inteligencia artificial (ec5) · agentes inteligentes del software – softbots apuntes del mg....
TRANSCRIPT

Facultad de Ciencias Exactas y Tecnología Universidad Nacional de Tucumán
Mg. Gustavo E. Juárez
Agentes Inteligentes del Software
Inteligencia Artificial (EC5)
Introducción. Definición. Intención de la Inteligencia Artificial. Tipificación de los
Agentes: Con Capacidad de Aprendizaje, de Reflejos Simples, Bien Informados, Basados
en Metas y Basados en Utilidad. Entorno de un agente. Programas de Ambientes.
Racionalidad. Factores y rendimiento. Sistemas Multiagentes.
UNIDAD TEMÁTICA 5: AGENTES INTELIGENTES DEL SOFTWARE – SOFTBOTS
Apuntes del Mg. Gustavo E. Juárez
Parte 1
Apuntes del Mg. Gustavo E. Juárez
AGENTES INTELIGENTES DEL SOFTWARE – SOFTBOTS
Apuntes del Mg. Gustavo E. Juárez
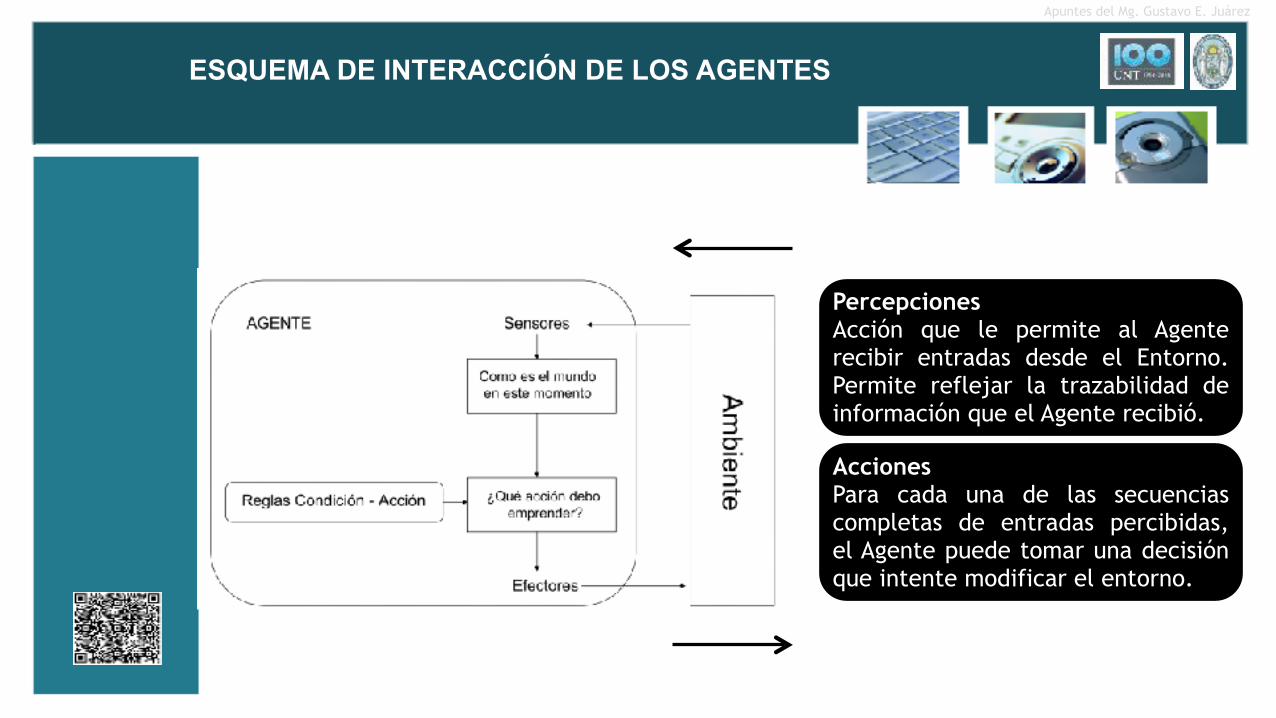
Percepciones Acción que le permite al Agente recibir entradas desde el Entorno. Permite reflejar la trazabilidad de información que el Agente recibió.
Acciones Para cada una de las secuencias completas de entradas percibidas, el Agente puede tomar una decisión que intente modificar el entorno.
ESQUEMA DE INTERACCIÓN DE LOS AGENTES
Apuntes del Mg. Gustavo E. Juárez
Si buscamos la definición de agente en el DRAE, podemos encontrar cosas como estas
“Que obra o tiene virtud de obrar; persona o cosa que produce un
efecto; persona que obra con poder de otra.”
“Un agente es una entidad que percibe o actúa sobre un entorno (de
forma razonada)”
DEFINICIÓN: LA ACADEMIA
Apuntes del Mg. Gustavo E. Juárez
[Russell&Norvig]
“Un agente es cualquier entidad que percibe su entorno a través de sensores y actúa sobre
ese entorno mediante efectores. Un agente es racional cuando realiza la mejor acción
posible a partir de los datos percibidos”
[Wooldridge]
Un agente inteligente es un sistema (hardware o software) situado en un determinado
entorno, capaz de actuar de forma autónoma y razonada en dicho entorno para conseguir
unos objetivos”
DEFINICIONES
Apuntes del Mg. Gustavo E. Juárez
“Los agentes son sistemas computacionales que habitan en entornos
dinámicos complejos, perciben y actúan de forma autónoma en ese
entorno, realizando un conjunto de tareas y cumpliendo objetivos para los
cuales fueron diseñados”
Pattie Maes (Media Lab. Massachusetts Institute of Technology. MIT)
https://www.media.mit.edu/
DEFINICIONES
Posea recursos propios Posea facilidades para comunicarse con otros agentes.
Es esencial definir el campo de aplicación de los Agentes.
Es eficiente describir un agente a partir de sus características mas representativas.
Sea capaz de percibir (quizás de manera limitada) su entorno.
Disponga de una representación parcial de su entorno (eventualmente nula).
Posea experiencia en ciertos ámbitos y pueda ofrecer sus
servicios.
Posea un conjunto de tendencias, en forma de objetivos individuales o de funciones de satisfacción que
intente optimizar.
CARACTERÍSTICAS
Apuntes del Mg. Gustavo E. Juárez
• Autonomía: capacidad para actuar por cuenta propia, es decir que operan sin intervención de otros agentes para encontrar sus objetivos y tienen control sobre sus acciones y estados internos. Un agente carece de autonomía cuando se apoya mas en el conocimiento inicial proporcionado por su diseñador, que en sus propias percepciones del entorno;
• Inteligencia: incorporación de cierta lógica cerrada, o entendida como función adaptable al entorno (capacidad de aprendizaje). El agente no solamente debe ser capaz de recopilar información del entorno, sino también aprender lo máximo posible de lo que está percibiendo. Hay casos foco frecuentes en donde se conoce totalmente el entorno a prior y el agente no necesita aprender, simplemente actúa en forma correcta;
PROPIEDADES
Apuntes del Mg. Gustavo E. Juárez
• Reactividad: Perciben estímulos de los sucesos que tienen lugar en el entorno y reaccionan ante ellos posiblemente para cambiar lo que ahí ocurre;
• Pro-actividad: el propio agente puede tener la iniciativa, y desencadenar una acción como consecuencia de una decisión propia;
• Cooperación: capacidad para asociarse con otros agentes para la consecución de sus objetivos. Esta cooperación puede necesitar del intercambio de información y representaciones de prerrequisitos para sistemas multiagente;
• Movilidad: capacidad para desplazarse a sistemas remotos, para el acceso a recursos, para llevar a cabo ciertas tareas, o para colaborar en otros agentes;
• Veracidad: no comunican información falsa a propósito, salvo que sean diseñados con este objetivo particular;
PROPIEDADES
Apuntes del Mg. Gustavo E. Juárez
• Veracidad: no comunican información falsa a propósito, salvo que sean diseñados con este objetivo particular;
• Operación asíncrona: el agente puede ejecutar tareas totalmente desacoplado de otros agentes, lo que significa que puede ser disparado por la ocurrencia de un evento particular;
-Sociabilidad (comunicación): capacidad para interaccionar con otros agentes, sistemas o personas, utilizando para ello un lenguaje de comunicación entre agentes;
-Adaptativo (aprendizaje): cambia su comportamiento basado en las experiencias previas.
PROPIEDADES
Apuntes del Mg. Gustavo E. Juárez
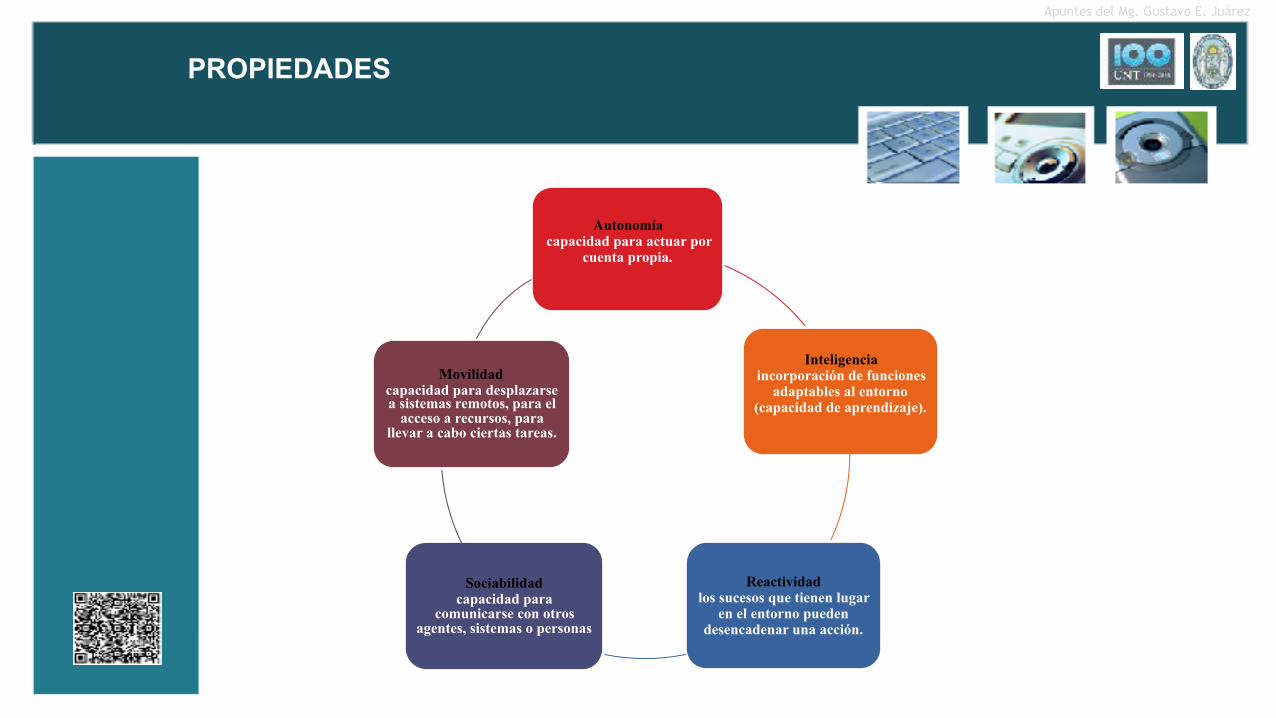
Autonomía capacidad para actuar por
cuenta propia.
Inteligencia incorporación de funciones
adaptables al entorno (capacidad de aprendizaje).
Reactividad los sucesos que tienen lugar
en el entorno pueden desencadenar una acción.
Sociabilidad capacidad para
comunicarse con otros agentes, sistemas o personas
Movilidad capacidad para desplazarse a sistemas remotos, para el
acceso a recursos, para llevar a cabo ciertas tareas.
PROPIEDADES
Apuntes del Mg. Gustavo E. Juárez
De acuerdo a como se combinen las características de los agentes y en función del caso de estudio cuales seas las que tengan mayor énfasis, los agentes se clasifican en:
• Agentes de Reflejo Simple
• Agentes Bien Informado
• Agentes Basados en Metas
• Agentes Basado en Utilidad
• Agentes con Capacidad de Aprendizaje
TIPIFICACIÓN
Apuntes del Mg. Gustavo E. Juárez
Todos los agentes son movidos por tendencias. Algunas de ellas pueden provenir
de su entorno mientras que otras son internas de los agentes En el primer caso
se habla de agentes reflejos simples (Simple-Reflex Agent: SRA).
Una salida elegante a esta explosión en tamaño es recurrir a reglas de condición-
acción, tan utilizadas desde la década del 70 en la representación del
conocimiento en Sistemas Expertos, del tipo:
if <condición> then <acción>
TIPOLOGIA: AGENTES DE REFLEJO SIMPLE
TIPOLOGIA: AGENTES DE REFLEJO SIMPLE
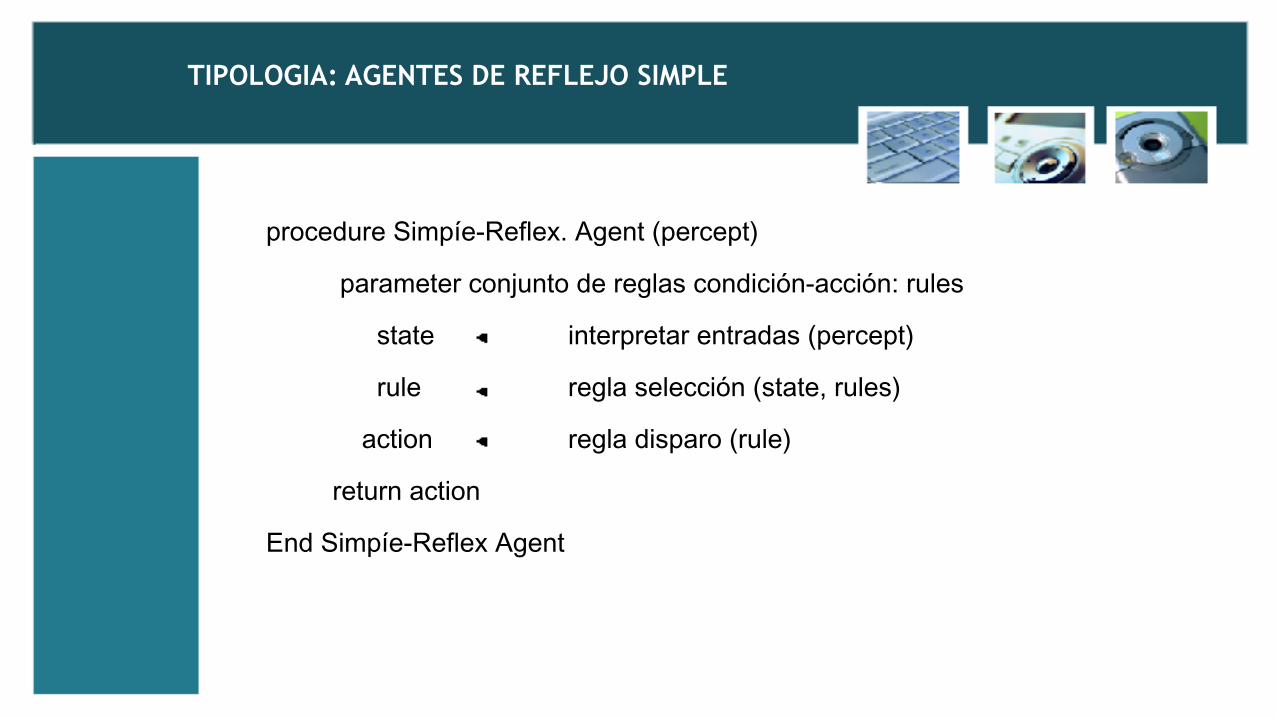
procedure Simpíe-Reflex. Agent (percept)
parameter conjunto de reglas condición-acción: rules
state interpretar entradas (percept)
rule regla selección (state, rules)
action regla disparo (rule)
return action
End Simpíe-Reflex Agent
TIPOLOGIA: AGENTES DE REFLEJO SIMPLE
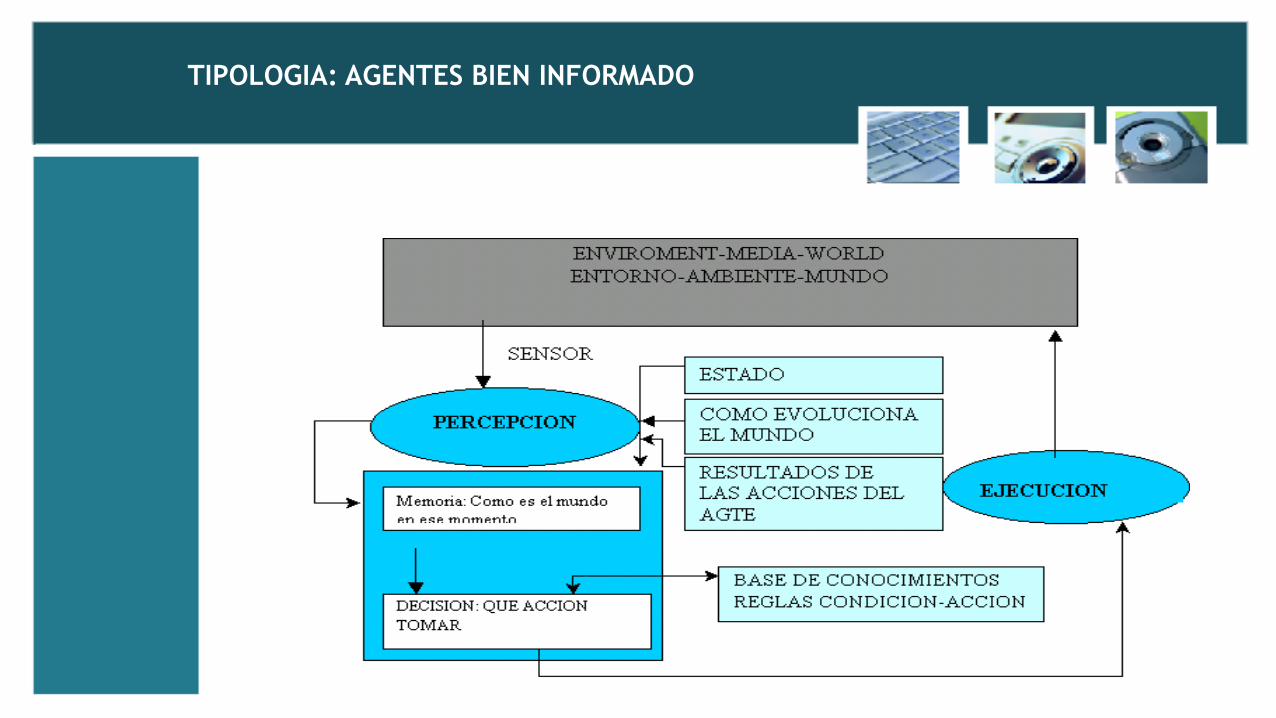
La actualización del estado interno en función del tiempo lleva a incluir dos
tipos de conocimiento en el programa del agente:
1) Información relativa a cómo evoluciona el mundo independiente del
agente.
2) Información relativa a cómo afectan al mundo las acciones del agente.
Estos agentes reciben el nombre de agentes bien informados o agentes reflejos
con estado (Reflex-Ageflt-With-State RAWS). En las Fig 1.5 y 1.6 se muestran su
esquema y programa, respectivamente.
TIPOLOGIA: AGENTES BIEN INFORMADO
TIPOLOGIA: AGENTES BIEN INFORMADO
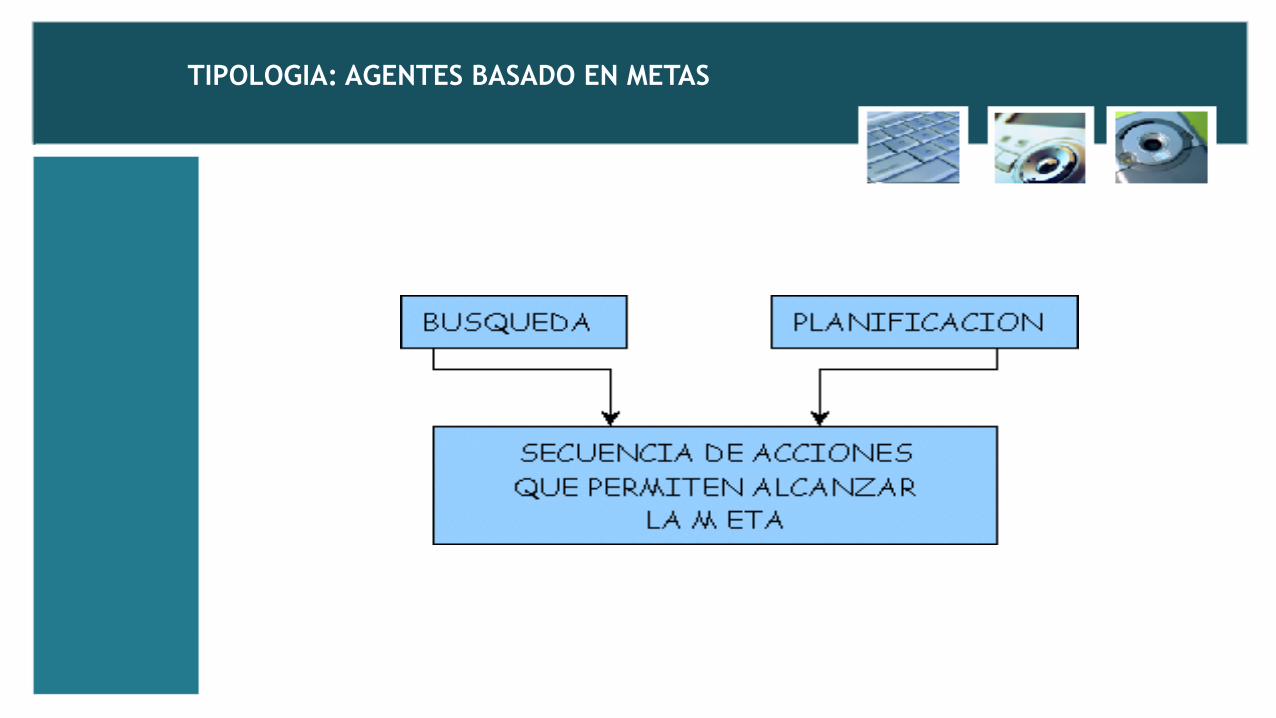
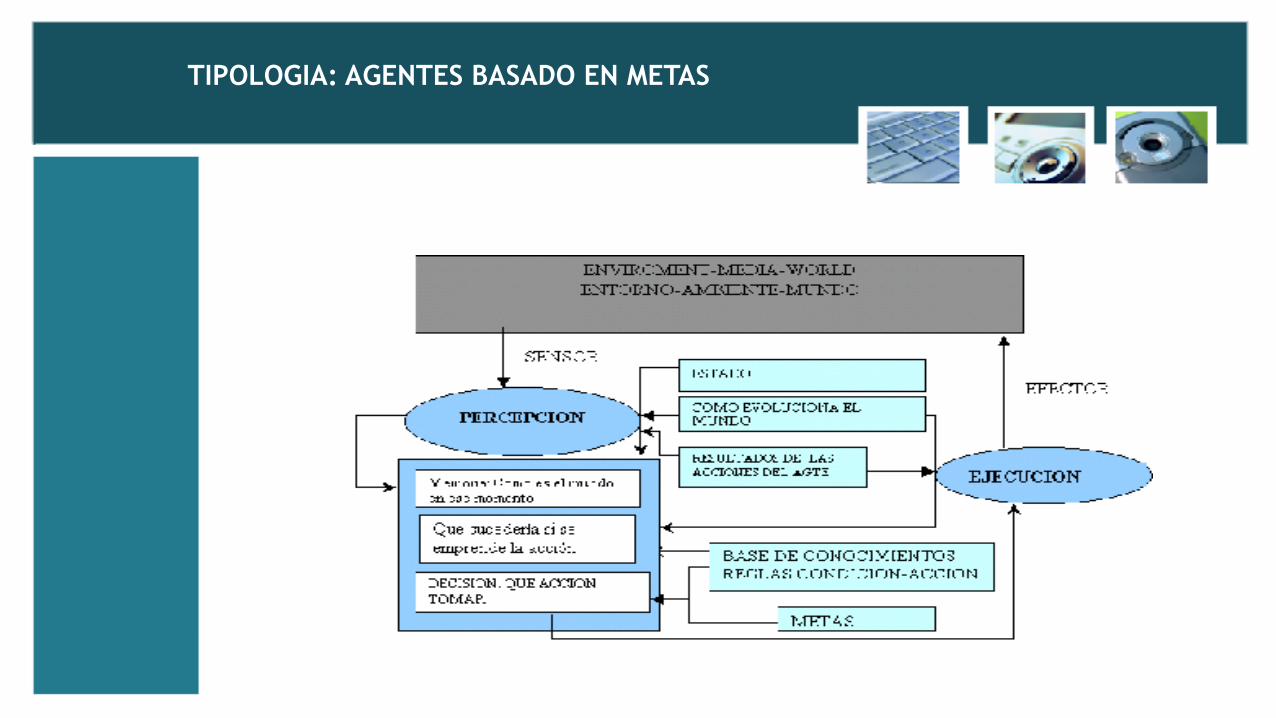
Muchas veces no basta con el conocimiento del estado del entorno para tomar
decisiones. Con frecuencia se encuentran situaciones donde es imprescindible
tener en cuenta la meta, entonces se pide que el agente concilie las
características de un agente bien informado con los resultados de posibles
acciones a encarar, permitiéndole refinar el método de alcanzar una meta.
TIPOLOGIA: AGENTES BASADO EN METAS
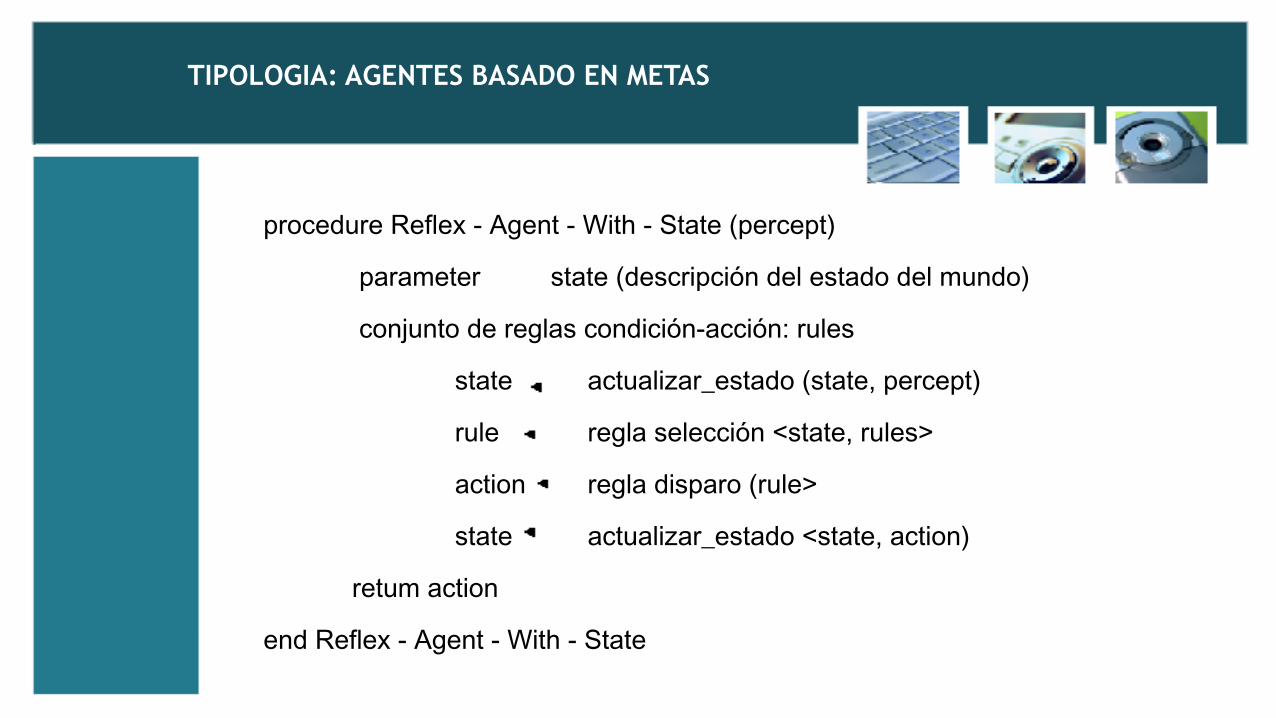
procedure Reflex - Agent - With - State (percept)
parameter state (descripción del estado del mundo)
conjunto de reglas condición-acción: rules
state actualizar_estado (state, percept)
rule regla selección <state, rules>
action regla disparo (rule>
state actualizar_estado <state, action)
retum action
end Reflex - Agent - With - State
TIPOLOGIA: AGENTES BASADO EN METAS
TIPOLOGIA: AGENTES BASADO EN METAS
TIPOLOGIA: AGENTES BASADO EN METAS
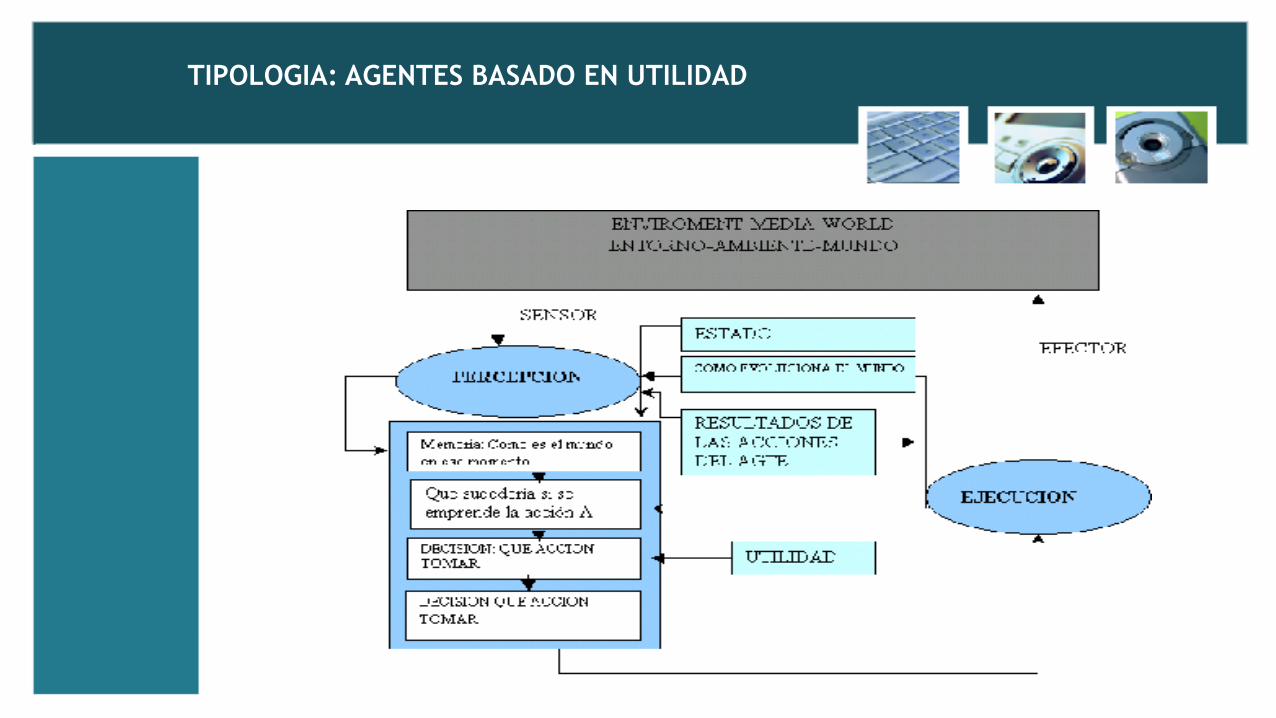
La utilidad de un agente es una función que cuantifica el grado de satisfacción
con un numero real, caracterizador del grado de satisfacción del agente.
Una especificación de la función de utilidad permite que un agente resuelva
problemas encontrados en la solución obtenida, como ocurre en los siguientes
casos:
• Cuando la consecución de una meta implica conflictos entre parámetros
del sistema
• Cuando existen simultáneamente varias metas que el agente deba
satisfacer
TIPOLOGIA: AGENTES BASADO EN UTILIDAD
TIPOLOGIA: AGENTES BASADO EN UTILIDAD
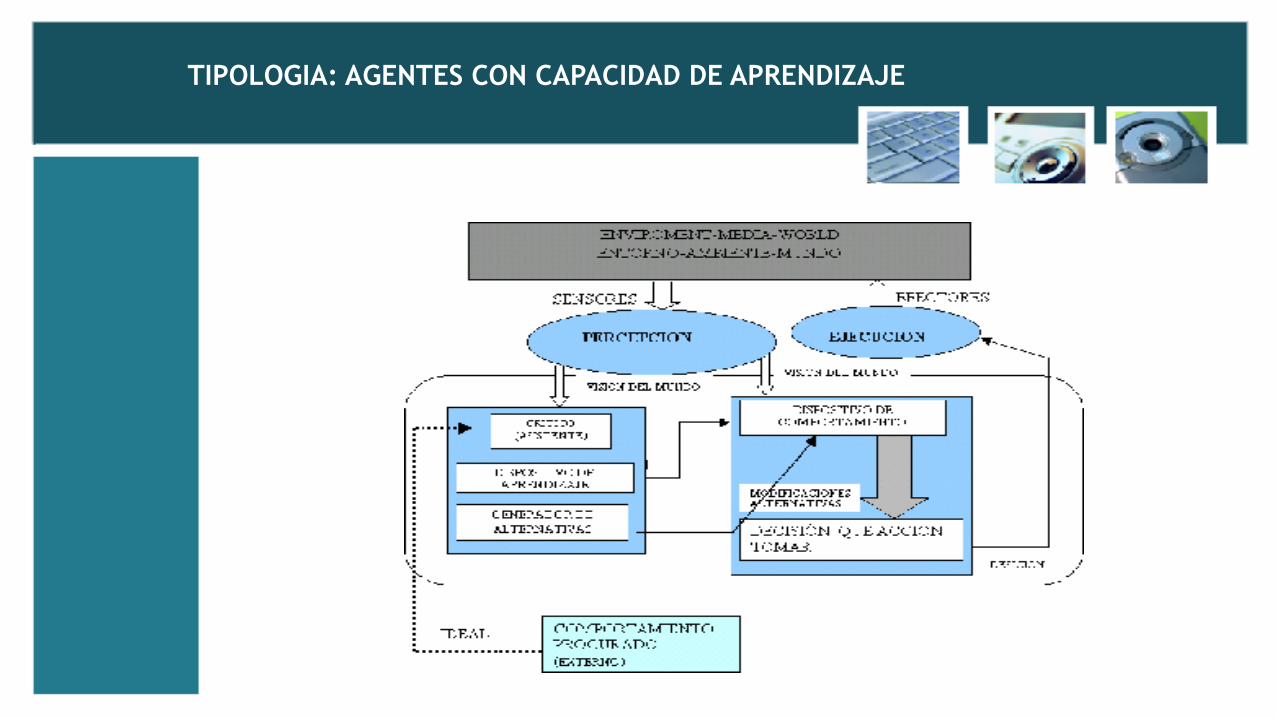
Hasta el momento se analizaron variantes que no poseían une estructura con
capacidad de aprender. Al plantearse esta necesidad se propone un agente que
difiere un tanto de la propuesta de Russell-Norvig [1]. En el esquema se muestra
un esquema de esta estructura, notándose en ella dos módulos:
I. Módulo Ejecutor (ME)
II. Él Módulo Aconsejador MA)
TIPOLOGIA: AGENTES CON CAPACIDAD DE APRENDIZAJE

El Módulo Ejecutor integra elementos típicos de los agentes en su estructura interna,
teniendo especial cuidado con el efecto que sobre ellos produce el Modulo Aconsejador
mediante las líneas modificaciones y modificaciones alternativas.
La visión del mundo que percibe el agente a través de sus sensores puede ser una visión
parcial. Esta situación podría causar errores significativos, debida a que las señales
generadas por el ENTORNO (llevadas a través de una línea multivaluada a los
SENSORES) no resulten una muestra significativa del estado de dicho MEDIO.
TIPOLOGIA: AGENTES CON CAPACIDAD DE APRENDIZAJE
TIPOLOGIA: AGENTES CON CAPACIDAD DE APRENDIZAJE
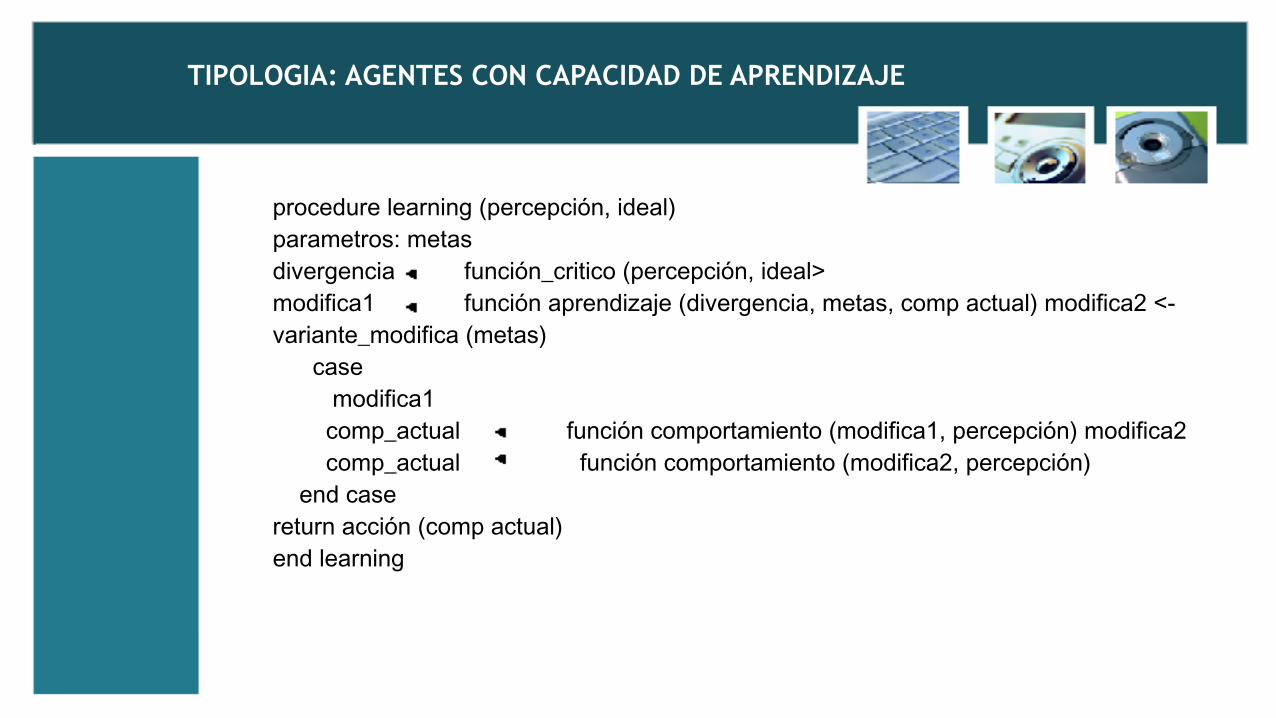
procedure learning (percepción, ideal) parametros: metas divergencia función_critico (percepción, ideal> modifica1 función aprendizaje (divergencia, metas, comp actual) modifica2 <- variante_modifica (metas) case modifica1 comp_actual función comportamiento (modifica1, percepción) modifica2 comp_actual función comportamiento (modifica2, percepción) end case return acción (comp actual) end learning
TIPOLOGIA: AGENTES CON CAPACIDAD DE APRENDIZAJE
Definición:
“En cada posible secuencia de percepciones, un Agente Racional deberá
emprender aquella que supuestamente maximice su medida de rendimiento,
basándose en las evidencias aportadas por la secuencia de percepciones y en el
conocimiento que el agente mantiene almacenado”.
RACIONALIDAD
Apuntes del Mg. Gustavo E. Juárez
Medidas de Rendimiento
Las medidas de rendimiento son aquellas que incluyen los criterios que
determinan el éxito en el comportamiento de un Agente.
Cuando se sitúa un agente en un medio, este genera una secuencia de
acciones de acuerdo a las percepciones que recibe.
Esta secuencia de acciones hace que su hábitat pase por una secuencia de
estados.
RACIONALIDAD Y RENDIMIENTO
Apuntes del Mg. Gustavo E. Juárez
Factores de la Racionalidad
• La medida de Rendimiento que define el criterio de éxito.
• El conocimiento acumulado del medio en el que habita el agente (Trazabilidad).
• Las acciones que el agente puede llevar a cabo.
• La secuencia de Percepciones del agente hasta el momento.
RACIONALIDAD - FACTORES
CASO DE ESTUDIO 1
VEHICULOS AUTOCONDUCIDOS
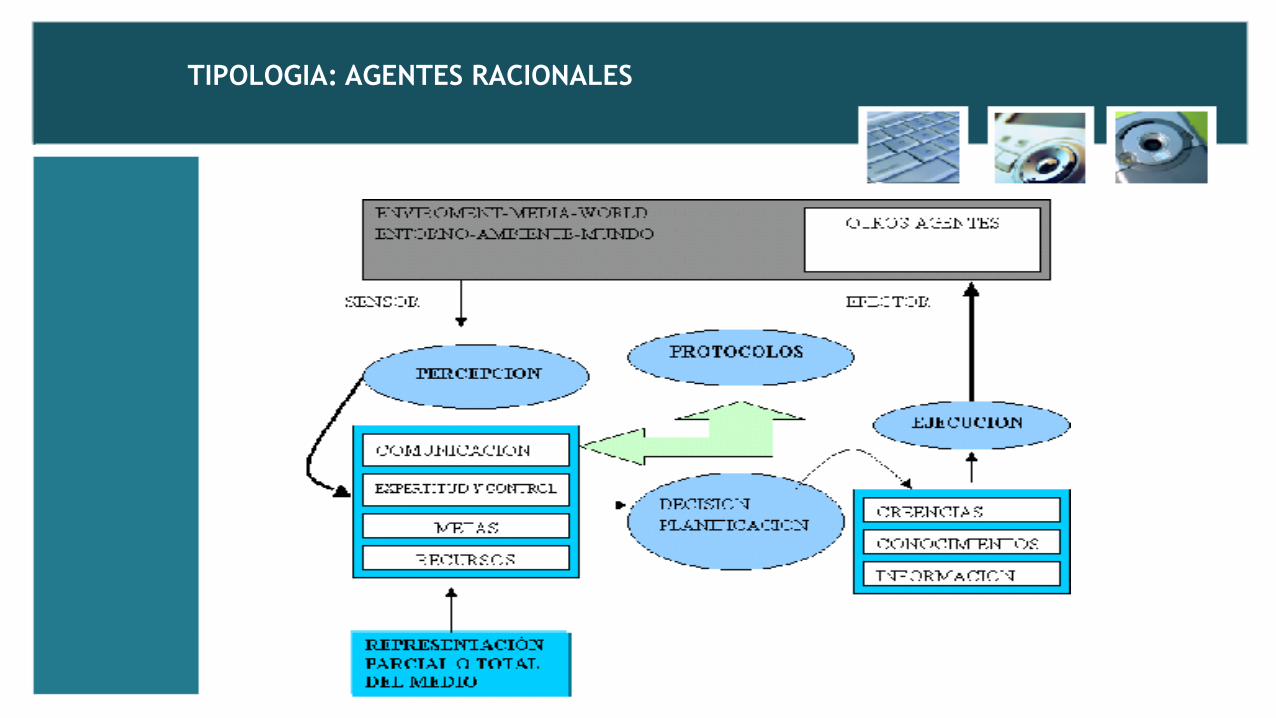
TIPOLOGIA: AGENTES RACIONALES
Dentro del paradigma de agentes, existe el concepto de Sistemas Multiagente (SMA), sistemas en los cuales varios agentes inteligentes, interactuan y persiguen un conjunto de objetivos o realizan un conjunto de tareas.
Un sistema multiagente requiere:
• Dos o mas agentes
• Al menos un agente autónomo
• Al menos una relación entre dos agentes donde uno satisface el objetivo del otro
Apuntes del Mg. Gustavo E. Juárez
SISTEMAS MULTIAGENTES

Caso de Estudio: VEHICULO DE GOOGLE
ENTORNO Y PERCEPCIONES DEL AGENTE
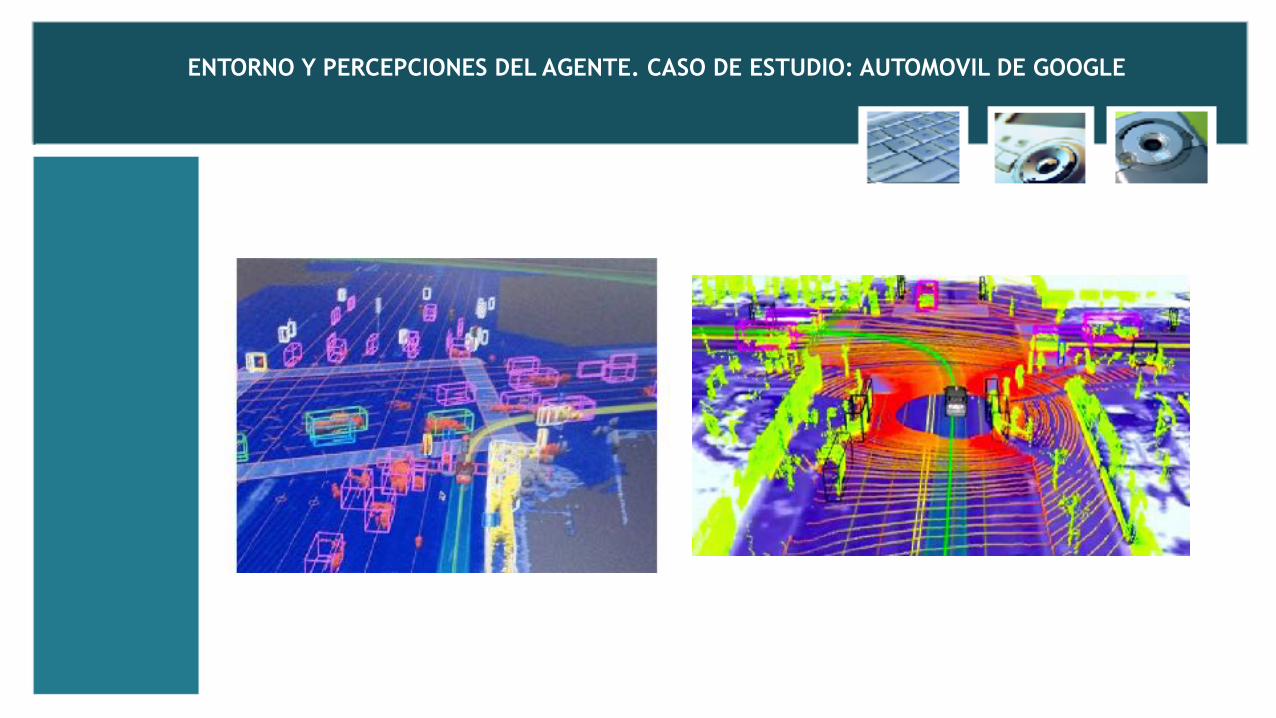
ENTORNO Y PERCEPCIONES DEL AGENTE. CASO DE ESTUDIO: AUTOMOVIL DE GOOGLE
Elementos
Cuando analizamos el entorno de trabajo del agente, es posible observar
elementos que se presentan de manera recurrente:
• Medidas de Rendimiento
• Entorno
• Actuadores
• Sensores
REAS
ESPECIFICACIONES DEL ENTORNO DE TRABAJO
Apuntes del Mg. Gustavo E. Juárez
CASO DE ESTUDIO: ENTORNO DE UN TAXISTA
Dentro de las cualidades deseables para un agente de este tipo se puede enunciar
las siguientes:
• Que llegue al destino correcto.
• Que minimice el consumo de combustible
• Que minimice el tiempo de viaje
• Que minimice el numero de infracciones de transito
• Que maximice la seguridad y la comodidad del pasajero
ENTORNO Y PERCEPCIONES DEL AGENTE
Apuntes del Mg. Gustavo E. Juárez
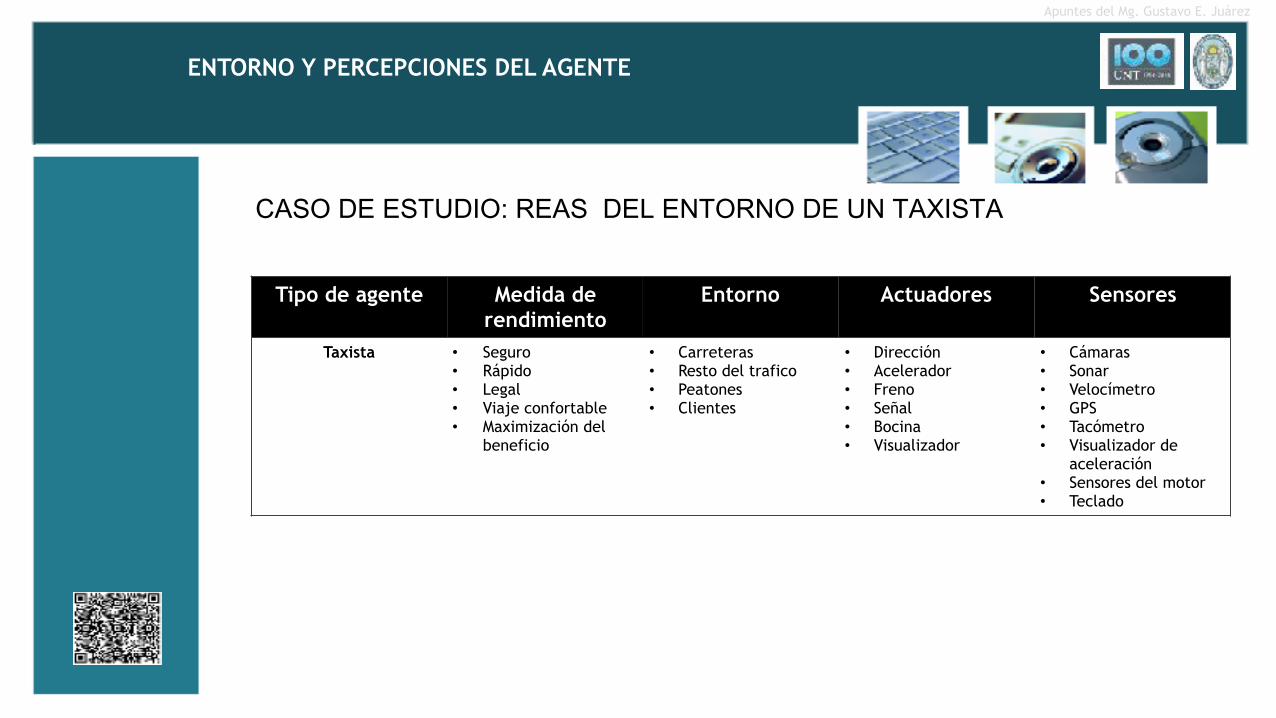
CASO DE ESTUDIO: REAS DEL ENTORNO DE UN TAXISTA
Tipo de agente Medida de rendimiento
Entorno Actuadores Sensores
Taxista • Seguro • Rápido • Legal • Viaje confortable • Maximización del
beneficio
• Carreteras • Resto del trafico • Peatones • Clientes
• Dirección • Acelerador • Freno • Señal • Bocina • Visualizador
• Cámaras • Sonar • Velocímetro • GPS • Tacómetro • Visualizador de
aceleración • Sensores del motor • Teclado
ENTORNO Y PERCEPCIONES DEL AGENTE
Apuntes del Mg. Gustavo E. Juárez
CASO DE ESTUDIO: PRACTICA CON EL ENTORNO DE UN TAXISTA
Desarrolle 10 reglas que integren los elementos contenidos en el REAS del
entorno del taxista y que garanticen las cualidades deseables para este caso de
estudio.
ENTORNO Y PERCEPCIONES DEL AGENTE
Apuntes del Mg. Gustavo E. Juárez
Hay muchas formas de combinar las propiedades que hemos establecido como
características de los agentes; dependiendo de en cuáles se haga mayor énfasis,
obtendremos una clasificación diferente.
A pesar de que cada una de ellas será, hasta cierto punto al menos, tendenciosa,
optaremos por adoptar una más o menos aceptada; en este caso la de Nwana.
TIPOLOGIA
Apuntes del Mg. Gustavo E. Juárez
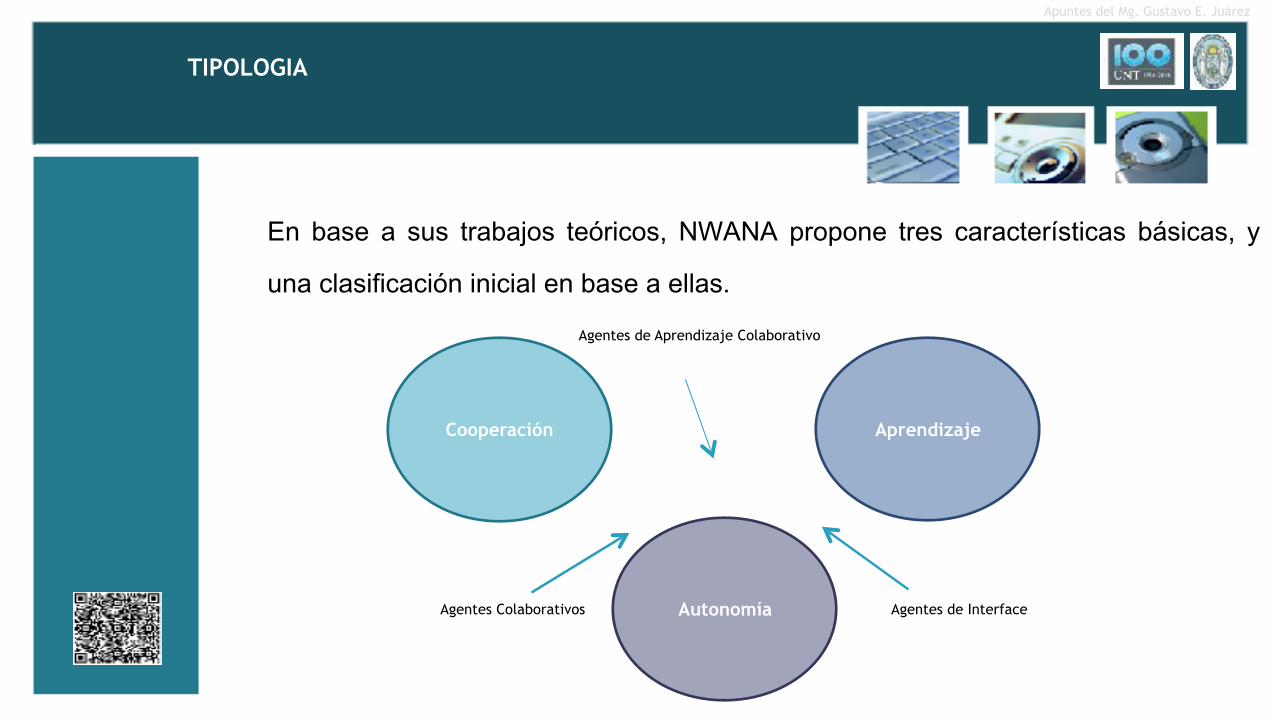
En base a sus trabajos teóricos, NWANA propone tres características básicas, y
una clasificación inicial en base a ellas.
Cooperación Aprendizaje
Autonomía
Agentes de Aprendizaje Colaborativo
Agentes de InterfaceAgentes Colaborativos
TIPOLOGIA
Apuntes del Mg. Gustavo E. Juárez
CASO DE ESTUDIO 2
FIRA - FUTBOL DE ROBOTS
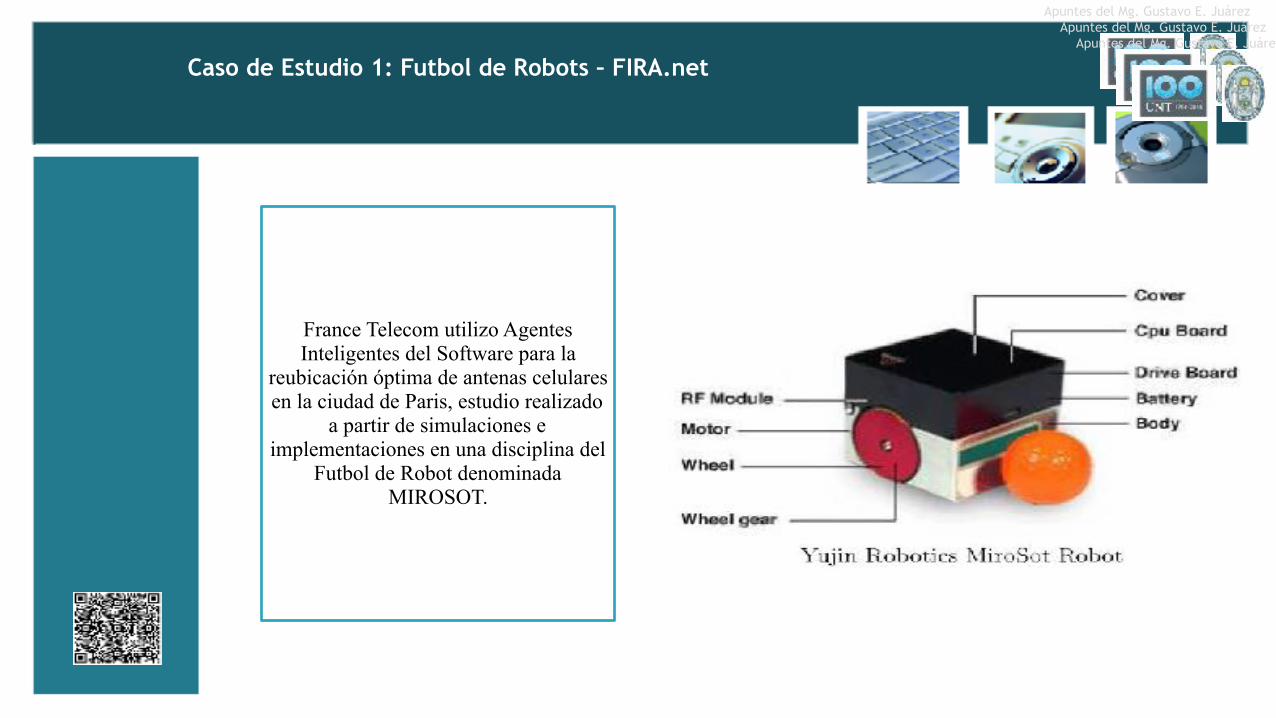
France Telecom utilizo Agentes Inteligentes del Software para la
reubicación óptima de antenas celulares en la ciudad de Paris, estudio realizado
a partir de simulaciones e implementaciones en una disciplina del
Futbol de Robot denominada MIROSOT.
Caso de Estudio 1: Futbol de Robots – FIRA.net
Apuntes del Mg. Gustavo E. Juárez Apuntes del Mg. Gustavo E. Juárez
Apuntes del Mg. Gustavo E. Juárez

Caso de Estudio 1: Futbol de Robots – FIRA.net
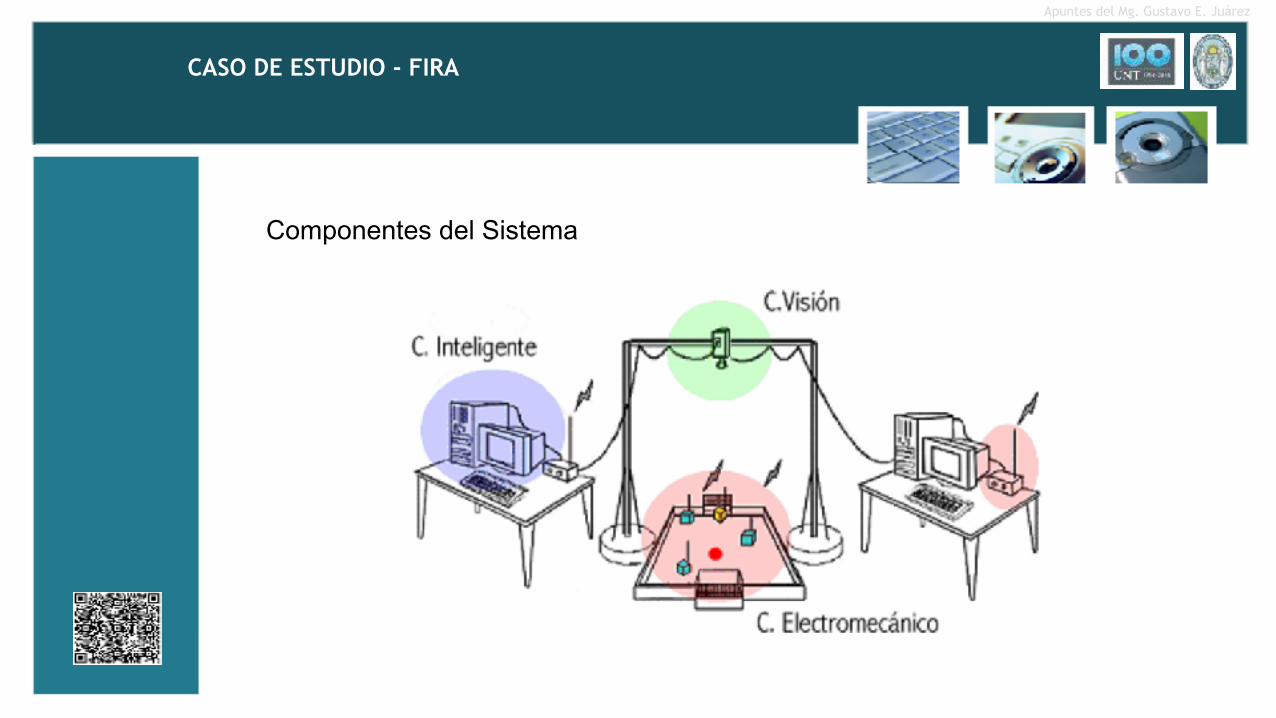
Componentes del Sistema
Apuntes del Mg. Gustavo E. Juárez
CASO DE ESTUDIO - FIRA
Los Agentes inteligentes que juegan al fútbol permiten usar el simulador SIMUROSOT. Deben definirse cuales son las condiciones del entorno operativo del dispositivo con la que el agente va a desarrollar sus tareas. En el caso del fútbol de robot, de cada robot de nuestro equipo se espera:
• eficiencia en cuanto a su movimiento el cual se traduce a una minimización del consumo de energía
• reducir el numero de colisiones con los obstáculos para preservar la integridad de la electrónica del robot
• rapidez en sus acciones pero sin perder estabilidad • que cumpla con sus objetivos satisfactoriamente.
CASO DE ESTUDIO - FIRA
Apuntes del Mg. Gustavo E. Juárez
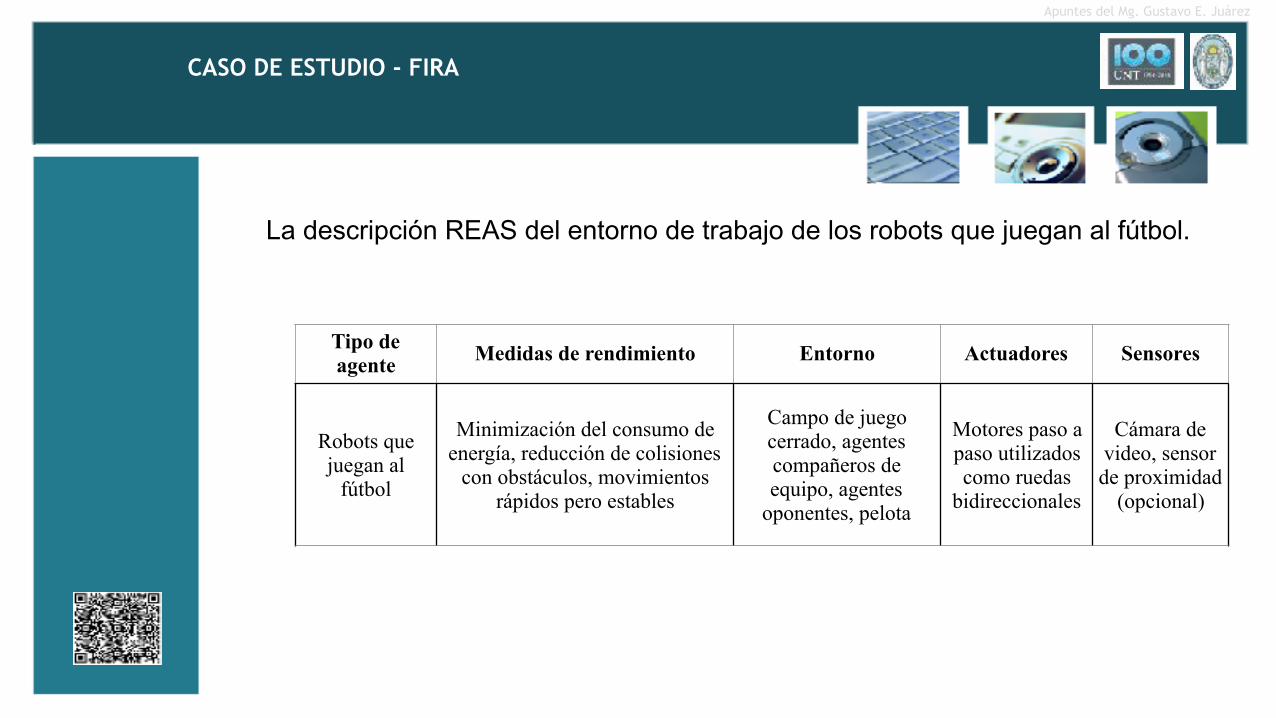
La descripción REAS del entorno de trabajo de los robots que juegan al fútbol.
Apuntes del Mg. Gustavo E. Juárez
Tipo de agente Medidas de rendimiento Entorno Actuadores Sensores
Robots que juegan al
fútbol
Minimización del consumo de energía, reducción de colisiones
con obstáculos, movimientos rápidos pero estables
Campo de juego cerrado, agentes compañeros de equipo, agentes
oponentes, pelota
Motores paso a paso utilizados como ruedas
bidireccionales
Cámara de video, sensor de proximidad
(opcional)
CASO DE ESTUDIO - FIRA
Propiedades del entorno de trabajo
Apuntes del Mg. Gustavo E. Juárez
CASO DE ESTUDIO - FIRA
-Totalmente observable: los sensores de los agentes le proporcionan acceso al estado completo del entorno en cada momento, es decir que detectan todos los aspectos que son relevantes a la hora de tomar decisiones (posición de la pelota, posición del oponente, etc.);
-Determinista: ya que el siguiente estado del medio esta totalmente determinado por el estado actual y la acción ejecutada por los agentes. El medio es estratégico ya que es determinista excepto para las acciones de los otros agentes;
-Secuencial: la decisión presente puede afectar las decisiones futuras;
Propiedades del entorno de trabajo - Continuación
Apuntes del Mg. Gustavo E. Juárez
CASO DE ESTUDIO - FIRA
-Dinámico: el entorno puede cambiar mientras el agente esta deliberando o realizando una acción sobre su medio;
-Continuo: esta propiedad depende de la forma en la que se maneja el tiempo y a las percepciones y acciones del agente. En el caso del futbol de robots, las computadoras que procesan la información de la cámara de video y que toma las decisiones de cada agente lo hace como mínimo 24 veces por segundo, que es el mismo retardo que tiene el ojo humano, por lo que se podría considerar como tiempo real;
-Multiagente: ya que cada agente debe tratar con otros agentes de un mismo equipo para lograr conseguir metas en común. P
SENSORES
En el caso del simulador de futbol de robots los sensores están emulados y entrega los agentes la siguiente información:
• Posición de nuestros robots: permite conocer las posiciones de cada robot. En las coordenadas (x, y) se toma el centro del robot como referencia de la posición.
• Posición de robots oponentes: es importante saber las ubicaciones del resto de los robots para predecir sus movimientos y para evitar las colisiones.
Apuntes del Mg. Gustavo E. Juárez
CASO DE ESTUDIO - FIRA
• Rotación de los robots: permite conocer el ángulo de orientación del robot. Este dato puede es útil para calcular la trayectoria de sus movimientos.
• Posición de la pelota: es el dato mas importante ya que con el se puede tomar decisiones sobre que acción debe tomar cada robot (patear, bloquear, etc.).
• Dimensiones de la cancha: determina los límites del campo de juego y la ubicación del arco tanto de nuestro equipo como el del oponente. Con este dato es posible saber, por ejemplo, hacia donde se debe hacer el gol.
Apuntes del Mg. Gustavo E. Juárez
CASO DE ESTUDIO - FIRA
ACTUADORES
Una de las caracteristicas importantes a saber es la relacion entre el valor que se establece para la velocidad de las ruedas que acepta el simulador (valores comprendidos entre -125 y 125) y la velocidad real del robot (medida en pulgadas/segundo).
Si bien las especificaciones del simulador solamente especifica el rango de valores aceptados para las velocidades de las ruedas, no establece en que undidades estan medidas, es decir que son adimensionales. Esta cuestion constituye un problema a la hora de relacionar distancias reales dentro del entorno con las velocidades asignadas a las ruedas de nuestro robot.
Apuntes del Mg. Gustavo E. Juárez
CASO DE ESTUDIO - FIRA
Actuadores
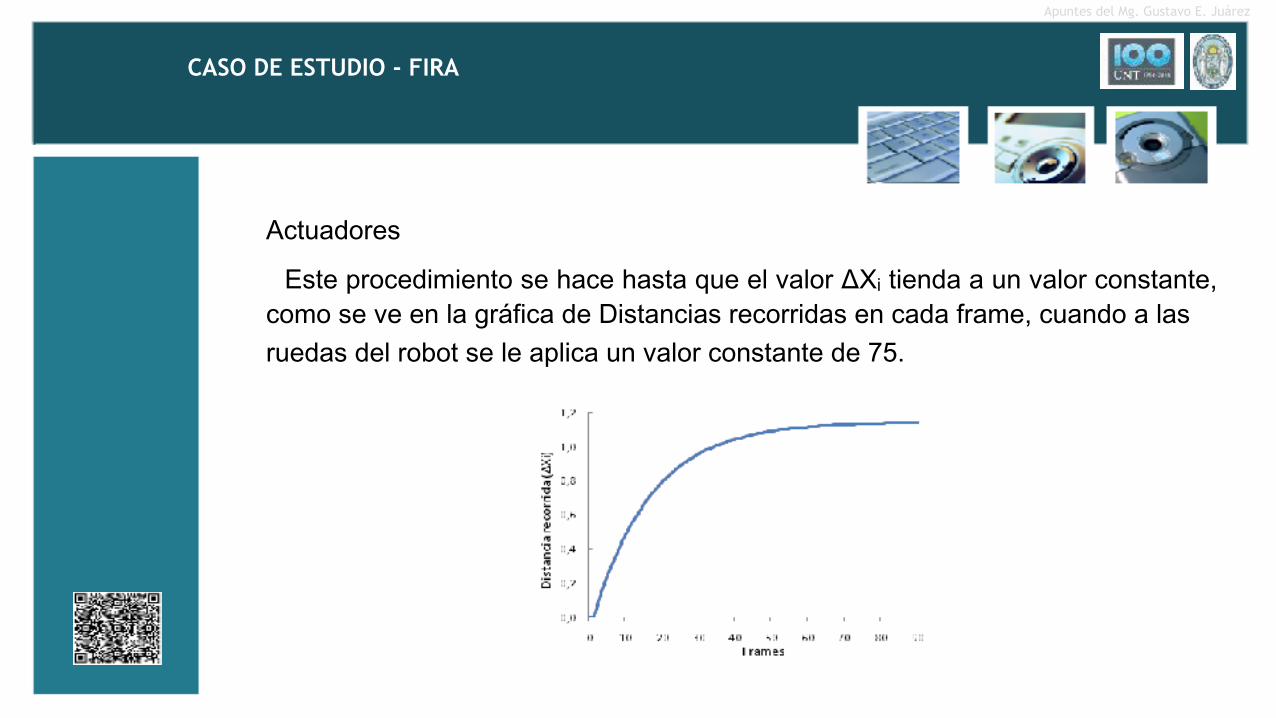
Este procedimiento se hace hasta que el valor ΔXi tienda a un valor constante, como se ve en la gráfica de Distancias recorridas en cada frame, cuando a las ruedas del robot se le aplica un valor constante de 75.
Apuntes del Mg. Gustavo E. Juárez
CASO DE ESTUDIO - FIRA
Actuadores
Como vemos en el instante inicial (frame 0), el robot está en reposo. A medida que pasa el tiempo el robot empieza a incrementar su velocidad hasta que en un momento dado la distancia recorrida entre cada frame se hace constante. Este valor al que tiende la grafica de la Figura 52, es la velocidad del robot medida en pulgadas/frame.
Del mismo modo, se midieron las distancias para distintos valores de las ruedas y se obtuvieron los siguientes resultados:
Apuntes del Mg. Gustavo E. Juárez
CASO DE ESTUDIO - FIRA
Actuadores
Apuntes del Mg. Gustavo E. Juárez
CASO DE ESTUDIO - FIRA
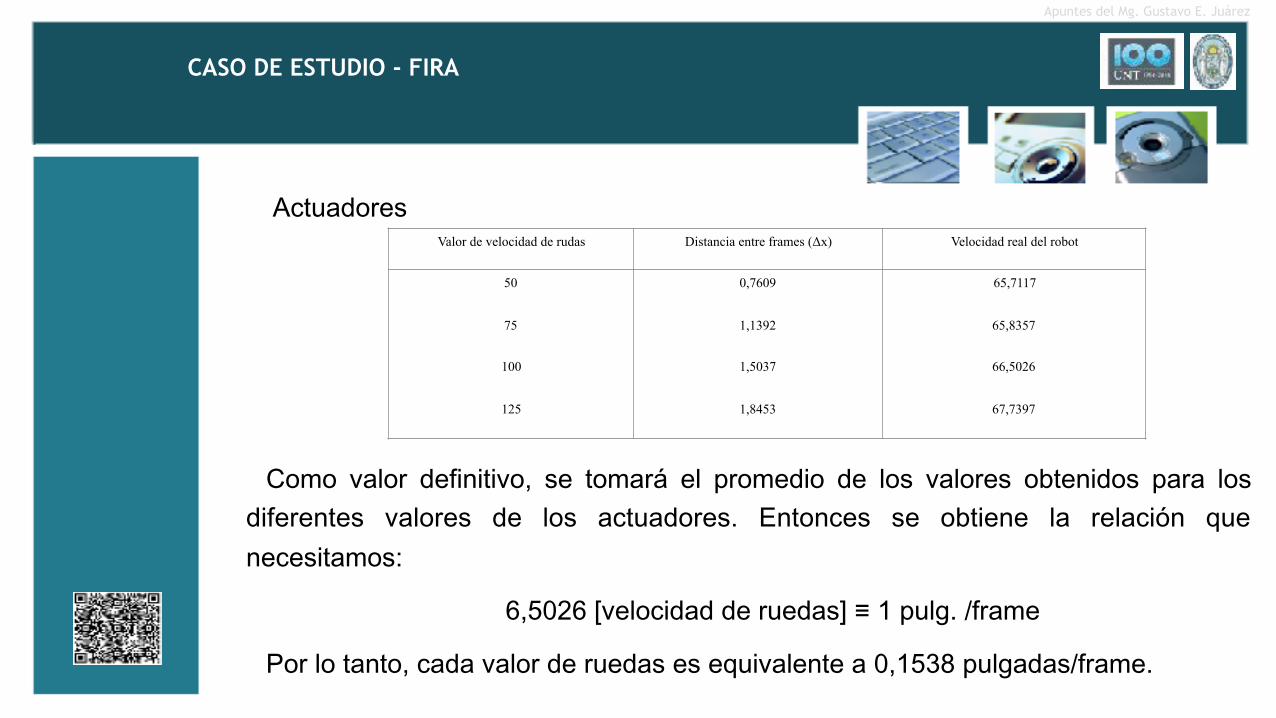
Valor de velocidad de rudas Distancia entre frames (Δx) Velocidad real del robot
50 0,7609 65,7117
75 1,1392 65,8357
100 1,5037 66,5026
125 1,8453 67,7397
Como valor definitivo, se tomará el promedio de los valores obtenidos para los diferentes valores de los actuadores. Entonces se obtiene la relación que necesitamos:
6,5026 [velocidad de ruedas] ≡ 1 pulg. /frame
Por lo tanto, cada valor de ruedas es equivalente a 0,1538 pulgadas/frame.
1. ANALISIS DEL MOVIMIENTO DE LOS ROBOTS
Antes de comenzar con el desarrollo de algorimos para el movimiento de los robot, se debe tener en claro las leyes que gobiernan este movimiento. Como se vio en secciones precedentes, los actuadores de nuestro robot son dos ruedas ubicadas una a cada lado del mismo, lo que posibilita 2 grados de libertad en el plano: uno de giro hacia la izquiera y derecha, y otro correspondiente al movimiento hacia adelante y atras
Apuntes del Mg. Gustavo E. Juárez
CASO DE ESTUDIO - FIRA
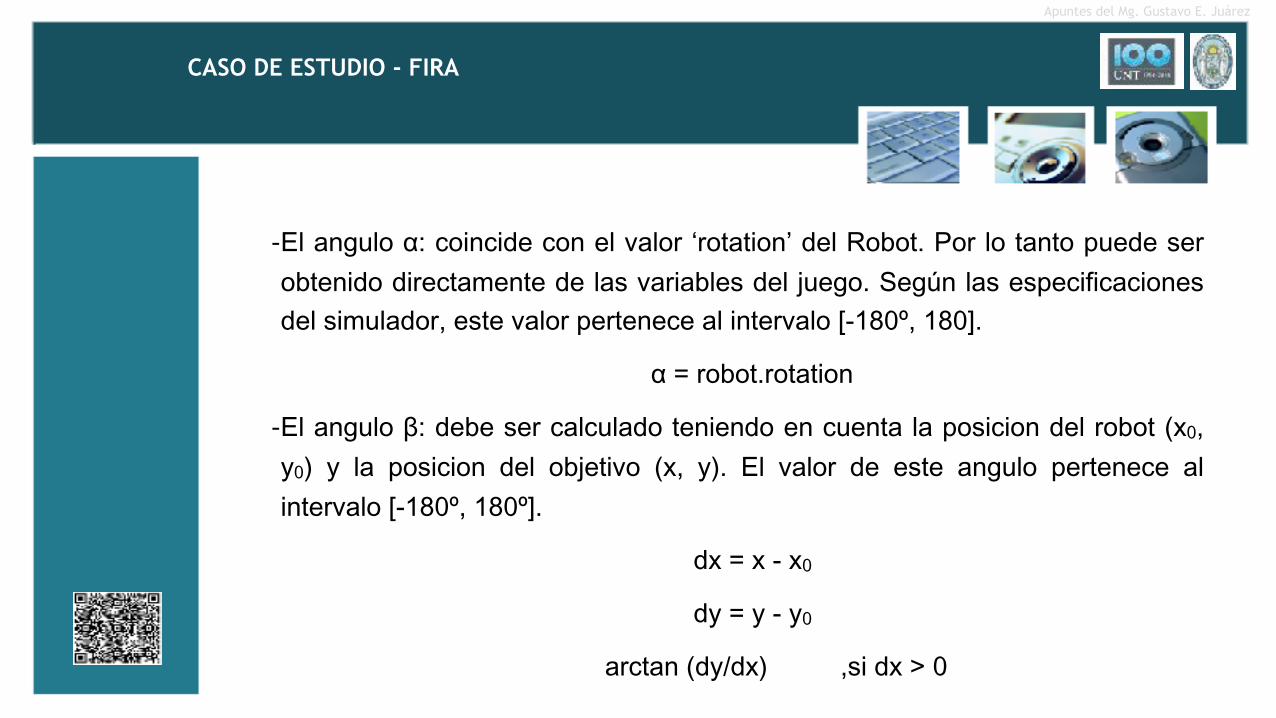
-El angulo α: coincide con el valor ‘rotation’ del Robot. Por lo tanto puede ser obtenido directamente de las variables del juego. Según las especificaciones del simulador, este valor pertenece al intervalo [-180º, 180].
α = robot.rotation
-El angulo β: debe ser calculado teniendo en cuenta la posicion del robot (x0, y0) y la posicion del objetivo (x, y). El valor de este angulo pertenece al intervalo [-180º, 180º].
dx = x - x0
dy = y - y0
arctan (dy/dx) ,si dx > 0
Apuntes del Mg. Gustavo E. Juárez
CASO DE ESTUDIO - FIRA
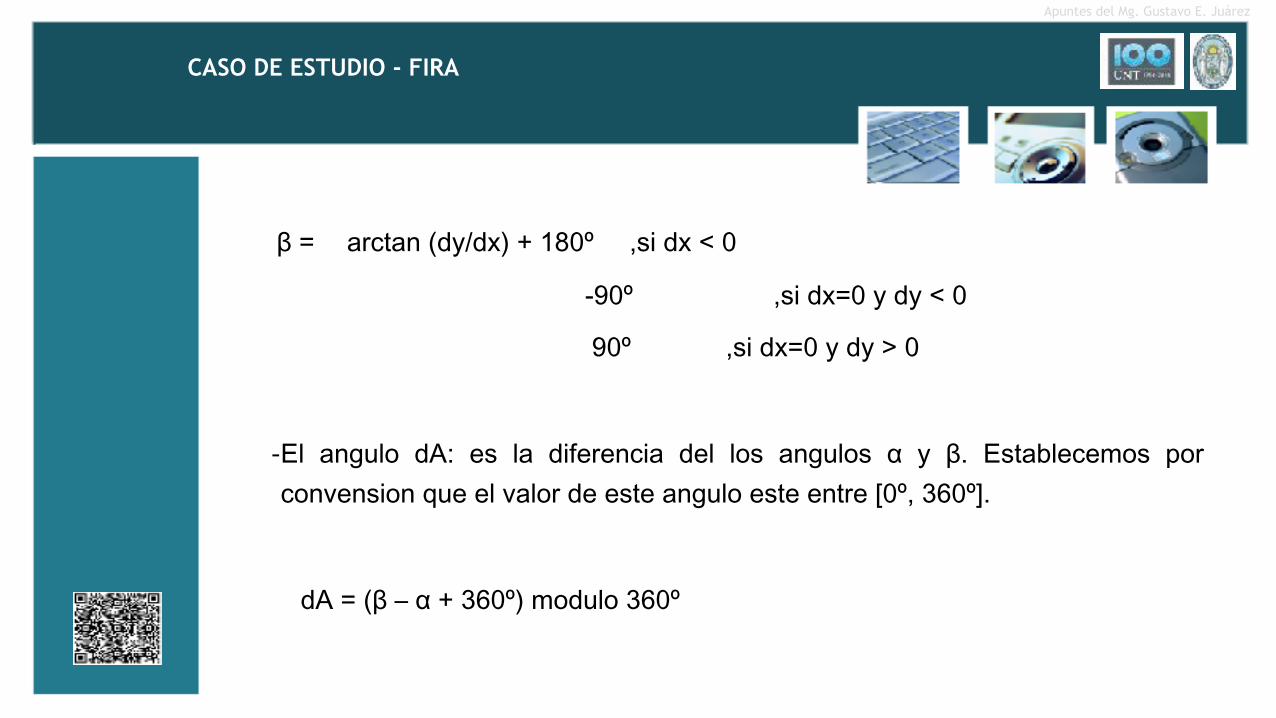
β = arctan (dy/dx) + 180º ,si dx < 0
-90º ,si dx=0 y dy < 0
90º ,si dx=0 y dy > 0
-El angulo dA: es la diferencia del los angulos α y β. Establecemos por convension que el valor de este angulo este entre [0º, 360º].
dA = (β – α + 360º) modulo 360º
Apuntes del Mg. Gustavo E. Juárez
CASO DE ESTUDIO - FIRA
Simurodot - R_Soccer_v15a
Este simulador desarrollado en Shockwave Flash, permite simular la competencia de futbol entre dos equipos de robots de cinco jugadores cada uno.
http://www.fira.net/contents/sub03/sub03_7.asp
http://www.fira.net/contents/data/Middle_League_SimuroSot_Program.exe
Apuntes del Mg. Gustavo E. Juárez
CASO DE ESTUDIO - FIRA
Foundation for Intelligent Physical Agents (FIPA) www.fipa.org
OMG Agent Special Interest Group (Agent SIG) http://www.objs.com/agent/index.html
Holonic Manufacturing Systems (HMS) Consortium hms.ifw.uni-hannover.de
ESTANDARIZACION: CONSORCIOS INTERNACIONALES
Apuntes del Mg. Gustavo E. Juárez
Control of Agent-Based System (CoABS) coabs.globalinfotek.com/
DARPA Agent Markup Language (DAML) www.daml.org
Java Agent Services (Sun JSR 000087) www.java-agent.org
Diseño e Implementación de una estrategia de juego para equipo de futbol de robots mediante definición de roles. Resolución de Problemas de Ingeniería. Simulación de Robot bajo entorno SIMUROSOT. (Jiménez, Víctor Adrián. Redondo, Aníbal Nicolás)
ESTANDARIZACION: EEUU
Apuntes del Mg. Gustavo E. Juárez Apuntes del Mg. Gustavo E. Juárez

Apuntes del Mg. Gustavo E. Juárez