magnitude and time course of illusory translation perception during off-vertical axis rotation rens...
TRANSCRIPT

Magnitude and time course of illusory translation perception during off-vertical
axis rotation
Rens VingerhoetsPieter Medendorp
Jan Van Gisbergen

Contents
• Introduction- Sensors- Off-vertical axis rotation- Models
• Methods• Results
- Verbal estimates- Psychophysical data
• Model implications• Conclusions
Contents

Sensory signals involved in spatial orientation:
• Visual Cues• Semicircular canals• Otoliths• Somatosensory cues
Introduction - Sensors

Introduction - Sensors
The semi-circular canals
• Sensitive to angular acceleration• High-pass filter

Introduction - Sensors
The otoliths
• Sensitive to acceleration caused by:– Gravity– Inertial acceleration

Off-Vertical Axis RotationVertical Axis Rotation
Introduction
What is off-vertical axis rotation (OVAR)?

What is off-vertical axis rotation (OVAR)?
• Rotation in yaw about an axis that is tilted relative to the direction of gravity.
Stimulation of both otoliths and canals
Introduction
Left Ear Down (LED) Right Ear Down (RED)Nose Up (NU) Nose Down (ND)

What causes this percept?
Left Ear Down (LED) Right Ear Down (RED)Nose Up (NU) Nose Down (ND)
Introduction
What happens during OVAR?
Otolith signal from tilt interpreted as translation?
LED
ND
NU
RED
ND
LEDRED
NU
R

Introduction – Otolith Disambiguation
Neural strategy for otolith disambiguation:
Filter hypothesis
Acceleration

Introduction – Otolith Disambiguation
Neural strategy for otolith disambiguation:
Canal-Otolith interaction
Acceleration
Rotation

Introduction – research question
Do these models apply to self-motion perception during OVAR?
To check this quantitative data is required

Methods
Experimental setup
Picture of vestibular chair

Methods
Experimental setup • 6 subjects • 2 series (only clockwise rotation)
- Tilt series: 0, 15 and 30 deg tilt at 30 deg/s- Speed series: 20, 30, 40 and 50 deg/s at 15 deg tilt
• Each experimental condition consisted of 18-20 runs of 180 s each
• Subjects indicated verbally when cone illusion started
• Subjects reported the perceived radius
• Self-motion percept quantified with laser method

Experiment
Laser method
v
• Screen and motorized laser on board of the chair
• Every NU and ND phase projection of moving laser dot
• Subject indicated with a toggle switch if the dot was moving too fast/slow in direction opposite to perceived selfmotion
• ‘Matching velocity’ obtained using two methods:
- 0-110 s: Adaptive staircase over runs
- 110-180 s: Method of constant stimuli

Results I
Verbal Estimates

Results I – Verbal estimates
Reported cone illusion latencies
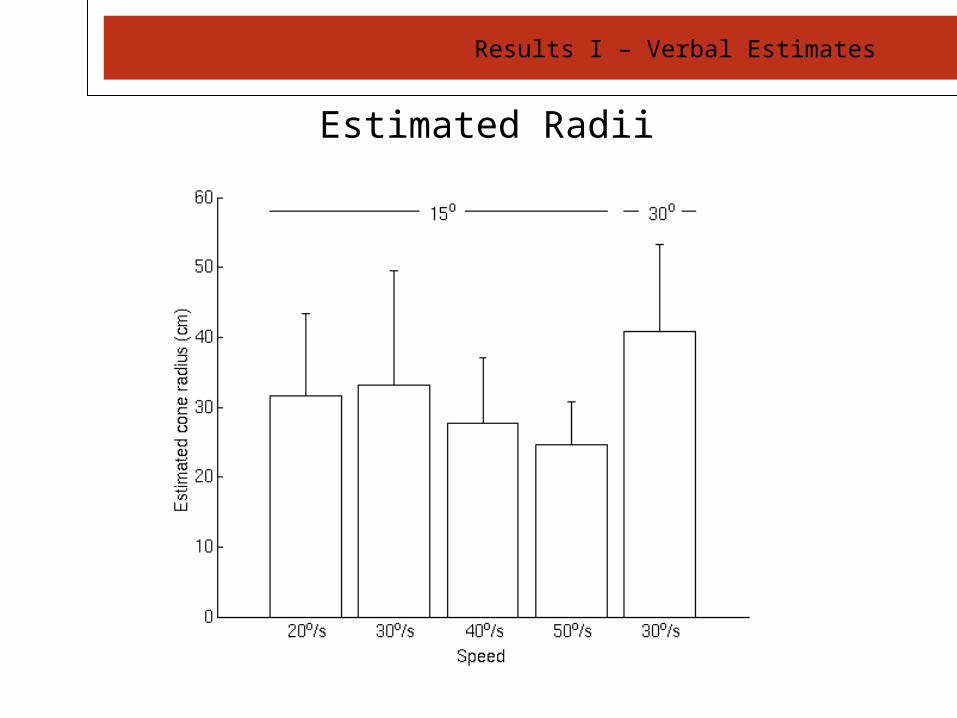
Results I – Verbal Estimates
Estimated Radii

Results II
Time course

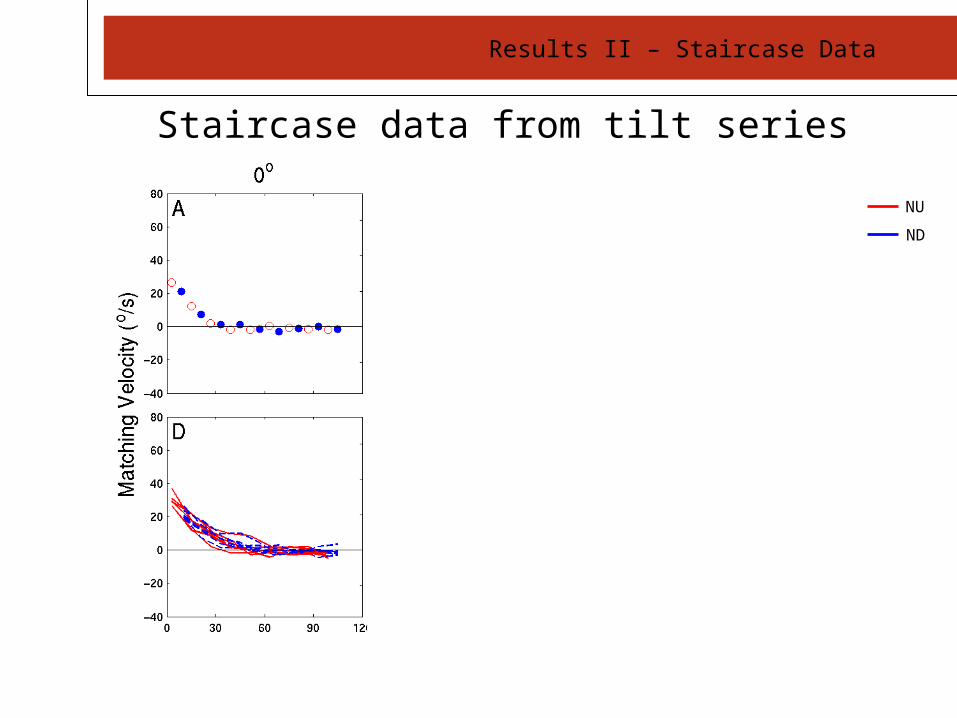
Results II – Staircase Data
Staircase data from tilt series
NU
ND
Results II – Staircase Data
Staircase data from tilt series
NU
ND
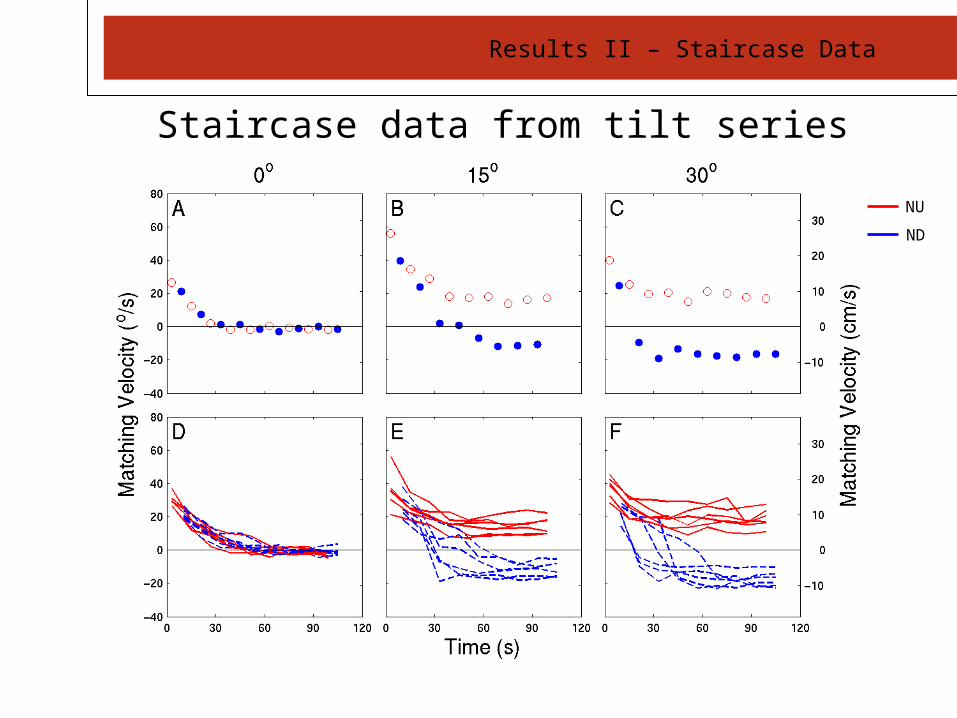
Results II – Staircase Data
Staircase data from tilt series
NU
ND

Results II – Staircase Data
Staircase data from speed series
NU
ND
Results II – Staircase Data
Summary staircase data
• Stereotyped exponential decay to zero in 30-60 s in zero-tilt condition
• During OVAR short exponential decay followed by bifurcation into two opposite velocity levels
• Results in agreement with anecdotal reports• Bifurcation depends on tilt angle• Bifurcation depends on rotation speed

Results III
Decomposition of response curves

Results III - Decomposition
Decomposition of response curves
• Two processes (R & T) underlie self-motion perception.
• R follows the same time course in both phases (NU & ND)
• T has opposite sign in both phases
• Hence, matching velocity is: VNU = R +T VND = R – T
• Consequently:R = (VND + VNU)/2T = (VNU - VND)/2
LEDRED
NU
ND
TR +
TR +

Results III - Decomposition
Decomposition data from tilt series
R
T

Results III - Decomposition
Decomposition data from tilt series
R
T

Results III - Decomposition
Decomposition data from tilt series
R
T

Results III - Decomposition
Decomposition data from speed series
R
T

Results III - Decomposition
Summary decomposition data
• R component shows exponential decay to zero independent of tilt angle and rotation speed
• T component starts at zero and gradually climbs to an asymptotic level.
• T component increase not always starts right after rotation onset• Asympotic value of T component depends on tilt angle and
rotation speed.

Results III - Decomposition
Fit to decomposition data
Rotation component:
R(t) = A * exp(-t/TR)
Translation component:
T(t) = 0 if t < T
T(t) = B * (1 – exp((-t-T)/TT) if t > T

Results III - Decomposition
Examples of fit

Results III - Decomposition
Fit parameters show us:
R component R(t) = A * exp(-t/TR)
• TR is constant across experimental conditions
• Initial amplitude (A) of R component increases with increasing rotation speed
T component
T(t) = 0 if t < T
T(t) = B * (1 – exp((-t-T)/TT)
• Incorporating a delay (T ) is essential
• Inter-subject differences for delay and TT
• Translation percept (B) increases both with tilt angle and rotation speed.

Results IV
Constant stimuli data

Results IV – Constant Stimuli
Constant stimuli data from tilt series
NU
ND

Results IV – Constant Stimuli
Constant stimuli data from speed series
NU
ND

Results IV – Constant Stimuli
Summary constant stimuli data
• Observations from staircase data confirmed:- Increase of matching velocity with tilt angle- Increase of matching velocity with rotation speed
• Width of psychometric curve increases with rotation speed

Models

Models
Model predictions
Canal-otolith interaction Filtering
30o/s and 15o tilt

Models
Model predictions
30o/s and 15o tilt
Canal-Otolith

Models
Model predictions
30o/s and 15o tilt
Canal-Otolith
Filter

Models
Model predictions
30o/s and 15o tilt
Data
Canal-Otolith
Filter
Models cannot account for observed time course

Models
Model predictions
15o tilt
Data
Canal-Otolith
Filter
Models predict too large translations

Conclusions

• We have developed a method that is able to capture the motion percepts that occur during OVAR
•Contemporary model hypotheses such as canal-otolith interaction and frequency segregation cannot explain our results
Conclusions

The End

Canal-otolith interaction model
-+
+ -++
+
-+
Body Dynamics Sensory Dynamics
S scc (s)
S oto (s)
S scc (s)
S oto (s)
-+
+
x
ˆ
ˆ
ˆ g
g
a f
e e f
e a
g
ˆ g
a
a ˆ f
ˆ oto ˆ scc
sccoto
kak fkfk
e f
ˆ ˆ
f
g = (- x g)dt
g = (- x g)dtˆ ˆ ˆ
Model of Body Dynamics
Model of Sensory Dynamics
Merfeld