research article parameter identifiability of ship...
TRANSCRIPT
Research ArticleParameter Identifiability of Ship ManoeuvringModeling Using System Identification
Weilin Luo12
1School of Mechanical Engineering and Automation Fuzhou University Fuzhou 350116 China2Fujian Province Key Laboratory of Structural Performances in Ship and Marine Engineering Fuzhou 350116 China
Correspondence should be addressed to Weilin Luo wlluofzugmailcom
Received 9 June 2016 Revised 17 October 2016 Accepted 19 October 2016
Academic Editor Laurent Mevel
Copyright copy 2016 Weilin Luo This is an open access article distributed under the Creative Commons Attribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
To improve the feasibility of system identification in the prediction of ship manoeuvrability several measures are presented to dealwith the parameter identifiability in the parametric modeling of ship manoeuvring motion based on system identification Drift ofnonlinear hydrodynamic coefficients is explained from the point of view of regression analysis To diminish the multicollinearityin a complicated manoeuvring model difference method and additional signal method are employed to reconstruct the samplesMoreover the structure of manoeuvring model is simplified based on correlation analysis Manoeuvring simulation is performedto demonstrate the validity of the measures proposed
1 Introduction
Prediction of ship manoeuvrability at the ship design stageis an important method for evaluating the manoeuvringperformances of ships [1] In general two ways are availableto obtain the manoeuvrability parameters (eg advancetransfer tactical diameter and overshoots) which includesimulation-free and simulation-based methods For thesimulation-free method one can obtain the manoeuvrabilityparameters directly from database full-scale trials or free-runningmodel tests For the simulation-basedmethod eithersystem based manoeuvring simulation or computationalfluid dynamics (CFD) based manoeuvring simulation can beemployed [2] No matter which kind of simulation is usedusually the ship manoeuvring model is indispensable whichalso determines the accuracy of the prediction ofmanoeuvra-bility Generally there are two ways to obtain a ship manoeu-vringmodelThemost usedway is determination of hydrody-namic derivatives (coefficients) in the mathematical modelof ship manoeuvring The second way is where artificialintelligence techniques are employed to obtain an implicitmodel (or so-called a black-box model) that describes theinput-output mapping characteristics of ship dynamicsExamples are the uses of artificial neural networks (ANN)[3 4] and support vector machines (SVM) [5 6]
To determine the hydrodynamic coefficients in the math-ematical model of shipmanoeuvring several methods can beused including database empirical formula captive modeltest CFD calculation and system identification (SI) com-binedwith free-runningmodel test or full-scale trials Amongthem the SI basedmethod provides an effective and practicalway to identify the hydrodynamic parameters in the shipmanoeuvring models When combined with free-runningmodel tests this method requires relatively low cost becauseit is easy to generate more manoeuvres after a first set offree-running model tests [2] When combined with full-scaletrials the so-called scale effects due to different Reynoldsnumbers between that of the ship model and full-scale can beavoided During last decades the SI based method has madegoodprogresses andmany techniques have beendeveloped inthe application to ship manoeuvring modeling Examples areleast squares (LS) regression [7 8] model reference method(MRM) [9 10] extend Kalman filter (EKF) [11 12] maximumlikelihood (ML) estimation [13 14] recursive predictionerror (RPE) method [15 16] frequency spectrum analysis(FSA) method [17 18] particle swarm optimization (PSO)[19 20] genetic algorithm (GA) [21 22] and support vectorregression (SVR) [23 24] Generally there have beenmany SIapplications to the parameter identification of ship manoeu-vring models
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2016 Article ID 8909170 10 pageshttpdxdoiorg10115520168909170
2 Mathematical Problems in Engineering
Like the other means to come to manoeuvring predic-tions SI has its own advantages and disadvantages whenapplied to ship manoeuvring modeling The main disadvan-tage is the problem of parameter identifiability It can beexplained from two aspects One kind of parameter identi-fiability is whether the parameters can be identified or notWhen solving a state space equation with respect to the shipmanoeuvring motion some parameters cannot be identifiedfor instance the added masses or acceleration derivatives nomatterwhat input-output samples are provided andnomatterwhich SI technique is adopted The other kind of parameteridentifiability is the effect of parameter drift The identifiedcoefficients might be not physically correct but be mathe-matically correct [2] which implies that even if the identifiedparameters deviate from their true values the manoeuvringmodel can predict the manoeuvring motion well comparedwith the test results However this prediction ability is usuallyrestricted to the prediction of the manoeuvre which providesthe data samples for system identification For example amanoeuvring model for a ship based on the identification of10∘10∘ zigzag manoeuvre can predict the same manoeuvrewell (ie 10∘10∘ zigzag manoeuvre) but fails when predictingother manoeuvres for instance 20∘20∘ zigzag manoeuvreor turning circle manoeuvres The effect of parameter drifthappens more frequently and severely for a complicated shipmanoeuvring model in which a number of hydrodynamiccoefficients are contained for instance the Abkowitz model
SI application to the modeling of ship manoeuvring hadever been widely studied in the 1980s with the developmentof SI techniques for instance the applications of EKFML andRPE Correspondingly the issues on parameter identifiabilitywere addressed and some measures had been proposed [1125 26] In the 1990s studies on the application of SI to the shipmanoeuvring had been paid relatively less attention to due toa new charming method (well known as the CFD method)and the limitations of test technology and SI techniques avail-able including the system observability the sensitivity to theinitial estimation of parameters andnoises and the parameteridentifiability especially the effect of parameter drift Withthe development ofmodernmeasurement equipment and theintroduction of advanced SI techniques SI based modelingof ship manoeuvring received renewed attention during thepast decade On one hand some classical SI techniques havebeen continuously applied and developed for instance theLS method [8] the EKF method [12] the RPE method [16]and some hybridmethods [27 28] On the other hand severalnovel and interesting SI methods have been proposed Rep-resentative examples are the artificial intelligence techniquesincluding PSO [19 20] GA [21 22] SVM [23 24] and ANN[29ndash31] However it should be noted thatmuchwork (includ-ing the work on classical SI or the work on new SI) concernedlittle about the problem of parameter identifiability especiallyfor the effect of parameter drift or avoided dealing withthe problem by selecting a simple manoeuvring model (egthe Nomoto model or the response model) in which theparameter drift is weak because few parameters are involved
In this paper some issues on the parameter identifiabilityare summarized Furthermore several measures to deal withthe identifiability problem are presented especially for the
diminishment of the parameter drift in the identificationof a complicated ship manoeuvring model the Abkowitzmodel Combined with free-runningmodel test results SVMbased system identification is employed to obtain the hydro-dynamic coefficients Based on the identified manoeuvringmodel manoeuvring simulation is conducted and predictionresults are comparedwith the test results which demonstratesthe validity of the proposed methods
2 Determination of Added Masses andAdded Moment of Inertia
Three kinds of models are available for the prediction of shipmanoeuvring including the Abkowitz model [32] the MMGmodel [33] and the response model [34] Comparativelythe first two models are frequently used because they give amore comprehensive understanding of the shipmanoeuvringmotion On the other hand a number of hydrodynamiccoefficients are contained in themodels whichmakes it chal-lenging to determine these coefficients accurately From thepoint of view of system identification one of the difficulties isthat not all coefficients can be identified
Taking a linear manoeuvring model as an example thestate space equation can be written as
[[[
119898 minus 119883 0 00 119898 minus 119884V 119898119909119866 minus 119884 1199030 119898119909119866 minus 119873V 119868119911119911 minus 119873 119903
]]]
[[[
V
119903]]]
= [[[
119883119906 0 00 119884V 119884119903 minus 11989811990600 119873V 119873119903 minus 1198981199091198661199060
]]]
[[[
119906V
119903]]]
+ [[[
0119884120575119873120575
]]]
120575(1)
where 119906 is the surge speed V is the sway speed 119903 is the yawrate 120575 is the rudder angle 119898 is the mass of the ship 119868119911119911 isthe moment of inertia of the ship 119909119866 longitudinal coordinateof the shiprsquos center of gravity 1199060 is the service speed of theship119883 et al are the hydrodynamic derivatives amongwhichthe acceleration derivatives minus119883 minus119884V minus119884 119903 minus119873V are named asthe added masses and minus119873 119903 is the added moment of inertiaDenote
119883 = [[[
119906V
119903]]]
119875 = [[[
119898 minus 119883 0 00 119898 minus 119884V 119898119909119866 minus 119884 1199030 119898119909119866 minus 119873V 119868119911119911 minus 119873 119903
]]]
119860 = [[[
119883119906 0 00 119884V 119884119903 minus 11989811990600 119873V 119873119903 minus 1198981199091198661199060
]]]
119861 = [[[
0119884120575119873120575
]]]
(2)
Mathematical Problems in Engineering 3
Table 1 Added masses and added moment of inertia (times10minus5)Coefficient Slender-body theory Captive model test1198831015840 minus399 minus421198841015840V minus728 minus7481198841015840119903 0 minus93541198731015840V 0 46461198731015840119903 minus607 minus438
Equation (1) can be written as
= 119875minus1119860119883 + 119875minus1119861120575 (3)
if 119875 is invertibleUsing SI two matrix combinations in (3) that is 119875minus1119860
and 119875minus1119861 can be determined however the three coefficientmatrices 119875 119860 and 119861 cannot be obtained separately Onesolution is to determine one coefficientmatrix first in anotherway for example the slender-body theory empirical formulacaptive model test or CFD calculation Usually but notalways the mass matrix 119875 is selected to be predeterminedin that the abovementioned methods have been successfullyapplied to determine the added masses and added momentof inertia for example [35ndash38] Among these methods theslender-body theory provides a simple but effective wayTable 1 lists the comparison results of nondimensional addedmasses and addedmoment of inertia between the calculationbased on slender-body theory [39] and captivemodel tests foraMariner ship [40] It is assumed that the ship is symmetricalabout 119910119911 plane in calculation as such 1198841015840119903 = 1198731015840V = 0
As can be seen from the comparison results the slender-body theory gives a satisfactory estimation of three importanthydrodynamic derivatives 1198831015840 1198841015840V and 1198731015840119903 Combined withfree-running model tests SVM based SI was used to identifythe hydrodynamic derivatives in an Abkowitz model exceptfor the added masses and added moment of inertia that wereobtained by slender-body method [24]
3 Parameter Drift andDiminishment Measures
Another kind of parameter identifiability referred to asthe parameter drift or simultaneous drift of parameters ismore difficult to deal with especially for the identificationof a complicated manoeuvring model such as an Abkowitzmodel or a nonlinearMMGmodel As aforementioned whenparameter drift happens the identified parameters might bemathematically correct but physically incorrect Even worsethe ldquomathematically correctrdquo parameters cannot be obtained
The reason for the drift of hydrodynamic coefficientshas not been made fully clear physically Hwang applied theslender-body theory to explain the mechanism of the drift oflinear hydrodynamic coefficients which is due to the dynamiccancellation [25] However for the drift of nonlinear hydro-dynamic coefficients it can only be explained from the pointof view of regression analysis not physically but statisticallyThe drift of nonlinear hydrodynamic coefficients is due tothe so-called multicollinearity [23] In fact many nonlinear
hydrodynamic coefficients in themathematical model of shipmanoeuvring motion have no clear physical meaning
31 Simultaneous Drift of Linear Hydrodynamic CoefficientsBrief explanation of the simultaneous drift of linear hydro-dynamic coefficients is given as follows More details can befound in [11 25]
For a slender ship moving on the horizontal plane theviscous sway force and yawmoment can be calculated as [39]
119884 = minus1212058812058711988921199060 (V + 1
2119871119903) 119873 = minus1
412058812058711988921198711199060 (V + 12119871119903)
(4)
where 120588 is the fluid density 119889 is the draft of the ship 1199060 is theservice speed of the ship assuming 119906 asymp 1199060 and 119871 the lengthof ship The above two expressions can be rewritten as
119884 = 119884VV + 119884119903119903119873 = 119873VV + 119873119903119903 (5)
in terms of hydrodynamic derivatives and motion variablesIt can be inferred that
119884V119884119903 = 119873V119873119903 = 2119871 (6)
During a ship manoeuvre the pivot of the ship is near to thebow therefore it follows that
V + 12119871119903 asymp 0 (7)
which indicates that
119884VV + 119884119903119903 asymp 0 (8)
119873VV + 119873119903119903 asymp 0 (9)
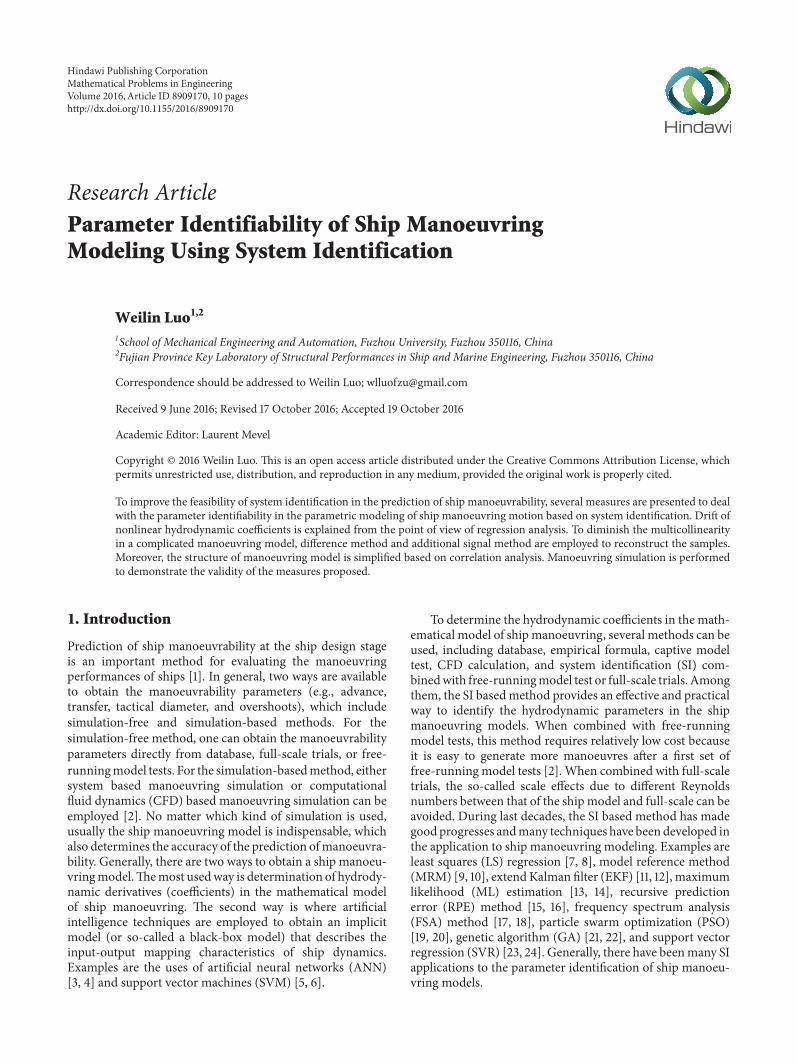
Combinedwith (6) it can be inferred that two pairs of param-eters that is 119884V and 119884119903 119873V and 119873119903 are allowed to becomelarger or smaller simultaneously Figure 1 presents the simu-lation results of nondimensional linear components of swayforce and yawmoment for the 10∘10∘ zigzag manoeuvre of aMariner vessel [40] As can be seen the sway force andyaw moment are small at the helming stage when rudderangle switches At the steady stage when rudder angle keepsunchanged the following approximations hold
1198841015840VV1015840 + 11988410158401199031199031015840 asymp 1198961119884101584012057512057510158401198731015840VV1015840 + 11987310158401199031199031015840 asymp 119896211987310158401205751205751015840
V1015840 asymp 119896312057510158401199031015840 asymp 11989641205751015840
(10)
where 1198961sim4 are constants Based on the above approximationstwo linear expressions can be obtained as
11989631198841015840V + 11989641198841015840119903 asymp 1198961119884101584012057511989631198731015840V + 11989641198731015840119903 asymp 11989621198731015840120575
(11)
4 Mathematical Problems in Engineering
Nondimensional linear Y-force componentstimes10minus3
100 200 300 400 500 6000t (sec)
minus15
minus1
minus05
0
05
1
15
Nondimensional linear N-moment components
N998400
998400+ N
998400
rr998400
N998400
120575120575998400
N998400
998400
N998400
rr998400
times10minus4
100 200 300 400 500 6000t (sec)
minus4
minus2
0
2
4
Y998400
998400+ Y
998400
rr998400
Y998400
120575120575998400
Y998400
998400
Y998400
rr998400
Figure 1 Nondimensional linear components of sway force and yawmoment for 10∘10∘ zigzag manoeuvre of aMariner vessel
which means that the elements within the parameter set1198841015840V 1198841015840119903 1198841015840120575 or 1198731015840V 1198731015840119903 1198731015840120575 possibly drift simultaneously
32 Drift of Nonlinear Hydrodynamic Coefficients From thepoint of view of regression analysis the drift of hydrodynamiccoefficients linear andor nonlinear results from the so-called multicollinearity It can be explained that if the inputvariables of a mathematical model are strongly linearlydependent on each other their corresponding coefficients inthe regressionmodelmight be incorrect even if the predictedresults based on the regression model do agree well withthe desired The case is more possible and serious especiallywhen the system contains a large number of parameters to beidentified Equations (8) and (9) present simple examples oflinear dependence It can be inferred that V and 119903 are linearlydependent on each other This implies that there existsmulticollinearity in themodel which results in the parameterdrift of 119884V and 119884119903 for (8) and 119873V and 119873119903 for (9)
It is noted that multicollinearity is a commonplace in theregression analysis [41] not a special effect that happens inthe system identification of shipmanoeuvringMoreover thisphenomenon cannot be eliminated but only moderated ordiminished because the input variables are always linearlydependent on each other more or less
It is important to assess the degree of multicollinearity ina system before diminishment measures are taken Commonused assessment tools include 119865- and 119905-tests Variance Infla-tion Factor (VIF) or tolerance (reciprocal ofVIF) eigenanaly-sis determination coefficient and correlation coefficientThe
last method provides a simple and effective way Using thismethod a correlation coefficient between two variables 1199091and 1199092 can be defined as
12058811990911199092
= cov (1199091 1199092)radic119863 (1199091)119863 (1199092)
(12)
where 119863(1199091) and 119863(1199092) denote the variance and cov (1199091 1199092)denotes the covariance Usually the nearer to one the absolutevalue of 120588119909
11199092
approximates the more serious the lineardependence between 1199091 and 1199092 is An example is given withrespect to a nonlinear ship manoeuvring model in which thenondimensional yaw-equation can be described as
(11989810158401199091015840119866 minus 1198731015840V) ΔV1015840 + (1198681015840119911119911 minus 1198731015840119903) Δ 1199031015840= Δ11989110158403 (Δ1199061015840 ΔV1015840 Δ1199031015840 Δ1205751015840) (13)
where Δ1199061015840 ΔV1015840 Δ1199031015840 and Δ1205751015840 are small perturbations fromnominal values of surge speed sway speed yaw rate andrudder angle respectivelyThe nonlinear functionΔ11989110158403 on theright-hand side of (13) can be expressed as [42]
Δ11989110158403 = 1198731015840VΔV1015840 + 1198731015840119903Δ1199031015840 + 1198731015840120575Δ1205751015840 + 1198731015840|V|V 10038161003816100381610038161003816ΔV101584010038161003816100381610038161003816 ΔV1015840+ 1198731015840|V|119903 10038161003816100381610038161003816ΔV101584010038161003816100381610038161003816 Δ1199031015840 + 1198731015840|119903|119903 10038161003816100381610038161003816Δ119903101584010038161003816100381610038161003816 Δ1199031015840+ 1198731015840V|119903|ΔV1015840 10038161003816100381610038161003816Δ119903101584010038161003816100381610038161003816 + 1198731015840120575120575120575Δ12057510158403 + 1198731015840VV120575ΔV10158402Δ1205751015840+ 1198731015840VV120575ΔV1015840Δ12057510158402 + 1198731015840119903120575120575Δ1199031015840Δ12057510158402 + 1198731015840119903119903120575Δ11990310158402Δ1205751015840+ 1198731015840119903V120575Δ1199031015840ΔV1015840Δ1205751015840 + 11987310158400
(14)
Combined with the test data of 25∘5∘ zigzag manoeuvre ofa KVLCC2 ship which was conducted in the Hamburg ShipModel Basin (HSVA) the correlation coefficients of variablesin (14) can be calculated as listed in Table 2 As can be seenthe degree of linear dependence is heavy for some variablesfor instance ΔV1015840 and ΔV1015840Δ12057510158402 with the correlation coefficient099 A heavymulticollinearitymight exist with respect to thesystem (14) which results in the parameter drift not only forthe linear parameters but also the nonlinear parameters
33 Measures to Diminish the Drift of Hydrodynamic Coeffi-cients From the above discussion it can be concluded thatmulticollinearity is the main reason for the drift of hydrody-namic coefficients especially for the nonlinear onesThereforethe alleviation of multicollinearity is vital for the diminish-ment of parameter drift
Several remedies are available to moderate the degree ofmulticollinearity for instance difference method pruning-variable method [43] principal component regression (PCR)analysis [44] partial least squares (PLS) [45] and a groupmethod of data handling (GMDH) [46] Some of them weredeveloped to diminish the drift of hydrodynamic coefficientsFor example Hwang proposed parallel processing exagger-ated over- and underestimation parameter transformation tomoderate the drift of linear hydrodynamic coefficients [25]
Mathematical Problems in Engineering 5
Table 2 Matrix of correlation coefficients
1198731015840V 1198731015840119903 1198731015840|V|V 1198731015840|V|119903 1198731015840120575 1198731015840120575120575120575 1198731015840V120575120575 1198731015840VV120575 1198731015840|119903|119903 1198731015840V|119903| 1198731015840119903120575120575 1198731015840119903119903120575 1198731015840119903V1205751198731015840V 100 045 098 067 091 092 099 097 039 084 054 054 0681198731015840119903 100 042 084 053 054 047 043 097 066 091 075 0811198731015840|V|V 100 066 083 085 098 100 032 077 050 042 0671198731015840|V|119903 100 062 064 068 066 075 087 092 073 1001198731015840120575 100 099 091 083 050 083 061 071 0621198731015840120575120575120575 100 092 085 050 083 062 069 0641198731015840V120575120575 100 098 040 083 055 053 0691198731015840VV120575 100 033 077 050 042 0671198731015840|119903|119903 100 062 086 081 0721198731015840V|119903| 100 078 082 0891198731015840119903120575120575 100 083 0911198731015840119903119903120575 100 0731198731015840119903V120575 100
For nonlinear hydrodynamic coefficients ridge regressionand modification of input scenario were proposed [47 48]However for given samples from real manoeuvring testssuch a modification of excitation might be not applicable inother words this approach might only work for simulationdata
Since the multicollinearity is an inherent characteristicof a regression model besides the regression tool (eg LSand EKF) modification of the model is a direct and effectiveway to alleviate the multicollinearity which can be achievedby altering the structure of the model and reconstructing theinput variables in the model with the aim to decrease thelinear dependence of variables Based on these ideas threeapproaches are presented to diminish the drift of hydrody-namic coefficients including simplification of the manoeu-vring model difference of the samples and the method ofadditional signal Studies are performed mainly combinedwith the Abkowitz model
331 Simplification of the Manoeuvring Model Although theAbkowitz model is often preferred in the prediction of shipmanoeuvring such a ldquolargerdquo parametric system makes itinconvenient to use in practice Actually some nonlinearderivatives are difficult to be determined although they couldbe unimportant In practical application of the Abkowitzmodel simplification had been performed to improve thefeasibility of this model Examples are the work by Abkowitz[11] and Norrbin Nils [37] Physical meanings were the mainconcern in the simplification The simplification can also beperformed from the point of view of regression analysis [24]Taking the yaw-equation (13) as an example the originalexpression of (14) is
Δ11989110158403 = 11987310158400119906Δ1199061015840 + 11987310158400119906119906Δ11990610158402 + 1198731015840VΔV1015840 + 1198731015840119903Δ1199031015840+ 1198731015840120575Δ1205751015840 + 1198731015840VVVΔV10158403 + 1198731015840120575120575120575Δ12057510158403+ 1198731015840VV119903ΔV10158402Δ1199031015840 + 1198731015840VV120575ΔV10158402Δ1205751015840 + 1198731015840V120575120575ΔV1015840Δ12057510158402
+ 1198731015840120575119906Δ1205751015840Δ1199061015840 + 1198731015840V119906ΔV1015840Δ1199061015840 + 1198731015840119903119906Δ1199031015840Δ1199061015840+ 1198731015840120575119906119906Δ1205751015840Δ11990610158402 + 1198731015840119903119903119903Δ11990310158403 + 1198731015840V119903119903ΔV1015840Δ11990310158402+ 1198731015840V119906119906ΔV1015840Δ11990610158402 + 1198731015840119903119906119906Δ1199031015840Δ11990610158402 + 1198731015840119903120575120575Δ1199031015840Δ12057510158402+ 1198731015840119903119903120575Δ11990310158402Δ1205751015840 + 1198731015840119903V120575Δ1199031015840ΔV1015840Δ1205751015840 + 11987310158400
(15)
in which 22 hydrodynamic coefficients are contained [40]To simplify it all the nonlinear terms related to the surgeperturbation Δ1199061015840 are eliminated for two reasons First sincethe ship total velocity 119880(119905) is taken as the nondimensionalfactor the effect of velocity loss has been taken into account inevery velocity term Second the linear dependence betweenthe linear and nonlinear terms relating to Δ1199061015840 is significantwhichwill result in the parameter drift For example the thirdand twelfth terms on the right hand side of (15) at the 119896thsampling time can be written as
1198731015840VΔV (119896) 119880 (119896) + 1198731015840V119906ΔV (119896) Δ119906 (119896) (16)
by considering the prime nondimensional definition
Δ1199061015840 = Δ119906119880
Δ1015840 = Δ(1198802119871)
(17)
For moderate manoeuvres it holds that
119880 (119896) asymp 1199060 + Δ119906 (119896) (18)
The expression (16) can be written as
1198731015840VΔV (119896) 1199060 + 1198731015840VΔV (119896) Δ119906 (119896) + 1198731015840V119906ΔV (119896) Δ119906 (119896) (19)
Obviously the second term is linearly dependent on thethird term In consideration of the significance of the linearderivative1198731015840V the nonlinear term1198731015840V119906ΔV(119896)Δ119906(119896) is removed
6 Mathematical Problems in Engineering
In the same way the other six terms related to the derivatives11987310158400119906119906 1198731015840120575119906 1198731015840119903119906 1198731015840120575119906119906 1198731015840V119906119906 and 1198731015840119903119906119906 can be removed from(15) Ignoring the effect of surge speed 119906 on the change of yawmoment 11987310158400119906Δ1199061015840 can be removed furthermore Finally byintroducing the cross flow models to replace the third-ordernonlinear terms model (15) is simplified to model (14) withthe number of hydrodynamic coefficients decreasing from 22to 14
Sensitivity analysis provides another way to simplify themathematical model of ship manoeuvring [49ndash53] Usingthis method the effect of the hydrodynamic coefficient onthe prediction of ship manoeuvring is studied by observingthe change of manoeuvring (eg velocity angular velocityadvance transfer overshoots and tactical diameter) to thechange of hydrodynamic coefficients Based on the results ofsensitivity analysis some trivial hydrodynamic coefficientsare removed from the mathematical model The main diffi-culties with this method are the determination of two factors(i) the criteria of importance for a hydrodynamic coefficientwhich decides this coefficient will be retained or removedfrom the model (ii) the reference value of a hydrodynamiccoefficient when the real experimental data are used foridentification instead of the simulation data
332 Difference Method Besides simplification of the math-ematical model of ship manoeuvring reconstruction of theinput variables or samples provides another effective way toalleviate the parameter drift It is noted that such a recon-struction does not require a new manoeuvring to obtain newinput-output samples for system identification butmodify theobtained samples Difference method provides a simple wayto reconstruct the samples [24]
Taking (13) as an example the following discrete equationcan be obtained
Δ119903 (119896 + 1) = Δ119903 (119896) + 1205791ΔV (119896) 119880 (119896) + 1205792Δ119903 (119896)119880 (119896)+ 1205793Δ120575 (119896)1198802 (119896) + 1205794 |ΔV (119896)| ΔV (119896)+ 1205795 |ΔV (119896)| Δ119903 (119896) + 1205796 |Δ119903 (119896)| Δ119903 (119896)+ 1205797ΔV (119896) |Δ119903 (119896)| + 1205798Δ1205753 (119896)1198802 (119896)+ 1205799ΔV2 (119896) Δ120575 (119896)+ 12057910ΔV (119896) Δ1205752 (119896) 119880 (119896)+ 12057911Δ119903 (119896) Δ1205752 (119896) 119880 (119896)+ 12057912Δ1199032 (119896) Δ120575 (119896)+ 12057913Δ119903 (119896) ΔV (119896) Δ120575 (119896) + 120579141198802 (119896)
(20)
where 1205791sim14 are the linear combinations of the hydrodynamiccoefficients with respect to the sway and yaw motion [23]Define vectorsΘ = [1205791 1205792 12057914]14times1 X (119896) = [ΔV (119896) 119880 (119896) Δ119903 (119896)119880 (119896) Δ120575 (119896)
sdot 1198802 (119896) |ΔV (119896)| ΔV (119896) |ΔV (119896)| Δ119903 (119896) |Δ119903 (119896)|
sdot Δ119903 (119896) ΔV (119896) |Δ119903 (119896)| Δ1205753 (119896) 1198802 (119896) ΔV2 (119896)sdot Δ120575 (119896) ΔV (119896) Δ1205752 (119896)119880 (119896) Δ119903 (119896) Δ1205752 (119896)sdot 119880 (119896) Δ1199032 (119896) Δ120575 (119896) Δ119903 (119896) ΔV (119896)sdot Δ120575 (119896) 1198802 (119896)]119879
14times1
(21)
Equation (20) can be rewritten as
Δ119903 (119896 + 1) = Δ119903 (119896) +ΘX (119896) (22)
At a neighbour sampling time the above equation becomes
Δ119903 (119896) = Δ119903 (119896 minus 1) +ΘX (119896 minus 1) (23)
Combined with (22) the following equality holds
119911 (119896) = 119911 (119896 minus 1) +ΘY (119896 minus 1) (24)
by definition of
119911 (119896) = Δ119903 (119896 + 1) minus Δ119903 (119896) Y (119896 minus 1) = X (119896) minus X (119896 minus 1) (25)
Comparing (23) with (24) it can be seen that although theinput-output pair are altered the coefficient matrix remainsthe same Usually if the degree of linear dependence of inputvariables in the original system is serious it could be mod-erated after difference of samples As a comparison Table 3lists the correlation coefficients after the difference method isemployed as shown below the principal diagonal (elementsabove the principal diagonal are the correlation coefficientswithout difference method shown in Table 2) As can beseen the linear dependence of the input variables has beenobviously decreased
333 Additional Signal Besides the difference methodanother approach to reconstruct the input-output samplescan be used which refers to the method of additional signalSuch a method had been successfully applied to the identifi-cation of shipmanoeuvring by analyzing simulation data [23]and captive model test results [54] Taking the system (22) asan example an additional ramp signal can be designed as
119910119886 (119896 + 1) = 119910119886 (119896) + 120582 (26)
where 120582 is a constant Adding this signal to (22) a newparameter system can be obtained as
[Δ119903 (119896 + 1) + 119910119886 (119896 + 1)]= [Δ119903 (119896) + 119910a (119896)] +ΘX (119896) + 120582 (27)
where the output variable and the first input variable changehowever the parameter matrix Θ related to hydrodynamiccoefficients does not The additional signal can be viewed asan additional excitation to the original system As a result themanoeuvring characteristics of the original system which
Mathematical Problems in Engineering 7
Table 3 Comparison of correlation coefficients using difference method
1198731015840V 1198731015840119903 1198731015840|V|V 1198731015840|V|119903 1198731015840120575 1198731015840120575120575120575 1198731015840V120575120575 1198731015840VV120575 1198731015840|119903|119903 1198731015840V|119903| 1198731015840119903120575120575 1198731015840119903119903120575 1198731015840119903V1205751198731015840V 100 045 098 067 091 092 099 097 039 084 054 054 0681198731015840119903 044 100 042 084 053 054 047 043 097 066 091 075 0811198731015840|V|V 083 031 100 066 083 085 098 100 032 077 050 042 0671198731015840|V|119903 034 021 038 100 062 064 068 066 075 087 092 073 1001198731015840120575 064 044 023 001 100 099 091 083 050 083 061 071 0621198731015840120575120575120575 050 033 025 013 074 100 092 085 050 083 062 069 0641198731015840V120575120575 084 041 077 036 048 066 100 098 040 083 055 053 0691198731015840VV120575 081 031 099 039 022 029 082 100 033 077 050 042 0671198731015840|119903|119903 034 088 003 007 054 035 028 004 100 062 086 081 0721198731015840V|119903| 057 027 021 046 058 041 040 019 030 100 078 082 0891198731015840119903120575120575 019 017 008 058 021 029 009 006 005 030 100 083 0911198731015840119903119903120575 029 032 015 016 072 044 009 018 049 062 050 100 0731198731015840119903V120575 032 011 033 090 001 009 026 032 016 049 073 024 100
Table 4 Comparison of correlation coefficients using additionalsignal
1198731 119873101584011198731015840V 0465 00811198731015840119903 0996 00111198731015840|V|V 0450 00261198731015840|V|119903 0849 00021198731015840120575 0552 00281198731015840120575120575120575 0556 00221198731015840V120575120575 0491 00051198731015840VV120575 0455 00291198731015840|119903|119903 0023 08341198731015840V|119903| 0970 00391198731015840119903120575120575 0665 00151198731015840119903119903120575 0912 00131198731015840119903V120575 0771 0024
might cause the parameter drift as described in the Sec-tion 31 are changed and the parameter drift can be alleviatedresultantly From the point of view of regression analysis theintroduction of the additional signal alters the input variableswhich might alleviate the degree of linear dependencebetween the changed variables and others Takingmodel (27)as an example assuming 120582 = 1 Table 4 lists the correlationcoefficients before and after the additional signal is attachedto the samples in which 1198731 = 11987310158401 = 1 indicates that coeffi-cient of the first input variable [Δ119903(119896)+119910119886(119896)] in (27) is one Ascan be seen from the comparison results the degree of lineardependence remarkably decreases for most of variables afteran additional signal is added
It is noted that the design of additional signal dependson the characteristic of the data samples or the manoeuvringmotion For periodically nonlinear motion such as zigzagmanoeuvre or turning circle manoeuvring the linear rampsignal like (26) works well [23] for a linear motion such asoblique towing test a nonlinear additional signal is moreappropriate [54]
Table 5 Hydrodynamic coefficients of KVLCC2 (times10minus5)Value X-coef Value Y-coef Value N-coef Value
1198831015840 minus954 1198831015840119906 minus93 1198841015840V minus358 1198731015840V minus631198841015840V minus1283 1198831015840VV 149 1198841015840119903 1980 1198731015840119903 minus741198841015840119903 0 1198831015840119903119903 minus108 1198841015840120575 448 1198731015840120575 minus1651198731015840V 0 1198831015840120575120575 minus105 1198841015840|V|V minus35 1198731015840|V|V 201198731015840119903 minus107 1198831015840V119903 minus237 1198841015840|V|119903 30 1198731015840|V|119903 minus991199091015840119866 3486 1198831015840V120575 172 1198841015840|119903|119903 679 1198731015840|119903|119903 minus171198981015840 1908 1198831015840119903120575 minus433 1198841015840V|119903| 158 1198731015840V|119903| minus431198681015840119911 119 11988310158400 minus48 1198841015840120575120575120575 minus94 1198731015840120575120575120575 22
1198841015840V120575120575 minus36 1198731015840V120575120575 171198841015840VV120575 minus73 1198731015840VV120575 121198841015840119903120575120575 minus23 1198731015840119903120575120575 221198841015840119903119903120575 134 1198731015840119903119903120575 minus401198841015840119903V120575 minus28 1198731015840119903V120575 3911988410158400 minus66 11987310158400 02
4 Example Study
The abovementioned measures on how to diminish the driftof hydrodynamic coefficients including difference methodand additional signal are employed in identifying a simplifiedAbkowitz model combined with free-running model tests ofaKVLCC2 SVMbased SI is used to obtain the hydrodynamiccoefficients The details of the mathematical model of shipmanoeuvring the SVM methodology the ship and themodel tests can be found in [24] and relevant literatureTable 5 lists the identification results of the hydrodynamiccoefficients in which the addedmasses and addedmoment ofinertia are calculated by slender-body theory as stated in Sec-tion 2 Based on the regression model 25∘5∘ zigzag manoeu-vring motion is simulated and the predicted results arecomparedwith the experimental results as shown in Figure 2Comparisons with the experimental results of other twomanoeuvres are presented in Figure 3 (20∘5∘ zigzagmanoeu-vre) and Figure 4 (20∘10∘ zigzag manoeuvre) respectivelyAs can be seen good agreement between prediction and
8 Mathematical Problems in Engineering
PredictionsExperiments
20 40 60 80 100 1200
20 40 60 80 100 1200
20 40 60 80 100 1200
20 40 60 80 100 1200Time (s)
minus500
50
051
15
u(m
s)
minus050
05
(m
s)
r(∘
s)
minus505
Heading (∘) and rudder angle (∘)
Figure 2 Prediction of 25∘5∘ zigzag manoeuvre of a KCLCC2 ship
PredictionsExperiments
05
1
15
u(m
s)
20 40 60 80 100 120 140 1600minus05
0
05
(m
s)
r(∘
s)
minus5
05
minus50
050
Heading (∘) and rudder angle (∘s)
20 40 60 80 100 120 140 1600
20 40 60 80 100 120 140 1600
20 40 60 80 100 120 140 1600Time (s)
Figure 3 Prediction of 20∘5∘ zigzag manoeuvre of a KCLCC2 ship
experiment is achieved It is owing not only to the use of SVMmethod a powerful modeling tool but also to the measurestaken to diminish the parameter drift
5 Conclusions
Parameter identifiability is an important issue for the SI appli-cation to the modeling of ship manoeuvring Some parame-ters in the manoeuvring model cannot be obtained using SIwhile some parameters deviate from true values even if theycan be derived Several measures are proposed to deal withthe problem of parameter identifiability and the validitiesare demonstrated by examples To determine the addedmasses and added moment of inertia slender-body theoryprovides a simple estimationmethod Todiminish the param-eter drift effect the mathematical model of ship manoeu-vring motion is simplified on the basis of regression analysis
PredictionsExperiments
r(∘
s)
Heading (∘) and rudder angle (∘s)
minus50
050
05
1
15
u(m
s)
minus05
0
05
(m
s)
minus5
05
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800Time (s)
Figure 4 Prediction of 20∘10∘ zigzagmanoeuvre of aKCLCC2 ship
difference of the samples and additional signal also take effectThese measures can be viewed as developed approaches thatare commonly used in regression analysis to diminish themulticollinearity For instance the simplification of a modelcan be viewed as a kind of pruning-variable method or PCRanalysis since the main components in the model remainedwhile some trivial variables are removed The additionalsignal method can be viewed as the opposition to pruning-variable method
Future work will be devoted to the study on a more accu-rate practical and universal estimation method for addedmasses and added moment of inertia since slender-bodymethod gives satisfactory results only for slender ships andldquomildrdquo manoeuvres Moreover how to design an appropriateadditional signal according to the characteristics of sampleswill be studied
Competing Interests
The author declares that they have no competing interests
Acknowledgments
This work was partially supported by the Special Item forUniversity in Fujian Province supported by the EducationDepartment (no JK15003) and the Special Item supportedby the Fujian Provincial Department of Ocean and Fisheries(no MHGX-16) The author is grateful to the Hamburg ShipModel Basin (HSVA) for providing the experimental data
References
[1] International Maritime Organization (IMO) ldquoStandards forship manoeuvrabilityrdquo Resolution MSC 137(76) 2002
Mathematical Problems in Engineering 9
[2] The Maneuvering Committee of ITTC ldquoFinal report andrecommendations to the 25th ITTCrdquo in Proceedings of the 25thInternational Towing Tank Conference pp 143ndash208 FukuokaJapan 2008
[3] G Rajesh and S K Bhattacharyya ldquoSystem identification fornonlinear maneuvering of large tankers using artificial neuralnetworkrdquo Applied Ocean Research vol 30 no 4 pp 256ndash2632008
[4] L Moreira and C Guedes Soares ldquoRecursive neural networkmodel of catamaran manoeuvringrdquo International Journal ofMaritime Engineering vol 154 pp A121ndashA130 2012
[5] W L Luo and Z J Zou ldquoBlind prediction of ship manoeuvringby using Support Vector Machinesrdquo in Proceedings of the the29th International Conference on Offshore Mechanics and ArcticEngineering (OMAE rsquo10) Shanghai China June 2010
[6] W Luo L Moreira and C Guedes Soares ldquoManoeuvringsimulation of catamaran by using implicit models based onsupport vector machinesrdquo Ocean Engineering vol 82 pp 150ndash159 2014
[7] T Holzhuter ldquoRobust identification in an adaptive track con-troller for shipsrdquo in Proceedings of the 3rd IFAC Symposium onAdaptive Systems in Control and Signal Processing pp 275ndash280Glasgow UK 1989
[8] R Munoz-Mansilla J Aranda J M Dıaz and J de la CruzldquoParametricmodel identification of high-speed craft dynamicsrdquoOcean Engineering vol 36 no 12-13 pp 1025ndash1038 2009
[9] M N Hayes Parameters identification of nonlinear stochasticsystems applied to ocean vehicle dynamics [PhD thesis] Mas-sachusetts Institute of Technology CambridgeMassUSA 1971
[10] J Van Amerongen ldquoAdaptive steering of ships-a model refer-ence approachrdquo Automatica vol 20 no 1 pp 3ndash14 1984
[11] M A Abkowitz ldquoMeasurement of hydrodynamic characteristicfrom shipmaneuvering trials by system identificationrdquoTransac-tions of Society of Naval Architects andMarine Engineers vol 88pp 283ndash318 1981
[12] L P Perera P Oliveira and C Guedes Soares ldquoSystemidentification of nonlinear vessel steeringrdquo Journal of OffshoreMechanics and Arctic Engineering vol 137 no 3 Article ID031302 pp 1ndash7 2015
[13] K J Astrom ldquoMaximum likelihood and prediction errormethodsrdquo Automatica vol 16 no 5 pp 551ndash574 1980
[14] C G Kallstrom and K J Astrom ldquoExperiences of systemidentification applied to ship steeringrdquo Automatica vol 17 no1 pp 187ndash198 1981
[15] W-W Zhou and M Blanke ldquoIdentification of a class ofnonlinear state-space models using RPE techniquesrdquo IEEETransactions on Automatic Control vol 34 no 3 pp 312ndash3161989
[16] E Revestido Herrero and F J Velasco Gonzalez ldquoTwo-stepidentification of non-linear manoeuvring models of marinevesselsrdquo Ocean Engineering vol 53 pp 72ndash82 2012
[17] R P Selvam S K Bhattacharyya andMHaddara ldquoA frequencydomain system identificationmethod for linear shipmaneuver-ingrdquo International Shipbuilding Progress vol 52 no 1 pp 5ndash272005
[18] S K Bhattacharyya andM R Haddara ldquoParametric identifica-tion for nonlinear ship maneuveringrdquo Journal of Ship Researchvol 50 no 3 pp 197ndash207 2006
[19] Y Chen Y Song and M Chen ldquoParameters identificationfor ship motion model based on particle swarm optimizationrdquoKybernetes vol 39 no 6 pp 871ndash880 2010
[20] Y T Dai L Q Liu and S S Feng ldquoOn the identification of cou-pled pitch and heave motions using opposition-based particleswarm optimizationrdquo Mathematical Problems in Engineeringvol 2014 Article ID 784049 10 pages 2014
[21] K-P Rhee S-Y Lee and Y-J Sung ldquoEstimation of manoeu-vring coefficients from PMM test by genetic algorithmrdquo inProceedings of the International Symposium and Workshop onForce Acting on aManoeuvringVessel Val de Reuil France 1998
[22] S Sutulo and C Guedes Soares ldquoAn algorithm for offlineidentification of ship manoeuvring mathematical models fromfree-running testsrdquo Ocean Engineering vol 79 pp 10ndash25 2014
[23] W L Luo and Z J Zou ldquoParametric identification of shipmaneuvering models by using support vector machinesrdquo Jour-nal of Ship Research vol 53 no 1 pp 19ndash30 2009
[24] W L Luo C Guedes Soares and Z J Zou ldquoParameteridentification of ship maneuvering model based on supportvector machines and particle swarm optimizationrdquo Journalof Offshore Mechanics and Arctic Engineering vol 138 no 3Article ID 031101 8 pages 2016
[25] W Y Hwang ldquoCancellation effect and parameter identifiabilityof ship steering dynamicsrdquo International Shipbuilding Progressvol 29 no 332 pp 90ndash120 1982
[26] C G Kallstrom ldquoIdentification and adaptive control applied toship steeringrdquo Tech Rep SSPAPUB-93 1982
[27] H D Nguyen ldquoRecursive identification of ship maneuveringdynamics and hydrodynamicsrdquo in Proceedings of the 36thEMAC Annual Conference pp C717ndashC732 Reykjavik Iceland2007
[28] F J Velasco I Zamanillo E Lopez and E Moyano ldquoParameterestimation of ship linear maneuvering modelsrdquo in Proceedingsof the OCEANS 2011 IEEE Santander Conference pp 1ndash8Santander Spain June 2011
[29] M R Haddara and Y Wang ldquoParametric identification ofmanoeuvring models for shipsrdquo International ShipbuildingProgress vol 46 no 445 pp 5ndash27 1999
[30] D Hess W Faller J Lee T Fu and E Ammeen ldquoShip maneu-vering simulation in wind and waves a nonlinear time-domainapproach using recursive neural networksrdquo in Proceedings of the26th Symposium on Naval Hydrodynamics Rome Italy 2006
[31] D Hess W Faller and J Lee ldquoReal-time nonlinear simulationof maneuvers for US navy combatant DTMB 5415rdquo in Pro-ceedings of the Workshop on Verification and Validation of ShipManeuvering Simulation Methods (SIMMAN rsquo08) pp E15ndashE21Copenhagen Denmark 2008
[32] M A Abkowitz ldquoLectures on ship hydrodynamicsmdashsteeringand manoeuvrabilityrdquo Tech Rep Hy-5 Hydro- and Aerody-namics Laboratory Lyngby Denmark 1964
[33] A Ogawa and H Kasai ldquoOn the mathematical model ofmanoeuvring motion of shipsrdquo International ShipbuildingProgress vol 25 no 292 pp 306ndash319 1978
[34] K Nomoto T Tagushi K Honda and S Hirano ldquoOn steeringqualities of shipsrdquo International Shipbuilding Progress vol 4 no35 pp 354ndash370 1957
[35] S Toxopeus ldquoValidation of slender-bodymethod for predictionof linear manoeuvring coefficients using experiments andviscous-flow calculationsrdquo in Proceedings of the 7th ICHDInternational Conference on Hydrodynamics (ICHD rsquo06) pp589ndash598 University of Naples ldquoFederico IIrdquo October 2006
[36] T-I Lee K-S Ahn H-S Lee and D-K Yum ldquoOn anempirical prediction of hydrodynamic coefficients for modernship hullsrdquo in Proceedings of the International Conference on
10 Mathematical Problems in Engineering
Marine Simulation and Ship Manoeuvrability (MARSIM rsquo03)Kanazawa Japan August 2003
[37] HNorrbinNils ldquoTheory and observations on the use of amath-ematical model for ship manoeuvring in deep and confinedwatersrdquo Report No SSPA-Pub-68 Swedish State ShipbuildingExperimental Tank Goteborg 1971
[38] R-C ZhuH-QGuo G-PMiao and J-W Yu ldquoComputationalmethod for evaluation of addedmass anddamping of ship basedon CFD theoryrdquo Journal of Shanghai Jiaotong University vol 43no 2 pp 198ndash203 2009
[39] J N NewmanMarine Hydrodynamics MIT Press CambridgeMass USA 1977
[40] M S Chislett and J Strom-Tejsen ldquoPlanar motion mechanismtests and full-scale steering and maneuvering predictions for aMariner class vesselrdquo International Shipbuilding Progress vol 12pp 201ndash224 1965
[41] M Z Fabrycy ldquoMulticollinearity caused by specificationerrorsrdquo Applied Statistics vol 24 no 2 pp 250ndash254 1975
[42] W L LuoOn themodeling of shipmanoeuvring by using supportvector machines [PhD thesis] Shanghai Jiao Tong UniversityShanghai China 2009
[43] S S Bowles and H M Levin ldquoMore on multicollinearity andthe effectiveness of schoolsrdquo The Journal of Human Resourcesvol 3 no 3 pp 393ndash400 1968
[44] I Jolliffe Principal Component Analysis John Wiley amp Sons2002
[45] SWold A Ruhe HWold andW J Dunn III ldquoThe collinearityproblem in linear regression The Partial Least Squares (PLS)approach to generalized inversesrdquo SIAM Journal on Scientificand Statistical Computing vol 5 no 3 pp 735ndash743 1984
[46] A G Ivakhnenko and J A Muller ldquoPresent state and newproblems of further GMDH developmentrdquo Systems AnalysisModeling Simulation vol 20 pp 3ndash16 1995
[47] H K Yoon and K P Rhee ldquoIdentification of hydrodynamiccoefficients in ship maneuvering equations of motion byEstimation-Before-Modeling techniquerdquo Ocean Engineeringvol 30 no 18 pp 2379ndash2404 2003
[48] S M Yeon D J Yeo and K P Rhee ldquoOptimal input designfor the identification of low-speed manoeuvring mathemati-cal modelrdquo in Proceedings of the International Conference onMarine Simulation and Ship Manoeuvrability (MARSIM rsquo06)Terschelling The Netherlands June 2006
[49] W Y HwangApplication of system identification to ship maneu-vering [PhD thesis] Massachusetts Institute of TechnologyCambridge Mass USA 1980
[50] K P Rhee and K Kim ldquoA new sea trial method for estimatinghydrodynamic derivativesrdquo Ship Ocean Technology vol 3 no 3pp 25ndash44 1999
[51] M Viviani R Depascale L Sebastiani C Podenzana Bon-vino R Dattola and M Soave ldquoAlternative methods forthe identification of hydrodynamic derivatives from standardmanoeuvresrdquo in Proceedings of the International Conference onMarine Simulation and Ship Manoeuvrability (MARSIM rsquo03)Kanazawa Japan August 2003
[52] W-L Luo and Z-J Zou ldquoElimination of simultaneous driftand sensitivity analysis in the hydrodynamic modeling of shipmanoeuvringrdquo Journal of Shanghai Jiaotong University vol 42no 8 pp 1358ndash1362 2008
[53] R R Shenoi P Krishnankutty and R P Selvam ldquoSensitivitystudy of hydrodynamic derivative variations on the maneu-verability prediction of a container shiprdquo in Proceedings of the
ASME 34th International Conference on Ocean Offshore andArctic Engineering (OMAE rsquo15) American Society ofMechanicalEngineers June 2015
[54] W L Luo and Z J Zou ldquoAnalysis of captive model obliquetowing test by using least squares support vector machinesrdquoShipbuilding of China vol 51 no 2 pp 10ndash14 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
Like the other means to come to manoeuvring predic-tions SI has its own advantages and disadvantages whenapplied to ship manoeuvring modeling The main disadvan-tage is the problem of parameter identifiability It can beexplained from two aspects One kind of parameter identi-fiability is whether the parameters can be identified or notWhen solving a state space equation with respect to the shipmanoeuvring motion some parameters cannot be identifiedfor instance the added masses or acceleration derivatives nomatterwhat input-output samples are provided andnomatterwhich SI technique is adopted The other kind of parameteridentifiability is the effect of parameter drift The identifiedcoefficients might be not physically correct but be mathe-matically correct [2] which implies that even if the identifiedparameters deviate from their true values the manoeuvringmodel can predict the manoeuvring motion well comparedwith the test results However this prediction ability is usuallyrestricted to the prediction of the manoeuvre which providesthe data samples for system identification For example amanoeuvring model for a ship based on the identification of10∘10∘ zigzag manoeuvre can predict the same manoeuvrewell (ie 10∘10∘ zigzag manoeuvre) but fails when predictingother manoeuvres for instance 20∘20∘ zigzag manoeuvreor turning circle manoeuvres The effect of parameter drifthappens more frequently and severely for a complicated shipmanoeuvring model in which a number of hydrodynamiccoefficients are contained for instance the Abkowitz model
SI application to the modeling of ship manoeuvring hadever been widely studied in the 1980s with the developmentof SI techniques for instance the applications of EKFML andRPE Correspondingly the issues on parameter identifiabilitywere addressed and some measures had been proposed [1125 26] In the 1990s studies on the application of SI to the shipmanoeuvring had been paid relatively less attention to due toa new charming method (well known as the CFD method)and the limitations of test technology and SI techniques avail-able including the system observability the sensitivity to theinitial estimation of parameters andnoises and the parameteridentifiability especially the effect of parameter drift Withthe development ofmodernmeasurement equipment and theintroduction of advanced SI techniques SI based modelingof ship manoeuvring received renewed attention during thepast decade On one hand some classical SI techniques havebeen continuously applied and developed for instance theLS method [8] the EKF method [12] the RPE method [16]and some hybridmethods [27 28] On the other hand severalnovel and interesting SI methods have been proposed Rep-resentative examples are the artificial intelligence techniquesincluding PSO [19 20] GA [21 22] SVM [23 24] and ANN[29ndash31] However it should be noted thatmuchwork (includ-ing the work on classical SI or the work on new SI) concernedlittle about the problem of parameter identifiability especiallyfor the effect of parameter drift or avoided dealing withthe problem by selecting a simple manoeuvring model (egthe Nomoto model or the response model) in which theparameter drift is weak because few parameters are involved
In this paper some issues on the parameter identifiabilityare summarized Furthermore several measures to deal withthe identifiability problem are presented especially for the
diminishment of the parameter drift in the identificationof a complicated ship manoeuvring model the Abkowitzmodel Combined with free-runningmodel test results SVMbased system identification is employed to obtain the hydro-dynamic coefficients Based on the identified manoeuvringmodel manoeuvring simulation is conducted and predictionresults are comparedwith the test results which demonstratesthe validity of the proposed methods
2 Determination of Added Masses andAdded Moment of Inertia
Three kinds of models are available for the prediction of shipmanoeuvring including the Abkowitz model [32] the MMGmodel [33] and the response model [34] Comparativelythe first two models are frequently used because they give amore comprehensive understanding of the shipmanoeuvringmotion On the other hand a number of hydrodynamiccoefficients are contained in themodels whichmakes it chal-lenging to determine these coefficients accurately From thepoint of view of system identification one of the difficulties isthat not all coefficients can be identified
Taking a linear manoeuvring model as an example thestate space equation can be written as
[[[
119898 minus 119883 0 00 119898 minus 119884V 119898119909119866 minus 119884 1199030 119898119909119866 minus 119873V 119868119911119911 minus 119873 119903
]]]
[[[
V
119903]]]
= [[[
119883119906 0 00 119884V 119884119903 minus 11989811990600 119873V 119873119903 minus 1198981199091198661199060
]]]
[[[
119906V
119903]]]
+ [[[
0119884120575119873120575
]]]
120575(1)
where 119906 is the surge speed V is the sway speed 119903 is the yawrate 120575 is the rudder angle 119898 is the mass of the ship 119868119911119911 isthe moment of inertia of the ship 119909119866 longitudinal coordinateof the shiprsquos center of gravity 1199060 is the service speed of theship119883 et al are the hydrodynamic derivatives amongwhichthe acceleration derivatives minus119883 minus119884V minus119884 119903 minus119873V are named asthe added masses and minus119873 119903 is the added moment of inertiaDenote
119883 = [[[
119906V
119903]]]
119875 = [[[
119898 minus 119883 0 00 119898 minus 119884V 119898119909119866 minus 119884 1199030 119898119909119866 minus 119873V 119868119911119911 minus 119873 119903
]]]
119860 = [[[
119883119906 0 00 119884V 119884119903 minus 11989811990600 119873V 119873119903 minus 1198981199091198661199060
]]]
119861 = [[[
0119884120575119873120575
]]]
(2)
Mathematical Problems in Engineering 3
Table 1 Added masses and added moment of inertia (times10minus5)Coefficient Slender-body theory Captive model test1198831015840 minus399 minus421198841015840V minus728 minus7481198841015840119903 0 minus93541198731015840V 0 46461198731015840119903 minus607 minus438
Equation (1) can be written as
= 119875minus1119860119883 + 119875minus1119861120575 (3)
if 119875 is invertibleUsing SI two matrix combinations in (3) that is 119875minus1119860
and 119875minus1119861 can be determined however the three coefficientmatrices 119875 119860 and 119861 cannot be obtained separately Onesolution is to determine one coefficientmatrix first in anotherway for example the slender-body theory empirical formulacaptive model test or CFD calculation Usually but notalways the mass matrix 119875 is selected to be predeterminedin that the abovementioned methods have been successfullyapplied to determine the added masses and added momentof inertia for example [35ndash38] Among these methods theslender-body theory provides a simple but effective wayTable 1 lists the comparison results of nondimensional addedmasses and addedmoment of inertia between the calculationbased on slender-body theory [39] and captivemodel tests foraMariner ship [40] It is assumed that the ship is symmetricalabout 119910119911 plane in calculation as such 1198841015840119903 = 1198731015840V = 0
As can be seen from the comparison results the slender-body theory gives a satisfactory estimation of three importanthydrodynamic derivatives 1198831015840 1198841015840V and 1198731015840119903 Combined withfree-running model tests SVM based SI was used to identifythe hydrodynamic derivatives in an Abkowitz model exceptfor the added masses and added moment of inertia that wereobtained by slender-body method [24]
3 Parameter Drift andDiminishment Measures
Another kind of parameter identifiability referred to asthe parameter drift or simultaneous drift of parameters ismore difficult to deal with especially for the identificationof a complicated manoeuvring model such as an Abkowitzmodel or a nonlinearMMGmodel As aforementioned whenparameter drift happens the identified parameters might bemathematically correct but physically incorrect Even worsethe ldquomathematically correctrdquo parameters cannot be obtained
The reason for the drift of hydrodynamic coefficientshas not been made fully clear physically Hwang applied theslender-body theory to explain the mechanism of the drift oflinear hydrodynamic coefficients which is due to the dynamiccancellation [25] However for the drift of nonlinear hydro-dynamic coefficients it can only be explained from the pointof view of regression analysis not physically but statisticallyThe drift of nonlinear hydrodynamic coefficients is due tothe so-called multicollinearity [23] In fact many nonlinear
hydrodynamic coefficients in themathematical model of shipmanoeuvring motion have no clear physical meaning
31 Simultaneous Drift of Linear Hydrodynamic CoefficientsBrief explanation of the simultaneous drift of linear hydro-dynamic coefficients is given as follows More details can befound in [11 25]
For a slender ship moving on the horizontal plane theviscous sway force and yawmoment can be calculated as [39]
119884 = minus1212058812058711988921199060 (V + 1
2119871119903) 119873 = minus1
412058812058711988921198711199060 (V + 12119871119903)
(4)
where 120588 is the fluid density 119889 is the draft of the ship 1199060 is theservice speed of the ship assuming 119906 asymp 1199060 and 119871 the lengthof ship The above two expressions can be rewritten as
119884 = 119884VV + 119884119903119903119873 = 119873VV + 119873119903119903 (5)
in terms of hydrodynamic derivatives and motion variablesIt can be inferred that
119884V119884119903 = 119873V119873119903 = 2119871 (6)
During a ship manoeuvre the pivot of the ship is near to thebow therefore it follows that
V + 12119871119903 asymp 0 (7)
which indicates that
119884VV + 119884119903119903 asymp 0 (8)
119873VV + 119873119903119903 asymp 0 (9)
Combinedwith (6) it can be inferred that two pairs of param-eters that is 119884V and 119884119903 119873V and 119873119903 are allowed to becomelarger or smaller simultaneously Figure 1 presents the simu-lation results of nondimensional linear components of swayforce and yawmoment for the 10∘10∘ zigzag manoeuvre of aMariner vessel [40] As can be seen the sway force andyaw moment are small at the helming stage when rudderangle switches At the steady stage when rudder angle keepsunchanged the following approximations hold
1198841015840VV1015840 + 11988410158401199031199031015840 asymp 1198961119884101584012057512057510158401198731015840VV1015840 + 11987310158401199031199031015840 asymp 119896211987310158401205751205751015840
V1015840 asymp 119896312057510158401199031015840 asymp 11989641205751015840
(10)
where 1198961sim4 are constants Based on the above approximationstwo linear expressions can be obtained as
11989631198841015840V + 11989641198841015840119903 asymp 1198961119884101584012057511989631198731015840V + 11989641198731015840119903 asymp 11989621198731015840120575
(11)
4 Mathematical Problems in Engineering
Nondimensional linear Y-force componentstimes10minus3
100 200 300 400 500 6000t (sec)
minus15
minus1
minus05
0
05
1
15
Nondimensional linear N-moment components
N998400
998400+ N
998400
rr998400
N998400
120575120575998400
N998400
998400
N998400
rr998400
times10minus4
100 200 300 400 500 6000t (sec)
minus4
minus2
0
2
4
Y998400
998400+ Y
998400
rr998400
Y998400
120575120575998400
Y998400
998400
Y998400
rr998400
Figure 1 Nondimensional linear components of sway force and yawmoment for 10∘10∘ zigzag manoeuvre of aMariner vessel
which means that the elements within the parameter set1198841015840V 1198841015840119903 1198841015840120575 or 1198731015840V 1198731015840119903 1198731015840120575 possibly drift simultaneously
32 Drift of Nonlinear Hydrodynamic Coefficients From thepoint of view of regression analysis the drift of hydrodynamiccoefficients linear andor nonlinear results from the so-called multicollinearity It can be explained that if the inputvariables of a mathematical model are strongly linearlydependent on each other their corresponding coefficients inthe regressionmodelmight be incorrect even if the predictedresults based on the regression model do agree well withthe desired The case is more possible and serious especiallywhen the system contains a large number of parameters to beidentified Equations (8) and (9) present simple examples oflinear dependence It can be inferred that V and 119903 are linearlydependent on each other This implies that there existsmulticollinearity in themodel which results in the parameterdrift of 119884V and 119884119903 for (8) and 119873V and 119873119903 for (9)
It is noted that multicollinearity is a commonplace in theregression analysis [41] not a special effect that happens inthe system identification of shipmanoeuvringMoreover thisphenomenon cannot be eliminated but only moderated ordiminished because the input variables are always linearlydependent on each other more or less
It is important to assess the degree of multicollinearity ina system before diminishment measures are taken Commonused assessment tools include 119865- and 119905-tests Variance Infla-tion Factor (VIF) or tolerance (reciprocal ofVIF) eigenanaly-sis determination coefficient and correlation coefficientThe
last method provides a simple and effective way Using thismethod a correlation coefficient between two variables 1199091and 1199092 can be defined as
12058811990911199092
= cov (1199091 1199092)radic119863 (1199091)119863 (1199092)
(12)
where 119863(1199091) and 119863(1199092) denote the variance and cov (1199091 1199092)denotes the covariance Usually the nearer to one the absolutevalue of 120588119909
11199092
approximates the more serious the lineardependence between 1199091 and 1199092 is An example is given withrespect to a nonlinear ship manoeuvring model in which thenondimensional yaw-equation can be described as
(11989810158401199091015840119866 minus 1198731015840V) ΔV1015840 + (1198681015840119911119911 minus 1198731015840119903) Δ 1199031015840= Δ11989110158403 (Δ1199061015840 ΔV1015840 Δ1199031015840 Δ1205751015840) (13)
where Δ1199061015840 ΔV1015840 Δ1199031015840 and Δ1205751015840 are small perturbations fromnominal values of surge speed sway speed yaw rate andrudder angle respectivelyThe nonlinear functionΔ11989110158403 on theright-hand side of (13) can be expressed as [42]
Δ11989110158403 = 1198731015840VΔV1015840 + 1198731015840119903Δ1199031015840 + 1198731015840120575Δ1205751015840 + 1198731015840|V|V 10038161003816100381610038161003816ΔV101584010038161003816100381610038161003816 ΔV1015840+ 1198731015840|V|119903 10038161003816100381610038161003816ΔV101584010038161003816100381610038161003816 Δ1199031015840 + 1198731015840|119903|119903 10038161003816100381610038161003816Δ119903101584010038161003816100381610038161003816 Δ1199031015840+ 1198731015840V|119903|ΔV1015840 10038161003816100381610038161003816Δ119903101584010038161003816100381610038161003816 + 1198731015840120575120575120575Δ12057510158403 + 1198731015840VV120575ΔV10158402Δ1205751015840+ 1198731015840VV120575ΔV1015840Δ12057510158402 + 1198731015840119903120575120575Δ1199031015840Δ12057510158402 + 1198731015840119903119903120575Δ11990310158402Δ1205751015840+ 1198731015840119903V120575Δ1199031015840ΔV1015840Δ1205751015840 + 11987310158400
(14)
Combined with the test data of 25∘5∘ zigzag manoeuvre ofa KVLCC2 ship which was conducted in the Hamburg ShipModel Basin (HSVA) the correlation coefficients of variablesin (14) can be calculated as listed in Table 2 As can be seenthe degree of linear dependence is heavy for some variablesfor instance ΔV1015840 and ΔV1015840Δ12057510158402 with the correlation coefficient099 A heavymulticollinearitymight exist with respect to thesystem (14) which results in the parameter drift not only forthe linear parameters but also the nonlinear parameters
33 Measures to Diminish the Drift of Hydrodynamic Coeffi-cients From the above discussion it can be concluded thatmulticollinearity is the main reason for the drift of hydrody-namic coefficients especially for the nonlinear onesThereforethe alleviation of multicollinearity is vital for the diminish-ment of parameter drift
Several remedies are available to moderate the degree ofmulticollinearity for instance difference method pruning-variable method [43] principal component regression (PCR)analysis [44] partial least squares (PLS) [45] and a groupmethod of data handling (GMDH) [46] Some of them weredeveloped to diminish the drift of hydrodynamic coefficientsFor example Hwang proposed parallel processing exagger-ated over- and underestimation parameter transformation tomoderate the drift of linear hydrodynamic coefficients [25]
Mathematical Problems in Engineering 5
Table 2 Matrix of correlation coefficients
1198731015840V 1198731015840119903 1198731015840|V|V 1198731015840|V|119903 1198731015840120575 1198731015840120575120575120575 1198731015840V120575120575 1198731015840VV120575 1198731015840|119903|119903 1198731015840V|119903| 1198731015840119903120575120575 1198731015840119903119903120575 1198731015840119903V1205751198731015840V 100 045 098 067 091 092 099 097 039 084 054 054 0681198731015840119903 100 042 084 053 054 047 043 097 066 091 075 0811198731015840|V|V 100 066 083 085 098 100 032 077 050 042 0671198731015840|V|119903 100 062 064 068 066 075 087 092 073 1001198731015840120575 100 099 091 083 050 083 061 071 0621198731015840120575120575120575 100 092 085 050 083 062 069 0641198731015840V120575120575 100 098 040 083 055 053 0691198731015840VV120575 100 033 077 050 042 0671198731015840|119903|119903 100 062 086 081 0721198731015840V|119903| 100 078 082 0891198731015840119903120575120575 100 083 0911198731015840119903119903120575 100 0731198731015840119903V120575 100
For nonlinear hydrodynamic coefficients ridge regressionand modification of input scenario were proposed [47 48]However for given samples from real manoeuvring testssuch a modification of excitation might be not applicable inother words this approach might only work for simulationdata
Since the multicollinearity is an inherent characteristicof a regression model besides the regression tool (eg LSand EKF) modification of the model is a direct and effectiveway to alleviate the multicollinearity which can be achievedby altering the structure of the model and reconstructing theinput variables in the model with the aim to decrease thelinear dependence of variables Based on these ideas threeapproaches are presented to diminish the drift of hydrody-namic coefficients including simplification of the manoeu-vring model difference of the samples and the method ofadditional signal Studies are performed mainly combinedwith the Abkowitz model
331 Simplification of the Manoeuvring Model Although theAbkowitz model is often preferred in the prediction of shipmanoeuvring such a ldquolargerdquo parametric system makes itinconvenient to use in practice Actually some nonlinearderivatives are difficult to be determined although they couldbe unimportant In practical application of the Abkowitzmodel simplification had been performed to improve thefeasibility of this model Examples are the work by Abkowitz[11] and Norrbin Nils [37] Physical meanings were the mainconcern in the simplification The simplification can also beperformed from the point of view of regression analysis [24]Taking the yaw-equation (13) as an example the originalexpression of (14) is
Δ11989110158403 = 11987310158400119906Δ1199061015840 + 11987310158400119906119906Δ11990610158402 + 1198731015840VΔV1015840 + 1198731015840119903Δ1199031015840+ 1198731015840120575Δ1205751015840 + 1198731015840VVVΔV10158403 + 1198731015840120575120575120575Δ12057510158403+ 1198731015840VV119903ΔV10158402Δ1199031015840 + 1198731015840VV120575ΔV10158402Δ1205751015840 + 1198731015840V120575120575ΔV1015840Δ12057510158402
+ 1198731015840120575119906Δ1205751015840Δ1199061015840 + 1198731015840V119906ΔV1015840Δ1199061015840 + 1198731015840119903119906Δ1199031015840Δ1199061015840+ 1198731015840120575119906119906Δ1205751015840Δ11990610158402 + 1198731015840119903119903119903Δ11990310158403 + 1198731015840V119903119903ΔV1015840Δ11990310158402+ 1198731015840V119906119906ΔV1015840Δ11990610158402 + 1198731015840119903119906119906Δ1199031015840Δ11990610158402 + 1198731015840119903120575120575Δ1199031015840Δ12057510158402+ 1198731015840119903119903120575Δ11990310158402Δ1205751015840 + 1198731015840119903V120575Δ1199031015840ΔV1015840Δ1205751015840 + 11987310158400
(15)
in which 22 hydrodynamic coefficients are contained [40]To simplify it all the nonlinear terms related to the surgeperturbation Δ1199061015840 are eliminated for two reasons First sincethe ship total velocity 119880(119905) is taken as the nondimensionalfactor the effect of velocity loss has been taken into account inevery velocity term Second the linear dependence betweenthe linear and nonlinear terms relating to Δ1199061015840 is significantwhichwill result in the parameter drift For example the thirdand twelfth terms on the right hand side of (15) at the 119896thsampling time can be written as
1198731015840VΔV (119896) 119880 (119896) + 1198731015840V119906ΔV (119896) Δ119906 (119896) (16)
by considering the prime nondimensional definition
Δ1199061015840 = Δ119906119880
Δ1015840 = Δ(1198802119871)
(17)
For moderate manoeuvres it holds that
119880 (119896) asymp 1199060 + Δ119906 (119896) (18)
The expression (16) can be written as
1198731015840VΔV (119896) 1199060 + 1198731015840VΔV (119896) Δ119906 (119896) + 1198731015840V119906ΔV (119896) Δ119906 (119896) (19)
Obviously the second term is linearly dependent on thethird term In consideration of the significance of the linearderivative1198731015840V the nonlinear term1198731015840V119906ΔV(119896)Δ119906(119896) is removed
6 Mathematical Problems in Engineering
In the same way the other six terms related to the derivatives11987310158400119906119906 1198731015840120575119906 1198731015840119903119906 1198731015840120575119906119906 1198731015840V119906119906 and 1198731015840119903119906119906 can be removed from(15) Ignoring the effect of surge speed 119906 on the change of yawmoment 11987310158400119906Δ1199061015840 can be removed furthermore Finally byintroducing the cross flow models to replace the third-ordernonlinear terms model (15) is simplified to model (14) withthe number of hydrodynamic coefficients decreasing from 22to 14
Sensitivity analysis provides another way to simplify themathematical model of ship manoeuvring [49ndash53] Usingthis method the effect of the hydrodynamic coefficient onthe prediction of ship manoeuvring is studied by observingthe change of manoeuvring (eg velocity angular velocityadvance transfer overshoots and tactical diameter) to thechange of hydrodynamic coefficients Based on the results ofsensitivity analysis some trivial hydrodynamic coefficientsare removed from the mathematical model The main diffi-culties with this method are the determination of two factors(i) the criteria of importance for a hydrodynamic coefficientwhich decides this coefficient will be retained or removedfrom the model (ii) the reference value of a hydrodynamiccoefficient when the real experimental data are used foridentification instead of the simulation data
332 Difference Method Besides simplification of the math-ematical model of ship manoeuvring reconstruction of theinput variables or samples provides another effective way toalleviate the parameter drift It is noted that such a recon-struction does not require a new manoeuvring to obtain newinput-output samples for system identification butmodify theobtained samples Difference method provides a simple wayto reconstruct the samples [24]
Taking (13) as an example the following discrete equationcan be obtained
Δ119903 (119896 + 1) = Δ119903 (119896) + 1205791ΔV (119896) 119880 (119896) + 1205792Δ119903 (119896)119880 (119896)+ 1205793Δ120575 (119896)1198802 (119896) + 1205794 |ΔV (119896)| ΔV (119896)+ 1205795 |ΔV (119896)| Δ119903 (119896) + 1205796 |Δ119903 (119896)| Δ119903 (119896)+ 1205797ΔV (119896) |Δ119903 (119896)| + 1205798Δ1205753 (119896)1198802 (119896)+ 1205799ΔV2 (119896) Δ120575 (119896)+ 12057910ΔV (119896) Δ1205752 (119896) 119880 (119896)+ 12057911Δ119903 (119896) Δ1205752 (119896) 119880 (119896)+ 12057912Δ1199032 (119896) Δ120575 (119896)+ 12057913Δ119903 (119896) ΔV (119896) Δ120575 (119896) + 120579141198802 (119896)
(20)
where 1205791sim14 are the linear combinations of the hydrodynamiccoefficients with respect to the sway and yaw motion [23]Define vectorsΘ = [1205791 1205792 12057914]14times1 X (119896) = [ΔV (119896) 119880 (119896) Δ119903 (119896)119880 (119896) Δ120575 (119896)
sdot 1198802 (119896) |ΔV (119896)| ΔV (119896) |ΔV (119896)| Δ119903 (119896) |Δ119903 (119896)|
sdot Δ119903 (119896) ΔV (119896) |Δ119903 (119896)| Δ1205753 (119896) 1198802 (119896) ΔV2 (119896)sdot Δ120575 (119896) ΔV (119896) Δ1205752 (119896)119880 (119896) Δ119903 (119896) Δ1205752 (119896)sdot 119880 (119896) Δ1199032 (119896) Δ120575 (119896) Δ119903 (119896) ΔV (119896)sdot Δ120575 (119896) 1198802 (119896)]119879
14times1
(21)
Equation (20) can be rewritten as
Δ119903 (119896 + 1) = Δ119903 (119896) +ΘX (119896) (22)
At a neighbour sampling time the above equation becomes
Δ119903 (119896) = Δ119903 (119896 minus 1) +ΘX (119896 minus 1) (23)
Combined with (22) the following equality holds
119911 (119896) = 119911 (119896 minus 1) +ΘY (119896 minus 1) (24)
by definition of
119911 (119896) = Δ119903 (119896 + 1) minus Δ119903 (119896) Y (119896 minus 1) = X (119896) minus X (119896 minus 1) (25)
Comparing (23) with (24) it can be seen that although theinput-output pair are altered the coefficient matrix remainsthe same Usually if the degree of linear dependence of inputvariables in the original system is serious it could be mod-erated after difference of samples As a comparison Table 3lists the correlation coefficients after the difference method isemployed as shown below the principal diagonal (elementsabove the principal diagonal are the correlation coefficientswithout difference method shown in Table 2) As can beseen the linear dependence of the input variables has beenobviously decreased
333 Additional Signal Besides the difference methodanother approach to reconstruct the input-output samplescan be used which refers to the method of additional signalSuch a method had been successfully applied to the identifi-cation of shipmanoeuvring by analyzing simulation data [23]and captive model test results [54] Taking the system (22) asan example an additional ramp signal can be designed as
119910119886 (119896 + 1) = 119910119886 (119896) + 120582 (26)
where 120582 is a constant Adding this signal to (22) a newparameter system can be obtained as
[Δ119903 (119896 + 1) + 119910119886 (119896 + 1)]= [Δ119903 (119896) + 119910a (119896)] +ΘX (119896) + 120582 (27)
where the output variable and the first input variable changehowever the parameter matrix Θ related to hydrodynamiccoefficients does not The additional signal can be viewed asan additional excitation to the original system As a result themanoeuvring characteristics of the original system which
Mathematical Problems in Engineering 7
Table 3 Comparison of correlation coefficients using difference method
1198731015840V 1198731015840119903 1198731015840|V|V 1198731015840|V|119903 1198731015840120575 1198731015840120575120575120575 1198731015840V120575120575 1198731015840VV120575 1198731015840|119903|119903 1198731015840V|119903| 1198731015840119903120575120575 1198731015840119903119903120575 1198731015840119903V1205751198731015840V 100 045 098 067 091 092 099 097 039 084 054 054 0681198731015840119903 044 100 042 084 053 054 047 043 097 066 091 075 0811198731015840|V|V 083 031 100 066 083 085 098 100 032 077 050 042 0671198731015840|V|119903 034 021 038 100 062 064 068 066 075 087 092 073 1001198731015840120575 064 044 023 001 100 099 091 083 050 083 061 071 0621198731015840120575120575120575 050 033 025 013 074 100 092 085 050 083 062 069 0641198731015840V120575120575 084 041 077 036 048 066 100 098 040 083 055 053 0691198731015840VV120575 081 031 099 039 022 029 082 100 033 077 050 042 0671198731015840|119903|119903 034 088 003 007 054 035 028 004 100 062 086 081 0721198731015840V|119903| 057 027 021 046 058 041 040 019 030 100 078 082 0891198731015840119903120575120575 019 017 008 058 021 029 009 006 005 030 100 083 0911198731015840119903119903120575 029 032 015 016 072 044 009 018 049 062 050 100 0731198731015840119903V120575 032 011 033 090 001 009 026 032 016 049 073 024 100
Table 4 Comparison of correlation coefficients using additionalsignal
1198731 119873101584011198731015840V 0465 00811198731015840119903 0996 00111198731015840|V|V 0450 00261198731015840|V|119903 0849 00021198731015840120575 0552 00281198731015840120575120575120575 0556 00221198731015840V120575120575 0491 00051198731015840VV120575 0455 00291198731015840|119903|119903 0023 08341198731015840V|119903| 0970 00391198731015840119903120575120575 0665 00151198731015840119903119903120575 0912 00131198731015840119903V120575 0771 0024
might cause the parameter drift as described in the Sec-tion 31 are changed and the parameter drift can be alleviatedresultantly From the point of view of regression analysis theintroduction of the additional signal alters the input variableswhich might alleviate the degree of linear dependencebetween the changed variables and others Takingmodel (27)as an example assuming 120582 = 1 Table 4 lists the correlationcoefficients before and after the additional signal is attachedto the samples in which 1198731 = 11987310158401 = 1 indicates that coeffi-cient of the first input variable [Δ119903(119896)+119910119886(119896)] in (27) is one Ascan be seen from the comparison results the degree of lineardependence remarkably decreases for most of variables afteran additional signal is added
It is noted that the design of additional signal dependson the characteristic of the data samples or the manoeuvringmotion For periodically nonlinear motion such as zigzagmanoeuvre or turning circle manoeuvring the linear rampsignal like (26) works well [23] for a linear motion such asoblique towing test a nonlinear additional signal is moreappropriate [54]
Table 5 Hydrodynamic coefficients of KVLCC2 (times10minus5)Value X-coef Value Y-coef Value N-coef Value
1198831015840 minus954 1198831015840119906 minus93 1198841015840V minus358 1198731015840V minus631198841015840V minus1283 1198831015840VV 149 1198841015840119903 1980 1198731015840119903 minus741198841015840119903 0 1198831015840119903119903 minus108 1198841015840120575 448 1198731015840120575 minus1651198731015840V 0 1198831015840120575120575 minus105 1198841015840|V|V minus35 1198731015840|V|V 201198731015840119903 minus107 1198831015840V119903 minus237 1198841015840|V|119903 30 1198731015840|V|119903 minus991199091015840119866 3486 1198831015840V120575 172 1198841015840|119903|119903 679 1198731015840|119903|119903 minus171198981015840 1908 1198831015840119903120575 minus433 1198841015840V|119903| 158 1198731015840V|119903| minus431198681015840119911 119 11988310158400 minus48 1198841015840120575120575120575 minus94 1198731015840120575120575120575 22
1198841015840V120575120575 minus36 1198731015840V120575120575 171198841015840VV120575 minus73 1198731015840VV120575 121198841015840119903120575120575 minus23 1198731015840119903120575120575 221198841015840119903119903120575 134 1198731015840119903119903120575 minus401198841015840119903V120575 minus28 1198731015840119903V120575 3911988410158400 minus66 11987310158400 02
4 Example Study
The abovementioned measures on how to diminish the driftof hydrodynamic coefficients including difference methodand additional signal are employed in identifying a simplifiedAbkowitz model combined with free-running model tests ofaKVLCC2 SVMbased SI is used to obtain the hydrodynamiccoefficients The details of the mathematical model of shipmanoeuvring the SVM methodology the ship and themodel tests can be found in [24] and relevant literatureTable 5 lists the identification results of the hydrodynamiccoefficients in which the addedmasses and addedmoment ofinertia are calculated by slender-body theory as stated in Sec-tion 2 Based on the regression model 25∘5∘ zigzag manoeu-vring motion is simulated and the predicted results arecomparedwith the experimental results as shown in Figure 2Comparisons with the experimental results of other twomanoeuvres are presented in Figure 3 (20∘5∘ zigzagmanoeu-vre) and Figure 4 (20∘10∘ zigzag manoeuvre) respectivelyAs can be seen good agreement between prediction and
8 Mathematical Problems in Engineering
PredictionsExperiments
20 40 60 80 100 1200
20 40 60 80 100 1200
20 40 60 80 100 1200
20 40 60 80 100 1200Time (s)
minus500
50
051
15
u(m
s)
minus050
05
(m
s)
r(∘
s)
minus505
Heading (∘) and rudder angle (∘)
Figure 2 Prediction of 25∘5∘ zigzag manoeuvre of a KCLCC2 ship
PredictionsExperiments
05
1
15
u(m
s)
20 40 60 80 100 120 140 1600minus05
0
05
(m
s)
r(∘
s)
minus5
05
minus50
050
Heading (∘) and rudder angle (∘s)
20 40 60 80 100 120 140 1600
20 40 60 80 100 120 140 1600
20 40 60 80 100 120 140 1600Time (s)
Figure 3 Prediction of 20∘5∘ zigzag manoeuvre of a KCLCC2 ship
experiment is achieved It is owing not only to the use of SVMmethod a powerful modeling tool but also to the measurestaken to diminish the parameter drift
5 Conclusions
Parameter identifiability is an important issue for the SI appli-cation to the modeling of ship manoeuvring Some parame-ters in the manoeuvring model cannot be obtained using SIwhile some parameters deviate from true values even if theycan be derived Several measures are proposed to deal withthe problem of parameter identifiability and the validitiesare demonstrated by examples To determine the addedmasses and added moment of inertia slender-body theoryprovides a simple estimationmethod Todiminish the param-eter drift effect the mathematical model of ship manoeu-vring motion is simplified on the basis of regression analysis
PredictionsExperiments
r(∘
s)
Heading (∘) and rudder angle (∘s)
minus50
050
05
1
15
u(m
s)
minus05
0
05
(m
s)
minus5
05
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800Time (s)
Figure 4 Prediction of 20∘10∘ zigzagmanoeuvre of aKCLCC2 ship
difference of the samples and additional signal also take effectThese measures can be viewed as developed approaches thatare commonly used in regression analysis to diminish themulticollinearity For instance the simplification of a modelcan be viewed as a kind of pruning-variable method or PCRanalysis since the main components in the model remainedwhile some trivial variables are removed The additionalsignal method can be viewed as the opposition to pruning-variable method
Future work will be devoted to the study on a more accu-rate practical and universal estimation method for addedmasses and added moment of inertia since slender-bodymethod gives satisfactory results only for slender ships andldquomildrdquo manoeuvres Moreover how to design an appropriateadditional signal according to the characteristics of sampleswill be studied
Competing Interests
The author declares that they have no competing interests
Acknowledgments
This work was partially supported by the Special Item forUniversity in Fujian Province supported by the EducationDepartment (no JK15003) and the Special Item supportedby the Fujian Provincial Department of Ocean and Fisheries(no MHGX-16) The author is grateful to the Hamburg ShipModel Basin (HSVA) for providing the experimental data
References
[1] International Maritime Organization (IMO) ldquoStandards forship manoeuvrabilityrdquo Resolution MSC 137(76) 2002
Mathematical Problems in Engineering 9
[2] The Maneuvering Committee of ITTC ldquoFinal report andrecommendations to the 25th ITTCrdquo in Proceedings of the 25thInternational Towing Tank Conference pp 143ndash208 FukuokaJapan 2008
[3] G Rajesh and S K Bhattacharyya ldquoSystem identification fornonlinear maneuvering of large tankers using artificial neuralnetworkrdquo Applied Ocean Research vol 30 no 4 pp 256ndash2632008
[4] L Moreira and C Guedes Soares ldquoRecursive neural networkmodel of catamaran manoeuvringrdquo International Journal ofMaritime Engineering vol 154 pp A121ndashA130 2012
[5] W L Luo and Z J Zou ldquoBlind prediction of ship manoeuvringby using Support Vector Machinesrdquo in Proceedings of the the29th International Conference on Offshore Mechanics and ArcticEngineering (OMAE rsquo10) Shanghai China June 2010
[6] W Luo L Moreira and C Guedes Soares ldquoManoeuvringsimulation of catamaran by using implicit models based onsupport vector machinesrdquo Ocean Engineering vol 82 pp 150ndash159 2014
[7] T Holzhuter ldquoRobust identification in an adaptive track con-troller for shipsrdquo in Proceedings of the 3rd IFAC Symposium onAdaptive Systems in Control and Signal Processing pp 275ndash280Glasgow UK 1989
[8] R Munoz-Mansilla J Aranda J M Dıaz and J de la CruzldquoParametricmodel identification of high-speed craft dynamicsrdquoOcean Engineering vol 36 no 12-13 pp 1025ndash1038 2009
[9] M N Hayes Parameters identification of nonlinear stochasticsystems applied to ocean vehicle dynamics [PhD thesis] Mas-sachusetts Institute of Technology CambridgeMassUSA 1971
[10] J Van Amerongen ldquoAdaptive steering of ships-a model refer-ence approachrdquo Automatica vol 20 no 1 pp 3ndash14 1984
[11] M A Abkowitz ldquoMeasurement of hydrodynamic characteristicfrom shipmaneuvering trials by system identificationrdquoTransac-tions of Society of Naval Architects andMarine Engineers vol 88pp 283ndash318 1981
[12] L P Perera P Oliveira and C Guedes Soares ldquoSystemidentification of nonlinear vessel steeringrdquo Journal of OffshoreMechanics and Arctic Engineering vol 137 no 3 Article ID031302 pp 1ndash7 2015
[13] K J Astrom ldquoMaximum likelihood and prediction errormethodsrdquo Automatica vol 16 no 5 pp 551ndash574 1980
[14] C G Kallstrom and K J Astrom ldquoExperiences of systemidentification applied to ship steeringrdquo Automatica vol 17 no1 pp 187ndash198 1981
[15] W-W Zhou and M Blanke ldquoIdentification of a class ofnonlinear state-space models using RPE techniquesrdquo IEEETransactions on Automatic Control vol 34 no 3 pp 312ndash3161989
[16] E Revestido Herrero and F J Velasco Gonzalez ldquoTwo-stepidentification of non-linear manoeuvring models of marinevesselsrdquo Ocean Engineering vol 53 pp 72ndash82 2012
[17] R P Selvam S K Bhattacharyya andMHaddara ldquoA frequencydomain system identificationmethod for linear shipmaneuver-ingrdquo International Shipbuilding Progress vol 52 no 1 pp 5ndash272005
[18] S K Bhattacharyya andM R Haddara ldquoParametric identifica-tion for nonlinear ship maneuveringrdquo Journal of Ship Researchvol 50 no 3 pp 197ndash207 2006
[19] Y Chen Y Song and M Chen ldquoParameters identificationfor ship motion model based on particle swarm optimizationrdquoKybernetes vol 39 no 6 pp 871ndash880 2010
[20] Y T Dai L Q Liu and S S Feng ldquoOn the identification of cou-pled pitch and heave motions using opposition-based particleswarm optimizationrdquo Mathematical Problems in Engineeringvol 2014 Article ID 784049 10 pages 2014
[21] K-P Rhee S-Y Lee and Y-J Sung ldquoEstimation of manoeu-vring coefficients from PMM test by genetic algorithmrdquo inProceedings of the International Symposium and Workshop onForce Acting on aManoeuvringVessel Val de Reuil France 1998
[22] S Sutulo and C Guedes Soares ldquoAn algorithm for offlineidentification of ship manoeuvring mathematical models fromfree-running testsrdquo Ocean Engineering vol 79 pp 10ndash25 2014
[23] W L Luo and Z J Zou ldquoParametric identification of shipmaneuvering models by using support vector machinesrdquo Jour-nal of Ship Research vol 53 no 1 pp 19ndash30 2009
[24] W L Luo C Guedes Soares and Z J Zou ldquoParameteridentification of ship maneuvering model based on supportvector machines and particle swarm optimizationrdquo Journalof Offshore Mechanics and Arctic Engineering vol 138 no 3Article ID 031101 8 pages 2016
[25] W Y Hwang ldquoCancellation effect and parameter identifiabilityof ship steering dynamicsrdquo International Shipbuilding Progressvol 29 no 332 pp 90ndash120 1982
[26] C G Kallstrom ldquoIdentification and adaptive control applied toship steeringrdquo Tech Rep SSPAPUB-93 1982
[27] H D Nguyen ldquoRecursive identification of ship maneuveringdynamics and hydrodynamicsrdquo in Proceedings of the 36thEMAC Annual Conference pp C717ndashC732 Reykjavik Iceland2007
[28] F J Velasco I Zamanillo E Lopez and E Moyano ldquoParameterestimation of ship linear maneuvering modelsrdquo in Proceedingsof the OCEANS 2011 IEEE Santander Conference pp 1ndash8Santander Spain June 2011
[29] M R Haddara and Y Wang ldquoParametric identification ofmanoeuvring models for shipsrdquo International ShipbuildingProgress vol 46 no 445 pp 5ndash27 1999
[30] D Hess W Faller J Lee T Fu and E Ammeen ldquoShip maneu-vering simulation in wind and waves a nonlinear time-domainapproach using recursive neural networksrdquo in Proceedings of the26th Symposium on Naval Hydrodynamics Rome Italy 2006
[31] D Hess W Faller and J Lee ldquoReal-time nonlinear simulationof maneuvers for US navy combatant DTMB 5415rdquo in Pro-ceedings of the Workshop on Verification and Validation of ShipManeuvering Simulation Methods (SIMMAN rsquo08) pp E15ndashE21Copenhagen Denmark 2008
[32] M A Abkowitz ldquoLectures on ship hydrodynamicsmdashsteeringand manoeuvrabilityrdquo Tech Rep Hy-5 Hydro- and Aerody-namics Laboratory Lyngby Denmark 1964
[33] A Ogawa and H Kasai ldquoOn the mathematical model ofmanoeuvring motion of shipsrdquo International ShipbuildingProgress vol 25 no 292 pp 306ndash319 1978
[34] K Nomoto T Tagushi K Honda and S Hirano ldquoOn steeringqualities of shipsrdquo International Shipbuilding Progress vol 4 no35 pp 354ndash370 1957
[35] S Toxopeus ldquoValidation of slender-bodymethod for predictionof linear manoeuvring coefficients using experiments andviscous-flow calculationsrdquo in Proceedings of the 7th ICHDInternational Conference on Hydrodynamics (ICHD rsquo06) pp589ndash598 University of Naples ldquoFederico IIrdquo October 2006
[36] T-I Lee K-S Ahn H-S Lee and D-K Yum ldquoOn anempirical prediction of hydrodynamic coefficients for modernship hullsrdquo in Proceedings of the International Conference on
10 Mathematical Problems in Engineering
Marine Simulation and Ship Manoeuvrability (MARSIM rsquo03)Kanazawa Japan August 2003
[37] HNorrbinNils ldquoTheory and observations on the use of amath-ematical model for ship manoeuvring in deep and confinedwatersrdquo Report No SSPA-Pub-68 Swedish State ShipbuildingExperimental Tank Goteborg 1971
[38] R-C ZhuH-QGuo G-PMiao and J-W Yu ldquoComputationalmethod for evaluation of addedmass anddamping of ship basedon CFD theoryrdquo Journal of Shanghai Jiaotong University vol 43no 2 pp 198ndash203 2009
[39] J N NewmanMarine Hydrodynamics MIT Press CambridgeMass USA 1977
[40] M S Chislett and J Strom-Tejsen ldquoPlanar motion mechanismtests and full-scale steering and maneuvering predictions for aMariner class vesselrdquo International Shipbuilding Progress vol 12pp 201ndash224 1965
[41] M Z Fabrycy ldquoMulticollinearity caused by specificationerrorsrdquo Applied Statistics vol 24 no 2 pp 250ndash254 1975
[42] W L LuoOn themodeling of shipmanoeuvring by using supportvector machines [PhD thesis] Shanghai Jiao Tong UniversityShanghai China 2009
[43] S S Bowles and H M Levin ldquoMore on multicollinearity andthe effectiveness of schoolsrdquo The Journal of Human Resourcesvol 3 no 3 pp 393ndash400 1968
[44] I Jolliffe Principal Component Analysis John Wiley amp Sons2002
[45] SWold A Ruhe HWold andW J Dunn III ldquoThe collinearityproblem in linear regression The Partial Least Squares (PLS)approach to generalized inversesrdquo SIAM Journal on Scientificand Statistical Computing vol 5 no 3 pp 735ndash743 1984
[46] A G Ivakhnenko and J A Muller ldquoPresent state and newproblems of further GMDH developmentrdquo Systems AnalysisModeling Simulation vol 20 pp 3ndash16 1995
[47] H K Yoon and K P Rhee ldquoIdentification of hydrodynamiccoefficients in ship maneuvering equations of motion byEstimation-Before-Modeling techniquerdquo Ocean Engineeringvol 30 no 18 pp 2379ndash2404 2003
[48] S M Yeon D J Yeo and K P Rhee ldquoOptimal input designfor the identification of low-speed manoeuvring mathemati-cal modelrdquo in Proceedings of the International Conference onMarine Simulation and Ship Manoeuvrability (MARSIM rsquo06)Terschelling The Netherlands June 2006
[49] W Y HwangApplication of system identification to ship maneu-vering [PhD thesis] Massachusetts Institute of TechnologyCambridge Mass USA 1980
[50] K P Rhee and K Kim ldquoA new sea trial method for estimatinghydrodynamic derivativesrdquo Ship Ocean Technology vol 3 no 3pp 25ndash44 1999
[51] M Viviani R Depascale L Sebastiani C Podenzana Bon-vino R Dattola and M Soave ldquoAlternative methods forthe identification of hydrodynamic derivatives from standardmanoeuvresrdquo in Proceedings of the International Conference onMarine Simulation and Ship Manoeuvrability (MARSIM rsquo03)Kanazawa Japan August 2003
[52] W-L Luo and Z-J Zou ldquoElimination of simultaneous driftand sensitivity analysis in the hydrodynamic modeling of shipmanoeuvringrdquo Journal of Shanghai Jiaotong University vol 42no 8 pp 1358ndash1362 2008
[53] R R Shenoi P Krishnankutty and R P Selvam ldquoSensitivitystudy of hydrodynamic derivative variations on the maneu-verability prediction of a container shiprdquo in Proceedings of the
ASME 34th International Conference on Ocean Offshore andArctic Engineering (OMAE rsquo15) American Society ofMechanicalEngineers June 2015
[54] W L Luo and Z J Zou ldquoAnalysis of captive model obliquetowing test by using least squares support vector machinesrdquoShipbuilding of China vol 51 no 2 pp 10ndash14 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
Table 1 Added masses and added moment of inertia (times10minus5)Coefficient Slender-body theory Captive model test1198831015840 minus399 minus421198841015840V minus728 minus7481198841015840119903 0 minus93541198731015840V 0 46461198731015840119903 minus607 minus438
Equation (1) can be written as
= 119875minus1119860119883 + 119875minus1119861120575 (3)
if 119875 is invertibleUsing SI two matrix combinations in (3) that is 119875minus1119860
and 119875minus1119861 can be determined however the three coefficientmatrices 119875 119860 and 119861 cannot be obtained separately Onesolution is to determine one coefficientmatrix first in anotherway for example the slender-body theory empirical formulacaptive model test or CFD calculation Usually but notalways the mass matrix 119875 is selected to be predeterminedin that the abovementioned methods have been successfullyapplied to determine the added masses and added momentof inertia for example [35ndash38] Among these methods theslender-body theory provides a simple but effective wayTable 1 lists the comparison results of nondimensional addedmasses and addedmoment of inertia between the calculationbased on slender-body theory [39] and captivemodel tests foraMariner ship [40] It is assumed that the ship is symmetricalabout 119910119911 plane in calculation as such 1198841015840119903 = 1198731015840V = 0
As can be seen from the comparison results the slender-body theory gives a satisfactory estimation of three importanthydrodynamic derivatives 1198831015840 1198841015840V and 1198731015840119903 Combined withfree-running model tests SVM based SI was used to identifythe hydrodynamic derivatives in an Abkowitz model exceptfor the added masses and added moment of inertia that wereobtained by slender-body method [24]
3 Parameter Drift andDiminishment Measures
Another kind of parameter identifiability referred to asthe parameter drift or simultaneous drift of parameters ismore difficult to deal with especially for the identificationof a complicated manoeuvring model such as an Abkowitzmodel or a nonlinearMMGmodel As aforementioned whenparameter drift happens the identified parameters might bemathematically correct but physically incorrect Even worsethe ldquomathematically correctrdquo parameters cannot be obtained
The reason for the drift of hydrodynamic coefficientshas not been made fully clear physically Hwang applied theslender-body theory to explain the mechanism of the drift oflinear hydrodynamic coefficients which is due to the dynamiccancellation [25] However for the drift of nonlinear hydro-dynamic coefficients it can only be explained from the pointof view of regression analysis not physically but statisticallyThe drift of nonlinear hydrodynamic coefficients is due tothe so-called multicollinearity [23] In fact many nonlinear
hydrodynamic coefficients in themathematical model of shipmanoeuvring motion have no clear physical meaning
31 Simultaneous Drift of Linear Hydrodynamic CoefficientsBrief explanation of the simultaneous drift of linear hydro-dynamic coefficients is given as follows More details can befound in [11 25]
For a slender ship moving on the horizontal plane theviscous sway force and yawmoment can be calculated as [39]
119884 = minus1212058812058711988921199060 (V + 1
2119871119903) 119873 = minus1
412058812058711988921198711199060 (V + 12119871119903)
(4)
where 120588 is the fluid density 119889 is the draft of the ship 1199060 is theservice speed of the ship assuming 119906 asymp 1199060 and 119871 the lengthof ship The above two expressions can be rewritten as
119884 = 119884VV + 119884119903119903119873 = 119873VV + 119873119903119903 (5)
in terms of hydrodynamic derivatives and motion variablesIt can be inferred that
119884V119884119903 = 119873V119873119903 = 2119871 (6)
During a ship manoeuvre the pivot of the ship is near to thebow therefore it follows that
V + 12119871119903 asymp 0 (7)
which indicates that
119884VV + 119884119903119903 asymp 0 (8)
119873VV + 119873119903119903 asymp 0 (9)
Combinedwith (6) it can be inferred that two pairs of param-eters that is 119884V and 119884119903 119873V and 119873119903 are allowed to becomelarger or smaller simultaneously Figure 1 presents the simu-lation results of nondimensional linear components of swayforce and yawmoment for the 10∘10∘ zigzag manoeuvre of aMariner vessel [40] As can be seen the sway force andyaw moment are small at the helming stage when rudderangle switches At the steady stage when rudder angle keepsunchanged the following approximations hold
1198841015840VV1015840 + 11988410158401199031199031015840 asymp 1198961119884101584012057512057510158401198731015840VV1015840 + 11987310158401199031199031015840 asymp 119896211987310158401205751205751015840
V1015840 asymp 119896312057510158401199031015840 asymp 11989641205751015840
(10)
where 1198961sim4 are constants Based on the above approximationstwo linear expressions can be obtained as
11989631198841015840V + 11989641198841015840119903 asymp 1198961119884101584012057511989631198731015840V + 11989641198731015840119903 asymp 11989621198731015840120575
(11)
4 Mathematical Problems in Engineering
Nondimensional linear Y-force componentstimes10minus3
100 200 300 400 500 6000t (sec)
minus15
minus1
minus05
0
05
1
15
Nondimensional linear N-moment components
N998400
998400+ N
998400
rr998400
N998400
120575120575998400
N998400
998400
N998400
rr998400
times10minus4
100 200 300 400 500 6000t (sec)
minus4
minus2
0
2
4
Y998400
998400+ Y
998400
rr998400
Y998400
120575120575998400
Y998400
998400
Y998400
rr998400
Figure 1 Nondimensional linear components of sway force and yawmoment for 10∘10∘ zigzag manoeuvre of aMariner vessel
which means that the elements within the parameter set1198841015840V 1198841015840119903 1198841015840120575 or 1198731015840V 1198731015840119903 1198731015840120575 possibly drift simultaneously
32 Drift of Nonlinear Hydrodynamic Coefficients From thepoint of view of regression analysis the drift of hydrodynamiccoefficients linear andor nonlinear results from the so-called multicollinearity It can be explained that if the inputvariables of a mathematical model are strongly linearlydependent on each other their corresponding coefficients inthe regressionmodelmight be incorrect even if the predictedresults based on the regression model do agree well withthe desired The case is more possible and serious especiallywhen the system contains a large number of parameters to beidentified Equations (8) and (9) present simple examples oflinear dependence It can be inferred that V and 119903 are linearlydependent on each other This implies that there existsmulticollinearity in themodel which results in the parameterdrift of 119884V and 119884119903 for (8) and 119873V and 119873119903 for (9)
It is noted that multicollinearity is a commonplace in theregression analysis [41] not a special effect that happens inthe system identification of shipmanoeuvringMoreover thisphenomenon cannot be eliminated but only moderated ordiminished because the input variables are always linearlydependent on each other more or less
It is important to assess the degree of multicollinearity ina system before diminishment measures are taken Commonused assessment tools include 119865- and 119905-tests Variance Infla-tion Factor (VIF) or tolerance (reciprocal ofVIF) eigenanaly-sis determination coefficient and correlation coefficientThe
last method provides a simple and effective way Using thismethod a correlation coefficient between two variables 1199091and 1199092 can be defined as
12058811990911199092
= cov (1199091 1199092)radic119863 (1199091)119863 (1199092)
(12)
where 119863(1199091) and 119863(1199092) denote the variance and cov (1199091 1199092)denotes the covariance Usually the nearer to one the absolutevalue of 120588119909
11199092
approximates the more serious the lineardependence between 1199091 and 1199092 is An example is given withrespect to a nonlinear ship manoeuvring model in which thenondimensional yaw-equation can be described as
(11989810158401199091015840119866 minus 1198731015840V) ΔV1015840 + (1198681015840119911119911 minus 1198731015840119903) Δ 1199031015840= Δ11989110158403 (Δ1199061015840 ΔV1015840 Δ1199031015840 Δ1205751015840) (13)
where Δ1199061015840 ΔV1015840 Δ1199031015840 and Δ1205751015840 are small perturbations fromnominal values of surge speed sway speed yaw rate andrudder angle respectivelyThe nonlinear functionΔ11989110158403 on theright-hand side of (13) can be expressed as [42]
Δ11989110158403 = 1198731015840VΔV1015840 + 1198731015840119903Δ1199031015840 + 1198731015840120575Δ1205751015840 + 1198731015840|V|V 10038161003816100381610038161003816ΔV101584010038161003816100381610038161003816 ΔV1015840+ 1198731015840|V|119903 10038161003816100381610038161003816ΔV101584010038161003816100381610038161003816 Δ1199031015840 + 1198731015840|119903|119903 10038161003816100381610038161003816Δ119903101584010038161003816100381610038161003816 Δ1199031015840+ 1198731015840V|119903|ΔV1015840 10038161003816100381610038161003816Δ119903101584010038161003816100381610038161003816 + 1198731015840120575120575120575Δ12057510158403 + 1198731015840VV120575ΔV10158402Δ1205751015840+ 1198731015840VV120575ΔV1015840Δ12057510158402 + 1198731015840119903120575120575Δ1199031015840Δ12057510158402 + 1198731015840119903119903120575Δ11990310158402Δ1205751015840+ 1198731015840119903V120575Δ1199031015840ΔV1015840Δ1205751015840 + 11987310158400
(14)
Combined with the test data of 25∘5∘ zigzag manoeuvre ofa KVLCC2 ship which was conducted in the Hamburg ShipModel Basin (HSVA) the correlation coefficients of variablesin (14) can be calculated as listed in Table 2 As can be seenthe degree of linear dependence is heavy for some variablesfor instance ΔV1015840 and ΔV1015840Δ12057510158402 with the correlation coefficient099 A heavymulticollinearitymight exist with respect to thesystem (14) which results in the parameter drift not only forthe linear parameters but also the nonlinear parameters
33 Measures to Diminish the Drift of Hydrodynamic Coeffi-cients From the above discussion it can be concluded thatmulticollinearity is the main reason for the drift of hydrody-namic coefficients especially for the nonlinear onesThereforethe alleviation of multicollinearity is vital for the diminish-ment of parameter drift
Several remedies are available to moderate the degree ofmulticollinearity for instance difference method pruning-variable method [43] principal component regression (PCR)analysis [44] partial least squares (PLS) [45] and a groupmethod of data handling (GMDH) [46] Some of them weredeveloped to diminish the drift of hydrodynamic coefficientsFor example Hwang proposed parallel processing exagger-ated over- and underestimation parameter transformation tomoderate the drift of linear hydrodynamic coefficients [25]
Mathematical Problems in Engineering 5
Table 2 Matrix of correlation coefficients
1198731015840V 1198731015840119903 1198731015840|V|V 1198731015840|V|119903 1198731015840120575 1198731015840120575120575120575 1198731015840V120575120575 1198731015840VV120575 1198731015840|119903|119903 1198731015840V|119903| 1198731015840119903120575120575 1198731015840119903119903120575 1198731015840119903V1205751198731015840V 100 045 098 067 091 092 099 097 039 084 054 054 0681198731015840119903 100 042 084 053 054 047 043 097 066 091 075 0811198731015840|V|V 100 066 083 085 098 100 032 077 050 042 0671198731015840|V|119903 100 062 064 068 066 075 087 092 073 1001198731015840120575 100 099 091 083 050 083 061 071 0621198731015840120575120575120575 100 092 085 050 083 062 069 0641198731015840V120575120575 100 098 040 083 055 053 0691198731015840VV120575 100 033 077 050 042 0671198731015840|119903|119903 100 062 086 081 0721198731015840V|119903| 100 078 082 0891198731015840119903120575120575 100 083 0911198731015840119903119903120575 100 0731198731015840119903V120575 100
For nonlinear hydrodynamic coefficients ridge regressionand modification of input scenario were proposed [47 48]However for given samples from real manoeuvring testssuch a modification of excitation might be not applicable inother words this approach might only work for simulationdata
Since the multicollinearity is an inherent characteristicof a regression model besides the regression tool (eg LSand EKF) modification of the model is a direct and effectiveway to alleviate the multicollinearity which can be achievedby altering the structure of the model and reconstructing theinput variables in the model with the aim to decrease thelinear dependence of variables Based on these ideas threeapproaches are presented to diminish the drift of hydrody-namic coefficients including simplification of the manoeu-vring model difference of the samples and the method ofadditional signal Studies are performed mainly combinedwith the Abkowitz model
331 Simplification of the Manoeuvring Model Although theAbkowitz model is often preferred in the prediction of shipmanoeuvring such a ldquolargerdquo parametric system makes itinconvenient to use in practice Actually some nonlinearderivatives are difficult to be determined although they couldbe unimportant In practical application of the Abkowitzmodel simplification had been performed to improve thefeasibility of this model Examples are the work by Abkowitz[11] and Norrbin Nils [37] Physical meanings were the mainconcern in the simplification The simplification can also beperformed from the point of view of regression analysis [24]Taking the yaw-equation (13) as an example the originalexpression of (14) is
Δ11989110158403 = 11987310158400119906Δ1199061015840 + 11987310158400119906119906Δ11990610158402 + 1198731015840VΔV1015840 + 1198731015840119903Δ1199031015840+ 1198731015840120575Δ1205751015840 + 1198731015840VVVΔV10158403 + 1198731015840120575120575120575Δ12057510158403+ 1198731015840VV119903ΔV10158402Δ1199031015840 + 1198731015840VV120575ΔV10158402Δ1205751015840 + 1198731015840V120575120575ΔV1015840Δ12057510158402
+ 1198731015840120575119906Δ1205751015840Δ1199061015840 + 1198731015840V119906ΔV1015840Δ1199061015840 + 1198731015840119903119906Δ1199031015840Δ1199061015840+ 1198731015840120575119906119906Δ1205751015840Δ11990610158402 + 1198731015840119903119903119903Δ11990310158403 + 1198731015840V119903119903ΔV1015840Δ11990310158402+ 1198731015840V119906119906ΔV1015840Δ11990610158402 + 1198731015840119903119906119906Δ1199031015840Δ11990610158402 + 1198731015840119903120575120575Δ1199031015840Δ12057510158402+ 1198731015840119903119903120575Δ11990310158402Δ1205751015840 + 1198731015840119903V120575Δ1199031015840ΔV1015840Δ1205751015840 + 11987310158400
(15)
in which 22 hydrodynamic coefficients are contained [40]To simplify it all the nonlinear terms related to the surgeperturbation Δ1199061015840 are eliminated for two reasons First sincethe ship total velocity 119880(119905) is taken as the nondimensionalfactor the effect of velocity loss has been taken into account inevery velocity term Second the linear dependence betweenthe linear and nonlinear terms relating to Δ1199061015840 is significantwhichwill result in the parameter drift For example the thirdand twelfth terms on the right hand side of (15) at the 119896thsampling time can be written as
1198731015840VΔV (119896) 119880 (119896) + 1198731015840V119906ΔV (119896) Δ119906 (119896) (16)
by considering the prime nondimensional definition
Δ1199061015840 = Δ119906119880
Δ1015840 = Δ(1198802119871)
(17)
For moderate manoeuvres it holds that
119880 (119896) asymp 1199060 + Δ119906 (119896) (18)
The expression (16) can be written as
1198731015840VΔV (119896) 1199060 + 1198731015840VΔV (119896) Δ119906 (119896) + 1198731015840V119906ΔV (119896) Δ119906 (119896) (19)
Obviously the second term is linearly dependent on thethird term In consideration of the significance of the linearderivative1198731015840V the nonlinear term1198731015840V119906ΔV(119896)Δ119906(119896) is removed
6 Mathematical Problems in Engineering
In the same way the other six terms related to the derivatives11987310158400119906119906 1198731015840120575119906 1198731015840119903119906 1198731015840120575119906119906 1198731015840V119906119906 and 1198731015840119903119906119906 can be removed from(15) Ignoring the effect of surge speed 119906 on the change of yawmoment 11987310158400119906Δ1199061015840 can be removed furthermore Finally byintroducing the cross flow models to replace the third-ordernonlinear terms model (15) is simplified to model (14) withthe number of hydrodynamic coefficients decreasing from 22to 14
Sensitivity analysis provides another way to simplify themathematical model of ship manoeuvring [49ndash53] Usingthis method the effect of the hydrodynamic coefficient onthe prediction of ship manoeuvring is studied by observingthe change of manoeuvring (eg velocity angular velocityadvance transfer overshoots and tactical diameter) to thechange of hydrodynamic coefficients Based on the results ofsensitivity analysis some trivial hydrodynamic coefficientsare removed from the mathematical model The main diffi-culties with this method are the determination of two factors(i) the criteria of importance for a hydrodynamic coefficientwhich decides this coefficient will be retained or removedfrom the model (ii) the reference value of a hydrodynamiccoefficient when the real experimental data are used foridentification instead of the simulation data
332 Difference Method Besides simplification of the math-ematical model of ship manoeuvring reconstruction of theinput variables or samples provides another effective way toalleviate the parameter drift It is noted that such a recon-struction does not require a new manoeuvring to obtain newinput-output samples for system identification butmodify theobtained samples Difference method provides a simple wayto reconstruct the samples [24]
Taking (13) as an example the following discrete equationcan be obtained
Δ119903 (119896 + 1) = Δ119903 (119896) + 1205791ΔV (119896) 119880 (119896) + 1205792Δ119903 (119896)119880 (119896)+ 1205793Δ120575 (119896)1198802 (119896) + 1205794 |ΔV (119896)| ΔV (119896)+ 1205795 |ΔV (119896)| Δ119903 (119896) + 1205796 |Δ119903 (119896)| Δ119903 (119896)+ 1205797ΔV (119896) |Δ119903 (119896)| + 1205798Δ1205753 (119896)1198802 (119896)+ 1205799ΔV2 (119896) Δ120575 (119896)+ 12057910ΔV (119896) Δ1205752 (119896) 119880 (119896)+ 12057911Δ119903 (119896) Δ1205752 (119896) 119880 (119896)+ 12057912Δ1199032 (119896) Δ120575 (119896)+ 12057913Δ119903 (119896) ΔV (119896) Δ120575 (119896) + 120579141198802 (119896)
(20)
where 1205791sim14 are the linear combinations of the hydrodynamiccoefficients with respect to the sway and yaw motion [23]Define vectorsΘ = [1205791 1205792 12057914]14times1 X (119896) = [ΔV (119896) 119880 (119896) Δ119903 (119896)119880 (119896) Δ120575 (119896)
sdot 1198802 (119896) |ΔV (119896)| ΔV (119896) |ΔV (119896)| Δ119903 (119896) |Δ119903 (119896)|
sdot Δ119903 (119896) ΔV (119896) |Δ119903 (119896)| Δ1205753 (119896) 1198802 (119896) ΔV2 (119896)sdot Δ120575 (119896) ΔV (119896) Δ1205752 (119896)119880 (119896) Δ119903 (119896) Δ1205752 (119896)sdot 119880 (119896) Δ1199032 (119896) Δ120575 (119896) Δ119903 (119896) ΔV (119896)sdot Δ120575 (119896) 1198802 (119896)]119879
14times1
(21)
Equation (20) can be rewritten as
Δ119903 (119896 + 1) = Δ119903 (119896) +ΘX (119896) (22)
At a neighbour sampling time the above equation becomes
Δ119903 (119896) = Δ119903 (119896 minus 1) +ΘX (119896 minus 1) (23)
Combined with (22) the following equality holds
119911 (119896) = 119911 (119896 minus 1) +ΘY (119896 minus 1) (24)
by definition of
119911 (119896) = Δ119903 (119896 + 1) minus Δ119903 (119896) Y (119896 minus 1) = X (119896) minus X (119896 minus 1) (25)
Comparing (23) with (24) it can be seen that although theinput-output pair are altered the coefficient matrix remainsthe same Usually if the degree of linear dependence of inputvariables in the original system is serious it could be mod-erated after difference of samples As a comparison Table 3lists the correlation coefficients after the difference method isemployed as shown below the principal diagonal (elementsabove the principal diagonal are the correlation coefficientswithout difference method shown in Table 2) As can beseen the linear dependence of the input variables has beenobviously decreased
333 Additional Signal Besides the difference methodanother approach to reconstruct the input-output samplescan be used which refers to the method of additional signalSuch a method had been successfully applied to the identifi-cation of shipmanoeuvring by analyzing simulation data [23]and captive model test results [54] Taking the system (22) asan example an additional ramp signal can be designed as
119910119886 (119896 + 1) = 119910119886 (119896) + 120582 (26)
where 120582 is a constant Adding this signal to (22) a newparameter system can be obtained as
[Δ119903 (119896 + 1) + 119910119886 (119896 + 1)]= [Δ119903 (119896) + 119910a (119896)] +ΘX (119896) + 120582 (27)
where the output variable and the first input variable changehowever the parameter matrix Θ related to hydrodynamiccoefficients does not The additional signal can be viewed asan additional excitation to the original system As a result themanoeuvring characteristics of the original system which
Mathematical Problems in Engineering 7
Table 3 Comparison of correlation coefficients using difference method
1198731015840V 1198731015840119903 1198731015840|V|V 1198731015840|V|119903 1198731015840120575 1198731015840120575120575120575 1198731015840V120575120575 1198731015840VV120575 1198731015840|119903|119903 1198731015840V|119903| 1198731015840119903120575120575 1198731015840119903119903120575 1198731015840119903V1205751198731015840V 100 045 098 067 091 092 099 097 039 084 054 054 0681198731015840119903 044 100 042 084 053 054 047 043 097 066 091 075 0811198731015840|V|V 083 031 100 066 083 085 098 100 032 077 050 042 0671198731015840|V|119903 034 021 038 100 062 064 068 066 075 087 092 073 1001198731015840120575 064 044 023 001 100 099 091 083 050 083 061 071 0621198731015840120575120575120575 050 033 025 013 074 100 092 085 050 083 062 069 0641198731015840V120575120575 084 041 077 036 048 066 100 098 040 083 055 053 0691198731015840VV120575 081 031 099 039 022 029 082 100 033 077 050 042 0671198731015840|119903|119903 034 088 003 007 054 035 028 004 100 062 086 081 0721198731015840V|119903| 057 027 021 046 058 041 040 019 030 100 078 082 0891198731015840119903120575120575 019 017 008 058 021 029 009 006 005 030 100 083 0911198731015840119903119903120575 029 032 015 016 072 044 009 018 049 062 050 100 0731198731015840119903V120575 032 011 033 090 001 009 026 032 016 049 073 024 100
Table 4 Comparison of correlation coefficients using additionalsignal
1198731 119873101584011198731015840V 0465 00811198731015840119903 0996 00111198731015840|V|V 0450 00261198731015840|V|119903 0849 00021198731015840120575 0552 00281198731015840120575120575120575 0556 00221198731015840V120575120575 0491 00051198731015840VV120575 0455 00291198731015840|119903|119903 0023 08341198731015840V|119903| 0970 00391198731015840119903120575120575 0665 00151198731015840119903119903120575 0912 00131198731015840119903V120575 0771 0024
might cause the parameter drift as described in the Sec-tion 31 are changed and the parameter drift can be alleviatedresultantly From the point of view of regression analysis theintroduction of the additional signal alters the input variableswhich might alleviate the degree of linear dependencebetween the changed variables and others Takingmodel (27)as an example assuming 120582 = 1 Table 4 lists the correlationcoefficients before and after the additional signal is attachedto the samples in which 1198731 = 11987310158401 = 1 indicates that coeffi-cient of the first input variable [Δ119903(119896)+119910119886(119896)] in (27) is one Ascan be seen from the comparison results the degree of lineardependence remarkably decreases for most of variables afteran additional signal is added
It is noted that the design of additional signal dependson the characteristic of the data samples or the manoeuvringmotion For periodically nonlinear motion such as zigzagmanoeuvre or turning circle manoeuvring the linear rampsignal like (26) works well [23] for a linear motion such asoblique towing test a nonlinear additional signal is moreappropriate [54]
Table 5 Hydrodynamic coefficients of KVLCC2 (times10minus5)Value X-coef Value Y-coef Value N-coef Value
1198831015840 minus954 1198831015840119906 minus93 1198841015840V minus358 1198731015840V minus631198841015840V minus1283 1198831015840VV 149 1198841015840119903 1980 1198731015840119903 minus741198841015840119903 0 1198831015840119903119903 minus108 1198841015840120575 448 1198731015840120575 minus1651198731015840V 0 1198831015840120575120575 minus105 1198841015840|V|V minus35 1198731015840|V|V 201198731015840119903 minus107 1198831015840V119903 minus237 1198841015840|V|119903 30 1198731015840|V|119903 minus991199091015840119866 3486 1198831015840V120575 172 1198841015840|119903|119903 679 1198731015840|119903|119903 minus171198981015840 1908 1198831015840119903120575 minus433 1198841015840V|119903| 158 1198731015840V|119903| minus431198681015840119911 119 11988310158400 minus48 1198841015840120575120575120575 minus94 1198731015840120575120575120575 22
1198841015840V120575120575 minus36 1198731015840V120575120575 171198841015840VV120575 minus73 1198731015840VV120575 121198841015840119903120575120575 minus23 1198731015840119903120575120575 221198841015840119903119903120575 134 1198731015840119903119903120575 minus401198841015840119903V120575 minus28 1198731015840119903V120575 3911988410158400 minus66 11987310158400 02
4 Example Study
The abovementioned measures on how to diminish the driftof hydrodynamic coefficients including difference methodand additional signal are employed in identifying a simplifiedAbkowitz model combined with free-running model tests ofaKVLCC2 SVMbased SI is used to obtain the hydrodynamiccoefficients The details of the mathematical model of shipmanoeuvring the SVM methodology the ship and themodel tests can be found in [24] and relevant literatureTable 5 lists the identification results of the hydrodynamiccoefficients in which the addedmasses and addedmoment ofinertia are calculated by slender-body theory as stated in Sec-tion 2 Based on the regression model 25∘5∘ zigzag manoeu-vring motion is simulated and the predicted results arecomparedwith the experimental results as shown in Figure 2Comparisons with the experimental results of other twomanoeuvres are presented in Figure 3 (20∘5∘ zigzagmanoeu-vre) and Figure 4 (20∘10∘ zigzag manoeuvre) respectivelyAs can be seen good agreement between prediction and
8 Mathematical Problems in Engineering
PredictionsExperiments
20 40 60 80 100 1200
20 40 60 80 100 1200
20 40 60 80 100 1200
20 40 60 80 100 1200Time (s)
minus500
50
051
15
u(m
s)
minus050
05
(m
s)
r(∘
s)
minus505
Heading (∘) and rudder angle (∘)
Figure 2 Prediction of 25∘5∘ zigzag manoeuvre of a KCLCC2 ship
PredictionsExperiments
05
1
15
u(m
s)
20 40 60 80 100 120 140 1600minus05
0
05
(m
s)
r(∘
s)
minus5
05
minus50
050
Heading (∘) and rudder angle (∘s)
20 40 60 80 100 120 140 1600
20 40 60 80 100 120 140 1600
20 40 60 80 100 120 140 1600Time (s)
Figure 3 Prediction of 20∘5∘ zigzag manoeuvre of a KCLCC2 ship
experiment is achieved It is owing not only to the use of SVMmethod a powerful modeling tool but also to the measurestaken to diminish the parameter drift
5 Conclusions
Parameter identifiability is an important issue for the SI appli-cation to the modeling of ship manoeuvring Some parame-ters in the manoeuvring model cannot be obtained using SIwhile some parameters deviate from true values even if theycan be derived Several measures are proposed to deal withthe problem of parameter identifiability and the validitiesare demonstrated by examples To determine the addedmasses and added moment of inertia slender-body theoryprovides a simple estimationmethod Todiminish the param-eter drift effect the mathematical model of ship manoeu-vring motion is simplified on the basis of regression analysis
PredictionsExperiments
r(∘
s)
Heading (∘) and rudder angle (∘s)
minus50
050
05
1
15
u(m
s)
minus05
0
05
(m
s)
minus5
05
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800Time (s)
Figure 4 Prediction of 20∘10∘ zigzagmanoeuvre of aKCLCC2 ship
difference of the samples and additional signal also take effectThese measures can be viewed as developed approaches thatare commonly used in regression analysis to diminish themulticollinearity For instance the simplification of a modelcan be viewed as a kind of pruning-variable method or PCRanalysis since the main components in the model remainedwhile some trivial variables are removed The additionalsignal method can be viewed as the opposition to pruning-variable method
Future work will be devoted to the study on a more accu-rate practical and universal estimation method for addedmasses and added moment of inertia since slender-bodymethod gives satisfactory results only for slender ships andldquomildrdquo manoeuvres Moreover how to design an appropriateadditional signal according to the characteristics of sampleswill be studied
Competing Interests
The author declares that they have no competing interests
Acknowledgments
This work was partially supported by the Special Item forUniversity in Fujian Province supported by the EducationDepartment (no JK15003) and the Special Item supportedby the Fujian Provincial Department of Ocean and Fisheries(no MHGX-16) The author is grateful to the Hamburg ShipModel Basin (HSVA) for providing the experimental data
References
[1] International Maritime Organization (IMO) ldquoStandards forship manoeuvrabilityrdquo Resolution MSC 137(76) 2002
Mathematical Problems in Engineering 9
[2] The Maneuvering Committee of ITTC ldquoFinal report andrecommendations to the 25th ITTCrdquo in Proceedings of the 25thInternational Towing Tank Conference pp 143ndash208 FukuokaJapan 2008
[3] G Rajesh and S K Bhattacharyya ldquoSystem identification fornonlinear maneuvering of large tankers using artificial neuralnetworkrdquo Applied Ocean Research vol 30 no 4 pp 256ndash2632008
[4] L Moreira and C Guedes Soares ldquoRecursive neural networkmodel of catamaran manoeuvringrdquo International Journal ofMaritime Engineering vol 154 pp A121ndashA130 2012
[5] W L Luo and Z J Zou ldquoBlind prediction of ship manoeuvringby using Support Vector Machinesrdquo in Proceedings of the the29th International Conference on Offshore Mechanics and ArcticEngineering (OMAE rsquo10) Shanghai China June 2010
[6] W Luo L Moreira and C Guedes Soares ldquoManoeuvringsimulation of catamaran by using implicit models based onsupport vector machinesrdquo Ocean Engineering vol 82 pp 150ndash159 2014
[7] T Holzhuter ldquoRobust identification in an adaptive track con-troller for shipsrdquo in Proceedings of the 3rd IFAC Symposium onAdaptive Systems in Control and Signal Processing pp 275ndash280Glasgow UK 1989
[8] R Munoz-Mansilla J Aranda J M Dıaz and J de la CruzldquoParametricmodel identification of high-speed craft dynamicsrdquoOcean Engineering vol 36 no 12-13 pp 1025ndash1038 2009
[9] M N Hayes Parameters identification of nonlinear stochasticsystems applied to ocean vehicle dynamics [PhD thesis] Mas-sachusetts Institute of Technology CambridgeMassUSA 1971
[10] J Van Amerongen ldquoAdaptive steering of ships-a model refer-ence approachrdquo Automatica vol 20 no 1 pp 3ndash14 1984
[11] M A Abkowitz ldquoMeasurement of hydrodynamic characteristicfrom shipmaneuvering trials by system identificationrdquoTransac-tions of Society of Naval Architects andMarine Engineers vol 88pp 283ndash318 1981
[12] L P Perera P Oliveira and C Guedes Soares ldquoSystemidentification of nonlinear vessel steeringrdquo Journal of OffshoreMechanics and Arctic Engineering vol 137 no 3 Article ID031302 pp 1ndash7 2015
[13] K J Astrom ldquoMaximum likelihood and prediction errormethodsrdquo Automatica vol 16 no 5 pp 551ndash574 1980
[14] C G Kallstrom and K J Astrom ldquoExperiences of systemidentification applied to ship steeringrdquo Automatica vol 17 no1 pp 187ndash198 1981
[15] W-W Zhou and M Blanke ldquoIdentification of a class ofnonlinear state-space models using RPE techniquesrdquo IEEETransactions on Automatic Control vol 34 no 3 pp 312ndash3161989
[16] E Revestido Herrero and F J Velasco Gonzalez ldquoTwo-stepidentification of non-linear manoeuvring models of marinevesselsrdquo Ocean Engineering vol 53 pp 72ndash82 2012
[17] R P Selvam S K Bhattacharyya andMHaddara ldquoA frequencydomain system identificationmethod for linear shipmaneuver-ingrdquo International Shipbuilding Progress vol 52 no 1 pp 5ndash272005
[18] S K Bhattacharyya andM R Haddara ldquoParametric identifica-tion for nonlinear ship maneuveringrdquo Journal of Ship Researchvol 50 no 3 pp 197ndash207 2006
[19] Y Chen Y Song and M Chen ldquoParameters identificationfor ship motion model based on particle swarm optimizationrdquoKybernetes vol 39 no 6 pp 871ndash880 2010
[20] Y T Dai L Q Liu and S S Feng ldquoOn the identification of cou-pled pitch and heave motions using opposition-based particleswarm optimizationrdquo Mathematical Problems in Engineeringvol 2014 Article ID 784049 10 pages 2014
[21] K-P Rhee S-Y Lee and Y-J Sung ldquoEstimation of manoeu-vring coefficients from PMM test by genetic algorithmrdquo inProceedings of the International Symposium and Workshop onForce Acting on aManoeuvringVessel Val de Reuil France 1998
[22] S Sutulo and C Guedes Soares ldquoAn algorithm for offlineidentification of ship manoeuvring mathematical models fromfree-running testsrdquo Ocean Engineering vol 79 pp 10ndash25 2014
[23] W L Luo and Z J Zou ldquoParametric identification of shipmaneuvering models by using support vector machinesrdquo Jour-nal of Ship Research vol 53 no 1 pp 19ndash30 2009
[24] W L Luo C Guedes Soares and Z J Zou ldquoParameteridentification of ship maneuvering model based on supportvector machines and particle swarm optimizationrdquo Journalof Offshore Mechanics and Arctic Engineering vol 138 no 3Article ID 031101 8 pages 2016
[25] W Y Hwang ldquoCancellation effect and parameter identifiabilityof ship steering dynamicsrdquo International Shipbuilding Progressvol 29 no 332 pp 90ndash120 1982
[26] C G Kallstrom ldquoIdentification and adaptive control applied toship steeringrdquo Tech Rep SSPAPUB-93 1982
[27] H D Nguyen ldquoRecursive identification of ship maneuveringdynamics and hydrodynamicsrdquo in Proceedings of the 36thEMAC Annual Conference pp C717ndashC732 Reykjavik Iceland2007
[28] F J Velasco I Zamanillo E Lopez and E Moyano ldquoParameterestimation of ship linear maneuvering modelsrdquo in Proceedingsof the OCEANS 2011 IEEE Santander Conference pp 1ndash8Santander Spain June 2011
[29] M R Haddara and Y Wang ldquoParametric identification ofmanoeuvring models for shipsrdquo International ShipbuildingProgress vol 46 no 445 pp 5ndash27 1999
[30] D Hess W Faller J Lee T Fu and E Ammeen ldquoShip maneu-vering simulation in wind and waves a nonlinear time-domainapproach using recursive neural networksrdquo in Proceedings of the26th Symposium on Naval Hydrodynamics Rome Italy 2006
[31] D Hess W Faller and J Lee ldquoReal-time nonlinear simulationof maneuvers for US navy combatant DTMB 5415rdquo in Pro-ceedings of the Workshop on Verification and Validation of ShipManeuvering Simulation Methods (SIMMAN rsquo08) pp E15ndashE21Copenhagen Denmark 2008
[32] M A Abkowitz ldquoLectures on ship hydrodynamicsmdashsteeringand manoeuvrabilityrdquo Tech Rep Hy-5 Hydro- and Aerody-namics Laboratory Lyngby Denmark 1964
[33] A Ogawa and H Kasai ldquoOn the mathematical model ofmanoeuvring motion of shipsrdquo International ShipbuildingProgress vol 25 no 292 pp 306ndash319 1978
[34] K Nomoto T Tagushi K Honda and S Hirano ldquoOn steeringqualities of shipsrdquo International Shipbuilding Progress vol 4 no35 pp 354ndash370 1957
[35] S Toxopeus ldquoValidation of slender-bodymethod for predictionof linear manoeuvring coefficients using experiments andviscous-flow calculationsrdquo in Proceedings of the 7th ICHDInternational Conference on Hydrodynamics (ICHD rsquo06) pp589ndash598 University of Naples ldquoFederico IIrdquo October 2006
[36] T-I Lee K-S Ahn H-S Lee and D-K Yum ldquoOn anempirical prediction of hydrodynamic coefficients for modernship hullsrdquo in Proceedings of the International Conference on
10 Mathematical Problems in Engineering
Marine Simulation and Ship Manoeuvrability (MARSIM rsquo03)Kanazawa Japan August 2003
[37] HNorrbinNils ldquoTheory and observations on the use of amath-ematical model for ship manoeuvring in deep and confinedwatersrdquo Report No SSPA-Pub-68 Swedish State ShipbuildingExperimental Tank Goteborg 1971
[38] R-C ZhuH-QGuo G-PMiao and J-W Yu ldquoComputationalmethod for evaluation of addedmass anddamping of ship basedon CFD theoryrdquo Journal of Shanghai Jiaotong University vol 43no 2 pp 198ndash203 2009
[39] J N NewmanMarine Hydrodynamics MIT Press CambridgeMass USA 1977
[40] M S Chislett and J Strom-Tejsen ldquoPlanar motion mechanismtests and full-scale steering and maneuvering predictions for aMariner class vesselrdquo International Shipbuilding Progress vol 12pp 201ndash224 1965
[41] M Z Fabrycy ldquoMulticollinearity caused by specificationerrorsrdquo Applied Statistics vol 24 no 2 pp 250ndash254 1975
[42] W L LuoOn themodeling of shipmanoeuvring by using supportvector machines [PhD thesis] Shanghai Jiao Tong UniversityShanghai China 2009
[43] S S Bowles and H M Levin ldquoMore on multicollinearity andthe effectiveness of schoolsrdquo The Journal of Human Resourcesvol 3 no 3 pp 393ndash400 1968
[44] I Jolliffe Principal Component Analysis John Wiley amp Sons2002
[45] SWold A Ruhe HWold andW J Dunn III ldquoThe collinearityproblem in linear regression The Partial Least Squares (PLS)approach to generalized inversesrdquo SIAM Journal on Scientificand Statistical Computing vol 5 no 3 pp 735ndash743 1984
[46] A G Ivakhnenko and J A Muller ldquoPresent state and newproblems of further GMDH developmentrdquo Systems AnalysisModeling Simulation vol 20 pp 3ndash16 1995
[47] H K Yoon and K P Rhee ldquoIdentification of hydrodynamiccoefficients in ship maneuvering equations of motion byEstimation-Before-Modeling techniquerdquo Ocean Engineeringvol 30 no 18 pp 2379ndash2404 2003
[48] S M Yeon D J Yeo and K P Rhee ldquoOptimal input designfor the identification of low-speed manoeuvring mathemati-cal modelrdquo in Proceedings of the International Conference onMarine Simulation and Ship Manoeuvrability (MARSIM rsquo06)Terschelling The Netherlands June 2006
[49] W Y HwangApplication of system identification to ship maneu-vering [PhD thesis] Massachusetts Institute of TechnologyCambridge Mass USA 1980
[50] K P Rhee and K Kim ldquoA new sea trial method for estimatinghydrodynamic derivativesrdquo Ship Ocean Technology vol 3 no 3pp 25ndash44 1999
[51] M Viviani R Depascale L Sebastiani C Podenzana Bon-vino R Dattola and M Soave ldquoAlternative methods forthe identification of hydrodynamic derivatives from standardmanoeuvresrdquo in Proceedings of the International Conference onMarine Simulation and Ship Manoeuvrability (MARSIM rsquo03)Kanazawa Japan August 2003
[52] W-L Luo and Z-J Zou ldquoElimination of simultaneous driftand sensitivity analysis in the hydrodynamic modeling of shipmanoeuvringrdquo Journal of Shanghai Jiaotong University vol 42no 8 pp 1358ndash1362 2008
[53] R R Shenoi P Krishnankutty and R P Selvam ldquoSensitivitystudy of hydrodynamic derivative variations on the maneu-verability prediction of a container shiprdquo in Proceedings of the
ASME 34th International Conference on Ocean Offshore andArctic Engineering (OMAE rsquo15) American Society ofMechanicalEngineers June 2015
[54] W L Luo and Z J Zou ldquoAnalysis of captive model obliquetowing test by using least squares support vector machinesrdquoShipbuilding of China vol 51 no 2 pp 10ndash14 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
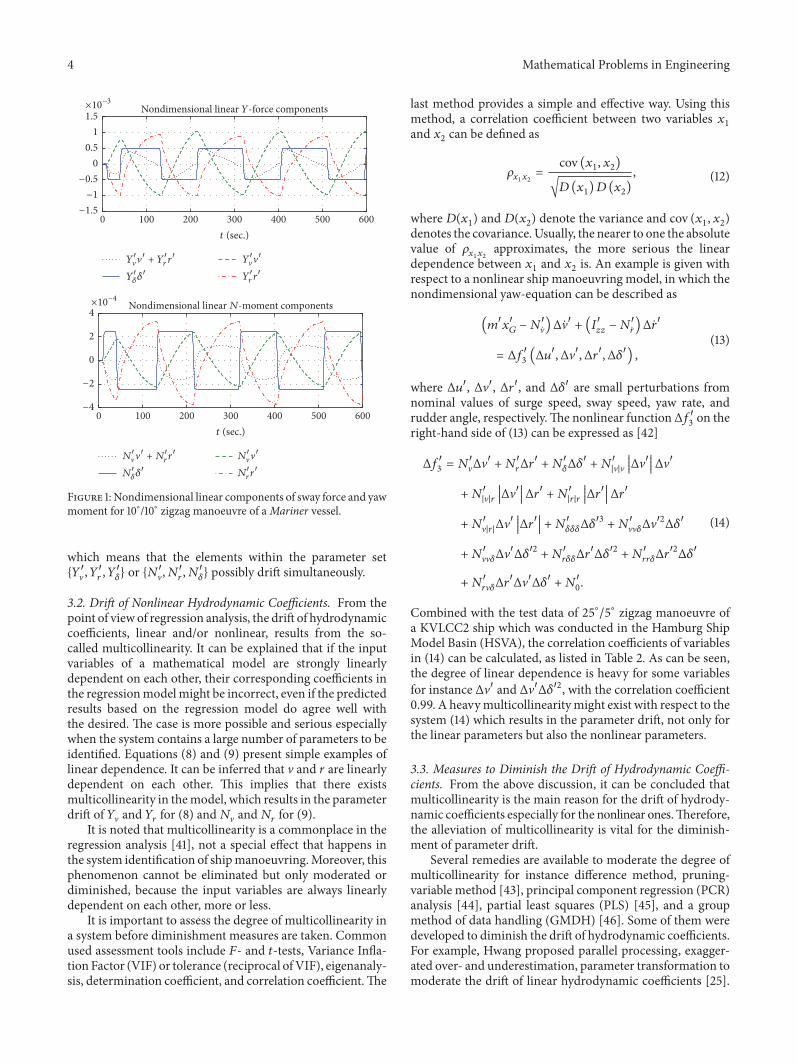
4 Mathematical Problems in Engineering
Nondimensional linear Y-force componentstimes10minus3
100 200 300 400 500 6000t (sec)
minus15
minus1
minus05
0
05
1
15
Nondimensional linear N-moment components
N998400
998400+ N
998400
rr998400
N998400
120575120575998400
N998400
998400
N998400
rr998400
times10minus4
100 200 300 400 500 6000t (sec)
minus4
minus2
0
2
4
Y998400
998400+ Y
998400
rr998400
Y998400
120575120575998400
Y998400
998400
Y998400
rr998400
Figure 1 Nondimensional linear components of sway force and yawmoment for 10∘10∘ zigzag manoeuvre of aMariner vessel
which means that the elements within the parameter set1198841015840V 1198841015840119903 1198841015840120575 or 1198731015840V 1198731015840119903 1198731015840120575 possibly drift simultaneously
32 Drift of Nonlinear Hydrodynamic Coefficients From thepoint of view of regression analysis the drift of hydrodynamiccoefficients linear andor nonlinear results from the so-called multicollinearity It can be explained that if the inputvariables of a mathematical model are strongly linearlydependent on each other their corresponding coefficients inthe regressionmodelmight be incorrect even if the predictedresults based on the regression model do agree well withthe desired The case is more possible and serious especiallywhen the system contains a large number of parameters to beidentified Equations (8) and (9) present simple examples oflinear dependence It can be inferred that V and 119903 are linearlydependent on each other This implies that there existsmulticollinearity in themodel which results in the parameterdrift of 119884V and 119884119903 for (8) and 119873V and 119873119903 for (9)
It is noted that multicollinearity is a commonplace in theregression analysis [41] not a special effect that happens inthe system identification of shipmanoeuvringMoreover thisphenomenon cannot be eliminated but only moderated ordiminished because the input variables are always linearlydependent on each other more or less
It is important to assess the degree of multicollinearity ina system before diminishment measures are taken Commonused assessment tools include 119865- and 119905-tests Variance Infla-tion Factor (VIF) or tolerance (reciprocal ofVIF) eigenanaly-sis determination coefficient and correlation coefficientThe
last method provides a simple and effective way Using thismethod a correlation coefficient between two variables 1199091and 1199092 can be defined as
12058811990911199092
= cov (1199091 1199092)radic119863 (1199091)119863 (1199092)
(12)
where 119863(1199091) and 119863(1199092) denote the variance and cov (1199091 1199092)denotes the covariance Usually the nearer to one the absolutevalue of 120588119909
11199092
approximates the more serious the lineardependence between 1199091 and 1199092 is An example is given withrespect to a nonlinear ship manoeuvring model in which thenondimensional yaw-equation can be described as
(11989810158401199091015840119866 minus 1198731015840V) ΔV1015840 + (1198681015840119911119911 minus 1198731015840119903) Δ 1199031015840= Δ11989110158403 (Δ1199061015840 ΔV1015840 Δ1199031015840 Δ1205751015840) (13)
where Δ1199061015840 ΔV1015840 Δ1199031015840 and Δ1205751015840 are small perturbations fromnominal values of surge speed sway speed yaw rate andrudder angle respectivelyThe nonlinear functionΔ11989110158403 on theright-hand side of (13) can be expressed as [42]
Δ11989110158403 = 1198731015840VΔV1015840 + 1198731015840119903Δ1199031015840 + 1198731015840120575Δ1205751015840 + 1198731015840|V|V 10038161003816100381610038161003816ΔV101584010038161003816100381610038161003816 ΔV1015840+ 1198731015840|V|119903 10038161003816100381610038161003816ΔV101584010038161003816100381610038161003816 Δ1199031015840 + 1198731015840|119903|119903 10038161003816100381610038161003816Δ119903101584010038161003816100381610038161003816 Δ1199031015840+ 1198731015840V|119903|ΔV1015840 10038161003816100381610038161003816Δ119903101584010038161003816100381610038161003816 + 1198731015840120575120575120575Δ12057510158403 + 1198731015840VV120575ΔV10158402Δ1205751015840+ 1198731015840VV120575ΔV1015840Δ12057510158402 + 1198731015840119903120575120575Δ1199031015840Δ12057510158402 + 1198731015840119903119903120575Δ11990310158402Δ1205751015840+ 1198731015840119903V120575Δ1199031015840ΔV1015840Δ1205751015840 + 11987310158400
(14)
Combined with the test data of 25∘5∘ zigzag manoeuvre ofa KVLCC2 ship which was conducted in the Hamburg ShipModel Basin (HSVA) the correlation coefficients of variablesin (14) can be calculated as listed in Table 2 As can be seenthe degree of linear dependence is heavy for some variablesfor instance ΔV1015840 and ΔV1015840Δ12057510158402 with the correlation coefficient099 A heavymulticollinearitymight exist with respect to thesystem (14) which results in the parameter drift not only forthe linear parameters but also the nonlinear parameters
33 Measures to Diminish the Drift of Hydrodynamic Coeffi-cients From the above discussion it can be concluded thatmulticollinearity is the main reason for the drift of hydrody-namic coefficients especially for the nonlinear onesThereforethe alleviation of multicollinearity is vital for the diminish-ment of parameter drift
Several remedies are available to moderate the degree ofmulticollinearity for instance difference method pruning-variable method [43] principal component regression (PCR)analysis [44] partial least squares (PLS) [45] and a groupmethod of data handling (GMDH) [46] Some of them weredeveloped to diminish the drift of hydrodynamic coefficientsFor example Hwang proposed parallel processing exagger-ated over- and underestimation parameter transformation tomoderate the drift of linear hydrodynamic coefficients [25]
Mathematical Problems in Engineering 5
Table 2 Matrix of correlation coefficients
1198731015840V 1198731015840119903 1198731015840|V|V 1198731015840|V|119903 1198731015840120575 1198731015840120575120575120575 1198731015840V120575120575 1198731015840VV120575 1198731015840|119903|119903 1198731015840V|119903| 1198731015840119903120575120575 1198731015840119903119903120575 1198731015840119903V1205751198731015840V 100 045 098 067 091 092 099 097 039 084 054 054 0681198731015840119903 100 042 084 053 054 047 043 097 066 091 075 0811198731015840|V|V 100 066 083 085 098 100 032 077 050 042 0671198731015840|V|119903 100 062 064 068 066 075 087 092 073 1001198731015840120575 100 099 091 083 050 083 061 071 0621198731015840120575120575120575 100 092 085 050 083 062 069 0641198731015840V120575120575 100 098 040 083 055 053 0691198731015840VV120575 100 033 077 050 042 0671198731015840|119903|119903 100 062 086 081 0721198731015840V|119903| 100 078 082 0891198731015840119903120575120575 100 083 0911198731015840119903119903120575 100 0731198731015840119903V120575 100
For nonlinear hydrodynamic coefficients ridge regressionand modification of input scenario were proposed [47 48]However for given samples from real manoeuvring testssuch a modification of excitation might be not applicable inother words this approach might only work for simulationdata
Since the multicollinearity is an inherent characteristicof a regression model besides the regression tool (eg LSand EKF) modification of the model is a direct and effectiveway to alleviate the multicollinearity which can be achievedby altering the structure of the model and reconstructing theinput variables in the model with the aim to decrease thelinear dependence of variables Based on these ideas threeapproaches are presented to diminish the drift of hydrody-namic coefficients including simplification of the manoeu-vring model difference of the samples and the method ofadditional signal Studies are performed mainly combinedwith the Abkowitz model
331 Simplification of the Manoeuvring Model Although theAbkowitz model is often preferred in the prediction of shipmanoeuvring such a ldquolargerdquo parametric system makes itinconvenient to use in practice Actually some nonlinearderivatives are difficult to be determined although they couldbe unimportant In practical application of the Abkowitzmodel simplification had been performed to improve thefeasibility of this model Examples are the work by Abkowitz[11] and Norrbin Nils [37] Physical meanings were the mainconcern in the simplification The simplification can also beperformed from the point of view of regression analysis [24]Taking the yaw-equation (13) as an example the originalexpression of (14) is
Δ11989110158403 = 11987310158400119906Δ1199061015840 + 11987310158400119906119906Δ11990610158402 + 1198731015840VΔV1015840 + 1198731015840119903Δ1199031015840+ 1198731015840120575Δ1205751015840 + 1198731015840VVVΔV10158403 + 1198731015840120575120575120575Δ12057510158403+ 1198731015840VV119903ΔV10158402Δ1199031015840 + 1198731015840VV120575ΔV10158402Δ1205751015840 + 1198731015840V120575120575ΔV1015840Δ12057510158402
+ 1198731015840120575119906Δ1205751015840Δ1199061015840 + 1198731015840V119906ΔV1015840Δ1199061015840 + 1198731015840119903119906Δ1199031015840Δ1199061015840+ 1198731015840120575119906119906Δ1205751015840Δ11990610158402 + 1198731015840119903119903119903Δ11990310158403 + 1198731015840V119903119903ΔV1015840Δ11990310158402+ 1198731015840V119906119906ΔV1015840Δ11990610158402 + 1198731015840119903119906119906Δ1199031015840Δ11990610158402 + 1198731015840119903120575120575Δ1199031015840Δ12057510158402+ 1198731015840119903119903120575Δ11990310158402Δ1205751015840 + 1198731015840119903V120575Δ1199031015840ΔV1015840Δ1205751015840 + 11987310158400
(15)
in which 22 hydrodynamic coefficients are contained [40]To simplify it all the nonlinear terms related to the surgeperturbation Δ1199061015840 are eliminated for two reasons First sincethe ship total velocity 119880(119905) is taken as the nondimensionalfactor the effect of velocity loss has been taken into account inevery velocity term Second the linear dependence betweenthe linear and nonlinear terms relating to Δ1199061015840 is significantwhichwill result in the parameter drift For example the thirdand twelfth terms on the right hand side of (15) at the 119896thsampling time can be written as
1198731015840VΔV (119896) 119880 (119896) + 1198731015840V119906ΔV (119896) Δ119906 (119896) (16)
by considering the prime nondimensional definition
Δ1199061015840 = Δ119906119880
Δ1015840 = Δ(1198802119871)
(17)
For moderate manoeuvres it holds that
119880 (119896) asymp 1199060 + Δ119906 (119896) (18)
The expression (16) can be written as
1198731015840VΔV (119896) 1199060 + 1198731015840VΔV (119896) Δ119906 (119896) + 1198731015840V119906ΔV (119896) Δ119906 (119896) (19)
Obviously the second term is linearly dependent on thethird term In consideration of the significance of the linearderivative1198731015840V the nonlinear term1198731015840V119906ΔV(119896)Δ119906(119896) is removed
6 Mathematical Problems in Engineering
In the same way the other six terms related to the derivatives11987310158400119906119906 1198731015840120575119906 1198731015840119903119906 1198731015840120575119906119906 1198731015840V119906119906 and 1198731015840119903119906119906 can be removed from(15) Ignoring the effect of surge speed 119906 on the change of yawmoment 11987310158400119906Δ1199061015840 can be removed furthermore Finally byintroducing the cross flow models to replace the third-ordernonlinear terms model (15) is simplified to model (14) withthe number of hydrodynamic coefficients decreasing from 22to 14
Sensitivity analysis provides another way to simplify themathematical model of ship manoeuvring [49ndash53] Usingthis method the effect of the hydrodynamic coefficient onthe prediction of ship manoeuvring is studied by observingthe change of manoeuvring (eg velocity angular velocityadvance transfer overshoots and tactical diameter) to thechange of hydrodynamic coefficients Based on the results ofsensitivity analysis some trivial hydrodynamic coefficientsare removed from the mathematical model The main diffi-culties with this method are the determination of two factors(i) the criteria of importance for a hydrodynamic coefficientwhich decides this coefficient will be retained or removedfrom the model (ii) the reference value of a hydrodynamiccoefficient when the real experimental data are used foridentification instead of the simulation data
332 Difference Method Besides simplification of the math-ematical model of ship manoeuvring reconstruction of theinput variables or samples provides another effective way toalleviate the parameter drift It is noted that such a recon-struction does not require a new manoeuvring to obtain newinput-output samples for system identification butmodify theobtained samples Difference method provides a simple wayto reconstruct the samples [24]
Taking (13) as an example the following discrete equationcan be obtained
Δ119903 (119896 + 1) = Δ119903 (119896) + 1205791ΔV (119896) 119880 (119896) + 1205792Δ119903 (119896)119880 (119896)+ 1205793Δ120575 (119896)1198802 (119896) + 1205794 |ΔV (119896)| ΔV (119896)+ 1205795 |ΔV (119896)| Δ119903 (119896) + 1205796 |Δ119903 (119896)| Δ119903 (119896)+ 1205797ΔV (119896) |Δ119903 (119896)| + 1205798Δ1205753 (119896)1198802 (119896)+ 1205799ΔV2 (119896) Δ120575 (119896)+ 12057910ΔV (119896) Δ1205752 (119896) 119880 (119896)+ 12057911Δ119903 (119896) Δ1205752 (119896) 119880 (119896)+ 12057912Δ1199032 (119896) Δ120575 (119896)+ 12057913Δ119903 (119896) ΔV (119896) Δ120575 (119896) + 120579141198802 (119896)
(20)
where 1205791sim14 are the linear combinations of the hydrodynamiccoefficients with respect to the sway and yaw motion [23]Define vectorsΘ = [1205791 1205792 12057914]14times1 X (119896) = [ΔV (119896) 119880 (119896) Δ119903 (119896)119880 (119896) Δ120575 (119896)
sdot 1198802 (119896) |ΔV (119896)| ΔV (119896) |ΔV (119896)| Δ119903 (119896) |Δ119903 (119896)|
sdot Δ119903 (119896) ΔV (119896) |Δ119903 (119896)| Δ1205753 (119896) 1198802 (119896) ΔV2 (119896)sdot Δ120575 (119896) ΔV (119896) Δ1205752 (119896)119880 (119896) Δ119903 (119896) Δ1205752 (119896)sdot 119880 (119896) Δ1199032 (119896) Δ120575 (119896) Δ119903 (119896) ΔV (119896)sdot Δ120575 (119896) 1198802 (119896)]119879
14times1
(21)
Equation (20) can be rewritten as
Δ119903 (119896 + 1) = Δ119903 (119896) +ΘX (119896) (22)
At a neighbour sampling time the above equation becomes
Δ119903 (119896) = Δ119903 (119896 minus 1) +ΘX (119896 minus 1) (23)
Combined with (22) the following equality holds
119911 (119896) = 119911 (119896 minus 1) +ΘY (119896 minus 1) (24)
by definition of
119911 (119896) = Δ119903 (119896 + 1) minus Δ119903 (119896) Y (119896 minus 1) = X (119896) minus X (119896 minus 1) (25)
Comparing (23) with (24) it can be seen that although theinput-output pair are altered the coefficient matrix remainsthe same Usually if the degree of linear dependence of inputvariables in the original system is serious it could be mod-erated after difference of samples As a comparison Table 3lists the correlation coefficients after the difference method isemployed as shown below the principal diagonal (elementsabove the principal diagonal are the correlation coefficientswithout difference method shown in Table 2) As can beseen the linear dependence of the input variables has beenobviously decreased
333 Additional Signal Besides the difference methodanother approach to reconstruct the input-output samplescan be used which refers to the method of additional signalSuch a method had been successfully applied to the identifi-cation of shipmanoeuvring by analyzing simulation data [23]and captive model test results [54] Taking the system (22) asan example an additional ramp signal can be designed as
119910119886 (119896 + 1) = 119910119886 (119896) + 120582 (26)
where 120582 is a constant Adding this signal to (22) a newparameter system can be obtained as
[Δ119903 (119896 + 1) + 119910119886 (119896 + 1)]= [Δ119903 (119896) + 119910a (119896)] +ΘX (119896) + 120582 (27)
where the output variable and the first input variable changehowever the parameter matrix Θ related to hydrodynamiccoefficients does not The additional signal can be viewed asan additional excitation to the original system As a result themanoeuvring characteristics of the original system which
Mathematical Problems in Engineering 7
Table 3 Comparison of correlation coefficients using difference method
1198731015840V 1198731015840119903 1198731015840|V|V 1198731015840|V|119903 1198731015840120575 1198731015840120575120575120575 1198731015840V120575120575 1198731015840VV120575 1198731015840|119903|119903 1198731015840V|119903| 1198731015840119903120575120575 1198731015840119903119903120575 1198731015840119903V1205751198731015840V 100 045 098 067 091 092 099 097 039 084 054 054 0681198731015840119903 044 100 042 084 053 054 047 043 097 066 091 075 0811198731015840|V|V 083 031 100 066 083 085 098 100 032 077 050 042 0671198731015840|V|119903 034 021 038 100 062 064 068 066 075 087 092 073 1001198731015840120575 064 044 023 001 100 099 091 083 050 083 061 071 0621198731015840120575120575120575 050 033 025 013 074 100 092 085 050 083 062 069 0641198731015840V120575120575 084 041 077 036 048 066 100 098 040 083 055 053 0691198731015840VV120575 081 031 099 039 022 029 082 100 033 077 050 042 0671198731015840|119903|119903 034 088 003 007 054 035 028 004 100 062 086 081 0721198731015840V|119903| 057 027 021 046 058 041 040 019 030 100 078 082 0891198731015840119903120575120575 019 017 008 058 021 029 009 006 005 030 100 083 0911198731015840119903119903120575 029 032 015 016 072 044 009 018 049 062 050 100 0731198731015840119903V120575 032 011 033 090 001 009 026 032 016 049 073 024 100
Table 4 Comparison of correlation coefficients using additionalsignal
1198731 119873101584011198731015840V 0465 00811198731015840119903 0996 00111198731015840|V|V 0450 00261198731015840|V|119903 0849 00021198731015840120575 0552 00281198731015840120575120575120575 0556 00221198731015840V120575120575 0491 00051198731015840VV120575 0455 00291198731015840|119903|119903 0023 08341198731015840V|119903| 0970 00391198731015840119903120575120575 0665 00151198731015840119903119903120575 0912 00131198731015840119903V120575 0771 0024
might cause the parameter drift as described in the Sec-tion 31 are changed and the parameter drift can be alleviatedresultantly From the point of view of regression analysis theintroduction of the additional signal alters the input variableswhich might alleviate the degree of linear dependencebetween the changed variables and others Takingmodel (27)as an example assuming 120582 = 1 Table 4 lists the correlationcoefficients before and after the additional signal is attachedto the samples in which 1198731 = 11987310158401 = 1 indicates that coeffi-cient of the first input variable [Δ119903(119896)+119910119886(119896)] in (27) is one Ascan be seen from the comparison results the degree of lineardependence remarkably decreases for most of variables afteran additional signal is added
It is noted that the design of additional signal dependson the characteristic of the data samples or the manoeuvringmotion For periodically nonlinear motion such as zigzagmanoeuvre or turning circle manoeuvring the linear rampsignal like (26) works well [23] for a linear motion such asoblique towing test a nonlinear additional signal is moreappropriate [54]
Table 5 Hydrodynamic coefficients of KVLCC2 (times10minus5)Value X-coef Value Y-coef Value N-coef Value
1198831015840 minus954 1198831015840119906 minus93 1198841015840V minus358 1198731015840V minus631198841015840V minus1283 1198831015840VV 149 1198841015840119903 1980 1198731015840119903 minus741198841015840119903 0 1198831015840119903119903 minus108 1198841015840120575 448 1198731015840120575 minus1651198731015840V 0 1198831015840120575120575 minus105 1198841015840|V|V minus35 1198731015840|V|V 201198731015840119903 minus107 1198831015840V119903 minus237 1198841015840|V|119903 30 1198731015840|V|119903 minus991199091015840119866 3486 1198831015840V120575 172 1198841015840|119903|119903 679 1198731015840|119903|119903 minus171198981015840 1908 1198831015840119903120575 minus433 1198841015840V|119903| 158 1198731015840V|119903| minus431198681015840119911 119 11988310158400 minus48 1198841015840120575120575120575 minus94 1198731015840120575120575120575 22
1198841015840V120575120575 minus36 1198731015840V120575120575 171198841015840VV120575 minus73 1198731015840VV120575 121198841015840119903120575120575 minus23 1198731015840119903120575120575 221198841015840119903119903120575 134 1198731015840119903119903120575 minus401198841015840119903V120575 minus28 1198731015840119903V120575 3911988410158400 minus66 11987310158400 02
4 Example Study
The abovementioned measures on how to diminish the driftof hydrodynamic coefficients including difference methodand additional signal are employed in identifying a simplifiedAbkowitz model combined with free-running model tests ofaKVLCC2 SVMbased SI is used to obtain the hydrodynamiccoefficients The details of the mathematical model of shipmanoeuvring the SVM methodology the ship and themodel tests can be found in [24] and relevant literatureTable 5 lists the identification results of the hydrodynamiccoefficients in which the addedmasses and addedmoment ofinertia are calculated by slender-body theory as stated in Sec-tion 2 Based on the regression model 25∘5∘ zigzag manoeu-vring motion is simulated and the predicted results arecomparedwith the experimental results as shown in Figure 2Comparisons with the experimental results of other twomanoeuvres are presented in Figure 3 (20∘5∘ zigzagmanoeu-vre) and Figure 4 (20∘10∘ zigzag manoeuvre) respectivelyAs can be seen good agreement between prediction and
8 Mathematical Problems in Engineering
PredictionsExperiments
20 40 60 80 100 1200
20 40 60 80 100 1200
20 40 60 80 100 1200
20 40 60 80 100 1200Time (s)
minus500
50
051
15
u(m
s)
minus050
05
(m
s)
r(∘
s)
minus505
Heading (∘) and rudder angle (∘)
Figure 2 Prediction of 25∘5∘ zigzag manoeuvre of a KCLCC2 ship
PredictionsExperiments
05
1
15
u(m
s)
20 40 60 80 100 120 140 1600minus05
0
05
(m
s)
r(∘
s)
minus5
05
minus50
050
Heading (∘) and rudder angle (∘s)
20 40 60 80 100 120 140 1600
20 40 60 80 100 120 140 1600
20 40 60 80 100 120 140 1600Time (s)
Figure 3 Prediction of 20∘5∘ zigzag manoeuvre of a KCLCC2 ship
experiment is achieved It is owing not only to the use of SVMmethod a powerful modeling tool but also to the measurestaken to diminish the parameter drift
5 Conclusions
Parameter identifiability is an important issue for the SI appli-cation to the modeling of ship manoeuvring Some parame-ters in the manoeuvring model cannot be obtained using SIwhile some parameters deviate from true values even if theycan be derived Several measures are proposed to deal withthe problem of parameter identifiability and the validitiesare demonstrated by examples To determine the addedmasses and added moment of inertia slender-body theoryprovides a simple estimationmethod Todiminish the param-eter drift effect the mathematical model of ship manoeu-vring motion is simplified on the basis of regression analysis
PredictionsExperiments
r(∘
s)
Heading (∘) and rudder angle (∘s)
minus50
050
05
1
15
u(m
s)
minus05
0
05
(m
s)
minus5
05
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800Time (s)
Figure 4 Prediction of 20∘10∘ zigzagmanoeuvre of aKCLCC2 ship
difference of the samples and additional signal also take effectThese measures can be viewed as developed approaches thatare commonly used in regression analysis to diminish themulticollinearity For instance the simplification of a modelcan be viewed as a kind of pruning-variable method or PCRanalysis since the main components in the model remainedwhile some trivial variables are removed The additionalsignal method can be viewed as the opposition to pruning-variable method
Future work will be devoted to the study on a more accu-rate practical and universal estimation method for addedmasses and added moment of inertia since slender-bodymethod gives satisfactory results only for slender ships andldquomildrdquo manoeuvres Moreover how to design an appropriateadditional signal according to the characteristics of sampleswill be studied
Competing Interests
The author declares that they have no competing interests
Acknowledgments
This work was partially supported by the Special Item forUniversity in Fujian Province supported by the EducationDepartment (no JK15003) and the Special Item supportedby the Fujian Provincial Department of Ocean and Fisheries(no MHGX-16) The author is grateful to the Hamburg ShipModel Basin (HSVA) for providing the experimental data
References
[1] International Maritime Organization (IMO) ldquoStandards forship manoeuvrabilityrdquo Resolution MSC 137(76) 2002
Mathematical Problems in Engineering 9
[2] The Maneuvering Committee of ITTC ldquoFinal report andrecommendations to the 25th ITTCrdquo in Proceedings of the 25thInternational Towing Tank Conference pp 143ndash208 FukuokaJapan 2008
[3] G Rajesh and S K Bhattacharyya ldquoSystem identification fornonlinear maneuvering of large tankers using artificial neuralnetworkrdquo Applied Ocean Research vol 30 no 4 pp 256ndash2632008
[4] L Moreira and C Guedes Soares ldquoRecursive neural networkmodel of catamaran manoeuvringrdquo International Journal ofMaritime Engineering vol 154 pp A121ndashA130 2012
[5] W L Luo and Z J Zou ldquoBlind prediction of ship manoeuvringby using Support Vector Machinesrdquo in Proceedings of the the29th International Conference on Offshore Mechanics and ArcticEngineering (OMAE rsquo10) Shanghai China June 2010
[6] W Luo L Moreira and C Guedes Soares ldquoManoeuvringsimulation of catamaran by using implicit models based onsupport vector machinesrdquo Ocean Engineering vol 82 pp 150ndash159 2014
[7] T Holzhuter ldquoRobust identification in an adaptive track con-troller for shipsrdquo in Proceedings of the 3rd IFAC Symposium onAdaptive Systems in Control and Signal Processing pp 275ndash280Glasgow UK 1989
[8] R Munoz-Mansilla J Aranda J M Dıaz and J de la CruzldquoParametricmodel identification of high-speed craft dynamicsrdquoOcean Engineering vol 36 no 12-13 pp 1025ndash1038 2009
[9] M N Hayes Parameters identification of nonlinear stochasticsystems applied to ocean vehicle dynamics [PhD thesis] Mas-sachusetts Institute of Technology CambridgeMassUSA 1971
[10] J Van Amerongen ldquoAdaptive steering of ships-a model refer-ence approachrdquo Automatica vol 20 no 1 pp 3ndash14 1984
[11] M A Abkowitz ldquoMeasurement of hydrodynamic characteristicfrom shipmaneuvering trials by system identificationrdquoTransac-tions of Society of Naval Architects andMarine Engineers vol 88pp 283ndash318 1981
[12] L P Perera P Oliveira and C Guedes Soares ldquoSystemidentification of nonlinear vessel steeringrdquo Journal of OffshoreMechanics and Arctic Engineering vol 137 no 3 Article ID031302 pp 1ndash7 2015
[13] K J Astrom ldquoMaximum likelihood and prediction errormethodsrdquo Automatica vol 16 no 5 pp 551ndash574 1980
[14] C G Kallstrom and K J Astrom ldquoExperiences of systemidentification applied to ship steeringrdquo Automatica vol 17 no1 pp 187ndash198 1981
[15] W-W Zhou and M Blanke ldquoIdentification of a class ofnonlinear state-space models using RPE techniquesrdquo IEEETransactions on Automatic Control vol 34 no 3 pp 312ndash3161989
[16] E Revestido Herrero and F J Velasco Gonzalez ldquoTwo-stepidentification of non-linear manoeuvring models of marinevesselsrdquo Ocean Engineering vol 53 pp 72ndash82 2012
[17] R P Selvam S K Bhattacharyya andMHaddara ldquoA frequencydomain system identificationmethod for linear shipmaneuver-ingrdquo International Shipbuilding Progress vol 52 no 1 pp 5ndash272005
[18] S K Bhattacharyya andM R Haddara ldquoParametric identifica-tion for nonlinear ship maneuveringrdquo Journal of Ship Researchvol 50 no 3 pp 197ndash207 2006
[19] Y Chen Y Song and M Chen ldquoParameters identificationfor ship motion model based on particle swarm optimizationrdquoKybernetes vol 39 no 6 pp 871ndash880 2010
[20] Y T Dai L Q Liu and S S Feng ldquoOn the identification of cou-pled pitch and heave motions using opposition-based particleswarm optimizationrdquo Mathematical Problems in Engineeringvol 2014 Article ID 784049 10 pages 2014
[21] K-P Rhee S-Y Lee and Y-J Sung ldquoEstimation of manoeu-vring coefficients from PMM test by genetic algorithmrdquo inProceedings of the International Symposium and Workshop onForce Acting on aManoeuvringVessel Val de Reuil France 1998
[22] S Sutulo and C Guedes Soares ldquoAn algorithm for offlineidentification of ship manoeuvring mathematical models fromfree-running testsrdquo Ocean Engineering vol 79 pp 10ndash25 2014
[23] W L Luo and Z J Zou ldquoParametric identification of shipmaneuvering models by using support vector machinesrdquo Jour-nal of Ship Research vol 53 no 1 pp 19ndash30 2009
[24] W L Luo C Guedes Soares and Z J Zou ldquoParameteridentification of ship maneuvering model based on supportvector machines and particle swarm optimizationrdquo Journalof Offshore Mechanics and Arctic Engineering vol 138 no 3Article ID 031101 8 pages 2016
[25] W Y Hwang ldquoCancellation effect and parameter identifiabilityof ship steering dynamicsrdquo International Shipbuilding Progressvol 29 no 332 pp 90ndash120 1982
[26] C G Kallstrom ldquoIdentification and adaptive control applied toship steeringrdquo Tech Rep SSPAPUB-93 1982
[27] H D Nguyen ldquoRecursive identification of ship maneuveringdynamics and hydrodynamicsrdquo in Proceedings of the 36thEMAC Annual Conference pp C717ndashC732 Reykjavik Iceland2007
[28] F J Velasco I Zamanillo E Lopez and E Moyano ldquoParameterestimation of ship linear maneuvering modelsrdquo in Proceedingsof the OCEANS 2011 IEEE Santander Conference pp 1ndash8Santander Spain June 2011
[29] M R Haddara and Y Wang ldquoParametric identification ofmanoeuvring models for shipsrdquo International ShipbuildingProgress vol 46 no 445 pp 5ndash27 1999
[30] D Hess W Faller J Lee T Fu and E Ammeen ldquoShip maneu-vering simulation in wind and waves a nonlinear time-domainapproach using recursive neural networksrdquo in Proceedings of the26th Symposium on Naval Hydrodynamics Rome Italy 2006
[31] D Hess W Faller and J Lee ldquoReal-time nonlinear simulationof maneuvers for US navy combatant DTMB 5415rdquo in Pro-ceedings of the Workshop on Verification and Validation of ShipManeuvering Simulation Methods (SIMMAN rsquo08) pp E15ndashE21Copenhagen Denmark 2008
[32] M A Abkowitz ldquoLectures on ship hydrodynamicsmdashsteeringand manoeuvrabilityrdquo Tech Rep Hy-5 Hydro- and Aerody-namics Laboratory Lyngby Denmark 1964
[33] A Ogawa and H Kasai ldquoOn the mathematical model ofmanoeuvring motion of shipsrdquo International ShipbuildingProgress vol 25 no 292 pp 306ndash319 1978
[34] K Nomoto T Tagushi K Honda and S Hirano ldquoOn steeringqualities of shipsrdquo International Shipbuilding Progress vol 4 no35 pp 354ndash370 1957
[35] S Toxopeus ldquoValidation of slender-bodymethod for predictionof linear manoeuvring coefficients using experiments andviscous-flow calculationsrdquo in Proceedings of the 7th ICHDInternational Conference on Hydrodynamics (ICHD rsquo06) pp589ndash598 University of Naples ldquoFederico IIrdquo October 2006
[36] T-I Lee K-S Ahn H-S Lee and D-K Yum ldquoOn anempirical prediction of hydrodynamic coefficients for modernship hullsrdquo in Proceedings of the International Conference on
10 Mathematical Problems in Engineering
Marine Simulation and Ship Manoeuvrability (MARSIM rsquo03)Kanazawa Japan August 2003
[37] HNorrbinNils ldquoTheory and observations on the use of amath-ematical model for ship manoeuvring in deep and confinedwatersrdquo Report No SSPA-Pub-68 Swedish State ShipbuildingExperimental Tank Goteborg 1971
[38] R-C ZhuH-QGuo G-PMiao and J-W Yu ldquoComputationalmethod for evaluation of addedmass anddamping of ship basedon CFD theoryrdquo Journal of Shanghai Jiaotong University vol 43no 2 pp 198ndash203 2009
[39] J N NewmanMarine Hydrodynamics MIT Press CambridgeMass USA 1977
[40] M S Chislett and J Strom-Tejsen ldquoPlanar motion mechanismtests and full-scale steering and maneuvering predictions for aMariner class vesselrdquo International Shipbuilding Progress vol 12pp 201ndash224 1965
[41] M Z Fabrycy ldquoMulticollinearity caused by specificationerrorsrdquo Applied Statistics vol 24 no 2 pp 250ndash254 1975
[42] W L LuoOn themodeling of shipmanoeuvring by using supportvector machines [PhD thesis] Shanghai Jiao Tong UniversityShanghai China 2009
[43] S S Bowles and H M Levin ldquoMore on multicollinearity andthe effectiveness of schoolsrdquo The Journal of Human Resourcesvol 3 no 3 pp 393ndash400 1968
[44] I Jolliffe Principal Component Analysis John Wiley amp Sons2002
[45] SWold A Ruhe HWold andW J Dunn III ldquoThe collinearityproblem in linear regression The Partial Least Squares (PLS)approach to generalized inversesrdquo SIAM Journal on Scientificand Statistical Computing vol 5 no 3 pp 735ndash743 1984
[46] A G Ivakhnenko and J A Muller ldquoPresent state and newproblems of further GMDH developmentrdquo Systems AnalysisModeling Simulation vol 20 pp 3ndash16 1995
[47] H K Yoon and K P Rhee ldquoIdentification of hydrodynamiccoefficients in ship maneuvering equations of motion byEstimation-Before-Modeling techniquerdquo Ocean Engineeringvol 30 no 18 pp 2379ndash2404 2003
[48] S M Yeon D J Yeo and K P Rhee ldquoOptimal input designfor the identification of low-speed manoeuvring mathemati-cal modelrdquo in Proceedings of the International Conference onMarine Simulation and Ship Manoeuvrability (MARSIM rsquo06)Terschelling The Netherlands June 2006
[49] W Y HwangApplication of system identification to ship maneu-vering [PhD thesis] Massachusetts Institute of TechnologyCambridge Mass USA 1980
[50] K P Rhee and K Kim ldquoA new sea trial method for estimatinghydrodynamic derivativesrdquo Ship Ocean Technology vol 3 no 3pp 25ndash44 1999
[51] M Viviani R Depascale L Sebastiani C Podenzana Bon-vino R Dattola and M Soave ldquoAlternative methods forthe identification of hydrodynamic derivatives from standardmanoeuvresrdquo in Proceedings of the International Conference onMarine Simulation and Ship Manoeuvrability (MARSIM rsquo03)Kanazawa Japan August 2003
[52] W-L Luo and Z-J Zou ldquoElimination of simultaneous driftand sensitivity analysis in the hydrodynamic modeling of shipmanoeuvringrdquo Journal of Shanghai Jiaotong University vol 42no 8 pp 1358ndash1362 2008
[53] R R Shenoi P Krishnankutty and R P Selvam ldquoSensitivitystudy of hydrodynamic derivative variations on the maneu-verability prediction of a container shiprdquo in Proceedings of the
ASME 34th International Conference on Ocean Offshore andArctic Engineering (OMAE rsquo15) American Society ofMechanicalEngineers June 2015
[54] W L Luo and Z J Zou ldquoAnalysis of captive model obliquetowing test by using least squares support vector machinesrdquoShipbuilding of China vol 51 no 2 pp 10ndash14 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
Table 2 Matrix of correlation coefficients
1198731015840V 1198731015840119903 1198731015840|V|V 1198731015840|V|119903 1198731015840120575 1198731015840120575120575120575 1198731015840V120575120575 1198731015840VV120575 1198731015840|119903|119903 1198731015840V|119903| 1198731015840119903120575120575 1198731015840119903119903120575 1198731015840119903V1205751198731015840V 100 045 098 067 091 092 099 097 039 084 054 054 0681198731015840119903 100 042 084 053 054 047 043 097 066 091 075 0811198731015840|V|V 100 066 083 085 098 100 032 077 050 042 0671198731015840|V|119903 100 062 064 068 066 075 087 092 073 1001198731015840120575 100 099 091 083 050 083 061 071 0621198731015840120575120575120575 100 092 085 050 083 062 069 0641198731015840V120575120575 100 098 040 083 055 053 0691198731015840VV120575 100 033 077 050 042 0671198731015840|119903|119903 100 062 086 081 0721198731015840V|119903| 100 078 082 0891198731015840119903120575120575 100 083 0911198731015840119903119903120575 100 0731198731015840119903V120575 100
For nonlinear hydrodynamic coefficients ridge regressionand modification of input scenario were proposed [47 48]However for given samples from real manoeuvring testssuch a modification of excitation might be not applicable inother words this approach might only work for simulationdata
Since the multicollinearity is an inherent characteristicof a regression model besides the regression tool (eg LSand EKF) modification of the model is a direct and effectiveway to alleviate the multicollinearity which can be achievedby altering the structure of the model and reconstructing theinput variables in the model with the aim to decrease thelinear dependence of variables Based on these ideas threeapproaches are presented to diminish the drift of hydrody-namic coefficients including simplification of the manoeu-vring model difference of the samples and the method ofadditional signal Studies are performed mainly combinedwith the Abkowitz model
331 Simplification of the Manoeuvring Model Although theAbkowitz model is often preferred in the prediction of shipmanoeuvring such a ldquolargerdquo parametric system makes itinconvenient to use in practice Actually some nonlinearderivatives are difficult to be determined although they couldbe unimportant In practical application of the Abkowitzmodel simplification had been performed to improve thefeasibility of this model Examples are the work by Abkowitz[11] and Norrbin Nils [37] Physical meanings were the mainconcern in the simplification The simplification can also beperformed from the point of view of regression analysis [24]Taking the yaw-equation (13) as an example the originalexpression of (14) is
Δ11989110158403 = 11987310158400119906Δ1199061015840 + 11987310158400119906119906Δ11990610158402 + 1198731015840VΔV1015840 + 1198731015840119903Δ1199031015840+ 1198731015840120575Δ1205751015840 + 1198731015840VVVΔV10158403 + 1198731015840120575120575120575Δ12057510158403+ 1198731015840VV119903ΔV10158402Δ1199031015840 + 1198731015840VV120575ΔV10158402Δ1205751015840 + 1198731015840V120575120575ΔV1015840Δ12057510158402
+ 1198731015840120575119906Δ1205751015840Δ1199061015840 + 1198731015840V119906ΔV1015840Δ1199061015840 + 1198731015840119903119906Δ1199031015840Δ1199061015840+ 1198731015840120575119906119906Δ1205751015840Δ11990610158402 + 1198731015840119903119903119903Δ11990310158403 + 1198731015840V119903119903ΔV1015840Δ11990310158402+ 1198731015840V119906119906ΔV1015840Δ11990610158402 + 1198731015840119903119906119906Δ1199031015840Δ11990610158402 + 1198731015840119903120575120575Δ1199031015840Δ12057510158402+ 1198731015840119903119903120575Δ11990310158402Δ1205751015840 + 1198731015840119903V120575Δ1199031015840ΔV1015840Δ1205751015840 + 11987310158400
(15)
in which 22 hydrodynamic coefficients are contained [40]To simplify it all the nonlinear terms related to the surgeperturbation Δ1199061015840 are eliminated for two reasons First sincethe ship total velocity 119880(119905) is taken as the nondimensionalfactor the effect of velocity loss has been taken into account inevery velocity term Second the linear dependence betweenthe linear and nonlinear terms relating to Δ1199061015840 is significantwhichwill result in the parameter drift For example the thirdand twelfth terms on the right hand side of (15) at the 119896thsampling time can be written as
1198731015840VΔV (119896) 119880 (119896) + 1198731015840V119906ΔV (119896) Δ119906 (119896) (16)
by considering the prime nondimensional definition
Δ1199061015840 = Δ119906119880
Δ1015840 = Δ(1198802119871)
(17)
For moderate manoeuvres it holds that
119880 (119896) asymp 1199060 + Δ119906 (119896) (18)
The expression (16) can be written as
1198731015840VΔV (119896) 1199060 + 1198731015840VΔV (119896) Δ119906 (119896) + 1198731015840V119906ΔV (119896) Δ119906 (119896) (19)
Obviously the second term is linearly dependent on thethird term In consideration of the significance of the linearderivative1198731015840V the nonlinear term1198731015840V119906ΔV(119896)Δ119906(119896) is removed
6 Mathematical Problems in Engineering
In the same way the other six terms related to the derivatives11987310158400119906119906 1198731015840120575119906 1198731015840119903119906 1198731015840120575119906119906 1198731015840V119906119906 and 1198731015840119903119906119906 can be removed from(15) Ignoring the effect of surge speed 119906 on the change of yawmoment 11987310158400119906Δ1199061015840 can be removed furthermore Finally byintroducing the cross flow models to replace the third-ordernonlinear terms model (15) is simplified to model (14) withthe number of hydrodynamic coefficients decreasing from 22to 14
Sensitivity analysis provides another way to simplify themathematical model of ship manoeuvring [49ndash53] Usingthis method the effect of the hydrodynamic coefficient onthe prediction of ship manoeuvring is studied by observingthe change of manoeuvring (eg velocity angular velocityadvance transfer overshoots and tactical diameter) to thechange of hydrodynamic coefficients Based on the results ofsensitivity analysis some trivial hydrodynamic coefficientsare removed from the mathematical model The main diffi-culties with this method are the determination of two factors(i) the criteria of importance for a hydrodynamic coefficientwhich decides this coefficient will be retained or removedfrom the model (ii) the reference value of a hydrodynamiccoefficient when the real experimental data are used foridentification instead of the simulation data
332 Difference Method Besides simplification of the math-ematical model of ship manoeuvring reconstruction of theinput variables or samples provides another effective way toalleviate the parameter drift It is noted that such a recon-struction does not require a new manoeuvring to obtain newinput-output samples for system identification butmodify theobtained samples Difference method provides a simple wayto reconstruct the samples [24]
Taking (13) as an example the following discrete equationcan be obtained
Δ119903 (119896 + 1) = Δ119903 (119896) + 1205791ΔV (119896) 119880 (119896) + 1205792Δ119903 (119896)119880 (119896)+ 1205793Δ120575 (119896)1198802 (119896) + 1205794 |ΔV (119896)| ΔV (119896)+ 1205795 |ΔV (119896)| Δ119903 (119896) + 1205796 |Δ119903 (119896)| Δ119903 (119896)+ 1205797ΔV (119896) |Δ119903 (119896)| + 1205798Δ1205753 (119896)1198802 (119896)+ 1205799ΔV2 (119896) Δ120575 (119896)+ 12057910ΔV (119896) Δ1205752 (119896) 119880 (119896)+ 12057911Δ119903 (119896) Δ1205752 (119896) 119880 (119896)+ 12057912Δ1199032 (119896) Δ120575 (119896)+ 12057913Δ119903 (119896) ΔV (119896) Δ120575 (119896) + 120579141198802 (119896)
(20)
where 1205791sim14 are the linear combinations of the hydrodynamiccoefficients with respect to the sway and yaw motion [23]Define vectorsΘ = [1205791 1205792 12057914]14times1 X (119896) = [ΔV (119896) 119880 (119896) Δ119903 (119896)119880 (119896) Δ120575 (119896)
sdot 1198802 (119896) |ΔV (119896)| ΔV (119896) |ΔV (119896)| Δ119903 (119896) |Δ119903 (119896)|
sdot Δ119903 (119896) ΔV (119896) |Δ119903 (119896)| Δ1205753 (119896) 1198802 (119896) ΔV2 (119896)sdot Δ120575 (119896) ΔV (119896) Δ1205752 (119896)119880 (119896) Δ119903 (119896) Δ1205752 (119896)sdot 119880 (119896) Δ1199032 (119896) Δ120575 (119896) Δ119903 (119896) ΔV (119896)sdot Δ120575 (119896) 1198802 (119896)]119879
14times1
(21)
Equation (20) can be rewritten as
Δ119903 (119896 + 1) = Δ119903 (119896) +ΘX (119896) (22)
At a neighbour sampling time the above equation becomes
Δ119903 (119896) = Δ119903 (119896 minus 1) +ΘX (119896 minus 1) (23)
Combined with (22) the following equality holds
119911 (119896) = 119911 (119896 minus 1) +ΘY (119896 minus 1) (24)
by definition of
119911 (119896) = Δ119903 (119896 + 1) minus Δ119903 (119896) Y (119896 minus 1) = X (119896) minus X (119896 minus 1) (25)
Comparing (23) with (24) it can be seen that although theinput-output pair are altered the coefficient matrix remainsthe same Usually if the degree of linear dependence of inputvariables in the original system is serious it could be mod-erated after difference of samples As a comparison Table 3lists the correlation coefficients after the difference method isemployed as shown below the principal diagonal (elementsabove the principal diagonal are the correlation coefficientswithout difference method shown in Table 2) As can beseen the linear dependence of the input variables has beenobviously decreased
333 Additional Signal Besides the difference methodanother approach to reconstruct the input-output samplescan be used which refers to the method of additional signalSuch a method had been successfully applied to the identifi-cation of shipmanoeuvring by analyzing simulation data [23]and captive model test results [54] Taking the system (22) asan example an additional ramp signal can be designed as
119910119886 (119896 + 1) = 119910119886 (119896) + 120582 (26)
where 120582 is a constant Adding this signal to (22) a newparameter system can be obtained as
[Δ119903 (119896 + 1) + 119910119886 (119896 + 1)]= [Δ119903 (119896) + 119910a (119896)] +ΘX (119896) + 120582 (27)
where the output variable and the first input variable changehowever the parameter matrix Θ related to hydrodynamiccoefficients does not The additional signal can be viewed asan additional excitation to the original system As a result themanoeuvring characteristics of the original system which
Mathematical Problems in Engineering 7
Table 3 Comparison of correlation coefficients using difference method
1198731015840V 1198731015840119903 1198731015840|V|V 1198731015840|V|119903 1198731015840120575 1198731015840120575120575120575 1198731015840V120575120575 1198731015840VV120575 1198731015840|119903|119903 1198731015840V|119903| 1198731015840119903120575120575 1198731015840119903119903120575 1198731015840119903V1205751198731015840V 100 045 098 067 091 092 099 097 039 084 054 054 0681198731015840119903 044 100 042 084 053 054 047 043 097 066 091 075 0811198731015840|V|V 083 031 100 066 083 085 098 100 032 077 050 042 0671198731015840|V|119903 034 021 038 100 062 064 068 066 075 087 092 073 1001198731015840120575 064 044 023 001 100 099 091 083 050 083 061 071 0621198731015840120575120575120575 050 033 025 013 074 100 092 085 050 083 062 069 0641198731015840V120575120575 084 041 077 036 048 066 100 098 040 083 055 053 0691198731015840VV120575 081 031 099 039 022 029 082 100 033 077 050 042 0671198731015840|119903|119903 034 088 003 007 054 035 028 004 100 062 086 081 0721198731015840V|119903| 057 027 021 046 058 041 040 019 030 100 078 082 0891198731015840119903120575120575 019 017 008 058 021 029 009 006 005 030 100 083 0911198731015840119903119903120575 029 032 015 016 072 044 009 018 049 062 050 100 0731198731015840119903V120575 032 011 033 090 001 009 026 032 016 049 073 024 100
Table 4 Comparison of correlation coefficients using additionalsignal
1198731 119873101584011198731015840V 0465 00811198731015840119903 0996 00111198731015840|V|V 0450 00261198731015840|V|119903 0849 00021198731015840120575 0552 00281198731015840120575120575120575 0556 00221198731015840V120575120575 0491 00051198731015840VV120575 0455 00291198731015840|119903|119903 0023 08341198731015840V|119903| 0970 00391198731015840119903120575120575 0665 00151198731015840119903119903120575 0912 00131198731015840119903V120575 0771 0024
might cause the parameter drift as described in the Sec-tion 31 are changed and the parameter drift can be alleviatedresultantly From the point of view of regression analysis theintroduction of the additional signal alters the input variableswhich might alleviate the degree of linear dependencebetween the changed variables and others Takingmodel (27)as an example assuming 120582 = 1 Table 4 lists the correlationcoefficients before and after the additional signal is attachedto the samples in which 1198731 = 11987310158401 = 1 indicates that coeffi-cient of the first input variable [Δ119903(119896)+119910119886(119896)] in (27) is one Ascan be seen from the comparison results the degree of lineardependence remarkably decreases for most of variables afteran additional signal is added
It is noted that the design of additional signal dependson the characteristic of the data samples or the manoeuvringmotion For periodically nonlinear motion such as zigzagmanoeuvre or turning circle manoeuvring the linear rampsignal like (26) works well [23] for a linear motion such asoblique towing test a nonlinear additional signal is moreappropriate [54]
Table 5 Hydrodynamic coefficients of KVLCC2 (times10minus5)Value X-coef Value Y-coef Value N-coef Value
1198831015840 minus954 1198831015840119906 minus93 1198841015840V minus358 1198731015840V minus631198841015840V minus1283 1198831015840VV 149 1198841015840119903 1980 1198731015840119903 minus741198841015840119903 0 1198831015840119903119903 minus108 1198841015840120575 448 1198731015840120575 minus1651198731015840V 0 1198831015840120575120575 minus105 1198841015840|V|V minus35 1198731015840|V|V 201198731015840119903 minus107 1198831015840V119903 minus237 1198841015840|V|119903 30 1198731015840|V|119903 minus991199091015840119866 3486 1198831015840V120575 172 1198841015840|119903|119903 679 1198731015840|119903|119903 minus171198981015840 1908 1198831015840119903120575 minus433 1198841015840V|119903| 158 1198731015840V|119903| minus431198681015840119911 119 11988310158400 minus48 1198841015840120575120575120575 minus94 1198731015840120575120575120575 22
1198841015840V120575120575 minus36 1198731015840V120575120575 171198841015840VV120575 minus73 1198731015840VV120575 121198841015840119903120575120575 minus23 1198731015840119903120575120575 221198841015840119903119903120575 134 1198731015840119903119903120575 minus401198841015840119903V120575 minus28 1198731015840119903V120575 3911988410158400 minus66 11987310158400 02
4 Example Study
The abovementioned measures on how to diminish the driftof hydrodynamic coefficients including difference methodand additional signal are employed in identifying a simplifiedAbkowitz model combined with free-running model tests ofaKVLCC2 SVMbased SI is used to obtain the hydrodynamiccoefficients The details of the mathematical model of shipmanoeuvring the SVM methodology the ship and themodel tests can be found in [24] and relevant literatureTable 5 lists the identification results of the hydrodynamiccoefficients in which the addedmasses and addedmoment ofinertia are calculated by slender-body theory as stated in Sec-tion 2 Based on the regression model 25∘5∘ zigzag manoeu-vring motion is simulated and the predicted results arecomparedwith the experimental results as shown in Figure 2Comparisons with the experimental results of other twomanoeuvres are presented in Figure 3 (20∘5∘ zigzagmanoeu-vre) and Figure 4 (20∘10∘ zigzag manoeuvre) respectivelyAs can be seen good agreement between prediction and
8 Mathematical Problems in Engineering
PredictionsExperiments
20 40 60 80 100 1200
20 40 60 80 100 1200
20 40 60 80 100 1200
20 40 60 80 100 1200Time (s)
minus500
50
051
15
u(m
s)
minus050
05
(m
s)
r(∘
s)
minus505
Heading (∘) and rudder angle (∘)
Figure 2 Prediction of 25∘5∘ zigzag manoeuvre of a KCLCC2 ship
PredictionsExperiments
05
1
15
u(m
s)
20 40 60 80 100 120 140 1600minus05
0
05
(m
s)
r(∘
s)
minus5
05
minus50
050
Heading (∘) and rudder angle (∘s)
20 40 60 80 100 120 140 1600
20 40 60 80 100 120 140 1600
20 40 60 80 100 120 140 1600Time (s)
Figure 3 Prediction of 20∘5∘ zigzag manoeuvre of a KCLCC2 ship
experiment is achieved It is owing not only to the use of SVMmethod a powerful modeling tool but also to the measurestaken to diminish the parameter drift
5 Conclusions
Parameter identifiability is an important issue for the SI appli-cation to the modeling of ship manoeuvring Some parame-ters in the manoeuvring model cannot be obtained using SIwhile some parameters deviate from true values even if theycan be derived Several measures are proposed to deal withthe problem of parameter identifiability and the validitiesare demonstrated by examples To determine the addedmasses and added moment of inertia slender-body theoryprovides a simple estimationmethod Todiminish the param-eter drift effect the mathematical model of ship manoeu-vring motion is simplified on the basis of regression analysis
PredictionsExperiments
r(∘
s)
Heading (∘) and rudder angle (∘s)
minus50
050
05
1
15
u(m
s)
minus05
0
05
(m
s)
minus5
05
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800Time (s)
Figure 4 Prediction of 20∘10∘ zigzagmanoeuvre of aKCLCC2 ship
difference of the samples and additional signal also take effectThese measures can be viewed as developed approaches thatare commonly used in regression analysis to diminish themulticollinearity For instance the simplification of a modelcan be viewed as a kind of pruning-variable method or PCRanalysis since the main components in the model remainedwhile some trivial variables are removed The additionalsignal method can be viewed as the opposition to pruning-variable method
Future work will be devoted to the study on a more accu-rate practical and universal estimation method for addedmasses and added moment of inertia since slender-bodymethod gives satisfactory results only for slender ships andldquomildrdquo manoeuvres Moreover how to design an appropriateadditional signal according to the characteristics of sampleswill be studied
Competing Interests
The author declares that they have no competing interests
Acknowledgments
This work was partially supported by the Special Item forUniversity in Fujian Province supported by the EducationDepartment (no JK15003) and the Special Item supportedby the Fujian Provincial Department of Ocean and Fisheries(no MHGX-16) The author is grateful to the Hamburg ShipModel Basin (HSVA) for providing the experimental data
References
[1] International Maritime Organization (IMO) ldquoStandards forship manoeuvrabilityrdquo Resolution MSC 137(76) 2002
Mathematical Problems in Engineering 9
[2] The Maneuvering Committee of ITTC ldquoFinal report andrecommendations to the 25th ITTCrdquo in Proceedings of the 25thInternational Towing Tank Conference pp 143ndash208 FukuokaJapan 2008
[3] G Rajesh and S K Bhattacharyya ldquoSystem identification fornonlinear maneuvering of large tankers using artificial neuralnetworkrdquo Applied Ocean Research vol 30 no 4 pp 256ndash2632008
[4] L Moreira and C Guedes Soares ldquoRecursive neural networkmodel of catamaran manoeuvringrdquo International Journal ofMaritime Engineering vol 154 pp A121ndashA130 2012
[5] W L Luo and Z J Zou ldquoBlind prediction of ship manoeuvringby using Support Vector Machinesrdquo in Proceedings of the the29th International Conference on Offshore Mechanics and ArcticEngineering (OMAE rsquo10) Shanghai China June 2010
[6] W Luo L Moreira and C Guedes Soares ldquoManoeuvringsimulation of catamaran by using implicit models based onsupport vector machinesrdquo Ocean Engineering vol 82 pp 150ndash159 2014
[7] T Holzhuter ldquoRobust identification in an adaptive track con-troller for shipsrdquo in Proceedings of the 3rd IFAC Symposium onAdaptive Systems in Control and Signal Processing pp 275ndash280Glasgow UK 1989
[8] R Munoz-Mansilla J Aranda J M Dıaz and J de la CruzldquoParametricmodel identification of high-speed craft dynamicsrdquoOcean Engineering vol 36 no 12-13 pp 1025ndash1038 2009
[9] M N Hayes Parameters identification of nonlinear stochasticsystems applied to ocean vehicle dynamics [PhD thesis] Mas-sachusetts Institute of Technology CambridgeMassUSA 1971
[10] J Van Amerongen ldquoAdaptive steering of ships-a model refer-ence approachrdquo Automatica vol 20 no 1 pp 3ndash14 1984
[11] M A Abkowitz ldquoMeasurement of hydrodynamic characteristicfrom shipmaneuvering trials by system identificationrdquoTransac-tions of Society of Naval Architects andMarine Engineers vol 88pp 283ndash318 1981
[12] L P Perera P Oliveira and C Guedes Soares ldquoSystemidentification of nonlinear vessel steeringrdquo Journal of OffshoreMechanics and Arctic Engineering vol 137 no 3 Article ID031302 pp 1ndash7 2015
[13] K J Astrom ldquoMaximum likelihood and prediction errormethodsrdquo Automatica vol 16 no 5 pp 551ndash574 1980
[14] C G Kallstrom and K J Astrom ldquoExperiences of systemidentification applied to ship steeringrdquo Automatica vol 17 no1 pp 187ndash198 1981
[15] W-W Zhou and M Blanke ldquoIdentification of a class ofnonlinear state-space models using RPE techniquesrdquo IEEETransactions on Automatic Control vol 34 no 3 pp 312ndash3161989
[16] E Revestido Herrero and F J Velasco Gonzalez ldquoTwo-stepidentification of non-linear manoeuvring models of marinevesselsrdquo Ocean Engineering vol 53 pp 72ndash82 2012
[17] R P Selvam S K Bhattacharyya andMHaddara ldquoA frequencydomain system identificationmethod for linear shipmaneuver-ingrdquo International Shipbuilding Progress vol 52 no 1 pp 5ndash272005
[18] S K Bhattacharyya andM R Haddara ldquoParametric identifica-tion for nonlinear ship maneuveringrdquo Journal of Ship Researchvol 50 no 3 pp 197ndash207 2006
[19] Y Chen Y Song and M Chen ldquoParameters identificationfor ship motion model based on particle swarm optimizationrdquoKybernetes vol 39 no 6 pp 871ndash880 2010
[20] Y T Dai L Q Liu and S S Feng ldquoOn the identification of cou-pled pitch and heave motions using opposition-based particleswarm optimizationrdquo Mathematical Problems in Engineeringvol 2014 Article ID 784049 10 pages 2014
[21] K-P Rhee S-Y Lee and Y-J Sung ldquoEstimation of manoeu-vring coefficients from PMM test by genetic algorithmrdquo inProceedings of the International Symposium and Workshop onForce Acting on aManoeuvringVessel Val de Reuil France 1998
[22] S Sutulo and C Guedes Soares ldquoAn algorithm for offlineidentification of ship manoeuvring mathematical models fromfree-running testsrdquo Ocean Engineering vol 79 pp 10ndash25 2014
[23] W L Luo and Z J Zou ldquoParametric identification of shipmaneuvering models by using support vector machinesrdquo Jour-nal of Ship Research vol 53 no 1 pp 19ndash30 2009
[24] W L Luo C Guedes Soares and Z J Zou ldquoParameteridentification of ship maneuvering model based on supportvector machines and particle swarm optimizationrdquo Journalof Offshore Mechanics and Arctic Engineering vol 138 no 3Article ID 031101 8 pages 2016
[25] W Y Hwang ldquoCancellation effect and parameter identifiabilityof ship steering dynamicsrdquo International Shipbuilding Progressvol 29 no 332 pp 90ndash120 1982
[26] C G Kallstrom ldquoIdentification and adaptive control applied toship steeringrdquo Tech Rep SSPAPUB-93 1982
[27] H D Nguyen ldquoRecursive identification of ship maneuveringdynamics and hydrodynamicsrdquo in Proceedings of the 36thEMAC Annual Conference pp C717ndashC732 Reykjavik Iceland2007
[28] F J Velasco I Zamanillo E Lopez and E Moyano ldquoParameterestimation of ship linear maneuvering modelsrdquo in Proceedingsof the OCEANS 2011 IEEE Santander Conference pp 1ndash8Santander Spain June 2011
[29] M R Haddara and Y Wang ldquoParametric identification ofmanoeuvring models for shipsrdquo International ShipbuildingProgress vol 46 no 445 pp 5ndash27 1999
[30] D Hess W Faller J Lee T Fu and E Ammeen ldquoShip maneu-vering simulation in wind and waves a nonlinear time-domainapproach using recursive neural networksrdquo in Proceedings of the26th Symposium on Naval Hydrodynamics Rome Italy 2006
[31] D Hess W Faller and J Lee ldquoReal-time nonlinear simulationof maneuvers for US navy combatant DTMB 5415rdquo in Pro-ceedings of the Workshop on Verification and Validation of ShipManeuvering Simulation Methods (SIMMAN rsquo08) pp E15ndashE21Copenhagen Denmark 2008
[32] M A Abkowitz ldquoLectures on ship hydrodynamicsmdashsteeringand manoeuvrabilityrdquo Tech Rep Hy-5 Hydro- and Aerody-namics Laboratory Lyngby Denmark 1964
[33] A Ogawa and H Kasai ldquoOn the mathematical model ofmanoeuvring motion of shipsrdquo International ShipbuildingProgress vol 25 no 292 pp 306ndash319 1978
[34] K Nomoto T Tagushi K Honda and S Hirano ldquoOn steeringqualities of shipsrdquo International Shipbuilding Progress vol 4 no35 pp 354ndash370 1957
[35] S Toxopeus ldquoValidation of slender-bodymethod for predictionof linear manoeuvring coefficients using experiments andviscous-flow calculationsrdquo in Proceedings of the 7th ICHDInternational Conference on Hydrodynamics (ICHD rsquo06) pp589ndash598 University of Naples ldquoFederico IIrdquo October 2006
[36] T-I Lee K-S Ahn H-S Lee and D-K Yum ldquoOn anempirical prediction of hydrodynamic coefficients for modernship hullsrdquo in Proceedings of the International Conference on
10 Mathematical Problems in Engineering
Marine Simulation and Ship Manoeuvrability (MARSIM rsquo03)Kanazawa Japan August 2003
[37] HNorrbinNils ldquoTheory and observations on the use of amath-ematical model for ship manoeuvring in deep and confinedwatersrdquo Report No SSPA-Pub-68 Swedish State ShipbuildingExperimental Tank Goteborg 1971
[38] R-C ZhuH-QGuo G-PMiao and J-W Yu ldquoComputationalmethod for evaluation of addedmass anddamping of ship basedon CFD theoryrdquo Journal of Shanghai Jiaotong University vol 43no 2 pp 198ndash203 2009
[39] J N NewmanMarine Hydrodynamics MIT Press CambridgeMass USA 1977
[40] M S Chislett and J Strom-Tejsen ldquoPlanar motion mechanismtests and full-scale steering and maneuvering predictions for aMariner class vesselrdquo International Shipbuilding Progress vol 12pp 201ndash224 1965
[41] M Z Fabrycy ldquoMulticollinearity caused by specificationerrorsrdquo Applied Statistics vol 24 no 2 pp 250ndash254 1975
[42] W L LuoOn themodeling of shipmanoeuvring by using supportvector machines [PhD thesis] Shanghai Jiao Tong UniversityShanghai China 2009
[43] S S Bowles and H M Levin ldquoMore on multicollinearity andthe effectiveness of schoolsrdquo The Journal of Human Resourcesvol 3 no 3 pp 393ndash400 1968
[44] I Jolliffe Principal Component Analysis John Wiley amp Sons2002
[45] SWold A Ruhe HWold andW J Dunn III ldquoThe collinearityproblem in linear regression The Partial Least Squares (PLS)approach to generalized inversesrdquo SIAM Journal on Scientificand Statistical Computing vol 5 no 3 pp 735ndash743 1984
[46] A G Ivakhnenko and J A Muller ldquoPresent state and newproblems of further GMDH developmentrdquo Systems AnalysisModeling Simulation vol 20 pp 3ndash16 1995
[47] H K Yoon and K P Rhee ldquoIdentification of hydrodynamiccoefficients in ship maneuvering equations of motion byEstimation-Before-Modeling techniquerdquo Ocean Engineeringvol 30 no 18 pp 2379ndash2404 2003
[48] S M Yeon D J Yeo and K P Rhee ldquoOptimal input designfor the identification of low-speed manoeuvring mathemati-cal modelrdquo in Proceedings of the International Conference onMarine Simulation and Ship Manoeuvrability (MARSIM rsquo06)Terschelling The Netherlands June 2006
[49] W Y HwangApplication of system identification to ship maneu-vering [PhD thesis] Massachusetts Institute of TechnologyCambridge Mass USA 1980
[50] K P Rhee and K Kim ldquoA new sea trial method for estimatinghydrodynamic derivativesrdquo Ship Ocean Technology vol 3 no 3pp 25ndash44 1999
[51] M Viviani R Depascale L Sebastiani C Podenzana Bon-vino R Dattola and M Soave ldquoAlternative methods forthe identification of hydrodynamic derivatives from standardmanoeuvresrdquo in Proceedings of the International Conference onMarine Simulation and Ship Manoeuvrability (MARSIM rsquo03)Kanazawa Japan August 2003
[52] W-L Luo and Z-J Zou ldquoElimination of simultaneous driftand sensitivity analysis in the hydrodynamic modeling of shipmanoeuvringrdquo Journal of Shanghai Jiaotong University vol 42no 8 pp 1358ndash1362 2008
[53] R R Shenoi P Krishnankutty and R P Selvam ldquoSensitivitystudy of hydrodynamic derivative variations on the maneu-verability prediction of a container shiprdquo in Proceedings of the
ASME 34th International Conference on Ocean Offshore andArctic Engineering (OMAE rsquo15) American Society ofMechanicalEngineers June 2015
[54] W L Luo and Z J Zou ldquoAnalysis of captive model obliquetowing test by using least squares support vector machinesrdquoShipbuilding of China vol 51 no 2 pp 10ndash14 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
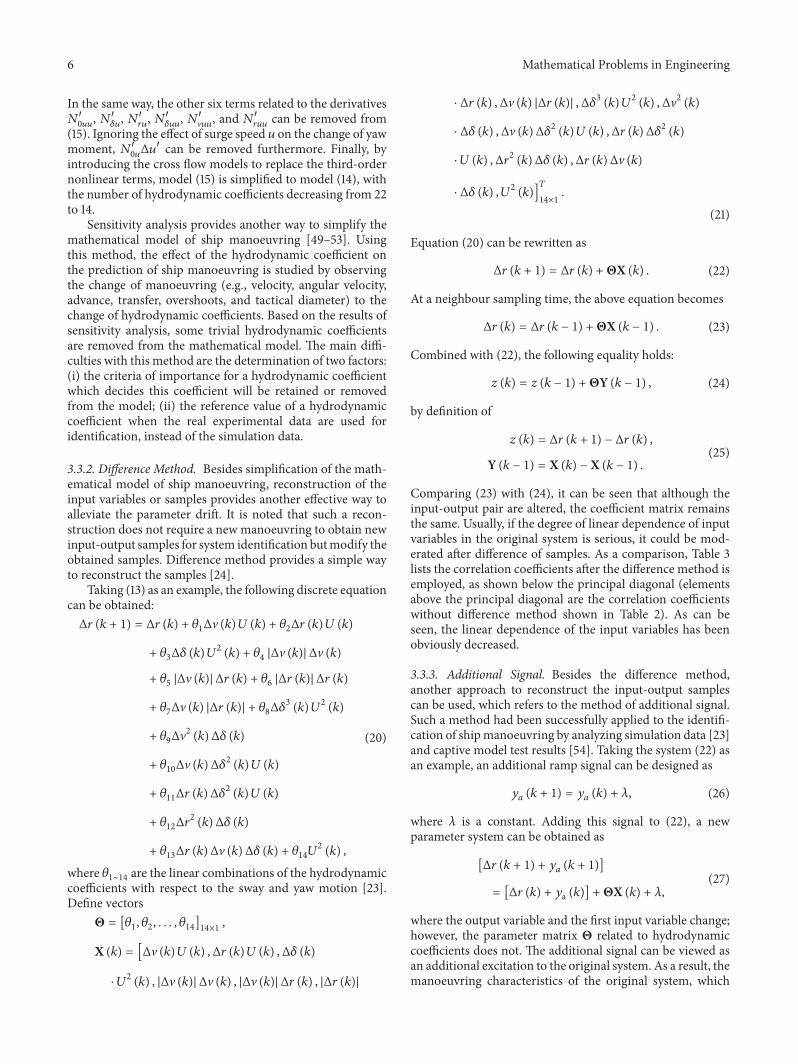
6 Mathematical Problems in Engineering
In the same way the other six terms related to the derivatives11987310158400119906119906 1198731015840120575119906 1198731015840119903119906 1198731015840120575119906119906 1198731015840V119906119906 and 1198731015840119903119906119906 can be removed from(15) Ignoring the effect of surge speed 119906 on the change of yawmoment 11987310158400119906Δ1199061015840 can be removed furthermore Finally byintroducing the cross flow models to replace the third-ordernonlinear terms model (15) is simplified to model (14) withthe number of hydrodynamic coefficients decreasing from 22to 14
Sensitivity analysis provides another way to simplify themathematical model of ship manoeuvring [49ndash53] Usingthis method the effect of the hydrodynamic coefficient onthe prediction of ship manoeuvring is studied by observingthe change of manoeuvring (eg velocity angular velocityadvance transfer overshoots and tactical diameter) to thechange of hydrodynamic coefficients Based on the results ofsensitivity analysis some trivial hydrodynamic coefficientsare removed from the mathematical model The main diffi-culties with this method are the determination of two factors(i) the criteria of importance for a hydrodynamic coefficientwhich decides this coefficient will be retained or removedfrom the model (ii) the reference value of a hydrodynamiccoefficient when the real experimental data are used foridentification instead of the simulation data
332 Difference Method Besides simplification of the math-ematical model of ship manoeuvring reconstruction of theinput variables or samples provides another effective way toalleviate the parameter drift It is noted that such a recon-struction does not require a new manoeuvring to obtain newinput-output samples for system identification butmodify theobtained samples Difference method provides a simple wayto reconstruct the samples [24]
Taking (13) as an example the following discrete equationcan be obtained
Δ119903 (119896 + 1) = Δ119903 (119896) + 1205791ΔV (119896) 119880 (119896) + 1205792Δ119903 (119896)119880 (119896)+ 1205793Δ120575 (119896)1198802 (119896) + 1205794 |ΔV (119896)| ΔV (119896)+ 1205795 |ΔV (119896)| Δ119903 (119896) + 1205796 |Δ119903 (119896)| Δ119903 (119896)+ 1205797ΔV (119896) |Δ119903 (119896)| + 1205798Δ1205753 (119896)1198802 (119896)+ 1205799ΔV2 (119896) Δ120575 (119896)+ 12057910ΔV (119896) Δ1205752 (119896) 119880 (119896)+ 12057911Δ119903 (119896) Δ1205752 (119896) 119880 (119896)+ 12057912Δ1199032 (119896) Δ120575 (119896)+ 12057913Δ119903 (119896) ΔV (119896) Δ120575 (119896) + 120579141198802 (119896)
(20)
where 1205791sim14 are the linear combinations of the hydrodynamiccoefficients with respect to the sway and yaw motion [23]Define vectorsΘ = [1205791 1205792 12057914]14times1 X (119896) = [ΔV (119896) 119880 (119896) Δ119903 (119896)119880 (119896) Δ120575 (119896)
sdot 1198802 (119896) |ΔV (119896)| ΔV (119896) |ΔV (119896)| Δ119903 (119896) |Δ119903 (119896)|
sdot Δ119903 (119896) ΔV (119896) |Δ119903 (119896)| Δ1205753 (119896) 1198802 (119896) ΔV2 (119896)sdot Δ120575 (119896) ΔV (119896) Δ1205752 (119896)119880 (119896) Δ119903 (119896) Δ1205752 (119896)sdot 119880 (119896) Δ1199032 (119896) Δ120575 (119896) Δ119903 (119896) ΔV (119896)sdot Δ120575 (119896) 1198802 (119896)]119879
14times1
(21)
Equation (20) can be rewritten as
Δ119903 (119896 + 1) = Δ119903 (119896) +ΘX (119896) (22)
At a neighbour sampling time the above equation becomes
Δ119903 (119896) = Δ119903 (119896 minus 1) +ΘX (119896 minus 1) (23)
Combined with (22) the following equality holds
119911 (119896) = 119911 (119896 minus 1) +ΘY (119896 minus 1) (24)
by definition of
119911 (119896) = Δ119903 (119896 + 1) minus Δ119903 (119896) Y (119896 minus 1) = X (119896) minus X (119896 minus 1) (25)
Comparing (23) with (24) it can be seen that although theinput-output pair are altered the coefficient matrix remainsthe same Usually if the degree of linear dependence of inputvariables in the original system is serious it could be mod-erated after difference of samples As a comparison Table 3lists the correlation coefficients after the difference method isemployed as shown below the principal diagonal (elementsabove the principal diagonal are the correlation coefficientswithout difference method shown in Table 2) As can beseen the linear dependence of the input variables has beenobviously decreased
333 Additional Signal Besides the difference methodanother approach to reconstruct the input-output samplescan be used which refers to the method of additional signalSuch a method had been successfully applied to the identifi-cation of shipmanoeuvring by analyzing simulation data [23]and captive model test results [54] Taking the system (22) asan example an additional ramp signal can be designed as
119910119886 (119896 + 1) = 119910119886 (119896) + 120582 (26)
where 120582 is a constant Adding this signal to (22) a newparameter system can be obtained as
[Δ119903 (119896 + 1) + 119910119886 (119896 + 1)]= [Δ119903 (119896) + 119910a (119896)] +ΘX (119896) + 120582 (27)
where the output variable and the first input variable changehowever the parameter matrix Θ related to hydrodynamiccoefficients does not The additional signal can be viewed asan additional excitation to the original system As a result themanoeuvring characteristics of the original system which
Mathematical Problems in Engineering 7
Table 3 Comparison of correlation coefficients using difference method
1198731015840V 1198731015840119903 1198731015840|V|V 1198731015840|V|119903 1198731015840120575 1198731015840120575120575120575 1198731015840V120575120575 1198731015840VV120575 1198731015840|119903|119903 1198731015840V|119903| 1198731015840119903120575120575 1198731015840119903119903120575 1198731015840119903V1205751198731015840V 100 045 098 067 091 092 099 097 039 084 054 054 0681198731015840119903 044 100 042 084 053 054 047 043 097 066 091 075 0811198731015840|V|V 083 031 100 066 083 085 098 100 032 077 050 042 0671198731015840|V|119903 034 021 038 100 062 064 068 066 075 087 092 073 1001198731015840120575 064 044 023 001 100 099 091 083 050 083 061 071 0621198731015840120575120575120575 050 033 025 013 074 100 092 085 050 083 062 069 0641198731015840V120575120575 084 041 077 036 048 066 100 098 040 083 055 053 0691198731015840VV120575 081 031 099 039 022 029 082 100 033 077 050 042 0671198731015840|119903|119903 034 088 003 007 054 035 028 004 100 062 086 081 0721198731015840V|119903| 057 027 021 046 058 041 040 019 030 100 078 082 0891198731015840119903120575120575 019 017 008 058 021 029 009 006 005 030 100 083 0911198731015840119903119903120575 029 032 015 016 072 044 009 018 049 062 050 100 0731198731015840119903V120575 032 011 033 090 001 009 026 032 016 049 073 024 100
Table 4 Comparison of correlation coefficients using additionalsignal
1198731 119873101584011198731015840V 0465 00811198731015840119903 0996 00111198731015840|V|V 0450 00261198731015840|V|119903 0849 00021198731015840120575 0552 00281198731015840120575120575120575 0556 00221198731015840V120575120575 0491 00051198731015840VV120575 0455 00291198731015840|119903|119903 0023 08341198731015840V|119903| 0970 00391198731015840119903120575120575 0665 00151198731015840119903119903120575 0912 00131198731015840119903V120575 0771 0024
might cause the parameter drift as described in the Sec-tion 31 are changed and the parameter drift can be alleviatedresultantly From the point of view of regression analysis theintroduction of the additional signal alters the input variableswhich might alleviate the degree of linear dependencebetween the changed variables and others Takingmodel (27)as an example assuming 120582 = 1 Table 4 lists the correlationcoefficients before and after the additional signal is attachedto the samples in which 1198731 = 11987310158401 = 1 indicates that coeffi-cient of the first input variable [Δ119903(119896)+119910119886(119896)] in (27) is one Ascan be seen from the comparison results the degree of lineardependence remarkably decreases for most of variables afteran additional signal is added
It is noted that the design of additional signal dependson the characteristic of the data samples or the manoeuvringmotion For periodically nonlinear motion such as zigzagmanoeuvre or turning circle manoeuvring the linear rampsignal like (26) works well [23] for a linear motion such asoblique towing test a nonlinear additional signal is moreappropriate [54]
Table 5 Hydrodynamic coefficients of KVLCC2 (times10minus5)Value X-coef Value Y-coef Value N-coef Value
1198831015840 minus954 1198831015840119906 minus93 1198841015840V minus358 1198731015840V minus631198841015840V minus1283 1198831015840VV 149 1198841015840119903 1980 1198731015840119903 minus741198841015840119903 0 1198831015840119903119903 minus108 1198841015840120575 448 1198731015840120575 minus1651198731015840V 0 1198831015840120575120575 minus105 1198841015840|V|V minus35 1198731015840|V|V 201198731015840119903 minus107 1198831015840V119903 minus237 1198841015840|V|119903 30 1198731015840|V|119903 minus991199091015840119866 3486 1198831015840V120575 172 1198841015840|119903|119903 679 1198731015840|119903|119903 minus171198981015840 1908 1198831015840119903120575 minus433 1198841015840V|119903| 158 1198731015840V|119903| minus431198681015840119911 119 11988310158400 minus48 1198841015840120575120575120575 minus94 1198731015840120575120575120575 22
1198841015840V120575120575 minus36 1198731015840V120575120575 171198841015840VV120575 minus73 1198731015840VV120575 121198841015840119903120575120575 minus23 1198731015840119903120575120575 221198841015840119903119903120575 134 1198731015840119903119903120575 minus401198841015840119903V120575 minus28 1198731015840119903V120575 3911988410158400 minus66 11987310158400 02
4 Example Study
The abovementioned measures on how to diminish the driftof hydrodynamic coefficients including difference methodand additional signal are employed in identifying a simplifiedAbkowitz model combined with free-running model tests ofaKVLCC2 SVMbased SI is used to obtain the hydrodynamiccoefficients The details of the mathematical model of shipmanoeuvring the SVM methodology the ship and themodel tests can be found in [24] and relevant literatureTable 5 lists the identification results of the hydrodynamiccoefficients in which the addedmasses and addedmoment ofinertia are calculated by slender-body theory as stated in Sec-tion 2 Based on the regression model 25∘5∘ zigzag manoeu-vring motion is simulated and the predicted results arecomparedwith the experimental results as shown in Figure 2Comparisons with the experimental results of other twomanoeuvres are presented in Figure 3 (20∘5∘ zigzagmanoeu-vre) and Figure 4 (20∘10∘ zigzag manoeuvre) respectivelyAs can be seen good agreement between prediction and
8 Mathematical Problems in Engineering
PredictionsExperiments
20 40 60 80 100 1200
20 40 60 80 100 1200
20 40 60 80 100 1200
20 40 60 80 100 1200Time (s)
minus500
50
051
15
u(m
s)
minus050
05
(m
s)
r(∘
s)
minus505
Heading (∘) and rudder angle (∘)
Figure 2 Prediction of 25∘5∘ zigzag manoeuvre of a KCLCC2 ship
PredictionsExperiments
05
1
15
u(m
s)
20 40 60 80 100 120 140 1600minus05
0
05
(m
s)
r(∘
s)
minus5
05
minus50
050
Heading (∘) and rudder angle (∘s)
20 40 60 80 100 120 140 1600
20 40 60 80 100 120 140 1600
20 40 60 80 100 120 140 1600Time (s)
Figure 3 Prediction of 20∘5∘ zigzag manoeuvre of a KCLCC2 ship
experiment is achieved It is owing not only to the use of SVMmethod a powerful modeling tool but also to the measurestaken to diminish the parameter drift
5 Conclusions
Parameter identifiability is an important issue for the SI appli-cation to the modeling of ship manoeuvring Some parame-ters in the manoeuvring model cannot be obtained using SIwhile some parameters deviate from true values even if theycan be derived Several measures are proposed to deal withthe problem of parameter identifiability and the validitiesare demonstrated by examples To determine the addedmasses and added moment of inertia slender-body theoryprovides a simple estimationmethod Todiminish the param-eter drift effect the mathematical model of ship manoeu-vring motion is simplified on the basis of regression analysis
PredictionsExperiments
r(∘
s)
Heading (∘) and rudder angle (∘s)
minus50
050
05
1
15
u(m
s)
minus05
0
05
(m
s)
minus5
05
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800Time (s)
Figure 4 Prediction of 20∘10∘ zigzagmanoeuvre of aKCLCC2 ship
difference of the samples and additional signal also take effectThese measures can be viewed as developed approaches thatare commonly used in regression analysis to diminish themulticollinearity For instance the simplification of a modelcan be viewed as a kind of pruning-variable method or PCRanalysis since the main components in the model remainedwhile some trivial variables are removed The additionalsignal method can be viewed as the opposition to pruning-variable method
Future work will be devoted to the study on a more accu-rate practical and universal estimation method for addedmasses and added moment of inertia since slender-bodymethod gives satisfactory results only for slender ships andldquomildrdquo manoeuvres Moreover how to design an appropriateadditional signal according to the characteristics of sampleswill be studied
Competing Interests
The author declares that they have no competing interests
Acknowledgments
This work was partially supported by the Special Item forUniversity in Fujian Province supported by the EducationDepartment (no JK15003) and the Special Item supportedby the Fujian Provincial Department of Ocean and Fisheries(no MHGX-16) The author is grateful to the Hamburg ShipModel Basin (HSVA) for providing the experimental data
References
[1] International Maritime Organization (IMO) ldquoStandards forship manoeuvrabilityrdquo Resolution MSC 137(76) 2002
Mathematical Problems in Engineering 9
[2] The Maneuvering Committee of ITTC ldquoFinal report andrecommendations to the 25th ITTCrdquo in Proceedings of the 25thInternational Towing Tank Conference pp 143ndash208 FukuokaJapan 2008
[3] G Rajesh and S K Bhattacharyya ldquoSystem identification fornonlinear maneuvering of large tankers using artificial neuralnetworkrdquo Applied Ocean Research vol 30 no 4 pp 256ndash2632008
[4] L Moreira and C Guedes Soares ldquoRecursive neural networkmodel of catamaran manoeuvringrdquo International Journal ofMaritime Engineering vol 154 pp A121ndashA130 2012
[5] W L Luo and Z J Zou ldquoBlind prediction of ship manoeuvringby using Support Vector Machinesrdquo in Proceedings of the the29th International Conference on Offshore Mechanics and ArcticEngineering (OMAE rsquo10) Shanghai China June 2010
[6] W Luo L Moreira and C Guedes Soares ldquoManoeuvringsimulation of catamaran by using implicit models based onsupport vector machinesrdquo Ocean Engineering vol 82 pp 150ndash159 2014
[7] T Holzhuter ldquoRobust identification in an adaptive track con-troller for shipsrdquo in Proceedings of the 3rd IFAC Symposium onAdaptive Systems in Control and Signal Processing pp 275ndash280Glasgow UK 1989
[8] R Munoz-Mansilla J Aranda J M Dıaz and J de la CruzldquoParametricmodel identification of high-speed craft dynamicsrdquoOcean Engineering vol 36 no 12-13 pp 1025ndash1038 2009
[9] M N Hayes Parameters identification of nonlinear stochasticsystems applied to ocean vehicle dynamics [PhD thesis] Mas-sachusetts Institute of Technology CambridgeMassUSA 1971
[10] J Van Amerongen ldquoAdaptive steering of ships-a model refer-ence approachrdquo Automatica vol 20 no 1 pp 3ndash14 1984
[11] M A Abkowitz ldquoMeasurement of hydrodynamic characteristicfrom shipmaneuvering trials by system identificationrdquoTransac-tions of Society of Naval Architects andMarine Engineers vol 88pp 283ndash318 1981
[12] L P Perera P Oliveira and C Guedes Soares ldquoSystemidentification of nonlinear vessel steeringrdquo Journal of OffshoreMechanics and Arctic Engineering vol 137 no 3 Article ID031302 pp 1ndash7 2015
[13] K J Astrom ldquoMaximum likelihood and prediction errormethodsrdquo Automatica vol 16 no 5 pp 551ndash574 1980
[14] C G Kallstrom and K J Astrom ldquoExperiences of systemidentification applied to ship steeringrdquo Automatica vol 17 no1 pp 187ndash198 1981
[15] W-W Zhou and M Blanke ldquoIdentification of a class ofnonlinear state-space models using RPE techniquesrdquo IEEETransactions on Automatic Control vol 34 no 3 pp 312ndash3161989
[16] E Revestido Herrero and F J Velasco Gonzalez ldquoTwo-stepidentification of non-linear manoeuvring models of marinevesselsrdquo Ocean Engineering vol 53 pp 72ndash82 2012
[17] R P Selvam S K Bhattacharyya andMHaddara ldquoA frequencydomain system identificationmethod for linear shipmaneuver-ingrdquo International Shipbuilding Progress vol 52 no 1 pp 5ndash272005
[18] S K Bhattacharyya andM R Haddara ldquoParametric identifica-tion for nonlinear ship maneuveringrdquo Journal of Ship Researchvol 50 no 3 pp 197ndash207 2006
[19] Y Chen Y Song and M Chen ldquoParameters identificationfor ship motion model based on particle swarm optimizationrdquoKybernetes vol 39 no 6 pp 871ndash880 2010
[20] Y T Dai L Q Liu and S S Feng ldquoOn the identification of cou-pled pitch and heave motions using opposition-based particleswarm optimizationrdquo Mathematical Problems in Engineeringvol 2014 Article ID 784049 10 pages 2014
[21] K-P Rhee S-Y Lee and Y-J Sung ldquoEstimation of manoeu-vring coefficients from PMM test by genetic algorithmrdquo inProceedings of the International Symposium and Workshop onForce Acting on aManoeuvringVessel Val de Reuil France 1998
[22] S Sutulo and C Guedes Soares ldquoAn algorithm for offlineidentification of ship manoeuvring mathematical models fromfree-running testsrdquo Ocean Engineering vol 79 pp 10ndash25 2014
[23] W L Luo and Z J Zou ldquoParametric identification of shipmaneuvering models by using support vector machinesrdquo Jour-nal of Ship Research vol 53 no 1 pp 19ndash30 2009
[24] W L Luo C Guedes Soares and Z J Zou ldquoParameteridentification of ship maneuvering model based on supportvector machines and particle swarm optimizationrdquo Journalof Offshore Mechanics and Arctic Engineering vol 138 no 3Article ID 031101 8 pages 2016
[25] W Y Hwang ldquoCancellation effect and parameter identifiabilityof ship steering dynamicsrdquo International Shipbuilding Progressvol 29 no 332 pp 90ndash120 1982
[26] C G Kallstrom ldquoIdentification and adaptive control applied toship steeringrdquo Tech Rep SSPAPUB-93 1982
[27] H D Nguyen ldquoRecursive identification of ship maneuveringdynamics and hydrodynamicsrdquo in Proceedings of the 36thEMAC Annual Conference pp C717ndashC732 Reykjavik Iceland2007
[28] F J Velasco I Zamanillo E Lopez and E Moyano ldquoParameterestimation of ship linear maneuvering modelsrdquo in Proceedingsof the OCEANS 2011 IEEE Santander Conference pp 1ndash8Santander Spain June 2011
[29] M R Haddara and Y Wang ldquoParametric identification ofmanoeuvring models for shipsrdquo International ShipbuildingProgress vol 46 no 445 pp 5ndash27 1999
[30] D Hess W Faller J Lee T Fu and E Ammeen ldquoShip maneu-vering simulation in wind and waves a nonlinear time-domainapproach using recursive neural networksrdquo in Proceedings of the26th Symposium on Naval Hydrodynamics Rome Italy 2006
[31] D Hess W Faller and J Lee ldquoReal-time nonlinear simulationof maneuvers for US navy combatant DTMB 5415rdquo in Pro-ceedings of the Workshop on Verification and Validation of ShipManeuvering Simulation Methods (SIMMAN rsquo08) pp E15ndashE21Copenhagen Denmark 2008
[32] M A Abkowitz ldquoLectures on ship hydrodynamicsmdashsteeringand manoeuvrabilityrdquo Tech Rep Hy-5 Hydro- and Aerody-namics Laboratory Lyngby Denmark 1964
[33] A Ogawa and H Kasai ldquoOn the mathematical model ofmanoeuvring motion of shipsrdquo International ShipbuildingProgress vol 25 no 292 pp 306ndash319 1978
[34] K Nomoto T Tagushi K Honda and S Hirano ldquoOn steeringqualities of shipsrdquo International Shipbuilding Progress vol 4 no35 pp 354ndash370 1957
[35] S Toxopeus ldquoValidation of slender-bodymethod for predictionof linear manoeuvring coefficients using experiments andviscous-flow calculationsrdquo in Proceedings of the 7th ICHDInternational Conference on Hydrodynamics (ICHD rsquo06) pp589ndash598 University of Naples ldquoFederico IIrdquo October 2006
[36] T-I Lee K-S Ahn H-S Lee and D-K Yum ldquoOn anempirical prediction of hydrodynamic coefficients for modernship hullsrdquo in Proceedings of the International Conference on
10 Mathematical Problems in Engineering
Marine Simulation and Ship Manoeuvrability (MARSIM rsquo03)Kanazawa Japan August 2003
[37] HNorrbinNils ldquoTheory and observations on the use of amath-ematical model for ship manoeuvring in deep and confinedwatersrdquo Report No SSPA-Pub-68 Swedish State ShipbuildingExperimental Tank Goteborg 1971
[38] R-C ZhuH-QGuo G-PMiao and J-W Yu ldquoComputationalmethod for evaluation of addedmass anddamping of ship basedon CFD theoryrdquo Journal of Shanghai Jiaotong University vol 43no 2 pp 198ndash203 2009
[39] J N NewmanMarine Hydrodynamics MIT Press CambridgeMass USA 1977
[40] M S Chislett and J Strom-Tejsen ldquoPlanar motion mechanismtests and full-scale steering and maneuvering predictions for aMariner class vesselrdquo International Shipbuilding Progress vol 12pp 201ndash224 1965
[41] M Z Fabrycy ldquoMulticollinearity caused by specificationerrorsrdquo Applied Statistics vol 24 no 2 pp 250ndash254 1975
[42] W L LuoOn themodeling of shipmanoeuvring by using supportvector machines [PhD thesis] Shanghai Jiao Tong UniversityShanghai China 2009
[43] S S Bowles and H M Levin ldquoMore on multicollinearity andthe effectiveness of schoolsrdquo The Journal of Human Resourcesvol 3 no 3 pp 393ndash400 1968
[44] I Jolliffe Principal Component Analysis John Wiley amp Sons2002
[45] SWold A Ruhe HWold andW J Dunn III ldquoThe collinearityproblem in linear regression The Partial Least Squares (PLS)approach to generalized inversesrdquo SIAM Journal on Scientificand Statistical Computing vol 5 no 3 pp 735ndash743 1984
[46] A G Ivakhnenko and J A Muller ldquoPresent state and newproblems of further GMDH developmentrdquo Systems AnalysisModeling Simulation vol 20 pp 3ndash16 1995
[47] H K Yoon and K P Rhee ldquoIdentification of hydrodynamiccoefficients in ship maneuvering equations of motion byEstimation-Before-Modeling techniquerdquo Ocean Engineeringvol 30 no 18 pp 2379ndash2404 2003
[48] S M Yeon D J Yeo and K P Rhee ldquoOptimal input designfor the identification of low-speed manoeuvring mathemati-cal modelrdquo in Proceedings of the International Conference onMarine Simulation and Ship Manoeuvrability (MARSIM rsquo06)Terschelling The Netherlands June 2006
[49] W Y HwangApplication of system identification to ship maneu-vering [PhD thesis] Massachusetts Institute of TechnologyCambridge Mass USA 1980
[50] K P Rhee and K Kim ldquoA new sea trial method for estimatinghydrodynamic derivativesrdquo Ship Ocean Technology vol 3 no 3pp 25ndash44 1999
[51] M Viviani R Depascale L Sebastiani C Podenzana Bon-vino R Dattola and M Soave ldquoAlternative methods forthe identification of hydrodynamic derivatives from standardmanoeuvresrdquo in Proceedings of the International Conference onMarine Simulation and Ship Manoeuvrability (MARSIM rsquo03)Kanazawa Japan August 2003
[52] W-L Luo and Z-J Zou ldquoElimination of simultaneous driftand sensitivity analysis in the hydrodynamic modeling of shipmanoeuvringrdquo Journal of Shanghai Jiaotong University vol 42no 8 pp 1358ndash1362 2008
[53] R R Shenoi P Krishnankutty and R P Selvam ldquoSensitivitystudy of hydrodynamic derivative variations on the maneu-verability prediction of a container shiprdquo in Proceedings of the
ASME 34th International Conference on Ocean Offshore andArctic Engineering (OMAE rsquo15) American Society ofMechanicalEngineers June 2015
[54] W L Luo and Z J Zou ldquoAnalysis of captive model obliquetowing test by using least squares support vector machinesrdquoShipbuilding of China vol 51 no 2 pp 10ndash14 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
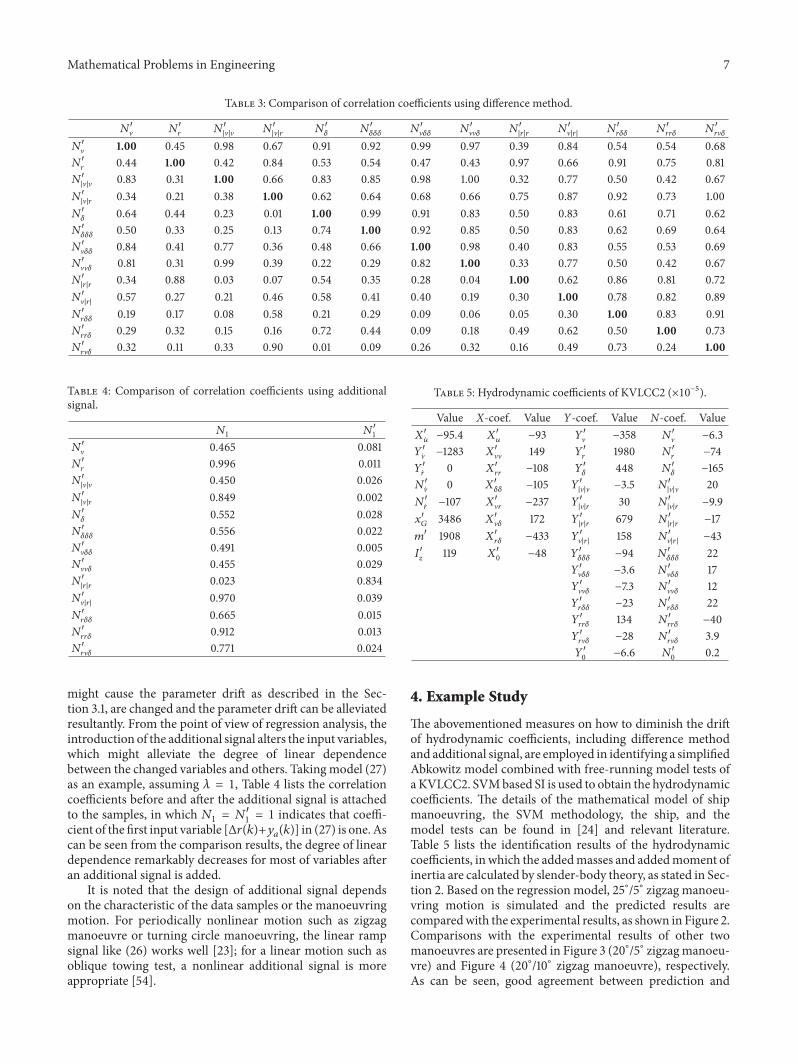
Mathematical Problems in Engineering 7
Table 3 Comparison of correlation coefficients using difference method
1198731015840V 1198731015840119903 1198731015840|V|V 1198731015840|V|119903 1198731015840120575 1198731015840120575120575120575 1198731015840V120575120575 1198731015840VV120575 1198731015840|119903|119903 1198731015840V|119903| 1198731015840119903120575120575 1198731015840119903119903120575 1198731015840119903V1205751198731015840V 100 045 098 067 091 092 099 097 039 084 054 054 0681198731015840119903 044 100 042 084 053 054 047 043 097 066 091 075 0811198731015840|V|V 083 031 100 066 083 085 098 100 032 077 050 042 0671198731015840|V|119903 034 021 038 100 062 064 068 066 075 087 092 073 1001198731015840120575 064 044 023 001 100 099 091 083 050 083 061 071 0621198731015840120575120575120575 050 033 025 013 074 100 092 085 050 083 062 069 0641198731015840V120575120575 084 041 077 036 048 066 100 098 040 083 055 053 0691198731015840VV120575 081 031 099 039 022 029 082 100 033 077 050 042 0671198731015840|119903|119903 034 088 003 007 054 035 028 004 100 062 086 081 0721198731015840V|119903| 057 027 021 046 058 041 040 019 030 100 078 082 0891198731015840119903120575120575 019 017 008 058 021 029 009 006 005 030 100 083 0911198731015840119903119903120575 029 032 015 016 072 044 009 018 049 062 050 100 0731198731015840119903V120575 032 011 033 090 001 009 026 032 016 049 073 024 100
Table 4 Comparison of correlation coefficients using additionalsignal
1198731 119873101584011198731015840V 0465 00811198731015840119903 0996 00111198731015840|V|V 0450 00261198731015840|V|119903 0849 00021198731015840120575 0552 00281198731015840120575120575120575 0556 00221198731015840V120575120575 0491 00051198731015840VV120575 0455 00291198731015840|119903|119903 0023 08341198731015840V|119903| 0970 00391198731015840119903120575120575 0665 00151198731015840119903119903120575 0912 00131198731015840119903V120575 0771 0024
might cause the parameter drift as described in the Sec-tion 31 are changed and the parameter drift can be alleviatedresultantly From the point of view of regression analysis theintroduction of the additional signal alters the input variableswhich might alleviate the degree of linear dependencebetween the changed variables and others Takingmodel (27)as an example assuming 120582 = 1 Table 4 lists the correlationcoefficients before and after the additional signal is attachedto the samples in which 1198731 = 11987310158401 = 1 indicates that coeffi-cient of the first input variable [Δ119903(119896)+119910119886(119896)] in (27) is one Ascan be seen from the comparison results the degree of lineardependence remarkably decreases for most of variables afteran additional signal is added
It is noted that the design of additional signal dependson the characteristic of the data samples or the manoeuvringmotion For periodically nonlinear motion such as zigzagmanoeuvre or turning circle manoeuvring the linear rampsignal like (26) works well [23] for a linear motion such asoblique towing test a nonlinear additional signal is moreappropriate [54]
Table 5 Hydrodynamic coefficients of KVLCC2 (times10minus5)Value X-coef Value Y-coef Value N-coef Value
1198831015840 minus954 1198831015840119906 minus93 1198841015840V minus358 1198731015840V minus631198841015840V minus1283 1198831015840VV 149 1198841015840119903 1980 1198731015840119903 minus741198841015840119903 0 1198831015840119903119903 minus108 1198841015840120575 448 1198731015840120575 minus1651198731015840V 0 1198831015840120575120575 minus105 1198841015840|V|V minus35 1198731015840|V|V 201198731015840119903 minus107 1198831015840V119903 minus237 1198841015840|V|119903 30 1198731015840|V|119903 minus991199091015840119866 3486 1198831015840V120575 172 1198841015840|119903|119903 679 1198731015840|119903|119903 minus171198981015840 1908 1198831015840119903120575 minus433 1198841015840V|119903| 158 1198731015840V|119903| minus431198681015840119911 119 11988310158400 minus48 1198841015840120575120575120575 minus94 1198731015840120575120575120575 22
1198841015840V120575120575 minus36 1198731015840V120575120575 171198841015840VV120575 minus73 1198731015840VV120575 121198841015840119903120575120575 minus23 1198731015840119903120575120575 221198841015840119903119903120575 134 1198731015840119903119903120575 minus401198841015840119903V120575 minus28 1198731015840119903V120575 3911988410158400 minus66 11987310158400 02
4 Example Study
The abovementioned measures on how to diminish the driftof hydrodynamic coefficients including difference methodand additional signal are employed in identifying a simplifiedAbkowitz model combined with free-running model tests ofaKVLCC2 SVMbased SI is used to obtain the hydrodynamiccoefficients The details of the mathematical model of shipmanoeuvring the SVM methodology the ship and themodel tests can be found in [24] and relevant literatureTable 5 lists the identification results of the hydrodynamiccoefficients in which the addedmasses and addedmoment ofinertia are calculated by slender-body theory as stated in Sec-tion 2 Based on the regression model 25∘5∘ zigzag manoeu-vring motion is simulated and the predicted results arecomparedwith the experimental results as shown in Figure 2Comparisons with the experimental results of other twomanoeuvres are presented in Figure 3 (20∘5∘ zigzagmanoeu-vre) and Figure 4 (20∘10∘ zigzag manoeuvre) respectivelyAs can be seen good agreement between prediction and
8 Mathematical Problems in Engineering
PredictionsExperiments
20 40 60 80 100 1200
20 40 60 80 100 1200
20 40 60 80 100 1200
20 40 60 80 100 1200Time (s)
minus500
50
051
15
u(m
s)
minus050
05
(m
s)
r(∘
s)
minus505
Heading (∘) and rudder angle (∘)
Figure 2 Prediction of 25∘5∘ zigzag manoeuvre of a KCLCC2 ship
PredictionsExperiments
05
1
15
u(m
s)
20 40 60 80 100 120 140 1600minus05
0
05
(m
s)
r(∘
s)
minus5
05
minus50
050
Heading (∘) and rudder angle (∘s)
20 40 60 80 100 120 140 1600
20 40 60 80 100 120 140 1600
20 40 60 80 100 120 140 1600Time (s)
Figure 3 Prediction of 20∘5∘ zigzag manoeuvre of a KCLCC2 ship
experiment is achieved It is owing not only to the use of SVMmethod a powerful modeling tool but also to the measurestaken to diminish the parameter drift
5 Conclusions
Parameter identifiability is an important issue for the SI appli-cation to the modeling of ship manoeuvring Some parame-ters in the manoeuvring model cannot be obtained using SIwhile some parameters deviate from true values even if theycan be derived Several measures are proposed to deal withthe problem of parameter identifiability and the validitiesare demonstrated by examples To determine the addedmasses and added moment of inertia slender-body theoryprovides a simple estimationmethod Todiminish the param-eter drift effect the mathematical model of ship manoeu-vring motion is simplified on the basis of regression analysis
PredictionsExperiments
r(∘
s)
Heading (∘) and rudder angle (∘s)
minus50
050
05
1
15
u(m
s)
minus05
0
05
(m
s)
minus5
05
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800Time (s)
Figure 4 Prediction of 20∘10∘ zigzagmanoeuvre of aKCLCC2 ship
difference of the samples and additional signal also take effectThese measures can be viewed as developed approaches thatare commonly used in regression analysis to diminish themulticollinearity For instance the simplification of a modelcan be viewed as a kind of pruning-variable method or PCRanalysis since the main components in the model remainedwhile some trivial variables are removed The additionalsignal method can be viewed as the opposition to pruning-variable method
Future work will be devoted to the study on a more accu-rate practical and universal estimation method for addedmasses and added moment of inertia since slender-bodymethod gives satisfactory results only for slender ships andldquomildrdquo manoeuvres Moreover how to design an appropriateadditional signal according to the characteristics of sampleswill be studied
Competing Interests
The author declares that they have no competing interests
Acknowledgments
This work was partially supported by the Special Item forUniversity in Fujian Province supported by the EducationDepartment (no JK15003) and the Special Item supportedby the Fujian Provincial Department of Ocean and Fisheries(no MHGX-16) The author is grateful to the Hamburg ShipModel Basin (HSVA) for providing the experimental data
References
[1] International Maritime Organization (IMO) ldquoStandards forship manoeuvrabilityrdquo Resolution MSC 137(76) 2002
Mathematical Problems in Engineering 9
[2] The Maneuvering Committee of ITTC ldquoFinal report andrecommendations to the 25th ITTCrdquo in Proceedings of the 25thInternational Towing Tank Conference pp 143ndash208 FukuokaJapan 2008
[3] G Rajesh and S K Bhattacharyya ldquoSystem identification fornonlinear maneuvering of large tankers using artificial neuralnetworkrdquo Applied Ocean Research vol 30 no 4 pp 256ndash2632008
[4] L Moreira and C Guedes Soares ldquoRecursive neural networkmodel of catamaran manoeuvringrdquo International Journal ofMaritime Engineering vol 154 pp A121ndashA130 2012
[5] W L Luo and Z J Zou ldquoBlind prediction of ship manoeuvringby using Support Vector Machinesrdquo in Proceedings of the the29th International Conference on Offshore Mechanics and ArcticEngineering (OMAE rsquo10) Shanghai China June 2010
[6] W Luo L Moreira and C Guedes Soares ldquoManoeuvringsimulation of catamaran by using implicit models based onsupport vector machinesrdquo Ocean Engineering vol 82 pp 150ndash159 2014
[7] T Holzhuter ldquoRobust identification in an adaptive track con-troller for shipsrdquo in Proceedings of the 3rd IFAC Symposium onAdaptive Systems in Control and Signal Processing pp 275ndash280Glasgow UK 1989
[8] R Munoz-Mansilla J Aranda J M Dıaz and J de la CruzldquoParametricmodel identification of high-speed craft dynamicsrdquoOcean Engineering vol 36 no 12-13 pp 1025ndash1038 2009
[9] M N Hayes Parameters identification of nonlinear stochasticsystems applied to ocean vehicle dynamics [PhD thesis] Mas-sachusetts Institute of Technology CambridgeMassUSA 1971
[10] J Van Amerongen ldquoAdaptive steering of ships-a model refer-ence approachrdquo Automatica vol 20 no 1 pp 3ndash14 1984
[11] M A Abkowitz ldquoMeasurement of hydrodynamic characteristicfrom shipmaneuvering trials by system identificationrdquoTransac-tions of Society of Naval Architects andMarine Engineers vol 88pp 283ndash318 1981
[12] L P Perera P Oliveira and C Guedes Soares ldquoSystemidentification of nonlinear vessel steeringrdquo Journal of OffshoreMechanics and Arctic Engineering vol 137 no 3 Article ID031302 pp 1ndash7 2015
[13] K J Astrom ldquoMaximum likelihood and prediction errormethodsrdquo Automatica vol 16 no 5 pp 551ndash574 1980
[14] C G Kallstrom and K J Astrom ldquoExperiences of systemidentification applied to ship steeringrdquo Automatica vol 17 no1 pp 187ndash198 1981
[15] W-W Zhou and M Blanke ldquoIdentification of a class ofnonlinear state-space models using RPE techniquesrdquo IEEETransactions on Automatic Control vol 34 no 3 pp 312ndash3161989
[16] E Revestido Herrero and F J Velasco Gonzalez ldquoTwo-stepidentification of non-linear manoeuvring models of marinevesselsrdquo Ocean Engineering vol 53 pp 72ndash82 2012
[17] R P Selvam S K Bhattacharyya andMHaddara ldquoA frequencydomain system identificationmethod for linear shipmaneuver-ingrdquo International Shipbuilding Progress vol 52 no 1 pp 5ndash272005
[18] S K Bhattacharyya andM R Haddara ldquoParametric identifica-tion for nonlinear ship maneuveringrdquo Journal of Ship Researchvol 50 no 3 pp 197ndash207 2006
[19] Y Chen Y Song and M Chen ldquoParameters identificationfor ship motion model based on particle swarm optimizationrdquoKybernetes vol 39 no 6 pp 871ndash880 2010
[20] Y T Dai L Q Liu and S S Feng ldquoOn the identification of cou-pled pitch and heave motions using opposition-based particleswarm optimizationrdquo Mathematical Problems in Engineeringvol 2014 Article ID 784049 10 pages 2014
[21] K-P Rhee S-Y Lee and Y-J Sung ldquoEstimation of manoeu-vring coefficients from PMM test by genetic algorithmrdquo inProceedings of the International Symposium and Workshop onForce Acting on aManoeuvringVessel Val de Reuil France 1998
[22] S Sutulo and C Guedes Soares ldquoAn algorithm for offlineidentification of ship manoeuvring mathematical models fromfree-running testsrdquo Ocean Engineering vol 79 pp 10ndash25 2014
[23] W L Luo and Z J Zou ldquoParametric identification of shipmaneuvering models by using support vector machinesrdquo Jour-nal of Ship Research vol 53 no 1 pp 19ndash30 2009
[24] W L Luo C Guedes Soares and Z J Zou ldquoParameteridentification of ship maneuvering model based on supportvector machines and particle swarm optimizationrdquo Journalof Offshore Mechanics and Arctic Engineering vol 138 no 3Article ID 031101 8 pages 2016
[25] W Y Hwang ldquoCancellation effect and parameter identifiabilityof ship steering dynamicsrdquo International Shipbuilding Progressvol 29 no 332 pp 90ndash120 1982
[26] C G Kallstrom ldquoIdentification and adaptive control applied toship steeringrdquo Tech Rep SSPAPUB-93 1982
[27] H D Nguyen ldquoRecursive identification of ship maneuveringdynamics and hydrodynamicsrdquo in Proceedings of the 36thEMAC Annual Conference pp C717ndashC732 Reykjavik Iceland2007
[28] F J Velasco I Zamanillo E Lopez and E Moyano ldquoParameterestimation of ship linear maneuvering modelsrdquo in Proceedingsof the OCEANS 2011 IEEE Santander Conference pp 1ndash8Santander Spain June 2011
[29] M R Haddara and Y Wang ldquoParametric identification ofmanoeuvring models for shipsrdquo International ShipbuildingProgress vol 46 no 445 pp 5ndash27 1999
[30] D Hess W Faller J Lee T Fu and E Ammeen ldquoShip maneu-vering simulation in wind and waves a nonlinear time-domainapproach using recursive neural networksrdquo in Proceedings of the26th Symposium on Naval Hydrodynamics Rome Italy 2006
[31] D Hess W Faller and J Lee ldquoReal-time nonlinear simulationof maneuvers for US navy combatant DTMB 5415rdquo in Pro-ceedings of the Workshop on Verification and Validation of ShipManeuvering Simulation Methods (SIMMAN rsquo08) pp E15ndashE21Copenhagen Denmark 2008
[32] M A Abkowitz ldquoLectures on ship hydrodynamicsmdashsteeringand manoeuvrabilityrdquo Tech Rep Hy-5 Hydro- and Aerody-namics Laboratory Lyngby Denmark 1964
[33] A Ogawa and H Kasai ldquoOn the mathematical model ofmanoeuvring motion of shipsrdquo International ShipbuildingProgress vol 25 no 292 pp 306ndash319 1978
[34] K Nomoto T Tagushi K Honda and S Hirano ldquoOn steeringqualities of shipsrdquo International Shipbuilding Progress vol 4 no35 pp 354ndash370 1957
[35] S Toxopeus ldquoValidation of slender-bodymethod for predictionof linear manoeuvring coefficients using experiments andviscous-flow calculationsrdquo in Proceedings of the 7th ICHDInternational Conference on Hydrodynamics (ICHD rsquo06) pp589ndash598 University of Naples ldquoFederico IIrdquo October 2006
[36] T-I Lee K-S Ahn H-S Lee and D-K Yum ldquoOn anempirical prediction of hydrodynamic coefficients for modernship hullsrdquo in Proceedings of the International Conference on
10 Mathematical Problems in Engineering
Marine Simulation and Ship Manoeuvrability (MARSIM rsquo03)Kanazawa Japan August 2003
[37] HNorrbinNils ldquoTheory and observations on the use of amath-ematical model for ship manoeuvring in deep and confinedwatersrdquo Report No SSPA-Pub-68 Swedish State ShipbuildingExperimental Tank Goteborg 1971
[38] R-C ZhuH-QGuo G-PMiao and J-W Yu ldquoComputationalmethod for evaluation of addedmass anddamping of ship basedon CFD theoryrdquo Journal of Shanghai Jiaotong University vol 43no 2 pp 198ndash203 2009
[39] J N NewmanMarine Hydrodynamics MIT Press CambridgeMass USA 1977
[40] M S Chislett and J Strom-Tejsen ldquoPlanar motion mechanismtests and full-scale steering and maneuvering predictions for aMariner class vesselrdquo International Shipbuilding Progress vol 12pp 201ndash224 1965
[41] M Z Fabrycy ldquoMulticollinearity caused by specificationerrorsrdquo Applied Statistics vol 24 no 2 pp 250ndash254 1975
[42] W L LuoOn themodeling of shipmanoeuvring by using supportvector machines [PhD thesis] Shanghai Jiao Tong UniversityShanghai China 2009
[43] S S Bowles and H M Levin ldquoMore on multicollinearity andthe effectiveness of schoolsrdquo The Journal of Human Resourcesvol 3 no 3 pp 393ndash400 1968
[44] I Jolliffe Principal Component Analysis John Wiley amp Sons2002
[45] SWold A Ruhe HWold andW J Dunn III ldquoThe collinearityproblem in linear regression The Partial Least Squares (PLS)approach to generalized inversesrdquo SIAM Journal on Scientificand Statistical Computing vol 5 no 3 pp 735ndash743 1984
[46] A G Ivakhnenko and J A Muller ldquoPresent state and newproblems of further GMDH developmentrdquo Systems AnalysisModeling Simulation vol 20 pp 3ndash16 1995
[47] H K Yoon and K P Rhee ldquoIdentification of hydrodynamiccoefficients in ship maneuvering equations of motion byEstimation-Before-Modeling techniquerdquo Ocean Engineeringvol 30 no 18 pp 2379ndash2404 2003
[48] S M Yeon D J Yeo and K P Rhee ldquoOptimal input designfor the identification of low-speed manoeuvring mathemati-cal modelrdquo in Proceedings of the International Conference onMarine Simulation and Ship Manoeuvrability (MARSIM rsquo06)Terschelling The Netherlands June 2006
[49] W Y HwangApplication of system identification to ship maneu-vering [PhD thesis] Massachusetts Institute of TechnologyCambridge Mass USA 1980
[50] K P Rhee and K Kim ldquoA new sea trial method for estimatinghydrodynamic derivativesrdquo Ship Ocean Technology vol 3 no 3pp 25ndash44 1999
[51] M Viviani R Depascale L Sebastiani C Podenzana Bon-vino R Dattola and M Soave ldquoAlternative methods forthe identification of hydrodynamic derivatives from standardmanoeuvresrdquo in Proceedings of the International Conference onMarine Simulation and Ship Manoeuvrability (MARSIM rsquo03)Kanazawa Japan August 2003
[52] W-L Luo and Z-J Zou ldquoElimination of simultaneous driftand sensitivity analysis in the hydrodynamic modeling of shipmanoeuvringrdquo Journal of Shanghai Jiaotong University vol 42no 8 pp 1358ndash1362 2008
[53] R R Shenoi P Krishnankutty and R P Selvam ldquoSensitivitystudy of hydrodynamic derivative variations on the maneu-verability prediction of a container shiprdquo in Proceedings of the
ASME 34th International Conference on Ocean Offshore andArctic Engineering (OMAE rsquo15) American Society ofMechanicalEngineers June 2015
[54] W L Luo and Z J Zou ldquoAnalysis of captive model obliquetowing test by using least squares support vector machinesrdquoShipbuilding of China vol 51 no 2 pp 10ndash14 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
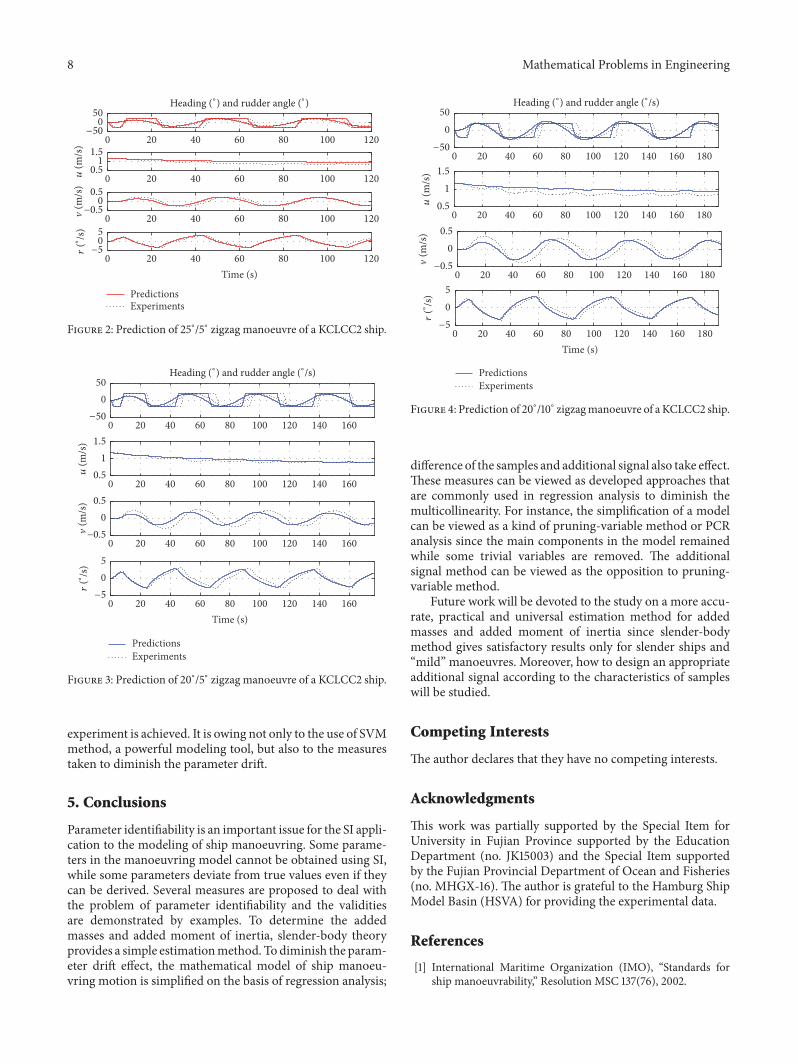
8 Mathematical Problems in Engineering
PredictionsExperiments
20 40 60 80 100 1200
20 40 60 80 100 1200
20 40 60 80 100 1200
20 40 60 80 100 1200Time (s)
minus500
50
051
15
u(m
s)
minus050
05
(m
s)
r(∘
s)
minus505
Heading (∘) and rudder angle (∘)
Figure 2 Prediction of 25∘5∘ zigzag manoeuvre of a KCLCC2 ship
PredictionsExperiments
05
1
15
u(m
s)
20 40 60 80 100 120 140 1600minus05
0
05
(m
s)
r(∘
s)
minus5
05
minus50
050
Heading (∘) and rudder angle (∘s)
20 40 60 80 100 120 140 1600
20 40 60 80 100 120 140 1600
20 40 60 80 100 120 140 1600Time (s)
Figure 3 Prediction of 20∘5∘ zigzag manoeuvre of a KCLCC2 ship
experiment is achieved It is owing not only to the use of SVMmethod a powerful modeling tool but also to the measurestaken to diminish the parameter drift
5 Conclusions
Parameter identifiability is an important issue for the SI appli-cation to the modeling of ship manoeuvring Some parame-ters in the manoeuvring model cannot be obtained using SIwhile some parameters deviate from true values even if theycan be derived Several measures are proposed to deal withthe problem of parameter identifiability and the validitiesare demonstrated by examples To determine the addedmasses and added moment of inertia slender-body theoryprovides a simple estimationmethod Todiminish the param-eter drift effect the mathematical model of ship manoeu-vring motion is simplified on the basis of regression analysis
PredictionsExperiments
r(∘
s)
Heading (∘) and rudder angle (∘s)
minus50
050
05
1
15
u(m
s)
minus05
0
05
(m
s)
minus5
05
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800
20 40 60 80 100 120 140 160 1800Time (s)
Figure 4 Prediction of 20∘10∘ zigzagmanoeuvre of aKCLCC2 ship
difference of the samples and additional signal also take effectThese measures can be viewed as developed approaches thatare commonly used in regression analysis to diminish themulticollinearity For instance the simplification of a modelcan be viewed as a kind of pruning-variable method or PCRanalysis since the main components in the model remainedwhile some trivial variables are removed The additionalsignal method can be viewed as the opposition to pruning-variable method
Future work will be devoted to the study on a more accu-rate practical and universal estimation method for addedmasses and added moment of inertia since slender-bodymethod gives satisfactory results only for slender ships andldquomildrdquo manoeuvres Moreover how to design an appropriateadditional signal according to the characteristics of sampleswill be studied
Competing Interests
The author declares that they have no competing interests
Acknowledgments
This work was partially supported by the Special Item forUniversity in Fujian Province supported by the EducationDepartment (no JK15003) and the Special Item supportedby the Fujian Provincial Department of Ocean and Fisheries(no MHGX-16) The author is grateful to the Hamburg ShipModel Basin (HSVA) for providing the experimental data
References
[1] International Maritime Organization (IMO) ldquoStandards forship manoeuvrabilityrdquo Resolution MSC 137(76) 2002
Mathematical Problems in Engineering 9
[2] The Maneuvering Committee of ITTC ldquoFinal report andrecommendations to the 25th ITTCrdquo in Proceedings of the 25thInternational Towing Tank Conference pp 143ndash208 FukuokaJapan 2008
[3] G Rajesh and S K Bhattacharyya ldquoSystem identification fornonlinear maneuvering of large tankers using artificial neuralnetworkrdquo Applied Ocean Research vol 30 no 4 pp 256ndash2632008
[4] L Moreira and C Guedes Soares ldquoRecursive neural networkmodel of catamaran manoeuvringrdquo International Journal ofMaritime Engineering vol 154 pp A121ndashA130 2012
[5] W L Luo and Z J Zou ldquoBlind prediction of ship manoeuvringby using Support Vector Machinesrdquo in Proceedings of the the29th International Conference on Offshore Mechanics and ArcticEngineering (OMAE rsquo10) Shanghai China June 2010
[6] W Luo L Moreira and C Guedes Soares ldquoManoeuvringsimulation of catamaran by using implicit models based onsupport vector machinesrdquo Ocean Engineering vol 82 pp 150ndash159 2014
[7] T Holzhuter ldquoRobust identification in an adaptive track con-troller for shipsrdquo in Proceedings of the 3rd IFAC Symposium onAdaptive Systems in Control and Signal Processing pp 275ndash280Glasgow UK 1989
[8] R Munoz-Mansilla J Aranda J M Dıaz and J de la CruzldquoParametricmodel identification of high-speed craft dynamicsrdquoOcean Engineering vol 36 no 12-13 pp 1025ndash1038 2009
[9] M N Hayes Parameters identification of nonlinear stochasticsystems applied to ocean vehicle dynamics [PhD thesis] Mas-sachusetts Institute of Technology CambridgeMassUSA 1971
[10] J Van Amerongen ldquoAdaptive steering of ships-a model refer-ence approachrdquo Automatica vol 20 no 1 pp 3ndash14 1984
[11] M A Abkowitz ldquoMeasurement of hydrodynamic characteristicfrom shipmaneuvering trials by system identificationrdquoTransac-tions of Society of Naval Architects andMarine Engineers vol 88pp 283ndash318 1981
[12] L P Perera P Oliveira and C Guedes Soares ldquoSystemidentification of nonlinear vessel steeringrdquo Journal of OffshoreMechanics and Arctic Engineering vol 137 no 3 Article ID031302 pp 1ndash7 2015
[13] K J Astrom ldquoMaximum likelihood and prediction errormethodsrdquo Automatica vol 16 no 5 pp 551ndash574 1980
[14] C G Kallstrom and K J Astrom ldquoExperiences of systemidentification applied to ship steeringrdquo Automatica vol 17 no1 pp 187ndash198 1981
[15] W-W Zhou and M Blanke ldquoIdentification of a class ofnonlinear state-space models using RPE techniquesrdquo IEEETransactions on Automatic Control vol 34 no 3 pp 312ndash3161989
[16] E Revestido Herrero and F J Velasco Gonzalez ldquoTwo-stepidentification of non-linear manoeuvring models of marinevesselsrdquo Ocean Engineering vol 53 pp 72ndash82 2012
[17] R P Selvam S K Bhattacharyya andMHaddara ldquoA frequencydomain system identificationmethod for linear shipmaneuver-ingrdquo International Shipbuilding Progress vol 52 no 1 pp 5ndash272005
[18] S K Bhattacharyya andM R Haddara ldquoParametric identifica-tion for nonlinear ship maneuveringrdquo Journal of Ship Researchvol 50 no 3 pp 197ndash207 2006
[19] Y Chen Y Song and M Chen ldquoParameters identificationfor ship motion model based on particle swarm optimizationrdquoKybernetes vol 39 no 6 pp 871ndash880 2010
[20] Y T Dai L Q Liu and S S Feng ldquoOn the identification of cou-pled pitch and heave motions using opposition-based particleswarm optimizationrdquo Mathematical Problems in Engineeringvol 2014 Article ID 784049 10 pages 2014
[21] K-P Rhee S-Y Lee and Y-J Sung ldquoEstimation of manoeu-vring coefficients from PMM test by genetic algorithmrdquo inProceedings of the International Symposium and Workshop onForce Acting on aManoeuvringVessel Val de Reuil France 1998
[22] S Sutulo and C Guedes Soares ldquoAn algorithm for offlineidentification of ship manoeuvring mathematical models fromfree-running testsrdquo Ocean Engineering vol 79 pp 10ndash25 2014
[23] W L Luo and Z J Zou ldquoParametric identification of shipmaneuvering models by using support vector machinesrdquo Jour-nal of Ship Research vol 53 no 1 pp 19ndash30 2009
[24] W L Luo C Guedes Soares and Z J Zou ldquoParameteridentification of ship maneuvering model based on supportvector machines and particle swarm optimizationrdquo Journalof Offshore Mechanics and Arctic Engineering vol 138 no 3Article ID 031101 8 pages 2016
[25] W Y Hwang ldquoCancellation effect and parameter identifiabilityof ship steering dynamicsrdquo International Shipbuilding Progressvol 29 no 332 pp 90ndash120 1982
[26] C G Kallstrom ldquoIdentification and adaptive control applied toship steeringrdquo Tech Rep SSPAPUB-93 1982
[27] H D Nguyen ldquoRecursive identification of ship maneuveringdynamics and hydrodynamicsrdquo in Proceedings of the 36thEMAC Annual Conference pp C717ndashC732 Reykjavik Iceland2007
[28] F J Velasco I Zamanillo E Lopez and E Moyano ldquoParameterestimation of ship linear maneuvering modelsrdquo in Proceedingsof the OCEANS 2011 IEEE Santander Conference pp 1ndash8Santander Spain June 2011
[29] M R Haddara and Y Wang ldquoParametric identification ofmanoeuvring models for shipsrdquo International ShipbuildingProgress vol 46 no 445 pp 5ndash27 1999
[30] D Hess W Faller J Lee T Fu and E Ammeen ldquoShip maneu-vering simulation in wind and waves a nonlinear time-domainapproach using recursive neural networksrdquo in Proceedings of the26th Symposium on Naval Hydrodynamics Rome Italy 2006
[31] D Hess W Faller and J Lee ldquoReal-time nonlinear simulationof maneuvers for US navy combatant DTMB 5415rdquo in Pro-ceedings of the Workshop on Verification and Validation of ShipManeuvering Simulation Methods (SIMMAN rsquo08) pp E15ndashE21Copenhagen Denmark 2008
[32] M A Abkowitz ldquoLectures on ship hydrodynamicsmdashsteeringand manoeuvrabilityrdquo Tech Rep Hy-5 Hydro- and Aerody-namics Laboratory Lyngby Denmark 1964
[33] A Ogawa and H Kasai ldquoOn the mathematical model ofmanoeuvring motion of shipsrdquo International ShipbuildingProgress vol 25 no 292 pp 306ndash319 1978
[34] K Nomoto T Tagushi K Honda and S Hirano ldquoOn steeringqualities of shipsrdquo International Shipbuilding Progress vol 4 no35 pp 354ndash370 1957
[35] S Toxopeus ldquoValidation of slender-bodymethod for predictionof linear manoeuvring coefficients using experiments andviscous-flow calculationsrdquo in Proceedings of the 7th ICHDInternational Conference on Hydrodynamics (ICHD rsquo06) pp589ndash598 University of Naples ldquoFederico IIrdquo October 2006
[36] T-I Lee K-S Ahn H-S Lee and D-K Yum ldquoOn anempirical prediction of hydrodynamic coefficients for modernship hullsrdquo in Proceedings of the International Conference on
10 Mathematical Problems in Engineering
Marine Simulation and Ship Manoeuvrability (MARSIM rsquo03)Kanazawa Japan August 2003
[37] HNorrbinNils ldquoTheory and observations on the use of amath-ematical model for ship manoeuvring in deep and confinedwatersrdquo Report No SSPA-Pub-68 Swedish State ShipbuildingExperimental Tank Goteborg 1971
[38] R-C ZhuH-QGuo G-PMiao and J-W Yu ldquoComputationalmethod for evaluation of addedmass anddamping of ship basedon CFD theoryrdquo Journal of Shanghai Jiaotong University vol 43no 2 pp 198ndash203 2009
[39] J N NewmanMarine Hydrodynamics MIT Press CambridgeMass USA 1977
[40] M S Chislett and J Strom-Tejsen ldquoPlanar motion mechanismtests and full-scale steering and maneuvering predictions for aMariner class vesselrdquo International Shipbuilding Progress vol 12pp 201ndash224 1965
[41] M Z Fabrycy ldquoMulticollinearity caused by specificationerrorsrdquo Applied Statistics vol 24 no 2 pp 250ndash254 1975
[42] W L LuoOn themodeling of shipmanoeuvring by using supportvector machines [PhD thesis] Shanghai Jiao Tong UniversityShanghai China 2009
[43] S S Bowles and H M Levin ldquoMore on multicollinearity andthe effectiveness of schoolsrdquo The Journal of Human Resourcesvol 3 no 3 pp 393ndash400 1968
[44] I Jolliffe Principal Component Analysis John Wiley amp Sons2002
[45] SWold A Ruhe HWold andW J Dunn III ldquoThe collinearityproblem in linear regression The Partial Least Squares (PLS)approach to generalized inversesrdquo SIAM Journal on Scientificand Statistical Computing vol 5 no 3 pp 735ndash743 1984
[46] A G Ivakhnenko and J A Muller ldquoPresent state and newproblems of further GMDH developmentrdquo Systems AnalysisModeling Simulation vol 20 pp 3ndash16 1995
[47] H K Yoon and K P Rhee ldquoIdentification of hydrodynamiccoefficients in ship maneuvering equations of motion byEstimation-Before-Modeling techniquerdquo Ocean Engineeringvol 30 no 18 pp 2379ndash2404 2003
[48] S M Yeon D J Yeo and K P Rhee ldquoOptimal input designfor the identification of low-speed manoeuvring mathemati-cal modelrdquo in Proceedings of the International Conference onMarine Simulation and Ship Manoeuvrability (MARSIM rsquo06)Terschelling The Netherlands June 2006
[49] W Y HwangApplication of system identification to ship maneu-vering [PhD thesis] Massachusetts Institute of TechnologyCambridge Mass USA 1980
[50] K P Rhee and K Kim ldquoA new sea trial method for estimatinghydrodynamic derivativesrdquo Ship Ocean Technology vol 3 no 3pp 25ndash44 1999
[51] M Viviani R Depascale L Sebastiani C Podenzana Bon-vino R Dattola and M Soave ldquoAlternative methods forthe identification of hydrodynamic derivatives from standardmanoeuvresrdquo in Proceedings of the International Conference onMarine Simulation and Ship Manoeuvrability (MARSIM rsquo03)Kanazawa Japan August 2003
[52] W-L Luo and Z-J Zou ldquoElimination of simultaneous driftand sensitivity analysis in the hydrodynamic modeling of shipmanoeuvringrdquo Journal of Shanghai Jiaotong University vol 42no 8 pp 1358ndash1362 2008
[53] R R Shenoi P Krishnankutty and R P Selvam ldquoSensitivitystudy of hydrodynamic derivative variations on the maneu-verability prediction of a container shiprdquo in Proceedings of the
ASME 34th International Conference on Ocean Offshore andArctic Engineering (OMAE rsquo15) American Society ofMechanicalEngineers June 2015
[54] W L Luo and Z J Zou ldquoAnalysis of captive model obliquetowing test by using least squares support vector machinesrdquoShipbuilding of China vol 51 no 2 pp 10ndash14 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
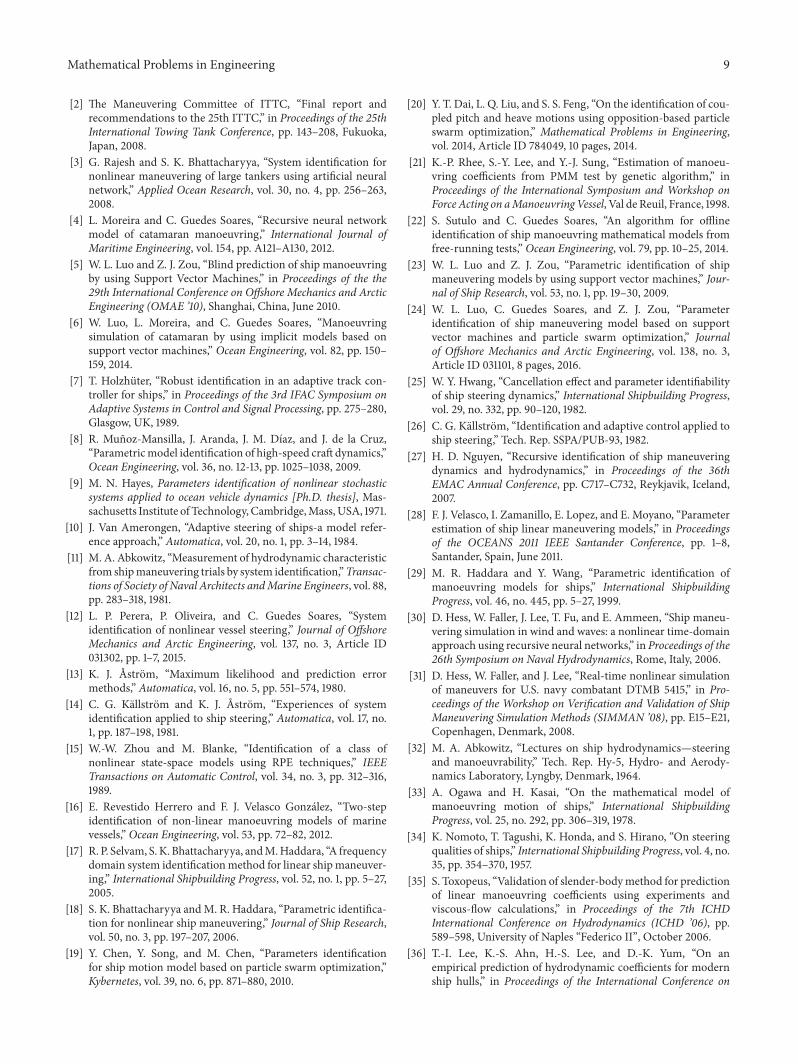
Mathematical Problems in Engineering 9
[2] The Maneuvering Committee of ITTC ldquoFinal report andrecommendations to the 25th ITTCrdquo in Proceedings of the 25thInternational Towing Tank Conference pp 143ndash208 FukuokaJapan 2008
[3] G Rajesh and S K Bhattacharyya ldquoSystem identification fornonlinear maneuvering of large tankers using artificial neuralnetworkrdquo Applied Ocean Research vol 30 no 4 pp 256ndash2632008
[4] L Moreira and C Guedes Soares ldquoRecursive neural networkmodel of catamaran manoeuvringrdquo International Journal ofMaritime Engineering vol 154 pp A121ndashA130 2012
[5] W L Luo and Z J Zou ldquoBlind prediction of ship manoeuvringby using Support Vector Machinesrdquo in Proceedings of the the29th International Conference on Offshore Mechanics and ArcticEngineering (OMAE rsquo10) Shanghai China June 2010
[6] W Luo L Moreira and C Guedes Soares ldquoManoeuvringsimulation of catamaran by using implicit models based onsupport vector machinesrdquo Ocean Engineering vol 82 pp 150ndash159 2014
[7] T Holzhuter ldquoRobust identification in an adaptive track con-troller for shipsrdquo in Proceedings of the 3rd IFAC Symposium onAdaptive Systems in Control and Signal Processing pp 275ndash280Glasgow UK 1989
[8] R Munoz-Mansilla J Aranda J M Dıaz and J de la CruzldquoParametricmodel identification of high-speed craft dynamicsrdquoOcean Engineering vol 36 no 12-13 pp 1025ndash1038 2009
[9] M N Hayes Parameters identification of nonlinear stochasticsystems applied to ocean vehicle dynamics [PhD thesis] Mas-sachusetts Institute of Technology CambridgeMassUSA 1971
[10] J Van Amerongen ldquoAdaptive steering of ships-a model refer-ence approachrdquo Automatica vol 20 no 1 pp 3ndash14 1984
[11] M A Abkowitz ldquoMeasurement of hydrodynamic characteristicfrom shipmaneuvering trials by system identificationrdquoTransac-tions of Society of Naval Architects andMarine Engineers vol 88pp 283ndash318 1981
[12] L P Perera P Oliveira and C Guedes Soares ldquoSystemidentification of nonlinear vessel steeringrdquo Journal of OffshoreMechanics and Arctic Engineering vol 137 no 3 Article ID031302 pp 1ndash7 2015
[13] K J Astrom ldquoMaximum likelihood and prediction errormethodsrdquo Automatica vol 16 no 5 pp 551ndash574 1980
[14] C G Kallstrom and K J Astrom ldquoExperiences of systemidentification applied to ship steeringrdquo Automatica vol 17 no1 pp 187ndash198 1981
[15] W-W Zhou and M Blanke ldquoIdentification of a class ofnonlinear state-space models using RPE techniquesrdquo IEEETransactions on Automatic Control vol 34 no 3 pp 312ndash3161989
[16] E Revestido Herrero and F J Velasco Gonzalez ldquoTwo-stepidentification of non-linear manoeuvring models of marinevesselsrdquo Ocean Engineering vol 53 pp 72ndash82 2012
[17] R P Selvam S K Bhattacharyya andMHaddara ldquoA frequencydomain system identificationmethod for linear shipmaneuver-ingrdquo International Shipbuilding Progress vol 52 no 1 pp 5ndash272005
[18] S K Bhattacharyya andM R Haddara ldquoParametric identifica-tion for nonlinear ship maneuveringrdquo Journal of Ship Researchvol 50 no 3 pp 197ndash207 2006
[19] Y Chen Y Song and M Chen ldquoParameters identificationfor ship motion model based on particle swarm optimizationrdquoKybernetes vol 39 no 6 pp 871ndash880 2010
[20] Y T Dai L Q Liu and S S Feng ldquoOn the identification of cou-pled pitch and heave motions using opposition-based particleswarm optimizationrdquo Mathematical Problems in Engineeringvol 2014 Article ID 784049 10 pages 2014
[21] K-P Rhee S-Y Lee and Y-J Sung ldquoEstimation of manoeu-vring coefficients from PMM test by genetic algorithmrdquo inProceedings of the International Symposium and Workshop onForce Acting on aManoeuvringVessel Val de Reuil France 1998
[22] S Sutulo and C Guedes Soares ldquoAn algorithm for offlineidentification of ship manoeuvring mathematical models fromfree-running testsrdquo Ocean Engineering vol 79 pp 10ndash25 2014
[23] W L Luo and Z J Zou ldquoParametric identification of shipmaneuvering models by using support vector machinesrdquo Jour-nal of Ship Research vol 53 no 1 pp 19ndash30 2009
[24] W L Luo C Guedes Soares and Z J Zou ldquoParameteridentification of ship maneuvering model based on supportvector machines and particle swarm optimizationrdquo Journalof Offshore Mechanics and Arctic Engineering vol 138 no 3Article ID 031101 8 pages 2016
[25] W Y Hwang ldquoCancellation effect and parameter identifiabilityof ship steering dynamicsrdquo International Shipbuilding Progressvol 29 no 332 pp 90ndash120 1982
[26] C G Kallstrom ldquoIdentification and adaptive control applied toship steeringrdquo Tech Rep SSPAPUB-93 1982
[27] H D Nguyen ldquoRecursive identification of ship maneuveringdynamics and hydrodynamicsrdquo in Proceedings of the 36thEMAC Annual Conference pp C717ndashC732 Reykjavik Iceland2007
[28] F J Velasco I Zamanillo E Lopez and E Moyano ldquoParameterestimation of ship linear maneuvering modelsrdquo in Proceedingsof the OCEANS 2011 IEEE Santander Conference pp 1ndash8Santander Spain June 2011
[29] M R Haddara and Y Wang ldquoParametric identification ofmanoeuvring models for shipsrdquo International ShipbuildingProgress vol 46 no 445 pp 5ndash27 1999
[30] D Hess W Faller J Lee T Fu and E Ammeen ldquoShip maneu-vering simulation in wind and waves a nonlinear time-domainapproach using recursive neural networksrdquo in Proceedings of the26th Symposium on Naval Hydrodynamics Rome Italy 2006
[31] D Hess W Faller and J Lee ldquoReal-time nonlinear simulationof maneuvers for US navy combatant DTMB 5415rdquo in Pro-ceedings of the Workshop on Verification and Validation of ShipManeuvering Simulation Methods (SIMMAN rsquo08) pp E15ndashE21Copenhagen Denmark 2008
[32] M A Abkowitz ldquoLectures on ship hydrodynamicsmdashsteeringand manoeuvrabilityrdquo Tech Rep Hy-5 Hydro- and Aerody-namics Laboratory Lyngby Denmark 1964
[33] A Ogawa and H Kasai ldquoOn the mathematical model ofmanoeuvring motion of shipsrdquo International ShipbuildingProgress vol 25 no 292 pp 306ndash319 1978
[34] K Nomoto T Tagushi K Honda and S Hirano ldquoOn steeringqualities of shipsrdquo International Shipbuilding Progress vol 4 no35 pp 354ndash370 1957
[35] S Toxopeus ldquoValidation of slender-bodymethod for predictionof linear manoeuvring coefficients using experiments andviscous-flow calculationsrdquo in Proceedings of the 7th ICHDInternational Conference on Hydrodynamics (ICHD rsquo06) pp589ndash598 University of Naples ldquoFederico IIrdquo October 2006
[36] T-I Lee K-S Ahn H-S Lee and D-K Yum ldquoOn anempirical prediction of hydrodynamic coefficients for modernship hullsrdquo in Proceedings of the International Conference on
10 Mathematical Problems in Engineering
Marine Simulation and Ship Manoeuvrability (MARSIM rsquo03)Kanazawa Japan August 2003
[37] HNorrbinNils ldquoTheory and observations on the use of amath-ematical model for ship manoeuvring in deep and confinedwatersrdquo Report No SSPA-Pub-68 Swedish State ShipbuildingExperimental Tank Goteborg 1971
[38] R-C ZhuH-QGuo G-PMiao and J-W Yu ldquoComputationalmethod for evaluation of addedmass anddamping of ship basedon CFD theoryrdquo Journal of Shanghai Jiaotong University vol 43no 2 pp 198ndash203 2009
[39] J N NewmanMarine Hydrodynamics MIT Press CambridgeMass USA 1977
[40] M S Chislett and J Strom-Tejsen ldquoPlanar motion mechanismtests and full-scale steering and maneuvering predictions for aMariner class vesselrdquo International Shipbuilding Progress vol 12pp 201ndash224 1965
[41] M Z Fabrycy ldquoMulticollinearity caused by specificationerrorsrdquo Applied Statistics vol 24 no 2 pp 250ndash254 1975
[42] W L LuoOn themodeling of shipmanoeuvring by using supportvector machines [PhD thesis] Shanghai Jiao Tong UniversityShanghai China 2009
[43] S S Bowles and H M Levin ldquoMore on multicollinearity andthe effectiveness of schoolsrdquo The Journal of Human Resourcesvol 3 no 3 pp 393ndash400 1968
[44] I Jolliffe Principal Component Analysis John Wiley amp Sons2002
[45] SWold A Ruhe HWold andW J Dunn III ldquoThe collinearityproblem in linear regression The Partial Least Squares (PLS)approach to generalized inversesrdquo SIAM Journal on Scientificand Statistical Computing vol 5 no 3 pp 735ndash743 1984
[46] A G Ivakhnenko and J A Muller ldquoPresent state and newproblems of further GMDH developmentrdquo Systems AnalysisModeling Simulation vol 20 pp 3ndash16 1995
[47] H K Yoon and K P Rhee ldquoIdentification of hydrodynamiccoefficients in ship maneuvering equations of motion byEstimation-Before-Modeling techniquerdquo Ocean Engineeringvol 30 no 18 pp 2379ndash2404 2003
[48] S M Yeon D J Yeo and K P Rhee ldquoOptimal input designfor the identification of low-speed manoeuvring mathemati-cal modelrdquo in Proceedings of the International Conference onMarine Simulation and Ship Manoeuvrability (MARSIM rsquo06)Terschelling The Netherlands June 2006
[49] W Y HwangApplication of system identification to ship maneu-vering [PhD thesis] Massachusetts Institute of TechnologyCambridge Mass USA 1980
[50] K P Rhee and K Kim ldquoA new sea trial method for estimatinghydrodynamic derivativesrdquo Ship Ocean Technology vol 3 no 3pp 25ndash44 1999
[51] M Viviani R Depascale L Sebastiani C Podenzana Bon-vino R Dattola and M Soave ldquoAlternative methods forthe identification of hydrodynamic derivatives from standardmanoeuvresrdquo in Proceedings of the International Conference onMarine Simulation and Ship Manoeuvrability (MARSIM rsquo03)Kanazawa Japan August 2003
[52] W-L Luo and Z-J Zou ldquoElimination of simultaneous driftand sensitivity analysis in the hydrodynamic modeling of shipmanoeuvringrdquo Journal of Shanghai Jiaotong University vol 42no 8 pp 1358ndash1362 2008
[53] R R Shenoi P Krishnankutty and R P Selvam ldquoSensitivitystudy of hydrodynamic derivative variations on the maneu-verability prediction of a container shiprdquo in Proceedings of the
ASME 34th International Conference on Ocean Offshore andArctic Engineering (OMAE rsquo15) American Society ofMechanicalEngineers June 2015
[54] W L Luo and Z J Zou ldquoAnalysis of captive model obliquetowing test by using least squares support vector machinesrdquoShipbuilding of China vol 51 no 2 pp 10ndash14 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
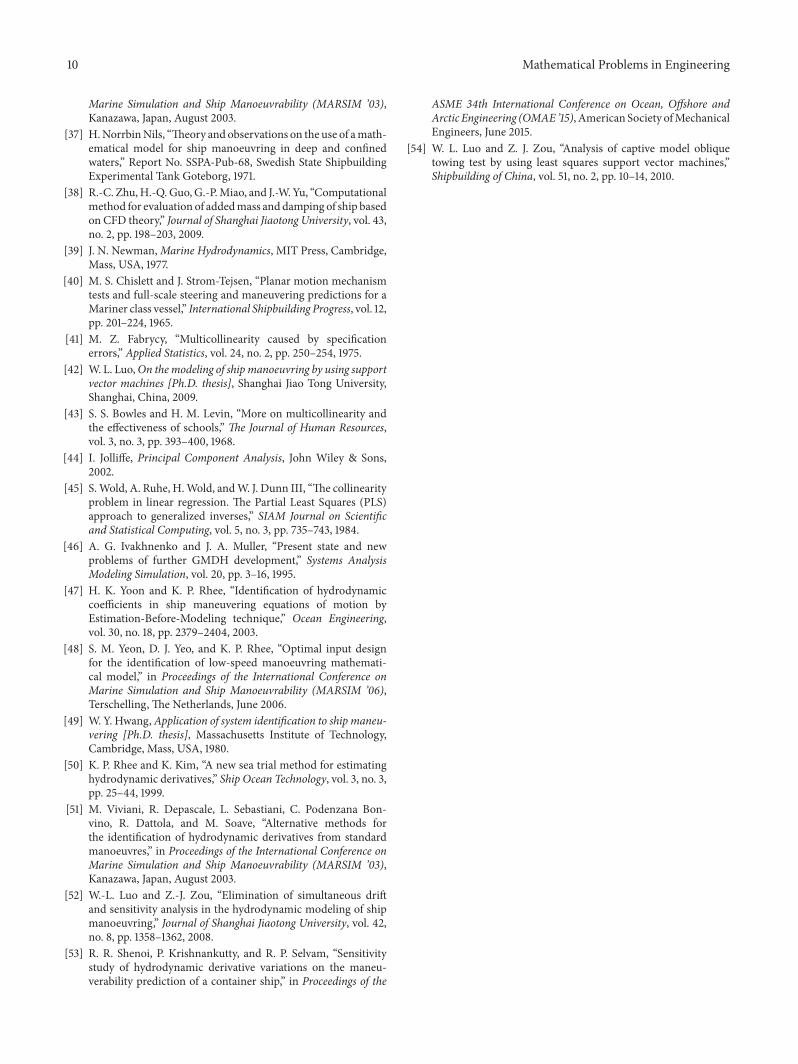
10 Mathematical Problems in Engineering
Marine Simulation and Ship Manoeuvrability (MARSIM rsquo03)Kanazawa Japan August 2003
[37] HNorrbinNils ldquoTheory and observations on the use of amath-ematical model for ship manoeuvring in deep and confinedwatersrdquo Report No SSPA-Pub-68 Swedish State ShipbuildingExperimental Tank Goteborg 1971
[38] R-C ZhuH-QGuo G-PMiao and J-W Yu ldquoComputationalmethod for evaluation of addedmass anddamping of ship basedon CFD theoryrdquo Journal of Shanghai Jiaotong University vol 43no 2 pp 198ndash203 2009
[39] J N NewmanMarine Hydrodynamics MIT Press CambridgeMass USA 1977
[40] M S Chislett and J Strom-Tejsen ldquoPlanar motion mechanismtests and full-scale steering and maneuvering predictions for aMariner class vesselrdquo International Shipbuilding Progress vol 12pp 201ndash224 1965
[41] M Z Fabrycy ldquoMulticollinearity caused by specificationerrorsrdquo Applied Statistics vol 24 no 2 pp 250ndash254 1975
[42] W L LuoOn themodeling of shipmanoeuvring by using supportvector machines [PhD thesis] Shanghai Jiao Tong UniversityShanghai China 2009
[43] S S Bowles and H M Levin ldquoMore on multicollinearity andthe effectiveness of schoolsrdquo The Journal of Human Resourcesvol 3 no 3 pp 393ndash400 1968
[44] I Jolliffe Principal Component Analysis John Wiley amp Sons2002
[45] SWold A Ruhe HWold andW J Dunn III ldquoThe collinearityproblem in linear regression The Partial Least Squares (PLS)approach to generalized inversesrdquo SIAM Journal on Scientificand Statistical Computing vol 5 no 3 pp 735ndash743 1984
[46] A G Ivakhnenko and J A Muller ldquoPresent state and newproblems of further GMDH developmentrdquo Systems AnalysisModeling Simulation vol 20 pp 3ndash16 1995
[47] H K Yoon and K P Rhee ldquoIdentification of hydrodynamiccoefficients in ship maneuvering equations of motion byEstimation-Before-Modeling techniquerdquo Ocean Engineeringvol 30 no 18 pp 2379ndash2404 2003
[48] S M Yeon D J Yeo and K P Rhee ldquoOptimal input designfor the identification of low-speed manoeuvring mathemati-cal modelrdquo in Proceedings of the International Conference onMarine Simulation and Ship Manoeuvrability (MARSIM rsquo06)Terschelling The Netherlands June 2006
[49] W Y HwangApplication of system identification to ship maneu-vering [PhD thesis] Massachusetts Institute of TechnologyCambridge Mass USA 1980
[50] K P Rhee and K Kim ldquoA new sea trial method for estimatinghydrodynamic derivativesrdquo Ship Ocean Technology vol 3 no 3pp 25ndash44 1999
[51] M Viviani R Depascale L Sebastiani C Podenzana Bon-vino R Dattola and M Soave ldquoAlternative methods forthe identification of hydrodynamic derivatives from standardmanoeuvresrdquo in Proceedings of the International Conference onMarine Simulation and Ship Manoeuvrability (MARSIM rsquo03)Kanazawa Japan August 2003
[52] W-L Luo and Z-J Zou ldquoElimination of simultaneous driftand sensitivity analysis in the hydrodynamic modeling of shipmanoeuvringrdquo Journal of Shanghai Jiaotong University vol 42no 8 pp 1358ndash1362 2008
[53] R R Shenoi P Krishnankutty and R P Selvam ldquoSensitivitystudy of hydrodynamic derivative variations on the maneu-verability prediction of a container shiprdquo in Proceedings of the
ASME 34th International Conference on Ocean Offshore andArctic Engineering (OMAE rsquo15) American Society ofMechanicalEngineers June 2015
[54] W L Luo and Z J Zou ldquoAnalysis of captive model obliquetowing test by using least squares support vector machinesrdquoShipbuilding of China vol 51 no 2 pp 10ndash14 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of