lidar methods for probing an atmospheric aerosol
TRANSCRIPT

Lidar methods for probing an atmospheric aerosolA. D. Egorov and I. A. Potapova
Branch of the A. I. Voe�kov Main Geophysical Observatory, St. Petersburg
G. G. Shchukin
Scientific Research Center for Remote Probing of the Atmosphere, Voeikovo, Leningrad Oblast~Submitted January 10, 2001!Opticheski� Zhurnal68, 10–14~November 2001!
This paper discusses the problem of the reliability with which the characteristics of anatmospheric aerosol are determined from the results of mono- and multiposition measurements ofbackscattering signals. Rigorous differential and approximate solutions of the optical-location equation are analyzed. The results of determining the transparency of atmospheric aircontaminated with industrial discharges and automotive exhausts are presented.Substantial variations are found in the relationship between the backscattering coefficient and theattenuation coefficient in an inhomogeneous atmosphere. It is concluded that the efficiencyof lidar methods for probing the atmosphere based on a rigorous solution of the problem isdetermined by the definiteness of the region in which they are applicable. ©2001 TheOptical Society of America.
a-oshdthesrat
paat
vethubtinsnat
eee
r-seori
ingenalsh a
ctor
e
e
o-f the
INTRODUCTION
The scientific and practical significance of lidar informtion concerning the characteristics of an atmospheric aeris provided by the efficiency with which it is obtained withigh spatial resolution and the range of applicable methoAt the same time, it is a complex problem to develop meods of lidar probing of scattering media. Its solution involvtaking into account a number of features of the lidar appatus and of the atmosphere being probed. These includegeometrical features of the transceiving circuits of the apratus, the specifics of the radiation being recorded, the spand temporal inhomogeneity of the media, etc.
Results important for the solution of the problem habeen obtained by many investigators. Nevertheless, furefforts are required to develop lidar methods in order to sstantially enhance the accuracy of the results of interprethe backscattering signals. This paper analyzes methodboth conventional monoposition probing and unconventiomultiposition probing. By multiposition probing is meanmeasurement from various points of space by a movabldar ~or system of lidars! with a fixed distance between thradiation source and detector much less than the distancthe given scattering section of the atmosphere.
PRINCIPLES OF METHODS FOR INTERPRETINGBACKSCATTERING SIGNALS
The interpretation of lidar information is based on invesion of the optical-location equation. For short probe puland in the single-scattering approximation, this equation cnects the backscattering signal with the optical charactetics of the atmospheric aerosol:
P~R,r !5A f~ uR2r u!b~R!expH 22Els~R8!dR8J , ~1!
801 J. Opt. Technol. 68 (11), November 2001 1070-9762/2001/1
ol
s.-
-he-
ial
er-gofl
li-
to
sn-s-
whereR is the radius vector of the scattering element beprobed;r is the radius vector of the point from which thlight pulses are sent and at which the backscattering sigare received, considering both monoposition probing witfixed radius vectorr and multiposition probing~the i th pointof the position of the transceiver corresponds to radius ver i!; P is the power of the backscattering signal;f is thegeometrical factor of the lidar;A is the lidar constant;b isthe backscattering coefficient;s is the attenuation coeffi-cient; R8 is the current radius vector of the point of thstraight line passing through pointsr and R; l is the linesegment@r , R# along which the integral in Eq.~1! is com-puted; anddR8 is a length element of the line segment.
A rigorous solution of Eq.~1! can be written as
@bjn#5@amj
n #21@~ ln S!m8 #, ~2!
whereS is the corrected echo signal, equal toP/ f , ( ln S)m8 isthe derivative with respect to themth probing direction,n isthe dimensionality of the probing space,
amj
n 5H cosamj, j <n,
22, j 5n11;
bjn5H ] ln b
]Xj, j <n
s, j 5n11,
cosamjare direction cosines equal to (Xj2xj )$( j 51
n (Xj
2xj )2%21/2, Xj and xj are the Cartesian coordinates of th
scattering element and of the transceiver, respectively.The solution of Eq.~2!, including the differentiation pro-
cedure, is burdened with a significant random error.1,2 It canbe implemented, for example, on sections of a fairly homgeneous atmosphere. On such sections, the difference o
80110801-04$18.00 © 2001 The Optical Society of America

ncr
e
nseayn
a.
onoxthin
ho
rio
edof
eri-
o-edentntin
ser
nm
s.gses. Ahexit-the
tom
tusas
n aon-ver,t inly
ef-
pro-entinc-
.
logarithmic derivatives of the signals received from differedirections must not be significant; i.e., the homogeneityterion
~ ln S!m8 5~ ln S!8, m51, 2, ...M , M>n11 ~3!
must be satisfied.When the criterion given by Eq.~3! is satisfied, the so-
lution given by Eq.~2! can be rewritten as
s521
2~ ln S!8,
] ln b
]Xj50, j <n. ~4!
The solution given by Eq.~4! differs from known solu-tions, for example, those of Refs. 3 and 4, by the presencthe criterion of its applicability given by Eq.~3!.
Another possibility of implementing a rigorous solutioof Eq. ~1! is associated with the existence of physical cauthat promote the formation of horizontally homogeneous lers in the atmosphere. The criterion of horizontal homogeity of a layer is that the following equations be satisfied:
~ ln S!m8 5Bn cosamn1Bn11 , m51, 2, ..., M . ~5!
with
s521
2Bn11 ,
] ln b
]Xn5Bn ,
] ln b
]Xj50, j ,n. ~6!
In practice, the probing is usually carried out inplane5,6 (n52), and this is taken into consideration below
The rigorous solution of the optical-location equatican be used in determining the parameters of the apprmate solutions. In particular, it is possible to determineconstantc in the power dependence of the backscattercoefficient on the attenuation coefficient,
b5Dsc, ~7!
which is used when developing methods of probing an inmogeneous atmosphere. The value ofc is determined by
c5F1
F28
~ ln S!282~ ln S!18
cosecw12cosecw2, ~8!
wherewm5p/22am2 is the tilt angle,
F15~ ln S!28 sinw12~ ln S!18 sinw2 ,
F25~ ln S!28 sin2 w12~ ln S!18 sin2 w2 .
Equation~8! is valid when the criterion given by Eq.~5!is satisfied.
The attenuation coefficients* (R* ) of an inhomoge-neous atmosphere outside the region where the critegiven by Eq.~5! is satisfied is associated with its values(R)inside this region by the integral equation7
S*g
s*2
Sg
s52gE
R*
R
SgdR8, ~9!
in which g51/c, and the value ofs is found from Eqs.~5!and ~6!.
802 J. Opt. Technol. 68 (11), November 2001
ti-
of
s-e-
i-eg
-
n
RESULTS OF LIDAR PROBING OF AN ATMOSPHERICAEROSOL
The solutions of the optical-location equation formulatabove are used in interpreting the data of the lidar probingan aerosol that has been carried out in a number of expments.
Equations~4! were used to determine the attenuation cefficient from the results of monoposition probing carriout as part of the comprehensive Leningrad experim~CLE, 1983–84! and the Soviet–American experimeAUTOEX-88 and multiposition probing of the atmospherethe neighborhood of a highway intersection~1991!.
The experiments used lidar based on a commercial lacloud-height meter~LCHM!.8 The parameters of the LCHMare as follows: The wavelength of the radiation is 694.3~using a transmitter based on a ruby laser!, the radiation en-ergy per pulse is 0.07–0.15 J, and the pulsewidth is 30 n
To prevent the radiation of the ruby laser from fallininto the absorption band of water vapor, the transmitter ua system to thermostatically control the active elementprism Q switch is used to obtain a short light pulse. Tdevice included a Galilean telescope system with an epupil diameter of 50 mm. It maintains a ray divergence attransmitter output no greater than 28 at half energy. A Keple-rian telescope system~field-of-view angle 38) is used to de-tect the backscattered signal~the echo signal!. An interfer-ence filter with a transmission halfwidth of 25 Å is usedprevent background illumination from the atmosphere frofalling on the photomultiplier of the detector. The apparais intended for recording the echo signal in a radius ofmuch as 1 km~in a homogeneous atmosphere! and for op-eration at any time of the year and day.
The recording apparatus in the CLE was mounted itelevision broadcast tower at a level of 200 m and was cnected by a set of cables to the output unit of the transceilocated at the same height. The probing was carried oudifferent directions in the neighborhood of the lidar, mainin a horizontal plane.9
The results of the determination of the attenuation coficient are shown in Fig. 1.
An analysis of these results shows that there was anounced seasonal variability of the attenuation coefficiunder the conditions of the CLE. Its maximum occurredthe winter and its minimum in the summer. In this conne
FIG. 1. Results of determining the attenuation coefficient in the CLE
802Egorov et al.
be
seu
erwaicfaren
e
en
-nsoongeevas
riw
ngT
idade
ga
d asas-
ofomck-t ofost
o-ec-nd
d inus
an-h aua-
s-als.nlyofcan
ngle
earethek-ig-at
on
on-re
nal
seerll -
tion, it should be pointed out that there is a correlationtween the attenuation coefficient and the concentrationaerosol particles with diameter,1 mm.10,11 The source ofthese particles is industrial and transport exhausts. Theirsonal variability is caused by the seasonal variability of hman economic activity and by the features of atmosphcirculation. The presence of an appreciable correlationconfirmed during the CLE in April 1984, when photoelectrmeasurements of the particle-size spectra by means oAZ-5 counter were carried out simultaneously with lidprobing of the aerosol. In particular, the numerical conctration of particles whose size exceeded 0.4mm could beapproximately determined from the results of a measuremof the attenuation coefficient by multiplying it by 100~theunits for the attenuation coefficient and the particle conctration are km21 and cm23, respectively!.
The Soviet–American experiment AUTOEX-88 to investigate the contamination of the air by automotive traport was carried out in September, 1988 in the neighborhof Pulkovo airport. Lidar probing of the atmosphere durithe experiment was done in order to determine the degreaerosol contamination of the air in the region of the KiHighway.12 The lidar was 450 m from the highway and wraised 2 nm above the ground.
The results of the lidar probing obtained in the expement are shown in Fig. 2, where the horizontal axis shothe distance from the lidar~at pointR50! to the scatteringvolume. The vertical axis shows the ratio of echo signalS,corrected by the geometrical factor, to its valueS0 at pointR050.3 km.
The ratioS/S0 depends on the ratio of the backscattericoefficients and on the transparency of the atmosphere.atmospheric transparency in the neighborhood of the lwas determined by probing the atmosphere along threerections with a small positive tilt angle. The variation of thazimuthal angle was limited within 63° – 128°.
As shown by an analysis of the results of the probinthe attenuation coefficients were within the limits of me
FIG. 2. Results of lidar probing in the AUTOEX-88 experiment. The crosshow echo signals averaged over a set of pulse bursts in an individual sof measurements. The curve shows the echo signal averaged over abursts.
803 J. Opt. Technol. 68 (11), November 2001
-of
a--ics
an
-
nt
-
-d
of
-s
heri-
,-
surement error. Thus, the atmosphere can be regardetransparent, and the backscattering coefficient can besumed to be proportional to the echo signal.
Figure 2 shows a maximum of the echo signal~and con-sequently of the backscattering coefficient! in the region ofthe center of the highway, with an appreciable degreecontamination being observed on a section up to 150 m frthe highway. Under the experimental conditions, the bascattering coefficient at the maximum, averaged over a sepulse bursts in an individual measurement cycle, was almtwice as large as its value outside the highway.
In January–February, 1991, lidar probing of the atmsphere was carried out in the neighborhood of the interstion of two major city streets: Prospekt Nepokorennykh aPiskarevskogo Prospekt.13 To provide a more completeanalysis of the state of the air basin, the lidar was mountea mobile-laboratory van. The pulses were sent in variodirections from several points of the survey region. Substtial damping of the light pulse was noted, associated witsignificant concentration of particles in the air. The attention coefficient reached (361) km21, which is several timesas great as the corresponding values found in the CLE.
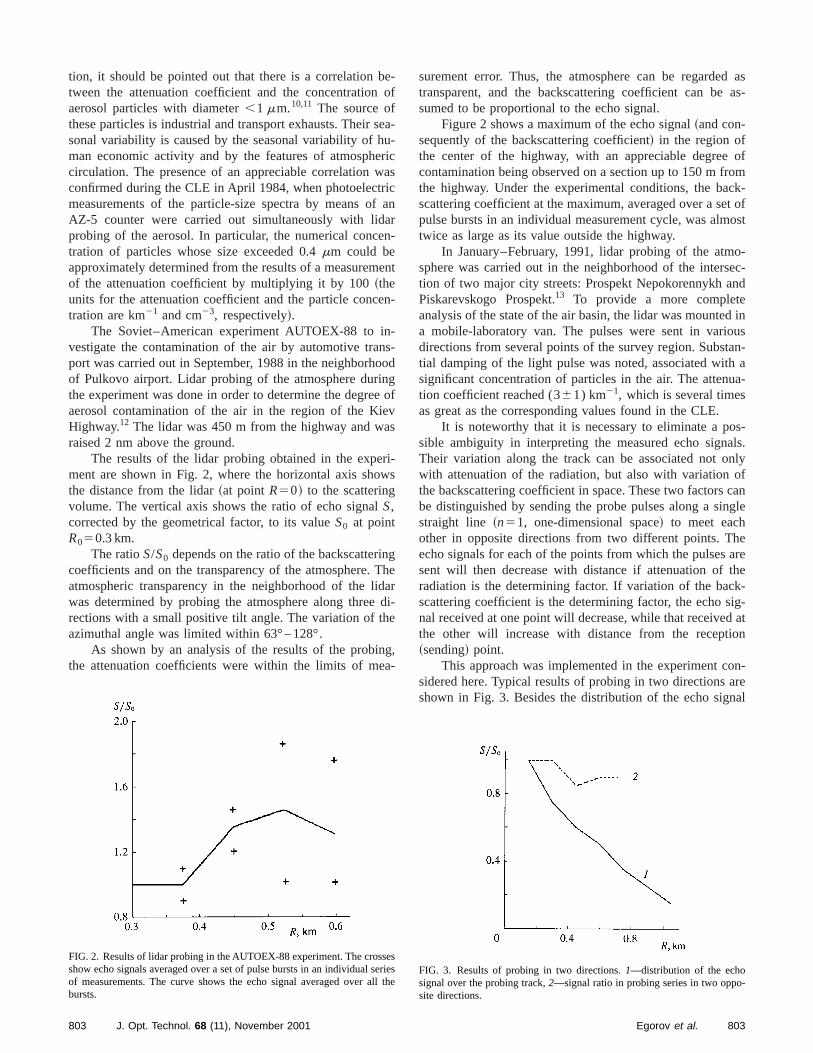
It is noteworthy that it is necessary to eliminate a posible ambiguity in interpreting the measured echo signTheir variation along the track can be associated not owith attenuation of the radiation, but also with variationthe backscattering coefficient in space. These two factorsbe distinguished by sending the probe pulses along a sistraight line ~n51, one-dimensional space! to meet eachother in opposite directions from two different points. Thecho signals for each of the points from which the pulsessent will then decrease with distance if attenuation ofradiation is the determining factor. If variation of the bacscattering coefficient is the determining factor, the echo snal received at one point will decrease, while that receivedthe other will increase with distance from the recepti~sending! point.
This approach was implemented in the experiment csidered here. Typical results of probing in two directions ashown in Fig. 3. Besides the distribution of the echo sig
siestheFIG. 3. Results of probing in two directions.1—distribution of the echosignal over the probing track,2—signal ratio in probing series in two opposite directions.
803Egorov et al.

inoon
thr
ithoo
oro
af
th
idn-ra
ien
h
solur
o
sheete
in-or-
o-cal-theibethe
e-co-
in,mo--993
n
.
-rom-sk
ef-logy
ons
e-
il-
s ofis-
tra-
nd
ov,inir
.of a
o-991
ingo-
f
along the probing track, this figure shows the signal ratioprobing series in two opposite directions. This ratio doesdiffer much from unity, and this is evidence that the radiatiattenuation is the determining factor.
The most complex results to interpret were those ofaerosol probing carried out in 1968 in the village of Siveski�, Leningrad Oblast. A comparison of the lidar data windependent measurements of the transparency of a homneous atmosphere by a visibility-range recorder, carriedin this experiment, showed that they were in satisfactagreement.14 On the other hand, the results of the probingan inhomogeneous atmosphere could be explained onlydeveloping algorithms based on Eqs.~5!–~9!.
The measurements in the experiment were made wilidar based on a ruby laser~radiation wavelength 694.3 nm!,which had an energy per pulse of 0.2–1 J and a pulsewof 50 ns. A prism Q switch in the cavity of the optical quatum generator provided the required pulsewidth. The opeing period of the device was 3–5 sec.
The relationship between the backscattering coefficand the attenuation coefficient was found by solving Eq.~9!for various probing directions and various probed layers. Tcorresponding rms deviationd is shown in Fig. 4 for twomeasurement cycles. The desired value of the constantg isdefined as the value for which thed(g) function is mini-mized. The system is more efficient for an optically denand/or inhomogeneous atmosphere, as follows from a stion of the direct and inverse problems with realistic pertbations introduced into the echo signals. A comparisonthese two dependences shows that theg values found whenthey are analyzed differ by almost a factor of 3. The posbility of such substantial variations of the relationships of toptical parameters is usually neglected when measuremare made and significantly complicates the methods of in
FIG. 4. Root-mean square deviation of solutions of the integral equationvarious probing directions and various probed layers.1—8/27/68,2—9/11/68.
804 J. Opt. Technol. 68 (11), November 2001
nt
e-
ge-utyfter
a
th
t-
t
e
eu--f
i-
ntsr-
preting lidar data. The results of the lidar probing of anhomogeneous atmosphere must be carefully analyzed inder to adequately describe the aerosol characteristics.
CONCLUSIONS
The efficiency of methods of lidar probing of an atmspheric aerosol based on a rigorous solution of the optilocation equation is determined by the definiteness ofregion in which they are applicable. To adequately descrthe characteristics of an inhomogeneous atmosphere,possibility of substantial variations of the relationships btween the attenuation coefficient and the backscatteringefficient must be taken into account.
1A. D. Egorov, V. A. Kovalev, V. D. Stepanenko, and G. G. Shchuk‘‘Lidar probing of an aerosol and of the gaseous components of the atsphere by unconventional methods,’’ inTransactions of the Eleventh Symposium on Laser and Acoustic Probing of the Atmosphere, Tomsk, 1,pp. 137–140.
2A. D. Yegorov and G. G. Shchukin, ‘‘Effectiveness of multipositioschemes of lidar sounding of atmosphere,’’ Proc. SPIE3583, 478 ~1998!.
3R. T. Brown, Jr., ‘‘A new lidar for meteorological application,’’ J. ApplMeteorology12, 698 ~1973!.
4G. M. Krekov, L. S. Ivlev, M. T. Anodin, and V. A. Rastoskuev, ‘‘Checking the assumption of the horizontal homogeneity of the atmosphere fthe data of laser probing,’’ inTransactions of the Fifth All-Union Symposium on Laser and Acoustic Probing of the Atmosphere, part 1, Tom,1978, pp. 84–86.
5J. M. Kano, ‘‘On the determination of backscattered and extinction coficient of the atmosphere by using a laser radar,’’ in Papers Meteoroand Geophysics19, 121 ~1968!.
6V. M. Zakharov, V. S. Portasov, and I. S. Zhiguleva, ‘‘Procedural questiof laser radar of an aerosol atmosphere,’’ inRadiophysical Studies of theAtmosphere~Gidrometeoizdat, Leningrad, 1977!, pp. 61–62.
7J. D. Klett, ‘‘Stable analytical inversion solution for processing lidar rturns,’’ Appl. Opt.20, 211 ~1981!.
8M. M. Ioffe and M. G. Prikhod’ko,Handbook of Aviation Meteorology~Voenizdat, Moscow, 1977!.
9A. D. Egorov, S. G. Melikov, and R. M. Temnov, ‘‘Studies of the variabity of the aerosol concentration in the atmosphere of Leningrad,’’ inTrans-actions of the Second All-Union Conference on Methods and FacilitieMonitoring the Contamination of the Atmosphere and of Industrial Dcharges and their Use~Gidrometeoizdat, Leningrad, 1988!, pp. 153–157.
10R. J. Charlson, ‘‘Atmospheric visibility related to aerosol mass concention: A review,’’ Envir. Sci. Technol.3, 913 ~1969!.
11D. S. Ensor and M. J. Pilat, ‘‘The relationship between the visibility aaerosol properties of smokestack plumes,’’ J. Air Poll. Control Assoc.21,496 ~1971!.
12A. D. Yegorov, P. P. Boitzow, V. D. Stepanenko, and L. I. Shumak‘‘Lidar sensing of the lower atmospheric layer around a highway,’’Proceedings of the Soviet–American Symposium on Mobile-Source APollution (AUTOEX), 1992, Vol. 2, pp. 102–124.
13A. D. Egorov, V. N. Emel’yanova, A. A. Sin’kevich, and V. DStepanenko, ‘‘Optical characteristics of the atmosphere in the regionmajor street intersection with intense movement,’’ in theEleventh All-Union Symposium on the Propagation of Laser Radiation in the Atmsphere and Aqueous Media (Abstracts of Reports, part 1), Tomsk, 1,pp. 137–138.
14A. D. Egorov and V. D. Stepanenko, ‘‘Some features of the lidar probof aerosols,’’ inMeteorological Aspects of Contamination of the Atmsphere, vol. 3 ~Gidrometeoizdat, Moscow, 1981!, pp. 42–48.
or
804Egorov et al.