Žmogaus biomechaninių tyrimų laboratorijos …Žmogaus biomechaninių tyrimų laboratorijos...
TRANSCRIPT

Žmogaus biomechaninių tyrimų laboratorijos projektavimas
Jevgenij Rogožin
Donatas Lukšys
Egzistuoja keli biomechanikos laboratorijų tipai, skirti skirtingų sričių tyrimams atlikti. Organizmo reakcijų į aplinką tyrimų laboratorijoje vienas pagrindinių tyrimų yra hiper- arba hipogravitacijos įtaka žmogaus organizmui. Tokiems tyrimams atlikti taikoma daug skirtingų sistemų.
Skrendant keleiviniu lėktuvu, keleiviai patiria 1,5 G-jėgos apkrovą, kosmonautai, kylantys į kosmosą – 3-4 G-jėgos, o tam tikrų karinių naikintuvų pilotai gali patirti net iki 12 G-jėgos ilgalaikes apkrovas. Nepasiruošusiam žmogui, patiriant ilgalaikes apkrovas, suprastėja rega. Siekiant užtikrinti skrydžių saugumą yra būtinas pilotų fizinis pasiruošimas. Vienas iš pagrindinių treniravimosi metodų – žmogaus centrifugavimo sistemos, imituojančios aplinkybes, artimas realiajam skrydžiui.
Reabilitacinis virtualios realybės treniruoklis
Austėja Mockutė
Vadovas: Gediminas Gaidulis
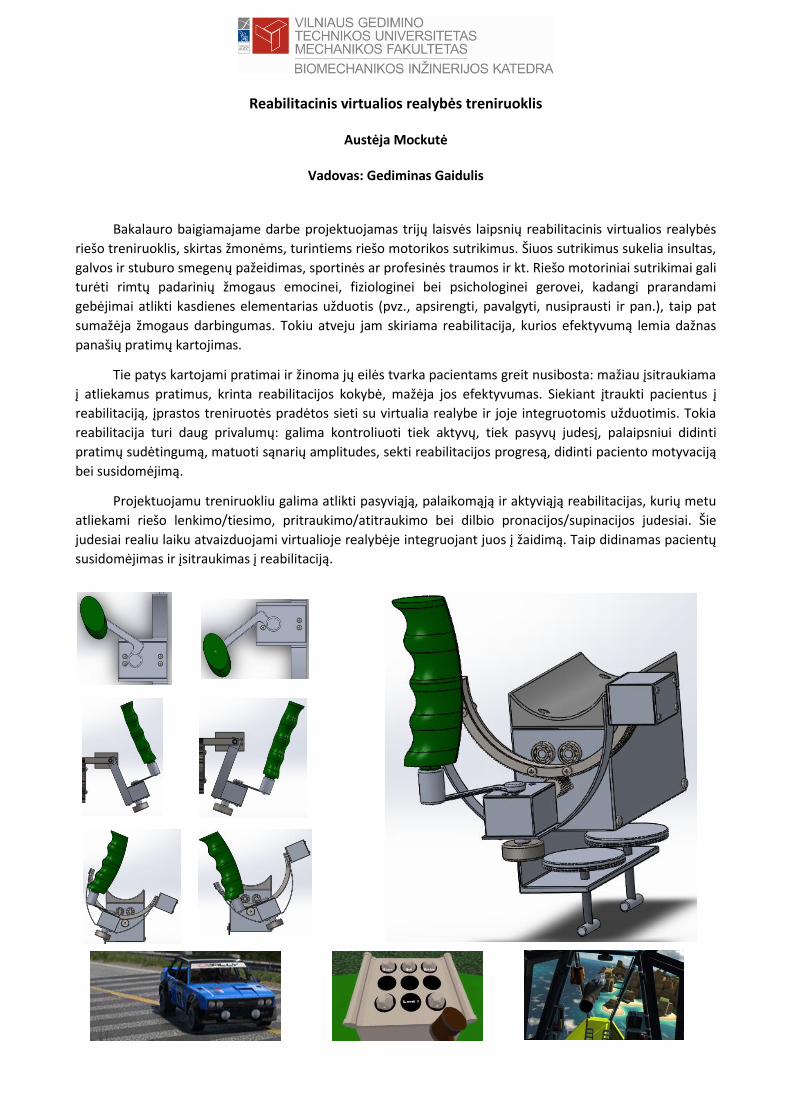
Bakalauro baigiamajame darbe projektuojamas trijų laisvės laipsnių reabilitacinis virtualios realybės
riešo treniruoklis, skirtas žmonėms, turintiems riešo motorikos sutrikimus. Šiuos sutrikimus sukelia insultas,
galvos ir stuburo smegenų pažeidimas, sportinės ar profesinės traumos ir kt. Riešo motoriniai sutrikimai gali
turėti rimtų padarinių žmogaus emocinei, fiziologinei bei psichologinei gerovei, kadangi prarandami
gebėjimai atlikti kasdienes elementarias užduotis (pvz., apsirengti, pavalgyti, nusiprausti ir pan.), taip pat
sumažėja žmogaus darbingumas. Tokiu atveju jam skiriama reabilitacija, kurios efektyvumą lemia dažnas
panašių pratimų kartojimas.
Tie patys kartojami pratimai ir žinoma jų eilės tvarka pacientams greit nusibosta: mažiau įsitraukiama
į atliekamus pratimus, krinta reabilitacijos kokybė, mažėja jos efektyvumas. Siekiant įtraukti pacientus į
reabilitaciją, įprastos treniruotės pradėtos sieti su virtualia realybe ir joje integruotomis užduotimis. Tokia
reabilitacija turi daug privalumų: galima kontroliuoti tiek aktyvų, tiek pasyvų judesį, palaipsniui didinti
pratimų sudėtingumą, matuoti sąnarių amplitudes, sekti reabilitacijos progresą, didinti paciento motyvaciją
bei susidomėjimą.
Projektuojamu treniruokliu galima atlikti pasyviąją, palaikomąją ir aktyviąją reabilitacijas, kurių metu
atliekami riešo lenkimo/tiesimo, pritraukimo/atitraukimo bei dilbio pronacijos/supinacijos judesiai. Šie
judesiai realiu laiku atvaizduojami virtualioje realybėje integruojant juos į žaidimą. Taip didinamas pacientų
susidomėjimas ir įsitraukimas į reabilitaciją.

Riedžio neįgaliesiems projektavimas
Brigita Simniškytė
Vadovas: Gediminas Gaidulis
Laisvalaikio transporto priemonės žmonių gyvenime tampa vis populiaresnės ir dažniau
naudojamos. Sveiki žmonės turi platų laisvalaikio priemonių pasirinkimą: nuo paprastų mechaninių
dviračių iki elektra varomų paspirtukų ar vienračių. Neįgaliesiems laisvalaikio priemones pritaikyti
sunkiau arba visai neįmanoma, todėl jie savo vežimėlius, vaikštynes ar kitas techninės pagalbos
priemones gali pakeisti vos keletu alternatyvų.
Negalią turinčių žmonių laisvalaikis yra labai svarbus dalykas jų socialinei integracijai, savijautai ir
gyvenimo kokybei gerinti. Aktyviems neįgaliesiems svarbu kiek įmanoma padidinti mobilumą ir skatinti
aktyvų gyvenimo būdą, todėl reikalingos kitokios, nei įprastai naudojamos, transporto priemonės.
Šiame baigiamajame darbe projektuojama naujoviška neįgaliųjų laisvalaikio transporto priemonė –
riedis.
Riedžiai, kuriuos naudoja neįgalieji, gali būti su sėdėjimo atrama (sėdimieji) arba be sėdėjimo
atramos (stovimieji). Riedžio tipas pasirenkamas pagal galimą vartotojo poziciją naudojantis priemone,
kuri dažniausiai priklauso nuo negalios pobūdžio ir sunkumo. Kadangi iš visų negalią turinčių žmonių
daugiausia neįgaliųjų yra su sutrikusiomis judėjimo funkcijomis, projektuojamas riedis neįgaliesiems su
sėdėjimo atrama. Riedis taip pat turi stovėjimo stabdžius, kad neįgalusis saugiai galėtų persikelti į riedį
arba iš jo, o jo vairalazdė yra standžiai įtvirtinta, taip sumažinant šoninio virtimo tikimybę naudojantis
riedžiu.

Daugiafunkcinio gipsavimo rėmo projektavimas
Gabrielė Taparauskaitė
Vadovas: Gediminas Gaidulis
Protezavimo ar ortezavimo metu pacientas patiria daug nemalonių emocijų (stebimas kūnas su
defektais, nemalonūs pojūčiai, psichologinis jaudulys). Technikas taip pat gali patirti nemalonių emocijų dėl
netaisyklingos paciento kūno padėties procedūros metu, nepatogaus priėjimo prie paciento gipsuojamos
galūnės ir sudėtingo darbo, kuris vargina.
Siekiant, kad tiek pacientui, tiek technikui gipsavimo procedūra būtų kuo įmanoma mažiau
bauginanti, baigiamajame darbe suprojektuotas daugiafunkcinis gipsavimo rėmas, kurį naudojant paciento
galūnės ar visas kūnas paprasčiau įtvirtinami rėme, įtvirtinimas kelia mažiau diskomforto, o specialistas,
reguliuodamas rėmo dalių aukštį, gali pasiruošti erdvę tokiam darbui, koks jam yra patogiausias.

Griebimo funkciją atkuriančio įtvaro projektavimas
Marta Trinkūnaitė
Vadovas: Gediminas Gaidulis
Griebimo funkcija – tai žmogaus fizine savybe sugriebti objektus, reikalingus kasdieneje veikloje ir
gyvenime. Ji palengvina buitį, leidžia lengviau atlikti kasdienius veiksmus ir judesius. Žmogus griebimo
funkciją pradeda naudoti vos gimęs, tačiau pradžioje tai būna nekoordinuoti judesiai, kurie laikui begant
vystosi ir tampa vis tikslesni ir labiau kontroliuojami. Griebimo judesį atlieka 22 sąnariai ir 35-38 raumenys.
Esant plaštakos raumenų nuovargiui ar susilpnejimui, griebimo funkcija gali sutrikti. Tokiu atveju žmogaus
judesiai atliekami neefektyviai, todel būtina ją atkurti. Jeigu raumenų veikla nera prarasta, griebimą galima
atstatyti treniruojant raumenis. Kitu atveju – pritaikant griebimo funkciją atkuriančius įtvarus ar sistemas.
Šios priemones yra ypatingai svarbios, nes padedamos atkurti judamojo aparato veiklą mažina socialinę
atskirtį bei palengvina žmogaus kasdienybę, pagerina gyvenimo kokybę, leidžia žmogui atlikti veiksmus
savarankiškai. Atsižvelgiant į griebimo funkcijos atkūrimo svarbą, šiame baigiamajame bakalauro darbe yra
suprojektuotas griebimo funkciją atkuriantis įtvaras.

Biomechatroninio protezo, esant apatinės galūnės amputacijai žemiau kelio, projektavimas
Justas Tamošiūnas
doc. dr. Julius Griškevičius
Siekiant atstatyti judėjimo funkciją ją praradusiems žmonės dėl amputuos apatinės galūnės, yra naudojamos
įvairios dirbtinių medžiagų konstrukcijos – protezai. Prasta šių priemonių geba atkurti biologinių darinių
atliekamą darbą skatina priimti nestandartinius mechaninių sistemų įgyvendinimo sprendimus. Atitinkamos
konstrukcijos yra vadinamos biomechatroninėmis. Tai jutikliais, registruojančiais įvairius fizikinius dydžius
(žmogaus kūno biosignalai, slėgis ar kt.), valdomos sistemos, orientuotos vykdyti iš anksto numatytą funkciją.
Baigiamajame bakalauro darbe yra projektuojamas prisitaikantis prie judėjimo tipų ir paviršių
biomechatroninis protezas, skirtas apatinės galūnės amputaciją žemiau kelio patyrusiems asmenims.
Didžiausias dėmesys skiriamas judesių sagitalinėje bei frontalinėje plokštumose sistemų įgyvendinimui.
Atsižvelgiama į tinkamų parametrų mechaninių konstrukcijų tarpusavio automatinį valdymą, pritaikomą
judėjimui lygiu paviršiumi, įkalne (laiptais į viršų), nuokalne (laiptais į apačią) bei kiekvieno judėjimo tipo metu
sistemos pritaikymą prie paviršiaus nelygumų inversijos ir eversijos judesiais.
Pagalbinio mechanizmo dviračio motorizavimui projektavimas
Virginija Kunsmonaitė
Julius Griškevičius
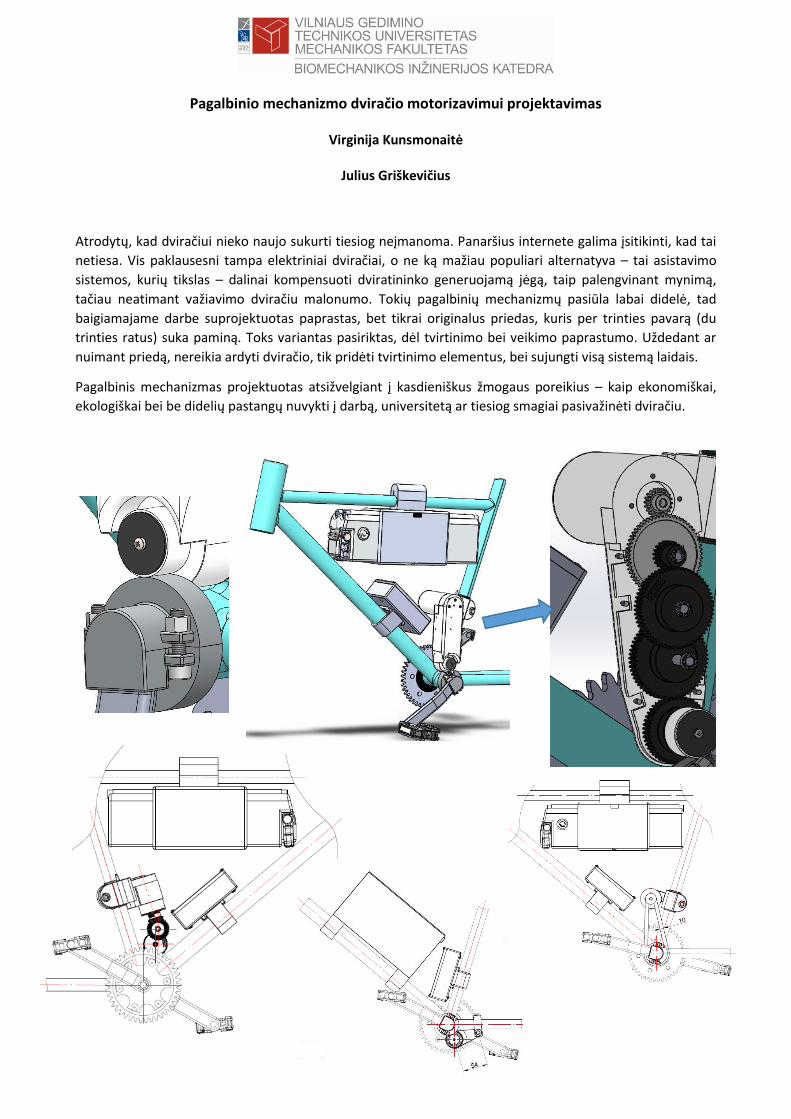
Atrodytų, kad dviračiui nieko naujo sukurti tiesiog neįmanoma. Panaršius internete galima įsitikinti, kad tai
netiesa. Vis paklausesni tampa elektriniai dviračiai, o ne ką mažiau populiari alternatyva – tai asistavimo
sistemos, kurių tikslas – dalinai kompensuoti dviratininko generuojamą jėgą, taip palengvinant mynimą,
tačiau neatimant važiavimo dviračiu malonumo. Tokių pagalbinių mechanizmų pasiūla labai didelė, tad
baigiamajame darbe suprojektuotas paprastas, bet tikrai originalus priedas, kuris per trinties pavarą (du
trinties ratus) suka paminą. Toks variantas pasiriktas, dėl tvirtinimo bei veikimo paprastumo. Uždedant ar
nuimant priedą, nereikia ardyti dviračio, tik pridėti tvirtinimo elementus, bei sujungti visą sistemą laidais.
Pagalbinis mechanizmas projektuotas atsižvelgiant į kasdieniškus žmogaus poreikius – kaip ekonomiškai,
ekologiškai bei be didelių pastangų nuvykti į darbą, universitetą ar tiesiog smagiai pasivažinėti dviračiu.

Dinaminės posturografijos sistemos su virtualia realybe projektavimas
Austė Valentinavičiūtė
Donatas Lukšys
Lietuvoje pusiausvyros sutrikimais skundžiasi 30% žmonių, vyresnių nei 50 metų. Visame pasaulyje
tokių žmonių yra daugiau nei 1 mlrd., iš jų 25% neįmanoma nustatyti ligos priežasties. Žmogaus pusiausvyrą
tiria įvairios posturografijos sistemos, tačiau, remiantis statistika, matosi, kad šios sistemos turi trūkumų,
nes nepadeda iki galo išaiškinti sutrikimų priežasčių. Norint kuo tiksliau ištirti žmogaus gebėjimą išlaikyti
pusiausvyrą, reikia naudoti dinaminės posturografijos sistemas, kurios leidžia imituoti kasdienės veiklos
judesius. Tam puikiai tinka 6 laisvės laipsnių dinaminė platforma bei virtuali realybė (ekranas ir/arba
akiniai). 6 laisvės laipsnių dinaminė platforma erdvėje gali judėti visomis įmanomomis kryptimis, todėl,
pasitelkiant virtualią realybę, galima sukelti realesnius pojūčius.

Taktilinio Brailio displėjaus projektavimas
Maksim Slivka
Andžela Šešok
Remiantis Pasaulinės sveikatos organizacija (World Health Organization), pasaulyje yra 253
milijonai žmonių su regos pažeidimais, iš jų 36 milijonai visiškai akli . Kadangi žmonės vis labiau įsileidžia
informacines technologijas į kasdienybę, taktilinis Brailio displėjus pasidarė svarbus žmonėms su regos
sutrikimais dėl galimybės patogiai naudotis informaciniais prietaisais. Taktilinis Brailio displėjus – tai
kompensacinis įrenginys, leidžiantis žmonėms su regos pažeidimais skaityti kompiuteriuose, telefonuose,
planšetėse ir pan. vaizduojamą medžiagą, išverčiant tekstą į Brailio kalbą. Tačiau tokie prietaisai yra labai
brangūs, jų kaina siekia kelis tūkstančius JAV dolerių už vienetą.
Šio darbo tikslas – suprojektuoti nebrangų, ekonomišką ir patogų taktilinį Brailio displėjų. Tokio
taktilinio Brailio displėjaus veikimas pagrįstas magnetizmu, gravitacija ir spyruoklių kietumu.
Mikrokontroleris reguliuoja viso prietaiso veikimą. Į 8 taškų taktilinį Brailio elementą siunčiamas signalas,
kuris reguliuoja taškų konfigūraciją. Taškų pozicija nustato solenoidų veikimas. Kai solenoidas pasikelia –
taško kaiščio magnetas prisijungia prie solenoido ir jis nusileidžia, o kai solenoidas nusileidžia – magnetų
pora išsiskiria ir spyruoklės pakelia tašką.
ECMO (Ekstrakorporalinė membraninė oksigenacija) pompos projektavimas
Laura Kasiulytė
Zyta Kuzborska
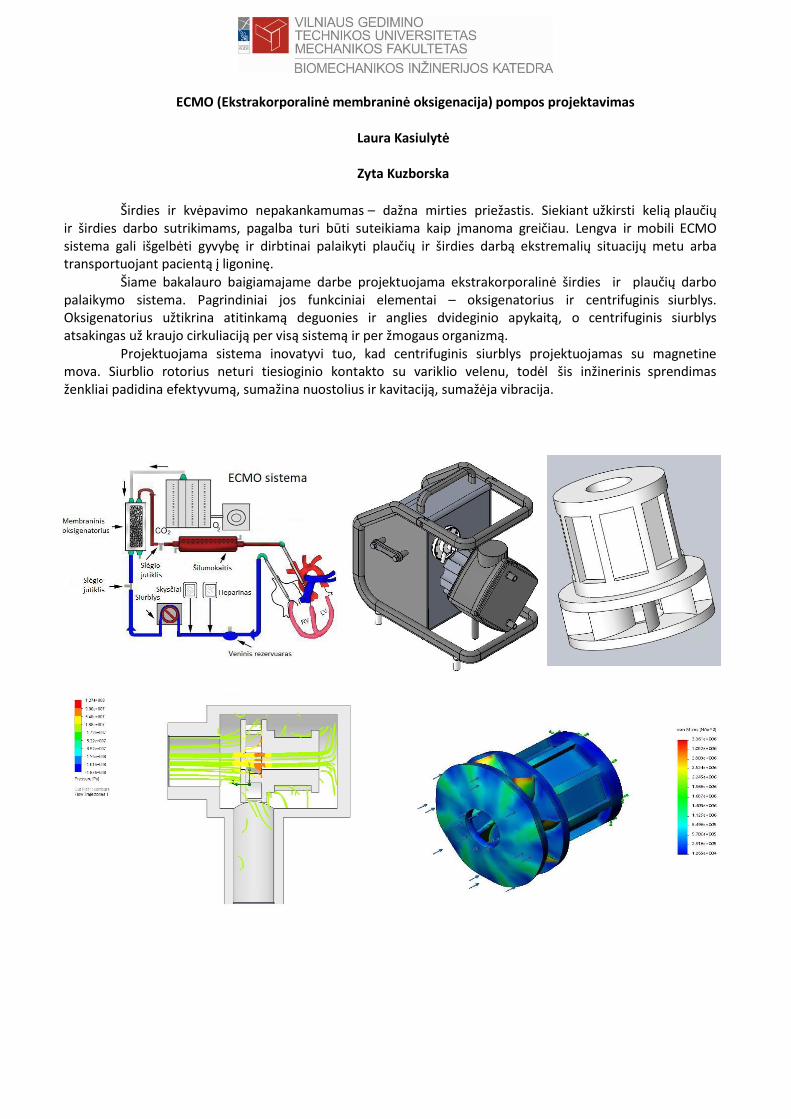
Širdies ir kvėpavimo nepakankamumas – dažna mirties priežastis. Siekiant užkirsti kelią plaučių ir širdies darbo sutrikimams, pagalba turi būti suteikiama kaip įmanoma greičiau. Lengva ir mobili ECMO sistema gali išgelbėti gyvybę ir dirbtinai palaikyti plaučių ir širdies darbą ekstremalių situacijų metu arba transportuojant pacientą į ligoninę.
Šiame bakalauro baigiamajame darbe projektuojama ekstrakorporalinė širdies ir plaučių darbo palaikymo sistema. Pagrindiniai jos funkciniai elementai – oksigenatorius ir centrifuginis siurblys. Oksigenatorius užtikrina atitinkamą deguonies ir anglies dvideginio apykaitą, o centrifuginis siurblys atsakingas už kraujo cirkuliaciją per visą sistemą ir per žmogaus organizmą.
Projektuojama sistema inovatyvi tuo, kad centrifuginis siurblys projektuojamas su magnetine mova. Siurblio rotorius neturi tiesioginio kontakto su variklio velenu, todėl šis inžinerinis sprendimas ženkliai padidina efektyvumą, sumažina nuostolius ir kavitaciją, sumažėja vibracija.

Apatinio žandikaulio osteosintezės implantų projektavimas ir gamybos technologija
Rokas Dvarvytis
Andžela Šešok
Kelių eismo įvykiuose žandikaulio lūžiai yra viena iš dažniausiai pasitaikančių traumų. Šiuo metu yra tik viena įmonė, kurios užsiima individualių žandikaulio implantų gamyba Lietuvoje. Dažniausiai implantai gaminami nepakankamo tikslumo arba turi didelę savikainą – tai yra savybės, kurios turi neigiamą įtaką vartotojų rinkoje.
Šio baigiamojo darbo užsibrėžtas tikslas – suprojektuoti apatinio žandikaulio implantą, kuris sujungtų atskiras žandikaulio dalis bei atstatytų pradinę žandikaulio anatomiją. Žandikaulio implantas išsiskiria tuo, kad prie jo gali tvirtintis odontologininis implantas. Tokiu būdu yra atstatomi ir traumos metu prarasti dantys. Rimtesnės traumos metu yra pašalinamas dalis žandikaulio. Susidariusiai ertmei užpildyti yra pagaminama detalė iš kalcio hidroksiapatito – jis turi panašias mechanines savybes, kaip ir kaulinis audinys. Implantui tvirtinti yra naudojami titaniniai varžtai. Tiek implantas, tiek varžtai turi būti biosuderinami su žmogaus organizmu. Implantui prilaikyti operacijos metu prie apatinio žandikaulio suprojektuotas operacinis gidas. Aukštai detalių kokybei užtikrinti pasirinkta detales gaminti taikant 3D spausdinimo technologiją.

Perkutaninio ašinės tėkmės širdies siurblio projektavimas
Akvilė Goberytė
Andžela Šešok
Viena aktualiausių kraujotakos sistemos problemų yra širdies nepakankamumas. Tai būklė, kurios metu širdis neefektyviai stumdo kraują organizme. Dažnai vienintelis efektyvus šios ligos gydymas yra širdies transplantacija, tačiau donoro širdžių skaičiai nuolatos yra riboti, ko pasėkoje recipientas yra priverstas laukti. Tokiu atveju, atsiranda poreikis palaikyti paciento kraujotaką alternatyviais mechaninės kraujotakos metodais.
Baigiamajame darbe projektuojamas perkutaninis ašinės tėkmės širdies siurblys. Prietaisas yra priskiriamas mentiniams siurbliams. Jo paskirtis – sparnuotės dėka varyti kraują iš kairiojo skilvelio į kylančiąją aortą per tam specialiai suprojektuotą kaniulę, ne mažesniu kaip 2,5 l/min našumu. Siurblio darbiniai parametrai, tokie kaip, sparnuotės sukimosi greitis, slėgis siurblio viduje, bei našumas yra kontroliuojami ir sekami sistemos valdymo konsolėje, šalia paciento. Projektuojamo siurblio gabaritai privalo užtikrinti sklandų prietaiso įvedimą per femoralinę arteriją į širdį, retrogradiškai.
v

BIONINIS ŠLAUNIES PROTEZAS
Mindaugas Jonas Petrikas
Julius Griškevičius
Šiomis dienomis yra naudojama daug skirtingų šlaunies protezų, tačiau nuo impulsų jų beveik nėra, nes pagrindę būną tiesiog mechaniniai arba veikiami variklio. Tačiau šio projekto esmė yra suprojektuoti bioninį šlaunies protezą, kurio pavara veiktų nuo tam tikrų šlaunies raumenų impulsų. Kokį judesį norėtų atlikti tikroji koją, tai kad tokius pat signalus EMG jutiklis iš raumenų perduodu kontroleriui. Kontroleris sugeneravęs gautą signalą iš jutiklio, siunčia varikliui užduotį sukurti atitinkamą greitį. Variklis viską supratęs suka reikiamu greičiu diržinę pavarą ir koją judės tokiu greičiu ir kampu kokių ją norės judinti vartotojas. Šis protezas sugebės atlaikyti daugiau kaip 1500 N jėgą. O svarbiausia žmogus vėl galės vaikščioti kur tik nori.

Širdies stabilizavimo įrenginio projektavimas
Andrius Batvinskas
Andžela Šešok
Širdis žmogaus organizme yra pagrindinė kraujotakos sistemos dalis. Pagal statistiką Lietuvoje daugiausiai
žmonių miršta dėl kraujotakos sistemos ligų. Nepastovus ir greitas gyvenimo tempas, mažas dėmesys
sveikatai, įgimtos ligos yra tokių ligų, kaip širdies nepakankamumas, kardiomiopatijos, aneurizmos, miokardo
infarktas, rezultatas. Širdies ligų gydymo metodai jau išrasti seniai, tačiau mirtingumas dėl šių ligų nemažėja.
Dėl to yra siekiama nuolat tobulinti gydymo metodiką visose medicinos srityse. Širdies chirurgija yra viena iš
jų. Paprastai chirurginės širdies operacijos atliekamos taikant dirbtinę kraujotaką. Siekiant išvengti
komplikacijų, kurios pacientui pasireiškia naudojant dirbtinę kraujotaką, šiame baigiamajame darbe bus
projektuojamas širdies stabilizavimo įrenginys. Tai sistema, kurios dėka operacijos atliekamos nesustabdžius
paciento širdies darbo, o chirurgai gali nevaržomai operuoti stabilizuojamą širdies plotą, kuriame širdies
raumuo nejuda. Ši sistema sudaryta iš širdies stabilizavimo ir pozicionavimo vakuuminių įrenginių, bei
skėstuvo, skirto šonkaulių pravėrimui. Šiame darbe projektuojamas stabilizavimo įrenginys skirtas būtent
toroskopinėms minimaliai invazinėms operacijoms, todėl naudojant tokią sistemą paciento kūne atliekami
maži pjūviai, o tai gerokai sumažina gijimo procesą, lyginant su kitais širdies operacijų būdais.
APATINIŲ GALŪNIŲ EGZOSKELETO FIZINIŲ GALIMYBIŲ PADIDINIMUI PROJEKTAVIMAS
Aurimas Karlonas, BMf-14
Darbo vadovas doc. dr. Julius Griškevičius
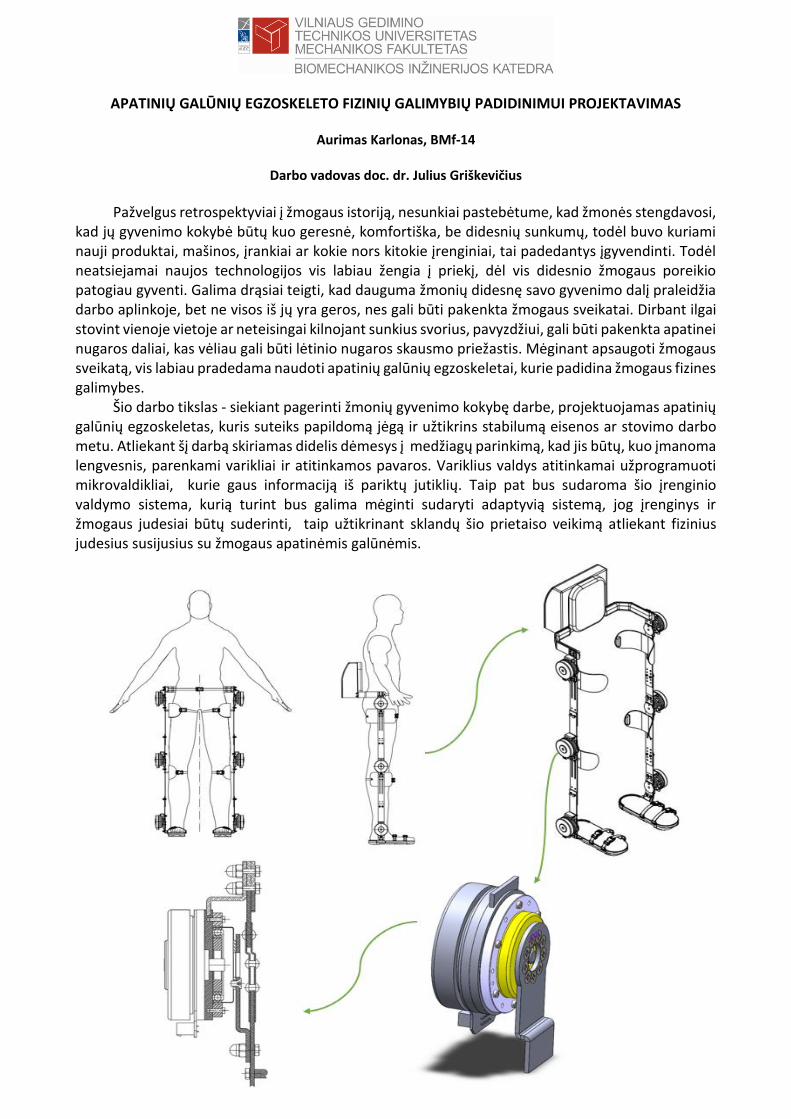
Pažvelgus retrospektyviai į žmogaus istoriją, nesunkiai pastebėtume, kad žmonės stengdavosi, kad jų gyvenimo kokybė būtų kuo geresnė, komfortiška, be didesnių sunkumų, todėl buvo kuriami nauji produktai, mašinos, įrankiai ar kokie nors kitokie įrenginiai, tai padedantys įgyvendinti. Todėl neatsiejamai naujos technologijos vis labiau žengia į priekį, dėl vis didesnio žmogaus poreikio patogiau gyventi. Galima drąsiai teigti, kad dauguma žmonių didesnę savo gyvenimo dalį praleidžia darbo aplinkoje, bet ne visos iš jų yra geros, nes gali būti pakenkta žmogaus sveikatai. Dirbant ilgai stovint vienoje vietoje ar neteisingai kilnojant sunkius svorius, pavyzdžiui, gali būti pakenkta apatinei nugaros daliai, kas vėliau gali būti lėtinio nugaros skausmo priežastis. Mėginant apsaugoti žmogaus sveikatą, vis labiau pradedama naudoti apatinių galūnių egzoskeletai, kurie padidina žmogaus fizines galimybes.
Šio darbo tikslas - siekiant pagerinti žmonių gyvenimo kokybę darbe, projektuojamas apatinių galūnių egzoskeletas, kuris suteiks papildomą jėgą ir užtikrins stabilumą eisenos ar stovimo darbo metu. Atliekant šį darbą skiriamas didelis dėmesys į medžiagų parinkimą, kad jis būtų, kuo įmanoma lengvesnis, parenkami varikliai ir atitinkamos pavaros. Variklius valdys atitinkamai užprogramuoti mikrovaldikliai, kurie gaus informaciją iš pariktų jutiklių. Taip pat bus sudaroma šio įrenginio valdymo sistema, kurią turint bus galima mėginti sudaryti adaptyvią sistemą, jog įrenginys ir žmogaus judesiai būtų suderinti, taip užtikrinant sklandų šio prietaiso veikimą atliekant fizinius judesius susijusius su žmogaus apatinėmis galūnėmis.
VIRŠUTINIU GALUNIU AKTYVAUS PROTEZO PROJEKTAVIMAS TAIKANT 3D TECHNOLOGIJAS
Kipras Varaneckas
Oleg Ardatov
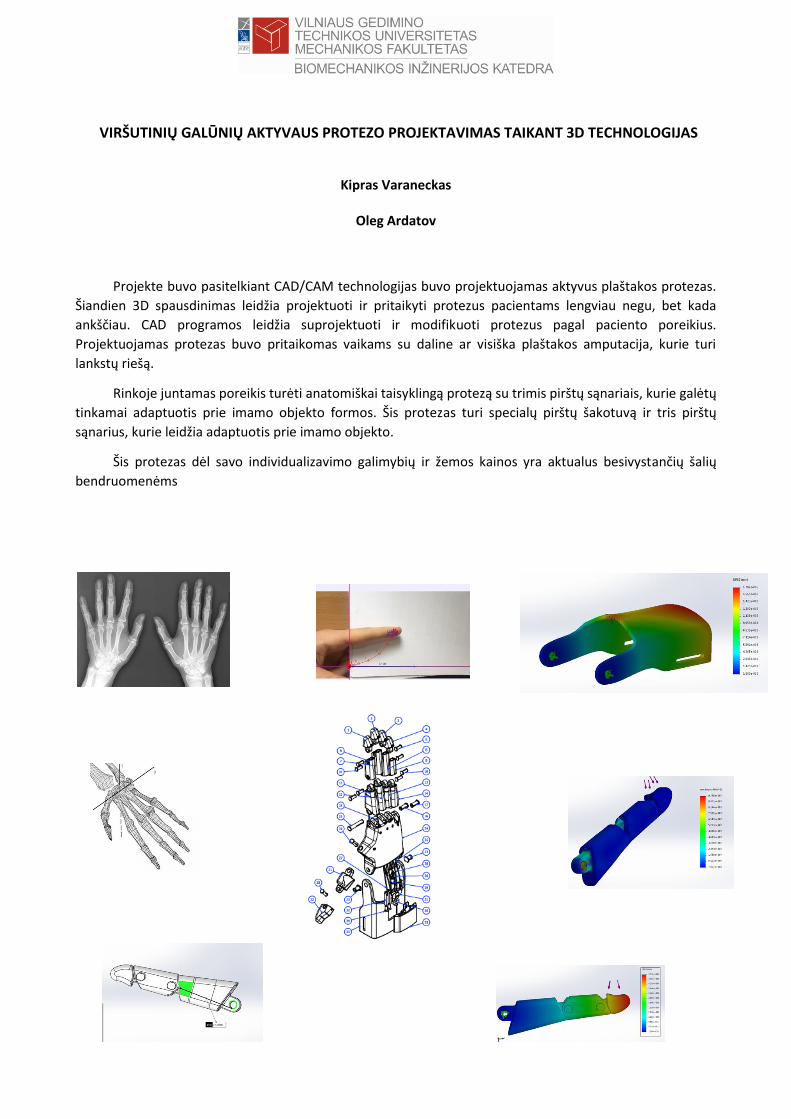
Projekte buvo pasitelkiant CAD/CAM technologijas buvo projektuojamas aktyvus plaštakos protezas.
Šiandien 3D spausdinimas leidžia projektuoti ir pritaikyti protezus pacientams lengviau negu, bet kada
ankščiau. CAD programos leidžia suprojektuoti ir modifikuoti protezus pagal paciento poreikius.
Projektuojamas protezas buvo pritaikomas vaikams su daline ar visiška plaštakos amputacija, kurie turi
lankstų riešą.
Rinkoje juntamas poreikis turėti anatomiškai taisyklingą protezą su trimis pirštų sąnariais, kurie galėtų
tinkamai adaptuotis prie imamo objekto formos. Šis protezas turi specialų pirštų šakotuvą ir tris pirštų
sąnarius, kurie leidžia adaptuotis prie imamo objekto.
Šis protezas dėl savo individualizavimo galimybių ir žemos kainos yra aktualus besivystančių šalių
bendruomenėms

Robotizuoto nugaros įtvaro projektavimas
Jovita Maisiejūtė
Julius Griškevičius
Robotizuotos technologijos vis dažniau naudojamos reabilitacijos klinikose, ligoninėse bei darbo
vietose. Jos naudojamos padėti žmogui, atlikti darbus, pakeičiant jo raumens jėgą, arba siekiant išvengti
pakartotinų susižalojimų. Viena iš tokių technologijų yra robotizuoti stuburo įtvarai. Jie gali būti skirti tiek
žmonėms po traumų, tiek sveikiems žmonėms. Robotizuoti įtvarai gali gebėti atlikti judesį už žmogų,
neapkraunant jo raumens ar pažeistos srities. Taip pat vienas iš pagrindinių tikslų yra išlaikyti funkcionalumą,
kuo mažiau varžant natūralius žmogaus kūno judesius.
Šiame baigiamajame bakalauro darbe suprojektuotas robotizuotas stuburo įtvaras skirtas vartotojui,
kurio darbas susijęs su nuolatiniu daiktų kilnojimu, pernešimu. Pagrindinis tikslas buvo sukurti pakankamai
lengvą, funkcionalų ir ilgai veikiantį robotizuotą įtvarą. Maksimali įtvaro masė yra 4,5 kg – tai yra vidurkis
rinkoje esančių įtvarų, tokia masė neapkrauna vartotojo, jam nėra sunku dėvėti įtvarą visą dieną. Taip pat
gautas darbo laikas yra 5,4 valandos iki baterijų išsikrovimo, kas yra du trečdaliai pilnos darbo dienos, kuomet
įtvaras veiktų be pertraukų. Paskaičiuotas sukimo momentas, imant atskaitos tašką – klubo sąnarį ir pagal jį
parinkti du varikliai ir dvi harmoninės pavaros. Tokiu būdu vartotojas gali pakelti daiktą, kurio masė siekia iki
125 kg. Taigi gautas robotizuotas nugaros įtvaras yra pakankamai lengvas, efektyviai nukrauna nugarai
tenkančias apkrovas ir veikia ilgą laiką, palyginus su kitais rinkos gaminiais.

Mechanoterapinio įtaiso su FES projektavimas viršutinių galūnių reabilitacijai
Ekaterina Zherlitsyna
Vadovas: Gediminas Gaidulis
Žmogus po insulto, eismo įvykių ar kitų situacijų, kai praranda judėjimo funkcijas, dažnai jaučiasi
nereikalingu ir nebegalinčiu toliau gyventi pilnavertiško gyvenimo. Svarbu parodyti jam kita pusę, kad
sutrikusius judesius galima atstatyti ir gyventi kaip anksčiau. Kasdieninės treniruotės su tinkamomis
reabilitacijos priemonėmis, naudojant modernius būdus, gali padėti grąžinti prarastas judėjimo funkcijas net
ir pacientams, kurie visiškai negali valdyti viršutinių galūnių. Dėl to baigiamajame darbe suprojektuotas
viršutinių galūnių reabilitacinis įtaisas su funkcine elektrostimuliacija (FES), kuris padėtų grąžinti žmonėms
tiek fizinį, tiek psichologinį pilnavertiškumą.
Baigiamojo darbo tikslas – suprojektuoti mechanoterapijos įtaisą viršutinių galūnių reabilitacijai su FES,
kuris tiktų daugumai žmonių. Suprojektuotas įtaisas turėtų padėti atstatyti sutrikusias motorines funkcijas
tiek žmonėms, kurių viršutinių galūnių judesiai sutrikę nežymiai, tiek ir tiems, kurie visiškai negali judinti
galūnių.

Šlaunikaulio armuojančio elemento projektavimas, naudojant CAD/CAM/CAE sistemas
Aleksandra Portnova
Oleg Ardatov
Kasmet visame pasaulyje dėl osteoporozės lūžta 1,66 mln. šlaunikaulių. Kas penktuoju atveju
pacientai miršta per pirmuosius metus po lūžio, 50% žmonių lieka neįgaliais. Armuojantis elementas
projektuojamas individualiai šlaunikaulio lūžio prevencijai, norint išvengti lūžio ir tolimesnių komplikacijų,
visiško ne judrumo, funkcijų praradimo, ilgos reabilitacijos, recidivų pavojaus, kaulo išsekimo. Armavimas
yra siūlomas esant didelei lūžio rizikai, paskutiniam osteoporozės lygiui, siekiant sumažinti veikiančias kaulą
apkrovas, palaikyti natūralią judesių amplitudę. Nagrinėjamos skirtingos armuojančių elementų
konstrukcijos bei medžiagos, siekiant rasti optimalų inžinerinį sprendimą osteoporozės sukeltoms
problemoms išspręsti.

Lovos stabilizavimo sistemos greitosios pagalbos automobilyje projektavimas
Karolis Šimkevičius
Julius Griškevičius
Ne paslaptis jog sveikata žmogui yra labai svarbi. Technikos tobulėjimas medicinos bei sveikatos
apsaugos sektoriuose užima labai svarbų vaidmenį. Labai svarbų indėlį gelbėjant gyvybes atneša ir medicinos
darbuotuojų naudojama įranga, pradedant radijo ryšio stotelėmis ir baigiant automatinėmis plaučių
ventiliavimo sistemomis. Transportuojant nukentėjusįjį žmogų greitosios medicinos pagalbos automobiliu,
žmogaus būklė kelionės metu yra labai svarbi. Bendra būklė gali nulemta įvairių faktorių: kelio nelygumai,
vairuotojo patirtis, įvairios situacijos kelyje. Dauguma žino, jog sužeistųjų svarbu nejudinti tam nesant
būtinybės, kol neatvykta į pagalbos teikimo vietą, o būtent kelionė iki ligoninės duobėtomis miesto gatvėmis
ar neasfaltuotais kaimo keliais gali suteikti papildomų indikacijų ir skausmo nekentėjusiam žmogui.
Šiame darbe projektuojamas robotas manipuliatorius skirtas paciento padėties stabilizavimui
transportavimo metu. Sistema matuoja kelionės metu jaučiamas inercijos jėgas ir jas kompensuoja
platformos pagalba, kuri yra sudaryta iš šešių linijinių pavarų. Sistemos pagalba transportuojamas pacientas
nejaučia transportavimo metu patiriamų kelio nelygumų, akseleracijos, stabdymo ar manevravimo.