design and implementation of digital secure communication based on synchronized chaotic systems
TRANSCRIPT
Digital Signal Processing 20 (2010) 229–237
Contents lists available at ScienceDirect
Digital Signal Processing
www.elsevier.com/locate/dsp
Design and implementation of digital secure communication based onsynchronized chaotic systems
Jui-Sheng Lin a, Cheng-Fang Huang b, Teh-Lu Liao b, Jun-Juh Yan c,∗a Department of Electrical Engineering, Far East University, Tainan 744, Taiwan, ROCb Department of Engineering Science, National Cheng Kung University, Tainan 701, Taiwan, ROCc Department of Computer and Communication, Shu-Te University, Kaohsiung 824, Taiwan, ROC
a r t i c l e i n f o a b s t r a c t
Article history:Available online 3 May 2009
Keywords:Secure communicationChaosSynchronizationVariable structure control (VSC)Equivalent control
In this paper, we study the design and implementation of digital secure communicationsystems via synchronized Sprott chaotic circuits. First, using the variable structure control(VSC) technique, we propose a control law to cope with the synchronization problem ofthe master and slave Sprott circuits. Then, according to the concept of equivalence control,it can ensure that the message embedded in the transmitter (master Sprott circuit) can berecovered in the receiver (slave Sprott circuit). Then a digital secure communication systembased on synchronized coupled chaotic systems is implemented using basic electroniccomponents. Finally, both simulation results and the experimental results demonstratethe proposed VSC-based synchronization scheme’s success in the secure communicationapplication.
© 2009 Elsevier Inc. All rights reserved.
1. Introduction
Chaos is a kind of characteristics of nonlinear systems, which is a bounded unstable dynamic behavior that exhibits sen-sitive dependence on initial conditions and includes infinite unstable periodic motions. Although it appears to be stochastic,it occurs in a deterministic nonlinear system under deterministic conditions. Huber published the first paper on chaoscontrol in 1989 [1] and Pecora and Carroll presented the conception of chaotic synchronization for two identical chaoticsystems with different initial conditions in 1990 [2]. Till now, many methods and techniques for synchronizing chaos havebeen proposed, such as active control [3], observer-based control [4], feedback and non-feedback control [5–7], adaptivecontrol [8], etc. Moreover, the synchronization of chaotic circuits for the secure communication has received much attentionin the literature [5,9–14]. This is due to the fact that utilizing chaotic circuits offers some advantages in communicationsystems such as broadband noise-like waveform, prediction difficulty, sensitivity to initial condition variations, etc. As wellknown, synchronization of chaos is a key technology in generating an identical chaotic waveform in both transmitter andreceiver for signal decoding in communication systems. Therefore, this paper firstly aims to propose a new synchronizingmethod and then construct a digital secure communication system based on the proposed chaotic synchronization.
In this paper, we study the design and implementation of a VSC-based chaotic communication system. We first proposea new VSC-based control scheme to solve the synchronization problem of chaotic systems. To achieve this goal, a switchingsurface is first proposed to ensure the stability of the closed-loop error system in sliding motion. And then, based onthis switching surface, a VSC is derived to guarantee the attraction of the sliding manifold. Moreover, as an application,the proposed VSC synchronization scheme is then applied to establish a chaotic digital secure communication system.
* Corresponding author. Fax: +886 7 6158000x4899.E-mail address: [email protected] (J.-J. Yan).
1051-2004/$ – see front matter © 2009 Elsevier Inc. All rights reserved.doi:10.1016/j.dsp.2009.04.006
230 J.-S. Lin et al. / Digital Signal Processing 20 (2010) 229–237
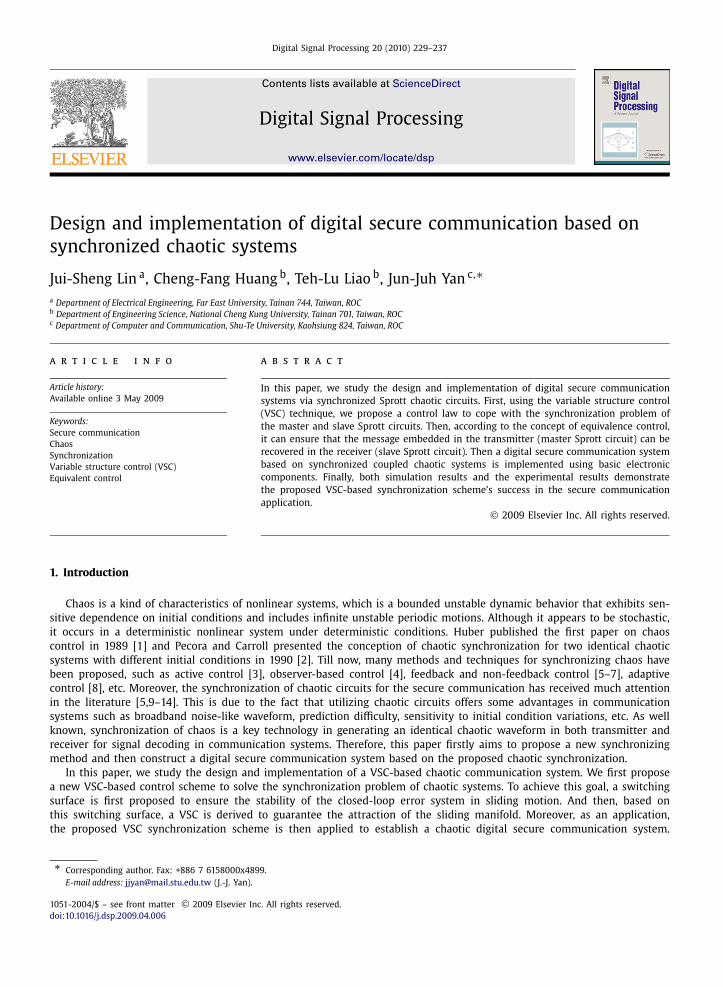
Fig. 1. Block diagram of chaotic communication system.
The proposed VSC controller is used to achieve the synchronization between the transmitter and receiver in the proposedcommunication system. Thus, it can ensure that the digital signal embedded by the master chaotic system in the transmittercan be recovered in the receiver via a so-called equivalent control and high performance communication can be obtained.To verify the system performance, a VSC-based chaotic secure communication system is realized by using some electroniccomponents containing operational amplifiers (OPAs), resistors and capacitors. Finally, both simulation and experimentalresults are given to verify the proposed VSC synchronization scheme’s success in the communication application.
Note that throughout the remainder of this paper, |w| represents the absolute value of w . sign(s) is the sign functionof s, if s > 0, sign(s) = 1; if s = 0, sign(s) = 0; if s < 0, sign(s) = −1.
2. System description and problem formulation
In the following, we discuss the design of digital secure communication systems via synchronized chaotic circuits. Forsimplicity, we select Sprott chaotic circuits for our design. However, the method developed in this paper can also be easilyextended for a general class of chaotic systems. Fig. 1 illustrates that the proposed communication system consists of atransmitter and a receiver (master and slave Sprott circuits, respectively). The digital message m(t) is embedded into thechaotic transmitter and the state of master Sprott system is simultaneously transmitted to the receiver. A variable structurecontroller is given in the receiver to achieve synchronization. And then, the input message m(t) can be completely recoveredon the side of receiver using the equivalent controller ueq(t). Before constructing the secure communication system, the firstproblem undertaken here is to design a VSC controller to solve the synchronization problem of master–slave chaotic systems.The master–slave chaotic systems in Fig. 1 are defined below, respectively [15].
xm1 = xm2
xm2 = xm3
xm3 = −1.2xm1 − xm2 − 0.6xm3 + 2 sign(xm1) + m(t) (1)
and
xs1 = xs2
xs2 = xs3
xs3 = −1.2xs1 − xs2 − 0.6xs3 + 2 sign(xm1) + u(t) (2)
where u(t) is the control input proposed later to synchronize master and slave systems (1) and (2), m(t) is the embeddeddigital message bounded by
∣∣m(t)∣∣ � β, β > 0 (3)
Continuously, we define the error vector as the difference between the system (1) and (2).
E =⎡⎣
e1
e2
e3
⎤⎦ =
⎡⎣
xs1 − xm1
xs2 − xm2
xs3 − xm3
⎤⎦ (4)
Then, we have

J.-S. Lin et al. / Digital Signal Processing 20 (2010) 229–237 231
e1 = xs1 − xm1
e2 = xs2 − xm2
e3 = xs3 − xm3 (5)
and the following error dynamics can be obtained:
e1 = e2
e2 = e3
e3 = −1.2e1 − e2 − 0.6e3 + u(t) − m(t) (6)
It is clear that the synchronization problem is replaced by the equivalent problem of stabilization the error dynamics (6).In the presence of control function, the synchronization between two Sprott models may occur provided the error state canconverge to zero, i.e.
limt→∞
∥∥ei(t)∥∥ = lim
t→∞∥∥xsi(t) − xmi(t)
∥∥ → 0, i = 1,2,3
3. VSC design for secure communication system
As a design sequence of VSC scheme to stabilize the error dynamics (6) and achieve synchronization, there exist twomajor phases. First, select an appropriate switching surface such that the sliding motion on the sliding manifold is stable.Second, establish a VSC law which guarantees the attraction of the sliding manifold.
To assure the error dynamics (6) in the sliding manifold can be asymptotically stable. The designed switching surfaces(t) corresponding to E(t) is given as follows:
s(t) = a1e1 + a2e2 + e3 (7)
where s ∈ R and ai ∈ R for i = 1,2 are designed constants. According to the works in [16,17], when the system operates inthe sliding mode, the following equation must be satisfied
s(t) = a1e1 + a2e2 + e3 = 0 (8)
and
s(t) = a1e1 + a2e2 + e3 = 0 (9)
From (8), it is obtained
e3 = −a1e1 − a2e2 (10)
By (6) and (10), error dynamics become[e1
e2
]=
[0 1
−a1 −a2
][e1
e2
]= A
[e1
e2
](11)
Obviously, the error dynamics (11) is exponentially stable if the constants ai are suitable chosen such that the eigenvaluesof matrix A in (11) is with negative real parts. Also the convergence rate of (11) can be determined by the eigenvalues ofmatrix A. Furthermore, by (10), e3 converges to zero when e1 and e2 converge to zero. After establishing an appropriatesliding surface, the next step is to design a VSC controller to drive the system trajectories onto the sliding surface.
Theorem 1. If the control input u(t) is suitably designed as:
u(t) = u1 − r · sign(s(t)
); r > β (12)
where u1 = 1.2e1 − (a1 − 1)e2 − (a2 − 0.6)e3 , then reaching condition of s(t)s(t) < 0 of the sliding mode is satisfied and the trajec-tories of the controlled dynamics system converge to the sliding mode s(t) = 0.
Proof. Choose a positive definite Lyapunov function:
V (t) = 0.5s2(t) (13)
The derivative of V (t) with (3), (7), (12) is given by
s(t)s(t) = s(a1e1 + a2e2 + e3)
= s(−1.2e1 − e2 − 0.6e3 + u(t) − m(t) + a1e2 + a2e3
)= s
[−1.2e1 + (a1 − 1)e2 + (a2 − 0.6)e3 + u1 − r sign(s) − m(t)]
= s(−m(t) − r sign(s)
)� |s|∣∣m(t)
∣∣ − r|s|� (β − r)|s| (14)
232 J.-S. Lin et al. / Digital Signal Processing 20 (2010) 229–237
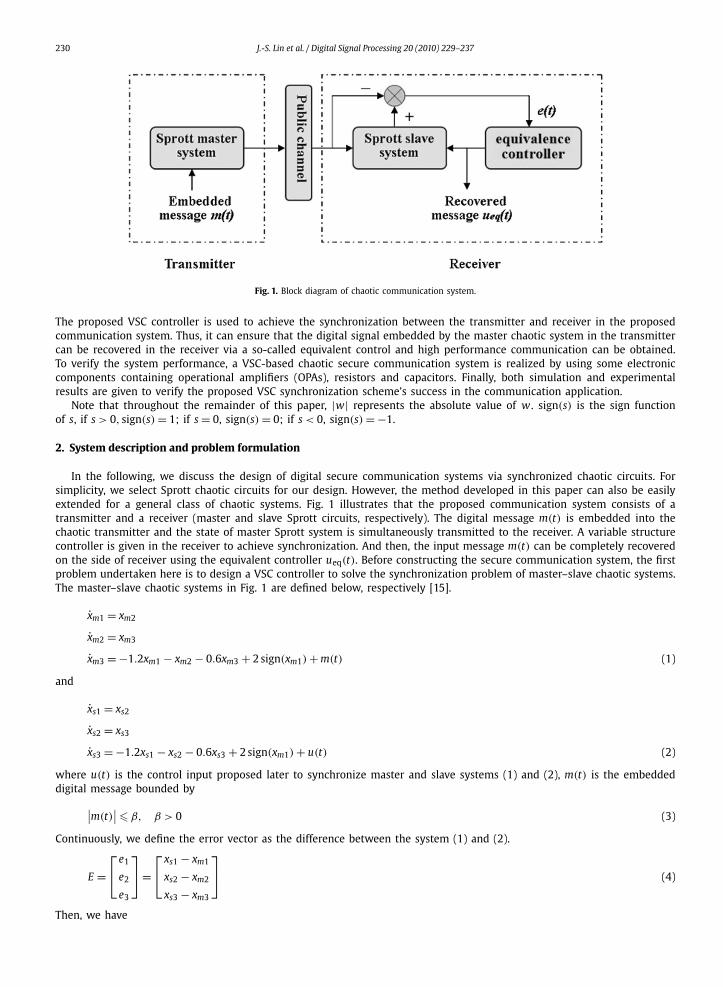
Fig. 2. Time response of s(t) under the proposed control (19).
Fig. 3. Time response of E(t) between master and slave system.
Fig. 4. Chaotic behavior of master chaotic system (1) with embedded m(t).
J.-S. Lin et al. / Digital Signal Processing 20 (2010) 229–237 233
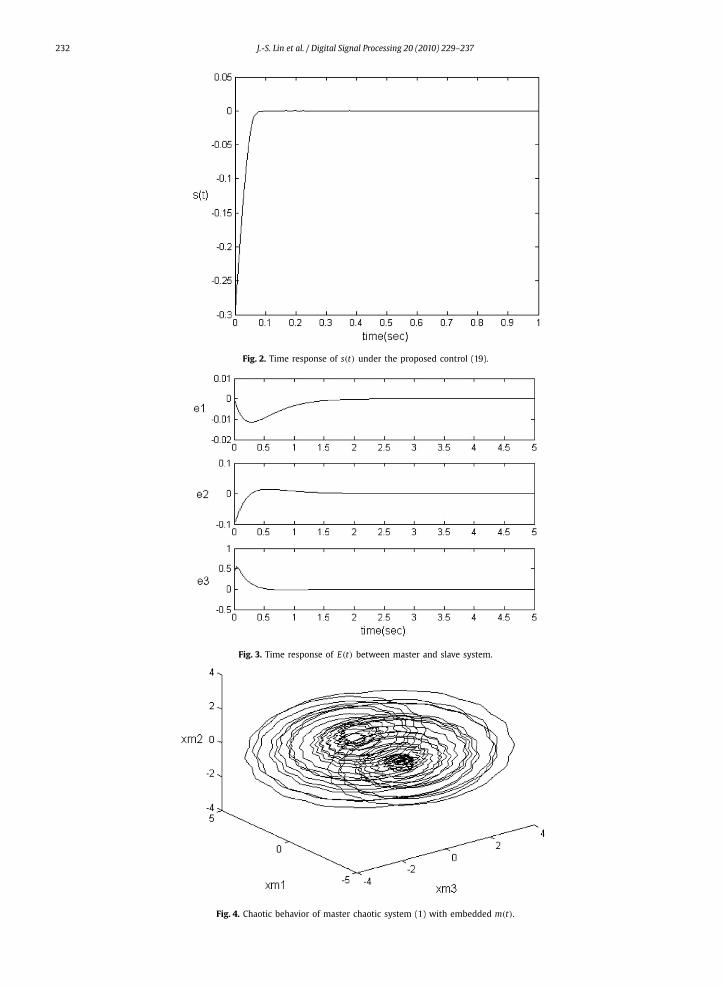
Fig. 5. Trajectories of equivalent control ueq(t) and input message m(t).
Fig. 6. Electronic implementation of master Sprott circuit.
Since r > β has been selected in (12), it can be concluded that s(t)s(t) < 0. Therefore s(t) always converges to theswitching surface s = 0. Hence the proof is achieved completely. �
Having ensured the error dynamics converges to zero as discussed above, we can further obtain following result:
e1 = 0
e2 = 0
e3 = 0 + u(t) − m(t) = 0 (15)

234 J.-S. Lin et al. / Digital Signal Processing 20 (2010) 229–237
Fig. 7. Electronic implementation of slave Sprott circuit.
Fig. 8. Electronic implementation of error state e(t) and switch surface s(t) circuit.
Then, we can deduce that
lim(u(t) − m(t)
) = 0 (16)
t→∞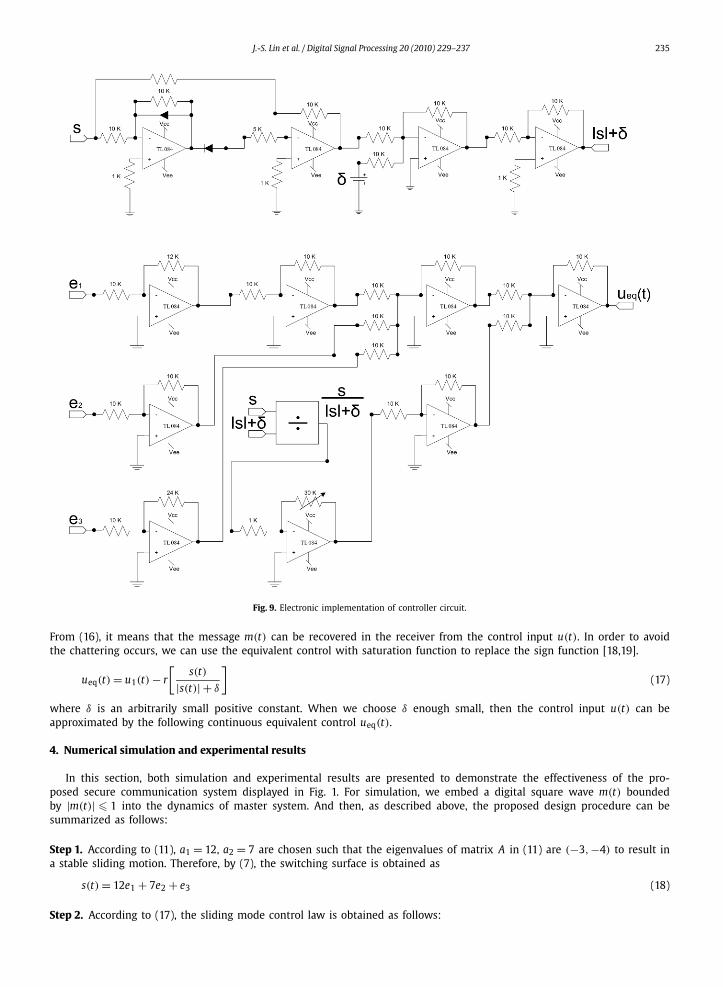
J.-S. Lin et al. / Digital Signal Processing 20 (2010) 229–237 235
Fig. 9. Electronic implementation of controller circuit.
From (16), it means that the message m(t) can be recovered in the receiver from the control input u(t). In order to avoidthe chattering occurs, we can use the equivalent control with saturation function to replace the sign function [18,19].
ueq(t) = u1(t) − r
[s(t)
|s(t)| + δ
](17)
where δ is an arbitrarily small positive constant. When we choose δ enough small, then the control input u(t) can beapproximated by the following continuous equivalent control ueq(t).
4. Numerical simulation and experimental results
In this section, both simulation and experimental results are presented to demonstrate the effectiveness of the pro-posed secure communication system displayed in Fig. 1. For simulation, we embed a digital square wave m(t) boundedby |m(t)| � 1 into the dynamics of master system. And then, as described above, the proposed design procedure can besummarized as follows:
Step 1. According to (11), a1 = 12, a2 = 7 are chosen such that the eigenvalues of matrix A in (11) are (−3,−4) to result ina stable sliding motion. Therefore, by (7), the switching surface is obtained as
s(t) = 12e1 + 7e2 + e3 (18)
Step 2. According to (17), the sliding mode control law is obtained as follows:
236 J.-S. Lin et al. / Digital Signal Processing 20 (2010) 229–237
(a) (b)
(c)
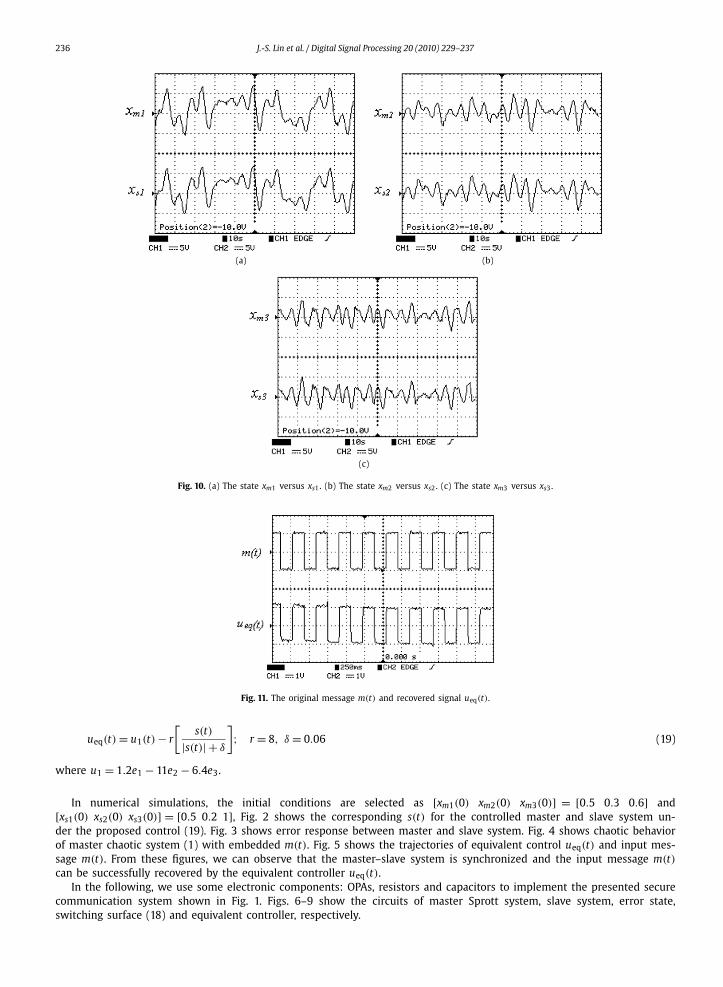
Fig. 10. (a) The state xm1 versus xs1. (b) The state xm2 versus xs2. (c) The state xm3 versus xs3.
Fig. 11. The original message m(t) and recovered signal ueq(t).
ueq(t) = u1(t) − r
[s(t)
|s(t)| + δ
]; r = 8, δ = 0.06 (19)
where u1 = 1.2e1 − 11e2 − 6.4e3.
In numerical simulations, the initial conditions are selected as [xm1(0) xm2(0) xm3(0)] = [0.5 0.3 0.6] and[xs1(0) xs2(0) xs3(0)] = [0.5 0.2 1], Fig. 2 shows the corresponding s(t) for the controlled master and slave system un-der the proposed control (19). Fig. 3 shows error response between master and slave system. Fig. 4 shows chaotic behaviorof master chaotic system (1) with embedded m(t). Fig. 5 shows the trajectories of equivalent control ueq(t) and input mes-sage m(t). From these figures, we can observe that the master–slave system is synchronized and the input message m(t)can be successfully recovered by the equivalent controller ueq(t).
In the following, we use some electronic components: OPAs, resistors and capacitors to implement the presented securecommunication system shown in Fig. 1. Figs. 6–9 show the circuits of master Sprott system, slave system, error state,switching surface (18) and equivalent controller, respectively.

J.-S. Lin et al. / Digital Signal Processing 20 (2010) 229–237 237
Experimental results. Fig. 10(a–c) shows the experimental results of synchronization between master and slave systems.Fig. 11 shows the original digital message m(t) and recovered signal by ueq(t) at the receiver side. The experimental resultsdemonstrate that the secure communication is obtained through the proposed VSC control scheme.
5. Conclusions
In this paper, a secure communication system via synchronized Sprott circuits has been presented. A variable structurecontroller has been proposed to ensure the synchronization between the master and the controlled slave Sprott chaoticsystems. Then, according to the concept of equivalence control, the message embedded in the transmitter can be recoveredin the receiver. Finally, both simulation results and the experimental results are given to verify the success of our design inthe secure communication application.
References
[1] A.W. Huber, Adaptive control of chaotic system, Helv. Acta 62 (1989) 343–346.[2] L.M. Pecora, T.L. Carroll, Synchronization in chaotic systems, Phys. Rev. Lett. 64 (8) (1990) 821–824.[3] E.W. Bai, K.E. Lonngren, Sequential synchronization of two Lorenz systems using active control, Chaos Solitons Fractals 11 (2000) 1041–1044.[4] X.S. Yang, G. Chen, Some observer-based criteria for discrete-time generalized chaos synchronization, Chaos Solitons Fractals 13 (2002) 1303–1308.[5] W.D. Chang, Digital secure communication via chaotic systems, Digital Signal Process. 19 (2009) 693–699.[6] M.T. Yassen, Chaos control of Chen chaotic dynamical system, Chaos Solitons Fractals 15 (2003) 271–283.[7] M.T. Yassen, Controlling chaos and synchronization for new chaotic system using linear feedback, Chaos Solitons Fractals 26 (2006) 913–920.[8] M.T. Yassen, Adaptive control and synchronization of a modified Chua’s circuit system, Appl. Math. Comput. 135 (2001) 113–128.[9] T.I. Chien, T.L. Liao, Design of secure digital communication systems using chaotic modulation, cryptography and chaotic synchronization, Chaos Solitons
Fractals 24 (2005) 241–255.[10] H.C. Chen, J.F. Chang, J.J. Yan, T.L. Liao, EP-based PID control design for chaotic synchronization with application in secure communication, Expert Syst.
Appl. 34 (2008) 1169–1177.[11] S. Wang, J. Feng, S. Xie, A multiuser chaotic communication scheme by parameter division multiple access, Circuits Syst. Signal Process. 26 (2007)
839–852.[12] J. Zhou, H.B. Huang, G.X. Qi, P. Yang, X. Xie, Communication with spatial periodic chaos synchronization, Phys. Lett. A 335 (2–3) (2005) 191–196.[13] Z. Li, K. Li, C. Wen, Y.C. Soh, A new chaotic secure communication system, IEEE Trans. Commun. 51 (8) (2003) 1306–1312.[14] Z. Li, D. Xu, A secure communication scheme using projective chaos synchronization, Chaos Solitons Fractals 22 (2) (2004) 477–481.[15] I. David, R. Almeida, J. Alvarez, J.G. Barajas, Robust synchronization of Sprott circuits using sliding mode control, Chaos Solitons Fractals 30 (2006)
11–18.[16] U. Itkis, Control System of Variable Structure, Wiley, New York, 1976.[17] V.I. Utkin, Sliding Mode and Their Application in Variable Structure System, Mir, Moscow, 1978.[18] C. Edwards, S.K. Spurgeon, R.J. Patton, Sliding mode observers for fault detection and isolation, Automatica 36 (2000) 541–548.[19] C.P. Tan, C. Edwards, Sliding mode observers for detection and reconstruction of sensor faults, Automatica 38 (2002) 1815–1821.
Jui-Sheng Lin received the Ph.D. degree from the Department of Engineering Science, National Cheng Kung University, Taiwan in 2007.He is now an Associate Professor in the Department of Electrical Engineering, Far East University, Taiwan. His research interests includemotor control, chaos communication systems and control engineering.
Cheng-Fang Huang received the B.S. and M.S. degrees from the Department of Computer and Communication, Shu-Te University,Taiwan in 2007 and 2009, respectively. His research interests include chaos synchronization and chaos communication.
Teh-Lu Liao received the M.S. and Ph.D. degrees from the Department of Electrical Engineering, National Taiwan University, Taiwanin 1984 and 1991, respectively. In 1991, he joined the Department of Engineering Science, National Cheng Kung University, where he iscurrently a Distinguished Professor in control theory and signal processing. Dr. Liao is a member of the IEEE. His research interests includecontrol theory, chaos communication systems, digital signal processing and network controlled systems.
Jun-Juh Yan received the M.S. degree in Electrical Engineering from National Central University, Taiwan in 1992 and the B.S. and Ph.D.degrees in Electrical Engineering from the National Cheng Kung University, Taiwan in 1987 and 1998, respectively. At present, he is aProfessor in the Department of Computer and Communication, Shu-Te University, Taiwan. His main research interests are in the area ofchaotic systems, neural networks and variable-structure control systems.