mecanica de sólidos - estática
DESCRIPTION
Meanica de solidosTRANSCRIPT
1
CURSO DE MECÁNICA DE SÓLIDOS
PARTE 1. ESTÁTICA
CAPÍTULO 1. INTRODUCCIÓN
LECCIÓN 1. DEFINICIONES Y CONCEPTOS BÁSICOS
1.1 ¿QUÉ ES LA MECÁNICA?
La mecánica es la ciencia que describe y predice las condiciones de reposo o de movimiento de los cuerpos bajo la
acción de las fuerzas. Está divida en dos partes: mecánica de los sólidos y la mecánica de los fluidos.
La mecánica de los sólidos se divide a su vez en mecánica de cuerpos rígidos y en mecánica de cuerpos
deformables. La mecánica de los cuerpos rígidos abarca la estática y la dinámica las cuales tratan de cuerpos en
reposo y de cuerpos en movimiento, respectivamente. Esta parte de la mecánica considera que los sólidos son
perfectamente rígidos, esto es, que no se deforman bajo la acción de las fuerzas. En la práctica esto no es del todo
cierto pues los sólidos sí sufren deformación bajo carga; sin embargo, estas deformaciones son tan pequeñas que
no afectan las condiciones de movimiento del cuerpo. No obstante, en lo que refiere a la pérdida de resistencia de
los cuerpos estas deformaciones sí son importantes y su estudio se denomina resistencia de materiales ó mecánica
de los cuerpos deformables.
La segunda parte de la mecánica, la mecánica de los fluidos, se subdivide en el estudio de los fluidos incompresibles
(los líquidos) y de los fluidos compresibles (los gases). Una rama importante de la mecánica de los fluidos
incompresibles es la hidráulica. A la mecánica de los fluidos compresibles se le conoce también como
termodinámica.
Este curso de mecánica de sólidos abarcará el estudio de los cuerpos rígidos bajo condiciones de reposo o de
equilibrio -estática- y por consiguiente en el subsiguiente estudio de la resistencia de materiales se asumirá que el
sólido se encuentra bajo estas mismas condiciones de equilibrio.
El concepto fundamental de la mecánica es el concepto de fuerza. Una fuerza representa la acción de un cuerpo
sobre otro y puede ser ejercida por contacto directo o a distancia, como en el caso de las fuerzas gravitacionales.
Las fuerzas por ser magnitudes vectoriales, se representan como vectores, esto es que tienen magnitud, dirección
y sentido, y se operan como vectores.
1.2 SISTEMAS DE UNIDADES
En este curso se usarán dos sistemas de unidades: el Sistema Internacional (SI) y el Sistema Ingles de Unidades
(USCS).
El Sistema Internacional (SI) es el sistema fundamental de unidades utilizado en el trabajo científico. El SI utiliza
siete dimensiones primarias: masa, longitud, tiempo, temperatura, corriente eléctrica, intensidad luminosa y
cantidad de sustancia. La tabla 1.1 ofrece un listado de las unidades primarias del SI, que se utilizarán en este curso.
Tabla 1.1 Dimensiones y unidades primarias del SI
Magnitud física Unidad y símbolo
Masa kilogramo (kg)
Longitud metro (m)
Tiempo segundo (s)
Temperatura Kelvin (K)
La unidad para la fuerza en el SI es secundaria y se denomina newton (N). Se deriva de la segunda ley de Newton
(Fuerza = masa x aceleración) y por definición, una fuerza de 1 N acelerará una masa de 1 kg con una aceleración
de 1 m/s2, por consiguiente el newton en términos de las unidades primarias del SI corresponde a:
1 N = 1 kg x m (1.1)
s2
Un múltiplo del newton (N) es el kilonewton (kN): 1kN = 103 N
2
En el cálculo de la fuerza gravitacional ejercida por la Tierra, ó peso (W), a partir de la segunda ley de Newton se
tiene:
W = m g (1.2)
En esta expresión la aceleración corresponde al valor de la gravedad local g, la cual varia de un punto de la tierra a
otro. El valor de la gravedad estándar al nivel del mar y 45º de latitud es gs = 9,81 m/s2 (más exactamente gs =
9,80665 m/s2).
La magnitud que corresponde a la medida de la resistencia de los materiales se denominará esfuerzo y se definirá
como fuerza por unidad de área, (esfuerzo = fuerza/ área) y la unidad resultante en el SI será (N/m2) la cual se
denominará Pascal (Pa). Múltiplos del Pascal son el megapascal (MPa): 1MPa = 106 Pa; y el gigapascal (GPa):
1GPa = 109 Pa.
El otro sistema de unidades importante es el Sistema Ingles de Unidades empleado en los Estados Unidos (United
States Customary System) ó USCS. La tabla 1.2 recoge algunas unidades primarias utilizadas en el USCS
Tabla 1.2 Dimensiones y unidades primarias del USCS
Magnitud física Unidad y símbolo
Longitud pie (p) ó pulgada (pulg); 1p = 12 pulg
Tiempo segundo (s)
Temperatura Rankine (R)
Fuerza libra (lb)
La unidad denominada libra se utiliza para designar tanto a una unidad de fuerza, que se denota como lbf (libra-
fuerza), como a una unidad de masa, que se denota como lbm (libra-masa). Por definición y en atención a la
segunda ley de Newton, una fuerza gravitatoria de 1 lbf acelerará una masa de 1 lbm hacia la tierra con una
aceleración estándar gs = 32,2 p/s2 (más exactamente gs = 32,1740 p/s2). Esto es:
1 lbf = 32,2 lbm x p (1.3)
s2
Obteniéndose como factor de conversión:
1 = 32,2 lbm x p (1.4)
lbf x s2
Por tanto, si se tiene el peso (W) en lbf y se pide encontrar la masa (m) en lbm, a partir de la de la expresión (1.2)
se tiene:
m = W x 32,2 lbm x p (1.5)
g lbf x s2
Siendo g el valor de la gravedad local. Si g = gs el valor de m en lbm es igual al valor de W en lbf.
Un múltiplo de la libra (lb) es la kilolibra (kip): 1kip = 103 libras
En el sistema USCS la unidad de esfuerzo será: libra/pulg2 la cual se abreviará por sus iniciales en inglés como
psi. Un múltiplo del psi es el kilo-psi (ksi): 1ksi = 103 psi.
Cuando se solucione un problema, en lo que refiere a Sistemas de Unidades, se deben respetar las dos siguientes
principios: 1) No se pueden mezclar unidades de un sistema con unidades del otro sistema y 2) no se pueden
convertir los valores dados en el enunciado de un problema a las correspondientes unidades del otro sistema.
3
CURSO DE MECÁNICA DE SÓLIDOS
PARTE 1. ESTÁTICA
CAPÍTULO 2. ESTÁTICA DE PARTÍCULAS
LECCIÓN 2. DESCOMPOSICIÓN DE UNA FUERZA EN COMPONENTES RECTANGULARES
2.1 FUERZAS EN UN PLANO
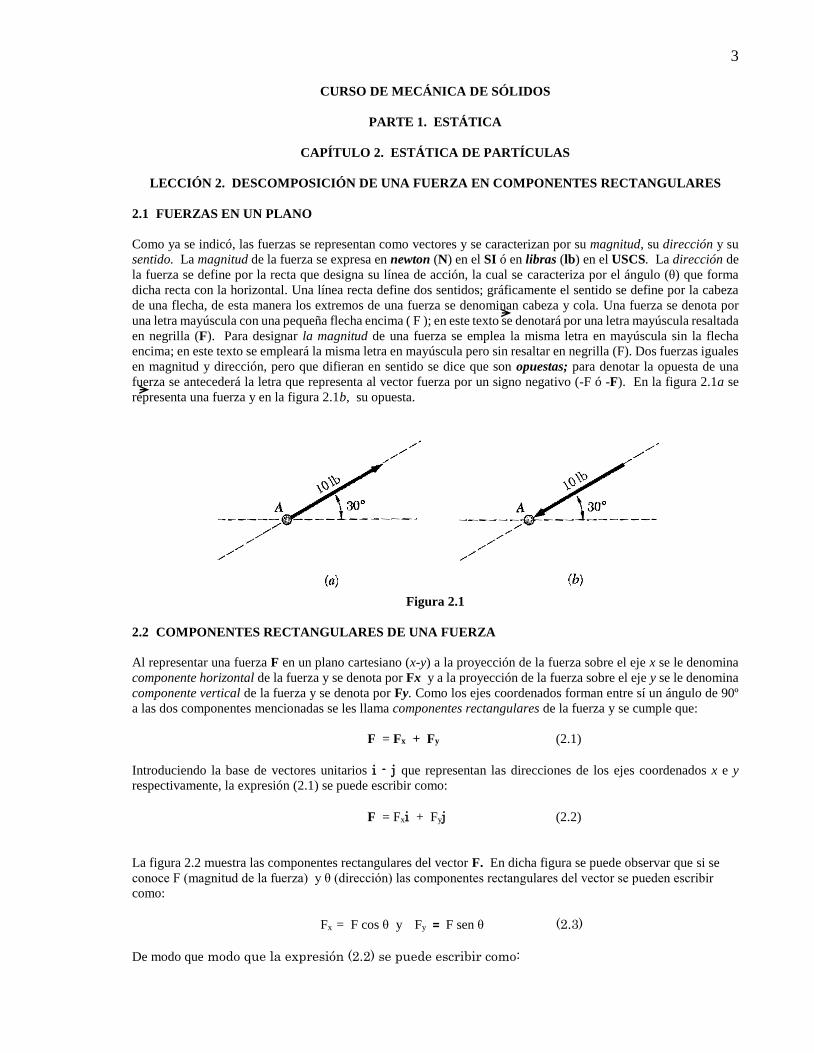
Como ya se indicó, las fuerzas se representan como vectores y se caracterizan por su magnitud, su dirección y su
sentido. La magnitud de la fuerza se expresa en newton (N) en el SI ó en libras (lb) en el USCS. La dirección de
la fuerza se define por la recta que designa su línea de acción, la cual se caracteriza por el ángulo (θ) que forma
dicha recta con la horizontal. Una línea recta define dos sentidos; gráficamente el sentido se define por la cabeza
de una flecha, de esta manera los extremos de una fuerza se denominan cabeza y cola. Una fuerza se denota por
una letra mayúscula con una pequeña flecha encima ( F ); en este texto se denotará por una letra mayúscula resaltada
en negrilla (F). Para designar la magnitud de una fuerza se emplea la misma letra en mayúscula sin la flecha
encima; en este texto se empleará la misma letra en mayúscula pero sin resaltar en negrilla (F). Dos fuerzas iguales
en magnitud y dirección, pero que difieran en sentido se dice que son opuestas; para denotar la opuesta de una
fuerza se antecederá la letra que representa al vector fuerza por un signo negativo (-F ó -F). En la figura 2.1a se
representa una fuerza y en la figura 2.1b, su opuesta.
Figura 2.1
2.2 COMPONENTES RECTANGULARES DE UNA FUERZA
Al representar una fuerza F en un plano cartesiano (x-y) a la proyección de la fuerza sobre el eje x se le denomina
componente horizontal de la fuerza y se denota por Fx y a la proyección de la fuerza sobre el eje y se le denomina
componente vertical de la fuerza y se denota por Fy. Como los ejes coordenados forman entre sí un ángulo de 90º
a las dos componentes mencionadas se les llama componentes rectangulares de la fuerza y se cumple que:
F = Fx + Fy (2.1)
Introduciendo la base de vectores unitarios i - j que representan las direcciones de los ejes coordenados x e y
respectivamente, la expresión (2.1) se puede escribir como:
F = Fxi + Fyj (2.2)
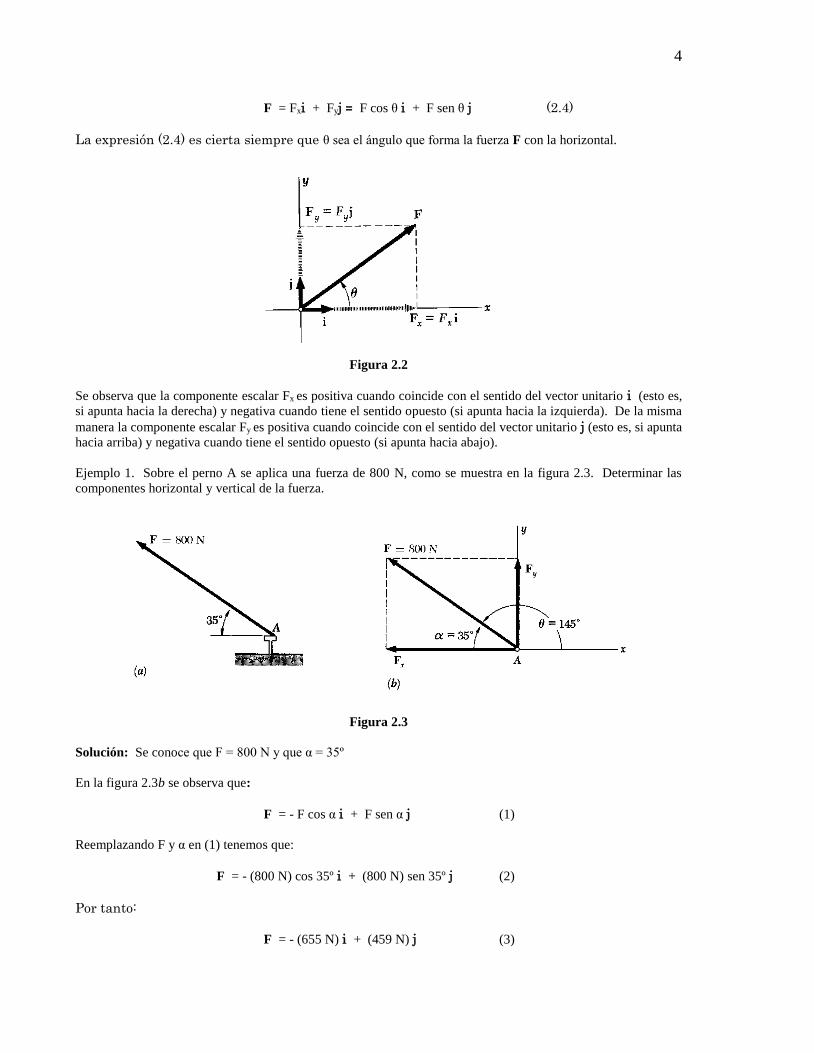
La figura 2.2 muestra las componentes rectangulares del vector F. En dicha figura se puede observar que si se
conoce F (magnitud de la fuerza) y θ (dirección) las componentes rectangulares del vector se pueden escribir
como:
Fx = F cos θ y Fy = F sen θ (2.3)
De modo que modo que la expresión (2.2) se puede escribir como:
4
F = Fxi + Fyj = F cos θ i + F sen θ j (2.4)
La expresión (2.4) es cierta siempre que θ sea el ángulo que forma la fuerza F con la horizontal.
Figura 2.2
Se observa que la componente escalar Fx es positiva cuando coincide con el sentido del vector unitario i (esto es,
si apunta hacia la derecha) y negativa cuando tiene el sentido opuesto (si apunta hacia la izquierda). De la misma
manera la componente escalar Fy es positiva cuando coincide con el sentido del vector unitario j (esto es, si apunta
hacia arriba) y negativa cuando tiene el sentido opuesto (si apunta hacia abajo).
Ejemplo 1. Sobre el perno A se aplica una fuerza de 800 N, como se muestra en la figura 2.3. Determinar las
componentes horizontal y vertical de la fuerza.
Figura 2.3
Solución: Se conoce que F = 800 N y que α = 35º
En la figura 2.3b se observa que:
F = - F cos α i + F sen α j (1)
Reemplazando F y α en (1) tenemos que:
F = - (800 N) cos 35º i + (800 N) sen 35º j (2)
Por tanto:
F = - (655 N) i + (459 N) j (3)
5
CURSO DE MECÁNICA DE SÓLIDOS
PARTE 1. ESTÁTICA
CAPÍTULO 2. ESTÁTICA DE PARTÍCULAS
LECCIÓN 3. FUERZA RESULTANTE
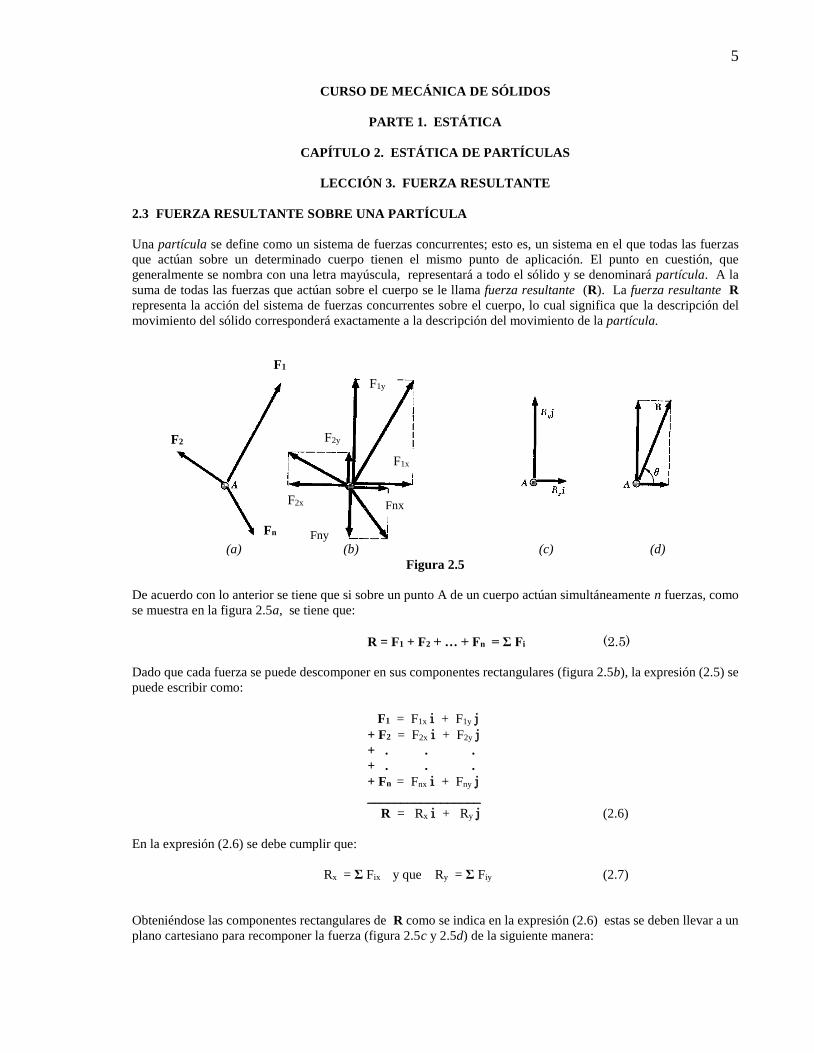
2.3 FUERZA RESULTANTE SOBRE UNA PARTÍCULA
Una partícula se define como un sistema de fuerzas concurrentes; esto es, un sistema en el que todas las fuerzas
que actúan sobre un determinado cuerpo tienen el mismo punto de aplicación. El punto en cuestión, que
generalmente se nombra con una letra mayúscula, representará a todo el sólido y se denominará partícula. A la
suma de todas las fuerzas que actúan sobre el cuerpo se le llama fuerza resultante (R). La fuerza resultante R
representa la acción del sistema de fuerzas concurrentes sobre el cuerpo, lo cual significa que la descripción del
movimiento del sólido corresponderá exactamente a la descripción del movimiento de la partícula.
(a) (b) (c) (d)
Figura 2.5
De acuerdo con lo anterior se tiene que si sobre un punto A de un cuerpo actúan simultáneamente n fuerzas, como
se muestra en la figura 2.5a, se tiene que:
R = F1 + F2 + … + Fn = Σ Fi (2.5)
Dado que cada fuerza se puede descomponer en sus componentes rectangulares (figura 2.5b), la expresión (2.5) se
puede escribir como:
F1 = F1x i + F1y j
+ F2 = F2x i + F2y j
+ . . .
+ . . .
+ Fn = Fnx i + Fny j
_________________ R = Rx i + Ry j (2.6)
En la expresión (2.6) se debe cumplir que:
Rx = Σ Fix y que Ry = Σ Fiy (2.7)
Obteniéndose las componentes rectangulares de R como se indica en la expresión (2.6) estas se deben llevar a un
plano cartesiano para recomponer la fuerza (figura 2.5c y 2.5d) de la siguiente manera:
F1y
F1
F2
Fn
F1x
Fny
Fnx F2x
F2y
6
La fuerza resultante queda completamente especificada con las expresiones (2.6), (2,8) y (2,9) y con el gráfico 2.5d
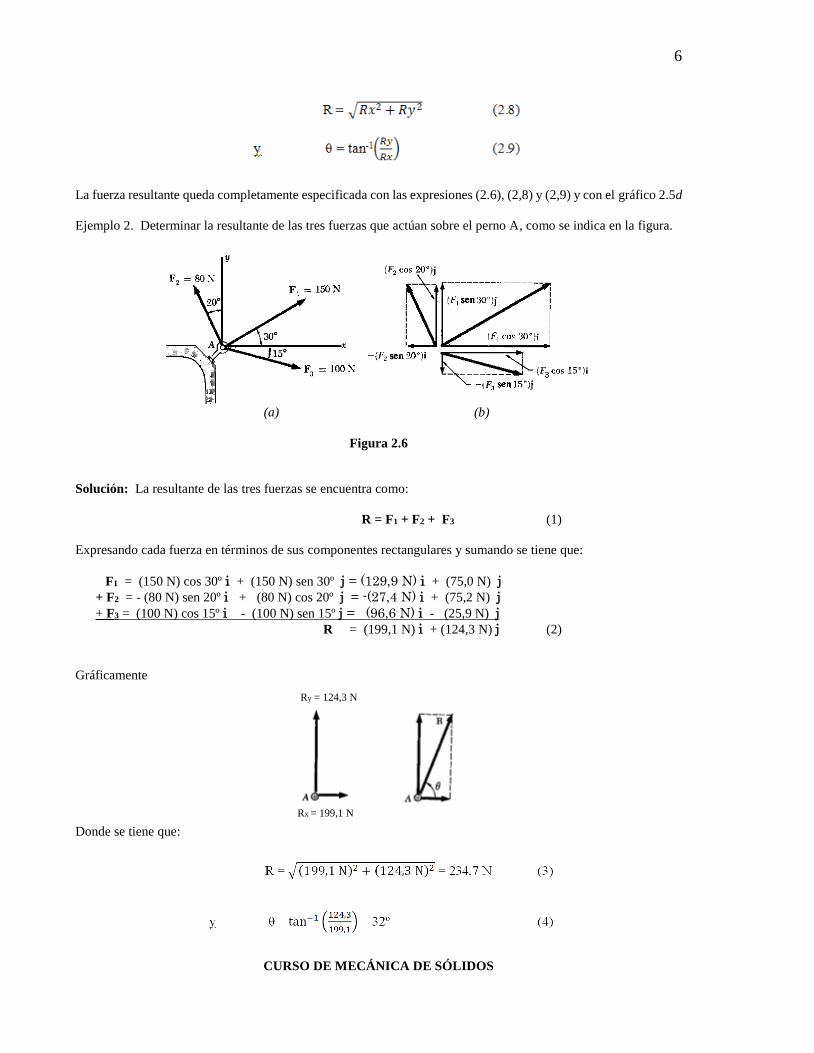
Ejemplo 2. Determinar la resultante de las tres fuerzas que actúan sobre el perno A, como se indica en la figura.
(a) (b)
Figura 2.6
Solución: La resultante de las tres fuerzas se encuentra como:
R = F1 + F2 + F3 (1)
Expresando cada fuerza en términos de sus componentes rectangulares y sumando se tiene que:
F1 = (150 N) cos 30º i + (150 N) sen 30º j = (129,9 N) i + (75,0 N) j
+ F2 = - (80 N) sen 20º i + (80 N) cos 20º j = -(27,4 N) i + (75,2 N) j
+ F3 = (100 N) cos 15º i - (100 N) sen 15º j = (96,6 N) i - (25,9 N) j
R = (199,1 N) i + (124,3 N) j (2)
Gráficamente
Donde se tiene que:
CURSO DE MECÁNICA DE SÓLIDOS
Rx = 199,1 N
Ry = 124,3 N
7
PARTE 1. ESTÁTICA
CAPÍTULO 2. ESTÁTICA DE PARTÍCULAS
LECCIÓN 4. EQUILIBRIO DE LA PARTÍCULA
2.4 EQUILIBRIO DE UNA PARTÍCULA
Una partícula se encuentra en equilibrio cuando la fuerza resultante de todas las fuerzas que actúan sobre la
partícula es cero, por consiguiente se debe cumplir que:
R = F1 + F2 + … + Fn = Σ Fi = 0 (2.10)
En términos de las componentes rectangulares se puede escribir que:
R = Rx i + Ry j = (Σ Fix ) i + (Σ Fiy ) j = 0 (2.11)
De la expresión (2.11) se concluye que las condiciones necesarias y suficientes para que la partícula este en
equilibrio son:
Rx = Σ Fix = 0 y Ry = Σ Fiy = 0 (2.12)
De acuerdo con la segunda ley de Newton, el equilibrio de una partícula supone que la partícula permanece en
reposo (si inicialmente estaba en reposo) o se mueve en línea recta con velocidad constante (si inicialmente estaba
en movimiento).
Un problema de equilibrio de una partícula generalmente consiste en encontrar la magnitud de hasta dos fuerzas
(incógnitas) de las cuales se conoce su dirección, en este caso la expresión (2.12) constituye un sistema de
ecuaciones lineales 2x2, el cual debe ser resuelto para encontrar las incógnitas.
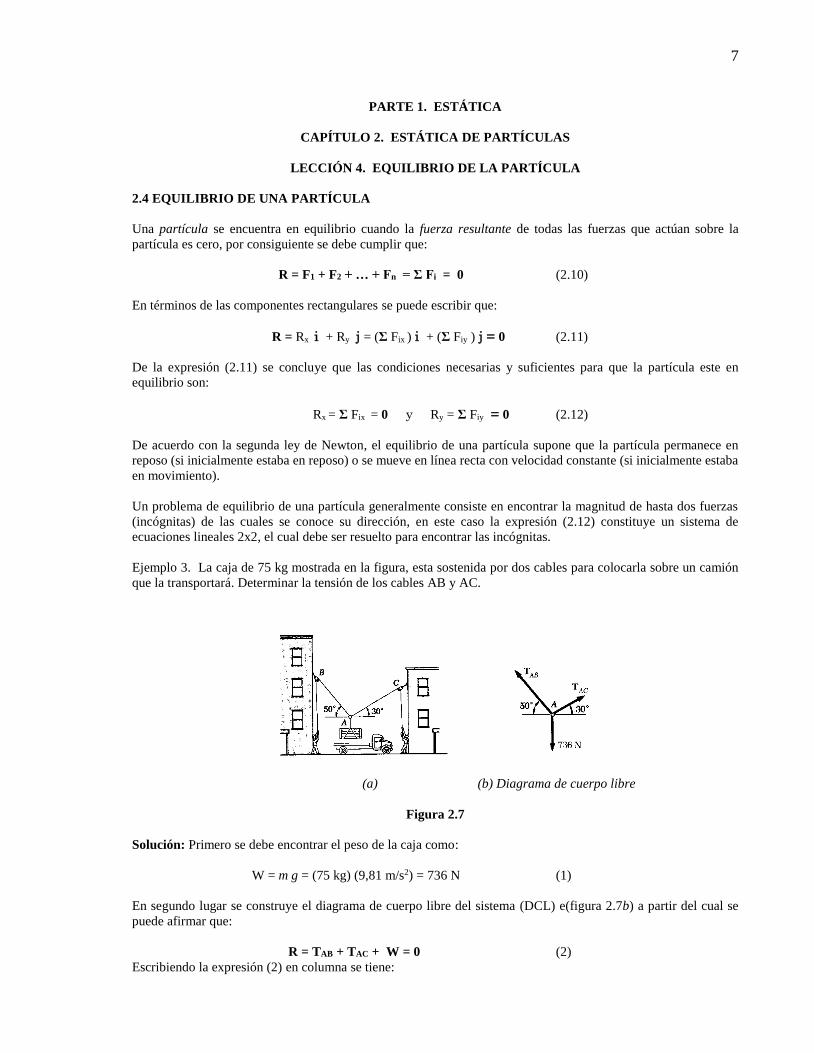
Ejemplo 3. La caja de 75 kg mostrada en la figura, esta sostenida por dos cables para colocarla sobre un camión
que la transportará. Determinar la tensión de los cables AB y AC.
(a) (b) Diagrama de cuerpo libre
Figura 2.7
Solución: Primero se debe encontrar el peso de la caja como:
W = m g = (75 kg) (9,81 m/s2) = 736 N (1)
En segundo lugar se construye el diagrama de cuerpo libre del sistema (DCL) e(figura 2.7b) a partir del cual se
puede afirmar que:
R = TAB + TAC + W = 0 (2)
Escribiendo la expresión (2) en columna se tiene:

8
TAB = - TAB cos 50º i + TAB sen 50º j = -(0,643)TAB i + (0,766)TAB j
+ TAC = TAC cos 30º i + TAC sen 30º j = (0,866)TAC i + (0,5) TAC j
+ W = 0 i - (736 N) j = 0 i - (736 N) j
R = 0 i + 0 j (3)
Sacando aparte las componentes escalares se tiene el siguiente sistema de ecuaciones lineales correspondiente a la
expresión (2.12):
Rx = Σ Fix = 0 : -(0,643)TAB + (0,866)TAC = 0 (4)
y Ry = Σ Fiy = 0 : (0,766)TAB + (0,5) TAC = 736 N (5)
Despejando TAc de (4) se obtiene:
TAC = 0,643 TAB = (0,742) TAB (6)
0,866
Reemplazando (6) en (5) y despejando TAB se tiene:
(0,766)TAB + (0,5)(0,742) TAB = 736 N
(1,137)TAB = 736 N
TAB = 736 N = 647,3 N (7)
1,137
Reemplazando (7) en (6) se obtiene TAC :
TAC = 0,742 TAB = 0,742 (647,3) = 480,3 N (8)
Por tanto se puede concluir que la tensión de los cables AB y AC son, respectivamente: TAB = 647,3 N y
TAC = 480,3 N.
9
CURSO DE MECÁNICA DE SÓLIDOS
PARTE 1. ESTÁTICA
CAPÍTULO 3. ESTÁTICA DE PARTÍCULAS
LECCIÓN 5. EQUILIBRIO DE LA PARTÍCULA EN EL ESPACIO
2.5 FUERZAS EN EL ESPACIO
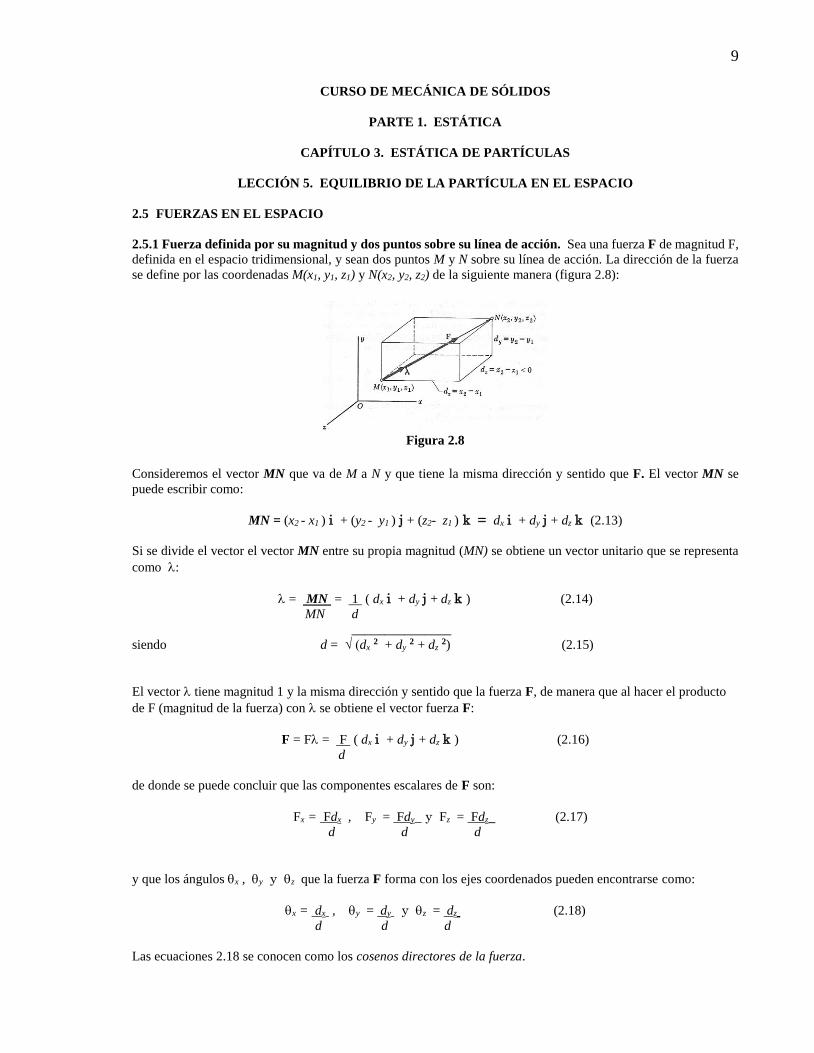
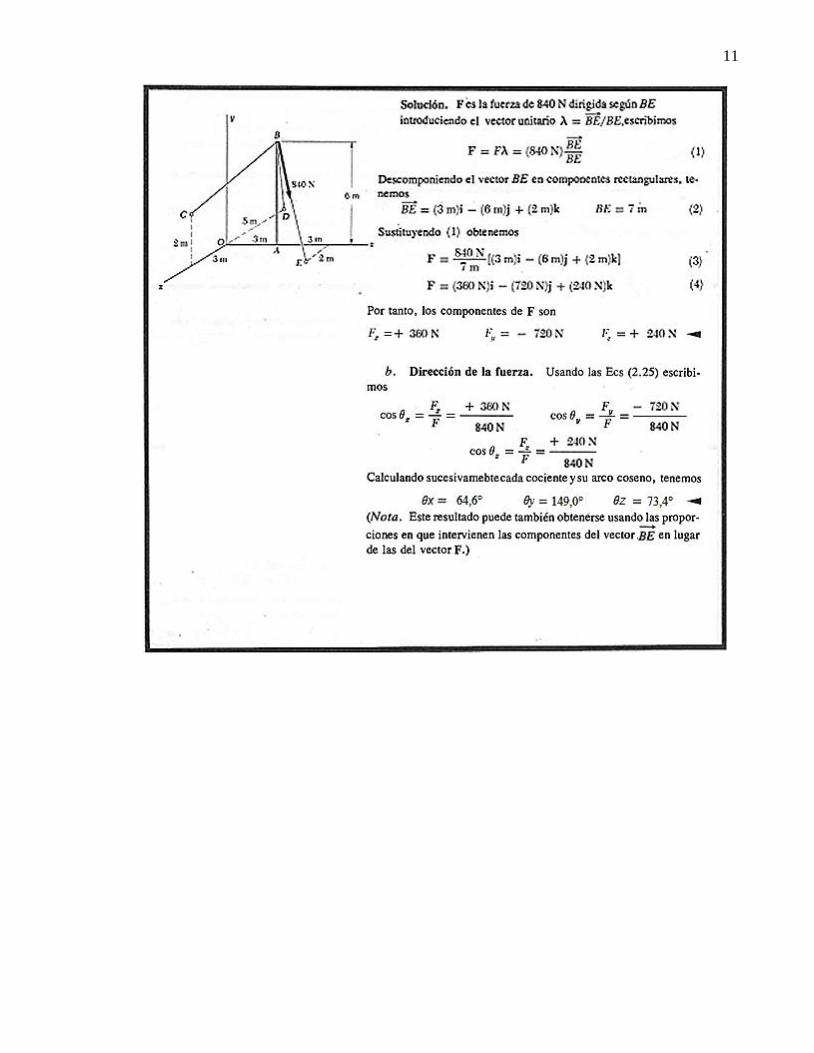
2.5.1 Fuerza definida por su magnitud y dos puntos sobre su línea de acción. Sea una fuerza F de magnitud F,
definida en el espacio tridimensional, y sean dos puntos M y N sobre su línea de acción. La dirección de la fuerza
se define por las coordenadas M(x1, y1, z1) y N(x2, y2, z2) de la siguiente manera (figura 2.8):
Figura 2.8
Consideremos el vector MN que va de M a N y que tiene la misma dirección y sentido que F. El vector MN se
puede escribir como:
MN = (x2 - x1 ) i + (y2 - y1 ) j + (z2- z1 ) k = dx i + dy j + dz k (2.13)
Si se divide el vector el vector MN entre su propia magnitud (MN) se obtiene un vector unitario que se representa
como :
= MN = 1 ( dx i + dy j + dz k ) (2.14)
MN d
_______________
siendo d = √ (dx 2 + dy 2 + dz 2) (2.15)
El vector tiene magnitud 1 y la misma dirección y sentido que la fuerza F, de manera que al hacer el producto
de F (magnitud de la fuerza) con se obtiene el vector fuerza F:
F = F = F ( dx i + dy j + dz k ) (2.16)
d
de donde se puede concluir que las componentes escalares de F son:
Fx = Fdx , Fy = Fdy y Fz = Fdz (2.17)
d d d
y que los ángulos x , y y z que la fuerza F forma con los ejes coordenados pueden encontrarse como:
x = dx , y = dy y z = dz (2.18) d d d
Las ecuaciones 2.18 se conocen como los cosenos directores de la fuerza.

10
2.5.2 Fuerza resultante sobre una partícula en el espacio. La resultante R de dos o más fuerzas concurrentes
en el espacio se determina sumando sus componentes rectangulares, de manera similar a como se hizo en la sesión
2.3:
R = F1 + F2 + … + Fn = Σ Fi (2.19)
Dado que cada fuerza se puede descomponer en sus componentes rectangulares, la expresión (2.19) se puede
escribir como:
F1 = F1x i + F1y j + F1z k
+ F2 = F2x i + F2y j + F1z k
+ . . . .
+ . . . .
+ Fn = Fnx i + Fny j + F1z k
_________________________ R = Rx i + Ry j + Rz k (2.20)
En la expresión (2.20) se debe cumplir que:
Rx = Σ Fix , Ry = Σ Fiy y que Rz = Σ Fiz (2.21)
La magnitud de la resultante R y los ángulos x , y y z que la fuerza forma con los eje coordenados, se pueden
encontrar como:
La fuerza resultante queda completamente especificada con las expresiones (2.20) y (2.22).
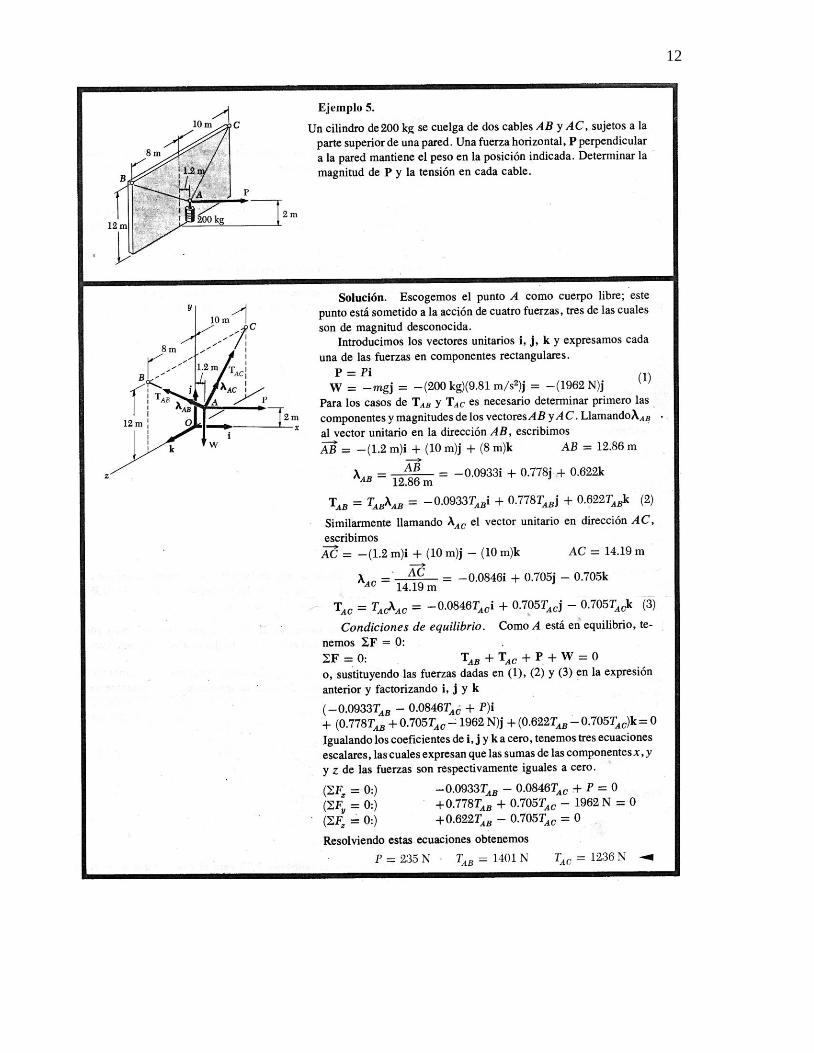
2.5.3 Equilibrio de la partícula en el espacio. De acuerdo con la definición dada en la sesión 2.4 una partícula
se encuentra en equilibrio cuando la fuerza resultante de todas las fuerzas que actúan sobre la partícula es cero, por
consiguiente se debe cumplir que:
Rx = Σ Fix = 0 , Ry = Σ Fiy = 0 y Rz = Σ Fiz = 0 (2.23)
Las ecuaciones (2.23) representan las condiciones necesarias y suficientes para garantizar el equilibrio de una
partícula en el espacio y pueden utilizarse en la solución de problemas relativos al equilibrio de una partícula que
no tenga más de tres incógnitas.
11
12
13
CURSO DE MECÁNICA DE SÓLIDOS
PARTE 1. ESTÁTICA
CAPÍTULO 3. EQUILIBRIO DE CUERPOS RÍGIDOS
LECCIÓN 6. MOMENTO DE UNA FUERZA
3.1 CUERPOS RÍGIDOS
En esta parte del curso los cuerpos se consideran rígidos, entendiéndose por cuerpo rígido aquel que no se deforma
cuando se le aplican cargas. Las fuerzas que actúan sobre los cuerpos rígidos son de 2 tipos: fuerzas externas
(aquellas que representan la acción de otros cuerpos sobre el cuerpo rígido) y fuerzas internas (aquellas que
mantienen unidas las partículas que forman el cuerpo). Las fuerzas externas pueden, si no hay oposición, imprimir
al cuerpo rígido un movimiento de traslación o de rotación, o ambos a la vez. La medida de la tendencia de una
fuerza externa a impartir un movimiento de rotación a un cuerpo rígido alrededor de un eje fijo perpendicular a la
fuerza se denomina momento de fuerza y se representa por el vector MO.
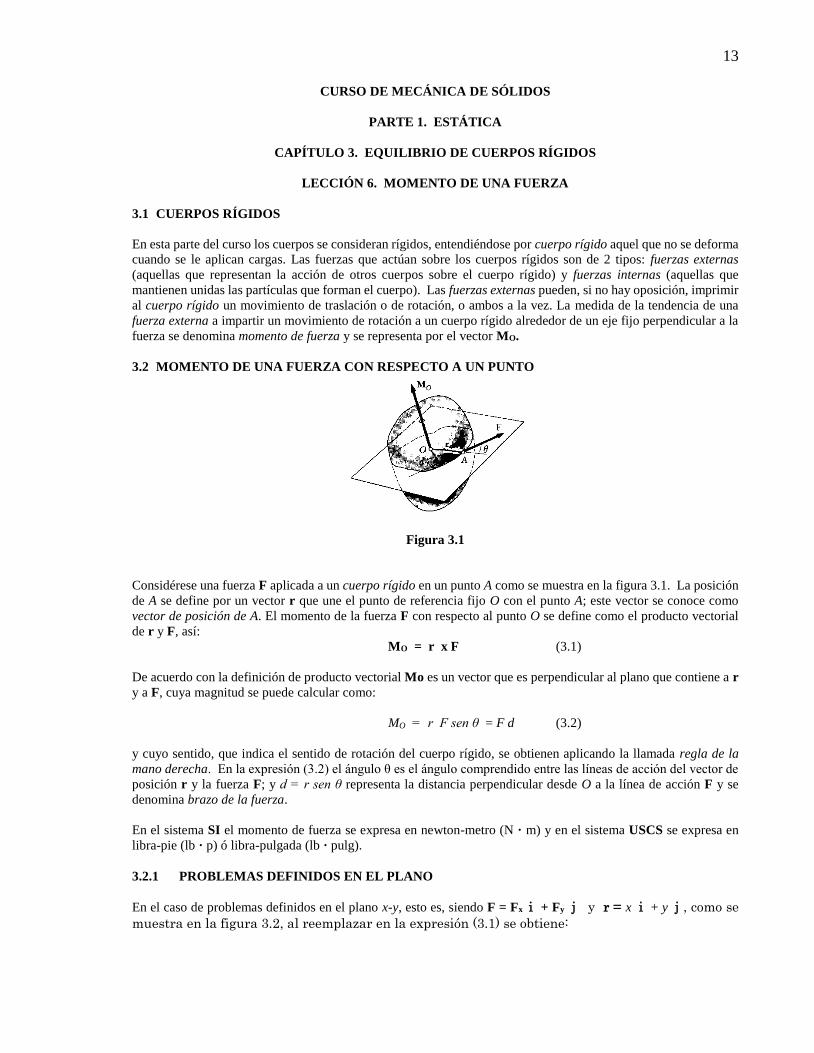
3.2 MOMENTO DE UNA FUERZA CON RESPECTO A UN PUNTO
Figura 3.1
Considérese una fuerza F aplicada a un cuerpo rígido en un punto A como se muestra en la figura 3.1. La posición
de A se define por un vector r que une el punto de referencia fijo O con el punto A; este vector se conoce como
vector de posición de A. El momento de la fuerza F con respecto al punto O se define como el producto vectorial
de r y F, así:
MO = r x F (3.1)
De acuerdo con la definición de producto vectorial Mo es un vector que es perpendicular al plano que contiene a r
y a F, cuya magnitud se puede calcular como:
MO = r F sen θ = F d (3.2)
y cuyo sentido, que indica el sentido de rotación del cuerpo rígido, se obtienen aplicando la llamada regla de la
mano derecha. En la expresión (3.2) el ángulo θ es el ángulo comprendido entre las líneas de acción del vector de
posición r y la fuerza F; y d = r sen θ representa la distancia perpendicular desde O a la línea de acción F y se
denomina brazo de la fuerza.
En el sistema SI el momento de fuerza se expresa en newton-metro (N · m) y en el sistema USCS se expresa en
libra-pie (lb · p) ó libra-pulgada (lb · pulg).
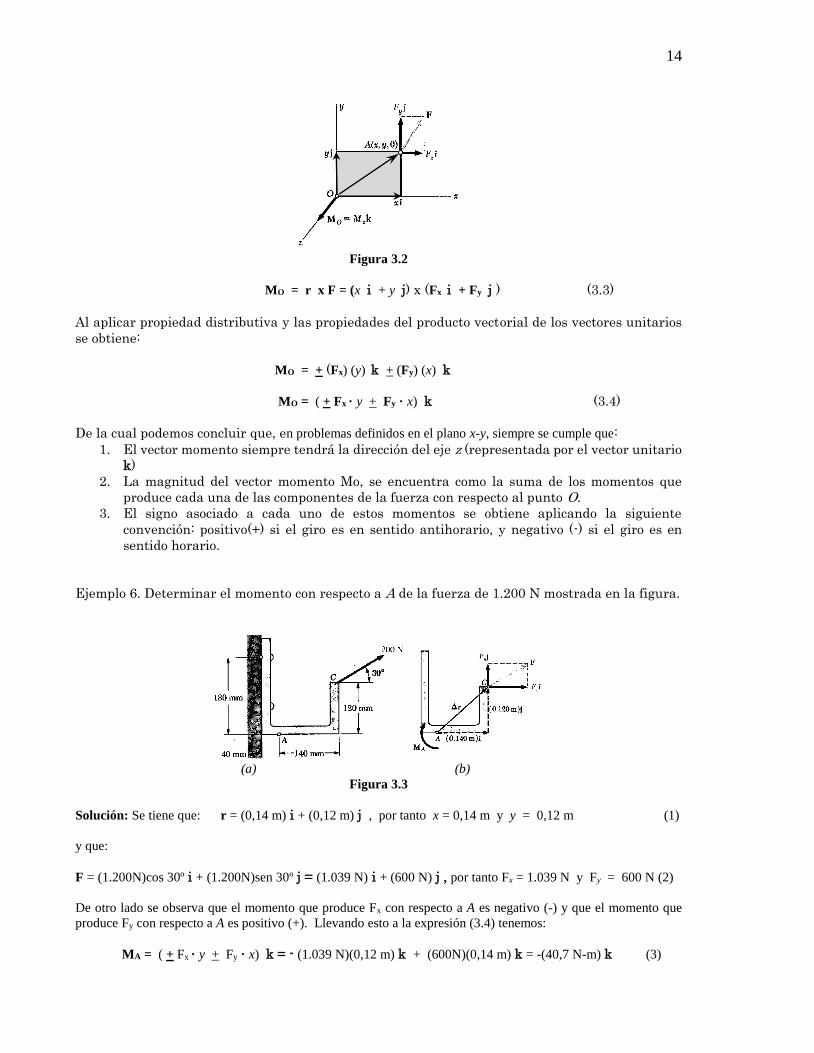
3.2.1 PROBLEMAS DEFINIDOS EN EL PLANO
En el caso de problemas definidos en el plano x-y, esto es, siendo F = Fx i + Fy j y r = x i + y j , como se
muestra en la figura 3.2, al reemplazar en la expresión (3.1) se obtiene:
14
Figura 3.2
MO = r x F = (x i + y j) x (Fx i + Fy j ) (3.3)
Al aplicar propiedad distributiva y las propiedades del producto vectorial de los vectores unitarios
se obtiene:
MO = + (Fx) (y) k + (Fy) (x) k
MO = ( + Fx · y + Fy · x) k (3.4)
De la cual podemos concluir que, en problemas definidos en el plano x-y, siempre se cumple que:
1. El vector momento siempre tendrá la dirección del eje z (representada por el vector unitario
k)
2. La magnitud del vector momento Mo, se encuentra como la suma de los momentos que
produce cada una de las componentes de la fuerza con respecto al punto O.
3. El signo asociado a cada uno de estos momentos se obtiene aplicando la siguiente
convención: positivo(+) si el giro es en sentido antihorario, y negativo (-) si el giro es en
sentido horario.
Ejemplo 6. Determinar el momento con respecto a A de la fuerza de 1.200 N mostrada en la figura.
(a) (b)
Figura 3.3
Solución: Se tiene que: r = (0,14 m) i + (0,12 m) j , por tanto x = 0,14 m y y = 0,12 m (1)
y que:
F = (1.200N)cos 30º i + (1.200N)sen 30º j = (1.039 N) i + (600 N) j , por tanto Fx = 1.039 N y Fy = 600 N (2)
De otro lado se observa que el momento que produce Fx con respecto a A es negativo (-) y que el momento que
produce Fy con respecto a A es positivo (+). Llevando esto a la expresión (3.4) tenemos:
MA = ( + Fx · y + Fy · x) k = - (1.039 N)(0,12 m) k + (600N)(0,14 m) k = -(40,7 N-m) k (3)
15
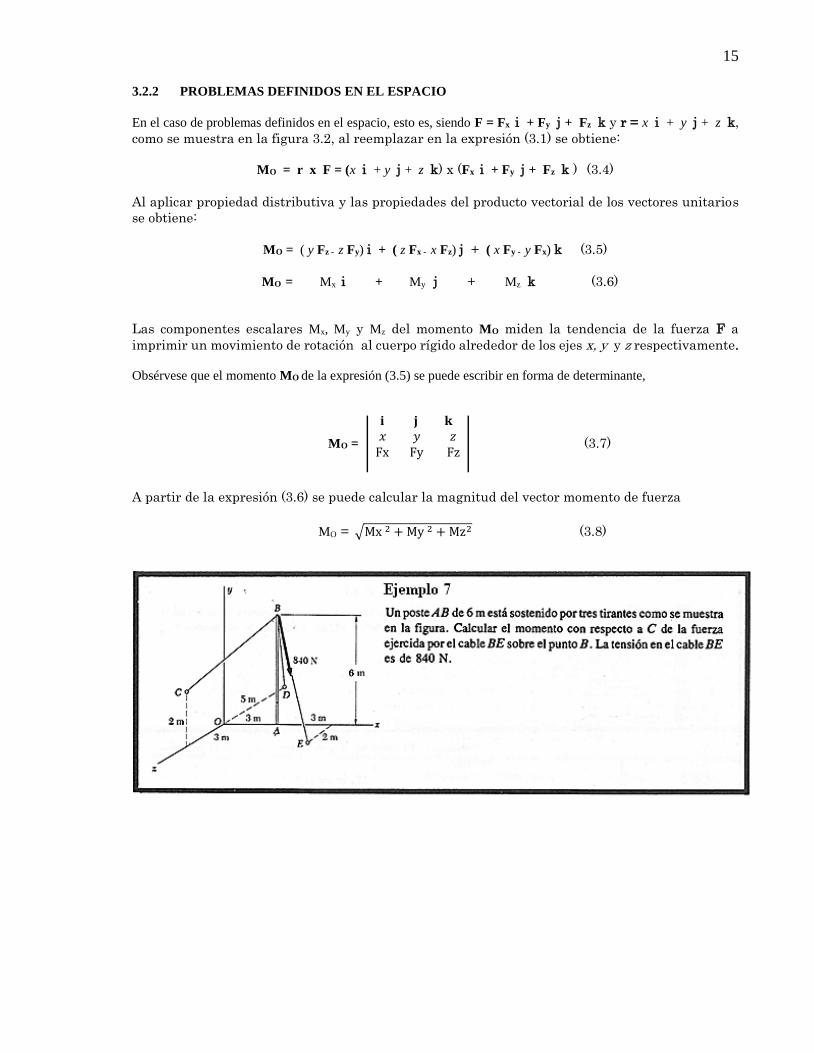
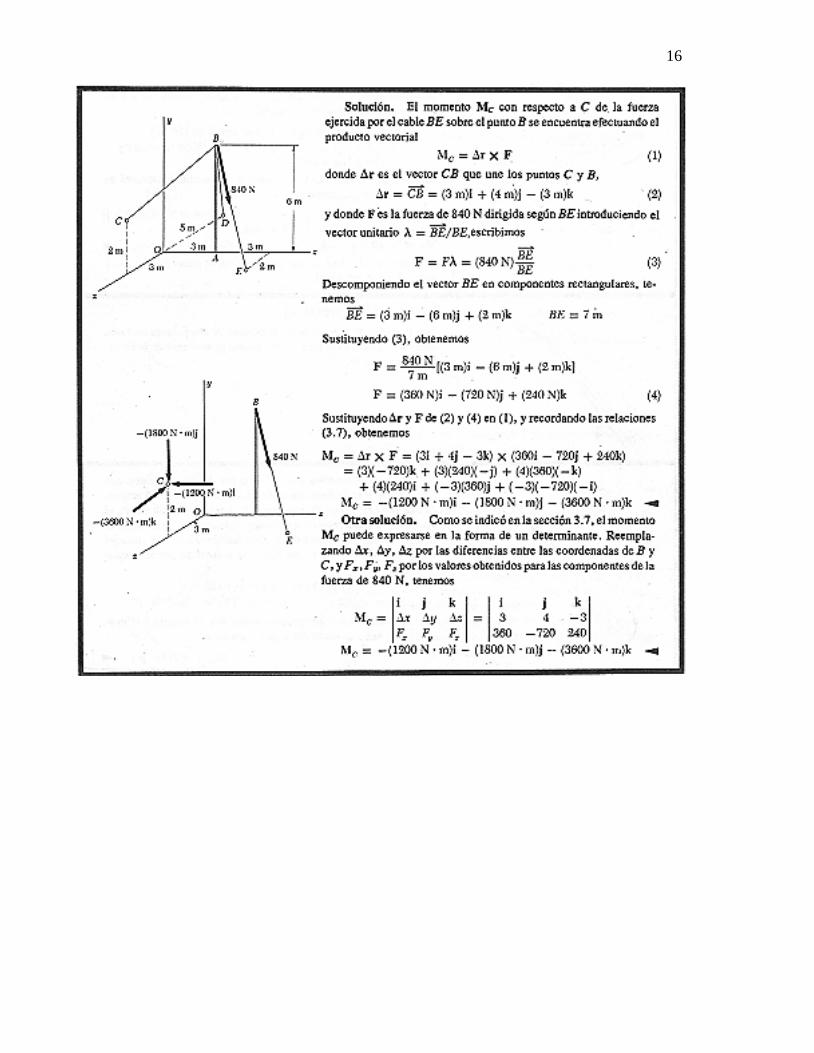
3.2.2 PROBLEMAS DEFINIDOS EN EL ESPACIO
En el caso de problemas definidos en el espacio, esto es, siendo F = Fx i + Fy j + Fz k y r = x i + y j + z k,
como se muestra en la figura 3.2, al reemplazar en la expresión (3.1) se obtiene:
MO = r x F = (x i + y j + z k) x (Fx i + Fy j + Fz k ) (3.4)
Al aplicar propiedad distributiva y las propiedades del producto vectorial de los vectores unitarios
se obtiene:
MO = ( y Fz - z Fy) i + ( z Fx - x Fz) j + ( x Fy - y Fx) k (3.5)
MO = Mx i + My j + Mz k (3.6)
Las componentes escalares Mx, My y Mz del momento MO miden la tendencia de la fuerza F a
imprimir un movimiento de rotación al cuerpo rígido alrededor de los ejes x, y y z respectivamente.
Obsérvese que el momento MO de la expresión (3.5) se puede escribir en forma de determinante,
MO = |
𝐢 𝐣 𝐤 𝑥 𝑦 𝑧
Fx Fy Fz
| (3.7)
A partir de la expresión (3.6) se puede calcular la magnitud del vector momento de fuerza
MO = √Mx 2 + My 2 + Mz2 (3.8)
16
17
CURSO DE MECÁNICA DE SÓLIDOS
PARTE 1. ESTÁTICA
CAPÍTULO 3. EQUILIBRIO DE CUERPOS RÍGIDOS
LECCIÓN 7. SISTEMAS EQUIVALENTES DE FUERZA
3.2 SISTEMAS EQUIVALENTES DE FUERZA
Dos sistemas de fuerza son equivalentes si determinan el mismo efecto de movimiento, en traslación y rotación,
sobre el cuerpo rígido. A continuación estudiaremos las siguientes equivalencias: a) un par de fuerzas es
equivalente a un momento de fuerza, b) un momento de fuerza es equivalente a un par de fuerzas, c) una fuerza es
equivalente a un sistema fuerza-par y d) un sistema fuerza-par es equivalente a una fuerza única.
3.2.1 UN PAR DE FUERZAS EQUIVALENTE A UN MOMENTO DE FUERZA
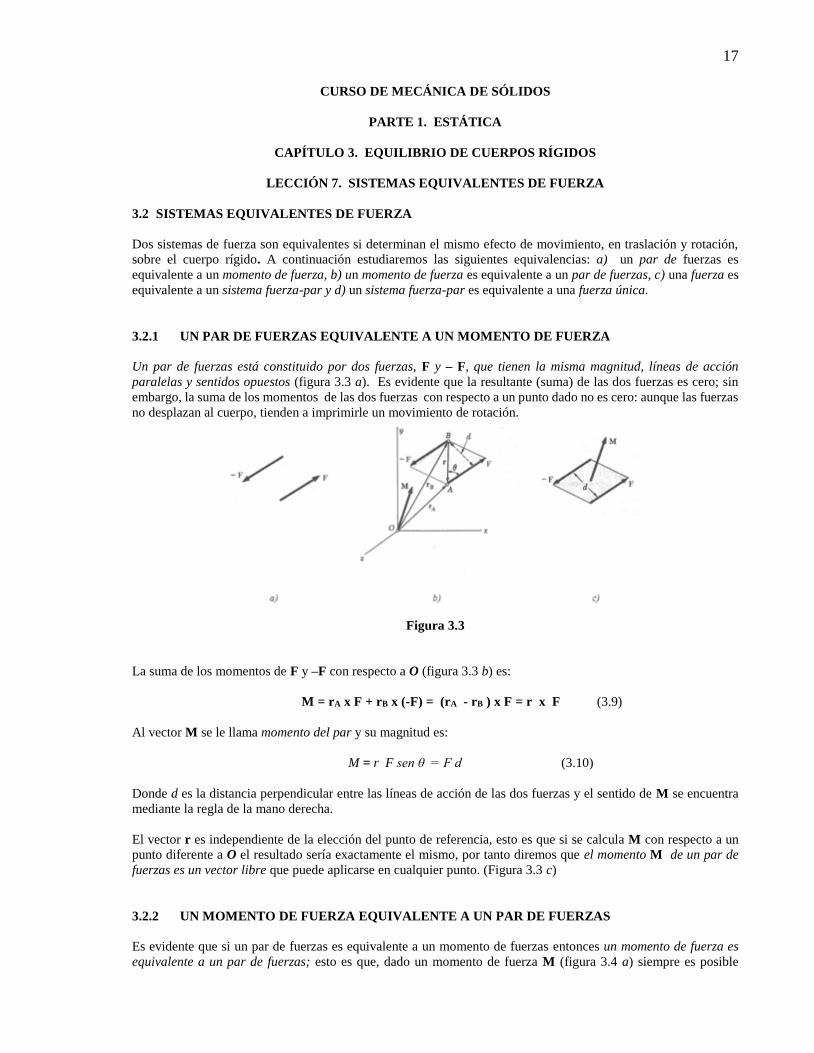
Un par de fuerzas está constituido por dos fuerzas, F y – F, que tienen la misma magnitud, líneas de acción
paralelas y sentidos opuestos (figura 3.3 a). Es evidente que la resultante (suma) de las dos fuerzas es cero; sin
embargo, la suma de los momentos de las dos fuerzas con respecto a un punto dado no es cero: aunque las fuerzas
no desplazan al cuerpo, tienden a imprimirle un movimiento de rotación.
Figura 3.3
La suma de los momentos de F y –F con respecto a O (figura 3.3 b) es:
M = rA x F + rB x (-F) = (rA - rB ) x F = r x F (3.9)
Al vector M se le llama momento del par y su magnitud es:
M = r F sen θ = F d (3.10)
Donde d es la distancia perpendicular entre las líneas de acción de las dos fuerzas y el sentido de M se encuentra
mediante la regla de la mano derecha.
El vector r es independiente de la elección del punto de referencia, esto es que si se calcula M con respecto a un
punto diferente a O el resultado sería exactamente el mismo, por tanto diremos que el momento M de un par de
fuerzas es un vector libre que puede aplicarse en cualquier punto. (Figura 3.3 c)
3.2.2 UN MOMENTO DE FUERZA EQUIVALENTE A UN PAR DE FUERZAS
Es evidente que si un par de fuerzas es equivalente a un momento de fuerzas entonces un momento de fuerza es
equivalente a un par de fuerzas; esto es que, dado un momento de fuerza M (figura 3.4 a) siempre es posible
18
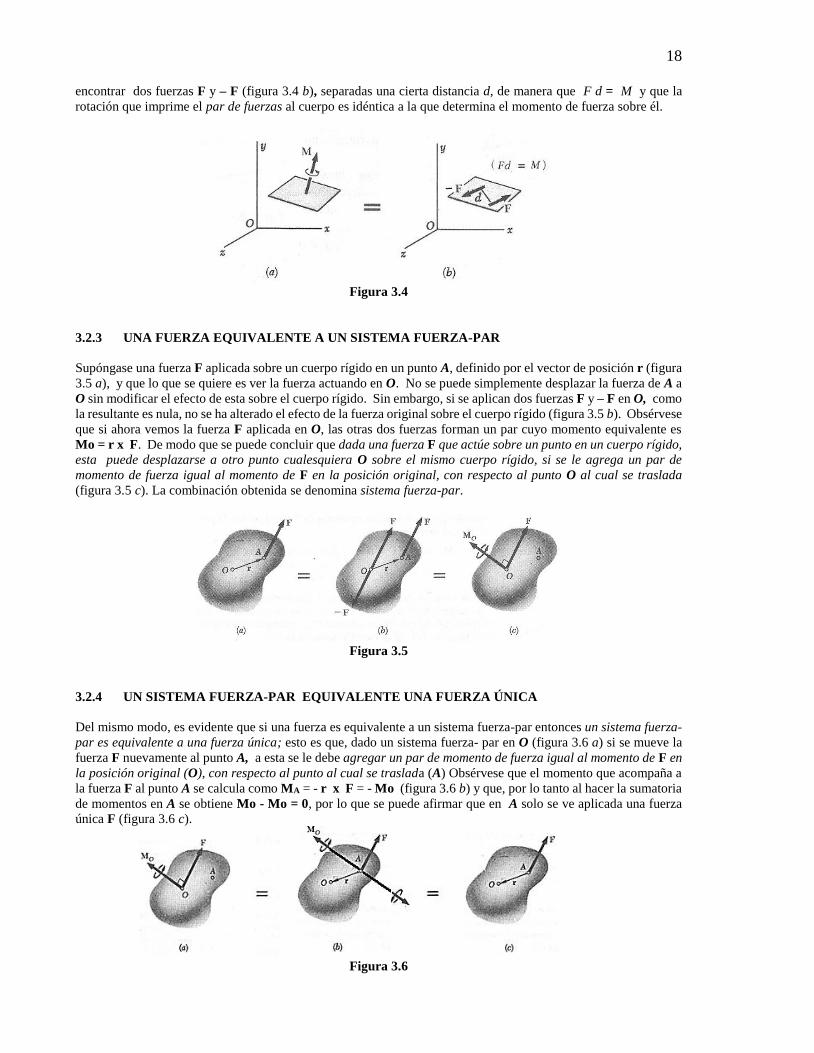
encontrar dos fuerzas F y – F (figura 3.4 b), separadas una cierta distancia d, de manera que F d = M y que la
rotación que imprime el par de fuerzas al cuerpo es idéntica a la que determina el momento de fuerza sobre él.
Figura 3.4
3.2.3 UNA FUERZA EQUIVALENTE A UN SISTEMA FUERZA-PAR
Supóngase una fuerza F aplicada sobre un cuerpo rígido en un punto A, definido por el vector de posición r (figura
3.5 a), y que lo que se quiere es ver la fuerza actuando en O. No se puede simplemente desplazar la fuerza de A a
O sin modificar el efecto de esta sobre el cuerpo rígido. Sin embargo, si se aplican dos fuerzas F y – F en O, como
la resultante es nula, no se ha alterado el efecto de la fuerza original sobre el cuerpo rígido (figura 3.5 b). Obsérvese
que si ahora vemos la fuerza F aplicada en O, las otras dos fuerzas forman un par cuyo momento equivalente es
Mo = r x F. De modo que se puede concluir que dada una fuerza F que actúe sobre un punto en un cuerpo rígido,
esta puede desplazarse a otro punto cualesquiera O sobre el mismo cuerpo rígido, si se le agrega un par de
momento de fuerza igual al momento de F en la posición original, con respecto al punto O al cual se traslada
(figura 3.5 c). La combinación obtenida se denomina sistema fuerza-par.
Figura 3.5
3.2.4 UN SISTEMA FUERZA-PAR EQUIVALENTE UNA FUERZA ÚNICA
Del mismo modo, es evidente que si una fuerza es equivalente a un sistema fuerza-par entonces un sistema fuerza-
par es equivalente a una fuerza única; esto es que, dado un sistema fuerza- par en O (figura 3.6 a) si se mueve la
fuerza F nuevamente al punto A, a esta se le debe agregar un par de momento de fuerza igual al momento de F en
la posición original (O), con respecto al punto al cual se traslada (A) Obsérvese que el momento que acompaña a
la fuerza F al punto A se calcula como MA = - r x F = - Mo (figura 3.6 b) y que, por lo tanto al hacer la sumatoria
de momentos en A se obtiene Mo - Mo = 0, por lo que se puede afirmar que en A solo se ve aplicada una fuerza
única F (figura 3.6 c).
Figura 3.6
19
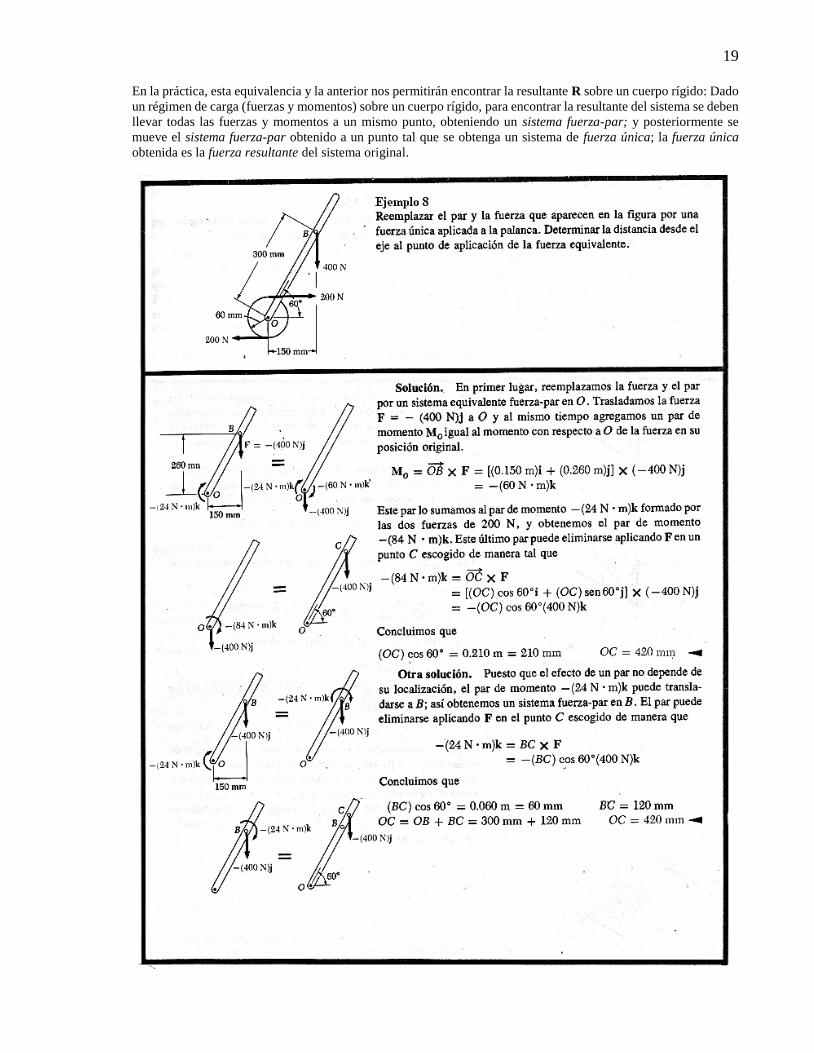
En la práctica, esta equivalencia y la anterior nos permitirán encontrar la resultante R sobre un cuerpo rígido: Dado
un régimen de carga (fuerzas y momentos) sobre un cuerpo rígido, para encontrar la resultante del sistema se deben
llevar todas las fuerzas y momentos a un mismo punto, obteniendo un sistema fuerza-par; y posteriormente se
mueve el sistema fuerza-par obtenido a un punto tal que se obtenga un sistema de fuerza única; la fuerza única
obtenida es la fuerza resultante del sistema original.
20
CURSO DE MECÁNICA DE SÓLIDOS
PARTE 1. ESTÁTICA
CAPÍTULO 3. EQUILIBRIO DE CUERPOS RÍGIDOS
LECCIÓN 8. CUERPO RÍGIDO EN EQUILIBRIO
3.3 EQUILIBRIO DEL CUERPO RÍGIDO EN EL PLANO
Un cuerpo rígido está en equilibrio cuando tanto la fuerza resultante como el momento de fuerza que actúan sobre
él son equivalentes a cero, por lo tanto las condiciones necesarias y suficientes para que un cuerpo rígido este en
equilibrio son:
R = Σ Fi = 0 y MO = Σ MO i = 0 (3.11)
En términos de las componentes escalares de las fuerzas y los momentos las expresiones (3.11) se pueden escribir
como las siguientes tres ecuaciones escalares:
Σ Fx i = 0 ; Σ Fy i = 0 (3.12)
y Σ Mz i = 0 (3.13)
Las ecuaciones (3.12) expresan el hecho de que las fuerzas están en equilibrio y la ecuación (3.13) expresa el hecho
de que los momentos están también en equilibrio, por lo que el sistema de fuerzas externas no impartirá movimiento
de traslación (equilibrio traslacional) ni de rotación (equilibrio rotacional) al cuerpo rígido.
Figura 3.7
21
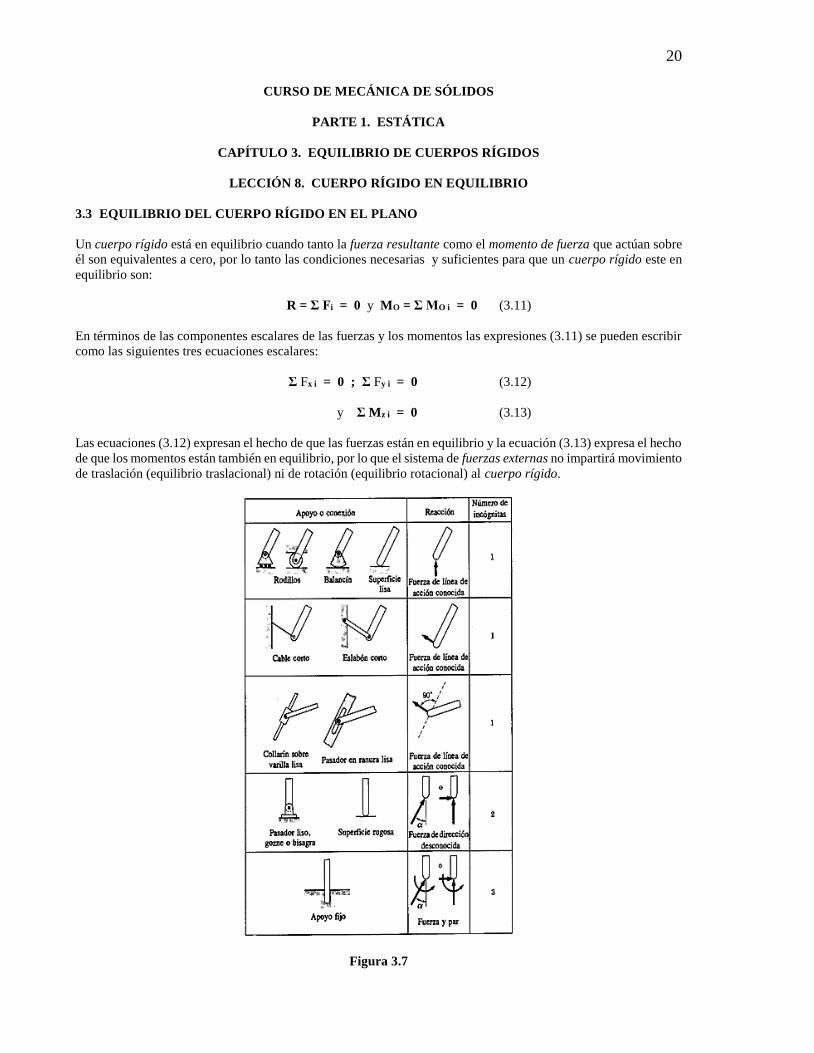
3.4 REACCIONES EN APOYOS Y CONEXIONES DE UNA ESTRUCTURA BIDIMENSIONAL
Físicamente para que un cuerpo rígido esté en equilibrio debe estar conectado a una base de sustentación y/o a
otros cuerpos. Al conjunto de la base de sustentación y de los otros cuerpos conectados al cuerpo rígido considerado
se le denomina apoyos y conexiones del cuerpo rígido. Cuando se dibuje el diagrama de cuerpo libre del cuerpo
rígido considerado además de las fuerzas externas dadas, que generalmente son conocidas, se deben dibujar las
fuerzas que representan a sus apoyos y conexiones, las cuales se denominan reacciones y generalmente son
desconocidas, esto es, constituyen incógnitas. La figura 3.7 muestra los apoyos y conexiones más comunes para
soportar una estructura bidimensional, así como las reacciones que producen.
Solucionar un problema de equilibrio de cuerpo rígido consiste en encontrar las reacciones en los apoyos y
conexiones del cuerpo rígido considerado a partir de su diagrama de cuerpo libre y de aplicar las ecuaciones de
equilibrio (3.12) y (3.13). Puesto que se cuenta sólo con tres ecuaciones de equilibrio, las reacciones en los apoyos
no pueden representar más de tres incógnitas; en caso de que esto ocurra se dice que el problema es estáticamente
indeterminado.
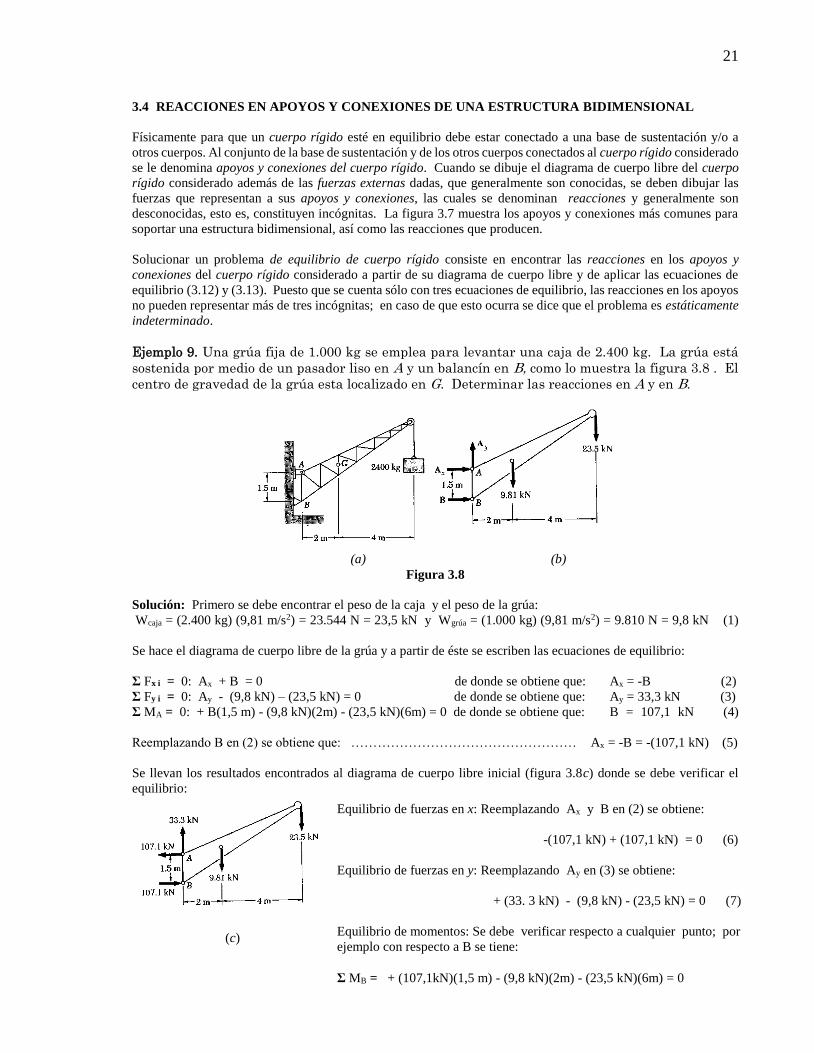
Ejemplo 9. Una grúa fija de 1.000 kg se emplea para levantar una caja de 2.400 kg. La grúa está
sostenida por medio de un pasador liso en A y un balancín en B, como lo muestra la figura 3.8 . El
centro de gravedad de la grúa esta localizado en G. Determinar las reacciones en A y en B.
(a) (b)
Figura 3.8
Solución: Primero se debe encontrar el peso de la caja y el peso de la grúa:
Wcaja = (2.400 kg) (9,81 m/s2) = 23.544 N = 23,5 kN y Wgrúa = (1.000 kg) (9,81 m/s2) = 9.810 N = 9,8 kN (1)
Se hace el diagrama de cuerpo libre de la grúa y a partir de éste se escriben las ecuaciones de equilibrio:
Σ Fx i = 0: Ax + B = 0 de donde se obtiene que: Ax = -B (2)
Σ Fy i = 0: Ay - (9,8 kN) – (23,5 kN) = 0 de donde se obtiene que: Ay = 33,3 kN (3)
Σ MA = 0: + B(1,5 m) - (9,8 kN)(2m) - (23,5 kN)(6m) = 0 de donde se obtiene que: B = 107,1 kN (4)
Reemplazando B en (2) se obtiene que: …………………………………………… Ax = -B = -(107,1 kN) (5)
Se llevan los resultados encontrados al diagrama de cuerpo libre inicial (figura 3.8c) donde se debe verificar el
equilibrio:
(c)
Equilibrio de fuerzas en x: Reemplazando Ax y B en (2) se obtiene:
-(107,1 kN) + (107,1 kN) = 0 (6)
Equilibrio de fuerzas en y: Reemplazando Ay en (3) se obtiene:
+ (33. 3 kN) - (9,8 kN) - (23,5 kN) = 0 (7)
Equilibrio de momentos: Se debe verificar respecto a cualquier punto; por
ejemplo con respecto a B se tiene:
Σ MB = + (107,1kN)(1,5 m) - (9,8 kN)(2m) - (23,5 kN)(6m) = 0
22
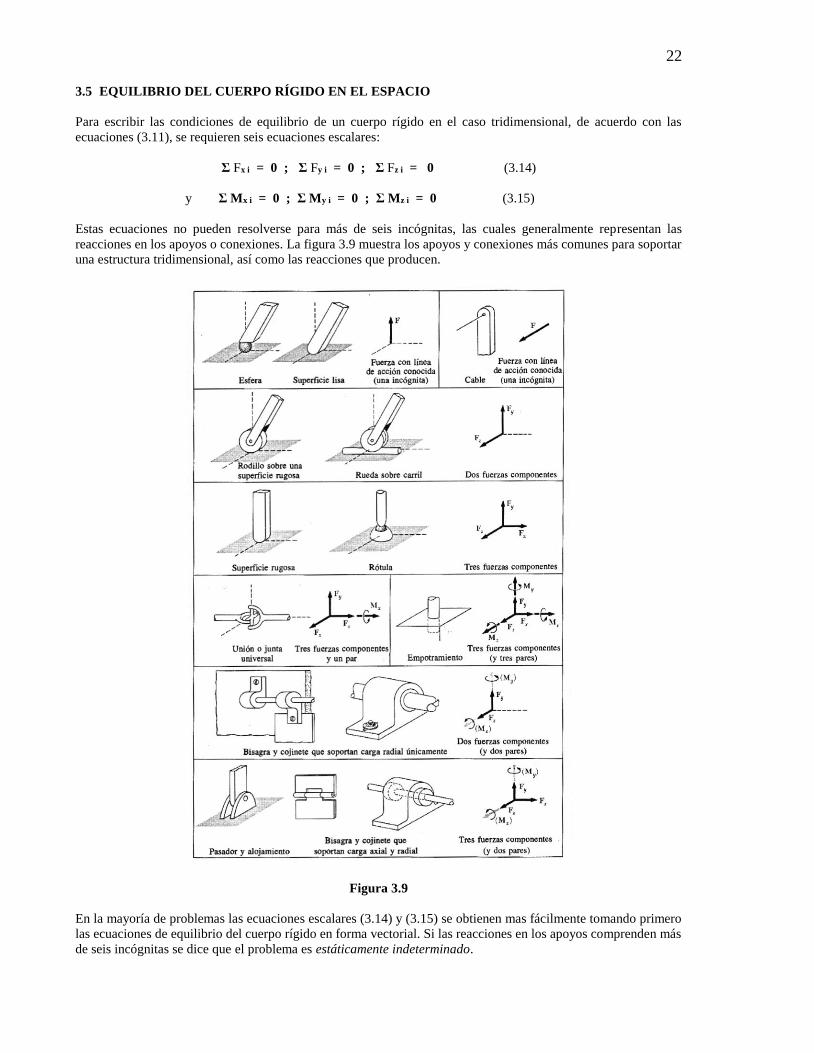
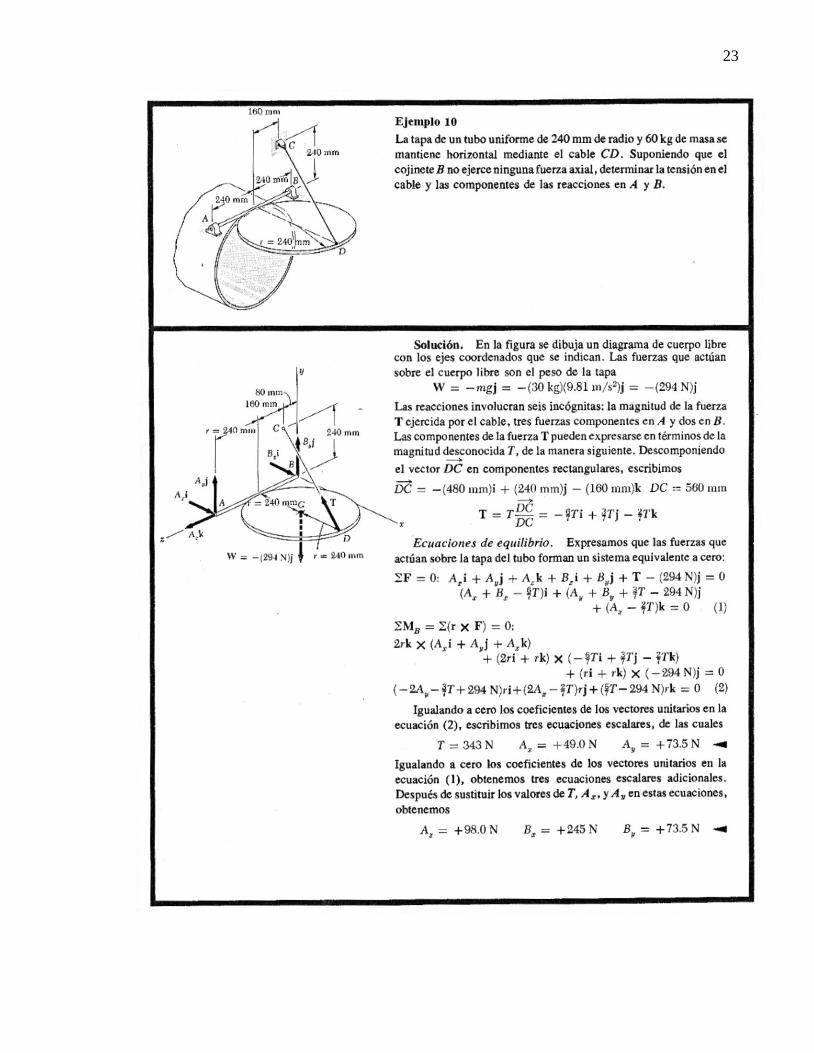
3.5 EQUILIBRIO DEL CUERPO RÍGIDO EN EL ESPACIO
Para escribir las condiciones de equilibrio de un cuerpo rígido en el caso tridimensional, de acuerdo con las
ecuaciones (3.11), se requieren seis ecuaciones escalares:
Σ Fx i = 0 ; Σ Fy i = 0 ; Σ Fz i = 0 (3.14)
y Σ Mx i = 0 ; Σ My i = 0 ; Σ Mz i = 0 (3.15)
Estas ecuaciones no pueden resolverse para más de seis incógnitas, las cuales generalmente representan las
reacciones en los apoyos o conexiones. La figura 3.9 muestra los apoyos y conexiones más comunes para soportar
una estructura tridimensional, así como las reacciones que producen.
Figura 3.9
En la mayoría de problemas las ecuaciones escalares (3.14) y (3.15) se obtienen mas fácilmente tomando primero
las ecuaciones de equilibrio del cuerpo rígido en forma vectorial. Si las reacciones en los apoyos comprenden más
de seis incógnitas se dice que el problema es estáticamente indeterminado.
23
24
CURSO DE MECÁNICA DE SÓLIDOS
PARTE 1. ESTÁTICA
CAPÍTULO 4. FUERZAS DISTRIBUIDAS
LECCIÓN 9. FUERZAS DISTRIBUIDAS SOBRE VIGAS
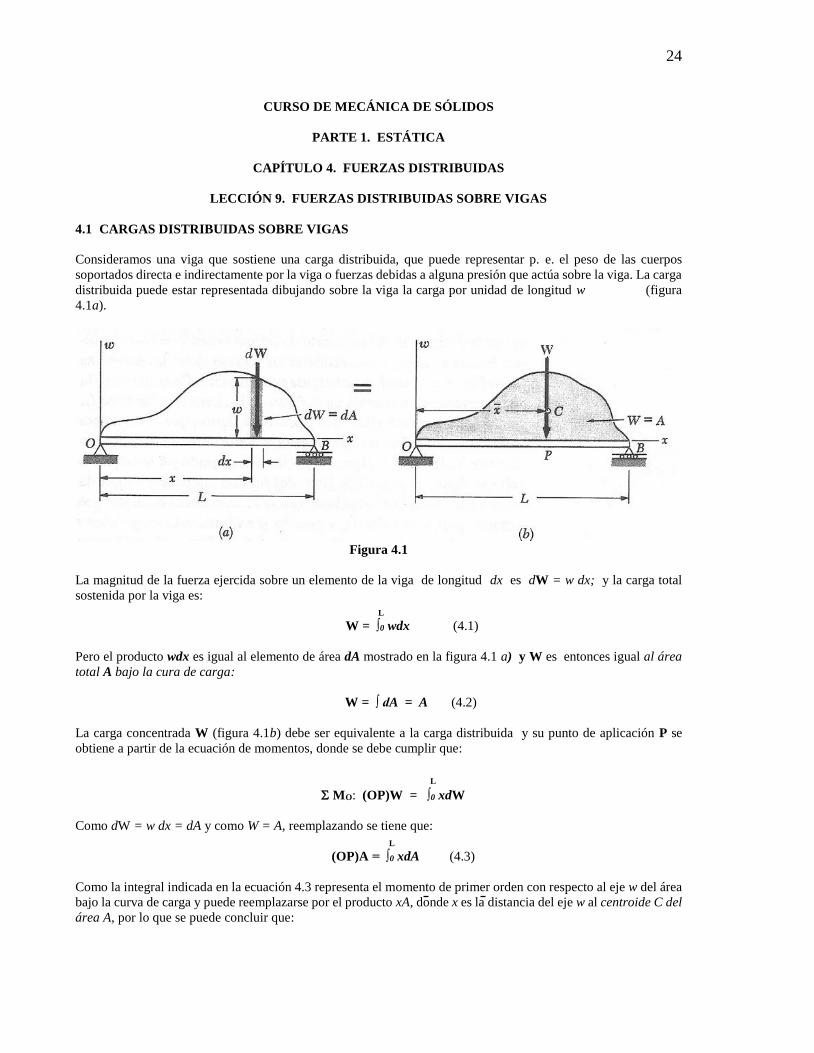
4.1 CARGAS DISTRIBUIDAS SOBRE VIGAS
Consideramos una viga que sostiene una carga distribuida, que puede representar p. e. el peso de las cuerpos
soportados directa e indirectamente por la viga o fuerzas debidas a alguna presión que actúa sobre la viga. La carga
distribuida puede estar representada dibujando sobre la viga la carga por unidad de longitud w (figura
4.1a).
Figura 4.1
La magnitud de la fuerza ejercida sobre un elemento de la viga de longitud dx es dW = w dx; y la carga total
sostenida por la viga es:
L
W = ∫0 wdx (4.1)
Pero el producto wdx es igual al elemento de área dA mostrado en la figura 4.1 a) y W es entonces igual al área
total A bajo la cura de carga:
W = ∫ dA = A (4.2)
La carga concentrada W (figura 4.1b) debe ser equivalente a la carga distribuida y su punto de aplicación P se
obtiene a partir de la ecuación de momentos, donde se debe cumplir que:
L
MO: (OP)W = ∫0 xdW
Como dW = w dx = dA y como W = A, reemplazando se tiene que:
L
(OP)A = ∫0 xdA (4.3)
Como la integral indicada en la ecuación 4.3 representa el momento de primer orden con respecto al eje w del área
bajo la curva de carga y puede reemplazarse por el producto xA, donde x es la distancia del eje w al centroide C del
área A, por lo que se puede concluir que:
25
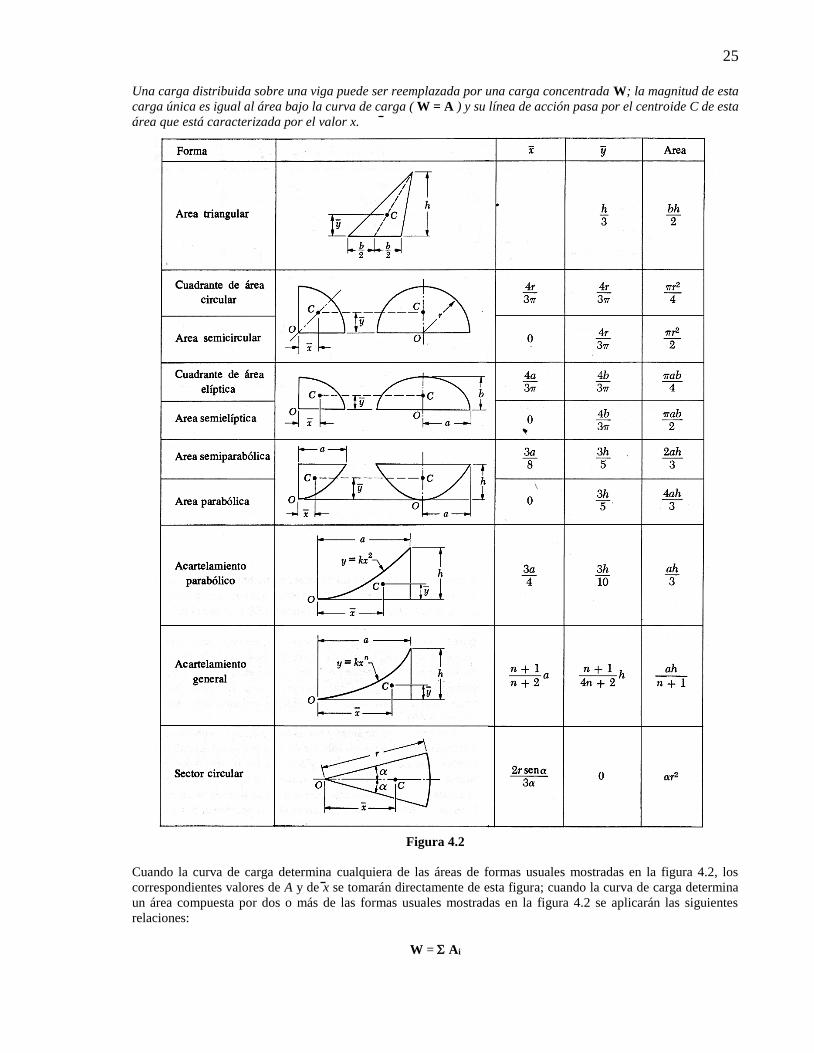
Una carga distribuida sobre una viga puede ser reemplazada por una carga concentrada W; la magnitud de esta
carga única es igual al área bajo la curva de carga ( W = A ) y su línea de acción pasa por el centroide C de esta
área que está caracterizada por el valor x.
Figura 4.2
Cuando la curva de carga determina cualquiera de las áreas de formas usuales mostradas en la figura 4.2, los
correspondientes valores de A y de x se tomarán directamente de esta figura; cuando la curva de carga determina
un área compuesta por dos o más de las formas usuales mostradas en la figura 4.2 se aplicarán las siguientes
relaciones:
W = Ai
26
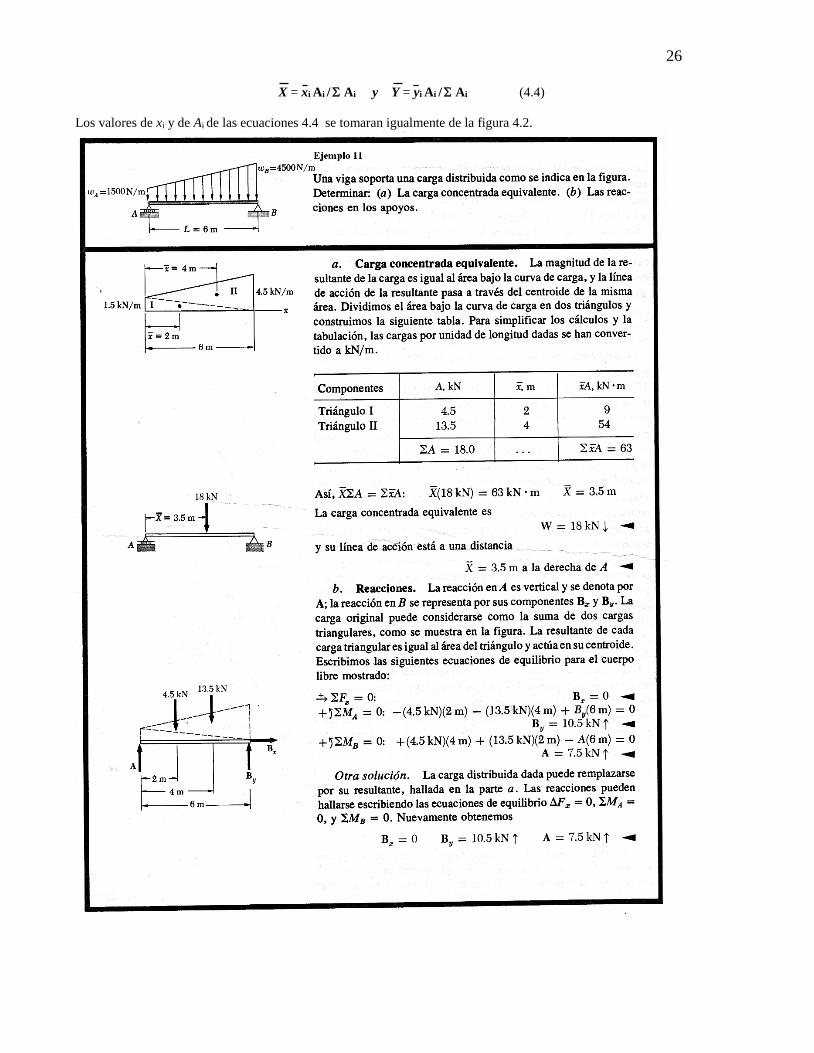
X = xi Ai / Ai y Y = yi Ai / Ai (4.4)
Los valores de xi y de Ai de las ecuaciones 4.4 se tomaran igualmente de la figura 4.2.
27
CURSO DE MECÁNICA DE SÓLIDOS
PARTE 1. ESTÁTICA
CAPÍTULO 5. ESTRUCTURAS
LECCIÓN 10. ANÁLISIS DE ESTRUCTURAS
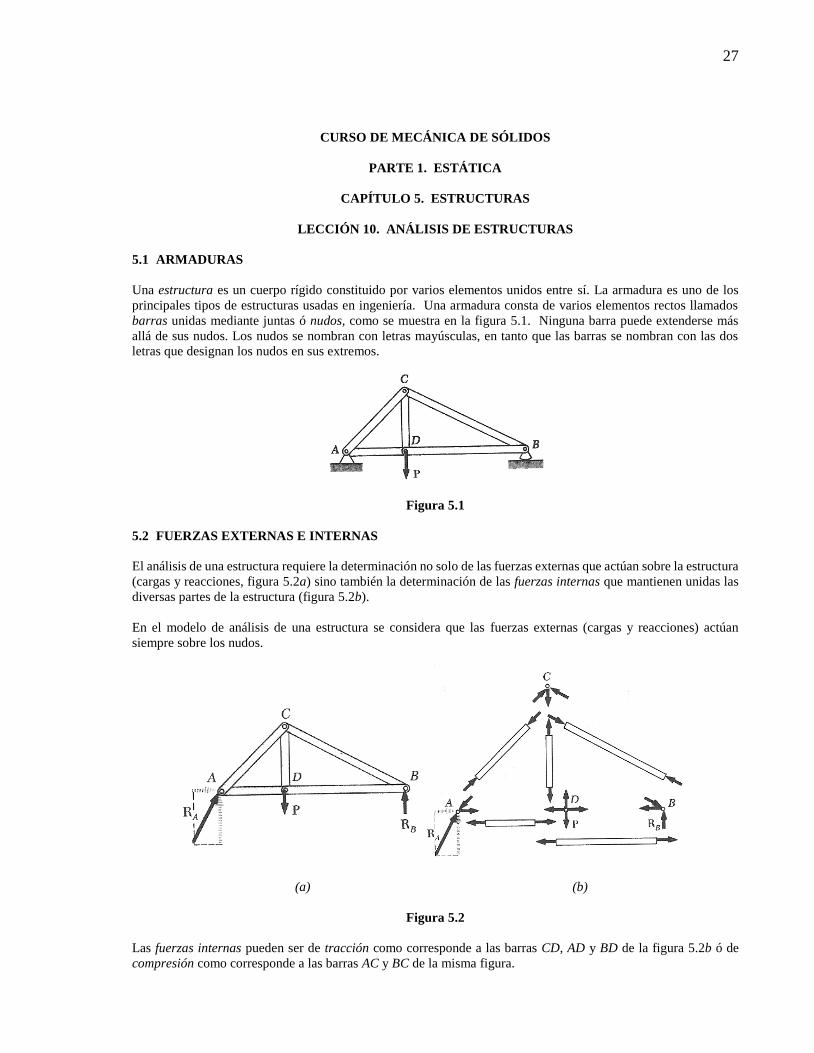
5.1 ARMADURAS
Una estructura es un cuerpo rígido constituido por varios elementos unidos entre sí. La armadura es uno de los
principales tipos de estructuras usadas en ingeniería. Una armadura consta de varios elementos rectos llamados
barras unidas mediante juntas ó nudos, como se muestra en la figura 5.1. Ninguna barra puede extenderse más
allá de sus nudos. Los nudos se nombran con letras mayúsculas, en tanto que las barras se nombran con las dos
letras que designan los nudos en sus extremos.
Figura 5.1
5.2 FUERZAS EXTERNAS E INTERNAS
El análisis de una estructura requiere la determinación no solo de las fuerzas externas que actúan sobre la estructura
(cargas y reacciones, figura 5.2a) sino también la determinación de las fuerzas internas que mantienen unidas las
diversas partes de la estructura (figura 5.2b).
En el modelo de análisis de una estructura se considera que las fuerzas externas (cargas y reacciones) actúan
siempre sobre los nudos.
(a) (b)
Figura 5.2
Las fuerzas internas pueden ser de tracción como corresponde a las barras CD, AD y BD de la figura 5.2b ó de
compresión como corresponde a las barras AC y BC de la misma figura.
28
Analizar una estructura consistirá en encontrar las fuerzas internas y determinar si éstas son de tracción o de
compresión.
5.3 MÉTODO DE LOS NUDOS
Uno de los métodos utilizados para hacer el análisis de una estructura se conoce como método de los nudos. El
método de los nudos se fundamenta en la siguiente premisa: Si toda la estructura está en equilibrio, cada uno de
sus nodos también está en equilibrio.
El método de los nudos se desarrolla aplicando el siguiente algoritmo:
P1. Determinar los ángulos con la horizontal de todas las barras que presentan inclinación.
P2. Equilibrar toda la estructura, considerándola como cuerpo rígido, para encontrar las reacciones en los apoyos.
P3. Dibujar el diagrama de cuerpo libre de toda la estructura de manera que se vean las fuerzas externas (cargas y
reacciones) que actúan sobre los nudos de la estructura.
P4. Se entra a equilibrar ordenadamente cada uno de los nudos. Ordenadamente quiere decir que de un nodo sólo
se puede pasar a otro que esté conectado con él. Obsérvese que cada nodo constituye una partícula, de modo
que el equilibrio supone solo dos ecuaciones; las incógnitas vienen a ser las fuerzas internas que son
desconocidas y máximo puede haber dos por nudo.
P4a. Para escribir las ecuaciones de equilibrio de cada nudo se debe dibujar su respectivo diagrama de fuerzas, las
fuerzas externas (cargas y reacciones) son completamente conocidas en tanto que de las fuerzas internas se
conoce sólo su dirección (la misma de la barra) y se deben dibujar en el diagrama suponiendo que son de
tracción, esto es, saliendo del nodo a lo largo de la barra.
P4b. Se escriben y resuelven las ecuaciones de equilibrio de cada nudo, encontrando los valores de las incógnitas.
Si el valor de la fuerza da con signo positivo significa que efectivamente la barra está en tracción; si por el
contrario da con signo negativo significa que la barra está en compresión y que la fuerza no sale sino que
entra al nudo.
P4c. Cuando se encuentra que una fuerza es de tracción en un nudo, también debe ser de tracción en el otro nudo
de la barra. Si se encuentra que una fuerza es de compresión en un nudo, también debe ser de compresión en
el otro nudo de la barra.
P4d. Al llegar al último nudo, no habrá incógnitas, de manera que las ecuaciones de equilibrio deben conducir a
una identidad de la forma 0 = 0.
P5. El análisis de la estructura se resume en una tabla en la que se da el valor de la fuerza en cada barra y se indica
si la fuerza es de tracción (T) ó de compresión (C). En el caso en que el valor de alguna fuerza de cero, se
dirá que la barra es de fuerza nula (N).
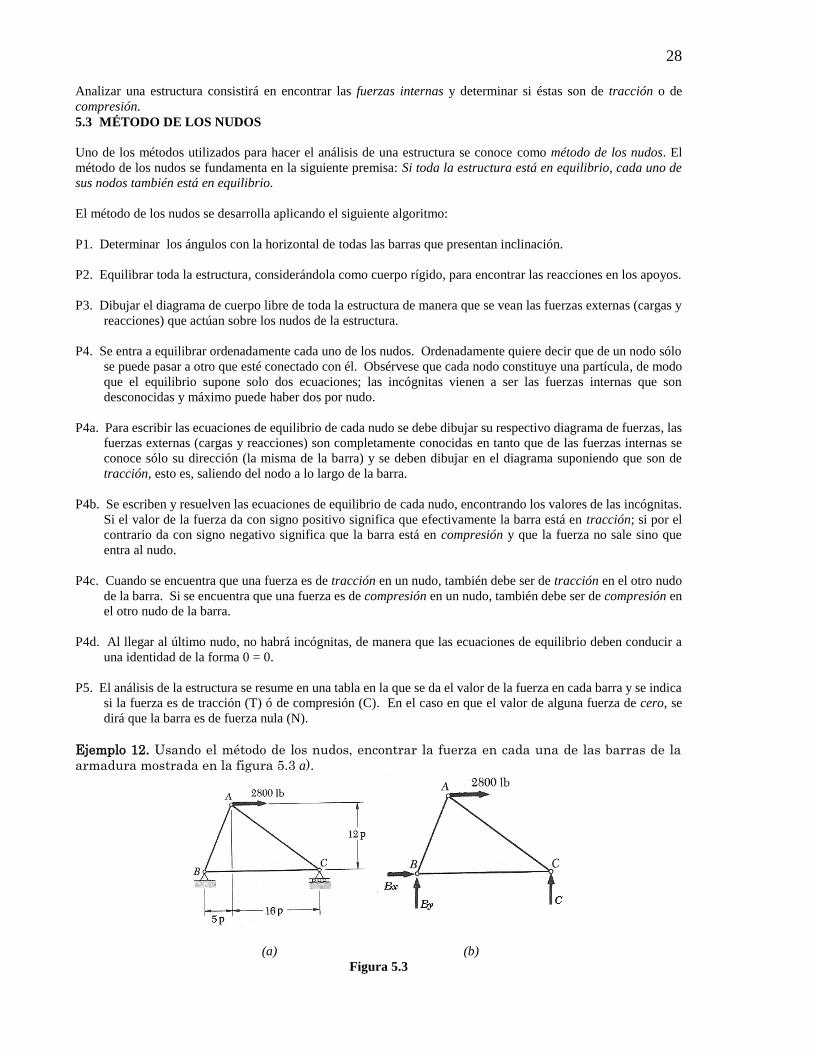
Ejemplo 12. Usando el método de los nudos, encontrar la fuerza en cada una de las barras de la
armadura mostrada en la figura 5.3 a).
(a) (b)
Figura 5.3
29
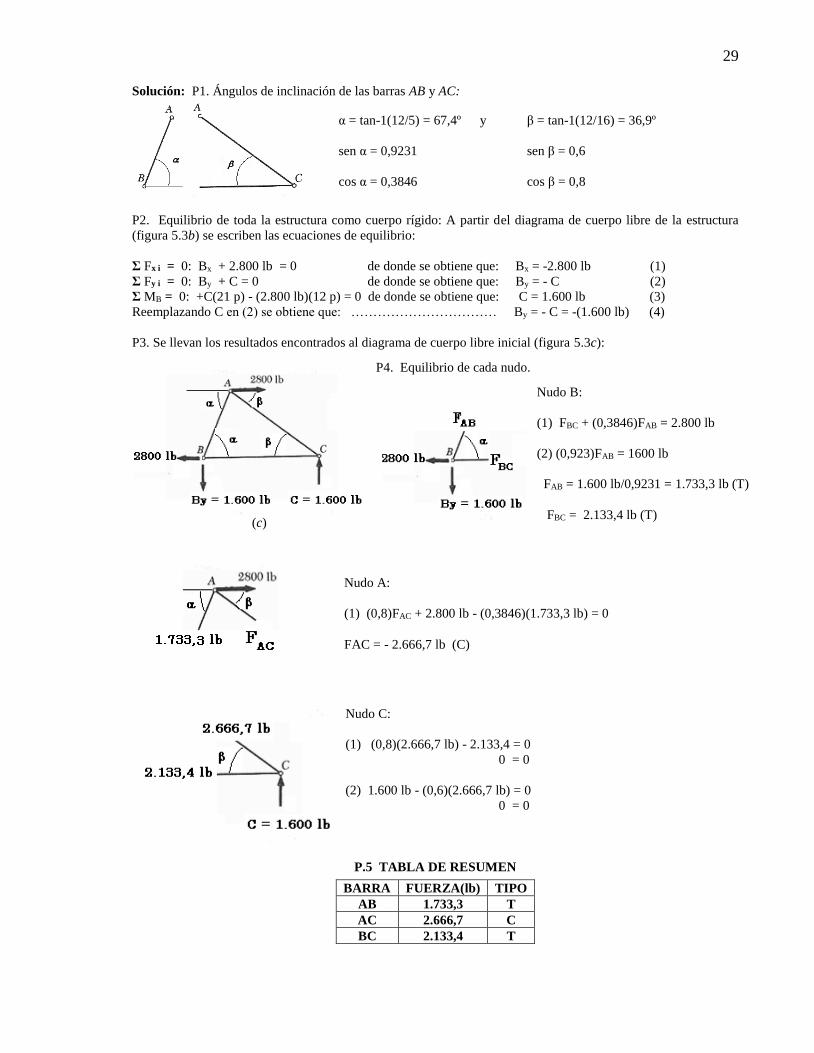
Solución: P1. Ángulos de inclinación de las barras AB y AC:
P2. Equilibrio de toda la estructura como cuerpo rígido: A partir del diagrama de cuerpo libre de la estructura
(figura 5.3b) se escriben las ecuaciones de equilibrio:
Σ Fx i = 0: Bx + 2.800 lb = 0 de donde se obtiene que: Bx = -2.800 lb (1)
Σ Fy i = 0: By + C = 0 de donde se obtiene que: By = - C (2)
Σ MB = 0: +C(21 p) - (2.800 lb)(12 p) = 0 de donde se obtiene que: C = 1.600 lb (3)
Reemplazando C en (2) se obtiene que: …………………………… By = - C = -(1.600 lb) (4)
P3. Se llevan los resultados encontrados al diagrama de cuerpo libre inicial (figura 5.3c):
(c)
P.5 TABLA DE RESUMEN
BARRA FUERZA(lb) TIPO
AB 1.733,3 T
AC 2.666,7 C
BC 2.133,4 T
α = tan-1(12/5) = 67,4º y β = tan-1(12/16) = 36,9º
sen α = 0,9231 sen β = 0,6
cos α = 0,3846 cos β = 0,8
P4. Equilibrio de cada nudo.
Nudo B:
(1) FBC + (0,3846)FAB = 2.800 lb
(2) (0,923)FAB = 1600 lb
FAB = 1.600 lb/0,9231 = 1.733,3 lb (T)
FBC = 2.133,4 lb (T)
Nudo A:
(1) (0,8)FAC + 2.800 lb - (0,3846)(1.733,3 lb) = 0
FAC = - 2.666,7 lb (C)
Nudo C:
(1) (0,8)(2.666,7 lb) - 2.133,4 = 0
0 = 0
(2) 1.600 lb - (0,6)(2.666,7 lb) = 0
0 = 0

30
BIBLIOGRAFIA
Beer, Ferdinand y Johnston, Russell. Mecánica Vectorial para Ingenieros. Estática.
México: Mc Graw Hill. 3 ed.