m & m ee 296 final presentation spring 2004 presentation overview team member introduction...
Post on 21-Dec-2015
222 views
TRANSCRIPT
M & MEE 296 Final Presentation
Spring 2004
Presentation Overview Team Member Introduction Project Overview Overall Design Description Final Project Status Problems and Solutions Outstanding Problems
Alex Gomera Sophomore: electrophysics?!?! Favorite EE
Teacher: F. Koide
I hope to be like that man
David Larson Systems Track Least Favorite
Prof.: Prof.Siu
Paul Ramirez Lower Track: Computer
Systems Favorite Teacher: Prof. Dobry Quote: EE rules!
Arnold & Me
Me
Project Overview Build a fully autonomous robot Mouse Abilities:
Navigate and solve an arbitrary 16x16 maze in 10 minutes
Find the center of the maze in the shortest path or shortest amount of time
Programmed algorithms to: Record mouse movement in maze Find shortest path and avoid traps
Overall Design Description Initial Goals Hardware
Chassis / Motors Batteries Perf Board Layout Sensor Layout
Software
Initial Goals A working, cost-efficient micromouse Well designed both internally and
externally Gain knowledge from current teams
and advisor Right turn / left turn mouse Robust code for tracking Strong chassis to hold circuits together Heat sinks to prevent overheating
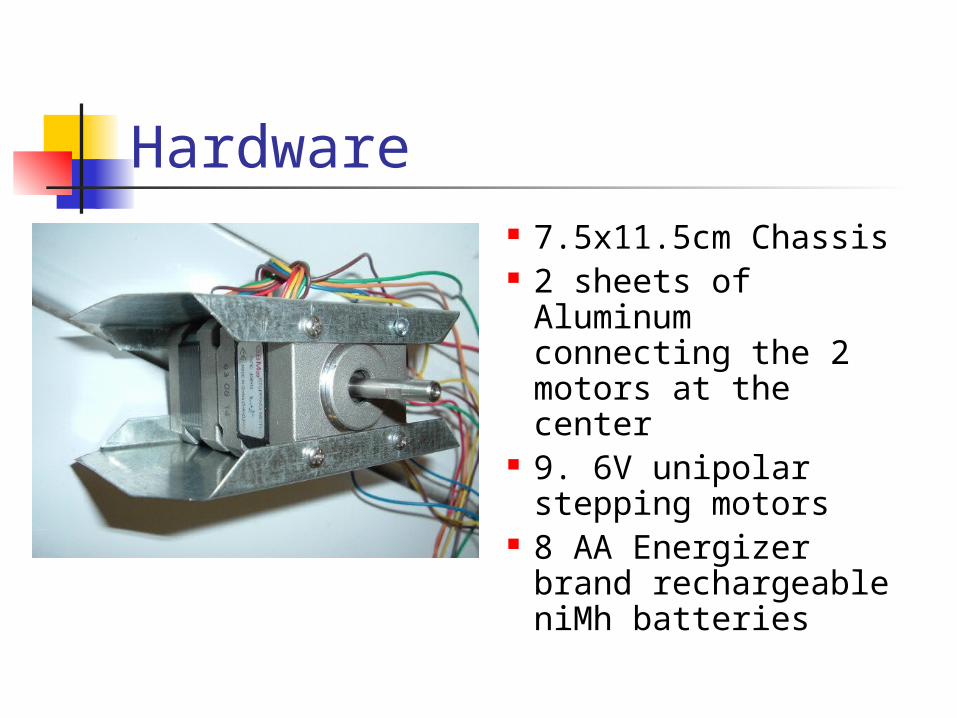
Hardware 7.5x11.5cm Chassis 2 sheets of Aluminum
connecting the 2 motors at the center
9. 6V unipolar stepping motors
8 AA Energizer brand rechargeable niMh batteries
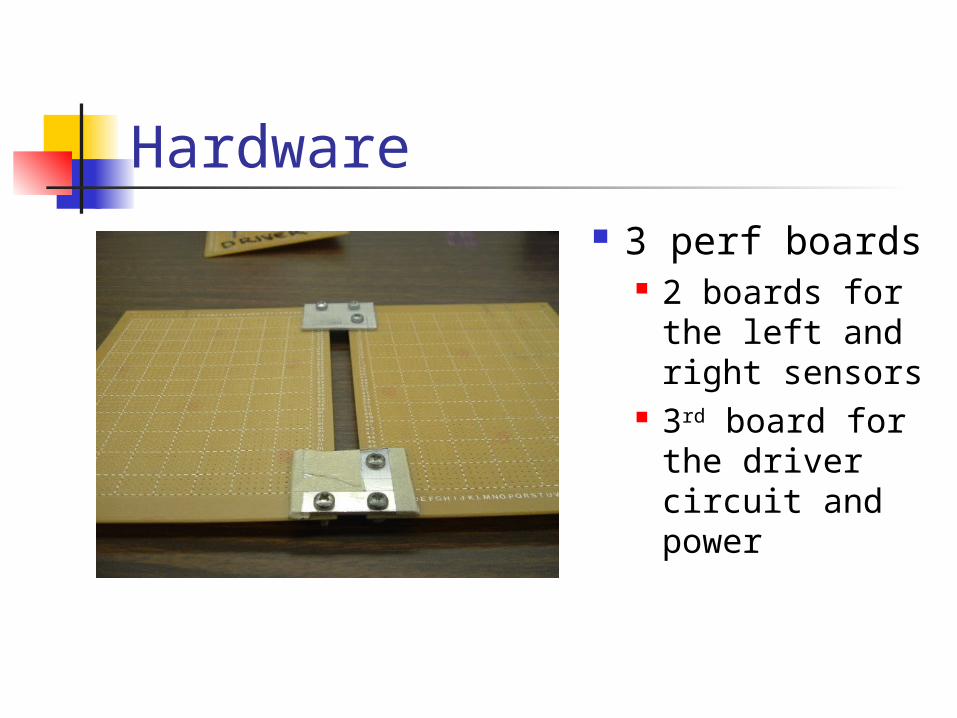
Hardware 3 perf boards
2 boards for the left and right sensors
3rd board for the driver circuit and power
Hardware 16 top down IR sensors (pic)
Placed in front of mouse Picture of LEDs (label tracking,
stopping, turning) 6 in the front for tracking and
correction 6 in back for tracking and correction 2 outer middle for left / right turns
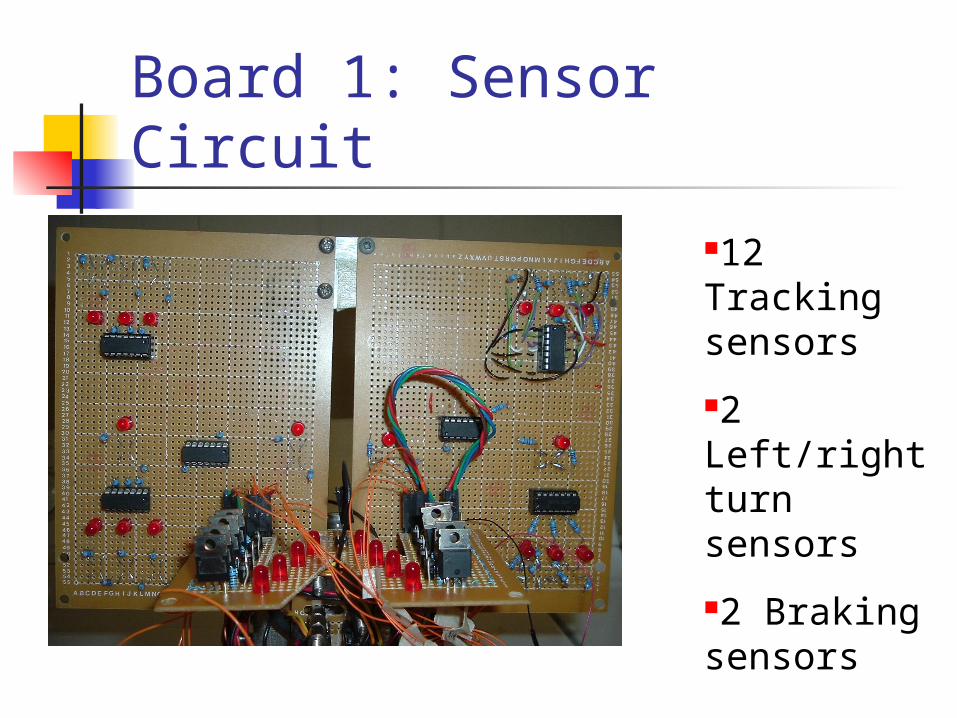
Board 1: Sensor Circuit
12 Tracking sensors
2 Left/right turn sensors
2 Braking sensors
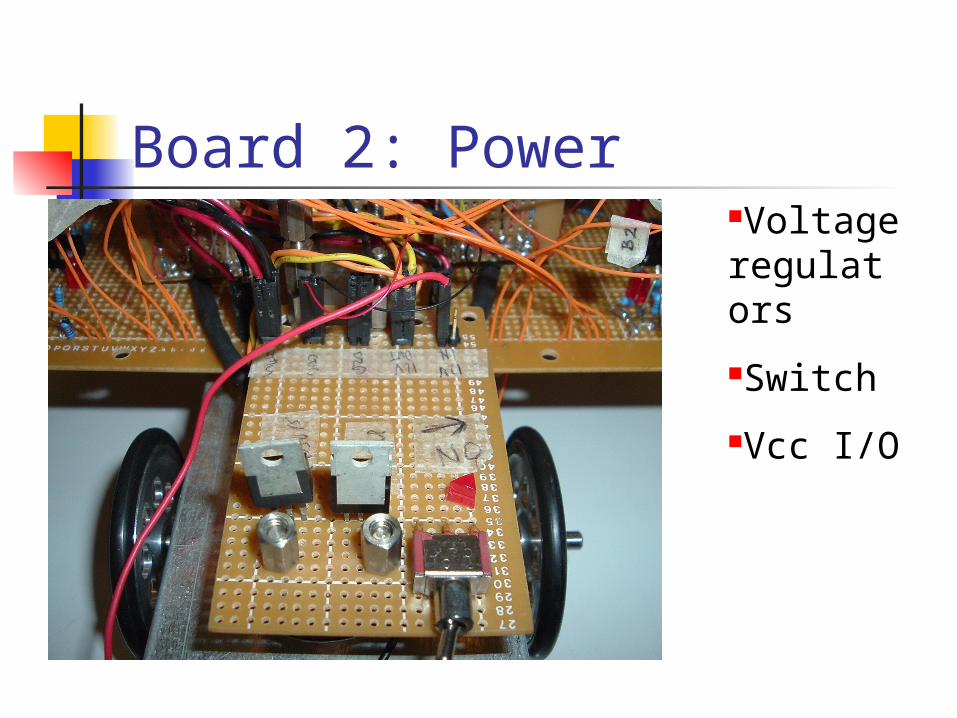
Board 2: PowerVoltage regulators
Switch
Vcc I/O
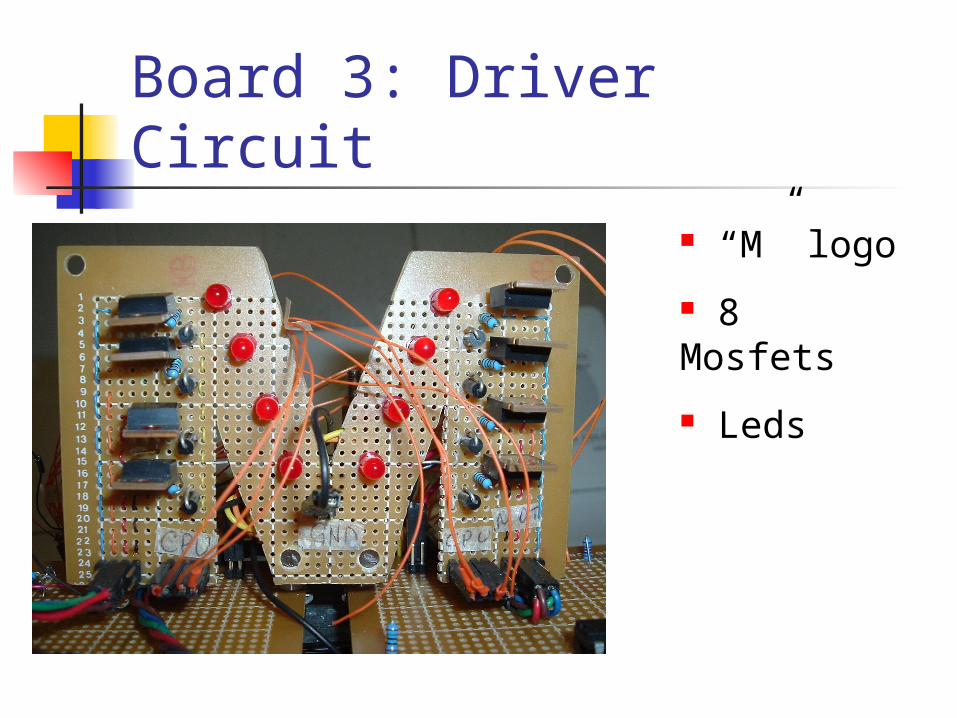
Board 3: Driver Circuit “M” logo
8 Mosfets
Leds
Final Project Status Hardware development complete
Rabbit processor issues that prevent the micromouse from running
Software development Planned to implement driver circuit
tests and sensor tests for tracking Implementation and troubleshooting of
tracking code
Problems and Solutions Time conflicts Time spent on project Malfunction of rabbit and driver circuit
Use of DMM to check for any short circuits, correct power flow into elements
Visually check and inspect for loose connections Solder and resolder if necessary Visually check if circuits, sensors, processor are
properly connected Sensor layout
Sensors were soldered too close together Found replacement sensors and salvaged the rest
Problems and Solutions Faulty motor
Right motor demagnitized Found a replacement motor
Driver circuit not working Certain elements were not grounded
Software Sending 0 as outputs instead of 1s “Processor not detected” error message
Problems and Solutions Downtime while waiting for
shipping Hardware not locally available
Processor Mosfets
Experience Gained Reading and building from circuit
schematics Dynamic C language Critical thinking and logic skills by
algorithm development Soldering and resoldering circuits
Experience Gained Team development and
communication skills Understanding processor functions and
capabilities Understanding how hardware and
software are interconnected Use of innovation in design process Understanding behavior of circuit
elements
20 20 Hindsight Delegate specific responsibilities to
each team member Ensure all members know proper
methods for connecting processor and other circuit elements before initial test runs
Order extra components before a fault occurs
Begin design process earlier
Summary Overall 296 project experience
Challenging, time consuming, yet fun Developed skills in software and
hardware development Small step towards being future
successful electrical engineers
Many thanks for all your help!
Puanani (Advising)
PACK Rat
Hawaiian Punch
Asphalt
Lost Café (Sensors)
Rabbit Support
Prof. Tep Dobry
(Advising)
Questions?