introduction to robotics and asu robots yinong chen (ph.d.) school of computing, informatics, and...
TRANSCRIPT

Introduction to Robotics and
ASU Robots
Yinong Chen (Ph.D.)School of Computing, Informatics, and Decision Systems Engineering

Outline
Components of a Robot2
Examples of Robots and Robot Design3
ASU-Carl Hayden-Intel Robots4
What is a Robot1

Computer Systems
3
Computer systems
Embeddedsystem
Personalcomputer
Multi-usercomputer
Laptop
Desktop
Mainframe
Workstation
General-purpose computer
Cell phone
PDA
Airplane
TV
Car
RobotGame machine
MP3 Player
GPS
Special-purpose computer

What is a Robot?• A robot is a mechanical device, it is programmable, and
controllable by a computer or by a human.• It is usually a system, which, by its appearance or
movements, conveys a sense that it has intent of its own.
Coroware
Kuka
Robosoft
RoboticsConnection
Mindstorm NXT
iRobot

Robot Body• The component that holds or connect other
components through links and joints:

Types of Joints• A ball joint allows rotation
around x, y, and z axes,
• A hinge joint allows rotation around one axis,
• A slider joint, which allows movement along one axis.
• A Spring joint, which allows free movement along all axes.
Source: www.impulse-based.de/manual.html
• Combined
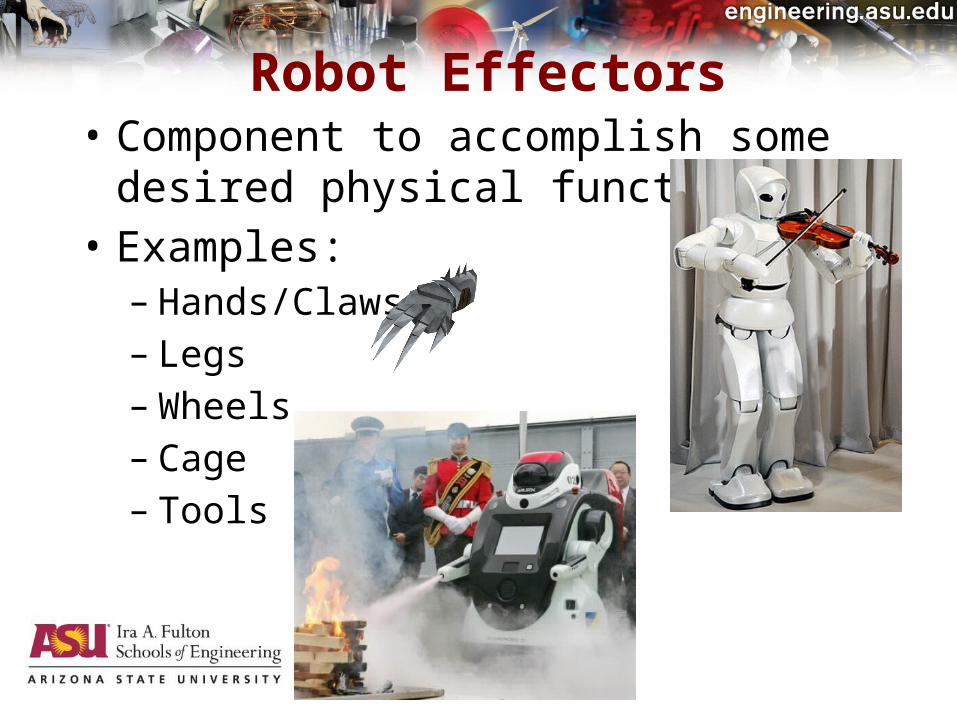
Robot Effectors• Component to accomplish some desired
physical functions• Examples:
– Hands/Claws– Legs– Wheels– Cage– Tools
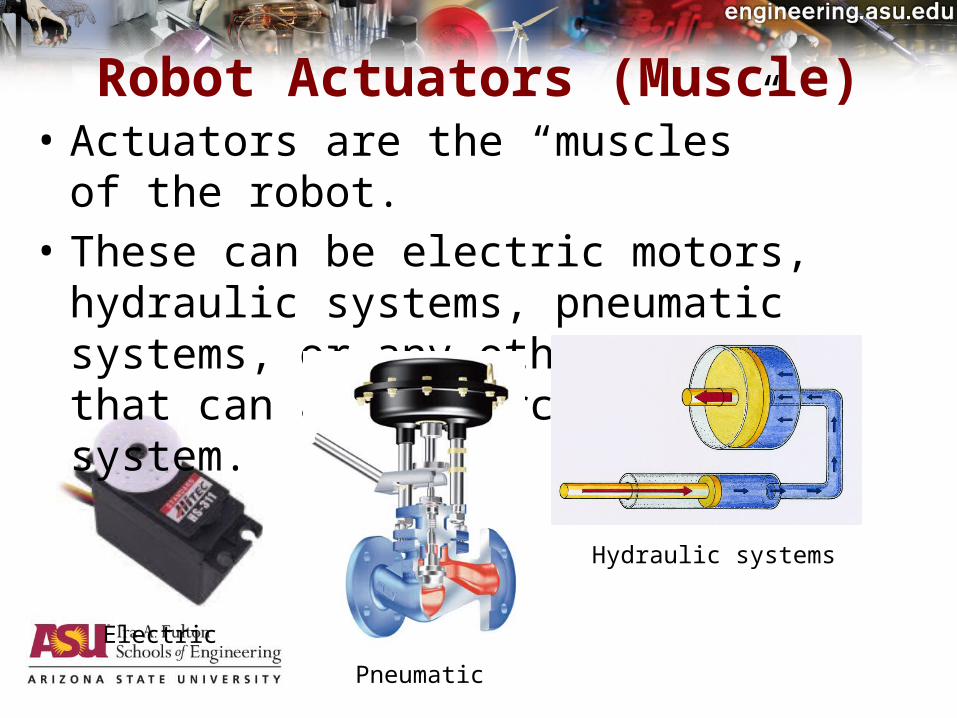
Robot Actuators (Muscle)• Actuators are the “muscles” of the robot.• These can be electric motors, hydraulic
systems, pneumatic systems, or any other system that can apply forces to the system.
Electric
Hydraulic systems
Pneumatic

Sensor Classes: Ranging sensors
Ranging sensors, such as sonar, ultrasonic, IR, and laser sensors:
These sensors return the distance to the object.
They typically have two lens (eyes). One sends out a light beam and the other receives the reflected beam.
By measuring the time and angle of reflected beam, the sensors can measure the distance to the object Distance = speed x time
Sensors derive information from environment.

Sensor Classes: Other SensorsThere are many types of sensors
Contact (touch) sensor: A signal is generated when touched
Compass (magnetic) sensor / Gyro senor (rotation) GPS (Global Positioning System) Color sensor: return different value
for different colors Temperature sensor
Return the temperature Cameras and microphones Vehicle accelerometer sensor Vehicle tire pressure sensor …
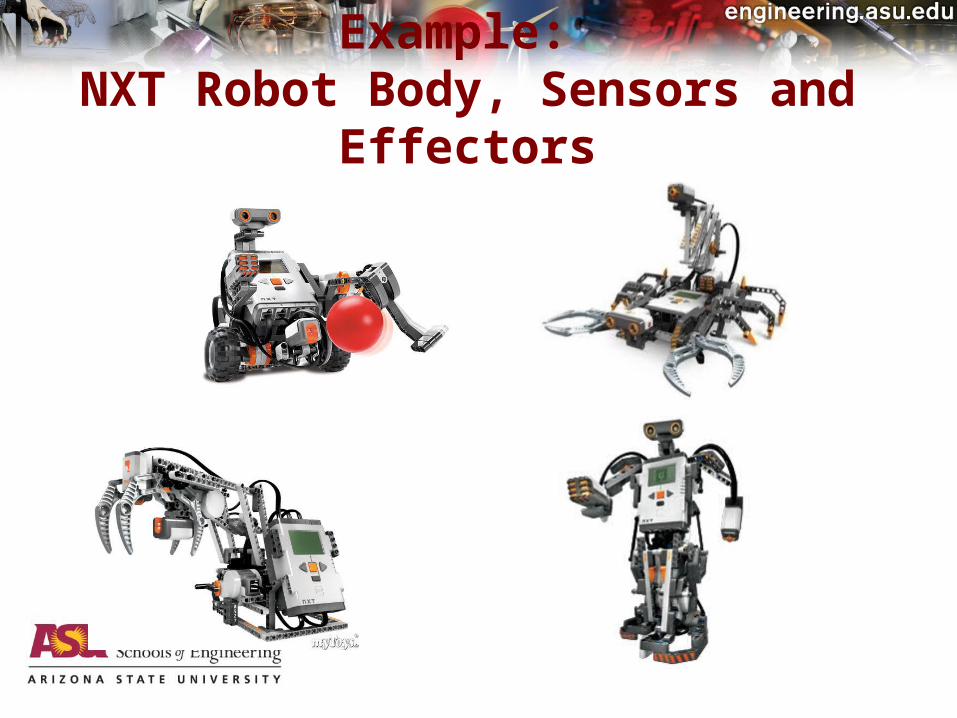
Example: NXT Robot Body, Sensors and Effectors
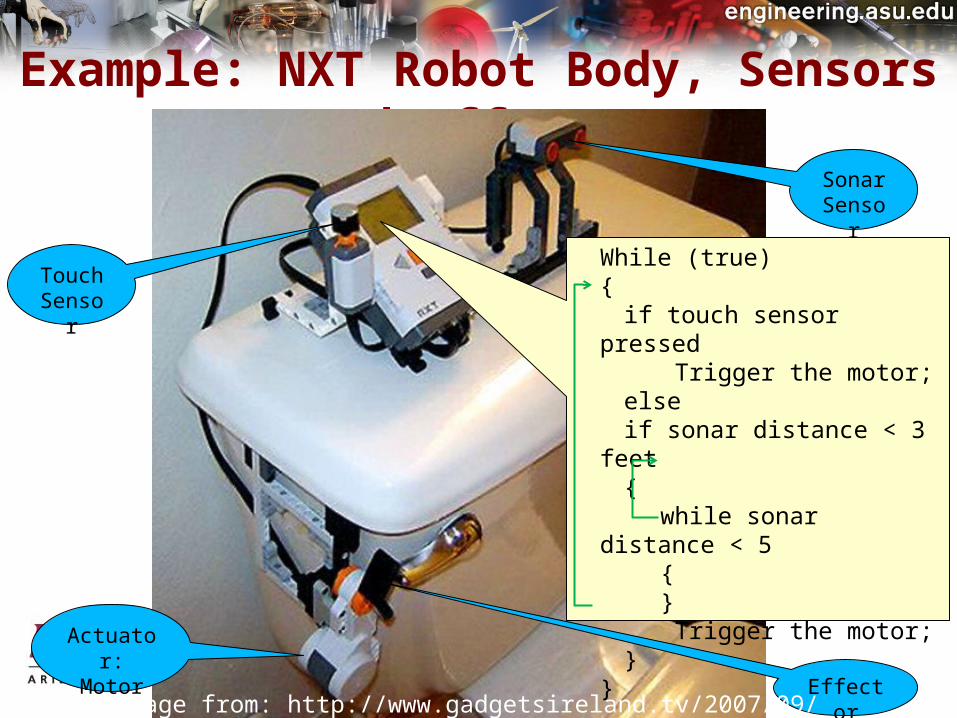
Example: NXT Robot Body, Sensors and Effector
Sonar Sensor
Touch Sensor
Actuator:Motor
Effector
While (true){
if touch sensor pressed Trigger the motor;
elseif sonar distance < 3 feet{
while sonar distance < 5 { } Trigger the motor;
}}
Image from: http://www.gadgetsireland.tv/2007/09/
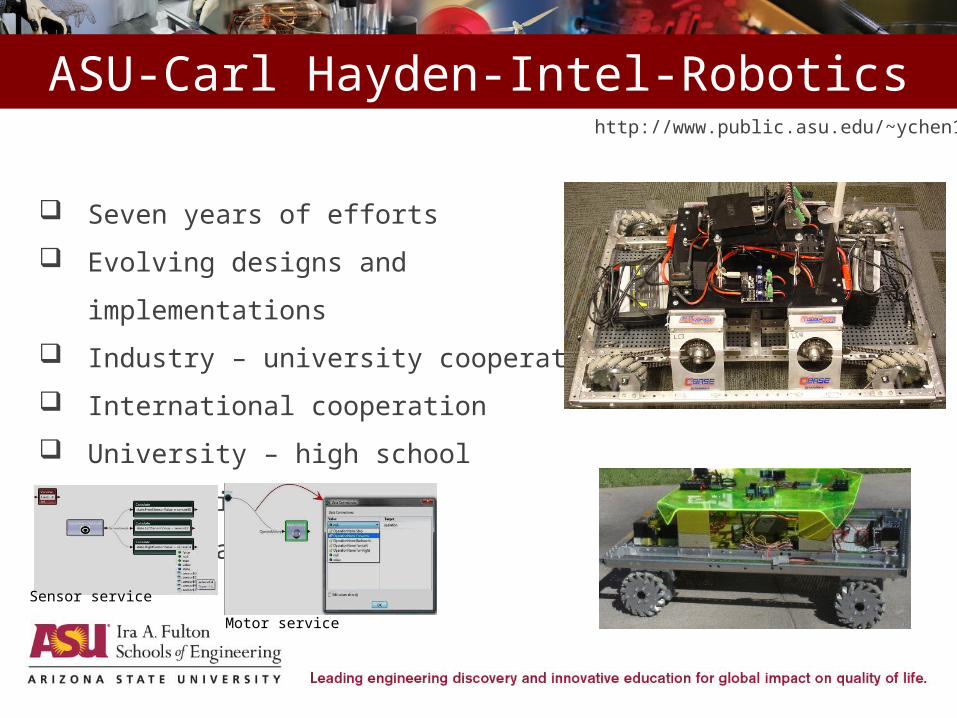
ASU-Carl Hayden-Intel-Robotics
Seven years of efforts
Evolving designs and implementations
Industry – university cooperation
International cooperation
University – high school cooperation
We have a working RaaS
http://www.public.asu.edu/~ychen10/
Sensor service
Motor service