encyclopedia of ocean sciences || autonomous underwater vehicles (auvs)
TRANSCRIPT
Pelagic Open ocean environment. A marine sedi-ment with that fraction derived from the conti-nents indicating deposition from a dilutesuspension distributed throughout deep-sea water.
Phyllosilicate Layered or sheet silicate mineral,formed by sharing three of the four oxygens inneighboring silicon tetrahedra.
Plankton Aquatic organisms that drift, or swimweakly. Can be either plants (phytoplankton) oranimals (zooplankton).
Redox Abbreviation for reduction}oxidation, usu-ally expressed as a potential.
Seamount Underwater mountain, 1000 m or higherelevation from seaSoor base. Morphology may bepeaked or Sat-topped, with the latter called guyot.
Suboxic Condition lacking free oxygen, but notextremely reducing.
Zeolite Any of the minerals of the zeolite group.Aluminosilicate minerals with an open frameworkstructure that allows for easily reversible hy-dration, gas adsorption, and either cation or ani-on exchange.
See also
Aeolian Inputs. Clay Mineralogy. HydrothermalVent Deposits. Manganese Nodules. Mineral Ex-traction, Authigenic Minerals. Platinum Group Ele-ments and their Isotopes in the Ocean. Pore WaterChemistry. Rare Earth Elements and their Iso-topes in the Ocean. River Inputs. Sediment Chro-nologies. Sedimentary Record, Reconstruction ofProductivity from the. Tracers of Ocean Productiv-ity. Transition Metals and Heavy Metal Speciation.
Uranium+Thorium Decay Series in the OceansOverview.
Further ReadingBentor YK (ed.) (1980) Marine Phosphorites; a Sympo-
sium, Oklahoma: SEPM Special Publication no. 29.Burns RG and Burns VM (1981) Authigenic oxides. In:
The Sea, vol. 7, pp. 875}914. New York: Wiley.Chamley H (1989) Clay Sedimentology. Berlin: Springer-
Verlag.Cronan DS (1974) Authigenic minerals in deep-sea sedi-
ments. In: Goldberg ED (ed.) The Sea, vol. 5, pp.491}525. New York: Wiley.
Cronan DS (1980) Underwater Minerals. London: Aca-demic Press.
Cronan DS (ed.) (2000) Handbook of Marine MineralDeposits. Boca Raton, FL: CRC Press.
Glasby GP (ed.) (1977) Marine Manganese Deposits. Else-vier Oceanography Series. Amsterdam: Elsevier.
Glenn CR, PreH vot-Lucas L and Lucas J (eds.) (2000)Marine Authigenesis: from Global to Microbial.Oklahoma: SEPM Special publication no. 66.
Halbach P, Friedrich G and von Stackelberg U (eds.)(1988) The Manganese Nodule Belt of the PaciTcOcean: Geological Environment, Nodule Formation,and Mining Aspects. Stuttgart: F. Enke Verlag.
Kastner M (1981) Authigenic silicates in deep-sea sedi-ments: formation and diagenesis. In: Emiliani C (ed.)The Sea, vol. 7, 915}980. New York: Wiley.
Manheim FT (1986) Marine cobalt resources. Science232, 600}608.
Margolis SV and Burns RG (1976) PaciRc deep-sea man-ganese nodules: their distribution, composition, andorigin. Annual Review of Earth and Planetary Science4: 229}263.
AUTONOMOUS UNDERWATER VEHICLES (AUVs)
James Bellingham, MIT Sea Grant, Cambridge,MA, USA
Copyright ^ 2001 Academic Press
doi:10.1006/rwos.2001.0303
An autonomous underwater vehicle (AUV) is anuncrewed, untethered, underwater vehicle capableof self-propulsion. Such vehicles are mobile instru-mentation platforms that have actuators, sensors,and on-board intelligence to successfully completesurvey and sampling type tasks with little or nohuman supervision. A large number of AUVs havebeen developed, ranging in dry weights from lessthan 50 kg to nearly 9000kg, with the majority of
vehicles at the small end of the scale. In the lastseveral years, acceptance of AUVs for oceano-graphic, commercial, and military missions has risendramatically, leading to a sharp rise in AUV opera-tions.
By far the most common AUV conRguration is asa torpedo-like vehicle, consisting of a streamlinedbody with propeller and control surfaces at the stern(Figure 1). Operational speeds for such vehiclesrange from 0.5 to 5 m s�1, with most vehicles oper-ating at a cruising speed of about 1.5 m s�1. In orderto remain controllable, torpedo-like AUVs mustmove forward at some minimum speed in order tomaintain Sow over control surfaces, and thereforeare not capable of station keeping. When a higher
212 AUTONOMOUS UNDERWATER VEHICLES (AUVs)
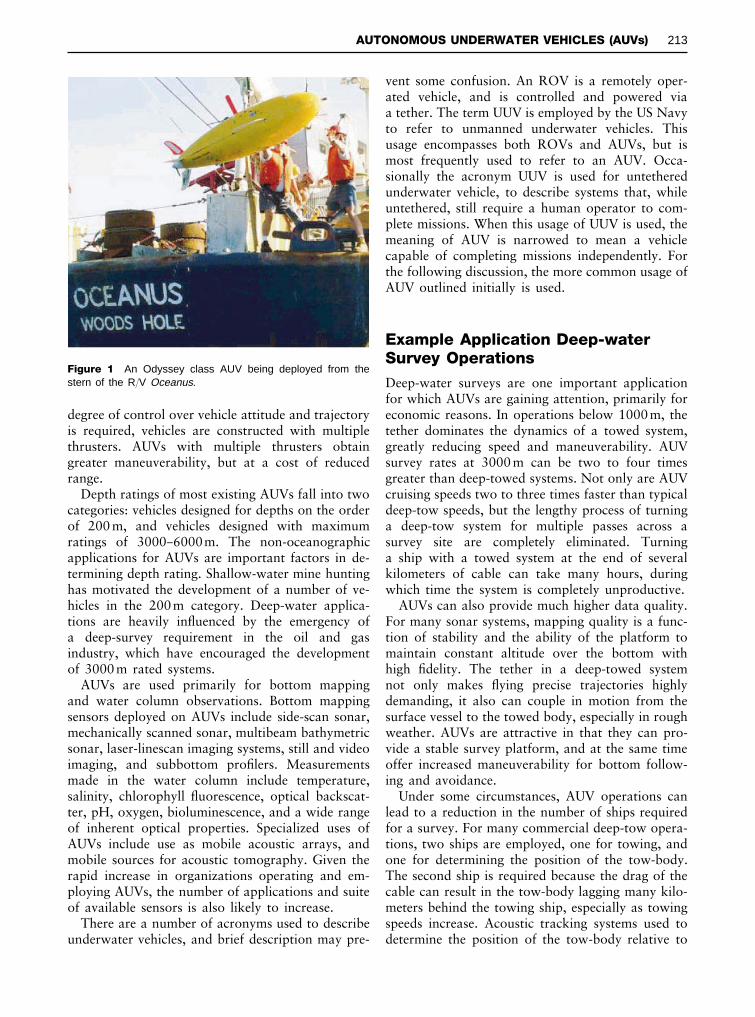
Figure 1 An Odyssey class AUV being deployed from thestern of the R/V Oceanus.
degree of control over vehicle attitude and trajectoryis required, vehicles are constructed with multiplethrusters. AUVs with multiple thrusters obtaingreater maneuverability, but at a cost of reducedrange.
Depth ratings of most existing AUVs fall into twocategories: vehicles designed for depths on the orderof 200 m, and vehicles designed with maximumratings of 3000}6000m. The non-oceanographicapplications for AUVs are important factors in de-termining depth rating. Shallow-water mine huntinghas motivated the development of a number of ve-hicles in the 200m category. Deep-water applica-tions are heavily inSuenced by the emergency ofa deep-survey requirement in the oil and gasindustry, which have encouraged the developmentof 3000m rated systems.
AUVs are used primarily for bottom mappingand water column observations. Bottom mappingsensors deployed on AUVs include side-scan sonar,mechanically scanned sonar, multibeam bathymetricsonar, laser-linescan imaging systems, still and videoimaging, and subbottom proRlers. Measurementsmade in the water column include temperature,salinity, chlorophyll Suorescence, optical backscat-ter, pH, oxygen, bioluminescence, and a wide rangeof inherent optical properties. Specialized uses ofAUVs include use as mobile acoustic arrays, andmobile sources for acoustic tomography. Given therapid increase in organizations operating and em-ploying AUVs, the number of applications and suiteof available sensors is also likely to increase.
There are a number of acronyms used to describeunderwater vehicles, and brief description may pre-
vent some confusion. An ROV is a remotely oper-ated vehicle, and is controlled and powered viaa tether. The term UUV is employed by the US Navyto refer to unmanned underwater vehicles. Thisusage encompasses both ROVs and AUVs, but ismost frequently used to refer to an AUV. Occa-sionally the acronym UUV is used for untetheredunderwater vehicle, to describe systems that, whileuntethered, still require a human operator to com-plete missions. When this usage of UUV is used, themeaning of AUV is narrowed to mean a vehiclecapable of completing missions independently. Forthe following discussion, the more common usage ofAUV outlined initially is used.
Example Application Deep-waterSurvey Operations
Deep-water surveys are one important applicationfor which AUVs are gaining attention, primarily foreconomic reasons. In operations below 1000m, thetether dominates the dynamics of a towed system,greatly reducing speed and maneuverability. AUVsurvey rates at 3000 m can be two to four timesgreater than deep-towed systems. Not only are AUVcruising speeds two to three times faster than typicaldeep-tow speeds, but the lengthy process of turninga deep-tow system for multiple passes across asurvey site are completely eliminated. Turninga ship with a towed system at the end of severalkilometers of cable can take many hours, duringwhich time the system is completely unproductive.
AUVs can also provide much higher data quality.For many sonar systems, mapping quality is a func-tion of stability and the ability of the platform tomaintain constant altitude over the bottom withhigh Rdelity. The tether in a deep-towed systemnot only makes Sying precise trajectories highlydemanding, it also can couple in motion from thesurface vessel to the towed body, especially in roughweather. AUVs are attractive in that they can pro-vide a stable survey platform, and at the same timeoffer increased maneuverability for bottom follow-ing and avoidance.
Under some circumstances, AUV operations canlead to a reduction in the number of ships requiredfor a survey. For many commercial deep-tow opera-tions, two ships are employed, one for towing, andone for determining the position of the tow-body.The second ship is required because the drag of thecable can result in the tow-body lagging many kilo-meters behind the towing ship, especially as towingspeeds increase. Acoustic tracking systems used todetermine the position of the tow-body relative to
AUTONOMOUS UNDERWATER VEHICLES (AUVs) 213
the ship cannot be used effectively by the towingship. Thus a second ship is required to maintainstation above the tow body for optimal tracking.For AUV operations there is no tether constrainingthe location of the AUV support vessel and thus thesame ship can provide tracking.
A Rnal attractive feature of AUVs is the potentialfor multiple vehicle surveys. Although multiplevehicle operations have been limited to shallowwater thus far, the potential for increasing surveyrates by employing two or more AUVs simulta-neously is especially attractive for abyssal opera-tions. This is not an option for deep-tow systemsoperated from a single surface vessel.
Control
Control of AUVs can be roughly divided into threelevels: dynamic control, task control, and missioncontrol. These refer respectively to the processes ofcontrolling vehicle attitude and position, of achiev-ing speciRc tasks, and of achieving a series of tasksas part of a more complex mission. For fully auton-omous systems, the onboard computer must achieveall of these. When acoustic communications areavailable, hybrid control techniques can also beused in which a human operator provides somemission or task-level control, referred to as super-visory control. Although control remains an activearea of research, the present state-of-the art providesthe ability to perform a wide variety of surveymissions.
At present, AUVs are generally capable of con-ducting missions involving Sying speciRed trajecto-ries through space. The trajectories might be verysimple } a straight line, for instance } or mightinvolve a length sequence of tracklines, waypoints,and depth excursions. For Sight proRles that ap-proach the bottom, most AUVs are capable of usingsonar to follow terrain at constant altitude andavoid bottom collisions. The ability of a speciRcvehicle to operate near the bottom depends on thebottom relief, the maneuverability of the vehicle,and the bottom sensing capabilities of the vehicle. Ingeneral, operation near-bottom in regions with cliffsor escarpments is very difRcult with the current stateof the art. More sophisticated operations involvehaving the AUV adapt its survey on the basis ofdata acquired during operations. For example, avehicle proRling a section of the water columnmight be programmed to follow a thermocline. Al-though such capabilities are used by experiencedoperators, they are not routinely available.
Some challenges associated with fully auton-omous operations can be avoided by using acoustic
communications to link a human operator with theAUV. However, the relatively low bandwidth, shortranges, and time lag prevent excessive reliance onacoustic communications. Performance is highly de-pendent on the environmental characteristics of theoperating environment. One might expect to obtain0.1}20kbit s�1 communications over a distance of4 km depending on the acoustic properties of thewater medium between the vehicle and the supportvessel. The lower bandwidths, or even no commun-ications at all, would be expected when operating inwater much shallower than the separation betweenthe ship and the AUV. Higher communication ratescan be obtained when operating in deep water, withthe ship directly over the AUV. Even when high-bandwidth communications are available, limita-tions imposed by the speed of sound in water meanthat AUVs must be capable of handling any eventrequiring a rapid response. For example, a separ-ation of 5 km requires about 6.7 s for round-tripacoustic communication. This introduces a com-munications latency requiring the vehicle softwarebe sufRciently intelligent to handle dynamic controland tasks such as bottom avoidance.
Navigation
No single navigation system solves all, or eventhe majority, of navigation demands for AUVoperations. Consequently, a variety of navigationmethods have been developed each satisfying certainclasses of missions. These techniques can be groupedinto three general categories: inertial, long-baseline,and ship-tracked navigation. Other methods areunder development or used under special conditions,such as feature-relative navigation, but the bulk ofAUV operations employ some combination of thefollowing three.
Inertial navigation is used primarily on larger,more expensive AUVs, although continued develop-ment promises to make this capability economicalfor smaller vehicles. Usually the navigation suiteconsists of an Inertial Navigation System (INS),a velocity sensor, and a Global Positioning System(GPS) receiver. The GPS is required to initialize thenavigation system, and for position determinationwhen the AUV is on the surface. Although very highperformance INSs exist, those appropriate for AUVsare limited in performance to position drift rates onthe order of several kilometers per hour in the ab-sence of other navigation aids. Substantial improve-ment in performance can be achieved by providingan earth-relative velocity estimate to the INS.A Doppler Velocity Log (DVL) measures velocityrelative to an acoustic scatterer, typically the
214 AUTONOMOUS UNDERWATER VEHICLES (AUVs)

seaSoor. A well-integrated INS}DVL system canprovide navigation accuracy better than 0.1% ofdistance traveled. Thus a vehicle traveling 100 kmwill know its position with an accuracy better than100 m at the end of the run. However a DVL oper-ates best at high acoustic frequencies, which areheavily attenuated by sea water. Therefore, presentDVL assisted navigation is usually limited to alti-tudes no more than 20}200 m off the bottom, de-pending on the precise frequency system employed.For applications that impose the requirement of op-erating further from the seaSoor, correlation velo-city logs can be used in place of a DVL. Correlationlogs operate at low frequencies compared to Dop-pler navigation systems, and can be operated atgreater altitudes over the seaSoor, although suchsystems are much less readily available.
Long-baseline (LBL) tracking systems use a wide-ly separated array of acoustic transponders or syn-chronized pingers that are interrogated or detectedby the vehicle. Depending on the frequencies em-ployed, array sizes can range from a hundred metersto signiRcant fractions of an ocean basin. The mostcommonly used LBL systems employ 7.5}15 kHzfrequency transponders, and are used to cover re-gions up to a few hundred square kilometers in sizewith accuracies as good as several meters. Theequipment and logistical costs of LBL navigationcan be substantial, since the number of acousticbeacons which must be deployed and whose posi-tion must be determined can be large. Water depthtypically determines the number of beacons re-quired, with a commonly employed rule of thumbstating that transponders should be separated by nomore than twice the total water depth. Accuracy ofLBL navigation is usually environmentally limited.Variations in the speed of sound can signiRcantlyeffect the time for an acoustic pulse to travel be-tween two points, and can even lead to shadowingeffects effectively precluding sound transmission, forexample across a thermocline. Multipath, which isthe phenomenon whereby a transmitted pulse rever-berates in the underwater environment, leads toambiguity in arrival detection and greatly compli-cates the process of relating time-of-Sight to range.Consequently, LBL navigation, although providingthe best navigation accuracy of any underwaternavigation system, requires expert operators andcan incur substantial costs.
Ship-tracked methods use a surface vessel tomonitor the position of an AUV. Although thisrequires dedicating a ship to AUV operations, iteliminates the need for deploying an extensive arrayof transponders as would be required for LBL navi-gation. Such systems are attractive in that they are
not limited by the geographic coverage of an arrayof acoustic beacons, and do not have a navigationaccuracy which deteriorates with time as do iner-tial-base systems. Tracking an AUV from a surfacevessel is accomplished acoustically, with both USBL(ultrashort-baseline) and SBL (short-baseline) sys-tems being employed to provide direction and rangeto a transponder-equipped submerged vehicle. Thisship-relative location is turned into a geographicposition by measuring the ship’s position and atti-tude. The accuracy of USBL- and SBL-based track-ing deteriorates as the separation of the ship and theAUV increases, with signiRcant consequences fordeep-water operations. Consequently, some deep-water survey strategies with AUVs employ a hybridof ship-based tracking and inertial navigation.
Energy and Vehicle Performance
Energy is a limiting factor for many AUV applica-tions, restricting range, and inhibiting the use ofcertain power consumptive technologies. Althoughruns of several hundred kilometers have beenachieved by some of the larger AUVs, smallervehicles typically are used for runs of less thana hundred kilometers.
Propulsion typically consumes a large fraction ofthe power required to operate an AUV. The amountof energy required to move a vehicle through thewater is a function of both the drag of the vehicle,and of the efRciency of the propulsion system. Thedrag characteristics of a vehicle are dependent onsuch factors as the vehicle size, shape, surface Rnish,appendages, and oriRces. Propulsion systems loseefRciency to such mechanisms as electrical motorlosses, gearbox inefRciency, shaft seal friction, vis-cous losses, and hydrodynamic inefRciency of thepropeller. Considerations such as the interaction ofthe wake of the hull and the inSow of a propulsionsystem are also important to achieving optimal efR-ciency. Consequently, vehicles designed for rangeand speed tend to have streamlined hulls witha minimum of appendages or oriRces, and a singleefRcient propeller at the stern.
Hotel load is used to describe power consumed bythe vehicles for functions other than propulsion.Computers, altimeter sonar, payload sensors, depthsensor, attitude sensors, and navigation are allsystems that contribute to hotel load. Reduction inhotel load is clearly attractive, and is assisted bycontinuing advances in computers and low-powerelectronics. However it is not unusual for some sys-tems, for example sonars or optical imaging systemsrequiring lighting, to be governed by physical con-siderations driving power consumption. This in turn
AUTONOMOUS UNDERWATER VEHICLES (AUVs) 215
1
10
100
1000
0.1 1 10AUV speed (m s_1)
Ran
ge (
km)
Hotel = 10 W
Hotel = 40 W
Hotel = 160 W
Figure 2 Range as a function of hotel load and speed. Thesecalculations were made for a low drag 2.2 m long, 0.6 m dia-meter vehicle with high efficiency propulsion and batteries pro-viding 3.3 kW ) h of energy
has a substantial impact on one of the fundamentaltrade-offs in vehicle design, which is the trade-offbetween speed and range. In simplest terms, as hotelpower consumption increases, the vehicle speed forbest range also increases. This is illustrated for anexisting AUV in Figure 2.
A growing number of battery technologies areavailable, with speciRc energies (energy per batteryweight) ranging over more than an order of magni-tude. Lead}acid cells are the lowest energy speciRcenergy, roughly 30 W ) h kg�1, but are inexpensive,easy to use, and can be recharged many times.Other commercially available batteries include thosebased on silver}zinc, lithium-ion, and lithium poly-mer chemistries. The Rrst has been extensively usedfor underwater vehicles, providing energy densitiesmore than three times lead}acid batteries, whereasthe latter two are battery chemistries that are onlyrecently available and are just beginning to beemployed for AUVs. Primary cells are occasionallyused, for example alkaline manganese-dioxide D-cells are used to power at least one vehicle, andcertain lithium primary batteries offer the highestspeciRc energy of the readily available energysources with speciRc energies roughly ten times
those of lead}acid. Fuel cells and semifuel cells arealso being developed for and used on AUVs, andoffer the potential for both high energy capacity andpower delivery.
Future Prospects
The overview of AUVs and AUV technology pro-vided here has been necessarily brief. Among thetopics neglected are a variety of exciting technolo-gical developments that are experimental at the timeof this writing, but likely to be of interest to thereader. These include advances in navigation, map-ping sonar, energy storage, and propulsion systemsto name a few. The recent emergence of signiRcantmarkets in both commercial and military arenas hasled to increased activity in areas spanning researchto manufacture and operation of AUVs. This in turnis fostering a signiRcant development effort on thepart of component suppliers to customize theirproduct line to better support AUVs. The result isa rapid expansion in AUV capabilities, which willlikely continue for some time.
See also
Deep Submergence, Science of. Manned Sub-mersibles, Deep Water. Manned Submersibles,Shallow Water. Remotely Operated Vehicles(ROVs). Sonar Systems. Towed Vehicles.
Further ReadingBellingham JG, Goudey C, Consi TR and Chryssostomidis
C (1992) A small long range vehicle for deep oceanexploration. Proceedings Intern. Offshore and PolarEngineering Conf., San Francisco, 151}159.
Curtin TB, Bellingham JG, Catipovic J and WebbD (1993) Autonomous Oceanographic SamplingNetworks. Oceanography 6(3): 86}94.
Walton JM, (1991) Advanced unmanned search system.Proceedings, Oceans 91: 1392}1399.
216 AUTONOMOUS UNDERWATER VEHICLES (AUVs)