dynamo dynamic, data-driven character control with adjustable balance pawel wrotek electronic arts...
Post on 21-Dec-2015
219 views
TRANSCRIPT

Dynamo Dynamic, Data-driven Character Control with Adjustable Balance
Pawel Wrotek Electronic Arts
Chad Jenkins Brown University
Morgan McGuire Williams College

First, a video…First, a video…

Character MotionCharacter Motion
• An integral part of modern video gamesFIFA 2006 (EA)
San Andreas (Rockstar)
Antigrav (Harmonix)

Kinematic Character MotionKinematic Character Motion
• Expressed by rigid body kinematics
– Rigid bodies connected by joints
– Character pose defined by rotation
of joints
– Vector θ(t) represents pose
at a given instant of time

Motion Generation:Motion Generation:Mocap and KeyframingMocap and Keyframing
• (+) path of least resistance
• (+) absolute control “wyciwyg”
• (-) not physically dynamic
– static and partial snapshot of the dynamics occurred at the time of creation
• Production animation, not interactive games
God of War 2 (Sony)

Motion Generation:Motion Generation:Procedural AnimationProcedural Animation
• Rules/algorithms to automatically generate motion
• Three categories of approaches:
– Indirectly emulate physical plausibility
• [Perlin,Goldberg 94] [Popovic, Witkin 99] [Kovar et al. 02]
– Simulate physics only when necessary
• [Shapiro et al. 03] [Zordan et al. 05]
– Simulate physics directly and persistently
• [Hodgins et al. 95] [Laszlo et al. 00]

Procedural AnimationProcedural Animation
• Indirectly emulate physical plausibility
– Scripting [Perlin,Goldberg 94]
– Blending [Rose et al. 98]
– Optimization [Liu et al. 05] [Arikan et al. 03]
(+) creators retain control
Creators define all rules for movement
(-) violates the “checks and balances” of motion
Motion control abuses its power over physics
(-) limits emergent behavior

Procedural AnimationProcedural Animation
• Simulate physics directly
– Ragdolls
– Controllers to generate motor forces
[Zordan, Hodgins 02] [Faloutsos et al. 01][Popovic et al. 00]
– (+) proper “separation of powers”
• Physics, control, AI
• Allows for emergent, natural interactions
– (-) inherit problems that plague robotics
PhysicsController
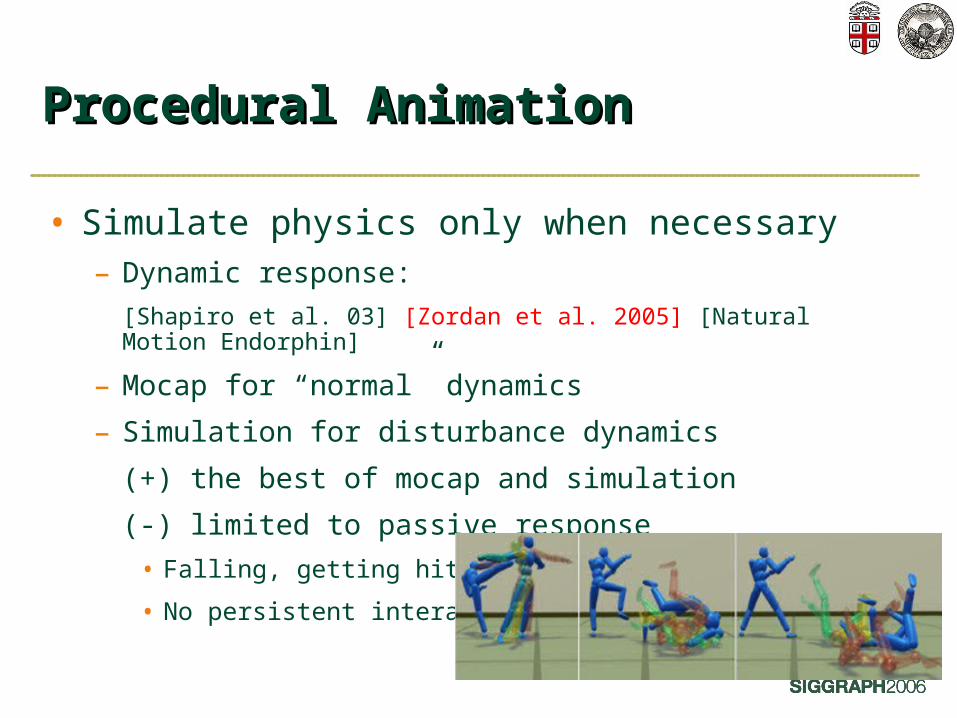
Procedural AnimationProcedural Animation
• Simulate physics only when necessary– Dynamic response:
[Shapiro et al. 03] [Zordan et al. 2005] [Natural Motion Endorphin]
– Mocap for “normal” dynamics
– Simulation for disturbance dynamics
(+) the best of mocap and simulation
(-) limited to passive response
• Falling, getting hit, etc.
• No persistent interaction

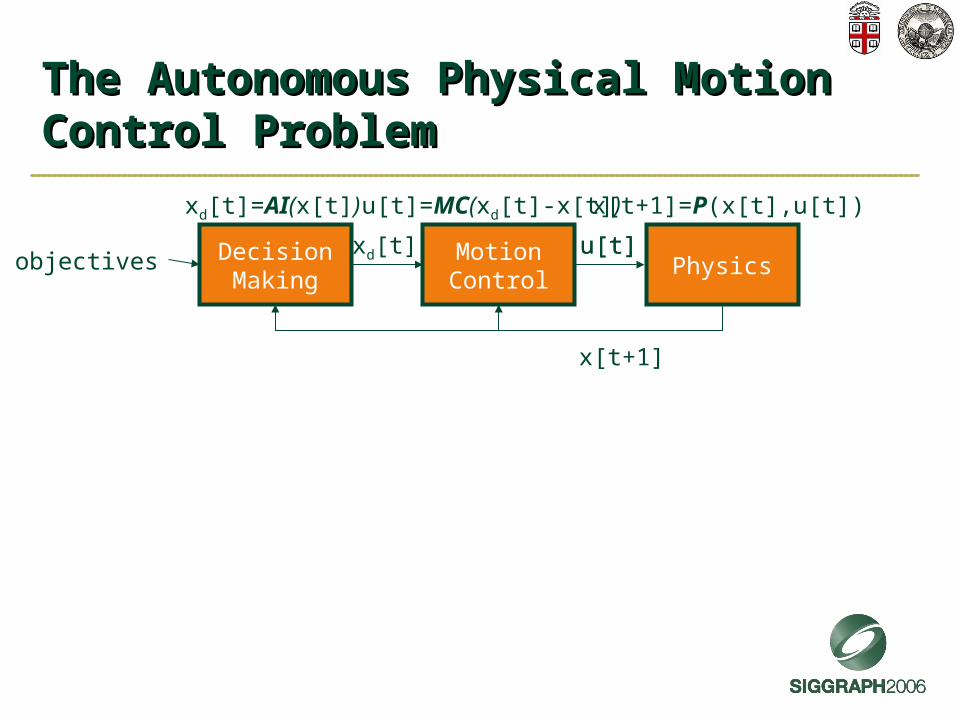
Fundamental QuestionFundamental Question
• Can we have practical methods for physically simulated characters?
• Revisit the broader picture for autonomous control
– Decision making (AI): objectives, current state (x[t]) → desired motion (xd[t])
– Motion Control: desired motion (xd[t]), current state (x[t]) → motor forces (u[t])
– Physics: current state (x[t]) → next state (x[t+1])
PhysicsMotionControl
DecisionMaking
objectives
x[t+1]
u[t]xd[t]
u[t]=MC(xd[t]-x[t]) x[t+1]=P(x[t],u[t])xd[t]=AI(x[t])
The Autonomous Physical Motion The Autonomous Physical Motion Control ProblemControl Problem
MotionControl
DecisionMaking
objectives
x[t+1]
u[t]xd[t]
u[t]=MC(xd[t]-x[t])xd[t]=AI(x[t])
Physicsu[t]
x[t+1]=P(x[t],u[t])
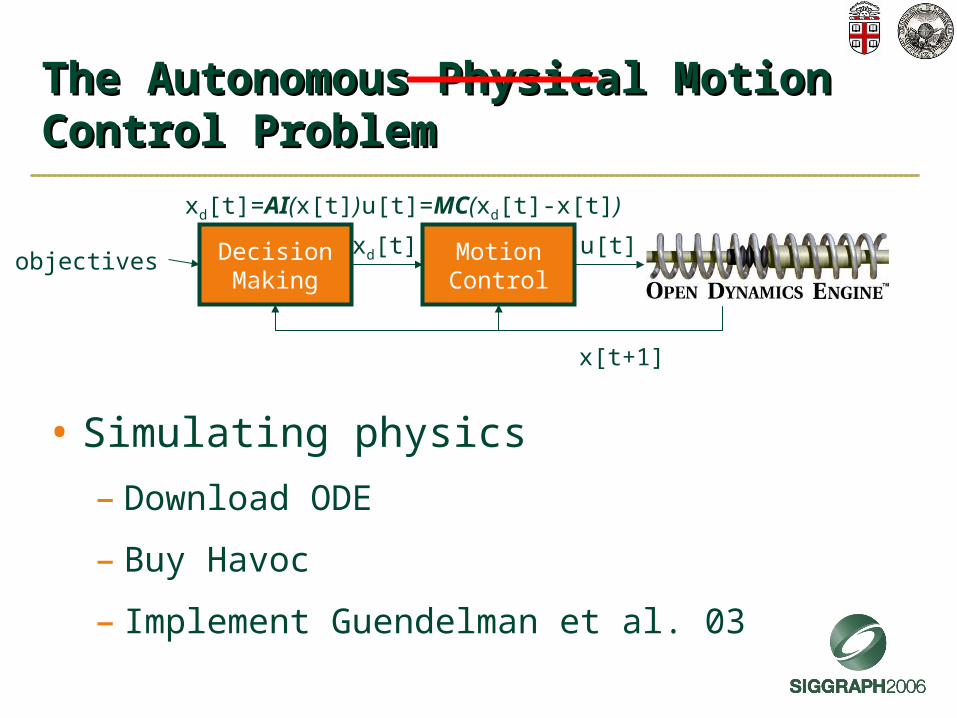
The Autonomous Physical Motion The Autonomous Physical Motion Control ProblemControl Problem
• Simulating physics
– Download ODE
– Buy Havoc
– Implement Guendelman et al. 03
MotionControl
DecisionMaking
objectives
x[t+1]
u[t]xd[t]
u[t]=MC(xd[t]-x[t])xd[t]=AI(x[t])

The Autonomous Motion Control The Autonomous Motion Control ProblemProblem
• AI for autonomous decision making
– Someone else’s problem
– Interface point for decision making
– Focus on motion control
• Motion capture as decision making placeholder
MotionControl
x[t+1]
u[t]xd[t]
u[t]=MC(xd[t]-x[t])
Mocapdata

Motion Control: ImpedimentsMotion Control: Impediments
• Gain tuning for motion control
• Balance for upright motion
MotionControl
x[t+1]
u[t]xd[t]
u[t]=MC(xd[t]-x[t])
Mocapdata

Motion Control: ImpedimentsMotion Control: Impediments
• Gain tuning for motion control
• Balance for upright motion
MotionControl
x[t+1]
u[t]xd[t]
u[t]=MC(xd[t]-x[t])
Mocapdata
Problem: parent space control?

Motion Control: ImpedimentsMotion Control: Impediments
• Gain tuning for motion control
• Balance for upright motion
MotionControl
x[t+1]
u[t]xd[t]
u[t]=MC(xd[t]-x[t])
Mocapdata
Problem: parent space control?Solution: world space control?

Segway Analogy Segway Analogy

Segway Analogy Segway Analogy

Segway Analogy Segway Analogy

• Parent PD-servo
– Torque u about an axis
• Appropriate kp and kd values
are necessary for stable control
– Tedious and difficult
– Holdover from robot rotational sensing
Feedback Motion ControlFeedback Motion Control
u
u[t]=kp(θd[t] - θ[t]) + kd(θd[t] - θ[t])..
D. Brogan

World Space PD-ServoWorld Space PD-Servo
• τ = kp (v · θ) + kd (ωd – ωa)Wd = desired world space rotation matrix
Wa = actual world space rotation matrix
T = Wd * Wa-1
(transformation from Wa to Wd)
v, θ = rotation axis, angle derived from T
ωd = desired world space angular velocity
ωa = actual world space angular velocity
Wd
Wa
v
θ
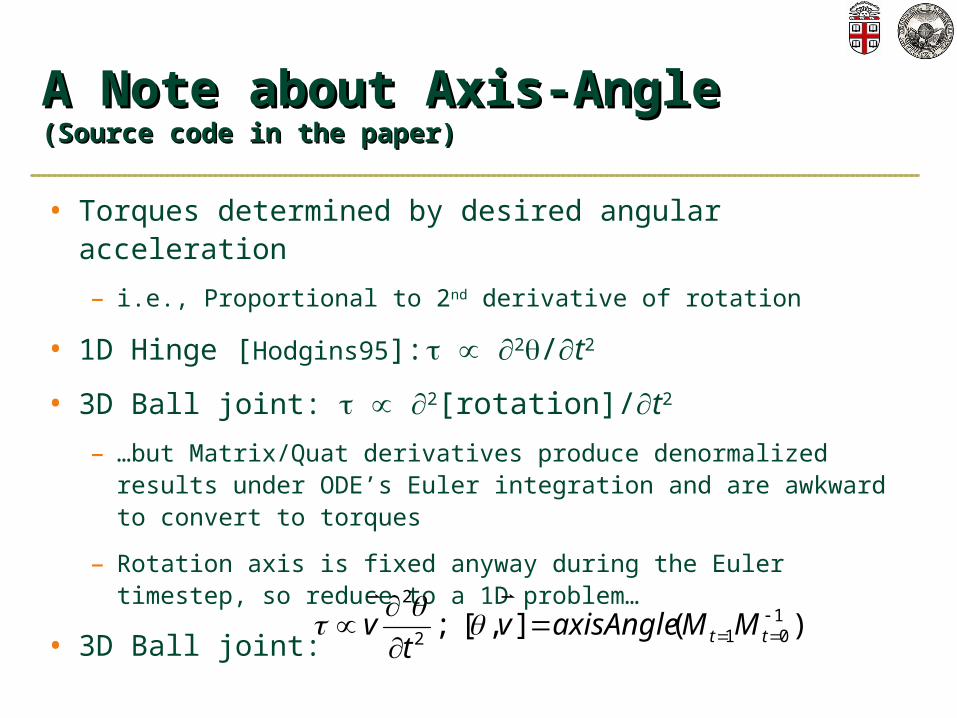
A Note about Axis-AngleA Note about Axis-Angle(Source code in the paper)(Source code in the paper)
• Torques determined by desired angular acceleration
– i.e., Proportional to 2nd derivative of rotation
• 1D Hinge [Hodgins95]: 2/t2
• 3D Ball joint: 2[rotation]/t2
– …but Matrix/Quat derivatives produce denormalized results under ODE’s Euler integration and are awkward to convert to torques
– Rotation axis is fixed anyway during the Euler timestep, so reduce to a 1D problem…
• 3D Ball joint: )(],[ ; 1012
2
tt MMaxisAnglevt
v

Early ResultsEarly Results
• Gain Tuning
• Cartwheel with object
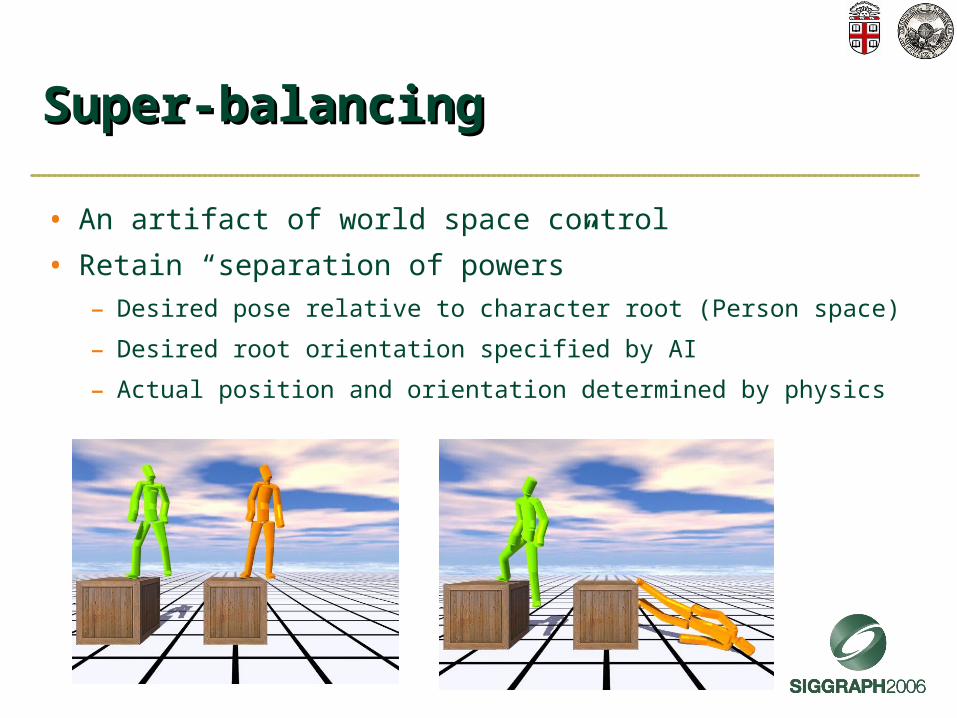
Super-balancingSuper-balancing
• An artifact of world space control
• Retain “separation of powers”
– Desired pose relative to character root (Person space)
– Desired root orientation specified by AI
– Actual position and orientation determined by physics
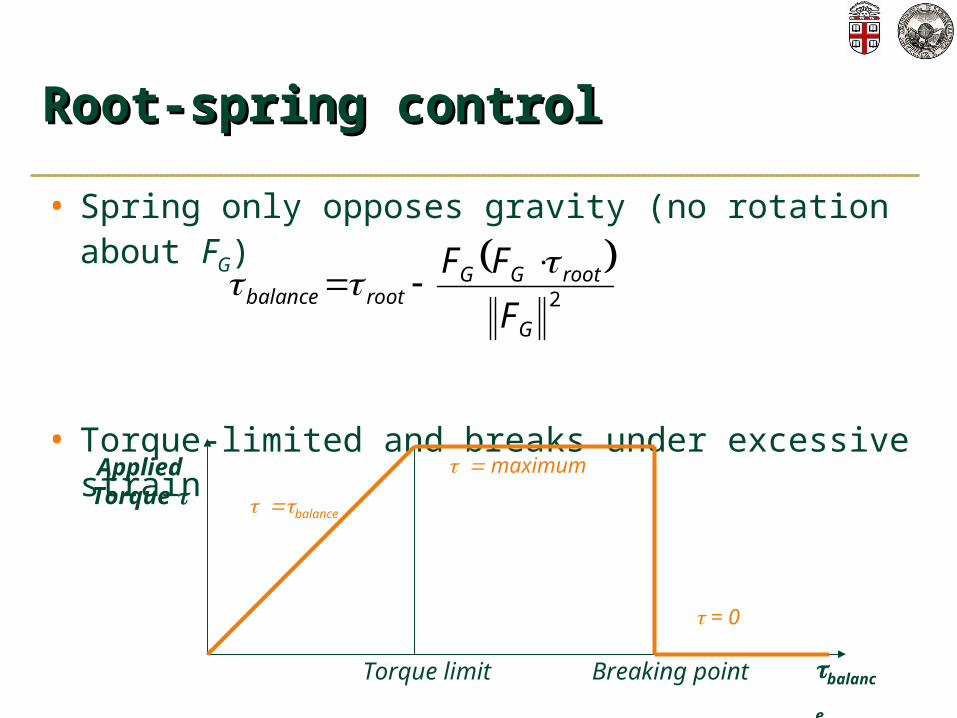
Root-spring controlRoot-spring control
• Spring only opposes gravity (no rotation about FG)
• Torque-limited and breaks under excessive strain
2
G
rootGGrootbalance
F
FF
balanceTorque limit Breaking point
balance
maximum
= 0
Applied Torque

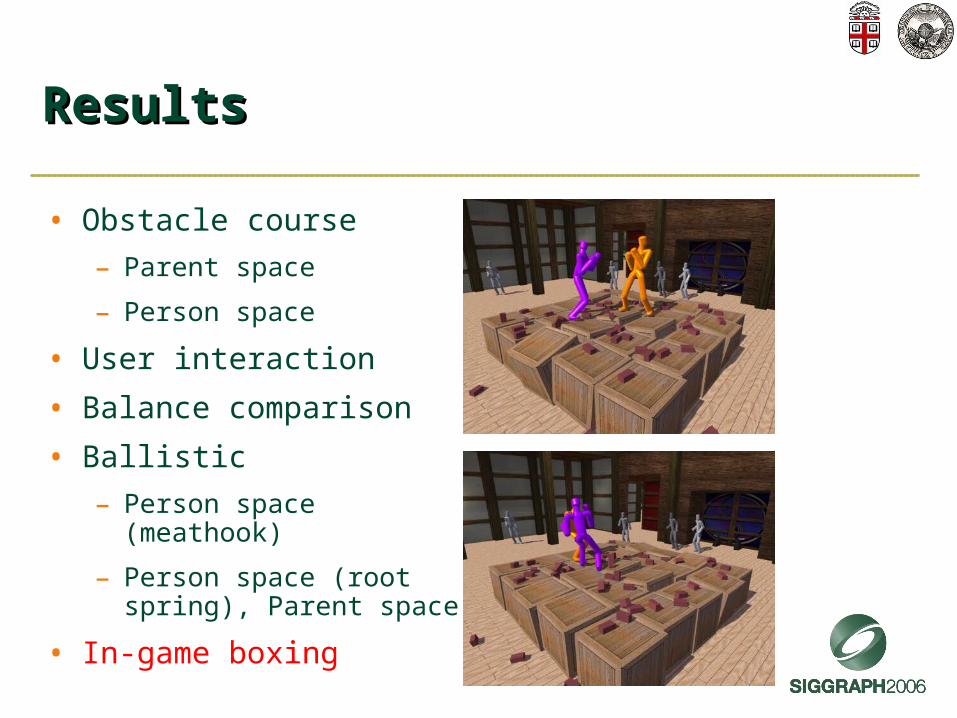
ResultsResults
• Obstacle course
– Parent space
– Person space
• User interaction
• Balance comparison
• Ballistic
– Person space (meathook)
– Person space (root spring), Parent space
• In-game boxing
Parent space
Dynamo

ResultsResults
• Obstacle course
– Parent space
– Person space
• User interaction
• Balance comparison
• Ballistic
– Person space (meathook)
– Person space (root spring), Parent space
• In-game boxing

ResultsResults
• Obstacle course
– Parent space
– Person space
• User interaction
• Balance comparison
• Ballistic
– Person space (meathook)
– Person space (root spring), Parent space
• In-game boxing

ResultsResults
• Obstacle course
– Parent space
– Person space
• User interaction
• Balance comparison
• Ballistic
– Person space (meathook)
– Person space (root spring), Parent space
• In-game boxing
ResultsResults
• Obstacle course
– Parent space
– Person space
• User interaction
• Balance comparison
• Ballistic
– Person space (meathook)
– Person space (root spring), Parent space
• In-game boxing

Future WorkFuture Work
• AI for goal-oriented motion generation
• Experimental parent vs. world analysis
• Biomechanical character constraints
• Embodied perception

ConclusionConclusion
• Physically dynamic characters are practical
• World-space control yields
– Implicit character balance
– Easier gain tuning
• Path to emergent behavior for interactive characters

AcknowledgementsAcknowledgements
• NSF Award IIS-0534858
• Dan Byers
• Sam Howell
• mocap.cs.cmu.edu
• G3D and ODE user communities
• “Innovating Game Development”
Guest Lecturers
• A-Lab
