fourier transform in image processing. review - image as a function we can think of an image as a...
Post on 19-Dec-2015
217 views
TRANSCRIPT

Fourier Transform in
Image Processing
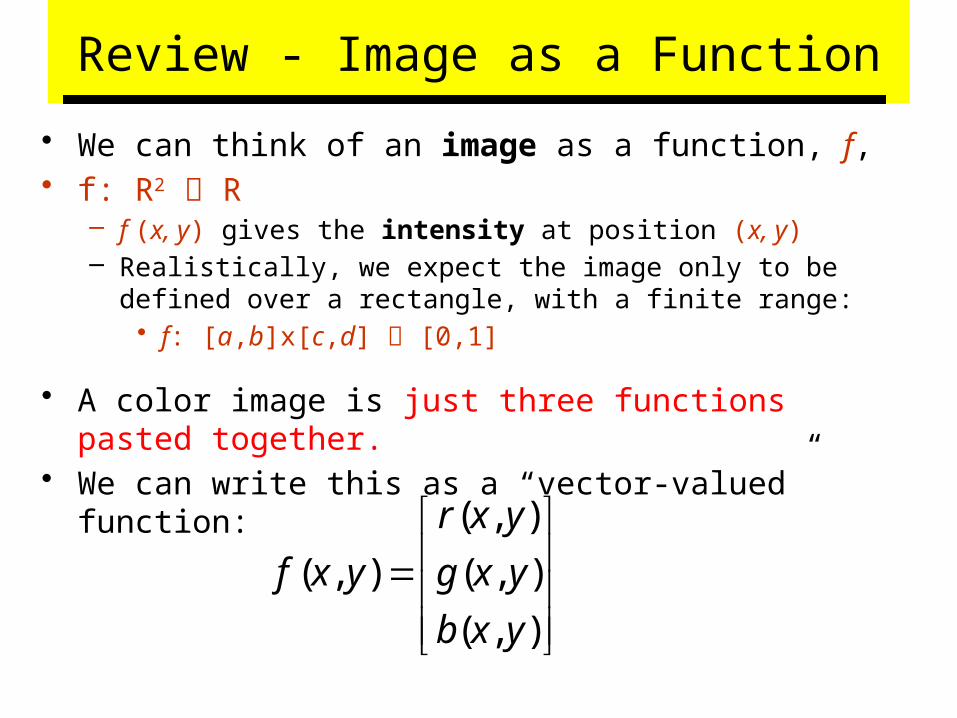
Review - Image as a Function
• We can think of an image as a function, f, • f: R2 R
– f (x, y) gives the intensity at position (x, y) – Realistically, we expect the image only to be defined over a
rectangle, with a finite range:• f: [a,b]x[c,d] [0,1]
• A color image is just three functions pasted together. • We can write this as a “vector-valued” function:
( , )
( , ) ( , )
( , )
r x y
f x y g x y
b x y

Image as a Function
• function, f, • f: R2 R
– f (x, y) gives the intensity at position (x, y)

Linear Transformations
on Images

Transformations on Images
• Define a new image g in terms of an existing image f– We can transform:
1. either the domain
2. or the range of f
• Range transformation:
1. What kinds of operations on the image can this transformation perform?
2. What t transformations are good for what?

1. Some operations preserve the range but change the domain of f
2. Here is an example that changes the domain :
– What kinds of operations can this perform?
3. Still other operations operate on both the domain and the range of f .
Operations that change the domain of image
1. In general we are interested in all these transformations2. Specifically we want them to have some nice (like linear)
properties

Linear Shift Invariant Systems (LSIS)
Linearity:
1f 1g 2f 2g
21 ff 21 gg
Shift invariance:
axf axg
a a

Example of LSIS: ideal lens
Defocused image ( g ) is a processed version of the focused image ( f )
g f
Ideal lens is a LSIS xf xgLSIS
Linearity: Brightness variationShift invariance: Scene movement
(this is not valid for lenses with non-linear distortions)
Linear Shift Invariant Systems (LSIS)
A Reminder of a Convolution
concept

LSIS is Doing a Convolution
convolution is linear and shift invariant
f
hfgdxhfxg
h
h
x
kernel h
Linear Shift Invariant Systems (LSIS)
1. Continuous convolution defined by integral
2. Discrete convolution from previous lectures defined by finite sumsWe negate
(mirror) the kernel of convolution h

Convolution – two more Examples
fg
gf From Eric Weinstein’s Math World
hfgdxhfxg
Here we show two more examples of convolution of functions f and g
We use two non-idea approximation of Dirac’s Delta function as a signal model

1 2-1-2
xc
-1 1
1
xb
-1 1
1 xa
bac
1
Convolution – Another Example hfgdxhfxg
Here we convolve signals a and b into convolved signal c

Convolution Kernel – Impulse Response
f gh hfg
• We ask question “What h will give us g = f ?”
Dirac Delta Function (Unit Impulse)
x2
1
0
dxxfdxxxf 0
00 fdxxf
xfdxfxg
xhdxh
Sifting property: We convolve f with Dirac Delta:
And we get this
Therefore g=f when we convolve with delta

Point Spread Function
OpticalSystemscene image
• Ideally, the optical system should be a Dirac delta function. (no distortion)
x xPSFOpticalSystem
point source point spread function
• However, optical systems are never ideal.
• Point spread function of Human Eyes PSF stands for Point Spread Function
Now we apply information from last slide to optical system
If the PSF of human eye is different (not a good approximation of delta) then we have eye troubles, related to this PSF type

Point Spread Function
normal vision myopia hyperopia
Images by Richmond Eye Associatesastigmatism
PSF stands for Point Spread Function
Tell me what your PSF is and I will tell you what is your eye problem.

Properties of Convolution
• Commutative
• Associativeabba
cbacba • Cascade system
f g1h 2h
f g21 hh
f g12 hh
Convolution operator
We used in cascading filters in previous lectures. Now we have a theoretical base
These are general properties of convolution, not related to signal representation
This is unlike matrix multiplication and Kronecker (tensor) products

• So now we know what is convolution and why it is so important.
• However signals for convolution can be represented in various ways.
• So the question is, “how to represent signals?”– 1D– 2D– 3D?

How to Represent Signals?
• Option 1: Taylor series represents any function using polynomials.
• Polynomials are not the best - unstable and not very physically meaningful. (they still have some applications)
• Easier to talk about “signals” in terms of its “frequencies”
(how fast/often signals change, etc).

Mr. Jean Baptiste Fourier and
Fourier Transform idea

Jean Baptiste Joseph Fourier (1768-1830)
• Had crazy idea (1807):• Any periodic
function can be rewritten as a weighted sum of Sines and Cosines of different frequencies.
• Don’t believe it? – Neither did Lagrange,
Laplace, Poisson and other big wigs
– Not translated into English until 1878!
• But it’s true!– called Fourier Series– Possibly the greatest tool
used in Engineering

A Sum of Sinusoids
• Our building block:
• Add enough of them to get any signal f(x) you want!
• How many degrees of freedom?
• What does each control?
• Which one encodes the coarse vs. fine structure of the signal?
xAsin(

Math Review - Complex numbers
• Real numbers:1-5.2
• Complex numbers4.2 + 3.7i9.4447 – 6.7i-5.2 (-5.2 + 0i)
1i
We often denote in EE i by j

Math Review - Complex numbers
• Complex numbers4.2 + 3.7i9.4447 – 6.7i-5.2 (-5.2 + 0i)
• General FormZ = a + biRe(Z) = a
Im(Z) = b
• AmplitudeA = | Z | = √(a2 + b2)
• Phase = Z = tan-1(b/a)
Real and imaginary parts

Math Review – Complex Numbers
• Polar CoordinateZ = a + bi
• AmplitudeA = √(a2 + b2)
• Phase = tan-1(b/a)
a
b
A

Math Review – Complex Numbers and Cosine Waves
• Cosine wave has three properties– Frequency– Amplitude– Phase
• Complex number has two properties– Amplitude– Wave
• Complex numbers to represent cosine waves at varying frequency– Frequency 1: Z1 = 5 +2i– Frequency 2: Z2 = -3 + 4i– Frequency 3: Z3 = 1.3 – 1.6i
Simple but great idea !!

Fourier Transform Idea
• We want to understand the frequency w of our signal. So, let’s reparameterize the signal by w instead of x:
xAsin(
f(x) F(w)Fourier Transform
F(w) f(x)Inverse Fourier Transform
• For every w from 0 to infinity, F(w) holds the amplitude A and phase f of the corresponding sine
– How can F hold both? Complex number trick!
)()()( iIRF
22 )()( IRA )(
)(tan 1
R
I
All info preserved

Math Review - Periodic
Functions – more illustrations to our formalism

Math Review - Periodic Functions
If there is some a, for a function f(x), such that
f(x) = f(x + na)
then function is periodic with the period a
0
a 2a 3a

Math Review - Attributes of cosine wave
Amplitude
Phase
f(x) = cos (x)
f(x) = 5 cos (x)
f(x) = 5 cos (x + 3.14)
-5
-4
-3
-2
-1
0
1
2
3
4
5
-10 -5 0 5 10
-5
-3
-1
1
3
5
-10 -5 0 5 10
-5
-3
-1
1
3
5
-10 -5 0 5 10

-5
-3
-1
1
3
5
-10 -5 0 5 10
-5
-4
-3
-2
-1
0
1
2
3
4
5
-10 -5 0 5 10
Math Review - Attributes of cosine wave
Amplitude
Phase
Frequency
f(x) = 5 cos (x)
f(x) = 5 cos (x + 3.14)
f(x) = 5 cos (3 x + 3.14) -5
-3
-1
1
3
5
-10 -5 0 5 10

Math Review - Attributes of cosine wave
f(x) = cos (x)
Amplitude, Frequency, Phase
-5
-3
-1
1
3
5
-10 -5 0 5 10
f(x) = A cos (kx + )
This math is base of Fourier Analysis and Fourier Synthesis

Time and Frequency• example : g(t) = sin(2 f t) + (1/3)sin(2(3f) t)
Before we go to using complex numbers and formulas let us get intuition about time and frequency
Our periodic signal is a mixture of two frequencies

Time and Frequency
• example : g(t) = sin(2 f t) + (1/3)sin(2(3f) t)
= +

Frequency Spectra• example : g(t) = sin(2pf t) + (1/3)sin(2p(3f)
t)
= +
In time domain
In frequency domain

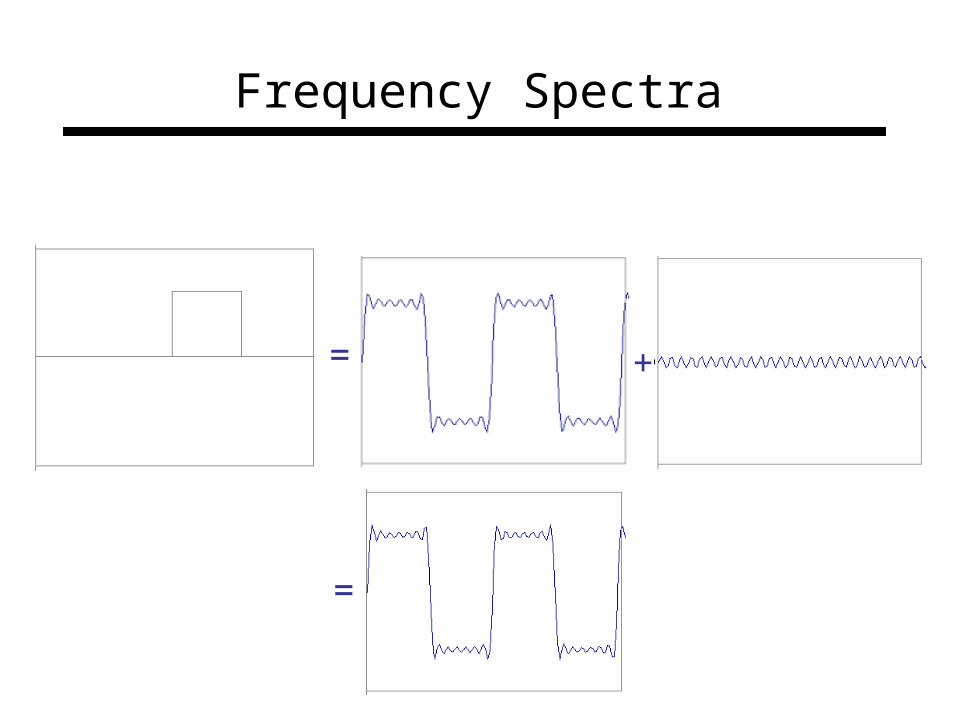
Frequency Spectra
• Usually, frequency is more interesting than the phase
1. We will decompose it to frequencies, 2. we will add one more coefficient based base
function in each slide

= +
=
Frequency Spectra
First base function second base function
Sum of first and second base functions is already not bad approximation

= +
=
Frequency Spectra
Sum of first , second and third base functions is even better approximation

= +
=
Frequency Spectra

= +
=
Frequency Spectra
= +
=
Frequency Spectra

= 1
1sin(2 )
k
A ktk
Frequency Spectra
In time domain
In frequency domain

Frequency Spectra
Observe the negative values of domain that appear in spectrum

Fourier Transform is
Just a change of basis
Important concept

Fourier Transform is Just a change of basis
.
.
.
* =
M * f(x) = F(w) M can be a matrix, a decision diagram, a butterfly, a system (physical or simulated)

IFT: Just a change of basis
.
.
.
* =
M-1 * F(w) = f(x)Inverse Fourier Transform is similarly only a change of basis
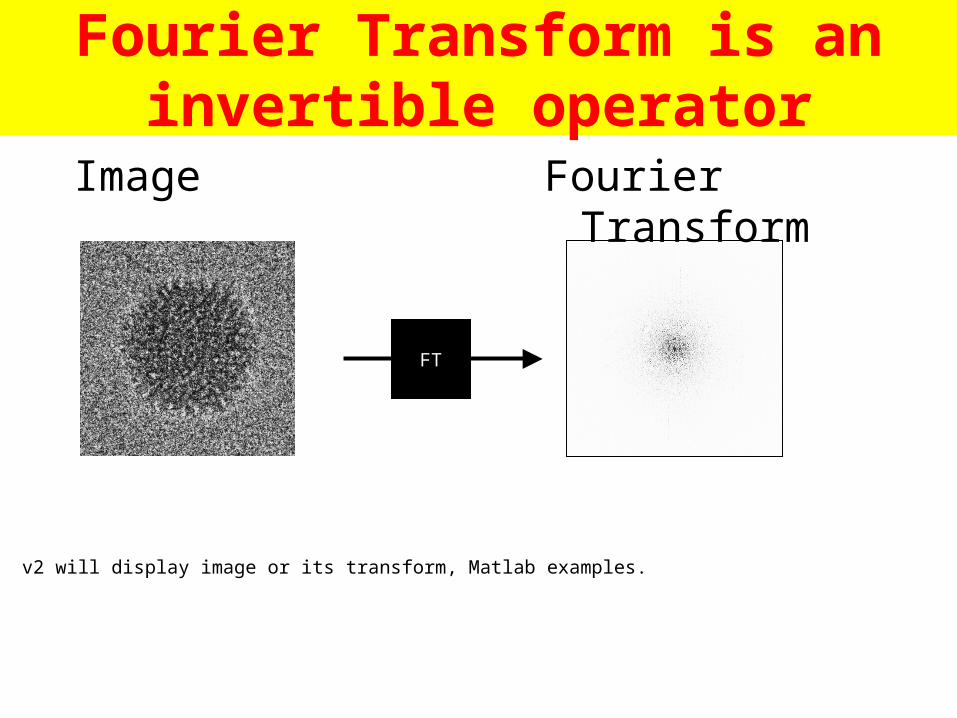
Fourier Transform is an invertible operator
Image Fourier Transform
v2 will display image or its transform, Matlab examples.
FT

Fourier Transform is an invertible operator
Image
f(x,y)F(kx,ky)
x
y
0 Nx
Ny
{F(kx,ky)} = f(x,y)} {f(x,y)} = F(kx,ky)
Nx ⁄ 2
Ny ⁄ 2Fourier Transform
Similarly as for Hadamard-Walsh or Reed-Muller Transforms we can talk about transform pairs.

Continuous Fourier
Transform

Continuous Fourier Transform
dsesFxf
dxexfsF
xsi
xsi
2
2
)()(
)()(
dsesFxf
dxexfsF
ixs
ixs
)(2
1)(
)()(
dsesFxf
dxexfsF
ixs
ixs
)(2
1)(
)(2
1)(
f(x) = F(s)
Euler’s Formula
Various normalizations of pairs

Some Conventions for Fourier Transforms
• Image Domain
• Forward Transform
• f(x,y,z)• g(x)• F
• Fourier Domain– Reciprocal space– Fourier Space– K-space– Frequency Space– Spectral domain
• Reverse Transform, Inverse Transform
• F(kx,ky,kz)• G(s)• F

Fourier Analysis
Decompose f(x) into a series of cosine waves that when summed reconstruct f(x)

Fourier Analysis in 1D. Audio signals
-5
-4
-3
-2
-1
0
1
2
3
4
5
0 200 400 600 800 1000 1200 1400
-5
-4
-3
-2
-1
0
1
2
3
4
5
0 200 400 600 800 1000 1200 1400
5 10 15
(Hz)
5 10 15
(Hz)
Amplitude OnlyAmplitude Only

Fourier Analysis in 1D. Audio signals
-5
-4
-3
-2
-1
0
1
2
3
4
5
0 200 400 600 800 1000 1200 1400
5 10 15
(Hz)
Your ear performs fourier analysis.

Fourier Analysis in 1D. Spectrum Analyzer.
iTunes performs fourier analysis.
1. We know it from our Hi-Fi equipment2. The same can be done with standard images or radar images or any other images, in
any number of dimensions

Fourier Synthesis
Summing cosine waves reconstructs the original function

Example: Fourier Synthesis of Boxcar Function
Boxcar function
Periodic Boxcar
Can this function be reproduced with cosine waves?

k=1. One cycle per period
A1·cos(2kx + 1)k=1
Ak·cos(2kx + k)k=1
1

k=2. Two cycles per period
A2·cos(2kx + 2)k=2
Ak·cos(2kx + k)k=1
2

k=3. Three cycles per period
A3·cos(2kx + 3)k=3
Ak·cos(2kx + k)k=1
3

Ak·cos(2kx + k)N
Fourier Synthesis. N Cycles
A3·cos(2kx + 3)k=3
k=1

Example: Fourier Synthesis of a 2D Function
An image is two dimensional data.
Intensities as a function of x,y
White pixels represent the highest intensities.
Greyscale image of iris128x128 pixels

Fourier Synthesis of a 2D Function
F(2,3)F(2,3)
1. We select coefficients, multiply them by weights and add2. We can create artificial images

Fourier Filters• Fourier Filters in 1D data (sound) change
the image by changing which frequencies of cosine waves go into the image
• Represented by 1D spectral profile
• 2D Specteral Profile is rotationally symmetrized 1D profile

Low and High Frequency Image Filters
• Low frequency terms– Close to origin in Fourier Space– Changes with great spatial extent (like ice
gradient), or particle size
• High frequency terms– Closer to edge in Fourier Space– Necessary to represent edges or high-
resolution features

Frequency-based Filters
1. Low-pass Filter (blurs) – Restricts data to low-frequency components
2. High-pass Filter (sharpens) – Restricts data to high-frequency-components
3. Band-pass Filter– Restrict data to a band of frequencies
4. Band-stop Filter– Suppress a certain band of frequencies
We will show many practical examples soon

Cutoff Low-pass FilterImage is blurred
Sharp features are lost
Ringing artifacts
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.2 0.4 0.6 0.8 1
Filter characteristics

Butterworth Low-pass FilterFlat in the pass-
band
Zero in the stop-band
No ringing

Gaussian Low-pass Filter
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.2 0.4 0.6 0.8 1

Butterworth High-pass Filter
• Note the loss of solid densities

How the filter looks in 2D
unprocessed
lowpass
highpass
bandpass
spectra

Convolution again
Our goal is now to approach the most important results of spectral processing

ConvolutionConvolution of some function f(x) with
some kernel g(x)
* =
Continuous
Discrete

x x
Convolution in 2D
x
x x
=
x
x x
=
x x
x x
x x
x x
image kernel result

Microscope Point-Spread-Function is Convolution
Point-Spread-Function

Convolution Theorem
f g = {FG}
f = FG
G
Convolution in image domainIs equivalent to multiplication in fourier domain
Can be derived from above because FG/G = F and f = F-1 (F)

Lowpass Filtering by Convolution
f g = {FG}• Camera shake
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.2 0.4 0.6 0.8 1
We showed examples of this using standard convolution, but it is done in modern equipment through digitally calculated FFT and IFFT
2D gaussian is example of kernel
2D gaussian as a matrix of a kernel

Lens Performs Fourier Transform

Contrast Theory
observed image
f(x) for true particle
point-spread function
envelope function
noise
obs(x) = f(x) psf(x) env(x) + n(x)
Incoherant average of transform
F2(s) CTF2(s) Env2(s) + N2(s)
Power spectrum
PS =

Gibbs Ringing
• 5 waves
• 25 waves
• 125 waves
Even with 125 waves we still have some small Gibbs Ringing

Fourier Transform
Math Properties
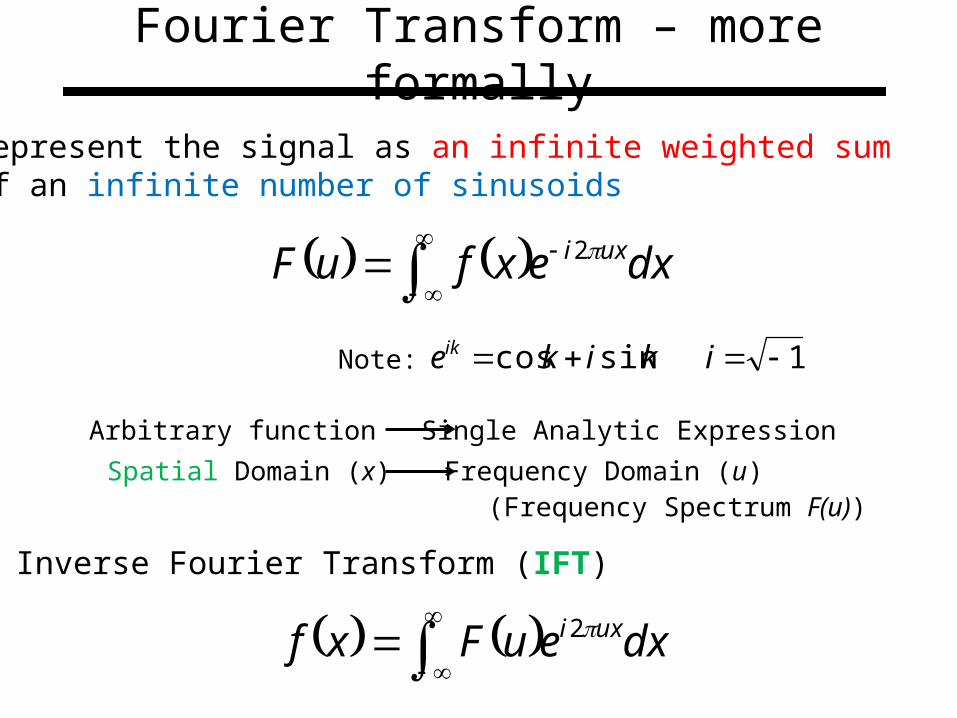
Fourier Transform – more formally
Arbitrary function Single Analytic Expression
Spatial Domain (x) Frequency Domain (u)
Represent the signal as an infinite weighted sum of an infinite number of sinusoids
dxexfuF uxi 2
(Frequency Spectrum F(u))
1sincos ikikeikNote:
Inverse Fourier Transform (IFT)
dxeuFxf uxi 2

• Also, defined as:
dxexfuF iux
1sincos ikikeikNote:
• Inverse Fourier Transform (IFT)
dxeuFxf iux
2
1
Fourier Transform
Fourier Transform

Fourier Transform
Pairs (I)
angular frequency ( )iuxeNote that these are derived using
Fourier Transform

Fourier Transform Pairs (I)
angular frequency ( )iuxeNote that these are derived using
Fourier Transform

angular frequency ( )iuxe
Note that these are derived using
Fourier Transform Pairs (I)

Fourier Transform and Convolution
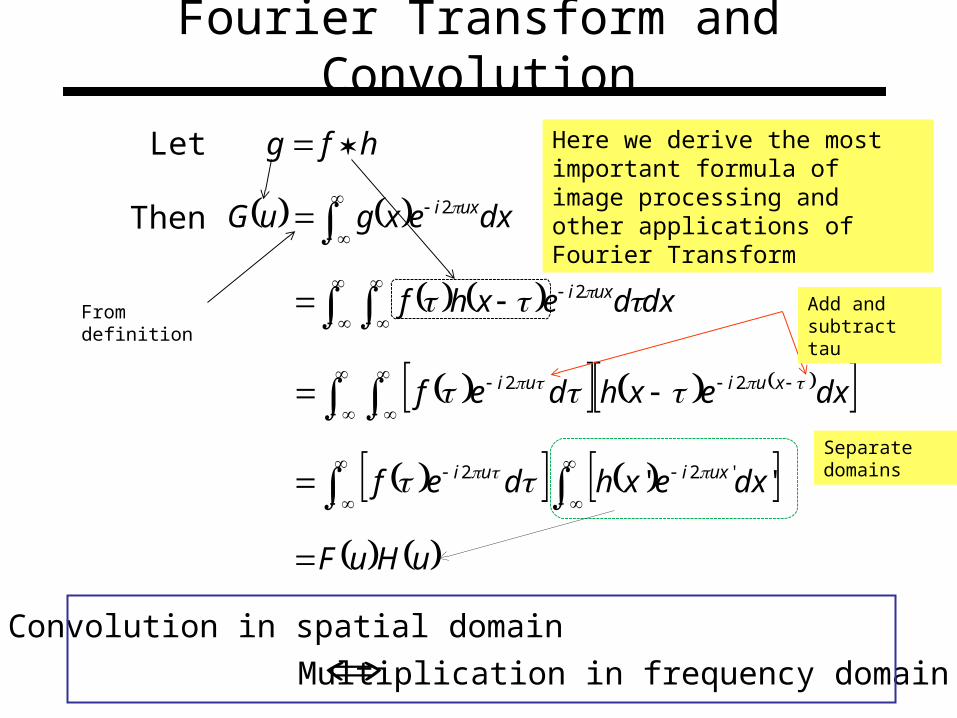
Fourier Transform and Convolution
hfg
dxexguG uxi 2
dxdexhf uxi 2
dxexhdef xuiui 22
'' '22 dxexhdef uxiui
Let
Then
uHuF
Convolution in spatial domain
Multiplication in frequency domain
Here we derive the most important formula of image processing and other applications of Fourier Transform
Add and subtract tau
From definition
Separate domains

MAIN THEOREM OF MODERN IMAGE PROCESSING:
Convolution in spatial domain
Multiplication in frequency domain

Fourier Transform and Convolution
hfg FHG fhg HFG
Spatial Domain (x) Frequency Domain (u)
So, we can find g(x) by Fourier transform
g f h
G F H
FT FTIFT

Properties of Fourier
Transform

Properties of Fourier Transform 1Spatial Domain (x) Frequency Domain (u)
Linearity xgcxfc 21 uGcuFc 21
Scaling axf
a
uF
a
1
Shifting 0xxf uFe uxi 02
Symmetry xF uf
Conjugation xf uF
Convolution xgxf uGuF
Differentiation n
n
dx
xfd uFui n2
frequency ( )uxie 2Note that these are derived using

Properties of Fourier Transform 2
Star will be used for conjugation in complex plane
1. RO – real odd2. IE – imaginary even3. IO – imaginary odd4. RE – Real even5. CE – Complex even6. CO – Complex odd
Substitute f instead of g in this formula to get the upper formula
We explained even-odd properties for Walsh, we will explain again for other transforms
For instance, when f is R then F is RE, IO,. etc

Example use of Fourier: Smoothing/Blurring
1. We want a smoothed function of f(x)
xhxfxg
H(u) attenuates high frequencies in F(u) (Low-pass Filter)!
• 3. Then
222
2
1exp uuH
uHuFuG
2
1
u
uH
2
2
2
1exp
2
1
x
xh
• 2. Let us use a Gaussian kernel
xh
x
But we do this in spectral domain

Our Images are Discrete
so discrete Fourier applies

Image as a Discrete Function

Digital Images
The scene is– projected on a 2D plane, – sampled on a regular grid, and each sample is– quantized (rounded to the nearest integer)
Image as a matrix
jifjif ,Quantize,

ReviewFourier Transform is invertible operator
Math ReviewPeriodic functions
Amplitude, Phase and Frequency
Complex numberAmplitude and Phase
Fourier Analysis (Forward Transform)Decomposition of periodic signal into cosine waves
Fourier Synthesis (Inverse Transform)Summation of cosine waves into multi-frequency waveform
Fourier Transforms in 1D, 2D, 3D, ND
Image AnalysisImage (real-valued)Transform (complex-valued,
amplitude plot)
Fourier FiltersLow-pass High-pass Band-passBand-stop
Convolution TheoremDeconvolute by Division in
Fourier Space
All Fourier Filters can be expressed as real-space Convolution Kernels
Lens does Fourier transforms Diffraction Microscopy

Where we are in this class?
• We defined continuous Fourier Transform• We defined discrete Fourier Transform DFT• DFT is calculated by matrix multiplication• It is slow• We will need factorizations, Kroneckers,
recursions and butterflies to calculate it faster.
• Only then FT will become a really useful tool, FFT.

Further Reading
• Wikipedia• Mathworld• The Fourier Transform and its
Applications. Ronald Bracewell


Filtering with EMAN2LowPass Filtersfiltered=image.process(‘filter.lowpass.guass’, {‘sigma’:0.10})
filtered=image.process(‘filter.lowpass.butterworth’, {‘low_cutoff_frequency’:0.10, ‘high_cutoff_frequency’:0.35})
filtered=image.process(‘filter.lowpass.tanh’, {‘cutoff_frequency’:0.10, ‘falloff’:0.2})
HighPass Filtersfiltered=image.process(‘filter.highpass.guass’, {‘sigma’:0.10})
filtered=image.process(‘filter.highpass.butterworth’, {‘low_cutoff_frequency’:0.10, ‘high_cutoff_frequency’:0.35})
filtered=image.process(‘filter.highpass.tanh’, {‘cutoff_frequency’:0.10, ‘falloff’:0.2})
BandPass Filtersfiltered=image.process(‘filter.bandpass.guass’, {‘center’:0.2,‘sigma’:0.10})
filtered=image.process(‘filter.bandpass.butterworth’, {‘low_cutoff_frequency’:0.10, ‘high_cutoff_frequency’:0.35})
filtered=image.process(‘filter.bandpass.tanh’, {‘cutoff_frequency’:0.10, ‘falloff’:0.2})

1. S. Narasimhan
2. Mike Marsh
National Center for Macromolecular Imaging
Baylor College of Medicine
Sources of slides