multi-bernoulli filter for target tracking with multi-static doppler only measurement
TRANSCRIPT

Contents lists available at ScienceDirect
Signal Processing
Signal Processing 108 (2015) 102–110
http://d0165-16
n CorrE-m
duyong1 Sp
journal homepage: www.elsevier.com/locate/sigpro
Multi-Bernoulli filter for target tracking with multi-staticDoppler only measurement
Ma Liang a,n,1, Du Yong Kim b, Xue Kai a
a College of Mechanical and Electrical Engineering, Harbin Engineering University, Harbin, Heilongjiang, Chinab School of Electrical, Electronic, and Computer Engineering, University of Western Australia, Crawley, Australia
a r t i c l e i n f o
Article history:Received 28 August 2013Received in revised form11 August 2014Accepted 10 September 2014Available online 21 September 2014
Keywords:Multi-static DopplerTarget trackingMulti-Bernoulli filterSensor-target geometryMulti-sensor fusion
x.doi.org/10.1016/j.sigpro.2014.09.01384/& 2014 Elsevier B.V. All rights reserved.
esponding author.ail addresses: [email protected] ([email protected] (D.Y. Kim), [email protected] by China Scholarship Council.
a b s t r a c t
Multi-static Doppler-shift has re-emerged recently in the target tracking literature alongwith passive sensing, especially for aircraft tracking. Tracking with multi-static Doppleronly measurement requires efficient multi-sensor fusion approach and optimal sensornetwork configuration if possible. In this paper, we present a solution for multi-targettracking with Doppler only measurements using the multi-Bernoulli filter. To utilizeDoppler measurements from multiple sensors, we investigate different multi-sensorfusion schemes and the sensor-target geometry analysis for optimal multi-static Dopplersensor network configuration. Sensor-target geometry analysis is presented to investigateoptimal multi-static Doppler sensor network configuration. Numerical results verify thatthe proposed sequential Monte Carlo (SMC) multi-Bernoulli filter with sequential updatescheme and using the carefully chosen network shows good performance.
& 2014 Elsevier B.V. All rights reserved.
1. Introduction
Multi-target tracking with a time-varying number oftargets is a challenging problem [5,8,12,13]. It has beentackled using different types of data association methodssuch as joint probability data association (JPDA) [5,8,9],multiple hypothesis tracking (MHT) [2,15]. However, theysuffer from the exponentially growing computationalcomplexity with respect to target number. Regarding thisissue, random finite set (RFS) based Bayesian frameworkhas emerged as a powerful approach in multi-targettracking that by-passes data association. For illustration,the probability hypothesis density (PHD) filter uses the 1storder statistical moment (intensity function) to approx-imate the multi-target posterior density [13] which hasbeen widely applied to different applications [10,11,17].
. Liang),u.cn (X. Kai).
The Cardinalized PHD (CPHD) filter was established toimprove the accuracy of the PHD filter, especially in theestimation of target number [14]. As another type of RFS,the multi-Bernoulli representation is used to approximatethe multi-target posterior, called the multi-Bernoulli filter[25].
Doppler-shift frequency has been used in radar trackingsystem for a long history [3,16,26,28]. Recently, multi-static Doppler has re-emerged in passive localization andtracking, which uses commercial broadcasters such as FMradio, GSM base station or “illuminators of opportunity”[18]. The receiver of Doppler sensing network is compactand imperceptible, which is crucial in applications such asaircraft tracking. Multi-static Doppler along with othermeasurements such as bearing or bistatic range has beenused for tracking [4,22]. Also, there are relevant researchconcerning tracking with multi-static Doppler only mea-surement. In [7], it is shown that Gaussian Mixture PHDfilter with multi-static Doppler only measurement is ableto perform multi-target tracking in practice. Ref. [18]explores a joint detection and tracking scheme to use

Fig. 1. Doppler in 2D Cartesian coordinate, αðiÞ and θ denote the angularposition of receiver and transmitter.
M. Liang et al. / Signal Processing 108 (2015) 102–110 103
multi-static Doppler only measurement for single targettracking. However, none of these work discuss the multi-target tracking performance with respect to multi-staticDoppler only measurement.
To the best of the authors' knowledge, there is nocomprehensive literature concerning multi-target trackingwith multi-static Doppler measurement only so far. In thispaper, we consider the multi-target tracking problemusing multi-static Doppler only measurement consideringfollowing issues: highly nonlinear measurement model,sensor-geometry which significantly affect the sensingaccuracy, time-varying number of targets, and data fusionproblem in order to utilize multiple measurements. Wechoose the multi-Bernoulli filter for tracking with multi-static Doppler measurements due to its computationalefficiency compared to data association method, whichoutweighs the PHD/CPHD filter in the SMC implementa-tion since the state extraction in multi-Bernoulli filter notdependent upon the heuristics in clustering but exactextraction from Bernoulli parameters. In addition, weincorporate the multi-Bernoulli filter into different multi-senor fusion schemes. Optimal sensor network configura-tion of multi-static Doppler measurement is also pre-sented to demonstrate tracking performance with respectto sensor-target geometry.
The paper is organized as follows. Section 2 presents ashort review of basic knowledge about RFS based Bayesianfiltering, observation model of multi-static Doppler mea-surement and multi-sensor fusion schemes. Section 3illustrates the multi-Bernoulli filter in different fusionschemes for multi-target tracking and provides implemen-tation details. In Section 4, geometry of multi-staticDoppler sensor network is analyzed for optimal networkconfiguration. Section 5 shows numerical results for bothsingle and multi-target tracking, which verify proposedtracking approach and sensor-target geometry analysis.
2. Background
This section briefly introduces some basic knowledge asa foundation of following content in this paper. We firstprovide the RFS based Bayesian framework in Section 2.1.Then, Section 2.2 illustrates multi-static Doppler trackingscenario and introduces the measurement model. Section2.3 provides a discussion on existing multi-sensor fusionschemes for target tracking.
2.1. Random finite sets based Bayesian framework
Recently, the RFS has been considered as a natural andpowerful description for time-varying number of multi-target state compared to the vector description in theconventional multi-object systems [24]. Let Xk and Zkdenote sets of multiple states and observations at time kwith time-varying cardinalities N(k) and M(k) respectively:
Xk ¼ fxk;1;…; xk;NðkÞg ð1Þ
Zk ¼ fzk;1;…; zk;MðkÞg ð2ÞUsing the RFS representation, the movement of multi-
object can be described with two types of RFS: an RFS for
survival targets from previous time step Sk, and an RFS forspontaneous birth targets at current time Γk. Thus, at timek we have the predicted RFS Xk ¼ Sk [ Γk. The RFS forcurrent measurements Zk is represented as a union of twoparts: target-generated measurements Θk, and clutter Kk;thus, Zk ¼Θk [ Kk. The probabilistic description of RFS hasbeen studied regarding various types of probability dis-tributions such as Binomial, Poisson and multi-Bernoulli.Given the specific type of probability distribution, theBayesian framework for optimal estimation via RFS whichis the same form as the classical Bayesian filtering is givenas follows:
f kjk�1ðXjZ1:k�1Þ ¼Z
f kjk�1ðXjX0Þf k�1ðX0jZ1:k�1ÞδX0 ð3Þ
f kðX Z1:k�� Þ ¼ f kðZkjXÞf kjk�1ðXjZ1:k�1ÞR
f kðZkjXÞf kjk�1ðXjZ1:k�1ÞδXð4Þ
where f kjk�1ðXjZ1:k�1Þ represents the predicted posteriormulti-target density, f kjk�1ðXjX0Þ describes the multi-targettransition density, and f kðZkjXÞ is the multi-target observa-tion likelihood. Eqs. (3) and (4) represent the predictionand the update process of Bayesian recursion via RFS,respectively.
2.2. Observation model of multi-static doppler
We assume a multi-static passive sensing networkcomposed of only one transmitter and several spatiallydistributed receivers. The multi-static network is assumedto be cooperative so that all information of the transmitterand receivers are available. For simplicity and without lossof generality, the transmitter T is assumed to be located atthe origin with t0 ¼ ½s0x ; s0y �. Receivers are denoted by Ri (i ¼1,…,m), located at position si ¼ ½six; siy�. Doppler measure-ments of targets are collected by receivers as shown inFig. 1. Let ZðiÞ
k ¼ fzðiÞk;1;…; zðiÞk;MðkÞg denote the measurement setof the ith receiver and each Doppler-shift measurement forith receiver with target state ½px;k; vx;k; py;k; vy;k�T is given by
zðiÞk ¼ �vTkpk�si
Jpk�si Jþ pk�t0Jpk�t0 J
� �f scþωðiÞ
k ð5Þ
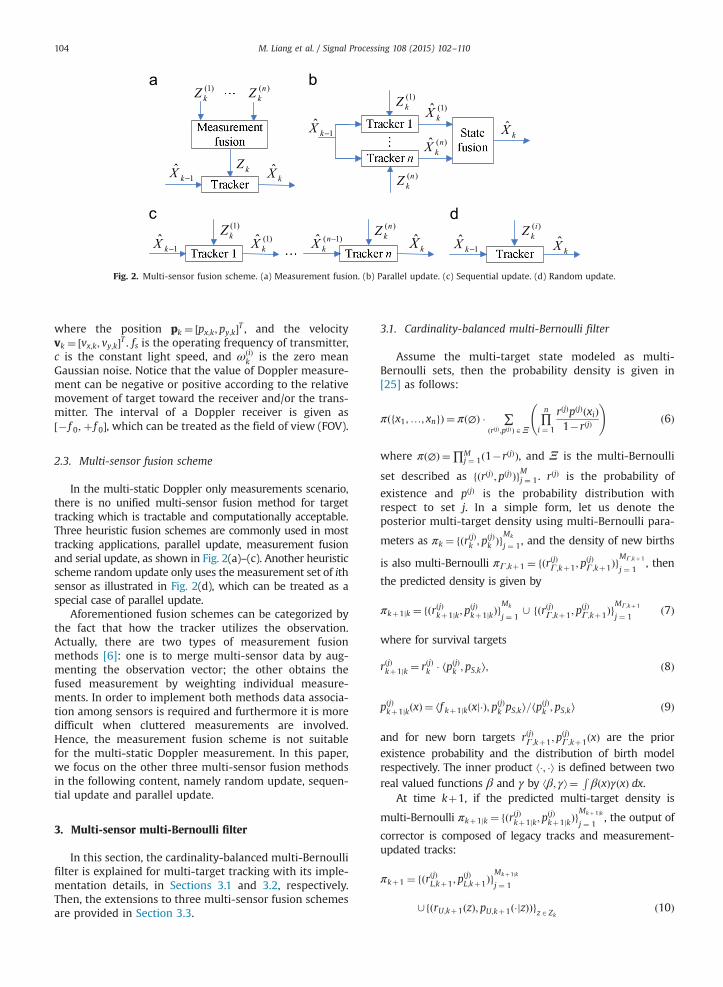
Fig. 2. Multi-sensor fusion scheme. (a) Measurement fusion. (b) Parallel update. (c) Sequential update. (d) Random update.
M. Liang et al. / Signal Processing 108 (2015) 102–110104
where the position pk ¼ ½px;k;py;k�T , and the velocityvk ¼ ½vx;k; vy;k�T . fs is the operating frequency of transmitter,c is the constant light speed, and ωðiÞ
k is the zero meanGaussian noise. Notice that the value of Doppler measure-ment can be negative or positive according to the relativemovement of target toward the receiver and/or the trans-mitter. The interval of a Doppler receiver is given as½� f 0; þ f 0�, which can be treated as the field of view (FOV).
2.3. Multi-sensor fusion scheme
In the multi-static Doppler only measurements scenario,there is no unified multi-sensor fusion method for targettracking which is tractable and computationally acceptable.Three heuristic fusion schemes are commonly used in mosttracking applications, parallel update, measurement fusionand serial update, as shown in Fig. 2(a)–(c). Another heuristicscheme random update only uses the measurement set of ithsensor as illustrated in Fig. 2(d), which can be treated as aspecial case of parallel update.
Aforementioned fusion schemes can be categorized bythe fact that how the tracker utilizes the observation.Actually, there are two types of measurement fusionmethods [6]: one is to merge multi-sensor data by aug-menting the observation vector; the other obtains thefused measurement by weighting individual measure-ments. In order to implement both methods data associa-tion among sensors is required and furthermore it is moredifficult when cluttered measurements are involved.Hence, the measurement fusion scheme is not suitablefor the multi-static Doppler measurement. In this paper,we focus on the other three multi-sensor fusion methodsin the following content, namely random update, sequen-tial update and parallel update.
3. Multi-sensor multi-Bernoulli filter
In this section, the cardinality-balanced multi-Bernoullifilter is explained for multi-target tracking with its imple-mentation details, in Sections 3.1 and 3.2, respectively.Then, the extensions to three multi-sensor fusion schemesare provided in Section 3.3.
3.1. Cardinality-balanced multi-Bernoulli filter
Assume the multi-target state modeled as multi-Bernoulli sets, then the probability density is given in[25] as follows:
π fx1;…; xngð Þ ¼ π ∅ð Þ � ∑ðrðjÞ ;pðjÞÞAΞ
∏n
i ¼ 1
rðjÞpðjÞðxiÞ1�rðjÞ
!ð6Þ
where πð∅Þ ¼∏Mj ¼ 1ð1�rðjÞÞ, and Ξ is the multi-Bernoulli
set described as fðrðjÞ; pðjÞÞgMj ¼ 1. rðjÞ is the probability of
existence and pðjÞ is the probability distribution withrespect to set j. In a simple form, let us denote theposterior multi-target density using multi-Bernoulli para-
meters as πk ¼ fðrðjÞk ;pðjÞk ÞgMk
j ¼ 1, and the density of new births
is also multi-Bernoulli πΓ;kþ1 ¼ fðrðjÞΓ;kþ1; pðjÞΓ;kþ1Þg
MΓ;kþ 1
j ¼ 1, then
the predicted density is given by
πkþ1jk ¼ fðrðjÞkþ1jk; pðjÞkþ1jkÞg
Mk
j ¼ 1[ fðrðjÞΓ;kþ1; p
ðjÞΓ;kþ1Þg
MΓ;kþ 1
j ¼ 1ð7Þ
where for survival targets
rðjÞkþ1jk ¼ rðjÞk � ⟨pðjÞk ; pS;k⟩; ð8Þ
pðjÞkþ1jkðxÞ ¼ ⟨f kþ1jkðxj�Þ; pðjÞk pS;k⟩=⟨pðjÞk ; pS;k⟩ ð9Þ
and for new born targets rðjÞΓ;kþ1; pðjÞΓ;kþ1ðxÞ are the prior
existence probability and the distribution of birth modelrespectively. The inner product ⟨�; �⟩ is defined between tworeal valued functions β and γ by ⟨β; γ⟩¼ R
βðxÞγðxÞ dx.At time kþ1, if the predicted multi-target density is
multi-Bernoulli πkþ1jk ¼ fðrðjÞkþ1jk;pðjÞkþ1jkÞg
Mkþ 1jk
j ¼ 1, the output of
corrector is composed of legacy tracks and measurement-updated tracks:
πkþ1 ¼ fðrðjÞL;kþ1; pðjÞL;kþ1Þg
Mkþ 1jk
j ¼ 1
[fðrU;kþ1ðzÞ; pU;kþ1ð�jzÞÞgzAZkð10Þ

M. Liang et al. / Signal Processing 108 (2015) 102–110 105
where
rðjÞL;kþ1 ¼ rðjÞkþ1jk1�⟨pðjÞkþ1jk; pD;kþ1⟩
1�rðjÞkþ1jk⟨pðjÞkþ1jk; pD;kþ1⟩
ð11Þ
pðjÞL;kþ1 xð Þ ¼ pðjÞkþ1jk xð Þ 1�pD;kþ1ðxÞ1�⟨pðjÞkþ1jk; pD;kþ1⟩
ð12Þ
rU;kþ1 zð Þ ¼∑Mkþ 1jk
j ¼ 1
rðjÞkþ1jkð1�rðjÞkþ1jkÞ⟨pðjÞkþ1jk;ψ k;z⟩
ð1�rðjÞkþ1jk⟨pðjÞkþ1jk; pD;kþ1⟩Þ2
κkþ1 zð Þþ∑Mkþ 1jkj ¼ 1
rðjÞkþ1jk⟨pðjÞkþ1jk;ψ k;z⟩
1�rðjÞkþ1jk⟨pðjÞkþ1jk; pD;kþ1⟩
ð13Þ
pU;kþ1 zð Þ ¼∑Mkþ 1jk
j ¼ 1
rðjÞkþ1jk1�rðjÞkþ1jk
pðjÞkþ1jk xð Þψ k;z xð Þ
∑Mkþ 1jkj ¼ 1
rðjÞkþ1jk1�rðjÞkþ1jk
⟨pðjÞkþ1jk;ψ k;z⟩
ð14Þ
ψ kþ1;zðxÞ ¼ gkþ1ðzjxÞpD;kþ1ðxÞ; ð15ÞpS and pD are the probabilities of survival and detectionrespectively. Note that we refer the Cardinality-Balancedmulti-Bernoulli filter as “multi-Bernoulli” filter in this paperwithout loss of generality and for simplicity.
3.2. Implementation and state extraction
The SMC method is adopted for implementation inorder to handle the highly nonlinear measurement modelof multi-static Doppler measurement. Here, we describethe pseudo-code for SMC implementation of the multi-Bernoulli filter as in Algorithm 1. Refer the readers sub-section IV-A of [25] for detailed equations.
To avoid the infinite growth of multi-Bernoulli setnumber, those with existence probability less than apredefined threshold (e.g., 0.01) are removed. Choosingthe threshold to limit the growth of set number requires tobalance the accuracy and efficiency of the multi-Bernoullifilter. Meanwhile, the particle number is limited betweenLmin and Lmax, in case that sampling is not enough orresampling reallocates too many particles. Lmin and Lmax
should be properly set with respect to the nonlinearity andnoise of the system (use bigger Lmin and Lmax for highlynonlinear model and/or strong noise). The number ofparticles for each Bernoulli set is proportional to eachtarget existence rðjÞ during the resampling step. The mer-ging technique in [23] is adopted for parallel update. Witha given existence threshold 0.75, those sets with rðjÞk over0.75 are true tracks, while the others are not.
Algorithm 1. SMC multi-Bernoulli filter.
Prediction:Input: frðjÞk ;pðjÞk gMk
j ¼ 1
1:
for j¼ 1;…;Mk do 2: Survival particle state: for i¼ 1;…; LðjÞk , sample xðjÞS;i;kþ1jk ,compute weight ωðjÞS;i;kþ1jk and normalization ~ω ðjÞ
S;i;kþ1jk
3: Survival target existence rðjÞS;kþ1jk and distributionpðjÞS;kþ1jkðxÞ
4:
end for 5: for j¼ 1;…;MΓ;kþ1 do 6: New born particle state: for i¼ 1;…; LðjÞΓ;k , sample xðjÞΓ;i;kþ1,compute weight ωðjÞΓ;i;kþ1 and normalization ~ωðjÞ
Γ;i;kþ1
7:
New born target existence rðjÞΓ;kþ1 and distributionpðjÞΓ;kþ1ðxÞ
8: end forOutput: πkþ1jk ¼ fðrðjÞkþ1jk ;pðjÞkþ1jkÞg
Mk
j ¼ 1[ fðrðjÞΓ;kþ1 ; p
ðjÞΓ;kþ1Þg
MΓ;kþ 1
j ¼ 1
Update:
Input: πkþ1jk ¼ frðjÞkþ1jk; pðjÞkþ1jkg
Mkþ 1jk
j ¼ 1
1:
for j¼ 1;…;Mkþ1jk do 2: Legacy particle weight: ωðjÞL;i;kþ1 and normalization
~ωðjÞL;i;kþ1, compute pseudo-likelihood ϱðjÞ
L;kþ1
3:
Legacy targets existence rðjÞL;kþ1 and distribution pðjÞL;kþ1ðxÞ 4: end for 5: for zAZkþ1 do 6: for j¼ 1;…;Mkþ1jk do 7: Measurement-updated particle weight: ωðjÞU;i;kþ1ðzÞ andnormalization ~ω ðjÞ
U;i;kþ1, pseudo-likelihood ϱðjÞU;kþ1ðzÞ
8:
Measurement-updated targets existence rU;kþ1ðzÞ anddistribution pU;kþ1ðx; zÞ9:
end for 10: end forOutput: πkþ1 ¼ fðrðjÞL;kþ1 ; pðjÞL;kþ1Þg
Mkþ 1jk
j ¼ 1[ fðrU;kþ1ðzÞ; pU;kþ1ð�jzÞÞgzAZk
3.3. Multi-sensor multi-Bernoulli filter
The multi-sensor multi-Bernoulli filter is implementedwith the three fusion schemes based on the SMC imple-mentation. Algorithms 2, 3 and 4 are the pseudo-codes ofthe multi-sensor multi-Bernoulli filter with randomupdate, sequential update and parallel update, respec-tively. In the random update, we assume that each receiverhas equal probability to be chosen, hence, the randðÞfunction generates sensor index under discrete uniformdistribution.
Algorithm 2. Multi-Bernoulli filter with random update.
Input: πk;Riði¼ 1;…;mÞ; T 1: i¼ randðmÞ; 2: multi-Bernoulli predictor to obtain πikþ1jk
3: multi-Bernoulli corrector to obtain πikþ1
Output: πkþ1 ¼ πikþ1
Algorithm 3. Multi-Bernoulli filter with sequential update.
Input: πk;Riði¼ 1;…;mÞ; T 1: for i¼ 1;…;m do 2: if i¼1 then 3: multi-Bernoulli predictor to obtain πikþ1jk
4: else 5: pseudo-predict πikþ1jk ¼ πi�1kþ1
6:
end if 7: multi-Bernoulli corrector to obtain πikþ1
8:
end for Output: πkþ1 ¼ πmkþ1
Algorithm 4. Multi-Bernoulli filter with parallel update.
Input: πk;Riði¼ 1;…;mÞ; T 1: for i¼ 1;…;m do 2: multi-Bernoulli predictor to obtain πikþ1jk

M. Liang et al. / Signal Processing 108 (2015) 102–110106
3:
multi-Bernoulli corrector to obtain πikþ14:
end for Output: πkþ1 ¼⋃mi ¼ 11m � πi
kþ1
4. Sensor-target geometry of multi-static Doppler
Analysis concerning the sensor-target geometry is pro-vided in this section. We consider the sensor-target geometryfor single target since the geometry analysis of multiplesensors with respect to multiple targets is extremely difficultand beyond the scope of this paper. Actually, taking theadvantage of the multi-Bernoulli filter, we can easily separatetargets from the multi-target posterior and it is reasonable toconsider the network configuration for each target. Observa-bility is first described in Section 4.1, where necessaryconditions of network configuration are illustrated for targetstate estimation. Then, Posterior Cramér–Rao Lower Bound(CRLB) concerning variance of unbiased state estimationduring the recursion is analyzed in Section 4.2.
4.1. Observability
Observability analysis determines how many sensorsare needed for a unique target state estimation solution.Relevant research on the observability of Doppler mea-surement [27] and optimal sensor network configurationfor localization [1,20,21] suggests that Doppler measure-ment definitely requires multiple sensors, and sensor-target geometry plays an important role in Doppler mea-surement. We consider the basic requirement of singletarget state estimation for scenario illustrated in Section2.2. Let f iði¼ 1;…;mÞ denote noiseless measurementobtained by all m receivers, and F ðxÞ ¼ ½f 1⋯f m�T , so theJacobian ∇F is given as
∇F ¼
∂f 1∂px
∂f 1∂py
∂f 1∂vx
∂f 1∂vy
⋮ ⋮ ⋮ ⋮∂f m∂px
∂f m∂py
∂f m∂vx
∂f m∂vy
2664
3775 ð16Þ
where
∂f i∂px
¼ py�s0yr30
vx py�s0y� �
�vy px�s0x� �� �
þpy�siyr3i
vx py�siy� �
�vy px�six� �� �
∂f i∂py
¼ px�s0xr30
vy px�s0x� ��vx py�s0y
� �� �
þpx�sixr3i
vy px�six� �
�vx py�siy� �� �
∂f i∂vx
¼ px�s0xr0
þpx�sixri
;∂f i∂vy
¼ py�s0yr0
þpy�siyri
r0 ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðpx�s0x Þ2þðpy�s0yÞ2
q; ri ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðpx�sixÞ2þðpy�siyÞ2
qThe necessary condition for state estimation is that the
rank of (16) should be 4. And it is easy to check that ∇F isnot singular for generic sensor network configurationwhen mZ4. Let αðiÞ and θ denote the angular position oftarget towards the ith receiver and the transmitter
respectively, that is,
sin θ¼ px�s0xr0
; cos θ¼ py�s0yr0
;
sin αðiÞ ¼ px�sixri
; cos αðiÞ ¼ py�siyri
:
Then, at least 4 receivers with distinguished αðiÞ arerequired to ensure the rank of ∇F being 4, which isconsistent with Propositions 1 and 2 in [21]. The proof isstraightforward, thus omitted.
4.2. Posterior Cramér–Rao lower bound
Denote the target state x in the form of xT ¼ ½pTvT �, then, ifposition p is known then the efficient estimator of velocity vholding CRLB exists and only 2 receivers can hold CRLB forvelocity estimation. Whereas, position p cannot hold CRLB ifvelocity v is known [1]. Therefore, we consider recursive stateestimation with unbiased initialization. Posterior Cramér–RaoLower Bound (PCRLB) shows the estimation variance duringrecursion. Assume that the target state is unbiased initializedwith variance P0, and the dynamic motion model of target isdescribed by xk ¼ Fkxk�1þwk, then the PCRLB of multiplesensors is given as
Jkþ1 ¼ ðQkþFkJ�1k FTk Þ�1þ ∑
m
i ¼ 1
HTi Hi
σ2i
ð17Þ
where Qk is the covariance of process noise wk and Hi ¼½∂f i=∂px ∂f i=∂vx ∂f i=∂py ∂f i=∂vy�. Then, we can treat JðxÞ asJðv;pÞ. Note that the unbiased estimation of whole target statex still requires at least 4 pieces of measurements from theaforementioned observability analysis. The analysis here isonly effective in recursive estimation under the assumptionthat target position is well initialized. If all σ2
i are identical, weobtain
I v;pð Þ ¼ ∑m
i ¼ 1
HTi Hi
σ2i
ð18Þ
and let ξi≔ cos 2ððαðiÞ �θÞ=2Þ then the determinant valuerepresenting the volume of estimation error is given by
det I v;pð Þð Þ ¼ 14σ4 ∑
m
i ¼ 1ξi
!2
� ∑m
i ¼ 1ξi cos ðαðiÞ þθÞ
!20@
� ∑m
i ¼ 1ξi sin ðαðiÞ þθÞ
!21A ð19Þ
As the variance of unbiased estimate is getting smaller, thelarger the value of determinant we get. Therefore, the optimalsensor network configuration can be achieved by maximizingthe determinant value; however, this is out of scope of thispaper. We just show that with the fixed network configurationonly some regions can achieve good tracking performance, asillustrated in Fig. 3 (transmitter is the origin and two receiversrespectively locate at [�10 km,0] and [10 km,0]).
In summary, the multi-static Doppler sensor networkwith unbiased target state initialization requires followingconditions as follows:
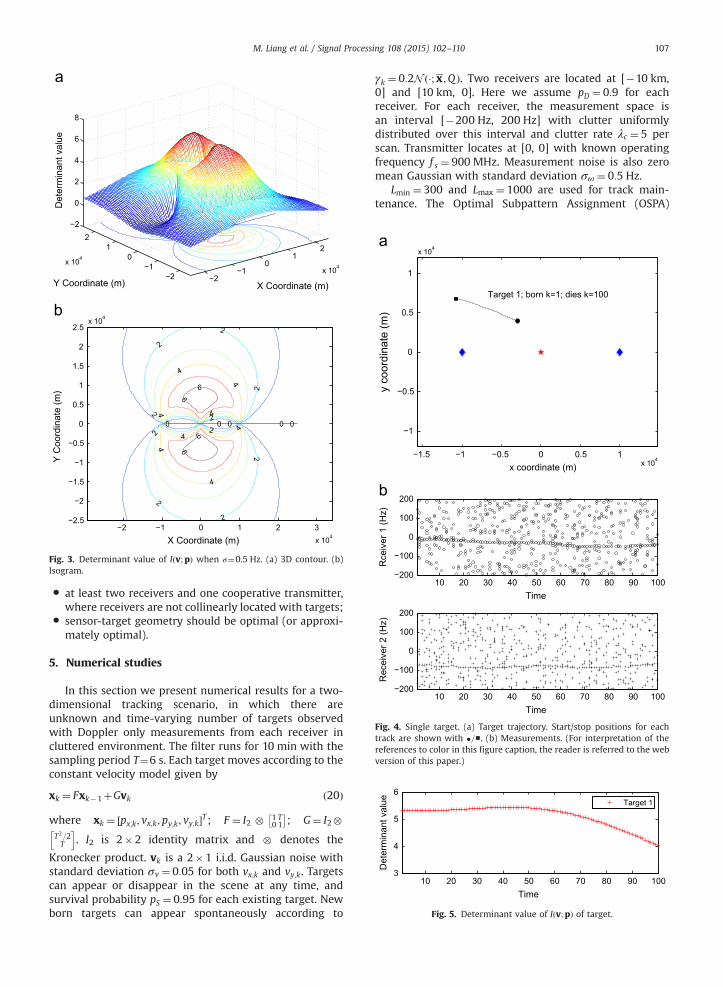
Fig. 3. Determinant value of Iðv;pÞ when σ¼0.5 Hz. (a) 3D contour. (b)Isogram.
M. Liang et al. / Signal Processing 108 (2015) 102–110 107
�
at least two receivers and one cooperative transmitter,where receivers are not collinearly located with targets;�
Fig. 4. Single target. (a) Target trajectory. Start/stop positions for eachtrack are shown with �=■. (b) Measurements. (For interpretation of thereferences to color in this figure caption, the reader is referred to the webversion of this paper.)
10 20 30 40 50 60 70 80 90 1003
4
5
6
Time
Det
erm
inan
t val
ue Target 1
Fig. 5. Determinant value of Iðv;pÞ of target.
sensor-target geometry should be optimal (or approxi-mately optimal).
5. Numerical studies
In this section we present numerical results for a two-dimensional tracking scenario, in which there areunknown and time-varying number of targets observedwith Doppler only measurements from each receiver incluttered environment. The filter runs for 10 min with thesampling period T¼6 s. Each target moves according to theconstant velocity model given by
xk ¼ Fxk�1þGvk ð20Þ
where xk ¼ ½px;k; vx;k; py;k; vy;k�T ; F ¼ I2 � 10T1
�; G¼ I2�
T2=2T
h i. I2 is 2�2 identity matrix and � denotes the
Kronecker product. vk is a 2�1 i.i.d. Gaussian noise withstandard deviation σv ¼ 0:05 for both vx;k and vy;k. Targetscan appear or disappear in the scene at any time, andsurvival probability pS ¼ 0:95 for each existing target. Newborn targets can appear spontaneously according to
γk ¼ 0:2N ð�; x ;Q Þ. Two receivers are located at [�10 km,0] and [10 km, 0]. Here we assume pD ¼ 0:9 for eachreceiver. For each receiver, the measurement space isan interval [�200 Hz, 200 Hz] with clutter uniformlydistributed over this interval and clutter rate λc ¼ 5 perscan. Transmitter locates at [0, 0] with known operatingfrequency f s ¼ 900 MHz. Measurement noise is also zeromean Gaussian with standard deviation σω ¼ 0:5 Hz.
Lmin ¼ 300 and Lmax ¼ 1000 are used for track main-tenance. The Optimal Subpattern Assignment (OSPA)
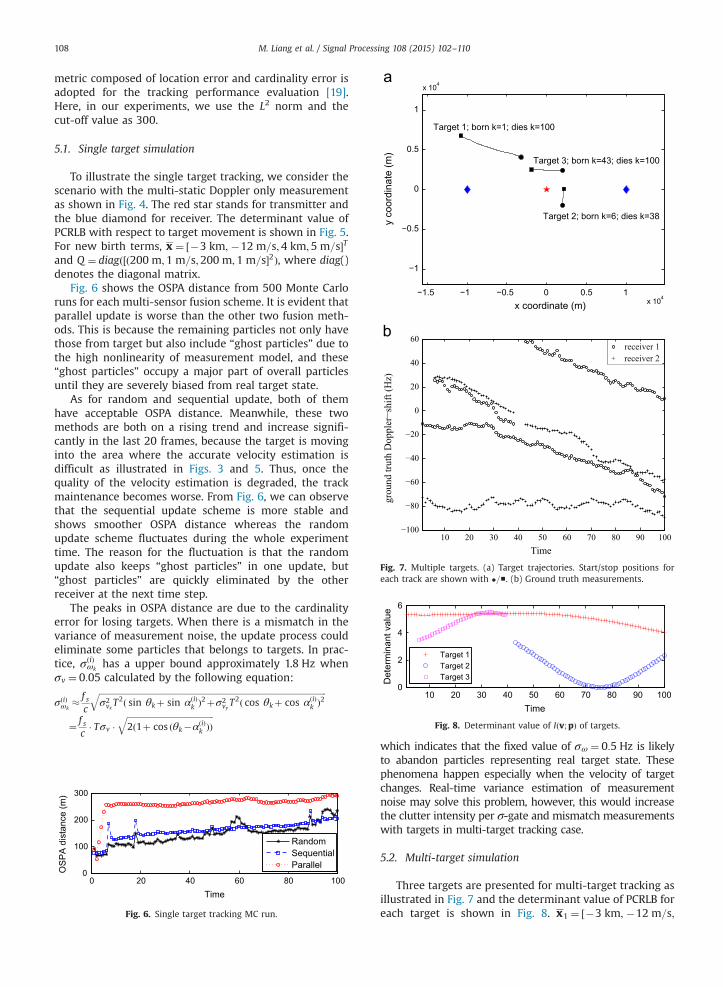
Fig. 7. Multiple targets. (a) Target trajectories. Start/stop positions foreach track are shown with �=■. (b) Ground truth measurements.
Fig. 8. Determinant value of Iðv;pÞ of targets.
M. Liang et al. / Signal Processing 108 (2015) 102–110108
metric composed of location error and cardinality error isadopted for the tracking performance evaluation [19].Here, in our experiments, we use the L2 norm and thecut-off value as 300.
5.1. Single target simulation
To illustrate the single target tracking, we consider thescenario with the multi-static Doppler only measurementas shown in Fig. 4. The red star stands for transmitter andthe blue diamond for receiver. The determinant value ofPCRLB with respect to target movement is shown in Fig. 5.For new birth terms, x ¼ ½�3 km; �12 m=s;4 km;5 m=s�Tand Q ¼ diagð½ð200 m;1 m=s;200 m;1 m=s�2Þ, where diag()denotes the diagonal matrix.
Fig. 6 shows the OSPA distance from 500 Monte Carloruns for each multi-sensor fusion scheme. It is evident thatparallel update is worse than the other two fusion meth-ods. This is because the remaining particles not only havethose from target but also include “ghost particles” due tothe high nonlinearity of measurement model, and these“ghost particles” occupy a major part of overall particlesuntil they are severely biased from real target state.
As for random and sequential update, both of themhave acceptable OSPA distance. Meanwhile, these twomethods are both on a rising trend and increase signifi-cantly in the last 20 frames, because the target is movinginto the area where the accurate velocity estimation isdifficult as illustrated in Figs. 3 and 5. Thus, once thequality of the velocity estimation is degraded, the trackmaintenance becomes worse. From Fig. 6, we can observethat the sequential update scheme is more stable andshows smoother OSPA distance whereas the randomupdate scheme fluctuates during the whole experimenttime. The reason for the fluctuation is that the randomupdate also keeps “ghost particles” in one update, but“ghost particles” are quickly eliminated by the otherreceiver at the next time step.
The peaks in OSPA distance are due to the cardinalityerror for losing targets. When there is a mismatch in thevariance of measurement noise, the update process couldeliminate some particles that belongs to targets. In prac-tice, σðiÞ
ωkhas a upper bound approximately 1.8 Hz when
σv ¼ 0:05 calculated by the following equation:
σðiÞωk
� f sc
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiσ2vxT
2ð sin θkþ sin αðiÞk Þ2þσ2
vyT2ð cos θkþ cos αðiÞ
k Þ2q
¼ f sc� Tσv �
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2ð1þ cos ðθk�αðiÞ
k ÞÞq
0 20 40 60 80 1000
100
200
300
OS
PA
dis
tanc
e (m
)
Time
RandomSequentialParallel
Fig. 6. Single target tracking MC run.
which indicates that the fixed value of σω ¼ 0:5 Hz is likelyto abandon particles representing real target state. Thesephenomena happen especially when the velocity of targetchanges. Real-time variance estimation of measurementnoise may solve this problem, however, this would increasethe clutter intensity per σ-gate and mismatch measurementswith targets in multi-target tracking case.
5.2. Multi-target simulation
Three targets are presented for multi-target tracking asillustrated in Fig. 7 and the determinant value of PCRLB foreach target is shown in Fig. 8. x1 ¼ ½�3 km; �12 m=s;
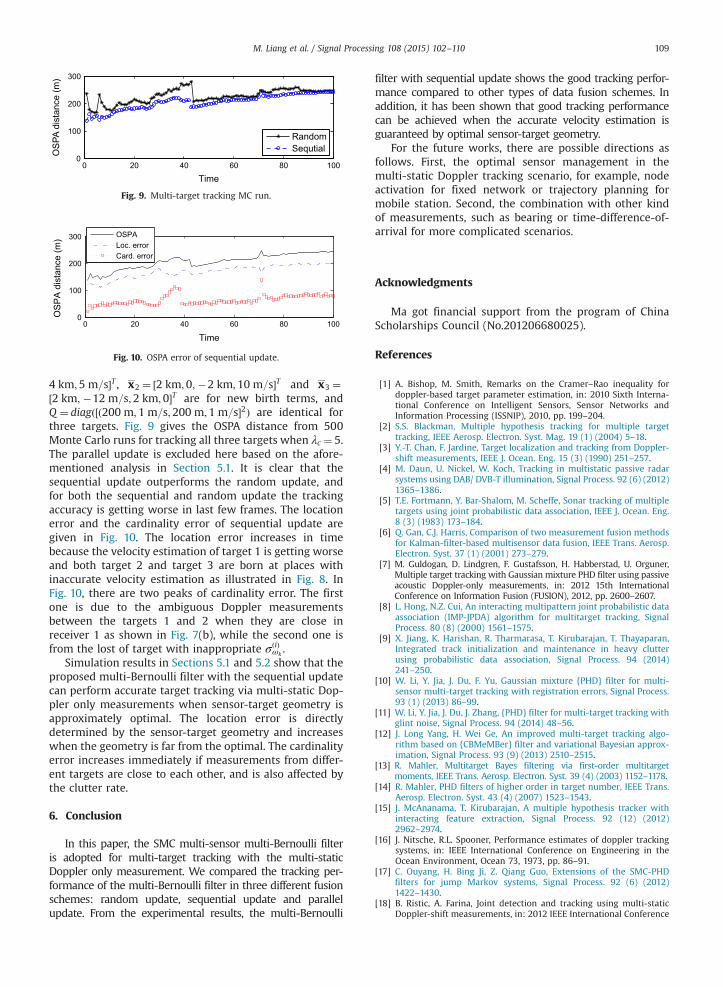
Fig. 9. Multi-target tracking MC run.
0 20 40 60 80 1000
100
200
300
OS
PA
dis
tanc
e (m
)
Time
OSPALoc. errorCard. error
Fig. 10. OSPA error of sequential update.
M. Liang et al. / Signal Processing 108 (2015) 102–110 109
4 km;5 m=s�T , x2 ¼ ½2 km;0; �2 km;10 m=s�T and x3 ¼½2 km; �12 m=s;2 km;0�T are for new birth terms, andQ ¼ diagð½ð200 m;1 m=s;200 m;1 m=s�2Þ are identical forthree targets. Fig. 9 gives the OSPA distance from 500Monte Carlo runs for tracking all three targets when λc ¼ 5.The parallel update is excluded here based on the afore-mentioned analysis in Section 5.1. It is clear that thesequential update outperforms the random update, andfor both the sequential and random update the trackingaccuracy is getting worse in last few frames. The locationerror and the cardinality error of sequential update aregiven in Fig. 10. The location error increases in timebecause the velocity estimation of target 1 is getting worseand both target 2 and target 3 are born at places withinaccurate velocity estimation as illustrated in Fig. 8. InFig. 10, there are two peaks of cardinality error. The firstone is due to the ambiguous Doppler measurementsbetween the targets 1 and 2 when they are close inreceiver 1 as shown in Fig. 7(b), while the second one isfrom the lost of target with inappropriate σðiÞ
ωk.
Simulation results in Sections 5.1 and 5.2 show that theproposed multi-Bernoulli filter with the sequential updatecan perform accurate target tracking via multi-static Dop-pler only measurements when sensor-target geometry isapproximately optimal. The location error is directlydetermined by the sensor-target geometry and increaseswhen the geometry is far from the optimal. The cardinalityerror increases immediately if measurements from differ-ent targets are close to each other, and is also affected bythe clutter rate.
6. Conclusion
In this paper, the SMC multi-sensor multi-Bernoulli filteris adopted for multi-target tracking with the multi-staticDoppler only measurement. We compared the tracking per-formance of the multi-Bernoulli filter in three different fusionschemes: random update, sequential update and parallelupdate. From the experimental results, the multi-Bernoulli
filter with sequential update shows the good tracking perfor-mance compared to other types of data fusion schemes. Inaddition, it has been shown that good tracking performancecan be achieved when the accurate velocity estimation isguaranteed by optimal sensor-target geometry.
For the future works, there are possible directions asfollows. First, the optimal sensor management in themulti-static Doppler tracking scenario, for example, nodeactivation for fixed network or trajectory planning formobile station. Second, the combination with other kindof measurements, such as bearing or time-difference-of-arrival for more complicated scenarios.
Acknowledgments
Ma got financial support from the program of ChinaScholarships Council (No.201206680025).
References
[1] A. Bishop, M. Smith, Remarks on the Cramer–Rao inequality fordoppler-based target parameter estimation, in: 2010 Sixth Interna-tional Conference on Intelligent Sensors, Sensor Networks andInformation Processing (ISSNIP), 2010, pp. 199–204.
[2] S.S. Blackman, Multiple hypothesis tracking for multiple targettracking, IEEE Aerosp. Electron. Syst. Mag. 19 (1) (2004) 5–18.
[3] Y.-T. Chan, F. Jardine, Target localization and tracking from Doppler-shift measurements, IEEE J. Ocean. Eng. 15 (3) (1990) 251–257.
[4] M. Daun, U. Nickel, W. Koch, Tracking in multistatic passive radarsystems using DAB/ DVB-T illumination, Signal Process. 92 (6) (2012)1365–1386.
[5] T.E. Fortmann, Y. Bar-Shalom, M. Scheffe, Sonar tracking of multipletargets using joint probabilistic data association, IEEE J. Ocean. Eng.8 (3) (1983) 173–184.
[6] Q. Gan, C.J. Harris, Comparison of two measurement fusion methodsfor Kalman-filter-based multisensor data fusion, IEEE Trans. Aerosp.Electron. Syst. 37 (1) (2001) 273–279.
[7] M. Guldogan, D. Lindgren, F. Gustafsson, H. Habberstad, U. Orguner,Multiple target tracking with Gaussian mixture PHD filter using passiveacoustic Doppler-only measurements, in: 2012 15th InternationalConference on Information Fusion (FUSION), 2012, pp. 2600–2607.
[8] L. Hong, N.Z. Cui, An interacting multipattern joint probabilistic dataassociation (IMP-JPDA) algorithm for multitarget tracking, SignalProcess. 80 (8) (2000) 1561–1575.
[9] X. Jiang, K. Harishan, R. Tharmarasa, T. Kirubarajan, T. Thayaparan,Integrated track initialization and maintenance in heavy clutterusing probabilistic data association, Signal Process. 94 (2014)241–250.
[10] W. Li, Y. Jia, J. Du, F. Yu, Gaussian mixture {PHD} filter for multi-sensor multi-target tracking with registration errors, Signal Process.93 (1) (2013) 86–99.
[11] W. Li, Y. Jia, J. Du, J. Zhang, {PHD} filter for multi-target tracking withglint noise, Signal Process. 94 (2014) 48–56.
[12] J. Long Yang, H. Wei Ge, An improved multi-target tracking algo-rithm based on {CBMeMBer} filter and variational Bayesian approx-imation, Signal Process. 93 (9) (2013) 2510–2515.
[13] R. Mahler, Multitarget Bayes filtering via first-order multitargetmoments, IEEE Trans. Aerosp. Electron. Syst. 39 (4) (2003) 1152–1178.
[14] R. Mahler, PHD filters of higher order in target number, IEEE Trans.Aerosp. Electron. Syst. 43 (4) (2007) 1523–1543.
[15] J. McAnanama, T. Kirubarajan, A multiple hypothesis tracker withinteracting feature extraction, Signal Process. 92 (12) (2012)2962–2974.
[16] J. Nitsche, R.L. Spooner, Performance estimates of doppler trackingsystems, in: IEEE International Conference on Engineering in theOcean Environment, Ocean 73, 1973, pp. 86–91.
[17] C. Ouyang, H. Bing Ji, Z. Qiang Guo, Extensions of the SMC-PHDfilters for jump Markov systems, Signal Process. 92 (6) (2012)1422–1430.
[18] B. Ristic, A. Farina, Joint detection and tracking using multi-staticDoppler-shift measurements, in: 2012 IEEE International Conference

M. Liang et al. / Signal Processing 108 (2015) 102–110110
on Acoustics, Speech and Signal Processing (ICASSP), 2012,pp. 3881–3884.
[19] D. Schuhmacher, B.-T. Vo, B.-N. Vo, A consistent metric for perfor-mance evaluation of multi-object filters, IEEE Trans. Signal Process.56 (8) (2008) 3447–3457.
[20] I. Shames, A. Bishop, M. Smith, B. Anderson, Doppler shift targetlocalization, IEEE Trans. Aerosp. Electron. Syst. 49 (1) (2013) 266–276.
[21] I. Shames, A. Bishop, M. Smith, B.D.O. Anderson, Analysis of targetvelocity and position estimation via Doppler-shift measurements,in: Australian Control Conference (AUCC), 2011, pp. 507–512.
[22] M. Tobias, A. Lanterman, A probability hypothesis density-basedmultitarget tracker using multiple bistatic range and velocitymeasurements, in: Proceedings of the 36th Southeastern Sympo-sium on System Theory, 2004, pp. 205–209.
[23] B.-N. Vo, W.-K. Ma, The gaussian mixture probability hypothesisdensity filter, IEEE Trans. Signal Process. 54 (11) (2006) 4091–4104.
[24] B.-N. Vo, B.-T. Vo, N.-T. Pham, D. Suter, Joint detection and estima-tion of multiple objects from image observations, IEEE Trans. SignalProcess. 58 (10) (2010) 5129–5141.
[25] B.-T. Vo, B.-N. Vo, A. Cantoni, The cardinality balanced multi-targetmulti-Bernoulli filter and its implementations, IEEE Trans. SignalProcess. 57 (2) (2009) 409–423.
[26] R. Webster, An exact trajectory solution from Doppler shift mea-surements, IEEE Trans. Aerosp. Electron. Syst. 18 (2) (1982) 249–252.
[27] Y.-C. Xiao, P. Wei, T. Yuan, Observability and performance analysis ofbi/multi-static Doppler-only radar, IEEE Trans. Aerosp. Electron. Syst.46 (4) (2010) 1654–1667.
[28] J.H. Yoon, D.Y. Kim, S. Hwan Bae, V. Shin, Joint initialization andtracking of multiple moving objects using Doppler information, IEEETrans. Signal Process. 59 (July (7)) (2011) 3447–3452.