deber mecanismos impr
DESCRIPTION
ejercicios propuestos de analisisi cinematico de mecanismosTRANSCRIPT
DEBER DE MECANISMOS
Temas: Análisis Cinemático y Dinámico por el método de Raven.
A. PROBLEMAS DE ANÁLISIS DE VELOCIDAD PARA TODOS LOS PROBLEMAS DADOS A CONTINUACIÓN EMPLÉESE EL MÉTODO DE RAVEN
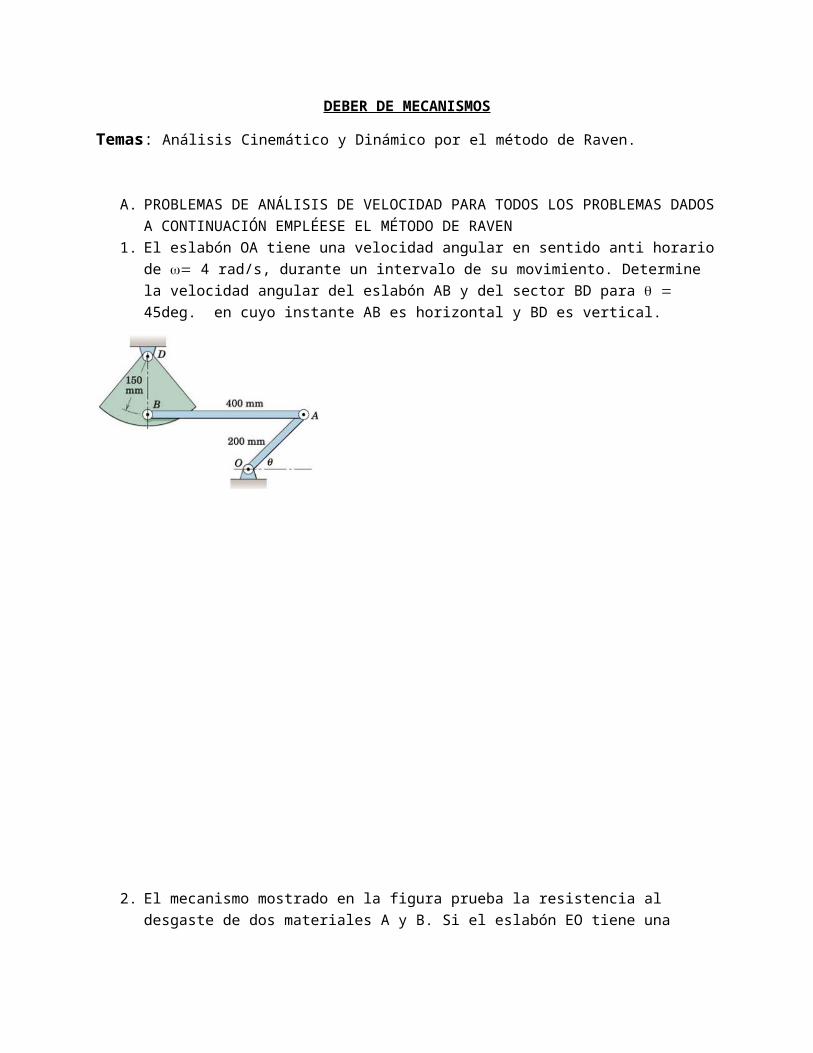
1. El eslabón OA tiene una velocidad angular en sentido anti horario de 4 rad/s, durante un intervalo de su movimiento. Determine la velocidad angular del eslabón AB y del sector BD para 45deg. en cuyo instante AB es horizontal y BD es vertical.
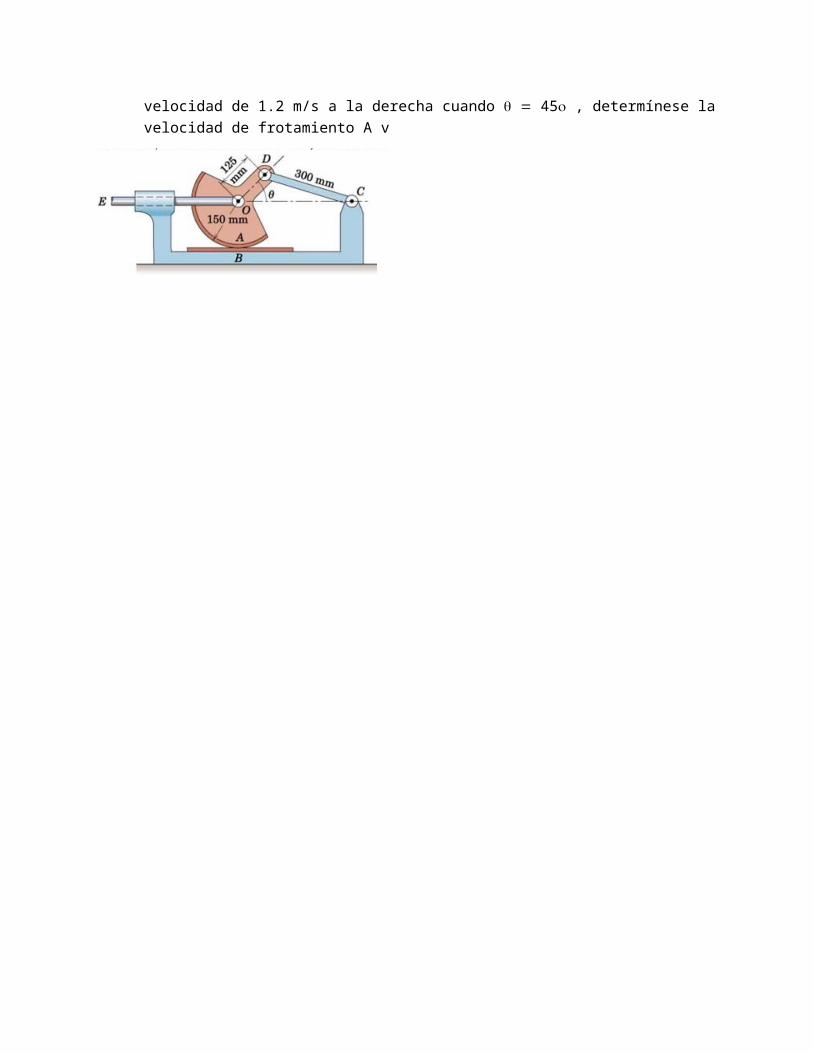
2. El mecanismo mostrado en la figura prueba la resistencia al desgaste de dos materiales A y B. Si el eslabón EO tiene una velocidad de 1.2 m/s a la derecha cuando 45 , determínese la velocidad de frotamiento A v
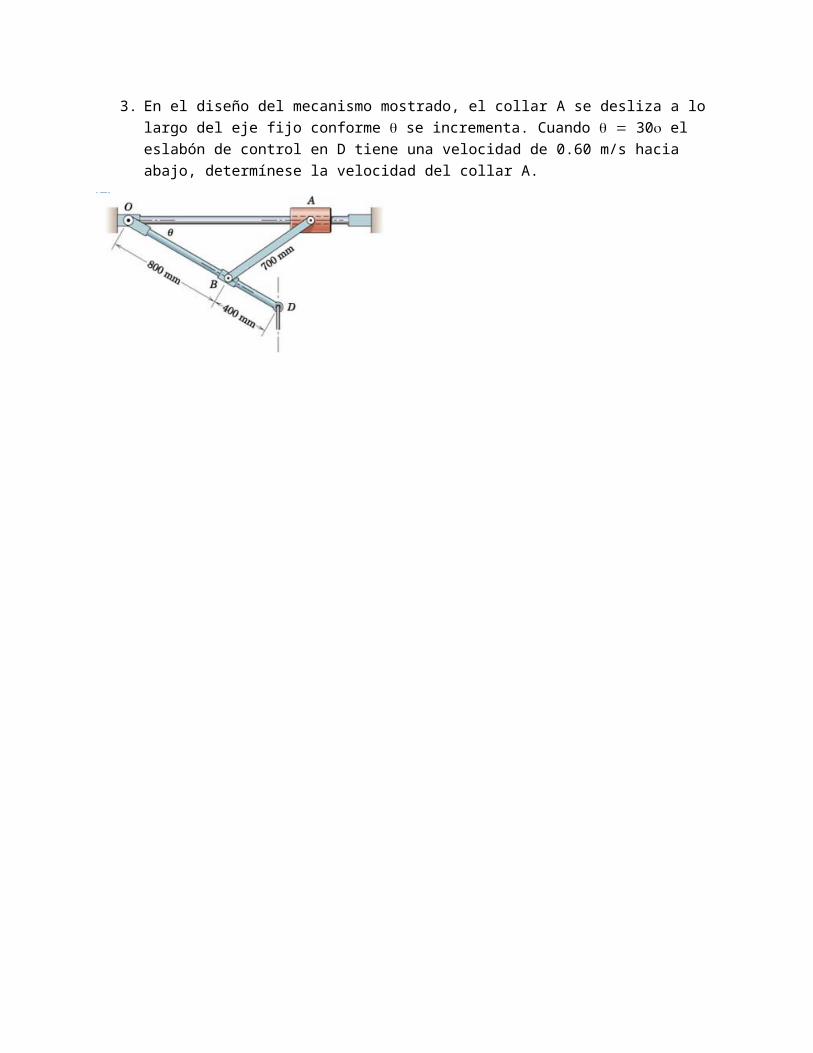
3. En el diseño del mecanismo mostrado, el collar A se desliza a lo largo del eje fijo conforme se incrementa. Cuando 30 el eslabón de control en D tiene una velocidad de 0.60 m/s hacia abajo, determínese la velocidad del collar A.
4. Para el instante representado, cuando la manivela OA está en posición horizontal, determine la velocidad del centro G del eslabón AB.

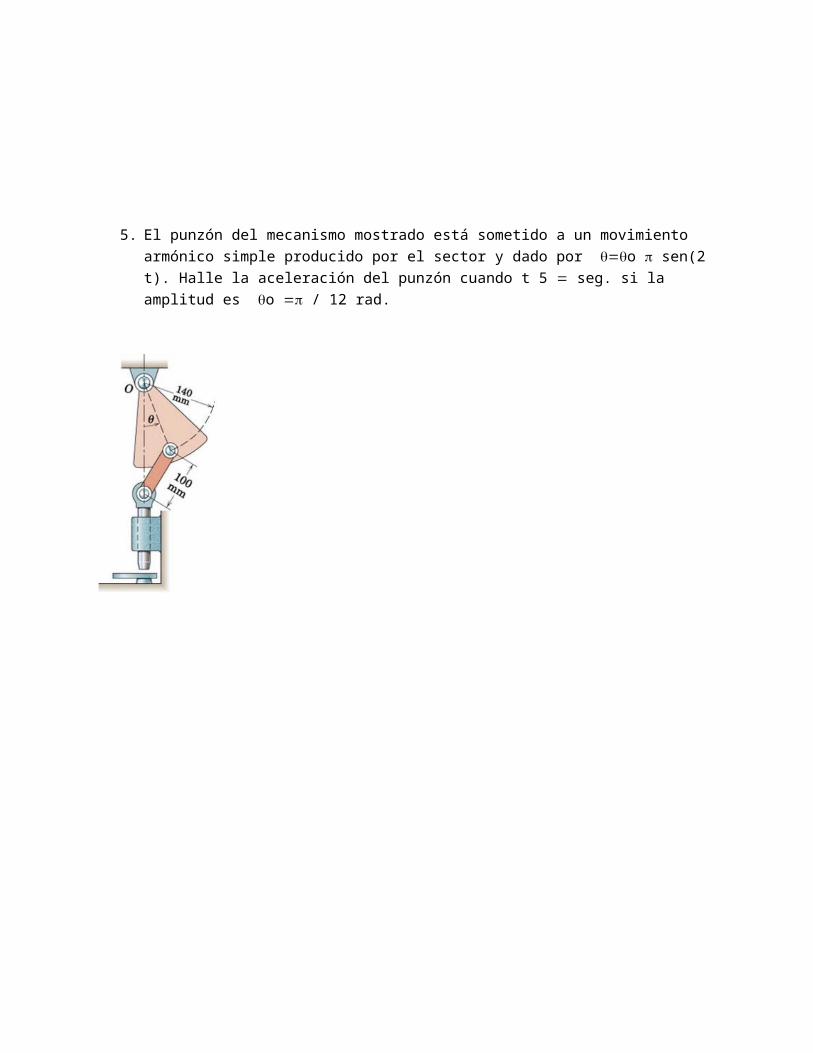
5. El punzón del mecanismo mostrado está sometido a un movimiento armónico simple producido por el sector y dado por o sen(2 t). Halle la aceleración del punzón cuando t 5 seg. si la amplitud es o / 12 rad.
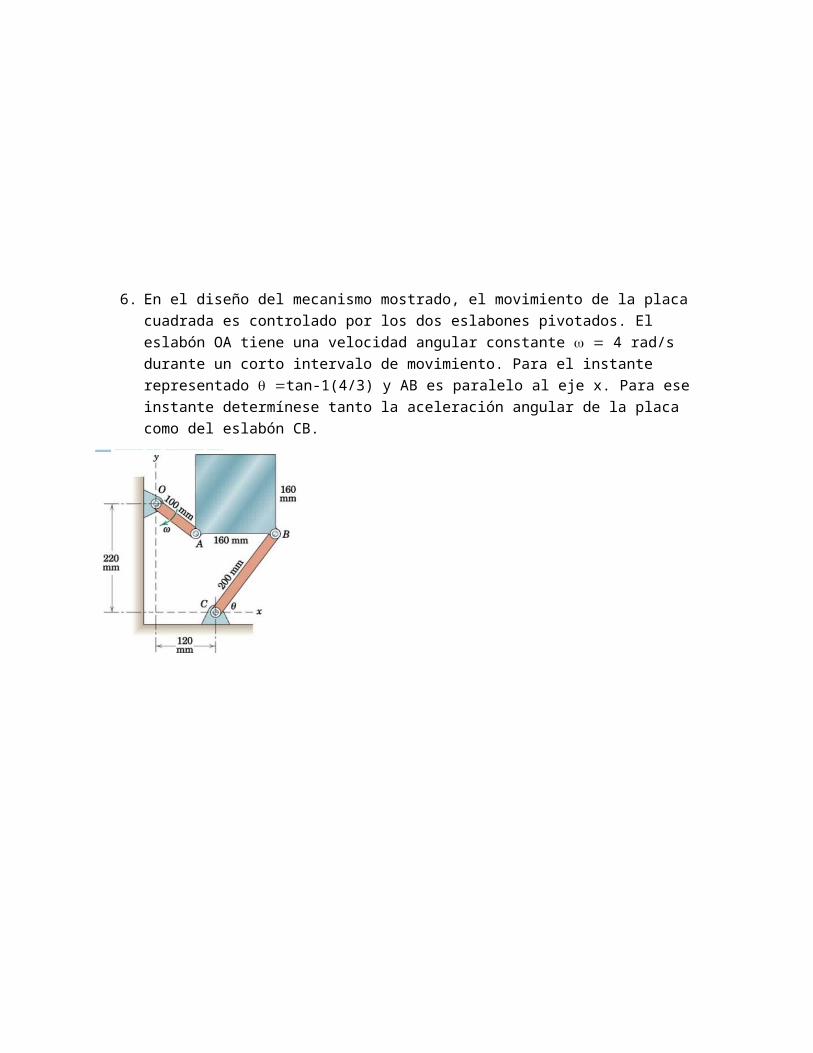
6. En el diseño del mecanismo mostrado, el movimiento de la placa cuadrada es controlado por los dos eslabones pivotados. El eslabón OA tiene una velocidad angular constante 4 rad/s durante un corto intervalo de movimiento. Para el instante representado tan-1(4/3) y AB es paralelo al eje x. Para ese instante determínese tanto la aceleración angular de la placa como del eslabón CB.

7. Para la posición mostrada, donde 30 , el punto A del collar deslizante tiene una velocidad constante de 0.3 m/s con el alargamiento correspondiente del cilindro hidráulico AC. Para esta misma posición BD es horizontal y DE es vertical, determine la aceleración angular de DE en este instante

8. Analisis de Coreolis
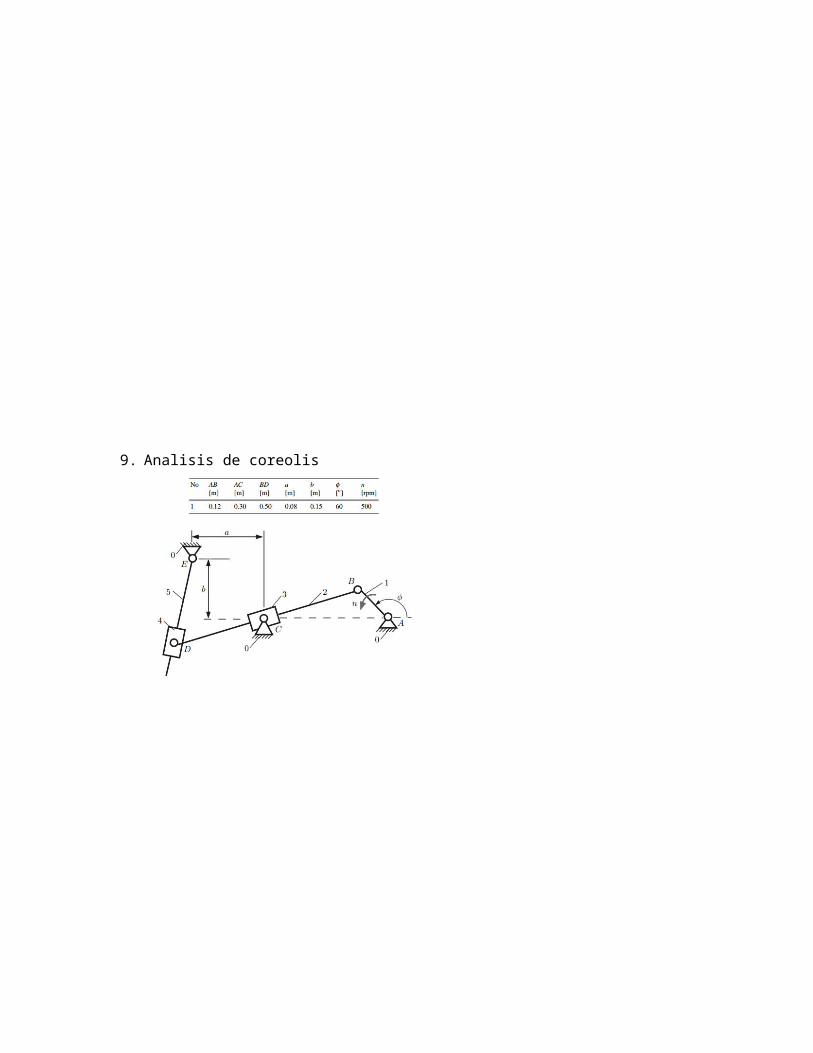
9. Analisis de coreolis

10.

11.