improved method “grid translation” for mapping environmental pollutants using a two-dimensional...
TRANSCRIPT
Atmospheric Environment 38 (2004) 1801–1809
ARTICLE IN PRESS
*Correspond
E-mail addr
1352-2310/$ - se
doi:10.1016/j.at
Improved method ‘‘grid translation’’ for mappingenvironmental pollutants using a two-dimensional CAT
scanning system
Wim Verkruysse, Lori A. Todd*
Department of Environmental Sciences and Engineering, University of North Carolina at Chapel Hill, Chapel Hill, NC 27599, USA
Received 10 August 2003; accepted 24 November 2003
Abstract
This research reports on a new method that improves two-dimensional tomographic mapping of air pollutants. In
traditional reconstruction techniques, a single grid of cells was used to reconstruct a two-dimensional map from
measured line integrated open-path Fourier transform infrared (OP-FTIR) spectrometer measurements. Typically, in
environmental two-dimensional imaging, the area of interest is sparsely sampled with rays. As a result, the
reconstruction grid resolution has to be coarse in order to avoid grid cells that are hit by very few rays. Unfortunately,
successful reconstruction of a peak on a coarse grid depends on its position with respect to a grid cell. If it lies mostly
within one grid cell, the reconstructed peak value will be fairly accurate; if it overlaps two or more cells, the predicted
concentrations are lower. On average, this leads to an underestimation of the peak value, as well as a strong variability
when a peak changes location or when a different reconstruction resolution is selected. This paper presents a recently
developed ‘‘grid translation’’ method that allows the choice of the reconstruction resolution to be less critical than using
previous single grid methods. In addition, this method substantially improves the quantitative and qualitative
reconstruction accuracy of concentration maps under the configuration constraints of OP-FTIR CAT scanning
systems.
r 2004 Elsevier Ltd. All rights reserved.
Keywords: FTIR spectroscopy; Chemical imaging; Reconstruction; Computed tomography; Exposure assessment
1. Introduction
Current techniques for monitoring chemical emissions
indoors or outdoors use time-integrated or real-time
point sampling devices placed at specific and isolated
locations throughout an area. These isolated measure-
ments provide information only about chemicals emitted
at a specific time period and for a specific location. If
time-integrated methods are used, information concern-
ing short-term peaks of concentrations is lost. In any
case, data is confined to a small spatial region and
scientists are forced to estimate chemical concentrations
ing author. Fax: +1-919-966-4711.
ess: [email protected] (L.A. Todd).
e front matter r 2004 Elsevier Ltd. All rights reserve
mosenv.2003.11.039
in the unsampled regions. The isolated data points do
not provide an overall understanding of chemical
generation and transport over time and space.
An innovative method has been developed that
creates, in real-time, two-dimensional maps of chemical
contaminants in air. With these maps, scientists can
resolve the concentration and dispersion patterns of
multiple chemicals with good spatial and temporal
resolution. The technology used in this mapping method
combines the measurement techniques of optical remote
sensing with the mapping capabilities of computer-
assisted tomography (CAT) to provide accurate spatial
and temporal information about contaminant concen-
trations and dispersion patterns (Yost et al., 1994;
Drescher et al., 1996; Todd et al., 2001). CAT is best
d.

ARTICLE IN PRESSW. Verkruysse, L.A. Todd / Atmospheric Environment 38 (2004) 1801–18091802
known for its use in medicine (Hounsfield, 1973;
Cormack, 1964). The first discussions of applying CAT
to air pollution were by Byer and Shepp (1979) and
Wolfe and Byer (1979) who described a theoretical laser-
based system used on an urban scale. CAT was
proposed initially by Todd and Leith (1990) to measure
pollutants in indoor air and it has since been evaluated
in theoretical, experimental and outdoor field studies. It
has been deployed in the field to calculate emission rates
of ammonia from a 6-acre swine waste lagoon (Todd
et al., 2001). In theory, this method could be used to
map a variety of areas, from a small room up to an area
over 300 km on a side.
For environmental and industrial applications, open-
path Fourier transform infrared (OP-FTIR) spectro-
meters have been primarily used as the optical remote
sensing device in the system; however, other open-path
instruments such as tunable diode lasers could be used
as well (Warland et al., 2001). The OP-FTIR spectro-
meters scan the air in near-real time by non-invasively
sampling across a long open-space; each single beam of
infrared light probes the air, measuring the attenuation
of light from chemical contaminants and returns a path-
integrated concentration of chemicals. Thus, chemicals
are measured over a path, not at a single point.
With the use of multiple spectrometers, a non-invasive
network of intersecting path-integrated concentrations
are obtained, all within a horizontal slice of air in the
area of interest. Tomographic reconstruction algorithms
are used to transform the network of concentrations into
a spatially resolved, two-dimensional concentration map
over the plane that is sampled. The spatial resolution of
this environmental CAT scanning system enables non-
uniform sources to be measured. Each map provides a
snapshot, which represents a short period of measure-
ment (minutes), of the concentrations and locations of
multiple chemicals in air. As new maps are obtained
over time, the reconstructed concentration maps are
linked together to visualize the flow of contaminants
over both space and time. This provides a powerful tool
for evaluating chemical dispersion, emission and ex-
posure. These maps allow spatial and temporal resolu-
tion to be obtained using far fewer instruments than
would be necessary to obtain the same level of detail
using point sampling devices.
Ideally, to capture an accurate and spatially resolved
profile of concentrations, a high density of optical rays
would be taken simultaneously; the higher the density of
rays, the higher the reconstruction resolution. In
practice, with the current OP-FTIR spectrometer
technology, multiple optical rays are taken sequentially
in time over a given period. Therefore, for mapping
fluctuating chemical concentrations, because sequential
open-path measurements are obtained, the overall
sampling time must be kept to a minimum. This is
accomplished through a combination of limiting the
individual sampling time for a single ray and limiting the
number of total OP-FTIR spectrometer rays. This can
compromise both the accuracy and resolution of the
final concentration maps.
When the density of rays is sparse, a coarse (low
resolution) map is reconstructed. The resolution of a
map relates to the number of grid cells (or squares) that
a map contains which translates into the spatial
resolution of concentrations for an area. The higher
the number of grid cells in a map, the higher the spatial
resolution. When reconstructing chemical concentra-
tions, the selection of the spatial resolution has
depended upon the given application, the number of
optical rays and spectrometers, and the expected
chemical concentration profile. While the spatial resolu-
tion of a map depends on multiple factors, to accurately
reconstruct the concentrations in a grid cell, usually a
minimum of one or two OP-FTIR spectrometer rays
must cross the cell. The grid cell size is usually
determined by theoretical tests that include the para-
meters listed above. For practical purposes, a fixed
single grid cell size must be selected in order to
reconstruct the maps; however, a single grid cell size
can also impact the accuracy of some of the concentra-
tion estimates.
This paper presents a recently developed ‘‘grid
translation’’ method that allows the choice of the
reconstruction resolution to be less critical than using
previous methods. In addition, this method substantially
improves the quantitative and qualitative reconstruction
accuracy of concentration maps under the configuration
constraints of OP-FTIR CAT scanning systems. Results
using the grid translation method are compared with the
conventional single grid method by reconstructing test
maps from computer simulated concentration data using
the maximum likelihood with expectation maximization
(MLEM) algorithm. The reconstructed concentration
maps were evaluated using different quantitative mea-
sures of image quality.
2. Theory and methodology
2.1. Reconstruction algorithm
The MLEM tomographic reconstruction algorithm
was used in this study to reconstruct the path-integrated
measurements (Tsui et al., 1991; Shepp and Vardi, 1982;
Samanta and Todd, 2000). To reconstruct a concentra-
tion map, an idealized area was broken into an N�M
square or rectangular grid of cells. The concentration in
each cell was assumed to be homogeneous, non-
negative, and was updated with each iteration. Within
each grid cell, the MLEM algorithm iteratively updated
concentrations in the N�M grid cells by comparing a
set of measured path-integrated ray sums with a set of
ARTICLE IN PRESSW. Verkruysse, L.A. Todd / Atmospheric Environment 38 (2004) 1801–1809 1803
calculated path-integrated ray sums. The process was
terminated after a pre-determined number of iterations.
Fifty iterations were used for this research. The
calculated ray sums were obtained according to
Eq. (1). The concentrations Cqi were updated in each
iteration step according to Eq. (2).
pqj ¼
XN�M
i¼1
AijCqi ; ð1Þ
where Aij is the fractional area of the ith grid cell
intercepted by the jth measured ray sum, Cqi is the grid
cell concentration, N�M is the number of grid cells,
and pqj is the calculated ray sum.
Cqþ1i ¼
Cq
Pj Aij
Xj
Aij #pj
pqj
; ð2Þ
where #pj is the measured (actual) ray sum.
2.2. Optical remote sensing configuration
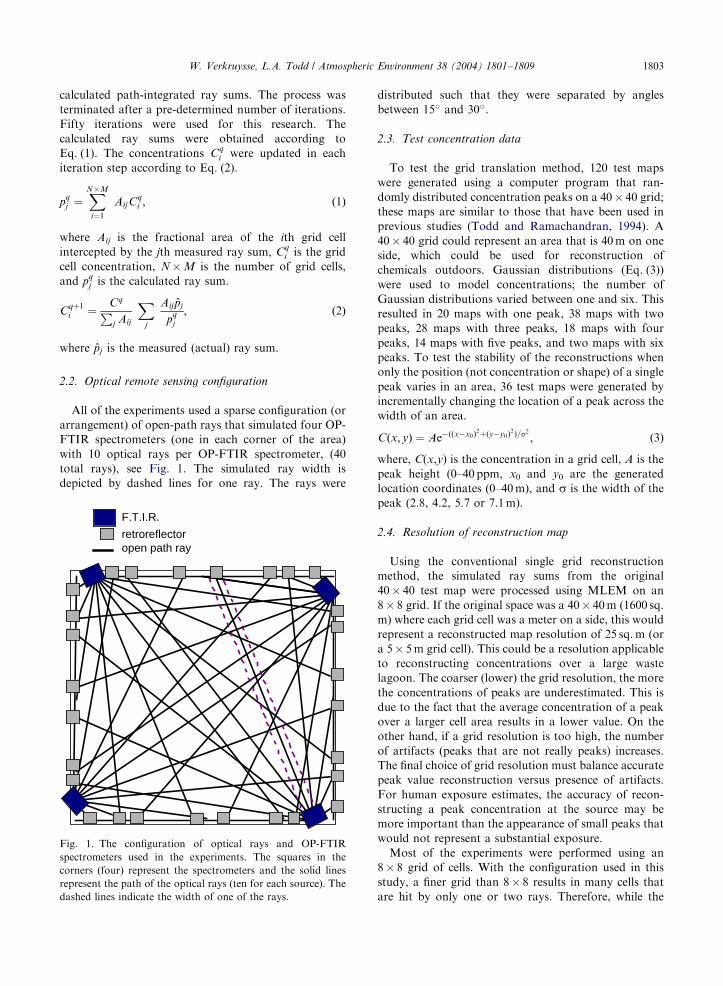
All of the experiments used a sparse configuration (or
arrangement) of open-path rays that simulated four OP-
FTIR spectrometers (one in each corner of the area)
with 10 optical rays per OP-FTIR spectrometer, (40
total rays), see Fig. 1. The simulated ray width is
depicted by dashed lines for one ray. The rays were
F.T.I.R.
retroreflectoropen path ray
Fig. 1. The configuration of optical rays and OP-FTIR
spectrometers used in the experiments. The squares in the
corners (four) represent the spectrometers and the solid lines
represent the path of the optical rays (ten for each source). The
dashed lines indicate the width of one of the rays.
distributed such that they were separated by angles
between 15� and 30�.
2.3. Test concentration data
To test the grid translation method, 120 test maps
were generated using a computer program that ran-
domly distributed concentration peaks on a 40� 40 grid;
these maps are similar to those that have been used in
previous studies (Todd and Ramachandran, 1994). A
40� 40 grid could represent an area that is 40 m on one
side, which could be used for reconstruction of
chemicals outdoors. Gaussian distributions (Eq. (3))
were used to model concentrations; the number of
Gaussian distributions varied between one and six. This
resulted in 20 maps with one peak, 38 maps with two
peaks, 28 maps with three peaks, 18 maps with four
peaks, 14 maps with five peaks, and two maps with six
peaks. To test the stability of the reconstructions when
only the position (not concentration or shape) of a single
peak varies in an area, 36 test maps were generated by
incrementally changing the location of a peak across the
width of an area.
Cðx; yÞ ¼ Ae�ððx�x0Þ2þðy�y0Þ
2Þ=s2
; ð3Þ
where, C(x,y) is the concentration in a grid cell, A is the
peak height (0–40 ppm, x0 and y0 are the generated
location coordinates (0–40m), and s is the width of the
peak (2.8, 4.2, 5.7 or 7.1m).
2.4. Resolution of reconstruction map
Using the conventional single grid reconstruction
method, the simulated ray sums from the original
40� 40 test map were processed using MLEM on an
8� 8 grid. If the original space was a 40� 40m (1600 sq.
m) where each grid cell was a meter on a side, this would
represent a reconstructed map resolution of 25 sq. m (or
a 5� 5 m grid cell). This could be a resolution applicable
to reconstructing concentrations over a large waste
lagoon. The coarser (lower) the grid resolution, the more
the concentrations of peaks are underestimated. This is
due to the fact that the average concentration of a peak
over a larger cell area results in a lower value. On the
other hand, if a grid resolution is too high, the number
of artifacts (peaks that are not really peaks) increases.
The final choice of grid resolution must balance accurate
peak value reconstruction versus presence of artifacts.
For human exposure estimates, the accuracy of recon-
structing a peak concentration at the source may be
more important than the appearance of small peaks that
would not represent a substantial exposure.
Most of the experiments were performed using an
8� 8 grid of cells. With the configuration used in this
study, a finer grid than 8� 8 results in many cells that
are hit by only one or two rays. Therefore, while the
ARTICLE IN PRESSW. Verkruysse, L.A. Todd / Atmospheric Environment 38 (2004) 1801–18091804
number of knowns (ray sums) are constant, the number
of unknowns (individual cell concentration values)
increases with a higher resolution. To investigate the
impact of the reconstruction grid cell resolution on each
method, a number of reconstructions were performed
using resolutions of 7� 7 and 9� 9 grid cells as well.
2.5. Grid translation method
One important limitation in the conventional method
of choosing a fixed single reconstruction grid is that the
location of the edges of the grid cells in relation to a
peak position and shape can adversely impact recon-
struction accuracy. For example, if a peak in the original
high-resolution map is distributed across multiple grid
cells, the highest value that is reconstructed in these cells
can severely underestimate the actual peak value.
This is illustrated in Fig. 2a that shows an original
Gaussian concentration peak in one dimension with a
peak height of one. The y-axis is the concentration and
the x-axis shows one of the sides of 40 grid cells from a
40� 40 original test map. The curve for reconstruction
on the single grid, which we will also refer to as ‘‘basis
grid’’, has two cells positioned on either side of the
original peak. Neither of these cells produces a
satisfactory reconstruction of the original peak value;
the peak value is 0.73. Moreover, the shape of the
reconstructed peak is asymmetric and ‘‘blocky’’.
In the grid translation method, we overcome this
problem by not just using the (single) basis grid for
reconstruction, but an additional number of translated
grids as well. In the one-dimensional example of Fig. 2 a
and b, the basis grid of cells was translated by a distance
equivalent to one third of the width of the basis grid cell;
this is the first translated grid. The second translated
grid was produced by translating the basis grid by a
distance of two-thirds of the basis grid cell width. The
0
0.5
Co
nce
ntr
atio
n
Co
nce
ntr
atio
n
1
0 10 20 30 40Distance
original" basis grid "1st translated grid2nd translated grid
(a) (b)
0
0.5
1
0 10 20 30 40Distance
original
3 grids combined
Fig. 2. A one-dimensional example of reconstructing using the
translation grid method. The x-axis is the number of grid cells
in one dimension. The y-axis is the concentration of the grid
cells. The grids are translated from one another by one third of
a grid cell size. The basis grid cell has a width of five in one-
dimension. (a) The original and three reconstructions on
translated grids. (b) Results from the three translated grids
are combined and compared with the original.
value of the reconstructed concentration peak for the
first translated grid increased to 0.88, which is closer to
the original; the peak shape is more symmetrical but
different than the original peak. The second translated
grid produced a peak height of 0.81 and an asymmetrical
shape.
In the grid translation method, each of the three grids
produces a reconstructed map; these ‘‘interim maps’’ are
then combined together to create the final and higher
resolution map (Fig. 2b). The final map is generated on
24 cells, a three times higher resolution than using the
single basis grid resolution of eight cells. For each
location in the 24� 24 map, the value in the grid cell of
any of the three coarse resolution interim maps is chosen
that has its grid cell position closest to the location of the
grid cell in the higher resolution map. If two grid cells
have centers at exactly the same distance to the
combined map cell, the average concentration value of
both translated grid cells is used. This results in a final
reconstructed peak in Fig. 2b with a height of 0.88 and a
shape that is much closer to the original map than using
either of the individual single grid reconstructions (in
Fig. 2a).
In two dimensions, translation of the basis grid takes
place in two directions (x and y). Translating by
multiples of 1/3 the width of the basis grid cell, results
in a total of 9 grids. For each of the three translations in
the x-direction there are three translations in the
y-direction. In theory, basis grids can be translated over
any distance equal to multiples of larger or smaller
fractions of the original basis grid cell size. For example,
translating by a distance of 1/2 or 1/5 the size of the
basis grid cell, would result in a total of 4 or 25 interim
maps, respectively.
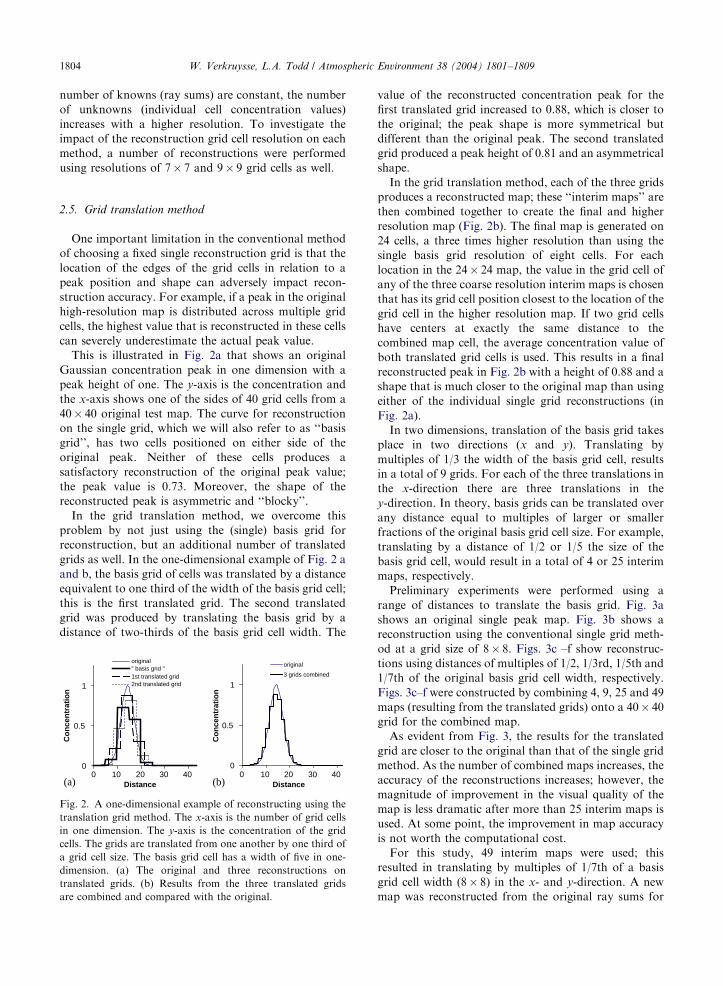
Preliminary experiments were performed using a
range of distances to translate the basis grid. Fig. 3a
shows an original single peak map. Fig. 3b shows a
reconstruction using the conventional single grid meth-
od at a grid size of 8� 8. Figs. 3c –f show reconstruc-
tions using distances of multiples of 1/2, 1/3rd, 1/5th and
1/7th of the original basis grid cell width, respectively.
Figs. 3c–f were constructed by combining 4, 9, 25 and 49
maps (resulting from the translated grids) onto a 40� 40
grid for the combined map.
As evident from Fig. 3, the results for the translated
grid are closer to the original than that of the single grid
method. As the number of combined maps increases, the
accuracy of the reconstructions increases; however, the
magnitude of improvement in the visual quality of the
map is less dramatic after more than 25 interim maps is
used. At some point, the improvement in map accuracy
is not worth the computational cost.
For this study, 49 interim maps were used; this
resulted in translating by multiples of 1/7th of a basis
grid cell width (8� 8) in the x- and y-direction. A new
map was reconstructed from the original ray sums for
ARTICLE IN PRESS
0
10
20
30
40
50
x-axisy-axis
0
10
20
30
40
50
y-axisx-axis
0
10
20
30
40
50
x-axisy-axis
0
10
20
30
40
50
x-axisy-axis
0
10
20
30
40
50
x-axisy-axis
0
10
20
30
40
50
x-axisy-axis
Fig. 3. Original and reconstructed test maps using the single
grid and grid translation method. (a) Original single peak test
map. (b) Reconstructions with an 8� 8 basis grid using a single
grid. (c–f) Reconstructions with an 8� 8 basis grid using grid
translations of 1/2nd, 1/3rd, 1/5th and 1/7th of a grid cell width,
respectively. Reconstructed maps that are the result of
combining 4, 9, 25 and 49 maps from translated grids,
respectively.
W. Verkruysse, L.A. Todd / Atmospheric Environment 38 (2004) 1801–1809 1805
each of the 49 translated grids. The 49 interim maps
were then combined into a final single 40� 40 map.
2.6. Evaluating reconstruction quality
The grid translation method was evaluated quantita-
tively by comparing reconstructed maps with translated
grids against reconstructed maps obtained with the
conventional single grid method. A conventional image
quality measure called nearness was used to describe the
discrepancy between the original test maps and the
reconstructed test maps (Herman et al., 1973; Samanta
and Todd, 1996). Nearness evaluates errors over all the
grid cells in the map, see Eq. (4).
Nearness ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiP40�40i ðC�
i � CiÞ2
P40�40i ðC�
i � C�avgÞ
2;
vuut ð4Þ
where C�i and Ci are the true value and the estimated
value, respectively, for the ith cell in the map, C�avg is the
mean concentration of all the grid cells in the ‘‘original’’
map. A nearness value of zero implies a perfect match.
To evaluate how well on average the highest
concentrations of the peaks are reconstructed, the mean
relative peak error percent (Eq. (5)) as well as the
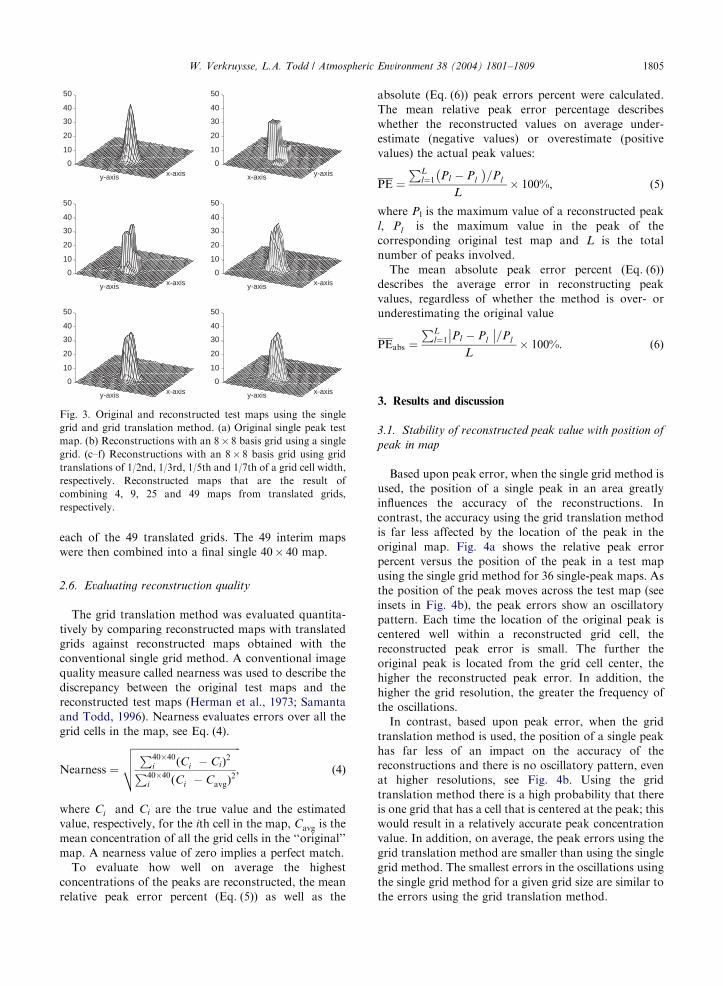
absolute (Eq. (6)) peak errors percent were calculated.
The mean relative peak error percentage describes
whether the reconstructed values on average under-
estimate (negative values) or overestimate (positive
values) the actual peak values:
PE ¼
PLl¼1 Pl � P�l
� �=P�l
L� 100%; ð5Þ
where Pl is the maximum value of a reconstructed peak
l, P�l is the maximum value in the peak of the
corresponding original test map and L is the total
number of peaks involved.
The mean absolute peak error percent (Eq. (6))
describes the average error in reconstructing peak
values, regardless of whether the method is over- or
underestimating the original value
PEabs ¼
PLl¼1 Pl � P�l
=P�lL
� 100%: ð6Þ
3. Results and discussion
3.1. Stability of reconstructed peak value with position of
peak in map
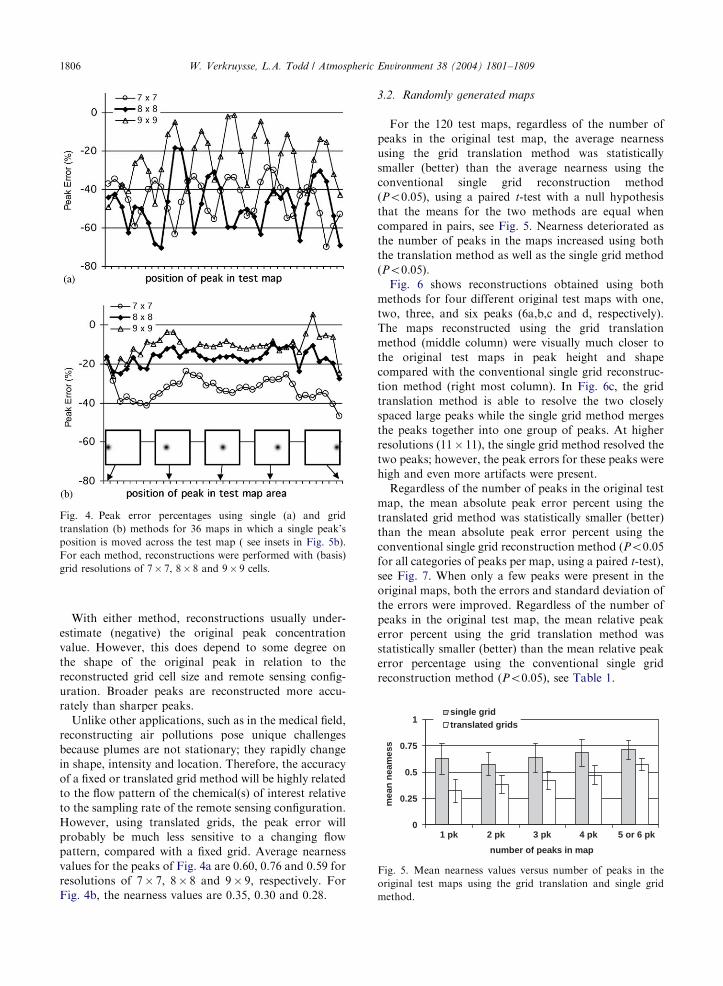
Based upon peak error, when the single grid method is
used, the position of a single peak in an area greatly
influences the accuracy of the reconstructions. In
contrast, the accuracy using the grid translation method
is far less affected by the location of the peak in the
original map. Fig. 4a shows the relative peak error
percent versus the position of the peak in a test map
using the single grid method for 36 single-peak maps. As
the position of the peak moves across the test map (see
insets in Fig. 4b), the peak errors show an oscillatory
pattern. Each time the location of the original peak is
centered well within a reconstructed grid cell, the
reconstructed peak error is small. The further the
original peak is located from the grid cell center, the
higher the reconstructed peak error. In addition, the
higher the grid resolution, the greater the frequency of
the oscillations.
In contrast, based upon peak error, when the grid
translation method is used, the position of a single peak
has far less of an impact on the accuracy of the
reconstructions and there is no oscillatory pattern, even
at higher resolutions, see Fig. 4b. Using the grid
translation method there is a high probability that there
is one grid that has a cell that is centered at the peak; this
would result in a relatively accurate peak concentration
value. In addition, on average, the peak errors using the
grid translation method are smaller than using the single
grid method. The smallest errors in the oscillations using
the single grid method for a given grid size are similar to
the errors using the grid translation method.
ARTICLE IN PRESS
Fig. 4. Peak error percentages using single (a) and grid
translation (b) methods for 36 maps in which a single peak’s
position is moved across the test map ( see insets in Fig. 5b).
For each method, reconstructions were performed with (basis)
grid resolutions of 7� 7, 8� 8 and 9� 9 cells.
0
0.25
0.5
0.75
1
1 pk 2 pk 3 pk 4 pk 5 or 6 pk
number of peaks in map
mea
n n
eam
ess
single gridtranslated grids
Fig. 5. Mean nearness values versus number of peaks in the
original test maps using the grid translation and single grid
method.
W. Verkruysse, L.A. Todd / Atmospheric Environment 38 (2004) 1801–18091806
With either method, reconstructions usually under-
estimate (negative) the original peak concentration
value. However, this does depend to some degree on
the shape of the original peak in relation to the
reconstructed grid cell size and remote sensing config-
uration. Broader peaks are reconstructed more accu-
rately than sharper peaks.
Unlike other applications, such as in the medical field,
reconstructing air pollutions pose unique challenges
because plumes are not stationary; they rapidly change
in shape, intensity and location. Therefore, the accuracy
of a fixed or translated grid method will be highly related
to the flow pattern of the chemical(s) of interest relative
to the sampling rate of the remote sensing configuration.
However, using translated grids, the peak error will
probably be much less sensitive to a changing flow
pattern, compared with a fixed grid. Average nearness
values for the peaks of Fig. 4a are 0.60, 0.76 and 0.59 for
resolutions of 7� 7, 8� 8 and 9� 9, respectively. For
Fig. 4b, the nearness values are 0.35, 0.30 and 0.28.
3.2. Randomly generated maps
For the 120 test maps, regardless of the number of
peaks in the original test map, the average nearness
using the grid translation method was statistically
smaller (better) than the average nearness using the
conventional single grid reconstruction method
(Po0.05), using a paired t-test with a null hypothesis
that the means for the two methods are equal when
compared in pairs, see Fig. 5. Nearness deteriorated as
the number of peaks in the maps increased using both
the translation method as well as the single grid method
(Po0.05).
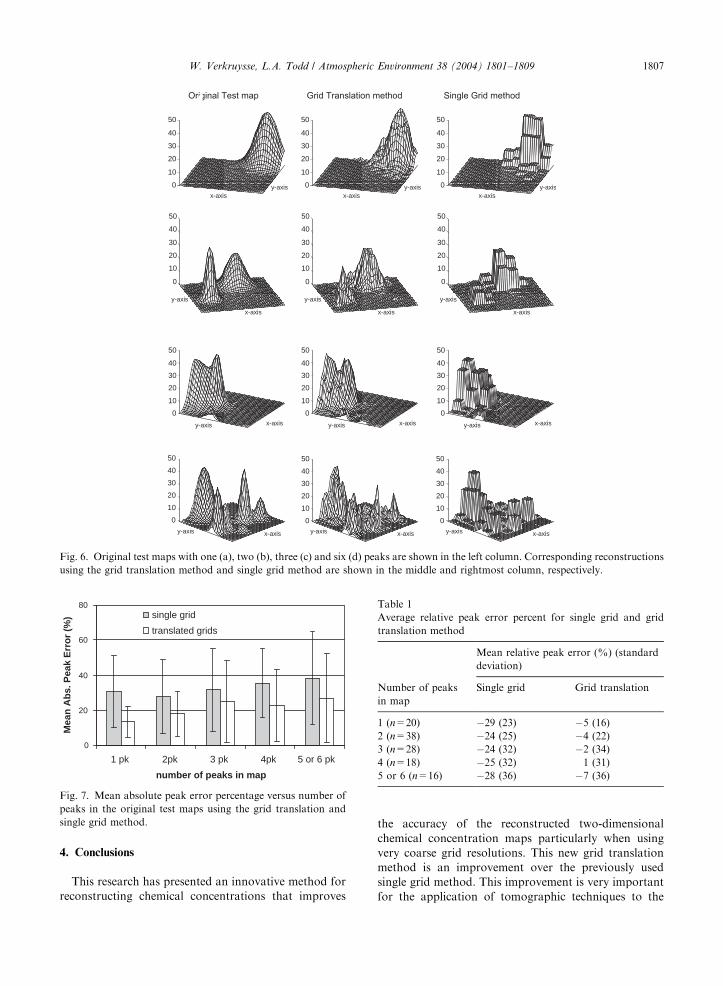
Fig. 6 shows reconstructions obtained using both
methods for four different original test maps with one,
two, three, and six peaks (6a,b,c and d, respectively).
The maps reconstructed using the grid translation
method (middle column) were visually much closer to
the original test maps in peak height and shape
compared with the conventional single grid reconstruc-
tion method (right most column). In Fig. 6c, the grid
translation method is able to resolve the two closely
spaced large peaks while the single grid method merges
the peaks together into one group of peaks. At higher
resolutions (11� 11), the single grid method resolved the
two peaks; however, the peak errors for these peaks were
high and even more artifacts were present.
Regardless of the number of peaks in the original test
map, the mean absolute peak error percent using the
translated grid method was statistically smaller (better)
than the mean absolute peak error percent using the
conventional single grid reconstruction method (Po0.05
for all categories of peaks per map, using a paired t-test),
see Fig. 7. When only a few peaks were present in the
original maps, both the errors and standard deviation of
the errors were improved. Regardless of the number of
peaks in the original test map, the mean relative peak
error percent using the grid translation method was
statistically smaller (better) than the mean relative peak
error percentage using the conventional single grid
reconstruction method (Po0.05), see Table 1.
ARTICLE IN PRESS
Original Test map
0
10
20
30
40
50
x-axisy-axis
0
10
20
30
40
50
x-axisy-axis
0
10
20
30
40
50
x-axis
y-axis
0
10
20
30
40
50
y-axisx-axis
0
10
20
30
40
50
x-axisy-axis
0
10
20
30
40
50
x-axisy-axis
0
10
20
30
40
50
x-axis
y-axis
0
10
20
30
40
50
y-axisx-axis
0
10
20
30
40
50
x-axisy-axis
0
10
20
30
40
50
x-axisy-axis
0
10
20
30
40
50
x-axis
y-axis
0
10
20
30
40
50
y-axisx-axis
Grid Translation method Single Grid method
Fig. 6. Original test maps with one (a), two (b), three (c) and six (d) peaks are shown in the left column. Corresponding reconstructions
using the grid translation method and single grid method are shown in the middle and rightmost column, respectively.
0
20
40
60
80
1 pk 2pk 3 pk 4pk 5 or 6 pk
number of peaks in map
Mea
n A
bs.
Pea
k E
rro
r (%
) single grid
translated grids
Fig. 7. Mean absolute peak error percentage versus number of
peaks in the original test maps using the grid translation and
single grid method.
Table 1
Average relative peak error percent for single grid and grid
translation method
Mean relative peak error (%) (standard
deviation)
Number of peaks
in map
Single grid Grid translation
1 (n=20) �29 (23) �5 (16)
2 (n=38) �24 (25) �4 (22)
3 (n=28) �24 (32) �2 (34)
4 (n=18) �25 (32) 1 (31)
5 or 6 (n=16) �28 (36) �7 (36)
W. Verkruysse, L.A. Todd / Atmospheric Environment 38 (2004) 1801–1809 1807
4. Conclusions
This research has presented an innovative method for
reconstructing chemical concentrations that improves
the accuracy of the reconstructed two-dimensional
chemical concentration maps particularly when using
very coarse grid resolutions. This new grid translation
method is an improvement over the previously used
single grid method. This improvement is very important
for the application of tomographic techniques to the

ARTICLE IN PRESSW. Verkruysse, L.A. Todd / Atmospheric Environment 38 (2004) 1801–18091808
environmental field where the number of instruments
(and, therefore, number of measurements) is limited and
the chemical plumes that are reconstructed are always
changing in concentration magnitude and spatial loca-
tion.
Using the grid translation method, the nearness and
concentration peak error percentages were considerably
smaller than when using the single grid method.
Absolute peak error percents were reduced by as much
as 40% and relative peak errors were reduced well over
four times using the grid translation method. The
importance of the nearness statistic is that it represents
errors in reconstruction of the peak shape, concentra-
tion, and location, as well as the appearance of artifacts.
This improvement in peak concentration errors would
potentially impact the accuracy of evaluating human
exposures in the industrial hygiene field and of calculat-
ing chemical emissions in the environmental field.
The improvement obtained using this grid translation
method is important for several reasons. First, it reduces
the significance of choosing a single optimum grid
resolution for a given application. In practice, the choice
of grid resolution is limited by the configuration
(number and position of rays) of the remote sensing
equipment. Up to a point, as the grid resolution is
increased, the reconstruction of peak concentration
values improves with both methods. However, when a
grid resolution becomes too fine with respect to the
number of rays, it is possible for only two, one, or no
rays to hit a grid cell; this is likely to result in a
reconstructed map with pronounced artifacts. With the
single grid method, as these higher grid resolutions are
selected, peak concentration errors unpredictably in-
crease or decrease. With the grid translation method,
while the peak errors change with the selection of
different basis grid resolutions, on average, the change
in errors are small and the errors tend to decrease with
higher grid resolutions.
The second significant improvement comes from the
stability of the grid translation method compared to the
single grid cell method, in regards to the location of a
peak in a space. For a given optical remote sensing
configuration, using the grid translation method, the
location of a single peak within a map had little impact
on the accuracy of the reconstruction. This is very
important because chemical plumes are always in flux
and the concentration distribution changes over time
and space. Therefore, regardless of the reconstruction
method used for mapping concentrations of chemicals in
air, the accuracy of the reconstructed peak shape, peak
concentration and number of peaks, can be adversely
impacted using a conventional fixed single grid method.
The grid translation method can use the same basis
grid size as the single grid method, and produce
reconstructions that resolve features that are missing
using the single grid method. When a single grid is used
for a reconstruction, the resulting map is obviously of
the same resolution as the selected grid size; this is
generally coarser than desired. As the resolution of the
reconstruction grid is increased, there is a risk of
producing more artifacts in the reconstruction. The
image resolution of a single grid reconstructed map can
be increased by first adding synthetic rays in between the
actual rays using interpolation techniques and then
creating a higher resolution map. Alternatively, grid
cells can be added to the coarser maps using interpola-
tion techniques. Either way, these techniques require
assumptions to be made about the underlying chemical
distribution. The proposed grid translation method
allows for an effectively higher resolution than the
resolution of the basis grid (and single grid method)
without requiring prior assumptions regarding the
concentration distribution and without risking the
increased presence of artifacts.
Finally, peak concentration errors are smaller using
the new method compared with the conventional
method because the use of multiple grids increases the
likelihood that there is at least one cell that closely
matches the position of a peak and thus gives a relatively
accurate peak value reconstruction.
This research provides a significant improvement over
conventional methods for reconstructing chemical plumes
in air using an environmental CAT scanning system. In
particular, this improvement is important for coarse
resolutions. Given the sparse remote sensing configura-
tions that must be used in the environmental and
industrial hygiene applications of this method, the ability
to produce high-resolution maps with few measurements
is significant. This improvement was achieved without
artificially interpolating additional optical rays and with-
out using any assumptions about the underlying resolu-
tion or the number of peaks in the map. Further
optimization of parameters such as number of iterations
and type of configurations may improve the presented
method even more. This work is underway.
Acknowledgements
This material is based upon work supported by the
National Science Foundation under Grant Number
00011385. We would like to thank Rob Katz for his
technical assistance with programming the algorithms
and Dr. Kathleen Mottus with technical support with
the manuscript.
References
Byer, R.L., Shepp, L.A., 1979. Two-dimensional remote air
pollution via tomography. Applied Optics Letters 4 (3),
75–79.
ARTICLE IN PRESSW. Verkruysse, L.A. Todd / Atmospheric Environment 38 (2004) 1801–1809 1809
Cormack, A.M., 1964. Representation of a function by its line
integrals, with some radiological applications II. Journal of
Applied Physics 35, 2908–2913.
Drescher, A.C., Gadgil, A.J., Price, P.N., Nazaroff, W.W.,
1996. Novel approach for tomographic reconstruction of
gas concentration distributions in air: use of smooth basis
functions and simulated annealing. Atmospheric Environ-
ment 36 (6), 929–940.
Herman, G.T., Lent, A., Rowland, S.W., 1973. Art: mathematics
and applications. A report on the mathematical foundations
and on the applicability to real data of the algebraic recon-
struction techniques. Journal of Theoretical Biology 42, 1–32.
Hounsfield, G.N., 1973. Computerized transverse axial scan-
ning (tomography): Part 1. Description of a system. British
Journal of Radiology 46, 1016–1022.
Samanta, A., Todd, L.A., 1996. Mapping air contaminants
indoors using a prototype computed tomography system.
Annals of Occupational Hygiene 40 (6), 675–691.
Samanta, A., Todd, L.A., 2000. Mapping chemicals in air using
an environmental cat scanning system: evaluation of
algorithms. Atmospheric Environment 34, 699–709.
Shepp, L.A., Vardi, Y., 1982. Maximum likelihood reconstruc-
tion for emission tomography. IEEE Transactions on
Medical Imaging MI-1 (2), 113–122.
Todd, L.A., Leith, D., 1990. Remote sensing and computed
tomography in industrial hygiene. American Industrial
Hygiene Association Journal 51, 224–233.
Todd, L.A., Ramachandran, G., 1994. Evaluation of algo-
rithms for tomographic reconstruction of chemical
concentrations in indoor air. American Industrial Hygiene
Association Journal 55 (5), 403–417.
Todd, L.A., Ramanathan, M., Mottus, K., Katz, R., Dodson,
A., Mihlan, G., 2001. Measuring chemical emissions using
open-path fourier transform infrared (OP-FTIR) spectro-
scopy and computer assisted tomography. Atmospheric
Environment 35, 1937–1947.
Tsui, B.M.W., Zhao, X.D., Frey, E.C., Gulberg, G.T., 1991.
Comparison between ML-EM and WLS-CG algorithms for
spect image-reconstruction. IEEE Transactions on Nuclear
Science 38 (6), 1766–1772.
Yost, M.G., Gadgil, A.J., Drescher, A.C., Zhou, Y., Simonds,
M.A., Levine, S.P., Nazaroff, W.W., Saison, P.A., 1994.
Imaging indoor tracer-gas concentrations with computed
tomography: experimental results with a remote sensing
FTIR system. American Industrial Hygiene Association
Journal 55 (5), 395–402.
Warland, J.S., Dias, G.M., Thurtell, G.W., 2001. A tunable
diode laser system for ammonia flux measurements
over multiple plots. Environmental Pollution 114 (2),
215–221.
Wolfe, D.C., Byer, R.L., 1979. Model studies of laser
absorption computed tomography for remote air pollution
measurement. Applied Optics 21, 1165–1177.