proect i8088
TRANSCRIPT

Coala
Mod Coala Nr. Document Semnăt. Data
Introducere
În cadrul proiectului dat vom proiecta un dispozitiv pe baza microprocesorului Intel i8088 sau analogul sau rus K1810BM88.
Dispozitivul reprezintă un bloc functional pe bază de microprocesor, cu memorie RAM/ROM si periferie - o tastieră cu 64 de taste. Scopul principal al proiectării este de crea o cale de conexiune între tastatură şi microprocesor, necesară evident pentru introducerea a diferitor date şi comenzi propuse procesorului pentru prelucrare. La formarea acestei conexiuni vor participa diferite microcircuite care vor fi descriși în cadrul proiectului .
In acest proect vom incepe cu analiza schemei bloc a calculatorului cu arhitectură deschisă, care stă la baza tuturor sistemelor pe bază de microprocesor necesare pentru introducerea, prelucrarea, obţinerea şi vizualizarea datelor.
Ideea arhitecturii deschise a calculatorului constă în existenţa unor canale standarte de transmitere a informaţiei şi de cuplare a blocurilor calculatorului la aceste canale după necesitate. Structura este standartă şi permite creşterea ei (adăugarea blocurilor noi) fără schimbarea configuraţiei. După acest principiu de arhitectură sunt realizate practic toate calculatoarele contemporane. În calculatorul contemporan (fig.1) există trei tipuri de magistrale. O magistrală conţine un anumit număr de biţi.
Fig.1. Schema bloc simplificata a sistemului propus spre proectare in baza i8088 cu 3Kb RAM
UTM.FRT.TLC-1013 - 3 - - 3 -

Coala
Mod Coala Nr. Document Semnăt. Data
Stracutura sistemului si functiile unitatilor structurale:MA - Magistrala de adrese – prin ea se transmit adresele celulelor de memorie şi dispozitivelor externe. Magistrala de adrese este unidirecţională, adică adresele se transmit într-o singură direcţie.MD - Magistrala de date – serveşte pentru transmiterea informaţiei prelucrate (datelor). De regulă MD este bidirecţională.MC - Magistrala de comandă (MC) – conţine semnale standarte de comandă ale sistemului.
Conţinutul MA, MD, MC au ieşiri la interfaţa de sistemă. La interfaţă putem conecta diferite blocuri. Interfaţa este înzestrată cu cuplele pentru extensii.
Blocul 1. Procesorul - efectuează operaţii asupra datelor şi dirijează cu procesul de prelucrare a datelor, cu celelalte unităţi a calculatorului şi cu dispozitivele externe. Toate datele se prelucrează în procesor, care îndeplineşte funcţia de dirijare. Procesorul determină posibilităţile calculatorului: viteza de lucru, capacitatea magistralei de date, volumul memoriei operative, posibilităţile şi tipurile unităţilor de intrare – ieşire, tipurile de operaţii asupra datelor prin setul de instrucţiuni, regimurile de lucru ale calculatorului. În procesul funcţionării calculatorului procesorul îndeplineşte următoarele operaţii:
formează adresele de memorie a celulelor; primeşte instrucţiunea următoare; decodifică instrucţiunea; organizează ciclul de executare a instrucţiunii; efectuează operaţii de citire şi înscriere în memorie; efectuează schimbul de informaţii cu dispozitivele externe; recepţionează şi tratează semnalele de întrerupere şi acces direct la memorie de la
dispozitivele externe.Procesorul conţine două module : ALU (aritmetical-logical unit) – unitatea aritmetico-logică, care serveşte pentru
efectuarea operaţiilor logice, aritmetice. CU (command unit) – unitatea de comandă, care este destinată pentru producerea
semnalelor de comandă. Blocul 2. – unitatea de intrare-ieşire (Unit I/O) – conţine dispozitive externe şi controlere
pentru deservirea lor. Destinaţia este de a efectua schimbul de informaţie dintre calculator şi utilizator. Controlerele adaptează dispozitivele externe la formatul semnalelor interne ale calculatorului.
Blocul 3. – memoria internă, ce conţine ROM (memoria fixă) şi RAM (memoria operativă), în care se păstrează datele şi programele utilizatorului. ROM serveşte pentru păstrarea programelor de iniţializare şi testare a calculatorului si coduri de procram fixe. Memoria internă este cuplată la MA, MD, MC.
Ulterior ne vom opri detaliat la fiecare componenta structurala a sistemului in bazaunor module/circuite functionale. La anexa proiectul va fi insotit de o schema principala care va prezenta sistemul functional pentru asamblare.
UTM.FRT.TLC-1014 - 4 - - 4 -
Coala
Mod Coala Nr. Document Semnăt. Data
Capitolul 1. 1.1 Descrierea arhitecturii Microprocesorului Intel 8088.
Microprocesoarele K1810BM88( Intel 8088 ) sunt create conform tehnologiei MOS,
tensiunea de alimentare a acestuia fiind de + 5V , curentul de alimentare prevalînd între valorile
300…340mA.
a) Intel 8088 b) K1810BM88
Fig.3 Aspectul carcasei pentru microprocesoarele studiate
Structura microprocesorului K1810BM88 conţine două dispozitive funcţionale
independente: dispozitivul de prelucrare şi dispozitivul de joncţionare. Dispozitivul de prelucrare
(ALU, RDG, RAM superoperativă, registrul fanioanelor) îndeplineşte operaţii asupra datelor şi
determină adresele funcţionale din memorie. Dispozitivul primeşte datele sau adresele de la
magistrală internă, le prelucrează, iar rezultatul îl păstrează în RAM superoperativă sau pe
magistrala internă. Dispozitivul de joncţionare (sumatorul de adrese SMA, registrele segmentelor
şi IP RAM superoperativă, registrele tampon, şirul de instrucţiuni IQ şi interfaţa magistralei),
determină adresele fizice a memoriei, alege şi aşează în şirul instrucţiunile, realizează schimbul de
date între magistrală internă şi cea externă, formează semnalele la ieşirile magistralei externe.
Ambele dispozitive lucrează paralel, datorită acestui fapt alegerea şi realizarea
instrucţiunilor este corelată în timp. Corelarea nu se realizează dacă şirul este încărcat, se
realizează instrucţiunile sau este cererea pentru schimb de date de la magistrala externă. Lungimea
şirului instrucţiunilor pentru K1810BM88 este de 4B.
Modulul de operare constă din unitatea aritmetico-logică (ALU), registre de fanioane şi un
set de registre de uz general.
Registrul de fanioane conţine informaţia suplimentară despre efectuarea operaţiilor.
Destinaţia lor este:
UTM.FRT.TLC-1015 - 5 - - 5 -

Coala
Mod Coala Nr. Document Semnăt. Data
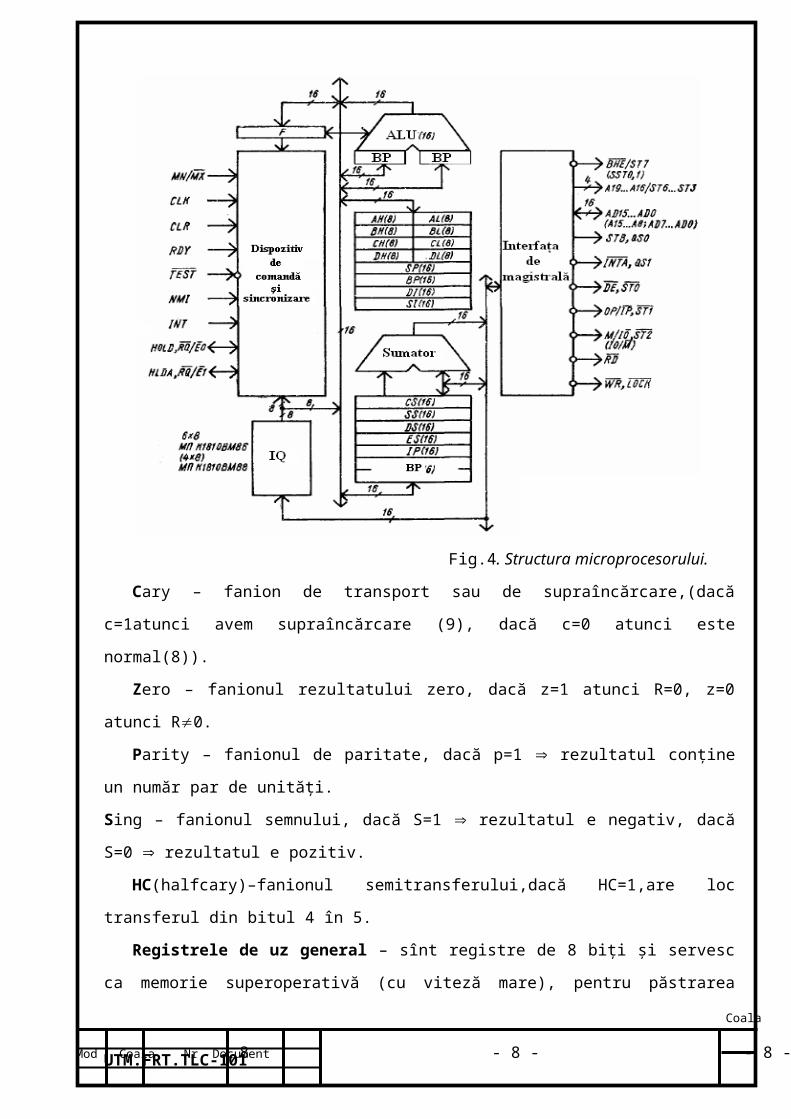
Fig.4. Structura microprocesorului.
Cary – fanion de transport sau de supraîncărcare,(dacă c=1atunci avem supraîncărcare (9),
dacă c=0 atunci este normal(8)).
Zero – fanionul rezultatului zero, dacă z=1 atunci R=0, z=0 atunci R0.
Parity – fanionul de paritate, dacă p=1 rezultatul conţine un număr par de unităţi.
Sing – fanionul semnului, dacă S=1 rezultatul e negativ, dacă S=0 rezultatul e pozitiv.
HC(halfcary)–fanionul semitransferului,dacă HC=1,are loc transferul din bitul 4 în 5.
Registrele de uz general – sînt registre de 8 biţi şi servesc ca memorie superoperativă (cu
viteză mare), pentru păstrarea datelor în microprocesor. Opt registre la număr: W şi Z –
neadresabile; B, C; D, E; H, L – pot fi adresate cu ajutorul instrucţiunilor ca fiind perechi de
registre şi avînd 16 biţi.
Tot în blocul de registre avem două registre specializate. Contorul de program (PC) –
registru de 16 biţi, serveşte pentru păstrarea adresei instrucţiunii curente şi pentru formarea adresei
următoare. La începutul executării instrucţiunii, adresa din PC se transmite prin MA în memorie,
asigurănd citirea instrucţiunii curente. La sfîrşitul executării ei în PC se formează adresa
instrucţiunii următoare prin incrimentare. Astfel se asigură executarea instrucţiunilor una după
alta.
UTM.FRT.TLC-1016 - 6 - - 6 -
Coala
Mod Coala Nr. Document Semnăt. Data
Indicatorul memoriei stive SP (stack pointer) – registru de 16 biţi, conţine adresa celulei de
vîrf a memoriei stive. La operaţii de înscriere adresa se implimentează automat, la citire se
decrementează (se micşorează cu 1).
În modulul de comandă intră:
- registrul instrucţiunii – registru de 8 biţi, serveşte pentru păstrarea codului de instrucţiune în
timpul executării ei.
- unitatea de comandă (UC) serveşte pentru decodificarea instrucţiunii şi organizarea ciclului
de executare a ei. La executarea instrucţiunii curente CPU – formează adresa celulei de memorie
şi o transmite prin MA. Concomitent prin MC se transmite comanda MRD care asigură
transmiterea instrucţiunii prin MD în CPU.
În procesul executării instrucţiunii CPU poate efectua schimbul de date cu memoria şi
unitatea IO. În acest caz el formează adresele şi semnalele de comandă necesare. După executarea
unei instrucţiuni în mod automat se începe executarea instrucţiunii următoare. UC produce şi
primeşte următoarele semnale de comandă: DBIN – citirea datelor; WR – înscrierea datelor în
MD; INT şi INTA – tratarea întreruperilor; HOLD şi HLDA – semnale pentru tratarea regimului
de acces direct la memorie; WAIT şi READY – semnale pentru organizarea lucrului cu
dispozitivele lente; SYNC – semnal destinat pentru controlerul d sistem, devine activ atunci cînd
prin MD se transmite cuvîntul de comandă; Ф1 şi Ф2 – semnale de ceas; RESET semnal de
iniţializare – opreşte executarea instrucţiunii – anulează toate semnalele active, în PC înscrie
adresa de început şi MP începe executarea programului de la această adresă.
În regim maximal MP are magistrală de stare de trei biţi, codul la ieşirea căreia se utilizează
pentru dirijarea cu interfaţa şi dispozitivele de memorie şi externe prin itermediul controlerului de
magistrală. Celelalte ieşiri se utilizează pentru sincronizarea coprocesorului (QS1,0 şi RQ/E1,0) şi
blocarea accesului la magistrala de sistem (LOCK).
Executarea instrucţiunilor se face pînă la primirea instrucţiunii HALT. După primirea ei MP
trece în stare de oprire.
Fiecare segment are un volum de 64kB şi se adresează cu o adresă de 16 biţi locul
segmentului în volumul de memorie se indică cu o adresă de 20 de biţi, care constă din adresa
segmentului din 16 biţi şi 4 biţi inferiori. Segmentele se situează cu pasul 24 =16 baiţi, în orice loc
al memoriei. Cuvîntul în memorie se situează în ordinea crescîndă a numărului baitului, baitul
inferior corespunde adresei inferioare şi invers.
Spaţiul adreselor dispozitivelor externe are o organizare logică 64Kx8 baiţi, nesegmentată şi
adresată cu un cod de adrese de 16 biţi. Este posibil de adresat semispaţiul cu volumul 256 baiţi cu
o adresă de 8 biţi.
UTM.FRT.TLC-1017 - 7 - - 7 -
Coala
Mod Coala Nr. Document Semnăt. Data
Simbolul electric al microprocesorului K1810BM88 , cu asignarea concretă a pinilor este redată
în figura de mai jos :
Fig.5 Simbolul electric cu destinatia terminalelo pentru microprocesorului K1810BM88
În contiuare vom studia destinaţia pinilor pentru microprocesorul K1810BM88 ,
trebuie de remarcat faptul că blocul procesorului poate fi realizat nu numai dintr-un singur
microprocesor dar din mai multe microprocesoare de acelaşi tip.
Pentru regimul minimal de funcţionare blocul procesorului este format dintr-un singur
microprocesor , iar respectiv pentru regim maximal blocul ,procesorului este format dintr-un
anumit număr de microprocesoare care sunt conectate între ele după o anumită configuraţie.
Destinaţia pinilor microprocesorului K1810BM88 poate fi configurata in functie de regimul de
funcţionare. Astfel poate fi in: - regim minim, sau -regim maxim in dependenta de asigurarea
functionala a pinilor la conectare (figura 5)
UTM.FRT.TLC-1018 - 8 - - 8 -
Coala
Mod Coala Nr. Document Semnăt. Data
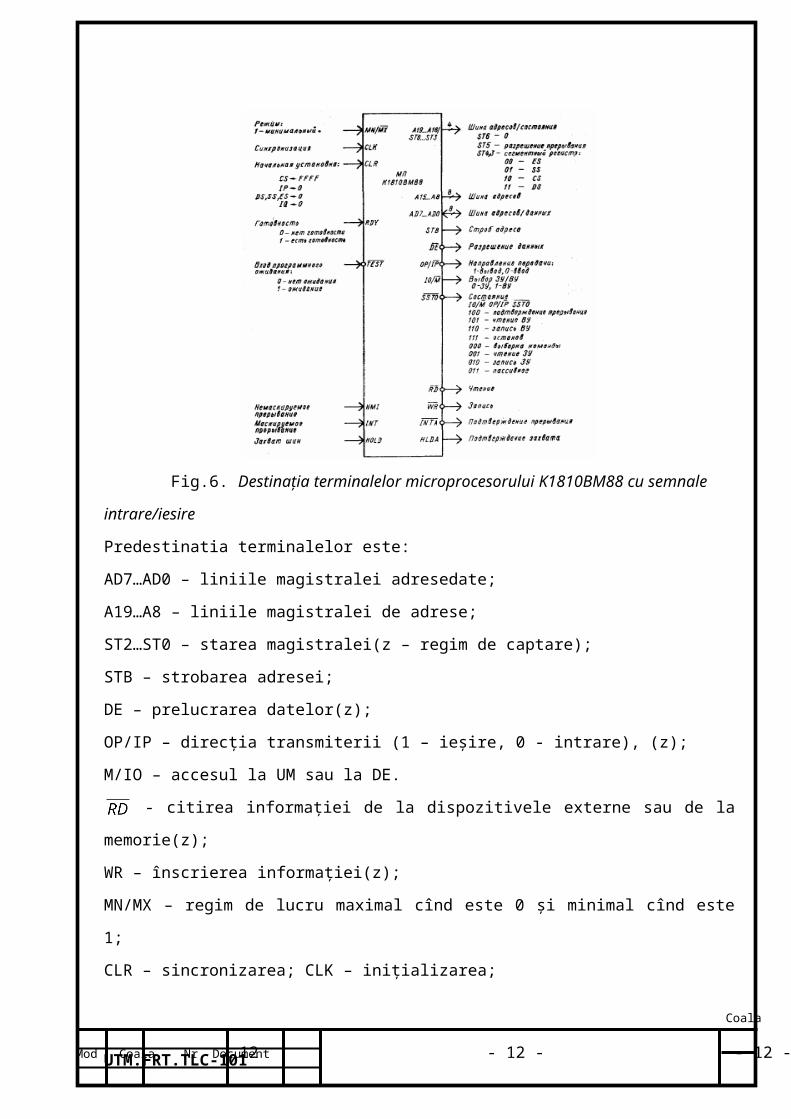
Fig.6. Destinaţia terminalelor microprocesorului K1810BM88 cu semnale intrare/iesire
Predestinatia terminalelor este:
AD7…AD0 – liniile magistralei adresedate;
A19…A8 – liniile magistralei de adrese;
ST2…ST0 – starea magistralei(z – regim de captare);
STB – strobarea adresei;
DE – prelucrarea datelor(z);
OP/IP – direcţia transmiterii (1 – ieşire, 0 - intrare), (z);
M/IO – accesul la UM sau la DE.
- citirea informaţiei de la dispozitivele externe sau de la memorie(z);
WR – înscrierea informaţiei(z);
MN/MX – regim de lucru maximal cînd este 0 şi minimal cînd este 1;
CLR – sincronizarea; CLK – iniţializarea;
RDY – confirmarea că dispozitivul adresat este gata să lucreze reciproc cu MP
la transmiterea datelor (0 – nu este gata, 1 - este gata);
INTA – răspuns la întrerupere;
HLDA – răspuns la acces direct;
INT – întrerupere mascată;
NMI – întrerupere nemascată;
HOLD – acces la magistrale.
UTM.FRT.TLC-1019 - 9 - - 9 -

Coala
Mod Coala Nr. Document Semnăt. Data
Codul format de combinaţia semnalelor SSTO, IO/M, OP/IP indică 8 stări de funcţionare a
magistralei de sistem. Acest cod poate fi utilizat de circuitele externe pentru formarea semnalelor
de comandă. Microprocesorul are ieşiri aparte a magistralei de adrese de 8 biţi A15...A8 şi
magistrală multiplexată tristabilă de adrese/date AO7...ADO. Ieşirea de adrese ale registrelor de
segment la terminalele ST3, ST4 permite de a lărgi spaţiul de adresare a memorie pînă la 4 MB,
utilizînd pentru fiecare segment memorie aparte cu volum 1MB.
Regimul de oprire are loc la terminarea executării programului, după instrucţiunea HLT
procesorul încetează citirea instrucţiunilor şi executarea lor.
În acest caz în regim minimal apare un semnal la ieşirea STB la ieşirile ST2...ST0. În acest regim
procesorul nu generează nici un semnal de comandă.
Din regimul de oprire microprocesorul poate fi scos cu semnalul RESET sau semnalul de
întrerupere la intrare INT.În regimul de resetare microprocesorul K1810BM88 trece după
semnalul activ la intrarea CLR.
El de obicei se formează la conectarea alimentării şi trebuie să acţioneze timp de 50 ms după
atingerea valorii nominale a tensiunii de alimentare. Pentru resetarea în timpul lucrului este
necesar de format semnalul CLR la intrare cu durata nu mai puţin de 4 tacte a impulsurilor de
sincronizare CLK. La aplicarea semnalului RESET procesorul întrerupe executarea operaţiilor
interne şi instalează în starea a treia terminalele A19...A16; AD15...ADO; BHE; M/IO; ST2;
OP/IP; ST1; DE; STO; WR; LOCK; RD cu trecere prin unitate şi în stare dezactivă terminalele
INTA=1, STB=0, HLDA=0, RQ/E=1.
După trecerea semnalului RESET în starea 0 are loc iniţializarea registrelor microprocesorului.
După finisarea acestei operaţii procesorul trece la executarea programului de pe adresa FFFFO16.
Pe această adresă se află instrucţiunea de trecere la începutul programului.
Funcţionarea microprocesorului în momentul executării comenzilor nu reprezintă alt ceva
decît o consecutivitate a ciclurilor de magistrală , în de cursul cărora microprocesorul se
adresează către unitatea de memorie pentru citirea comenzilor , sau pentru schimbul de date cu
unitatea de memorie sau cu dispozitivele externe . Fiecare ciclu de magistrală constă din 4 tacte
T1 , ....T4. În regim de aşteptare , între tactele T3,T4 se execută tactele de aşteptare TW, numărul
cărora se determină de continuitatea semnaluilui extern. Ciclurile de magistrală se îndeplinesc
atunci cînd se execută şirul de comenzi sau se înfăptuieşte schimbul de date în procesul de
executare a unei comenzi . Exemplu , la efectuarea comenzii de îmulţire a biţilor este necesar de
două cicluiri de magistrală care corespunde cu 8 tacte şi 62....69 tacte de mers în gol.
UTM.FRT.TLC-10110 - 10 - - 10 -

Coala
Mod Coala Nr. Document Semnăt. Data
Fig.7 Diagramele de funcţionare în timp ale microprocesorului K1810BM88 în regim
minimal
Diagramele în timp a ciclului de magistrală în regim minimal sunt reprezentate în Fig.7.
În tactul T1 la ieşirea BHE / ST7 , A19…A16/ST6…ST3 şi AD15.....AD0 se emite adresa unităţii
de memorie sau a dispozitivului extern şi semnalul de separare a UM/IOU la ieşirile M/IO
(IO/M) .În tactul T2 la ieşirile BHE/ST7, A19…A16/ST6…ST7, se emite starea
microprocesorului , iar magistrala de adrese la citire trece în stare de rezistenţă înaltă , iar la
înscriere emite date. În decursul tactului T3 datele se primesc conform semnalului de citire la
ieşirea RD sau se adresează pentru înscriere , însoţite la ieşire de semnalul WR. În tactul T4
schimbul dat se termină.
Microprocesorul va trece în regim de aşteptare (tactele TW) atunci cînd RDY=0, care trebuie să
apară înaintea tactului T3 si să se păstreze pînă la tactul T4. Stările ieşirile magistralelor se
păstreză .Pentru a ieşi din regimul de aşteptare trebuie ca RDY=0 şi care trebuie să apară înainte
de tactul T3.
UTM.FRT.TLC-10111 - 11 - - 11 -
Coala
Mod Coala Nr. Document Semnăt. Data
În regimul de aşteptare a programului microprocesorul intră la comanda WAIT atunci cînd
la ieşirea TEST avem un semnal de nivel scăzut, ce activează minimum 5 tacte a impulsurilor de
sincronizare . Pe durata regimul de aşteptare a programului este posibilă întreruperea procesului
de lucru a procesorului . Cu toate acestea procesorul va termina îndeplinirea comenzii WAIT, şi
va trece la deservirea cererii de întrerupere , iar cu rentoarcerea din subprogram se va rentoarce la
executarea comenzii WAIT . În regim de întrerupere microprocesorul execută 2 cicluri de
magistrală , care sunt separate de către 2 cicluri de mers în gol . Pe durata ambelor cicluri adresa
nu se menţionează în schimb se formează impulsul de strobare la ieşire . Primul ciclu de
întrerupere ne mărturiseşte despre începutul ciclului şi piermite pregătirea către primirea bitului
de întrerupere . Al doilea ciclu constă în citirea bitului de întrerupere , care este necesar de
amplasat în partea inferioară a jumătate din magistrala de date . Primind codul de întrerupere
microprocesorul formează adresa vectorului de întreupere , iar în următoarele cicluiri de
magistrală citeşte noua destinaţie a segmentului de comenzi CS , înscriind în celule conţinutul
fanioanelor F, mai apoi conţiunutul anterior al registrului CS, selectează codul operaţiei primei
comenzii a subprogamului de deservire a întreruperilor şi înscrie în celule conţinutul anterior al
registrului IP . După aceasta microprocesorul trece la deservirea întreruperilor : acesta recurge la
completarea şirului de comenzi . Numărul de tacte de la sfîrşitul comenzii , în decursul
executării căreia a intervenit întreruperea , pînă la îndeplinirea execuţiei programului este egal cu
61 de tacte .
Cosecutivitatea cicluirilor de magistrală la prezenţa întreruperilor se remarcă doar prin absenţa de
confirmare a întreruperilor acest fapt aduce la micşorarea tactelor pînă la 51 pentru comanda INT
3 şi a regimului de pas cu 52 de tacte pentru comenzile INT3 şi 53 tacte pentru comanda INTO.
În regimul de acaparare a magistralelor în regim minimal , microprocesorul va intra după
semnalul de cerere la intrarea HOLD=1 la puţin timp după o durată unui sincroimpuls la sfîrşitul
operaţiei ciclului de magistrală ( între tactele T4 sau T1).
Cererea se reproduce dacă sincroimpulsul apare la un interval de timp numai mic de
35nSecunde . La ieşirea HLDA se emite semnalul de confirmare a acaparării magistralelor , şi
toate ieşirile care au cite 3 stări trec în a treia strare de rezistenţă înaltă la ieşire .
Ieşirea din regimul de acaparare se efectueză peste 1,2 intervale de tact după omiterea de la ieşire
a semnalului HOLD . La execuţia comenzii LOCK acapararea magistralelor se reţine pe durata
unui ciclu de magistrală , magistrala se eliberează după îndeplinirea comenzii care urmeză după
comanda LOCK.
UTM.FRT.TLC-10112 - 12 - - 12 -

Coala
Mod Coala Nr. Document Semnăt. Data
Fig.8 .Diagramele în timp ale ciclurilor de magistrală în regim minimal
Fig.9 Diagramele de acaparaea a magistralelor în regim minimal
1.2Descrierea schemei bloc selectate:
Pentru dirijarea cu memoria de uz general şi interfeţele din familia KP580 este necesar de
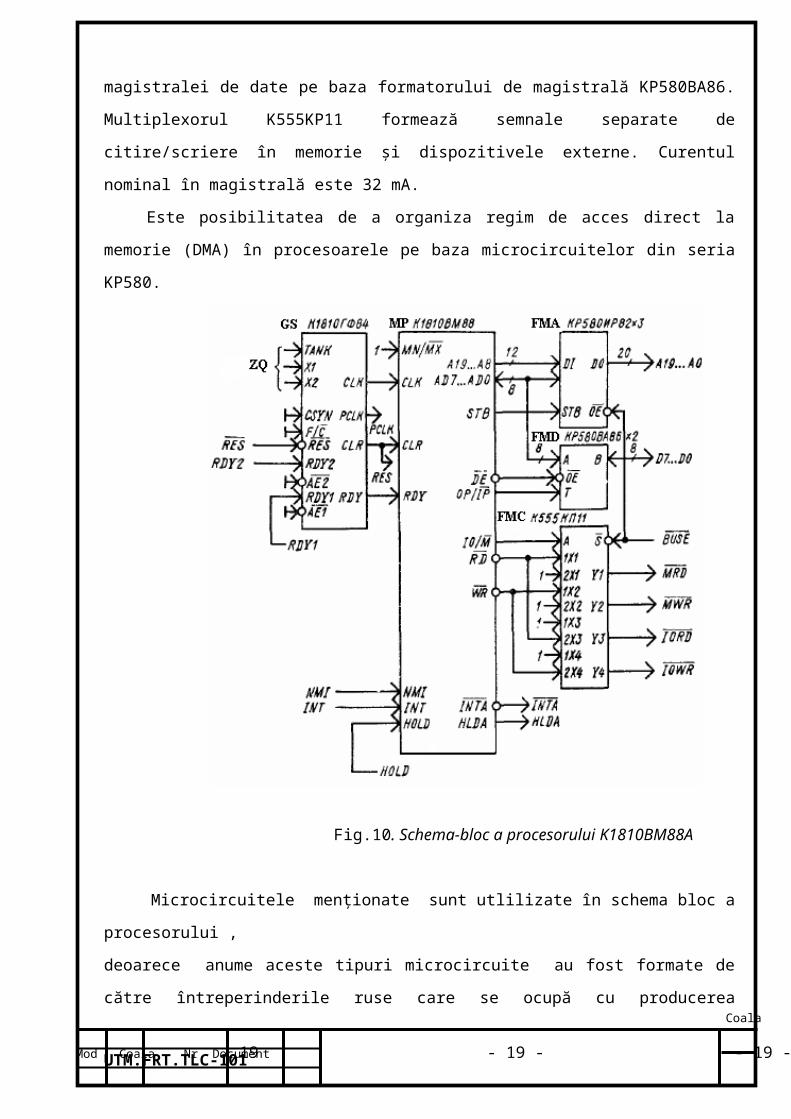
utilizat magistrala de sistem buferizată. În Fig.10. este reprezentată structura MP cu magistrala de
sistem buferizată de 8 biţi în baza microcircuitului K1810BM88. Interfaţa magistralei de adrese
este realizată pe baza registrelor tampon KP580ИР82 iar interfaţa magistralei de date pe baza
formatorului de magistrală KP580BA86. Multiplexorul K555KP11 formează semnale separate de
citire/scriere în memorie şi dispozitivele externe. Curentul nominal în magistrală este 32 mA.
Este posibilitatea de a organiza regim de acces direct la memorie (DMA) în procesoarele pe
baza microcircuitelor din seria KP580.
UTM.FRT.TLC-10113 - 13 - - 13 -
Coala
Mod Coala Nr. Document Semnăt. Data
Fig.10. Schema-bloc a procesorului K1810BM88A
Microcircuitele menţionate sunt utlilizate în schema bloc a procesorului ,
deoarece anume aceste tipuri microcircuite au fost formate de către întreperinderile ruse care se
ocupă cu producerea microprocesoarelor K1810BM88 , să corespund exact tipului dat de
microprocesor .
Trebuie de menţionat faptul că microcircuitele pentru interfaţa magistralei de adrese pe baza
registrelor tampon KP580ИР82 şi a magistralei de date pe baza KP580BA86 sunt tilizate în
blocul procesorului atît în regim minimal cît şi-n regim maximal de funţionare .
Multiplexorul K555KP11 formează magistrala de comandă şi este utilizat numai în cazul cînd
lucrăm în regim minimal de funcţionare a microprocesorului .
În regimul maximal de funcţionare a microprocesorului se va utiliza microcircuitul K1810BГ88
acesta se utilizează din motivul că în cadrul blocului procesorului sunt utilizate mai multe
microprocesoare de acelaşi tip iar anume acest fapt aduce la amplasarea în interiorul blocului a
unei magistrale interne locale .
UTM.FRT.TLC-10114 - 14 - - 14 -

Coala
Mod Coala Nr. Document Semnăt. Data
Fig.11. Schema-bloc a procesorului K1810BM88A în regim maximal
După cum am mai menţionat în cadrul proiectării vom forma blocul procesorului pe baza unui
singur microprocesor vom lucra în regim minimal deci se vor utiliza microcircuitele din Fig.10.
1.3 Elaborarea schemei principiale a blocului procesorului
După cum este evident la elaborarea schemei principiale a blocului procesorului se datorează
schemei bloc din Fig. 10 , conform acesteia am trasat linile de conexiune între microcircuitele
prezente în blocul procesorului în corespundere cu numerotare pinilor din reprezentarea
funcţională a fiecărui microcircuit utilizat .
UTM.FRT.TLC-10115 - 15 - - 15 -
Coala
Mod Coala Nr. Document Semnăt. Data
Fig. 12 Schema electrică pincipială a blocului procesorului
În continuare vom studia conexiunele dintre microcircuite şi semnalele care circulă între acestea
.
Generatorul de sistem KP1810ГФ84 prezintă un generator cu stabilizare cu cuarţ a frecvenţei de
tact a semnalelor de sincronizare pentru toate componentele sistemului. Semnalul CLK e destinat
unităţii centrale a procesorului şi determină viteza efectuării operaţiilor asupra datelor. Semnalul
RDY este destina pentru instalarea microprocesorului confirmarea că dispozitivul adresat este
gata să lucreze reciproc unitatea de memorie şi dispozitivele externe .
La formare conexiunelor dintre microprocesor cu registrele tampon KP580ИР82 şi controlerul
pentru magistrala de date KP580BA86 am utilizat o magistrală comună pentru acestea cu scopul
de a simplifica reprezentarea conexiunilor dintre aceste microcicuite din cadrul schemei
principiale a blocului procesorului.
La magistrala comună avem conectate liniile magistralei adrese/date -AD7…AD0, liniile
magistralei de adrese - A19…A8, din cadrul microprocesorului care sunt direcţionate către cu
registrele tampon KP580ИР82 şi controlerul pentru magistrala de date KP580BA86 . Linile de
UTM.FRT.TLC-10116 - 16 - - 16 -
Coala
Mod Coala Nr. Document Semnăt. Data
conexiune separate de magistala de comună ,dar care de asemenea sun direcţionate către registrul
tampon şi controlerul pentru magistrala de date sunt următoarele :
Semnalul de strobarea adresei – STB din cadrul micropocesorului este direcţionat către intrarea
STB a registrelor tampon KP580ИР82.
Citirea informaţiei de la dispozitivele externe sau de la unitatea de memorie se efectuează cu
ajutorul semnalului al microprocesorului fiind direcţionat către intrarea 2x3 a
multiplexorului K555KP11 ce formează magistrala de comandă din care se formeză ulterior
semnalul IORD ( I/O read) – citirea de la un dispozitiv extern care respectiv va prelua funcţia
semnalului .
Înscrierea informaţiei de la dispozitivele externe sau de la unitatea de memorie se efectuează cu
ajutorul semnalului WR al microprocesorului fiind direcţionat către intrarea 2x4 a
multiplexorului K555KP11 unde are loc formarea semnalului IOWD
( I/O write) – de înscrierea la un dispozitv extern care a preluat funcţia semnalului WR .
Accesul la unitatea de memorie sau de la dispozitivul extern se efectuează cu ajutorul M/IO –
care este direcţionat către intarea A din cadrul multiplexorului K555KP11 .
Direcţia transmiterii a datelor (1 – ieşire, 0 - intrare) se efectuează prin semnalul de la ieşirea
OP/IP care este aplicată la intrarea T a controlerul pentru magistrala de date KP580BA86 .
1.4Descrierea microcircuitelor suplimentare
Generatorul de sistem - produce semnalul de tact pentru sincronizarea proceselor în
microprocesorul K1810BM88 şi a unităţi de memorie cît şi a dispozitivelor externe. Pentru o
sincronizare adecvată am ales generatorul KP1810ГФ84.
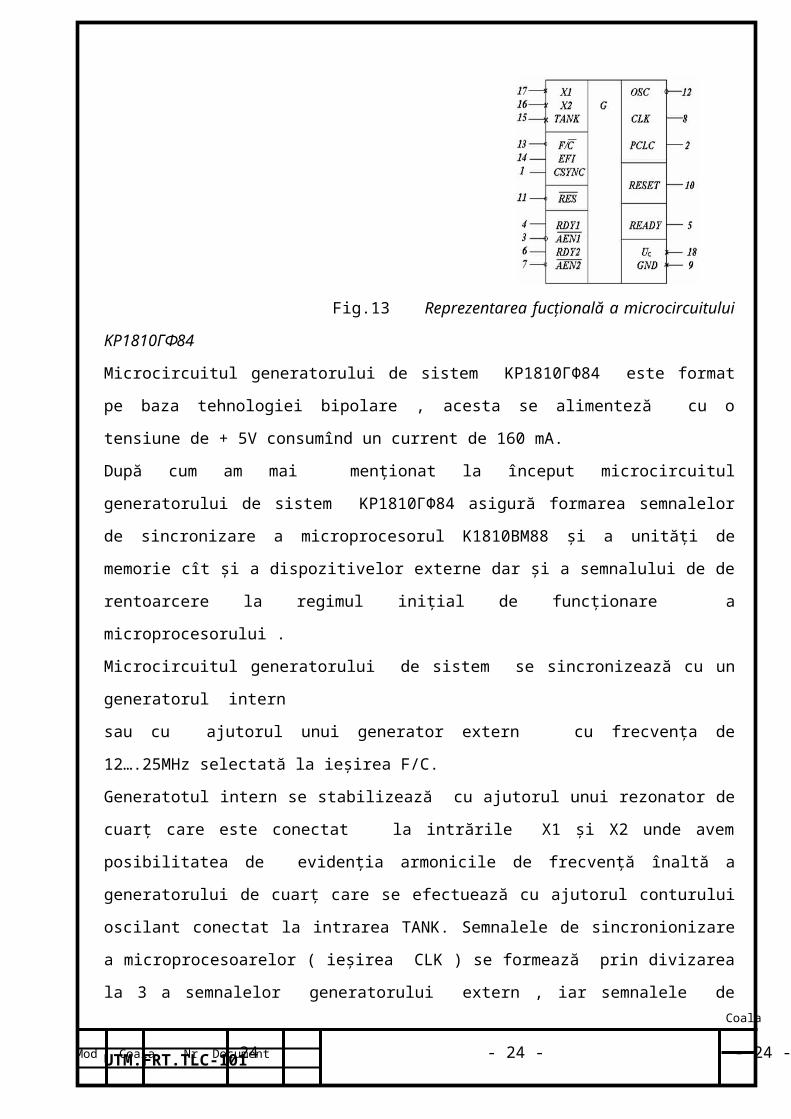
Fig.13 Reprezentarea fucţională a microcircuitului KP1810ГФ84
UTM.FRT.TLC-10117 - 17 - - 17 -

Coala
Mod Coala Nr. Document Semnăt. Data
Microcircuitul generatorului de sistem KP1810ГФ84 este format pe baza tehnologiei bipolare ,
acesta se alimenteză cu o tensiune de + 5V consumînd un current de 160 mA.
După cum am mai menţionat la început microcircuitul generatorului de sistem KP1810ГФ84
asigură formarea semnalelor de sincronizare a microprocesorul K1810BM88 şi a unităţi de
memorie cît şi a dispozitivelor externe dar şi a semnalului de de rentoarcere la regimul iniţial de
funcţionare a microprocesorului .
Microcircuitul generatorului de sistem se sincronizează cu un generatorul intern
sau cu ajutorul unui generator extern cu frecvenţa de 12….25MHz selectată la ieşirea F/C.
Generatotul intern se stabilizează cu ajutorul unui rezonator de cuarţ care este conectat la
intrările X1 şi X2 unde avem posibilitatea de evidenţia armonicile de frecvenţă înaltă a
generatorului de cuarţ care se efectuează cu ajutorul conturului oscilant conectat la intrarea
TANK. Semnalele de sincronionizare a microprocesoarelor ( ieşirea CLK ) se formează prin
divizarea la 3 a semnalelor generatorului extern , iar semnalele de sincronizare a dispozitevelor
externe ( PCLK) prin divizarea la 2 a semnalului CLK.
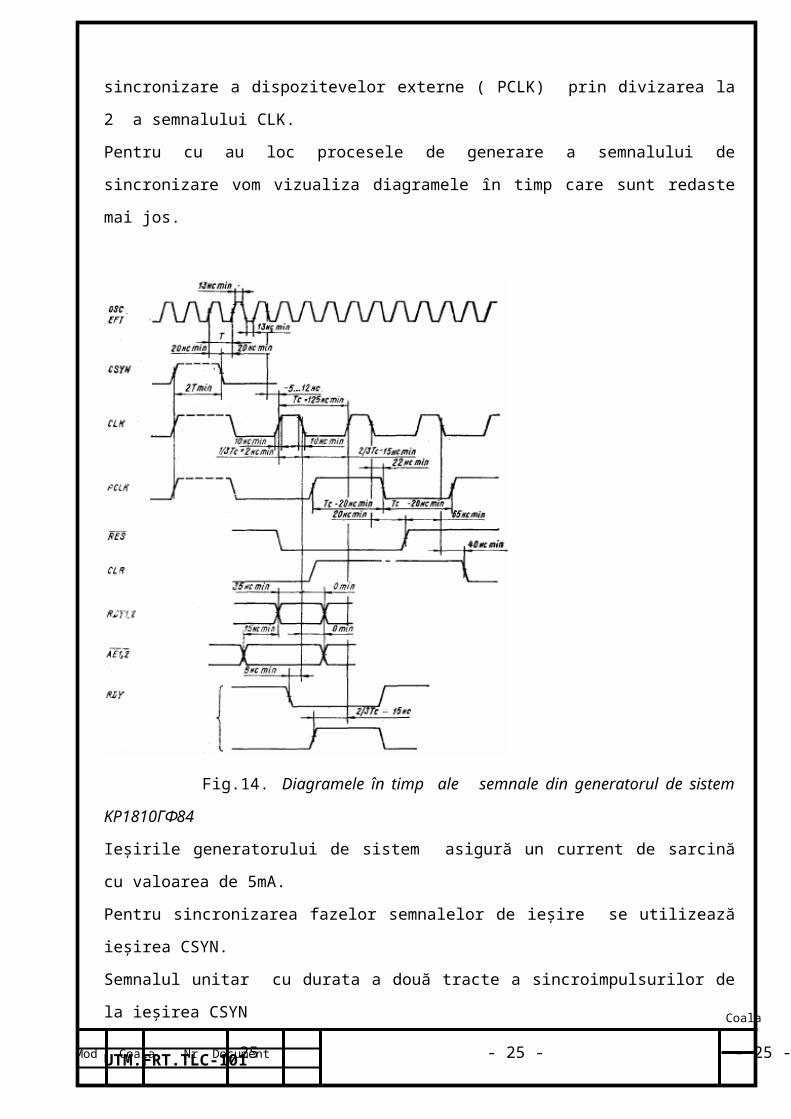
Pentru cu au loc procesele de generare a semnalului de sincronizare vom vizualiza diagramele în
timp care sunt redaste mai jos.
UTM.FRT.TLC-10118 - 18 - - 18 -
Coala
Mod Coala Nr. Document Semnăt. Data
Fig.14. Diagramele în timp ale semnale din generatorul de sistem KP1810ГФ84
Ieşirile generatorului de sistem asigură un current de sarcină cu valoarea de 5mA.
Pentru sincronizarea fazelor semnalelor de ieşire se utilizează ieşirea CSYN.
Semnalul unitar cu durata a două tracte a sincroimpulsurilor de la ieşirea CSYN
Instaleză şi menţine divizorul în starea zero. La finalizarea semnalului la ieşirea CSYN cît şi la
ieşirile CLK şi PCLK apar semnalele de sincronizare .Semnalele adresate la ieşirea CSYN sunt
sincronizate cu ajutorul ciuitelor externe ale sursei de sincroimpulsuri, care sun adresat la ieşirea
EFI. La utilizarea generatorului intern vom avea valoarea
semnalului CSYN =0 . Microcircuitul asigură sincronizarea semnalului instalare în regim iniţial
de funcţionare la ieşirea RES şi care se obţine de la ieşirile RDY1 şi RDY2. Semnalul de
confirmarea faptului că dispozitivul adresat este gata să lucreze reciproc cu microprocesorul care
are valoare unitară la ieşirea RDY1 se formeză dacă RDY =1 atunci cînd AE1=0 şi RDY2=1 cînd
AE2=0.
OSC – frecvenţa de tact necesară pentru dirijarea dispozitivelor ce fac parte din sistem pentru
sincronizare. Semnalele sînt sincrone şi frecvenţele lor sînt descries de relaţia:
fOSC=3fCLK=6fPCLK
în regimul generatorului intern şi fEFI=3fCLK=6fPCLK în regimul generatorului extern.
Schema formării semnalului de resetare RESET are la inrare un bistabil Shmitt, iar la ieşire –
bistabil formînd frontal semnalului RESET prin tăierea semnalului CLK. Deobicei la intrarea
se conectează un circuit RC, care asigură automat formarea semnalului odată cu conectarea ei la
sursa de alimentare.
Registrele buffer (I8282) se folosesc pentru memorizarea adreselor. Am folosit două registre
KP580ИP82 conectate în paralel obţinînd astfel o magistrală de adrese de 16 biti. Structura internă
a unuia constă din opt bistabile de informaţie cu trei stări ce au toate semnalul de înscriere a
informaţiei STB, şi semnalul ce dirijează cu transmiterea informaţiei .
UTM.FRT.TLC-10119 - 19 - - 19 -

Coala
Mod Coala Nr. Document Semnăt. Data
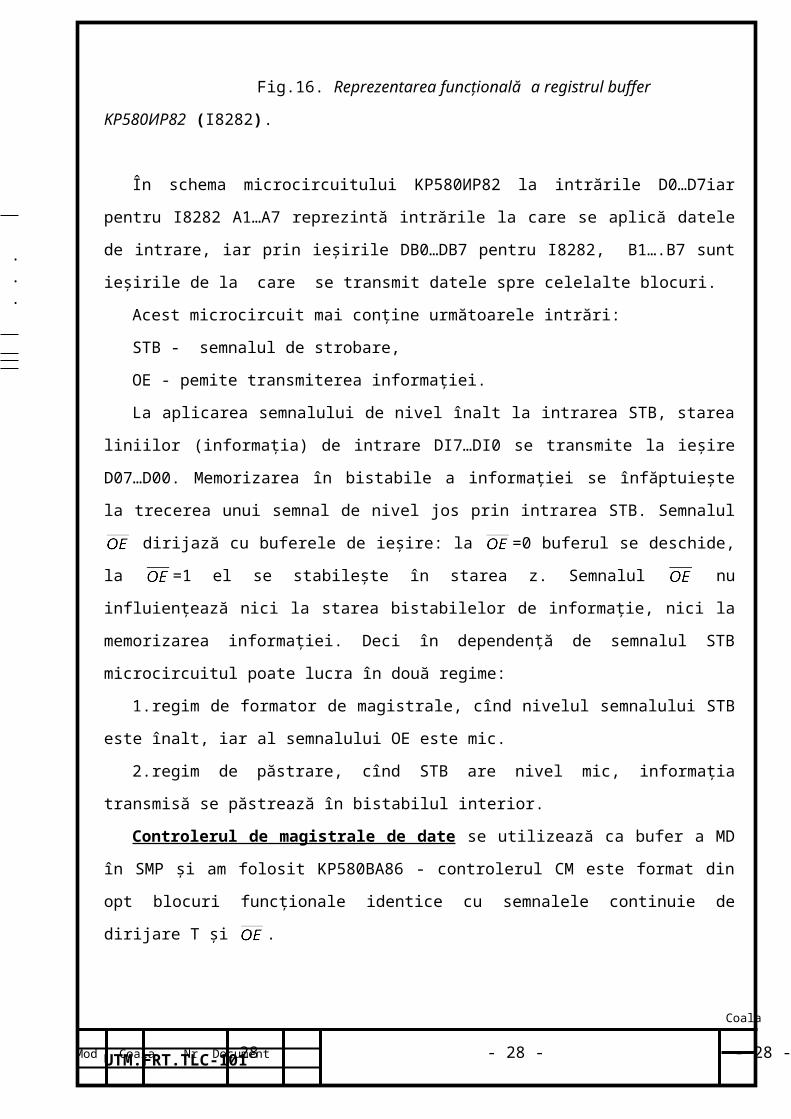
Fig.15 .Reprezentarea grafică a registrului buffer I8282( KP580ИP82)
Fig.16. Reprezentarea funcţională a registrul buffer KP580ИP82 (I8282) .
În schema microcircuitului KP580ИP82 la intrările D0…D7iar pentru I8282 A1…A7
reprezintă intrările la care se aplică datele de intrare, iar prin ieşirile DB0…DB7 pentru I8282,
B1….B7 sunt ieşirile de la care se transmit datele spre celelalte blocuri.
Acest microcircuit mai conţine următoarele intrări:
STB - semnalul de strobare,
OE - pemite transmiterea informaţiei.
La aplicarea semnalului de nivel înalt la intrarea STB, starea liniilor (informaţia) de intrare
DI7…DI0 se transmite la ieşire D07…D00. Memorizarea în bistabile a informaţiei se înfăptuieşte
la trecerea unui semnal de nivel jos prin intrarea STB. Semnalul dirijază cu buferele de ieşire:
la =0 buferul se deschide, la =1 el se stabileşte în starea z. Semnalul nu influienţează
nici la starea bistabilelor de informaţie, nici la memorizarea informaţiei. Deci în dependenţă de
semnalul STB microcircuitul poate lucra în două regime:
1. regim de formator de magistrale, cînd nivelul semnalului STB este înalt, iar al semnalului
OE este mic.
2. regim de păstrare, cînd STB are nivel mic, informaţia transmisă se păstrează în bistabilul
interior.
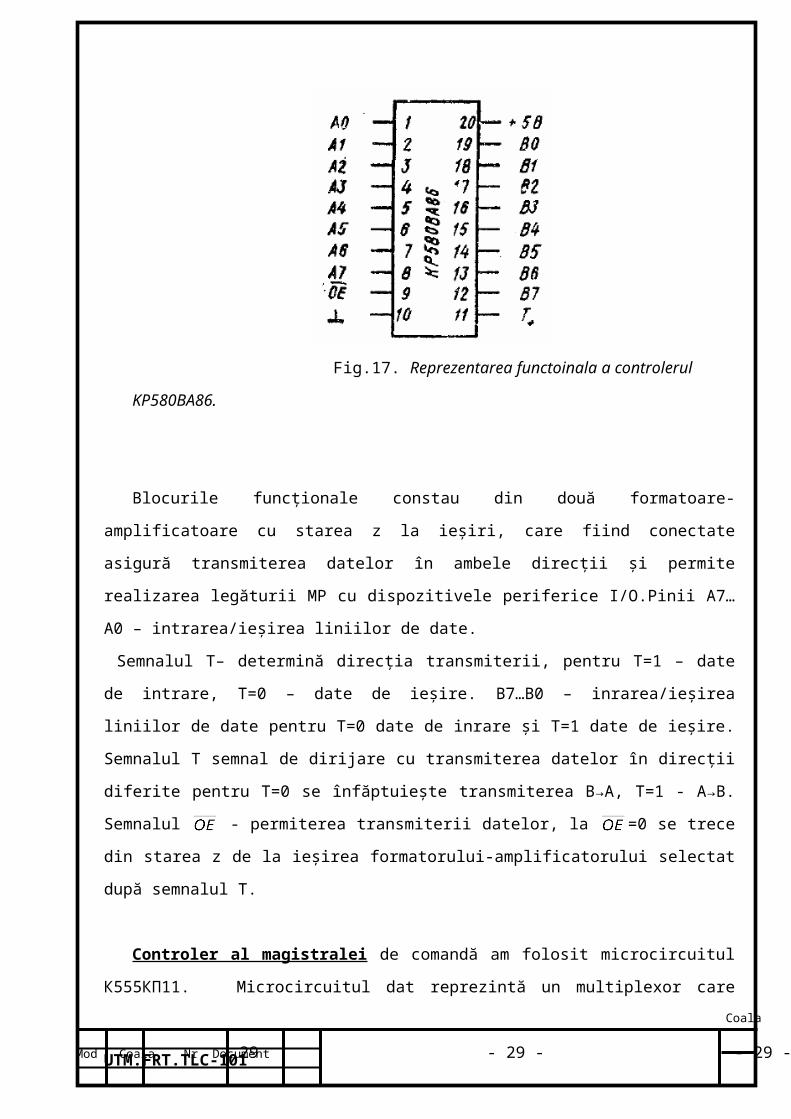
Controlerul de magistrale de date se utilizează ca bufer a MD în SMP şi am folosit
KP580BA86 - controlerul CM este format din opt blocuri funcţionale identice cu semnalele
continuie de dirijare T şi .
UTM.FRT.TLC-10120 - 20 - - 20 -
.
.
.

Coala
Mod Coala Nr. Document Semnăt. Data
Fig.17. Reprezentarea functoinala a controlerul KP580BA86.
Blocurile funcţionale constau din două formatoare-amplificatoare cu starea z la ieşiri, care
fiind conectate asigură transmiterea datelor în ambele direcţii şi permite realizarea legăturii MP cu
dispozitivele periferice I/O.Pinii A7…A0 – intrarea/ieşirea liniilor de date.
Semnalul T– determină direcţia transmiterii, pentru T=1 – date de intrare, T=0 – date de ieşire.
B7…B0 – inrarea/ieşirea liniilor de date pentru T=0 date de inrare şi T=1 date de ieşire. Semnalul
T semnal de dirijare cu transmiterea datelor în direcţii diferite pentru T=0 se înfăptuieşte
transmiterea B→A, T=1 - A→B. Semnalul - permiterea transmiterii datelor, la =0 se trece
din starea z de la ieşirea formatorului-amplificatorului selectat după semnalul T.
Controler al magistralei de comandă am folosit microcircuitul К555КП11. Microcircuitul
dat reprezintă un multiplexor care desparte semnalele de înscriere/citire a informaţiei din memorie
de semnalele de înscriere/citire a informaţiei de la dispozitivele externe şi pentru transformarea
unui cod binar regulat într-un cod unitar (cod unitar – semnal activ într-o singură poziţie). Acest
decodificator acordă MP posibilitatea de a accesa sau a apela unităţile memoriei ROM, porturile
I/O, controlerul memoriei dinamice. Reprezentarea grafică a microcircuitului К555КП11 este
arătată în fig.22.
UTM.FRT.TLC-10121 - 21 - - 21 -

Coala
Mod Coala Nr. Document Semnăt. Data
Fig.18.Reprezentarea functionala a controlerului К555КП11.
De la MP prin MA vine adresa din 3 biţi, care se decodifică în cod unitar din 5 biţi (8 biţi
posibili). Acest cod se transmite la unităţile sus numite, deoarece intrarea fiecăruia este negată ,
semnalul activ va fi zero. Adică vor lucra toate blocurile în afară de unul (la care vine 1 logic).
La intrarea microcircuitului se aplică semnalele , care multiplexorul respectiv
le separă şi formează cu ajutorul acestor semnale şi .
Semnalul prezintă citirea informaţiei din memorie, - înscrierea informaţiei în
memorie, - citirea informaţiei de la unitatea de intrare/ieşire, prezintă înscrierea
informaţiei în unitatea de intrare/ieşire.
Semnalul care determină citirea /înscrierea informaţiei din memories au de la unitatea de
intrare/ieşire este semnalul care este aplicat de la microprocesor . Semnalul este
semnalul de comandă care ajută la formarea şi separarea semnalelor de la ieşirea microcircuitului.
Controlerul magistralei de comandă se poate de făcut pe baza elementelor logice (decodificator şi
element logic ŞI-SAU).
Capitolul 2 Proiectarea memoriei interne a sistemului.
UTM.FRT.TLC-10122 - 22 - - 22 -

Coala
Mod Coala Nr. Document Semnăt. Data
Unităţile de memorie ale sistemelor de microprocesor sunt destinate pentru păstrarea datelor şi
programelor. Caracteristicile de bază a unităţii de memorie sunt volumul, viteza de lucru, puterea
consumată, rezistenţa la apariţia erorilor.
La proiectarea memoriei se rezolvă problemele de divizare a volumului necesar de memorie
între memoria operativă RAM şi fizică ROM; proiectarea volumului şi capacităţii RAM şi ROM;
realizarea dispozitivelor de joncţionare a RAM şi ROM cu magistrala de sistem.
Unităţile de memorie se construiesc pe bază de circuite integrate de memorie care se
caracterizează cu capacitatea ni şi volumul Ni. Capacitatea necesară se proiectează prin adăugare a
K=n/ni circuite integrate (CI) conectate în paralel, iar volumul necesar - prin conectarea a L=N/N i
BI conectate serie, fiecare bloc constituind din K CI de memorie.
Sistemele de funcţionare a memoriei cu magistrala de sistem asigură acordarea diagramelor de
timp de funcţionare a memorie şi operaţiile de citire/înscriere, acordarea după nivele de sarcină a
semnalelor.
RAM sunt realizate pe bază de CI statice cu volumul N i şi capacitatea ni are intrări de adrese cu
capacitatea m=log2Ni, intrările Ei ieşirile de date cu capacitatea ni, intrările de citire/înscriere.
Pentru a realiza capacitatea necesară n a memoriei, K=n/ni elemente de memorie se conectează
în module, aşa cum e reprezentat în Fig23. Toate CI a modulului au intrări de adresă comune,
selectare a cristalului şi citire/înscriere. Întrările şi ieşirile de date formează întrările şi ieşirile
modulului dat cu capacitatea n biţi. În acest caz CI RAM static O păstrează biţii inferiori n i, iar CI
RAM statice (k-1) - biţii superiori. Pentru a primi volumul necesar N a memoriei se unesc L=N/N i
blocuri de memorie aşa cum e reprezentat în Fig 20. Pentru divizarea adreselor de obicei se
foloseşte un multiplicator de adrese, numărul de ieşiri ai căruia L este egal cu numărul de module
de memorie, iar numărul intrărilor l=log2L.
Toate intrările şi ieşirile modulelor de memorie, în afară de intrările de selectare, se unesc între
ele, iar intrările de selectare se unesc în corespundere cu ieşirele multiplexorului de adrese.
Modul RAM statică cu organizarea N*n are intrările de adrese cu capacitatea (l+m)=log2N,
intrările, ieşirele de date cu capacitatea n şi 0 intrare comună de înscriere/citire. Intrarea de
selectare CS se foloseşte pentru a plasa în locul necesar al spaţiului de adresă al memoriei.
UTM.FRT.TLC-10123 - 23 - - 23 -
Fig.19. Schema de sporire a capacităţii memoriei pe CI RAM statică
. . . .
n=kni
CS
DO(n)
CI RAM statica
CEOA(m)
DO(ni)
m
ni
CS
CI RAM statica
CEOA(m)
DO(ni)
m
ni
CS CEOA(m)
…
Coala
Mod Coala Nr. Document Semnăt. Data
RAM dinamică este realizată pe bază de elemente capacitive de memorie şi necesită regenerare
periodică a informaţiei. Timpul de regenerare se calculează în unităţi de milisecunde. La volume
mari de memorie pentru regenerarea fiecărei celule sunt necesare intervale de timp egale cu
fracţiuni de microsecunde. Memoria RAM dinamică cu volumul Ni şi capacitatea ni are
m/2=(log2N)/2 linii de adrese, intrări CAS şi RAS, intrări şi ieşiri de date şi intrare de permitere a
citirii
ROM sunt realizate pe bază de circuite integrate cu memorie fixă de patru tipuri: cu mascare,
programabile, cu ştergere electrică.
ROM cu volumul Ni şi capacitatea ni are magistrala de adrese cu capacitatea m=log2Ni,
magistrala de date de ieşire cu capacitatea ni şi întrări de selectare .
CIROM programabile au întrări de programare, iar pentru înscrierea datelor la programare se
folosesc ieşirile de date a CI.
2.1 Proiectarea memoriei RAM
UTM.FRT.TLC-10124 - 24 - - 24 -
. . . .
DO(n)
CI RAM dinamica0
CEO
ni
CAS
CI RAM dinamicak-1
CEOA(m/2)
ni
…
RAS
DI(ni) DO(ni) DI(ni) DO(ni)
nini
DI(n)
…
CAS A(m/2)RAS
m/2
CEOCAS A(m/2)RAS
Coala
Mod Coala Nr. Document Semnăt. Data
Proiectarea memorie RAM pentru sistemul pe bază de microprocessor presupune evident un
anumit mod de proiectare după un anumit criteriu conform căruia vom alege correct tipul de
microcircuitului RAM , numărul şi marca microcicuitului utilizată.
Pentru implementarea memoriei RAM a unui sistem pe bază de microprocessor vom selecta tipul
microcircuitului RAM după următoarele criterii:
- Microcircuitul RAM static se va implementa atunci cînd volumul memoriei mai mic
sau egal cu 8KB : 16KB .
- Mcrocircuitul RAM dinamic se va implementa atunci cînd volumul memoriei mai
mare sau egal cu 8KB : 16KB.
Conform datelor iniţiale din sarcina de proiectare volumul memoriei RAM este egal cu 3KB deci
respective vom utiliza un microcircuit RAM static .
Definirea sistemului de magistrale
Următorul pas în proiectare constă în definirea sistemului de magistrale , după cum ştim
microprocesoarele Intel 8088 se utilizează în calculatoare la prelucrarea operanzilor de 16 biţi.
După criteriul dat magistrala de adrese din cadrul blocului procesorului este formată din două
microcircuite , care sunt nişte registre tampon KP580ИР82 repzentate în Fig. 17 din schema
electrică pincipială a blocului procesorului.Ca rezultat avem o magistrală de adresă de 16 biti ,
iar respectiv magistrala de date din cadrul blocului procesorului este de 8 biti şi este formată de
către microcircuitul KP580BA86 de asemenea putem obţine o magistrală tot de 8 biti cu ajutorul
microcircuitului KP580BK28 , care în cadrul său mai conţine elemente de realizare ale
controilerului de formare a magistralei de comandă .
Conform schemei electrice principiale ale blocului procesorului magistrala de adrese de 16biti
este formată este formată de microcircuitul KP580ИР82 , magistrala de date de 8biti este formată
din microcircuitul KP580BA86 iar magistrala de comandă care conţine semnalele MRD şi MWR
este formată cu ajutorul microcircuitului К555КП11.
Astfel am definit sistemului de magistrale necesare pentru proiectarea unităţii de memorie
conform cerinţelor propuse în sarcina pentru proiectare .
Alcătuirea hărţii memoriei
În primul rînd am selectat microcircuitul de memorie necesar pentru crearea memoriei ROM şi
RAM .
Din tabela 5.1 pagina numărul 190 din cartea «Проектирование ЭВМ на микропроцессорах».
Артюхов am selectat pentru memoria RAM microcircuitul K537 PУ8 cu volumul memoriei 2K x
8 ce corespunde volumului de 2KB iar pentru obţinerea unui volum de 3 KB propuşi pentru
UTM.FRT.TLC-10125 - 25 - - 25 -
Coala
Mod Coala Nr. Document Semnăt. Data
proiectare vom utiliza respectiv 2 microcircuite de aceste fel. Dintre care unul va fi utilizat coplet
iar altul numai 1|2 din capacitate
După care din tabela 5.3 pagina 195din aceeaşi carte am selectat microcircuitul pentru memoria
ROM de tipul K573РФ2 care are volumul memoriei 2K x 8 corespunde volumului de 2KB.
Următorul pas este crearea hărţii memoriei unde vom scrie codurile de adresare ale procesorului
către memoriea RAM şi ROM pentru fiecare microcircuit în parte.
Adresa de început a microprocesorului Intel 8088 este FFFF H care corespunde adresei de început
a memoriei ROM , pentru cazu dat adresa de începu va fi EFFF H.
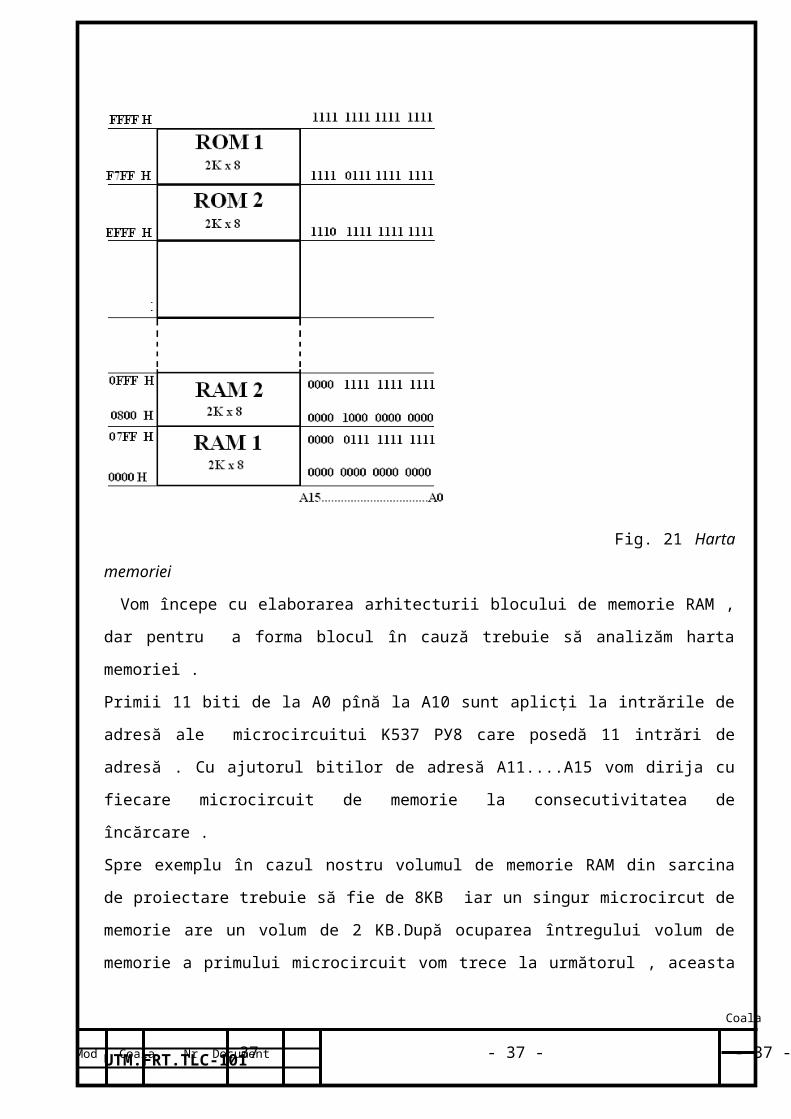
Fig. 21 Harta memoriei
Vom începe cu elaborarea arhitecturii blocului de memorie RAM , dar pentru a forma blocul în
cauză trebuie să analizăm harta memoriei .
Primii 11 biti de la A0 pînă la A10 sunt aplicţi la intrările de adresă ale microcircuitui K537 PУ8
care posedă 11 intrări de adresă . Cu ajutorul bitilor de adresă A11....A15 vom dirija cu fiecare
microcircuit de memorie la consecutivitatea de încărcare .
Spre exemplu în cazul nostru volumul de memorie RAM din sarcina de proiectare trebuie să fie de
8KB iar un singur microcircut de memorie are un volum de 2 KB.După ocuparea întregului
volum de memorie a primului microcircuit vom trece la următorul , aceasta avînd loc consecutiv
pînă la completarea a întregului volum de memorie.
UTM.FRT.TLC-10126 - 26 - - 26 -
Coala
Mod Coala Nr. Document Semnăt. Data
Fig.22 Reprezentarea funcţională microcircuitui K537 PУ8
A0........A10 intrări de adresă.
DIO0......DIO7-intrări/ieşiri de date.
WR- intrarea de activare a înscrierilor de date .
RD - intrarea de activare a citirii datelor din microcircuit .
CS- intrarea de acces la înscrieria/citirea datelor.
Dirijarea dată se va efectua cu ajutorul decodificatorului К155ИД4 , la intrările de adresă A şi B
ale acestuia vom conecta biţii superiori din magistrala de adresă A11 şi A12.
La fiecare din ieşiri se obţine zero logic pe durata de încărcare a microcircuitului de memorie ,
nivelul de zero logic corespunde cu semnalul activ aplicat la intrarea CS a microcircuitului de
memorie . Nivelul 1 logic se va instala atunci cînd spaţiu liber de memorie a fiecărui
microcircuit se completează în întregime, astfel la intrarea CS vom avea nivelul dat care va
întrerupe înscrierea datelor .
Conform reprezentării funcţionale ale microcircuitului decodificatorului К155ИД4 ,
acesta conţine 8 ieşiri de date dintre care 4 pentru doar o jumătate din microcircuit care vor lucra
atunci cînd utilizăm decodificatorului К155ИД4 ca decodificator de doi biti. În continuare vom
utiliza ieşirile B1.....B2 ale decodificatorului К155ИД4 , acest fapt se asigură prin aplicarea a
nivelului zero logic la intrările negate E3-E5. După completarea întregului volum de memorie de
8KB asigurat de cele 4 microcircuite K537 PУ8 , la intrările CS ale acestora vom aplica 1 logic ,
mai departe putem lucra cu a doua jumătate a decodificatorului , această trecere se face prin
aplicare nivelului 1 logic la intrarea E2 şi E3 din magistrala de adrese de la bitul de adresă A13,
care face parte din cod de adresă de încheiere a ultimului microcircuit de memorie RAM4.
Semnalele MRD şi MWD sunt aplicate la circuitul DD1( ŞI logic )iar a semnalele adreselor A14
şi A15 sunt aplicate la un circuit DD2( SAU logic) , după care circuitele logice date sunt
UTM.FRT.TLC-10127 - 27 - - 27 -
Coala
Mod Coala Nr. Document Semnăt. Data
conectate la un circuit DD3( SAU logic) care transmite un anumit nivel logic la intrările E1 şi E4
ale decodificatorului К155ИД4.
Fig 23 Reprezentarea grafică a decodificatorului K155ИД4
Fig24 Reprezentarea funcţională a decodificatorului K155ИД4
2.2 Proiectarea memoriei ROM
După alcătuirea hărţii memoriei din Fig.26 şi proectarea memoriei RAM este mai uşor de
proiecta şi blocul memoriei ROM deoarece avem aproximativ aceleaşi principi de proiectare .
Primii 11 biti de la A0 pînă la A10 sunt aplicţi la intrările de adresă ale microcircuitui K573РФ2
care posedă 11 intrări de adresă . Cu ajutorul bitilor de adresă A11....A15 vom dirija cu fiecare
microcircuit de memorie la consecutivitatea de citire a datelor .
UTM.FRT.TLC-10128 - 28 - - 28 -
Coala
Mod Coala Nr. Document Semnăt. Data
Fig. 25 Reprezentarea funcţională a microcircuitui K573РФ2
A0…….A10 intrările de adresă.
DO0…….DO7 ieşirile de date .
CS- intrarea de selecţie a microcircuitului .
CE0- intrarea de acces la citirea datelor.
În cadrul proiectului am selectat două microcircuite de memorie de acest tip care ne asigură un
volum de 4KB. După citirea întregului volum de memorie a primului microcircuit vom trece la
următorul , aceasta avînd loc consecutiv citirea a întregului volum de memorie. Dirijarea dată se
va efectua cu ajutorul circuitului ŞI logic cu 3 intrări la care sunt aplicate semnalele din
magistrala de adresă A13,A14, A15 care asigură nivelul 1 logic .Aplicăm semnalele de la adresa
A12 concomitent la un circuit DD5( SAU-NU ) şi la circuitul DD6 ( ŞI-NU ), totodată ieşirea de
la DD5 se uneşte la intrarea DD7 ( ŞI-NU ).De la ieşirea DD4( ŞI ) se aplică semnalul la DD5 şi
DD7. Această conexiune ne piermite obţinerea semnalelor CS1şi CS2 cu ajutorul cărora dirijăm
consecutivitatea de selecţie a celor două microcircuite.
De la ieşirea DD4( ŞI ) se aplică semnalul la DD5 şi DD7. Această conexiune ne piermite
obţinerea semnalelor CS1şi CS2 cu ajutorul cărora dirijăm consecutivitatea de selecţie a celor
două microcircuite.
UTM.FRT.TLC-10129 - 29 - - 29 -

Coala
Mod Coala Nr. Document Semnăt. Data
Fig.26Schema de arhitectură a unităţii de memorie a blocului pe bază microprocesorului K1810BM88 În continuare vom menţiona care dintre microcircuitele logice utilizate la crearea unităţii de memorie sub ce model funcţional pot fi înlocuite .
DD4 este alcătiuit din microcircuitul 531ЛИ3 DD2- DD3 pot fi fiecare înlocuite cu microcircuitul 155ЛЛ1DD6-DD7 pot fi fiecare substituite cu microcircuitul 531ТЛ3.
UTM.FRT.TLC-10130 - 30 - - 30 -
Coala
Mod Coala Nr. Document Semnăt. Data
Capitolul 3.
Proiectarea porturilor sistemului.
3.1 Elaborarea blocului pentru porturile parlele
Procesul tehnologic constă dintr-un şir de acţiuni care trebuie executate într-o ordine anumită.
Ordinea necesară de execuţie a operaţiilor tehnologice se asigură uşor de către sistemul de dirijare
programabil.
Mecanismul care necesită dirijarea poate fi conectat la unul din porturile I/0. Aparatele reale
este inutil de a conecta direct la sistemul microprocesor, deoarece acestuia nu-i ajunge puterea
destulă pentru a dirija, funcţia lui este de a controla şi regla procesul. Pentru a asigura regimul
normal de funcţionare este nevoie de un şir de dispozitive: porturi, amplificatoare.
Convertorul este unul din aceste dispozitive. El permite de a transforma şirul semnalelor
digitale în semnale analogice şi invers (CDA şi CAD).
Sistema de intrare/ieşire este destinată pentru interconectarea procesorului cu mediul
extern. Ea reprezintă totalitatea canalelor de I/O fiecare dintre ele deservind un dispozitiv extern.
Canalul conţine surse de interconectare cu magistrala de sistem (interfaţa dispozitivului extern) şi
sursele de gestionare cu intrarea şi ieşirea şi se realizează prin dispozitive tehnice de intrare/ieşire:
dispozitivul I/O cu soft I/O.
Interfaţa este un complex de mijloace HARD şi SOFT pentru organizarea transferului de
date între două sisteme. Fiecare interfaţă are un protocol de schimb de date.
Sistemul de intrare/ieşire se caracterizează prin numărul de canale, posibilitatea lor de
transmitere şi capacitatea.
Transferul de informaţie dintre procesor şi dispozitivele externe se realizează prin
dispozitive I/O care mai sunt numite şi porturi. Deosebim 3 tipuri de porturi în dependenţă de
modul de transfer al datelor:
a) porturi paralele (LPT)
b) porturi serie (COM, USB)
c) porturi analogice (CDA, CAD).
Microcircuitul KP580BB55A prezintă port paralel de întrare/ieşire, se utilizează în calitate de
dispozitiv de întrare/ieşire de destinaţie generală ce realizează joncţionarea diferitor dispozitive
periferice cu magistrala de date a sistemului.
UTM.FRT.TLC-10131 - 31 - - 31 -
Coala
Mod Coala Nr. Document Semnăt. Data
Fig.27 Reprezentarea grafică a Microcircuitul KP580BB55A
Fig.28 Reprezentarea funcţională a portului paralel KP580BB55A.
Destinaţia pinilor microcircuitului:
PA7–PA0 - canalul informaţional A;
PC7–PC0 - canalul informaţional C;
PB7–PB0 - canalul informaţional B;
RD – citirea informaţiei;
CS – selectarea MC;
A1, A0 – biţii inferiori ai MA;
UCC – tensiunea de alimentare +5V;
D7-D0 – canalul de date;
SR – instalare în poziţie iniţială;
WR – înscrierea informaţiei.
Transferul de date între magistrala de date şi microcircuit se realizează printr-un canal de 8 biţi
bidirecţional tristabil (D).
UTM.FRT.TLC-10132 - 32 - - 32 -

Coala
Mod Coala Nr. Document Semnăt. Data
Pentru legătura cu dispozitivele externe se utilizează 24 de linii de întrare/ieşire grupate în 3
canale de 8 biţi BA, BB, BC, direcţia de transmitere a datelor şi regimul de funcţionare cărora se
determină modul de programare a portului.
Microcircuitul poate funcţiona în trei regimuri de bază. În regimul 0 se asigură posibilitatea
transferului sincron dirijat de program a datelor prin 2 canale independente PA şi PB de 8 biţi şi
două canale de 4 biţi BC. În regimul 1 se asigură posibilitatea înscrierii sau citirii informaţiei
în/sau din dispozitivul periferic prin două canale independente de 8 biţi BA şi BB după semnale de
dirijare. În acest caz liniile canalului C se folosesc pentru recepţionarea şi transmiterea semnalelor
de dirijare cu transferul de date. În regimul 2 se asigură posibilitatea de transfer a informaţiei cu
dispozitivele periferice prin canalul bidirecţional de 8 biţi BA după semnale de dirijare. Pentru
asigurarea transferului se folosesc 5 linii ale canalului BC.
În sistemul proiectat pe baza microprocesorului I8088 portul paralel pe baza
microcircuitului KP580BB55A a fost folosit pentru transferul datelor de la tastatura matricială
(canalele BA şi BB) şi de la convertorul digital-analogic (canalul BC).
3.2Proiectarea dispozitivelor periferice
Dispozitivele periferice sunt dispozitivele cuplate la sistemul cu microprocesor (ex.
computer) în mod opţional şi care permit de a efectua schimbul de informaţie între utilizator şi
calculator.
Din dispozitivele periferice fac parte:
a) tastatura
b) manipulatoare (mouse, joystick)
c) dispozitivele pentru vizualizare informaţie (monitor, panou, indicatoare)
d) dispozitive al memoriei externe (Floppy Disc, Hard Disc, magnetofoane)
e) dispozitive intrare/ieşire grafice (plotere, camere, printere).
Tastatura. Există două tipuri de tastatură:
tastatura pe bază de matrice - cel mai simplu tip, se utilizează în sisteme simple.
tastatura în cod serie (standard) - se utilizează în sisteme mai complicate (de exemplu în
calculatoarele moderne).
Schema bloc de conectare a tastaturei se prezintă în fig.29:
UTM.FRT.TLC-10133 - 33 - - 33 -

Coala
Mod Coala Nr. Document Semnăt. Data
Fig.29 Conectarea tastaturei cu microcircuitul KP580BB55A
Tastatura nu are nici o schemă electrică în plus şi prezintă nişte comutatoare aranjate în formă de
matrice. Pentru proiectarea tastaturei, am folosit un port de intrare/ieşire paralel. Se utilizează 2
porturi paralele (A şi B) ale microcircuitului КР580ВВ55А, studiat mai sus. În cazul analizat
avem nevoie de 64 de taste. Luînd în considerare ca portul A are 8 ieşiri şi portul B are 8 (adică se
poate obtine o tastatură cu: 8x8=64 butoane).
La apăsarea tastei corespunzătoare a liniei şi coloanei se scurtcircuitează formînd o conectare.
Detectînd poziţia liniei şi coloanei în care s-a produs scurtcircuitul contactelor se determină codul
cuvîntului corespunzător tastei apăsate. Portul de ieşire trimite semnalul zero în linia zero şi unu în
restul liniilor, apoi senumără şi se verifică liniile coloanelor. Dacă în linia zero nu este semnalul
zero procesul se repetă pentru linia unu , apoi pentru linia a doua. Cînd se detectează zero se
determină tasta apăsată, poziţia liniei este cunoscută după combinaţia introdusă, iar poziţia
coloanei după rezultatul introducerii. Împreunînd codul poziţiei liniei şi coloanei, în care s-a
detectat zero se poate de format un cuvînt dintr-un simbol arătînd poziţia tastei apăsate.
Claviatura are neajunsuri:
- apăsarea concomitentă a două taste şi apariţia proceselor tranzitorii la conectarea şi
deconectarea întrerupătorului.
UTM.FRT.TLC-10134 - 34 - - 34 -
Coala
Mod Coala Nr. Document Semnăt. Data
Capitolul 4. Elaborarea schemei de structură a sistemului.
4.1 Studierea regimurilor de funcţionare a dispozitivului pe bază de microprocesor
Proiectarea sistemului pe bază de microprocesor se va începe cu elaborarea schemei de structură sau mai bine zis a schemei bloc . Aceasta rezultă din schema bloc calculatorului cu arhitectură deschisă (fig.1) şi a schemei de structură a procesorului (fig.2).Este evident faptul că schemele bloc menţionate mai sus permit de a forma corect schema bloc a sistemului pe bază de microprocesor , însă pentru a înţelege cum vor interacţiona blocurile sistemului în procesul de lucru , vom analiza regimurile de funcţionare ale dispozitivelor de calcul .
În procesul de funcţionare a dispozitivului de calcul acesta se poate afla în următoarele regimuri de funcţionare :
1.Regimul de executare liniară a programului :Constă în executarea pe rînd în procesor a instrucţiunilor programului.În procesor se formează adresa instrucţiunii următoare , adresa se transmite prin magistrala de adrese MA însoţită de semnalul MRD( memory read ) .Prin magistrala de date MD se transmite instrucţiunea, iar în procesor are loc decodificarea instrucţiunii ,mai apoi se organizează ciclul de executare a instrucţiunii.Ca urmare procesorul trece din nou la formare adresei instrucţiunii următoare , aceasta asigură executarea automată a instrucţiunilor una după alta . La terminarea programului se trece în regim de oprire aceasta se cu instrucţiunea HLT .
Fig.30 Schema bloc a regimului de executare liniară a programului
UTM.FRT.TLC-10135 - 35 - - 35 -
Coala
Mod Coala Nr. Document Semnăt. Data
2.Regimul de oprire :Are loc la executarea instrucţiunii HLT , care se efectuează în următoarele etape:
- Mai întîi se decodifică instrucţiune HLT .- Adresa instrucţiunii următoare nu se formează şi nu se transmite, microprocesorul nu efectuează nici o acţiune .
Din starea de oprire procesorul poate fi scos numai cu semnalul RESET , în prezent acest regim se utilizeză foarte rar.
3. Regimul de aşteptare :Acest regim apare la schimbul de informaţie între procesor şi un dispozitiv mai lent ca exemplu poate fi memoria.Regimul de aşteptare se caracterizeză prin faptul că procesorul transmite în memorie adresa celulei şi comanda MRD .Din regimul de aşteptare procesorul poate fi scos numai cu unul din semnale: READY –activ , RESET- iniţializare cu cerere de întrerupere.
Fig.31 Schema bloc a regimului de aşteptare
4.Regimul de întrerupere:Constă în întreruperea procesului de executare a programului la cererea unui dispozitiv extern. Procesorul recepţionează semnalul de cerere de întrerupere INT, analizează posibilitatea efectuării întreruperii, termină executarea instrucţiunii curente şi întrerupe executarea programului. Datele curente sînt salvate în memoria stivă şi mai tîrziu executarea programului poate fi reluată.
Procesorul generează un răspuns INTA dispozitivului extern şi trece la executarea unui program de tratare a întreruperii.
UTM.FRT.TLC-10136 - 36 - - 36 -
Coala
Mod Coala Nr. Document Semnăt. Data
Fig.32 Schema bloc a regimului de întrerupere5.Regimul de acces direct la memorie
Constă în schimbul de date între memorie şi DE. Se utilizează pentru transmiterea volumelor mari de informaţie. DE transmite un semnal de cerere de acces direct la memorie HLD (HOLD). Procesorul recepţionează acest semnal şi analizează posibilitatea accesului şi dacă se permite, generează un semnal de răspuns – HLDA. După aceasta se permite utilizarea magistralelor de către DE, care efectuează schimbul. La terminarea schimbului de date se reia executarea programului întrerupt.
Fig.33 Schema bloc a regimului de acces direct la memorie
Conform regimurilor de funcţionare ale dispozitivelor de calcul , am stabilit cum are loc interacţiunea dintre blocurile sistemului pe bază de microprocesor .
UTM.FRT.TLC-10137 - 37 - - 37 -

Coala
Mod Coala Nr. Document Semnăt. Data
Datorită capitolelor anterioare am stabilit care este bloc sistemului pe bază de microprocesoului K 1810BM88Rezultatul acestui studiu este obţinerea schemei de structură generalizată a dispozitivului pe bază de microprocesor, care ulterior ne va piermite formarea schemei de structură detaliată a dispozitivului pe bază de microprocesor . Schema de structură detaliată va oferi o descriere mai concretă a fiecărui bloc împarte şi a semnalelor de la intrarea şi ieşirea blocului dat.
Fig.34 Schema bloc sistemului pe bază de microprocesor.
Toate blocurile sistemului pe bază de microprocesor sunt conectate la Interfaţa de sistem Care conţine Cuple pentru extensii care nu reprezintă altceva decît nişte sloturi PCI,pe care se conecta blocurilor adăugătoare .
UTM.FRT.TLC-10138 - 38 - - 38 -
Coala
Mod Coala Nr. Document Semnăt. Data
Concluzii
Conform caracteristicilor proiectului am elaborat schemele bloc ale unităţilor în parte apoi
am selectat microcircuitele necesare şi corespunzătoare reieşind din caracteristicile impuse. După
schemele bloc am efectuat schemele electrice pe anumite porţiuni. După ce am efectuat schemele
electrice pe porţiuni împreunîndu-le la un loc am obţinut schema electrică principială a sistemului
pe microprocesor în întregime. În ultimul pas am descris funcţionarea şi caracteristicile
microcircuitelor utilizate în proiectul dat şi am studiat funcţionarea în întregime a întregului
sistem.
Sistemul pe bază de microprocessor pe care l-am proiectat reprezintă baza de proiectare
şi construcţie a tuturor calculatoarelor , în cardru proectului sunt descriese principile
fundamentale care stau la baza creării calculatoarelor contemporane.
UTM.FRT.TLC-10139 - 39 - - 39 -

Coala
Mod Coala Nr. Document Semnăt. Data
BIBLIOGRAFIE
1. Артюхов В.Г.«Проектирование микропроцессорной электронно-вычеслителъной
аппаратуры.» Справочник. Киев «Техника» 1988.
2.«Цифровые и аналоговые интегральные микросхемы». Справочник под ред. С.В.Якубовского. Москва. «Радио и связь»,1990.3. «Микропроцессоры и микропроцессорные комплекты интегральных микросхем».Справочник. 2т. под ред. В.А.Шахнова. Москва. «Радио и связь»,1988
4. Е.П.Угрюмов. «Проектирование элементов и узлов ЭВМ» Москва. «Высшая школа»,1987.
UTM.FRT.TLC-10140 - 40 - - 40 -