the past, present and future of mobile 3d laser … past, present and future of mobile 3d laser...
TRANSCRIPT

Brought to you by: Sponsored by:
The webinar will begin shortly. You will hear silence until the webinar begins.
Please note that this webinar is being recorded and all registrants will be sent the link to the recorded version as well as the link to the PDF version of the presentation.
Audio is provided through your computer speakers only. If you are unable to hear the audio through your computer speakers, simply click on the “request
phone” button on the top right hand side of your screen for teleconference information.
Technical Support Problems for this Webinar: Email: [email protected]
The Past, Present and Future of Mobile 3D Laser Scanning

The Past, Present and Future of Mobile 3D Laser Scanning
Sponsored by:
Sean Higgins Editor, SPAR Point Group Diversified Communications
Presenters:
Moderator:
Dr. Robert Radovanovic, P. Eng., A.L.S., C.L.S Chief Technical Officer SarPoint Engineering
Matthew Craig Business Dev. Manager LFM

www.lfm-software.com
The Past, Present and Future of Mobile 3D Laser Scanning December 2015
Using Mobile Laser Scan Data for Transportation and Infrastructure Surveying and Mapping – Sorting Apples and Oranges
Dr. Robert Radovanovic, P.Eng., A.L.S., C.L.S. Cell : 403-461-4056 Email : [email protected] SarPoint Engineering Ltd. Calgary, Alberta, Canada
SarPoint Mobile Laser Scanning – Apples and Oranges
Overview • Intro : Collecting Data via Mobile Laser
Scanning (MLS) – Collection Concepts – Typical Cloud Deliverables – Adjustment of Data / Georeferencing – Validation of Data / QA / QC – Variations in systems
• Actually Using Mobile Laser Scan Data (Or “Avoiding Point Cloud Overload Syndrome”) – Extraction of Features – Establishing Contractor Standards
• Sample Applications – Sign Asset Mapping – Rail Alignment Surveying
• Discussion
SarPoint Mobile Laser Scanning – Apples and Oranges
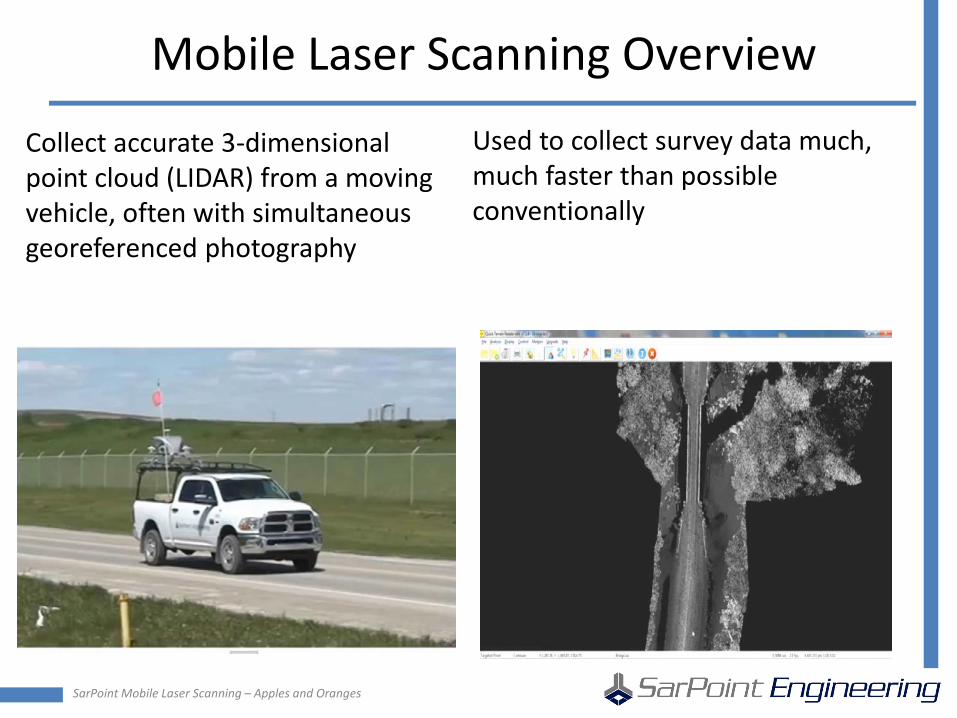
Mobile Laser Scanning Overview
Collect accurate 3-dimensional point cloud (LIDAR) from a moving vehicle, often with simultaneous georeferenced photography
Used to collect survey data much, much faster than possible conventionally
SarPoint Mobile Laser Scanning – Apples and Oranges
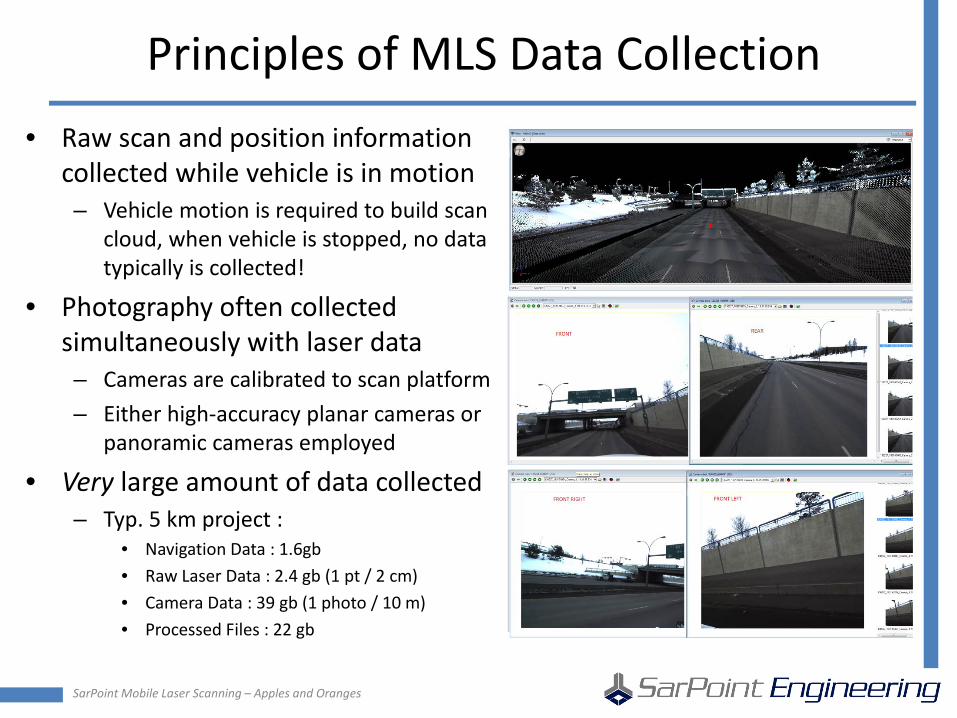
Principles of MLS Data Collection • Raw scan and position information
collected while vehicle is in motion – Vehicle motion is required to build scan
cloud, when vehicle is stopped, no data typically is collected!
• Photography often collected simultaneously with laser data – Cameras are calibrated to scan platform – Either high-accuracy planar cameras or
panoramic cameras employed
• Very large amount of data collected – Typ. 5 km project :
• Navigation Data : 1.6gb • Raw Laser Data : 2.4 gb (1 pt / 2 cm) • Camera Data : 39 gb (1 photo / 10 m) • Processed Files : 22 gb
SarPoint Mobile Laser Scanning – Apples and Oranges
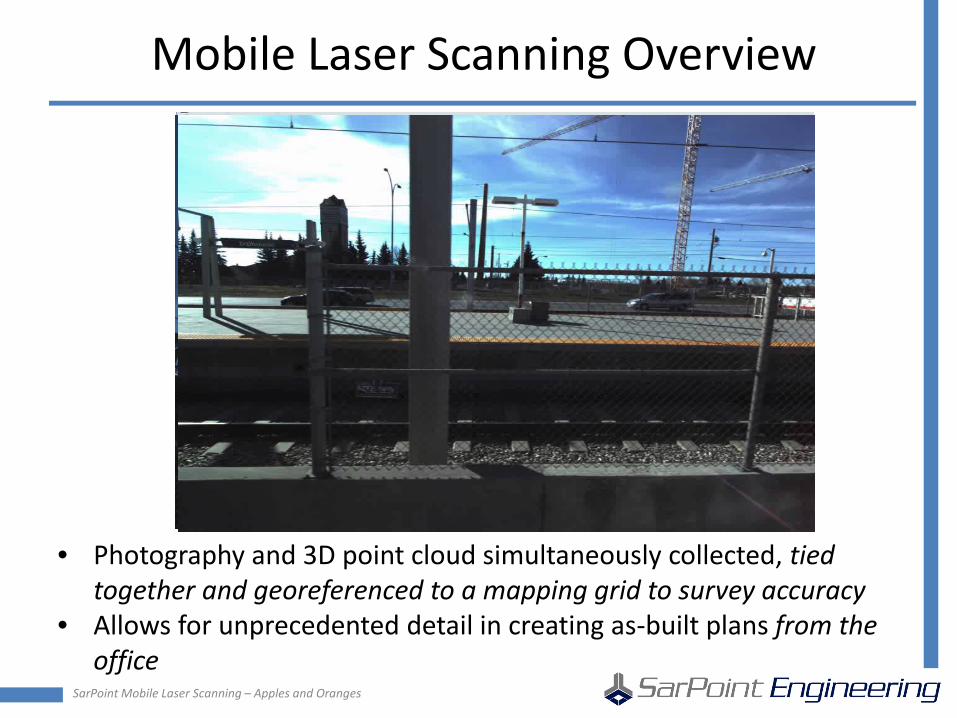
Mobile Laser Scanning Overview
• Photography and 3D point cloud simultaneously collected, tied together and georeferenced to a mapping grid to survey accuracy
• Allows for unprecedented detail in creating as-built plans from the office
SarPoint Mobile Laser Scanning – Apples and Oranges
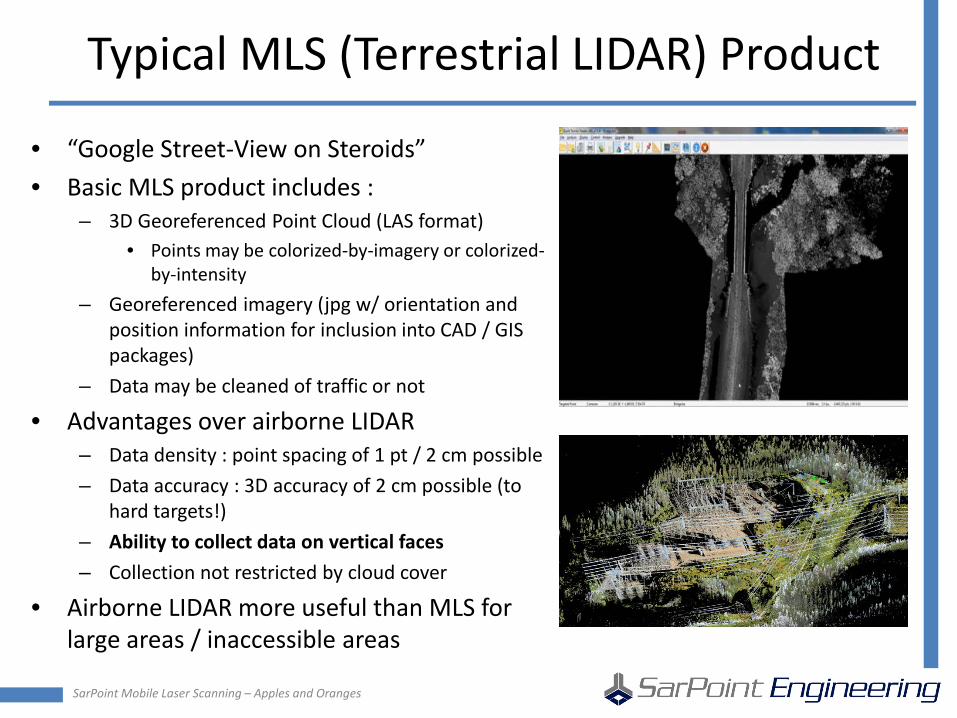
Typical MLS (Terrestrial LIDAR) Product
• “Google Street-View on Steroids” • Basic MLS product includes :
– 3D Georeferenced Point Cloud (LAS format) • Points may be colorized-by-imagery or colorized-
by-intensity – Georeferenced imagery (jpg w/ orientation and
position information for inclusion into CAD / GIS packages)
– Data may be cleaned of traffic or not
• Advantages over airborne LIDAR – Data density : point spacing of 1 pt / 2 cm possible – Data accuracy : 3D accuracy of 2 cm possible (to
hard targets!) – Ability to collect data on vertical faces – Collection not restricted by cloud cover
• Airborne LIDAR more useful than MLS for large areas / inaccessible areas
SarPoint Mobile Laser Scanning – Apples and Oranges
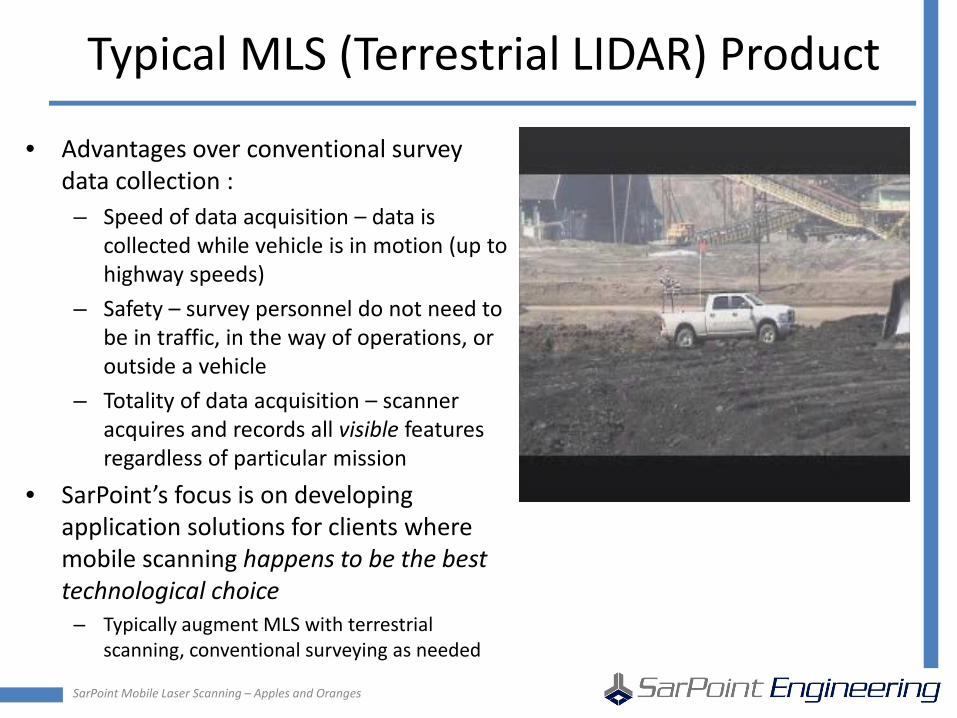
Typical MLS (Terrestrial LIDAR) Product
• Advantages over conventional survey data collection : – Speed of data acquisition – data is
collected while vehicle is in motion (up to highway speeds)
– Safety – survey personnel do not need to be in traffic, in the way of operations, or outside a vehicle
– Totality of data acquisition – scanner acquires and records all visible features regardless of particular mission
• SarPoint’s focus is on developing application solutions for clients where mobile scanning happens to be the best technological choice
– Typically augment MLS with terrestrial scanning, conventional surveying as needed
SarPoint Mobile Laser Scanning – Apples and Oranges
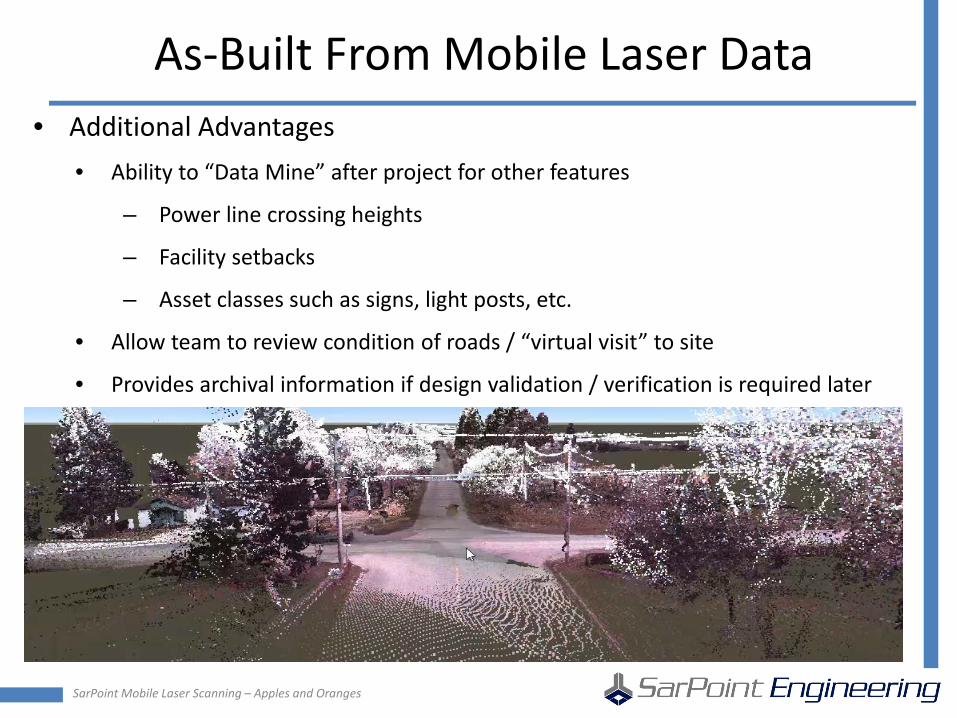
As-Built From Mobile Laser Data • Additional Advantages
• Ability to “Data Mine” after project for other features
– Power line crossing heights
– Facility setbacks
– Asset classes such as signs, light posts, etc.
• Allow team to review condition of roads / “virtual visit” to site
• Provides archival information if design validation / verification is required later
SarPoint Mobile Laser Scanning – Apples and Oranges
Principles of MLS Data Collection
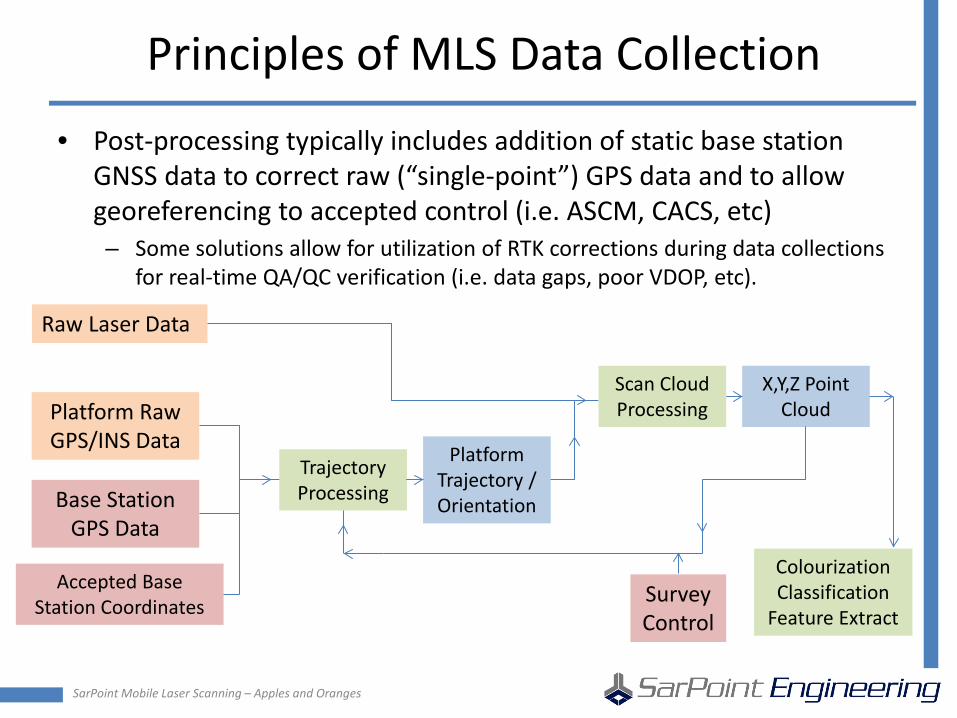
• Post-processing typically includes addition of static base station GNSS data to correct raw (“single-point”) GPS data and to allow georeferencing to accepted control (i.e. ASCM, CACS, etc) – Some solutions allow for utilization of RTK corrections during data collections
for real-time QA/QC verification (i.e. data gaps, poor VDOP, etc).
Raw Laser Data
Platform Raw GPS/INS Data
Base Station GPS Data
Accepted Base Station Coordinates
Trajectory Processing
Platform Trajectory / Orientation
Scan Cloud Processing
X,Y,Z Point Cloud
Survey Control
Colourization Classification
Feature Extract
SarPoint Mobile Laser Scanning – Apples and Oranges
Adjustment of MLS Data
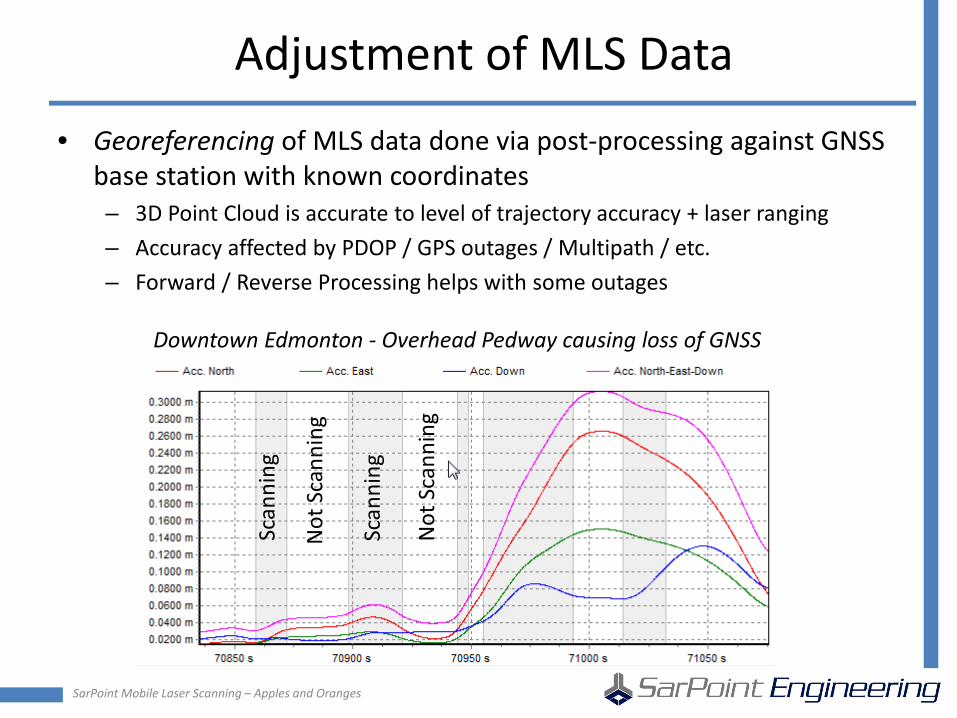
• Georeferencing of MLS data done via post-processing against GNSS base station with known coordinates – 3D Point Cloud is accurate to level of trajectory accuracy + laser ranging – Accuracy affected by PDOP / GPS outages / Multipath / etc. – Forward / Reverse Processing helps with some outages
Downtown Edmonton - Overhead Pedway causing loss of GNSS
Scan
ning
Not
Sca
nnin
g
Scan
ning
Not
Sca
nnin
g
SarPoint Mobile Laser Scanning – Apples and Oranges
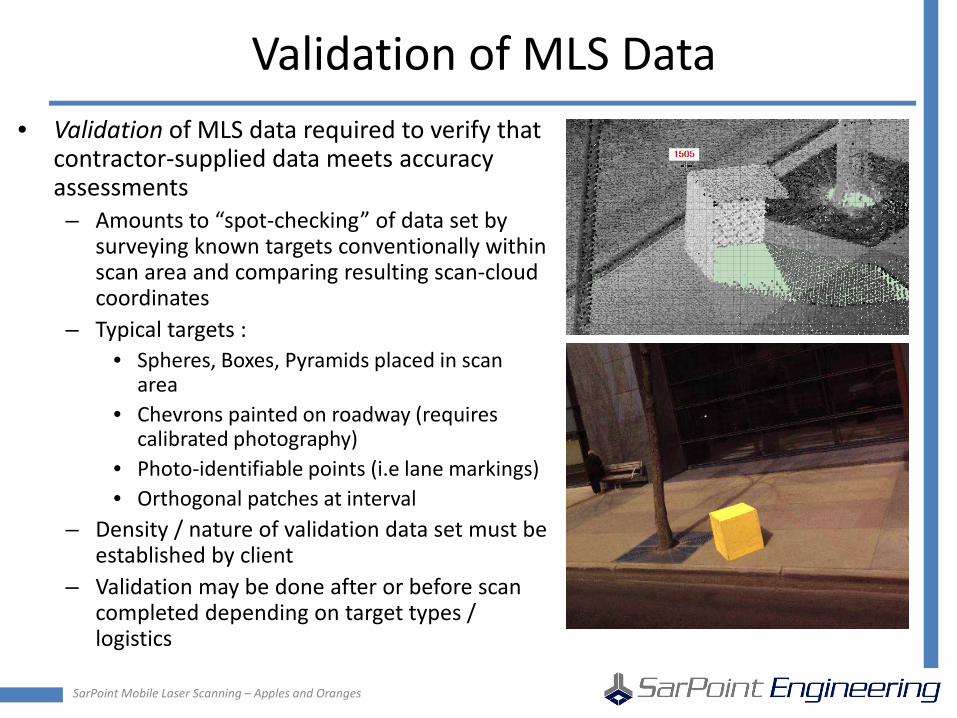
Validation of MLS Data • Validation of MLS data required to verify that
contractor-supplied data meets accuracy assessments – Amounts to “spot-checking” of data set by
surveying known targets conventionally within scan area and comparing resulting scan-cloud coordinates
– Typical targets : • Spheres, Boxes, Pyramids placed in scan
area • Chevrons painted on roadway (requires
calibrated photography) • Photo-identifiable points (i.e lane markings) • Orthogonal patches at interval
– Density / nature of validation data set must be established by client
– Validation may be done after or before scan completed depending on target types / logistics
SarPoint Mobile Laser Scanning – Apples and Oranges
Validation of MLS Data
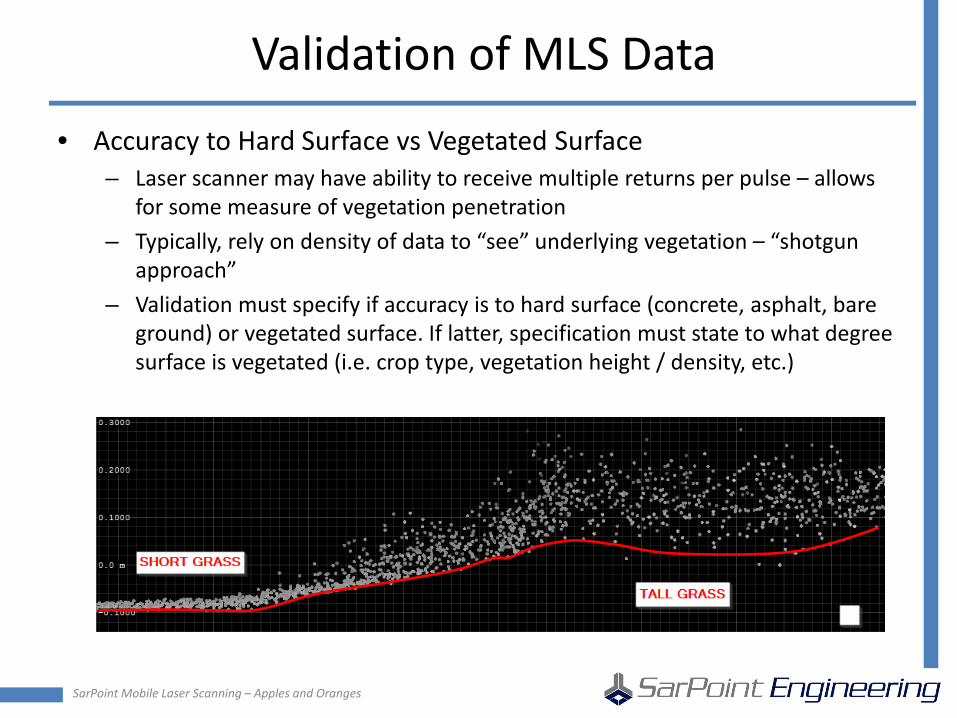
• Accuracy to Hard Surface vs Vegetated Surface – Laser scanner may have ability to receive multiple returns per pulse – allows
for some measure of vegetation penetration – Typically, rely on density of data to “see” underlying vegetation – “shotgun
approach” – Validation must specify if accuracy is to hard surface (concrete, asphalt, bare
ground) or vegetated surface. If latter, specification must state to what degree surface is vegetated (i.e. crop type, vegetation height / density, etc.)
SarPoint Mobile Laser Scanning – Apples and Oranges
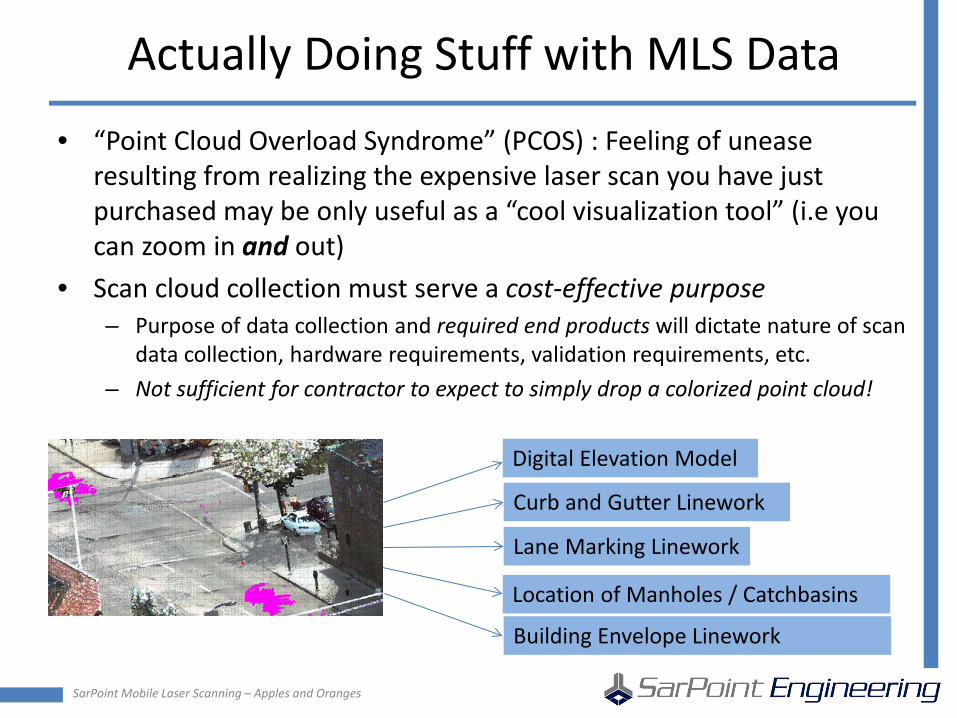
Actually Doing Stuff with MLS Data
• “Point Cloud Overload Syndrome” (PCOS) : Feeling of unease resulting from realizing the expensive laser scan you have just purchased may be only useful as a “cool visualization tool” (i.e you can zoom in and out)
• Scan cloud collection must serve a cost-effective purpose – Purpose of data collection and required end products will dictate nature of scan
data collection, hardware requirements, validation requirements, etc. – Not sufficient for contractor to expect to simply drop a colorized point cloud!
Digital Elevation Model
Curb and Gutter Linework
Lane Marking Linework
Location of Manholes / Catchbasins
Building Envelope Linework
SarPoint Mobile Laser Scanning – Apples and Oranges
Minimum Base Deliverables
• Georeferencing information : datum/geoid/projection – Meta-data is critical for later use of data
• QA/QC report : estimated accuracies, validation, report outlining collection procedure
• LAS File : preferably tiled to limit tile sizes to 1 gb – Colourisation optional – Traffic should be removed if LAS file used in-house or for visualization purposes – Classification into ground, high/med/low vegetation, as per ASPRS guidelines
(very time consuming)
• Georeferenced Photography – Photos to include orientation/position information in TerraPhoto / TopoDOT /
CSV standard formats – Calibration standards for imagery required (i.e. how tight to the cloud are the
photos?)
SarPoint Mobile Laser Scanning – Apples and Oranges
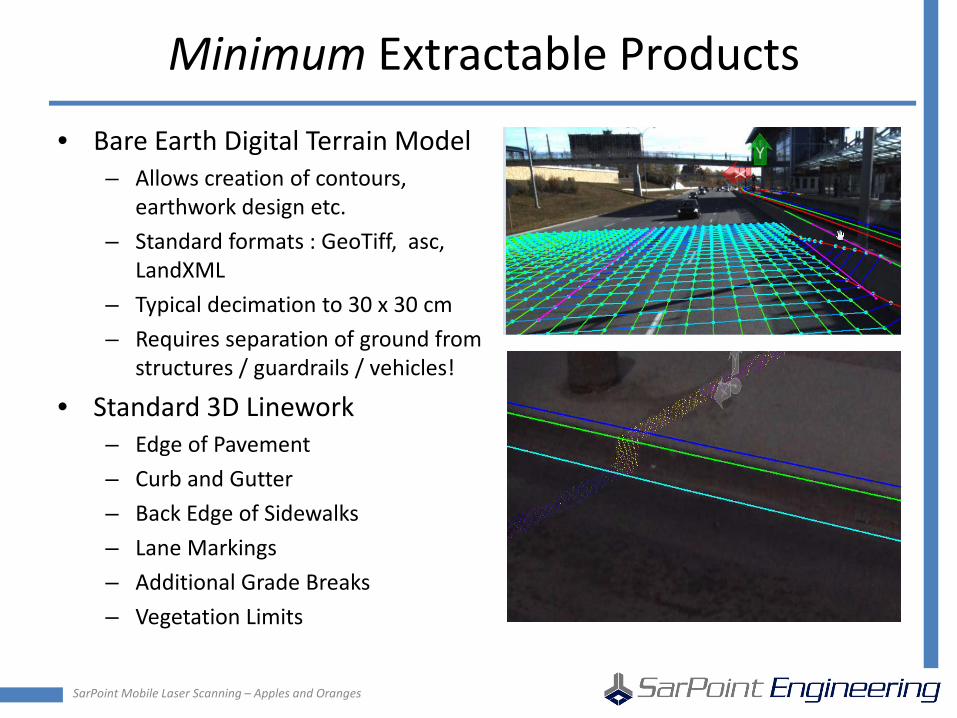
Minimum Extractable Products
• Bare Earth Digital Terrain Model – Allows creation of contours,
earthwork design etc. – Standard formats : GeoTiff, asc,
LandXML – Typical decimation to 30 x 30 cm – Requires separation of ground from
structures / guardrails / vehicles!
• Standard 3D Linework – Edge of Pavement – Curb and Gutter – Back Edge of Sidewalks – Lane Markings – Additional Grade Breaks – Vegetation Limits
SarPoint Mobile Laser Scanning – Apples and Oranges
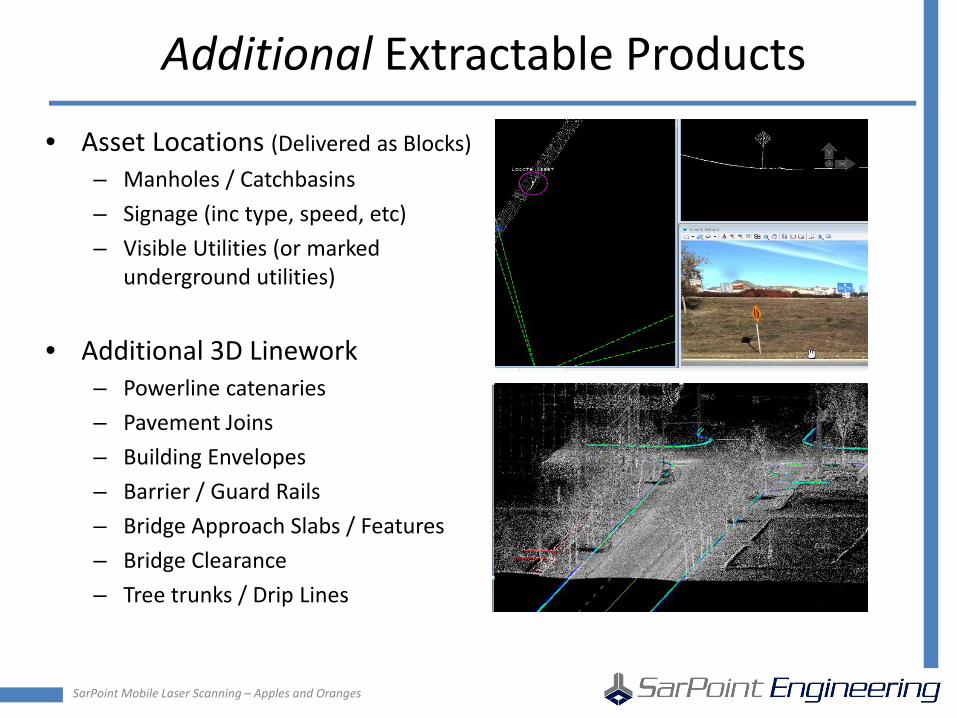
Additional Extractable Products
• Asset Locations (Delivered as Blocks) – Manholes / Catchbasins – Signage (inc type, speed, etc) – Visible Utilities (or marked
underground utilities)
• Additional 3D Linework – Powerline catenaries – Pavement Joins – Building Envelopes – Barrier / Guard Rails – Bridge Approach Slabs / Features – Bridge Clearance – Tree trunks / Drip Lines
Using Mobile Laser Scan Data for Transportation and Infrastructure Surveying and Mapping – Sorting Apples and Oranges
Dr. Robert Radovanovic, P.Eng., A.L.S., C.L.S. Cell : 403-461-4056 Email : [email protected] SarPoint Engineering Ltd. Calgary, Alberta, Canada
Copyright © 2014 LFM Software Limited. All rights reserved.
The HyperBubble & the Trusted Living Pointcloud
The Trusted Living Pointcloud is LFMs vision for the future of laser scanning. It is an evolving source of value-rich information that allows consumers to track their physical asset with an accurate, as-is, digital representation. We see 6 principles that underpin the Trusted Living Pointcloud…
2015

#1 Scalable #2 Maintainable #3 Verifiable #4 Accessible #5 Visual #6 Intelligent 6 Principles
Copyright © 2014 LFM Software Limited. All rights reserved.
How LFM solves #1
InfiniteCore® Technology – manage multi-thousand scans projects with ease – Reliable and stable performance
Neutral Gateway – Import data independent from used sensor
• Terrestrial scans • Kinematic scans • Handheld scans • Airborne scans
Project hierarchy – Manage several scan jobs in one project
2015
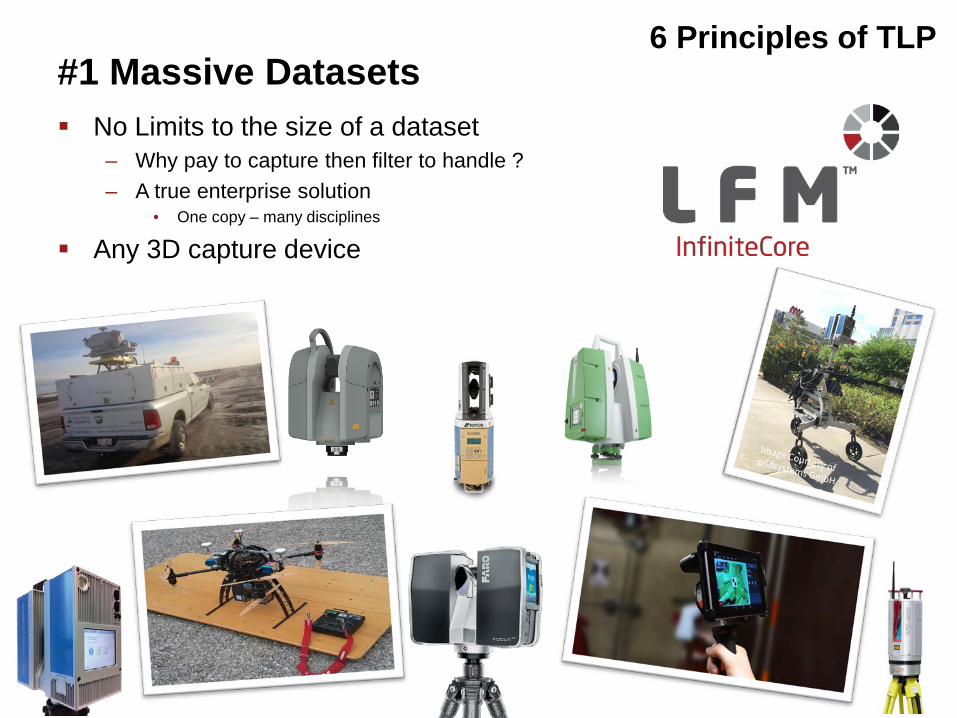
No Limits to the size of a dataset – Why pay to capture then filter to handle ? – A true enterprise solution
• One copy – many disciplines
Any 3D capture device
6 Principles of TLP
Image Courtesy of Sarpoint Engineering
#1 Massive Datasets
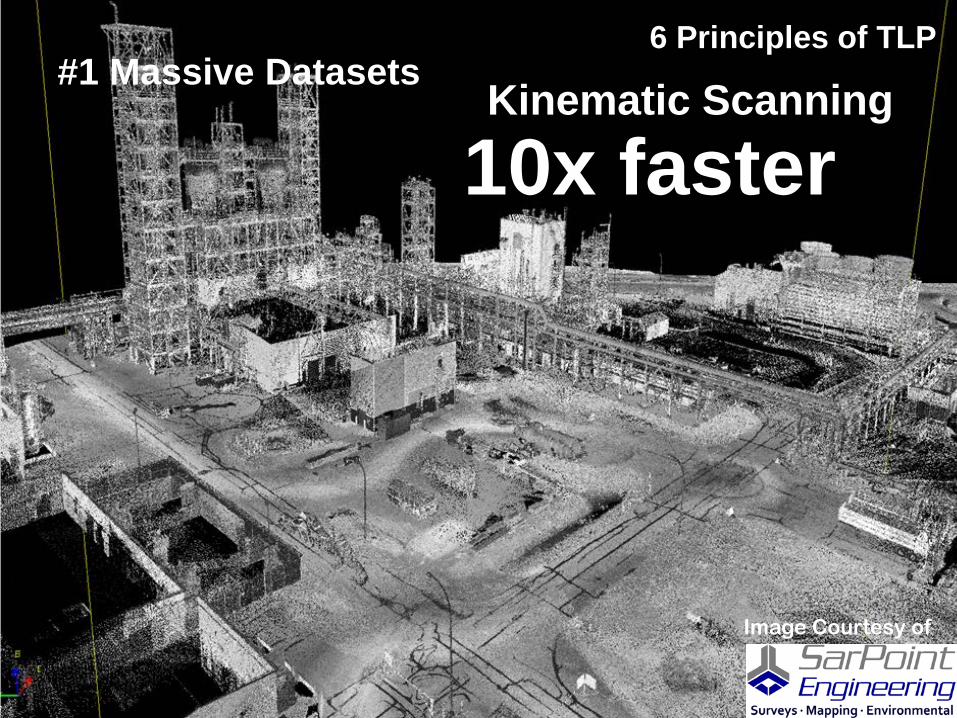
Kinematic Scanning
6 Principles of TLP
10x faster #1 Massive Datasets
Image Courtesy of
Copyright © 2014 LFM Software Limited. All rights reserved.
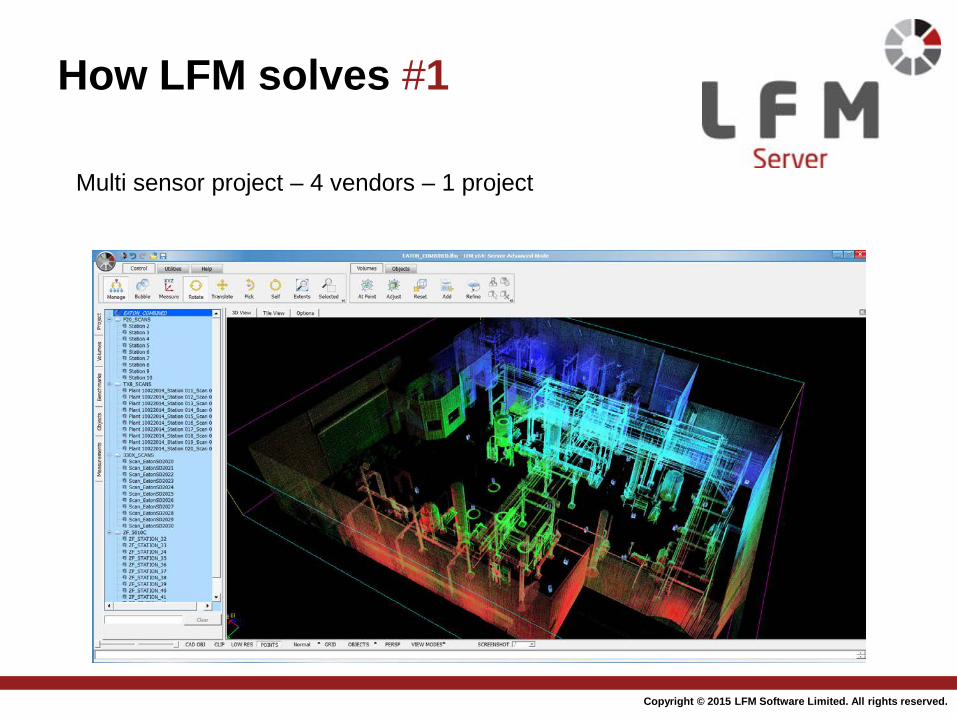
How LFM solves #1
Multi sensor project – 4 vendors – 1 project
2015

#1 Scalable #2 Maintainable #3 Verifiable #4 Accessible #5 Visual #6 Intelligent 6 Principles

Copyright © 2014 LFM Software Limited. All rights reserved. 2015
BubbleView™
Everybody loves the BubbleView
#5 Visual
Copyright © 2014 LFM Software Limited. All rights reserved.
BubbleView™ - Key Features Advantages
– Simple to understand – Easy to use – No apparent gaps
Drawbacks
– It’s a Static View • Cannot look behind objects
– Limited sense of depth – Can give false confidence of coverage – Can only be generated from terrestrial scan systems
2015
Copyright © 2014 LFM Software Limited. All rights reserved.
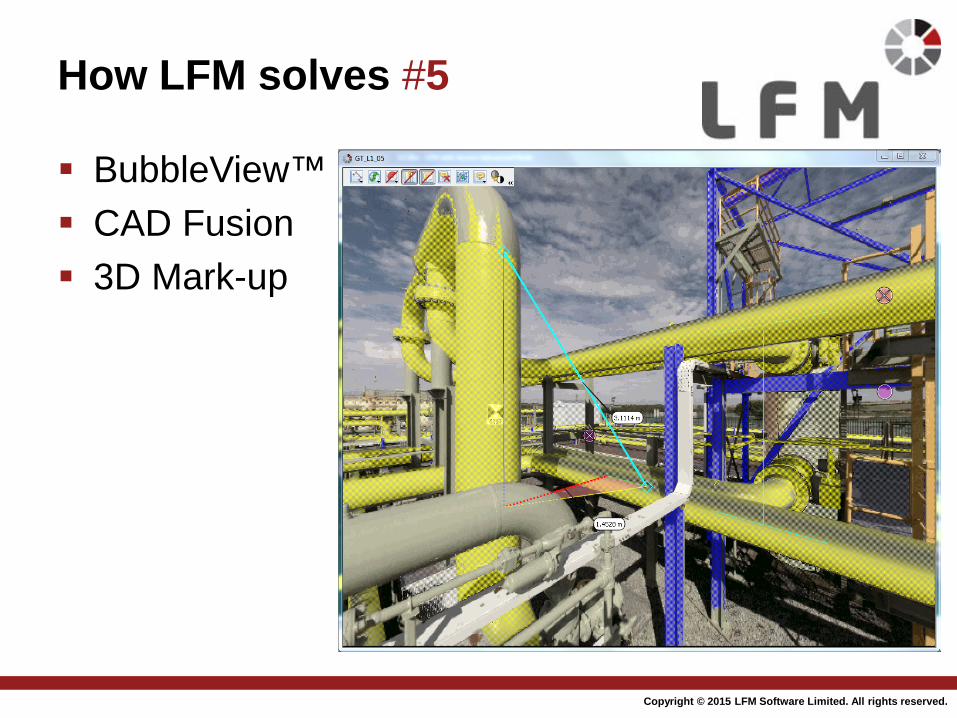
How LFM solves #5
BubbleView™ CAD Fusion 3D Mark-up
2015
Copyright © 2014 LFM Software Limited. All rights reserved.
What do we need?
– We want same image clarity – Keep the simplicity – But be able to fly anywhere
In the future
– Handheld and Kinematic
BubbleView™ – Escaping it
2015
HyperBubbleTM
6 Principles of TLP #5 Visual
Points
HyperBubble™
BubbleView™
Copyright © 2014 LFM Software Limited. All rights reserved.
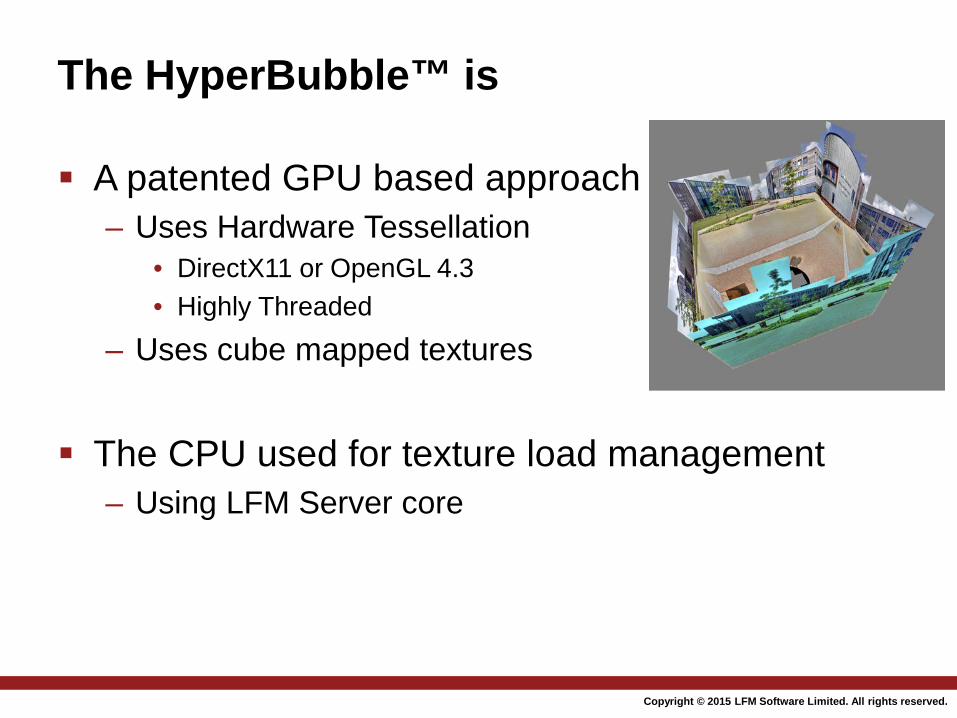
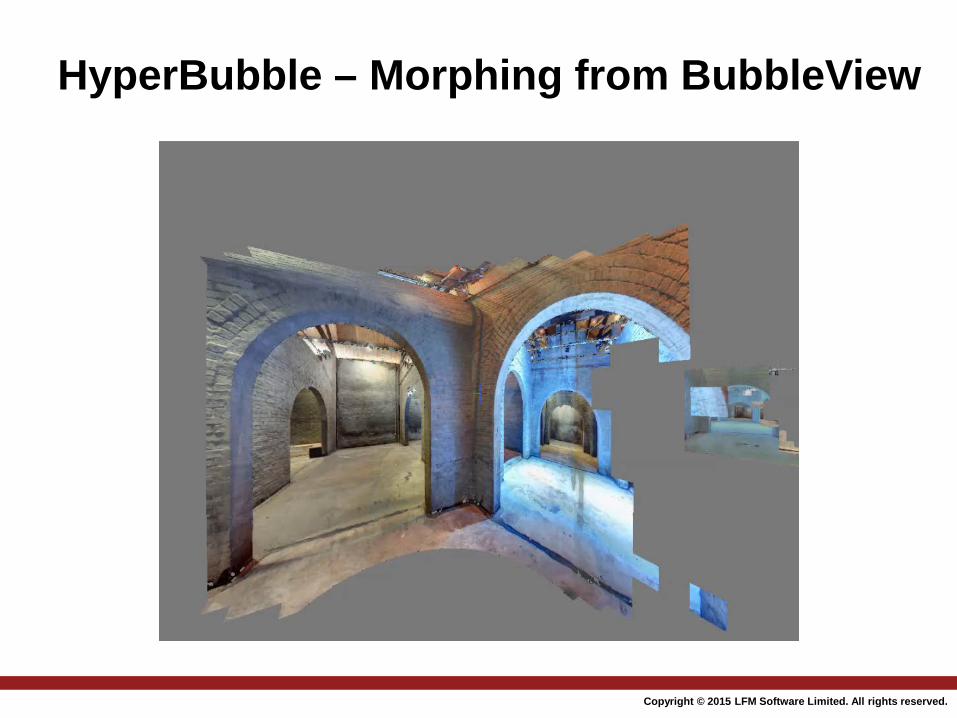
The HyperBubble™ is
A patented GPU based approach – Uses Hardware Tessellation
• DirectX11 or OpenGL 4.3 • Highly Threaded
– Uses cube mapped textures
The CPU used for texture load management – Using LFM Server core
2015
Copyright © 2014 LFM Software Limited. All rights reserved.
HyperBubble – Morphing from BubbleView
2015
Copyright © 2014 LFM Software Limited. All rights reserved.
HyperBubble™ – Core Features I
Solid look and feel – You really feel like you’ve been there
Game-like rendering speeds – but in the real world
High image clarity – Native definition available
Supports demolition – Rapid removal of unwanted regions
Scans can be added or removed – republish
2015
Copyright © 2014 LFM Software Limited. All rights reserved.
HyperBubble™ – Core Features II
Intuitive walk and look-round navigation. – Interaction with the environment
Active image management – Predictive loading for optimal quality
Parking at BubbleView – Drop back to native definition
Dynamic Overlay switching – Seamless switch between Colour, Monochrome
Back-face colouring and transparency – Know when you’re behind scanned objects.
2015
Copyright © 2014 LFM Software Limited. All rights reserved.
HyperBubble™ – Core Features III
Volume Clipping mode – Simple selection of area of interest
Mix-down with 3D models – Drop in CAD data
Works with all standard actions – Measurement – Mark-up
Access to the underlying points – Accurate measurement, trusted data
2015
Copyright © 2014 LFM Software Limited. All rights reserved.
LFM Server 4.4 – 3D Flight
Standard view control maintained ‘Steering Mode’ created to fly through the project
– HyperBubble™ – 3D point cloud
2015
Copyright © 2014 LFM Software Limited. All rights reserved.
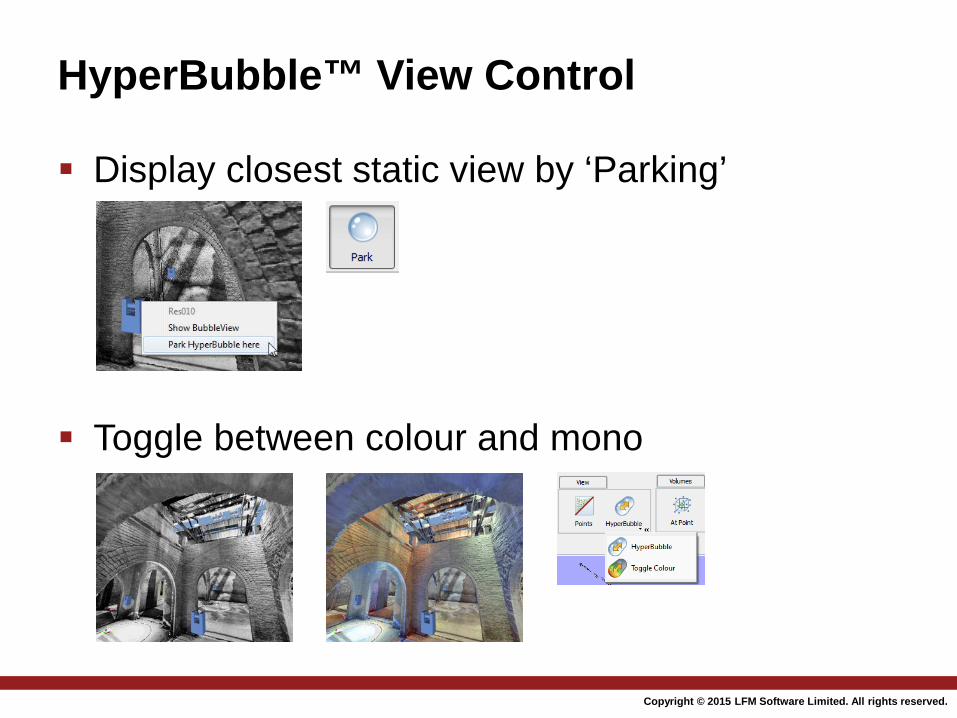
HyperBubble™ View Control
Display closest static view by ‘Parking’
Toggle between colour and mono
2015
Copyright © 2014 LFM Software Limited. All rights reserved.
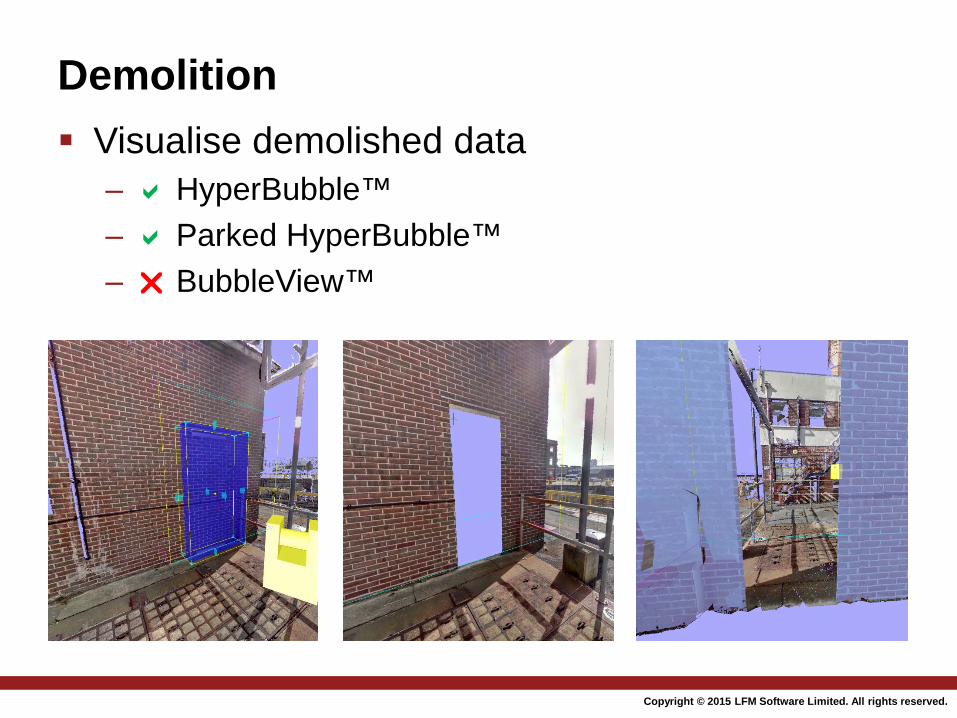
Demolition Visualise demolished data
– HyperBubble™ – Parked HyperBubble™ – BubbleView™
2015
Copyright © 2014 LFM Software Limited. All rights reserved.
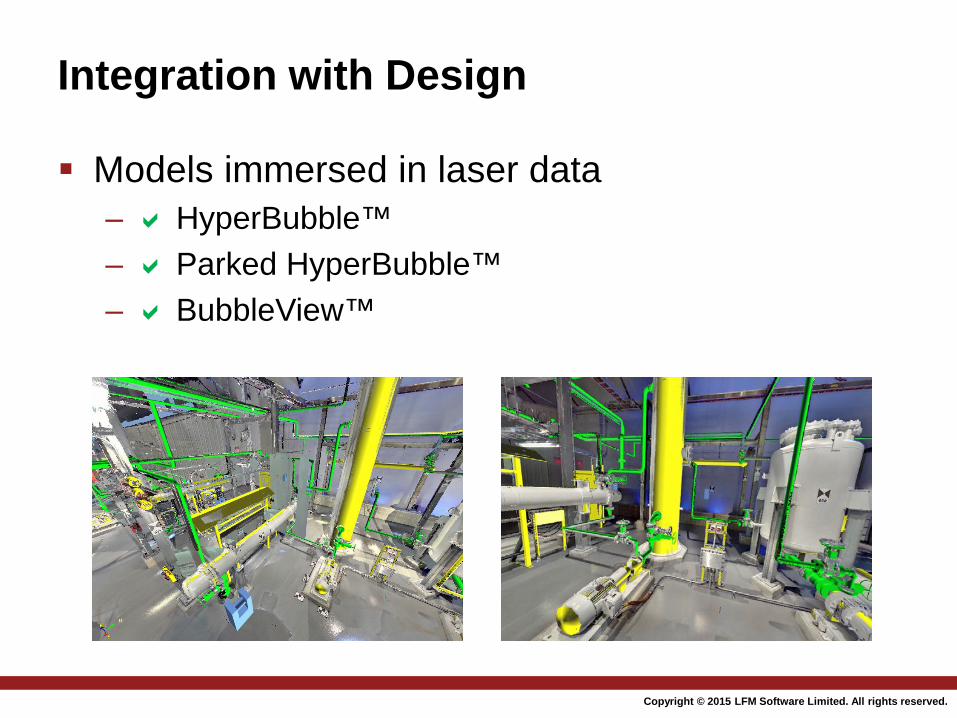
Integration with Design
Models immersed in laser data – HyperBubble™ – Parked HyperBubble™ – BubbleView™
2015
Copyright © 2014 LFM Software Limited. All rights reserved.
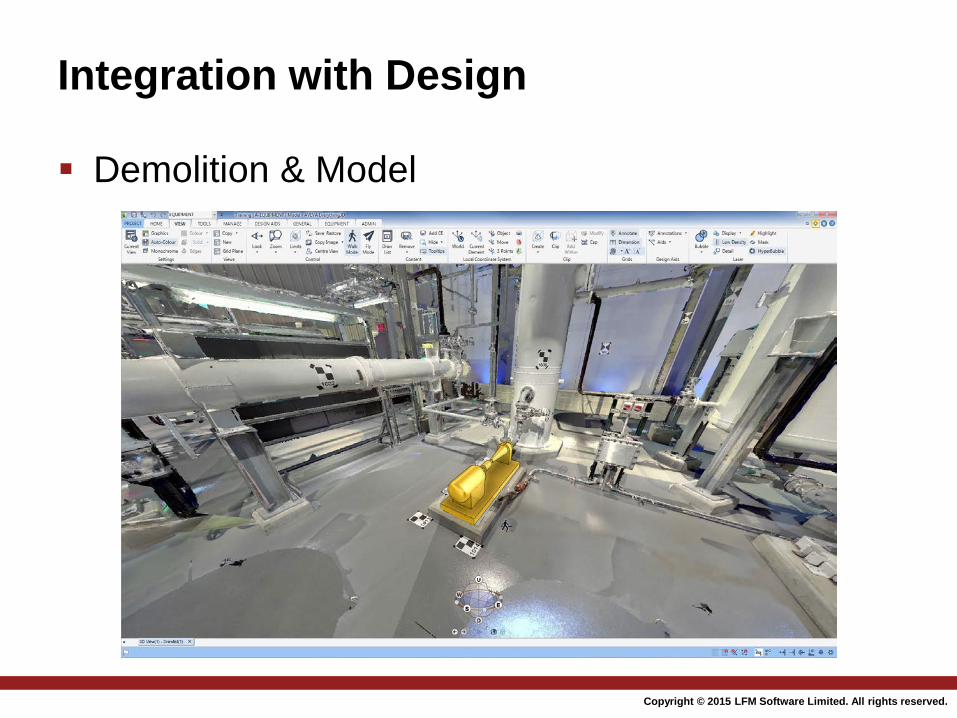
Integration with Design
Demolition & Model
2015
Copyright © 2014 LFM Software Limited. All rights reserved.
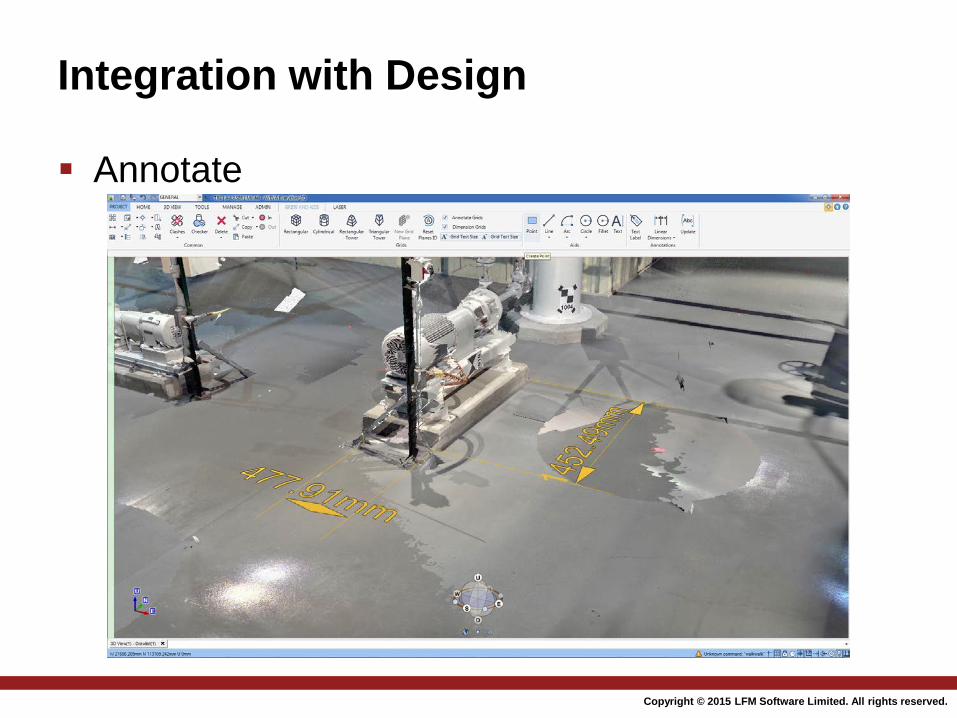
Integration with Design
Annotate
2015

www.lfm-software.com
Thank you

The Past, Present and Future of Mobile 3D Laser Scanning
Sponsored by:
Sean Higgins Editor, SPAR Point Group Diversified Communications [email protected]
Presenters:
Moderator:
Dr. Robert Radovanovic, P. Eng., A.L.S., C.L.S Chief Technical Officer SarPoint Engineering [email protected]
Matthew Craig Business Dev. Manager LFM [email protected]