simple polynomial approach to nonlinear control -...
TRANSCRIPT
Simple Polynomial Approach to Nonlinear Control
Mike Grimble and Pawel Majecki
Industrial Control Centre, University of Strathclydeand Industrial Systems and Control Ltd.,
Glasgow, Scotland

Nonlinear Multivariable CL System
Linear disturbance model: 1= fd dW A C−
Linear reference model: 1 fr rW A E−=
( )( ) ( )( )-ku t z u tΛ=W WNonlinear plant model:
Pc
Wr
Wd
r e u + -
y
d
W + +
m
Fc Disturbance model
Control weighting
Reference
Error weighting
+ + ξ
C0
Nonlinear plant Controller
0 c cP e uφ = + F
ω
Diagonal matrix of delays
Advantage of NGMV is only knowledge of NL plant model required is ability to compute an output for a given control input sequence.
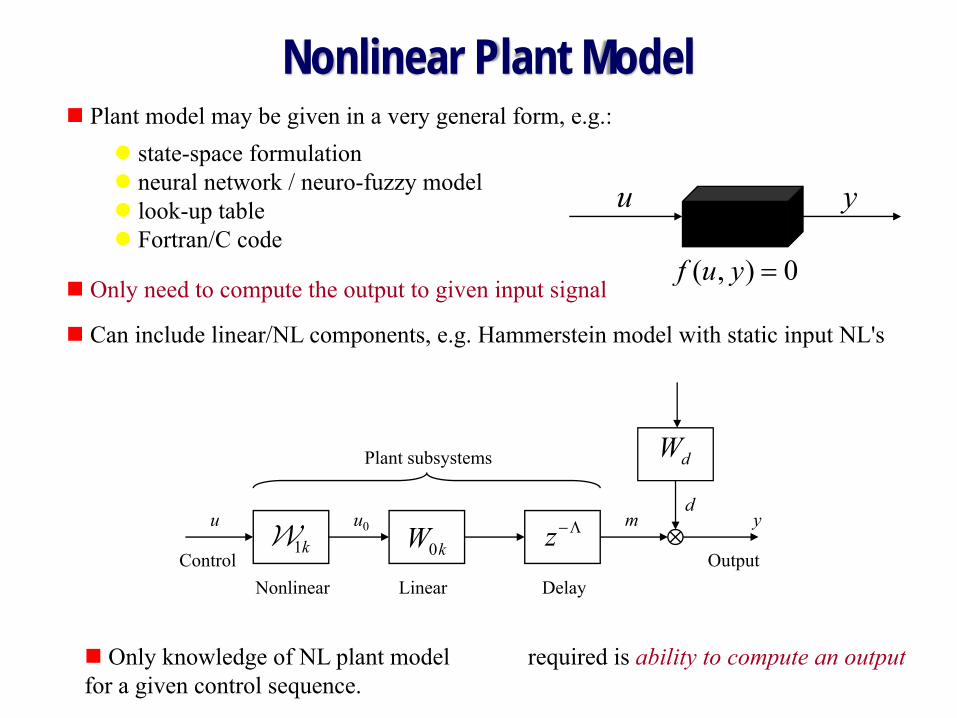
Plant model may be given in a very general form, e.g.:state-space formulationneural network / neuro-fuzzy modellook-up tableFortran/C code
Nonlinear Plant Model
Can include linear/NL components, e.g. Hammerstein model with static input NL's
( , ) 0f u y =Only need to compute the output to given input signal
1kW 0kW z−Λ
dW
ControlNonlinear Linear
u0u md
y
Output
Plant subsystems
Delay
u y
Only knowledge of NL plant model required is ability to compute an outputfor a given control sequence.

Equivalent ModelGOAL: Combine all stochastic inputs into one noise signal
1( ) ( ) ( )ff t Y z tε−=
( )tε - zero mean white noise of unit variance
* *ff rr dd r r d dФ Ф Ф W W W W= + = +
*f f ffY Y Ф=
Linear models driven by white noise
( ) ( ) ( )f t r t d t= −
0WCrW
dW
r d
0WCfY fε
Schur spectral factor
f
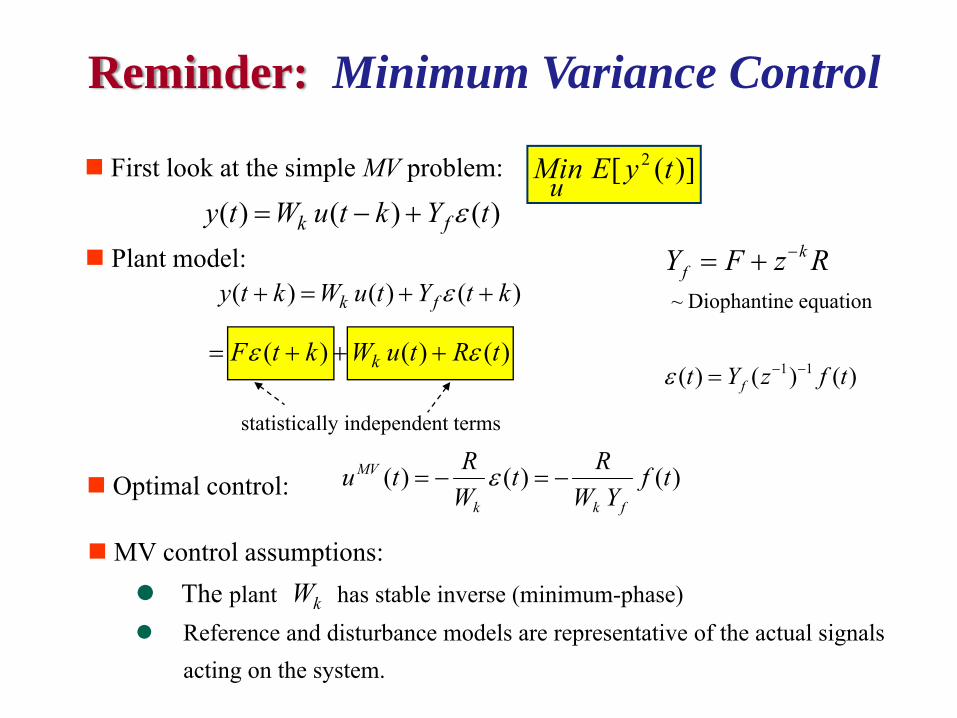
Reminder: Minimum Variance Control
First look at the simple MV problem: 2[ ( )]uMin E y t
( ) ( ) ( )k fy t k W u t Y t kε+ = + +
Optimal control: ( ) ( ) ( )MV
k k f
R Ru t t f tW W Y
ε= − = −
kfY F z R−= +
statistically independent terms
~ Diophantine equation
MV control assumptions:The plant has stable inverse (minimum-phase)Reference and disturbance models are representative of the actual signals acting on the system.
Plant model:
( ) ( ) ( )k fy t W u t k Y tε= − +
( ) ( ) ( )kF t k W u t R tε ε= + + +1 1( ) ( ) ( )ft Y z f tε − −=
kW

Nonlinear Generalised Minimum Variance Control
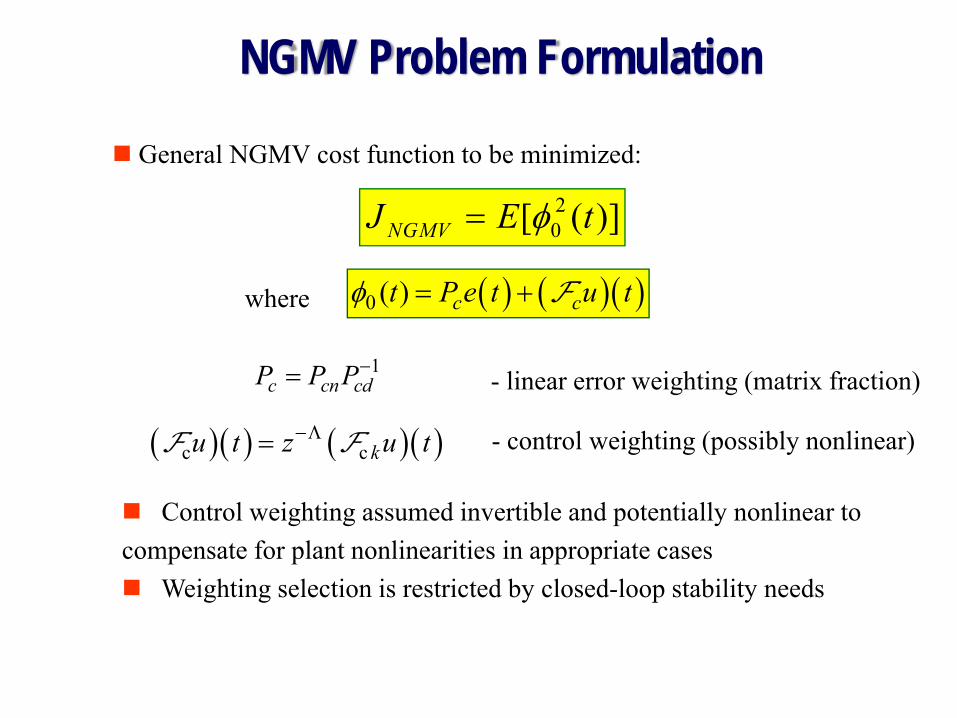
NGMV Problem Formulation
Control weighting assumed invertible and potentially nonlinear to compensate for plant nonlinearities in appropriate cases
Weighting selection is restricted by closed-loop stability needs
20[ ( )]NGMVJ E tφ=
( )( ) ( )( )c c ku t z u t−Λ=F F
1c cn cdP P P−= - linear error weighting (matrix fraction)
General NGMV cost function to be minimized:
where
- control weighting (possibly nonlinear)
( ) ( )( )0 ( ) c ct P e t u tφ = + F
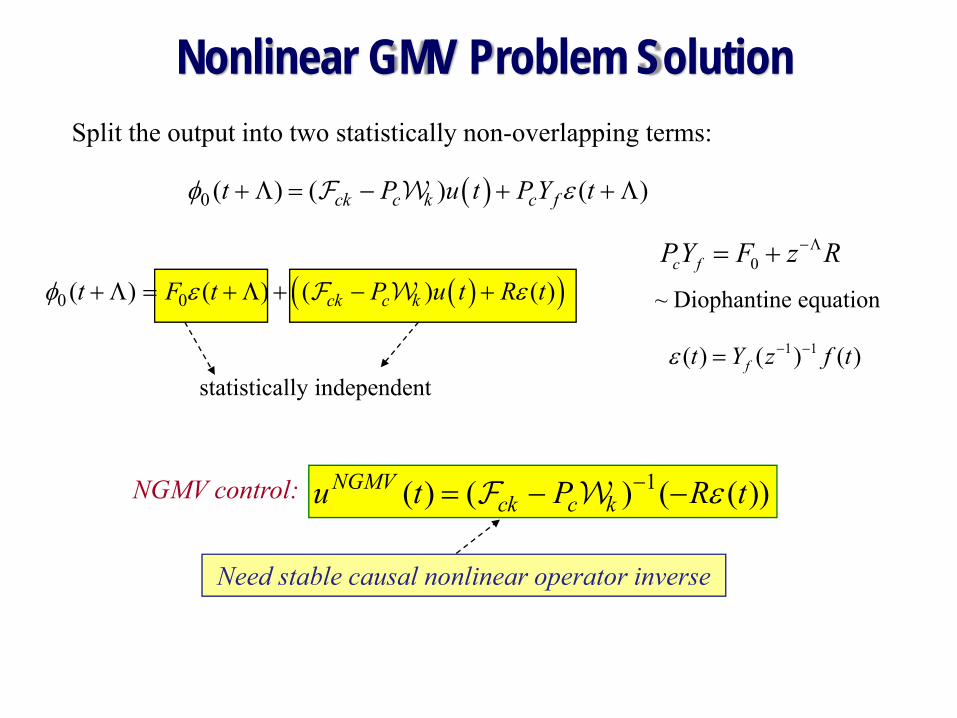
Nonlinear GMV Problem Solution
0c fPY F z R−Λ= +( )( )0 0( ) ( ) ( ) ( )ck c kt F t P u t R tφ ε ε+ Λ = + Λ + − +F W
statistically independent
1( ) ( ) ( ( ))NGMVck c ku t P R tε−= − −F W
Need stable causal nonlinear operator inverse
~ Diophantine equation
Split the output into two statistically non-overlapping terms:
NGMV control:
( )0 ( ) ( ) ( )ck c k c ft P u t P Y tφ ε+ Λ = − + + ΛF W
1 1( ) ( ) ( )ft Y z f tε − −=
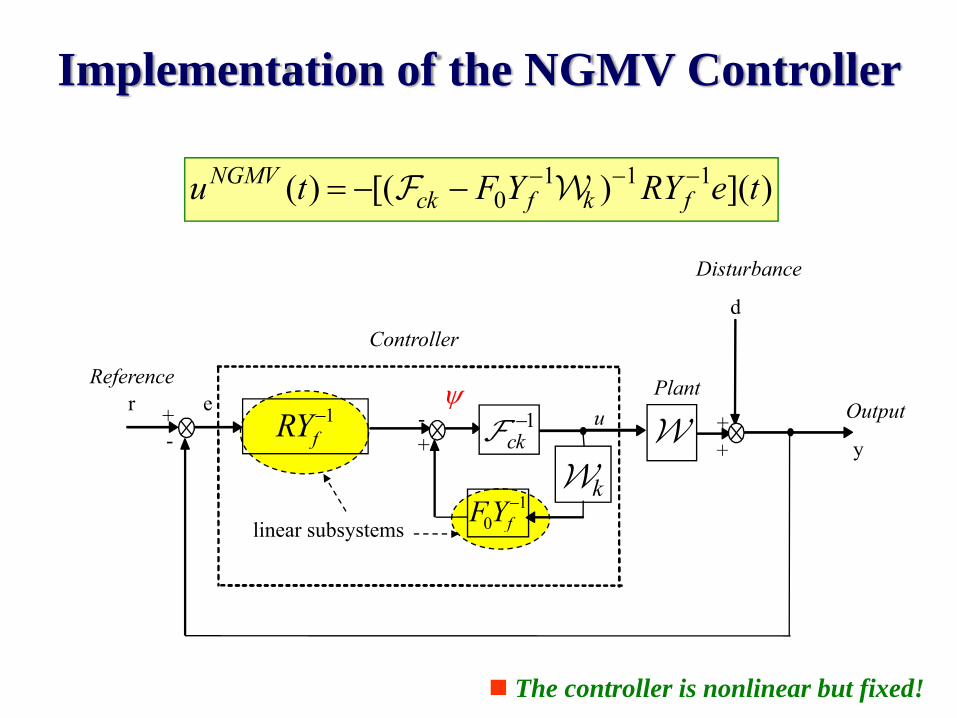
Implementation of the NGMV Controller
1 1 10( ) [( ) ]( )NGMV
ck f k fu t F Y RY e t− − −= − −F W
d
++u-
+
Controller
Disturbance
eReference
OutputPlant
y+-
r 1fRY− 1
ck−F
kWW
10 fFY−
linear subsystems
ψ
The controller is nonlinear but fixed!
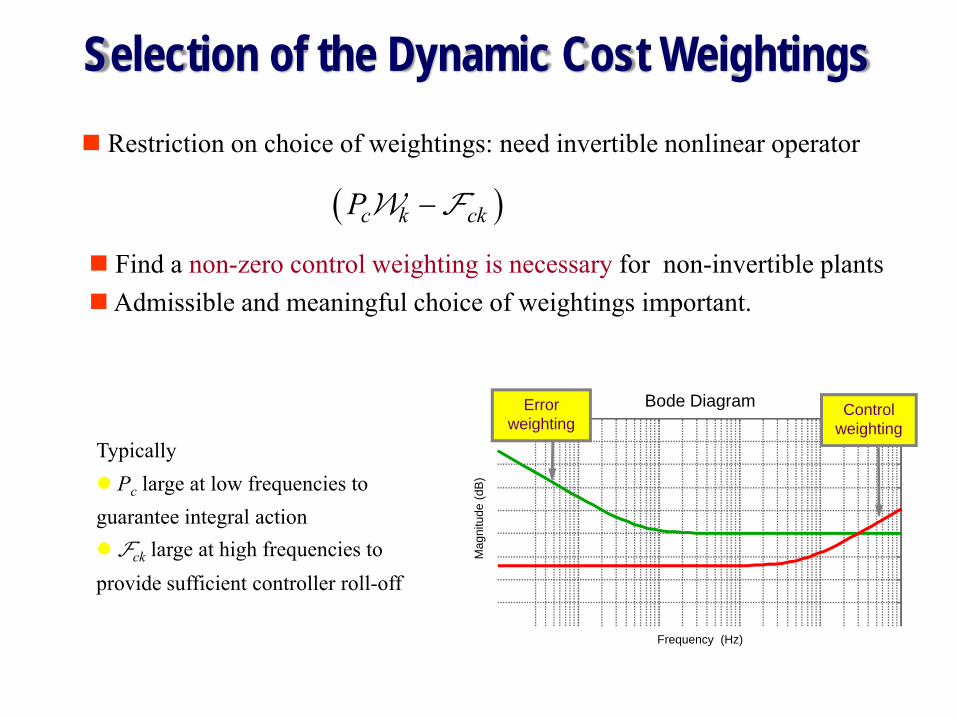
Selection of the Dynamic Cost WeightingsRestriction on choice of weightings: need invertible nonlinear operator
( )c k ckP −W F
Find a non-zero control weighting is necessary for non-invertible plantsAdmissible and meaningful choice of weightings important.
TypicallyPc large at low frequencies to
guarantee integral action Fck large at high frequencies to
provide sufficient controller roll-off
Mag
nitu
de (d
B)
Bode Diagram
Frequency (Hz)
Errorweighting
Controlweighting
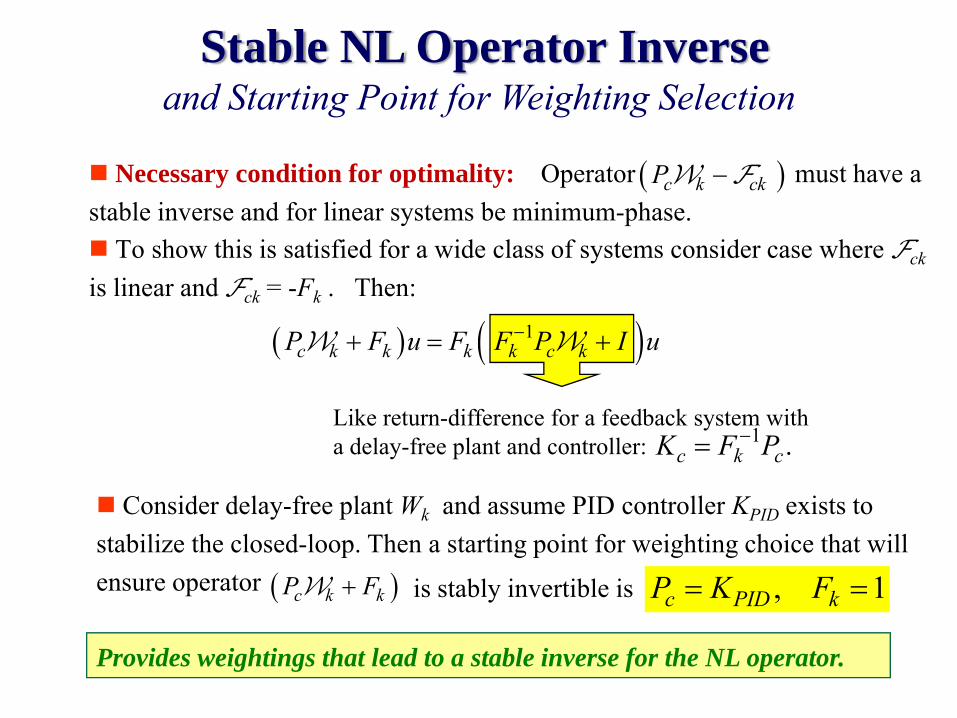
Necessary condition for optimality: Operator must have a stable inverse and for linear systems be minimum-phase.
To show this is satisfied for a wide class of systems consider case where Fck
is linear and Fck = -Fk . Then:
( )c k ckP −W F
( ) ( )1c k k k k c kP F u F F P I u−+ = +W W
1 .c k cK F P−=
Stable NL Operator Inverse and Starting Point for Weighting Selection
Like return-difference for a feedback system witha delay-free plant and controller:
Consider delay-free plant Wk and assume PID controller KPID exists to stabilize the closed-loop. Then a starting point for weighting choice that will ensure operator ( )c k kP F+W is stably invertible is , 1c PID kP K F= =
Provides weightings that lead to a stable inverse for the NL operator.
Predictive Controller For Nonlinear Processes:
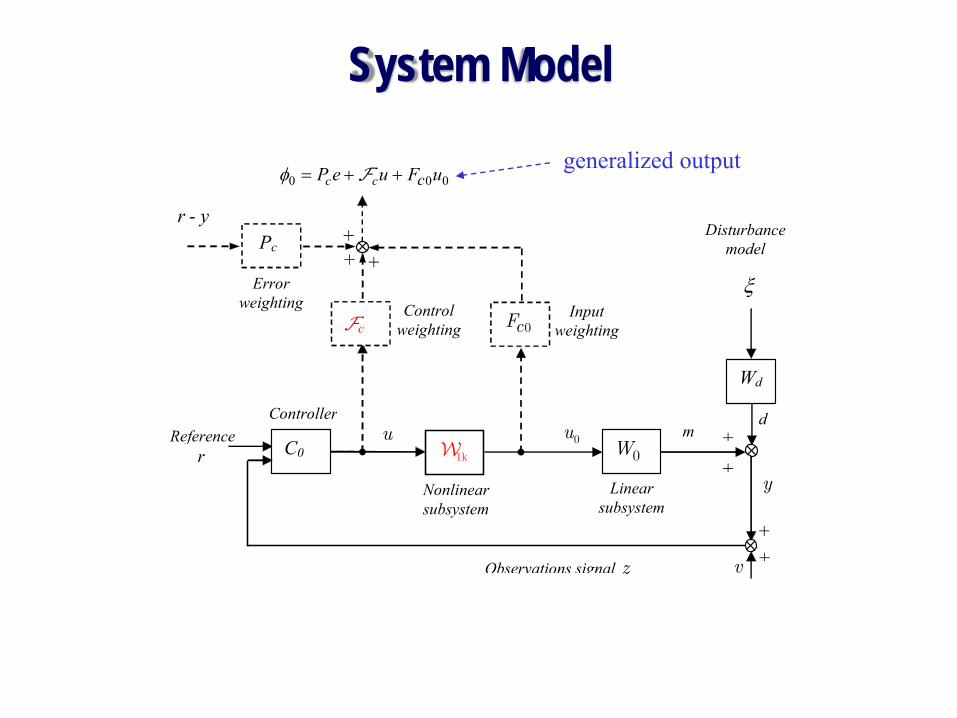
System Model
Disturbancemodel
0 0 0c c cP e u F uφ = + +F
v
Pc
Wd
r u
y
d
1kW
+
+m
Fc Control
weighting
Reference
Error weighting
+ξ
C0
Nonlinearsubsystem
Controller
0W0u
0cF
+
Input weighting
Linear subsystem
+
+
Observations signal z
+
-r y
generalized output
GPC Criterion
λ=
⎧ ⎫= + + + + + + +⎨ ⎬
⎩ ⎭∑ 2
0 00
e ( ) e ( ) ( ) ( ))N
T Tp p j
j
J E t j k t j k u t j u t j t
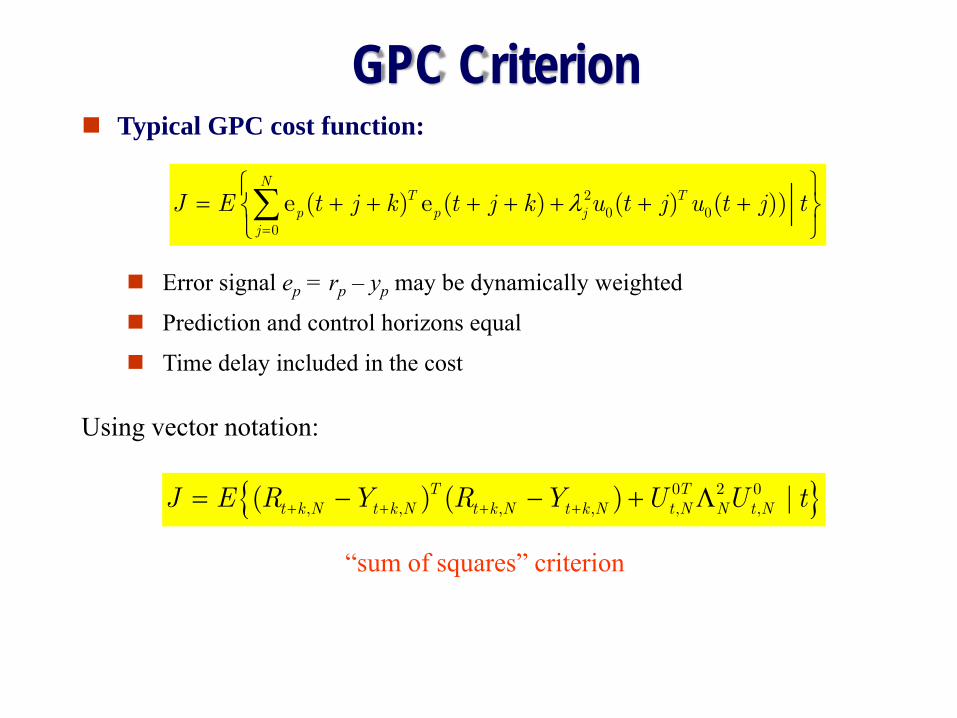
Typical GPC cost function:
Error signal ep = rp – yp may be dynamically weighted
Prediction and control horizons equal
Time delay included in the cost
{ }+ + + += − − + Λ0 2 0, , , , , ,( ) ( ) |T T
t k N t k N t k N t k N t N N t NJ E R Y R Y U U t
Using vector notation:
“sum of squares” criterion
Linear Subsystem Polynomial Matrix Models
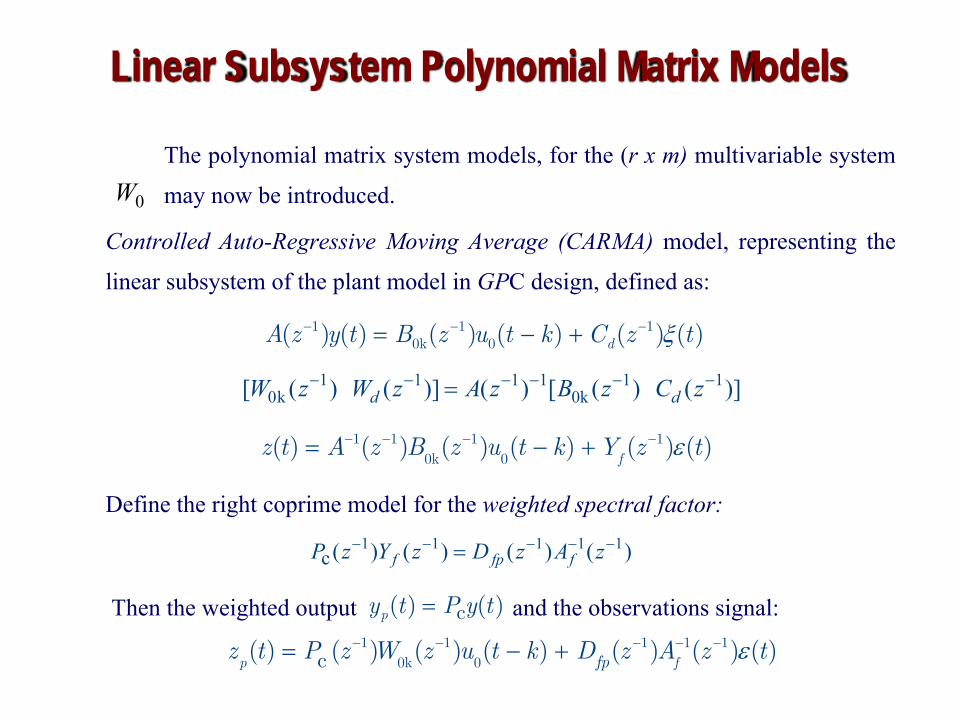
The polynomial matrix system models, for the (r x m) multivariable system
may now be introduced.
Controlled Auto-Regressive Moving Average (CARMA) model, representing the
linear subsystem of the plant model in GPC design, defined as:
Define the right coprime model for the weighted spectral factor:
Then the weighted output and the observations signal:
0W
ξ− − −= − +1 1 10k 0( ) ( ) ( ) ( ) ( ) ( )dA z y t B z u t k C z t
1 1 1 1 1 10k 0k[ ( ) ( )] ( ) [ ( ) ( )]d dW z W z A z B z C z− − − − − −=
ε− − − −= − +1 1 1 10k 0
( ) ( ) ( ) ( ) ( ) ( )f
z t A z B z u t k Y z t
1 1 1 1 1c( ) ( ) ( ) ( )f fp fP z Y z D z A z− − − − −=
ε− − − − −= − +1 1 1 1 10k 0c( ) ( ) ( ) ( ) ( ) ( ) ( )
p ffpz t P z W z u t k D z A z t
c( ) ( )py t P y t=
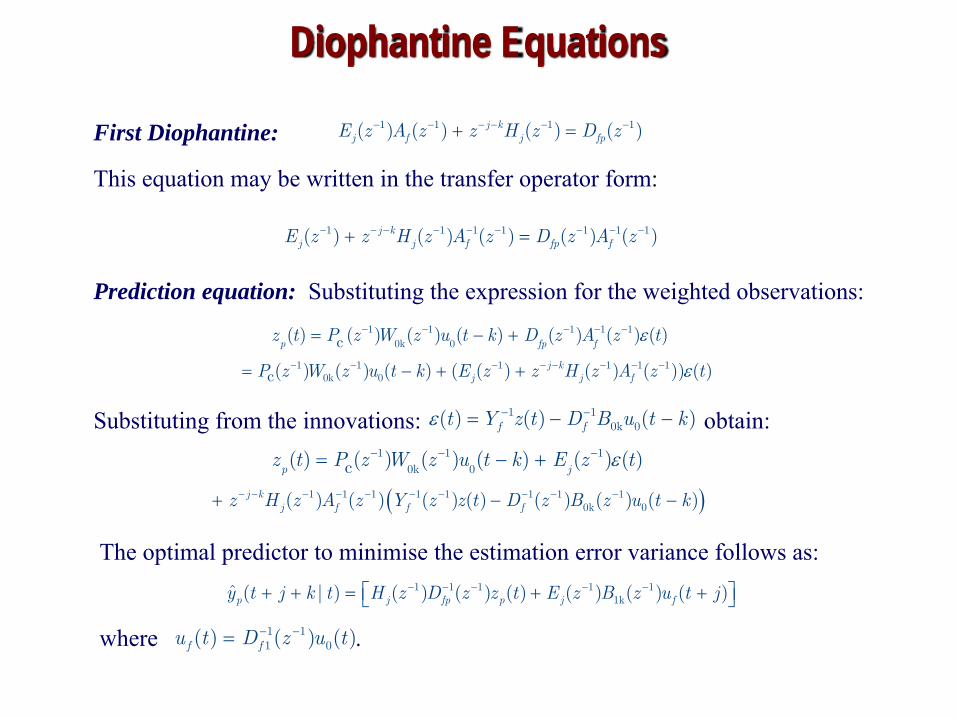
Diophantine Equations
First Diophantine:
This equation may be written in the transfer operator form:
Prediction equation: Substituting the expression for the weighted observations:
Substituting from the innovations: obtain:
1 1 1 1( ) ( ) ( ) ( )j kj f j fpE z A z z H z D z− − − − − −+ =
1 1 1 1 1 1 1( ) ( ) ( ) ( ) ( )j kj j f fp fE z z H z A z D z A z− − − − − − − − −+ =
ε− − − − −= − +1 1 1 1 10k 0c( ) ( ) ( ) ( ) ( ) ( ) ( )
p fp fz t P z W z u t k D z A z t
1 1 1 1 1 10k 0c( ) ( ) ( ) ( ( ) ( ) ( )) ( )j k
j j fP z W z u t k E z z H z A z tε− − − − − − − −= − + +
1 10k 0( ) ( ) ( )f ft Y z t D B u t kε − −= − −
ε− − −= − +1 1 10k 0c( ) ( ) ( ) ( ) ( ) ( )
p jz t P z W z u t k E z t
( )1 1 1 1 1 1 1 10k 0( ) ( ) ( ) ( ) ( ) ( ) ( )j k
j f f fz H z A z Y z z t D z B z u t k− − − − − − − − − −+ − −
The optimal predictor to minimise the estimation error variance follows as:
where .
1 1 1 1 11kˆ ( | ) ( ) ( ) ( ) ( ) ( ) ( )p j fp p j fy t j k t H z D z z t E z B z u t j− − − − −⎡ ⎤+ + = + +⎣ ⎦
1 11 0( ) ( ) ( )f fu t D z u t− −=
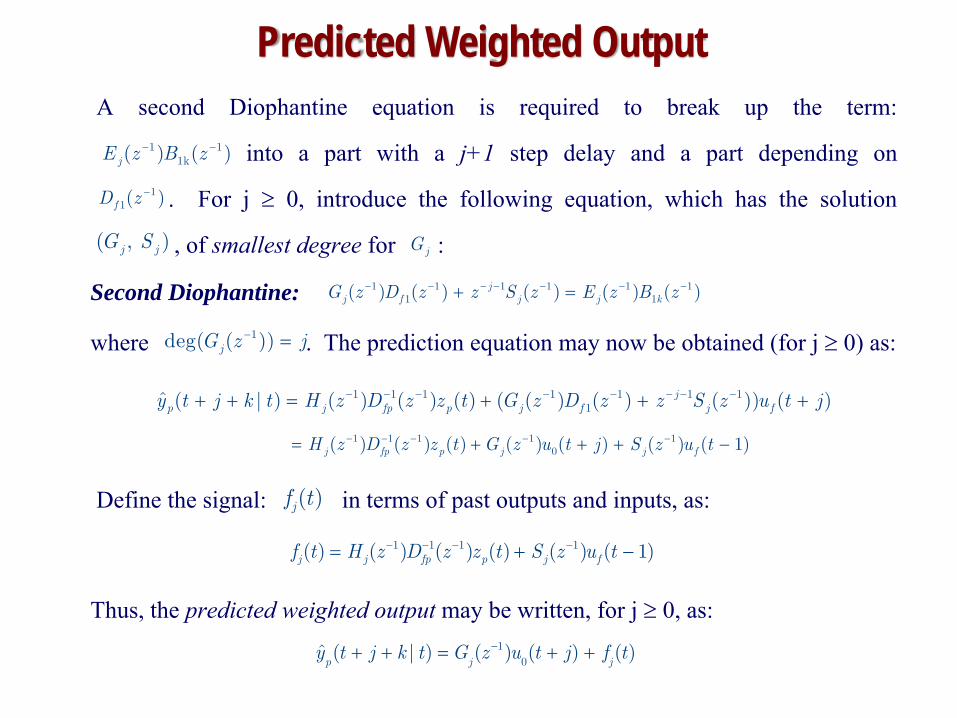
Predicted Weighted OutputA second Diophantine equation is required to break up the term:
into a part with a j+1 step delay and a part depending on
. For j ≥ 0, introduce the following equation, which has the solution
, of smallest degree for :
Second Diophantine:
where . The prediction equation may now be obtained (for j ≥ 0) as:
Define the signal: in terms of past outputs and inputs, as:
Thus, the predicted weighted output may be written, for j ≥ 0, as:
1 11k( ) ( )jE z B z− −
( , )j jG SjG
1 1 1 1 1 11 1( ) ( ) ( ) ( ) ( )j
j f j j kG z D z z S z E z B z− − − − − − −+ =
1deg( ( ))jG z j− =
1 1 1 1 1 1 11ˆ ( | ) ( ) ( ) ( ) ( ( ) ( ) ( )) ( )j
p j fp p j f j fy t j k t H z D z z t G z D z z S z u t j− − − − − − − −+ + = + + +
1 1 1 1 10( ) ( ) ( ) ( ) ( ) ( ) ( 1)j fp p j j fH z D z z t G z u t j S z u t− − − − −= + + + −
11( )fD z −
( )jf t
1 1 1 1( ) ( ) ( ) ( ) ( ) ( 1)j j fp p j ff t H z D z z t S z u t− − − −= + −
−+ + = + +10
ˆ ( | ) ( ) ( ) ( )p j jy t j k t G z u t j f t

Matrix Representation of the Prediction Equations
The future weighted outputs are to be predicted in the following section for
inputs computed in the interval: . The equation may therefore be
used to obtain the following vector equation for the weighted output at future times:
[ , ]t t Nτ ε +
0 0 0
1 0 0 1
1 0
1 0 0
ˆ 0 0 0( | ) ( ) ( )
0 0ˆ ( 1 | ) ( 1) ( )
ˆ ( | ) ( ) ( )
p
p
N Np N
gy t k t u t f t
g gy t k t u t f t
g g
g g gy t N k t u t N f t−
+⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥+ + +⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥= +⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥
+ + +⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦⎣ ⎦ ⎣ ⎦ ⎣ ⎦…

Vector Form of Prediction Equations
Introducing an obvious definition of terms for the matrices in the above
equation the vector form of the predicted weighted outputs may be written as:
The vector of free response predictions may also be written as:
0, , ,t̂ k N N t N t NY G U F+ = +
,t NF
1 10 00
1 11 1 11 1
1 1
( ) ( )( )
( ) ( ) ( )( ) ( ) ( 1)
( ) ( ) ( )
fp p f
N N N
H z S zf t
f t H z S zD z z t u t
f t H z S z
− −
− −
− −
− −
⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥
= = + −⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
1 1( ) ( ) ( ) ( 1)NZ p NZ fH z z t S z u t− −= + −
,t NF
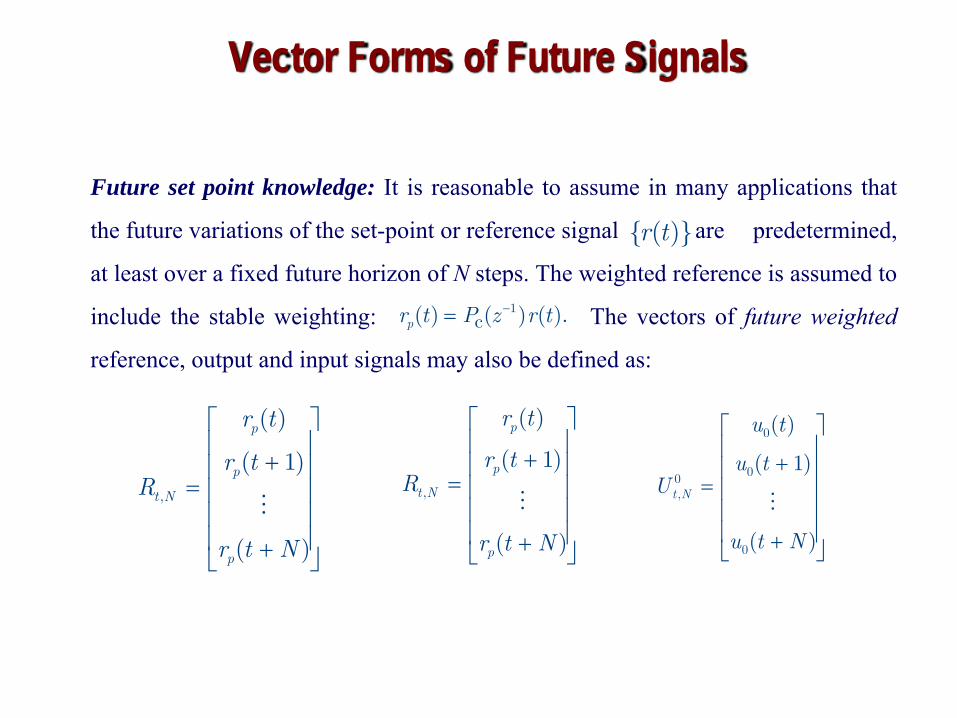
Vector Forms of Future Signals
Future set point knowledge: It is reasonable to assume in many applications that
the future variations of the set-point or reference signal are predetermined,
at least over a fixed future horizon of N steps. The weighted reference is assumed to
include the stable weighting: The vectors of future weighted
reference, output and input signals may also be defined as:
{ ( )}r t
1c( ) ( ) ( ).pr t P z r t−=
,
( )
( 1)
( )
p
p
t N
p
r t
r tR
r t N
⎡ ⎤⎢ ⎥
+⎢ ⎥= ⎢ ⎥⎢ ⎥⎢ ⎥+⎣ ⎦
,
( )
( 1)
( )
p
p
t N
p
r t
r tR
r t N
⎡ ⎤⎢ ⎥
+⎢ ⎥= ⎢ ⎥⎢ ⎥⎢ ⎥+⎣ ⎦
0
00,
0
( )
( 1)
( )
t N
u t
u tU
u t N
⎡ ⎤⎢ ⎥
+⎢ ⎥= ⎢ ⎥⎢ ⎥⎢ ⎥+⎣ ⎦
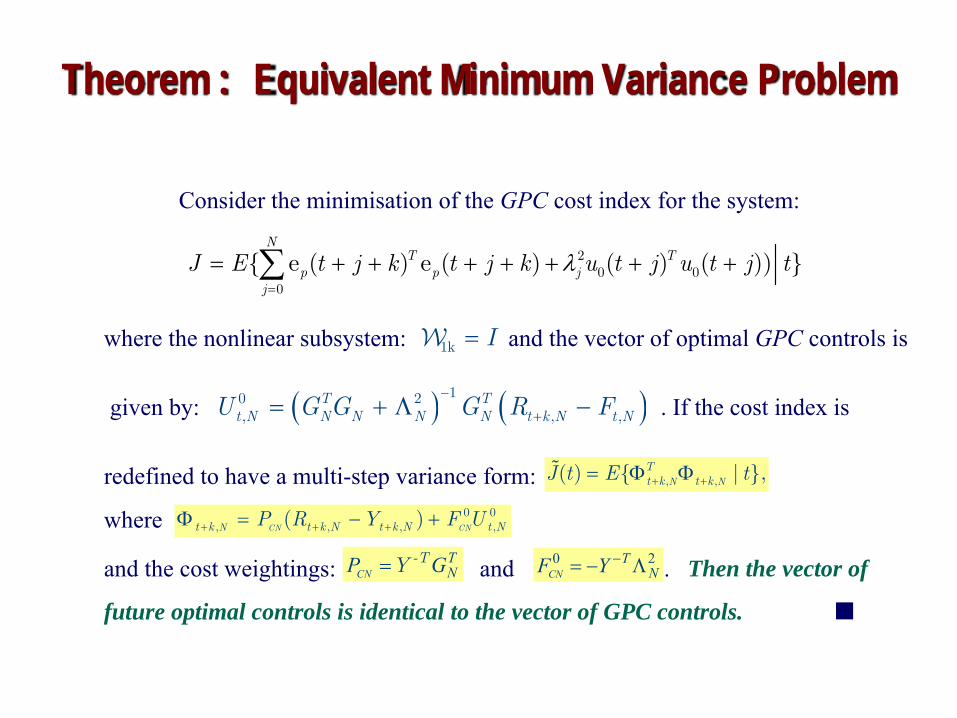
Theorem : Equivalent Minimum Variance Problem
Consider the minimisation of the GPC cost index for the system:
where the nonlinear subsystem: and the vector of optimal GPC controls is
given by: . If the cost index is
redefined to have a multi-step variance form:
where
and the cost weightings: and . Then the vector of
future optimal controls is identical to the vector of GPC controls. ■
, ,( ) { | },N NTt k t kJ t E t+ += Φ Φ
0 0, , , ,( )
CN CNNt k t k N t k N t NP R Y F U+ + +Φ = − +
0 2−= − ΛCNT
NF Y-TY=CNTNP G
1k I=W
λ=
= + + + + + + +∑ 20 0
0
{ e ( ) e ( ) ( ) ( )) }N
T Tp p j
j
J E t j k t j k u t j u t j t
( ) ( )10 2, , ,
T Tt N N N N N t k N t NU G G G R F
−
+= + Λ −
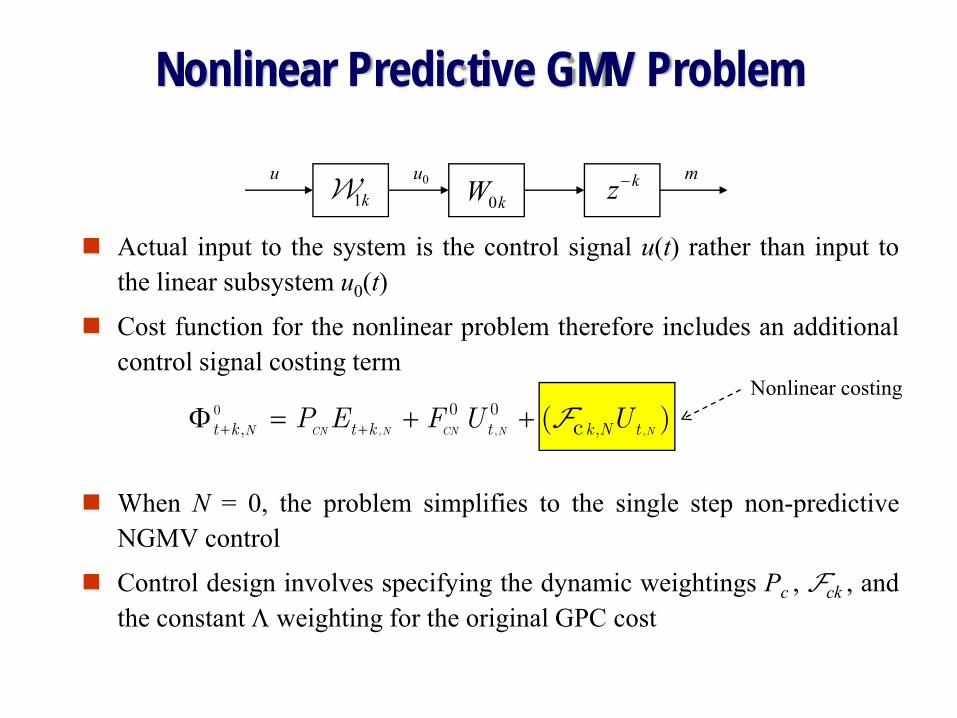
Nonlinear Predictive GMV Problem
Actual input to the system is the control signal u(t) rather than input tothe linear subsystem u0(t)
Cost function for the nonlinear problem therefore includes an additionalcontrol signal costing term
Nonlinear costing
+ +Φ = + +, , ,
0 0 0, ,c( )
CN N CN N NNt k t k t k N tP E F U UF
1kW 0kW kz−u0u m
When N = 0, the problem simplifies to the single step non-predictiveNGMV control
Control design involves specifying the dynamic weightings Pc , Fck , andthe constant Λ weighting for the original GPC cost

Let error weighting and the input weightings be specified and
assume the control signal weighting: where is full rank
and invertible. The multi-step cost-function:
The signal includes the vector of future error, input and control signal costing
terms: where the effective weightings :
, and may be a diagonal control weighting.
Define the constant matrix factor Y to satisfy then using the
receding horizon philosophy the control law:
or equivalently:
where the signals: and
ckF0 0, ,{ | }N N
Tp t k t kJ E t+ += Φ Φ
0{ ,..., }Nλ λ
( )( ) ( )( )c c= −ku t u t kF F
1( )cP z−
0,Nt k+Φ
, , ,
0 0 0, ,c( )
CN N CN N NNt k t k t k N tP E F U U+ +Φ = + + F
-TY=CNTNP G 0 2−= − ΛCN
TNF Y ,ck NF
= + Λ2TN
TN NY G GY
−+= − − −
,
1, 1k,N , ,c( ) ( )
N CNt k N t k N t NU Y P R FF W
( )+= − − −, ,
-1, , , 1k,Nc ( )
N CN Nt k N t k N t N tU P R F Y UF W
− −= + −t N NZ NZ fF H z z t S z u t1 1, ( ) ( ) ( ) ( 1)
− −= 1 11 0( ) ( ) ( ).f fu t D z u t
Theorem: NL Predictive GMV Control
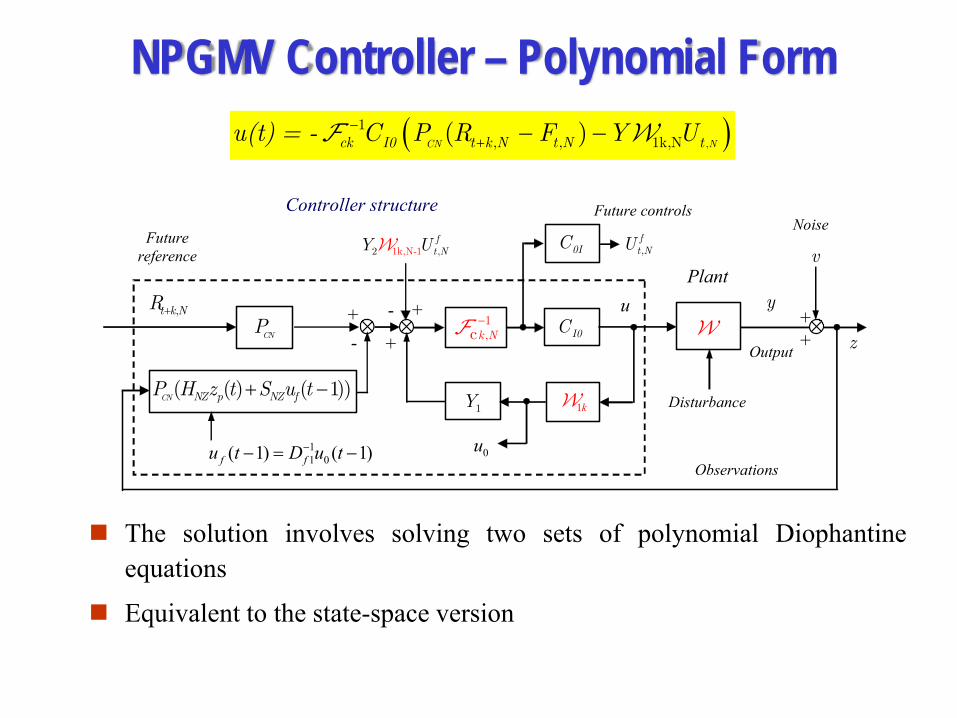
NPGMV Controller – Polynomial Form
Future
reference
+ ,t k NR
Future controls
Observations
u-
Controller structure
Disturbance
Plant
W + z
I0C−1,ck NF
0IC ,ft NU
1kW 1Y
CNP
( ( ) ( 1))CN NZ p NZ fP H z t S u t+ −
+- +
+
v
Noise
y
0u 11 0( 1) ( 1)−− = −f fu t D u t
Output
W1k,N-2 ,1ft NY U
+
( ),
1, , 1k,N( )
CN Nck I0 t k N t N tu(t) = - C P R F Y U−+ − −F W
The solution involves solving two sets of polynomial Diophantineequations
Equivalent to the state-space version
Robotics Application of Nonlinear Predictive Control
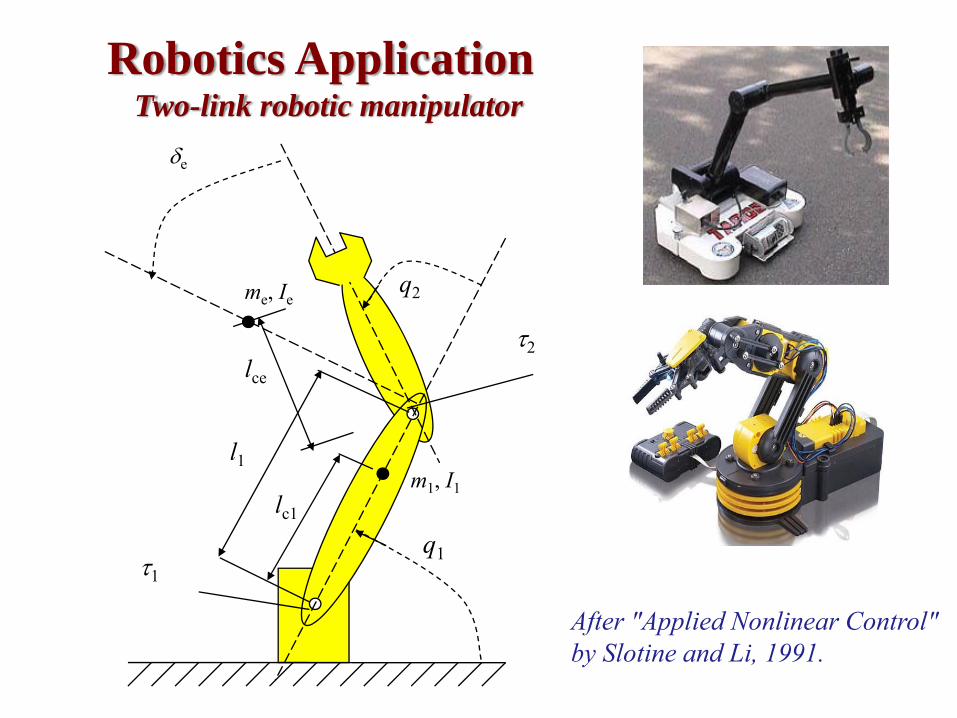
m1, I1
q1
q2
τ1
τ2
l1
lc1
lce
δe
me, Ie
Robotics Application Two-link robotic manipulator
After "Applied Nonlinear Control" by Slotine and Li, 1991.
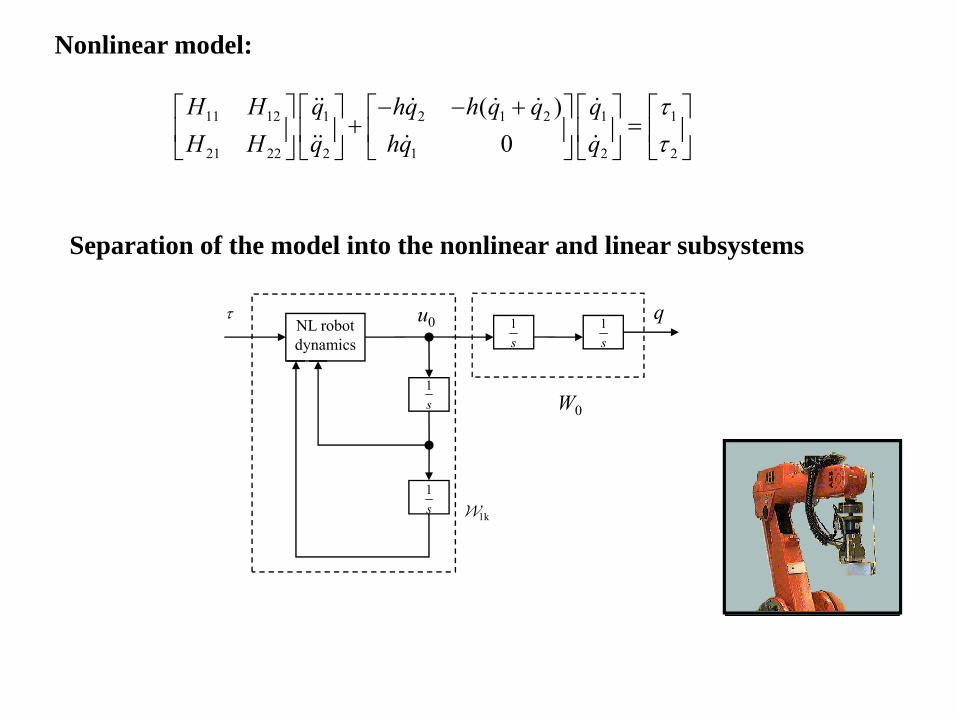
11 12 1 2 1 2 1 1
21 22 2 1 2 2
( )0
H H q hq h q q qH H q hq q
ττ
− − +⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤+ =⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦
Nonlinear model:
NL robotdynamics
qu0
W0
τ
W1k
1s
1s
1s
1s
Separation of the model into the nonlinear and linear subsystems

NPGMV controller structure for robot control

Position Control of the Two-link manipulator. NPGMV control with N = 0, 1, 3, 5 and Feedback linearization
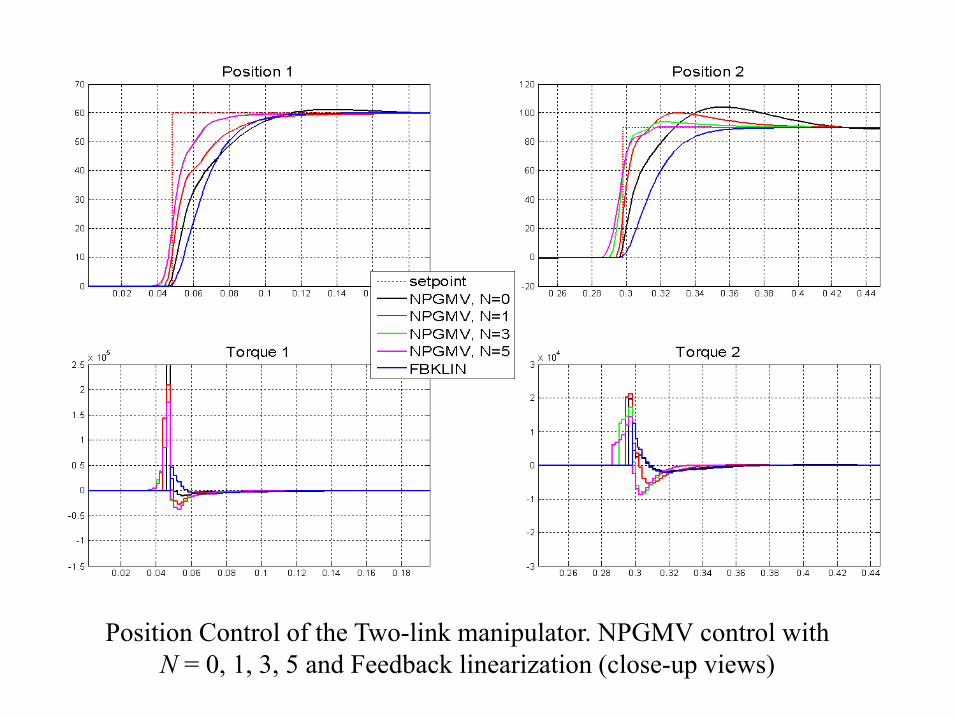
Position Control of the Two-link manipulator. NPGMV control with N = 0, 1, 3, 5 and Feedback linearization (close-up views)

Marine Systems Roll Stabilization Example
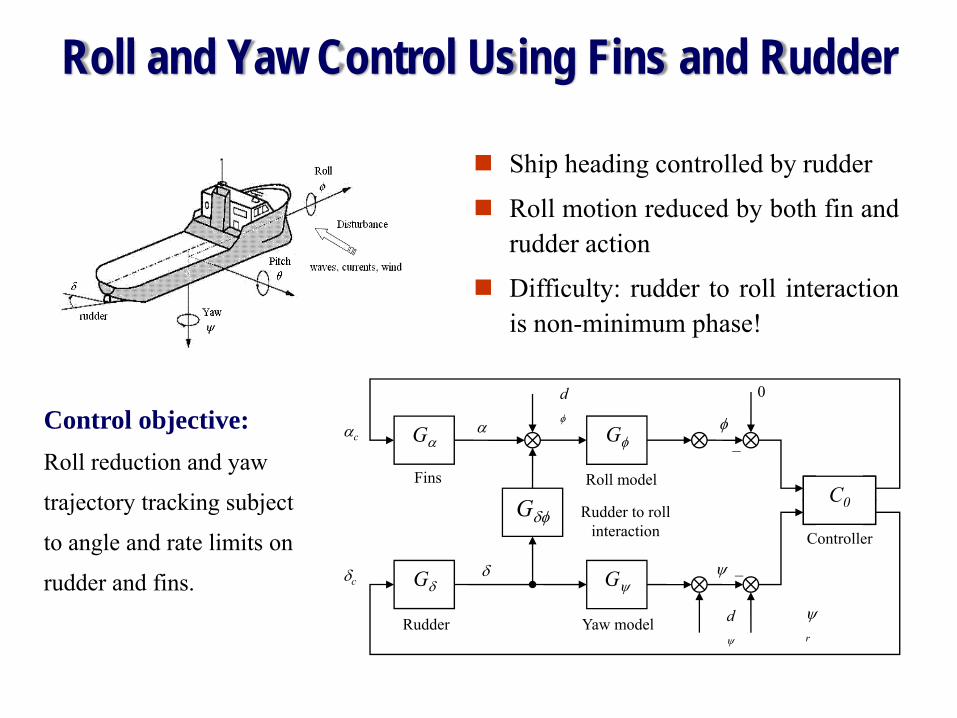
Roll and Yaw Control Using Fins and Rudder
Gφ
Gψ
Gδφ
Gδ
Gα
C0
φ
ψ
ψr
δδc
ααc
0
−
−
dφ
dψ
Fins
Rudder
Roll model
Yaw model
Rudder to roll interaction Controller
Ship heading controlled by rudder
Roll motion reduced by both fin andrudder action
Difficulty: rudder to roll interactionis non-minimum phase!
Control objective:Roll reduction and yaw
trajectory tracking subject
to angle and rate limits on
rudder and fins.

Ship Roll Stabilisation Problem
10-1
100
-10
-8
-6
-4
-2
0
2
4M
agni
tude
(dB)
Frequency (rad/sec)
~20 dB
< 5 dB(1) Achieve good roll stabilization(2) Do not hit rudder constraints(3) Keep the vessel on course
Compensate roll motion in a well-defined frequency band (0.3-1.2 rad/sec)
LF rejection may cause rudder angle saturation
HF rejection may cause rudder slew rate saturation
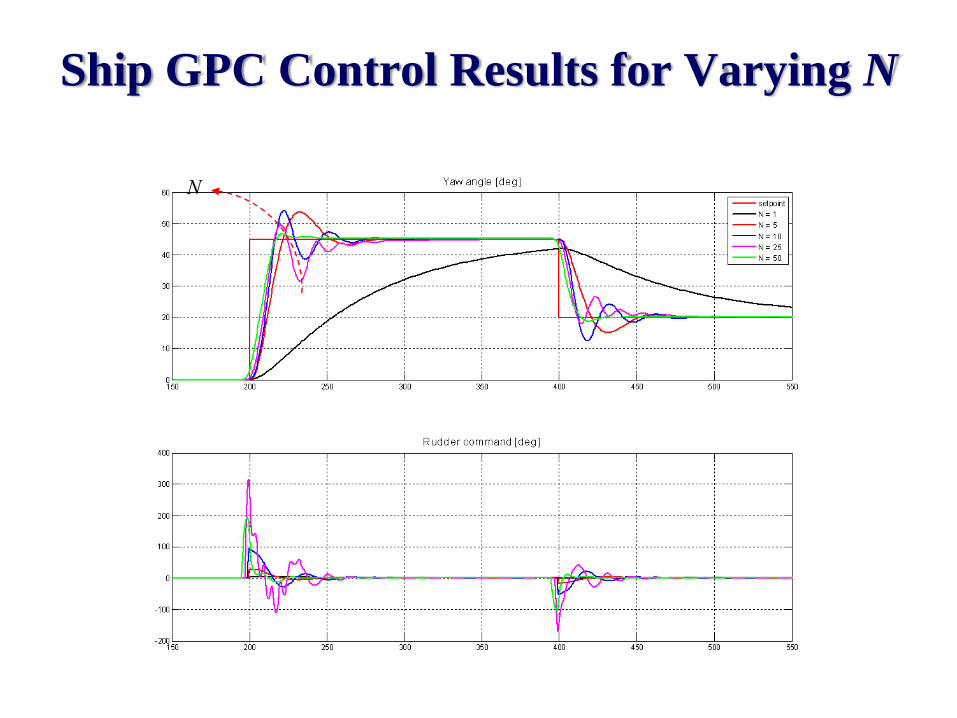
Ship GPC Control Results for Varying N
N

Example: GPC and NPGMV Results
Open Loop
GPC
NPGMV
Concluding Remarks
A practical NL controller must be simple but we need some mathematical basis to understand behavior. NGMV is a candidate and the patriarch for a family of more complicated and specialist solutions.The ability to handle black box models is important industrially.Nonlinear predictive is a model based fixed controller without uncertainty of linearization around a trajectory - so interesting.Extendable further to hybrid and/or complex systems.LabVIEW toolbox including new tools next !Dual Estimation problems equally interesting.
Nonlinear Book
Dr Pawel MajeckiIndustrial Control CentreUniversity of StrathclydeDepartment of Electronic and Electrical EngineeringGraham Hills Building50 George StreetGlasgow G1 1QE, UKE-mail: [email protected] No: +44 (0)141 552 4400 Extensions: 2378Direct Line No: +44 (0)141 548 2378Facsimile No: +44 (0)141 548 4203http://www.icc.strath.ac.uk
For new book on nonlinear control, to be published next year: M. J. Grimble and P. Majecki, Nonlinear Industrial Control,
Springer, Heidelberg, Germany 2009