the risk-return tradeoff in optimizing regional earthquake mitigation investment
TRANSCRIPT

This article was downloaded by: [University of South Carolina ]On: 06 October 2013, At: 01:13Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House,37-41 Mortimer Street, London W1T 3JH, UK
Structure and Infrastructure Engineering:Maintenance, Management, Life-Cycle Design andPerformancePublication details, including instructions for authors and subscription information:http://www.tandfonline.com/loi/nsie20
The risk-return tradeoff in optimizing regionalearthquake mitigation investmentNingxiong Xu a , Rachel A. Davidson a , Linda K. Nozick a & Atsuhiro Dodo ba School of Civil and Environmental Engineering, Hollister Hall, Cornell University, Ithaca,NY, 14853-3501, USb Swiss Reinsurance Company, 1-5-1 Otemachi, Chiyoda-ku, Tokyo, 100-0004, JapanPublished online: 16 Feb 2007.
To cite this article: Ningxiong Xu , Rachel A. Davidson , Linda K. Nozick & Atsuhiro Dodo (2007) The risk-return tradeoff inoptimizing regional earthquake mitigation investment, Structure and Infrastructure Engineering: Maintenance, Management,Life-Cycle Design and Performance, 3:2, 133-146, DOI: 10.1080/15732470600591083
To link to this article: http://dx.doi.org/10.1080/15732470600591083
PLEASE SCROLL DOWN FOR ARTICLE
Taylor & Francis makes every effort to ensure the accuracy of all the information (the “Content”) containedin the publications on our platform. However, Taylor & Francis, our agents, and our licensors make norepresentations or warranties whatsoever as to the accuracy, completeness, or suitability for any purpose of theContent. Any opinions and views expressed in this publication are the opinions and views of the authors, andare not the views of or endorsed by Taylor & Francis. The accuracy of the Content should not be relied upon andshould be independently verified with primary sources of information. Taylor and Francis shall not be liable forany losses, actions, claims, proceedings, demands, costs, expenses, damages, and other liabilities whatsoeveror howsoever caused arising directly or indirectly in connection with, in relation to or arising out of the use ofthe Content.
This article may be used for research, teaching, and private study purposes. Any substantial or systematicreproduction, redistribution, reselling, loan, sub-licensing, systematic supply, or distribution in anyform to anyone is expressly forbidden. Terms & Conditions of access and use can be found at http://www.tandfonline.com/page/terms-and-conditions
The risk-return tradeoff in optimizing regionalearthquake mitigation investment
NINGXIONG XU{, RACHEL A. DAVIDSON{, LINDA K. NOZICK*{ and ATSUHIRO DODO{
{School of Civil and Environmental Engineering, Hollister Hall, Cornell University,
Ithaca, NY 14853-3501, US
{Swiss Reinsurance Company, 1-5-1 Otemachi, Chiyoda-ku, Tokyo, 100-0004, Japan
(Received 13 April 2005; accepted in revised form 8 September 2005)
Earthquakes are low probability-high consequence events, regional earthquake miti-
gation is therefore a risky investment. Despite its importance, the risk-return tradeoff is
often not examined explicitly in regional earthquake risk management resource allocation
decisions. This paper introduces a stochastic optimization model developed to help
decision-makers understand the risk-return tradeoff in regional earthquake risk
mitigation, and to help state and local governments comply with the Disaster Mitigation
Act of 2000 requirement that they develop a mitigation plan. Taking advantage of the
special structure of the optimization, Dantzig-Wolfe decomposition is used as the solution
method. A case study for Central and Eastern Los Angeles illustrates an application of
the model. Results include a graph of the tradeoff between risk and return, quantification
of the relative contributions of each possible earthquake scenario, and discussion of the
effect of risk aversion on the selection of mitigation alternatives.
Keywords: Earthquakes; Optimization; Risk management; Resource allocation; Cost-
benefit analysis
1. Introduction
Earthquake mitigation analysis involves deciding: (1) how
much to spend on pre-event mitigation that aims to reduce
future earthquake losses versus post-event reconstruction
that aims to clean up after they occur, and (2) which of the
many possible mitigation alternatives to fund. This is an
investment problem in which one invests in mitigation
efforts (e.g. structural or non-structural upgrading of
certain types of structures in certain areas) at some cost,
and receives an uncertain return in the form of avoided
losses in the event of future earthquakes. The uncertainty
depends on which earthquakes occur in the future and
when. The problem is difficult in part because of the need to
tradeoff between the competing objectives of maximizing
the expected return on the investment and minimizing the
risk involved. While this tradeoff is true in any investment
situation, it is especially important in the case of investing
to mitigate earthquake losses because they are low
probability-high consequence events. There is a significant
earthquake risk-related benefit if a large earthquake occurs,
but there is none if no earthquake occurs (although there
may be other benefits, such as psychological benefits to
feeling safer or a reduction in vulnerability to other
hazards).
Despite its importance, the risk-return tradeoff often is
not systematically considered in earthquake mitigation
analysis. Ideally, all possible earthquakes with their
associated probabilities of occurrence would be considered
in estimating the benefits of possible mitigation invest-
ments. Almost all past studies, however, have calculated
benefits as those that would be realized if a particular
earthquake scenario occurred (e.g. Sarin 1983, Seligson
et al. 1998, Shah et al. 1992), or if the annual expected
ground shaking occurred (e.g. FEMA 1992, 1994, Altay
et al. 2002), because they are easier to calculate. Basing the
*Corresponding author. Email: [email protected]
Structure and Infrastructure Engineering, Vol. 3, No. 2, June 2007, 133 – 146
Structure and Infrastructure EngineeringISSN 1573-2479 print/ISSN 1744-8980 online ª 2007 Taylor & Francis
http://www.tandf.co.uk/journalsDOI: 10.1080/15732470600591083
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uth
Car
olin
a ]
at 0
1:13
06
Oct
ober
201
3

benefit estimates on one, or even a few, scenarios is not
adequate, because what is an optimal investment strategy
for one earthquake is not necessarily optimal for all
earthquakes, and in fact can be completely ineffective
for other earthquakes, as demonstrated in Dodo et al.
(2005). Using the annual expected ground shaking is better
because it considers all possible earthquakes, but it does
not account for the spatial correlation among the benefits
associated with spatially distributed mitigation alternatives,
and therefore it does not consider the huge variability in
investment benefits. It assumes that a small loss (and
therefore mitigation benefit) occurs every year, whereas, in
reality, most years there will be no loss, but occasionally
there will be a very large loss.
This paper describes a new stochastic program developed
to support systematic regional earthquake mitigation
analysis with a specific focus on the risk-return tradeoff.
The variability in annual earthquake loss (and therefore net
benefit of mitigation investments) is explicitly modeled and
traded off with return on investment. The model was
developed with a focus on earthquakes and a regional
(e.g. metropolitan area) public sector perspective, but the
method could be adapted to other hazards and risk
management perspectives (e.g. insurance industry). This
work builds on that presented in Dodo et al. (2005). While
the model in Dodo et al. (2005) is similar in its definition of
mitigation alternatives and data sources, that model is a
linear program that focuses only on the expected value of
benefits. The stochastic program presented in this paper
makes the important extension to consider the variability in
benefits. The next section introduces relevant background
in resource allocation for natural disaster risk management.
Potential users and uses of the model are discussed,
followed by the model formulation and solution procedure,
and a case study application of the model for Eastern and
Central Los Angeles. The paper concludes with a discussion
of the model’s limitations and strengths.
2. Resource allocation for natural disaster risk management
Previous work relating to resource allocation for natural
disaster risk management can be grouped into four main
areas: (1) deterministic net present value (NPV) analysis,
(2) stochastic NPV analysis, (3) multi-attribute utility
models, and (4) optimization models. One of the key
dimensions used to distinguish studies is the way they
address the uncertainty related to earthquake (or other
hazard) occurrence. Only those studies categorized as
stochastic NPV studies recognize that in real life, future
benefits of mitigation investment are stochastic, and a
decision-maker may be interested not only in the expected
benefit, but the variability of benefits as well. Because
earthquakes are low probability-high consequence events,
the probability distribution of a NPV for earthquake
investments has a large variance. There is a small
probability that a major earthquake will occur and large
losses will be avoided, and a large probability that no
earthquake will occur, resulting in no investment benefit.
Therefore, risk managers probably do not want to make
decisions based solely on expected values.
Few stochastic NPV studies could be found in the
literature. Englehardt and Peng (1996) estimated the
probability distribution of benefits associated with revising
the hurricane requirements in a South Florida building
code, and compared it with the cost of implementing the
revision. Bernknopf et al. (2001) applied a stochastic NPV
analysis to lateral-spread ground failure in Watsonville,
CA, assuming the 1989 Loma Prieta earthquake may or
may not occur again. They compared two mitigation
alternatives: to mitigate all properties in a particular land
use class, or all properties in a particular hazard class. The
two alternatives were compared based on the mean and
variance of the NPV. Taylor and Werner (1995), Werner
et al. (1999), and Werner et al. (2002) compare various
levels of proposed seismic design or upgrade for port
facilities in California based on both means and standard
deviations of losses. Mostafa and Grigoriu (2002) examined
the benefits of adding bracing elements to the water tank in
a New York City hospital. One thousand seismic events
were generated stochastically, and the distributions of
losses with and without mitigation were compared.
The authors are aware of only one example in which
stochastic analysis was used in an optimization approach
for resource allocation for natural disaster risk manage-
ment. Researchers at the International Institute for
Applied Systems Analysis (IIASA) developed a simulation-
optimization approach to select the insurance policy design
(e.g. insurance premiums) that best satisfies stated decision
criteria, such as maximizing insurance company profits and
minimizing the probability of insurance company insol-
vency (Ermoliev et al. 2000). The problem they address is
heavily focused on financial instruments, and their for-
mulation yields an intractable analytical structure for the
objective. They rely, therefore on simulation for their
analysis. Our model centers on mitigation decisions and a
public decision-making perspective. This yields a very
different model formulation, one with a much closer tie
to regional loss estimation methodologies. The structure of
this model makes it amenable to analytic analysis.
3. Potential model users and uses
The stochastic program presented in this paper was
developed with a local (e.g. county) public sector perspec-
tive because mitigation is largely a local issue (Prater and
Lindell 2000). Although the mitigation planning process
involves complicated interactions among multiple layers of
government, local governments play a key role since most
134 N. Xu et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uth
Car
olin
a ]
at 0
1:13
06
Oct
ober
201
3

infrastructure is controlled by local governments, residents,
and businesses (not the state or federal government) and
regulations governing land use and construction practices
are established at the local level (Prater and Lindell 2000).
As with most computer models, this optimization model
does not capture all the complexities of the social, political,
economic, and cultural context in which resource allocation
decisions are actually made. Nevertheless, it should provide
useful input to support the mitigation planning process.
Running the model under different assumptions could help
decision-makers understand how the many relevant factors
(e.g. distribution of earthquake ground shaking, structural
vulnerability, objectives, mitigation alternative costs, risk
attitudes) interact to determine the relative appeal of different
mitigation strategies. The model’s solutions can also provide
insight into which strategy is optimal for a given community.
In addition to general earthquake risk reduction resource
allocation support, the model aims to help local and state
risk managers undertake a few specific mitigation planning
tasks. The Disaster Mitigation Act of 2000 now requires
that to be eligible for Hazard Mitigation Grant Program
(HMGP) funds, each state and local government must
submit a mitigation plan to the Federal Emergency
Management Agency (FEMA) describing how it is
prioritizing mitigation actions so that its overall mitigation
strategy is cost-effective and maximizes overall wealth
(FEMA 2002, 2003). The model could provide guidance as
governments respond to this mandate. After an earth-
quake, many applications for HMGP grants are submitted,
and need to be evaluated quickly and rationally. By
systematically comparing regional strategies (e.g. upgrade
all unreinforced masonry buildings in a census tract), the
model can help streamline administration of the HMGP by
providing a mechanism for ‘block grant’ approval, just as
the RAMP program did after the 1994 Northridge earth-
quake (Seligson et al. 1998). The Small Business
Administration’s Pre-Disaster Mitigation Loan Program
makes low-interest, fixed-rate loans to small businesses so
they can implement mitigation measures. To be eligible, the
business must ‘conform to the priorities and goals of the
mitigation plan for the community, as defined by FEMA,
in which the business is located’ (US SBA 2003). The model
could help the local or state mitigation official decide which
applications to approve.
4. Model formulation
4.1 Scope
The model was designed to be compatible with HAZUS,
the Federal Emergency Management Agency’s publicly-
available, standardized national loss estimation modeling
software, so that HAZUS could be used to calculate
regional earthquake losses (benefits of investment) when
necessary (FEMA 1999). The mitigation alternatives
considered in the model are structural upgrading policies
for groups of buildings. Buildings are grouped into
categories based on their census tract locations, structural
types (e.g. mid-rise steel braced frame, low-rise concrete
shear wall), occupancy types (e.g. single-family dwelling,
hospital), and design levels (i.e. built to a low, moderate, or
high seismic code). One mitigation alternative considered is
to upgrade some square footage of buildings of a particular
structural and occupancy type in a census tract from one
design level to another. The set of mitigation alternatives
considered is created by all possible combinations of
structural types, occupancy types, census tracts, and design
levels. In reality, it is possible to mitigate a single structure
in many ways. There are other possible combinations of
structures that could be mitigated, instead of buildings in
a census tract. The unit of census tract is used because it is
the smallest one available in HAZUS (FEMA 1999), but
another area unit, such as block group, could be used
without altering the model formulation. Square footage was
chosen as the metric of study because HAZUS uses square
footage (FEMA 1999), not the number of buildings, to
calculate loss. From a computational perspective, modeling
the decision variables as continuous variables (square
footage) instead of integers (number of buildings) produces
a much simpler and more appropriate optimization for the
level of data which is available for a regional planning
investment analysis. There are also many non-structural
mitigation alternatives, such as land use planning or buying
insurance. This model does not currently allow these types of
alternatives, though they could be incorporated. Except
mitigation costs, all input for the model can be obtained
from any regional loss estimation model, such as HAZUS.
In the next section, the definition of risk used in this study is
presented, and in the subsequent section, the equations that
make up the stochastic program are developed.
4.2 Measuring risk
Bawa (1975) and Fishburn (1977) discuss ‘downside risk’
in the context of a financial investment portfolio. They
measure risk as a lower partial moment (LPM) of order brelative to the minimum acceptable rate of return, a,defined as follows:
LPMbða;RÞ ¼Z a
�1ða� RÞb dFðRÞ; ð1Þ
where F(R) is the cumulative distribution function of the
uncertain rate of return, R. The key point is the focus on a
‘one-sided’ risk measure rather than on variance. In this
earthquake risk management problem, we want to avoid
the possibility of experiencing losses that exceed some
allowable threshold value, defined such that earthquake
loss less than that level is viewed as within the regional
Risk-return tradeoff in mitigation 135
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uth
Car
olin
a ]
at 0
1:13
06
Oct
ober
201
3

capacity to manage it, and loss greater than that level is
not. At the same time, we want to achieve a solution that is
good in an expected value sense. To accomplish this, we
develop a variation on the idea described by Bawa (1975)
and Fishburn (1977) that focuses on an ‘upper partial
moment’ of order 1, i.e. the partial expectation of loss
above the threshold value (see figure 1). We define risk in
this problem as the present value of E, the expected loss
beyond what is considered to be manageable:
E ¼Xl
Plbl; ð2Þ
where Pl is the per-period probability of earthquake l and bl
is the excess reconstruction cost for earthquake l, the dollar
amount of the loss beyond the threshold allowable loss.
This concept of including risk minimization as an
objective by penalizing solutions that can yield losses
exceeding some fixed target has been adapted for use in a
variety of application areas, including energy systems
design (Malcolm and Zenios 1994), capacity expansion in
telecommunications (Laguna 1998), production planning
(Paraskevopoulos et al. 1991), aircraft scheduling (Mulvey
and Ruszczynski 1995, Mulvey et al. 1995), freight
transportation (List et al. 2003), and electric power
(Carvalho and Ferreira 2000).
4.3 Formulation development
In each time period (e.g. year), we assume that any one of L
earthquakes could occur. If we consider the planning
horizon to be T periods, there are (Lþ 1)T scenarios that
could occur over the T periods, and it is possible to
determine occurrence probabilities for each of them. We
could directly incorporate each of these scenarios into the
optimization and produce a stochastic program that is
mathematically equivalent to a deterministic optimization.
However, the formulation can be simplified if we make the
following reasonable assumptions. First, we assume that
the per-period probability of each earthquake occurring
remains constant from period to period. The per-period
probability of each earthquake occurring in the future is
therefore independent of which earthquakes have occurred
in the past. Second, we assume that if some building area
sustains earthquake damage, it is repaired to its pre-
earthquake seismic design level. Any improvement beyond
that level is considered to be mitigation, and the cost is
determined by how much it is mitigated. That is, there is no
discount for mitigating in conjunction with earthquake
repair. Because of these two assumptions, in deciding which
building area to mitigate in a particular time period, we can
disregard what happened before that time period. We do
need to consider the design code level of all the building
area in the inventory at that time period, but it is not
necessary to consider the evolution that brought about that
condition prior to determining what to mitigate in that
particular period. Rather than considering the (Lþ 1)T
scenarios for the stochastic program then, the problem
effectively reduces to only having to consider which, if any,
earthquake occurs in a given time step.
Let vckijt be the square footage of buildings during time t
that are in census tract k that are of structural type i and
occupancy type j designed to seismic code c. To simplify the
notation, we define m as a class of buildings in census tract
k that are of structural type i and occupancy type j.
Without loss of generality, vckijt then becomes vcmt. Once an
earthquake l occurs, the building area in damage state d
that was designed to seismic code c is given by aldcm vcmt,
where aldcm is the proportion of building area in class m that
was designed to seismic code c, and enters damage state d
if earthquake l happens. The assumption that after an
earthquake, the building area must be repaired to its
pre-earthquake level is represented by the equation:
aldcm vcmt ¼ yldcmt 8m;t;l;d;c; ð3Þ
where yldcmt is the square footage in class m that was in
condition c prior to an earthquake l, enters damage state d
as a result of the earthquake, and is repaired to seismic code
c during time period t. The event that no earthquake
occurred can be represented as an earthquake for which all
buildings are in the damage state ‘no damage’.
A key decision to be made in each time period is which
building area should be mitigated to a higher seismic design
level. This decision can be represented by the following
equations:
xcm;t�1 ¼Xc 0
z cc0
mt 8m;t;c; ð4Þ
z cc0
mt ¼ 0 8m;c > c 0; ð5Þ
where xcm;t�1 is the square footage of buildings in class m at
the end of period t7 1 that are designed to seismic code c;
and z cc0
mt is the square footage of buildings in class m
that were in seismic design code c at the end of period t7 1
and were mitigated to seismic code c0 at the beginning ofFigure 1. Measure of one-sided downside risk.
136 N. Xu et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uth
Car
olin
a ]
at 0
1:13
06
Oct
ober
201
3

period t. Mitigation has occurred only when c04 c. If c0 ¼ c,
no mitigation has occurred, but the square footage is
conserved at zero mitigation cost. The following relation-
ship must hold between the z and n variables:
v c0
mt ¼Xc
z cc0
mt 8m;t;c 0: ð6Þ
Equation (6) requires that the square footage in building
class m in time period t designed to seismic code c0 equals
the square footage that has been mitigated to that seismic
code during t. The square footage of buildings in class m at
the end of period t that are designed to seismic code c is
then given by:
xcmt ¼ vcmt 8m;t;c: ð7Þ
Finally, the desire to guard against scenarios that would
produce losses greater than a specified allowable threshold
level is represented by the following constraint:Xm
Xd
Xc
Rdcmty
ldcmt � blt � Bt 8l;t; ð8Þ
where Rdcmt is the per square foot reconstruction cost for
building area in class m that enters damage state d and is
repaired to code c during period t; Bt is the allowable loss in
period t, the dollar loss that is considered manageable in
period t; and blt is the excess reconstruction cost for
earthquake l and period t, the dollar amount of the loss
beyond this allowable loss threshold in period t. The
following non-negativity requirements must also hold:
blt � 0 8l;t; ð9Þ
xcmt;vcmt � 0 8m;t;c; ð10Þ
z cc0
mt � 0 8m;t;c;c 0; ð11Þ
yldcmt � 0 8m;t;l;d;c: ð12Þ
We can now develop a multi-objective optimization
formulation in which the tradeoff between two objectives is
represented with a weight k. One objective is to minimize
the present value of the sum of the mitigation investment
and the expected reconstruction expenditures. The second
objective is to minimize the present value of the risk, as
defined in equation (2). The objective function is as follows:
minXt
1
1þ rð Þt�1
�Xm
Xc
Xc 0
Fcc 0
mt zcc 0
mt
þXm
Xc
Xl
Xd
PlRdcmty
ldcmt þ k
Xl
Plblt
�; ð13Þ
where k� 0 is the weight for the risk-based objective; Fcc 0
mt is
the per square foot cost to upgrade building area in class m
from seismic code c to code c0 in time period t; and r is an
interest rate per period used to discount cash flows to the
present value. A higher value of k represents more risk
aversion. The final optimization model is a linear program
in which the objective is given in equation (13) and the
constraints are given in equations (3) – (12). The model
results indicate what the total mitigation and expected post-
earthquake reconstruction costs will be, as well as the risk
associated with the mitigation strategy, in terms of the
expected excess reconstruction cost over all possible earth-
quakes during the time horizon.
The optimization model requires seven key inputs:
(1) xcm0, the inventory at time 0; (2) aldcm , the proportion of
building area in class m that was designed to seismic code c
and enters damage state d after an earthquake l; (3) Rdcmt, the
per square foot reconstruction cost for building area in
class m that enters damage state d and is repaired to code c
during period t; (4) Fcc 0
mt , the per square foot cost to upgrade
the building area in class m from seismic code c to code c0 in
period t; (5) Pl, the per-period probability of earthquake l;
(6) Bt, the user-defined allowable loss in each period t; and
(7) k, the user-defined weight used to tradeoff between the
two objectives. Items 1 to 3 can be obtained from any
regional loss estimation model. For items 6 and 7, it may be
difficult to define ‘the’ values of allowable loss and risk
aversion weight that represent a community’s interests. It
can be valuable, nonetheless, to run the analyses with
several possible values of allowable loss and risk aversion
weights, and examine the effects of these variables on the
recommended mitigation plan.
5. Model simplification
Realistic applications of this formulation include a very
large number of decision variables. For example, the case
study described in this paper, which focuses on 86 square
miles in the City of Los Angeles, yields a formulation with
over 11.1 million variables (after some substitution). Any
reduction in the size of the formulation, is therefore
helpful in making the model more useful for real-life
applications. It turns out that with two reasonable
assumptions, it can be shown that mitigation expenditures
are made only in the first period, which implies that the
formulation can be reduced to a one-period problem in
which the benefits and costs that stem from those
investments are calculated over the planning horizon. This
simplification dramatically reduces the computation re-
quired to solve the model. The assumptions are: (1) that
mitigating from low to medium code, then from medium
to high code is at least as expensive as mitigating directly
from low to high code (the condition is more general if
there are more than three code levels); and (2) that all
mitigation and reconstruction cost coefficients are
stationary (i.e. do not change over time). The theorem
connecting these assumptions to a one-period model
Risk-return tradeoff in mitigation 137
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uth
Car
olin
a ]
at 0
1:13
06
Oct
ober
201
3

formulation is proved in Appendix I. The resulting
simplified model formulation is presented in this section.
Equation (14) links the initial square footage in class m
that was designed to seismic code c to the mitigation
decisions for that class and initial seismic design code.
Equation (15) calculates bl, the reconstruction cost in excess
of the allowable loss for each potential earthquake l. The
first term on the left side is the reconstruction cost if
earthquake l occurs, given the mitigation decisions that
have been made. Mitigation can only improve the seismic
design code of a building, so equation (16) must hold. The
non-negativity requirements in equations (17) and (18)
must also hold:
xcm ¼Xc 0
z cc0
m 8m;c; ð14Þ
Xm;c 0;d
Rdc 0
m aldc0
m
Xc
z cc0
m � bl � B 8l; ð15Þ
z cc0
m ¼ 0 8m; c > c 0; ð16Þ
bl � 0 8l; ð17Þ
z cc0
m � 0 8m;c;c 0: ð18Þ
The objective function in equation (13) can now be
simplified as follows:
minXm
Xc
Xc 0
Fcc 0
m þXl
Xd
dPlaldc0
m Rdc 0
m
!z cc
0
m
þ kdXl
Plbl; ð19Þ
where d ¼ 1þrr
�1�
�1
1þr�T�
and T is the number of periods
in the planning horizon. The other variables in equations
(14) – (19) are the same as defined previously, but without
the time index. These simplifications drastically reduce the
size of the formulation. Considering again the case study in
this paper, the simplified formulation has only 369,000
variables, compared to over 11.1 million variables in the
original formulation.
6. Dantzig-Wolfe solution procedure
Even the one-period model formulation can lead to very
large problems in realistic instances. An analysis for the
entire City of Los Angeles, for example, requires 2.2 million
variables in the simplified formulation (65 million in the
original version). However, the formulation has a special
structure that can be exploited to create an efficient solution
procedure. Notice that if equation (15) were removed, the
formulation would decompose into m*c independent linear
programs. This circumstance suggests that a Dantzig-Wolfe
decomposition (Bertsimas and Tsitsiklis 1977) is an
appropriate solution procedure. The idea of a Dantzig-
Wolfe decomposition is that rather than representing the
impact of each of these independent linear programs on the
optimization through the constraints, as in the formulation
above, one can explicitly use the set of extreme points to
define the feasible region generated by the constraints.
Since the feasible region of a bounded linear program is a
convex set, any feasible point can be represented as a
convex combination of the extreme points in that set. For
the purposes of this discussion, we assume the feasible
region is bounded because our formulation is bounded and
hence, we need not consider extreme directions.
A Dantzig-Wolfe decomposition specifies the use of a
master problem and a series of sub-problems. There is one
sub-problem for each class m and initial seismic design
code c. The master problem is comprised of the linking
constraints and a collection of additional variables that
represent a subset of the extreme points of each of the sub-
problems. At each iteration, a new extreme point is
generated for each of the sub-problems and these are
added to the master problem. The algorithm terminates
when the optimal solution has been identified. That optimal
solution is expressed as a convex combination of the
extreme points that satisfy the linking constraints.
The algorithm is described in the following five steps.
First, for all m and c, let z1ccm ¼ xcm, and for all c0 6¼ c let
z1cc0
m ¼ 0. This initial solution for each of the sub-problems
corresponds to no mitigation. The notation zncc0
m is the nth
solution to the sub-problem of how to optimally mitigate
the square footage in class m with initial seismic code c.
Second, at iteration n, there are n extreme points
zhcc0
m : 8m;c;c 0�
for h¼ 1, . . . , n. Solve the following
restricted master program to obtain the optimal yh for
h¼ 1, . . . , n and to obtain the dual prices pl correspondingto constraint (21) and r corresponding to constraint (22):
minXnh¼1
Xm
Xc
Xc 0
Fcc 0
m þXl
Xd
dPlaldc0
m Rdc 0
m
!zhcc
0
m yh
þ kdXl
Plbl; ð20Þ
subject to:Xnh¼1
Xm
Xc
Xc 0
Xd
aldc0
m Rdc 0
m zhcc0
m yh � bl � B 8l;
ð21Þ
Xnh¼1
yh ¼ 1; ð22Þ
bl � 0 8l; ð23Þ
yh � 0 8h: ð24Þ
138 N. Xu et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uth
Car
olin
a ]
at 0
1:13
06
Oct
ober
201
3
The mitigation strategy recommended by the master
problem at the nth iteration is then a convex combination
of the mitigation decisions identified in each of the n
iterations for each sub-problem where the weights for that
combination are given by yh. Third, for each class m and
initial seismic code c, find c0 � c to minimize
Fcc 0
m þP
d
Pl dPl � pl� �
aldc0
m Rdc 0
m . Assume that c� achieves
the minimum. Fourth, define a new extreme point of
equations (14), (16) and (18) as follows: znþ1;cc�m ¼ xcm and
znþ1;cc0
m ¼ 0 for c 0 6¼ c�, 8m;c;c 0. It is important to remember
that c� is defined for each class m and initial seismic code c.
We have suppressed the notion that c� is a function of m
and c to simplify the discussion. Fifth, if the following is
true,
Xm
Xc
F cc�m þ
Xd
Xl
dPl � pl� �
aldc�m Rdc�m
!xcm � r; ð25Þ
the optimal solution found on the previous iteration of the
restricted master problem is the optimal for the problem.
That solution is given byPn
k¼1 zhcc 0
m yh. If this condition is
not true, the solutions to the sub-problems that have just
been identified and are given by znþ1;cc0
m 8m;c;c 0, are added
to the restricted master problem and the process continues
by returning to step 2. Note that the objective value of the
restricted master program is non-increasing at each
iteration and that each of these solutions is a feasible
solution to the original optimization. In practice, the
termination criteria used for Dantzig-Wolfe are: (1) the
optimality condition that is given by equation (25) for this
formulation; (2) a specified maximum number of iterations;
or (3) the condition that the value of the left side of the
optimality condition is less than r, but by what is deemed
to be a very small amount.
7. Case study
7.1 Scope
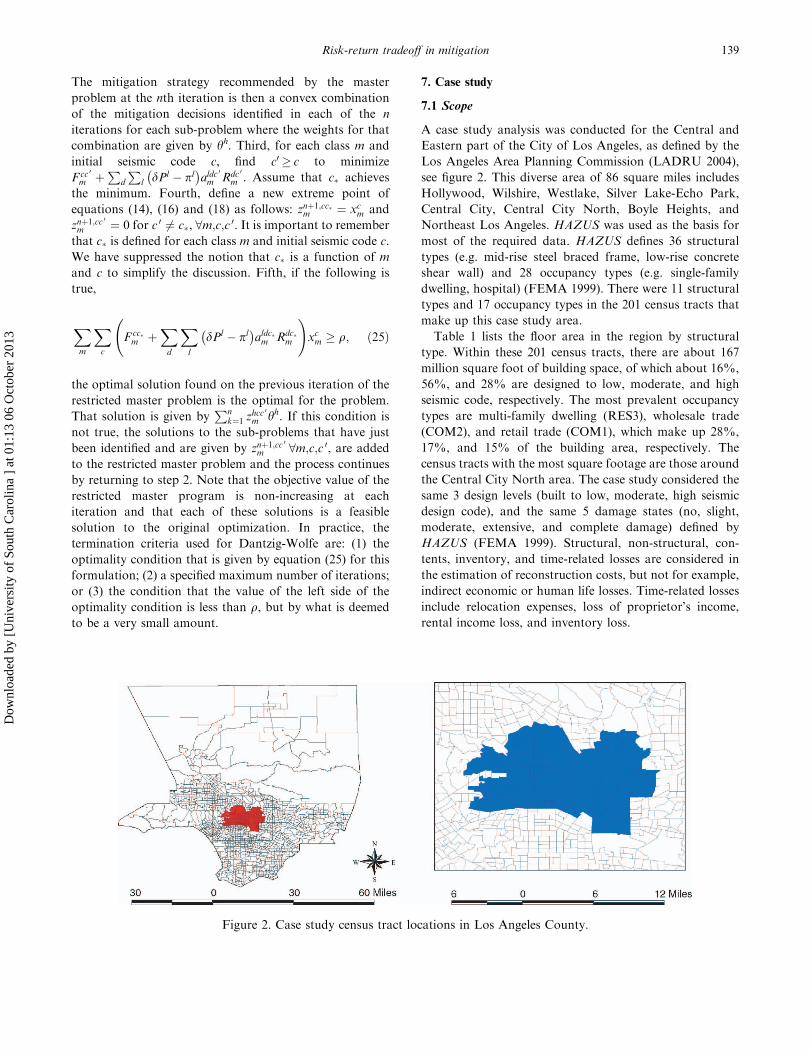
A case study analysis was conducted for the Central and
Eastern part of the City of Los Angeles, as defined by the
Los Angeles Area Planning Commission (LADRU 2004),
see figure 2. This diverse area of 86 square miles includes
Hollywood, Wilshire, Westlake, Silver Lake-Echo Park,
Central City, Central City North, Boyle Heights, and
Northeast Los Angeles. HAZUS was used as the basis for
most of the required data. HAZUS defines 36 structural
types (e.g. mid-rise steel braced frame, low-rise concrete
shear wall) and 28 occupancy types (e.g. single-family
dwelling, hospital) (FEMA 1999). There were 11 structural
types and 17 occupancy types in the 201 census tracts that
make up this case study area.
Table 1 lists the floor area in the region by structural
type. Within these 201 census tracts, there are about 167
million square foot of building space, of which about 16%,
56%, and 28% are designed to low, moderate, and high
seismic code, respectively. The most prevalent occupancy
types are multi-family dwelling (RES3), wholesale trade
(COM2), and retail trade (COM1), which make up 28%,
17%, and 15% of the building area, respectively. The
census tracts with the most square footage are those around
the Central City North area. The case study considered the
same 3 design levels (built to low, moderate, high seismic
design code), and the same 5 damage states (no, slight,
moderate, extensive, and complete damage) defined by
HAZUS (FEMA 1999). Structural, non-structural, con-
tents, inventory, and time-related losses are considered in
the estimation of reconstruction costs, but not for example,
indirect economic or human life losses. Time-related losses
include relocation expenses, loss of proprietor’s income,
rental income loss, and inventory loss.
Figure 2. Case study census tract locations in Los Angeles County.
Risk-return tradeoff in mitigation 139
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uth
Car
olin
a ]
at 0
1:13
06
Oct
ober
201
3
7.2 Input data
In the case study analysis, the regional seismicity was
assumed to be represented by the set of 47 earthquake
scenarios identified by Chang et al. (2000) for a risk
analysis of the highway network in Los Angeles and
Orange Counties. The analysis thus assumes that only those
47 earthquakes are possible, each with an associated annual
‘hazard-consistent’ probability of occurrence, such that
together they approximate the regional seismicity. The
‘hazard-consistent’ probability of a particular earthquake
scenario represents the likelihood of earthquakes like that
scenario occurring, where ‘earthquakes like that scenario’
are similar in terms of severity and spatial distribution of
ground motion they cause (Chang et al. 2000). In this way,
all earthquakes are considered.
It was assumed that the time step is 1 year, the valuation
period is 30 years, the annual interest rate is 2%, and the
allowable loss is B¼ $1 billion. The analysis was conducted
for many values of the risk aversion weight, k. The case
study uses HAZUS default inventory data, which is from
1994 (FEMA 1999). The mitigation costs (Fcc 0
mt ) and
reconstruction costs (based on adcm and Rdcc 0
mt ) were estimated
based on information from HAZUS data tables and
simulation results, as described in Dodo et al. (2005).
Mitigation and reconstruction costs are estimated for the
year 2003.
7.3 Case study results
The solution algorithm was programmed in C. The
optimization model results can provide a risk manager
with guidance on specific earthquake risk resource alloca-
tion decisions, such as those described in the Potential
Model Users and Uses section, and can also help him or
her gain general insight into the risk-return tradeoff.
The results can be used to answer many questions,
including: (1) How do expected expenditures vary with
risk attitude? (2) What is the relative contribution of the
different possible earthquakes to exceeding allowable loss?
(3) Does the recommended mitigation strategy vary with
risk attitude? These questions are examined for the case
study analysis in turn in the following sections.
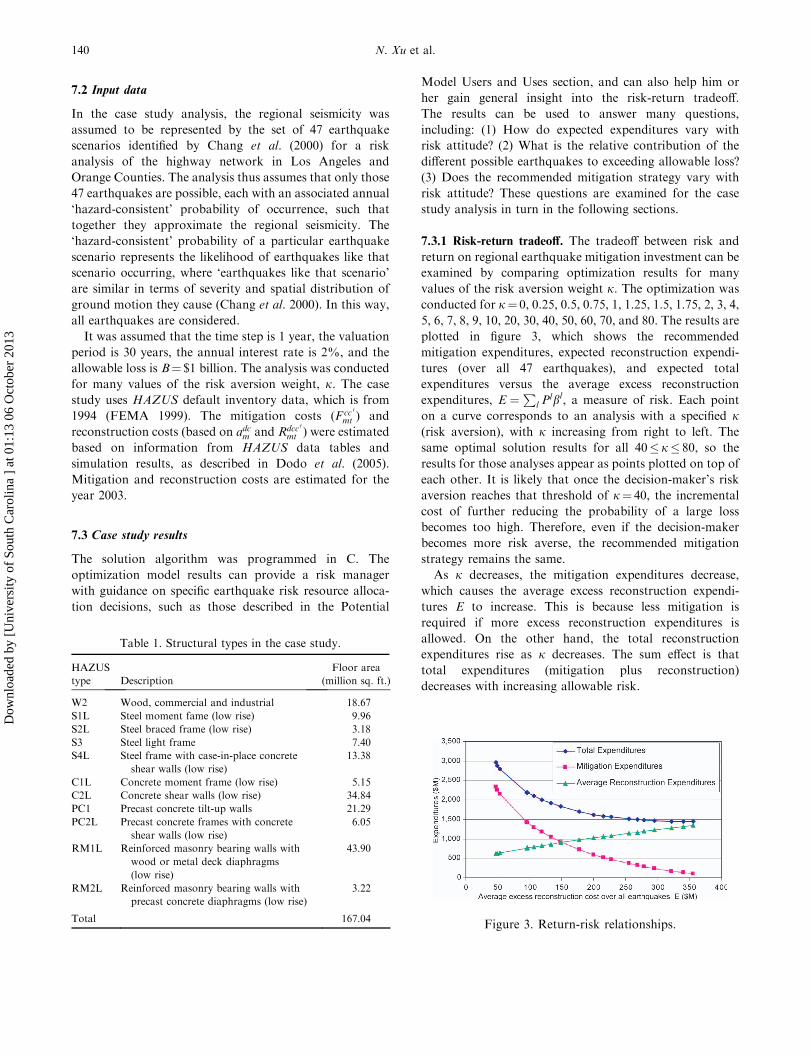
7.3.1 Risk-return tradeoff. The tradeoff between risk and
return on regional earthquake mitigation investment can be
examined by comparing optimization results for many
values of the risk aversion weight k. The optimization was
conducted for k¼ 0, 0.25, 0.5, 0.75, 1, 1.25, 1.5, 1.75, 2, 3, 4,
5, 6, 7, 8, 9, 10, 20, 30, 40, 50, 60, 70, and 80. The results are
plotted in figure 3, which shows the recommended
mitigation expenditures, expected reconstruction expendi-
tures (over all 47 earthquakes), and expected total
expenditures versus the average excess reconstruction
expenditures, E ¼P
l Plbl, a measure of risk. Each point
on a curve corresponds to an analysis with a specified k(risk aversion), with k increasing from right to left. The
same optimal solution results for all 40� k� 80, so the
results for those analyses appear as points plotted on top of
each other. It is likely that once the decision-maker’s risk
aversion reaches that threshold of k¼ 40, the incremental
cost of further reducing the probability of a large loss
becomes too high. Therefore, even if the decision-maker
becomes more risk averse, the recommended mitigation
strategy remains the same.
As k decreases, the mitigation expenditures decrease,
which causes the average excess reconstruction expendi-
tures E to increase. This is because less mitigation is
required if more excess reconstruction expenditures is
allowed. On the other hand, the total reconstruction
expenditures rise as k decreases. The sum effect is that
total expenditures (mitigation plus reconstruction)
decreases with increasing allowable risk.
Table 1. Structural types in the case study.
HAZUS
type Description
Floor area
(million sq. ft.)
W2 Wood, commercial and industrial 18.67
S1L Steel moment fame (low rise) 9.96
S2L Steel braced frame (low rise) 3.18
S3 Steel light frame 7.40
S4L Steel frame with case-in-place concrete
shear walls (low rise)
13.38
C1L Concrete moment frame (low rise) 5.15
C2L Concrete shear walls (low rise) 34.84
PC1 Precast concrete tilt-up walls 21.29
PC2L Precast concrete frames with concrete
shear walls (low rise)
6.05
RM1L Reinforced masonry bearing walls with
wood or metal deck diaphragms
(low rise)
43.90
RM2L Reinforced masonry bearing walls with
precast concrete diaphragms (low rise)
3.22
Total 167.04Figure 3. Return-risk relationships.
140 N. Xu et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uth
Car
olin
a ]
at 0
1:13
06
Oct
ober
201
3
In addition to the average expenditures over all earth-
quakes shown in figure 3, the analysis allows comparison of
the probability distributions of losses under different risk
attitudes. Figure 4 shows the cumulative distribution
functions of total expenditures for risk aversion weights
k¼ 0, k¼ 6, and k¼ 40. It shows that the three curves
intersect, indicating that none of the curves stochastically
dominates the others. The k¼ 0 curve, for example, is the
rightmost curve for total expenditures greater than $4.5
billion and the leftmost curve for total expenditures less
than $3 billion. That means that the probability of
experiencing total expenditures greater than $40 billion
(or other amount greater than $4.5 billion) is larger if k¼ 0
than if k is higher, but the probability of experiencing total
expenditures greater than $1 billion (or other amount less
than $3 billion) is smaller if k¼ 0 than if k is higher.
Presenting the same data another way, table 2 similarly
indicates a clear tradeoff between the average total
expenditures and the probability of a large loss. As the
probability of total expenditures exceeding $60 billion
decreases from 0.0026 to 0.0007, the average total
expenditures increases from $1.44 billion to $2.19 billion.
The cost of reducing the probability of a large cost is an
increase in expected total cost.
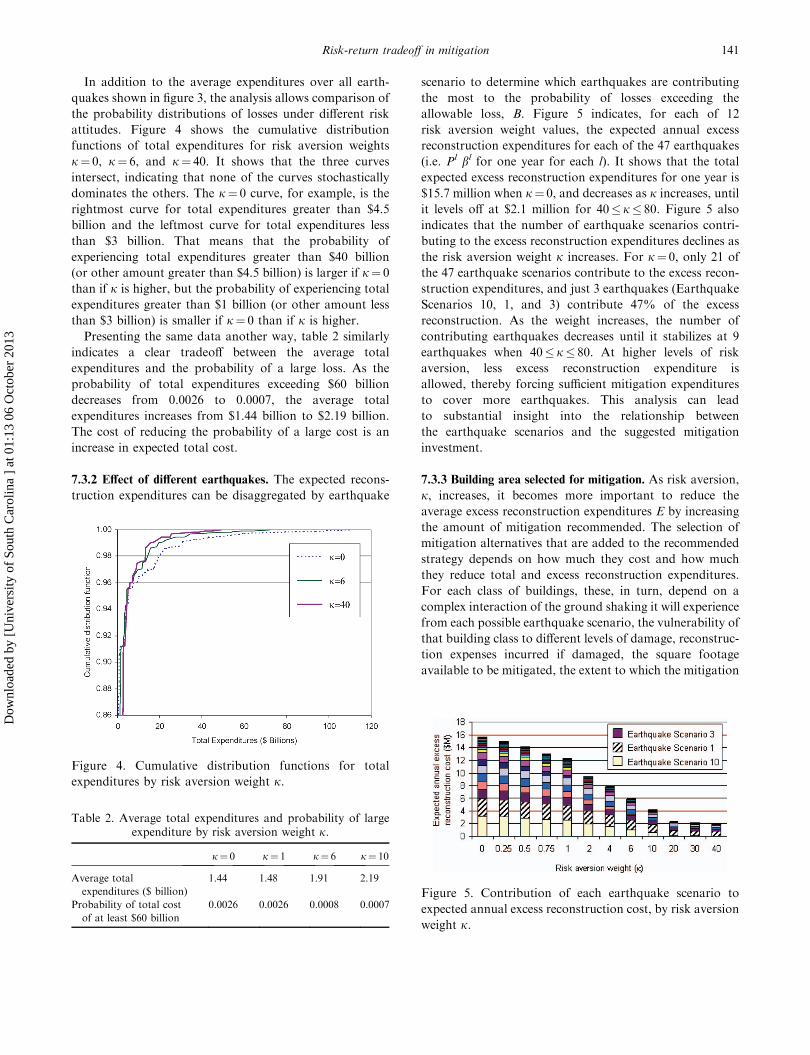
7.3.2 Effect of different earthquakes. The expected recons-
truction expenditures can be disaggregated by earthquake
scenario to determine which earthquakes are contributing
the most to the probability of losses exceeding the
allowable loss, B. Figure 5 indicates, for each of 12
risk aversion weight values, the expected annual excess
reconstruction expenditures for each of the 47 earthquakes
(i.e. Pl bl for one year for each l). It shows that the total
expected excess reconstruction expenditures for one year is
$15.7 million when k¼ 0, and decreases as k increases, until
it levels off at $2.1 million for 40�k� 80. Figure 5 also
indicates that the number of earthquake scenarios contri-
buting to the excess reconstruction expenditures declines as
the risk aversion weight k increases. For k¼ 0, only 21 of
the 47 earthquake scenarios contribute to the excess recon-
struction expenditures, and just 3 earthquakes (Earthquake
Scenarios 10, 1, and 3) contribute 47% of the excess
reconstruction. As the weight increases, the number of
contributing earthquakes decreases until it stabilizes at 9
earthquakes when 40� k� 80. At higher levels of risk
aversion, less excess reconstruction expenditure is
allowed, thereby forcing sufficient mitigation expenditures
to cover more earthquakes. This analysis can lead
to substantial insight into the relationship between
the earthquake scenarios and the suggested mitigation
investment.
7.3.3 Building area selected for mitigation. As risk aversion,
k, increases, it becomes more important to reduce the
average excess reconstruction expenditures E by increasing
the amount of mitigation recommended. The selection of
mitigation alternatives that are added to the recommended
strategy depends on how much they cost and how much
they reduce total and excess reconstruction expenditures.
For each class of buildings, these, in turn, depend on a
complex interaction of the ground shaking it will experience
from each possible earthquake scenario, the vulnerability of
that building class to different levels of damage, reconstruc-
tion expenses incurred if damaged, the square footage
available to be mitigated, the extent to which the mitigation
Figure 4. Cumulative distribution functions for total
expenditures by risk aversion weight k.
Table 2. Average total expenditures and probability of largeexpenditure by risk aversion weight k.
k¼ 0 k¼ 1 k¼ 6 k¼ 10
Average total
expenditures ($ billion)
1.44 1.48 1.91 2.19
Probability of total cost
of at least $60 billion
0.0026 0.0026 0.0008 0.0007Figure 5. Contribution of each earthquake scenario to
expected annual excess reconstruction cost, by risk aversion
weight k.
Risk-return tradeoff in mitigation 141
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uth
Car
olin
a ]
at 0
1:13
06
Oct
ober
201
3

would achieve a reduction in damage, and the cost to
mitigate. Each building area is described by a census tract,
structural type, and occupancy type. The structural type
and tract location govern the damage caused by a
particular earthquake, and in this model, the occupancy
type determines the mitigation and reconstruction costs.
Therefore, the interaction (which structural types appear in
which occupancy types and census tracts) is important.
Since each of these building area characteristics affect all
three terms in the objective function directly or indirectly,
the tradeoff between minimizing mitigation expenditures,
reconstruction expenditures, and excess reconstruction
expenditures is important as well.
Because of these interdependencies, it is difficult to
determine exactly what combination of these circumstances
leads to a particular mitigation alternative being recom-
mended or not. However, by disaggregating the results, it is
possible to gain some insight into the situation. In the case
study, for example, when k¼ 0, Earthquake Scenarios 10
and 1 contribute the most to the excess reconstruction
expenditures, $3.19 million (20%) and $2.70 million (17%)
respectively (see figure 5). If k was changed from zero to a
positive value, the objective of minimizing excess recon-
struction expenditures would become relatively more
important, and one would expect that the model would
therefore try to reduce the excess reconstruction expendi-
tures by adding the mitigation of building classes that are
especially affected by Earthquake Scenarios 10 and 1.
According to the model, in both Earthquake Scenarios 10
and 1, the annual probability of moderate, extensive, and
complete damage are all greatest for the steel light frame
(S3) structural type. It turns out that when k is changed
from 0 to at least 1.5, the greatest increase in mitigation
expenditures per square foot (mitigation expenditures
divided by initial square footage) occurs in the steel light
frame (S3) structural type. Steel light frame buildings also
have the lowest average mitigation expenditures ($11.4 per
square foot). Since the relatively high vulnerability of steel
light frame buildings is notable only for the higher damage
states (at least moderate), the risk aversion has to be
sufficient (at least k¼ 1.5) to make that mitigation
alternative the most appealing.
Similarly, by disaggregating the results, one can see that
if k is changed from 0 to a value between 1.5 and 5, the
entertainment and recreation (COM8) occupancy type
experiences the greatest increase in per square foot
mitigation expenditures. This is probably because COM8
has the second highest reconstruction cost ($230 per square
foot), and when k is increased, the reconstruction
cost becomes important in two different places in the
objective function, minimizing expected total and excess
reconstruction cost. The occupancy type with the highest
reconstruction cost has a much higher associated mitigation
cost, making it relatively less appealing. Nevertheless, while
the disaggregated results allow the user to understand some
of the driving forces in the selection of a recommended
mitigation strategy, because of the complex interaction of
many issues, it is difficult, if not impossible, to guess a priori
which mitigation alternatives the optimization will select
for funding given a specified k. The optimization is useful,
then, in combining all this information to support resource
allocation decisions.
8. Model limitations
While the optimization model is able to provide insight into
the risk-return tradeoff for situations like that in the case
study, it has several important limitations in its current
form. First, the model only considers structural upgrading
alternatives defined in a specific way. It is possible to
define other pre-earthquake risk management alter-
natives, such as, non-structural upgrading (e.g. retrofitting
suspended ceilings in all schools), or buying insurance. The
type or extent of structural upgrade could be redefined, so
that instead of using the low, moderate, high seismic code
levels in HAZUS, performance levels (e.g. immediate post-
earthquake functionality) or specific retrofit strategies
(e.g. add shear walls) are used. The mitigation alternatives
could be defined for specific buildings rather than whole
census tracts. Many of these variations could be incorpo-
rated into the model with only minor adjustments to its
formulation. The key is to make the set of mitigation
alternatives realistic for the decision-maker, while keeping
the total number of alternatives manageable and ensuring
that for each alternative, there is a way to simulate its
implementation in the regional loss estimation model in
order to estimate the associated effect on losses.
Second, the current formulation does not include a
budget constraint. While this model provides useful
information in the form of the optimal resource-
unconstrained mitigation alternatives, in real applications,
there probably will be a limited annual budget, and
the recommended mitigation strategy under those cir-
cumstances will probably be different. Including a
budget constraint, which significantly complicates the
model and solution procedure, is the subject of continuing
work.
Third, there are many benefits and costs associated with
structural upgrading investments that are not related to
earthquake risk, and therefore have not been considered.
For example, an earthquake mitigation effort may help
improve resistance against wind damage as well, or not
undertaking mitigation may have an added benefit of
keeping a historic building untouched.
Fourth, the results of the optimization are only as good
as the input data they rely on. Data on mitigation and
reconstruction costs, while mostly available from regional
loss estimation models, are generally not extremely
142 N. Xu et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uth
Car
olin
a ]
at 0
1:13
06
Oct
ober
201
3

accurate. Because of the difficulty in collecting data, in the
case study inventory data from 1994 (the default data in
HAZUS 1999) was used for a 2003 analysis. Improvements
in the quality of the required data would be valuable to this
type of regional earthquake mitigation analysis, as well as
to other earthquake risk analysis efforts. The concept of
representing regional seismicity with a subset of earthquake
scenarios and associated ‘hazard-consistent’ probabilities is
sound and appropriate for use with this optimization model
approach, and the Chang et al. (2000) method used in the
case study produces reasonable results. Nevertheless, the
Chang et al. (2000) method in particular does have
recognized shortcomings. It is somewhat subjective and
only partially consistent with probabilistic hazard analyses.
It is difficult to assess ‘hazard-consistent’ probabilities for
small events, and there are different possible performance
measures that can be used to guide the process (Chang et al.
2000). If the Chang et al. (2000) method is improved or
another, better method is developed to obtain a represen-
tative set of earthquakes, it could easily be substituted for
use with the optimization model.
Fifth, to simplify the analysis, the non-structural damage
state was assumed to be the same as the structural damage
state, and the built environment was assumed to remain
unchanged over time.
Sixth, in the case study, it was assumed that if some
building area sustains earthquake damage, it is repaired to
its pre-earthquake seismic design level. Any improvement
beyond that level is considered to be mitigation, and the
cost is determined by how much it is mitigated.
Finally, as with most computer models, this optimiza-
tion model does not capture all the complexities of the
social, political, economic, and cultural context in which
resource allocation decisions are actually made. It is
intended only to be a tool to support decision-making by
providing insight into the way many variables interact to
determine the relative appeal of various resource alloca-
tion alternatives. While local governments have to make
decisions about what risk management to support in the
interest of the entire community, there are also many
individual homeowners, business owners, and other
decentralized decision-makers making individual decisions
with varying degrees of risk aversion, constraints, and
priorities. Recognizing the importance of designing
mitigation policies that are ‘Pareto Optimal’, i.e. leave
no stakeholder worse off and make some better (Alesch
and Petak 2002a), and communicating risks to stake-
holders using their own frames of reference (Alesch and
Petak 2002b), an important area of future research is to
try to explicitly incorporate the perspectives of different
stakeholders into the model to see what an ‘optimal’
solution looks like from different points-of-view and
how they may be merged into a strategy with a broad
base of support.
9. Conclusions
This paper describes a new stochastic optimization model
developed to support systematic regional earthquake
mitigation analysis with special emphasis on the risk-return
tradeoff. There is large variability in the return on regional
earthquake mitigation investments because of the uncer-
tainty associated with earthquake occurrence. Nevertheless,
most regional mitigation resource allocations decisions do
not account for the variability explicitly, and instead are
based on the expected average annual return or on the
return given a particular earthquake occurs. This newmodel
is novel in directly accounting for the risk-return tradeoff,
and in particular, in doing so using an optimization-based
decision-making approach.
The case study analysis suggests a few general findings. As
the decision-maker’s risk aversion increases (represented in
the model by k), the mitigation expenditures increase, but the
expected reconstruction expenditures decrease. However, as kgets larger, successive reductions in the risk come at higher
and higher costs. As expected, there is also a clear tradeoff
between the probability of a large loss and the average total
expenditures. As the former decreases, the latter increases.
Acknowledgements
The authors would like to thank the National Science
Foundation (CMS-0196003 andCMS -00408577) for partial
financial support of this research. This support is gratefully
acknowledged, but the authors take sole responsibility for
the content of the paper.
References
Alesch, D. and Petak, W., Guidance for seismic safety advocates:
formulating and evaluating policy alternatives. In Promoting Seismic
Safety: Guidance for Advocates, MCEER-04-SP.02, edited by D. Alesch,
P. May, R. Olshansky, W. Petak and K. Tierney, 2002 (Multidisciplinary
Center for Earthquake Engineering Research: Buffalo, NY).
Alesch, D. and Petak, W., Guidance for seismic safety advocates: gaining
attention. In Promoting Seismic Safety: Guidance for Advocates,
MCEER-04-SP.02, edited by D. Alesch, P. May, R. Olshansky,
W. Petak and K. Tierney, 2002 (Multidisciplinary Center for Earthquake
Engineering Research: Buffalo, NY).
Altay, G., Deodatis, G., Franco, G., Gulkan, P., Kunreuther, H., Lus, H.,
Mete, E., Seeber, N., Smyth, A. and Yuzugullu, O., Benefit-cost analysis
for earthquake mitigation: evaluatingmeasures for apartment in Turkey, in
Proceedings of the Second Annual IIASA-DPRI Meeting, 2002 (Interna-
tional Institute for Advanced Systems Analysis: Laxenburg, Austria).
Bawa, V., Optimal rules for ordering uncertain prospects. Journal of
Financial Economics, 1975, 2, 95 – 121.
Bernknopf, R.L., Dintz, L.B., Rabinovici, S.J.M. and Evans, A.M., A
portfolio approach to evaluating natural hazard mitigation policies: an
application to lateral-spread ground failure in coastal California.
International Geology Review, 2001, 43(5), 424 – 440.
Bertsimas, D. and Tsitsiklis, J.N., Introduction to Linear Optimization, 1997
(Athena Scientific: Belmont, Mass).
Risk-return tradeoff in mitigation 143
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uth
Car
olin
a ]
at 0
1:13
06
Oct
ober
201
3

Carvalho, P.M.S. and Ferreira, L.A.F.M., Planning large-scale distribution
network for robust expansion under deregulation, in Proceedings of the
2000 Power Engineering Society Summer Meeting, 2000, pp. 1305 – 1310
(IEEE: Piscataway, NY).
Chang, S., Shinozuka, M. and Moore, II, J., Probabilistic earthquake
scenarios: extending risk analysis methodologies to spatially distributed
systems. Earthquake Spectra, 2000, 16(3), 557 – 572.
Dodo, A., Xu, N., Davidson, R.A. and Nozick, L.K., Optimizing regional
earthquake mitigation investment strategies. Earthquake Spectra, 2005, 21,
305 – 327.
Englehardt, J.D. and Peng, C., A Bayesian benefit-risk model applied to
the South Florida Building Code. Risk Analysis, 1996, 16(1), 81 – 91.
Ermoliev, Y.M., Ermolieva, T.Y., MacDonald, G.J., Norkin, V.I. and
Amendola, A., A system approach to management of catastrophic risks.
European Journal of Operations Research, 2000, 122, 452 – 460.
Federal Emergency Management Agency (FEMA), A Benefit-Cost Model
for the Seismic Rehabilitation of Buildings, Report No. 227/228, 1992
(FEMA: Washington, DC).
Federal Emergency Management Agency (FEMA), Seismic Rehabilitation
of Federal Buildings: A Benefit/Cost Model, Report No. 255/256, 1994
(FEMA: Washington, DC).
Federal Emergency Management Agency (FEMA), HAZUS Earthquake
Loss Estimation Methodology. Technical Manual, Service Release 1, 1999
(FEMA: Washington, DC).
Federal Emergency Management Agency (FEMA), State and Local Plan
Interim Criteria Under the Disaster Mitigation Act of 2000, 2002 (FEMA:
Washington, DC).
Federal Emergency Management Agency (FEMA), State and Local
Mitigation Planning How To Guide, Report No. 386-3, 2003 (FEMA:
Washington, DC).
Fishburn, P.C., Mean-risk analysis with risk associated with below-target
return. American Economic Review, 1977, 67(2), 116 – 126.
Laguna, M., Applying robust optimization to capacity expansion of one
location in telecommunications with demand uncertainty. Management
Science, 1998, 44(11), S101 – S110.
List, G., Wood, B., Nozick, L., Turnquist, M., Jones, D., Kjeldgaard, E.
and Lawton, C., Robust optimization for fleet planning under
uncertainty. Transportation Research Part E: Logistics and Transporta-
tion Review, 2003, 39(3), 209 – 227.
Los Angeles Department of City Planning Demographics Research Unit
(LADRU), Statistical Information, 2004. Available online at: www.
cityplanning.lacity.org/dru/HomeC2K.htm
Malcolm, S.A. and Zenios, S.A., Robust optimization for power system
capacity expansion under uncertainty. Journal Operational Research
Society, 1994, 45(9), 1040 – 1049.
Mostafa, E.M. and Grigoriu, M., A methodology for optimizing retrofitting
techniques, inProceedings of the 7thU.S.NationalConference onEarthquake
Engineering, 2002 (Earthquake Engineering Research Institute: Boston).
Mulvey, J. and Ruszczynski. A., A new scenario decomposition method
for large-scale stochastic optimization. Operations Research, 1995, 43(3),
477 – 490.
Mulvey, J.M., Vanderbei, R.J. and Zenios, S.A., Robust optimization of
large-scale system. Operations Research, 1995, 43(2), 254 – 281.
Paraskevopoulos, D., Karakistos, E. and Rustem, B., Robust capacity
planning under uncertainty.Management Science, 1991, 37(7), 787 – 800.
Prater, C. and Lindell, M., Politics of hazard mitigation. Natural Hazards
Review, 2000, 1(2), 73 – 82.
Sarin, R.K., A social decision analysis of the earthquake safety problem:
the case of existing Los Angeles buildings. Risk Analysis, 1983, 3(1), 35 – 50.
Seligson, H.A., Blais, N.C., Eguchi, R.T., Flores, P.J. and Bortugno, E.,
Regional benefit-cost analysis for earthquake hazard mitigation: applica-
tion to the Northridge Earthquake, in Proceedings of the 6th U.S. National
Conference on Earthquake Engineering, 1998 (Earthquake Engineering
Research Institute: Seattle).
Shah, H.C., Bendimerad, M.F. and Stojanovski, P., Resource allocation in
seismic risk mitigation, in Proceedings of the 10th World Conference on
Earthquake Engineering, 4, 1991, pp. 6007 – 6011 (International Associa-
tion of Earthquake Engineering: Madrid).
Taylor, C.E. and Werner, S.D., Proposed acceptable earthquake risk
procedures for the Port of Los Angeles 2020 Expansion program, in
Proceedings of the 4th Technical Council on Lifeline Earthquake
Engineering, 1995, pp. 64 – 71 (American Society of Civil Engineers:
San Francisco).
US Small Business Administration (SBA), 2003. Available online at:
www.sba.gov
Werner, S.D., Taylor, C.E., Dahlgren, T., Lobedan, F., LaBasco, T.R. and
Ogunfunmi, K., Seismic risk analysis of Port of Oakland container
berths, in Proceedings of the 7th U.S. National Conference on Earthquake
Engineering, 2002 (Earthquake Engineering Research Institute: Boston).
Werner, S.D., Taylor, C.E. and Ferritto, J.M., Seismic risk reduction
planning for ports lifelines, in Proceedings of the 5th Technical Council on
Lifeline Earthquake Engineering, 1999, pp. 503 – 512 (American Society
of Civil Engineers: Seattle).
Appendix I. Theorem proof
Theorem
If Fcc 0
m þ Fc 0c00m � Fcc00
m for all c� c0 � c00 and m; Fcc 0
mt ¼ Fcc 0
m
for all t; and Rdcmt ¼ Rdc
m for all t; then an optimal solution
satisfies z cc0
mt ¼ 0 for all c5 c0, m, and t� 2.
Proof
The theorem is presented for the case in which the planning
horizon is two periods. It can be proved for T periods by
induction on the number of periods in the planning
horizon. We begin by supposing that this theorem is not
valid. In that case, there exists an optimal solution
I ¼ �z cc0
m1 ;�vcm1;�y
ldcm1;�x
cm1;�z
cc 0
m2 ;�vcm2;�y
ldcm2;�x
cm2
� �: 8c;c 0;d;l;m
� such
that �zcacg~m2 > 0 for some ca, cg, and ~m. That is, there is
mitigation for some class ~m from c to ca in period 1 and
from ca to cg in period 2. To simplify the notation, we
assume that �z cc0
m2 ¼ 0 for c;c 0;mð Þ 6¼ ca;cg; ~m� �
. Therefore
there exists a j, 05j� 1, such that �zcacg~m2 ¼ j
Pc �z cca~m1 . This
simply indicates that some fraction of the square footage
that was mitigated from c to ca in period 1 will be further
mitigated to cg in period 2.
We define an alternative set of feasible mitigation
decisions as follows: z cca~m1 ¼ 1� jð Þ�z cca~m1 , zccg~m1 ¼ �z
ccg~m1 þ j�z cca~m1 ,
and z cc0
m1 ¼ �z cc0
m1 for c 0;mð Þ 6¼ cg; ~m� �
and c 0;mð Þ 6¼ ca; ~mð Þ,and z cc
0
m2 ¼ 0 for all c, c0, and m. This alternative
solution says that for class ~m, the square footage that was
mitigated from c to ca in period 1 and mitigated from ca to
cg in period 2 in the original solution will now be mitigated
directly cg in period 1. For all other classes, the
recommendations are the same. This second solution is
then defined as: II ¼ z cc0
m1 ;vcm1;y
ldcm1;x
cm1;z
cc 0
m2 ;vcm2;y
ldcm2;x
cm2
� �:
�8c;c 0;d;l;mg, where vcm1 ¼ vcm2 ¼ �vcm2, yldcm1 ¼ �yldcm2, and
xcm1 ¼ �xcm2. Let �vt ¼ �vcmt : 8m;c� �
for t¼ 1,2.
144 N. Xu et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uth
Car
olin
a ]
at 0
1:13
06
Oct
ober
201
3

We now show that the objective value for solution II is less
than the objective value for solution I.When solution I is used,
the cost in period 2 is Fcacg~m �z
cacg~m2 þ f �v2ð Þ where f �v2ð Þ is the sum
of the expected reconstruction cost and the risk aversion-
weighted average excess reconstruction cost (i.e. the two
rightmost terms in equation (13)) in period 2 based on the
condition of the inventory, �vcm2; after mitigation in period 2.
Now, since solution I is optimal, the following must hold:
Fcacg~m �z
cacg~m2 þ f �v2ð Þ � f �v1ð Þ; ð26Þ
where f �v1ð Þ is the sum of the expected reconstruction cost
and the risk aversion-weighted average excess reconstruc-
tion cost in period 2 based on the condition of the
inventory at the end of period 1. The right side of the
equation assumes that the mitigation identified for period 2
is not done.
Now we can add the mitigation costs for period 1 to both
sides of the equation.
Xc;c 0;m
Fcc 0
m �z cc0
m1 þ Fcacg~m �z
cacg~m2 þ f �v2ð Þ �
Xc;c 0;m
Fcc 0
m �z cc0
m1 þ f �v1ð Þ:
ð27Þ
Since we assume that the cost coefficients are stationary,
the right side of the equation is also the total cost in
period 1 by solution I. We claim that the left side of the
inequality is not less than the total cost in period 1 by
solution II, which would mean that the period 1 cost for
solution II is cheaper then the period 1 cost for solution I.
To see this, note that:Xc;c 0;m
Fcc 0
m �z cc0
m1 þ Fcacg~m �z
cacg~m2 þ f �v2ð Þ
¼Xc
Xc 0;mð Þ6¼ ca; ~mð Þ
Fcc 0
m �z cc0
m1 þXc
F cca~m �z cca~m1
þXc
jFcacg~m �z cca~m1 þ f �v2ð Þ; ð28aÞ
¼Xc
Xc 0;mð Þ6¼ ca; ~mð Þ
Fcc 0
m �z cc0
m1 þXc
1� jð ÞFcca~m �z cca~m1
þXc
j Fcca~m þ F
cacg~m
� ��z cca~m1 þ f �v2ð Þ; ð28bÞ
�Xc
Xc 0;mð Þ6¼ ca; ~mð Þ
Fcc 0
m �z cc0
m1 þXc
1� jð ÞFcca~m �z cca~m1
þXc
jFccg~m �z cca~m1 þ f �v2ð Þ; ð28cÞ
¼Xc
Xðc 0;mÞ6¼ðca; ~mÞðc 0;mÞ6¼ðcg; ~mÞ
Fcc 0
m �z cc0
m1 þXc
1� jð ÞFcca~m �z cca~m1
þXc
Fccg~m �z
ccg~m1 þ j�z cca~m1
� �þ f �v2ð Þ; ð28dÞ
¼Xc;c 0;m
Fcc 0
m z cc0
m1 þ f �v2ð Þ: ð28eÞ
Equation (28a) results from restating �zcacg~m2 in terms of �z cca~m1 ,
equation (28c) follows from the assumption about mitiga-
tion cost Fcc 0
m þ Fc 0c00
m �Fcc00
m for all c � c 0 � c00 and m� �
and
equation (28e) follows from substituting the definition of
z cc0
m1 . Therefore, by transitivity, the right side of equation
(28e) is less than or equal to the right side of equation (27):Xc;c 0;m
Fcc 0
m zcc0
m1 þ f �v2ð Þ �Xc;c 0;m
Fcc 0
m �z cc0
m1 þ f �v1ð Þ: ð29Þ
The inequality still holds if f �v2ð Þ=ð1þ rÞ is added to both
sides, and it becomes the inequality in equation (30)
if Fcacg~m �z
cacg~m2 =ð1þ rÞ is added to the right side:
Xc;c 0;m
Fcc 0
m zcc0
m1 þ f �v2ð Þ þ1
1þ rf �v2ð Þ <
Xc;c 0;m
Fcc 0
m �z cc0
m1 þ f �v1ð Þ
þ 1
1þ rF
cacg~m �z
cacg~m2 þ f �v2ð Þ
� �: ð30Þ
Therefore, the cost of solution II is less than that of
solution I. This contradicts the hypothesis that solution I is
optimal, so the theorem holds.
Appendix II. Notation
adcm Per-period probability that the building areas in
class m that were designed to seismic code c enter
damage state d
Bt User-defined allowable loss in period t
c Index of seismic design code
d Index of damage state
E Average expected excess reconstruction cost over
all possible earthquakes during the time horizon
(i.e. expected loss beyond what is considered to be
manageable)
Fcc 0
mt Per square foot cost to upgrade the building areas
in class m from seismic code c to code c0 in time
period t
i Index of structural type
j Index of occupancy type
k Index of census tract
h Index of extreme points in solution iteration
L Number of earthquake scenarios considered
l Index of earthquake scenario
m Class of buildings in census tract k that are of
structural type i and occupancy type j
n Index of solution iteration
Pl Per-period probability of occurrence of earthquake
scenario l
Rdcc 0
mt Per square foot reconstruction cost for building
area in class m that was designed to seismic code c,
enters damage state d, and is repaired to condition
c0 during time period t
Risk-return tradeoff in mitigation 145
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uth
Car
olin
a ]
at 0
1:13
06
Oct
ober
201
3
r Annual interest rate
T Number of periods in planning horizon
t Index of time
xcmt Square footage of buildings in class m at the end of
period t that are designed to seismic code c
ydcc0
mt Square footage of buildings in class m that was in
condition c, entered damage state d as a result of an
earthquake, and is repaired to seismic code c0 during
time period t
z cc0
mt Square footage of buildings in class m that were in
seismic design code c at the end of period t7 1 and
were mitigated to seismic code c0 at the beginning of
period t
blt Excess reconstruction cost for earthquake l and
period t, the dollar amount of loss greater than Bt
d Factor to discount cash flow to present value
k User-defined risk aversion weight used to tradeoff
risk and return objectives
vcmt Square footage of buildings during time t that are in
class m designed to seismic code c, after mitigation
but before an earthquake occurs
146 N. Xu et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f So
uth
Car
olin
a ]
at 0
1:13
06
Oct
ober
201
3