multisensor mobile robot localization - robotics and …webdiis.unizar.es/~neira/anexos/cl6.pdf ·...
TRANSCRIPT

Neira: Multisensor mobile robot localization - Google Scholar http://scholar.google.com/scholar?num=100&hl=en&lr=&cites=1534...
1 de 4 15/02/2008 20:46
Web Images Video News Maps more »
Search Advanced Scholar SearchScholar PreferencesScholar Help
Scholar Results 1 - 21 of 21 citing Neira: Multisensor mobile robot localization. (0.08 seconds)
All Results
I OhyaJ NeiraA KosakaA KakJ Tardos
Vision-based navigation by a mobile robot with obstacle avoidanceusingsingle-camera vision and … - all 3 versions »I Ohya, A Kosaka, A Kak - Robotics and Automation, IEEE Transactions on, 1998 - ieeexplore.ieee.orgV. C ONCLUSION This paper presents results of odometric accuracy tests performed with a new, commercially available mobile robot called “OmniMate.” The OmniMate provides true omnidirectional (ie, holonomous) motion and its ... Cited by 69 - Related Articles - Web Search - Import into BibTeX
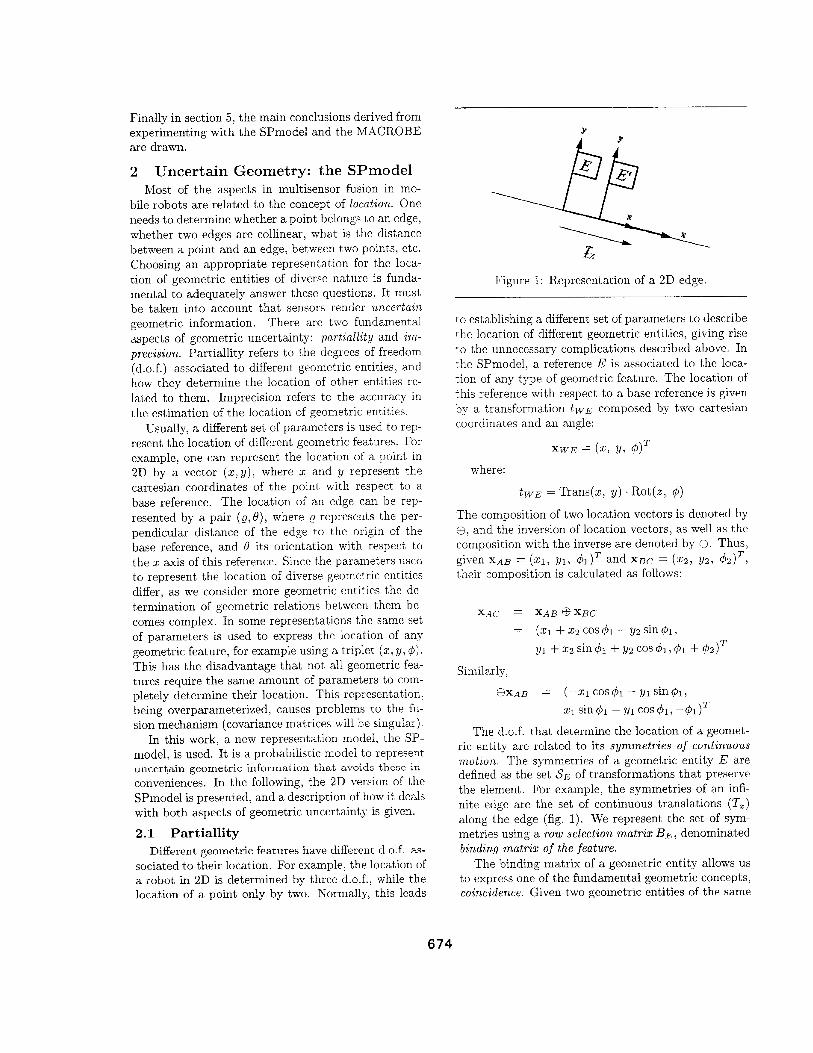
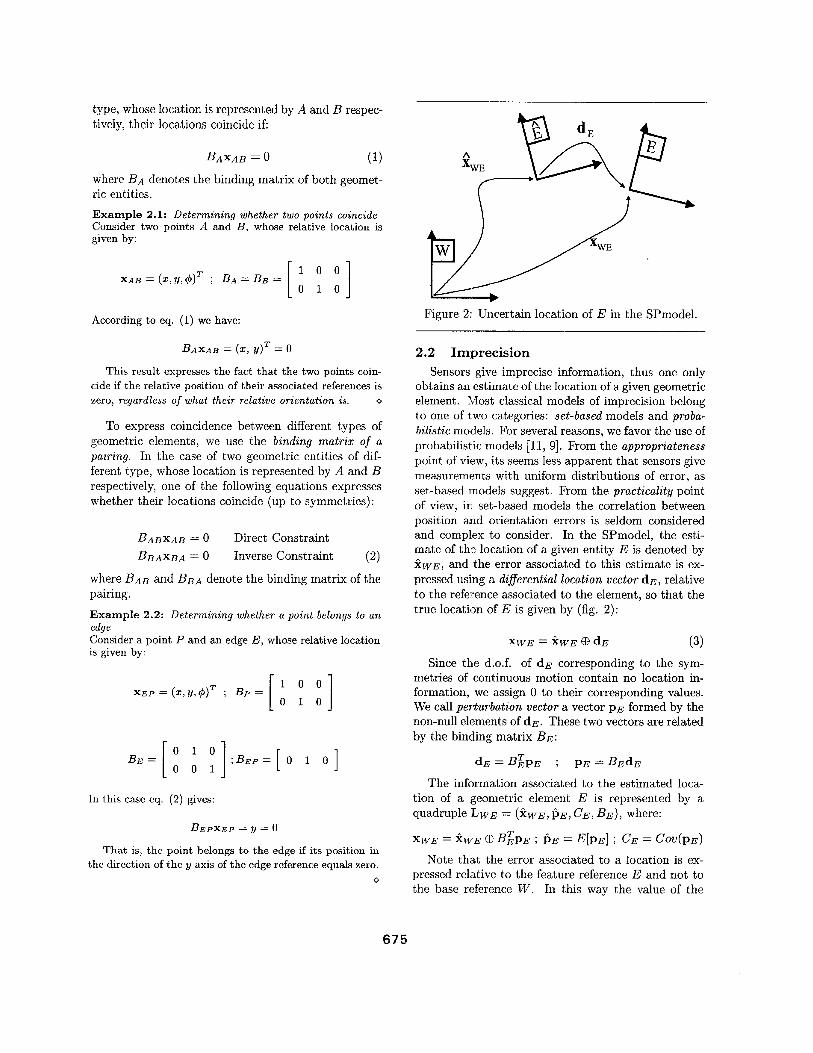
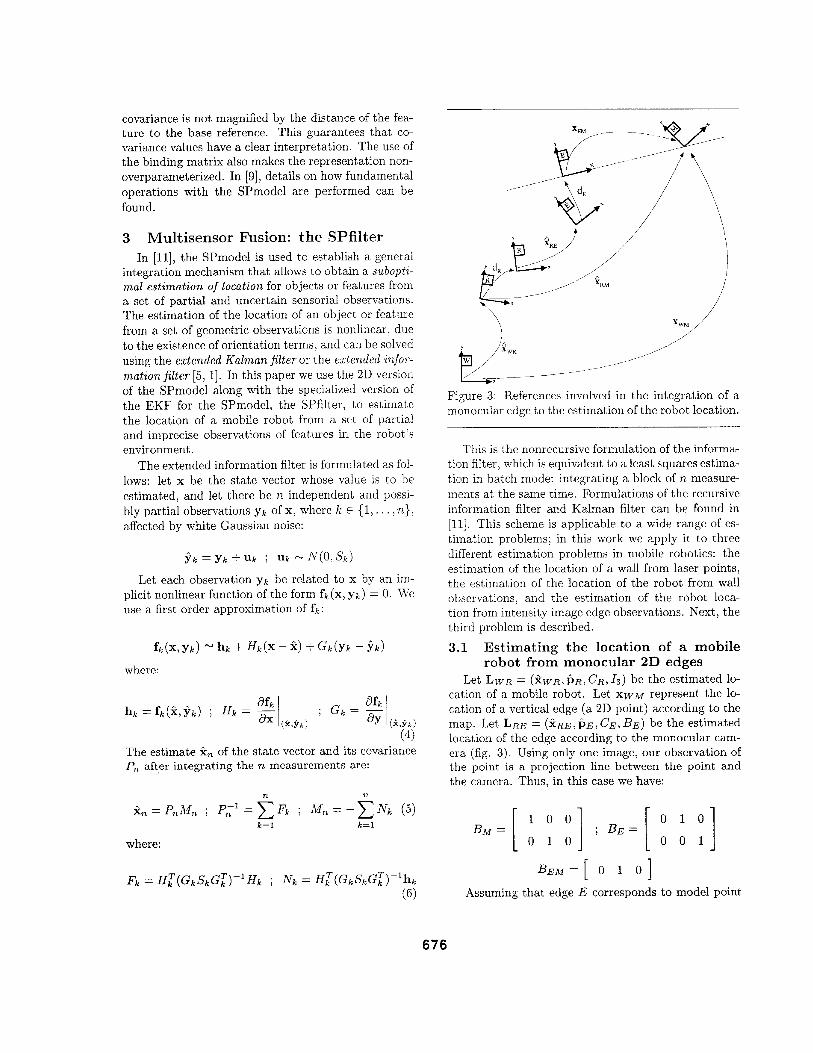
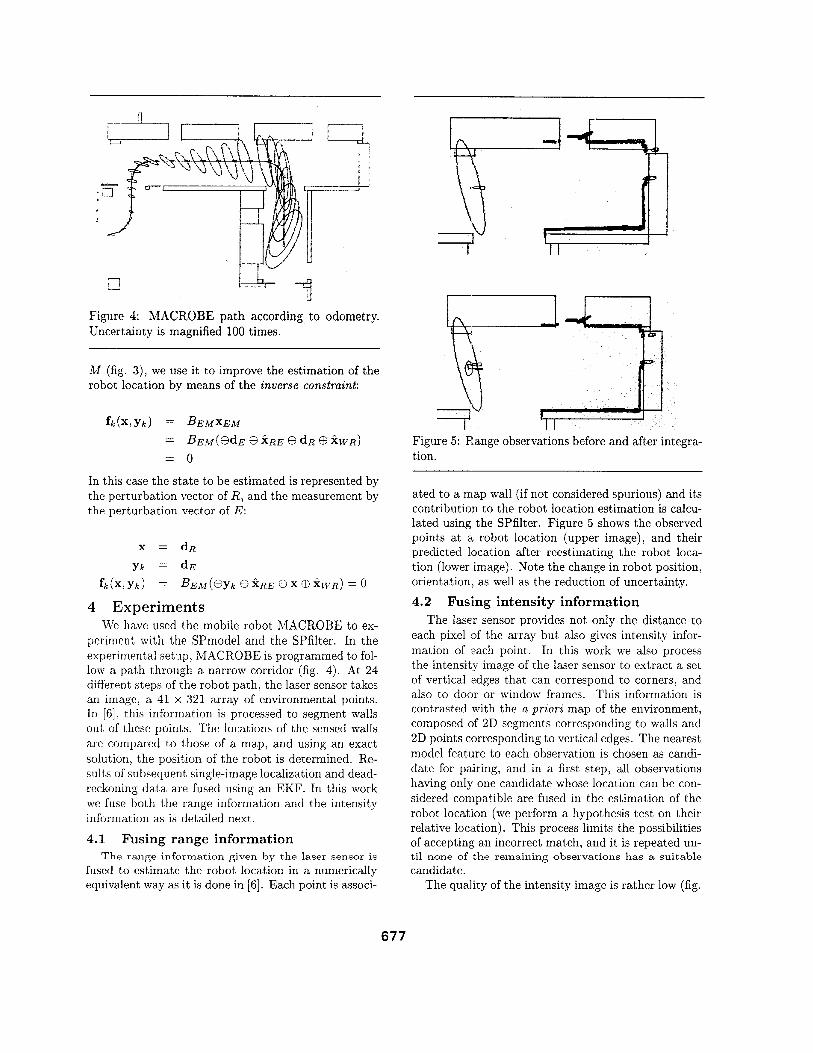
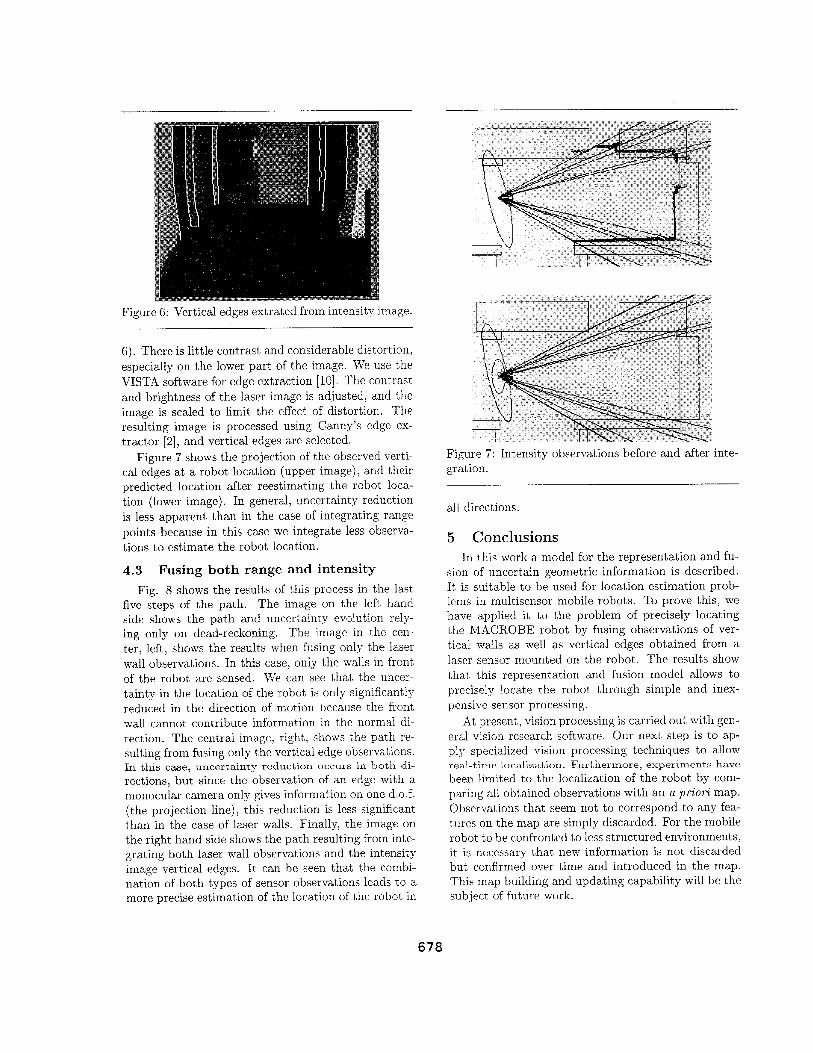
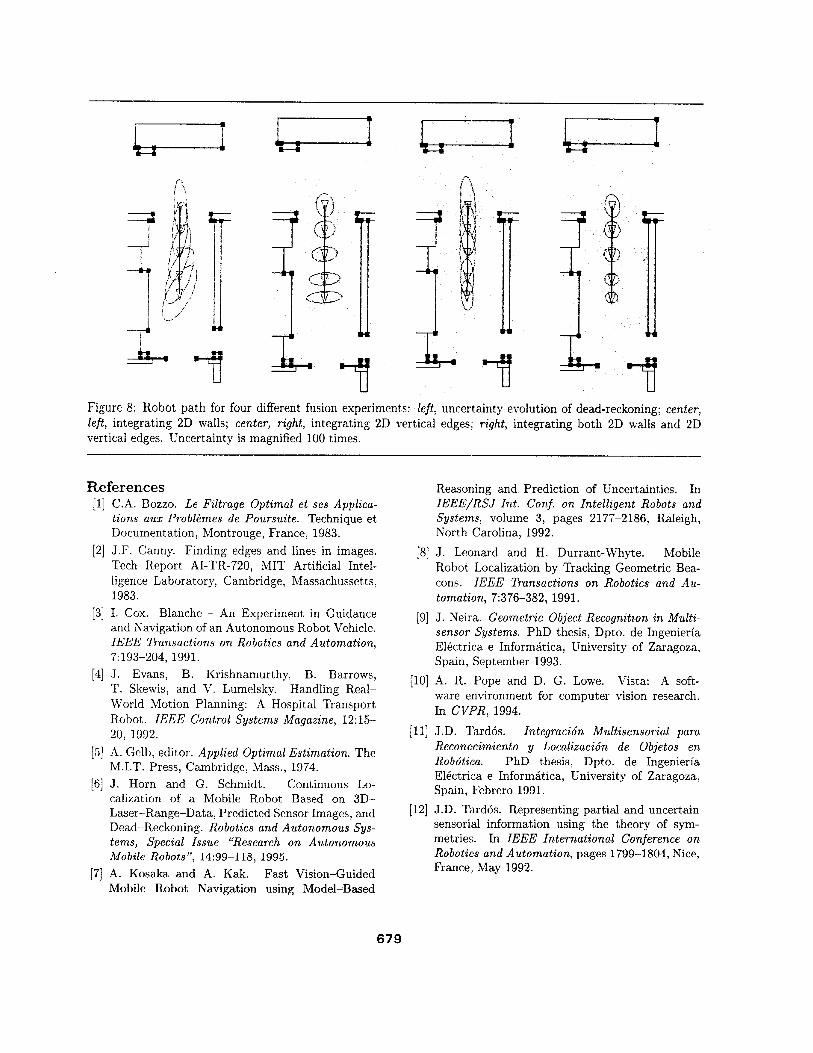
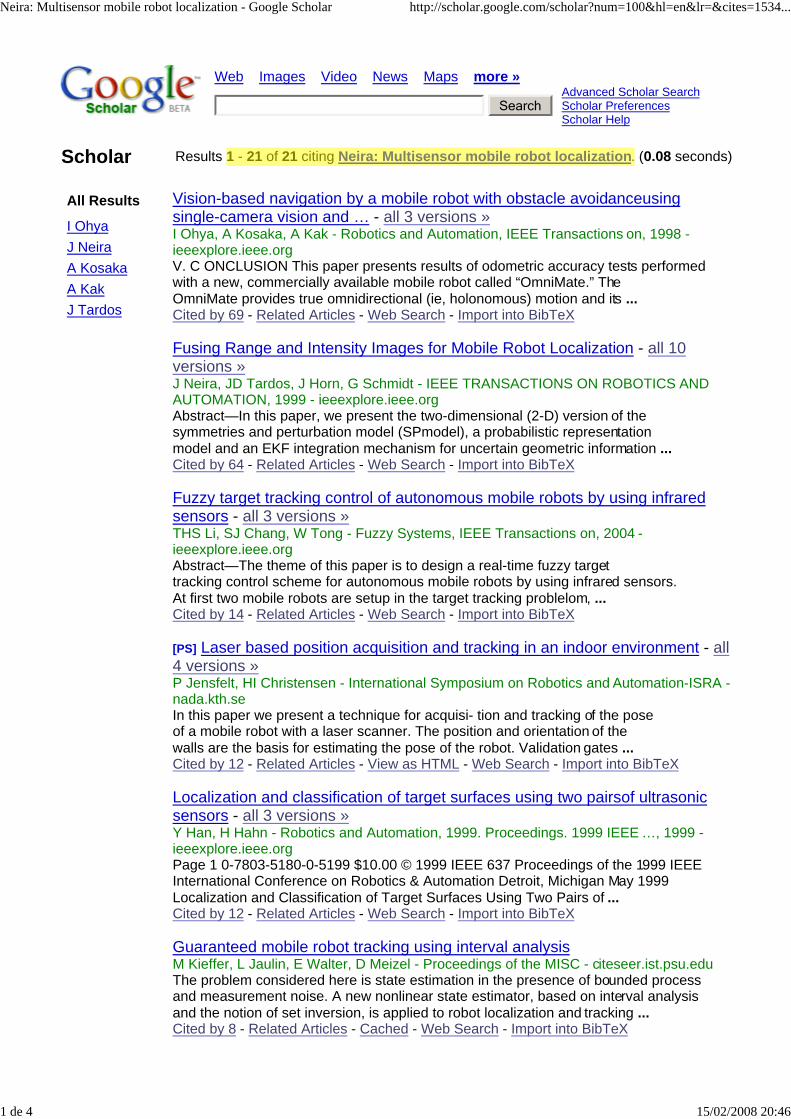
Fusing Range and Intensity Images for Mobile Robot Localization - all 10 versions »J Neira, JD Tardos, J Horn, G Schmidt - IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, 1999 - ieeexplore.ieee.orgAbstract—In this paper, we present the two-dimensional (2-D) version of the symmetries and perturbation model (SPmodel), a probabilistic representation model and an EKF integration mechanism for uncertain geometric information ... Cited by 64 - Related Articles - Web Search - Import into BibTeX
Fuzzy target tracking control of autonomous mobile robots by using infrared sensors - all 3 versions »THS Li, SJ Chang, W Tong - Fuzzy Systems, IEEE Transactions on, 2004 - ieeexplore.ieee.orgAbstract—The theme of this paper is to design a real-time fuzzy target tracking control scheme for autonomous mobile robots by using infrared sensors. At first two mobile robots are setup in the target tracking problelom, ... Cited by 14 - Related Articles - Web Search - Import into BibTeX
[PS] Laser based position acquisition and tracking in an indoor environment - all 4 versions »P Jensfelt, HI Christensen - International Symposium on Robotics and Automation-ISRA - nada.kth.seIn this paper we present a technique for acquisi- tion and tracking of the pose of a mobile robot with a laser scanner. The position and orientation of the walls are the basis for estimating the pose of the robot. Validation gates ... Cited by 12 - Related Articles - View as HTML - Web Search - Import into BibTeX
Localization and classification of target surfaces using two pairsof ultrasonic sensors - all 3 versions »Y Han, H Hahn - Robotics and Automation, 1999. Proceedings. 1999 IEEE …, 1999 -ieeexplore.ieee.orgPage 1 0-7803-5180-0-5199 $10.00 © 1999 IEEE 637 Proceedings of the 1999 IEEE International Conference on Robotics & Automation Detroit, Michigan May 1999 Localization and Classification of Target Surfaces Using Two Pairs of ... Cited by 12 - Related Articles - Web Search - Import into BibTeX
Guaranteed mobile robot tracking using interval analysisM Kieffer, L Jaulin, E Walter, D Meizel - Proceedings of the MISC - citeseer.ist.psu.eduThe problem considered here is state estimation in the presence of bounded processand measurement noise. A new nonlinear state estimator, based on interval analysisand the notion of set inversion, is applied to robot localization and tracking ... Cited by 8 - Related Articles - Cached - Web Search - Import into BibTeX

Neira: Multisensor mobile robot localization - Google Scholar http://scholar.google.com/scholar?num=100&hl=en&lr=&cites=1534...
2 de 4 15/02/2008 20:46
Detecting high level features for mobile robot localization - all 4 versions »JA Castellanos, J Neira, O Strauss, JD Tardos - Multisensor Fusion and Integration forIntelligent Systems, …, 1996 - ieeexplore.ieee.orgProceedings of the 1996 IEEE/SICE/RSJ International Conference on Multisensor Fusion and Integration for Intelligent Systems ... J. A. Castellanost J. Neirat 0. StraussJ JD Tard6sl ... ‘Departamento de InformStica e Ingenieria de ... Cited by 5 - Related Articles - Web Search - Import into BibTeX
[PS] Localization using laser scanning and minimalistic environmental models - all 3 versions »P Jensfelt - Licentiate thesis, Automat. Contr. Dept., Royal Inst. …, 1999 - nada.kth.sePage 1. Localization Using Laser Scanning and Minimalistic Environmental ModelsPatric Jensfelt TRITA{S3{REG{ 9902 ISSN 0347-1071 Automatic Control Department ofSignals, Sensors and Systems Royal Institute of Technology Stockholm, Sweden ... Cited by 4 - Related Articles - View as HTML - Web Search - Import into BibTeX
Role of laser sensor systems in automation and flexible manufacturing - all 4 versions »H Golnabi - Robotics and Computer Integrated Manufacturing, 2003 - ElsevierNew industries and production plants require a flexible system, which is capable of picking up objects of various shapes, weights, and colors with arbitrary position and orientation. Such a system also needs recognition and guiding ... Cited by 2 - Related Articles - Web Search - Import into BibTeX
[PDF] Shared Control of Multiple-Manipulator, Sensor-Based Telerobotic SystemsRLW II, FW Harrison, DI Soloway - IEEE International Conference on Automation andRobotics, …, 1997 - ent.ohiou.eduPage 1. Shared Control of Multiple-Manipulator, Sensor-Based TeleroboticSystems Robert L. Williams II Ohio University Athens, Ohio F. WallaceHarrison NASA Langley Research Center Hampton, VA ... Cited by 1 - Related Articles - View as HTML - Web Search - Import into BibTeX
[BOOK] Aplicación del muestreo Bayesiano en robots móviles: Estrategias paralocalización y estimación de … - all 2 versions »DG López, RR Aldeguer, FE Ruiz, Universidad de … - 1999 - dccia.ua.esEn cualquier proyecto de investigación, y en una tesis doctoral en especial, es fundamental tener alrededor buenos compañeros con los que compartir el trabajo y las experiencias. Esta tesis no hubiera sido posible sin las muchas ... Cited by 1 - Related Articles - View as HTML - Web Search - Import into BibTeX - Buscar en Rebiun
[PDF] Jose Neira, Mar a Isabel Ribeiro, Juan Domingo Tardos - all 2 versions »CPS CPS, T Norte-Piso, AR Pais - webdiis.unizar.esUniversidad de Zaragoza Centro Politecnico Superior (CPS) Departamento de Informatica e Ingenier a de Sistemas c/Mar a de Luna, 3, E-50015 Zaragoza, SPAIN email: [email protected], [email protected] Related Articles - View as HTML - Web Search - Import into BibTeX
[PDF] CONTROL ARCHITECTURE FOR TELEROBOTIC SYSTEMSRLW II - ent.ohiou.eduA control architecture is presented for real-time, sensor-based, shared control of remote, multiple- manipulator telerobotic systems. The system allows teleoperation, autonomy, or a combination (shared, telerobotic control). ... Related Articles - View as HTML - Web Search - Import into BibTeX
Kok Seng ChongL Kleeman - The International Journal of Robotics Research, 1999 - ingentaconnect.comThis paper describes a mobile robot equipped with a sonar sensor array in a guided, feature-based map-building task in an indoor environment. The landmarks
Neira: Multisensor mobile robot localization - Google Scholar http://scholar.google.com/scholar?num=100&hl=en&lr=&cites=1534...
3 de 4 15/02/2008 20:46
common to indoor environments are planes, corners, and edges, and these are ... Related Articles - Web Search - Import into BibTeX
[PDF] Jose A. Castellanos Juan D. Tardos Jose Neira - all 2 versions »CBMR LOCALIZATION - mit.bme.huAbstract. Mobile Robot Localization is a fundamental problem to solve when navigating in an indoor structured environment. This problem might be stated as a match- ing problem between sensor observations and model fea- tures of an ... Related Articles - View as HTML - Web Search - Import into BibTeX
[PDF] Analysis, Architecture, and Fusion Methods for Vehicle AutomationCA BORJA, S DE MONTERREY - www-iri.upc.esJose Luis Gordillo Moscoso, ITESM Campus Monterrey Josep Maria Mirats Tur, Institut de Rob`otica i Inform`atica Industrial Rogelio Soto Rodrıguez, ITESM Campus Monterrey Ricardo Ambrocio Ramırez Mendoza, ITESM Campus Monterrey ... View as HTML - Web Search - Import into BibTeX
The development of an autonomous service robot.Implementation:“Lucas”—The library assistant robotJ Behan, DT O’Keeffe - Intelligent Service Robotics, 2008 - SpringerAbstract This paper describes an autonomous mobile device that was designed, developed and implemented as a libraryassistantrobot.Acompleteautonomoussystemincor- porating ... Web Search - Import into BibTeX - BL Direct
[PS] Instituto de Sistemas e Robótica - all 23 versions »P de Lisboa - welcome.isr.ist.utl.ptThe experiment performed here consists of the development of an algorithm in which a mobile robot located in a completely unknown environment should nd the goal and, in a sequence of trials, establish the shortest way to reach it. ... Related Articles - View as HTML - Web Search - Import into BibTeX
Aplicación del muestreo bayesiano en robots móviles: estrategias paralocalización y estimación de … - all 2 versions »T de Doctorado - descargas.cervantesvirtual.comEn cualquier proyecto de investigación, y en una tesis doctoral en especial, es fundamental tener alrededor buenos compañeros con los que compartir el trabajo y las experiencias. Esta tesis no hubiera sido posible sin las muchas ... Related Articles - Web Search - Import into BibTeX
[PDF] date. issued 2000 en_US - all 4 versions »D les Collections - Traitement du Signal, 2000 - irevues.inist.frTraitement du Signal 2000 – Volume 17 – n°4 269 ... Hydro-Québec (IREQ)1800 boul. Lionel-Boulet, Varennes, Québec, Canada, J3X 1S1Courriel : leonard.franç[email protected] ... La Transformée de Fourier à Court Terme ... Related Articles - View as HTML - Web Search - Import into BibTeX
[PDF] date. issued 2000 en_US - all 2 versions »A dans les Collections - Traitement du Signal, 2000 - documents.irevues.inist.frWe present a new image sequence analysis method for automatic and real-time extraction of transitory and complex motions in natural scenes. We show how to extract these motions as multidimensional point clusters obtained from the ... Related Articles - View as HTML - Web Search - Import into BibTeX
Search

Neira: Multisensor mobile robot localization - Google Scholar http://scholar.google.com/scholar?num=100&hl=en&lr=&cites=1534...
4 de 4 15/02/2008 20:46
Google Home - About Google - About Google Scholar
©2008 Google
http://www.accesowok.fecyt.es/login/
2 de 2 15/02/2008 20:47
Signed In My EndNote Web My ResearcherID My Citation Alerts My Journal List My Saved Searches
Search Cited Reference Search Structure Search Advanced Search Search History Marked List (0)
Web of Science®
<< Back to previous
Results Cited Author=(Neira J) AND Cited Year=(1996)Timespan=All Years. Databases=SCI-EXPANDED.
Results: 6 Page of 1 Sort by: LateLate
Refine Results Search within results for
Subject Areasgfedc ROBOTICS (5)
gfedc AUTOMATION & CONTROL SYSTEMS (3)
gfedc ENGINEERING, ELECTRICAL & ELECTRONIC (3)
gfedc COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE (2)
gfedc COMPUTER SCIENCE, INTERDISCIPLINARY APPLICATIONS (1)
more...
Document Typesgfedc ARTICLE (6)
Authors
Source Titles
Publication Years
Institutions
Languages
Countries/Territories For more advanced refine options,
use
more options
gfedc 1. Title: Fuzzy target tracking control of autonomous mobile roboinfrared sensors Author(s): Li THS, Chang SJ, Tong WSource: IEEE TRANSACTIONS ON FUZZY SYSTEMS Volume: 1 Pages: 491-501 Published: 2004 Times Cited: 5
gfedc 2. Title: Role of laser sensor systems in automation and flexible Author(s): Golnabi HSource: ROBOTICS AND COMPUTER-INTEGRATED MANUFACT19 Issue: 1-2 Pages: 201-210 Published: 2003 Times Cited: 2
gfedc 3. Title: Localization and classification of target surfaces using twultrasonic sensors Author(s): Han Y, Hahn HSource: ROBOTICS AND AUTONOMOUS SYSTEMS Volume: 3331-41 Published: 2000 Times Cited: 0
gfedc 4. Title: Fusing range and intensity images for mobile robot localAuthor(s): Neira J, Tardos JD, Horn J, et al.Source: IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATIO Issue: 1 Pages: 76-84 Published: 1999 Times Cited: 17
gfedc 5. Title: Mobile-robot map building from an advanced sonar arrayodometry Author(s): Chong KS, Kleeman LSource: INTERNATIONAL JOURNAL OF ROBOTICS RESEARCH Issue: 1 Pages: 20-36 Published: 1999 Times Cited: 14
gfedc 6. Title: Vision-based navigation by a mobile robot with obstacle single-camera vision and ultrasonic sensing Author(s): Ohya A, Kosaka A, Kak ASource: IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATIO
1