group 1 casey byers nick johnson felix liu matt long
TRANSCRIPT

Group 1Group 1Casey ByersCasey Byers
Nick Johnson Nick Johnson Felix LiuFelix Liu
Matt LongMatt Long

Presentation OutlinePresentation Outline
I.I. IntroductionIntroductionII.II. Robot Construction and Programming LogicRobot Construction and Programming Logic
a.a. WheelchairWheelchairb.b. CarCarc.c. DefenderDefender
III.III. Performance Results and DiscussionPerformance Results and Discussiona.a. WheelchairWheelchairb.b. CarCarc.c. DefenderDefender
IV.IV. ConclusionConclusion
I. IntroductionI. Introduction

Project ObjectiveProject Objective
Product RequestedProduct Requested A robotA robot
Product FunctionsProduct Functions WheelchairWheelchair
Must pass obstacle course safelyMust pass obstacle course safely CarCar
Must be able to yield to the wheelchairMust be able to yield to the wheelchair DefenderDefender
Must disable other robots in a fixed areaMust disable other robots in a fixed area

Obstacle CourseObstacle Course
Design SpecificationsDesign Specifications
Dimensions cannot exceed 12 inchesDimensions cannot exceed 12 inches
No limit on weightNo limit on weight
No sending of signals to other robotsNo sending of signals to other robots (except for the defender function)(except for the defender function)
Also, each function must be tested Also, each function must be tested against other firms’ robots on the against other firms’ robots on the obstacle course obstacle course

Materials Available for UseMaterials Available for Use
LEGO BlocksLEGO Blocks
LEGO WheelsLEGO Wheels
LEGO RCXLEGO RCX A Programmable “Brain” for A Programmable “Brain” for
the robotthe robot
LEGO Light SensorsLEGO Light Sensors
LEGO Touch SensorsLEGO Touch Sensors
LEGO CablesLEGO Cables
LEGO Master ControllerLEGO Master Controller An Infrared Communication An Infrared Communication
RemoteRemote LEGO RCX and Auxiliaries

II. Robot ConstructionII. Robot Construction
and Programming Logicand Programming Logic
Wheelchair Physical DesignWheelchair Physical Design
Frame Frame Frame just to handle RCX with wheelsFrame just to handle RCX with wheels
Hard to replace batteriesHard to replace batteries New frame to allow quick access to RCXNew frame to allow quick access to RCX
Torque and PowerTorque and Power Gears added to climb stairs, get through sandGears added to climb stairs, get through sand Four-wheel DriveFour-wheel Drive
SensorsSensorsNeeded a way to turn left and rightNeeded a way to turn left and right
Both touch sensors placed on frontBoth touch sensors placed on front Light sensor in front, pointing downLight sensor in front, pointing down

Wheelchair DesignWheelchair Design

Wheelchair DesignWheelchair Design

Wheelchair Programming DesignWheelchair Programming Design
Clockwise/Counterclockwise RotationClockwise/Counterclockwise Rotation Port & Stbd. motors oppositely programmedPort & Stbd. motors oppositely programmed *Applicable to all functions**Applicable to all functions*
TurningTurning Touch SensorsTouch Sensors
Initial: Hit Initial: Hit Jump Back Jump Back Turn Turn Go Go Final: Hit Final: Hit Plow Plow Jump Back Jump Back Turn Turn Go Go
CrosswalkCrosswalk Sense with light senorSense with light senor Sense Sense Jump Back Jump Back Wait for IR Message Wait for IR Message Go Go Note: counter needed for “dark” stairsNote: counter needed for “dark” stairs

Wheelchair ProgramWheelchair Program
Car Physical DesignCar Physical Design
Frame Frame Same as WheelchairSame as Wheelchair
SensorsSensorsNeeded a way to sense wall at front and backNeeded a way to sense wall at front and back
Touch sensors placed on each endTouch sensors placed on each endBoth placed on #3 sensor inputBoth placed on #3 sensor input
No light sensor neededNo light sensor needed

Car DesignCar Design

Car Programming DesignCar Programming Design
Objective AObjective A Go back and forth over crosswalkGo back and forth over crosswalk SolutionSolution
Pressed touch sensors = reverse directionPressed touch sensors = reverse direction
Objective BObjective B Stop after IR message (not on crosswalk)Stop after IR message (not on crosswalk) SolutionSolution
After IR, wait until wall, then stopAfter IR, wait until wall, then stop

Car ProgramCar Program

Defender Physical DesignDefender Physical Design
Method of DefenseMethod of Defense Lift other cars up and incapacitateLift other cars up and incapacitate Stay fixedStay fixed
Frame Frame No wheels needed; level base createdNo wheels needed; level base created Use gears to lift armUse gears to lift arm Add additional mass for leverageAdd additional mass for leverage
SensorsSensorsNeeded a way to sense other carsNeeded a way to sense other cars
Both touch sensors placed on frontBoth touch sensors placed on front No light sensor neededNo light sensor needed
Fixed; no zone violations possibleFixed; no zone violations possible
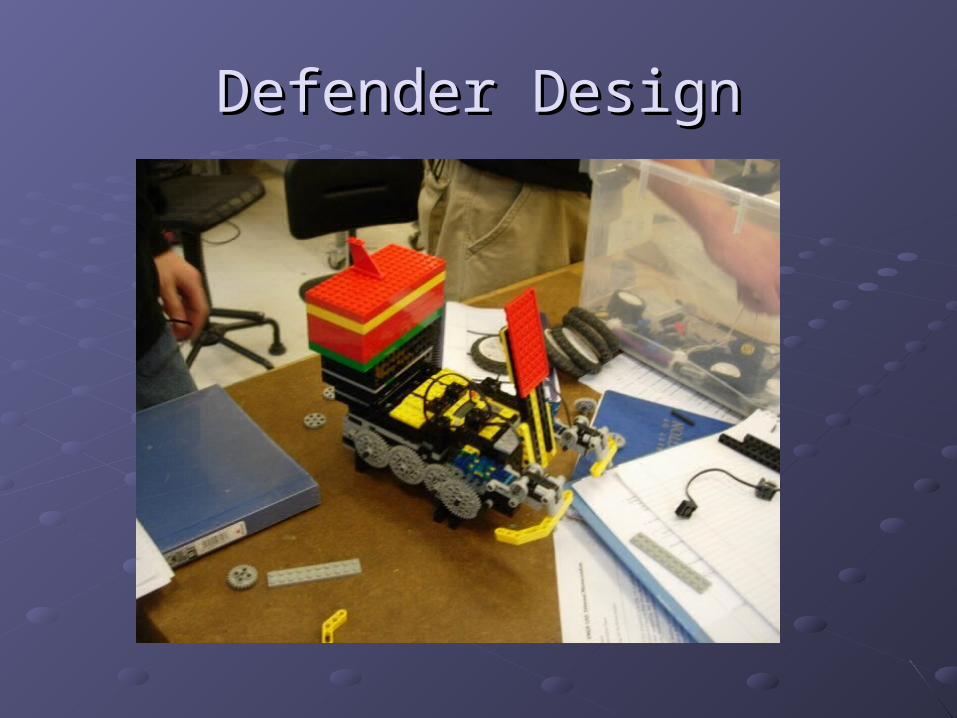
Defender DesignDefender Design

Defender Programming DesignDefender Programming Design
Objective AObjective A Be able to signal when to lift arm; how long?Be able to signal when to lift arm; how long? SolutionSolution
Pressed touch sensors = raise arm for 5 sec.Pressed touch sensors = raise arm for 5 sec.
Objective BObjective B Be within size restriction at startBe within size restriction at start SolutionSolution
Have arm in “up” positionHave arm in “up” position
Lower arm immediately (for 5 sec.)Lower arm immediately (for 5 sec.)
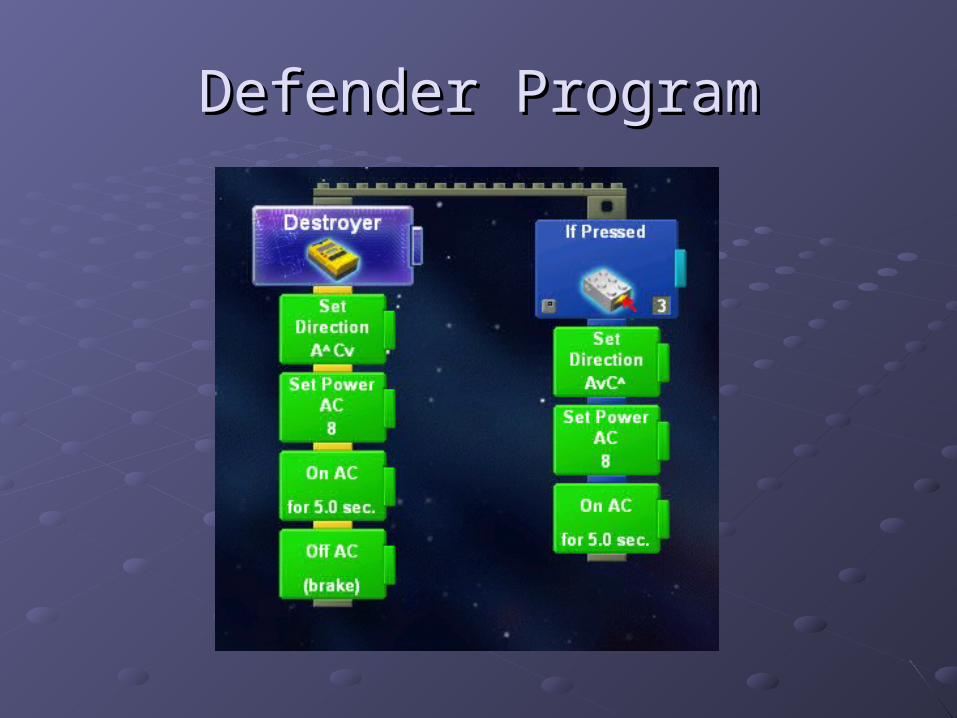
Defender ProgramDefender Program

Defender AdjustmentsDefender Adjustments
Opening performance prompted changesOpening performance prompted changes (specifics discussed in Section III)(specifics discussed in Section III)
Most common method of incapacitationMost common method of incapacitation Robots getting hooked togetherRobots getting hooked together
New DesignNew Design Use physical and programming design of Use physical and programming design of
the car function, sans IR messagethe car function, sans IR messageControlled oscillation = light sensor not neededControlled oscillation = light sensor not needed
RepeatabilityRepeatability

Revised Defender DesignRevised Defender Design


III. Performance ResultsIII. Performance Results
and Discussionand Discussion

Wheelchair – Round 1Wheelchair – Round 1

Wheelchair – Round 1Wheelchair – Round 1
PerformancePerformance CompleteComplete
Ramp, Crosswalk, Ramp, Crosswalk, Correctly Correctly Stopping/Starting, TurnStopping/Starting, Turn
UncompletedUncompletedSteps, Sand PitSteps, Sand Pit
Lack of either power Lack of either power or tractionor traction
UnforeseenUnforeseenDebrisDebris
ChangesChangesPlowing timePlowing time

Wheelchair – Round 2Wheelchair – Round 2
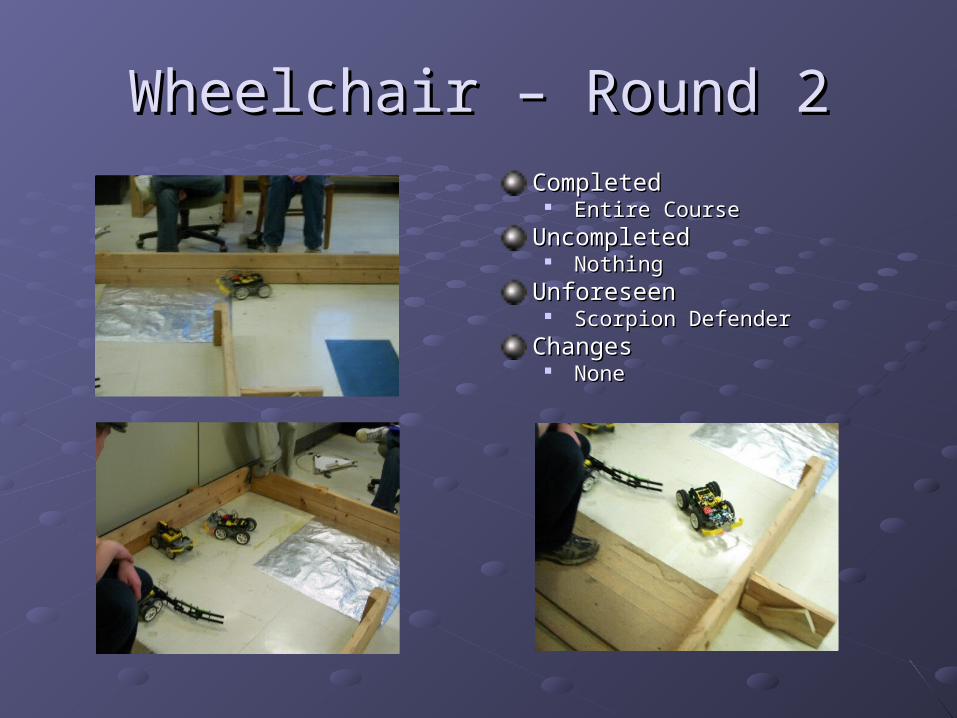
Wheelchair – Round 2Wheelchair – Round 2CompletedCompleted
Entire CourseEntire CourseUncompletedUncompleted
NothingNothingUnforeseenUnforeseen
Scorpion DefenderScorpion DefenderChangesChanges
NoneNone
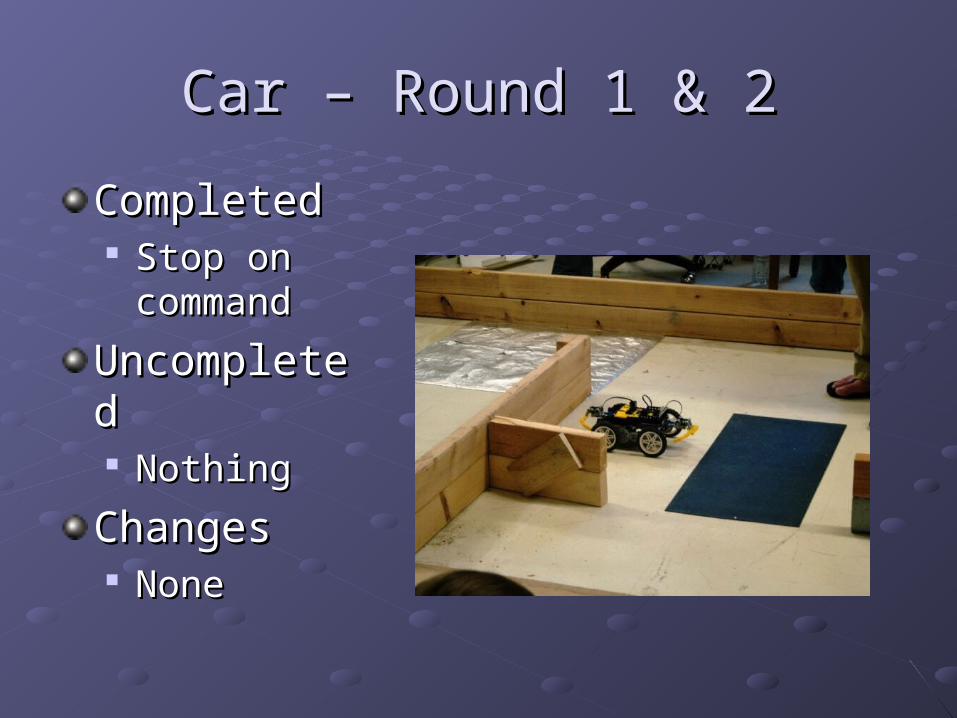
Car – Round 1 & 2Car – Round 1 & 2
CompletedCompleted Stop on Stop on
commandcommand
UncompletedUncompleted NothingNothing
ChangesChanges NoneNone

Defender – Round 1ADefender – Round 1A
CompletedCompleted Functioning Functioning
WeaponWeapon
UncompletedUncompleted Not picking up Not picking up
robotrobot
ChangesChanges Use of car designUse of car design
RecommendationsRecommendations Faster liftFaster lift Bigger liftBigger lift

Defender – Round 1BDefender – Round 1B
CompletedCompleted Block/pinning assistBlock/pinning assist
UncompletedUncompleted Solo-defenderSolo-defender
ChangesChanges NoneNone
RecommendationsRecommendations Simple DesignSimple Design
Defender – Round 2ADefender – Round 2A
CompletedCompleted Block AssistBlock Assist
UncompletedUncompleted Solo-defenderSolo-defender
ChangesChanges NoneNone
RecommendationsRecommendations Add more ways for Add more ways for
robot to grab othersrobot to grab others

Defender – Round 2BDefender – Round 2B
CompletedCompleted Solo-defenderSolo-defender
UncompletedUncompleted NothingNothing
ChangesChanges NoneNone
RecommendationsRecommendations NoneNone

IV.IV. ConclusionConclusion
ConclusionConclusion
Wheelchair – a robot that can complete the obstacle Wheelchair – a robot that can complete the obstacle coursecourse
Wheelchair completed course 1 out of 2 timesWheelchair completed course 1 out of 2 times 4 wheel drive, not plowing4 wheel drive, not plowing
Car – a robot that can go back and forth and stop, but on Car – a robot that can go back and forth and stop, but on the crosswalk, on commandthe crosswalk, on command
AccomplishedAccomplished Touch sensors on both sides attached to one sensor inputTouch sensors on both sides attached to one sensor input
Defender – a robot that stops other groups wheelchairs Defender – a robot that stops other groups wheelchairs from completing the coursefrom completing the course
First defender didn’t workFirst defender didn’t work Second defender accomplished task 2 out of 3 timesSecond defender accomplished task 2 out of 3 times Hooking other robots best, stationary robot no goodHooking other robots best, stationary robot no good
Our robots received the most overall pointsOur robots received the most overall points