modeliranje sistema
DESCRIPTION
Translatorni mehanički sistemiModeli fizičkih sistemaTRANSCRIPT
11/20/2008
1
Translatorni mehanički sistemiModeli fizičkih sistema
Modeliranje i simulacija sistema
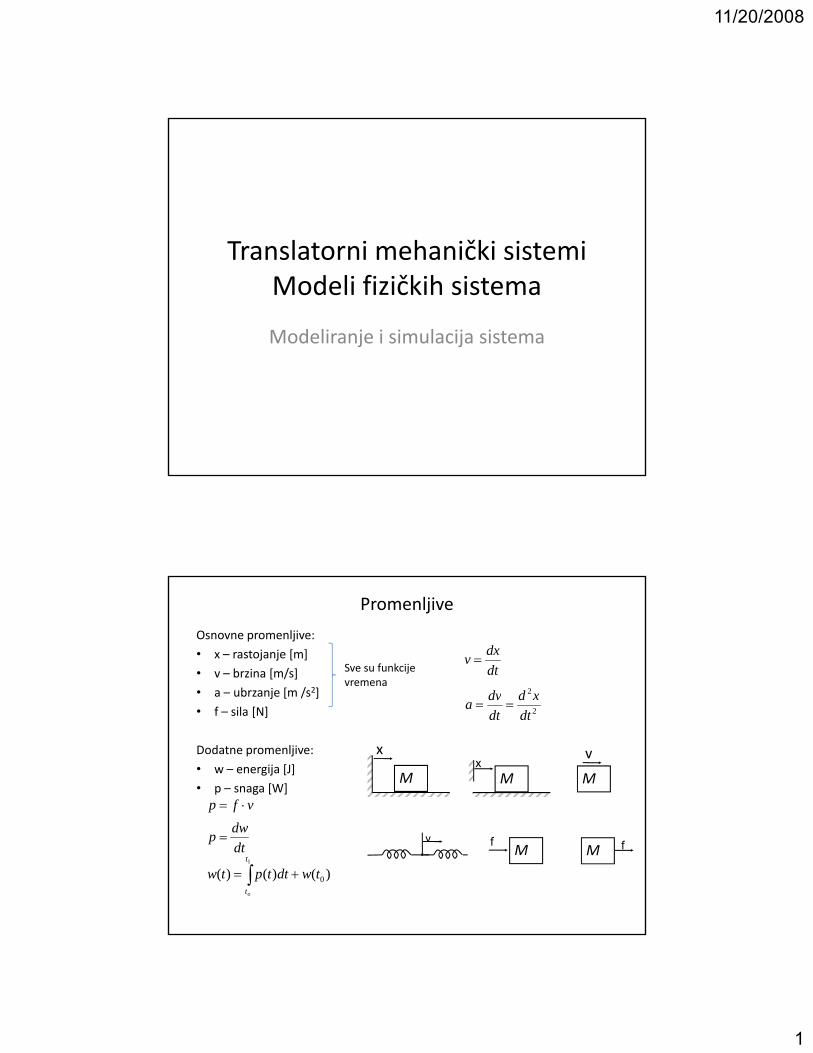
Promenljive
Osnovne promenljive:
• x – rastojanje [m]
• v – brzina [m/s]
• a – ubrzanje [m /s2]
Sve su funkcije vremena
dtdxv =
2xddva ubrzanje [m /s ]
• f – sila [N]
Dodatne promenljive:
• w – energija [J]
• p – snaga [W]
2dtxd
dtdva ==
x
M
v
Mx
M
vfp ⋅=
v fM fMdt
dwp =
∫ +=1
)()()( 0
t
to
twdttptw
11/20/2008
2
Elementi i njihovi zakoni
Posmatramo elemente i pojave:
• Masa
• Trenje
• ElastičnostElastičnost
Masa tela
• Masa tela M [kg]
• II Njutonov zakon:
fvMdtd
=⋅ )( fdtdvM =za M=const
• Energija
– Kinetička
– Potencijalna
dt dt
221 vMwk ⋅=
Mghwp =
11/20/2008
3
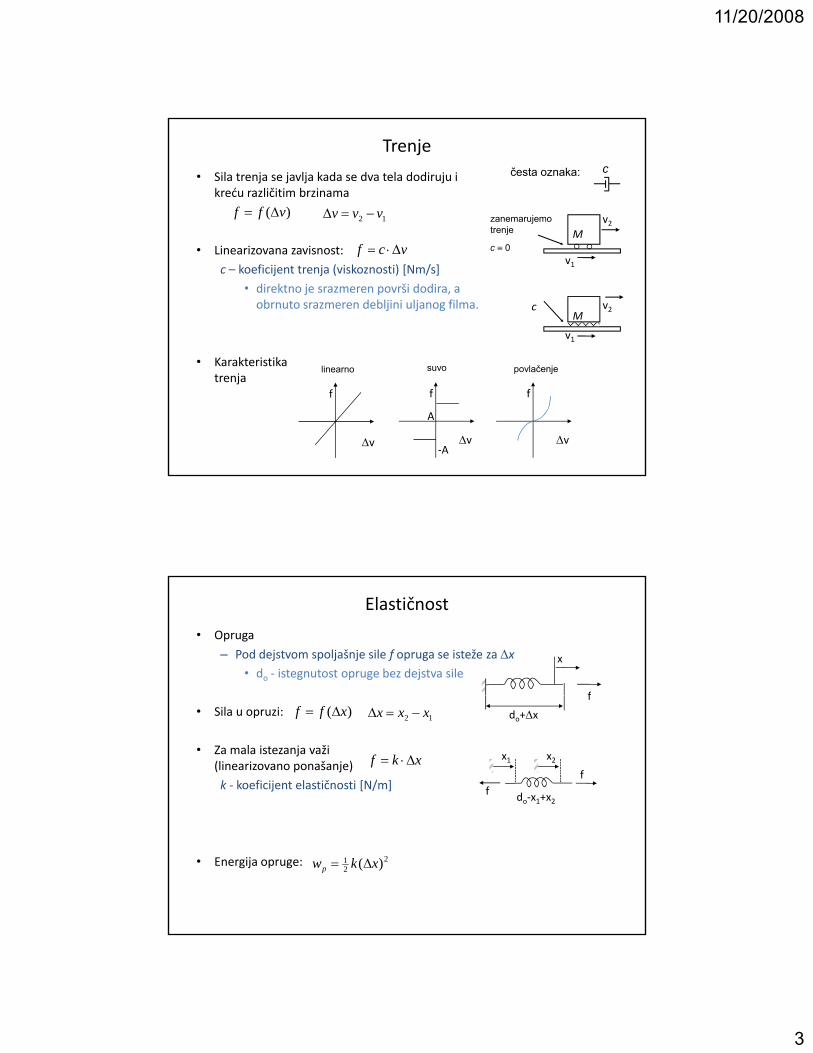
Trenje
• Sila trenja se javlja kada se dva tela dodiruju i kreću različitim brzinama
)( vff Δ= 12 vvv −=Δ zanemarujemo trenje
v2M
česta oznaka: c
• Linearizovana zavisnost:
c – koeficijent trenja (viskoznosti) [Nm/s]
• direktno je srazmeren površi dodira, a obrnuto srazmeren debljini uljanog filma. c
v1
v2M
c ≡ 0v1
Mvcf Δ⋅=
• Karakteristika trenja
Δv
f
linearno
Δv
f
A
‐A
suvo
Δv
f
povlačenje
Elastičnost
• Opruga
– Pod dejstvom spoljašnje sile f opruga se isteže za Δx• do ‐ istegnutost opruge bez dejstva sile
f
x
• Sila u opruzi:
• Za mala istezanja važi (linearizovano ponašanje)
k ‐ koeficijent elastičnosti [N/m]
f
do+Δx)( xff Δ=
xkf Δ⋅=
12 xxx −=Δ
f
do‐x1+x2
x2x1
f
• Energija opruge: 221 )( xkwp Δ=
11/20/2008
4
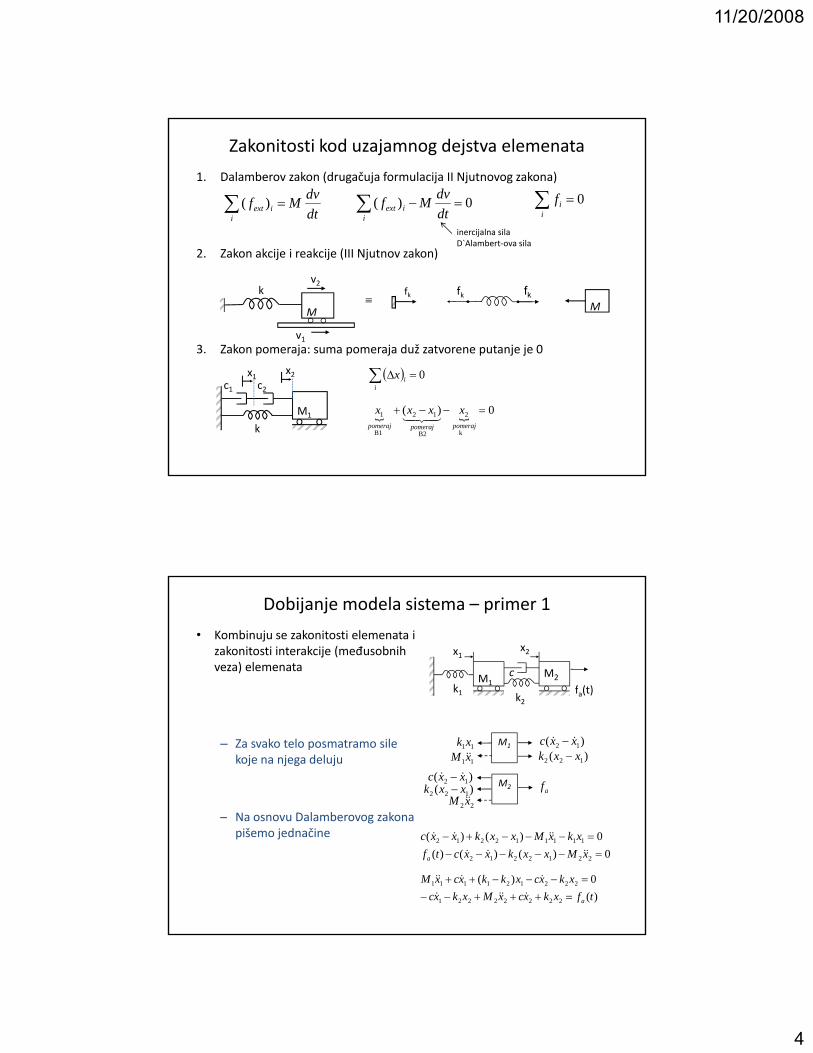
Zakonitosti kod uzajamnog dejstva elemenata
1. Dalamberov zakon (drugačuja formulacija II Njutnovog zakona)
dtdvMf
iiext =∑ )( 0)( =−∑ dt
dvMfi
iext0=∑
iif
inercijalna sila
2. Zakon akcije i reakcije (III Njutnov zakon)
3. Zakon pomeraja: suma pomeraja duž zatvorene putanje je 0
D`Alambert‐ova sila
v1
v2
M
k fk≡fkfk
M
( ) 0=Δ∑i
ix
{ { 0)(
k
2
B2
12
B1
1 =−−+pomerajpomerajpomeraj
xxxx43421M1
k
x1 x2c1 c2
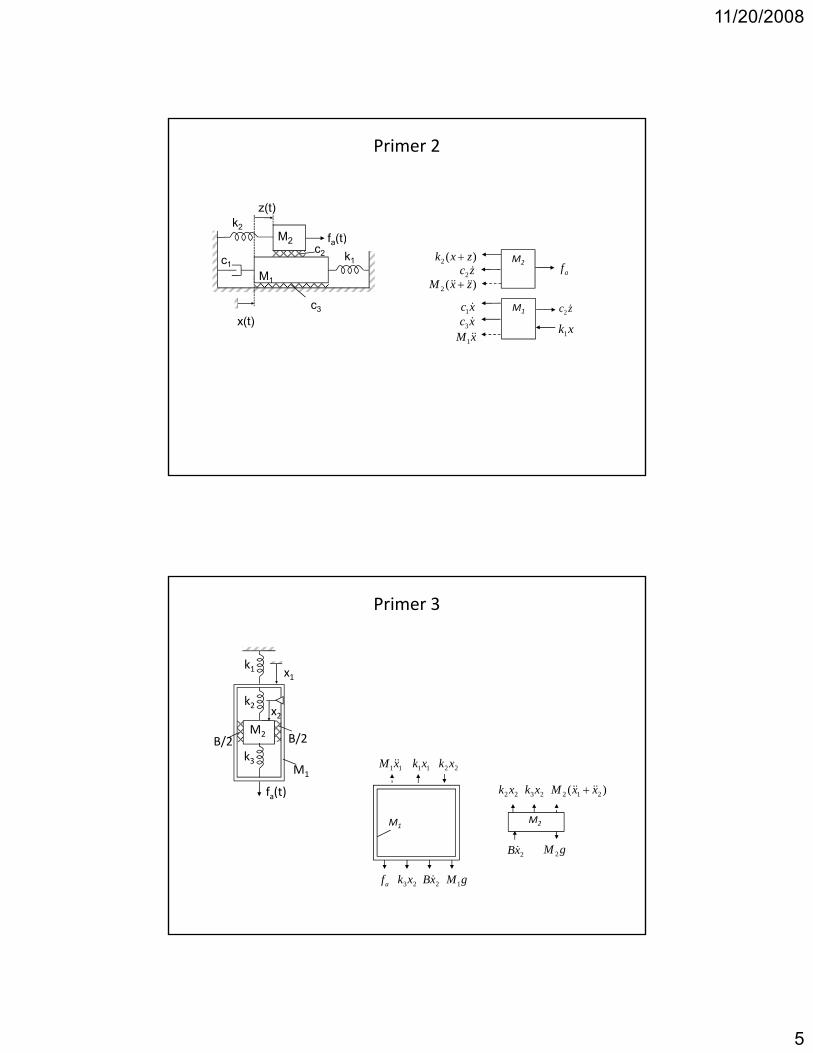
Dobijanje modela sistema – primer 1
• Kombinuju se zakonitosti elemenata i zakonitosti interakcije (međusobnih veza) elemenata
M1M2
k1 k
x1 x2
c
fa(t)
– Za svako telo posmatramo sile koje na njega deluju
Na osnovu Dalamberovog zakona
k2a( )
11xk11xM &&
22xM &&
)( 12 xxc && −)( 122 xxk −
)( 12 xxc && −)( 122 xxk − af
M1
M2
– Na osnovu Dalamberovog zakona pišemo jednačine
0)()()(0)()(
2212212
111112212
=−−−−−=−−−+−
xMxxkxxctfxkxMxxkxxc
a &&&&
&&&&
)(0)(
22222221
222121111
tfxkxcxMxkxcxkxcxkkxcxM
a=+++−−=−−−++
&&&&
&&&&
11/20/2008
5
z(t)
Mk2
f (t)
Primer 2
x(t)
M2
k1c1
fa(t)
M1
c3
c2M2
M1
)(2 zxk +zc &2)(2 zxM &&&& +
xc &1
xc &3
xM &&1
zc &2
xk1
af
Primer 3
k1 x1
k2 x2
fa(t)
M2B/2
k3
B/2
M111xM && 11xk 22xk
22xk 23xk )( 212 xxM &&&& +
M1
gM123xk 2xB&af
2xB& gM 2
M2
11/20/2008
6
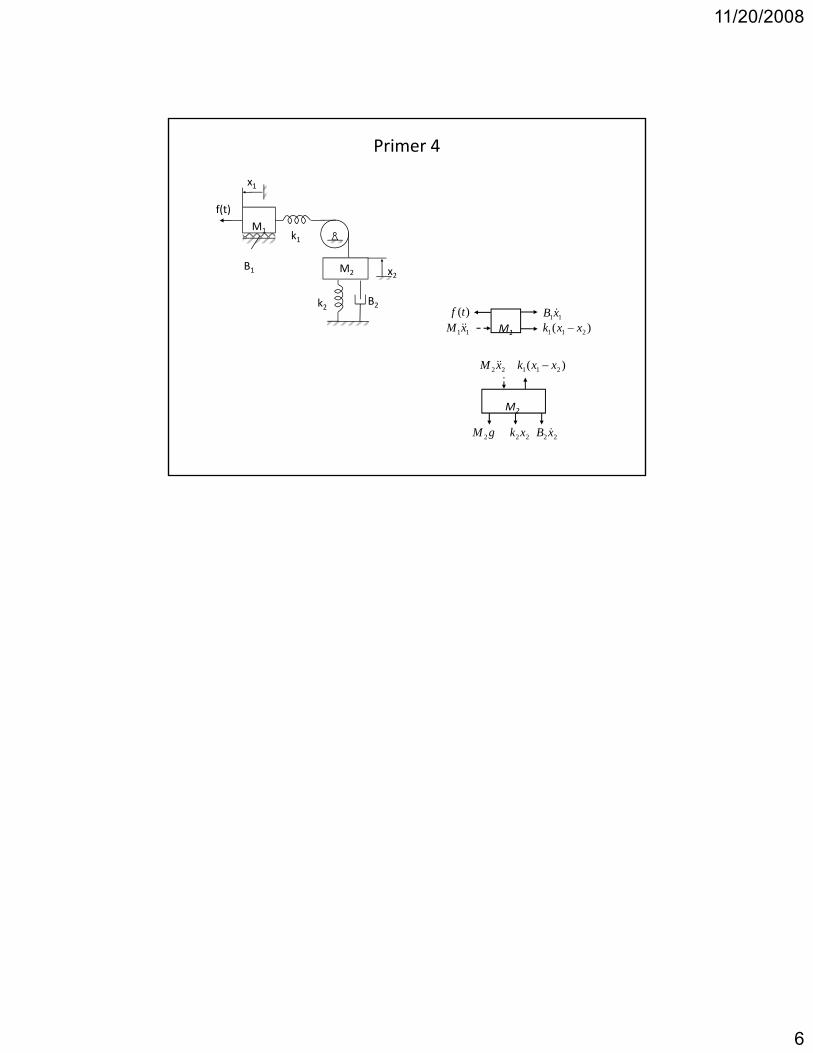
Primer 4
k1
x1
f(t)M1 k1
B2
B1 x2
k2
M2
M111xM && )( 211 xxk −11xB &)(tf
M2
22xkgM 2 22xB &
22xM && )( 211 xxk −
11/20/2008
1
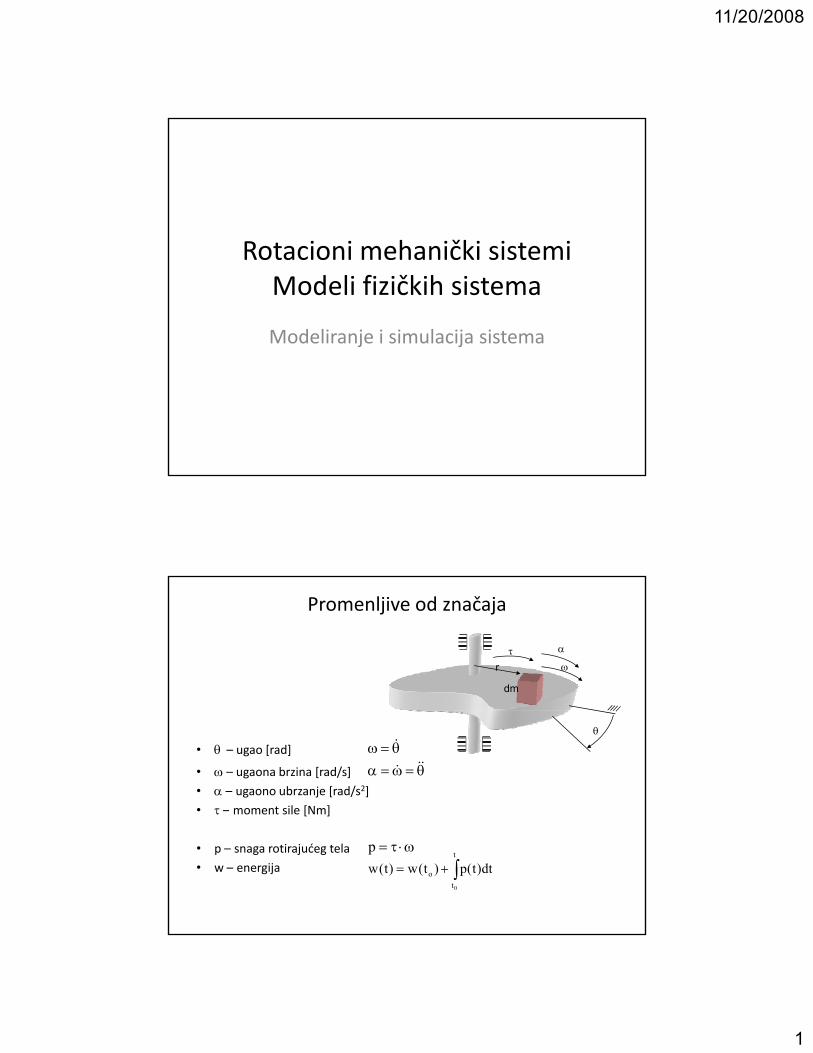
Rotacioni mehanički sistemiModeli fizičkih sistema
Modeliranje i simulacija sistema
Promenljive od značaja
r
dm
τ α
ω
• θ – ugao [rad]
• ω – ugaona brzina [rad/s]
• α – ugaono ubrzanje [rad/s2]
• τ – moment sile [Nm]
ω = θ&θ
α = ω = θ&&&
[ ]
• p – snaga rotirajućeg tela
• w – energija
p = τ ⋅ω
0
t
ot
w(t) w(t ) p(t)dt= + ∫
11/20/2008
2
Zakoni elemenata• Moment inercije
• Trenje usled rotacije
• Elastičnost usled uvrtanja
• PolugaPoluga
• Zupčanici
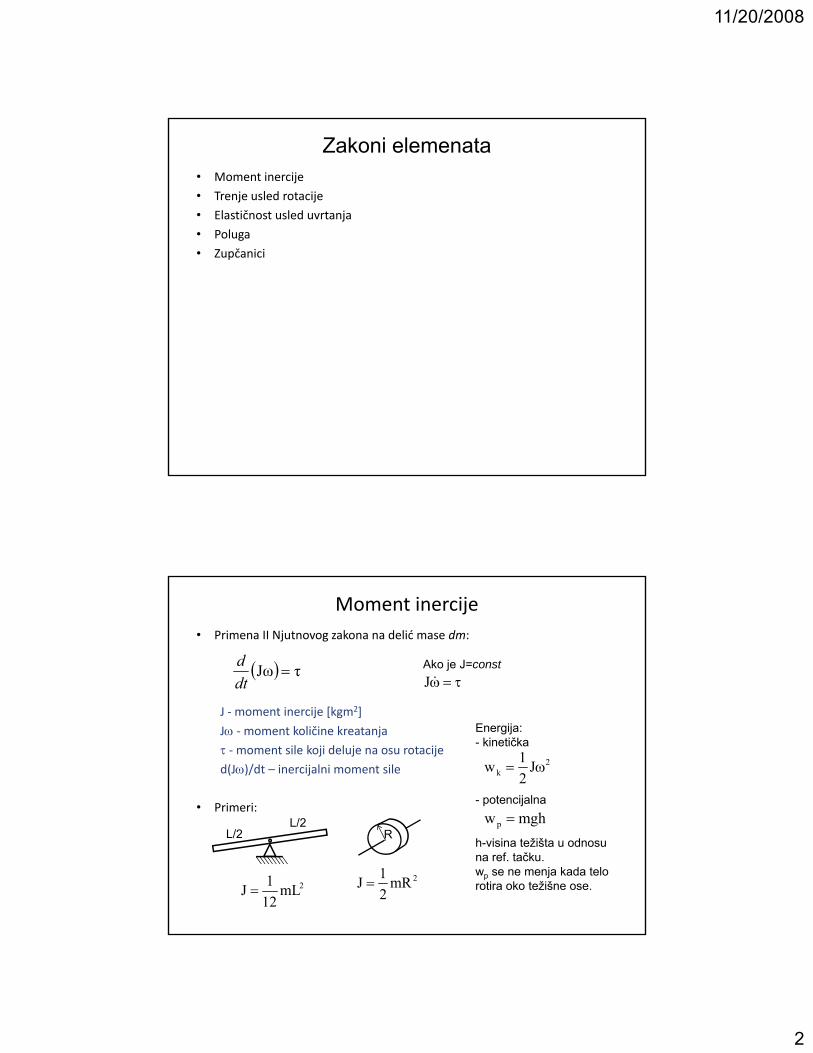
• Primena II Njutnovog zakona na delić mase dm:
Moment inercije
( ) τJω =dtd Ako je J=const
Jω = τ&
J ‐moment inercije [kgm2]
Jω ‐moment količine kreatanja
τ ‐moment sile koji deluje na osu rotacije
d(Jω)/dt – inercijalni moment sile
• Primeri:
Energija:- kinetička
- potencijalna
2k
1w J2
= ω
hh-visina težišta u odnosu na ref. tačku. wp se ne menja kada telo rotira oko težišne ose.21J mL
12=
21J mR2
=
RL/2
L/2pw mgh=
11/20/2008
3
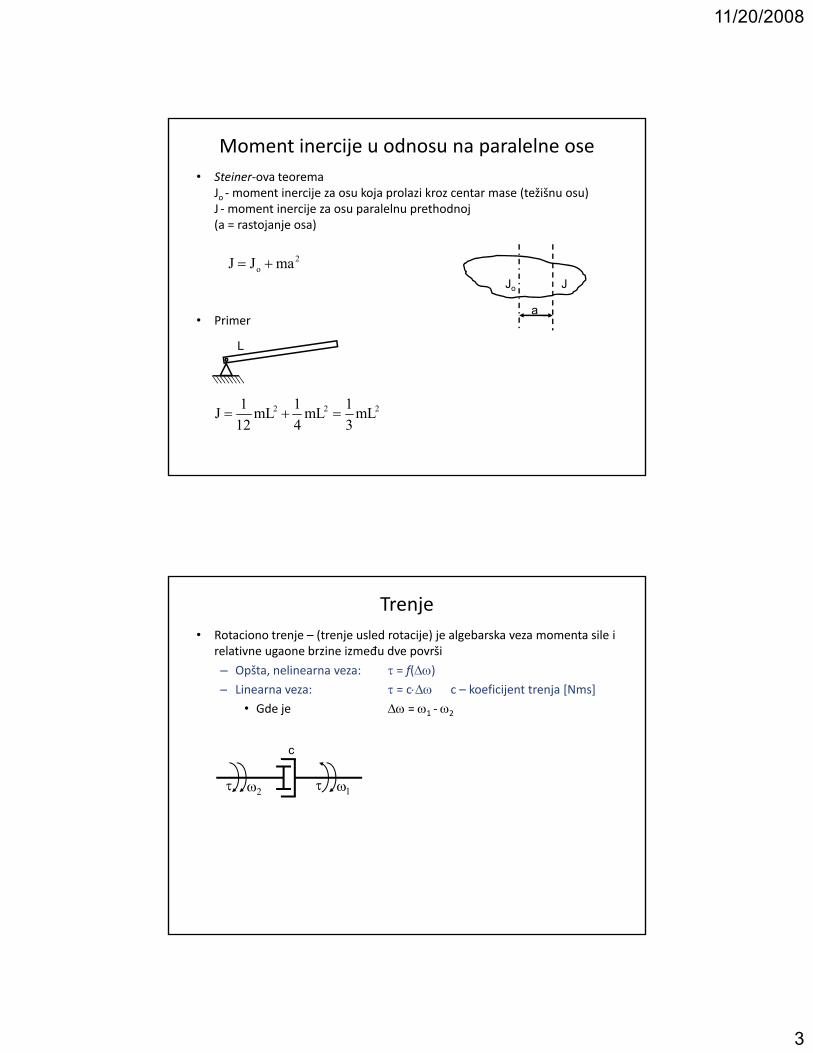
Moment inercije u odnosu na paralelne ose• Steiner‐ova teorema
Jo ‐moment inercije za osu koja prolazi kroz centar mase (težišnu osu)J ‐moment inercije za osu paralelnu prethodnoj(a = rastojanje osa)
• Primer
Jo J
a
2oJ J ma= +
L
2 2 21 1 1J mL mL mL12 4 3
= + =
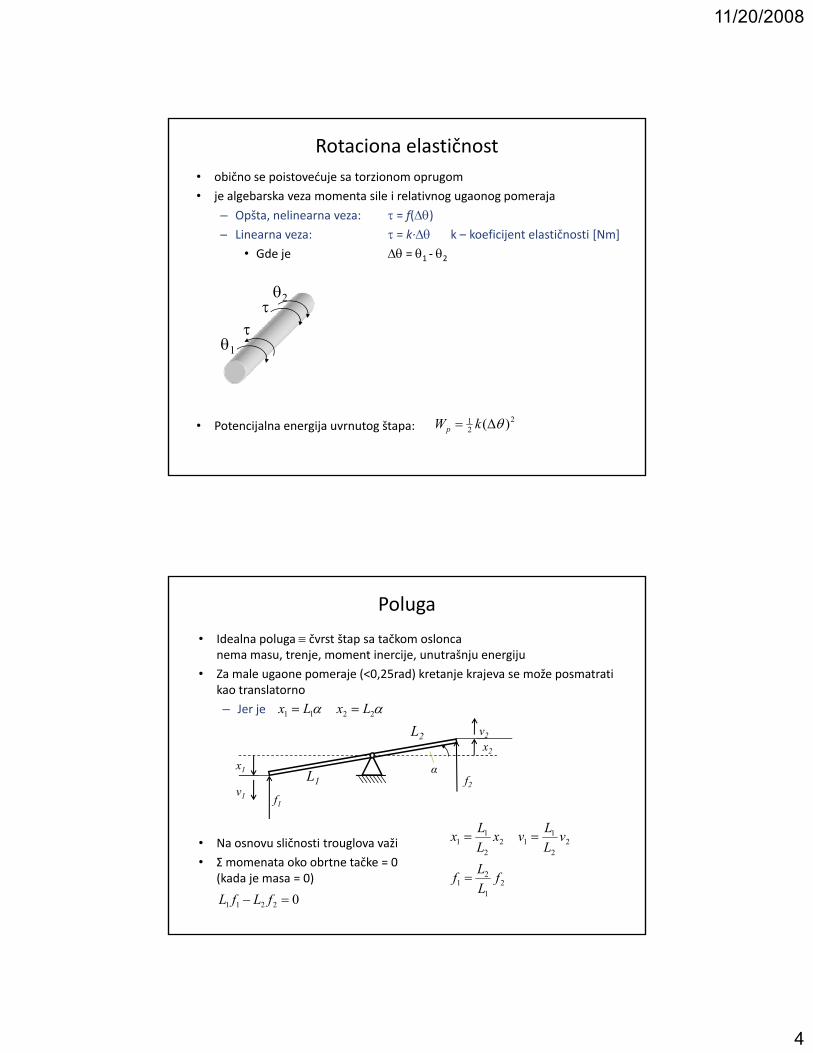
Trenje• Rotaciono trenje – (trenje usled rotacije) je algebarska veza momenta sile i
relativne ugaone brzine između dve površi
– Opšta, nelinearna veza: τ = f(Δω)– Linearna veza: τ = c⋅Δω c – koeficijent trenja [Nms]j j [ ]
• Gde je Δω = ω1 ‐ ω2
τ ω2 τ ω1
c
11/20/2008
4
• obično se poistovećuje sa torzionom oprugom
• je algebarska veza momenta sile i relativnog ugaonog pomeraja
– Opšta, nelinearna veza: τ = f(Δθ)– Linearna veza: τ = k∙Δθ k – koeficijent elastičnosti [Nm]
Rotaciona elastičnost
Linearna veza: τ k Δθ k koeficijent elastičnosti [Nm]
• Gde je Δθ = θ1 ‐ θ2
θ2τ
τθ1
• Potencijalna energija uvrnutog štapa:2
21 )( θΔ= kWp
Poluga
• Idealna poluga ≡ čvrst štap sa tačkom osloncanema masu, trenje, moment inercije, unutrašnju energiju
• Za male ugaone pomeraje (<0,25rad) kretanje krajeva se može posmatrati kao translatorno
– Jer je
L2
L1
x2
x1
v2
v1
f2
f1
α
αα 2211 LxLx ==
• Na osnovu sličnosti trouglova važi
• Σmomenata oko obrtne tačke = 0 (kada je masa = 0)
22
112
2
11 v
LLvx
LLx ==
21
21 f
LLf =
02211 =− fLfL
11/20/2008
5
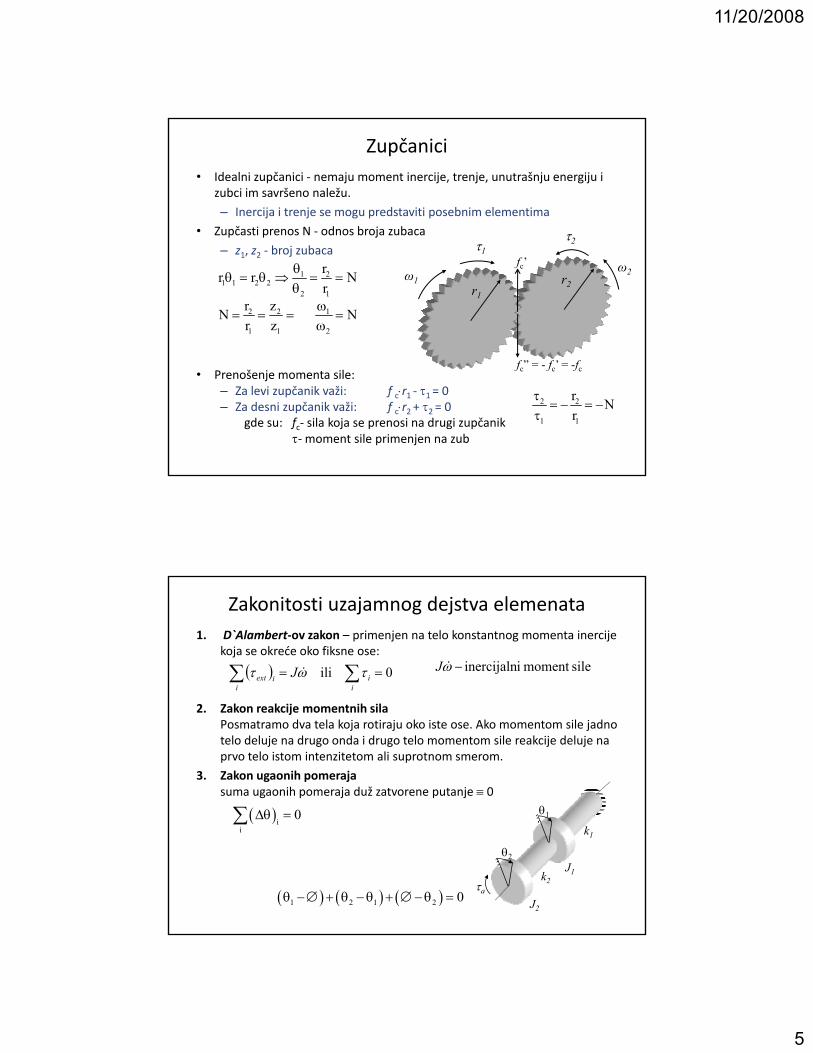
Zupčanici• Idealni zupčanici ‐ nemaju moment inercije, trenje, unutrašnju energiju i
zubci im savršeno naležu.
– Inercija i trenje se mogu predstaviti posebnim elementima
• Zupčasti prenos N ‐ odnos broja zubaca τp p j
– z1, z2 ‐ broj zubacaτ2τ1
ω1ω2
r2r1
fc’
2 2
1 1
r zNr z
= = =
1 21 1 2 2
2 1
rr r Nr
θθ = θ ⇒ = =
θ1
2
Nω=
ω
• Prenošenje momenta sile:– Za levi zupčanik važi: f c⋅r1 ‐ τ1 = 0– Za desni zupčanik važi: f c⋅r2 + τ2 = 0
gde su: fc‐ sila koja se prenosi na drugi zupčanikτ‐moment sile primenjen na zub
fc” = - fc’ = -fc
2 2
1 1
r Nr
τ= − = −
τ
Zakonitosti uzajamnog dejstva elemenata1. D`Alambert‐ov zakon – primenjen na telo konstantnog momenta inercije
koja se okreće oko fiksne ose:
( ) 0ili == ∑∑i
ii
iext J τωτ & silemoment iinercijaln−ω&J
2. Zakon reakcije momentnih silaPоsmatramo dva tela koja rotiraju oko iste ose. Ako momentom sile jadno telo deluje na drugo onda i drugo telo momentom sile reakcije deluje na prvo telo istom intenzitetom ali suprotnom smerom.
3. Zakon ugaonih pomerajasuma ugaonih pomeraja duž zatvorene putanje ≡ 0
( ) 0Δθ =∑ θ1( )ii
0Δθ =∑
( ) ( ) ( )1 2 1 2 0θ −∅ + θ −θ + ∅−θ =τa
1
J2
k2J1
k1
θ2
11/20/2008
6
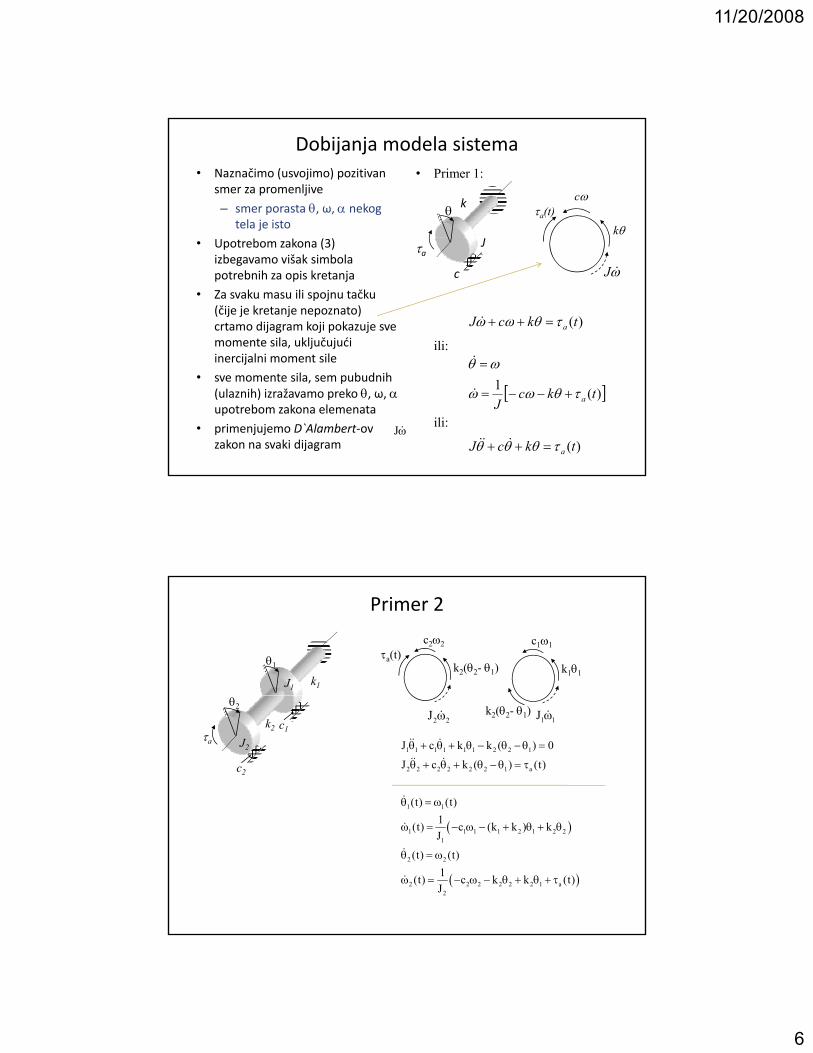
Dobijanja modela sistema• Naznačimo (usvojimo) pozitivan
smer za promenljive
– smer porasta θ, ω, α nekog tela je isto
• Primer 1:
kθ τa(t)kθ
cω
• Upotrebom zakona (3) izbegavamo višak simbola potrebnih za opis kretanja
• Za svaku masu ili spojnu tačku (čije je kretanje nepoznato) crtamo dijagram koji pokazuje svemomente sila, uključujući inercijalni moment sile
ili:
J
c
τa
&
)(tkcJ aτθωω =++&
ω&J
inercijalni moment sile
• sve momente sila, sem pubudnih (ulaznih) izražavamo preko θ, ω, αupotrebom zakona elemenata
• primenjujemo D`Alambert‐ovzakon na svaki dijagram
ili:Jω&
[ ])(1 tkcJ aτθωω
ωθ
+−−=
=
&
&
)(tkcJ aτθθθ =++ &&&
Primer 2
θ1
J1 k1
τa(t)k2(θ2- θ1)
c2ω2
k1θ1
c1ω1
τa J2
k2
θ2
c1
c2
k2(θ2- θ1)2 2J ω& 1 1J ω&
1 1 1 1 1 1 2 2 1
2 2 2 2 2 2 1 a
J c k k ( ) 0
J c k ( ) (t)
θ + θ + θ − θ −θ =
θ + θ + θ − θ = τ
&& &
&& &
1 1(t) (t)θ = ω&
( )
( )
1 1 1 1 2 1 2 21
2 2
2 2 2 2 2 2 1 a2
1(t) c (k k ) kJ
(t) (t)1(t) c k k (t)J
ω = − ω − + θ + θ
θ = ω
ω = − ω − θ + θ + τ
&
&
&
11/20/2008
7
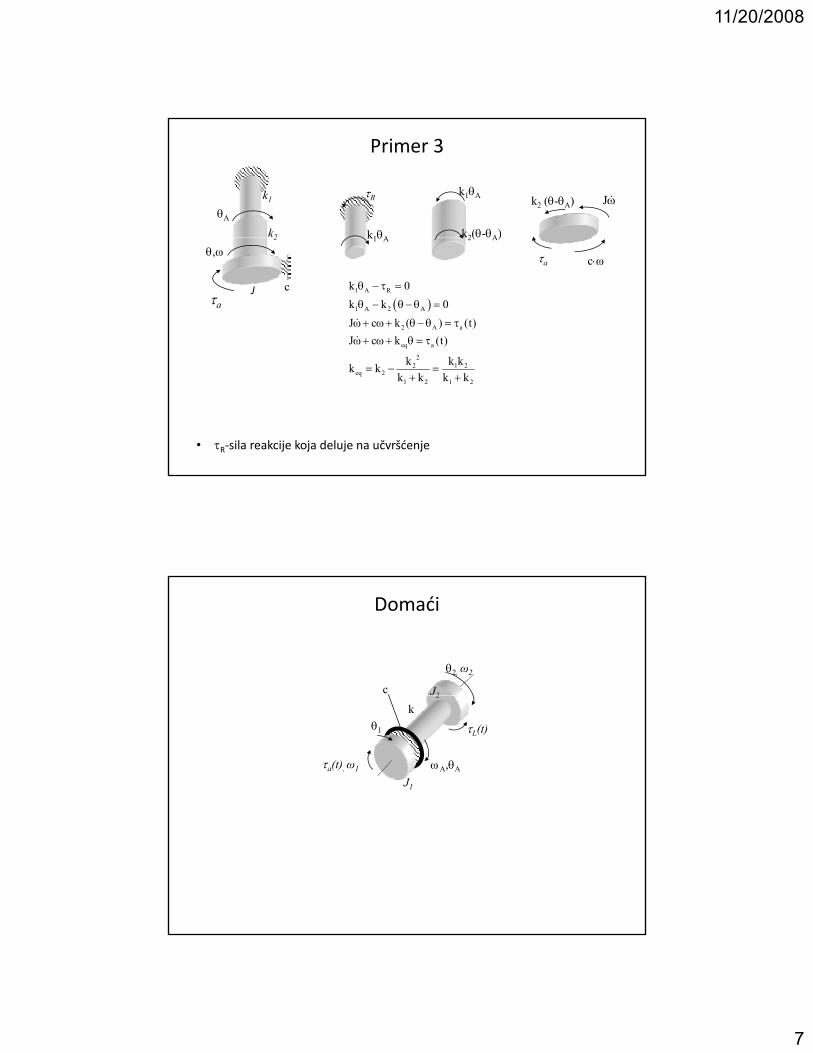
Primer 3
k1θA
τR
k2(θ-θA)
k1θA k2 (θ-θA) Jω&
k2
k1
θA
k1θA k2(θ θA)
τa c⋅ω
2
cτa
θ,ω
J( )
1 A R
1 A 2 A
2 A a
eq a
2
k 0k k 0J c k ( ) (t)J c k (t)
k k k
θ − τ =
θ − θ− θ =
ω+ ω+ θ− θ = τω+ ω+ θ = τ
&
&
• τR‐sila reakcije koja deluje na učvršćenje
22 1 2
eq 21 2 1 2
k k kk kk k k k
= − =+ +
Domaći
θ2, ω2
J2c
θ1
2
k
J1
τa(t), ω1 ωA,θA
τL(t)
11/20/2008
8
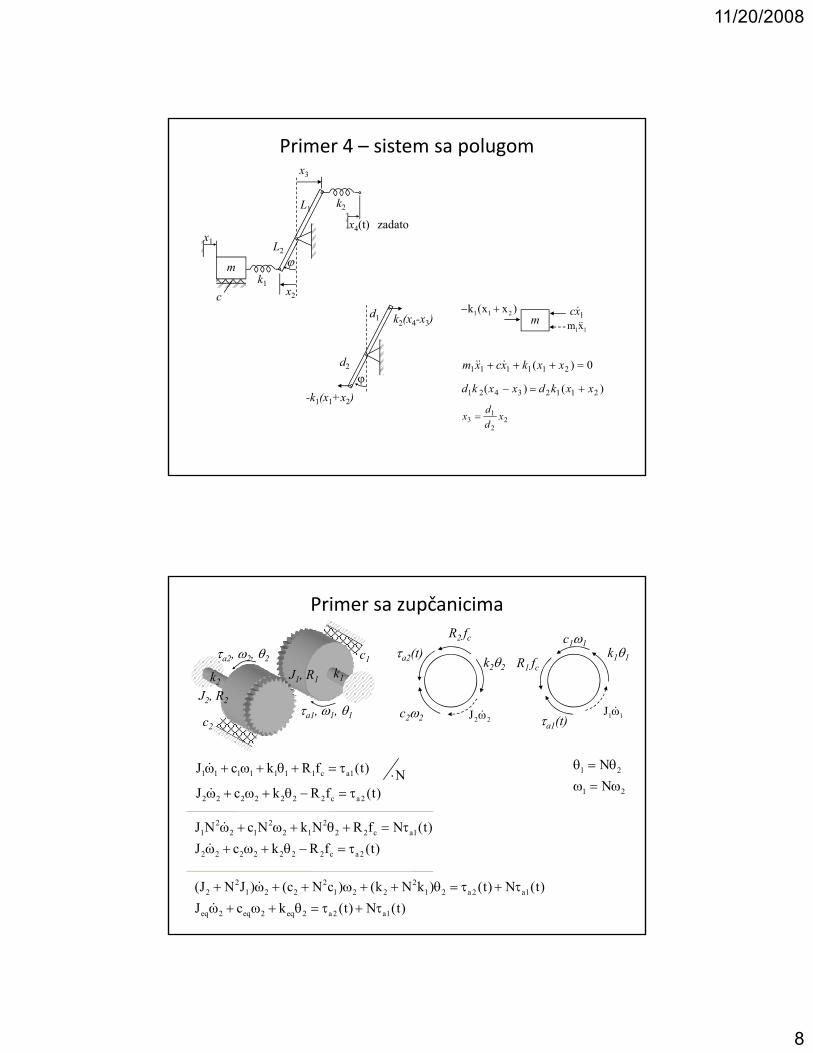
Primer 4 – sistem sa polugom
x
k2
x3
x4(t) zadato
L1
mk1
x1
x2c
L2ϕ
d1 k2(x4-x3) m 1xc&1 1m x&&
1 1 2k (x x )− +
-k1(x1+x2)
d2
ϕ0)( 211111 =+++ xxkxcxm &&&
)()( 21123421 xxkdxxkd +=−
22
13 x
dd
x =
Primer sa zupčanicima
J RJ1, R1k2
k1
c1τa2, ω2, θ2 τa2(t) k2θ2
R2 fc
k1θ1
c1ω1
R1 fc
J2, R2
c2τa1, ω1, θ1 c2ω2 τa1(t)2 2J ω& 1 1J ω&
1 2
1 2
NN
θ = θω = ω
1 1 1 1 1 1 1 c a1
2 2 2 2 2 2 2 c a 2
J c k R f (t) NJ c k R f (t)
ω + ω + θ + = τ ⋅ω + ω + θ − = τ
&
&
2 2 21 2 1 2 1 2 2 c a1
2 2 2 2 2 2 2 c a 2
J N c N k N R f N (t)J c k R f (t)
ω + ω + θ + = τ
ω + ω + θ − = τ
&
&
2 2 22 1 2 2 1 2 2 1 2 a 2 a1
eq 2 eq 2 eq 2 a2 a1
(J N J ) (c N c ) (k N k ) (t) N (t)J c k (t) N (t)
+ ω + + ω + + θ = τ + τ
ω + ω + θ = τ + τ
&
&
11/20/2008
9
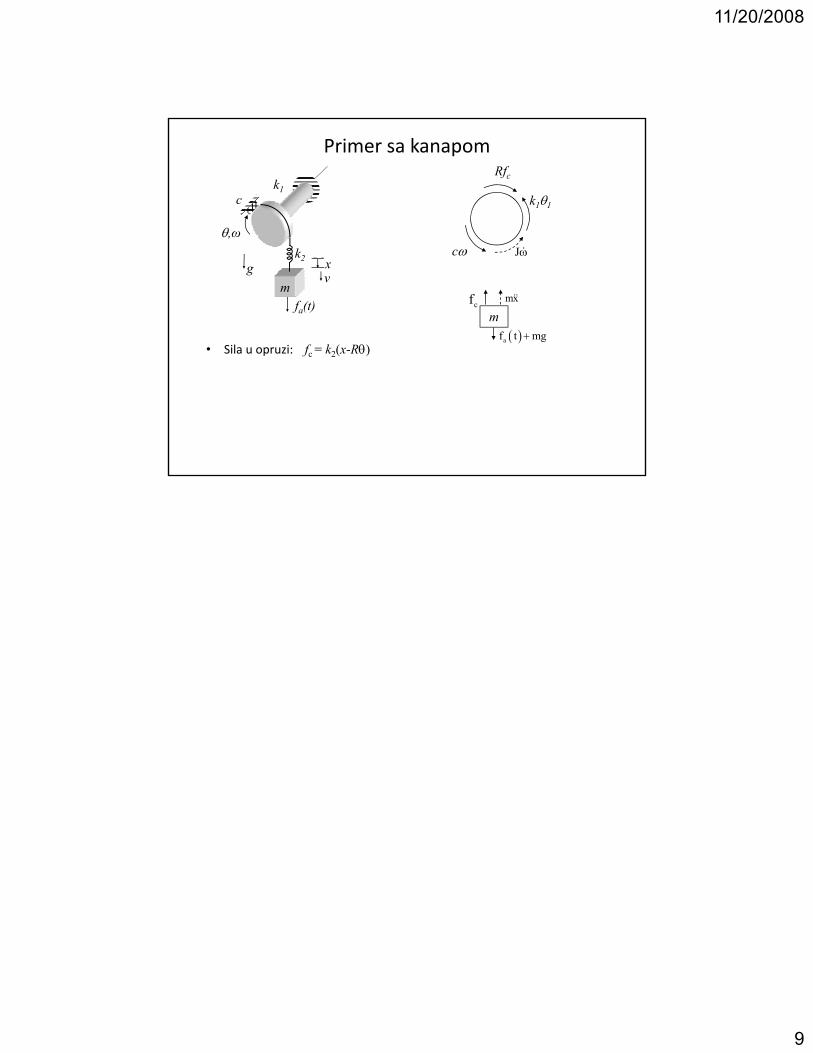
Primer sa kanapom
k1c
θ,ω
k1θ1
Rfc
• Sila u opruzi: fc = k2(x-Rθ)
m
k2
θ,
xv
fa(t)
gcω Jω&
mcf mx&&
( )af t mg+
11/20/2008
1
Termički sistemiModeli fizičkih sistema
Modeliranje i simulacija sistema
Termički sistemi• su sistemi gde postoji skladištenje ili prenos toplote
• Matematički modeli se izvodi na osnovu poznatih zakona termodinamike
• Primeri: termometar, sistem za rashlađivanje, pećnice, frižideri, ...
• Matematički model čineMatematički model čine
– zbog prostorne distribuiranosti → parcijalne diferencijalne jednačine
– koncentrisani parameteri → obične dif. jednačine
– linearizacija → linearne obične dif. jednačine
• Posmatramo sisteme
aproksimacija
aproksimacija
– Bez promene agregatnih stanja
– ne postoje termodinamički ciklusi (u hemijskim procesima)
11/20/2008
2
Promenljive• Temperatura – θ [K]
– obično je u različitim tačkama tela različita
– smatraćemo da je θ u svim tačkama tela ista i jednaka posečnoj temperaturi telap
– ukoliko je bitno da pojedini delovi tela imaju različite θ, onda se telo može posmatrati iz više segmenata
– obično se θ bira za promenljive stanja
– Temperatura ambijenta (spoljašnja temp.) θa• Količina toplote – q [J/s]≡[W]
Stanje ravnoteže• stanje ravnoteže
– gde se odvijaju normalne operacije
• devijacije promenljivih u odnosu na nominalne vrednosti su od interesa kada se posmatraju dinamičke karakteristikep j
θ-θ(t)(t)θ̂ =
(t)q̂qq(t)(t)θ̂θθ(t)
+=+=
q-q(t)(t)q̂θθ(t)(t)θ
==
11/20/2008
3
Elementi u termičkom sistemu• Dva tipa pasivnih elemenata:
– Termička kapacitivnost
– Termička otpornost
• Aktivan elemenatAktivan elemenat
– Termički izvor
Termička kapacitivnost• Postoji algebarska zavisnost između
– temperature tela θ i – akumulirane toplote u njemu Δq
• Ako nema promene agregatnog stanja i θ se menja u uskim granicamaAko nema promene agregatnog stanja i θ se menja u uskim granicama zavisnost se može posmatrati kao linearna
• C ‐ toplotni kapacitet tela [J/K]
( )(t)q-(t)q1(t)θ outinC=& ( )∫+=
t
t
dtC
0
(t)q-(t)q1)θ(tθ(t) outin0
σm ⋅=Cσ ≡ specifična toplota tela
• smatra se da θ tela uniformna
11/20/2008
4
Termička otpornost• Toplota se prenosi na 3 načina:
provođenjem, strujanjem ili zračenjem.• Ovde posmatramo samo provođenje toplote.• Provođenje toplote sa jednog tela na drugo telo je srazmerno razlici
temperatura dva telatemperatura dva tela
• R ≡ termička otpornost [Ks/J]– Karakteristika materijala
• d – debljina• A – površina poprečnog preseka
( )
[ ]1 21q(t) (t) (t)R
= θ −θ
dRA
=α
1q(t)R
= ⋅Δθ
• α – termička provodljivost (kataloški podatak)
• Može se upotrebiti samo ako materijal (telo) ne akumulira energiju. Ukoliko to nije slučaj u model treba dodati i termičku kapacitivnost.
• Odrediti termičku otpornost
Primer
R2R1
θB
q
θ1 θ2
[ ]1 B1
1qR
= θ −θ
θBθ1 θ2
savršena termička izolacija
[ ]1
( )1 1 2 2 1 21 2
1R q R q qR R
= θ −θ − ⇒ = θ −θ+
R R R ij k+ ←
Reqqθ1 θ2
[ ]B 22
2 2 B
1qR
R q
= θ −θ
⇓+ θ = θ
eq 1 2R R R serijska veza= + ←
11/20/2008
5
Primer• Odrediti termičku otpornost cilindrične posude debljine zida T i termičke
provodnosti α
e 2
d 4TRA D
= =α π αL
Term. otp. baze:
ee
1qR
= ΔθD
αT Term. otp. omotača: c
TRDL
=π α
cc
1qR
= Δθ
total e c2 1 1q 2q q
R R R⎛ ⎞
= + = + Δθ = ⋅Δθ⎜ ⎟⎝ ⎠e c eqR R R⎜ ⎟⎝ ⎠
eq c e
1 1 2R R R
⎛ ⎞= +⎜ ⎟⎝ ⎠
Paralelna veza
c eeq
c e
R RR2R R
⋅⇒ =
+
Termički izvor• Tipovi termičkog izvora
– izvor koji dovodi toplotu (određenom brzinom)
• količina toplote koja se do dovede je pozitivna
– izvor koji odvodi toplotuizvor koji odvodi toplotu
• količina toplote koja se do odvede je negativna
• Idealan termički izvor
qi(t)
11/20/2008
6
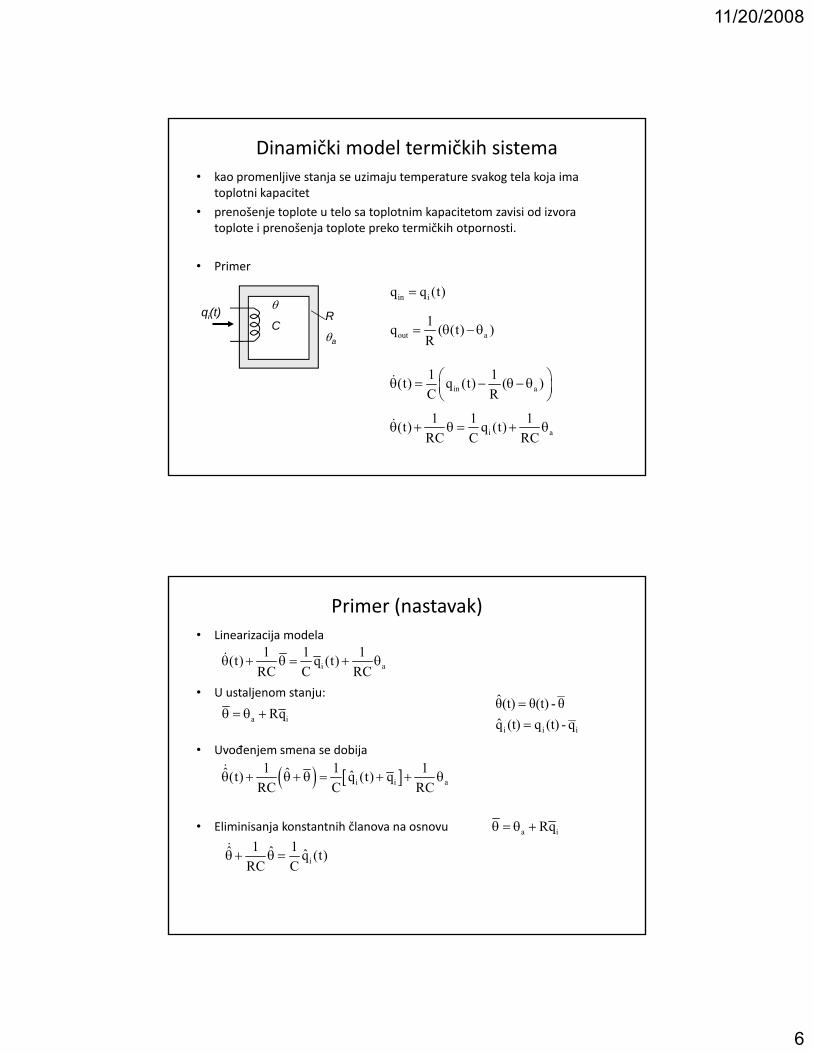
Dinamički model termičkih sistema• kao promenljive stanja se uzimaju temperature svakog tela koja ima
toplotni kapacitet
• prenošenje toplote u telo sa toplotnim kapacitetom zavisi od izvora toplote i prenošenja toplote preko termičkih otpornosti.
• Primer
θ
Cqi(t) R
θa
in iq q (t)=
out a1q ( (t) )R
= θ −θ
in a1 1(t) q (t) ( )C R⎛ ⎞θ = − θ−θ⎜ ⎟⎝ ⎠
&
i a1 1 1(t) q (t)
RC C RCθ + θ = + θ&
Primer (nastavak)• Linearizacija modela
• U ustaljenom stanju:
i a1 1 1(t) q (t)
RC C RCθ + θ = + θ&
ˆU ustaljenom stanju:
• Uvođenjem smena se dobija
a iRqθ = θ +
( ) [ ]i i a1 1 1ˆ ˆ ˆ(t) q (t) q
RC C RCθ + θ+ θ = + + θ&
iii q-(t)q(t)q̂θ-θ(t)(t)θ̂
==
• Eliminisanja konstantnih članova na osnovu
i1 1ˆ ˆ q̂ (t)
RC Cθ+ θ =&
a iRqθ = θ +

11/20/2008
7
Primer• Odrediti
C2
θ2R2
C1
θ1
qi(t) R1 θa( )2 iˆ ˆf q (t) ?θ = =
1 i 1 21 1
1 1(t) q (t) ( )C R
⎛ ⎞θ = − θ −θ⎜ ⎟
⎝ ⎠&
2 1 2 2 a2 1 2
1 1 1(t) ( ) ( )C R R
⎛ ⎞θ = θ −θ − θ −θ⎜ ⎟
⎝ ⎠&
( )
( ) ( )
i 1 21
1q 0R
1 1
− θ − θ =
θ − θ = θ −θ
2 a 2 i
1 a 1 2 i
R q
(R R )q
θ = θ +
θ = θ + + 222
111
θ-(t)θ(t)θ̂
θ-(t)θ(t)θ̂
=
=
( ) ( )1 2 2 a1 2R Rθ − θ = θ −θ
1 1 2 i1 1 1 1
2 2 11 1 2 2 2 2
1 1 1ˆ ˆ ˆ q̂R C R C C
1 1 1ˆ ˆ ˆ( )R C R C R C
θ + θ = θ +
θ + + ⋅θ = θ
&
&
Primer• Formirati model tela
• Aproksimacija 1
σ, ρ, α, AL
θi(t)
Aproksimacija 1
C, θR
θi(t)
C m AL= σ = σρ
in i1q ( )R
= θ −θ
( )i1
RCθ = θ −θ&
nema qout zbog ugaone izolacije
αALR =
σ ‐ specifična toplota tela
C m ALσ σρ
( )i1 1 t
RC RCθ+ θ = θ&
11/20/2008
8
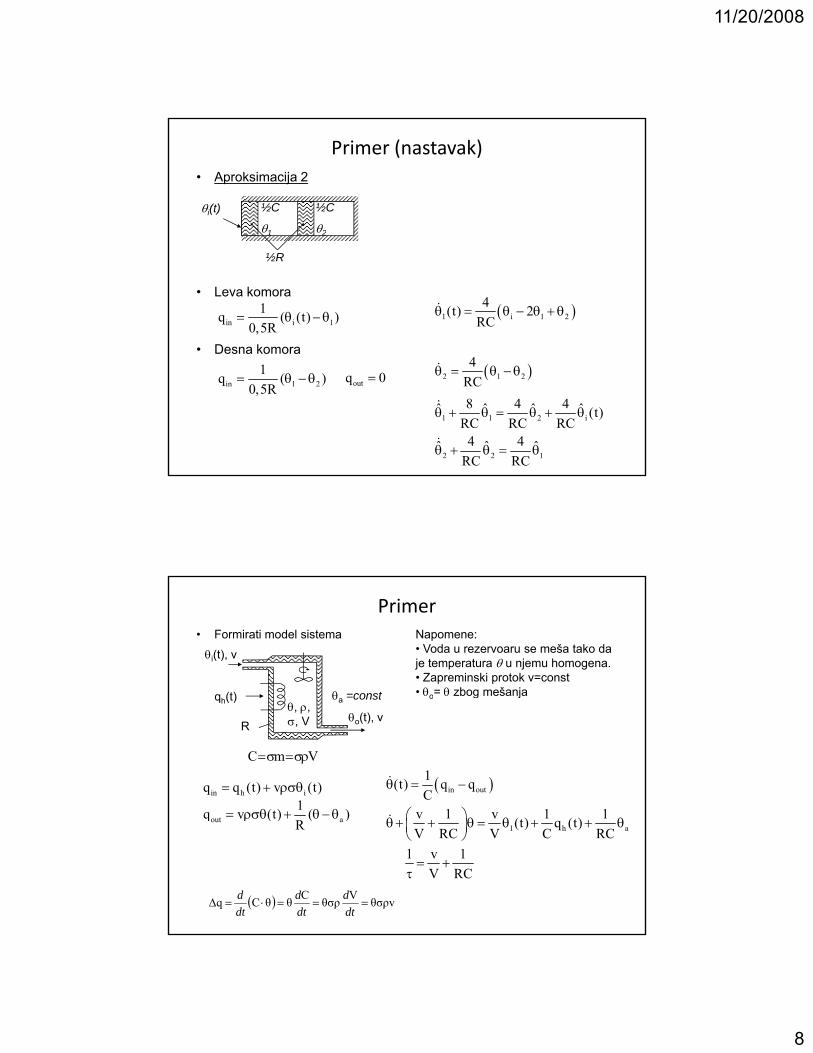
Primer (nastavak)• Aproksimacija 2
½C
θ2
θi(t) ½C
θ1
• Leva komora
• Desna komora
½R
in i 11q ( (t) )
0,5R= θ −θ ( )1 i 1 2
4(t) 2RC
θ = θ − θ + θ&
( )2 1 24
RCθ = θ −θ&
in 1 21q ( )
0,5R= θ −θ outq 0=
1 1 2 i
2 2 1
8 4 4ˆ ˆ ˆ ˆ (t)RC RC RC
4 4ˆ ˆ ˆRC RC
θ + θ = θ + θ
θ + θ = θ
&
&
Primer• Formirati model sistema
θ =constq (t)
θi(t), v
Napomene:• Voda u rezervoaru se meša tako da je temperatura θ u njemu homogena. • Zapreminski protok v=const• θo= θ zbog mešanja
θ, ρ, σ, VR
θa =constqh(t)
θo(t), v
C m V=σ =σρ
( )in out1(t) q qC
θ = −&in h iq q (t) v (t)= + ρσθ
1q v (t) ( )= ρσθ + θ−θ v 1 v 1 1⎛ ⎞&
θo θ zbog mešanja
out aq v (t) ( )R
= ρσθ + θ−θ1 h a
v 1 v 1 1(t) q (t)V RC V C RC
⎛ ⎞θ+ + θ = θ + + θ⎜ ⎟⎝ ⎠
&
1 v 1V RC
= +τ
( ) θσρvVθσρCθθCq ===⋅=Δdtd
dtd
dtd
11/20/2008
9
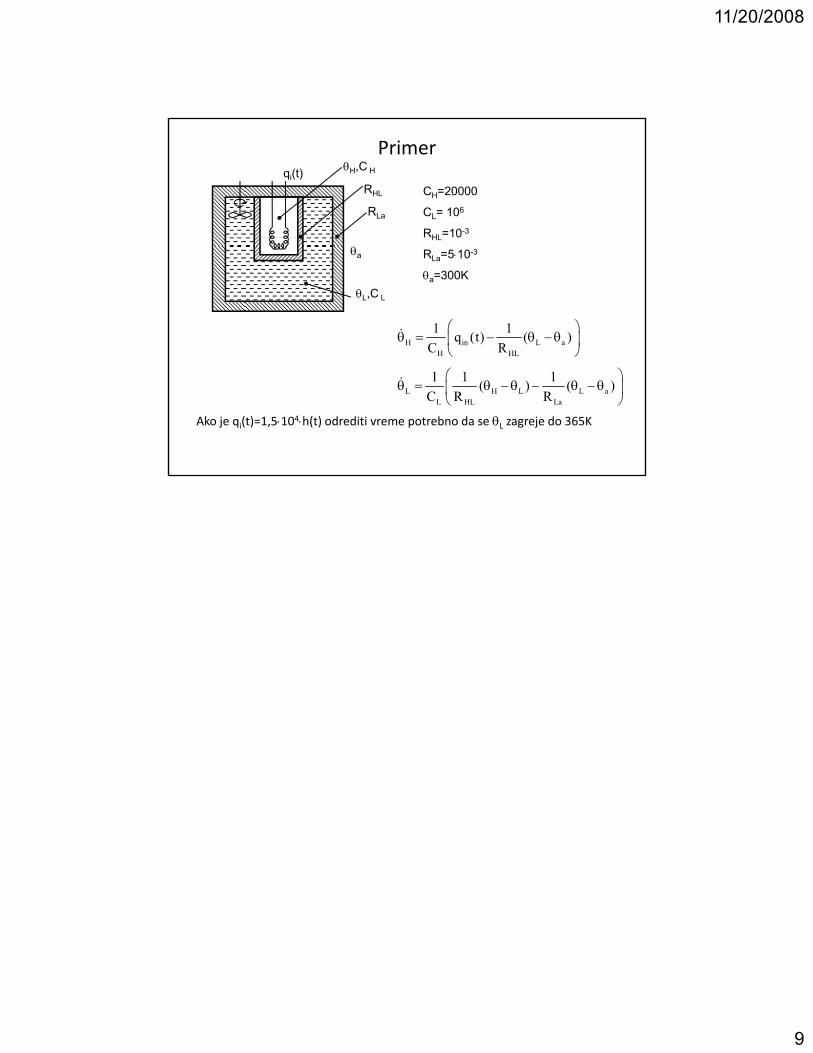
Primer
CH=20000
CL= 106
RHL=10-3
qi(t)θH,C H
RHL
RLa
RHL 10
RLa=5⋅10-3
θa=300K
H in L aH HL
1 1q (t) ( )C R
⎛ ⎞θ = − θ −θ⎜ ⎟
⎝ ⎠&
θa
θL,C L
Ako je qi(t)=1,5⋅104⋅h(t) odrediti vreme potrebno da se θL zagreje do 365K
⎝ ⎠
L H L L aL HL La
1 1 1( ) ( )C R R
⎛ ⎞θ = θ −θ − θ −θ⎜ ⎟
⎝ ⎠&
11/20/2008
1
Sistemi sa fluidimaModeli fizičkih sistema
Modeliranje i simulacija sistema
Sistem sa fluidimaPostoje u brojnim sistemima
• hidraulički sistemi postoje u hemijskim procesima, SAU, ...
• povezani sa mehaničkim sistemima preko pumpi, ventila, klipova, ...
– turbina pokretana vodom = hidraulički + mehanički + električni sistemturbina pokretana vodom hidraulički + mehanički + električni sistem
Posmatramo jednostavne slučajeve
• Analiza hidrauličkih sistema je složena zbog njihove distribuiranosti i nelinearnog (karaktera) otpora proticanju
• Ne razmatramo stišljive fluide – vazduh i druge gasove
• Posmatramo pojednostavljen – linearan model( )(u većini slučajeva za to ima opravdanja jer postoji jedna radna tačka)
11/20/2008
2
PromenljiveHidraulički sistemi uključuju protok i akumlaciju tečnosti, te su bitni:
• q – zapreminski protok [m3/s]
• V – zapremina [m3]
• h – visina (nivo) tečnosti [m]h visina (nivo) tečnosti [m]
• p – pritisak [N/m2] ili [Pa]
– obično se posmatra apsolutni pritisak, a ponekad relativno u odnosu na atmosferski: p*(t)= p(t)‐pa pa=1,013∙105 [N/m2]
Zakonitosti elemenata• Postoje 2 karakteristike koje se mogu predstaviti pojednostavljenim
elementima:
– Kapacitet posude za tečnosti
– Otpor proticanjup p j
11/20/2008
3
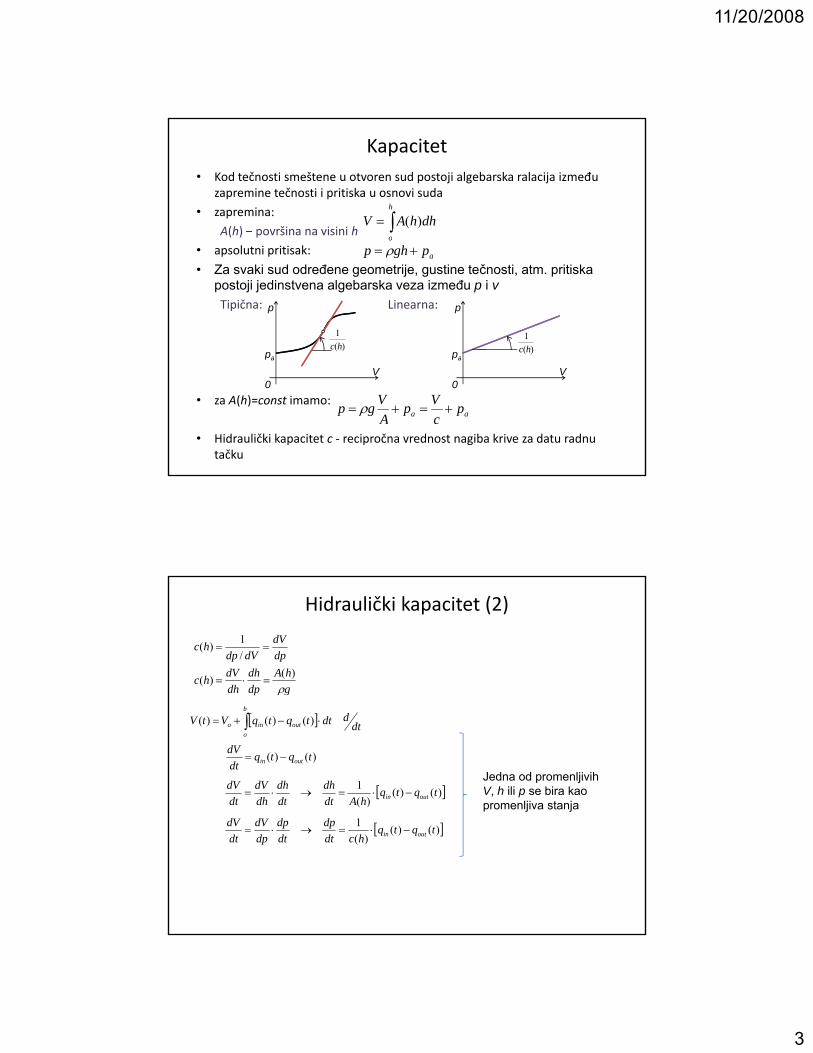
Kapacitet• Kod tečnosti smeštene u otvoren sud postoji algebarska ralacija između
zapremine tečnosti i pritiska u osnovi suda
• zapremina:
A(h) – površina na visini h ∫=h
o
dhhAV )(( ) p
• apsolutni pritisak:
• Za svaki sud određene geometrije, gustine tečnosti, atm. pritiska postoji jedinstvena algebarska veza između p i vTipična: Linearna:
o
apghp += ρ
p
pa)(
1hc
p
pa)(
1hc
• za A(h)=const imamo:
• Hidraulički kapacitet c ‐ recipročna vrednost nagiba krive za datu radnu tačku
Vpa
0V
pa
0
aa pcVp
AVgp +=+= ρ
Hidraulički kapacitet (2)
ghA
dpdh
dhdVhc
dpdV
dVdphc
ρ)()(
/1)(
=⋅=
==
[ ] dtddttqtqVtV
b
ooutino )()()( ⋅−+= ∫
)()( tqtqdtdV
outin −=
[ ])()()(
1 tqtqhAdt
dhdtdh
dhdV
dtdV
outin −⋅=→⋅=Jedna od promenljivih V, h ili p se bira kao promenljiva stanja
[ ])()()(
1 tqtqhcdt
dpdtdp
dpdV
dtdV
outin −⋅=→⋅=
11/20/2008
4
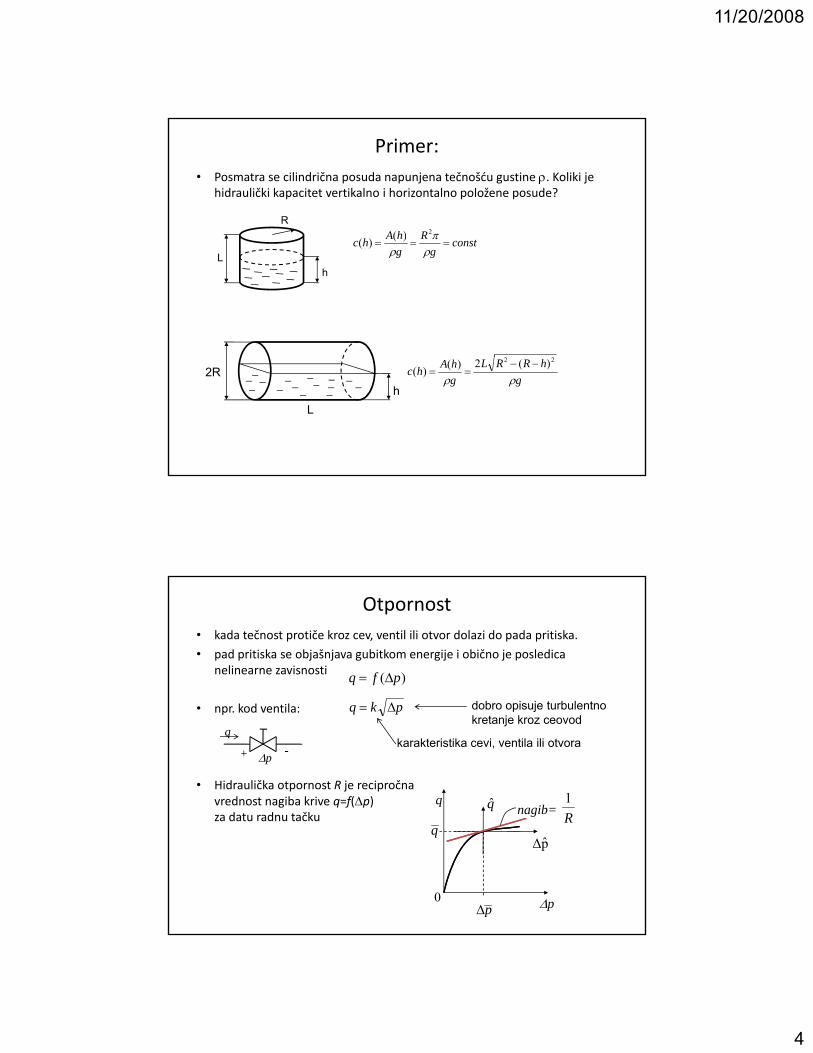
Primer:• Posmatra se cilindrična posuda napunjena tečnošću gustine ρ. Koliki je
hidraulički kapacitet vertikalno i horizontalno položene posude?
RhA π2)(R
constg
RghAhc ===
ρπ
ρ)()(
hL
ghRRL
ghAhc
ρρ
22 )(2)()(−−
==
h2R
L
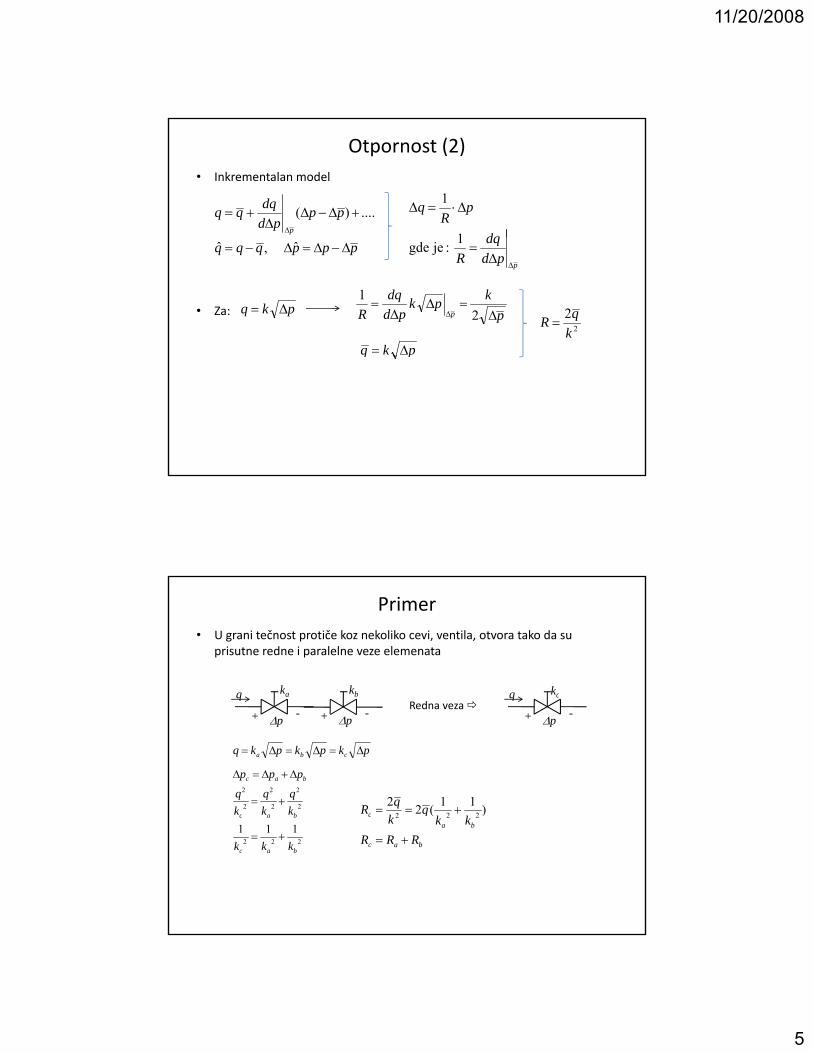
Otpornost• kada tečnost protiče kroz cev, ventil ili otvor dolazi do pada pritiska.
• pad pritiska se objašnjava gubitkom energije i obično je posledica nelinearne zavisnosti )( pfq Δ=
• npr. kod ventila:
• Hidraulička otpornost R je recipročna vrednost nagiba krive q=f(Δp)za datu radnu tačku
dobro opisuje turbulentno kretanje kroz ceovod
karakteristika cevi, ventila ili otvora
pkq Δ=
q-+ Δp
q̂ nagib=q
R1
za datu radnu tačku
0 Δp
gq
pΔ
p̂Δ
R
11/20/2008
5
Otpornost (2)• Inkrementalan model
pppd
dqqqp
+Δ−ΔΔ
+=Δ
....)(
dq
pR
q Δ⋅=Δ
1
1
• Za:
pppqqq Δ−Δ=Δ−= ˆ ,ˆppd
dqR ΔΔ=
1 :je gde
pkq Δ= pkpk
pddq
R p Δ=Δ
Δ=
Δ 21
2
2kqR =
pkq Δ= pq
Primer• U grani tečnost protiče koz nekoliko cevi, ventila, otvora tako da su
prisutne redne i paralelne veze elemenata
q kcq ka kb q-+ Δp
cq-+ Δp
a
-+ Δp
b
pkpkpkq cba Δ=Δ=Δ=
c qkqR +== )11(22
222
Redna veza
2
2
2
2
2
2
bac
bac
kq
kq
kq
ppp
+=
Δ+Δ=Δ
bac
bac
RRRkk
qk+=
)( 222
222111
bac
bac
kkk+=
11/20/2008
6
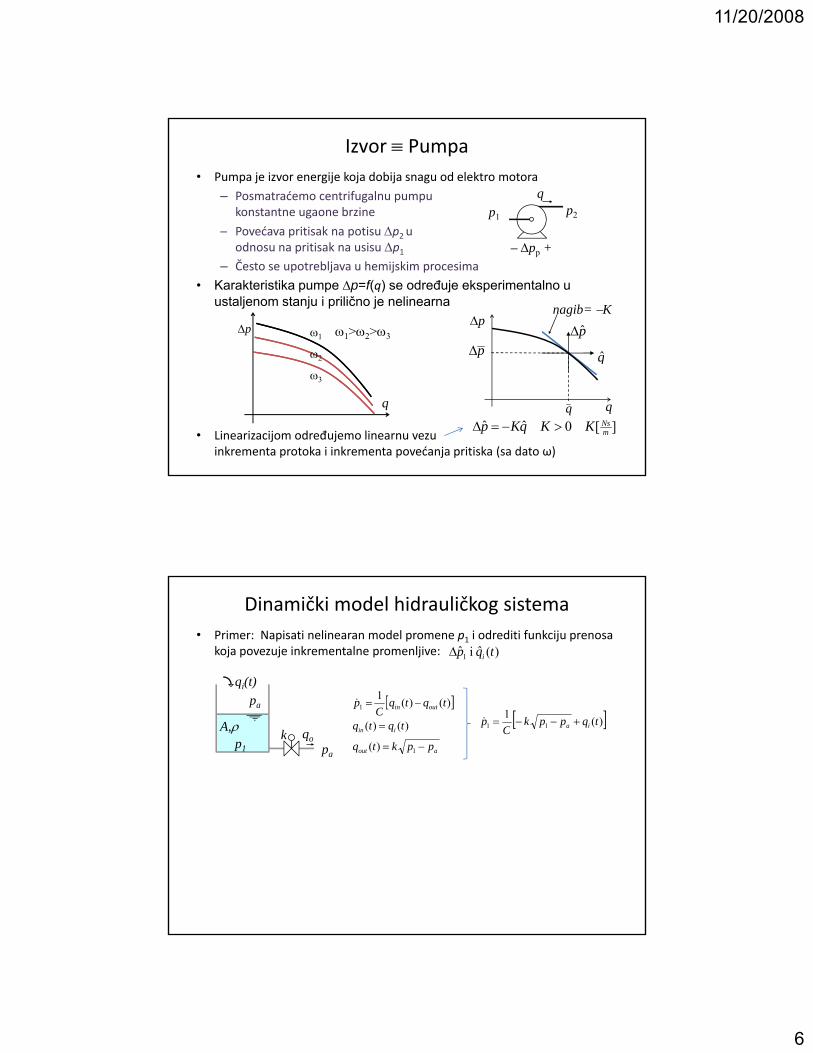
Izvor ≡ Pumpa• Pumpa je izvor energije koja dobija snagu od elektro motora
– Posmatraćemo centrifugalnu pumpu konstantne ugaone brzine
– Povećava pritisak na potisu Δp2 u p1
qp2
p p p2 odnosu na pritisak na usisu Δp1
– Često se upotrebljava u hemijskim procesima
• Karakteristika pumpe Δp=f(q) se određuje eksperimentalno u ustaljenom stanju i prilično je nelinearna
– Δpp +
Δp ω1
ω2
ω1>ω2>ω3Δp
nagib= −Kp̂Δ
q̂pΔ
• Linearizacijom određujemo linearnu vezu inkrementa protoka i inkrementa povećanja pritiska (sa dato ω)
q
ω2
ω3
q
q
q][0ˆˆ m
NsKKqKp >−=Δ
p
Dinamički model hidrauličkog sistema• Primer: Napisati nelinearan model promene p1 i odrediti funkciju prenosa
koja povezuje inkrementalne promenljive:
qi(t)
)(ˆ i ˆ1 tqp iΔ
1
k qop1 pa
pa
A,ρ
[ ])()(11 tqtq
Cp outin −=&
)()( tqtq iin =
aout ppktq −= 1)(
[ ])(111 tqppk
Cp ia +−−=&
11/20/2008
7
Linearizacija modela iz primera1. U ustaljenom stanju:
2. Predstava linearnih članova:
3. Linearzicija nelinearnog člana i
4. skraćivanje konstantnih članova
)(ˆ)()(ˆ)( 111 tqqtqtpptp ii +=+=ia qppkp =−⇒= 10&
221
1ia q
kpp ⋅+=
4. skraćivanje konstantnih članova
– Na osnovu:
– Dobijamo:
[ ]
)(ˆ)(ˆ2
11
)(ˆ)(ˆ1)(ˆ
11
1
111
tqqtppp
ppkC
tqqpptpkC
tp
iia
a
iia
=⎥⎥⎦
⎤
⎢⎢⎣
⎡++⎟
⎟⎠
⎞⎜⎜⎝
⎛
−−−−=
=++−+−=&
...2
1
00
+Δ+≈Δ+ xx
xxxx
x
– Konačno:
2
2kqR i=
)(ˆ1)(ˆ2 1 tq
Ctp
qk
Ck
ii
+−
=
RC
Ci s
sHtqC
tpRC
tp1
1
11 )()(ˆ1)(ˆ1)(ˆ+
=⎯→⎯=+&
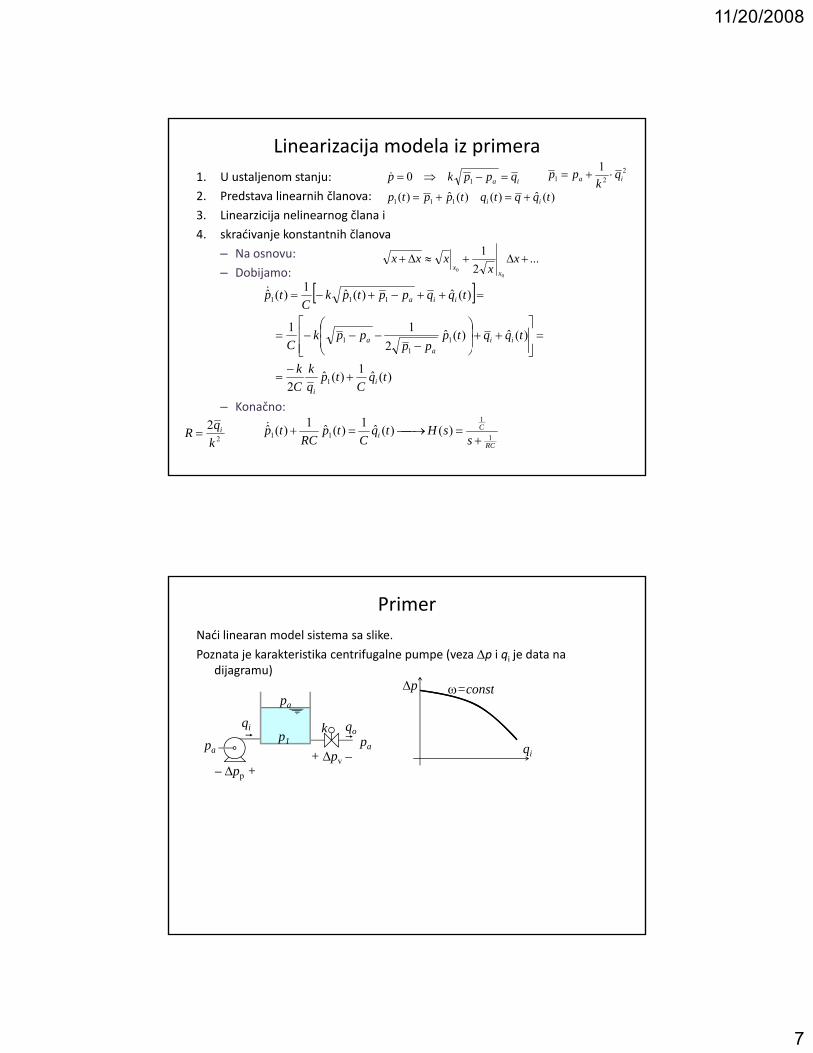
PrimerNaći linearan model sistema sa slike.
Poznata je karakteristika centrifugalne pumpe (veza Δp i qi je data na dijagramu)
Δp ω=const
k qop1 pa
pa
pa
qi
– Δpp ++ Δpv – qi
11/20/2008
8
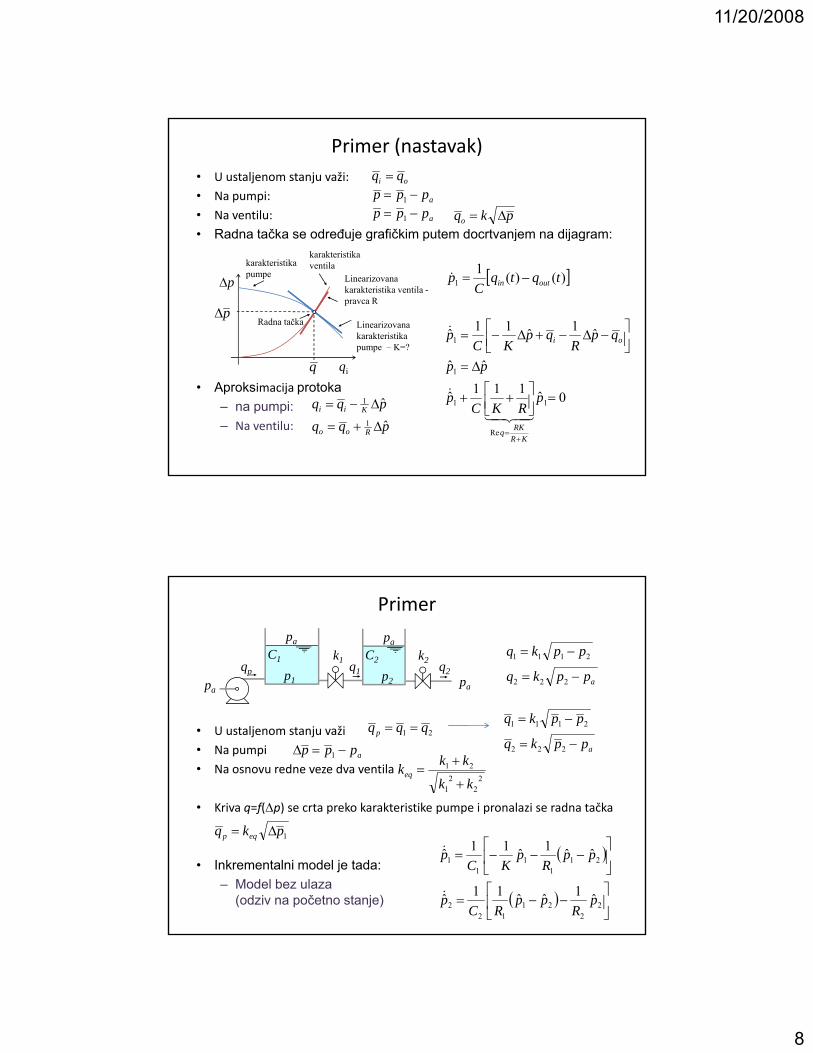
Primer (nastavak)• U ustaljenom stanju važi:
• Na pumpi:
• Na ventilu:
• Radna tačka se određuje grafičkim putem docrtvanjem na dijagram:
oi qq =
appp −= 1
pkqo Δ=appp −= 1
Radna tačka se određuje grafičkim putem docrtvanjem na dijagram:
ˆ1ˆ11ˆ1 ⎥⎦⎤
⎢⎣⎡ −Δ−+Δ−= qp
Rqp
KCp oi&
Δp
Radna tačka
karakteristika ventilakarakteristika
pumpe Linearizovana karakteristika ventila -pravca R
Linearizovana karakteristika pumpe – K=?
pΔ
[ ])()(11 tqtq
Cp outin −=&
• Aproksimacija protoka – na pumpi:– Na ventilu:
0ˆ111ˆ
ˆˆ
1
Re
1
1
=⎥⎦⎤
⎢⎣⎡ ++
Δ=
+=
pRKC
p
pp
KRRKq
43421
&
qiq
pqq Roo ˆ1 Δ+=
pqq Kii ˆ1 Δ−=
Primer
k1 q1p1
pa
pa
C1 k2 q2p2 pa
paC2qp
appkq
ppkq
−=
−=
222
2111
• U ustaljenom stanju važi
• Na pumpi
• Na osnovu redne veze dva ventila
• Kriva q=f(Δp) se crta preko karakteristike pumpe i pronalazi se radna tačka
21 qqqp ==appkq
ppkq
−=
−=
222
2111
appp −=Δ 1
22
21
21
kk
kkkeq+
+=
• Inkrementalni model je tada:– Model bez ulaza
(odziv na početno stanje)
1pkq eqp Δ=
( )
( ) ⎥⎦
⎤⎢⎣
⎡−−=
⎥⎦
⎤⎢⎣
⎡−−−=
22
2112
2
211
11
1
ˆ1ˆˆ11ˆ
ˆˆ1ˆ11ˆ
pR
ppRC
p
ppR
pKC
p
&
&
11/20/2008
1
Modeli elektro-mehaničkih sistema
Modeliranje i simulacija sistema
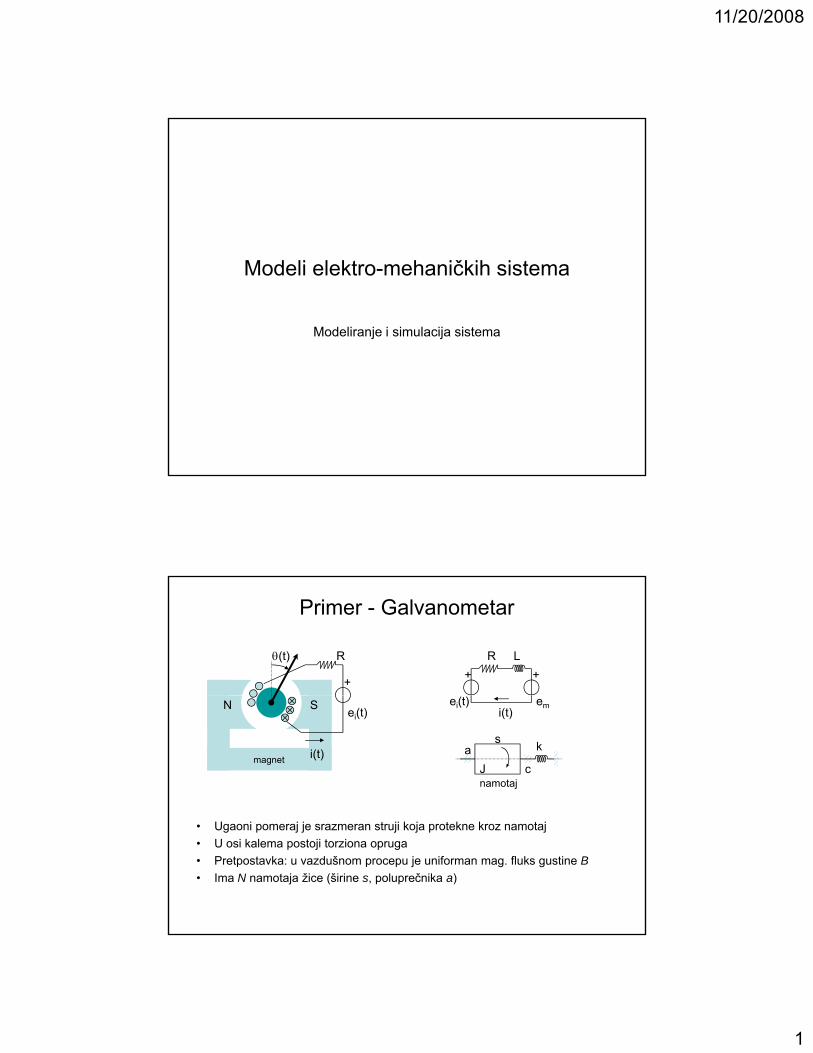
Primer - Galvanometar
+
θ(t) R++
LR
N S
magnet
ei(t)
i(t)
ei(t) emi(t)
k
cJnamotaj
as
• Ugaoni pomeraj je srazmeran struji koja protekne kroz namotaj• U osi kalema postoji torziona opruga• Pretpostavka: u vazdušnom procepu je uniforman mag. fluks gustine B• Ima N namotaja žice (širine s, poluprečnika a)
11/20/2008
2
Galvanometar (2)
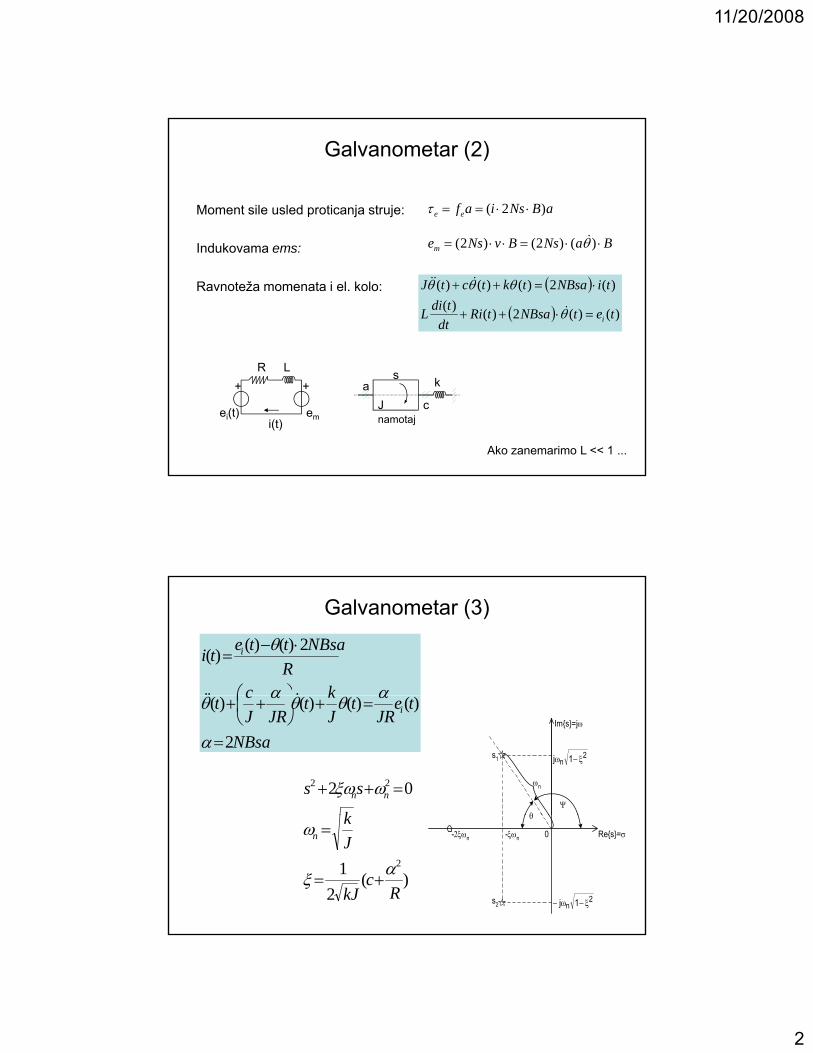
Moment sile usled proticanja struje: aBNsiafee )2( ⋅⋅==τ
&Indukovama ems:
Ravnoteža momenata i el. kolo:
BaNsBvNsem ⋅⋅=⋅⋅= )()2()2( θ
( )
( ) )()(2)()()(2)()()(
tetNBsatRidt
tdiL
tiNBsatktctJ
i=⋅++
⋅=++
θ
θθθ
&
&&&
++
ei(t) em
LR
i(t)
k
cJnamotaj
as
Ako zanemarimo L << 1 ...
Galvanometar (3)
kcR
NBsatteti i 2)()()(
⎟⎞
⎜⎛
⋅−=
αα
θ
&&&
NBsa
teJR
tJkt
JRJct i
2
)()()()(
=
=+⎟⎠⎞
⎜⎝⎛ ++
α
αθθαθ
02 22
k
ss nn ωξω =++
Im{s}=jω
s1
ωn
Ψθ
2n 1j ξ−ω
)(2
1 2
Rc
kJ
Jk
n
αξ
ω
+=
= -ξωn 0-2ξωn
s2
Re{s}=σ
θ
2n 1j ξ−ω−
11/20/2008
3
Primer - Mikrofon
NNk x(t)
++
eo(t) L
SSmagnet
c
L Ri(t)
N
fa(t)
m
+
em
R
i(t)
v
fa(t)fe
kx
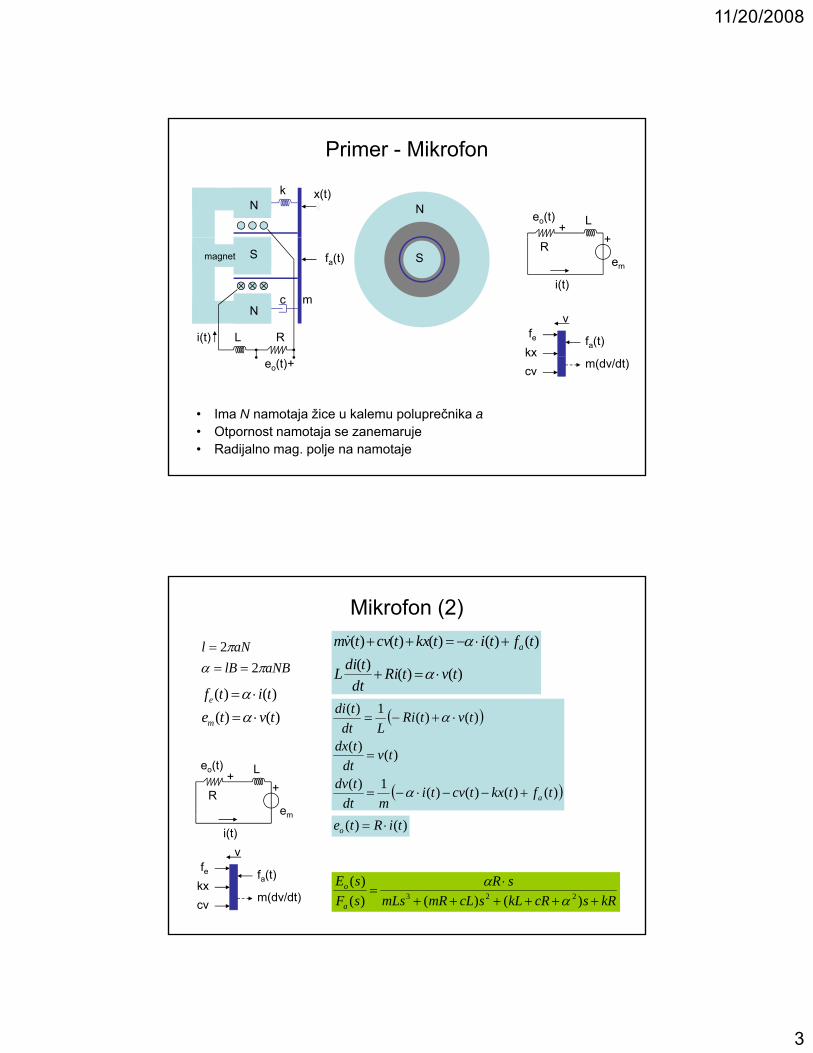
• Ima N namotaja žice u kalemu poluprečnika a• Otpornost namotaja se zanemaruje• Radijalno mag. polje na namotaje
+eo(t) m(dv/dt)cv
Mikrofon (2)
aNBlBaNl
παπ
22
===
)()()()()()()()(
tvtRidt
tdiL
tftitkxtcvtvm a
⋅=+
+⋅−=++
α
α&
)()( titf ⋅=α( )
( ))()()()(1)(
)()(
)()(1)(
tftkxtcvtimdt
tdv
tvdt
tdx
tvtRiLdt
tdi
a+−−⋅−=
=
⋅+−=
α
α)()()()(tvtetitf
m
e
⋅=⋅=
αα
++
eo(t)
em
L
R
)()( tiRteo ⋅=
kRscRkLscLmRmLssR
sFsE
a
o
++++++⋅
=)()()(
)(223 α
α
m
i(t)v
m(dv/dt)
fa(t)fe
kxcv
11/20/2008
4
Primer - Motor jednosmerne struje
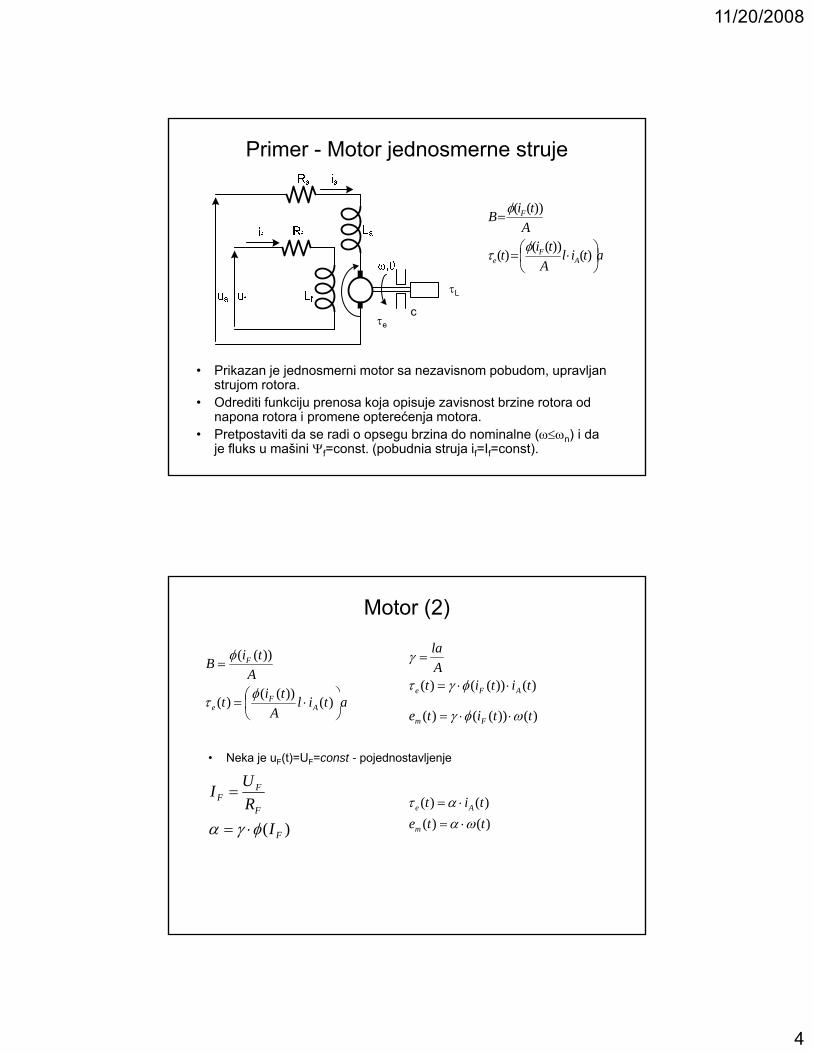
AtiB F=))((φ
τec
τL
atilA
tit AF
e ⎟⎠⎞
⎜⎝⎛ ⋅= )())(()( φτ
• Prikazan je jednosmerni motor sa nezavisnom pobudom, upravljan strujom rotora.
• Odrediti funkciju prenosa koja opisuje zavisnost brzine rotora od napona rotora i promene opterećenja motora.
• Pretpostaviti da se radi o opsegu brzina do nominalne (ω≤ωn) i da je fluks u mašini Ψf=const. (pobudnia struja if=If=const).
Motor (2)
tiA
tiB F
⎟⎞
⎜⎛
=
))((
))((
φ
φ
)())(()( tititAla
AFe ⋅⋅=
=
φγτ
γ
atilA
tit AF
e ⎟⎠⎞
⎜⎝⎛ ⋅= )())(()( φτ
F
FF R
UI =
)())(()( ttite Fm ωφγ ⋅⋅=
• Neka je uF(t)=UF=const - pojednostavljenje
)()( tit Ae ατ ⋅=
)( FIφγα ⋅= )()( ttem ωα ⋅=

11/20/2008
5
Motor (3)
( )
( ))()()(1)(
)()()(1)(
ttctitd
tuttiRLdt
tdiAAA
A
A
τωαω
ωα
−⋅−⋅=
+⋅−−=
( ))()()( ttctiJdt LA τωα=
)()()()()()()()(
sscsIsJssUssIRssIL
LA
AAAAA
ταα
−Ω⋅−⋅=Ω+Ω⋅−−=
)()()()()( 21 ssHsUsHs LA τ⋅+⋅=ΩA sPJL
sH1 )(1)( α
=
A
A
A
A
A
A
A
JLcRs
Jc
LRssP
sPJLR
JssH
sJ
22
2
)(
)(1)(
)(
α++⎟⎟
⎠
⎞⎜⎜⎝
⎛++=
⎟⎟⎠
⎞⎜⎜⎝
⎛−−=
11/20/2008
1
Elektromehaničke analogije
Modeliranje i simulacija sistema
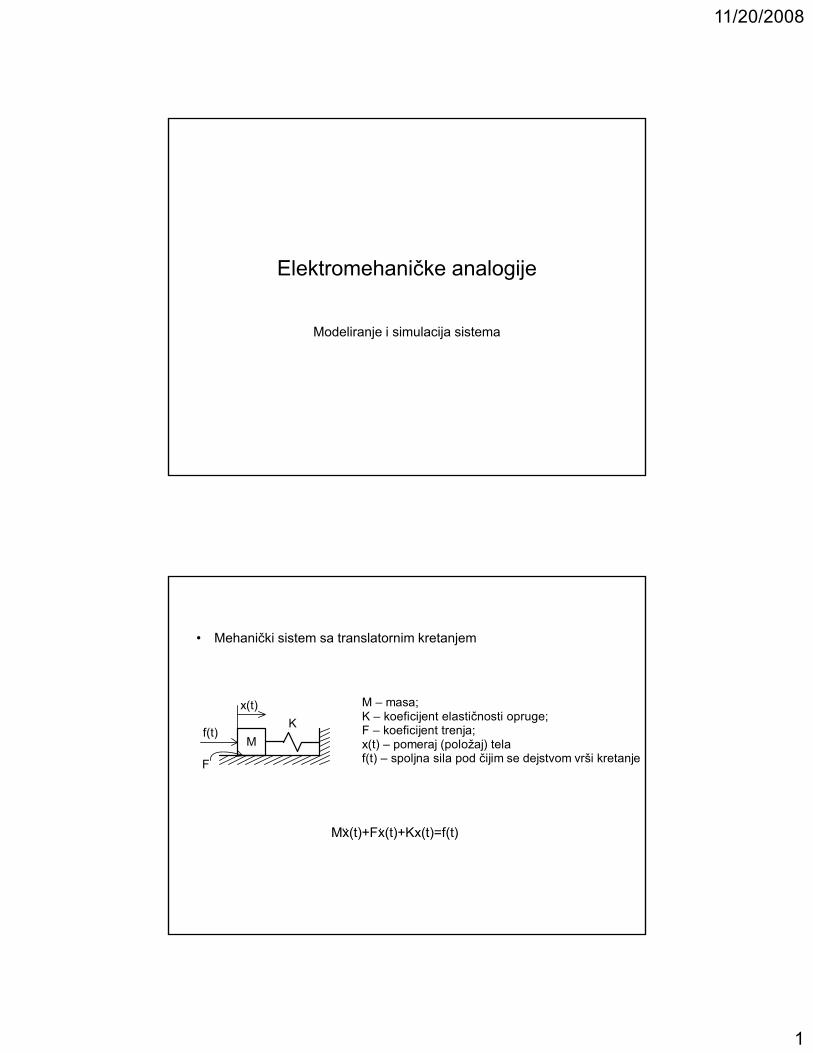
• Mehanički sistem sa translatornim kretanjem
MK
f(t)
x(t)
F
M – masa; K – koeficijent elastičnosti opruge; F – koeficijent trenja; x(t) – pomeraj (položaj) tela f(t) – spoljna sila pod čijim se dejstvom vrši kretanje
Mx⋅⋅(t)+Fx⋅ (t)+Kx(t)=f(t)
11/20/2008
2
Kθ(t) J – momenat inercije valjka;
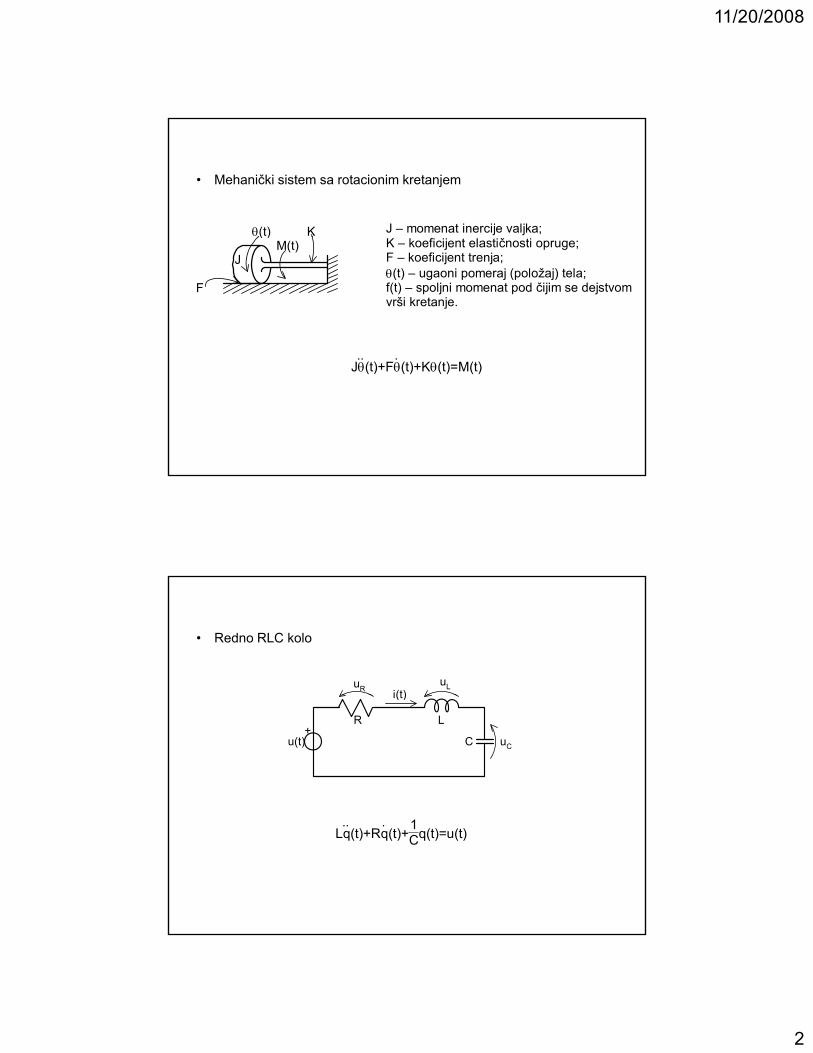
• Mehanički sistem sa rotacionim kretanjem
M(t)( )
F
J
K – koeficijent elastičnosti opruge; F – koeficijent trenja; θ(t) – ugaoni pomeraj (položaj) tela; f(t) – spoljni momenat pod čijim se dejstvom vrši kretanje.
Jθ⋅⋅(t)+Fθ
⋅ (t)+Kθ(t)=M(t)
i(t)uR
uL
• Redno RLC kolo
R+
i(t)
u(t)
L
C uC
Lq⋅⋅(t)+Rq⋅ (t)+1Cq(t)=u(t)
11/20/2008
3
Mx⋅⋅(t)+Fx⋅ (t)+Kx(t)=f(t)Lq⋅⋅(t)+Rq⋅ (t)+1
q(t)=u(t) Jθ⋅⋅(t)+Fθ
⋅(t)+Kθ(t) M(t)
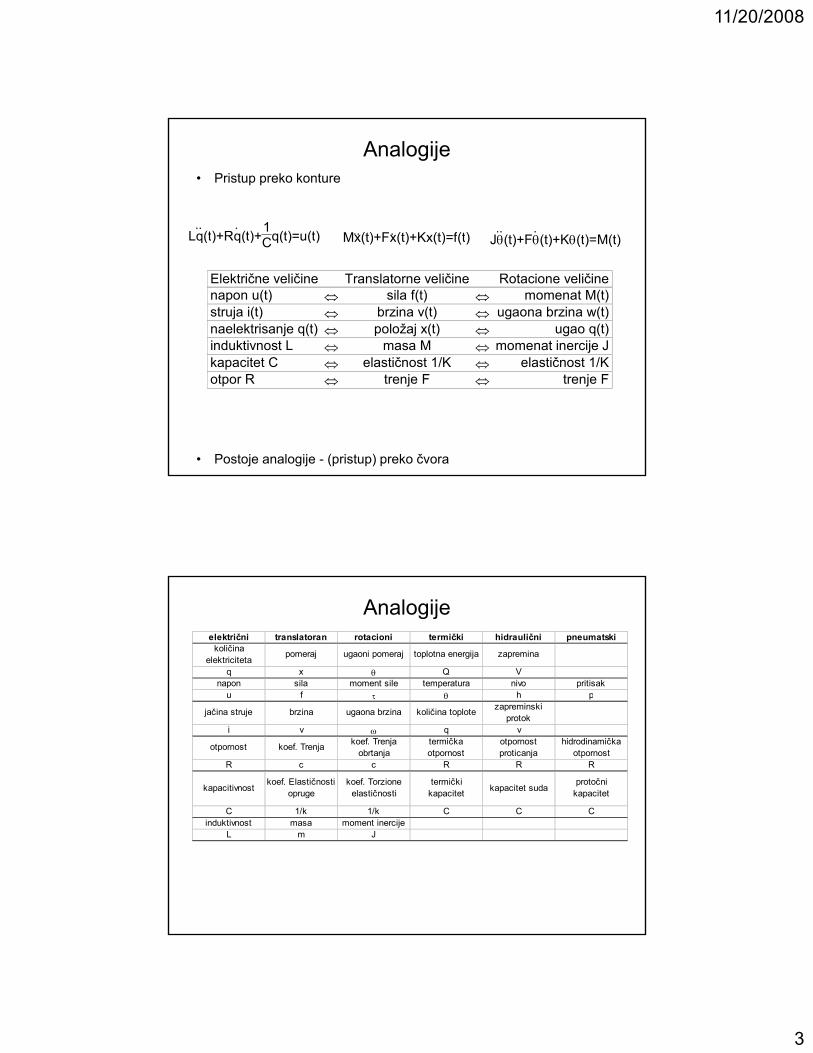
Analogije• Pristup preko konture
Električne veličine Translatorne veličine Rotacione veličine napon u(t) ⇔ sila f(t) ⇔ momenat M(t) struja i(t) ⇔ brzina v(t) ⇔ ugaona brzina w(t) naelektrisanje q(t) ⇔ položaj x(t) ⇔ ugao q(t) induktivnost L ⇔ masa M ⇔ momenat inercije J
Mx(t)+Fx(t)+Kx(t)=f(t)Lq(t)+Rq(t)+Cq(t)=u(t) Jθ(t)+Fθ(t)+Kθ(t)=M(t)
kapacitet C ⇔ elastičnost 1/K ⇔ elastičnost 1/K otpor R ⇔ trenje F ⇔ trenje F
• Postoje analogije - (pristup) preko čvora
Analogijeelektrični translatoran rotacioni termički hidraulični pneumatski
količina elektriciteta
pomeraj ugaoni pomeraj toplotna energija zapremina
q x θ Q Vnapon sila moment sile temperatura nivo pritisak
u f τ θ h pu f τ θ h p
jačina struje brzina ugaona brzina količina toplote zapreminski protok
i v ω q v
otpornost koef. Trenja koef. Trenja obrtanja
termička otpornost
otpornost proticanja
hidrodinamička otpornost
R c c R R R
kapacitivnostkoef. Elastičnosti
oprugekoef. Torzione
elastičnostitermički
kapacitet kapacitet sudaprotočni
kapacitet
C 1/k 1/k C C Cinduktivnost masa moment inercije
L m J