑n=0
εn |Vn|2 H(2)n (k0r) ·H(2)′∗
n (k0r) · r∣∣∣H(2)′n (k0b)
∣∣∣2 . (5.46)
Der Realteil lasst sich noch leicht ausrechnen, weil alle Ausdrucke reell sind,mit Ausnahme des Produktes der Hankelfunktionen im Zahler:
Re{−jH(2)
n (k0r) H(2)′?n (k0r)
}= Re
{−j [Jn − jNn][Jn′ + jNn
′]}=Re
{−j {[JnJn′ + NnNn′]+ j [JnN′n − J′nNn]
}}(5.47)
=JnN′n − J′nNn =2
π k0r
nach Anwendung von (5.30b) im letzten Schritt. Demnach vereinfacht sich dieabgestrahlte Leistung zu
P =%0c
k0
∞∑n=0
εn |Vn|2∣∣∣H(2)′n (k0b)
∣∣∣2 . (5.48)
Diese Gleichung zeigt, dass die Gesamtleistung gleich der Summe der modalenLeistungen ist. Zur Erlauterung dieser Bezeichnung sei festgestellt, dass mandie Bestandteile der Zylinder-Schnelle (siehe (5.42) mit r = b)
Vr = V (ϕ) =∞∑n=0
Vn cos(nϕ)
auch Moden nennt (damit ist der einzelne Summand gemeint). Die Summe dervon den Moden einzeln hervorgebrachten Leistung ist gleich der Leistung, dievon der Moden-Summe erzeugt wird (das ist ja keineswegs selbstverstandlich,schließlich ist die Leistung eine quadratische Große!):
P =∞∑n=0
Pn mit (5.49a)
Pn =%0c
k0
εn |Vn|2∣∣∣H(2)′n (k0b)
∣∣∣2 . (5.49b)
Das Ziel der folgenden Betrachtungen besteht darin, die unterschiedlicheAbstrahlung der Moden zu quantifizieren. Nun sind ja die Vn eine Beschrei-bung der Anregung und nicht der Abstrahlung. Deshalb wird ein ”Amplitu-denbereinigter“ Abstrahlgrad definiert
σn =Pn
2π bV 2n
12%0c
(5.50)
5.3 Ebene Probleme 89
und zum Vergleich der Moden-Abstrahlung benutzt. Darin ist V 2n noch das
mittlere Schnelle-Quadrat der Mode Vn cos(nϕ), also
V 2n =
12π
2π∫0
|Vn cos(nϕ)|2 dϕ =εn2|Vn|2 . (5.51)
Demnach gilt
σn =%0c
k0
εn |Vn|2∣∣∣H(2)′n (k0b)
∣∣∣22
%0c ·πbεn |Vn|2
=2∣∣∣H(2)′
n (k0b)∣∣∣2 k0bπ
.
(5.52)
Die modalen Leistungen (5.49b) werden damit zu
Pn =12%0cπ bεn |Vn|2 ·σn . (5.53)
Die modalen Abstrahlmaße αn nach (5.45) sind in Bild 5.6 wiedergegeben.Fur hohe Frequenzen k0b � n streben alle Abstrahlgrade gegen den Wert 1,
0 2 4 6 8 10−40
−35
−30
−25
−20
−15
−10
−5
0
5
10
k0 b
Abs
trah
lmaß
10
lg(σ
n)
n = 0
12
34
56
78
910
1112
1314
Abb. 5.6. modale Abstrahlmaße
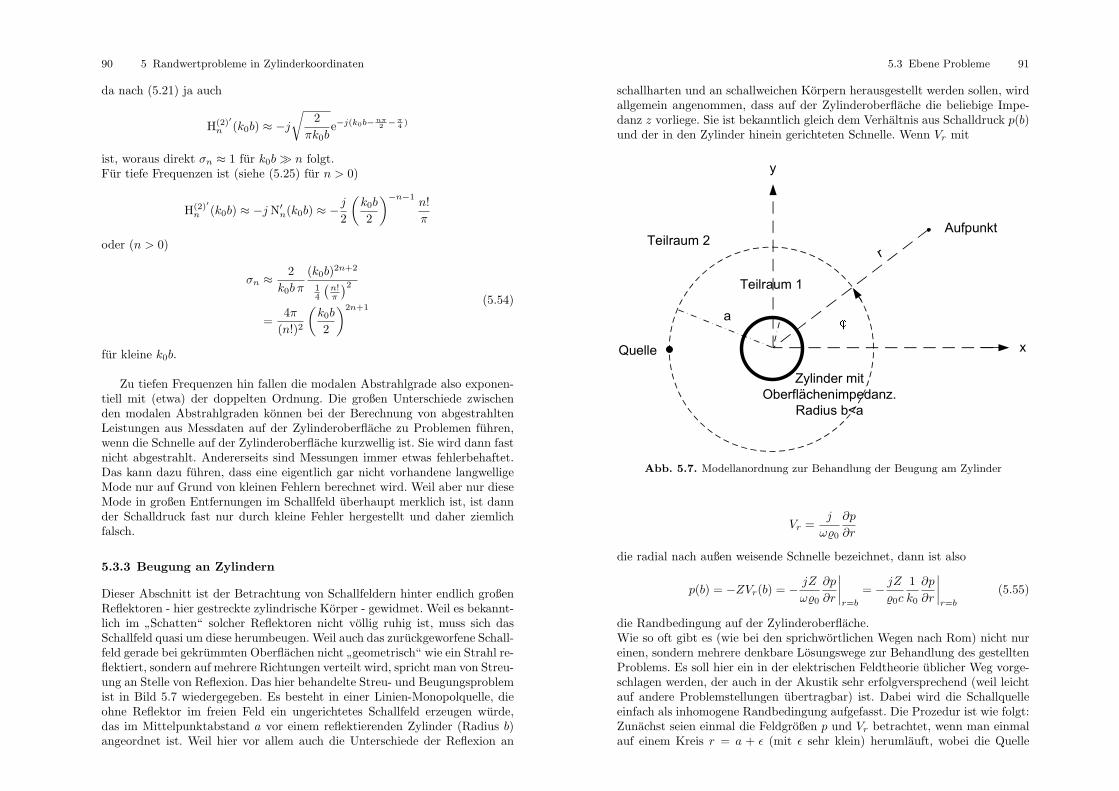
90 5 Randwertprobleme in Zylinderkoordinaten
da nach (5.21) ja auch
H(2)′n (k0b) ≈ −j
√2
πk0be−j(k0b−
nπ2 −π4 )
ist, woraus direkt σn ≈ 1 fur k0b� n folgt.Fur tiefe Frequenzen ist (siehe (5.25) fur n > 0)
H(2)′n (k0b) ≈ −jN′n(k0b) ≈ − j2
(k0b
2
)−n−1n!π
oder (n > 0)
σn ≈ 2k0b π
(k0b)2n+2
14
(n!π
)2=
4π(n!)2
(k0b
2
)2n+1(5.54)
fur kleine k0b.
Zu tiefen Frequenzen hin fallen die modalen Abstrahlgrade also exponen-tiell mit (etwa) der doppelten Ordnung. Die großen Unterschiede zwischenden modalen Abstrahlgraden konnen bei der Berechnung von abgestrahltenLeistungen aus Messdaten auf der Zylinderoberflache zu Problemen fuhren,wenn die Schnelle auf der Zylinderoberflache kurzwellig ist. Sie wird dann fastnicht abgestrahlt. Andererseits sind Messungen immer etwas fehlerbehaftet.Das kann dazu fuhren, dass eine eigentlich gar nicht vorhandene langwelligeMode nur auf Grund von kleinen Fehlern berechnet wird. Weil aber nur dieseMode in großen Entfernungen im Schallfeld uberhaupt merklich ist, ist dannder Schalldruck fast nur durch kleine Fehler hergestellt und daher ziemlichfalsch.
5.3.3 Beugung an Zylindern
Dieser Abschnitt ist der Betrachtung von Schallfeldern hinter endlich großenReflektoren - hier gestreckte zylindrische Korper - gewidmet. Weil es bekannt-lich im ”Schatten“ solcher Reflektoren nicht vollig ruhig ist, muss sich dasSchallfeld quasi um diese herumbeugen. Weil auch das zuruckgeworfene Schall-feld gerade bei gekrummten Oberflachen nicht ”geometrisch“ wie ein Strahl re-flektiert, sondern auf mehrere Richtungen verteilt wird, spricht man von Streu-ung an Stelle von Reflexion. Das hier behandelte Streu- und Beugungsproblemist in Bild 5.7 wiedergegeben. Es besteht in einer Linien-Monopolquelle, dieohne Reflektor im freien Feld ein ungerichtetes Schallfeld erzeugen wurde,das im Mittelpunktabstand a vor einem reflektierenden Zylinder (Radius b)angeordnet ist. Weil hier vor allem auch die Unterschiede der Reflexion an
5.3 Ebene Probleme 91
schallharten und an schallweichen Korpern herausgestellt werden sollen, wirdallgemein angenommen, dass auf der Zylinderoberflache die beliebige Impe-danz z vorliege. Sie ist bekanntlich gleich dem Verhaltnis aus Schalldruck p(b)und der in den Zylinder hinein gerichteten Schnelle. Wenn Vr mit
Abb. 5.7. Modellanordnung zur Behandlung der Beugung am Zylinder
Vr =j
ω%0
∂p
∂r
die radial nach außen weisende Schnelle bezeichnet, dann ist also
p(b) = −ZVr(b) = − jZ
ω%0
∂p
∂r
∣∣∣∣r=b
= − jZ%0c
1k0
∂p
∂r
∣∣∣∣r=b
(5.55)
die Randbedingung auf der Zylinderoberflache.Wie so oft gibt es (wie bei den sprichwortlichen Wegen nach Rom) nicht nureinen, sondern mehrere denkbare Losungswege zur Behandlung des gestelltenProblems. Es soll hier ein in der elektrischen Feldtheorie ublicher Weg vorge-schlagen werden, der auch in der Akustik sehr erfolgversprechend (weil leichtauf andere Problemstellungen ubertragbar) ist. Dabei wird die Schallquelleeinfach als inhomogene Randbedingung aufgefasst. Die Prozedur ist wie folgt:Zunachst seien einmal die Feldgroßen p und Vr betrachtet, wenn man einmalauf einem Kreis r = a + ε (mit ε sehr klein) herumlauft, wobei die Quelle
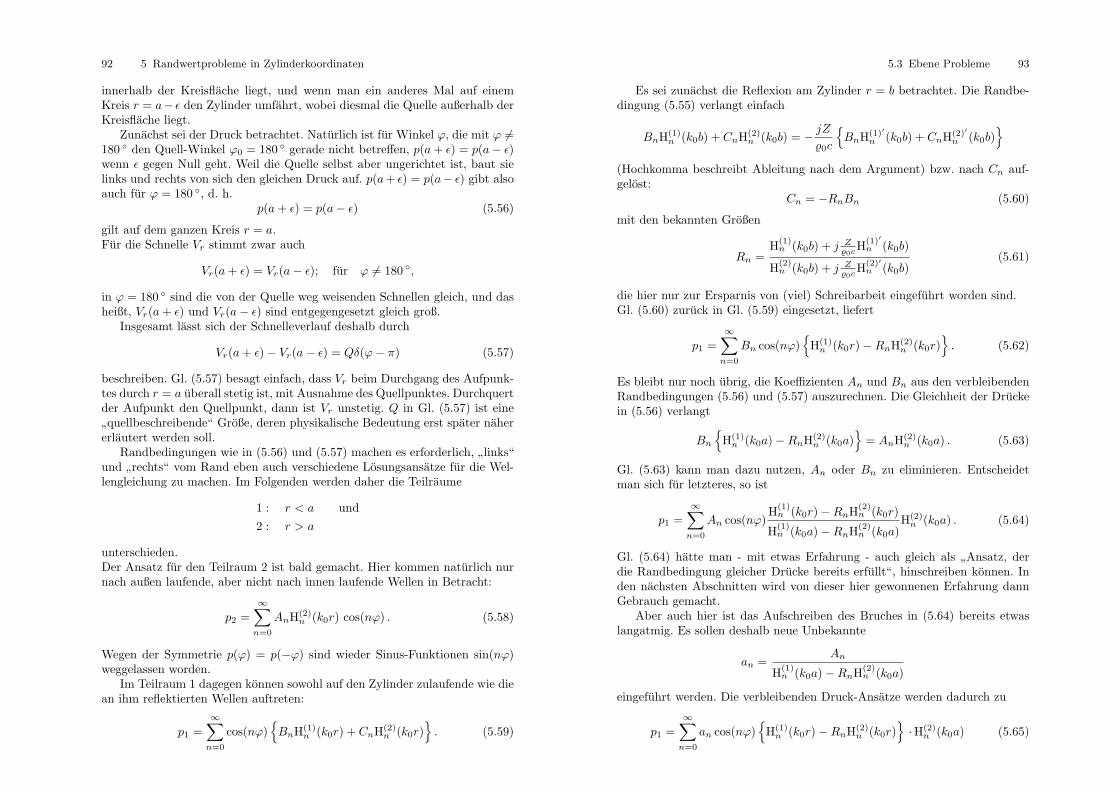
92 5 Randwertprobleme in Zylinderkoordinaten
innerhalb der Kreisflache liegt, und wenn man ein anderes Mal auf einemKreis r = a− ε den Zylinder umfahrt, wobei diesmal die Quelle außerhalb derKreisflache liegt.
Zunachst sei der Druck betrachtet. Naturlich ist fur Winkel ϕ, die mit ϕ 6=180 ◦ den Quell-Winkel ϕ0 = 180 ◦ gerade nicht betreffen, p(a+ ε) = p(a− ε)wenn ε gegen Null geht. Weil die Quelle selbst aber ungerichtet ist, baut sielinks und rechts von sich den gleichen Druck auf. p(a+ ε) = p(a− ε) gibt alsoauch fur ϕ = 180 ◦, d. h.
p(a+ ε) = p(a− ε) (5.56)
gilt auf dem ganzen Kreis r = a.Fur die Schnelle Vr stimmt zwar auch
Vr(a+ ε) = Vr(a− ε); fur ϕ 6= 180 ◦,
in ϕ = 180 ◦ sind die von der Quelle weg weisenden Schnellen gleich, und dasheißt, Vr(a+ ε) und Vr(a− ε) sind entgegengesetzt gleich groß.
Insgesamt lasst sich der Schnelleverlauf deshalb durch
Vr(a+ ε)− Vr(a− ε) = Qδ(ϕ− π) (5.57)
beschreiben. Gl. (5.57) besagt einfach, dass Vr beim Durchgang des Aufpunk-tes durch r = a uberall stetig ist, mit Ausnahme des Quellpunktes. Durchquertder Aufpunkt den Quellpunkt, dann ist Vr unstetig. Q in Gl. (5.57) ist eine
”quellbeschreibende“ Große, deren physikalische Bedeutung erst spater nahererlautert werden soll.
Randbedingungen wie in (5.56) und (5.57) machen es erforderlich, ”links“und ”rechts“ vom Rand eben auch verschiedene Losungsansatze fur die Wel-lengleichung zu machen. Im Folgenden werden daher die Teilraume
1 : r < a und2 : r > a
unterschieden.Der Ansatz fur den Teilraum 2 ist bald gemacht. Hier kommen naturlich nurnach außen laufende, aber nicht nach innen laufende Wellen in Betracht:
p2 =∞∑n=0
AnH(2)n (k0r) cos(nϕ) . (5.58)
Wegen der Symmetrie p(ϕ) = p(−ϕ) sind wieder Sinus-Funktionen sin(nϕ)weggelassen worden.
Im Teilraum 1 dagegen konnen sowohl auf den Zylinder zulaufende wie diean ihm reflektierten Wellen auftreten:
p1 =∞∑n=0
cos(nϕ){BnH(1)
n (k0r) + CnH(2)n (k0r)
}. (5.59)
5.3 Ebene Probleme 93
Es sei zunachst die Reflexion am Zylinder r = b betrachtet. Die Randbe-dingung (5.55) verlangt einfach
BnH(1)n (k0b) + CnH(2)
n (k0b) = − jZ%0c
{BnH(1)′
n (k0b) + CnH(2)′n (k0b)
}(Hochkomma beschreibt Ableitung nach dem Argument) bzw. nach Cn auf-gelost:
Cn = −RnBn (5.60)
mit den bekannten Großen
Rn =H(1)n (k0b) + j Z
%0cH(1)′n (k0b)
H(2)n (k0b) + j Z
%0cH(2)′n (k0b)
(5.61)
die hier nur zur Ersparnis von (viel) Schreibarbeit eingefuhrt worden sind.Gl. (5.60) zuruck in Gl. (5.59) eingesetzt, liefert
p1 =∞∑n=0
Bn cos(nϕ){
H(1)n (k0r)−RnH(2)
n (k0r)}. (5.62)
Es bleibt nur noch ubrig, die Koeffizienten An und Bn aus den verbleibendenRandbedingungen (5.56) und (5.57) auszurechnen. Die Gleichheit der Druckein (5.56) verlangt
Bn
{H(1)n (k0a)−RnH(2)
n (k0a)}
= AnH(2)n (k0a) . (5.63)
Gl. (5.63) kann man dazu nutzen, An oder Bn zu eliminieren. Entscheidetman sich fur letzteres, so ist
p1 =∞∑n=0
An cos(nϕ)H(1)n (k0r)−RnH(2)
n (k0r)
H(1)n (k0a)−RnH(2)
n (k0a)H(2)n (k0a) . (5.64)
Gl. (5.64) hatte man - mit etwas Erfahrung - auch gleich als ”Ansatz, derdie Randbedingung gleicher Drucke bereits erfullt“, hinschreiben konnen. Inden nachsten Abschnitten wird von dieser hier gewonnenen Erfahrung dannGebrauch gemacht.
Aber auch hier ist das Aufschreiben des Bruches in (5.64) bereits etwaslangatmig. Es sollen deshalb neue Unbekannte
an =An
H(1)n (k0a)−RnH(2)
n (k0a)
eingefuhrt werden. Die verbleibenden Druck-Ansatze werden dadurch zu
p1 =∞∑n=0
an cos(nϕ){
H(1)n (k0r)−RnH(2)
n (k0r)}·H(2)
n (k0a) (5.65)

94 5 Randwertprobleme in Zylinderkoordinaten
und
p2 =∞∑n=0
an cos(nϕ){
H(1)n (k0a)−RnH(2)
n (k0a)}·H(2)
n (k0r) . (5.66)
Jetzt mussen noch die Koeffizienten an aus der inhomogenen Randbedingung(5.57) bestimmt werden. Dazu berechnet man zunachst die aus den Duck-Ansatzen (5.65) und (5.66) folgende Schnelle-Differenz:
V2(a)− V1(a) =j
ω%0
∂(p2 − p1)∂r
∣∣∣∣r=a
=j
%0c
∞∑n=0
an cos(nϕ){[
H(1)n (k0a)−RnH(2)
n (k0a)]·H(2)′
n (k0a)}
−[H(1)′n (k0a)−RnH(2)′
n (k0a)]·H(2)
n (k0a) . (5.67)
Die geschweifte Klammer kann ganz erheblich vereinfacht werden, z. B. fallendie Ausdrucke mit Rn weg. Lasst man das Aufschreiben des Arguments zurErsparnis von Schreibarbeit weg, so ist
{. . .} = H(1)n ·H(2)′
n −H(1)′n ·H(2)
n
= [Jn + jNn] · [Jn′ − jNn′]− [Jn′ + jNn
′] [Jn − jNn]
= j[NnJn′ − JnNn
′]+ j[NnJn′ − JnNn
′]= −2j
[JnNn
′ − Jn′Nn
]= −2j
2π k0a
= − 4jπ k0a
(5.68)
(wegen (5.30b)). Es bleibt also nur
V2(a)− V1(a) =4
%0cπk0a
∞∑n=0
an cos(nϕ) (5.69)
ubrig, in der Tat eine recht betrachtliche Vereinfachung.Nach (5.57) bleibt noch
∞∑n=0
an cos(nϕ) =%0cπk0a
4Qδ(ϕ− π) = Q′δ(ϕ− π) (5.70)
(wieder ist mit Q′ nur eine Schreibvereinfachung bezeichnet). Wie schon imvorigen Abschnitt geschildert ist das Auflosen von (5.70) nach einer beliebigenUnbekannten am ganz leicht (siehe die Gleichungen (5.35) bis (5.37)): manmultipliziert mit cos(mϕ) und integriert und erhalt so
∞∑n=0
an cos(nϕ) =%0cπ k0a
4Qδ(ϕ− π) = Q′δ(ϕ− π) = Q′ cos(mπ)
5.3 Ebene Probleme 95
oder
am =Q′(−1)m
εmπ(5.71)
mit
εm =
{1 m 6= 02 m = 0 .
(5.72)
Die so bestimmten Koeffizienten in Gln. (5.65) und (5.66) eingesetzt, ergibt
p1 =Q′
π
∞∑n=0
(−1)n
εncos(nϕ)
{H(1)n (k0r)−RnH(2)
n (k0r)}·H(2)
n (k0a) (5.73)
p2 =Q′
π
∞∑n=0
(−1)n
εncos(nϕ)
{H(1)n (k0a)−RnH(2)
n (k0a)}·H(2)
n (k0r) , (5.74)
womit das Randwertproblem gelost ist. Es bleibt allerdings noch, die physi-kalische Bedeutung von Q′ zu ergrunden. Dazu lasst man den Reflektor weg(b → 0) und betrachtet den Druck, der sich im Punkt 0 einstellt: das istdann gleich dem Druck pQ(0), den die Quelle im Ursprung ohne Reflektorhinterlasst. Wie man Gl. (5.61) entnimmt, ist (z. B. fur z →∞)
Rn =H(1)′n (k0b)
H(2)′n (k0b)
≈ jNn′(k0b)
−jNn′(k0b)
= −1
fur b → 0, und naturlich muss Rn von z unabhangig sein, wenn b → 0 ist.Also gilt nach (5.73)
p1 =Q′
π
∞∑n=0
2(−1)n
εnJn(k0r) ·H(2)
n (k0a) · cos(nϕ) (5.75)
und
pQ(0) = p1(0) =Q′
πH(2)
0 (k0a) ,
weil Jn(0) = 0 fur n > 0 und J0(0) = 1. Es ist also
Q′
π=
pQ(0)
H(2)0 (k0a)
,
wobei – wie gesagt – pQ(0) den Druck beschreibt, den die Quelle im Abstand avon ihrem Mittelpunkt im ungestorten Fall ohne Reflektor hervorruft. Drucktman Q′ in Gln. (5.73) und (5.74) noch durch pQ(0) aus, so erhalt man
p1 = pQ(0)∞∑n=0
(−1)n
εncos(nϕ)
H(2)n (k0a)
H(2)0 (k0a)
{H(1)n (k0r)−RnH(2)
n (k0r)}
(5.76)
und
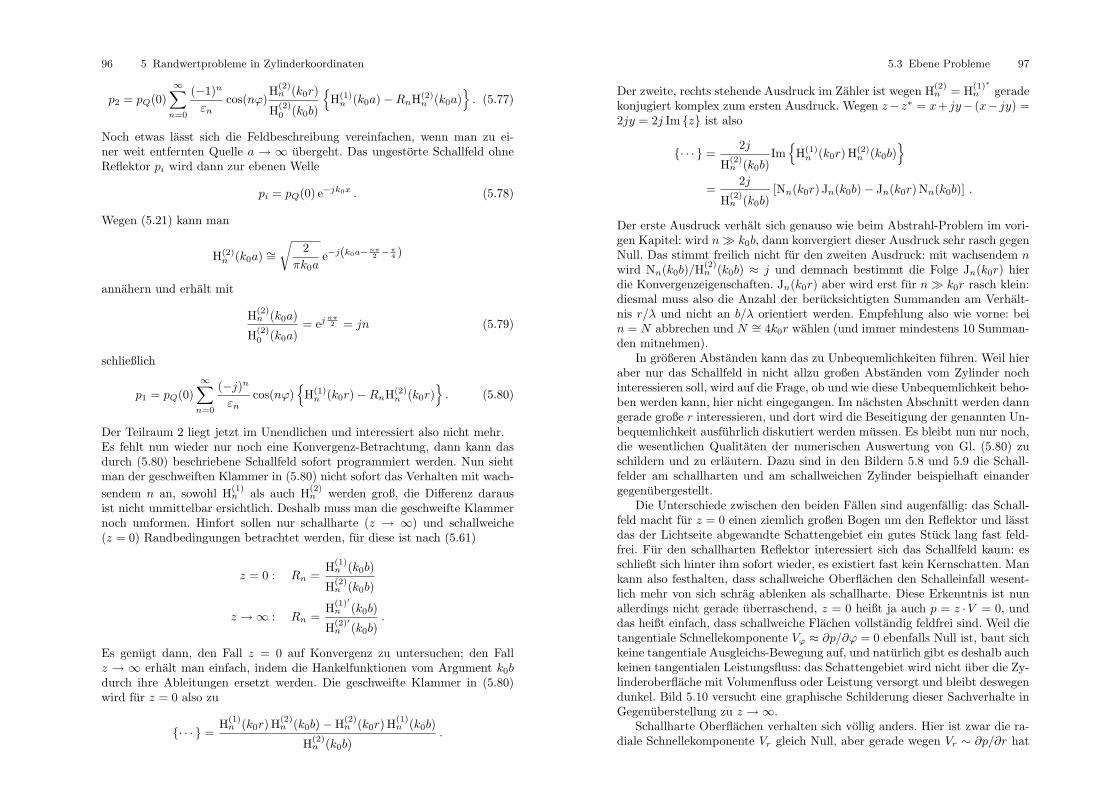
96 5 Randwertprobleme in Zylinderkoordinaten
p2 = pQ(0)∞∑n=0
(−1)n
εncos(nϕ)
H(2)n (k0r)
H(2)0 (k0b)
{H(1)n (k0a)−RnH(2)
n (k0a)}. (5.77)
Noch etwas lasst sich die Feldbeschreibung vereinfachen, wenn man zu ei-ner weit entfernten Quelle a → ∞ ubergeht. Das ungestorte Schallfeld ohneReflektor pi wird dann zur ebenen Welle
pi = pQ(0) e−jk0x . (5.78)
Wegen (5.21) kann man
H(2)n (k0a) ∼=
√2
πk0ae−j(k0a−
nπ2 −π4 )
annahern und erhalt mit
H(2)n (k0a)
H(2)0 (k0a)
= ejnπ2 = jn (5.79)
schließlich
p1 = pQ(0)∞∑n=0
(−j)nεn
cos(nϕ){
H(1)n (k0r)−RnH(2)
n (k0r)}. (5.80)
Der Teilraum 2 liegt jetzt im Unendlichen und interessiert also nicht mehr.Es fehlt nun wieder nur noch eine Konvergenz-Betrachtung, dann kann dasdurch (5.80) beschriebene Schallfeld sofort programmiert werden. Nun siehtman der geschweiften Klammer in (5.80) nicht sofort das Verhalten mit wach-sendem n an, sowohl H(1)
n als auch H(2)n werden groß, die Differenz daraus
ist nicht unmittelbar ersichtlich. Deshalb muss man die geschweifte Klammernoch umformen. Hinfort sollen nur schallharte (z → ∞) und schallweiche(z = 0) Randbedingungen betrachtet werden, fur diese ist nach (5.61)
z = 0 : Rn =H(1)n (k0b)
H(2)n (k0b)
z →∞ : Rn =H(1)′n (k0b)
H(2)′n (k0b)
.
Es genugt dann, den Fall z = 0 auf Konvergenz zu untersuchen; den Fallz → ∞ erhalt man einfach, indem die Hankelfunktionen vom Argument k0bdurch ihre Ableitungen ersetzt werden. Die geschweifte Klammer in (5.80)wird fur z = 0 also zu
{· · · } =H(1)n (k0r) H(2)
n (k0b)−H(2)n (k0r) H(1)
n (k0b)
H(2)n (k0b)
.
5.3 Ebene Probleme 97
Der zweite, rechts stehende Ausdruck im Zahler ist wegen H(2)n = H(1)∗
n geradekonjugiert komplex zum ersten Ausdruck. Wegen z− z∗ = x+ jy− (x− jy) =2jy = 2j Im {z} ist also
{· · · } =2j
H(2)n (k0b)
Im{
H(1)n (k0r) H(2)
n (k0b)}
=2j
H(2)n (k0b)
[Nn(k0r) Jn(k0b)− Jn(k0r) Nn(k0b)] .
Der erste Ausdruck verhalt sich genauso wie beim Abstrahl-Problem im vori-gen Kapitel: wird n� k0b, dann konvergiert dieser Ausdruck sehr rasch gegenNull. Das stimmt freilich nicht fur den zweiten Ausdruck: mit wachsendem nwird Nn(k0b)/H
(2)n (k0b) ≈ j und demnach bestimmt die Folge Jn(k0r) hier
die Konvergenzeigenschaften. Jn(k0r) aber wird erst fur n� k0r rasch klein:diesmal muss also die Anzahl der berucksichtigten Summanden am Verhalt-nis r/λ und nicht an b/λ orientiert werden. Empfehlung also wie vorne: bein = N abbrechen und N ∼= 4k0r wahlen (und immer mindestens 10 Summan-den mitnehmen).
In großeren Abstanden kann das zu Unbequemlichkeiten fuhren. Weil hieraber nur das Schallfeld in nicht allzu großen Abstanden vom Zylinder nochinteressieren soll, wird auf die Frage, ob und wie diese Unbequemlichkeit beho-ben werden kann, hier nicht eingegangen. Im nachsten Abschnitt werden danngerade große r interessieren, und dort wird die Beseitigung der genannten Un-bequemlichkeit ausfuhrlich diskutiert werden mussen. Es bleibt nun nur noch,die wesentlichen Qualitaten der numerischen Auswertung von Gl. (5.80) zuschildern und zu erlautern. Dazu sind in den Bildern 5.8 und 5.9 die Schall-felder am schallharten und am schallweichen Zylinder beispielhaft einandergegenubergestellt.
Die Unterschiede zwischen den beiden Fallen sind augenfallig: das Schall-feld macht fur z = 0 einen ziemlich großen Bogen um den Reflektor und lasstdas der Lichtseite abgewandte Schattengebiet ein gutes Stuck lang fast feld-frei. Fur den schallharten Reflektor interessiert sich das Schallfeld kaum: esschließt sich hinter ihm sofort wieder, es existiert fast kein Kernschatten. Mankann also festhalten, dass schallweiche Oberflachen den Schalleinfall wesent-lich mehr von sich schrag ablenken als schallharte. Diese Erkenntnis ist nunallerdings nicht gerade uberraschend, z = 0 heißt ja auch p = z ·V = 0, unddas heißt einfach, dass schallweiche Flachen vollstandig feldfrei sind. Weil dietangentiale Schnellekomponente Vϕ ≈ ∂p/∂ϕ = 0 ebenfalls Null ist, baut sichkeine tangentiale Ausgleichs-Bewegung auf, und naturlich gibt es deshalb auchkeinen tangentialen Leistungsfluss: das Schattengebiet wird nicht uber die Zy-linderoberflache mit Volumenfluss oder Leistung versorgt und bleibt deswegendunkel. Bild 5.10 versucht eine graphische Schilderung dieser Sachverhalte inGegenuberstellung zu z →∞.
Schallharte Oberflachen verhalten sich vollig anders. Hier ist zwar die ra-diale Schnellekomponente Vr gleich Null, aber gerade wegen Vr ∼ ∂p/∂r hat
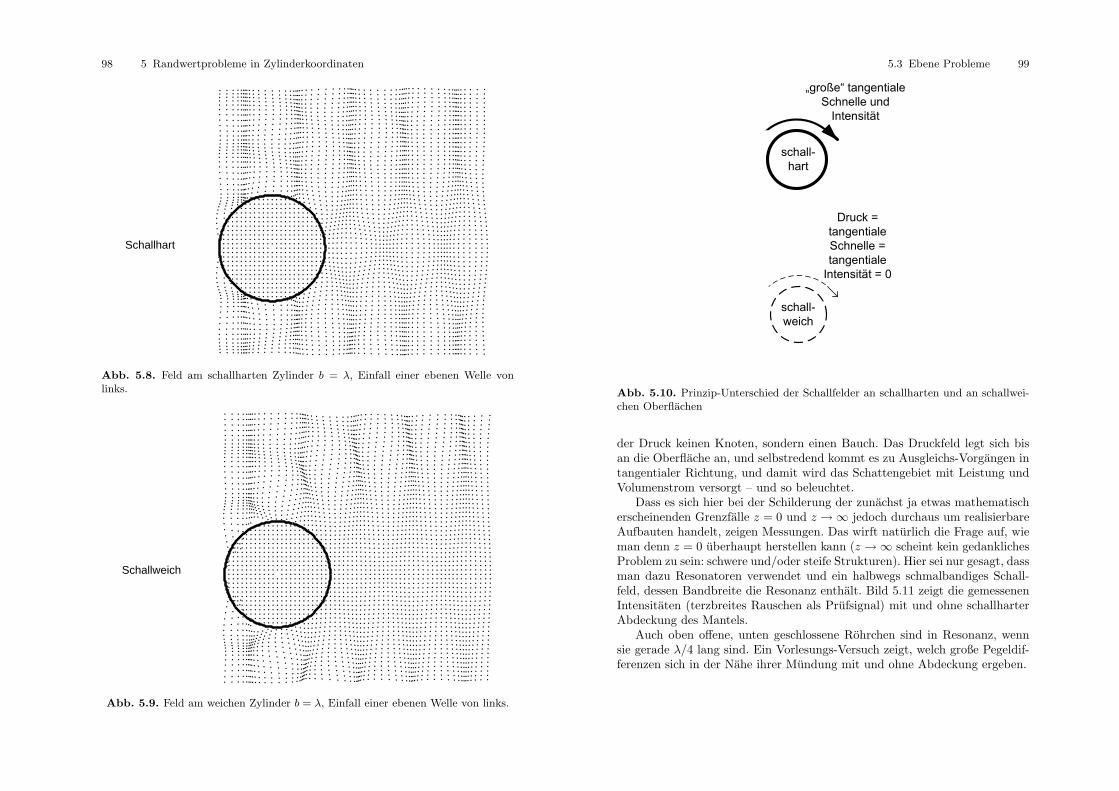
98 5 Randwertprobleme in Zylinderkoordinaten
Schallhart
Abb. 5.8. Feld am schallharten Zylinder b = λ, Einfall einer ebenen Welle vonlinks.
Schallweich
Abb. 5.9. Feld am weichen Zylinder b = λ, Einfall einer ebenen Welle von links.
5.3 Ebene Probleme 99
Abb. 5.10. Prinzip-Unterschied der Schallfelder an schallharten und an schallwei-chen Oberflachen
der Druck keinen Knoten, sondern einen Bauch. Das Druckfeld legt sich bisan die Oberflache an, und selbstredend kommt es zu Ausgleichs-Vorgangen intangentialer Richtung, und damit wird das Schattengebiet mit Leistung undVolumenstrom versorgt – und so beleuchtet.
Dass es sich hier bei der Schilderung der zunachst ja etwas mathematischerscheinenden Grenzfalle z = 0 und z →∞ jedoch durchaus um realisierbareAufbauten handelt, zeigen Messungen. Das wirft naturlich die Frage auf, wieman denn z = 0 uberhaupt herstellen kann (z →∞ scheint kein gedanklichesProblem zu sein: schwere und/oder steife Strukturen). Hier sei nur gesagt, dassman dazu Resonatoren verwendet und ein halbwegs schmalbandiges Schall-feld, dessen Bandbreite die Resonanz enthalt. Bild 5.11 zeigt die gemessenenIntensitaten (terzbreites Rauschen als Prufsignal) mit und ohne schallharterAbdeckung des Mantels.
Auch oben offene, unten geschlossene Rohrchen sind in Resonanz, wennsie gerade λ/4 lang sind. Ein Vorlesungs-Versuch zeigt, welch große Pegeldif-ferenzen sich in der Nahe ihrer Mundung mit und ohne Abdeckung ergeben.
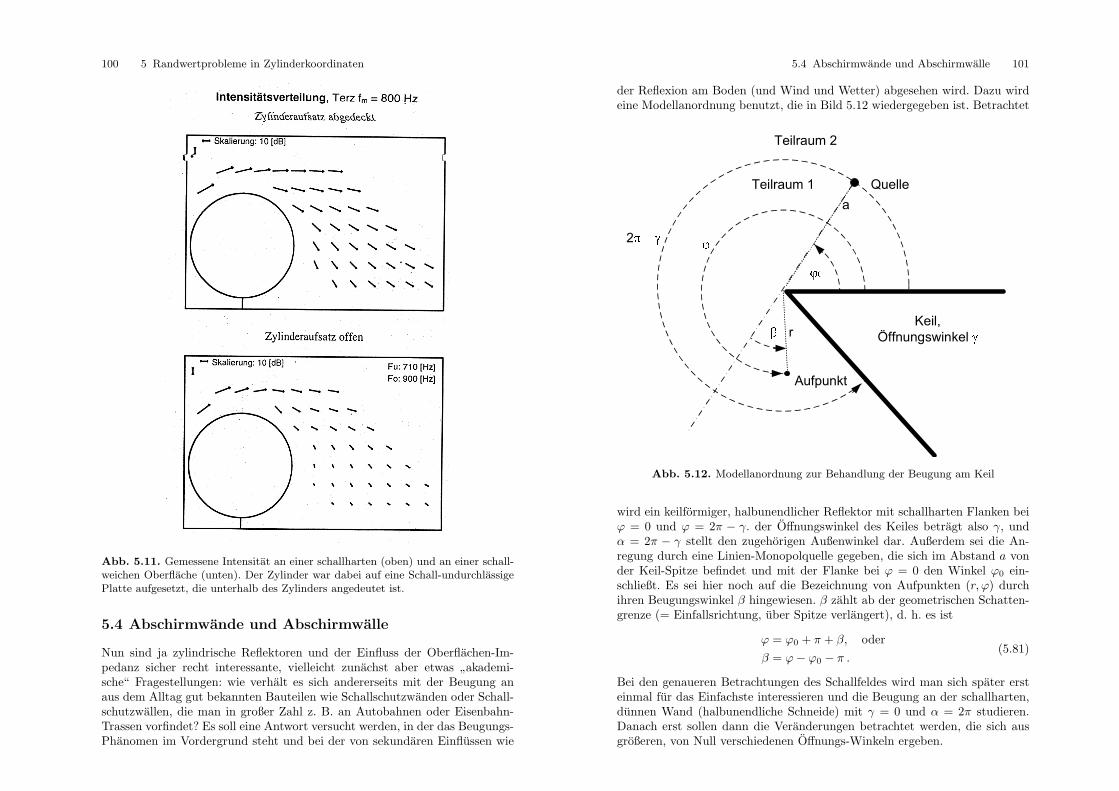
100 5 Randwertprobleme in Zylinderkoordinaten
Abb. 5.11. Gemessene Intensitat an einer schallharten (oben) und an einer schall-weichen Oberflache (unten). Der Zylinder war dabei auf eine Schall-undurchlassigePlatte aufgesetzt, die unterhalb des Zylinders angedeutet ist.
5.4 Abschirmwande und Abschirmwalle
Nun sind ja zylindrische Reflektoren und der Einfluss der Oberflachen-Im-pedanz sicher recht interessante, vielleicht zunachst aber etwas ”akademi-sche“ Fragestellungen: wie verhalt es sich andererseits mit der Beugung anaus dem Alltag gut bekannten Bauteilen wie Schallschutzwanden oder Schall-schutzwallen, die man in großer Zahl z. B. an Autobahnen oder Eisenbahn-Trassen vorfindet? Es soll eine Antwort versucht werden, in der das Beugungs-Phanomen im Vordergrund steht und bei der von sekundaren Einflussen wie
5.4 Abschirmwande und Abschirmwalle 101
der Reflexion am Boden (und Wind und Wetter) abgesehen wird. Dazu wirdeine Modellanordnung benutzt, die in Bild 5.12 wiedergegeben ist. Betrachtet
Abb. 5.12. Modellanordnung zur Behandlung der Beugung am Keil
wird ein keilformiger, halbunendlicher Reflektor mit schallharten Flanken beiϕ = 0 und ϕ = 2π − γ. der Offnungswinkel des Keiles betragt also γ, undα = 2π − γ stellt den zugehorigen Außenwinkel dar. Außerdem sei die An-regung durch eine Linien-Monopolquelle gegeben, die sich im Abstand a vonder Keil-Spitze befindet und mit der Flanke bei ϕ = 0 den Winkel ϕ0 ein-schließt. Es sei hier noch auf die Bezeichnung von Aufpunkten (r, ϕ) durchihren Beugungswinkel β hingewiesen. β zahlt ab der geometrischen Schatten-grenze (= Einfallsrichtung, uber Spitze verlangert), d. h. es ist
ϕ = ϕ0 + π + β, oderβ = ϕ− ϕ0 − π .
(5.81)
Bei den genaueren Betrachtungen des Schallfeldes wird man sich spater ersteinmal fur das Einfachste interessieren und die Beugung an der schallharten,dunnen Wand (halbunendliche Schneide) mit γ = 0 und α = 2π studieren.Danach erst sollen dann die Veranderungen betrachtet werden, die sich ausgroßeren, von Null verschiedenen Offnungs-Winkeln ergeben.
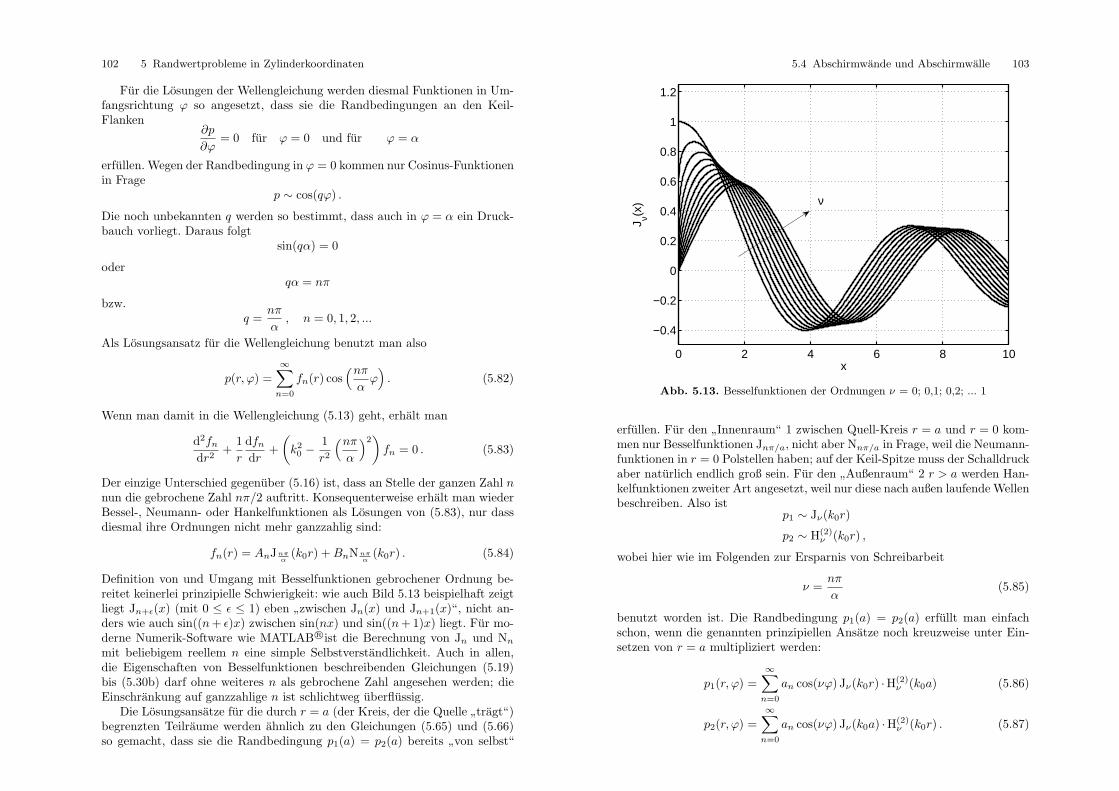
102 5 Randwertprobleme in Zylinderkoordinaten
Fur die Losungen der Wellengleichung werden diesmal Funktionen in Um-fangsrichtung ϕ so angesetzt, dass sie die Randbedingungen an den Keil-Flanken
∂p
∂ϕ= 0 fur ϕ = 0 und fur ϕ = α
erfullen. Wegen der Randbedingung in ϕ = 0 kommen nur Cosinus-Funktionenin Frage
p ∼ cos(qϕ) .
Die noch unbekannten q werden so bestimmt, dass auch in ϕ = α ein Druck-bauch vorliegt. Daraus folgt
sin(qα) = 0
oderqα = nπ
bzw.q =
nπ
α, n = 0, 1, 2, ...
Als Losungsansatz fur die Wellengleichung benutzt man also
p(r, ϕ) =∞∑n=0
fn(r) cos(nπαϕ). (5.82)
Wenn man damit in die Wellengleichung (5.13) geht, erhalt man
d2fndr2
+1r
dfndr
+(k2
0 −1r2
(nπα
)2)fn = 0 . (5.83)
Der einzige Unterschied gegenuber (5.16) ist, dass an Stelle der ganzen Zahl nnun die gebrochene Zahl nπ/2 auftritt. Konsequenterweise erhalt man wiederBessel-, Neumann- oder Hankelfunktionen als Losungen von (5.83), nur dassdiesmal ihre Ordnungen nicht mehr ganzzahlig sind:
fn(r) = AnJnπα
(k0r) +BnNnπα
(k0r) . (5.84)
Definition von und Umgang mit Besselfunktionen gebrochener Ordnung be-reitet keinerlei prinzipielle Schwierigkeit: wie auch Bild 5.13 beispielhaft zeigtliegt Jn+ε(x) (mit 0 ≤ ε ≤ 1) eben ”zwischen Jn(x) und Jn+1(x)“, nicht an-ders wie auch sin((n+ ε)x) zwischen sin(nx) und sin((n+ 1)x) liegt. Fur mo-derne Numerik-Software wie MATLAB R©ist die Berechnung von Jn und Nn
mit beliebigem reellem n eine simple Selbstverstandlichkeit. Auch in allen,die Eigenschaften von Besselfunktionen beschreibenden Gleichungen (5.19)bis (5.30b) darf ohne weiteres n als gebrochene Zahl angesehen werden; dieEinschrankung auf ganzzahlige n ist schlichtweg uberflussig.
Die Losungsansatze fur die durch r = a (der Kreis, der die Quelle ”tragt“)begrenzten Teilraume werden ahnlich zu den Gleichungen (5.65) und (5.66)so gemacht, dass sie die Randbedingung p1(a) = p2(a) bereits ”von selbst“
5.4 Abschirmwande und Abschirmwalle 103
0 2 4 6 8 10
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
x
J ν(x) ν
Abb. 5.13. Besselfunktionen der Ordnungen ν = 0; 0,1; 0,2; ... 1
erfullen. Fur den ”Innenraum“ 1 zwischen Quell-Kreis r = a und r = 0 kom-men nur Besselfunktionen Jnπ/a, nicht aber Nnπ/a in Frage, weil die Neumann-funktionen in r = 0 Polstellen haben; auf der Keil-Spitze muss der Schalldruckaber naturlich endlich groß sein. Fur den ”Außenraum“ 2 r > a werden Han-kelfunktionen zweiter Art angesetzt, weil nur diese nach außen laufende Wellenbeschreiben. Also ist
p1 ∼ Jν(k0r)
p2 ∼ H(2)ν (k0r) ,
wobei hier wie im Folgenden zur Ersparnis von Schreibarbeit
ν =nπ
α(5.85)
benutzt worden ist. Die Randbedingung p1(a) = p2(a) erfullt man einfachschon, wenn die genannten prinzipiellen Ansatze noch kreuzweise unter Ein-setzen von r = a multipliziert werden:
p1(r, ϕ) =∞∑n=0
an cos(νϕ) Jν(k0r) ·H(2)ν (k0a) (5.86)
p2(r, ϕ) =∞∑n=0
an cos(νϕ) Jν(k0a) ·H(2)ν (k0r) . (5.87)

104 5 Randwertprobleme in Zylinderkoordinaten
Man sieht sofort, dass p1(a) = p2(a) bereits erfullt ist. Es bleibt nur noch, dieinhomogene Randbedingung wie in (5.57)
V2(a)− V1(a) = Qδ(ϕ− ϕ0) (5.88)
zur Bestimmung der unbekannten Koeffizienten zu benutzen, und danach die
”ominose“ Große Q durch eine Sonderbetrachtung auf ihre Bedeutung hin zuuntersuchen.
Die aus (5.86) und (5.87) folgende Schnelle-Differenz ist
V2(a) − V1(a) =j
ω%0
∂p2 − p1
∂r
∣∣∣∣r=a
=j
%0c
1k0
∂p2 − p1
∂r
∣∣∣∣r=a
=∞∑n=0
an cos(νϕ){
Jν(k0a)H(2)′ν (k0a)− J′ν(k0a)H(2)
ν (k0a)}. (5.89)
Die geschweifte Klammer wird zu
{ } = Jν [J′ν − jN′ν ]− J′ν [Jν − jNν ] = −j [JνN′ν − J′νNν ] =2jπk0a
nach (5.30b). Damit lasst sich (5.88) vereinfachen zu
∞∑n=0
an cos(νϕ) = Q′δ(ϕ− ϕ0) (5.90)
mit dem ”neu definierten Q′“, das spater physikalisch bestimmt und dessenZusammenhang mit Q deshalb gar nicht interessiert. Die Auflosung von (5.90)nach einem am gestaltet sich wieder denkbar einfach: das Integral
α∫0
cos(nπϕ
α
)cos(mπϕ
α
)dϕ =
0 n 6= mα2 n = m 6= 0α n = m = 0
ermoglicht es wieder, ein Element in (5.90) zu isolieren: (ε0 = 2, εm = 1 furm > 0)
εmα
2· am = Q′
α∫0
δ(ϕ− ϕ0) cos(mπαϕ)
dϕ
oder
am =2Q′
αεmcos(mπαϕ0
). (5.91)
Damit gehen die Ansatze (5.86) und (5.87) uber in Losungen
p1(r, ϕ) =2Q′
α
∞∑n=0
1εn
cos(νϕ) cos(νϕ0) Jν(k0r) H(2)ν (k0a) (5.92)
5.4 Abschirmwande und Abschirmwalle 105
und
p2(r, ϕ) =2Q′
α
∞∑n=0
1εn
cos(νϕ) cos(νϕ0) Jν(k0a) H(2)ν (k0r) . (5.93)
Nun zur Betrachtung der Bedeutung von Q′. Dazu wird die Quelle auf ϕ0 = πgedreht, und gleichzeitig wird der reflektierende Keil mit α = 2π zur halb-unendlichen, schallharten Schneide gemacht. Es ist damit
ν =nπ
α=n
2
undcos(νϕ0) = cos
(nπ2
).
Die Summanden mit n = 1, 3, 5, ..., 2m + 1, ... entfallen also, es bleiben nurdie Summanden mit n = 0, 2, 4, ...2m, ... ubrig. Demnach wird aus (5.92) mitcos(mπ) = (−1)m
p1(r, ϕ) =Q′
π
∞∑m=0
(−1)m
εmcos(mϕ) Jm(k0r) H(2)
m (k0a) . (5.94)
Dass dieses Schallfeld genau gleich ist zum Beugungsfeld am Zylinder ”beiweggelassenem Zylinder“ Gl. (5.75), das ist eigentlich selbstverstandlich.Dann liegt die Linienquelle namlich in einer Ebene mit der halbunendlichenSchneide, die dem Schallfeld keinerlei Angriffsflache bietet: sie ist akustischganzlich unwirksam, man kann sie also in Gedanken einfach weglassen. Dem-nach beschreiben also (5.94) und (5.75) beide einfach das ”freie“, durch kei-nen Reflektor veranderte Feld einer Quelle im Punkt r = a, ϕ0 = π. Wiedergenugt es einfacherweise, die Quelle durch den Druck zu beschreiben, den sieim Freien im Abstand a – im Ursprung zum Beispiel – hinterlassen wurde
pQ(0) =Q′
2πH(2)
0 (k0a) . (5.95)
Damit ist nach (5.92) und (5.93)
p1(r, ϕ) = pQ(0)4πα
∞∑n=0
cos(νϕ) cos(νϕ0)εn
Jν(k0r)H(2)ν (k0a)
H(2)0 (k0a)
(5.96)
und
p2(r, ϕ) = pQ(0)4πα
∞∑n=0
cos(νϕ) cos(νϕ0)εn
Jν(k0r)H(2)ν (k0r)
H(2)0 (k0a)
. (5.97)
Wieder sollen bei Auswertungen und Prinzip-Diskussionen weit entfernteQuellen und damit schrag einlaufende ebene Wellen betrachtet werden. Mitα→∞ wird also der Schalleinfall beschrieben durch
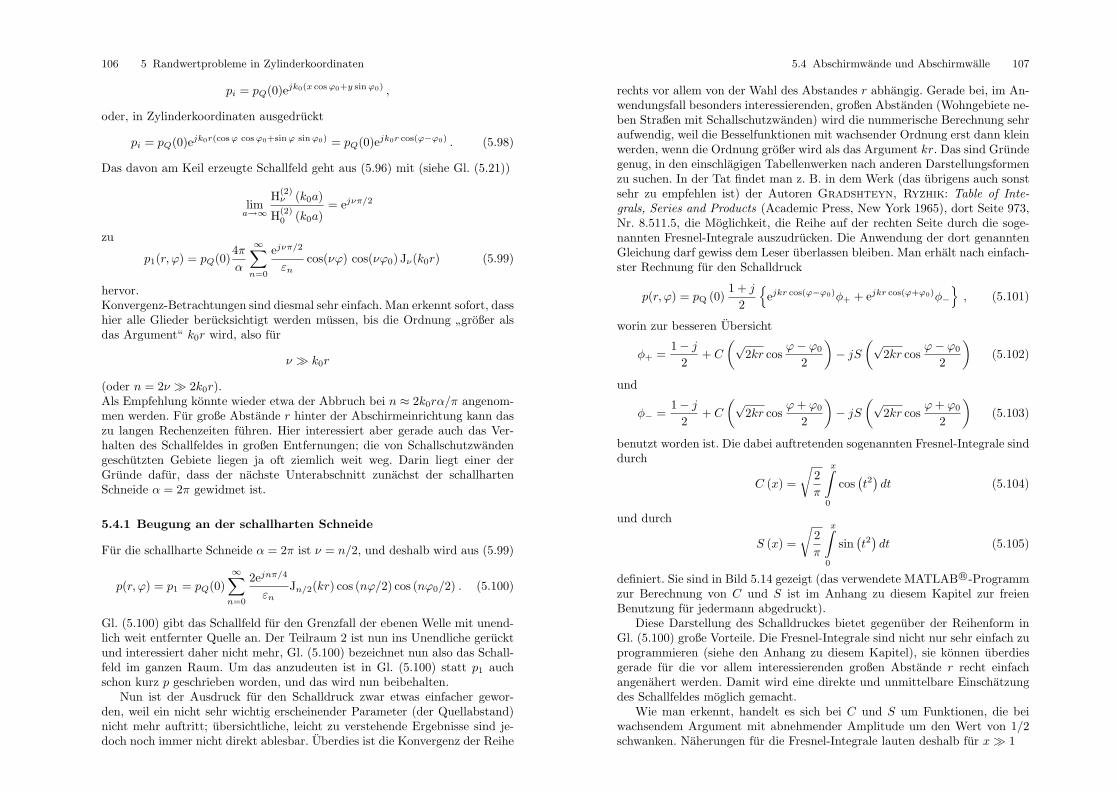
106 5 Randwertprobleme in Zylinderkoordinaten
pi = pQ(0)ejk0(x cosϕ0+y sinϕ0) ,
oder, in Zylinderkoordinaten ausgedruckt
pi = pQ(0)ejk0r(cosϕ cosϕ0+sinϕ sinϕ0) = pQ(0)ejk0r cos(ϕ−ϕ0) . (5.98)
Das davon am Keil erzeugte Schallfeld geht aus (5.96) mit (siehe Gl. (5.21))
lima→∞
H(2)ν (k0a)
H(2)0 (k0a)
= ejνπ/2
zu
p1(r, ϕ) = pQ(0)4πα
∞∑n=0
ejνπ/2
εncos(νϕ) cos(νϕ0) Jν(k0r) (5.99)
hervor.Konvergenz-Betrachtungen sind diesmal sehr einfach. Man erkennt sofort, dasshier alle Glieder berucksichtigt werden mussen, bis die Ordnung ”großer alsdas Argument“ k0r wird, also fur
ν � k0r
(oder n = 2ν � 2k0r).Als Empfehlung konnte wieder etwa der Abbruch bei n ≈ 2k0rα/π angenom-men werden. Fur große Abstande r hinter der Abschirmeinrichtung kann daszu langen Rechenzeiten fuhren. Hier interessiert aber gerade auch das Ver-halten des Schallfeldes in großen Entfernungen; die von Schallschutzwandengeschutzten Gebiete liegen ja oft ziemlich weit weg. Darin liegt einer derGrunde dafur, dass der nachste Unterabschnitt zunachst der schallhartenSchneide α = 2π gewidmet ist.
5.4.1 Beugung an der schallharten Schneide
Fur die schallharte Schneide α = 2π ist ν = n/2, und deshalb wird aus (5.99)
p(r, ϕ) = p1 = pQ(0)∞∑n=0
2ejnπ/4
εnJn/2(kr) cos (nϕ/2) cos (nϕ0/2) . (5.100)
Gl. (5.100) gibt das Schallfeld fur den Grenzfall der ebenen Welle mit unend-lich weit entfernter Quelle an. Der Teilraum 2 ist nun ins Unendliche gerucktund interessiert daher nicht mehr, Gl. (5.100) bezeichnet nun also das Schall-feld im ganzen Raum. Um das anzudeuten ist in Gl. (5.100) statt p1 auchschon kurz p geschrieben worden, und das wird nun beibehalten.
Nun ist der Ausdruck fur den Schalldruck zwar etwas einfacher gewor-den, weil ein nicht sehr wichtig erscheinender Parameter (der Quellabstand)nicht mehr auftritt; ubersichtliche, leicht zu verstehende Ergebnisse sind je-doch noch immer nicht direkt ablesbar. Uberdies ist die Konvergenz der Reihe
5.4 Abschirmwande und Abschirmwalle 107
rechts vor allem von der Wahl des Abstandes r abhangig. Gerade bei, im An-wendungsfall besonders interessierenden, großen Abstanden (Wohngebiete ne-ben Straßen mit Schallschutzwanden) wird die nummerische Berechnung sehraufwendig, weil die Besselfunktionen mit wachsender Ordnung erst dann kleinwerden, wenn die Ordnung großer wird als das Argument kr. Das sind Grundegenug, in den einschlagigen Tabellenwerken nach anderen Darstellungsformenzu suchen. In der Tat findet man z. B. in dem Werk (das ubrigens auch sonstsehr zu empfehlen ist) der Autoren Gradshteyn, Ryzhik: Table of Inte-grals, Series and Products (Academic Press, New York 1965), dort Seite 973,Nr. 8.511.5, die Moglichkeit, die Reihe auf der rechten Seite durch die soge-nannten Fresnel-Integrale auszudrucken. Die Anwendung der dort genanntenGleichung darf gewiss dem Leser uberlassen bleiben. Man erhalt nach einfach-ster Rechnung fur den Schalldruck
p(r, ϕ) = pQ (0)1 + j
2
{ejkr cos(ϕ−ϕ0)φ+ + ejkr cos(ϕ+ϕ0)φ−
}, (5.101)
worin zur besseren Ubersicht
φ+ =1− j
2+ C
(√2kr cos
ϕ− ϕ0
2
)− jS
(√2kr cos
ϕ− ϕ0
2
)(5.102)
und
φ− =1− j
2+ C
(√2kr cos
ϕ+ ϕ0
2
)− jS
(√2kr cos
ϕ+ ϕ0
2
)(5.103)
benutzt worden ist. Die dabei auftretenden sogenannten Fresnel-Integrale sinddurch
C (x) =
√2π
x∫0
cos(t2)dt (5.104)
und durch
S (x) =
√2π
x∫0
sin(t2)dt (5.105)
definiert. Sie sind in Bild 5.14 gezeigt (das verwendete MATLAB R©-Programmzur Berechnung von C und S ist im Anhang zu diesem Kapitel zur freienBenutzung fur jedermann abgedruckt).
Diese Darstellung des Schalldruckes bietet gegenuber der Reihenform inGl. (5.100) große Vorteile. Die Fresnel-Integrale sind nicht nur sehr einfach zuprogrammieren (siehe den Anhang zu diesem Kapitel), sie konnen uberdiesgerade fur die vor allem interessierenden großen Abstande r recht einfachangenahert werden. Damit wird eine direkte und unmittelbare Einschatzungdes Schallfeldes moglich gemacht.
Wie man erkennt, handelt es sich bei C und S um Funktionen, die beiwachsendem Argument mit abnehmender Amplitude um den Wert von 1/2schwanken. Naherungen fur die Fresnel-Integrale lauten deshalb fur x� 1
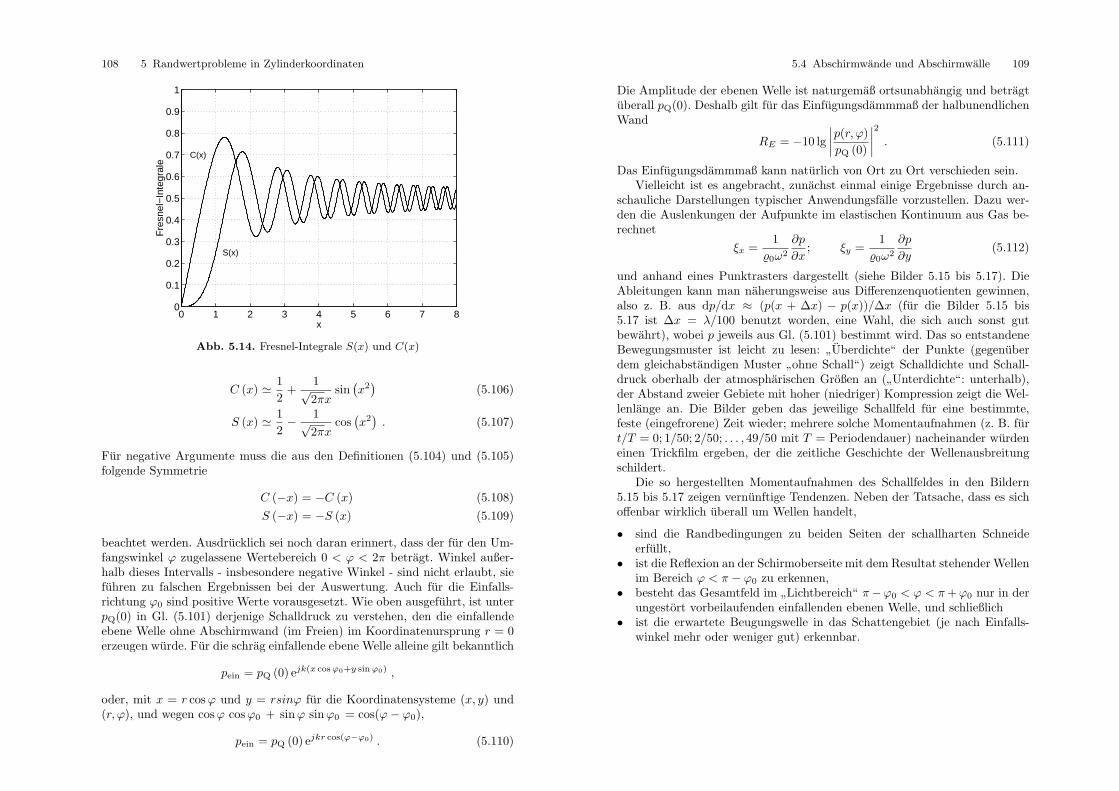
108 5 Randwertprobleme in Zylinderkoordinaten
0 1 2 3 4 5 6 7 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x
Fre
snel
−In
tegr
ale
S(x)
C(x)
Abb. 5.14. Fresnel-Integrale S(x) und C(x)
C (x) ' 12
+1√2πx
sin(x2)
(5.106)
S (x) ' 12− 1√
2πxcos(x2). (5.107)
Fur negative Argumente muss die aus den Definitionen (5.104) und (5.105)folgende Symmetrie
C (−x) = −C (x) (5.108)S (−x) = −S (x) (5.109)
beachtet werden. Ausdrucklich sei noch daran erinnert, dass der fur den Um-fangswinkel ϕ zugelassene Wertebereich 0 < ϕ < 2π betragt. Winkel außer-halb dieses Intervalls - insbesondere negative Winkel - sind nicht erlaubt, siefuhren zu falschen Ergebnissen bei der Auswertung. Auch fur die Einfalls-richtung ϕ0 sind positive Werte vorausgesetzt. Wie oben ausgefuhrt, ist unterpQ(0) in Gl. (5.101) derjenige Schalldruck zu verstehen, den die einfallendeebene Welle ohne Abschirmwand (im Freien) im Koordinatenursprung r = 0erzeugen wurde. Fur die schrag einfallende ebene Welle alleine gilt bekanntlich
pein = pQ (0) ejk(x cosϕ0+y sinϕ0) ,
oder, mit x = r cosϕ und y = rsinϕ fur die Koordinatensysteme (x, y) und(r, ϕ), und wegen cosϕ cosϕ0 + sinϕ sinϕ0 = cos(ϕ− ϕ0),
pein = pQ (0) ejkr cos(ϕ−ϕ0) . (5.110)
5.4 Abschirmwande und Abschirmwalle 109
Die Amplitude der ebenen Welle ist naturgemaß ortsunabhangig und betragtuberall pQ(0). Deshalb gilt fur das Einfugungsdammmaß der halbunendlichenWand
RE = −10 lg∣∣∣∣p(r, ϕ)pQ (0)
∣∣∣∣2 . (5.111)
Das Einfugungsdammmaß kann naturlich von Ort zu Ort verschieden sein.Vielleicht ist es angebracht, zunachst einmal einige Ergebnisse durch an-
schauliche Darstellungen typischer Anwendungsfalle vorzustellen. Dazu wer-den die Auslenkungen der Aufpunkte im elastischen Kontinuum aus Gas be-rechnet
ξx =1
%0ω2
∂p
∂x; ξy =
1%0ω2
∂p
∂y(5.112)
und anhand eines Punktrasters dargestellt (siehe Bilder 5.15 bis 5.17). DieAbleitungen kann man naherungsweise aus Differenzenquotienten gewinnen,also z. B. aus dp/dx ≈ (p(x + ∆x) − p(x))/∆x (fur die Bilder 5.15 bis5.17 ist ∆x = λ/100 benutzt worden, eine Wahl, die sich auch sonst gutbewahrt), wobei p jeweils aus Gl. (5.101) bestimmt wird. Das so entstandeneBewegungsmuster ist leicht zu lesen: ”Uberdichte“ der Punkte (gegenuberdem gleichabstandigen Muster ”ohne Schall“) zeigt Schalldichte und Schall-druck oberhalb der atmospharischen Großen an (”Unterdichte“: unterhalb),der Abstand zweier Gebiete mit hoher (niedriger) Kompression zeigt die Wel-lenlange an. Die Bilder geben das jeweilige Schallfeld fur eine bestimmte,feste (eingefrorene) Zeit wieder; mehrere solche Momentaufnahmen (z. B. furt/T = 0; 1/50; 2/50; . . . , 49/50 mit T = Periodendauer) nacheinander wurdeneinen Trickfilm ergeben, der die zeitliche Geschichte der Wellenausbreitungschildert.
Die so hergestellten Momentaufnahmen des Schallfeldes in den Bildern5.15 bis 5.17 zeigen vernunftige Tendenzen. Neben der Tatsache, dass es sichoffenbar wirklich uberall um Wellen handelt,
• sind die Randbedingungen zu beiden Seiten der schallharten Schneideerfullt,
• ist die Reflexion an der Schirmoberseite mit dem Resultat stehender Wellenim Bereich ϕ < π − ϕ0 zu erkennen,
• besteht das Gesamtfeld im ”Lichtbereich“ π−ϕ0 < ϕ < π+ϕ0 nur in derungestort vorbeilaufenden einfallenden ebenen Welle, und schließlich
• ist die erwartete Beugungswelle in das Schattengebiet (je nach Einfalls-winkel mehr oder weniger gut) erkennbar.
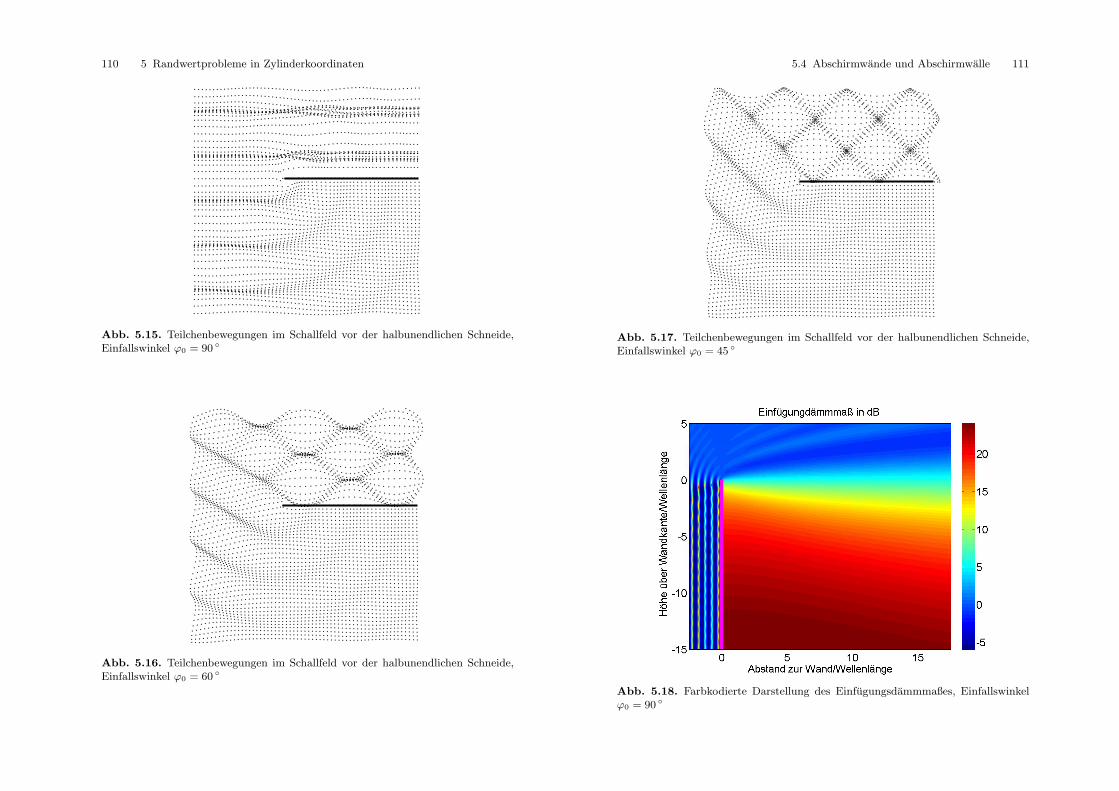
110 5 Randwertprobleme in Zylinderkoordinaten
Abb. 5.15. Teilchenbewegungen im Schallfeld vor der halbunendlichen Schneide,Einfallswinkel ϕ0 = 90 ◦
Abb. 5.16. Teilchenbewegungen im Schallfeld vor der halbunendlichen Schneide,Einfallswinkel ϕ0 = 60 ◦
5.4 Abschirmwande und Abschirmwalle 111
Abb. 5.17. Teilchenbewegungen im Schallfeld vor der halbunendlichen Schneide,Einfallswinkel ϕ0 = 45 ◦
Abb. 5.18. Farbkodierte Darstellung des Einfugungsdammmaßes, Einfallswinkelϕ0 = 90 ◦
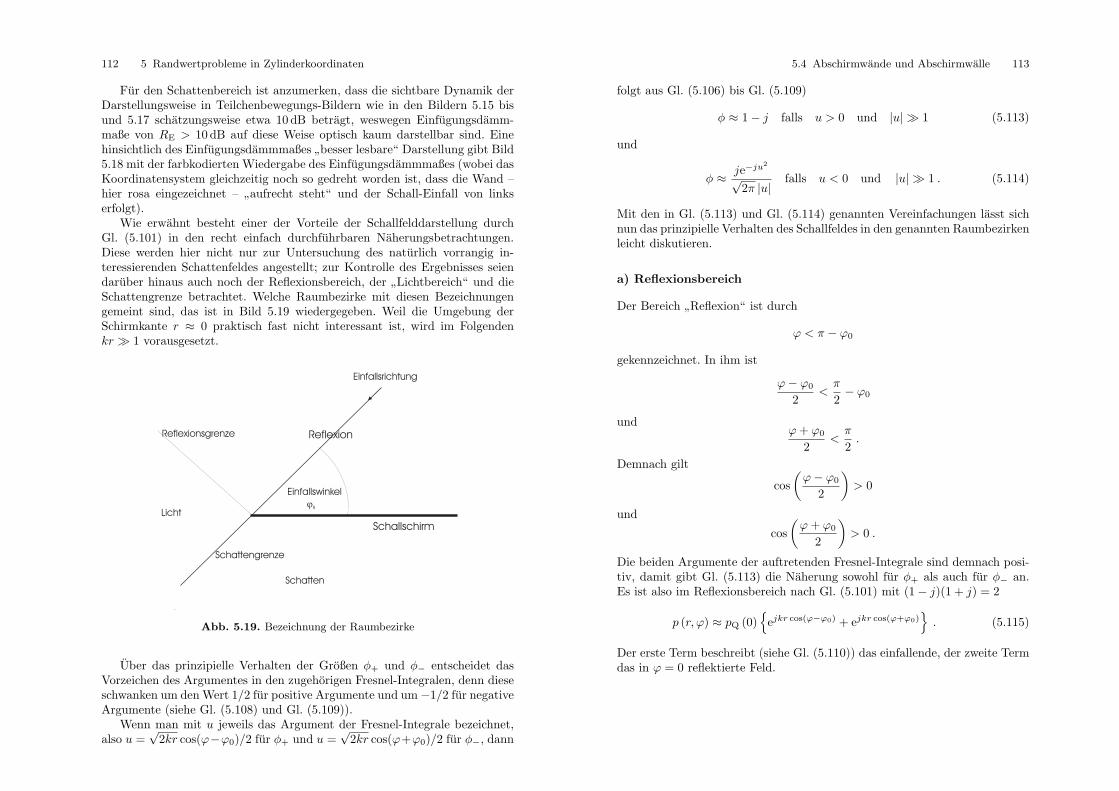
112 5 Randwertprobleme in Zylinderkoordinaten
Fur den Schattenbereich ist anzumerken, dass die sichtbare Dynamik derDarstellungsweise in Teilchenbewegungs-Bildern wie in den Bildern 5.15 bisund 5.17 schatzungsweise etwa 10 dB betragt, weswegen Einfugungsdamm-maße von RE > 10 dB auf diese Weise optisch kaum darstellbar sind. Einehinsichtlich des Einfugungsdammmaßes ”besser lesbare“ Darstellung gibt Bild5.18 mit der farbkodierten Wiedergabe des Einfugungsdammmaßes (wobei dasKoordinatensystem gleichzeitig noch so gedreht worden ist, dass die Wand –hier rosa eingezeichnet – ”aufrecht steht“ und der Schall-Einfall von linkserfolgt).
Wie erwahnt besteht einer der Vorteile der Schallfelddarstellung durchGl. (5.101) in den recht einfach durchfuhrbaren Naherungsbetrachtungen.Diese werden hier nicht nur zur Untersuchung des naturlich vorrangig in-teressierenden Schattenfeldes angestellt; zur Kontrolle des Ergebnisses seiendaruber hinaus auch noch der Reflexionsbereich, der ”Lichtbereich“ und dieSchattengrenze betrachtet. Welche Raumbezirke mit diesen Bezeichnungengemeint sind, das ist in Bild 5.19 wiedergegeben. Weil die Umgebung derSchirmkante r ≈ 0 praktisch fast nicht interessant ist, wird im Folgendenkr � 1 vorausgesetzt.
Schallschirm
Einfallsrichtung
Einfallswinkel
j0
Reflexion
Schatten
Licht
Reflexionsgrenze
Schattengrenze
Abb. 5.19. Bezeichnung der Raumbezirke
Uber das prinzipielle Verhalten der Großen φ+ und φ− entscheidet dasVorzeichen des Argumentes in den zugehorigen Fresnel-Integralen, denn dieseschwanken um den Wert 1/2 fur positive Argumente und um−1/2 fur negativeArgumente (siehe Gl. (5.108) und Gl. (5.109)).
Wenn man mit u jeweils das Argument der Fresnel-Integrale bezeichnet,also u =
√2kr cos(ϕ−ϕ0)/2 fur φ+ und u =
√2kr cos(ϕ+ϕ0)/2 fur φ−, dann
5.4 Abschirmwande und Abschirmwalle 113
folgt aus Gl. (5.106) bis Gl. (5.109)
φ ≈ 1− j falls u > 0 und |u| � 1 (5.113)
und
φ ≈ je−ju2
√2π |u| falls u < 0 und |u| � 1 . (5.114)
Mit den in Gl. (5.113) und Gl. (5.114) genannten Vereinfachungen lasst sichnun das prinzipielle Verhalten des Schallfeldes in den genannten Raumbezirkenleicht diskutieren.
a) Reflexionsbereich
Der Bereich ”Reflexion“ ist durch
ϕ < π − ϕ0
gekennzeichnet. In ihm ist
ϕ− ϕ0
2<π
2− ϕ0
undϕ+ ϕ0
2<π
2.
Demnach gilt
cos(ϕ− ϕ0
2
)> 0
und
cos(ϕ+ ϕ0
2
)> 0 .
Die beiden Argumente der auftretenden Fresnel-Integrale sind demnach posi-tiv, damit gibt Gl. (5.113) die Naherung sowohl fur φ+ als auch fur φ− an.Es ist also im Reflexionsbereich nach Gl. (5.101) mit (1− j)(1 + j) = 2
p (r, ϕ) ≈ pQ (0){
ejkr cos(ϕ−ϕ0) + ejkr cos(ϕ+ϕ0)}. (5.115)
Der erste Term beschreibt (siehe Gl. (5.110)) das einfallende, der zweite Termdas in ϕ = 0 reflektierte Feld.
114 5 Randwertprobleme in Zylinderkoordinaten
b) Lichtbereich
Der Bereich ”Licht“ bezeichnet den Raumteil, in dem die ungestorte, einfal-lende Welle als Resultat erwartet wird. Hier ist
π − ϕ0 < ϕ < π + ϕ0,
und demnach giltπ
2− ϕ0 <
ϕ− ϕ0
2<π
2und
π
2<ϕ+ ϕ0
2<π
2+ ϕ0 .
Aus diesem Grund ist
cos(ϕ− ϕ0
2
)> 0
und
cos(ϕ+ ϕ0
2
)< 0 .
Es ist also φ+ ≈ 1 − j, fur die vorausgesetzten großen Abstande kr � 1dagegen wird φ− nach Gl. (5.114) klein und kann deswegen gegenuber φ+
vernachlassigt werden. Demnach besteht das Gesamtfeld nach Gl. (5.101)
p (r, ϕ) = pQ (0) ejkr cos(ϕ−ϕ0)
ganz richtig nur aus der einfallenden Welle.Die Betrachtungen im Reflexions-Bereich und im Licht-Bereich dienten
mehr der nachtraglichen Kontrolle der Gleichungen; die folgenden Betrachtun-gen im Schattenbereich dagegen geben an, welcher Nutzen vom Schallschirmerwartet werden kann.
c) Schattengrenze
Auf der Schattengrenzeϕ = π + ϕ0
giltϕ− ϕ0
2=π
2und
ϕ+ ϕ0
2=π
2+ ϕ0 .
Das Argument der Fresnel-Integrale fur φ+ ist, wegen cos((ϕ − ϕ0)/2) = 0,ebenfalls gleich Null, und es ist mit S = C = 0
φ+ =1− j
2.
5.4 Abschirmwande und Abschirmwalle 115
Das Argument der Fresnel-Integrale fur φ− ist wegen
cos(ϕ+ ϕ0
2
)< 0
negativ. Nach Gl. (5.114) kann man dann φ− wieder gegenuber φ+ ver-nachlassigen und erhalt
p (r, ϕ) = pQ (0)12
e−jkr . (5.116)
Fur großere Entfernungen von der Schirmkante erhalt man demnach auf derSchattengrenze eine Halbierung des einfallenden Schallfeldes. Man konntediese Tatsache als ”durch den Schirm hergestellte halbe Abdeckung“ der weitentfernten Quelle deuten, ahnlich wie beim Sonnenuntergang, bei dem zu ei-nem bestimmten Zeitpunkt nur das halbe Himmelsgestirn sichtbar ist. Auf derSchattengrenze strebt das Einfugungsdammmaß mit der Entfernung gegen
RE = 6 dB . (5.117)
d) Schattengebiet
Im Schattengebietϕ > ϕ0 + π
giltϕ− ϕ0
2>π
2und
ϕ+ ϕ0
2>π
2+ ϕ0 .
Diesmal sind die Argumente aller Fresnel-Integrale negativ, und es ist deshalbnach Gl. (5.114)
φ+ ≈ je−j2kr cos2(ϕ−ϕ02 )
√2π∣∣∣√2kr cos
(ϕ−ϕ0
2
)∣∣∣φ− ≈ je−j2kr cos2(ϕ+ϕ0
2 )√
2π∣∣∣√2kr cos
(ϕ+ϕ0
2
)∣∣∣ .Demnach gilt fur den Druck
p = pQ (0)j − 12√
2πe−jkr√
2kr
{1∣∣cos(ϕ−ϕ0
2
)∣∣ +1∣∣cos(ϕ+ϕ0
2
)∣∣}
(5.118)
(fur die Argumente der Exponentialfunktionen ist von cos(α)− 2 cos2(α/2) =cos(α)− (1 + cos(α)) = −1 Gebrauch gemacht worden).
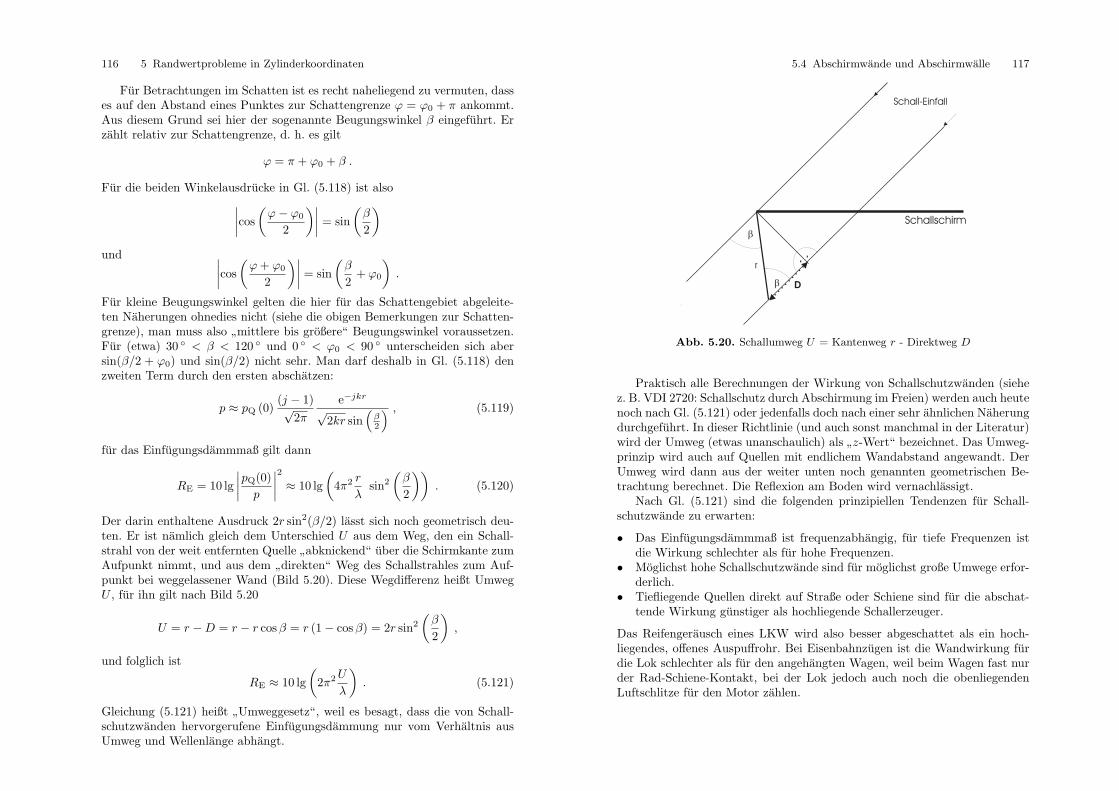
116 5 Randwertprobleme in Zylinderkoordinaten
Fur Betrachtungen im Schatten ist es recht naheliegend zu vermuten, dasses auf den Abstand eines Punktes zur Schattengrenze ϕ = ϕ0 + π ankommt.Aus diesem Grund sei hier der sogenannte Beugungswinkel β eingefuhrt. Erzahlt relativ zur Schattengrenze, d. h. es gilt
ϕ = π + ϕ0 + β .
Fur die beiden Winkelausdrucke in Gl. (5.118) ist also∣∣∣∣cos(ϕ− ϕ0
2
)∣∣∣∣ = sin(β
2
)und ∣∣∣∣cos
(ϕ+ ϕ0
2
)∣∣∣∣ = sin(β
2+ ϕ0
).
Fur kleine Beugungswinkel gelten die hier fur das Schattengebiet abgeleite-ten Naherungen ohnedies nicht (siehe die obigen Bemerkungen zur Schatten-grenze), man muss also ”mittlere bis großere“ Beugungswinkel voraussetzen.Fur (etwa) 30 ◦ < β < 120 ◦ und 0 ◦ < ϕ0 < 90 ◦ unterscheiden sich abersin(β/2 + ϕ0) und sin(β/2) nicht sehr. Man darf deshalb in Gl. (5.118) denzweiten Term durch den ersten abschatzen:
p ≈ pQ (0)(j − 1)√
2πe−jkr√
2kr sin(β2
) , (5.119)
fur das Einfugungsdammmaß gilt dann
RE = 10 lg∣∣∣∣pQ(0)
p
∣∣∣∣2 ≈ 10 lg(
4π2 r
λsin2
(β
2
)). (5.120)
Der darin enthaltene Ausdruck 2r sin2(β/2) lasst sich noch geometrisch deu-ten. Er ist namlich gleich dem Unterschied U aus dem Weg, den ein Schall-strahl von der weit entfernten Quelle ”abknickend“ uber die Schirmkante zumAufpunkt nimmt, und aus dem ”direkten“ Weg des Schallstrahles zum Auf-punkt bei weggelassener Wand (Bild 5.20). Diese Wegdifferenz heißt UmwegU , fur ihn gilt nach Bild 5.20
U = r −D = r − r cosβ = r (1− cosβ) = 2r sin2
(β
2
),
und folglich ist
RE ≈ 10 lg(
2π2U
λ
). (5.121)
Gleichung (5.121) heißt ”Umweggesetz“, weil es besagt, dass die von Schall-schutzwanden hervorgerufene Einfugungsdammung nur vom Verhaltnis ausUmweg und Wellenlange abhangt.
5.4 Abschirmwande und Abschirmwalle 117
Schallschirm
Schall-Einfall
b
b
. .r
D
Abb. 5.20. Schallumweg U = Kantenweg r - Direktweg D
Praktisch alle Berechnungen der Wirkung von Schallschutzwanden (siehez. B. VDI 2720: Schallschutz durch Abschirmung im Freien) werden auch heutenoch nach Gl. (5.121) oder jedenfalls doch nach einer sehr ahnlichen Naherungdurchgefuhrt. In dieser Richtlinie (und auch sonst manchmal in der Literatur)wird der Umweg (etwas unanschaulich) als ”z-Wert“ bezeichnet. Das Umweg-prinzip wird auch auf Quellen mit endlichem Wandabstand angewandt. DerUmweg wird dann aus der weiter unten noch genannten geometrischen Be-trachtung berechnet. Die Reflexion am Boden wird vernachlassigt.
Nach Gl. (5.121) sind die folgenden prinzipiellen Tendenzen fur Schall-schutzwande zu erwarten:
• Das Einfugungsdammmaß ist frequenzabhangig, fur tiefe Frequenzen istdie Wirkung schlechter als fur hohe Frequenzen.
• Moglichst hohe Schallschutzwande sind fur moglichst große Umwege erfor-derlich.
• Tiefliegende Quellen direkt auf Straße oder Schiene sind fur die abschat-tende Wirkung gunstiger als hochliegende Schallerzeuger.
Das Reifengerausch eines LKW wird also besser abgeschattet als ein hoch-liegendes, offenes Auspuffrohr. Bei Eisenbahnzugen ist die Wandwirkung furdie Lok schlechter als fur den angehangten Wagen, weil beim Wagen fast nurder Rad-Schiene-Kontakt, bei der Lok jedoch auch noch die obenliegendenLuftschlitze fur den Motor zahlen.
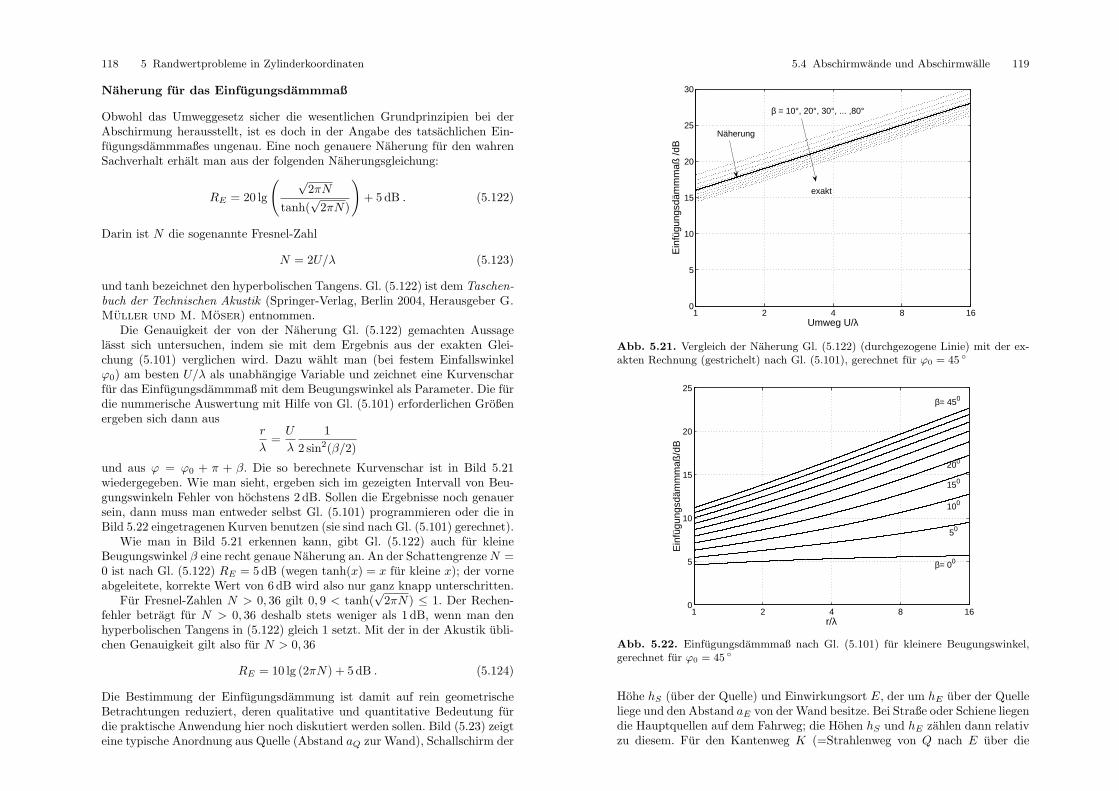
118 5 Randwertprobleme in Zylinderkoordinaten
Naherung fur das Einfugungsdammmaß
Obwohl das Umweggesetz sicher die wesentlichen Grundprinzipien bei derAbschirmung herausstellt, ist es doch in der Angabe des tatsachlichen Ein-fugungsdammmaßes ungenau. Eine noch genauere Naherung fur den wahrenSachverhalt erhalt man aus der folgenden Naherungsgleichung:
RE = 20 lg
( √2πN
tanh(√
2πN)
)+ 5 dB . (5.122)
Darin ist N die sogenannte Fresnel-Zahl
N = 2U/λ (5.123)
und tanh bezeichnet den hyperbolischen Tangens. Gl. (5.122) ist dem Taschen-buch der Technischen Akustik (Springer-Verlag, Berlin 2004, Herausgeber G.Muller und M. Moser) entnommen.
Die Genauigkeit der von der Naherung Gl. (5.122) gemachten Aussagelasst sich untersuchen, indem sie mit dem Ergebnis aus der exakten Glei-chung (5.101) verglichen wird. Dazu wahlt man (bei festem Einfallswinkelϕ0) am besten U/λ als unabhangige Variable und zeichnet eine Kurvenscharfur das Einfugungsdammmaß mit dem Beugungswinkel als Parameter. Die furdie nummerische Auswertung mit Hilfe von Gl. (5.101) erforderlichen Großenergeben sich dann aus
r
λ=U
λ
12 sin2(β/2)
und aus ϕ = ϕ0 + π + β. Die so berechnete Kurvenschar ist in Bild 5.21wiedergegeben. Wie man sieht, ergeben sich im gezeigten Intervall von Beu-gungswinkeln Fehler von hochstens 2 dB. Sollen die Ergebnisse noch genauersein, dann muss man entweder selbst Gl. (5.101) programmieren oder die inBild 5.22 eingetragenen Kurven benutzen (sie sind nach Gl. (5.101) gerechnet).
Wie man in Bild 5.21 erkennen kann, gibt Gl. (5.122) auch fur kleineBeugungswinkel β eine recht genaue Naherung an. An der SchattengrenzeN =0 ist nach Gl. (5.122) RE = 5 dB (wegen tanh(x) = x fur kleine x); der vorneabgeleitete, korrekte Wert von 6 dB wird also nur ganz knapp unterschritten.
Fur Fresnel-Zahlen N > 0, 36 gilt 0, 9 < tanh(√
2πN) ≤ 1. Der Rechen-fehler betragt fur N > 0, 36 deshalb stets weniger als 1 dB, wenn man denhyperbolischen Tangens in (5.122) gleich 1 setzt. Mit der in der Akustik ubli-chen Genauigkeit gilt also fur N > 0, 36
RE = 10 lg (2πN) + 5 dB . (5.124)
Die Bestimmung der Einfugungsdammung ist damit auf rein geometrischeBetrachtungen reduziert, deren qualitative und quantitative Bedeutung furdie praktische Anwendung hier noch diskutiert werden sollen. Bild (5.23) zeigteine typische Anordnung aus Quelle (Abstand aQ zur Wand), Schallschirm der
5.4 Abschirmwande und Abschirmwalle 119
1 2 4 8 160
5
10
15
20
25
30
Umweg U/λ
Ein
fügu
ngsd
ämm
maß
/dB
exakt
Näherung
β = 10°, 20°, 30°, ... ,80°
Abb. 5.21. Vergleich der Naherung Gl. (5.122) (durchgezogene Linie) mit der ex-akten Rechnung (gestrichelt) nach Gl. (5.101), gerechnet fur ϕ0 = 45 ◦
1 2 4 8 160
5
10
15
20
25
r/λ
Ein
fügu
ngsd
ämm
maß
/dB
β= 00
50
100
150
200
β= 450
Abb. 5.22. Einfugungsdammmaß nach Gl. (5.101) fur kleinere Beugungswinkel,gerechnet fur ϕ0 = 45 ◦
Hohe hS (uber der Quelle) und Einwirkungsort E, der um hE uber der Quelleliege und den Abstand aE von der Wand besitze. Bei Straße oder Schiene liegendie Hauptquellen auf dem Fahrweg; die Hohen hS und hE zahlen dann relativzu diesem. Fur den Kantenweg K (=Strahlenweg von Q nach E uber die

120 5 Randwertprobleme in Zylinderkoordinaten
Q, Quel le
E, Empfänger,Einwirkungsort
Schal lschutzwand
hShE
BodenaQaE
Abb. 5.23. Anordnung aus Quelle Q, Schallschutzwand der Hohe hS und Einwir-kungsort E
Schirmspitze) folgt nach zweimaliger Anwendung des Satzes von Pythagoras
K =√h2S + a2
Q +√
(hS − hE)2 + a2E ,
fur den Direktweg gilt
D =√h2E + (aE + aQ)2 .
Der Umweg U betragt U = K −D. In der Praxis liegen die schutzenswertenGebiete fast immer so weit entfernt, dass aE >> hS gilt. Typisch sind gewissEntfernungen aE von mindestens 100 Metern oder sogar mehreren hundertMetern und Schirmhohen von selten mehr als 5 Metern. Praktisch immer giltalso aE >> hS . Die Ausdrucke mit (hS−hE)2 bzw. mit h2
E sind also sehr vielkleiner als a2
E , solange hE nicht zu sehr uber die Schirmhohe hS hinauswachst.Betruge beispielsweise aE = 20(hS −hE), dann ware ja (hS −hE)2 = a2
E/400eine vergleichsweise außerordentlich kleine Zahl, die den Wert der betroffenenWurzel fast nicht beeinflusst. Die quadratisch kleinen Terme in den Wurzelnkonnen also vernachlassigt werden. Dafur erhalt man
K =√h2S + a2
Q + aE
undD = aE + aQ .
Fur grosse Abstande aE hangt also der Umweg U mit
U = K −D =√h2S + a2
Q − aQ (5.125)
fast nicht von Messabstand aE und Messpunkthohe hE ab. Das Einfugungs-dammmaß wird daher ausschließlich durch Quellabstand aQ und SchirmhohehS bestimmt, es ist fast unabhangig von der Wahl des Empfangspunktes E.
Aus dieser Uberlegung kann auch die realistische Großenordnung des Ein-fugungsdammmaßes abgeschatzt werden. Als Beispiel sei eine (etwa ubliche)5 m Wand an einer breiten, dreispurigen Straße betrachtet. Die Spurbreitebetragt etwa 3,5 m, hinzu kommen noch einmal 3 m Abstand vom Fahrbahn-rand zur Schallschutzwand (z. B. fur die Standspur). In etwa kann man die
5.4 Abschirmwande und Abschirmwalle 121
Quelle in der Straßenmitte, also in ungefahr 8 m Entfernung zur Wand anneh-men. Damit ergibt sich ein Umweg von 1,43 m. Die Schwerpunktfrequenz furVerkehrslarm liegt bei etwa 1000 Hz mit λ = 0, 34 m. Die Fresnelzahl betragtdamit N = 8, 44. Wegen N > 0, 36 kann Gl. (5.124) benutzt werden, und ausihr ergibt sich RE = 22, 2 dB.
Bemerkenswert ist noch, dass der Umweg U uber dem Abstand aQ zwi-schen Wand und Quelle monoton abnimmt. Die Wirkung der Schallschutz-wand ist also um so großer, je naher Quelle und Wand zusammengebrachtwerden konnen.
5.4.2 Bedeutung der Hohe von Schallschutzwanden
Naturlich fragt sich noch, welche Vorteile eine vergroßerte Bauhohe der Wandzu bieten hat. Wenn bei ansonsten unveranderter Situation eine hohere Schall-schutzwand h2 gegenuber der bisherigen Hohe h1 vorgesehen wird, dann wirddamit der Vorteil ∆R
∆R = 10 lg(U2
U1
)(5.126)
fur das Einfugungsdammmaß erreicht. Dabei bezeichnen U1 und U2 die zuh1 und h2 gehorenden Umwege. Der gewonnene Vorteil hangt jetzt noch vomQuellabstand ab. Das Intervall, in dem der Zugewinn ∆R liegen muss, kannallgemein jedoch einfach eingeschatzt werden. Der minimale Zugewinn ergibtsich dann, wenn die Wand bereits ”gut wirkt“; das ist der Fall fur einen kleinenWandabstand zur Quelle. Dann sind nach Gl. (5.125) die Umwege gleich denHohen und es gilt
∆Rmin = 10 lg(h2
h1
). (5.127)
Fur weit entfernte Quellen andererseits, deren Abstand a viel großer ist alsdie Wandhohe h, gilt etwa √
a2 + h2 ≈ a+h2
2a, (5.128)
also betragt der Umweg U ≈ h2/2a. Deswegen gilt
∆Rmax = 20 lg(h2
h1
)= 2∆Rmin . (5.129)
Fur weit entfernte Quellen wirkt sich also ein Bauhohenzuwachs in einemgroßeren Dammungsgewinn aus als fur nah an der Wand angesiedelte Quel-len. Die Verbesserungen sind dabei - jedenfalls unter realistischen Annah-men - nicht allzu hoch. Wird z. B. statt einer Wand von 5 m Hohe eine mit6 m Hohe gebaut, dann liegt der Zugewinn an Dammung zwischen 0,8 dBund 1,6 dB, abhangig von der Lage der Quelle. Selbst die Verdopplung derBauhohe bewirkt nur Verbesserungen zwischen 3 und 6 dB. Hohe erforderli-che Einfugungsdammmaße sind bei Schallschutzwanden recht teuer.

122 5 Randwertprobleme in Zylinderkoordinaten
Wie das Beispiel im vorigen Abschnitt zeigt, konnen Schallschutzwandegrob etwa 20 dB Einfugungsdammung erzielen. Noch deutlich großere Damm-maße wurden wahre Wand-Giganten erforderlich machen. Schallschutzwandebilden damit gewiss ein wichtiges Hilfsmittel zur Larmbekampfung; ebensogewiss stellen sie allerdings auch kein Allheilmittel dar.
5.4.3 Schallschutzwalle
Das einfache Modell eines Hindernisses in Form einer halbunendlichen Wandhat eine recht ubersichtliche Beschreibung des Beugungs- und Reflexionsge-schehens ergeben. Dafur sind doch einige Fragen offen geblieben. Lassen sichz. B. die Berechnungsvorschriften ohne weiteres auch auf andere Geometrien,wie zum Beispiel auf Schallschutzwalle an Stelle von Wanden, ubertragen?
Z. B. lasst sich auch die Wirkung keilformiger Schallschutzwande (also vonSchallschutzwallen) theoretisch berechnen (siehe die Bilder 5.24 und 5.25).
0 5 1 2 40
5
10
15
20
25
r/λ
Ein
fügu
ngsd
ämm
maß
/dB
Keilöffnungswinkel in Grad =0, 30, 60, 90, 120
Abb. 5.24. Einfugungsdammmaß von keilformigen Schallschutzwallen, gerechnetfur den Einfallswinkel ϕ0 = 60 ◦ und den Beugungswinkel β = 60 ◦
Die zur Berechnung erforderliche Gleichung ist bereits bekannt (namlichGl. (5.99)), wobei fur die Ordnungs-Zahlen ν = nπ/α = nπ/(2π−γ) gilt (γ =Offnungswinkel des Keiles ”innen“). Hier scheint keine andere Ausdrucksformdurch einfacher handhabbare Funktionen bekannt zu sein; deshalb wird dieSummation direkt ohne weitere Umformung programmiert, wobei man sichzunachst (wie weiter oben geschildert) daruber Gedanken machen muss, wodie Summe abgebrochen werden kann.
5.4 Abschirmwande und Abschirmwalle 123
Abb. 5.25. Reflexion und Beugung an keilformigen Schallschutzwallen
Zwei numerische Auswertungen davon seien hier noch in den Bildern 5.24und 5.25 wiedergegeben. Wie man in Bild 5.24 erkennt, spielt der Offnungs-winkel unterhalb von 90 ◦ praktisch keine Rolle, man kann also fur γ < 90 ◦
ganz zu recht das Umweggesetz benutzen, oberhalb von 90 ◦ dagegen werdendie Abweichungen vom Umweggesetz rasch signifikant, hier liegen schlechtereRE vor als sie sich fur die gestreckte halbunendliche Schneide ergeben wurden.Offnungswinkel von mehr als 120 ◦ kommen durchaus bei Hausdachern undaufgeschutteten Erdwallen vor; wie man sieht muss man mit zum Teil nichtunerheblichen Einbußen bei der Schalldammung gegenuber gleich hohen, ge-streckten Wanden rechnen.
5.4.4 Absorbierende Schallschutzwande
Bei großen Gerauscherzeugern wie z. B. Lastkraftwagen oder Eisenbahnzugenliegen die eigentlichen Quellen zwar tief, sie bestehen namlich wie gesagthauptsachlich aus Reifengerausch oder Rollgerausch des Rad-Schiene-Kon-taktes. Das Schallfeld wird aber auf einem Zick-Zack-Kurs wie in Bild 5.26nach oben gefuhrt und trifft dann schließlich unter einem fur die Abschirmwir-kung recht ungunstigen Winkel auf die Kante. Dieser Effekt bewirkt quasi eineVerlagerung der Quelle von Schiene oder Straße zu einem viel hoher gelege-nen Ort. Dadurch sinkt die dammende Wirkung ganz betrachtlich. Vermiedenwerden kann dieser Effekt durch die Benutzung von quellseitig absorbierendenSchallschutzwanden, nur diese werden heute fast ausschließlich in der Praxiseingesetzt. Eine robuste, wetterbestandige und feuerfeste Absorptionsschichtkann zum Beispiel aus einer Mischung aus Beton, Holzfasern und Luft herge-stellt werden. Messbeispiele fur die Wirkung der absorbierenden Belegung imSchattengebiet hinter der Wand gibt Bild 5.27.
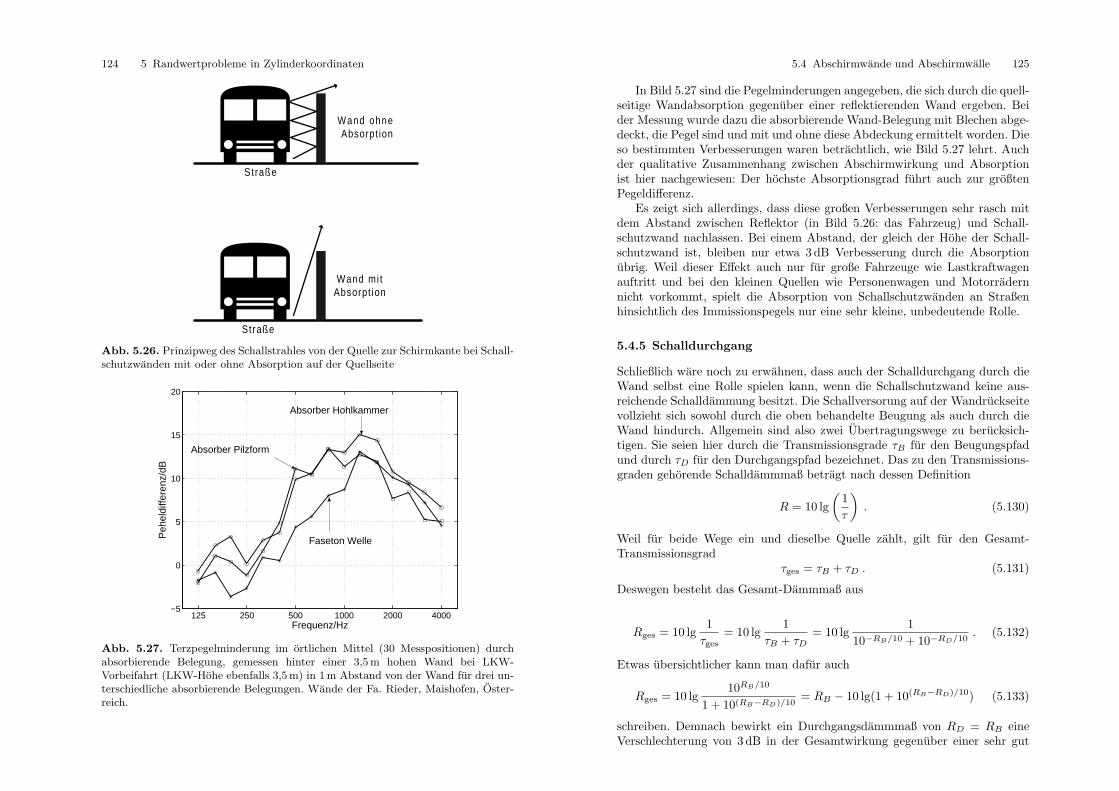
124 5 Randwertprobleme in Zylinderkoordinaten
Y Wand ohne Absorpt ion
Straße
Y Wand mi tAbsorpt ion
Straße
Abb. 5.26. Prinzipweg des Schallstrahles von der Quelle zur Schirmkante bei Schall-schutzwanden mit oder ohne Absorption auf der Quellseite
125 250 500 1000 2000 4000−5
0
5
10
15
20
Frequenz/Hz
Peh
eldi
ffere
nz/d
B
Absorber Hohlkammer
Faseton Welle
Absorber Pilzform
Abb. 5.27. Terzpegelminderung im ortlichen Mittel (30 Messpositionen) durchabsorbierende Belegung, gemessen hinter einer 3,5 m hohen Wand bei LKW-Vorbeifahrt (LKW-Hohe ebenfalls 3,5 m) in 1 m Abstand von der Wand fur drei un-terschiedliche absorbierende Belegungen. Wande der Fa. Rieder, Maishofen, Oster-reich.
5.4 Abschirmwande und Abschirmwalle 125
In Bild 5.27 sind die Pegelminderungen angegeben, die sich durch die quell-seitige Wandabsorption gegenuber einer reflektierenden Wand ergeben. Beider Messung wurde dazu die absorbierende Wand-Belegung mit Blechen abge-deckt, die Pegel sind und mit und ohne diese Abdeckung ermittelt worden. Dieso bestimmten Verbesserungen waren betrachtlich, wie Bild 5.27 lehrt. Auchder qualitative Zusammenhang zwischen Abschirmwirkung und Absorptionist hier nachgewiesen: Der hochste Absorptionsgrad fuhrt auch zur großtenPegeldifferenz.
Es zeigt sich allerdings, dass diese großen Verbesserungen sehr rasch mitdem Abstand zwischen Reflektor (in Bild 5.26: das Fahrzeug) und Schall-schutzwand nachlassen. Bei einem Abstand, der gleich der Hohe der Schall-schutzwand ist, bleiben nur etwa 3 dB Verbesserung durch die Absorptionubrig. Weil dieser Effekt auch nur fur große Fahrzeuge wie Lastkraftwagenauftritt und bei den kleinen Quellen wie Personenwagen und Motorradernnicht vorkommt, spielt die Absorption von Schallschutzwanden an Straßenhinsichtlich des Immissionspegels nur eine sehr kleine, unbedeutende Rolle.
5.4.5 Schalldurchgang
Schließlich ware noch zu erwahnen, dass auch der Schalldurchgang durch dieWand selbst eine Rolle spielen kann, wenn die Schallschutzwand keine aus-reichende Schalldammung besitzt. Die Schallversorung auf der Wandruckseitevollzieht sich sowohl durch die oben behandelte Beugung als auch durch dieWand hindurch. Allgemein sind also zwei Ubertragungswege zu berucksich-tigen. Sie seien hier durch die Transmissionsgrade τB fur den Beugungspfadund durch τD fur den Durchgangspfad bezeichnet. Das zu den Transmissions-graden gehorende Schalldammmaß betragt nach dessen Definition
R = 10 lg(
1τ
). (5.130)
Weil fur beide Wege ein und dieselbe Quelle zahlt, gilt fur den Gesamt-Transmissionsgrad
τges = τB + τD . (5.131)
Deswegen besteht das Gesamt-Dammmaß aus
Rges = 10 lg1τges
= 10 lg1
τB + τD= 10 lg
110−RB/10 + 10−RD/10
. (5.132)
Etwas ubersichtlicher kann man dafur auch
Rges = 10 lg10RB/10
1 + 10(RB−RD)/10= RB − 10 lg(1 + 10(RB−RD)/10) (5.133)
schreiben. Demnach bewirkt ein Durchgangsdammmaß von RD = RB eineVerschlechterung von 3 dB in der Gesamtwirkung gegenuber einer sehr gut

126 5 Randwertprobleme in Zylinderkoordinaten
dammenden Wand. Fur RD = RB + 6 dB betragt das Gesamt-DammmaßRges = RB − 1 dB; fur RD = RB + 10 dB gilt schließlich Rges = RB − 0, 4 dB.Wie oben gezeigt, sind selbst kleinere Zugewinne an Dammung oft nur mitnicht unbetrachtlichen Bauhohenzuwachsen erreichbar. Deshalb sollte wenig-stens beim Schalldurchgang keine Dammung ”verschenkt“ und etwa RD =RB + 6 dB angestrebt werden.
5.4.6 Beugung an Wanden mit aufgesetzten Zylindern
Es ist naheliegend, die Dammung von Schallschutzwanden durch aufgesetzteZylinder zu beeinflussen: wenn man oben auf der Kante einen schallweichenZylinder z = 0 anbringt, dann macht das Schallfeld - wie in Abschnitt 5.3.3beschrieben - ”einen Bogen“ um diesen Reflektor, weil es sich an Flachen z = 0nicht anlegen kann. Das musste doch in einem langerem Umweg bei gleich-zeitig nur geringer Bauhohen-Vergroßerung der Konstruktion resultieren; esließen sich also so Schallschutzwande bauen, die ”akustisch hoher“ sind als
”optisch“. Dieser Gedanke wird in den Arbeiten von M. Moser: Die Wir-kung von zylindrischen Aufsatzen an Schallschirmen, ACUSTICA 81 (1995),S. 565-586, naher untersucht.
5.5 Abstrahlung und Beugung im dreidimensionalenRaum
Es sei angenommen, dass die radial nach außen weisende Schallschnelle v(ϕ, z)auf einem Zylinder r = a uberall bekannt sei. Dieses Problem ist leicht zulosen, wenn man alle Feldgroßen hinsichtlich der z-Richtung fouriertransfor-miert:
V (k, ϕ) =∞∫−∞
v(ϕ, z) e−jkzdz (5.134)
P (k, r, ϕ) =∞∫−∞
p(r, ϕ, z) e−jkzdz (5.135)
Wenn P einmal bekannt ist, dann braucht man nur noch die Rucktransfor-mation
p(r, ϕ, z) =1
2π
∞∫−∞
P (k, r, ϕ) ejkzdk (5.136)
auszufuhren und erhalt den Druck p.Die Wellengleichung (5.12) wird ebenfalls uber z fouriertransformiert und lie-fert
∂2P
∂r2+
1r
∂P
∂r+
1r2
∂2P
∂ϕ2+(k2
0 − k2)P = 0 (5.137)
5.5 Abstrahlung und Beugung im dreidimensionalen Raum 127
Der Vergleich mit Gl. (5.13) zeigt sich: Der ganze Unterschied zu den zwei-dimensionalen Problemen besteht darin, dass an die Stelle von k2
0 hier nunk2
0 − k2 tritt. Fur Ansatze der Form (der Einfachheit halber ist p(ϕ) = p(−ϕ)angenommen)
P (k, ϕ, r) =∞∑n=0
cos(nϕ) fn(r) (5.138)
erhalt man also diesmal
fn(r) = An ·H(1)n (krr) +BnH(2)
n (krr) (5.139)
worink2r = k2
0 − k2 (5.140)
Weil k2r großer oder kleiner als Null sein kann, ist kr reell oder imaginar. Es
ist empfehlenswert, das Vorzeichen beim Wurzelziehen jetzt zu definieren:
kr =
{+√k2
0 − k2 k20 > k2
−j√k2 − k2
0 k20 < k2
(5.141)
Offensichtlich konnen diesmal - abhangig von k - auch Bessel- und Hankel-funktionen eines imaginaren Arguments auftreten. Sie bereiten keinerlei num-merische Schwierigkeiten (MATLAB R©z. B. lasst allgemein komplexe Argu-mente zu). Auch die Gleichungen (5.19) bis (5.30) behalten fur komplexe xihre Gultigkeit. Gleichung (5.21) liefert folgende anschauliche Zuordnungen:
H(2)n (krr) beschreibt
• fur reelles kr eine in r-Richtung nach außen laufende Welle, H(2)n ∼ e−jkrr,
• fur imaginares kr = −j|kr| ein nach außen exponentiell abklingendes Feld,H(2)n ∼ e−|kr|r,
und H(1)n (krr) beschreibt
• fur reelles kr eine entgegen der r-Richtung nach innen laufende Welle,H(2)n ∼ ejkrr
• und fur imaginares kr = −j|kr| ein nach innen exponentiell abklingendesFeld, H(2)
n ∼ e|kr|r.
Fur das Abstrahl-Problem macht man daher den Ansatz
P (k, ϕ, r) =∞∑n=0
An cos(nϕ) H(2)n (krr) (5.142)

128 5 Randwertprobleme in Zylinderkoordinaten
Es mussen nun nur noch (auf genau dem gleichen Weg wie in Abschnitt 5.3.2beschrieben) die Koeffizienten An aus V (k, ϕ) bestimmt werden, und das Pro-blem ist gelost. Fur Aufgabenstellungen, in denen Reflexionen vorkommenkonnen (Beugung am Zylinder z. B.), muss man naturlich
P (k, ϕ, r) =∞∑n=0
cos(nϕ){AnH(2)
n (krr) +BnH(1)n (krr)
}(5.143)
ansetzen. Punkt-Quellen ließen sich durch
v(a+ ε)− v(a− ε) = Qδ(ϕ− ϕ0) · δ(z) (5.144)
modellieren.
5.6 Schallausbreitung in Rohren (Kundtsches Rohr)
In diesem Abschnitt wird die Schallausbreitung in einem mit einem Gasgefullten Rohr mit Kreisquerschnitt behandelt (Radius = a, z-Achse = Rohr-Achse). Die Rohrwandung wird dabei
• entweder als schallhart mit vr(r = a, ϕ) = 0• oder als schallweich mit p(r = a, ϕ) = 0
angenommen. Der schallharte Fall kommt z. B. bei den fur die Messung vonAbsorptionsgraden verwendeten sogenannten ”Kundtschen Rohren“ vor; ofthandelt es sich dabei um Rohre mit einem sehr steifen und schweren Stahl-mantel. Schallweiche Rohre wurden z. B. einem luftgefullten Schlauch aus wei-chem und leichtem Material in Wasser entsprechen. Eine solche Anordnungist praktisch sicher nur sehr selten wirklich auch von Interesse. Andererseitsbedeutet die Mit-Behandlung des schallweichen Zylinders bei der Betrach-tung des schallharten Falles nur eine recht geringfugige Mehrarbeit. Uberdiesbesteht zwischen den Glasfaserkabeln zur Leitung von Licht und gerade demschallweichen, gasgefullten Zylinder eine Analogie, so dass vielleicht schon ausdiesem Grund der zusatzliche Aufwand lohnt.
Zur Bestimmung des Schallfeldes im Inneren des Rohres geht man vondem naheliegenden Ansatz
p(r, ϕ, z) =∞∑n=0
Rn(r) cos(nϕ) e−jkzz (5.145)
aus. Dabei sind die beiden folgende Annahmen und Uberlegungen berucksich-tigt worden:
• Bezuglich der Umfangsrichtung ϕ wurde Symmetrie p(−ϕ) = p(ϕ) vor-ausgesetzt; falls das nicht der Fall ist, muss die Losung wie vorne um denungeraden Anteil erganzt werden.
5.6 Schallausbreitung in Rohren (Kundtsches Rohr) 129
• Hinsichtlich der Rohr-Langsrichtung z ist eine Wellenausbreitung mit denzunachst noch unbekannten Wellenzahlen kz angenommen worden. Fallsman imaginare kz erhalt, liegen exponentiell abklingende Nahfelder vor.
Zunachst mussen die noch nicht bestimmten Funktionen Rn(r) aus derHelmholtz-Gleichung 5.12 bestimmt werden. Durch Einsetzen der Summan-den des Ansatzes (5.145) erhalt man
d2Rndr2
+1r
dRndr
+(k2
0 − k2z −
n2
r2
)Rn = 0 . (5.146)
Der Vergleich mit der Differentialgleichung (5.16) mit den Losungen Jn(k0r)und Nn(k0r) zeigt, dass auch diesmal die Losungen Rn in Bessel- undNeumann-Funktionen bestehen
Rn(r) = anJn(qr) + bnNn(qr)
nur dass diesmal k0 durch q mit
q2 = k20 − k2
z (5.147)
ersetzt werden musste. Weil die Neumannfunktionen wieder Pole auf derRohrachse r = 0 besitzen, kommen sie hier nicht als Ansatzfunktionen inFrage. Damit geht der Ansatz Gl. (5.145) uber in
p(r, ϕ, z) =∞∑n=0
anJn(qr) cos(nϕ) e−jkzz , (5.148)
wobei die Wellenzahlen kz und die Koeffizienten q in den Bessel-Funktionennoch durch Gl. (5.147) miteinander verknupft sind. Wie das Folgende zeigt,folgen die Zahlenwerte von moglichen q direkt aus den Randbedingungen amZylinder-Mantel. Man bestimmt nun also alle denkbaren Werte von q unddann aus Gl. (5.147) die zugehorigen Wellenzahlen fur die Ausbreitung ent-lang der z-Richtung. Dabei mussen naturlich die beiden genannten prinzi-piellen Randbedingungen, schallharte Wandung mit vr(r = a, ϕ) = 0 oderschallweiche Berandung mit p(r = a, ϕ) = 0, getrennt betrachtet werden.Weil der schallweiche Fall (ein wenig) leichter ist, sei mit ihm begonnen.
Schallweicher Mantel
Ganz offensichtlich mussen die zugelassenen Zahlenwerte von q so beschaffensein, dass
Jn(qa) = 0 (5.149)
gilt. Die moglichen qa sind also die Nullstellen der Besselfunktion. Um dasprazise zu formulieren, bezeichnet man die Nullstellen der BesselfunktionJn(x) mit xnm. Es gilt also Jn(xnm) = 0; xnm gibt demnach die m-te Null-stelle der Besselfunktion Jn der Ordnung n an. Die Zahlenwerte von xnm kann
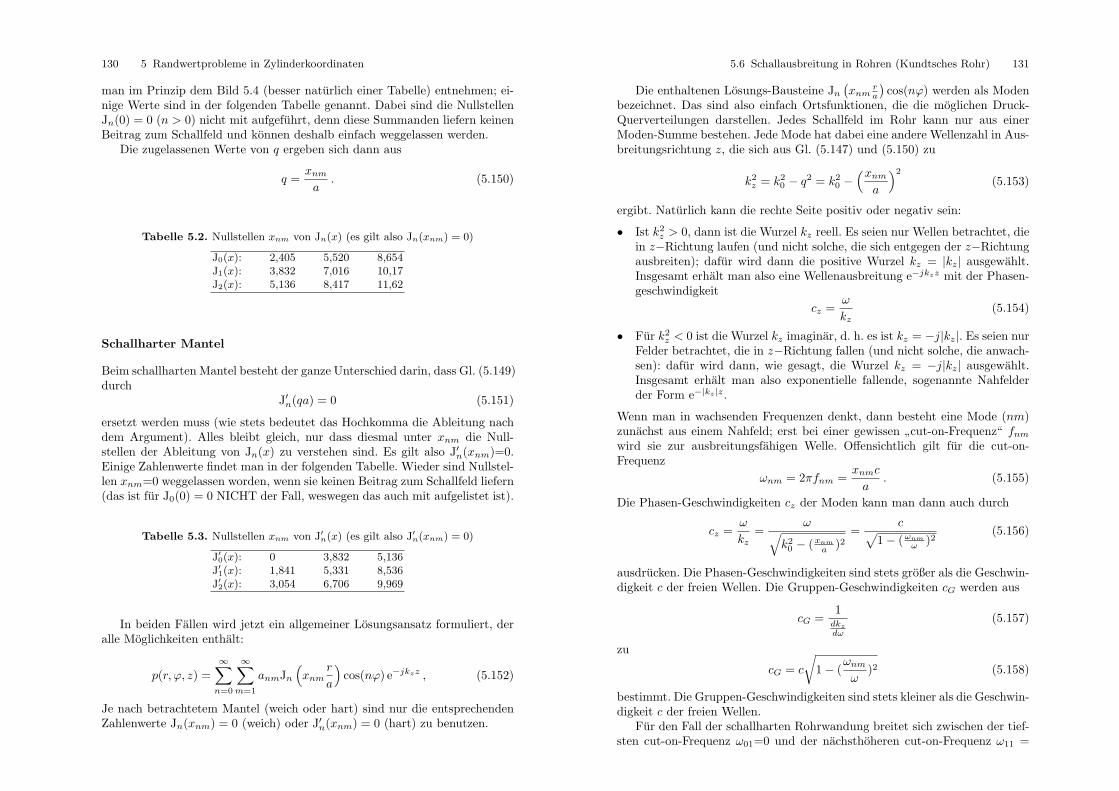
130 5 Randwertprobleme in Zylinderkoordinaten
man im Prinzip dem Bild 5.4 (besser naturlich einer Tabelle) entnehmen; ei-nige Werte sind in der folgenden Tabelle genannt. Dabei sind die NullstellenJn(0) = 0 (n > 0) nicht mit aufgefuhrt, denn diese Summanden liefern keinenBeitrag zum Schallfeld und konnen deshalb einfach weggelassen werden.
Die zugelassenen Werte von q ergeben sich dann aus
q =xnma
. (5.150)
Tabelle 5.2. Nullstellen xnm von Jn(x) (es gilt also Jn(xnm) = 0)
J0(x): 2,405 5,520 8,654J1(x): 3,832 7,016 10,17J2(x): 5,136 8,417 11,62
Schallharter Mantel
Beim schallharten Mantel besteht der ganze Unterschied darin, dass Gl. (5.149)durch
J′n(qa) = 0 (5.151)
ersetzt werden muss (wie stets bedeutet das Hochkomma die Ableitung nachdem Argument). Alles bleibt gleich, nur dass diesmal unter xnm die Null-stellen der Ableitung von Jn(x) zu verstehen sind. Es gilt also J′n(xnm)=0.Einige Zahlenwerte findet man in der folgenden Tabelle. Wieder sind Nullstel-len xnm=0 weggelassen worden, wenn sie keinen Beitrag zum Schallfeld liefern(das ist fur J0(0) = 0 NICHT der Fall, weswegen das auch mit aufgelistet ist).
Tabelle 5.3. Nullstellen xnm von J′n(x) (es gilt also J′n(xnm) = 0)
J′0(x): 0 3,832 5,136J′1(x): 1,841 5,331 8,536J′2(x): 3,054 6,706 9,969
In beiden Fallen wird jetzt ein allgemeiner Losungsansatz formuliert, deralle Moglichkeiten enthalt:
p(r, ϕ, z) =∞∑n=0
∞∑m=1
anmJn(xnm
r
a
)cos(nϕ) e−jkzz , (5.152)
Je nach betrachtetem Mantel (weich oder hart) sind nur die entsprechendenZahlenwerte Jn(xnm) = 0 (weich) oder J′n(xnm) = 0 (hart) zu benutzen.
5.6 Schallausbreitung in Rohren (Kundtsches Rohr) 131
Die enthaltenen Losungs-Bausteine Jn(xnm
ra
)cos(nϕ) werden als Moden
bezeichnet. Das sind also einfach Ortsfunktionen, die die moglichen Druck-Querverteilungen darstellen. Jedes Schallfeld im Rohr kann nur aus einerModen-Summe bestehen. Jede Mode hat dabei eine andere Wellenzahl in Aus-breitungsrichtung z, die sich aus Gl. (5.147) und (5.150) zu
k2z = k2
0 − q2 = k20 −
(xnma
)2
(5.153)
ergibt. Naturlich kann die rechte Seite positiv oder negativ sein:
• Ist k2z > 0, dann ist die Wurzel kz reell. Es seien nur Wellen betrachtet, die
in z−Richtung laufen (und nicht solche, die sich entgegen der z−Richtungausbreiten); dafur wird dann die positive Wurzel kz = |kz| ausgewahlt.Insgesamt erhalt man also eine Wellenausbreitung e−jkzz mit der Phasen-geschwindigkeit
cz =ω
kz(5.154)
• Fur k2z < 0 ist die Wurzel kz imaginar, d. h. es ist kz = −j|kz|. Es seien nur
Felder betrachtet, die in z−Richtung fallen (und nicht solche, die anwach-sen): dafur wird dann, wie gesagt, die Wurzel kz = −j|kz| ausgewahlt.Insgesamt erhalt man also exponentielle fallende, sogenannte Nahfelderder Form e−|kz|z.
Wenn man in wachsenden Frequenzen denkt, dann besteht eine Mode (nm)zunachst aus einem Nahfeld; erst bei einer gewissen ”cut-on-Frequenz“ fnmwird sie zur ausbreitungsfahigen Welle. Offensichtlich gilt fur die cut-on-Frequenz
ωnm = 2πfnm =xnmc
a. (5.155)
Die Phasen-Geschwindigkeiten cz der Moden kann man dann auch durch
cz =ω
kz=
ω√k2
0 − (xnma )2=
c√1− (ωnmω )2
(5.156)
ausdrucken. Die Phasen-Geschwindigkeiten sind stets großer als die Geschwin-digkeit c der freien Wellen. Die Gruppen-Geschwindigkeiten cG werden aus
cG =1dkzdω
(5.157)
zu
cG = c
√1− (
ωnmω
)2 (5.158)
bestimmt. Die Gruppen-Geschwindigkeiten sind stets kleiner als die Geschwin-digkeit c der freien Wellen.
Fur den Fall der schallharten Rohrwandung breitet sich zwischen der tief-sten cut-on-Frequenz ω01=0 und der nachsthoheren cut-on-Frequenz ω11 =

132 5 Randwertprobleme in Zylinderkoordinaten
1, 841 c/a (siehe Tabelle 5.6), also im Frequenzbereich 0 < ω < ω11, nur dieMode mit konstanter Querverteilung aus. In ausreichender Entfernung vonder Quelle besteht das Schallfeld also nur noch in
p(r, φ, z) = a01 e−jk0z . (5.159)
Oberhalb von ω11 konnen dann andere ausbreitungsfahige Moden dazu kom-men; das Schallfeld im Rohr ist dann nicht mehr eben.
Fur den Fall der schallweichen Rohrwandung ist die tiefste vorkommendecut-on-Frequenz mit ω01 = 2, 405 c/a großer als Null (siehe Tabelle 5.6). Des-halb existieren im Frequenzband ω < ω01 ausschließlich Nahfelder: in die-sem Frequenzband findet gar keine Wellenausbreitung statt! Der Wellenleiterwird erst oberhalb von ω01 sozusagen ”in Betrieb gesetzt“. Schallweich be-randete Rohre waren deshalb (im genannten Frequenzbereich) ausgezeichneteSchalldampfer. Leider zeigt die Betrachtung der Realisierungsmoglichkeiten,dass diese nur recht schmalbandig herstellbar sind (siehe Vorlesung TechnischeAkustik II ).
Schließlich bliebe noch die Frage offen, wie die bislang noch unbekanntgebliebenen modalen Amplituden anm berechnet werden konnen. Naturlichwird die Große eines Schallfeldes immer von der Quelle bestimmt, und dasist auch hier der Fall. Deshalb muss es moglich sein, die modalen Amplitudenaus der Quelle zu berechnen. Am einfachsten nimmt man dazu an, dass diez-gerichtete Schallschnelle an der beliebig gewahlten Stelle z = 0 bekannt sei:die Schnellevorgabe vz(r, ϕ) bildet damit die Quelle (die beispielsweise durchdie Schwingungen einer gestreckten Membran dann realisiert werden konnte).Im nachsten Schritt entwickelt man vz(r, ϕ) nun in Moden-Funktionen
vz(r, ϕ) =∞∑n=0
∞∑m=1
VnmJn(xnm
r
a
)cos(nϕ) , (5.160)
(wobei die Koeffizienten Vnm durch Integration uber
vz(r, ϕ)Jn(xnm
r
a
)cos(nϕ)
berechnet werden konnen) und vergleicht das mit der aus dem Ansatz (5.152)folgenden Schnelle
vz(r, ϕ, z = 0) =1%0c
∞∑n=0
∞∑m=1
kzk0anmJn
(xnm
r
a
)cos(nϕ) . (5.161)
Dieser Vergleich liefert
anm = %0cVnmk0
kz, (5.162)
womit die modalen Amplituden berechnet worden sind.
Literaturverzeichnis
1. Abramowitz, M.; Stegun, I.A. (Hrsg.): Handbook of Mathematical Func-tions, 9th Dover Printing, Dover, New York (1972)
2. Bronstein, I.; Semendjajew, K.: Taschenbuch der Mathematik, HarriDeutsch, Frankfurt am Main (2001)
3. Cremer, L.; Heckl, M.: Korperschall, Springer, Berlin (1994)4.5. Gradshteyn, I.S.; Rhyzik, I.M.: Tables of Integrals, Series and Products,
Academic Press, New York (1980) Grobner, W.; Hofreiter, N.: Integraltafel,4. Auflage, Springer, Wien (1965)
6. Heckl, M.: Abstrahlung von ebenen Schallquellen, ACUSTICA 37 (1977), S.155 – 166
7. Kuttruff, H.; Quadt, H.P.: Elektroakustische Schallquellen mit ungebundel-ter Schallabstrahlung, ACUSTICA 41 (1978), S. 1 – 10
8. Kuttruff, H.; Quadt, H.P.: Lautsprecherzeilen mit ungebundelter Schallab-strahlung, Fortschritte der Akustik – DAGA’78, Bad Honnef (1978), S. 637 –640
9. Kuttruff, H.; Sung, K.M.: Piezoelektrische Ultraschallsender mit un-gebundelter Schallabstrahlung, ACUSTICA 43 (1979), S. 162 – 166
10. Moser, M.: Schallabstrahlung durch ebene Strahler, Fortschritte der Akustik –DAGA’85, Bad Honnef (1985), S. 63 – 70
11. Moser, M.: Die Wirkung von zylindrischen Aufsatzen an Schallschirmen,ACOUSTICA 81 (1995), S. 565 – 586
12. Moser, M.: Schallschutzwande mit verbesserter Schattenwirkung, Fortschritteder Akustik – DAGA 2001 (2001)
13. Moser, M.: Technische Akustik, 7. Auflage, Springer, Berlin (2007)14. Moser, M.; Volz, R.: Improvement of sound barriers using headpieces with
finite acoustic impedance, J. Acoust. Soc. Am. 106 (1999), S. 3049 – 306015. Morse, P.M.: Vibration and Sound, McGraw-Hill, New York (1948)16. Morse, P.M.; Ingard K.U.: Theoretical Acoustics, McGraw-Hill, New York
(1968)17. Muller, G.; Moser, M.: Taschenbuch der Technischen Akustik, 4. Auflage,
Springer, Berlin (2004)18. Skudrzyk, E.: The Foundations of Acoustics, Springer, Wien (1971)