differentialformen auf mannigfaltigkeiten, integration von ...lschwach/ws07/kaehler-seminar/... ·...
TRANSCRIPT
Seminar uber Kahlermannigfaltigkeitenim Wintersemester 2007/2008
Thema:
Differentialformen auf
Mannigfaltigkeiten, Integration von
Differentialformen,
Satz von Stokes fur
Mannigfaltigkeiten,
de Rham- Kohomologie
von
Manuel Jaraczewski
Inhaltsverzeichnis
1 Einleitung 1
2 Differentialformen 1
2.1 Multilineare Algebra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2.2 Differentialformen auf Mannigfaltigkeiten . . . . . . . . . . . . . . . . . . . 6
2.3 Der Satz von Stokes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.4 Geschlossene und exakte Formen . . . . . . . . . . . . . . . . . . . . . . . 21
3 De Rham Kohomologien 23
3.1 Die de Rham Gruppen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4 Literaturverzeichnis 28
- 2 -

1 Einleitung
Diese Ausarbeitung entstand im Rahmen eines Seminars uber Kahlermannigfaltigkeiten
unter der Leitung von Prof. Dr. L. Schwachhofer im Wintersemester 2007/2008. Die
Themen lauten:”Differentialformen auf Mannigfaltigkeiten, Integration von Differential-
formen, Satz von Stokes fur Mannigfaltigkeiten, de Rham- Kohomologie“.
Speziell werden wir hier die Gundlagen der multilinearen Algebra bereitstellen, um Diffe-
rentialformen einfuhren zu konnen. Danach werden die Differentialformen auf Mannigfal-
tigkeiten besprochen. Nach einer kurzen Einfuhrung uber Integrieren von Formen werden
wir den Integralsatz von Stokes kennen lernen.
Das Poincare- Lemma motiviert schließlich die Einfuhrung der de Rham Kohomolo-
giegruppen, welche es erlauben, topologische Eigenschaften von Mannigfaltigkeiten mit
Mitteln der Analysis zu bestimmen.
2 Differentialformen
2.1 Multilineare Algebra
Zunachst werden wir einige Aspekte der multilinearen Algebra betrachten. Dabei definieren
wir die alternierenden k- Formen auf endlich- dimensionalen Vektorraumen V . Weiterhin
wird das Dachprodukt ∧ zwischen Differentialformen eingefuhrt, welches die Menge der k-
Formen auf V , ΛkV ∗, zur einer Algebra erweitert. Mit Hilfe des Dachprodukts konnen wir
dann eine Basis von ΛkV ∗ angeben.
Im Folgenden sei V ein n- dimensionaler R- Vektorraum.
Definition 2.1 Eine Abbildung α : V k −→ R heißt multilinear, wenn gilt:
α(x1, ..., c · xi, ..., xn) = c · α(x1, ..., xi, ..., xn), (c ∈ R)
α(x1, ..., xi + yi, ..., xn) = α(x1, ..., xi, ..., xn) + α(x1, ..., yi, ..., xn).
Mit Hilfe der multilinearen Abbildung lassen sich nun Differentialformen auf Rn einfuhren:
- 1 -

Definition 2.2 Eine alternierende k- Form auf V ist eine multilineare Abbildung α :
V k −→ R mit der Eigenschaft, dass α(v1, ..., vk) = 0 fur beliebige linear abhangige Vekto-
ren v1, ..., vk ∈ V .
Die Menge aller alternierenden k- Formen auf V wird mit ΛkV ∗ bezeichnet. ΛkV ∗ wird
mit der punktweisen Addition und der Skalarmultiplikation als Verknupfungen zu einem
R- Vektorraum.
In dieser Definition ist von alternierenden Formen die Rede. Wir suchen ein Maß fur
Mannigfaltigkeiten der Dimension k > 1, das unabhangig von der Parametrisierung ist
(Volumenberechnung). Die Determinante det(v1, ..., vn) einer Matrix bestehend aus n li-
near unabhangigen Spaltenvektoren v1, ..., vn ∈ Rn misst das Volumen des von den vi
aufgespannten Parallelepipeds. det soll eine n- Form auf Rn sein, so dass diese Definition
die Determinanten verallgemeinert.
Zu einem Vektorraum V uber einem Korper K bezeichnen wir mit V ∗ den zu V gehorigen
Dualraum, also die Menge aller linearen Abbildungen von V nach K. Die Elemente von
V ∗ heißen kovariante Vektoren oder kurz Kovektoren.
Aus der Definition folgt Λ0V ∗ := R. Die alternierenden 1- Formen auf V sind gerade die
Linearformen α : V −→ R, also ist Λ1V ∗ = V ∗.
Satz 2.3 Fur jede multilineare Abbildung α : V k −→ R sind die folgenden Aussagen
aquivalent:
1. α ∈ ΛkV ∗
2. α(v1, ..., vk) = 0, falls vi = vj ∈ V mit i 6= j
3. α(v1, ..., vi, ..., vj, ..., vk) = −α(v1, ..., vj, ..., vi, ..., vk) (α ist alternierend)
4. Fur jede Permutation σ : 1, ..., k −→ 1, ..., k ist
α(vσ(1), ..., vσ(k)) = sign(σ) · α(v1, ..., vk).
Beweis:”1. =⇒ 2.“ α ∈ ΛkV ∗ ⇐⇒ α(v1, ..., vk) = 0 fur linear abhangige Vektoren. Da
zwei identische Vektoren insbesondere linear abhangig sind, folgt 2.
- 2 -

”2. =⇒ 1.“ Seien v1, ..., vk linear abhangig. Dann ist ein Vektor vi (1 ≤ i ≤ k) als Li-
nearkombination der ubrigen darstellbar. Damit ist α(v1, ..., vk) eine Summe aus k − 1
Summanden, die, unter der Vorausserzung von 2., alle samt verschwinden.
”2. =⇒ 3.“ Die Gultigkeit von 3. folgt wegen der Linearitat
α(v1, ..., vi + vj, ..., vi + vj, ..., vk) = 0 =⇒
α(v1, ..., vi, ..., vi, ..., vk)︸ ︷︷ ︸=0
+α(v1, ..., vi, ..., vj, ..., vk)+
α(v1, ..., vj, ..., vi, ..., vk) + α(v1, ..., vj, ..., vj, ..., vk)︸ ︷︷ ︸=0
= 0 =⇒
α(v1, ..., vi, ..., vj, ...,k ) + α(v1, ..., vj, ..., vi, ..., vk) = 0,
also Aussage 3.
”3. =⇒ 2.“
3.vi=vj=⇒ α(v1, ..., vi, ..., vi, ..., vk) = −α(v1, ..., vi, ..., vi, ..., vk),
also muss α(v1, ..., vi, ..., vi, ..., vk) = 0 gelten.
”3.⇐⇒ 4.“ Da jede Permutation Hintereinanderausfuhrung von Transpositionen ist, folgt
dies durch mehrfaches anwenden von 3..
Wir konnen nun eine Verknupfung zwischen alternierenden Formen einfuhren:
Definition 2.4 Sei α ∈ ΛkV ∗ eine k- Form und β ∈ Λ`V ∗ eine `- Form. Das Dachprodukt
zwischen α ∈ ΛkV ∗ und β ∈ Λ`V ∗ ist definiert als
∧ : ΛkV ∗ × Λ`V ∗ −→ Λk+`V ∗
(α ∧ β)(v1, ..., vk+`) :=1
k! · `!·∑
σ∈Sk+`
sign(σ) · α(vσ(1), ..., vσ(k)) · β(vσ(k+1), ..., vσ(k+`)),
wobei Sk+` die volle symmetrische Gruppe der Ordnung k + ` ist.
Ist f eine 0- Form und α eine k- Form, dann vereinfacht sich das Dachprodukt zum
gewohnlichen Skalarprodukt f ∧ α := f · α.
Satz 2.5 Fur alle α ∈ Λk(Rn), β ∈ Λ`(Rn), γ ∈ Λm(Rn) gilt:
1. ∧ : Λk(Rn)× Λ`(Rn) −→ Λk+`(Rn) ist bilinear, das heißt fur λ, µ ∈ R gilt
α ∧ (λ · β1 + µ · β2) = λ · (α ∧ β1) + µ · (α ∧ β2),
(λ · α1 + µ · α2) ∧ β = λ · (α1 ∧ β) + µ · (α2 ∧ β).
- 3 -

2. ∧ ist assoziativ, das heißt
(α ∧ β) ∧ γ = α ∧ (β ∧ γ).
3. Es gilt α ∧ β = (−1)k·` · β ∧ α
Beweis: Folgt aus der Definition und Nachrechnen.
Beispiel 2.6
Wir bilden das Dachprodukt aus k 1- Formen:
Sei α1, ..., αk ∈ Λ1V ∗ = V ∗. Setzt man als αi in die Definition ein, so entsteht nach
Umordnen der Summanden
(α1 ∧ ... ∧ αk)(v1, ..., vk)Def.=∑σ∈Sk
sign(σ) · α1(vσ(1)) · ... · αk(vσ(k))(∗)= det(αi(vj)1≤i,j≤k). (1)
Bei (∗) verwenden wir die Leibnizsche Determinantenformel.
Uber die Determinante kann man also aus k 1- Formen eine k- Form definieren.
Wir wollen eine Basis von ΛkV ∗ finden. Wahle dazu ein Paar dualer Basen e1, ..., en von
V und e∗1, ..., e∗n von V ∗, das heißt es gilt
e∗i (ej) = δij.
Satz 2.7 Die Menge e∗i1 ∧ ... ∧ e∗ik fur 1 ≤ i1 < ... < ik ≤ n bildet eine Basis von ΛkV ∗.
Insbesondere ist also
dim(ΛkV ∗) =
(n
k
), fur k ≤ n
0 , fur k > n.
Beweis: Fur 1 ≤ j1 < ... < jk ≤ n gilt
(e∗i1 ∧ ... ∧ e∗ik
)(ej1 , ..., ejk)
(1)= det(e∗iµ(ejν ))1≤µ,ν≤k
= det(δiµjν )1≤µ,ν≤k
=
1 , (i1, ..., ik) = (j1, ..., jk)
0 , (i1, ..., ik) 6= (j1, ..., jk).
- 4 -

Damit sind e∗i1 ∧ ... ∧ e∗ik
mit 0 < i1 < ... < ik ≤ n linear unabhangig und durch Linear-
kombination kann man auf allen (ej1 , ..., ejk) beliebig vorgegebene Werte erzielen. Also ist
e∗i1 ∧ ... ∧ e∗ik ein linear unabhangiges Erzeugendensystem in ΛkV ∗.
Mit Hilfe der Basis lasst sich nun jede k- Form α ∈ ΛkV ∗ schreiben als
α =∑
i1<...<ik
ai1,...,ik · e∗i1 ∧ ... ∧ e∗ik
.
Nun definieren wir den pull- back:
Definition 2.8 Seien V und W Vektorraume und f : V −→ W eine lineare Abbildung.
Fur α ∈ ΛkW ∗ heißt die durch
f ∗ : ΛkW ∗ −→ ΛkV ∗,
(f ∗α)(v1, ..., vk) := α(f(v1), ..., f(vk))
definierte k- Form die unter f zuruckgezogene k- Form / der pull- back von α unter f .
Fur k = 0 setzen wir f ∗α := α f .
Beispiel 2.9
Sei V ein n- dimensionaler Vektorraum und f : V −→ V ein Endomorphismus. Dann
ist dim(ΛnV ∗) = 1 und f ∗ : ΛnV −→ ΛnV eine lineare Abbildung. f ∗ entspricht der
Multiplikation mit det(f).
Satz 2.10 Der pull- back hat folgenden Eigenschaften:
1. f ∗ : ΛkW ∗ −→ ΛkV ∗ ist linear:
f ∗(λ · α+ µ · β) = λ · f ∗α+ µ · f ∗β, λ, µ ∈ R, α, β ∈ ΛkW ∗
2. f ∗(α ∧ β) = (f ∗α) ∧ (f ∗β) fur alle α ∈ ΛkW ∗ und β ∈ Λ`W ∗.
Beweis: Folgt durch Einsetzen in die Definition.
- 5 -

2.2 Differentialformen auf Mannigfaltigkeiten
Bis jetzt hatten wir Differentialformen lediglich auf endlich- dimensionalen Vektorraumen
definiert. Differentialformen auf Mannigfaltigkeiten M definieren wir nun punktweise.
Sei p ∈M und
Tp(M) := v | v ist Tangentialvektor in p
der Tangentialraum und T ∗pM der zu Tp(M) duale Raum. Sei weiter
TM :=•⋃
p∈M
TpM
das Tangentialbundel und entsprechend T ∗M =•⋃
p∈M
T ∗pM .
In diesem Fall ist ΛkT ∗M :=•⋃
p∈M
ΛkT ∗pM . Im Falle k = 0 ist Λ0T ∗M = M × R und fur
k = 1 erhalt man Λ1T ∗M = T ∗M .
Definition 2.11 Eine Differentialform ω vom Grad k auf einer Mannigfaltigkeit ist eine
Abbildung ω : M −→ ΛkT ∗M , mit
1. ωp ∈ ΛkT ∗pM fur alle p
2. fur alle X1, ..., Xk ∈ X(M) := Vektorfelder auf M ist die Abbildung
p 7→ ωp ((X1)p, ..., (Xk)p)
glatt.
Der Vektorraum der Differentialformen auf M wird mit Ωk(M) bezeichnet. Insbesonde-
re ist damit Ω0(M) = C∞(M) der Vektorraum der auf M beliebig oft differenzierbaren
Funktionen.
Vermoge Definition (2.4) erklaren wir nun das Dachprodukt zweier Differentialformen
punkweise:
Definition 2.12 Sei α ∈ Ωk(M) und β ∈ Ω`(M). Dann ist
∧ : Ωk(M)× Ω`(M) −→ Ωk+`(M)
(α ∧ β)p := αp ∧ βp
das Dachprodukt von α und β.
- 6 -

Es gelten erneut die Eigenschaften des Satzes (2.5).
Bemerkung:
Vermoge des Dachprodukts wird
Ω∗(M) :=∞⊕
k=0
Ωk(M)
zu einer antikommutativen graduierten Algebra mit Einselement.
Definition 2.13 Sei f : M −→ N differenzierbar. Die durch
f ∗ : Ωk(N) −→ Ωk(M)
(f ∗α)p(v1, ..., vk) := α(dff(p)(v1), ..., df(vk)), v1, ..., vk ∈ TpM(2)
definierte k- Form ist die unter f zuruckgezogene k- Form / der pull- back von α unter f .
Fur k = 0 setzen wir erneut f ∗α := α f .
M
f ( )f x
M
f ( )f xx
NxT M NxT M
αf α∗
RR
Analog zum Satz (2.10) gilt fur den pull- back in Gleichung (2) der folgende Satz.
Satz 2.14 Fur den pull- back gilt:
1. f ∗ : Ωk(N) −→ Ωk(M) ist linear, das heißt
f ∗(λ · α+ µ · β) = λ · f ∗α+ µ · f ∗β, λ, µ ∈ C∞(M), α, β ∈ Ωk(N)
2. f ∗(α ∧ β) = (f ∗α) ∧ (f ∗β) fur alle α ∈ Ωk(N) und β ∈ Ω`(N).
Eine weitere Eigenschaft nennt der folgende Satz.
- 7 -

Satz 2.15 Fur f ∈ C∞(M,N) und g ∈ C∞(N,P ) genugt der pull- back der Kettenregel
(g f)∗ = f ∗ g∗.
Beweis:
(g f)∗(α)(v1, ..., vk) = α(d(g f)(v1), ..., d(g f)(vk))
= α(dg(df(v1)), ..., dg(df(vk)))
= (g∗α)(df(v1), ..., df(vk))
= f ∗(g∗(α))(v1, ..., vk).
Sei M eine n- dimensionale Mannigfaltigkeit, p ∈M und f ∈ C∞(M,R).
Wir definieren
(dfp)vp := vp(f) fur vp ∈ TpM,
wobei vp(f) die Richtungsableitung von f in p in Richtung v ist. Dann heißt die durch
p 7−→ dfp ∈ T ∗pM = Λ1TpM gegebene differenzierbare 1- Form df ∈ Ω1M Differential von
f . An der Stelle p ist es gegeben durch
dfp : TpM −→ Tf(p)R ∼= R
Wegen des kanonischen Isomorphimus R ∼= Tf(p)R fassen wir dfp als Element des Dualraums
T ∗pM auf.
In lokalen Koordinaten sind also die n Komponenten von df gegeben durch
df
(∂
∂xi
)=
∂
∂xi
f, i = 1, ..., n.
Insbesondere konnen wir fur eine Karte auf einer offenen Menge U die Differentiale dxi ∈
Ω1U der Koordinatnenfunktionen xi : M −→ R, xi(x1, ..., xn) 7−→ xi bilden:
dxi
(∂
∂xk
)=
∂
∂xk
xi = δik.
Damit bilden die Differentiale dxi, ..., dxn ∈ Ω1U der Koordinatenfunktionen einer Karte
fur alle p ∈ U die zu
∂
∂x1
, ...,∂
∂xn
duale Basis (dx1)p, ..., (dxn)p des T ∗
pM . Damit
- 8 -
konnen wir df also folgende Linearkombination schreiben:
df =n∑
i=1
∂f
∂xi
dxi.
Bezuglich der dualen Basis kann eine k- Form α in der Linearkombination
α|U =∑
i1<...<ik
ai1,...,ik dxi1 ∧ ... ∧ dxik
mit ai1,...,ik ∈ C∞(U) dargestellt werden.
Wir werden nun die außere Ableitung einer Differentialform einfuhren. Zuvor benotigen
wir jedoch noch ein technisches Lemma uber die Zerlegung der Eins:
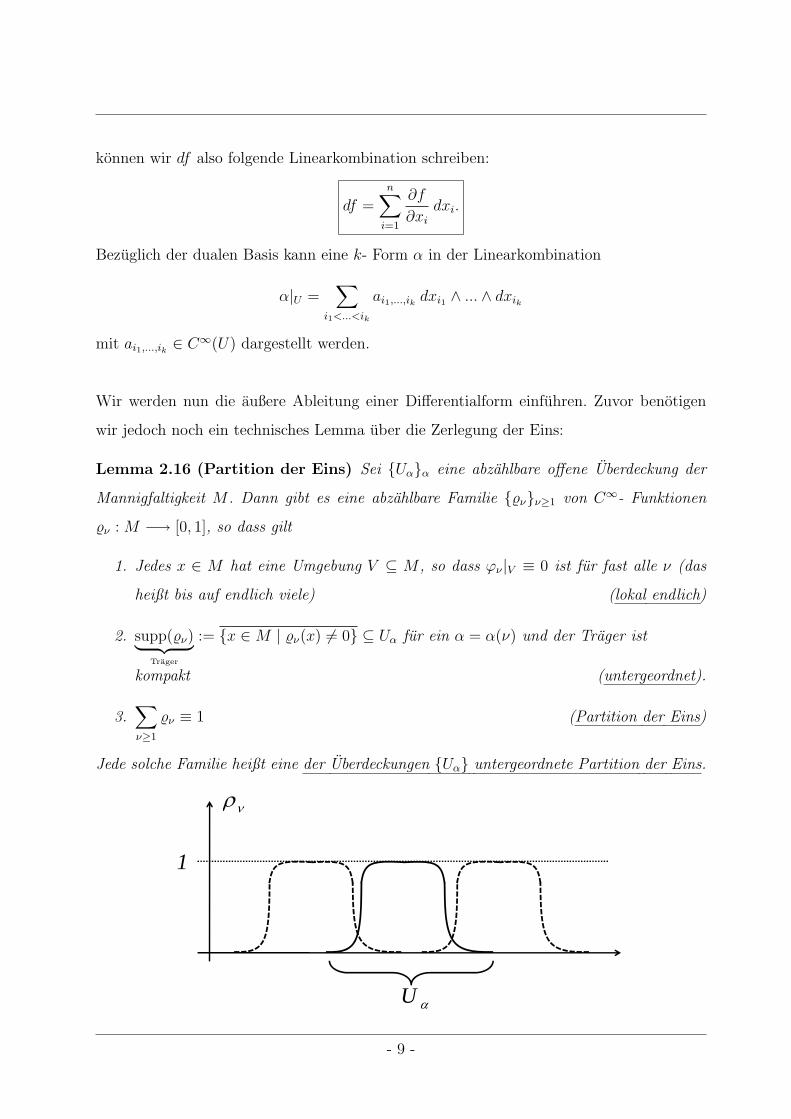
Lemma 2.16 (Partition der Eins) Sei Uαα eine abzahlbare offene Uberdeckung der
Mannigfaltigkeit M . Dann gibt es eine abzahlbare Familie %νν≥1 von C∞- Funktionen
%ν : M −→ [0, 1], so dass gilt
1. Jedes x ∈ M hat eine Umgebung V ⊆ M , so dass ϕν |V ≡ 0 ist fur fast alle ν (das
heißt bis auf endlich viele) (lokal endlich)
2. supp(%ν)︸ ︷︷ ︸Trager
:= x ∈M | %ν(x) 6= 0 ⊆ Uα fur ein α = α(ν) und der Trager ist
kompakt (untergeordnet).
3.∑ν≥1
%ν ≡ 1 (Partition der Eins)
Jede solche Familie heißt eine der Uberdeckungen Uα untergeordnete Partition der Eins.
νρ
11
U αα
- 9 -

Die Summe in 3. ist wohldefiniert, da nach 1. in jedem Punkt fast alle Summanden %ν
Null sind. Wegen der lokalen Endlichkeit liefert auch die Summe fur jeden Punkt einen
endlichen Wert. Die konstante Funktion f(x) ≡ 1 wird mittels 3. in Funktionen %ν zerlegt.
Bemerkung:
Eine Mannigfaltigkeit der Dimension n ist definiert als ein topologischer Hausdorff- Raum
mit folgenden Eigenschaften:
( )x Uα αβ ( )x Uβ βα
x xβxα
αβϕ
Uαβ
Uβα
β
αβ
1. Es existieren xα : Uα −→M , wobei Uα ⊆ Rn offen, so dass xα ein Homoomorphismus
ist, das heißt xα : Uα −→ xα(Uα) ist bijektiv, stetig und x−1α : xα(Uα) −→ Uα ist
stetig.
2. Es gilt M =⋃α
xα(Uα).
3. Sei Uαβ := x−1α (xβ(Uβ)) ⊆ Uα offen und Uβα := x−1
β (xα(Uα)) ⊆ Uβ offen. Dann ist
x−1β xα : Uαβ −→ Uβα ein Diffeomorphismus fur alle Koordinatenabbildungen α, β.
4. Es gibt eine abzahlbare Familie xαn : Uαn −→M von Koordinatenabbildungen mit
M =∞⋃
n=1
xαn(Uαn).
- 10 -

Nach Eigenschaft 4. existiert zu jeder offenen Uberdeckung von M eine untergeordnete
Partition der Eins. Damit konnen Funktionen auf Mannigfaltigkeiten in”Teilfunktionen“
zerlegt werden:
Beispiel 2.17
Sei f : M −→ R und ϕ−1α : Vα −→ Uα ein Atlas von M . Dann kann f mittels Partitio-
nierung der Eins in Funktionen ϕν · f zerlegt werden, deren Trager jeweils in einer Karte
Vα liegt:
f =∑
ν
(%ν · f).
Nach diesen Voruberlegungen kommen wir nun zur außeren Ableitung:
Satz 2.18 Es existiert genau eine Abbildung d : Ωk(M) −→ Ωk+1(M), so dass
1. d linear ist, das heißt es gilt
d(λ · α1 + µ · α2) = λ · dα1 + µ · dα2
fur α1, α2 ∈ Ωk(M) und λ, µ ∈ R,
2. d die Produktregel
d(α ∧ β) = (dα) ∧ β + (−1)k · α ∧ dβ ∀α ∈ Ωk(M), β ∈ Ω`(M) (3)
erfullt,
3. d eine Kettenabbildung ist, das heißt es gilt
d2 = d d = 0,
4. d im Falle k = 0 mit dem bereits definierten Differential ubereinstimmt.
Beweis: Sei d die zu konstruierende Abbildung.
1. Teil: Beweis fur ein Kartengebiet.
Sei α : U −→M ein Koordinatensystem. Jedes ω ∈ ΩkU hat die Darstellung
ω =∑
i1<...<ik
ai1,...,ikdxi1 ∧ ... ∧ dxik .
- 11 -

Definiere
dω =∑
i1<...<ik
d(ai1,...,ik) ∧ dxi1 ∧ ... ∧ dxik . (4)
Erfullt d die Eigenschaften 1. bis 4. auf U , so muss dω die Form (4) haben, da wegen
Eigenschaft 3. d(dxi) = 0 gilt und damit nach der Produktregel d(dxi1 ∧ ...∧ dxik) = 0 ist.
Fur die Existenz betrachten wir (4) und stellen fest, dass d linear ist und fur k = 0 das
Differential ergibt. Zum Nachweis der Produktregel seien ohne Einschrankung
ω = f dxi1 ∧ ... ∧ dxik und
η = g dxj1 ∧ ... ∧ dxj`.
Nach (4) ist dann
d(ω ∧ η) = d(f · g) ∧ dxi1 ∧ ... ∧ dxik ∧ dxj1 ∧ ... ∧ dxj`
Es gilt die herkommliche Produktregel d(f · g) = df · g + f · dg. Zusammen mit der
Antikommutativitat des Dachprodukts ergibt sich
d(ω ∧ η) = (df ∧ dxi1 ∧ ... ∧ dxik) ∧ (g dxj1 ∧ ... ∧ dxj`)
+(−1)k · (f dxi1 ∧ ... ∧ dxik) ∧ (dg ∧ dxj1 ∧ ... ∧ dxj`)
= (dω) ∧ η + (−1)k · ω ∧ dη.
Dies ist die gewunschte Eigenschaft in (3).
Zum Nachweis der Eigenschaft d2 = 0 fur alle ω ∈ ΩkU beschranken wir uns auf den Fall
k = 0 (nach der Definition in (4) reicht dies aus). Fur f ∈ Ω0U gilt
d(df) = d(df)
= d
(n∑
i=1
∂f
∂xi
dxi
)
=n∑
i=1
d
(∂f
∂xi
)∧ dxi
=n∑
i,j=1
∂2f
∂xi∂xj
dxj ∧ dxi
= 0,
- 12 -

wegen der Symmetrie von∂2f
∂xi∂xj
und der Antisymmetrie des Dachprodukts.
2. Teil: Beweis fur allgemeine Mannigfaltigkeiten
Fur die Existenz wahlen wir eine Partition der Eins, %ii≥1, zu einer Koordinatenuberdeckung
von Uα. Dann ist
d(α) = d
(∑ν≥1
%ν · α
)=∑ν≥1
dUα(%ν · α).
mit der in (4) definierten Abbildung dUα auf Uα. Durch nachrechnen verifiziert man, dass
die Abbildung d : Ωk(M) −→ Ωk+1(M) die Eigenschaften 1. bis 4. erfullt.
Fur die Eindeutigkeit sei d eine weitere außere Ableitung auf ganzM mit den Eigenschaften
1. bis 4.. Wir wahlen erneut %νν≥1 als Partition der Eins zu einer Uberdeckung von Ui.
Dann ergibt sich nach Ausnutzen der Linearitat
dα = d
(∑ν≥1
%ν · α
)=∑ν≥1
d(%ν · α).
Da fur supp(%ν ·α) ⊆ Uα(ν) nach Teil 1 die Gleichheit d(%ν ·α) = d(%ν ·α) folgt, ergibt sich
weiter
dα =∑ν≥1
d(%ν · α) =∑ν≥1
d(%ν · α) = d
(∑ν≥1
%ν · α
)= dα.
Die Abbildung in (4) heißt außere Ableitung.
Satz 2.19 Die außere Ableitung vertauscht mit dem pull- back (d ist naturlich), das heißt
es gilt
f ∗(dα) = d(f ∗α) (5)
fur α ∈ Ωk(N) und f : M −→ N differenzierbar (M,N : Mannigfaltigkeiten).
Beweis: Fur Funktionen g ∈ Ω0(M) ist mit 4. die Formel (5) nichts weiteres als die
Kettenregel:
(f ∗dg)x = (dg)f(x) dfx nach Definition von f ∗
= d(g f)x nach ublicher Kettenregel
= d(f ∗g)x nach Definition von f ∗. (6)
- 13 -

Also haben wir fur a ∈ Ω0(M) und α := da ∈ Ω1(M):
f ∗(dα) = f ∗(d2a)3.= 0,
d(f ∗α)(6)= d(df∗a) = d2(f ∗a)
3.= 0.
Jede Form ist Linearkombination von Dachprodukten von 0- Formen (Funktionen) und
exakten 1- Formen. Denn fur eine Partition der Eins ist
α =∑
i
(%i · α) mit %i · α =∑
ai1,...,ik dxi1 ∧ ... ∧ dxik .
Also sind %i · α als Linearkombination von 0- und 1- Formen darstellbar. Wegen dieser
Darstellungsmoglichkeit reicht es aus, folgende Implikationen zu zeigen:
f ∗dα = df∗α
f ∗dβ = df∗β
=⇒ f ∗d(α ∧ β) = df∗(α ∧ β).
Dies folgt aber wegen
f ∗d(α ∧ β)2.= f ∗(dα ∧ β + (−1)k · α ∧ dβ)
1.= f ∗dα ∧ f ∗β + (−1)k · f ∗α ∧ f ∗dβ
= df∗α ∧ f ∗β + (−1)k · f ∗α ∧ df∗β nach Voraussetzung
2.= d(f ∗α ∧ f ∗β)
1.= df∗(α ∧ β).
Die bisher betrachteten Differentialformen ω ∈ Ωk(M) waren alle R- wertig. Seien α, β ∈
Ωk(M). Definiere
ω := α+ i · β, ω := α− i · β.
Dies ist eine komplexe k- Form auf M . Den Vektorraum der komplexen k- Formen auf M
bezeichnen wir mit Ωk(M,C). Damit ist ω : M −→ Λk(R)⊕ i · Λk(R).
Fur ω ∈ Ωk(M,C) ist die außere Ableitung komponentenweise definiert:
dω = dα+ i · dβ, dω = dα− i · dβ.
ω ist stetig (bzw. differenzierbar, bzw. stetig differenzierbar,...) genau dann, wenn Re(ω) =
α und Im(ω) = β stetig (bzw. differenzierbar, bzw. stetig differenzierbar,...) sind.
- 14 -
2.3 Der Satz von Stokes
Der Satz von Stokes ist der zentrale Satz in der Theorie uber Integration auf Mannigfal-
tigkeiten.
Im Folgenden sollen die angegebenen Integrale stets existieren.
Betrachte zunachst α ∈ Ωnnn(X) mit X ⊆ Rnnn offen. Dann ist
α = a(X) dx1 ∧ ... ∧ dxn︸ ︷︷ ︸dV
mit a : X −→ R stetig.
Eine Orientierung auf einem Vektorraum V ist eine Aquivalenzklasse von Basen, wobei
zwei Basen aquivalent heißen, wenn die Determinante der Basiswechselmatrix positiv ist.
Eine Orientierung der Mannigfaltigkeit M ist eine Familie von Orientierungen der Tangen-
tialraume TpM , so dass fur alle p ∈ M eine Koordinatenabbildung ϕ : U −→ M existiert,
so dass die kanonische Basis∂
∂x1
(y), ...,∂
∂xn
(y) fur alle y ∈ U positiv orientiert ist. Eine
Koordinatenabbildung xα : Uα −→ M ist positiv (negativ) orientiert, falls die kanonische
Basis von TpM ,
∂
∂x1
, ...,∂
∂xn
, positiv (negativ) orientiert ist.
Ein Atlas heißt orientiert, wenn alle Koordinatenabbildungen positiv orientiert sind. In
diesem Fall hat die Jacobi- Matrix des Kartenwechsels uberall positive Determinante.
Wir definieren nun das Integral uber Formen:
Definition 2.20 Das (Lebesgue-) Integral von α ∈ Ωn(X) uber X ⊆ Rn ist gegeben
durch ∫X
a(x) dx1 ∧ ... ∧ dxn =
∫X
α :=
∫X
a dx1...dxn. (7)
- 15 -

Ist ϕ : Y → X mit ϕ(y1, ..., yn) := (x1, ..., xn) ein Diffeomorphismus und ω = a(x) dx1 ∧
... ∧ dxn eine n- Form auf X, so ist∫Y
ϕ∗(ω)(2.9)=
∫Y
a(ϕ(y)) · det(dϕ) dy1 ∧ ... ∧ dyn
(2.20)=
∫Y
a(ϕ(y)) · det(dϕ) dy1...dyn
= ±∫X
a(x) dx1...dxn (Transformationsformel)
Def.= ±
∫X
a(x) dx1 ∧ ... ∧ dxn
= ±∫X
ω, (8)
wobei”±“ das Vorzeichen von det(dϕ) ist.
Lokal sehen glatte n- dimensionale Mannigfaltigkeiten aus wie der Rn. Um nun einen
Ubergang vom Lokalen zu Globalen zu haben, verwenden wir die Zerlegung der Eins: Sei
nun M eine n- dimensionale orientierte Mannigfaltigkeit mit fest gewahlter Orientierung
[M ] und ω eine n- Form auf M . Die Orientierung der Mannigfaltigkeit ist notig, da das
Integral auf der rechten Seite von (7) nach dem Satz von Fubini beim Vertauschen der dxi
stets den gleichen Wert ergibt. Damit ist also die Definition in (7) wohldefiniert.
Sei ϕ−1α : Vα −→ Uα ein orientierter Atlas und %ν eine untergeordnete Partition der
Eins. Dann ist
ω =∑
ν
(%ν · ω). (9)
Hierbei ist %ν · ω eine n- Form auf M mit Trager in Vα(ν).
Sei nun M eine k- dimensionale Untermannigfaltigkeit einer k + m- dimensionalen Man-
nigfaltigkeit N .
Definition 2.21 Das Integral von ω ∈ Ωk(M) uber eine orientierte Untermannigfaltigkeit
N ⊆M der Dimension k ist definiert als∫N
ω :=∑
ν
∫Uα(ν)
(ϕα)∗(%ν · ω), (10)
- 16 -

mit den Koordinatenuberdeckungen ϕ : Uα −→ Vα und dem in (9) definierten ω.
Bemerkungen:
1. Eigentlich musste man∫
[N ]
ω schreiben.
2. Da die %ν · ω kompakten Trager haben, existieren die Integrale in (10).
3. Das so definierte Integral ist wohldefiniert, das heißt unabhangig von der Wahl des
orientierten Atlanten und der untergeordneten Partition der Eins.
Beweis: Nach Definition ist
∫M
ω :=∑
ν
∫Vα(ν)
ϕ−1α (%n · ω), wobei ϕ−1
α : Vα −→ Uα
ein orientierter Atlas und %ν eine untergeordnete Partition der Eins ist. Sei ϕ−1β :
Vβ −→ Uβ ein weiterer orientierter Atlas, ψαβ := ϕ−1β ϕα und %′η eine zweite
untergeordnete Partition der Eins. Dann ist∫M
ω :=∑
ν
∫Uα(ν)
(ϕα(ν))∗(%ν · ω) =
∑ν,η
∫Uα(ν)
(ϕα(ν))∗(%′η · %ν · ω)
=∑ν,η
∫Uα(ν)
ψ∗αβ(ϕ∗β(η)(%′η · %ν · ω))
(8)=
∑ν,η
∫Uβ(η)
ϕ∗β(%′η · %ν · ω) =∑
η
∫Vβ(η)
%′η · ω.
Hierbei verwenden wir die Inklusion supp(%η · %ν ·ω) ⊆ Vα(ν) ∩ Vβ(η), sowie die Trans-
formationsformel (8) fur ψαβ : ϕ−1β ϕα : Uα(ν) −→ Uβ(η).
Definition 2.22 Eine Mannigfaltigkeit mit Rand der Dimension n ist ein topologischer
Hausdorff- Raum, so dass folgendes gilt:
1. Es existieren xα : Uα −→ M , Uα ⊆ Rn+ := (x1, ..., xn) ∈ Rn | x1 ≥ 0 relativ offen,
so dass xα ein Homoomorphismus ist.
2. Es gilt M =⋃α
xα(Uα) und ∂M =⋃α
xα(Uα∩Rn−1), wobei Rn−1 = (x1, ..., xn) ∈ Rn |
x1 = 0 ist.
- 17 -

3. Fur Uαβ := x−1α (xβ(Uβ)) und Uβα := x−1
β (xα(Uα)) ⊆ Uβ offen ist x−1β xα : Uαβ −→
Uβα fur alle Koordinatenabbildungen α und β ein Diffeomorphismus.
4. Es existiert eine abzahlbare Familie xαn : Uαn −→ M von Koordinatenabbildungen
mit
M =∞⋃
n=1
xαn(Uαn).
Der Rand ∂M ist eine Mannigfaltigkeit der Dimension n − 1. Der Rand tragt die durch
die Mannigfaltigkeit induzierte Orientierung, die so definiert ist, dass v1, ..., vn−1 ∈ Tp∂M
positiv orientiert ist, falls
(− ∂
∂x1
, v1, ..., vn−1
)positiv orientiert in TpM ist.
Nach diesen Voruberlegungen konnen wir nun zu dem zentralen Satz:
Satz 2.23 (Satz von Stokes) Sei M eine orientierte n- dimensionale Mannigfaltigkeit
mit Rand. Sei ω eine (glatte) (n− 1)- Form auf M mit kompakten Trager. Dann gilt∫M
dω =
∫∂M
ω. (11)
Dabei trage ∂M die durch die n- dimensionale Untermannigfaltigkeit M induzierte Orien-
tierung.
ω auf der rechten Seite von (11) ist also ω|∂M zu interpretieren. Ist ∂M = ∅, dann ist∫∂M
ω = 0.
Beweis:
1. M = Rn und supp(ω) = x | ω(x) 6= 0 kompakt. Dann ist
ω =∑
i
ai dx1 ∧ ... ∧ dxi ∧ ... ∧ dxn (dxi bedeutet: wird weggelassen),
∂M = ∅. Es folgt
dω =∑
i
(−1)i−1 · ∂ai
∂xi
dx1 ∧ ... ∧ dxn,
- 18 -

und Fubini liefert∫Rn
dω =∑
i
(−1)i−1 ·∫Rn
∂ai
∂xi
dx1...dxn
=∑
i
(−1)i−1 ·∫
Rn−1
∞∫−∞
∂ai
∂xi
dxi
︸ ︷︷ ︸
=0
dx1...dxi...dxn
= 0,
da supp(ai) kompakt.
2. M = Rn+ und supp(ω) kompakt. Dann ist
ω =n∑
i=1
ai dx1 ∧ ... ∧ dxi ∧ ... ∧ dxn,
∂M = x1 = 0. Also ist
dω =n∑
i=1
(−1)i−1 · ∂ai
∂xi
dx1 ∧ ... ∧ dxn
und Fubini liefert ∫Rn
+
dω =n∑
i=1
(−1)i−1 ·∫
Rn+
∂ai
∂xi
dx1...dxn
︸ ︷︷ ︸=:I
(12)
Fur das Integral I gilt im Falle i = 1:
I =
∫Rn−1
∞∫0
∂a1
∂x1
dx1
dx2...dxn = −∫
Rn−1
a1(0, x2, ..., xn) dx2, ..., dxn,
da supp(αi) kompakt ist. Fur i ≥ 2 erhalten wir fur I:
I = ±∫
Rn−1
∞∫−∞
∂ai
∂xi
dxi
dx1...dxi...dxn = 0,
da supp(ai) kompakt ist.
Damit folgt fur (12):∫Rn
+
dω = −∫
Rn−1
a1(0, x2, ..., xn) dx2 ∧ ... ∧ dxn =
∫Rn−1
ω
fur die vorher gewahlte induzierte Orientierung.
In dieser Orientierung ist∂
∂x2
, ...,∂
∂xn
negativ orientiert.
- 19 -
3. Im allgemeinen Fall wahlen wir einen orientierten Atlas ϕ−1α : Uα −→ Vα und
unterordnete Partitionen der Eins %ν : M −→ [0, 1]. Dann ist
ω =∑
ν
%ν · ω
mit supp(%ν · ω) ⊆ Uα(ν). Wegen supp(%ν · ω) ⊆ supp(ω) ist supp(%ν · ω) als abge-
schlossene Teilmenge einer kompakten Menge wieder kompakt. Uα ist diffeomorph zu
Vα ⊆ Rn oder Rn+ (und zwar durch den orientierten Diffeomorphismus ϕ−1
α ). Nach 1.
und 2. folgt also∫M
d(%ν · ω) =
∫Uα
(ϕα)∗(d(%ν · ω))(5)=
∫Uα
d((ϕα)∗(%ν · α))
1.+2.=
∫Uα∩ϕ−1
α (∂M)
ϕ∗α(%ν · ω) =
∫Vα∩∂M
%ν · ω =
∫∂M
%ν · ω.
Beispiele 2.24
1. Hauptsatz der Differential- und Integralrechnung
∫[a,b]
df =
∫∂[a,b]
f ⇐⇒b∫
a
f ′(x) dx = f(b)− f(a)
(Der”Weg“ sei so orientiert, dass er von a nach b lauft)
2. Fur Ω ⊆ R2 mit glattem Rand ∂Ω gilt der Integralsatz von Green∫∂Ω
f dx+ g dy =
∫Ω
(∂g
∂x− ∂f
∂y
)dx ∧ dy.
Insbesondere ist der Flacheninhalt∫Ω
dx ∧ dy =
∫∂Ω
x dy = −∫∂Ω
y dx =1
2·∫∂Ω
x dy − y dx = λ2(Ω).
Das war bisher nur muhsam zu berechnen, falls Ω keine”schone“ Struktur (Graph,
oder ahnliches) hatte.
- 20 -

2.4 Geschlossene und exakte Formen
Wir stellen nun kurz noch einige Begriffe bereit, die im folgenden Kapitel eine zentrale
Rolle spielen werden:
Definition 2.25 Eine stetig differenzierbare Differentialform ω auf Rn heißt geschlossen,
wenn dω = 0 ist.
Eine stetige k- Form ω heißt exakt, wenn es eine stetig differenzierbare (k − 1)- Form
η auf auf einer offenen Menge U gibt, so dass ω = dη ist. In diesem Fall nennt man η
eine Stammform von ω. Ist k = 0, so heißt η ∈ Ω0(M) = C∞(M) Stammfunktion oder
Potential.
Bemerkung:
Auf einer geschlossenen Mannigfaltigkeit kann es keine exakten Volumenformen geben, da
sonst
0 6= Vol(M) =
∫M
ω =
∫M
dα(11)=
∫∂M=∅
α = 0,
Widerspruch.
Beispiele 2.26
1. Wegen d2 = 0 folgt fur eine exakte Form ω
ω = dη =⇒ dω = d(dη) = d2η = 0.
Also ist jede exakte Form auch geschlossen.
Fur k = 1 ist α =n∑
i=1
ai dxi geschlossen ⇐⇒
0 = dα =n∑
i=1
dai ∧ dxi =n∑
i=1
(n∑
j=1
∂ai
∂xj
dxj
)∧ dxi =
∑i<j
(∂aj
∂xi
− ∂ai
∂xj
)dxi ∧ dxj
⇐⇒ ∂ai
∂xj
=∂aj
∂xi
wie fruher.
2. Wir betrachten die Spharenvolumenform
ω :=x dy − y dx
x2 + y2. (13)
- 21 -

Wegen
dω =∂
∂x
(x
x2 + y2
)dx ∧ dy − ∂
∂y
(y
x2 + y2
)dy ∧ dx
=
[∂
∂x
(x
x2 + y2
)+
∂
∂y
(y
x2 + y2
)]︸ ︷︷ ︸
=0
dx ∧ dy
= 0
ist ω eine geschlossene 1- Form auf R2 \ 0. Stellt man ω in Polarkoordinaten (r, ϕ)
dar (siehe (14)), so ist ω = dϕ. Wahlt man nun eine Schleife als Integrationsweg
(beispielsweise den Rand des Einheitskreises D), so ist
∫∂D
dϕ = 2 · π 6= 0. Also kann
ω auf R2 \ 0 keine Stammfunktion besitzen und ist damit nicht exakt.
Die Implikation”geschlossen =⇒ exakt“ gilt also im Allgemeinen nicht. Eine hinreichende
Bedingung fur die Exaktheit liefert das Lemma von Poincare:
Satz 2.27 (Lemma von Poincare) Sei U ⊆ Rn eine offene, sternformige Menge. Sei ω
eine stetig differenzierbare Differentialform k- ten Grades (1 ≤ k ≤ n) auf U mit dω = 0.
Dann existiert eine stetig differenzierbare Differentialform η vom Grade (k− 1) auf U mit
ω = dη.
Den Unterschied zwischen Geschlossenheit und Exaktheit misst die de Rham- Kohomologie
Hk(M) := geschlossene k- Form auf M/exakte k- Form auf M = Kern(d)/Bild(d).
Diesen Sachverhalt werden wir im folgenden Kapitel ausfuhrlicher behandeln.
Bemerkungen:
1. Fur exakte Formen ist die Stammform nicht eindeutig:
dx ∧ dy = d(x dy) = d(−y dx) = d
(−y dx+ x dy
2
)2. Fur k > dim(M) ist Ωk(M) = 0.
- 22 -

3. Polarkoodinaten: Bei der Umrechnung von kartesischen in Polarkoodinaten erhalten
wir
x = r · cos(ϕ)
y = r · sin(ϕ)
=⇒dx = cos(ϕ) dr − r · sin(ϕ) dϕ
dy = sin(ϕ) dr + r · cos(ϕ) dϕ.
Also ist
x dy = r · sin(ϕ) · cos(ϕ) dr + r2 · cos2(ϕ) dϕ
−y dx = −r · sin(ϕ) · cos(ϕ) dr + r2 · sin2(ϕ) dϕ.
Dies fuhrt auf die Winkelform
x dy − y dx
2=
1
2· r2 dϕ
x dy − y dx
x2 + y2= dϕ
dx ∧ dy = r dr ∧ dϕ = d
(x dy − y dx
2
). (14)
Umrechnung des Flacheninhalts von kartesischen im Polarkoordinaten.
3 De Rham Kohomologien
Wir haben bereits gesehen, dass die Form in (13) auf R2 \ 0 nicht exakt ist. Auf H :=
(x, y) ∈ R2 | x > 0 gilt jedoch
dθ = d(arctan
(yx
))= ω;
womit ω auf H exakt ist.
Diesen Sachverhalt kann man allgemein beobachten:
Eine offene Menge X enthalt um jeden ihrer Punkte x eine offene (Kreis-) Umgebung
Uε(x) ⊆ X, welche diffeomorph zum (sternkonvexen) Rn ist. Deshalb besitzt jede auf X
geschlossene k- Form eine lokale Stammform.
Wir sehen also, dass uns geschlossene Differentialformen etwas uber die topologische Struk-
tur von Mannigfaltigkeiten sagen konnen. Die Eigenschaft, dass sie keine Stammform be-
sitzen, deutet auf die Existenz von”Lochern“ in der Mannigfaltigkeit hin (Lemma von
Poincare).
- 23 -
3.1 Die de Rham Gruppen
Sei M eine hinreichend glatte Mannigfaltigkeit. Da die außere Ableitung (siehe Satz (2.18))
d : Ωp(M) −→ Ωp+1(M)
linear ist, sind Bild(d) und Kern(d) Untervektorraume. Wir definieren
Zp(M) := Kern(d : Ωp(M) −→ Ωp+1(M)) = geschlossene p- Form auf M und
Bp(M) := Bild(d : Ωp−1(M) −→ Ωp(M)) = exakte p- Form auf M.
Die Abkurzungen Z und B stammen aus der algebraischen Topologie. Diese Mengen haben
etwas mit zu Zyklen und Randern (boundaries) dualer Objekten zu tun. Wir nennen diese
Raume k- Kozyklen bzw. k- Korander.
Diese Vektorraume sind im Allgemeinen unendlich- dimensionale Vektorraume. Da jede
exakte Form geschlossen ist, gilt
Bp(M) ⊆ Zp(M).
Bp(M) ist also ein Untervektorraum von Zp(M). Deshalb konnen wir die p- te de Rham
Kohomologiegruppe von M (mit Koeffizienten in R) als die Faktorgruppe
Hp(M) := Zp(M)/Bp(M) (15)
definieren. Dies ist ebenfalls ein Vektorraum, also insbesondere eine Gruppe unter Vektor-
addition.
Die Kohomologiegruppe in (15) liefert, wenn man sie kennt, Informationen uber die Topo-
logie der Mannigfaltigkeit.
Dadurch dass aber gerade die exakten Formen aus Hp(M)”herausdividiert“ werden, kann
man die Kohomologiegruppe als Maß fur das Fehlen von Exaktheit geschlossener Formen
ansehen.
Hk(M) = 0 bedeutet, dass jede geschlossene k- Form auf M auch eine Stammform be-
sitzt, also auch exakt ist.
Fur komplexwertige Differentialformen ist d : Ωp(M,C) −→ Ωp+1(M,C). Die de Rham
Gruppe lasst sich dann also direkte Zerlegung schreiben:
H(M,C) = H(M,R)⊕ i · H(M,R).
- 24 -

Es ist zu beachten, dass selbst, wenn Zp(M) und Bp(M) unendlich- dimensionale Vek-
torraume sind, der Vektorraum Hp(M) durchaus endlich dimensional sein kann.
Fur jede geschlossene Form ω auf M sei [ω] die Aquivalenzklasse von ω in Hp(M), genannt
die Kohomologieklasse von ω.
Definitionsgemaß ist Hk(G) ein Objekt der Analysis. Nun stellt sich heraus, dass es eine
Bedeutung fur die Geometrie besitzt.
Beispiel 3.1
Es sei q die Anzahl der Wegzusammenhangskomponenten (Zusammenhangskomponenten)
von U ⊆ Rn offen. Dann ist H0(U) = Rq.
Beweis:
H0(U) = f∈C∞(U)|df=0/0
= f ∈ C∞(U) | f konstant auf jeder Zusammenhangskomponente
= Rq.
Man kann nun zeigen, dass die in (15) definierten de Rham Gruppen topologische Inva-
rianten sind. Das bedeutet insbesondere, dass diffeomorphe Teilmengen des Rn isomorphe
de Rham Kohomologiegruppen haben. Dasselbe gilt fur Mannigfaltigkeiten:
Satz 3.2 Die de Rham Kohomologiegruppen sind topologische Invarianten. Das heißt:
Sind M und N homoomorphe Mannigfaltigkeiten, dann sind die zugehorigen de Rham
Kohomologiegruppen isomorph.
Seien ω1 und ω2 zwei geschlossene Formen in einer Aquivalenzklasse [ω]. Dann unterschei-
den sie sich nur durch eine exakte Form:
ω1 = ω2 + ωexakt
Damit gilt fur das Integral uber eine orientierte Untermannigfaltigkeit N ⊆M ohne Rand
dieser Formen∫N
ω1 =
∫N
(ω2 + ωexakt) =
∫N
ω2 +
∫N
ωexakt =
∫N
ω2 +
∫N
dη =
∫N
ω2 +
∫∂N
η
︸︷︷︸=0
=
∫N
ω2.
- 25 -

Damit kann das Integral uber eine Aquivalenzklasse als Linearform aufgefasst werden:∫N
[ω] : Hk(M) −→ R.
Definition 3.3 Sei M eine n- dimensionale Mannigfaltigkeit. Mit der außeren Ableitung
d betrachten wir die Sequenz
0 −→ Ω0(M)︸ ︷︷ ︸=C∞(M)
d−→ ...d−→ Ωp(M)
d−→ Ωp+1(M) −→ ... −→ Ωn(M)d−→ 0.
Diese Folge heißt de Rham Kettenkomplex.
Die Bedingung dω = 0 (das heißt ω ist geschlossen) ist genau dann eine hinreichende
Bedingung fur die Losbarkeit der Gleichung dη = ω fur η ∈ Ωp−1(M) (das heißt ω ist
exakt), falls der de Rham Komplex von M im Grad p exakt ist. Wir dehnen nun das
Dachproduktes ∧ auf die de Rham- Kohomologiegruppen Hp(M) einer Mannigfaltigkeit
M aus.
Definition 3.4 Das Dachprodukt zwischen zwei Kohomologiegruppen ist definiert als
∧ : Hp(M)×Hq(M) −→ Hp+q(M)
[ω] ∧ [η] := [ω ∧ η].
Die direkte Summe
H∗(M) :=∞⊕
k=0
Hk(M)
heißt die de Rham- Kohomlogie.
Beweis: Zunachst zeigen wir die Wohldefiniertheit des Dachproduktes auf den Kohomo-
logiegruppen:
Seien ω ∈ Ωp(M) und η ∈ Ωq(M) geschlossene Formen, das heißt es gilt dω = 0 und dη = 0.
Weiterhin seien [ω] ∈ Hp(M) und [η] ∈ Hq(M) die zugehorigen Kohomologieklassen. Nach
der Produktregel folgt nun
d(ω ∧ η) = dω ∧ η + (−1)k · ω ∧ dη = 0.
- 26 -

Damit ist auch ω ∧ η ∈ Ωp+q(M) geschlossen. Es gilt also
[ω] ∧ [η] = [ω ∧ η] ∈ Hp+q(M).
Es bleibt zu zeigen, dass das Dachprodukt unabhangig von Reprasentanten der Koho-
mologieklasse ist, das heißt aus [ω] = [ω] muss [ω] ∧ [η] = [ω] ∧ [η] folgen. Damit ware
[(ω + dζ) ∧ η] = [ω ∧ η] und dζ ∧ η schließlich exakt.
Wegen dη = 0 ist
d(ζ ∧ η) = dζ ∧ η + (−1)k−1 · ζ ∧ dη︸︷︷︸=0
= dζ ∧ η.
Das heißt, dass das Dachprodukt einer exakten und einer geschlossenen Form wiederum
eine exakte Form liefert. Es folgt also
[(ω + dζ) ∧ η] = [ω ∧ η]
und damit die Wohldefiniertheit des Dachprodukts fur Kohomologieklassen.
Definition 3.5 Sei ϕ : M −→ N differenzierbar der pull- back von α unter ϕ ist gegeben
durch
ϕ∗ : Hk(N) −→ Hk(M)
ϕ∗([α]) = [ϕ∗α].
Da die außere Ableitung mit dem pull- back vertausch, also ϕ∗dω(5)= d(ϕ∗ω) fur eine diffe-
renzierbare Abbildung ϕ : M −→ N gilt, bildet ϕ∗ Kozyklen auf Kozyklen und Korander
auf Korander ab; induziert also eine lineare Abbildung
ϕ∗ : Hk(N) −→ Hk(M).
Diese Definition ist nach obigem wohldefiniert und erfullt die Gleichung
ϕ∗([α] ∧ [β]) = ϕ∗([α]) ∧ ϕ∗([β]).
- 27 -

4 Literaturverzeichnis
[1] John Lee, Introduction to Smooth Manifolds, Springer, 2006
[2] Klaus Janich, Vektoranalysis, Springer, 1992
[3] Raoul Bott / Loring W. Tu, Differential Forms in Algebraic Topology, Springer, 1995
[4] Theodor Brocker, Analysis Band 3, Spektrum Akademischer Verlag, 1992
- 28 -