igor ferreira do prado · aos meus amigos adna lu te, jean pacheco, nara cunha, raissa oliveira,...
TRANSCRIPT

IGOR FERREIRA DO PRADO
CONSTRUCAO E CONTROLE DO SISTEMA
PENDULO INVERTIDO
Vitoria da Conquista
Julho de 2011

IGOR FERREIRA DO PRADO
CONSTRUCAO E CONTROLE DO SISTEMA
PENDULO INVERTIDO
Projeto de PFC apresentado ao Curso deEngenharia Eletrica do Instituto Federal daBahia como parte dos requisitos para a ob-tencao do Grau de Engenheiro Eletricista.
Orientador:
Dr. Jorge Ricardo de Araujo Kaschny
Instituto Federal da BahiaCampus Vitoria da Conquista
Coordenacao do Curso de Engenharia Eletrica
Vitoria da Conquista
Julho de 2011

i
Agradecimentos
Gostaria de agradecer imensamente ao meu orientador, Prof. Dr. Jorge Ricardo de
Araujo Kaschny, pela oportunidade oferecida nos projetos de pesquisa, pelo incentivo e
exemplo de profissional, pela paciencia e atencao em suprir minhas duvidas, bem como
nas informacoes e conselhos que levarei por toda a vida.
A professora Dra. Jossana Maria de Souza Ferreira, pelo incentivo inicial ao desen-
volvimento de pesquisa.
Agradecer aos meus pais (Cecılia e Manoel) e minha irma (Danielle), por terem me
oferecido oportunidades de conhecimento e afeto. A minha companheira Barbara pela
compreensao por varios momentos dedicados ao desenvolvimento desse trabalho.
Aos meus amigos Adna Luıte, Jean Pacheco, Nara Cunha, Raissa Oliveira, Thiago
Maciel e Vinıcius Dutra, pelo suporte, bem como nos comentarios de incentivo e interesse
pelo trabalho, e em especial a Angelo Cesar e Joao Gualberto que me estimularam a
terminar o projeto com empenho e energia.

ii
Resumo
Na presente contribuicao e apresentado um estudo de um problema classico de sistemafısico instavel - o pendulo invertido, que e adequadamente resolvido por tecnicas de con-trole. Isso envolve a construcao de uma planta experimental, representando o sistema,bem como o projeto de um sistema automatico de controle, do tipo proporcional-integral-diferencial (PID). Neste trabalho sao discutidas cada etapa de implementacao, os conceitosbasicos e as tecnicas envolvidas durante seu desenvolvimento. Simulacoes computacionaisforam empregadas para auxiliar o mapeamento dos parametros de controle que alimen-tam o algoritmo implementado no microcontrolador, presente no sistema automatico decontrole. Os resultados obtidos se mostram satisfatorios para o controle de um penduloinvertido. Contudo, algumas limitacoes surgiram devido a simplicidade da construcaoproposta, e novas implementacoes sao apontadas para resolver tais problemas.

iii
Abstract
In this contribution we present a study of a classical problem of unstable physical system- the inverted pendulum, which is properly solved by control techniques. Such studyinvolves the construction of an experimental plant, representing the system, as well asthe design of an automatic control system, of the proportional-integral-differential (PID)type. In this work we discuss each implementation step, the basic concepts and techniquesinvolved in its development. Computer simulations were used to assist the parametersmapping which will feed the control algorithm implemented at the microcontroller, inthe automatic control system. The results prove to be satisfactory for the control of aninverted pendulum. However, some limitations have emerged due to the simplicity of theconstruction, and new implementations are pointed out to solve such problems.

iv
Sumario
Lista de Figuras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. vi
Lista de Tabelas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. ix
1 INTRODUCAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 1
2 SISTEMAS PENDULARES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 3
3 MODELAGEM MATEMATICA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 6
3.1 MODELAGEM FISICA PENDULO INVERTIDO . . . . . . . . . . . . . . . . . . . . . . p. 6
3.2 MODELAGEM DO PENDULO SIMPLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 9
4 PROTOTIPO DO PENDULO INVERTIDO . . . . . . . . . . . . . . . . . . . . . . . p. 12
4.1 PROJETO MECANICO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 12
4.2 PROJETO ELETRICO. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 14
4.2.1 ACIONAMENTO DE MOTOR CC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 15
4.2.2 ACIONAMENTO DE MOTOR DE PASSOS. . . . . . . . . . . . . . . . . . . . p. 17
4.3 SISTEMA DE CONTROLE MICROCONTROLADO . . . . . . . . . . . . . . . . . . p. 19
5 CARACTERIZACAO DO SISTEMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 24
5.1 PENDULO INVERTIDO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 24
5.2 MOTOR DE PASSO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 26
6 TEORIA DE CONTROLE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 28
6.1 ANALISE DE INSTABILIDADE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 28
6.2 CONTROLE PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 29

Sumario v
6.2.1 ACAO PROPORCIONAL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 31
6.2.2 ACAO INTEGRAL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 33
6.2.3 ACAO DERIVATIVA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 34
6.3 SINTONIA DE CONTROLADORES PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 35
6.3.1 METODO DE SINTONIA MANUAL . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 37
6.3.2 SINTONIA PELO METODO DO LUGAR DAS RAIZES . . . . . . . p. 37
7 RESULTADOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 43
8 CONCLUSAO. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 47
REFERENCIAS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 48
APENDICE A -- DEMOSTRACAO. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 50
A.1 MOMENTO DE INERCIA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 50
APENDICE B -- FIRMWARE ATMEGA8. . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 52
APENDICE C -- PROGRAMA GERAL MATLAB . . . . . . . . . . . . . . . . . . . p. 54
APENDICE D -- PROGRAMA SINTONIA DO CONTROLADOR PID p. 57

vi
Lista de Figuras
Figura 1 Pendulo Simples. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Figura 2 Movimento de (a) pendulo e (b) dispositivo FPS . . . . . . . . . . . . . . . . . . . . . . . . 4
Figura 3 Deformacao padrao de uma estrutura (a) sem isolamento de base e (b) com
isolamento de base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Figura 4 Diagrama de representacao do modelo do pendulo invertido. . . . . . . . . . . . . 5
Figura 5 Diagrama de corpo livre do pendulo invertido. . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Figura 6 Diagrama de corpo livre do pendulo simples. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Figura 7 Ilustracao de duas possibilidades de construcao de um pendulo invertido.
(a) tipo “carrinho”ou (b) tipo “trilho”. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Figura 8 Montagem Tipo Carrinho em MDF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Figura 9 Prototipo Tipo Trilho. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Figura 10 Potenciometro sensor de posicao angular da haste. . . . . . . . . . . . . . . . . . . . . . . 15
Figura 11 Ponte H. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Figura 12 Circuito da ponte H. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16

Lista de Figuras vii
Figura 13 Circuito da ponte H. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Figura 14 Driver do motor de passo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Figura 15 (a) Motor unipolar de meio passo, (b) Motor Unipolar de passo inteiro. . 19
Figura 16 Diagrama em blocos da CPU do ATmega8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Figura 17 Programador AVR-910-USB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Figura 18 Circuito Pendulo Invertido. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Figura 19 Inversao do pendulo invertido (pendulo simples). . . . . . . . . . . . . . . . . . . . . . . . . 24
Figura 20 Grafico do movimento do Pendulo Simples. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Figura 21 Diagrama de Blocos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Figura 22 Diagrama de blocos fatorado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Figura 23 Diagrama de polos e zeros. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Figura 24 Diagrama de blocos de um sistema de controle em malha fechada. . . . . . . . 30
Figura 25 Diagrama de blocos do controlador PID. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Figura 26 Acao de controle gerada pelo controlador proporcional. . . . . . . . . . . . . . . . . . . 31
Figura 27 Efeito da reducao da BP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32

Lista de Figuras viii
Figura 28 Efeito da inclusao do controle integral - PI. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Figura 29 Comparacao de um controle P com um controle PD. . . . . . . . . . . . . . . . . . . . . 34
Figura 30 Curva de resposta a uma entrada em degrau unitario. . . . . . . . . . . . . . . . . . . . 36
Figura 31 Curvas de resposta ao degrau unitario do sistema generico de segunda
ordem. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Figura 32 Lugar das raızes do sistema controlado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Figura 33 Deslocamento da haste. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Figura 34 Posicionamento do carro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Figura 35 Velocidade do carro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Figura 36 Momento de inercia de uma barra. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
ix
Lista de Tabelas
1 Motor de Passo 17PM-H005-P2VA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 17
2 Efeito de cada parametro sobre o processo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 37

1
1 INTRODUCAO
A maioria dos sistemas encontrados na pratica, quer sejam sistemas naturais quer
sejam de natureza tecnica, sao via de regra instaveis. O estudo e a implementacao de
tecnicas de controle sao utilizadas para otimizar o uso desses sistemas, tornando-os mais
confiaveis, robustos e eficientes.
Para identificar e ter oportunidade de estudar e compensar um sistema instavel e
comum utilizar-se em laboratorio tecnicas de estabilizacao de um pendulo invertido. Este
sistema tem consideravel interesse pratico porque representa a idealizacao em laboratorio
de sistemas mecanicos intrinsecamente instaveis que sao encontrados em importantes
aplicacoes tecnicas, como por exemplo, lancamento de foguetes, controle de satelites, e sis-
temas para protecao de edifıcios em regioes propensas a terremotos, sendo mais utilizado
como princıpio basico de equilıbrio de um robo bıpede.
No presente trabalho e apresentado um problema classico de instabilidade que e ade-
quadamente resolvido com o uso de tecnicas de controle. Abordaremos aqui a construcao
de uma planta experimental de um pendulo invertido em conjunto com a implementacao
de um sistema automatizado de controle. Isso envolve a aplicacao de diversos assuntos
abordados no curso de engenharia eletrica, permitindo a consolidacao dos conhecimentos
adquiridos na area de controle de sistemas, atraves de um problema de cunho pratico.
Em linhas gerais, o sistema pendulo invertido consiste de uma haste vertical livre
para se movimentar em torno de um ponto em sua extremidade inferior. Este ponto e fixo
em uma plataforma que pode mover-se unidirecionalmente com o auxilio de um pequeno
motor. Uma vez posto na vertical, a haste tende a cair para um lado ou para o outro
caracterizando assim um sistema instavel. Entao dependendo do sentido de deslocamento
da plataforma e possıvel exercer uma forca que tende a contrabalancar o movimento
de queda da haste. Aqui, a ideia principal e utilizar um controlador para fazer com
que a haste fique em equilıbrio na posicao vertical, sendo a posicao angular da mesma
monitorada via um potenciometro.

1 INTRODUCAO 2
A proposta de construcao de uma planta que represente um pendulo invertido se deu,
primeiramente, em 2007, quando, sob orientacao da professora Dra. Jossana Maria de
Souza Ferreira, iniciou-se o projeto de Iniciacao Cientifica (IC). Na epoca o intuito era
motivar o aluno a adquirir conhecimento juntamente com o desenvolvimento pratico de um
projeto de automacao envolvendo diversos temas de engenharia, tais como: controladores,
maquinas eletricas, transmissao de sinais e eletronica. Os principais fundamentos teoricos
necessarios para a conclusao desse projeto esta disponıvel em diversos artigos disponıveis
na internet, alem da utilizacao da literatura basica utilizada durante o curso de engenharia.
Os capıtulos seguintes abordarao a modelagem fıscia-matematica do prototipo, as
simulacoes computacionais para aquisicao de dados com finalidade de identificacao dos
parametros do modelo, simulacao do sistema de controle, projeto do prototipo e circuitos
auxiliares, e nos ultimos capıtulos serao expostos os resultados alcancados, conclusoes,
referencias bibliograficas e apendices.

3
2 SISTEMAS PENDULARES
O pendulo simples consiste de um sistema composto por uma massa acoplada a um
pivo, atraves de um fio inextensıvel e de massa desprezıvel que permite sua movimentacao
livremente. Como pode ser visto na Figura 1, a massa fica sujeita a forca restauradora
causada pela gravidade. O braco executa movimentos alternados em torno da posicao
central, chamada posicao de equilıbrio. O pendulo simples e muito utilizado em estudos
de movimento oscilatorio e de forca peso, alem de ser comumente utilizado para medicao
da forca gravitacional em laboratorios.
Figura 1: Pendulo Simples.
Fonte:http://pt.wikipedia.org/wiki/Ficheiro:Pendulo.png
A descoberta da periodicidade do movimento pendular foi feita por Galileu Galilei1.
O movimento de um pendulo simples envolve uma grandeza chamada perıodo (T), que e o
intervalo de tempo que o objeto leva para percorrer toda a trajetoria. Como consequencia
1Galileu Galilei(1564-1642): foi um fısico, matematico, astronomo e filosofo italiano que teve um papelpreponderante na chamada revolucao cientıfica.

2 SISTEMAS PENDULARES 4
dessa grandeza, existe a frequencia (f), numericamente igual ao inverso do perıodo (f =
1/T ), e que portanto se caracteriza pelo numero de ciclos que o objeto percorre a trajetoria
pendular num intervalo de tempo especıfico.
Existem inumeros pendulos estudados por fısicos, alguns deles sao os pendulos fısicos,
de torcao, conicos, de Foucalt, de Karter e invertidos.
Como tema principal do trabalho em questao, o pendulo invertido, por ser intrinse-
camente instavel, desperta grande interesse de varios pesquisadores.
Com o desenvolvimento das tecnologias que envolvem a construcao civil, tambem se
desenvolveram tecnicas para protecao de edifıcios em areas propensas a abalos sısmicos que
utilizam a tecnica de pendulo invertido, como exemplo pode-se citar o Sistema Pendular
com Atrito (FPS-Friction Pendulum System).
Os aparelhos FPS apresentam um mecanismo de funcionamento semelhante a um
pendulo. Apos sofrerem um deslocamento devido a uma acao sısmica, a estrutura volta a
sua posicao inicial devido ao peso da estrutura e a geometria esferica da superfıcie de des-
lizamento dos dispositivos isoladores (ESTEVES, 2010). A Figura 2 ilustra o movimento
de um pendulo e o movimento de um apoio FPS.
Figura 2: Movimento de (a) pendulo e (b) dispositivo FPS
Fonte: (ESTEVES, 2010)
A deformacao padrao de uma estrutura de base fixa e bastante diferente comparada
com a estrutura com compensacao na base. Na Figura 3 pode observar-se as deformacoes
padrao de uma estrutura sem compensacao de base (Figura 3 (a)) e de uma estrutura com
compesacao de base (Figura 3 (b)). Verifica-se que a estrutura sem compensacao de base
apresenta elevado grau de deformacao ao nıvel dos pisos, ao contrario da estrutura com
compensacao de base, que apenas apresenta deslocamentos laterais ao nıvel dos apoios,
sendo que a superstrutura se comporta como um corpo rıgido (ESTEVES, 2010).

2 SISTEMAS PENDULARES 5
Figura 3: Deformacao padrao de uma estrutura (a) sem isolamento de base e (b) comisolamento de base
Fonte: (ESTEVES, 2010)
Modelos biomecanicos do modo de caminhar dos seres humanos tem muitas aplicacoes
em areas como esportes, fabricacao de calcados, robotica e principalmente em proteses
de parte do corpo humano. Pesquisadores desenvolveram estudos relacionados a um
sistema minimizador de energia na caminhada propondo uma modelagem de um sistema
de pendulo invertido. Para a caminhada durante um ciclo de passada o centro de massa
perde velocidade ao ganhar altura e vice-versa. Em contraste, a corrida e caracterizada
como um sistema massa mola, a energia elastica e adicionada na troca entre as energias
cinetica e potencial (BALBINOT, 2009), como pode ser visto na Figura 4.
Figura 4: Diagrama de representacao do modelo do pendulo invertido.
Fonte: (BALBINOT, 2009)

6
3 MODELAGEM MATEMATICA
3.1 MODELAGEM FISICA PENDULO INVERTIDO
No estudo de sistemas de controle o modelamento matematico de um sistema dinamico
e definido como um conjunto de equacoes que representam bem a dinamica do sistema.
A dinamica do sistema mecanico pendulo invertido, e descrito em termos de equacoes
diferenciais, que sao obtidas pelas leis fısicas que regem o sistema.
A seguir sera utilizada uma abordagem matematica com a finalidade de encontrar a
funcao de transferencia do sistema completo do pendulo invertido, com o objetivo de se
chegar a uma analise transitoria ou a resposta em frequencia do sistema.
Figura 5: Diagrama de corpo livre do pendulo invertido.
Fonte: Propria

3.1 MODELAGEM FISICA PENDULO INVERTIDO 7
Coordenadas do centro de gravidade:
XG = x+ l sin(Θ) (3.1)
XG = x+ l cos(Θ).Θ (3.2)
XG = x+ l cos(Θ).Θ− l sin(Θ).Θ2 (3.3)
YG = l cos(Θ) (3.4)
YG = −l sin(Θ).Θ (3.5)
YG = −l sin(Θ).Θ− l cos(Θ).Θ2 (3.6)
O somatorio das forcas na direcao X do centro de gravidade da haste do pendulo e
dado por:
∑Fx = mXG (3.7)
Fx = mx+ml cos(Θ).Θ−ml sin(Θ).Θ2 (3.8)
O somatorio das forcas na direcao Y do centro de gravidade da haste do pendulo e
dado por:
∑Fy = m.YG (3.9)
Fy = −ml sin(Θ).(Θ)−ml cos(Θ).(Θ)2 +mg (3.10)
O somatorio dos momentos de inercia e dado por:

3.1 MODELAGEM FISICA PENDULO INVERTIDO 8
∑MG = IΘ +BR.Θ (3.11)
IΘ +BR.Θ = Fyl sin(Θ)− Fxl cos(Θ) (3.12)
Substituindo as equacoes 3.8 e 3.10 na equacao 36, e fazendo as devidas simplificacoes
matematicas, temos:
IΘ +BR.Θ = −ml2.(Θ) +mgl sin(Θ)−mlx cos(Θ) (3.13)
Assumindo que a haste e uniforme, e que possui momento de inercia1 de ml2/3 e
tambem que Θ e muito pequeno, a equacao 3.13 assume a forma abaixo.
4
3ml2Θ(t) +BRΘ(t)−mglΘ(t) = −mlx(t) (3.14)
Reescrevendo a equacao 3.14 para a forma:
Θ(t) +3BR
4ml2Θ(t)− 3g
4lΘ(t) =
−3
4lx (3.15)
Visando a obtencao de uma representacao padrao define-se os parametros da equacao
3.15, como sendo:
2ζωn =3BR
4ml2(3.16)
ω2n =
3g
4l(3.17)
Khaste =3
4l(3.18)
A equacao 3.15, ficara na forma ideal para a aplicacao da transformada de Laplace.
Θ(t) + 2ζωnΘ(t)− ω2nΘ(t) = −Kpx(t) (3.19)
1Descricao e calculo do momento de inercia para uma haste esta demonstrado no APENDICE A.

3.2 MODELAGEM DO PENDULO SIMPLES 9
Aplicando a transformada de Laplace na equacao 3.19, tem-se a funcao de trans-
ferencia generica para um sistema de pendulo invertido.
Θ(s)
X(s)=
−Kps2
s2 + 2ζωns− ω2n
(3.20)
3.2 MODELAGEM DO PENDULO SIMPLES
Para que o sistema modelado seja o mais fiel possıvel ao modelo real, aqui utiliza-se
uma abordagem fısica do sistema pendulo simples que sera utilizado para a estimacao dos
parametros do pendulo invertido, uma vez que ambos apresentam caracterısticas seme-
lhantes. Como mostrado na Figura 6, onde similarmente a Figura 5, serao equacionadas
as expressoes matematicas que regem seu movimento.
Figura 6: Diagrama de corpo livre do pendulo simples.
Fonte: Propria

3.2 MODELAGEM DO PENDULO SIMPLES 10
YG = Y − l cos(Θ) (3.21)
YG = Y + l sin(Θ).Θ (3.22)
YG = l sin(Θ).Θ + l cos(Θ).Θ2 (3.23)
XG = X − l sin(Θ) (3.24)
XG = X − l cos(Θ).Θ (3.25)
XG = X − l cos(Θ).Θ + l sin(Θ).Θ2 (3.26)
Definidas as equacoes para a posicao, velocidade e aceleracao da haste, pode-se fazer
o somatorio das forcas nas componentes dos eixos X e Y .
FX = −ml cos(Θ).Θ +ml sin(Θ).Θ2 (3.27)
FY = ml sin(Θ).Θ +ml cos(Θ).(Θ)2 +mg (3.28)
Somatorio dos momentos de inercia.
∑MG = IΘ +BR(Θ) (3.29)
−FY l sin(Θ) + FX cos(Θ) = IΘ +BR(Θ) (3.30)
Substituindo as equacoes 3.27 e 3.28 na equacao 3.29, e fazendo as devidas simpli-
ficacoes matematicas, temos:
(I +ml2)Θ +BRΘ +mgl sin(Θ) = 0 (3.31)

3.2 MODELAGEM DO PENDULO SIMPLES 11
Como demonstrado no APENDICE A uma haste uniforme possui um momento do
inercia igual a (I = ml3/3), e levando-se em consideracao que Θ e suficientemente pequeno
para admitir que sin(Θ) ≈ Θ, a equacao 3.31, toma a forma:
Θ +3BR
4ml2Θ +
3g
4l= 0 (3.32)
Substituindo os termos:
2ζωn =3BR
4ml2
ω2 =3g
4l
Obtem-se:
Θ(t) + 2ζωnΘ(t) + ω2nΘ(t) (3.33)
Atraves da equacao:
ωd = ωn√
1− ζ2 (3.34)
Em geral Θ(t) apresenta uma resposta senoidal de frequencia (wd/2π) amortecida com
uma envoltoria exponencial e−ζωnt. Que tem como expressao geral:
Θ(t) = Ke−ζωnt sin(ωdt + a) (3.35)

12
4 PROTOTIPO DO PENDULO INVERTIDO
4.1 PROJETO MECANICO
O projeto mecanico constitui a implementacao fısica do modelo do pendulo invertido.
Em linhas gerais, o pendulo invertido e constituıdo por uma base movel sobre a qual
oscila uma haste com apenas um grau de liberdade. Atraves do deslocamento da referida
base, pretende-se manter a haste equilibrada na posicao vertical. Uma analogia simples
e a brincadeira de equilibrar um cabo de vassoura na palma da mao. Para conseguir
equilibrar o cabo e necessario ficar constantemente movendo a mao de forma a manter o
eixo do cabo da vassoura nas proximidades da sua posicao vertical, que e um ponto de
equilıbrio instavel.
Como exemplos de tal implementacao a nıvel de laboratorio, temos as Figuras 7a e 7b
a seguir. Na Figura 7a e mostrada uma implementacao do tipo “carrinho”, onde temos
uma plataforma movel similar a um carro de brinquedo, sobre a qual a haste do pendulo
e montada. Na Figura 7b e ilustrada a concepcao do tipo “trilho”, onde o pendulo e
instalado sobre o carro movel montado sobre um trilho guia, muito similar ao carro de
uma impressora jato de tinta.
Figura 7: Ilustracao de duas possibilidades de construcao de um pendulo invertido. (a)tipo “carrinho”ou (b) tipo “trilho”.
Fonte: Propria

4.1 PROJETO MECANICO 13
Inicialmente buscou-se uma montagem que fosse de construcao simples, facil com custo
acessıvel, logo optou-se pela implementacao ilustrada na Figura 7a, referente a montagem
sobre o carrinho. Tal montagem foi realizada com a utilizacao de madeira MDF para a
base do carrinho e para a haste do pendulo, os eixos foram confeccionados de material
metalico e foram utilizadas rodas de skate para a locomocao, como mostrado na Figura
8.
Figura 8: Montagem Tipo Carrinho em MDF.
Fonte: Propria
Concluıda a montagem do prototipo foi acoplado ao mesmo um motor de corrente
contınua em seu eixo, para a realizacao de testes preliminares. Como resultado pode-se
notar que a base construıda ficou com sobre peso e que as rodas de skate nao forneciam
a aderencia necessaria para a movimentacao rapida do sistema. Em outras palavras, o
carrinho patinava, o que inviabilizou a continuacao desta abordagem.
Como alternativa a implementacao do sistema utilizamos a montagem sobre trilho
(Figura 7b). Para tanto utilizou-se a estrutura de uma impressora jato de tinta modelo
EPSON660 como plataforma para a construcao da planta, passando a ter significativos
ganhos em precisao e robustez. Para a montagem do sistema utilizou-se o compartimento
dos cartuchos de tinta como “carrinho”, sobre o qual foi acoplado uma haste de MDF.
Para o sistema de movimentos do carrinho foi utilizado o mesmo empregado originalmente
na impressora, que usa um motor de passos para seu posicionamento. A Figura 9 mostra

4.2 PROJETO ELETRICO 14
o prototipo do pendulo invertido em fase final de construcao.
Figura 9: Prototipo Tipo Trilho.
Fonte: Propria
4.2 PROJETO ELETRICO
Nesta etapa iremos abordar os circuitos de acionamentos, sensoriamento e controle das
abordagens adotadas. Nota-se que os circuitos de sensoriamento e controle sao comuns
em ambos.
Apos ter sido efetuada a montagem do pendulo, passou-se a etapa de desenvolvimento
do sistema de acionamento do motor de passos, a analise de quais componentes seriam
necessarios para sensoriamento de posicao da haste, alem do dimensionamento do circuito
de acoplamento do sensor.
Como alternativa a implementacao do sensor responsavel pela medicao do angulo da
haste, em ambas montagens, utilizou-se um potenciometro comum, na configuracao de
divisor de tensao limitando a tensao maxima de 5V na entrada analogica do ATmega8.
A Figura 10, mostra o local de fixacao do potenciometro no compartimento de cartuchos
de tinta.

4.2 PROJETO ELETRICO 15
Figura 10: Potenciometro sensor de posicao angular da haste.
Fonte: Propria
4.2.1 ACIONAMENTO DE MOTOR CC
Diante do que foi exposto sobre a montagem do tipo carrinho, o circuito projetado
para este dispositivo foi utilizado para acionamento do sistema locomotor do pendulo, ou
seja, foi apenas projetado um circuito de acionamento de um motor de corrente contınua
atraves da utilizacao de uma ponte H.
Este circuito tem o papel de controlar um motor DC a partir de sinais gerados por um
microcontrolador ou sinais de baixa potencia. Devido a disposicao dos seus componen-
tes, torna-se extremamente facil selecionar o sentido da rotacao de um motor. Tal acao
pode ser feita utilizando-se quatro transistores devidamente arranjados formando a letra
“H”como ilustrado na Figura 11.

4.2 PROJETO ELETRICO 16
Figura 11: Ponte H.
Fonte: Propria
Para o acionamento do motor, basta acionar o par de chaves Q1 e Q2, como exemplo
Figura 11a, que faz com que a corrente flua da esquerda para a direita, fazendo com que
o motor gire. Para inversao do sentido de rotacao do motor desliga-se as chaves Q1 e Q2,
e aciona-se o outro par de chaves Q3 e Q4, como mostrado na Figura 11b.
Para a implementacao da ponte H, utilizou-se o circuito da Figura 12, que emprega
quatro transistores do tipo NPN (referencia: TIP31), e quatro resistores de 1kΩ.
Figura 12: Circuito da ponte H.
Fonte: (BERTINI, 2007)
A Figura 13, mostra a montagem do circuito de acionamento do motor de corrente
contınua, ou seja, a implementacao do circuito da Figura 12, bem como o motor acoplado
a transmissao no eixo do carrinho.

4.2 PROJETO ELETRICO 17
Figura 13: Circuito da ponte H.
Fonte: Propria
4.2.2 ACIONAMENTO DE MOTOR DE PASSOS
No presente momento sera abordado o circuito relacionado com o acionamento do
motor utilizado no prototipo final do pendulo invertido.
Aproveitando a estrutura de deslocamento do compartimento dos cartuchos de tinta
da impressora, o motor de passo bipolar original foi substituıdo por um outro motor
de passo unipolar, de caracterısticas informadas na Tabela 1. Essa substituicao fez-se
necessario, devido a falta de informacoes e complexidade do circuito de acionamento do
motor original.
Tabela 1: Motor de Passo 17PM-H005-P2VA
Tensao Corrente Angulo de passo12V 500mA 1.8º
Fonte: Propia
O motor de passo unipolar e um dispositivo empregado na conversao de pulsos eletricos
em movimentos rotativos. Nestes, cada fase consiste de um enrolamento com derivacao
central ou mesmo de dois enrolamentos separados, de forma que o campo magnetico possa
ser invertido sem a necessidade de se inverter o sentido da corrente. Sao empregados cada
vez mais em areas como informatica e robotica pois possuem uma alta precisao em seu
movimento, alem de serem rapidos, confiaveis e faceis de controlar.
O motor de passo utilizado possue 2 bobinas com 6 fios. Cada bobina consiste de
um enrolamento com derivacao central chamado de “center-tape”. O center-tape, tem

4.2 PROJETO ELETRICO 18
como funcao alimentar o motor, enquanto que os terminais quando aterrados, efetuam o
controle do movimento. Ao submeter uma das bobinas a uma tensao, o campo magnetico
induzido no estador, provoca um movimento de rotacao no rotor de motor ate atingir um
determinado ponto de equilıbrio. Este movimento e possıvel pois as bobinas do motor
sao isoladas umas das outras. Entao, ao aplicar-se uma tensao nas bobinas, o campo
magnetico e invertido sem a necessidade de se inverter o sentido da corrente para efetuar
a rotacao no eixo do motor.(QUEIROZ, 2002)
Para tal acionamento do motor de passo e necessario saber qual a sequencia correta
que deve-se aterrar os terminais para fazer o motor girar continuamente, ou seja, saber
qual a ordem correta dos fios que a corrente fluira para produzir um campo magnetico
que atraira o rotor do motor para que ele gire em sequencia.
O driver de acionamento do motor de passo foi realizado utilizando o circuito integrado
ULN2003, que e uma matriz de transistores Darlington que podem controlar correntes de
ate 500mA. O esquema do circuito em questao pode ser visualizado na Figura 14.
Figura 14: Driver do motor de passo.
Fonte: www.eleccircuit.com
Nota-se que os pinos D0 ao D3 da Figura 14, sao responsaveis pela transmissao dos
sinais de acionamento do motor de passo, como descrito acima, estes precisao ser acionados
na sequencia correta para girar o motor. Sendo assim para gerar tais sinais de forma
correta com frequencias de ate 1kHz utilizamos um circuito microcontrolado.
O acionamento do motor de passo pode ser caracterizado pelo numero de passos
possıveis entre o rotor e as bobinas. A energizacao de somente uma bobina de cada vez
produz um pequeno deslocamento no rotor. Este deslocamento ocorre simplesmente pelo
fato de o rotor ser magneticamente ativo e a energizacao das bobinas criar um campo
magnetico intenso que atua no sentido de se alinhar com os dentes do rotor. Assim,

4.3 SISTEMA DE CONTROLE MICROCONTROLADO 19
polarizando de forma adequada as bobinas, podemos movimentar o rotor entre as bobinas
(meio passo ou “half-step”Figura 15a) ou alinhadas com as mesmas (passo completo ou
“full-step”15b).
Figura 15: (a) Motor unipolar de meio passo, (b) Motor Unipolar de passo inteiro.
Fonte: (BRITES; SANTOS, 2008)
4.3 SISTEMA DE CONTROLE MICROCONTROLADO
Os avancos tecnologicos demandam cada vez mais dispositivos eletronicos, assim a
cada dia estao sendo criados novos componentes mais poderosos e versateis. E nesta
categoria que os microcontroladores tem alcancado grade desenvolvimento, devido a sua
facilidade de uso em ampla faixa de aplicacoes, o que torna relativamente rapido e facil o
projeto de novos equipamentos.
Atualmente os microcontroladores estao presentes em inumeros produtos, para se ter
uma ideia todos os automoveis modernos, aparelhos de controle remoto, cameras digitais,
telefones celulares, filmadoras, refrigeradores, lava-loucas, lavadoras de roupas, contem ao
menos um microcontrolador. Basicamente, qualquer produto ou dispositivo que interaja
com o usuario possui um microcontrolador interno.
Em termos gerais um microcontrolador e um “computador de um so chip”, pois in-
corpora varias caracterısticas em comum com um computador em uma unica pastilha de
silıcio, dentre estas caracterısticas pode-se citar:

4.3 SISTEMA DE CONTROLE MICROCONTROLADO 20
CPU (unidade de processamento central) que executa programas;
Memoria RAM (memoria de acesso aleatorio) onde ele pode armazenar variaveis;
Alguns dispositivos de entrada e saıda para interagir com o meio externo.
A principal caracterıstica dos microcontroladores e a capacidade de armazenar e exe-
cutar um programa que determina como o chip devera funcionar, ou seja, pode-se alterar
as funcionalidades de um circuito sem ter a necessidade de se alterar o hardware do
sistema, modificando apenas o firmware1 gravado no microcontrolador.
De acordo com as caracterısticas informadas abaixo, o microcontrolador escolhido
para a realizacao do projeto foi o compacto ATmega8 de 28 pinos (PDIP) da Atmel.
Caracterısticas do ATmega8:
baixa potencia e alto desempenho, com arquitetura RISC avancada;
130 instrucoes, a maior parte executada em um unico ciclo de relogio;
Operacao de ate 16 MIPS2 a 16MHz;
8 kbytes de memoria de programa Flash;
512 bytes de memoria EEPROM;
1 kbyte de memoria SRAM;
Bits de bloqueio para protecao do software;
23 entradas e saıdas (I/Os) programaveis;
2 Temporizadores/Contadores de 8 bits com Prescaler;
Contador de tempo real (com cristal externo de 32.768Hz);
3 canais PWM;
6 canais A/D com precisao de 10bits;
Interface para dois fios orientada a byte, compatıvel com o protocolo I2C;
1Firmware e o conjunto de instrucoes operacionais programadas diretamente no hardware de umequipamento eletronico
2MIPS - Milhoes de instrucoes por segundo

4.3 SISTEMA DE CONTROLE MICROCONTROLADO 21
Interface serial USART;
Watchdog Timer com oscilador interno separado;
1 comparador analogico.
Segundo o datasheet do ATmega8, a principal funcao da Unidade de Processamento
Central (CPU) e garantir a correta execucao do programa, sendo capaz de acessar as
memorias, executar calculos, controlar os perifericos e tratar interrupcoes. Um diagrama
em blocos mais detalhado da CPU do AVR pode ser visto na Figura 16. Nota-se que tal
configuracao advem da arquitetura Harvard3, pois percebe-se a existencia do barramento
de dados para programa e para dados.
Figura 16: Diagrama em blocos da CPU do ATmega8.
Fonte: ATMEL
Para possibilitar o desenvolvimento do prototipo, foi necessaria a montagem inicial
de alguns dispositivos para compor a infra-estrutura basica. O primeiro passo consistiu a
construcao de um gravador baseado na arquitetura do AVR910 (Atmel, 2002), seguindo as
modificacoes de firmware propostas por Leidinger (2007) e incorporando uma comunicacao
3E uma arquitetura de computador que se distingue das outras por possuir duas memorias diferentese independentes em termos de barramento e ligacao ao processador. E utilizada nos microcontroladores,tem como pricipal caracterıstica acessar a memoria de dados separadamente da memoria de programa.

4.3 SISTEMA DE CONTROLE MICROCONTROLADO 22
USB baseada no chip FT232R fabricado pela FTDI e implementado pela TATO em um
kit de montagem compacta e de facil acesso, tal etapa foi realizada no ano de 2009, em um
projeto de iniciacao cientıfica denominado “Desenvolvimento de Sistemas Dedicados ao
Controle e Aquisicao de Dados”(PRADO, I.F., KASCHNY, J. R. A.,2009). O diagrama
esquematico deste gravador e mostrado na Figura 17 juntamente com uma foto de sua
montagem.
Figura 17: Programador AVR-910-USB.
Fonte: PRADO, I.F., KASCHNY, J. R. A., 2009
As vantagens de tal programador sao muitas, entre elas destacamos a rapidez do pro-
cesso de gravacao/leitura e o fato de dispensar alimentacao externa. Adicionalmente cabe
mencionar que, para o desenvolvimento dos programas que serao gravados nos microcon-
troladores (firmware), empregamos a plataforma, BASCOM AVR (versao 1.11.8.3), que
possibilita tais implementacoes usando uma variante da linguagem Basic.
Dando continuidade no estudo de circuitos microcontrolados, utilizou-se parte do
circuito de aquisicao de dados exposto no trabalho de Prado em 2009, com as devidas
modificacoes para a adequacao ao sistema proposto.
O circuito projetado na Figura 18 e responsavel pela comunicacao, controle e envio
dos sinais para o acionamento do motor de passos.
Como proposto, pode-se realizar a comunicacao com o computados atraves de duas

4.3 SISTEMA DE CONTROLE MICROCONTROLADO 23
formas, serial e USB. No presente momento optamos por utilizar a comunicacao USB,
pois fornece maior versatilidade e atualmente esta disponıvel em todos os computadores.
No circuito projetado pode-se escolher o tipo de comunicacao apenas modificando os
“JUMPERS RS232/USB”.
A comunicacao do circuito com o computador e gerenciada pelo ATmega8, atraves do
firmware dedicado para tal acao (APENDICE B).
O circuito responsavel pelo controle e implementado basicamente pelo microcontro-
lador e componentes necessarios para seu funcionamento. Nesta etapa foi realizado um
firmware dedicado ao controle do processo, em que utiliza-se como entrada o sinal do
sensor de posicao, atraves da entrada analogica. O microcontrolador e responsavel por
calcular por meio do algoritmo do controlador PID, uma acao corretiva enviada para o
motor de passos (pinos D0 ao D4).
Figura 18: Circuito Pendulo Invertido.
Fonte: Propria

24
5 CARACTERIZACAO DO SISTEMA
5.1 PENDULO INVERTIDO
Segundo RIBEIRO (2007), um ensaio pode ser realizado para estimar os parametros do
modelo necessarios ao controle do sistema. Com tal objetivo o conjunto do compartimento
de cartucho foi removido da impressora posicionando assim o pendulo invertido de cabeca
para baixo sobre a borda de um suporte, de forma que o mesmo se movimente como
um pendulo simples. Os ensaios foram realizados posicionando-se a haste na posicao de
180º (ver Figura 19), soltando-a fora da posicao de equilıbrio, para que pudesse realizar
o movimento oscilatorio caracterıstico de um pendulo simples.
Figura 19: Inversao do pendulo invertido (pendulo simples).
Fonte: Propria

5.1 PENDULO INVERTIDO 25
O sinal gerado pelo potenciometro, utilizado como elemento sensor de posicao angu-
lar, foi adquirido com o auxılio do circuito microcontrolado, sendo os resultados obtidos
tracados na Figura 20. Para tal foi necessario a implementacao de um programa especıfico
para a aquisicao e transmissao dos dados para o computador, o firmware em questao esta
detalhado no APENDICE B.
Os dados referentes ao posicionamento da haste sao enviados para um computador, e
sao armazenados em um arquivo de extensao .txt, utilizando a interface de um terminal
de acesso (HyperTerminal).
De posse destes dados pode-se facilmente tracar o grafico abaixo, referente ao movi-
mento real da haste do pendulo.
Figura 20: Grafico do movimento do Pendulo Simples.
Fonte: Propria

5.2 MOTOR DE PASSO 26
De posse dos dados obtidos no ensaio pode-se calcular os parametros do modelo real,
para tanto foi desenvolvido um programa em ambiente MATLAB, o qual registra os picos
maximos do sinal resultante do ensaio para processamento das informacoes obtidas, e
identifica os parametros:
ωn: Frequencia natural nao amortecida;
ζ: Coeficiente de amortecimento;
ωd: Frequencia natural amortecida;
BR: Constante de amortecimento viscoso do eixo da haste do pendulo.
Inicialmente o programa traca o grafico representado na Figura 20, em seguida identi-
fica os pontos maximos de cada oscilacao, armazenando estes pontos para obter o melhor
ındice da funcao exponencial da equacao geral da resposta senoidal do pendulo simples
(ver Equacao 3.35), para tanto utiliza-se metodos numericos atraves da interpolacao desses
pontos, tendo como base a funcao exponencial.
O programa retorna uma resposta otima do coeficiente exponencial da Equacao 3.35,
que corresponde a:
e−ξωnt = e−0,296 (5.1)
Logo abaixo, tem-se todos os parametros necessarios para a substituicao na Equacao
3.20.
ωn = 6.98[rad/s]
ξ = 0, 0424
Entao a funcao de transferencia do pendulo invertido projetado, fica da seguinte forma:
θ(s)
X(s)=
−5s2
s2 + 0.592s− 48, 72(5.2)
5.2 MOTOR DE PASSO
Para alterar a velocidade do motor de passo e necessario alterar a velocidade de
chaveamento das bobinas do mesmo, quanto maior a velocidade de chaveamento mais

5.2 MOTOR DE PASSO 27
rapido sera a velocidade do motor.
Como explicado no Capitulo 3, o motor de passo apresenta alta taxa de precisao, para
verificar essa caracterıstica foi realizado um ensaio em que foi selecionada a frequencia
de chaveamento e o tempo de funcionamento do motor, ao final com auxılio de uma fita
metrica, verificou-se o deslocamento, conferindo com o resultado teorico.
De acordo com o Datasheet do motor de passo, cada passo equivale a 1.8º, logo para
se ter uma volta completa sao necessarios 200 passos. Uma volta completa equivale a
circunferencia da engrenagem do motor que tem o valor de 4.2 cm.
Logo a expressao para o deslocamento do motor de passo tem a forma da equacao
abaixo.
X = (0.21)(frequencia)(tempo) (5.3)
Com todos os parametros fısicos mapeados matematicamente, pode-se tracar um di-
agrama de blocos do sistema pendulo invertido e motor, que pode ser ilustrado na Figura
21.
Figura 21: Diagrama de Blocos.
Fonte: Propria
Logo em termos matematicos a funcao de transferencia de malha aberta do sistema
completo sera dada pela Equacao 5.4.
G(s) =Θ(s)
F (s)=
0.00021
s.
−5s2
s2 + 0.592s− 48.7204(5.4)
Tal representacao em blocos e comumente utilizada em estudos de controle pois se-
gundo OGATA (2003), esses diagramas descrevem o inter-relacionamento que existe entre
os varios componentes, e o fluxo de sinais entre eles.

28
6 TEORIA DE CONTROLE
6.1 ANALISE DE INSTABILIDADE
De posse dos valores numericos do parametros, adquiridos no capitulo anterior, e
possıvel analisar o comportamento dinamico do sistema. Reconfigurando o diagrama de
blocos ilustrado na Figura 21, tem-se, a funcao de transferencia fatorada para melhor
visualizacao, tal como representada na Figura 22.
Figura 22: Diagrama de blocos fatorado.
Fonte: Propria
Ao analisar o diagrama acima nota-se claramente a existencia de um polo no semi-
plano direito do eixo imaginario, com valor igual a 6.689. Pode-se chegar a esta conclusao
tambem analisando o diagrama de polos e zeros do sistema, ilustrado na Figura 23. Por-
tanto segundo OGATA (2003) esse sistema tem a caracterıstica de instabilidade.

6.2 CONTROLE PID 29
Figura 23: Diagrama de polos e zeros.
Fonte: Propria
Consequentemente, visando a estabilizacao e o controle do sistema, propoe-se o em-
prego de controladores do tipo PID (Proporcional-Integral-Derivativo).
6.2 CONTROLE PID
Controladores do tipo PID sao largamente utilizados na industria e muito utilizados
nas disciplinas de controle na area academica. Tal utilizacao deve-se ao fato deste con-
trolador ser de facil implementacao, de baixo custo e versatil com capacidade de alterar
os comportamentos transitorio e de regime permanente dos processos sob controle.
Atualmente, a maioria dos processos automatizados que utilizam Con-troladores Logicos Programaveis (CLP’s), possuem em suas malhas decontrole algoritmos PID, cabendo aos engenheiros e tecnicos responsaveispelo processo a tarefa de sintonia dos parametros dos controladores.(ASTRON; HAGGLUND, IEEE Press, 1996)
Analisando um sistema generico pode-se observar no diagrama de blocos da Figura
24, uma representacao em malha fechada.
Em geral o controlador apresentado na Figura 24, tem a finalidade de gerar um sinal
de controle u(t) que seja capaz de corrigir e se possıvel anular o erro e(t) gerado entre o

6.2 CONTROLE PID 30
Figura 24: Diagrama de blocos de um sistema de controle em malha fechada.
Fonte: Propria
sinal de referencia r(t) e o sinal de saıda y(t).
No caso particular do controlador PID, a lei de controle descrita pelo bloco do con-
trolador e composta de tres termos, representados na Equacao 6.1.
u(t) = up(t) + ui(t) + ud(t) (6.1)
Cada um dos termos da equacao 6.1 representam individualmente cada um dos tipos
de acoes do controlador. Em nıvel de blocos, o controlador PID apresentado na Figura
24, pode ser representado conforme a Figura 25.
Figura 25: Diagrama de blocos do controlador PID.
Fonte: (PEREIRA, 2003)
O bloco superior, constituıdo de uma constante K, representa a acao proporcional do
controlador, de forma analoga os blocos constituıdos das constantes Ki e Kd, representam
respectivamente as acoes integral e diferencial do controlador. O sinal de saıda destes

6.2 CONTROLE PID 31
blocos sao dados pelas Equacoes 6.2, 6.3 e 6.4 mostradas abaixo.
up(t) = Kpe(t) (6.2)
ui(t) = Ki
∫ t
0
e(t)dt (6.3)
ud(t) = Kdde(t)
dt(6.4)
Onde Kp, KieKd sao os ganhos das parcelas P, I e D, e definem a intensidade de cada
acao.
O efeito de cada uma destas acoes e suas implicacoes no comportamento dinamico
serao apresentados a seguir.
6.2.1 ACAO PROPORCIONAL
A acao de controle gerada pelo modo proporcional e diretamente proporcional a sua
entrada, ou seja, ao sinal de erro em funcao do tempo, como mostrado na Equacao 6.2.
A Figura 26 mostra a relacao entre o sinal de erro e a acao de controle gerada pelo
modo de controle proporcional. Excluıda a faixa de saturacao da variavel manipulada
(sinal de erro fora da banda proporcional), cada valor de erro tem um unico valor corres-
pondente de acao de controle e vice-versa.
Figura 26: Acao de controle gerada pelo controlador proporcional.
Fonte: (FACCIN, 2004)
Como o ganho do controlador e dado pela inclinacao da reta sobre a banda proporci-

6.2 CONTROLE PID 32
onal percentual (BP), a relacao entre ambos e dada pela Equacao 6.5. Esta representacao
e generica para o caso onde a saıda do controlador varia entre 0 e 100%. (FACCIN, 2004)
BP =100
Kp
(6.5)
Neste caso, o controlador age apenas com um amplificador com um ganho constante,
logo, quanto maior o erro maior sera a acao de controle gerada. Assim, ele prove um
rapido ajuste da variavel manipulada, tornando mais rapida a dinamica do processo.
A desvantagem deste tipo de controle e que ele apresenta um erro em regime perma-
nente, esse erro diminui com o aumento do ganho proporcional Kp, com base na Equacao
6.5, porem isto diminui a faixa correspondente a banda proporcional, tornando o contro-
lador mais oscilatorio (sujeito a oscilacoes).
Como pode ser observado na Figura 27, e segundo a Equacao 6.5, quanto maior o valor
de Kp menor a faixa da banda proporcional (BP), e mais oscilatorio o sistema ficara. Na
Figura 27A, com um ganho menor existe uma ampla faixa da banda proporcional, sendo
assim o este sistema e mais lento para atingir a estabilidade abaixo do set point desejado.
Com o aumento de Kp a banda proporcional tende a diminuir fazendo com que o sistema
alcance o set point mais rapido, porem o sistema tende a ficar mais oscilatorio como pode
ser observado na Figura 27C.
Figura 27: Efeito da reducao da BP.
Fonte: (NOVUS, 2003)

6.2 CONTROLE PID 33
6.2.2 ACAO INTEGRAL
A acao de controle gerada pelo modo integral e proporcional a integral do erro no
tempo, como mostrado na Equacao 6.3. O grande benefıcio da sua utilizacao e a eli-
minacao do erro em regime permanente, contudo, ela reduz a estabilidade da malha de
controle (MOORE, 1999).
Esta equacao mostra que a acao de controle depende do historico do erro, desde
que o processo de integracao foi iniciado (t = 0) ate o instante atual. A acao integral
tambem pode ser vista como um mecanismo que atualiza automaticamente o valor base
do controlador com acao proporcional.
A acao integral nao e, isoladamente, uma tecnica de controle, pois nao pode ser
empregado em separado a uma acao proporcional, pois tal acao visa eliminar o desvio
caracterıstico de um controle puramente proporcional.
Na Figura 28A pode-se observar um exemplo de uma resposta de um sistema con-
trolado apenas com a acao proporcional, nota-se que em regime permanente o valor do
set point nao foi atingido, ou seja existe um erro. Utilizando o mesmo sistema agora
com as acoes proporcional e integral juntas (controlador PI), nota-se uma reducao do erro
estacionario, representado na Figura 28B.
Figura 28: Efeito da inclusao do controle integral - PI.
Fonte: (NOVUS, 2003)
A acao integral funciona da seguinte maneira: em intervalos regulares a acao integral
corrige o valor da variavel manipulada somando a esta o desvio do erro (set point - valor
atual). O valor da intensidade da acao integral depende do valor do tempo de integracao
(ti). O valor de ti e uma constante e seu valor e ajustado pelo processo de sintonia do
controlador.

6.2 CONTROLE PID 34
6.2.3 ACAO DERIVATIVA
A acao de controle gerada pelo modo derivativo e proporcional a taxa de variacao
do sinal de erro, ou seja, a sua derivada no tempo, segundo a Equacao 6.4, que es-
tima a tendencia de aumento ou diminuicao do erro futuro. Logo, pela caracterıstica
de antecipacao, aumenta-se a velocidade de correcao do processo, quando sao detectadas
variacoes no sinal de erro. Por causa disso, a acao derivativa e bastante sensıvel a erros
de alta frequencia, como ruıdos de processo e mudancas no valor de referencia da variavel
manipulada.
Durante pertubacoes ou na partida do processo, quando o erro esta variando, o termo
derivativo sempre atua no sentido de atenuar as variacoes, sendo portanto sua principal
funcao melhorar o desempenho do processo durante os transitorios (NISE, 2002).
Nota-se que o modo derivativo somente age quando ha variacao do erro no tempo,
ou seja, se o erro for constante, mesmo que grande, nao ha acao corretiva. Por isso, este
modo nao e utilizado sozinho, mas associado com outros modos de controle.
Assim como a acao integral, o derivativo so pode ser empregado junto a uma acao
proporcional.
Como um exemplo generico, a Figura 29A compara respostas hipoteticas de um pro-
cesso com controle puramente proporcional, e a Figura 29B, mostra o resultado do mesmo
processo com um controlador proporcional-derivativo.
Figura 29: Comparacao de um controle P com um controle PD.
Fonte: (NOVUS, 2003)
Matematicamente, a contribuicao do derivativo no controle e calculada da seguinte
maneira: A intervalos regulares, o controlador calcula a variacao do desvio do processo,
somando a variavel manipulada o valor desta variacao. A intensidade da acao derivativa
e ajustada vaiando-se o intervalo de calculo da diferenca, sendo este parametro chamado

6.3 SINTONIA DE CONTROLADORES PID 35
tempo derivativo (td).
6.3 SINTONIA DE CONTROLADORES PID
Neste trabalho sera implementada uma malha de controle real para o sistema pendulo
invertido utilizando um controlador PID. Tal controlador une as tres tecnicas explicadas
nas secoes anteriores que sao:
1. A acao basica proporcional (P): rapida correcao do erro.
2. A acao basica integral (I): eliminacao do erro estacionario
3. A acao basica Diferencial (D): reducao das oscilacoes.
A uniao destes tres modos basicos de controle contınuo produz um dosmais eficientes algoritmos de controle ja desenvolvidos, o controladorPID, pois ele concilia simplicidade e atendimento as necessidades decontrole para a grande maioria dos casos industriais. (FACCIN, 2004)
Mas, ao passo de se conseguir os benefıcios da coordenacao das acoes de controle,
torna-se relativamente difıcil ajustar a intensidade de cada um dos termos. Um bom
metodo de ajuste de parametros leva em conta varias dessas especificacoes de forma equi-
librada. Apesar da existencia de varios metodos de ajuste, em muitos casos, o ajuste
manual ainda e utilizado, onde os parametros sao ajustados independentemente por ten-
tativa e erro.
Devido a existencia de varias parametrizacoes de controladores e do grande numero
de metodos de ajuste de parametros, e muito importante definir ındices que quantifiquem
a qualidade do comportamento dinamico desempenhado pelo sistema de controle. E
desejavel que o projeto do controlador seja tal que, quando em operacao, ele leve o sistema
a apresentar respostas com valores desejados para estes ındices de qualidade.
A seguir sao detalhados alguns ındices de qualidade classicos, muito dos quais serao
utilizados no projeto dos parametros.
Os principais criterios de desempenho de um sistema de controle sao mostrados a
seguir, todos com base na resposta de um sistema subamortecido tıpico para uma entrada
do tipo degrau unitario, representado na Figura 30, onde pode-se visualizar alguns dos
criterios.

6.3 SINTONIA DE CONTROLADORES PID 36
Figura 30: Curva de resposta a uma entrada em degrau unitario.
Fonte: (OGATA, 2003)
Criterios de desempenho:
Erro em regime permanente (e∞): tambem chamado de offset, e a diferenca
entre o valor em estado estacionario da variavel controlada e o seu valor de referencia.
E altamente desejavel valor nulo, que e conseguido atraves do uso da acao integral
(MARLIN, 1995).
Integral do erro absoluto (IAE): integral do valor absoluto do sinal de erro
no tempo. E equivalente a soma das areas acima e abaixo do valor de referencia
(MARLIN, 1995).
Perıodo de acomodacao (ts): tempo necessario para se ter a resposta no interior
de uma faixa percentual arbitraria do valor estacionario, no caso 5% ou 2%.
Tempo de subida (tr): tempo requerido para que a resposta passe de 0% a 100%
do valor final (OGATA, 2003).
Tempo de pico (tp): tempo para que a resposta atinja o primeiro pico de sobre-
sinal.
Tempo de atraso (ta): tempo requerido para que a resposta alcance 50% de seu
valor final pela primeira vez (OGATA, 2003).

6.3 SINTONIA DE CONTROLADORES PID 37
Maximo de sobre-sinal (Mp): valor maximo de pico da curva de resposta, medido
a partir da unidade (OGATA, 2003).
A seguir serao abordados duas metodologias de sintonia de controladores PID, uma
de forma manual e a outro com base na teoria do lugar das raızes.
6.3.1 METODO DE SINTONIA MANUAL
Normalmente o ajuste fino e manual, e feito pelo metodo de tentativa e erro, aplicando
uma alteracao em um dos parametros do PID e verificando o desempenho do sistema,
ate que o desempenho desejado seja obtido. Para tal e desejavel que o operador tenha
conhecimento do efeito de cada um dos parametros, sobre o desempenho do controle, alem
de experiencia em diferentes processos.
A tabela a seguir resume o efeito de cada um dos parametros sobre o desempenho do
processo.
Tabela 2: Efeito de cada parametro sobre o processo
Parametro Ao aumentar, o processo... Ao diminuir, o processo...Torna-se mais lento. Torna-se mais rapido
Kp Geralmente se torna mais estavel. Fica mais instavelTem menos overshoot. Tem mais overshootTorna-se mais rapido. Torna-se mais lento.
ti Fica mais instavel Fica mais estavelTem mais overshoot Tem menos overshoot
td Torna-se mais lento. Torna-se mais rapido.Tem menos overshoot. Tem mais overshoot
Fonte: (NOVUS, 2003)
6.3.2 SINTONIA PELO METODO DO LUGAR DAS RAIZES
Partindo da funcao de transferencia do controlador PID, dada na Equacao 6.6.
G(s) = Kp(1 +1
tis+ tds) (6.6)
Onde:
Ki =Kp
ti
Kd = Kp.td

6.3 SINTONIA DE CONTROLADORES PID 38
Aqui optou-se por utilizar uma tecnica de sintonia dos parametros do controlador
PID, que relevasse principalmente a resposta a um entrada brusca de um sinal (degrau
unitario). Utilizando os parametros de desempenho como o tempo de acomodacao (ts),
tempo de pico (tp) e o coeficiente de amortecimento (ζ), para se calcular os ganhos do
controlador.
Logo, analisando um sistema generico de segunda ordem, com funcao de transferencia
de malha fechada representada pela Equacao 6.7.
C(s)
R(s)=
ω2n
s2 + 2ζωns+ ω2n
(6.7)
A Equacao 6.7 pode ser reescrita da forma:
C(s)
R(s)=
ω2n
(s+ ζωn + jωd)(s+ ζωn − jωd)(6.8)
Onde ωd e a frequencia natural amortecida do sistema, e tem a forma da seguinte
equacao:
ωd = ωn√
1− ζ2 (6.9)
Dando continuidade, considera-se uma entrada degrau unitario, representado na Equacao
6.10.
C(s) =ω2n
s2 + 2ζωns+ ω2n
1
s(6.10)
Agora utilizando-se do metodo matematico de decomposicao em fracoes parciais, e
posteriormente a efetuacao da transformada inversa de Laplace, a Equacao 6.10, toma a
seguinte forma:
c(t) = 1− e−ζωnt√1− ζ2
sin(ωdt+ tan−1√
1− ζ2ζ
) (6.11)
A partir da Equacao 6.11, pode-se ver que a frequencia da oscilacao transitoria e a
frequencia natural amortecida do sistema (ωn), e assim, varia de acordo com o coeficiente
de amortecimento (ζ).
O valor do erro para esse sistema e a diferenca entre a entrada e a saıda, como

6.3 SINTONIA DE CONTROLADORES PID 39
mostrado abaixo.
e(t) = r(t)− c(t) (6.12)
Logo, se r(t) representa o degrau unitario:
e(t) =e−ζωnt√1− ζ2
sin(ωdt+ tan−1√
1− ζ2ζ
) (6.13)
A Figura 31, mostra uma famılia de curvas c(t) como resposta ao degrau unitario para
diversos valores de ζ.
Figura 31: Curvas de resposta ao degrau unitario do sistema generico de segunda ordem.
Fonte: (OGATA, 2003)
A partir da Figura 31, nota-se que um sistema subamortecido com ζ que varia entre
0.5 e 0.8 se aproxima mais rapidamente do valor final do que um sistema criticamente
amortecido ou superamortecido. Logo propomos o projeto do controlador de forma a
resultar em um sistema subamortecido.
Para o sistema da Equacao 6.7 com raızes expressas por (6.14), existe uma relacao
entre o maximo pico e o fator de amortecimento (ζ), dado pela Equacao 6.15 ou pela
Equacao 6.16, e junto com a frequencia natural de oscilacao (ωn) ha uma relacao tambem

6.3 SINTONIA DE CONTROLADORES PID 40
com o tempo de acomodacao dado pela Equacao 6.17 (RIBEIRO, 2007).
s1,2 = −ζωn ± jωn√
1− ζ2 (6.14)
Mp = e− πζ√
1−ζ2 (6.15)
ζ =
√ln2(Mp)
π2 + ln2(Mp)(6.16)
ts =4
ζωn(6.17)
Como dito anteriormente, busca-se o projeto de um sistema subamortecido, portanto
define-se alguns parametros como sendo:
Mp = 0.08
ts = 0.2
Substituindo esses valores nas Equacoes 6.16 e 6.17, tem-se:
ζ = 0.6266 (6.18)
ωn = 31.92[rad/s] (6.19)
Substituindo os valores das expressoes 6.18 e 6.19, na Equacao das raızes 6.14, tem-se:
s1,2 = −20± j24.887 (6.20)
Agora utilizando o metodo com base no lugar das raızes definido por PHILLIPS
e HARBOR (1991), as equacoes 6.21, 6.22 e 6.23, sao usadas para calcular os ganhos
tıpicos de um controlador PID quando conhecida ou estimada a funcao de transferencia
do processo a ser controlado.

6.3 SINTONIA DE CONTROLADORES PID 41
Kx lims→0
snG(s)H(s) =1
ess(6.21)
Kp =− sin(∠s1 + ∠G(s1)H(s1))
|G(s1)H(s1)|sin(∠s1))− 2Ki cos(s1)
|s1|(6.22)
Kd =sin(∠G(s1)H(s1))
|s1||G(s1)H(s1)| sin(∠s1)+
Ki
|s1|2(6.23)
O objetivo fundamental deste metodo e inserir um polo dominante (s = s1) na funcao
de transferencia de malha fechada. Esta raiz da equacao caracterıstica corresponde a
determinadas especificacoes de performance, explicadas anteriormente.
Para que se possa efetuar o calculo, um dos tres parametros do controlador precisa ser
estimado ou adotado (PHILLIPS; HARBOR, 1991). Apos alguns experimentos praticos
e utilizacao de algumas regras de sintonia manual foi selecionado o valor para o ganho
integral:
Ki = 1000 (6.24)
De posse deste valor e do valor da raiz s1, pode-se facilmente substituir nas Equacoes
6.22 e 6.23 para encontrar os valores:
Kp = 2424.7 (6.25)
Kd = 898.9039 (6.26)
Com o auxılio do programa MATLAB, foi realizada uma rotina para os calculos dos
parametros Kp e Ki e para o fornecimento do novo diagrama do lugar das raızes (Figura
32), sendo apresentada no APENDICE D.

6.3 SINTONIA DE CONTROLADORES PID 42
Figura 32: Lugar das raızes do sistema controlado.
Fonte: Propria

43
7 RESULTADOS
Nas etapas de ajustes e de projeto do controlador foram construıdas rotinas imple-
mentadas no software MATLAB, com finalidade de auxiliar na definicao dos parametros
de precisao, e posteriormente para a avaliacao do sistema projetado.
Para a obtencao dos graficos de desempenho do sistema utilizou-se como entrada um
sinal degrau unitario, para a verificacao da estabilidade resultante. Tais resultados foram
adquiridos com a rotina de calculo executada no software MATLAB.
Observa-se na Figura 33 o deslocamento da haste do pendulo diante de uma entrada
em degrau unitario, tal estabilizacao obedece aos criterios de projeto atingindo a estabi-
lidade em torno de 50 iteracoes.
A Figura 34 mostra o posicionamento do carro quando o sistema e submetido a uma
entrada em degrau unitario.
Desse grafico pode-se perceber que, quando uma entrada em degrau unitario e forne-
cida, o carro tende a se mover primeiro na direcao oposta aquela da entrada por um curto
perıodo e, em seguida, move-se na direcao da entrada.
Apesar de a resposta comecar na direcao negativa e se manter na regiao negativa por
um pequeno perıodo, a resposta volta para a regiao positiva e eventualmente se aproxima
da unidade.
O grafico a segir mostra a velocidade que o carro alcancou para a estabilizacao da
haste na posicao vertical.

7 RESULTADOS 44
Figura 33: Deslocamento da haste.
Fonte: Propria
Figura 34: Posicionamento do carro.
Fonte: Propria

7 RESULTADOS 45
Figura 35: Velocidade do carro.
Fonte: Propria
Analisando os graficos das Figuras 33, 34 e 35, nota-se que os criterios de estabilidade,
tempo de acomodacao e taxa de maximo sobre sinal que foram projetados, sao realmente
encontrados no sistema projetado. Sendo assim esses graficos demonstram a eficiencia do
sistema de controle projetado.
Nota-se ainda que o sistema de controle atua sobre o carrinho (motor), que atraves
do sentido, velocidade e aceleracao, e momento de inercia da haste, exerce uma forca
resultante contraria ao movimento de “queda”, fazendo assim que a mesma fique na
posicao vertical.
Alem das simulacoes computacionais, o prototipo desenvolvido apresentou um desem-
penho razoavel, levando em conta os materiais e custos empregados.
A abordagem empregada utilizando um motor de passos como peca fundamental de
locomocao do carrinho apresentou limitacoes devido a velocidade de chaveamento entre as
bobinas, ou seja, quando se precisa aumentar a velocidade o motor tende a perde torque,
e assim nao consegue girar a carga acoplada. Apos varios testes experimentais limitamos
a velocidade de chaveamento entre as bobinas em torno de 850Hz, como resultado nota-
se que o sistema consegue corrigir apenas pequenas variacoes na angulacao da haste.
Como solucao para tal deficiencia poderia ser utilizado um motor CC em substituicao do

7 RESULTADOS 46
motor de passos, para tanto ja seria necessario uma etapa de usinagem de pecas para o
acoplamento do motor CC a planta projetada, alem de uma modificacao no firmware para
a implementacao de um sistema PWM (Pulse-width modulation) para o acionamento do
motor.
Um outro fato que acrescenta um tempo de atraso ao sistema e fruto da conversao do
sinal analogico, gerado no sensor de posicao, pois esta conversao e realizada a uma taxa
maxima de 200kHz (ATMEL, ), enquanto o programa executado no microcontrolador
executa a uma taxa maxima de 7,3728 MHz. Uma alternativa para a reducao dessa
latencia1 seria a utilizacao de um sensor que oferecesse uma resposta de forma digital, tal
como um encoder absoluto.
A seguir sera apresentada um lista contendo todos os resultados adquiridos ao longo
do trabalho.
1. Prototipo fısico do pendulo invertido;
2. Circuito eletronico de acionamento do motor de passo;
3. Circuito eletronico de aquisicao de dados via microcontrolador;
4. Firmware dedicado a aquisicao de dados utilizando o microcontrolador ATmega8;
5. Projeto do controlador PID;
6. Arquivos (.m) com finalidade de auxiliar no projeto de controladores PID;
7. Firmware com algoritmo PID para microcontrolador ATmega8;
8. Pendulo Invertido microcontrolado utilizando o algoritmo de controle PID.
1Latencia: e a diferenca gerada entre o tempo de conversao do sinal analogico e o tempo de execucaodo programa. Ou e a diferenca de tempo entre o inıcio de um evento e o momento em que seus efeitostornam-se perceptıveis.

47
8 CONCLUSAO
A compilacao de informacoes presente neste trabalho de conclusao de final de curso, e
resultado de um processo de pesquisa iniciado no ano de 2008. Logo apresenta uma vasta
informacao do funcionamento e construcao de um sistema tao estudado em tecnicas de
controle, mais recentemente sendo aplicado a construcao civil e a robotica.
Os resultados inicialmente propostos foram alcancados de forma satisfatoria, atende-
ram aos requisitos definidos ao longo da elaboracao do projeto.
O projeto fısico e logico ocorreu dentro da normalidade, ressaltando o emprego de
pecas (mecanicas e eletronicos) nao ideais para tal aplicacao, devido a dificuldade de
acesso aos componentes.
A simulacao computacional foi de grande valia, pois proporcionou o correto dimensi-
onamento do parametros de controle.
Os resultados preliminares adquiridos indicam o potencial uso desse sistema na im-
plementacao de experiencias praticas em disciplinas de controle do curso de engenharia
eletrica do IFBA.
Como sugestoes de trabalhos futuros, o sistema construıdo podera sofrer alteracoes
no sensor de angulacao da haste, sendo alterado para um potenciometro de precisao ou
ate mesmo um encoder absoluto, alem da mudanca do motor de passo por um motor
de corrente contınua com acionamento em PWM. E seguindo a tendencia de controle
inteligente, buscar a implementacao de ouras estrategias de controle, como logica fuzzy,
algoritmos geneticos, etc.

48
REFERENCIAS
ASTRON, K. J.; HAGGLUND, T. ”PID Control”, The Control Handbook, IEEE Press,1996.
ATMEL. Datasheet ATmega8. [S.l.]. Disponıvel em: <http://www.atmel.com>.
B., L. C. Os poderosos microcontroladores AVR. Florianopolis-SC: IFST, 2009.
BALBINOT. Caminhada em Velocidades Oscilantes: Implicacoes no Modelo do PenduloInvertido. Dissertacao (Mestrado) — Universidade Federal do Rio Grande do Sul, PortoAlegre, 2009.
BERTINI, L. A. Circuitos Eletronicos na Pratica. 1. ed. Sao Paulo: Tec, 2007.
BRITES, F. G.; SANTOS, V. P. de A. Motor de passo. PETele, 2008.
ESTEVES, N. M. Isolamento Sısmico com Sistemas Pendulares com Atrito. Dissertacao(Mestrado) — Instituto Superior Tecnico - Universidade Tecnida de Lisboa, Lisboa.Portugual, 2010.
FACCIN, F. Abordagem Inovadora no Projeto de Controladores PID. Dissertacao(Mestrado) — Universidade Federal do Rio Grande do Sul, Porto Alegre, 2004.
HANSELMAN, D.; LITTLEFIELD, B. MATLAB 6 Curso Completo. 1ª. ed. Sao Paulo:Prentice Hall, 2003.
MARLIN, T. E. Process Control. New York: McGraw-Hill, 1995.
MOORE, C. F. Control Modes - Closed-Loop Response. 3ª. ed. Boca Raton:CRC: [s.n.],1999.
NISE, N. S. Engenharia de Sistemas de Controle. 3ª. ed. Rio de Janeiro: LTC, 2002.
NOVUS, P. E. L. Controle pid basico. 2003.
OGATA, K. Engenharia de Controle Moderno. 4ª edicao. ed. Sao Paulo: [s.n.], 2003.
PEREIRA, L. F. A. Controladores do tipo Proporcional, Integral e Diferencial. RioGrande do Sul: [s.n.], 2003.
PHILLIPS, R.; HARBOR, D. Feedback Control Systems. [S.l.]: Prentice Hall, 1991.
PRADO, I.; FERREIRA, J. Construcao de planta e controle do pendulo invertido.CONNEPI III, Fortaleza, 2008.
PRADO, I.; KASCHNY, J. R. Aplicacao de microcontroladores no manejo de culturasprotegidas. CONNEPI V, Maceio, 2010.

REFERENCIAS 49
PRADO, I. F. do; KASCHNY, J.; DUTRA, V. Desenvolvimento de sistemas dedicadosao controle e aquisicao de dados. In: CONNEPI, I. (Ed.). [S.l.], 2009.
QUEIROZ, R. A. Motores de passo. 2002.
RIBEIRO, R. Implementacao de um Sistema de Controle de um Pendulo Invertido.Dissertacao (Mestrado) — Universidade Federal de Itajuba, Itajuba-MG, 2007.
SANTOS, L. G. Desenvolvimento de hardware e software para experimentos de fısica viaweb. Feira de Santana, 2006. Disponıvel em: <http://physika.info/physika/>.
SOUSA, F. S. Programacao BASIC para Microcontroladores 8051. 1ª. ed. Sao Paulo:Erica, 2006.
50
APENDICE A -- DEMOSTRACAO
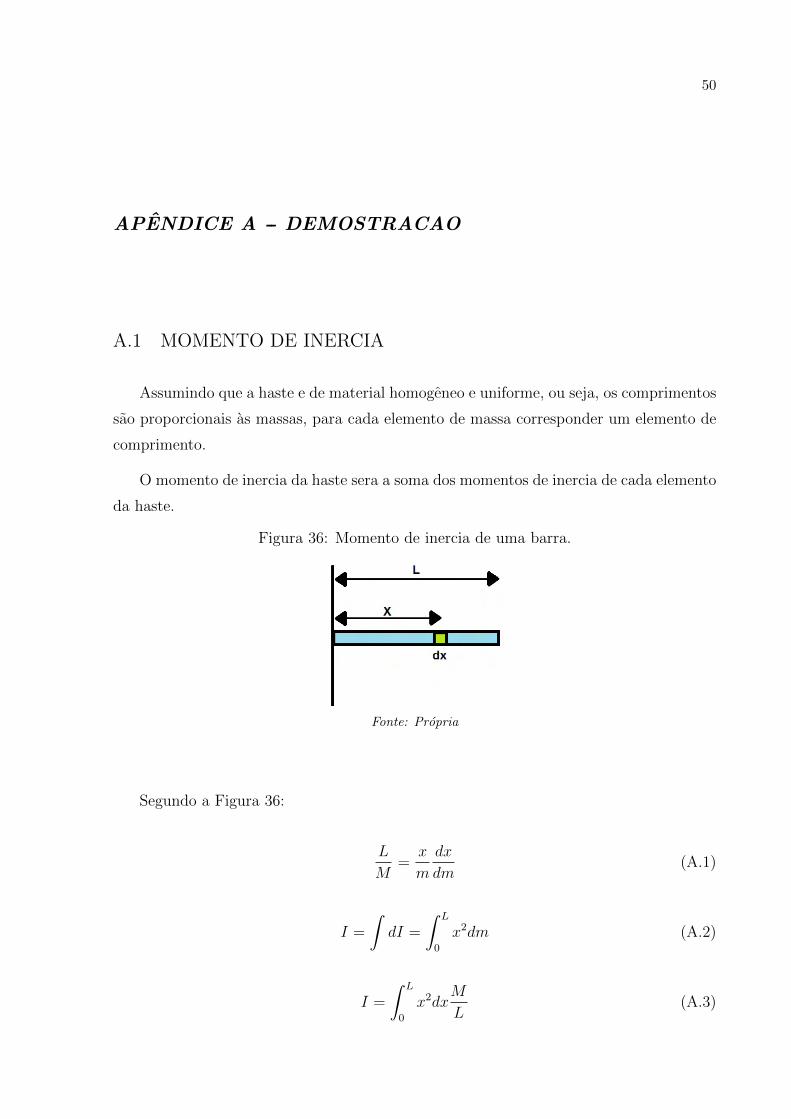
A.1 MOMENTO DE INERCIA
Assumindo que a haste e de material homogeneo e uniforme, ou seja, os comprimentos
sao proporcionais as massas, para cada elemento de massa corresponder um elemento de
comprimento.
O momento de inercia da haste sera a soma dos momentos de inercia de cada elemento
da haste.
Figura 36: Momento de inercia de uma barra.
Fonte: Propria
Segundo a Figura 36:
L
M=
x
m
dx
dm(A.1)
I =
∫dI =
∫ L
0
x2dm (A.2)
I =
∫ L
0
x2dxM
L(A.3)

A.1 MOMENTO DE INERCIA 51
I =M
L
x3
3|L0 (A.4)
I =1
3ML2 (A.5)

52
APENDICE B -- FIRMWARE ATMEGA8
Algoritmo B.1: Calculo dos Parametros
1 'INSTITUTO FEDERAL DA BAHIA
2 'CAMPUS − VIT. DA CONQUISTA
3 'ENGENHARIA ELETRICA
4
5
6 'POR: IGOR F. PRADO
7
8 'ALGORITMO: Comunicacao USB
9
10 $ r e g f i l e = ” m8def .dat ”
11 $ c r y s t a l = 7372800
12 $baud = 115200
13 $hwstack = 32
14 $swstack = 16
15 $ f r ames i z e = 32
16
17 Config Portd.2 = Output
18 Config Portb = Output
19
20 '−−−−t e s t e LED−−−−21 Portd.2 = 1
22 Wait 1
23 Portd.2 = 0
24 '−−−−−−−−−−−−−−−−−25
26 Config Adc = S i n g l e , P r e s c a l e r = Auto , Reference = Avcc
27
28 Dim C As Word
29 Dim A As I n t e g e r
30
31 Star t Adc

APENDICE B -- FIRMWARE ATMEGA8 53
32
33 A = 0
34 Do
35 Waitms 1
36 C = Getadc (1 )
37 Print C
38 A = A + 1
39 Print A
40 Loop Unt i l A = 1000
41 End

54
APENDICE C -- PROGRAMA GERAL MATLAB
Algoritmo C.1: Calculo dos Parametros
1 % IFBA − INSTITUTO FEDERAL DE EDUCACAO E CIENCIA DA BAHIA
2 % Construc ao e Contro le do Sistema Pendulo I n v e r t i d o
3 % Igor F e r r e i r a do Prado
4 %=====================================================
5 %
6
7
8 %%%%%%%%%%%%%%%%%%%%%%%PROGRAMA GERAL%%%%%%%%%%%%%%%%%%%%%%%%%%%
9
10 %−−−−−−−−−−−−−−−−−−−−−−−−11 % arquivo com os dados da medicao do movimento da haste do pendulo
12 % i n v e r t i d o . Essas medi c oes foram r e a l i z a d a s a t rave s do ADC de 10 b i t s do
13 % ATMEGA8 com i n t e r v a l o de medicao de 10 ms. t o t a l i z a n d o 201 medidas
14
15 load movimento.txt −a s c i i %carregamento dos dados do movimento
16 a = movimento ( : , 1 ) ;
17 f s =1/0 .01 ; %taxa de amostragem do s i n a l ;
18 n=s i z e ( a , 1 ) ; %numero de amostras r e c o l h i d a s
19 t =0:0 . 01 : 2 ;
20 g r id on
21 p lo t ( t , 0 .0048828 *a )
22 g r id
23
24 %−−−−−−−−−−−−−−−−−−−−−−−−25
26 % I d e n t i f i c a c a o dos v a l o r e s maximos da amplitude em cada o s c i l a c a o
27
28 y (1 )=a (1) ;
29 y (2 ) =634;
30 y (3 ) =509;
31

APENDICE C -- PROGRAMA GERAL MATLAB 55
32 ganho = y (1) ;
33 %−−−−−−−−−−−−−−−−−−−−−−−−34
35 % Metodo numerico para i d e n t i f i c a c a o do melhor c o e f i c i e n t e
36 % para modelagem da constante de ” decaimento ” do movimento do
37 % pendulo s imp le s
38
39 ganho=y (1) ;
40 %
41 % Calcu lo do melhor c o e f i c i e n t e da func ao do pendulo s imple s
42
43 otimo =0;
44 e r r =10ˆ5;
45 x = ( 1 : l ength ( y ) ) ' ;
46 f o r c t e=−1.25 : 0 .001 : 10 .10
47 g=exp ( c te *(x−1) ) ;
48
49 f o r i =1: l ength ( g )
50 g ( i )=g ( i ) * ganho ;
51 end
52 e r ro =0;
53
54 f o r i =1: l ength ( g )
55 e r ro = ( y ( i )−g ( i ) ) ˆ2 + er ro ;
56 end
57
58 i f e r r > e r ro
59 e r r = er ro ;
60 melhorcte = cte ;
61 end
62 end
63 melhorcte
64 % Gra f i co da e n v o l t o r i a do s i n a l o r i g i n a l
65
66 g=exp ( melhorcte *(x−1) ) ;
67
68 f o r i =1: l ength ( g )
69 g ( i )=g ( i ) * ganho ;
70 end
71
72 f i g u r e
73 hold
74 p lo t ( y )

APENDICE C -- PROGRAMA GERAL MATLAB 56
75
76 p lo t ( g , ' * r ' )
77 g r id on
78 t i t l e ( ' Envo l t o t i a x Funcao Exponencial ' )
79 %−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−80
81 %Def in i c a o dos parametros
82 wn = (2* pi ) /0 .90 %parametro obt ido at rave s da curva [ rd ]
83 %o s c i l a c a o natura l do s i s tema
84 x i = abs ( melhorcte ) /wn %constante de amortecimento
85 l = 0 .15 %metade do comprimento da haste [m]
86 m = 0 .02 %massa da haste [ kg ]
87 Br = 8* x i *wn*m*( l ˆ2) /3 %C o e f i c i e n t e de a t r i t o v i s c o s o [N/rd/ s ]
88 %−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−89
90 %FUNCAO DE TRANSFERENCIA PENDULO FISICO
91 p=(−3/(4* l ) ) *2 .1e −004;
92 p1=2*x i *wn;
93 p2=−wnˆ2 ;
94 num = [ p 0 ] ;
95 den = [ 1 p1 p2 ] ;
96 %−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−97
98 %MODELAGEM EM ESPACO DE ESTADOS
99 [A,B,C,D]= t f 2 s s (num, den ) ;
100
101 T=t f (num, den ) ;
102
103 Tss=s s (T) ; %TRANSFORMACAO P/ ESPACO DE ESTADOS
104
105 Tmf=feedback (T, 1 ) %FUNC DE TRANS MALHA FECHADA
106
107 po le (Tmf) ;
108
109 zero (Tmf) ;
110
111 r l o c u s (Tmf)
112 % LUGAR DAS RAISES
113 g r id on

57
APENDICE D -- PROGRAMA SINTONIA DO
CONTROLADOR PID
Algoritmo D.1: Calculo dos Parametros
1 % IFBA − INSTITUTO FEDERAL DE EDUCACAO E CIENCIA DA BAHIA
2 % Construc ao e Contro le do Sistema Pendulo I n v e r t i d o
3 % Igor F e r r e i r a do Prado
4 % Calcu lo dos parametros do cont ro l ador PID
5 % Metodo do lugar das r a i z e s
6 %=====================================================
7 %
8
9 syms s ;
10 Hs = 1 . 0 ;
11 Mp = 0 .08 ;
12 e s s = 0 .05 ;
13 Ts = 0 . 2 ;
14 %−−−−−−−−−−−−−−−−−−−−15 Gs = (0 .00021 / ( s ) ) * ( (−5* s ˆ2) / ( s ˆ2 + 0 .592 * s − 48 .72 ) ) ;
16 GsHs = (0 .00021 / ( s ) ) * ( (−5* s ˆ2) / ( s ˆ2 + 0 .592 * s − 48 .72 ) ) * Hs ;
17 %LimitGsHs = eva l ( l i m i t (GsHs , s , 0 ) )
18
19 Ki = 1000 %1 / ( LimitGsHs * e s s )
20
21 q s i = s q r t ( ( ( l og (Mp) ) ˆ2) / ( ( p i ˆ2) + ( log (Mp) ) ˆ2) ) ;
22 wn= 4 / (Ts * q s i ) ;
23 s1= −( q s i *wn) + 1 i *wn* s q r t (1− q s i ˆ2) ;
24
25 mod s1=abs ( s1 ) ;
26 ang s1=angle ( s1 ) ;
27
28 mod G s1 = abs ( (0 .00021 / ( s1 ) ) * ( (−5* s1 ˆ2) / ( s1 ˆ2 + 0 .592 * s1 − ...
48 .72 ) ) )

APENDICE D -- PROGRAMA SINTONIA DO CONTROLADOR PID 58
29 ang G s1 = angle ( (0 .00021 / ( s1 ) ) * ( (−5* s1 ˆ2) / ( s1 ˆ2 + 0 .592 * s1 − ...
48 .72 ) ) )
30
31 Ki
32 Kp= ((− s i n ( ang s1 + ( ang G s1 * Hs) ) ) / ( mod G s1 * Hs * s i n ...
( ang s1 ) ) ) − ( (2*Ki* cos ( ang s1 ) ) / mod s1 )
33 Kd= ( (+ s i n ( ang G s1 * Hs) ) / ( mod s1 * mod G s1 * Hs * s i n ( ang s1 ) ) ...
) + ( Ki /( mod s1 ˆ2) )
34
35
36 %=======================================================
37 a=[Kd Kp Ki ] ;
38 %−−−−−−−−−−−−39 b=[0 1 0 ] ;
40
41
42 c =[0 0 0 .00021 ] ;
43 %−−−−−−−−−−−−−−44 d=[0 1 0 ] ;
45
46
47 e=[−5 0 0 ] ;
48 %−−−−−−−−−−−−−−49 f =[1 0 .592 −48 .72 ] ;
50
51 g=conv ( a , c ) ;
52 num=conv ( g , e ) ;
53
54 h=conv (b , d) ;
55 den=conv (h , f ) ;
56
57 %ESPACO DE ESTADOS 610 NISE
58 [A,B,C,D]= t f 2 s s (num, den ) ;
59
60 T = t f (num, den ) ;
61
62 Tss=s s (T) ; %TRANSFORMACAO P/ ESPACO DE ESTADOS
63
64 Tmf=feedback (T, 1 ) %FUNC DE TRANS MALHA FECHADA
65
66 po le (Tmf) ;
67
68 zero (Tmf) ;

APENDICE D -- PROGRAMA SINTONIA DO CONTROLADOR PID 59
69
70 r l o c u s (Tmf) ;
71 % LUGAR DAS RAISES
72
73 v=[−30 30 −30 3 0 ] ;
74 a x i s ( v ) ; a x i s ( ' square ' )
75 g r id ;