guia d'utilizació de patran-nastran 2007
TRANSCRIPT
Mecànica II – Enginyeria Aeronàutica
1/43
NASTRAN powered by PATRAN
Guia d’utilització
PATRAN versió 2007
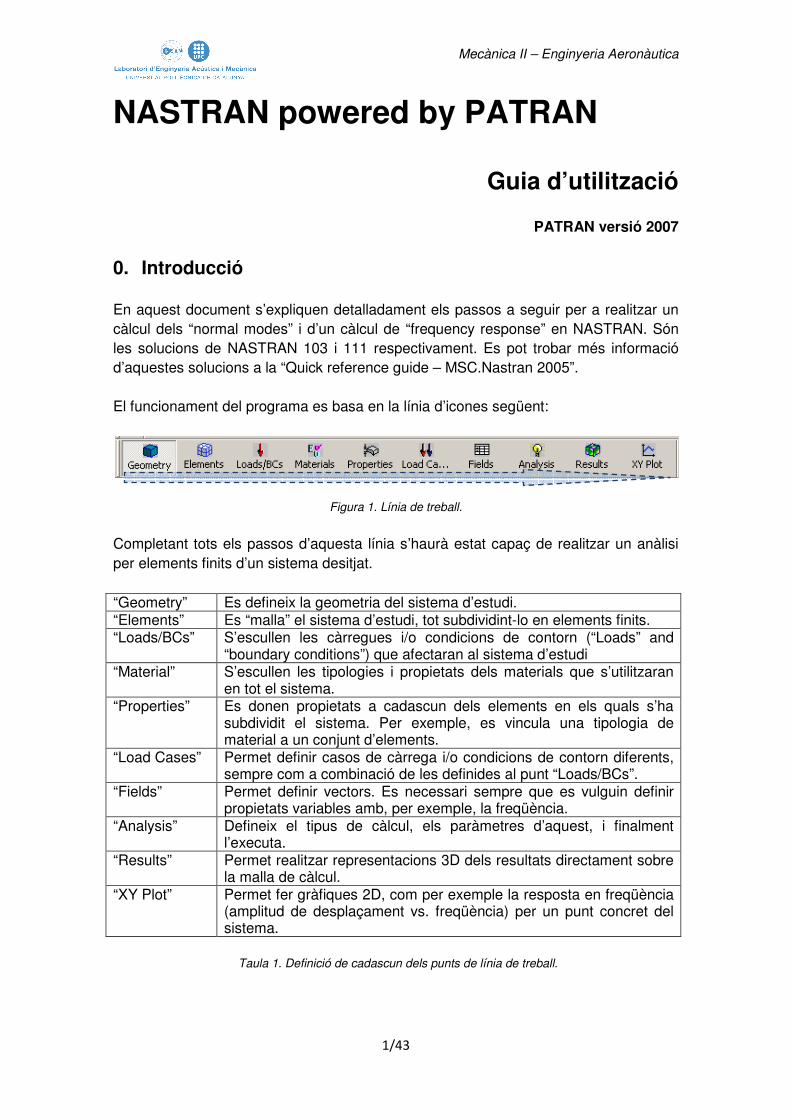
0. Introducció En aquest document s’expliquen detalladament els passos a seguir per a realitzar un càlcul dels “normal modes” i d’un càlcul de “frequency response” en NASTRAN. Són les solucions de NASTRAN 103 i 111 respectivament. Es pot trobar més informació d’aquestes solucions a la “Quick reference guide – MSC.Nastran 2005”. El funcionament del programa es basa en la línia d’icones següent:
Figura 1. Línia de treball.
Completant tots els passos d’aquesta línia s’haurà estat capaç de realitzar un anàlisi per elements finits d’un sistema desitjat. “Geometry” Es defineix la geometria del sistema d’estudi. “Elements” Es “malla” el sistema d’estudi, tot subdividint-lo en elements finits. “Loads/BCs” S’escullen les càrregues i/o condicions de contorn (“Loads” and
“boundary conditions”) que afectaran al sistema d’estudi “Material” S’escullen les tipologies i propietats dels materials que s’utilitzaran
en tot el sistema. “Properties” Es donen propietats a cadascun dels elements en els quals s’ha
subdividit el sistema. Per exemple, es vincula una tipologia de material a un conjunt d’elements.
“Load Cases” Permet definir casos de càrrega i/o condicions de contorn diferents, sempre com a combinació de les definides al punt “Loads/BCs”.
“Fields” Permet definir vectors. Es necessari sempre que es vulguin definir propietats variables amb, per exemple, la freqüència.
“Analysis” Defineix el tipus de càlcul, els paràmetres d’aquest, i finalment l’executa.
“Results” Permet realitzar representacions 3D dels resultats directament sobre la malla de càlcul.
“XY Plot” Permet fer gràfiques 2D, com per exemple la resposta en freqüència (amplitud de desplaçament vs. freqüència) per un punt concret del sistema.
Taula 1. Definició de cadascun dels punts de línia de treball.
Mecànica II – Enginyeria Aeronàutica
2/43
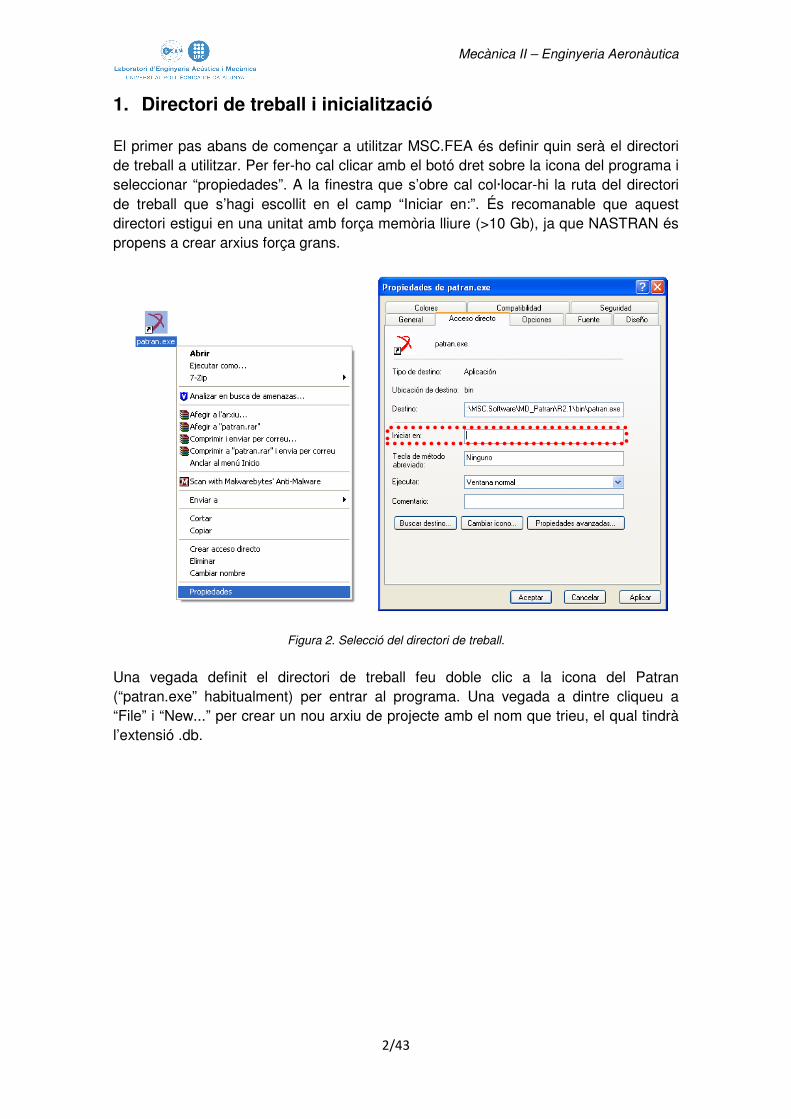
1. Directori de treball i inicialització El primer pas abans de començar a utilitzar MSC.FEA és definir quin serà el directori de treball a utilitzar. Per fer-ho cal clicar amb el botó dret sobre la icona del programa i seleccionar “propiedades”. A la finestra que s’obre cal col·locar-hi la ruta del directori de treball que s’hagi escollit en el camp “Iniciar en:”. És recomanable que aquest directori estigui en una unitat amb força memòria lliure (>10 Gb), ja que NASTRAN és propens a crear arxius força grans.
Figura 2. Selecció del directori de treball.
Una vegada definit el directori de treball feu doble clic a la icona del Patran (“patran.exe” habitualment) per entrar al programa. Una vegada a dintre cliqueu a “File” i “New...” per crear un nou arxiu de projecte amb el nom que trieu, el qual tindrà l’extensió .db.
Mecànica II – Enginyeria Aeronàutica
3/43
2. Geometria i Mallat
El primer pas és generar-nos la geometria de càlcul. Tenim dues opcions: generar-la directament amb el mòduls de geometria i mallat del MSC.FEA o importar un .bdf generat amb CATIA. 2.1. Generació de geometries amb MSC.FEA.
El mòdul de geometria del MSC.FEA permet modelitzar sistemes de poca complexitat però de forma prou eficient. Comencem seleccionant la icona “Geometry” per tal de definir la geometria del nostre sistema.
Figura 3. Mòdul de geometria.
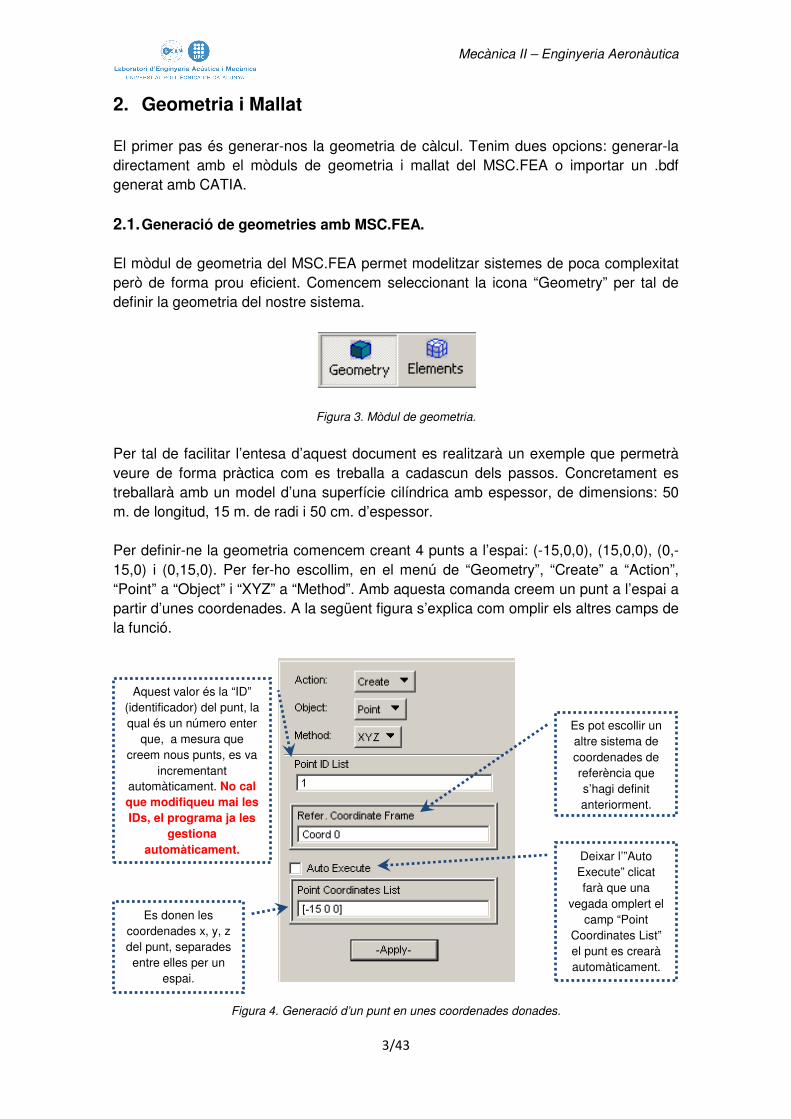
Per tal de facilitar l’entesa d’aquest document es realitzarà un exemple que permetrà veure de forma pràctica com es treballa a cadascun dels passos. Concretament es treballarà amb un model d’una superfície cilíndrica amb espessor, de dimensions: 50 m. de longitud, 15 m. de radi i 50 cm. d’espessor. Per definir-ne la geometria comencem creant 4 punts a l’espai: (-15,0,0), (15,0,0), (0,-15,0) i (0,15,0). Per fer-ho escollim, en el menú de “Geometry”, “Create” a “Action”, “Point” a “Object” i “XYZ” a “Method”. Amb aquesta comanda creem un punt a l’espai a partir d’unes coordenades. A la següent figura s’explica com omplir els altres camps de la funció.
Figura 4. Generació d’un punt en unes coordenades donades.
Es pot escollir un altre sistema de coordenades de referència que s’hagi definit anteriorment.
Aquest valor és la “ID” (identificador) del punt, la qual és un número enter
que, a mesura que creem nous punts, es va
incrementant automàticament. No cal
que modifiqueu mai les
IDs, el programa ja les
gestiona
automàticament.
Es donen les coordenades x, y, z del punt, separades entre elles per un
espai.
Deixar l’”Auto Execute” clicat farà que una
vegada omplert el camp “Point
Coordinates List” el punt es crearà automàticament.
Mecànica II – Enginyeria Aeronàutica
4/43
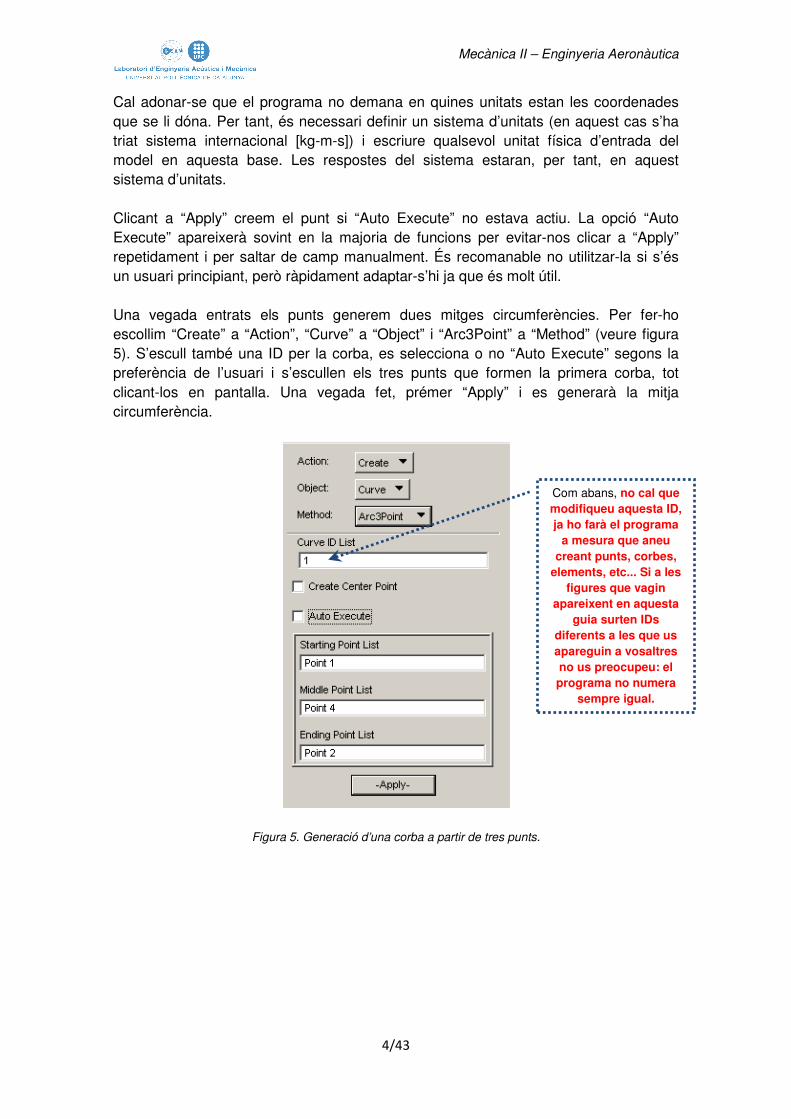
Cal adonar-se que el programa no demana en quines unitats estan les coordenades que se li dóna. Per tant, és necessari definir un sistema d’unitats (en aquest cas s’ha triat sistema internacional [kg-m-s]) i escriure qualsevol unitat física d’entrada del model en aquesta base. Les respostes del sistema estaran, per tant, en aquest sistema d’unitats. Clicant a “Apply” creem el punt si “Auto Execute” no estava actiu. La opció “Auto Execute” apareixerà sovint en la majoria de funcions per evitar-nos clicar a “Apply” repetidament i per saltar de camp manualment. És recomanable no utilitzar-la si s’és un usuari principiant, però ràpidament adaptar-s’hi ja que és molt útil. Una vegada entrats els punts generem dues mitges circumferències. Per fer-ho escollim “Create” a “Action”, “Curve” a “Object” i “Arc3Point” a “Method” (veure figura 5). S’escull també una ID per la corba, es selecciona o no “Auto Execute” segons la preferència de l’usuari i s’escullen els tres punts que formen la primera corba, tot clicant-los en pantalla. Una vegada fet, prémer “Apply” i es generarà la mitja circumferència.
Figura 5. Generació d’una corba a partir de tres punts.
Com abans, no cal que
modifiqueu aquesta ID,
ja ho farà el programa
a mesura que aneu
creant punts, corbes,
elements, etc... Si a les
figures que vagin
apareixent en aquesta
guia surten IDs
diferents a les que us
apareguin a vosaltres
no us preocupeu: el
programa no numera
sempre igual.
Mecànica II – Enginyeria Aeronàutica
5/43
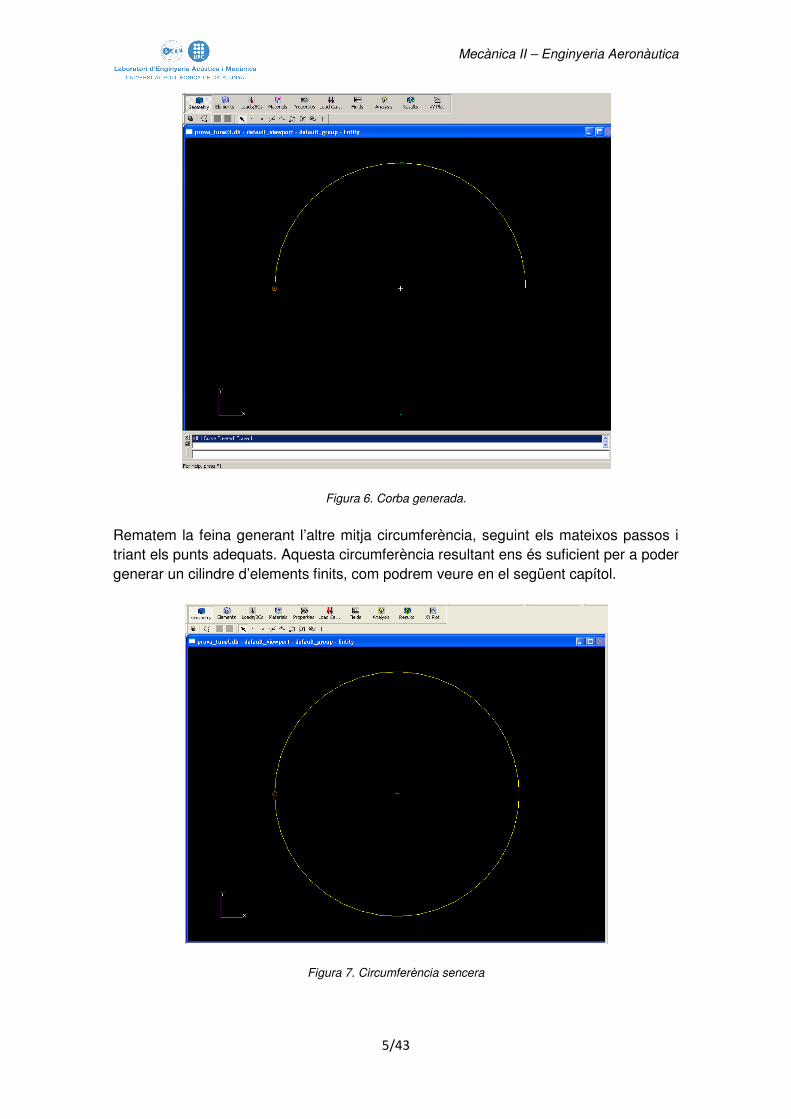
Figura 6. Corba generada.
Rematem la feina generant l’altre mitja circumferència, seguint els mateixos passos i triant els punts adequats. Aquesta circumferència resultant ens és suficient per a poder generar un cilindre d’elements finits, com podrem veure en el següent capítol.
Figura 7. Circumferència sencera
Mecànica II – Enginyeria Aeronàutica
6/43
Per crear qualsevol geometria es tracta d’utilitzar el banc de possibilitats que apareix a “Object” quan tenim el “Create” seleccionat a “Action”. Si ens equivoquem es pot
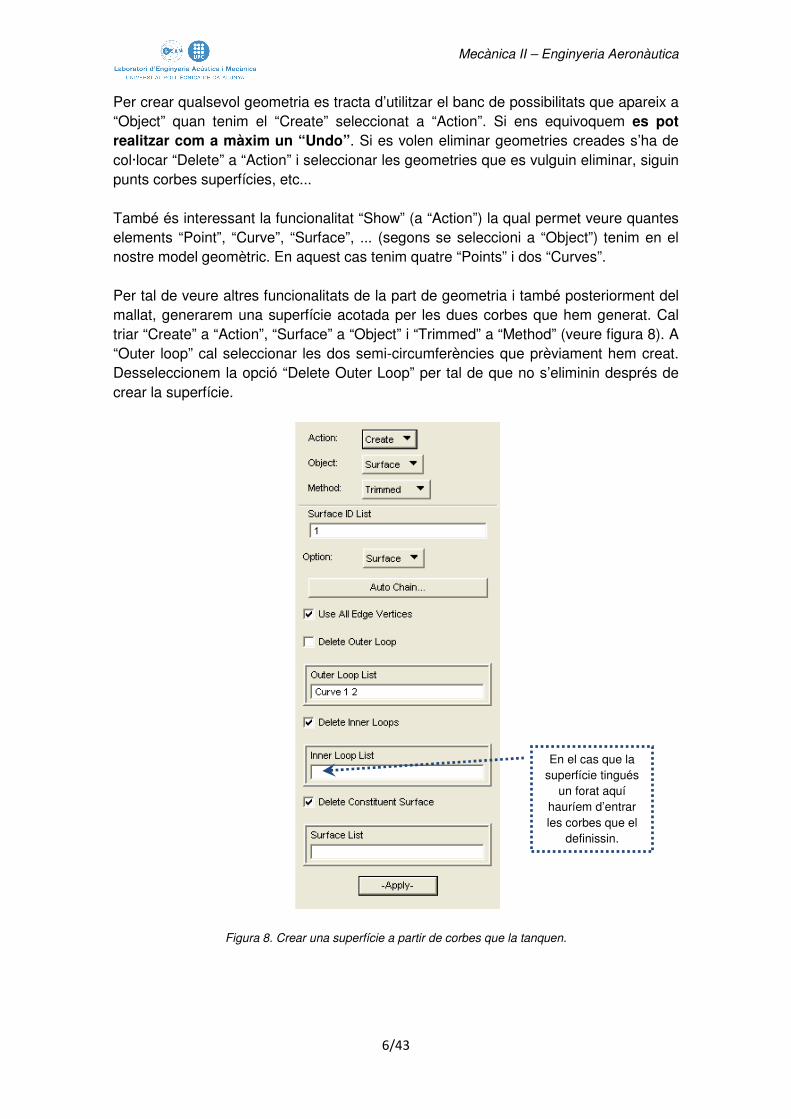
realitzar com a màxim un “Undo”. Si es volen eliminar geometries creades s’ha de col·locar “Delete” a “Action” i seleccionar les geometries que es vulguin eliminar, siguin punts corbes superfícies, etc... També és interessant la funcionalitat “Show” (a “Action”) la qual permet veure quantes elements “Point”, “Curve”, “Surface”, ... (segons se seleccioni a “Object”) tenim en el nostre model geomètric. En aquest cas tenim quatre “Points” i dos “Curves”. Per tal de veure altres funcionalitats de la part de geometria i també posteriorment del mallat, generarem una superfície acotada per les dues corbes que hem generat. Cal triar “Create” a “Action”, “Surface” a “Object” i “Trimmed” a “Method” (veure figura 8). A “Outer loop” cal seleccionar les dos semi-circumferències que prèviament hem creat. Desseleccionem la opció “Delete Outer Loop” per tal de que no s’eliminin després de crear la superfície.
Figura 8. Crear una superfície a partir de corbes que la tanquen.
En el cas que la superfície tingués
un forat aquí hauríem d’entrar les corbes que el
definissin.
Mecànica II – Enginyeria Aeronàutica
7/43
2.2. Generació de mallats amb MSC.FEA.
Figura 9. Mòdul de mallat.
Primer de tot introduirem quines classes d’elements es poden utilitzar per mallar geometries mitjançant la taula 2. La dimensió marca quines geometries es poden mallar amb cada classe d’element. Així una corba només la podrem mallar amb elements Bar, una superfície amb elements Quad o Tria i un volum amb elements Tet, Wedge o Hex. A l’apartat 5 veurem com normalment es treballa amb elements volumètrics i que, per tant, als elements 1D se’ls hi associa una àrea i als elements 2D una espessor. La topologia defineix quants nodes té un element. Així per exemple un Bar2 és una línia amb nodes als seus extrems i en canvi un Bar3 també té un node al seu centre.
Element Dimensió Descripció Topologia
Point 0D Element puntual, sense dimensions. Point
Bar 1D Elements barra. Bar2, Bar3, Bar4
Tria 2D Elements en forma de triangle. Tria3, Tria4, Tria6, Tria7, Tria9, Tria13
Quad 2D Elements en forma de quadrilàter.
Quad4, Quad5, Quad8, Quad9, Quad12, Quad16
Tet 3D Elements en forma de tetraedre. Tet4, Tet10, Tet16
Wedge 3D Elements en forma de cunya. Tres cares quadrilàters i a les
altres dues cares triangles.
Wedge6, Wedge7, Wedge15, Wedge16, Wedge20, Wedge21,
Wedge24, Wedge52
Hex 3D Elements en forma de hexaedre. Hex8, Hex9, Hex20, Hex21, Hex26, Hex27, Hex32, Hex64
Taula 2. Classes d’element finits.
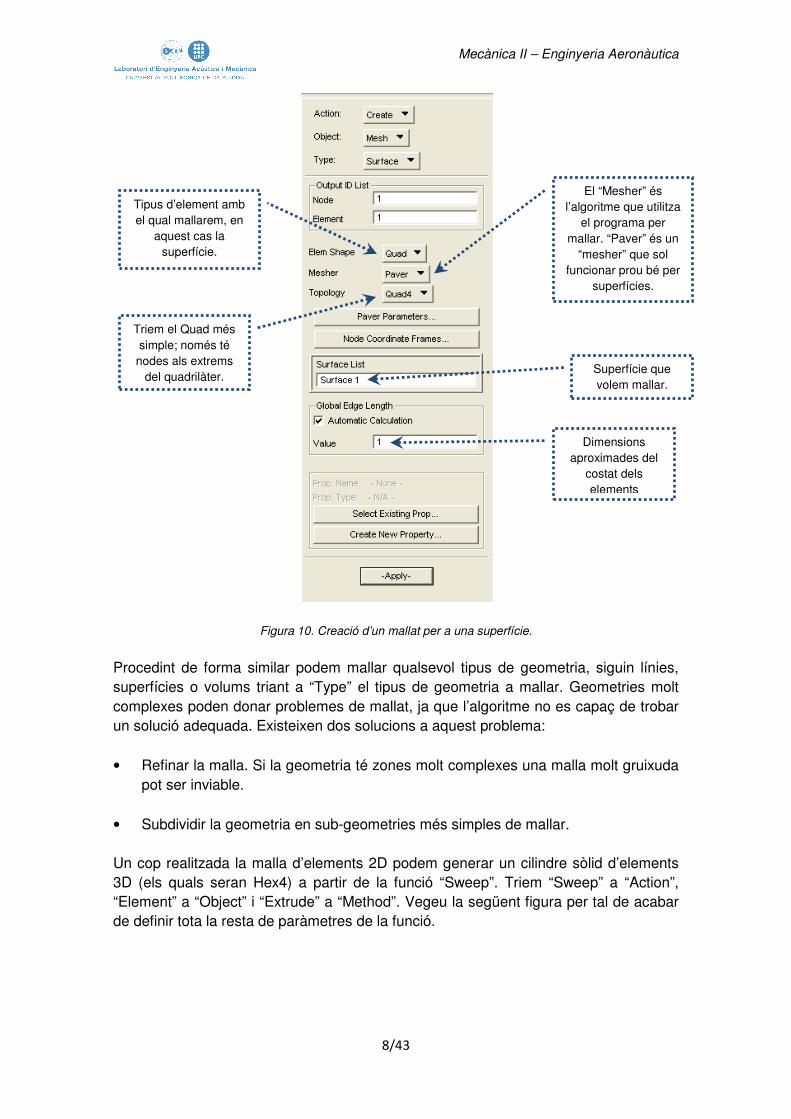
Passem ara a mallar el sistema a partir de les geometries que acabem de definir. Seleccionem el mòdul d’Elements per tal de generar aquestes malles d’elements (figura 9). Començarem per el cas més senzill, el mallat de la superfície circular que hem creat. Triem “Create” a “Action”, “Mesh” a “Object” i “Surface” a “Type”. Escollim elements Quad4 per exemple. Veure figura 10.
Mecànica II – Enginyeria Aeronàutica
8/43
Figura 10. Creació d’un mallat per a una superfície.
Procedint de forma similar podem mallar qualsevol tipus de geometria, siguin línies, superfícies o volums triant a “Type” el tipus de geometria a mallar. Geometries molt complexes poden donar problemes de mallat, ja que l’algoritme no es capaç de trobar un solució adequada. Existeixen dos solucions a aquest problema: • Refinar la malla. Si la geometria té zones molt complexes una malla molt gruixuda
pot ser inviable.
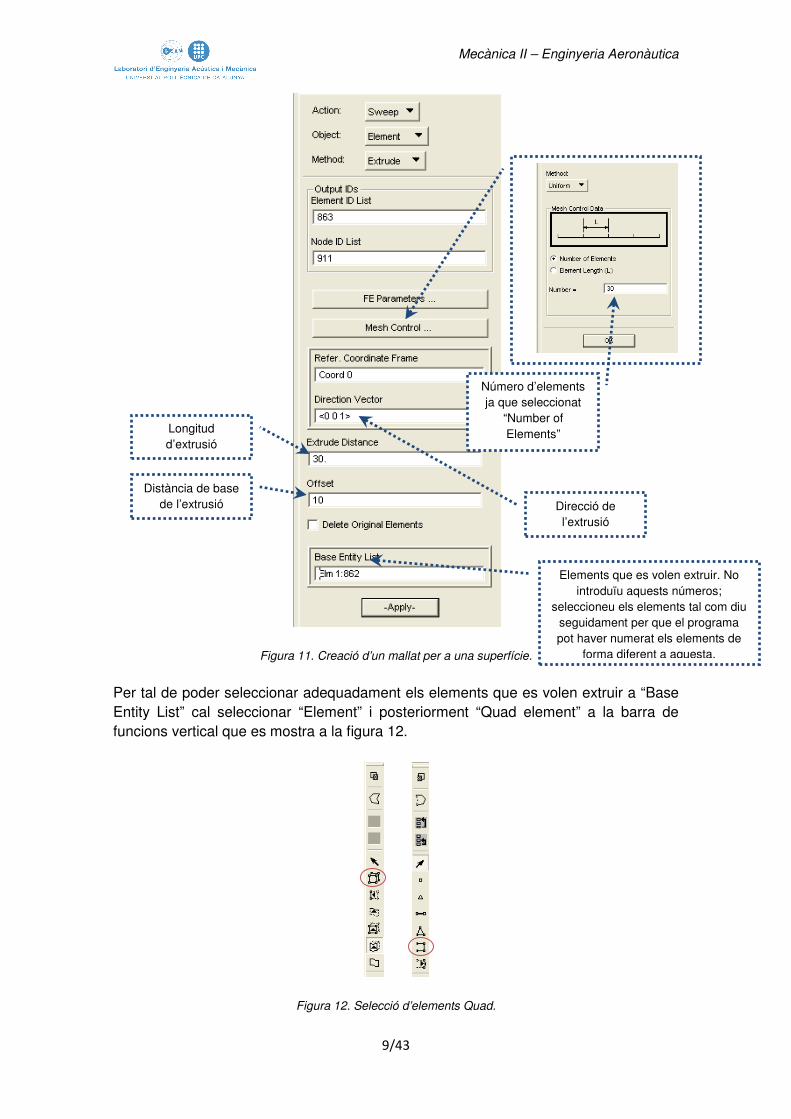
• Subdividir la geometria en sub-geometries més simples de mallar. Un cop realitzada la malla d’elements 2D podem generar un cilindre sòlid d’elements 3D (els quals seran Hex4) a partir de la funció “Sweep”. Triem “Sweep” a “Action”, “Element” a “Object” i “Extrude” a “Method”. Vegeu la següent figura per tal de acabar de definir tota la resta de paràmetres de la funció.
El “Mesher” és l’algoritme que utilitza
el programa per mallar. “Paver” és un
“mesher” que sol funcionar prou bé per
superfícies.
Tipus d’element amb el qual mallarem, en
aquest cas la superfície.
Triem el Quad més simple; només té
nodes als extrems del quadrilàter.
Superfície que volem mallar.
Dimensions aproximades del
costat dels elements
Mecànica II – Enginyeria Aeronàutica
9/43
Figura 11. Creació d’un mallat per a una superfície.
Per tal de poder seleccionar adequadament els elements que es volen extruir a “Base Entity List” cal seleccionar “Element” i posteriorment “Quad element” a la barra de funcions vertical que es mostra a la figura 12.
Figura 12. Selecció d’elements Quad.
Direcció de l’extrusió
Longitud d’extrusió
Distància de base de l’extrusió
Número d’elements ja que seleccionat
“Number of Elements”
Elements que es volen extruir. No introduïu aquests números;
seleccioneu els elements tal com diu seguidament per que el programa pot haver numerat els elements de
forma diferent a aquesta.
Mecànica II – Enginyeria Aeronàutica
10/43
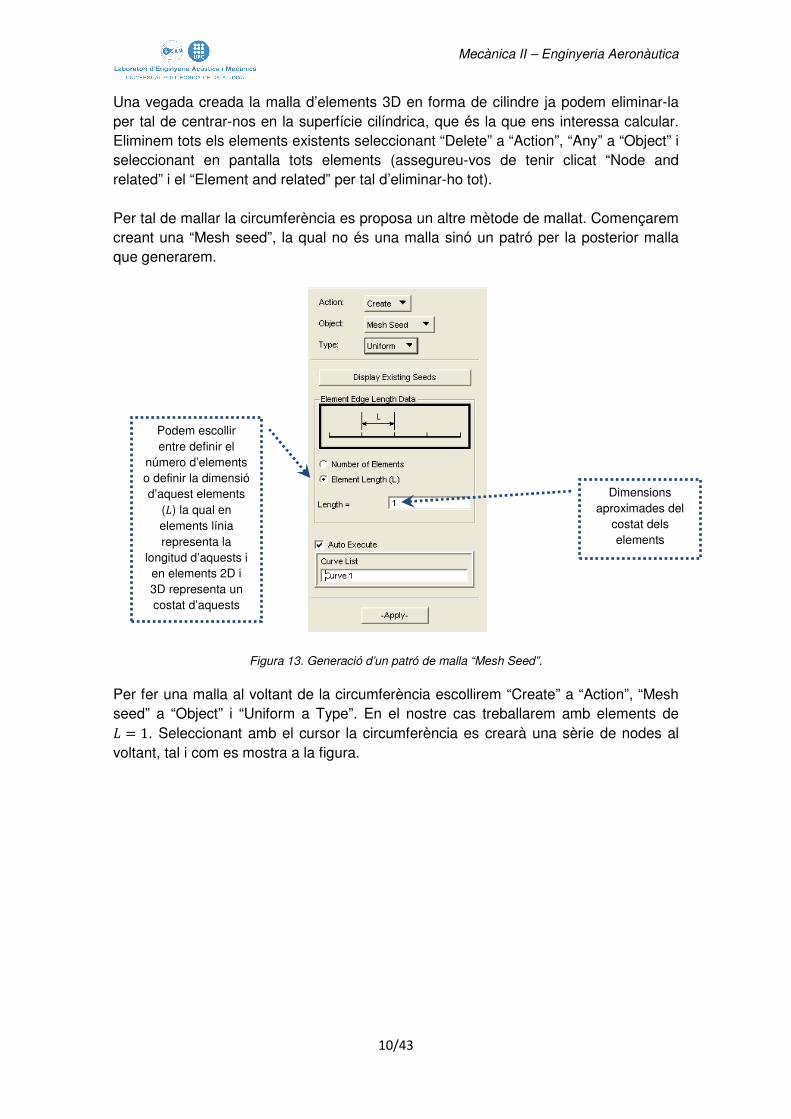
Una vegada creada la malla d’elements 3D en forma de cilindre ja podem eliminar-la per tal de centrar-nos en la superfície cilíndrica, que és la que ens interessa calcular. Eliminem tots els elements existents seleccionant “Delete” a “Action”, “Any” a “Object” i seleccionant en pantalla tots elements (assegureu-vos de tenir clicat “Node and related” i el “Element and related” per tal d’eliminar-ho tot). Per tal de mallar la circumferència es proposa un altre mètode de mallat. Començarem creant una “Mesh seed”, la qual no és una malla sinó un patró per la posterior malla que generarem.
Figura 13. Generació d’un patró de malla “Mesh Seed”.
Per fer una malla al voltant de la circumferència escollirem “Create” a “Action”, “Mesh seed” a “Object” i “Uniform a Type”. En el nostre cas treballarem amb elements de � � 1. Seleccionant amb el cursor la circumferència es crearà una sèrie de nodes al voltant, tal i com es mostra a la figura.
Dimensions aproximades del
costat dels elements
Podem escollir entre definir el
número d’elements o definir la dimensió d’aquest elements
(�) la qual en elements línia representa la
longitud d’aquests i en elements 2D i 3D representa un costat d’aquests
Mecànica II – Enginyeria Aeronàutica
11/43
Figura 14. “Mesh seed” per el nostre cas
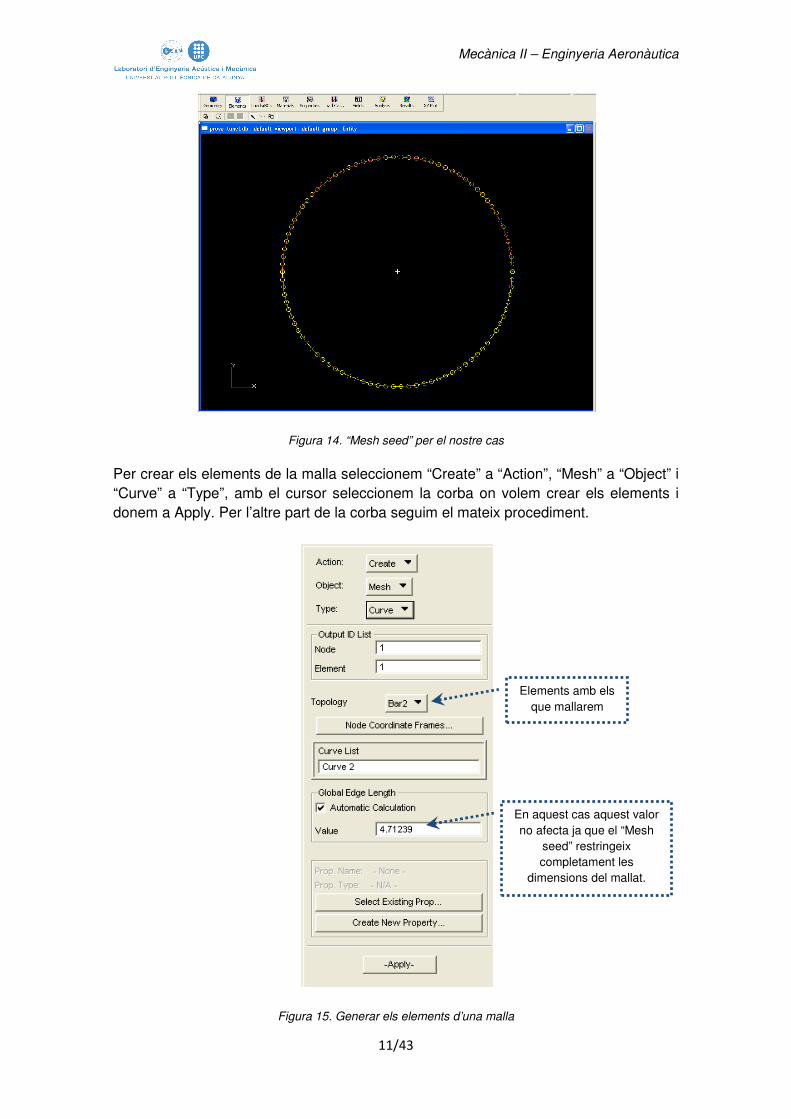
Per crear els elements de la malla seleccionem “Create” a “Action”, “Mesh” a “Object” i “Curve” a “Type”, amb el cursor seleccionem la corba on volem crear els elements i donem a Apply. Per l’altre part de la corba seguim el mateix procediment.
Figura 15. Generar els elements d’una malla
Elements amb els que mallarem
En aquest cas aquest valor no afecta ja que el “Mesh
seed” restringeix completament les
dimensions del mallat.
Mecànica II – Enginyeria Aeronàutica
12/43
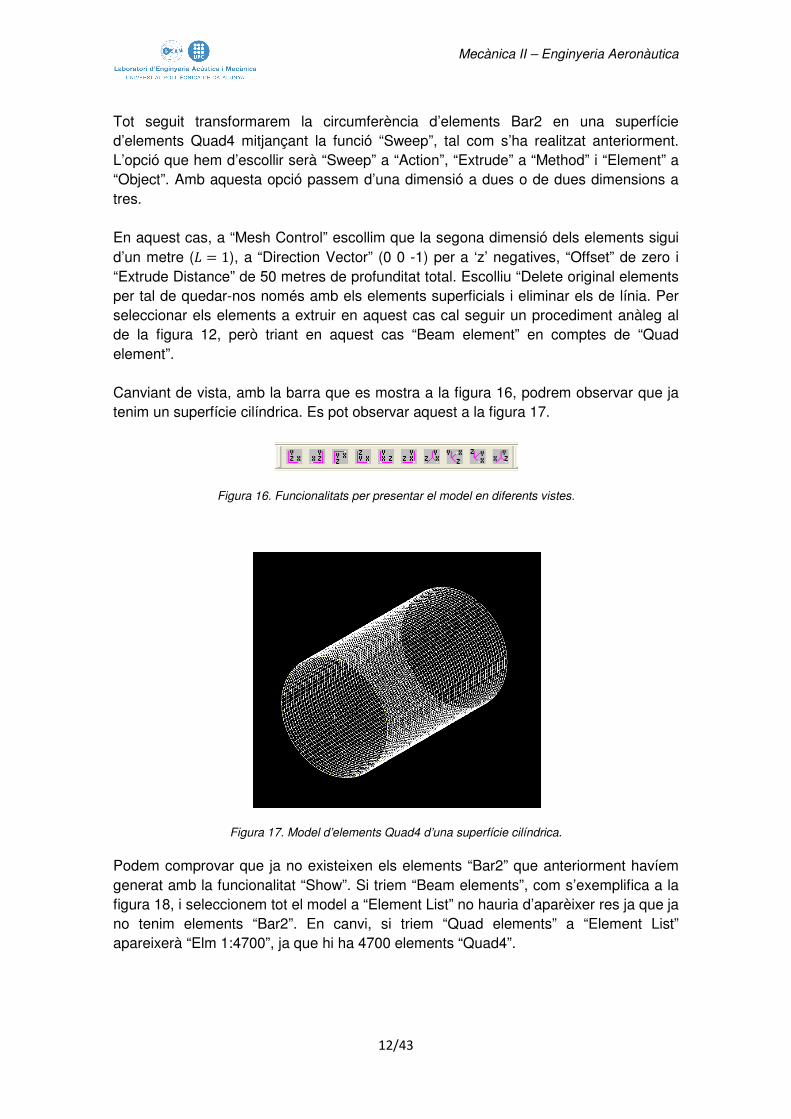
Tot seguit transformarem la circumferència d’elements Bar2 en una superfície d’elements Quad4 mitjançant la funció “Sweep”, tal com s’ha realitzat anteriorment. L’opció que hem d’escollir serà “Sweep” a “Action”, “Extrude” a “Method” i “Element” a “Object”. Amb aquesta opció passem d’una dimensió a dues o de dues dimensions a tres. En aquest cas, a “Mesh Control” escollim que la segona dimensió dels elements sigui d’un metre (� � 1), a “Direction Vector” (0 0 -1) per a ‘z’ negatives, “Offset” de zero i “Extrude Distance” de 50 metres de profunditat total. Escolliu “Delete original elements per tal de quedar-nos només amb els elements superficials i eliminar els de línia. Per seleccionar els elements a extruir en aquest cas cal seguir un procediment anàleg al de la figura 12, però triant en aquest cas “Beam element” en comptes de “Quad element”. Canviant de vista, amb la barra que es mostra a la figura 16, podrem observar que ja tenim un superfície cilíndrica. Es pot observar aquest a la figura 17.
Figura 16. Funcionalitats per presentar el model en diferents vistes.
Figura 17. Model d’elements Quad4 d’una superfície cilíndrica.
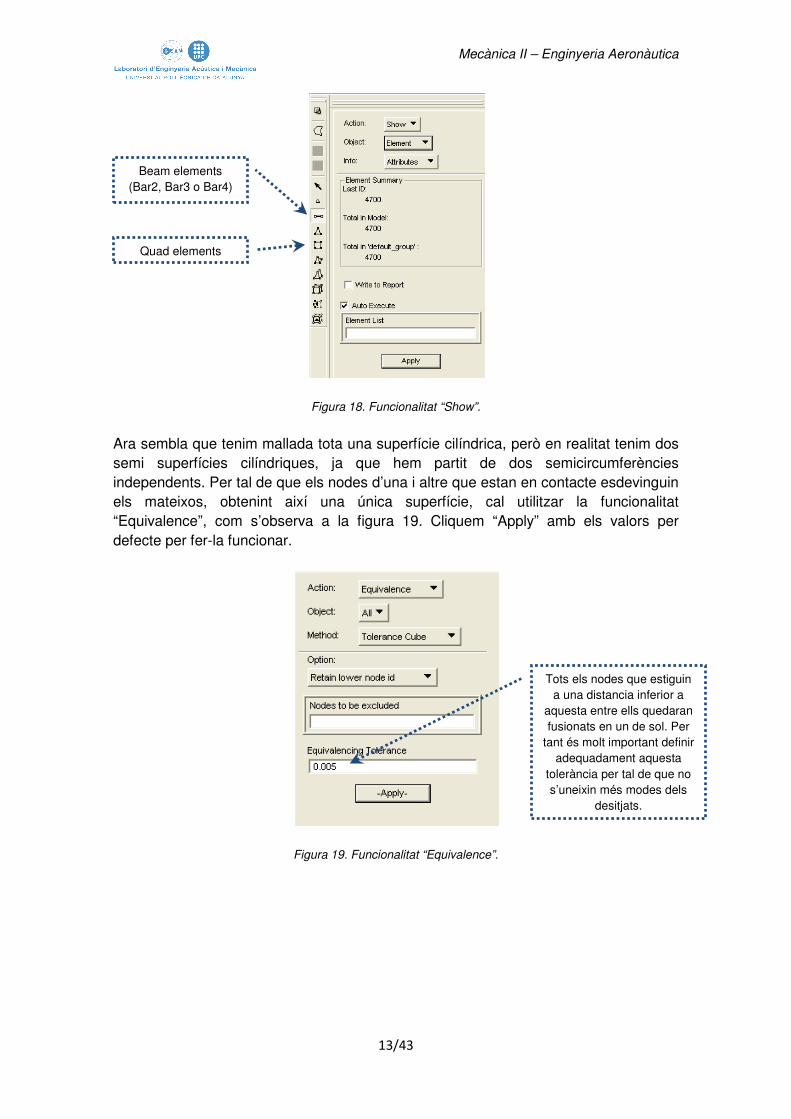
Podem comprovar que ja no existeixen els elements “Bar2” que anteriorment havíem generat amb la funcionalitat “Show”. Si triem “Beam elements”, com s’exemplifica a la figura 18, i seleccionem tot el model a “Element List” no hauria d’aparèixer res ja que ja no tenim elements “Bar2”. En canvi, si triem “Quad elements” a “Element List” apareixerà “Elm 1:4700”, ja que hi ha 4700 elements “Quad4”.
Mecànica II – Enginyeria Aeronàutica
13/43
Figura 18. Funcionalitat “Show”.
Ara sembla que tenim mallada tota una superfície cilíndrica, però en realitat tenim dos semi superfícies cilíndriques, ja que hem partit de dos semicircumferències independents. Per tal de que els nodes d’una i altre que estan en contacte esdevinguin els mateixos, obtenint així una única superfície, cal utilitzar la funcionalitat “Equivalence”, com s’observa a la figura 19. Cliquem “Apply” amb els valors per defecte per fer-la funcionar.
Figura 19. Funcionalitat “Equivalence”.
Beam elements (Bar2, Bar3 o Bar4)
Quad elements
Tots els nodes que estiguin a una distancia inferior a
aquesta entre ells quedaran fusionats en un de sol. Per
tant és molt important definir adequadament aquesta
tolerància per tal de que no s’uneixin més modes dels
desitjats.
Mecànica II – Enginyeria Aeronàutica
14/43
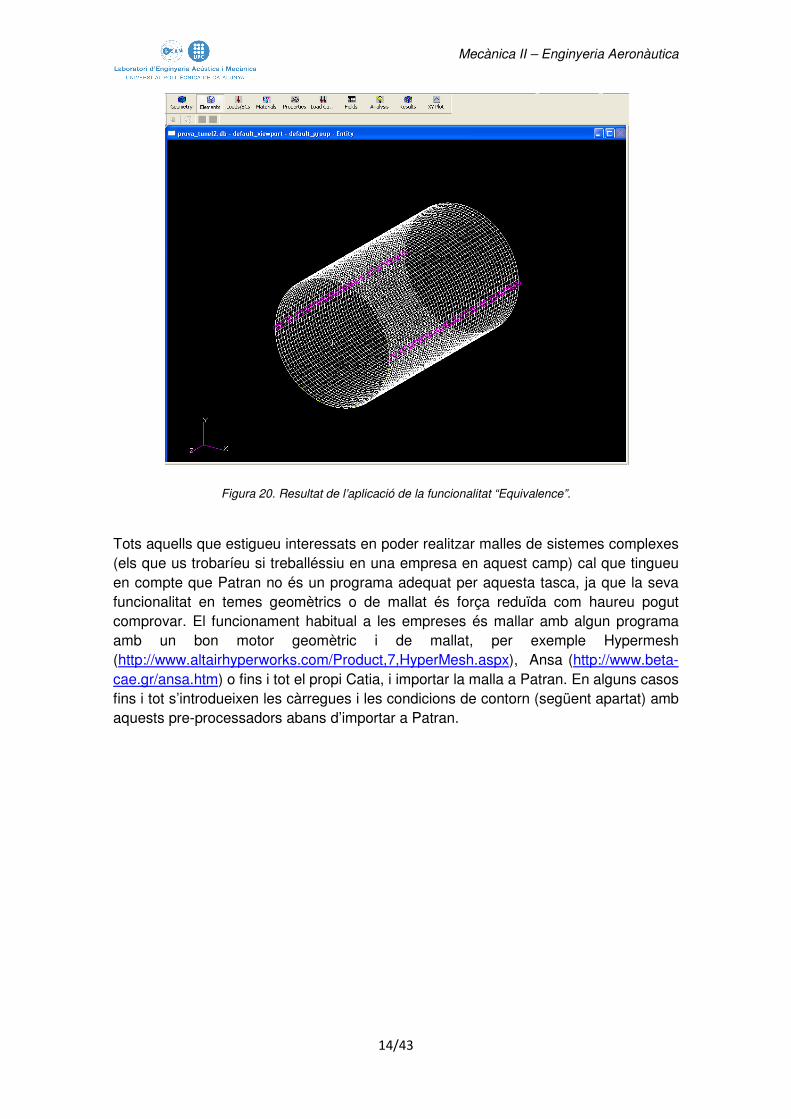
Figura 20. Resultat de l’aplicació de la funcionalitat “Equivalence”.
Tots aquells que estigueu interessats en poder realitzar malles de sistemes complexes (els que us trobaríeu si treballéssiu en una empresa en aquest camp) cal que tingueu en compte que Patran no és un programa adequat per aquesta tasca, ja que la seva funcionalitat en temes geomètrics o de mallat és força reduïda com haureu pogut comprovar. El funcionament habitual a les empreses és mallar amb algun programa amb un bon motor geomètric i de mallat, per exemple Hypermesh (http://www.altairhyperworks.com/Product,7,HyperMesh.aspx), Ansa (http://www.beta-cae.gr/ansa.htm) o fins i tot el propi Catia, i importar la malla a Patran. En alguns casos fins i tot s’introdueixen les càrregues i les condicions de contorn (següent apartat) amb aquests pre-processadors abans d’importar a Patran.
Mecànica II – Enginyeria Aeronàutica
15/43
3. Càrregues i condicions de contorn.
Figura 21. Mòdul de càrregues i condicions de contorn.
En aquest apartat introduirem les condicions de contorn del nostre sistema i també les forces que hi actuaran. 3.1. Càrregues (Loads).
Les càrregues que apliquem sobre un sistema són forces o moments aplicats sobre la malla que s’interpretaran diferent segons el cas de càlcul que estiguem realitzant. Solution type Interpretació de les càrregues Linear Static (Sol. 101) Nonlinear Static (Sol. 106) Buckling (Sol. 105)
Càrregues estàtiques. El valor que col·loquem es constant.
Normal Modes (Sol. 103) Complex Eigenvalues (Sol. 110)
En un càlcul de modes propis no té sentit col·locar càrregues. Si es col·loquen el programa les ignorarà.
Frequency Response (Sol. 111) Càrregues dinàmiques. El valor que col·loquem és l’amplitud d’una càrrega harmònica que oscil·la a la freqüència de càlcul. Si l’amplitud és complexa estem donant un determinat desfasament a aquesta força harmònica. És per tant un espectre de força pla en el rang de freqüències de càlcul. Al ésser un càlcul lineal, es sol treballar amb forces unitàries, per tal de trobar les receptàncies, admitàncies o acceleràncies del sistema.
Transient Response (Sol. 112) Nonlinear Transient (Sol. 129)
Càrregues dinàmiques però no harmòniques a priori. Cal que, a partir d’un “Field”, es defineixi l’evolució temporal de la força al llarg del temps.
Taula 3. Interpretació de la força segons el tipus de càlcul.
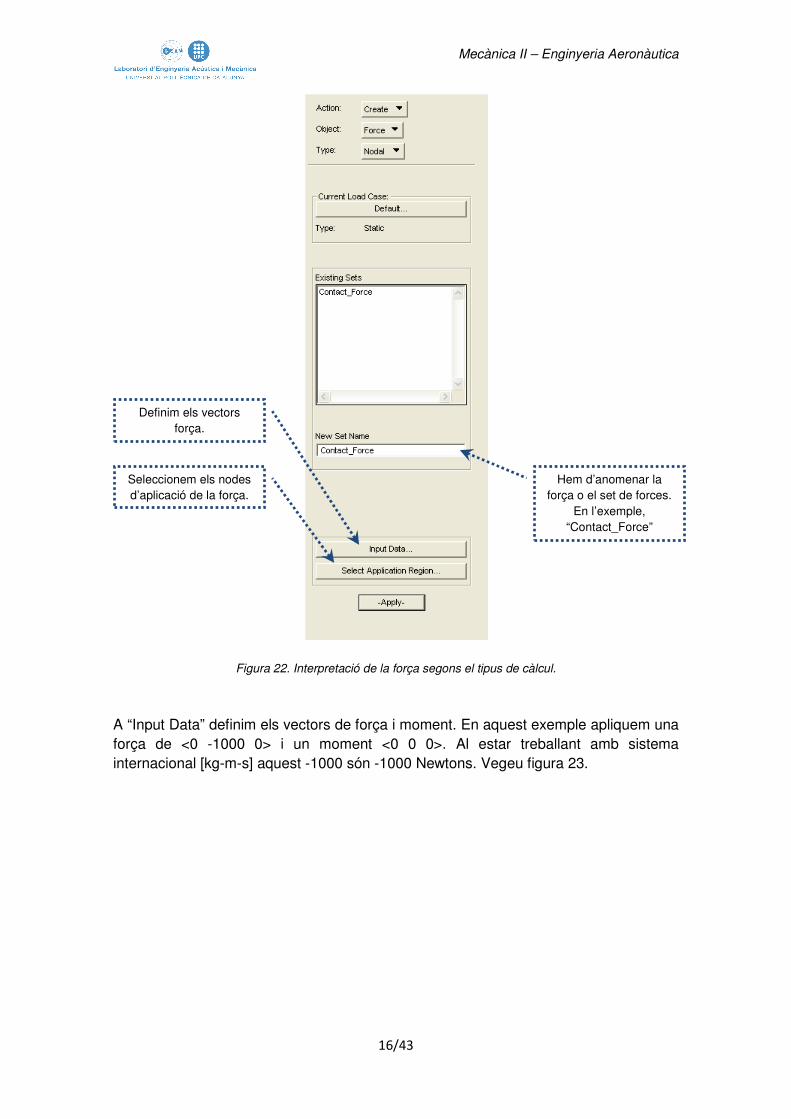
Nosaltres treballarem només amb les solucions 103 i 111, per tant les forces només tindran sentit a la solució 111 i seran harmòniques. En el nostre cas introduirem tot un seguit de forces verticals als nodes de baix de tot del cilindre. Seleccionem “Create” a “Action”, “Force” a “Object” i “Nodal” a “Type”.
Mecànica II – Enginyeria Aeronàutica
16/43
Figura 22. Interpretació de la força segons el tipus de càlcul.
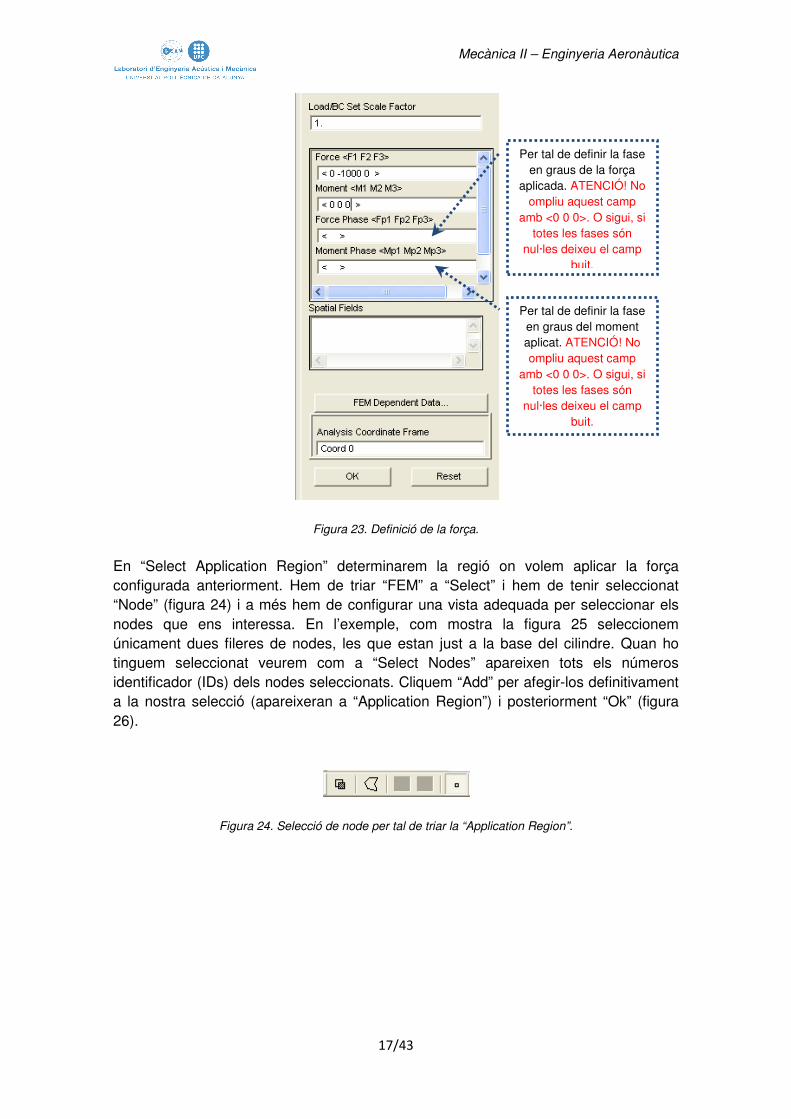
A “Input Data” definim els vectors de força i moment. En aquest exemple apliquem una força de <0 -1000 0> i un moment <0 0 0>. Al estar treballant amb sistema internacional [kg-m-s] aquest -1000 són -1000 Newtons. Vegeu figura 23.
Hem d’anomenar la força o el set de forces.
En l’exemple, “Contact_Force”
Definim els vectors força.
Seleccionem els nodes d’aplicació de la força.
Mecànica II – Enginyeria Aeronàutica
17/43
Figura 23. Definició de la força.
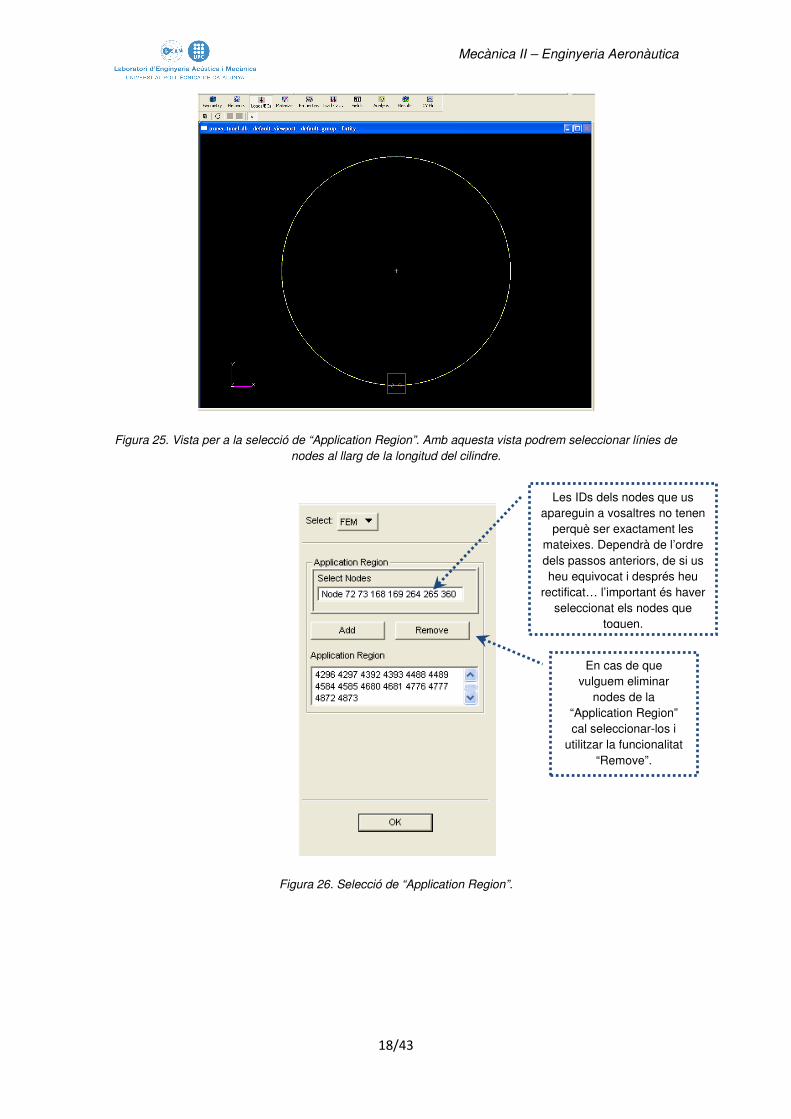
En “Select Application Region” determinarem la regió on volem aplicar la força configurada anteriorment. Hem de triar “FEM” a “Select” i hem de tenir seleccionat “Node” (figura 24) i a més hem de configurar una vista adequada per seleccionar els nodes que ens interessa. En l’exemple, com mostra la figura 25 seleccionem únicament dues fileres de nodes, les que estan just a la base del cilindre. Quan ho tinguem seleccionat veurem com a “Select Nodes” apareixen tots els números identificador (IDs) dels nodes seleccionats. Cliquem “Add” per afegir-los definitivament a la nostra selecció (apareixeran a “Application Region”) i posteriorment “Ok” (figura 26).
Figura 24. Selecció de node per tal de triar la “Application Region”.
Per tal de definir la fase en graus de la força
aplicada. ATENCIÓ! No ompliu aquest camp
amb <0 0 0>. O sigui, si totes les fases són
nul·les deixeu el camp buit.
Per tal de definir la fase en graus del moment aplicat. ATENCIÓ! No ompliu aquest camp
amb <0 0 0>. O sigui, si totes les fases són
nul·les deixeu el camp buit.
Mecànica II – Enginyeria Aeronàutica
18/43
Figura 25. Vista per a la selecció de “Application Region”. Amb aquesta vista podrem seleccionar línies de
nodes al llarg de la longitud del cilindre.
Figura 26. Selecció de “Application Region”.
En cas de que vulguem eliminar
nodes de la “Application Region” cal seleccionar-los i
utilitzar la funcionalitat “Remove”.
Les IDs dels nodes que us apareguin a vosaltres no tenen
perquè ser exactament les mateixes. Dependrà de l’ordre dels passos anteriors, de si us heu equivocat i després heu
rectificat… l’important és haver seleccionat els nodes que
toquen.
Mecànica II – Enginyeria Aeronàutica
19/43
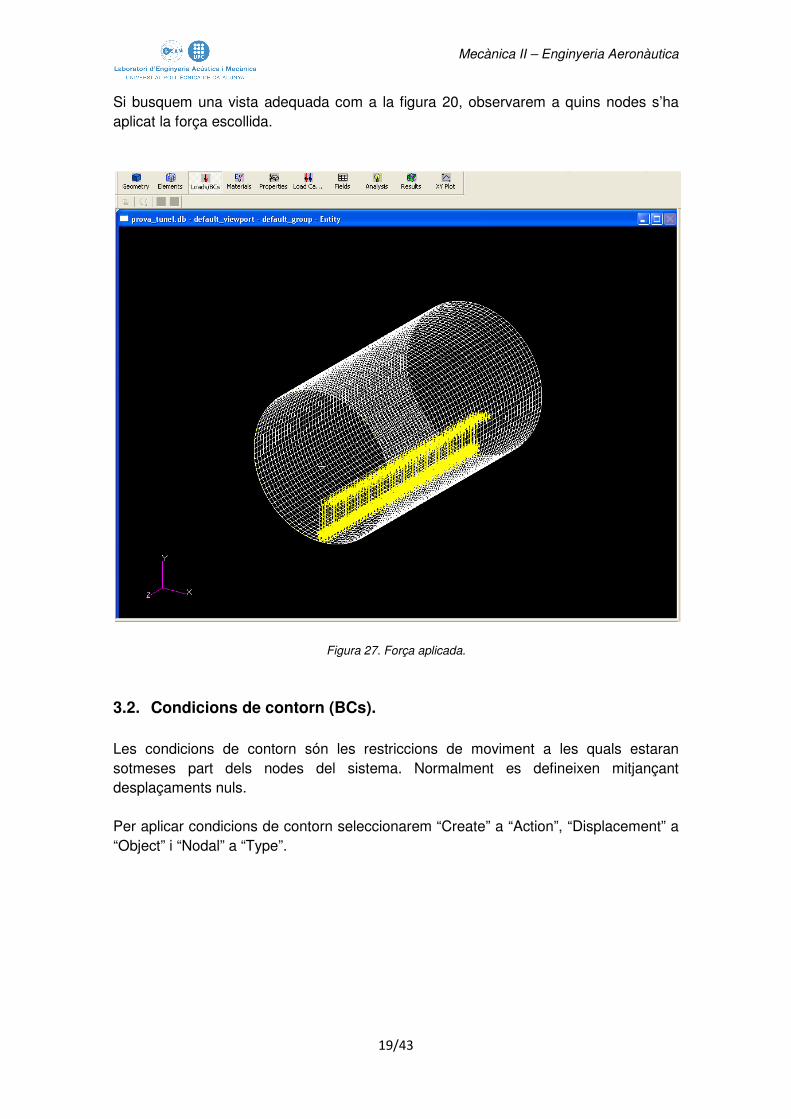
Si busquem una vista adequada com a la figura 20, observarem a quins nodes s’ha aplicat la força escollida.
Figura 27. Força aplicada.
3.2. Condicions de contorn (BCs).
Les condicions de contorn són les restriccions de moviment a les quals estaran sotmeses part dels nodes del sistema. Normalment es defineixen mitjançant desplaçaments nuls. Per aplicar condicions de contorn seleccionarem “Create” a “Action”, “Displacement” a “Object” i “Nodal” a “Type”.
Mecànica II – Enginyeria Aeronàutica
20/43
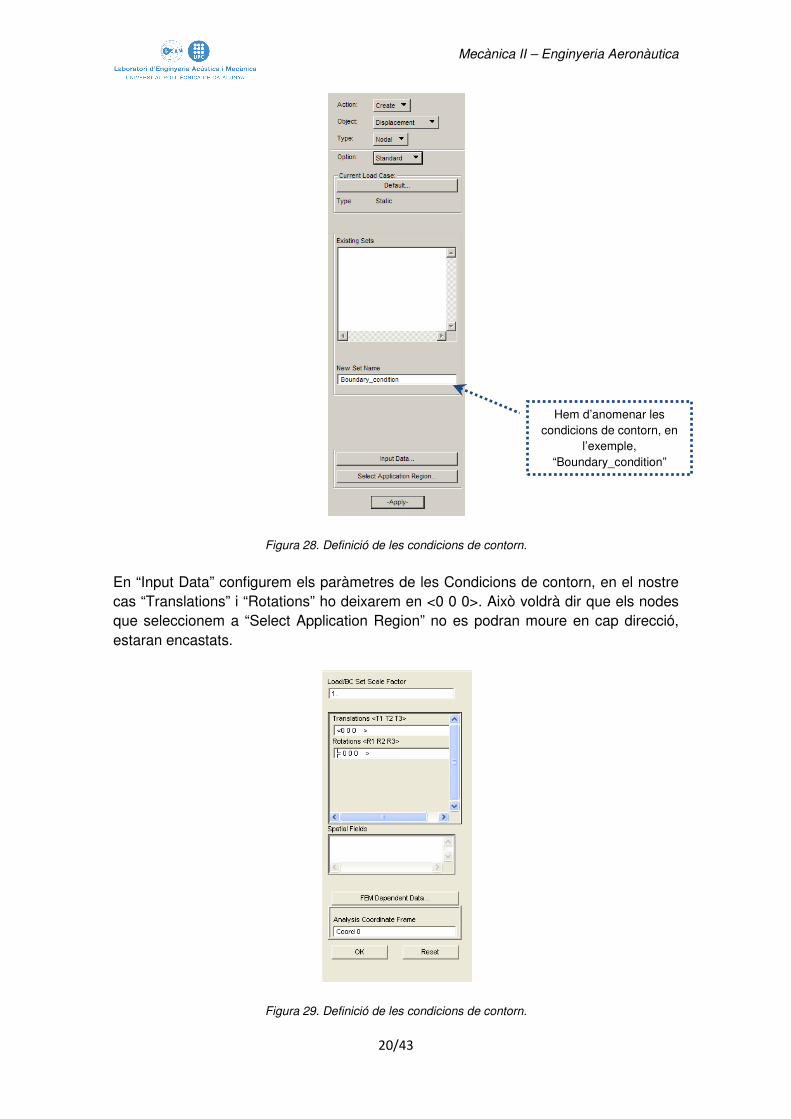
Figura 28. Definició de les condicions de contorn.
En “Input Data” configurem els paràmetres de les Condicions de contorn, en el nostre cas “Translations” i “Rotations” ho deixarem en <0 0 0>. Això voldrà dir que els nodes que seleccionem a “Select Application Region” no es podran moure en cap direcció, estaran encastats.
Figura 29. Definició de les condicions de contorn.
Hem d’anomenar les condicions de contorn, en
l’exemple, “Boundary_condition”
Mecànica II – Enginyeria Aeronàutica
21/43
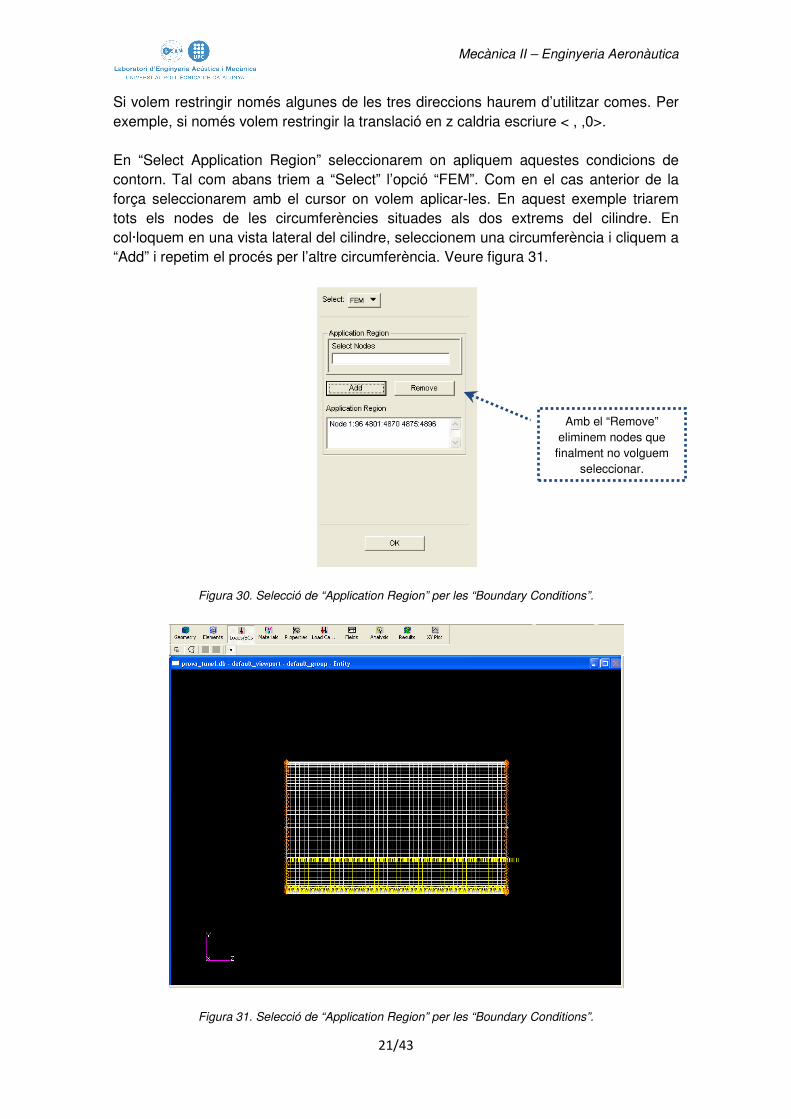
Si volem restringir només algunes de les tres direccions haurem d’utilitzar comes. Per exemple, si només volem restringir la translació en z caldria escriure < , ,0>. En “Select Application Region” seleccionarem on apliquem aquestes condicions de contorn. Tal com abans triem a “Select” l’opció “FEM”. Com en el cas anterior de la força seleccionarem amb el cursor on volem aplicar-les. En aquest exemple triarem tots els nodes de les circumferències situades als dos extrems del cilindre. En col·loquem en una vista lateral del cilindre, seleccionem una circumferència i cliquem a “Add” i repetim el procés per l’altre circumferència. Veure figura 31.
Figura 30. Selecció de “Application Region” per les “Boundary Conditions”.
Figura 31. Selecció de “Application Region” per les “Boundary Conditions”.
Amb el “Remove” eliminem nodes que
finalment no volguem seleccionar.
Mecànica II – Enginyeria Aeronàutica
22/43
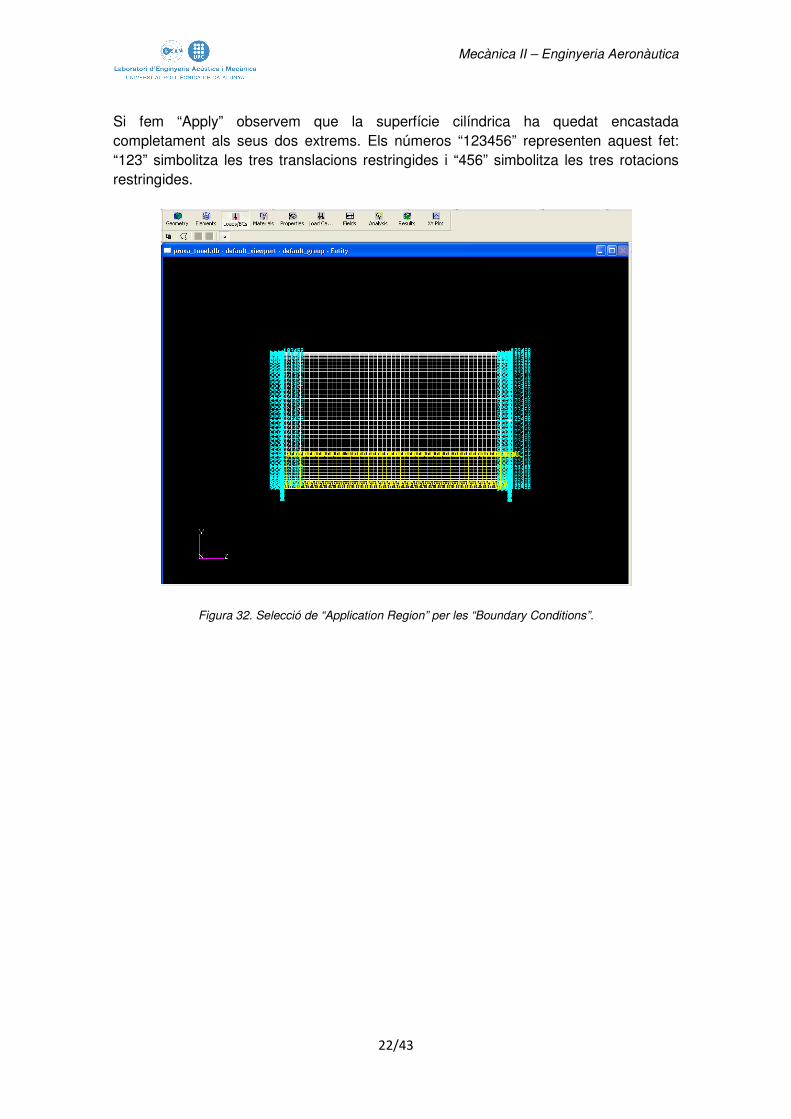
Si fem “Apply” observem que la superfície cilíndrica ha quedat encastada completament als seus dos extrems. Els números “123456” representen aquest fet: “123” simbolitza les tres translacions restringides i “456” simbolitza les tres rotacions restringides.
Figura 32. Selecció de “Application Region” per les “Boundary Conditions”.
Mecànica II – Enginyeria Aeronàutica
23/43
4. Definició de materials i propietats. 4.1. Definició de materials.
Figura 33. Mòdul de definició de materials.
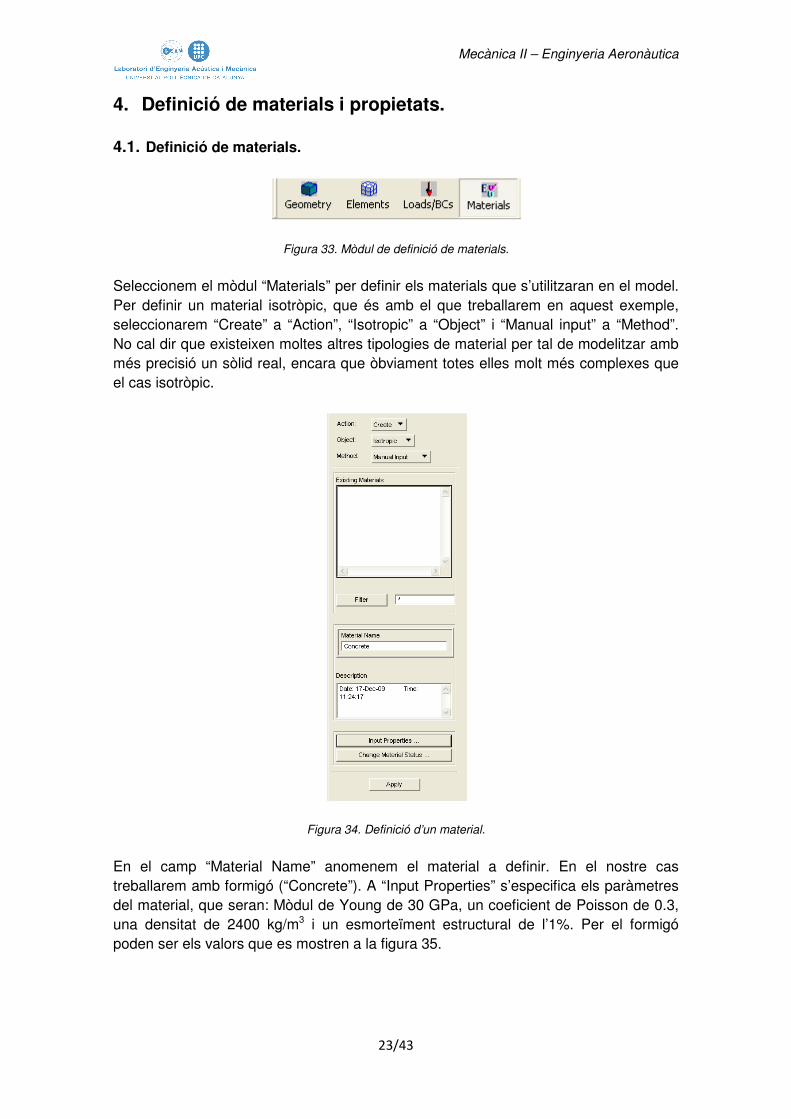
Seleccionem el mòdul “Materials” per definir els materials que s’utilitzaran en el model. Per definir un material isotròpic, que és amb el que treballarem en aquest exemple, seleccionarem “Create” a “Action”, “Isotropic” a “Object” i “Manual input” a “Method”. No cal dir que existeixen moltes altres tipologies de material per tal de modelitzar amb més precisió un sòlid real, encara que òbviament totes elles molt més complexes que el cas isotròpic.
Figura 34. Definició d’un material.
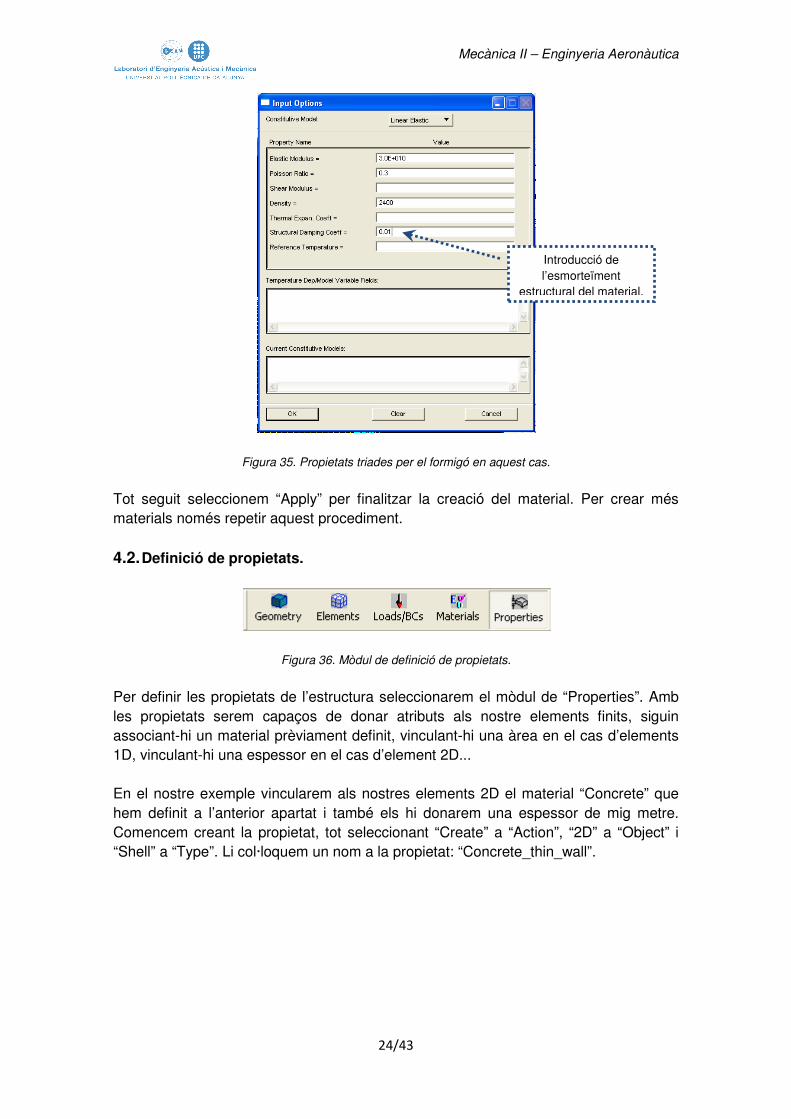
En el camp “Material Name” anomenem el material a definir. En el nostre cas treballarem amb formigó (“Concrete”). A “Input Properties” s’especifica els paràmetres del material, que seran: Mòdul de Young de 30 GPa, un coeficient de Poisson de 0.3, una densitat de 2400 kg/m3 i un esmorteïment estructural de l’1%. Per el formigó poden ser els valors que es mostren a la figura 35.
Mecànica II – Enginyeria Aeronàutica
24/43
Figura 35. Propietats triades per el formigó en aquest cas.
Tot seguit seleccionem “Apply” per finalitzar la creació del material. Per crear més materials només repetir aquest procediment. 4.2. Definició de propietats.
Figura 36. Mòdul de definició de propietats.
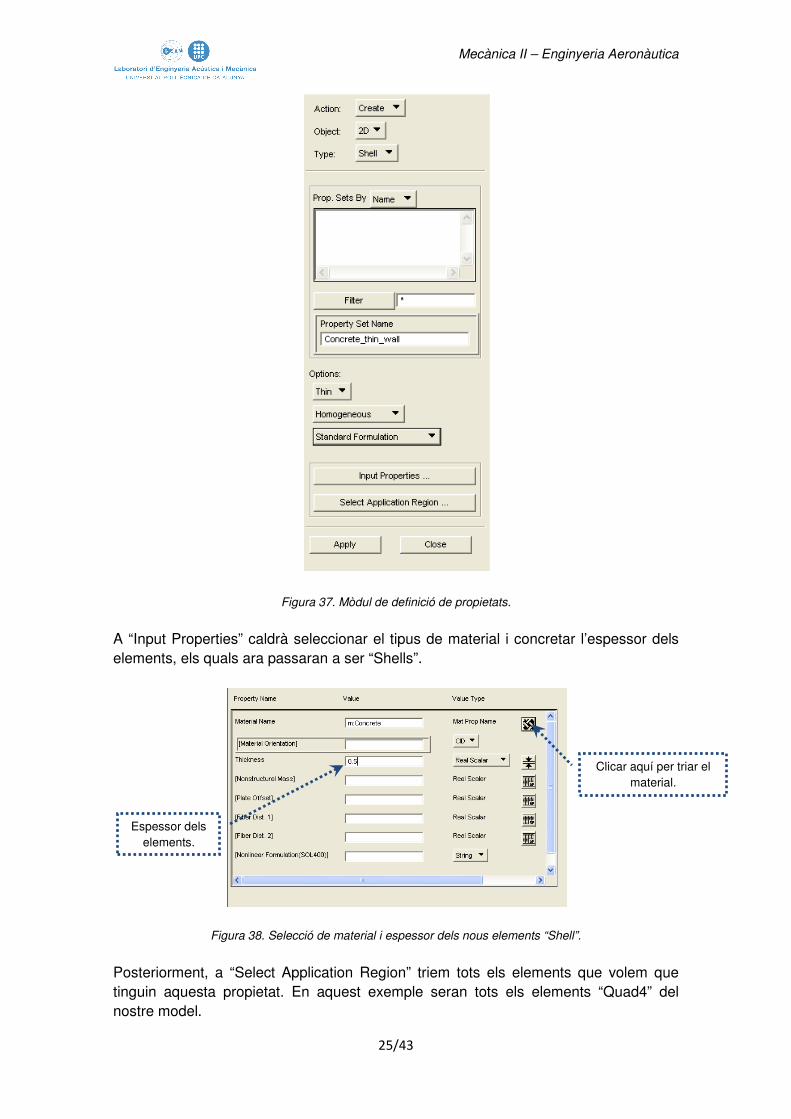
Per definir les propietats de l’estructura seleccionarem el mòdul de “Properties”. Amb les propietats serem capaços de donar atributs als nostre elements finits, siguin associant-hi un material prèviament definit, vinculant-hi una àrea en el cas d’elements 1D, vinculant-hi una espessor en el cas d’element 2D... En el nostre exemple vincularem als nostres elements 2D el material “Concrete” que hem definit a l’anterior apartat i també els hi donarem una espessor de mig metre. Comencem creant la propietat, tot seleccionant “Create” a “Action”, “2D” a “Object” i “Shell” a “Type”. Li col·loquem un nom a la propietat: “Concrete_thin_wall”.
Introducció de l’esmorteïment
estructural del material.
Mecànica II – Enginyeria Aeronàutica
25/43
Figura 37. Mòdul de definició de propietats.
A “Input Properties” caldrà seleccionar el tipus de material i concretar l’espessor dels elements, els quals ara passaran a ser “Shells”.
Figura 38. Selecció de material i espessor dels nous elements “Shell”.
Posteriorment, a “Select Application Region” triem tots els elements que volem que tinguin aquesta propietat. En aquest exemple seran tots els elements “Quad4” del nostre model.
Clicar aquí per triar el material.
Espessor dels elements.
Mecànica II – Enginyeria Aeronàutica
26/43
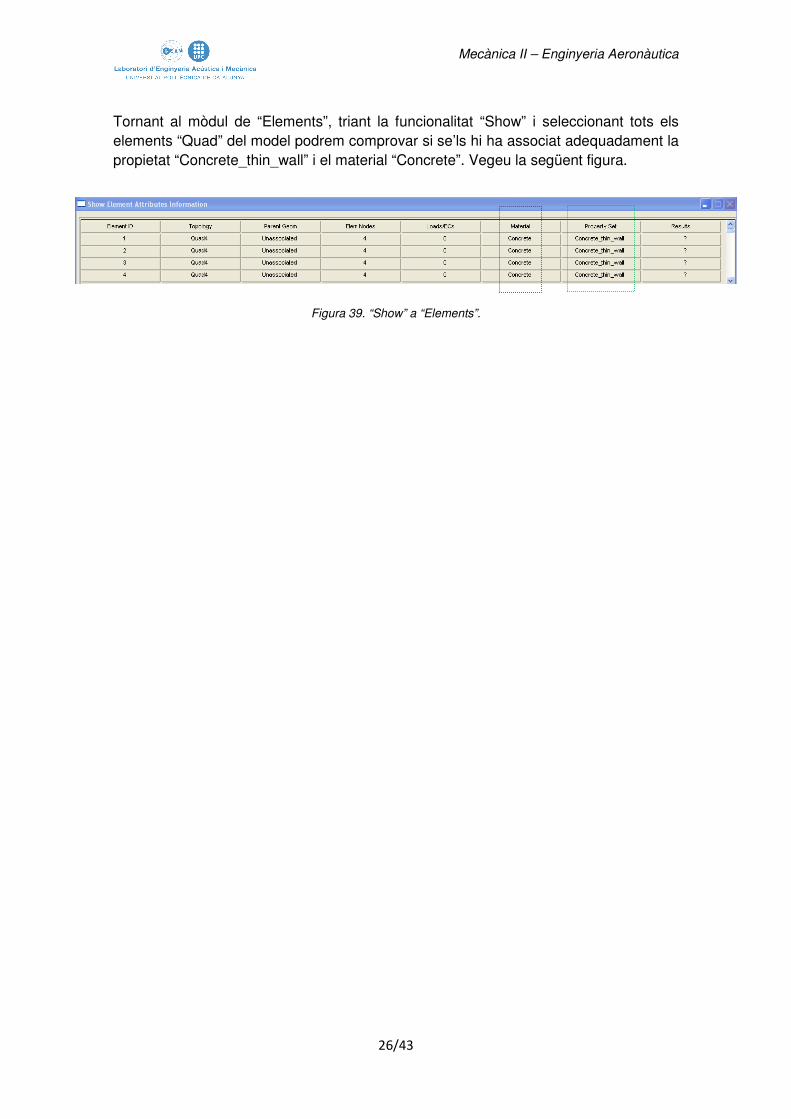
Tornant al mòdul de “Elements”, triant la funcionalitat “Show” i seleccionant tots els elements “Quad” del model podrem comprovar si se’ls hi ha associat adequadament la propietat “Concrete_thin_wall” i el material “Concrete”. Vegeu la següent figura.
Figura 39. “Show” a “Elements”.
Mecànica II – Enginyeria Aeronàutica
27/43
5. Definició de casos de càlcul (Load cases).
Figura 40. Mòdul de definició de casos de càlcul.
Habitualment, en models complexes de sistemes reals, es defineixen gran quantitat de càrregues i de condicions de contorn. Els casos de càlcul o “Load cases” ens permetran muntar càlculs amb diferents combinacions de càrregues i condicions de contorn. Això ens permetrà veure els efectes combinats o no combinats de les diferents càrregues i/o condicions de contorn a la resposta del sistema. Cal recordar que de cara a un càlcul de modes propis (Sol. 103) les càrregues no tenen cap sentit i que per tant casos de càlcul amb diferents càrregues (no pas condicions de contorn) donaran la mateixa resposta modal. Aquest fet no succeeix òbviament amb un càlcul de “Frequency Response” on tant les càrregues com les condicions de contorn modifiquen el resultat. Seguidament definirem els casos de càlcul que voldrem tenir definits en aquest exemple. En generarem només un i l’anomenarem “LoadCase1”. Veure figura 41. A “Input Data” caldrà seleccionar les condicions de contorn i les forces que vulguem introduir en el nostre cas de càlcul. Veure figura 42.
Mecànica II – Enginyeria Aeronàutica
28/43
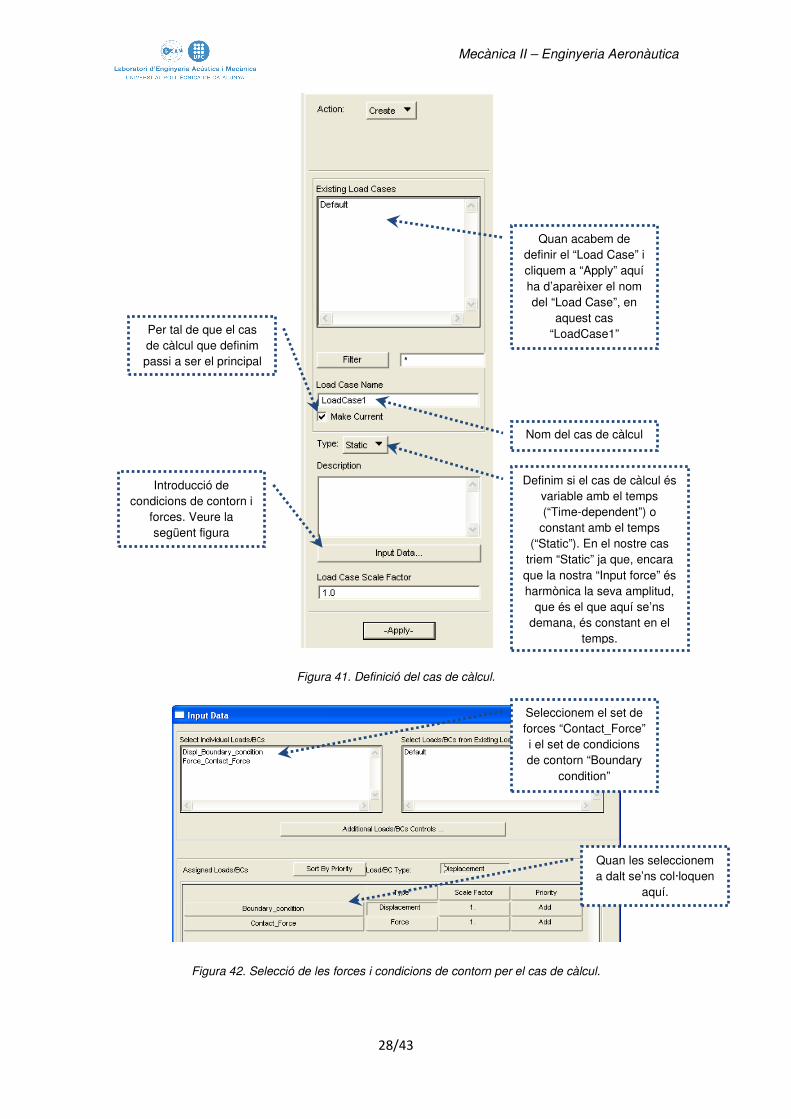
Figura 41. Definició del cas de càlcul.
Figura 42. Selecció de les forces i condicions de contorn per el cas de càlcul.
Nom del cas de càlcul
Per tal de que el cas de càlcul que definim passi a ser el principal
Quan acabem de definir el “Load Case” i cliquem a “Apply” aquí ha d’aparèixer el nom del “Load Case”, en
aquest cas “LoadCase1”
Definim si el cas de càlcul és variable amb el temps (“Time-dependent”) o
constant amb el temps (“Static”). En el nostre cas
triem “Static” ja que, encara que la nostra “Input force” és harmònica la seva amplitud,
que és el que aquí se’ns demana, és constant en el
temps.
Introducció de condicions de contorn i
forces. Veure la següent figura
Seleccionem el set de forces “Contact_Force” i el set de condicions de contorn “Boundary
condition”
Quan les seleccionem a dalt se’ns col·loquen
aquí.
Mecànica II – Enginyeria Aeronàutica
29/43
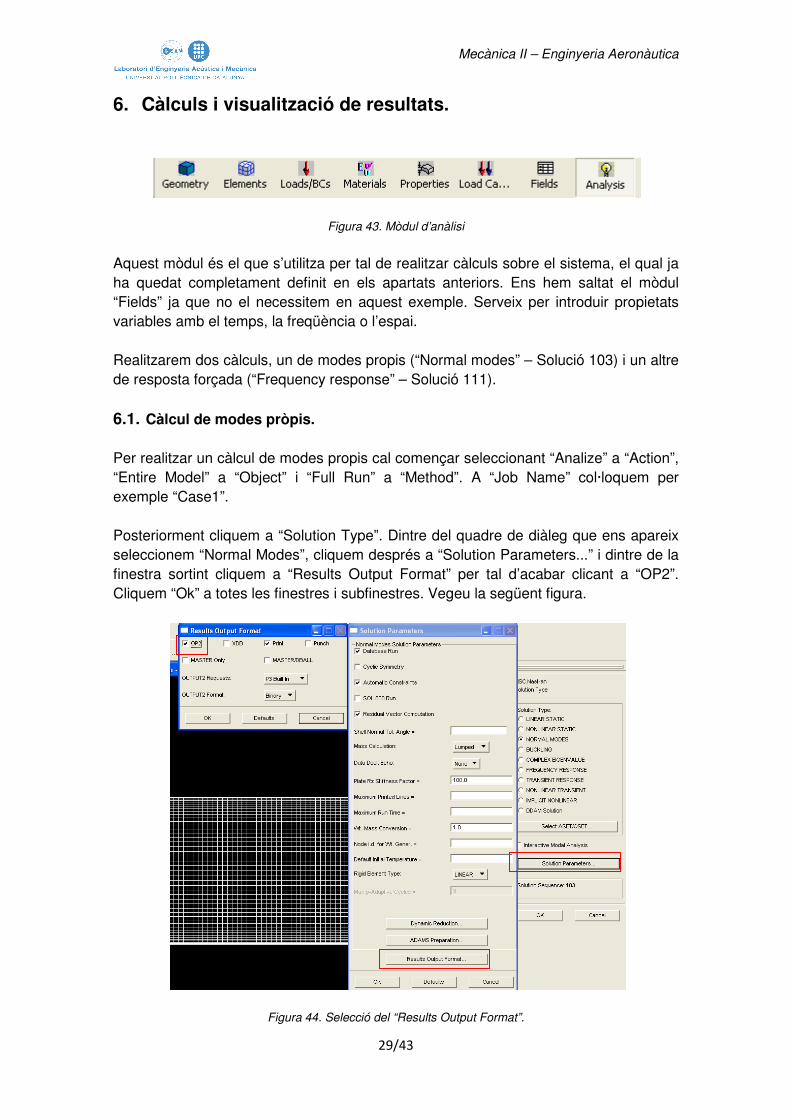
6. Càlculs i visualització de resultats.
Figura 43. Mòdul d’anàlisi
Aquest mòdul és el que s’utilitza per tal de realitzar càlculs sobre el sistema, el qual ja ha quedat completament definit en els apartats anteriors. Ens hem saltat el mòdul “Fields” ja que no el necessitem en aquest exemple. Serveix per introduir propietats variables amb el temps, la freqüència o l’espai. Realitzarem dos càlculs, un de modes propis (“Normal modes” – Solució 103) i un altre de resposta forçada (“Frequency response” – Solució 111). 6.1. Càlcul de modes pròpis.
Per realitzar un càlcul de modes propis cal començar seleccionant “Analize” a “Action”, “Entire Model” a “Object” i “Full Run” a “Method”. A “Job Name” col·loquem per exemple “Case1”. Posteriorment cliquem a “Solution Type”. Dintre del quadre de diàleg que ens apareix seleccionem “Normal Modes”, cliquem després a “Solution Parameters...” i dintre de la finestra sortint cliquem a “Results Output Format” per tal d’acabar clicant a “OP2”. Cliquem “Ok” a totes les finestres i subfinestres. Vegeu la següent figura.
Figura 44. Selecció del “Results Output Format”.
Mecànica II – Enginyeria Aeronàutica
30/43
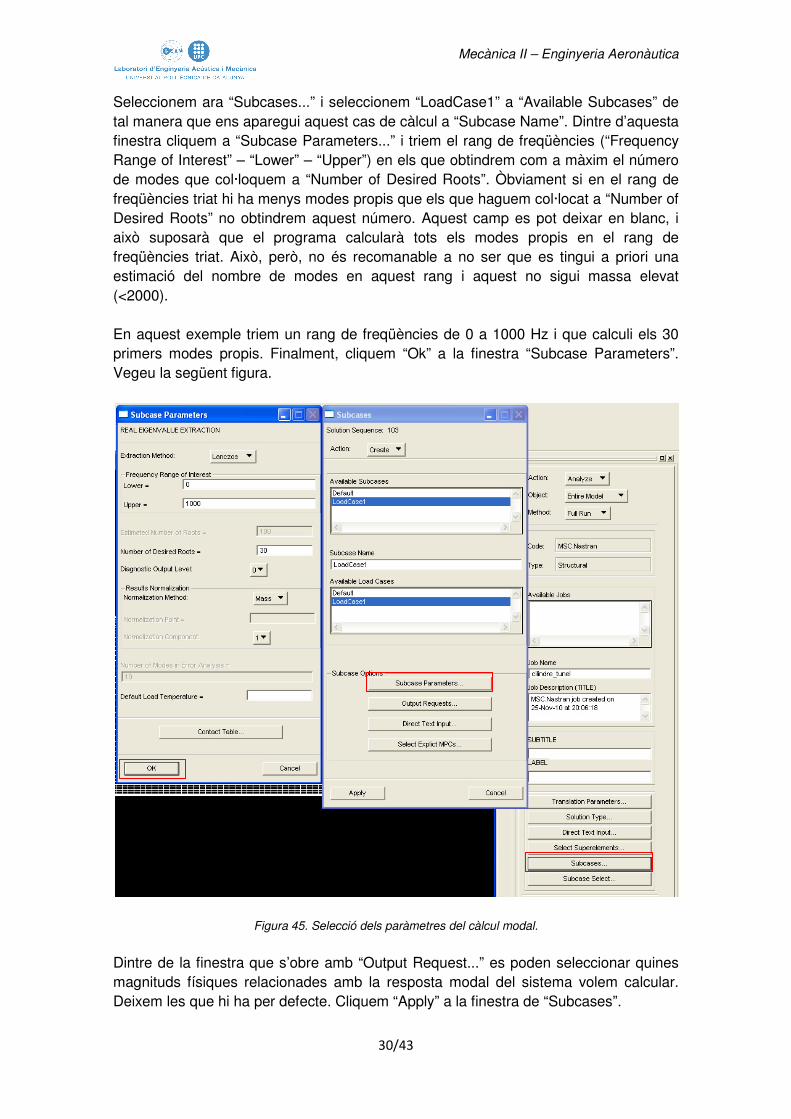
Seleccionem ara “Subcases...” i seleccionem “LoadCase1” a “Available Subcases” de tal manera que ens aparegui aquest cas de càlcul a “Subcase Name”. Dintre d’aquesta finestra cliquem a “Subcase Parameters...” i triem el rang de freqüències (“Frequency Range of Interest” – “Lower” – “Upper”) en els que obtindrem com a màxim el número de modes que col·loquem a “Number of Desired Roots”. Òbviament si en el rang de freqüències triat hi ha menys modes propis que els que haguem col·locat a “Number of Desired Roots” no obtindrem aquest número. Aquest camp es pot deixar en blanc, i això suposarà que el programa calcularà tots els modes propis en el rang de freqüències triat. Això, però, no és recomanable a no ser que es tingui a priori una estimació del nombre de modes en aquest rang i aquest no sigui massa elevat (<2000). En aquest exemple triem un rang de freqüències de 0 a 1000 Hz i que calculi els 30 primers modes propis. Finalment, cliquem “Ok” a la finestra “Subcase Parameters”. Vegeu la següent figura.
Figura 45. Selecció dels paràmetres del càlcul modal.
Dintre de la finestra que s’obre amb “Output Request...” es poden seleccionar quines magnituds físiques relacionades amb la resposta modal del sistema volem calcular. Deixem les que hi ha per defecte. Cliquem “Apply” a la finestra de “Subcases”.
Mecànica II – Enginyeria Aeronàutica
31/43
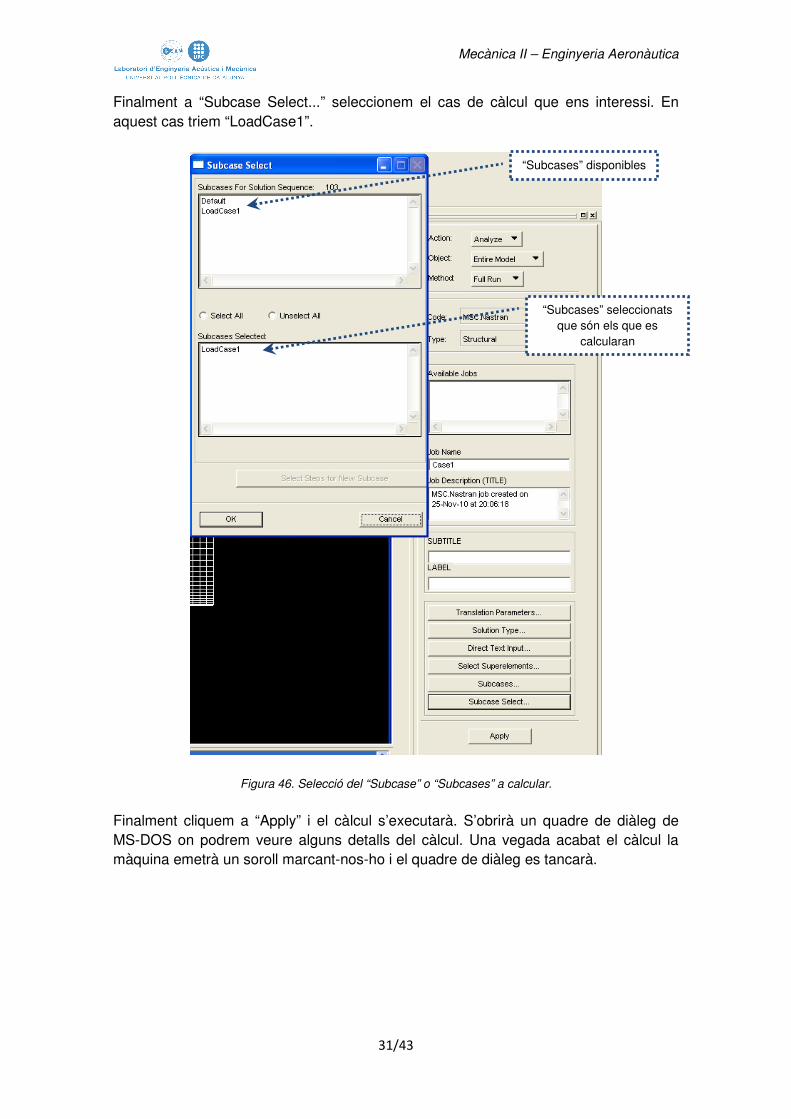
Finalment a “Subcase Select...” seleccionem el cas de càlcul que ens interessi. En aquest cas triem “LoadCase1”.
Figura 46. Selecció del “Subcase” o “Subcases” a calcular.
Finalment cliquem a “Apply” i el càlcul s’executarà. S’obrirà un quadre de diàleg de MS-DOS on podrem veure alguns detalls del càlcul. Una vegada acabat el càlcul la màquina emetrà un soroll marcant-nos-ho i el quadre de diàleg es tancarà.
“Subcases” disponibles
“Subcases” seleccionats que són els que es
calcularan
Mecànica II – Enginyeria Aeronàutica
32/43
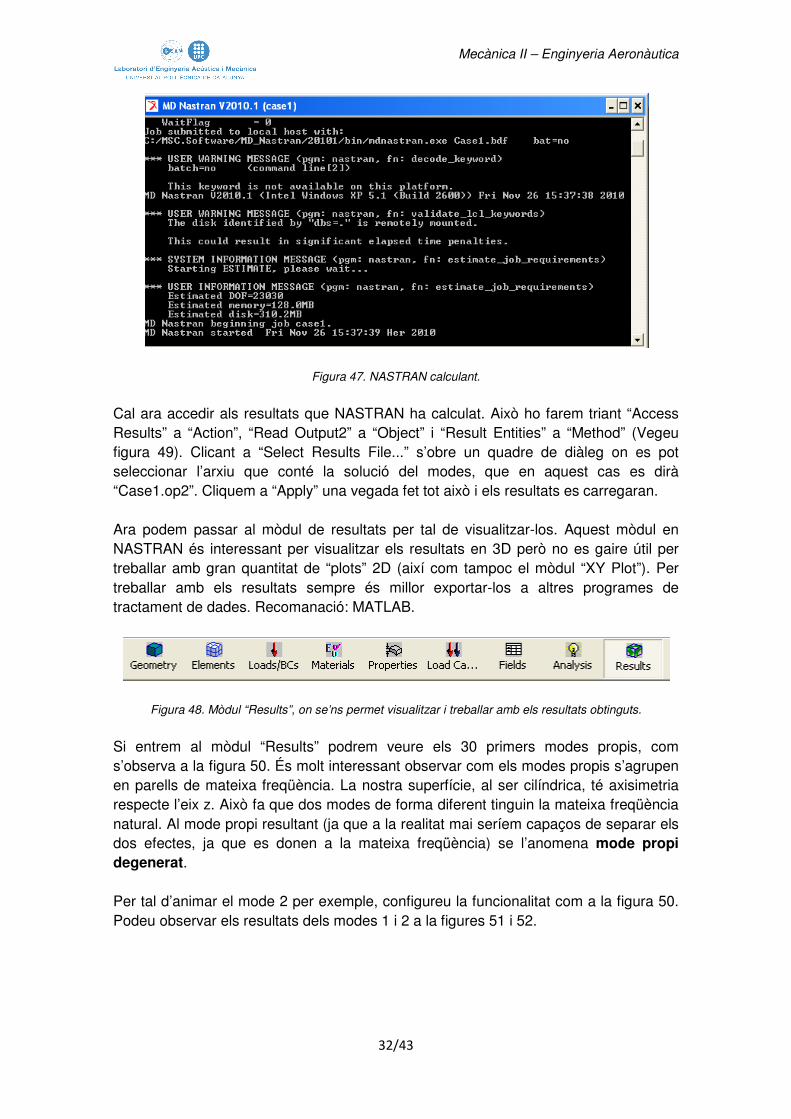
Figura 47. NASTRAN calculant.
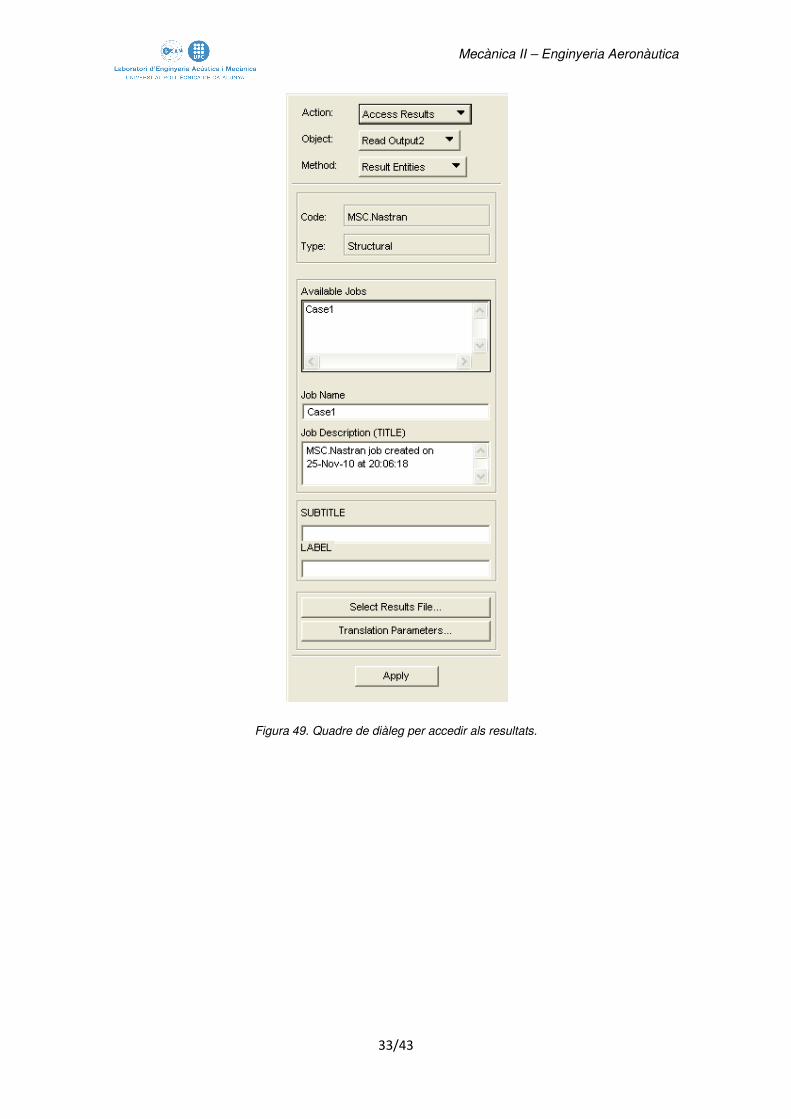
Cal ara accedir als resultats que NASTRAN ha calculat. Això ho farem triant “Access Results” a “Action”, “Read Output2” a “Object” i “Result Entities” a “Method” (Vegeu figura 49). Clicant a “Select Results File...” s’obre un quadre de diàleg on es pot seleccionar l’arxiu que conté la solució del modes, que en aquest cas es dirà “Case1.op2”. Cliquem a “Apply” una vegada fet tot això i els resultats es carregaran. Ara podem passar al mòdul de resultats per tal de visualitzar-los. Aquest mòdul en NASTRAN és interessant per visualitzar els resultats en 3D però no es gaire útil per treballar amb gran quantitat de “plots” 2D (així com tampoc el mòdul “XY Plot”). Per treballar amb els resultats sempre és millor exportar-los a altres programes de tractament de dades. Recomanació: MATLAB.
Figura 48. Mòdul “Results”, on se’ns permet visualitzar i treballar amb els resultats obtinguts.
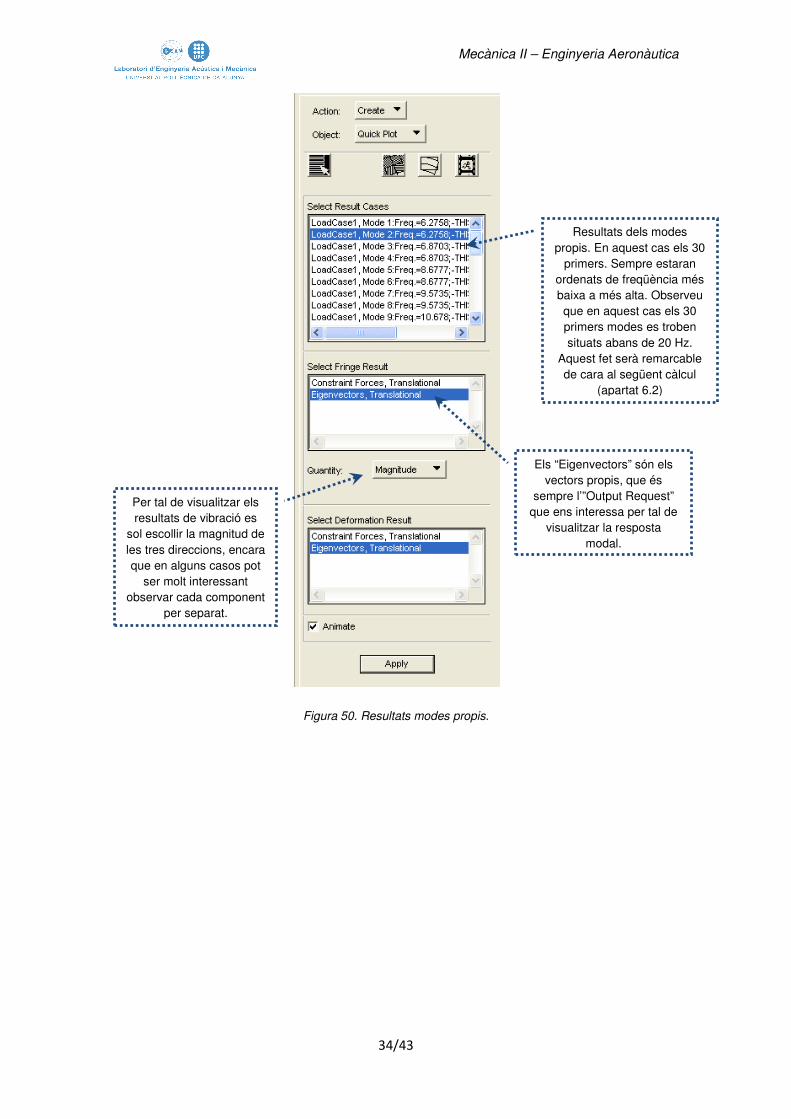
Si entrem al mòdul “Results” podrem veure els 30 primers modes propis, com s’observa a la figura 50. És molt interessant observar com els modes propis s’agrupen en parells de mateixa freqüència. La nostra superfície, al ser cilíndrica, té axisimetria respecte l’eix z. Això fa que dos modes de forma diferent tinguin la mateixa freqüència natural. Al mode propi resultant (ja que a la realitat mai seríem capaços de separar els dos efectes, ja que es donen a la mateixa freqüència) se l’anomena mode propi
degenerat. Per tal d’animar el mode 2 per exemple, configureu la funcionalitat com a la figura 50. Podeu observar els resultats dels modes 1 i 2 a la figures 51 i 52.
Mecànica II – Enginyeria Aeronàutica
33/43
Figura 49. Quadre de diàleg per accedir als resultats.
Mecànica II – Enginyeria Aeronàutica
34/43
Figura 50. Resultats modes propis.
Resultats dels modes propis. En aquest cas els 30
primers. Sempre estaran ordenats de freqüència més baixa a més alta. Observeu que en aquest cas els 30 primers modes es troben situats abans de 20 Hz.
Aquest fet serà remarcable de cara al següent càlcul
(apartat 6.2)
Els “Eigenvectors” són els vectors propis, que és
sempre l’”Output Request” que ens interessa per tal de
visualitzar la resposta modal.
Per tal de visualitzar els resultats de vibració es
sol escollir la magnitud de les tres direccions, encara que en alguns casos pot
ser molt interessant observar cada component
per separat.
Mecànica II – Enginyeria Aeronàutica
35/43
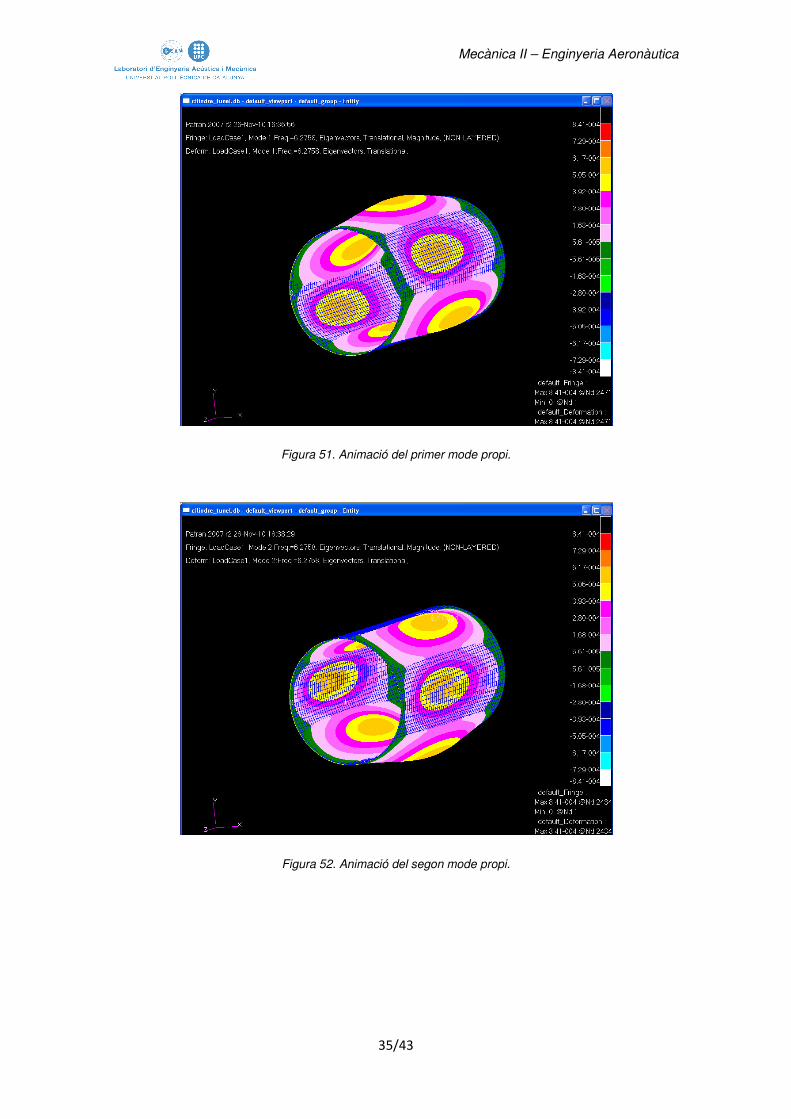
Figura 51. Animació del primer mode propi.
Figura 52. Animació del segon mode propi.
Mecànica II – Enginyeria Aeronàutica
36/43
És interessant observar una solució de modes propis sense condicions de contorn. Torneu al mòdul “Load Cases” i feu un nou “Load Case” que no contingui condicions de contorn. Anomeneu-lo diferent als anteriors. Realitzeu els mateixos passos que s’han descrit en aquest apartat. Quan arribeu al mòdul “Analysis” col·loqueu un altre “Job Name”, per exemple “Case2”. A “Results” observareu que apareixen 6 modes propis amb freqüències aproximadament zero: Són els anomenats modes propis de
sòlid rígid. Quan els animeu observareu que el sistema no es deforma sinó que només es trasllada i/o rota. Això es dóna per que al no haver restringit el sistema aquest pot desplaçar-se lliurament per l’espai i per tant, si s’entén la definició de mode propi com un possible moviment d’un cos, una translació i/o rotació és una oscil·lació a freqüència nul·la. També és molt important incidir en que els valors d’amplitud que apareixen a la resposta modal no tenen cap significat físic. En el fons, les figures 51 i 52 són representacions gràfiques dels vectors propis dels dos primers modes. Cal recordar que un vector propi té un escalat arbitrari, que sorgeix del mètode d’extracció dels “eigenvalues” i de les “eigenmatrices” (“Eigenvalues and Eigenmatrices extraction method”), i que per tant només es pot entendre com una relació entre les amplituds dels diferents graus de llibertat: els valors individuals no tenen cap sentit físic. Així el mòdul del vector propi és una variable sense significació, tal i com s’exemplifica a la següent equivalència entre dos possibles vectors propis.
�����1425�28 ���� �
�����1004002500�200800 �
���
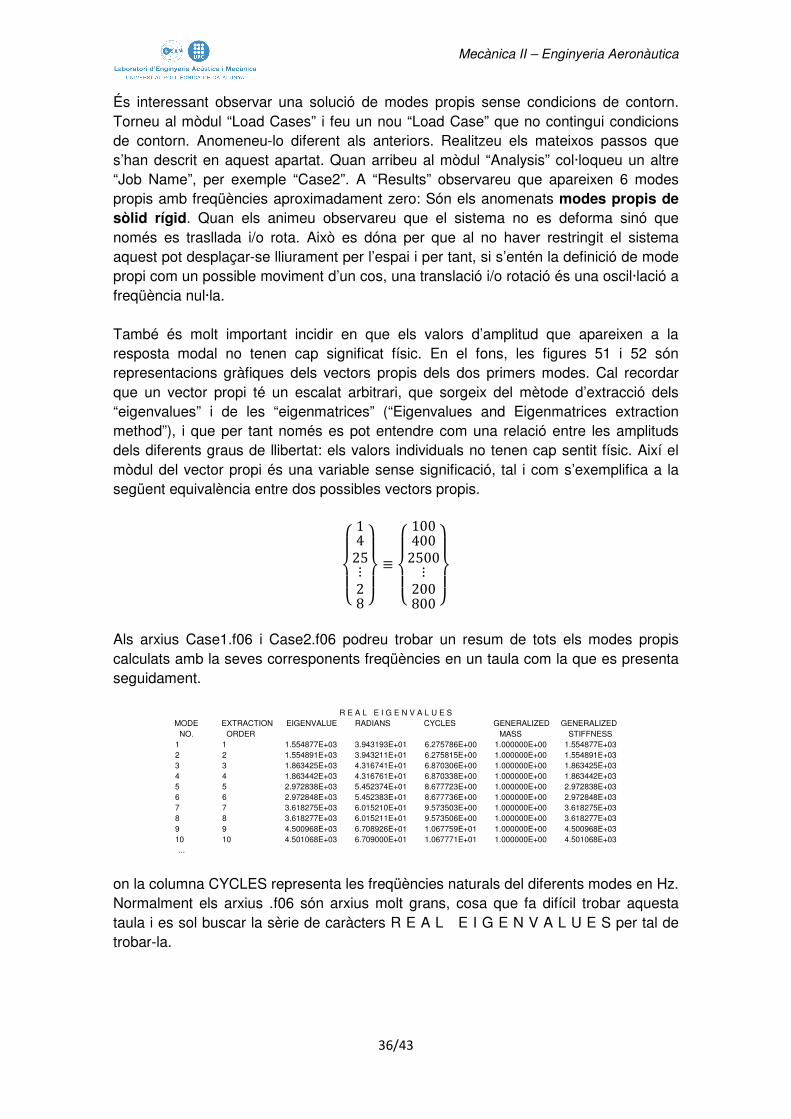
Als arxius Case1.f06 i Case2.f06 podreu trobar un resum de tots els modes propis calculats amb la seves corresponents freqüències en un taula com la que es presenta seguidament.
R E A L E I G E N V A L U E S MODE EXTRACTION EIGENVALUE RADIANS CYCLES GENERALIZED GENERALIZED
NO. ORDER MASS STIFFNESS 1 1 1.554877E+03 3.943193E+01 6.275786E+00 1.000000E+00 1.554877E+03 2 2 1.554891E+03 3.943211E+01 6.275815E+00 1.000000E+00 1.554891E+03 3 3 1.863425E+03 4.316741E+01 6.870306E+00 1.000000E+00 1.863425E+03 4 4 1.863442E+03 4.316761E+01 6.870338E+00 1.000000E+00 1.863442E+03 5 5 2.972838E+03 5.452374E+01 8.677723E+00 1.000000E+00 2.972838E+03 6 6 2.972848E+03 5.452383E+01 8.677736E+00 1.000000E+00 2.972848E+03 7 7 3.618275E+03 6.015210E+01 9.573503E+00 1.000000E+00 3.618275E+03 8 8 3.618277E+03 6.015211E+01 9.573506E+00 1.000000E+00 3.618277E+03 9 9 4.500968E+03 6.708926E+01 1.067759E+01 1.000000E+00 4.500968E+03 10 10 4.501068E+03 6.709000E+01 1.067771E+01 1.000000E+00 4.501068E+03
...
on la columna CYCLES representa les freqüències naturals del diferents modes en Hz. Normalment els arxius .f06 són arxius molt grans, cosa que fa difícil trobar aquesta taula i es sol buscar la sèrie de caràcters R E A L E I G E N V A L U E S per tal de trobar-la.
Mecànica II – Enginyeria Aeronàutica
37/43
6.2. Càlcul de resposta forçada.
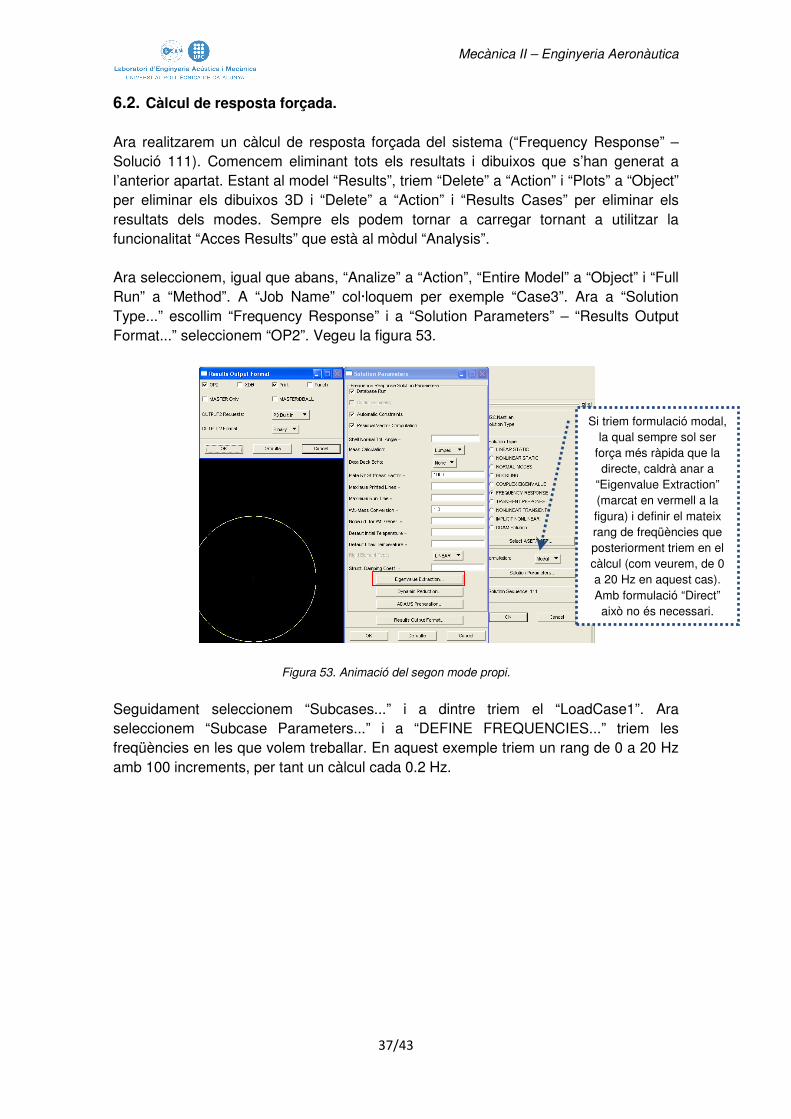
Ara realitzarem un càlcul de resposta forçada del sistema (“Frequency Response” – Solució 111). Comencem eliminant tots els resultats i dibuixos que s’han generat a l’anterior apartat. Estant al model “Results”, triem “Delete” a “Action” i “Plots” a “Object” per eliminar els dibuixos 3D i “Delete” a “Action” i “Results Cases” per eliminar els resultats dels modes. Sempre els podem tornar a carregar tornant a utilitzar la funcionalitat “Acces Results” que està al mòdul “Analysis”. Ara seleccionem, igual que abans, “Analize” a “Action”, “Entire Model” a “Object” i “Full Run” a “Method”. A “Job Name” col·loquem per exemple “Case3”. Ara a “Solution Type...” escollim “Frequency Response” i a “Solution Parameters” – “Results Output Format...” seleccionem “OP2”. Vegeu la figura 53.
Figura 53. Animació del segon mode propi.
Seguidament seleccionem “Subcases...” i a dintre triem el “LoadCase1”. Ara seleccionem “Subcase Parameters...” i a “DEFINE FREQUENCIES...” triem les freqüències en les que volem treballar. En aquest exemple triem un rang de 0 a 20 Hz amb 100 increments, per tant un càlcul cada 0.2 Hz.
Si triem formulació modal, la qual sempre sol ser
força més ràpida que la directe, caldrà anar a
“Eigenvalue Extraction” (marcat en vermell a la figura) i definir el mateix rang de freqüències que posteriorment triem en el càlcul (com veurem, de 0 a 20 Hz en aquest cas). Amb formulació “Direct”
això no és necessari.
Mecànica II – Enginyeria Aeronàutica
38/43
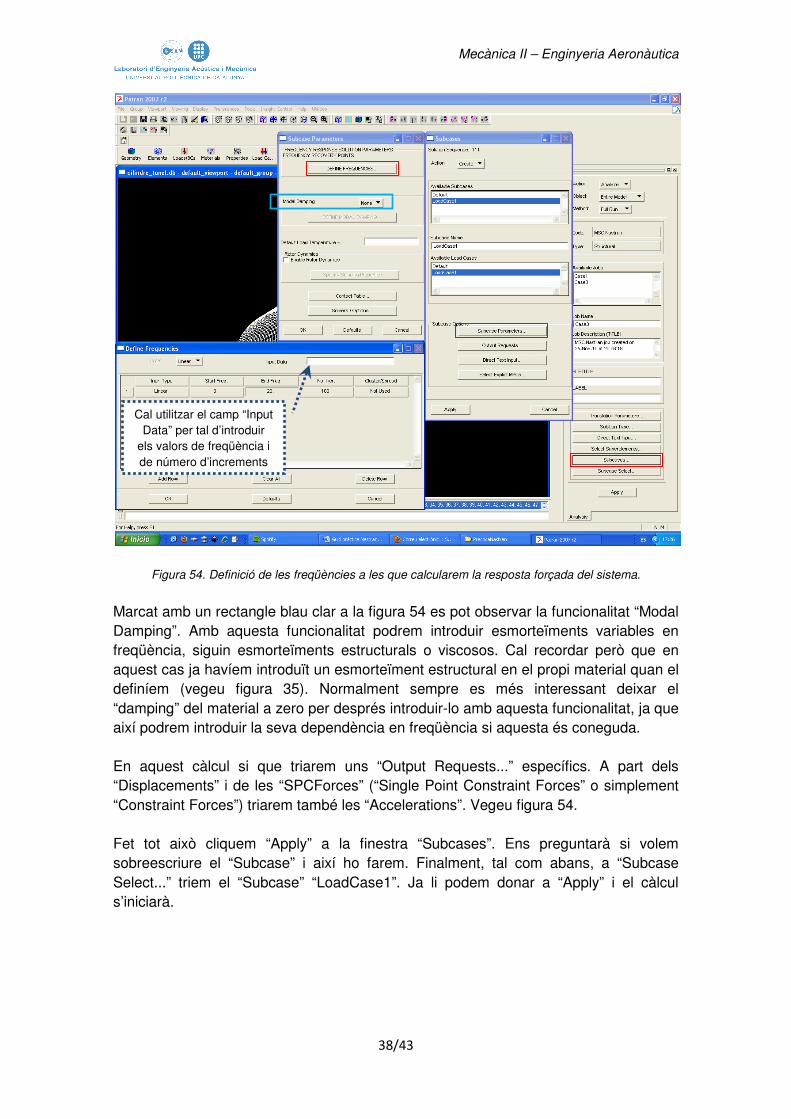
Figura 54. Definició de les freqüències a les que calcularem la resposta forçada del sistema.
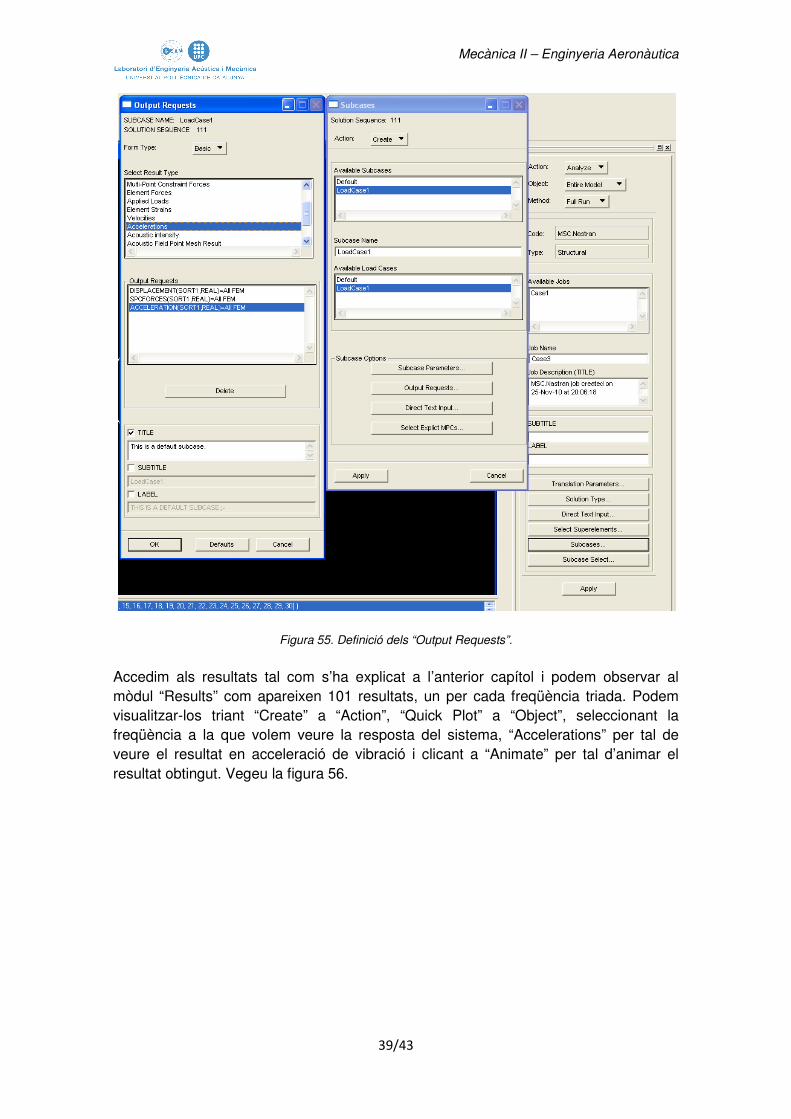
Marcat amb un rectangle blau clar a la figura 54 es pot observar la funcionalitat “Modal Damping”. Amb aquesta funcionalitat podrem introduir esmorteïments variables en freqüència, siguin esmorteïments estructurals o viscosos. Cal recordar però que en aquest cas ja havíem introduït un esmorteïment estructural en el propi material quan el definíem (vegeu figura 35). Normalment sempre es més interessant deixar el “damping” del material a zero per després introduir-lo amb aquesta funcionalitat, ja que així podrem introduir la seva dependència en freqüència si aquesta és coneguda. En aquest càlcul si que triarem uns “Output Requests...” específics. A part dels “Displacements” i de les “SPCForces” (“Single Point Constraint Forces” o simplement “Constraint Forces”) triarem també les “Accelerations”. Vegeu figura 54. Fet tot això cliquem “Apply” a la finestra “Subcases”. Ens preguntarà si volem sobreescriure el “Subcase” i així ho farem. Finalment, tal com abans, a “Subcase Select...” triem el “Subcase” “LoadCase1”. Ja li podem donar a “Apply” i el càlcul s’iniciarà.
Cal utilitzar el camp “Input Data” per tal d’introduir
els valors de freqüència i de número d’increments
Mecànica II – Enginyeria Aeronàutica
39/43
Figura 55. Definició dels “Output Requests”.
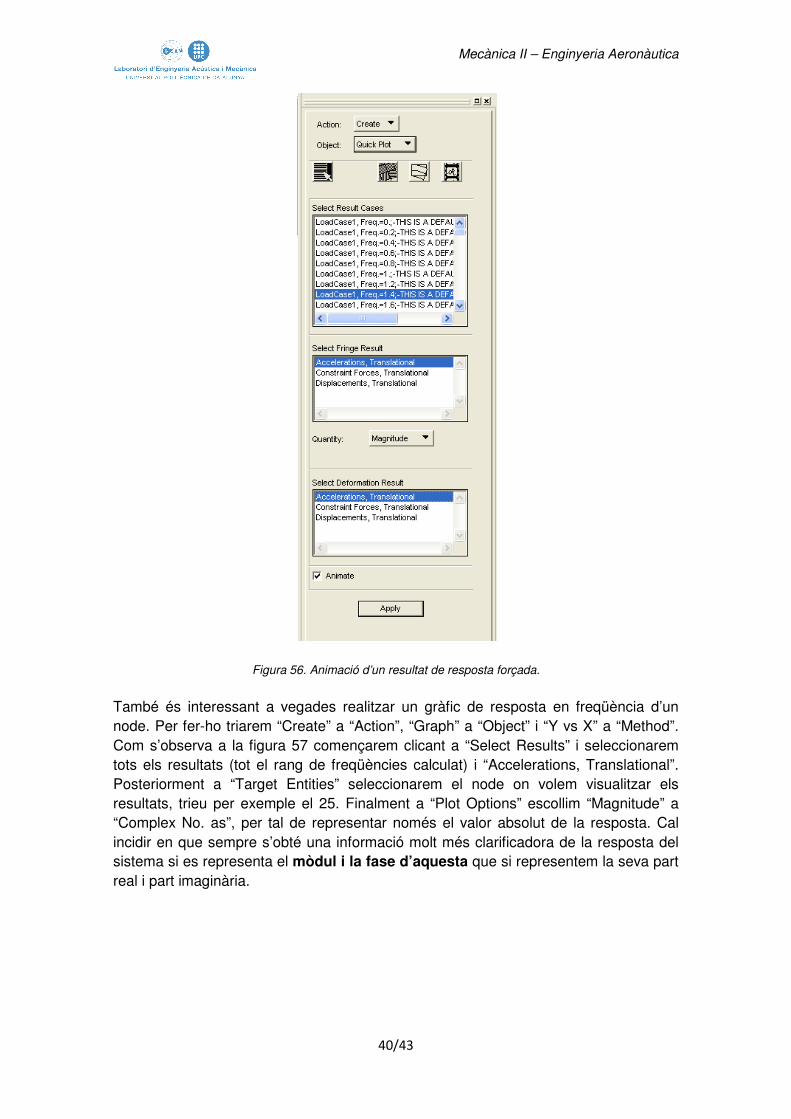
Accedim als resultats tal com s’ha explicat a l’anterior capítol i podem observar al mòdul “Results” com apareixen 101 resultats, un per cada freqüència triada. Podem visualitzar-los triant “Create” a “Action”, “Quick Plot” a “Object”, seleccionant la freqüència a la que volem veure la resposta del sistema, “Accelerations” per tal de veure el resultat en acceleració de vibració i clicant a “Animate” per tal d’animar el resultat obtingut. Vegeu la figura 56.
Mecànica II – Enginyeria Aeronàutica
40/43
Figura 56. Animació d’un resultat de resposta forçada.
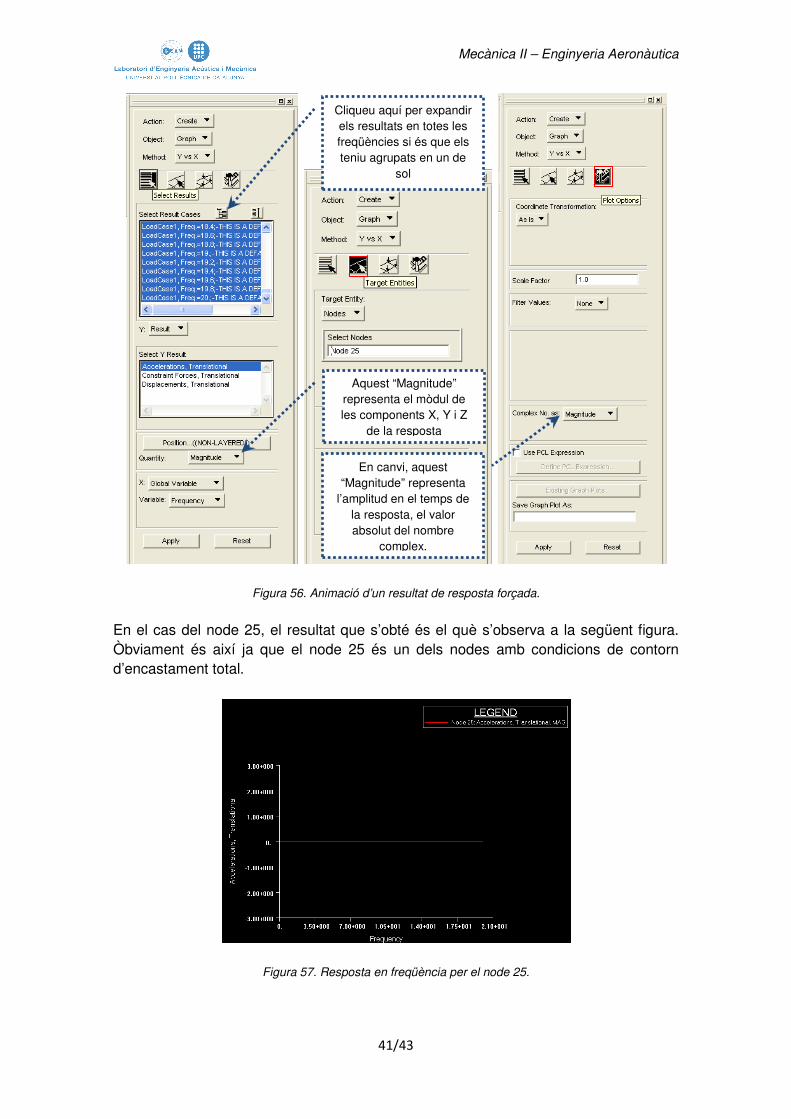
També és interessant a vegades realitzar un gràfic de resposta en freqüència d’un node. Per fer-ho triarem “Create” a “Action”, “Graph” a “Object” i “Y vs X” a “Method”. Com s’observa a la figura 57 començarem clicant a “Select Results” i seleccionarem tots els resultats (tot el rang de freqüències calculat) i “Accelerations, Translational”. Posteriorment a “Target Entities” seleccionarem el node on volem visualitzar els resultats, trieu per exemple el 25. Finalment a “Plot Options” escollim “Magnitude” a “Complex No. as”, per tal de representar només el valor absolut de la resposta. Cal incidir en que sempre s’obté una informació molt més clarificadora de la resposta del sistema si es representa el mòdul i la fase d’aquesta que si representem la seva part real i part imaginària.
Mecànica II – Enginyeria Aeronàutica
41/43
Figura 56. Animació d’un resultat de resposta forçada.
En el cas del node 25, el resultat que s’obté és el què s’observa a la següent figura. Òbviament és així ja que el node 25 és un dels nodes amb condicions de contorn d’encastament total.
Figura 57. Resposta en freqüència per el node 25.
Aquest “Magnitude” representa el mòdul de les components X, Y i Z
de la resposta
En canvi, aquest “Magnitude” representa
l’amplitud en el temps de la resposta, el valor absolut del nombre
complex.
Cliqueu aquí per expandir els resultats en totes les freqüències si és que els teniu agrupats en un de
sol
Mecànica II – Enginyeria Aeronàutica
42/43
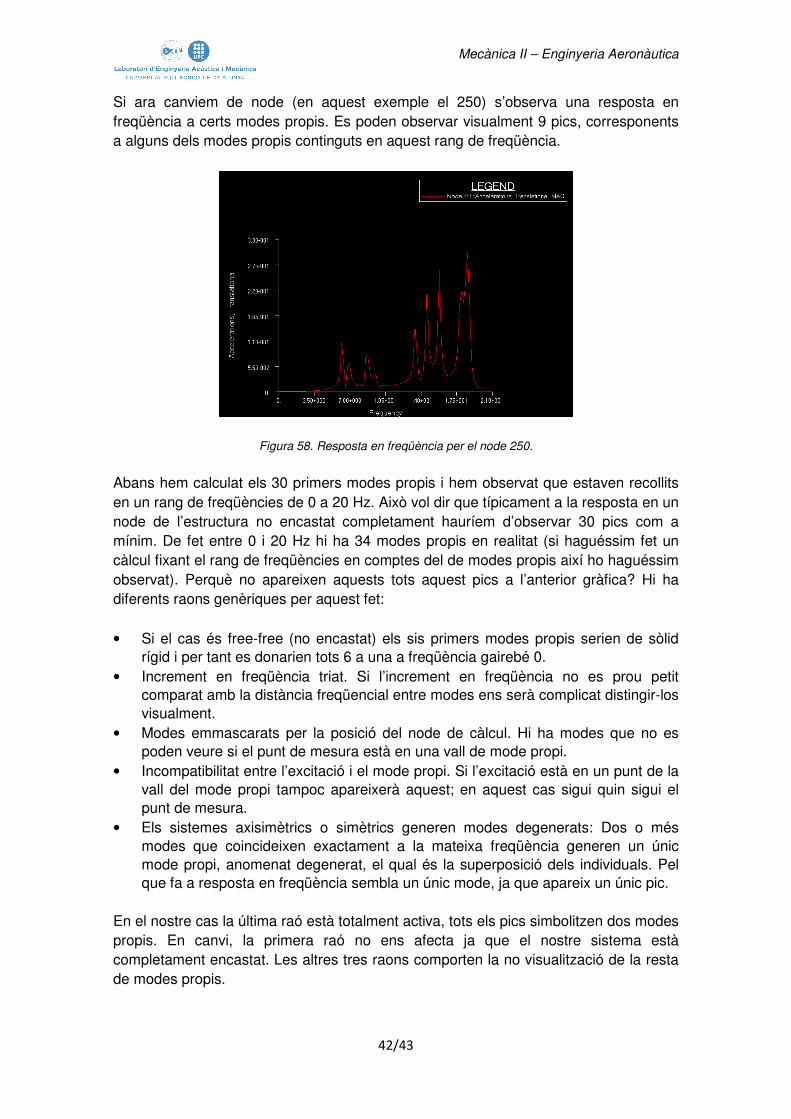
Si ara canviem de node (en aquest exemple el 250) s’observa una resposta en freqüència a certs modes propis. Es poden observar visualment 9 pics, corresponents a alguns dels modes propis continguts en aquest rang de freqüència.
Figura 58. Resposta en freqüència per el node 250.
Abans hem calculat els 30 primers modes propis i hem observat que estaven recollits en un rang de freqüències de 0 a 20 Hz. Això vol dir que típicament a la resposta en un node de l’estructura no encastat completament hauríem d’observar 30 pics com a mínim. De fet entre 0 i 20 Hz hi ha 34 modes propis en realitat (si haguéssim fet un càlcul fixant el rang de freqüències en comptes del de modes propis així ho haguéssim observat). Perquè no apareixen aquests tots aquest pics a l’anterior gràfica? Hi ha diferents raons genèriques per aquest fet: • Si el cas és free-free (no encastat) els sis primers modes propis serien de sòlid
rígid i per tant es donarien tots 6 a una a freqüència gairebé 0. • Increment en freqüència triat. Si l’increment en freqüència no es prou petit
comparat amb la distància freqüencial entre modes ens serà complicat distingir-los visualment.
• Modes emmascarats per la posició del node de càlcul. Hi ha modes que no es poden veure si el punt de mesura està en una vall de mode propi.
• Incompatibilitat entre l’excitació i el mode propi. Si l’excitació està en un punt de la vall del mode propi tampoc apareixerà aquest; en aquest cas sigui quin sigui el punt de mesura.
• Els sistemes axisimètrics o simètrics generen modes degenerats: Dos o més modes que coincideixen exactament a la mateixa freqüència generen un únic mode propi, anomenat degenerat, el qual és la superposició dels individuals. Pel que fa a resposta en freqüència sembla un únic mode, ja que apareix un únic pic.
En el nostre cas la última raó està totalment activa, tots els pics simbolitzen dos modes propis. En canvi, la primera raó no ens afecta ja que el nostre sistema està completament encastat. Les altres tres raons comporten la no visualització de la resta de modes propis.
Mecànica II – Enginyeria Aeronàutica
43/43
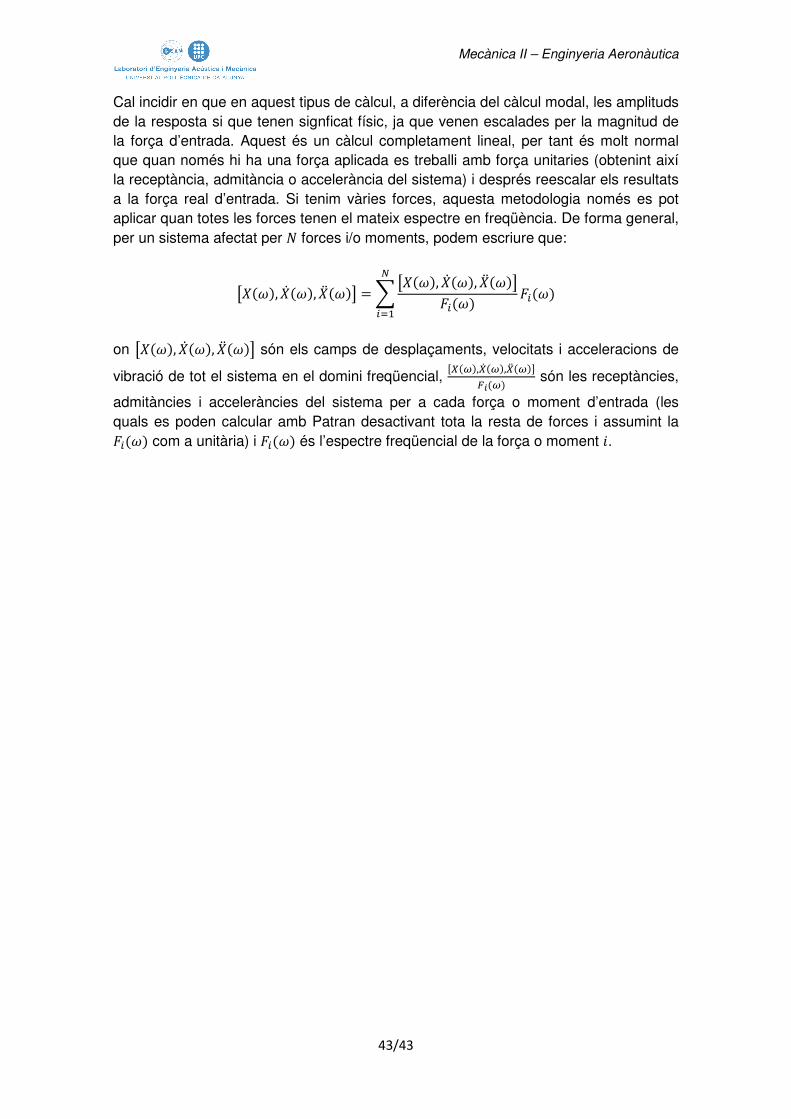
Cal incidir en que en aquest tipus de càlcul, a diferència del càlcul modal, les amplituds de la resposta si que tenen signficat físic, ja que venen escalades per la magnitud de la força d’entrada. Aquest és un càlcul completament lineal, per tant és molt normal que quan només hi ha una força aplicada es treballi amb força unitaries (obtenint així la receptància, admitància o accelerància del sistema) i després reescalar els resultats a la força real d’entrada. Si tenim vàries forces, aquesta metodologia només es pot aplicar quan totes les forces tenen el mateix espectre en freqüència. De forma general, per un sistema afectat per � forces i/o moments, podem escriure que:
�����, �� ���, �� ���� �������, �� ���, �� ��������� ������
� !
on �����, �� ���, �� ���� són els camps de desplaçaments, velocitats i acceleracions de
vibració de tot el sistema en el domini freqüencial, "#�$�,#� �$�,#� �$�%
&'�$� són les receptàncies,
admitàncies i acceleràncies del sistema per a cada força o moment d’entrada (les quals es poden calcular amb Patran desactivant tota la resta de forces i assumint la ����� com a unitària) i ����� és l’espectre freqüencial de la força o moment (.