cse 152, spring 2015 introduction to computer...
TRANSCRIPT
1
CSE 152, Spring 2015 Introduction to Computer Vision
Course Review
Introduction to Computer Vision
CSE 152
Lecture 20
CSE 152, Spring 2015 Introduction to Computer Vision
Announcements
• Homework 3 has been graded and returned
• Homework 4 is due tomorrow, 11:59 PM– Will try to have graded and returned by
Monday, June 8
• Final exam is a take home exam
CSE 152, Spring 2015 Introduction to Computer Vision
Course Review
• Human visual system
• Image formation and cameras
• Photometric image formation
• Color
• Binary image processing
• Filtering
• Edge detection and corner detection
• Hough transform and line fitting
CSE 152, Spring 2015 Introduction to Computer Vision
Course Review
• Stereo
• Photometric stereo
• Recognition
• Motion
• Optical flow
CSE 152, Spring 2015 Introduction to Computer Vision
Human Visual System
CSE 152, Spring 2015 Introduction to Computer Vision
Structure of the eye
2
CSE 152, Spring 2015 Introduction to Computer Vision
Rods and cones
Cones
CSE 152, Spring 2015 Introduction to Computer Vision
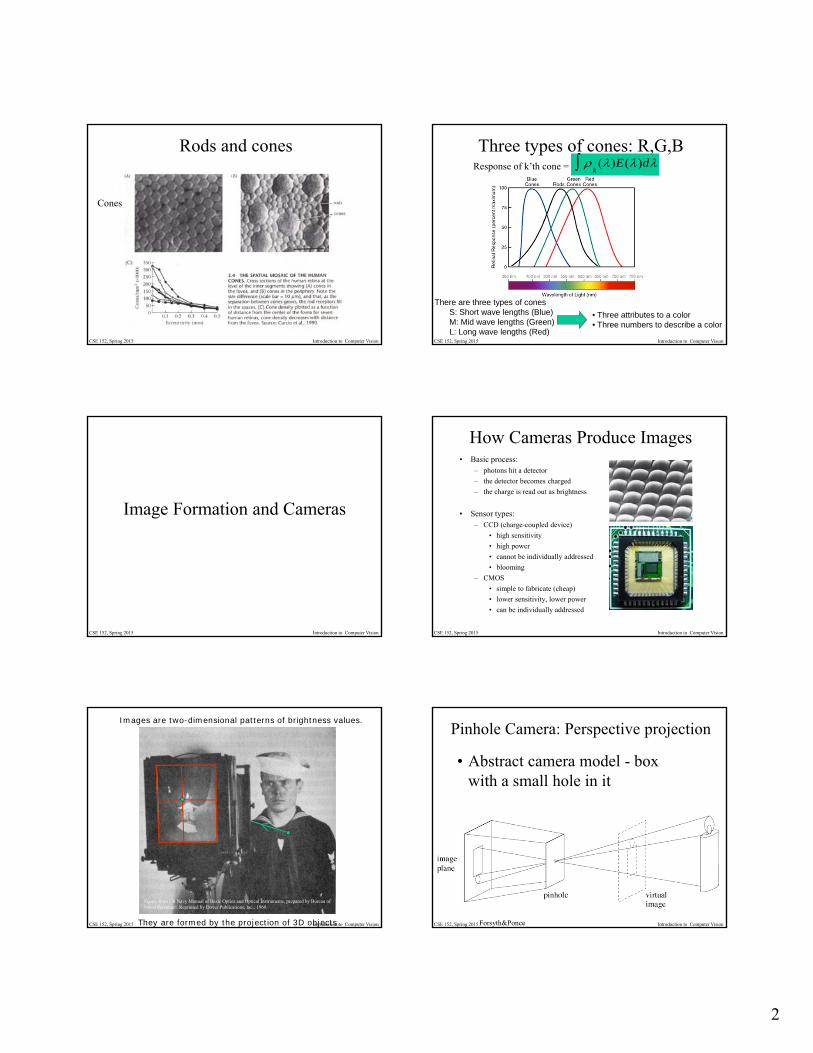
Three types of cones: R,G,B
There are three types of conesS: Short wave lengths (Blue)M: Mid wave lengths (Green)L: Long wave lengths (Red)
• Three attributes to a color• Three numbers to describe a color
Response of k’th cone = k()E()d
CSE 152, Spring 2015 Introduction to Computer Vision
Image Formation and Cameras
CSE 152, Spring 2015 Introduction to Computer Vision
How Cameras Produce Images• Basic process:
– photons hit a detector
– the detector becomes charged
– the charge is read out as brightness
• Sensor types:– CCD (charge-coupled device)
• high sensitivity
• high power
• cannot be individually addressed
• blooming
– CMOS
• simple to fabricate (cheap)
• lower sensitivity, lower power
• can be individually addressed
CSE 152, Spring 2015 Introduction to Computer Vision
Images are two-dimensional patterns of brightness values.
They are formed by the projection of 3D objects.
Figure from US Navy Manual of Basic Optics and Optical Instruments, prepared by Bureau of Naval Personnel. Reprinted by Dover Publications, Inc., 1969.
CSE 152, Spring 2015 Introduction to Computer Vision
Pinhole Camera: Perspective projection
• Abstract camera model - box with a small hole in it
Forsyth&Ponce
3
CSE 152, Spring 2015 Introduction to Computer Vision
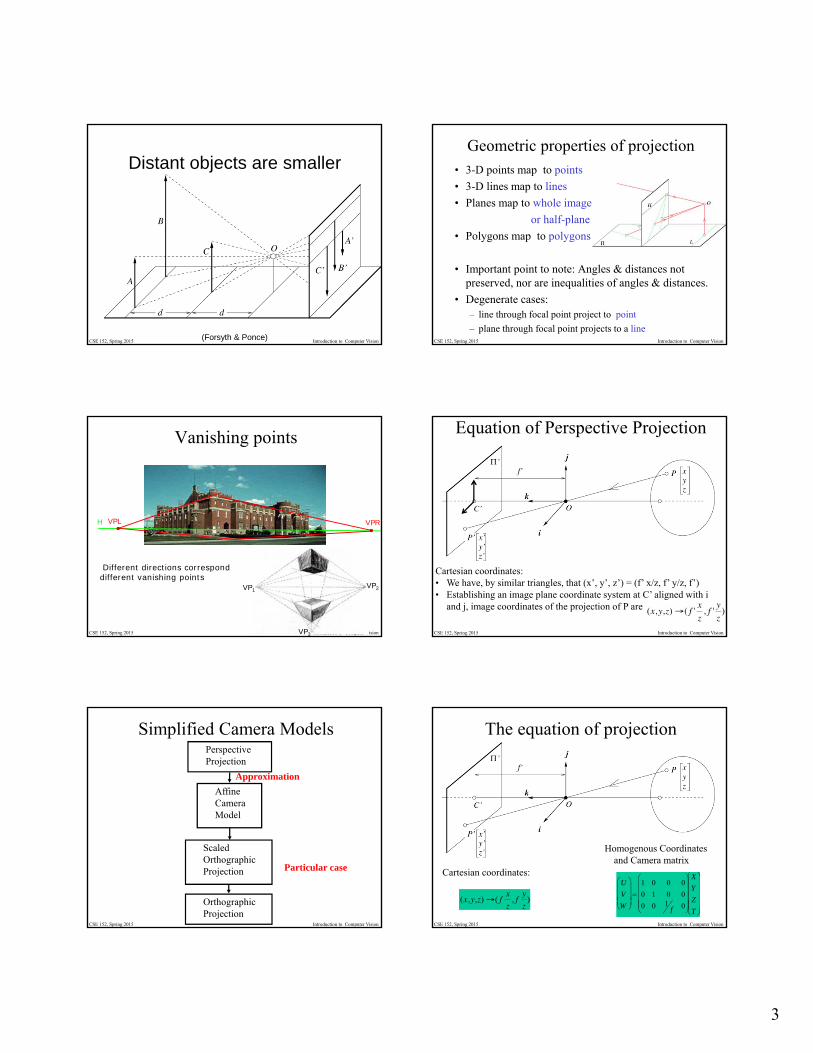
Distant objects are smaller
(Forsyth & Ponce) CSE 152, Spring 2015 Introduction to Computer Vision
Geometric properties of projection• 3-D points map to points
• 3-D lines map to lines
• Planes map to whole image
or half-plane
• Polygons map to polygons
• Important point to note: Angles & distances not preserved, nor are inequalities of angles & distances.
• Degenerate cases:– line through focal point project to point
– plane through focal point projects to a line
CSE 152, Spring 2015 Introduction to Computer Vision
Vanishing points
VPL VPRH
VP1VP2
VP3
Different directions correspond different vanishing points
CSE 152, Spring 2015 Introduction to Computer Vision
Equation of Perspective Projection
Cartesian coordinates:• We have, by similar triangles, that (x’, y’, z’) = (f’ x/z, f’ y/z, f’)• Establishing an image plane coordinate system at C’ aligned with i
and j, image coordinates of the projection of P are
CSE 152, Spring 2015 Introduction to Computer Vision
Simplified Camera ModelsPerspectiveProjection
ScaledOrthographicProjection
AffineCameraModel
OrthographicProjection
Approximation
Particular case
CSE 152, Spring 2015 Introduction to Computer Vision
The equation of projection
Cartesian coordinates:U
V
W
1 0 0 0
0 1 0 0
0 0 1f 0
X
Y
Z
T
Homogenous Coordinates and Camera matrix
4
CSE 152, Spring 2015 Introduction to Computer Vision
Euclidean Coordinate Systems
x OP
.i
y OP
. j
z OP
.k
OP
xi yj zk P xy
z
CSE 152, Spring 2015 Introduction to Computer Vision
3D Rotation Matrices
••• det(R) = 1• , [-1, +1]
• Rows (or columns) of R form a right handed orthonormal coordinate system
• Even though a rotation matrix is 3x3 with nine numbers, it only has three degrees of freedom, it can be parameterized with three numbers. There are many parameterizations
CSE 152, Spring 2015 Introduction to Computer Vision
Composition of Rotations
CSE 152, Spring 2015 Introduction to Computer Vision
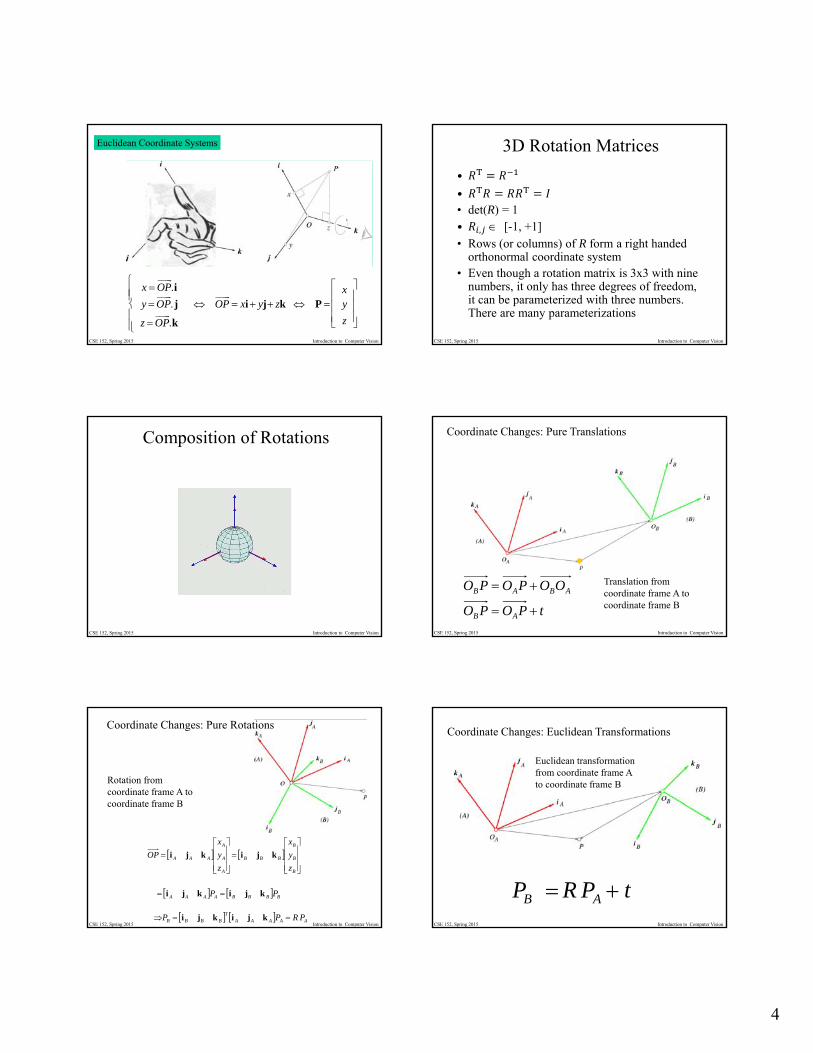
Coordinate Changes: Pure Translations
tPOPO
OOPOPO
AB
ABAB
Translation from coordinate frame A to coordinate frame B
CSE 152, Spring 2015 Introduction to Computer Vision
Coordinate Changes: Pure Rotations
B
B
B
BBB
A
A
A
AAA
z
y
x
z
y
x
OP kjikji
BBBBAAAA PP kjikji
AAAAAT
BBBB PRPP kjikji
Rotation from coordinate frame A to coordinate frame B
CSE 152, Spring 2015 Introduction to Computer Vision
Coordinate Changes: Euclidean Transformations
tPRP AB
Euclidean transformation from coordinate frame A to coordinate frame B
5
CSE 152, Spring 2015 Introduction to Computer Vision
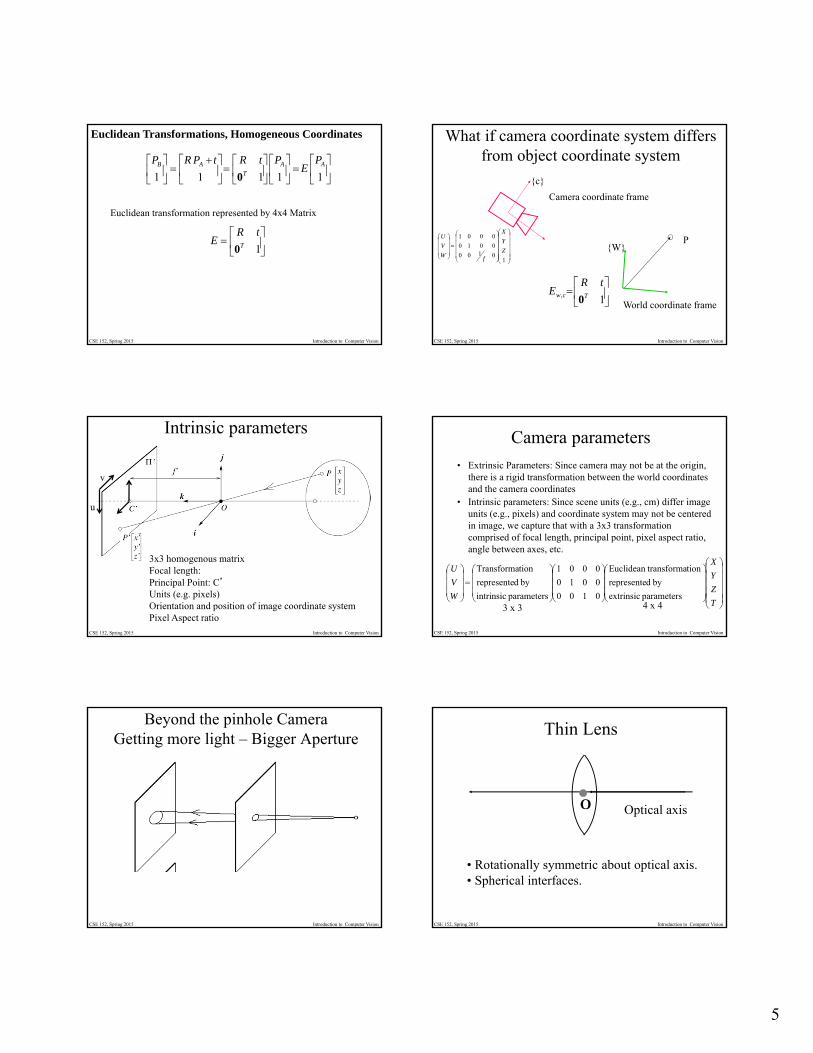
Euclidean Transformations, Homogeneous Coordinates
11111
AAT
AB PE
PtRtPRP
0
Euclidean transformation represented by 4x4 Matrix
1T
tRE
0
CSE 152, Spring 2015 Introduction to Computer Vision
What if camera coordinate system differs from object coordinate system
{c}
P{W}
1, Tcw
tRE
0
10100
0010
0001
Z
Y
X
fW
V
U
Camera coordinate frame
World coordinate frame
CSE 152, Spring 2015 Introduction to Computer Vision
Intrinsic parameters
u
v
3x3 homogenous matrixFocal length:Principal Point: C’Units (e.g. pixels)Orientation and position of image coordinate systemPixel Aspect ratio
CSE 152, Spring 2015 Introduction to Computer Vision
Camera parameters
• Extrinsic Parameters: Since camera may not be at the origin, there is a rigid transformation between the world coordinates and the camera coordinates
• Intrinsic parameters: Since scene units (e.g., cm) differ image units (e.g., pixels) and coordinate system may not be centered in image, we capture that with a 3x3 transformation comprised of focal length, principal point, pixel aspect ratio, angle between axes, etc.
T
Z
Y
X
W
V
U
parameters extrinsic
by drepresente
tiontransformaEuclidean
0100
0010
0001
parameters intrinsic
by drepresente
tionTransforma
3 x 3 4 x 4
CSE 152, Spring 2015 Introduction to Computer Vision
Beyond the pinhole CameraGetting more light – Bigger Aperture
CSE 152, Spring 2015 Introduction to Computer Vision
Thin Lens
O
• Rotationally symmetric about optical axis.• Spherical interfaces.
Optical axis
6
CSE 152, Spring 2015 Introduction to Computer Vision
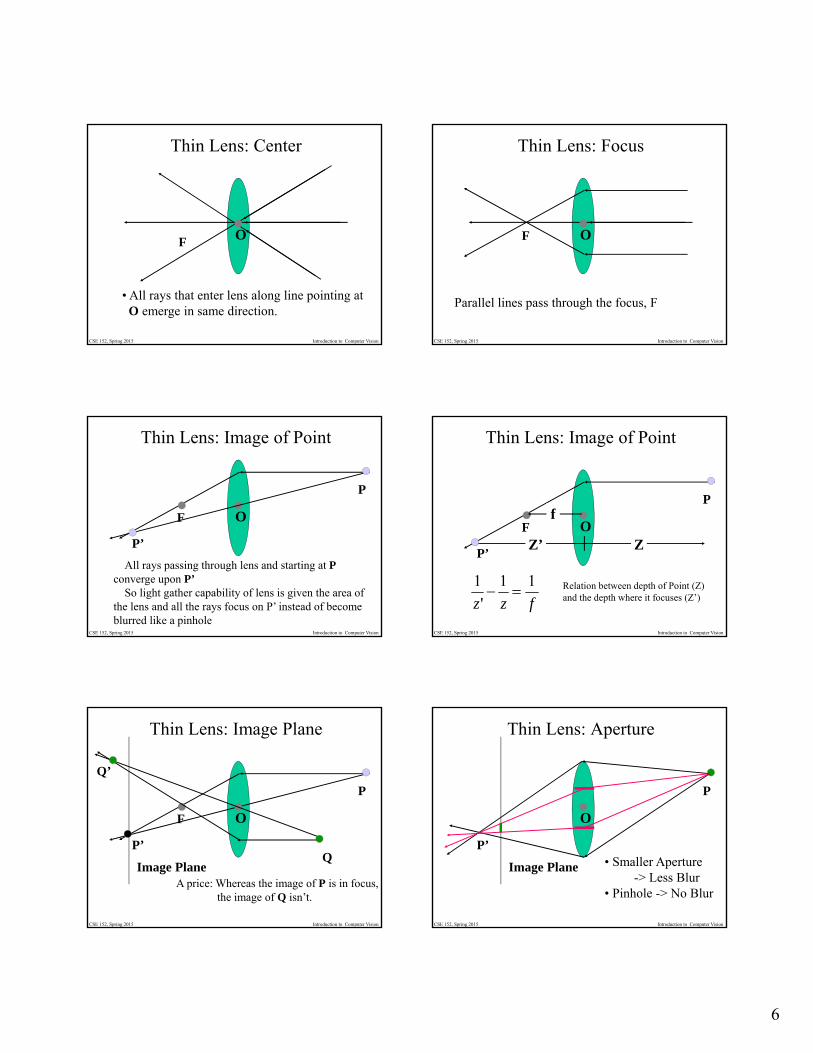
Thin Lens: Center
O
• All rays that enter lens along line pointing at O emerge in same direction.
F
CSE 152, Spring 2015 Introduction to Computer Vision
Thin Lens: Focus
O
Parallel lines pass through the focus, F
F
CSE 152, Spring 2015 Introduction to Computer Vision
Thin Lens: Image of Point
O
All rays passing through lens and starting at Pconverge upon P’
So light gather capability of lens is given the area of the lens and all the rays focus on P’ instead of become blurred like a pinhole
F
P
P’
CSE 152, Spring 2015 Introduction to Computer Vision
Thin Lens: Image of Point
OF
P
P’Z’
f
Z
fzz
11
'
1 Relation between depth of Point (Z)
and the depth where it focuses (Z’)
CSE 152, Spring 2015 Introduction to Computer Vision
Thin Lens: Image Plane
OF
P
P’
Image Plane
Q’
Q
A price: Whereas the image of P is in focus,the image of Q isn’t.
CSE 152, Spring 2015 Introduction to Computer Vision
Thin Lens: Aperture
O
P
P’
Image Plane • Smaller Aperture-> Less Blur
• Pinhole -> No Blur
7
CSE 152, Spring 2015 Introduction to Computer Vision
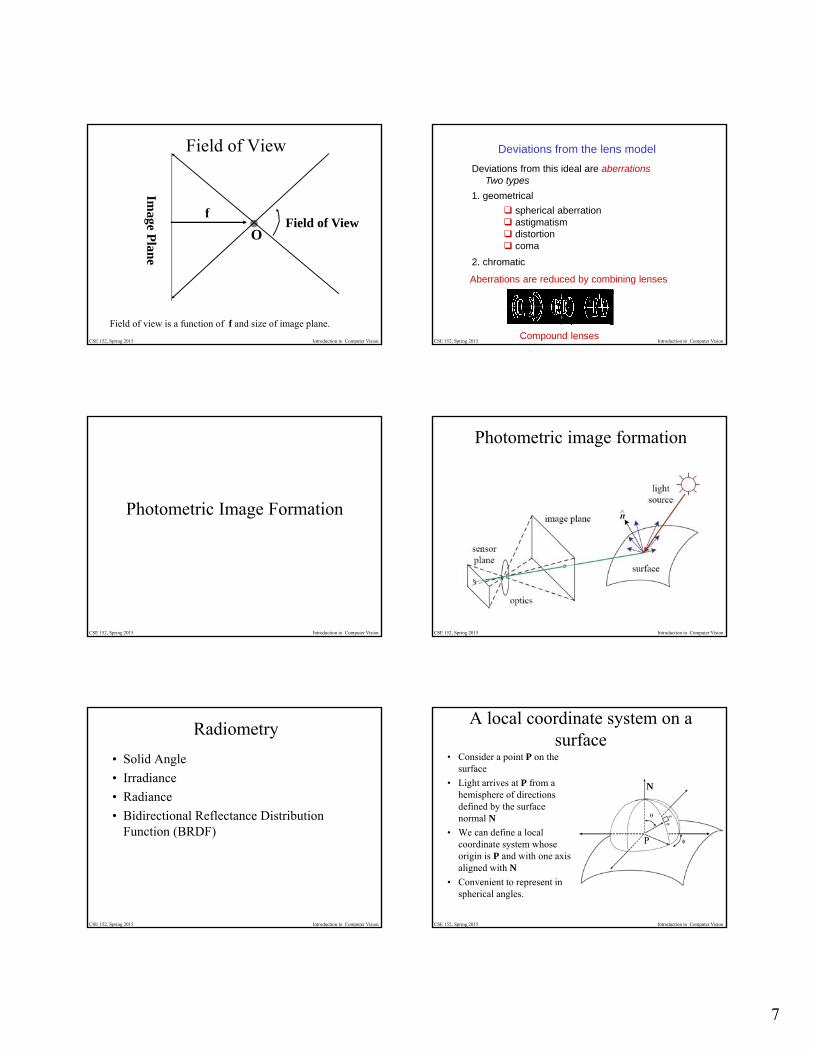
Field of View
OField of View
Image P
lane
f
Field of view is a function of f and size of image plane.
CSE 152, Spring 2015 Introduction to Computer Vision
Deviations from this ideal are aberrationsTwo types
2. chromatic
1. geometrical
spherical aberration astigmatism distortion coma
Aberrations are reduced by combining lenses
Compound lenses
Deviations from the lens model
CSE 152, Spring 2015 Introduction to Computer Vision
Photometric Image Formation
CSE 152, Spring 2015 Introduction to Computer Vision
Photometric image formation
CSE 152, Spring 2015 Introduction to Computer Vision
Radiometry
• Solid Angle
• Irradiance
• Radiance
• Bidirectional Reflectance Distribution Function (BRDF)
CSE 152, Spring 2015 Introduction to Computer Vision
A local coordinate system on a surface
• Consider a point P on the surface
• Light arrives at P from a hemisphere of directions defined by the surface normal N
• We can define a local coordinate system whose origin is P and with one axis aligned with N
• Convenient to represent in spherical angles.
P
N
8
CSE 152, Spring 2015 Introduction to Computer Vision
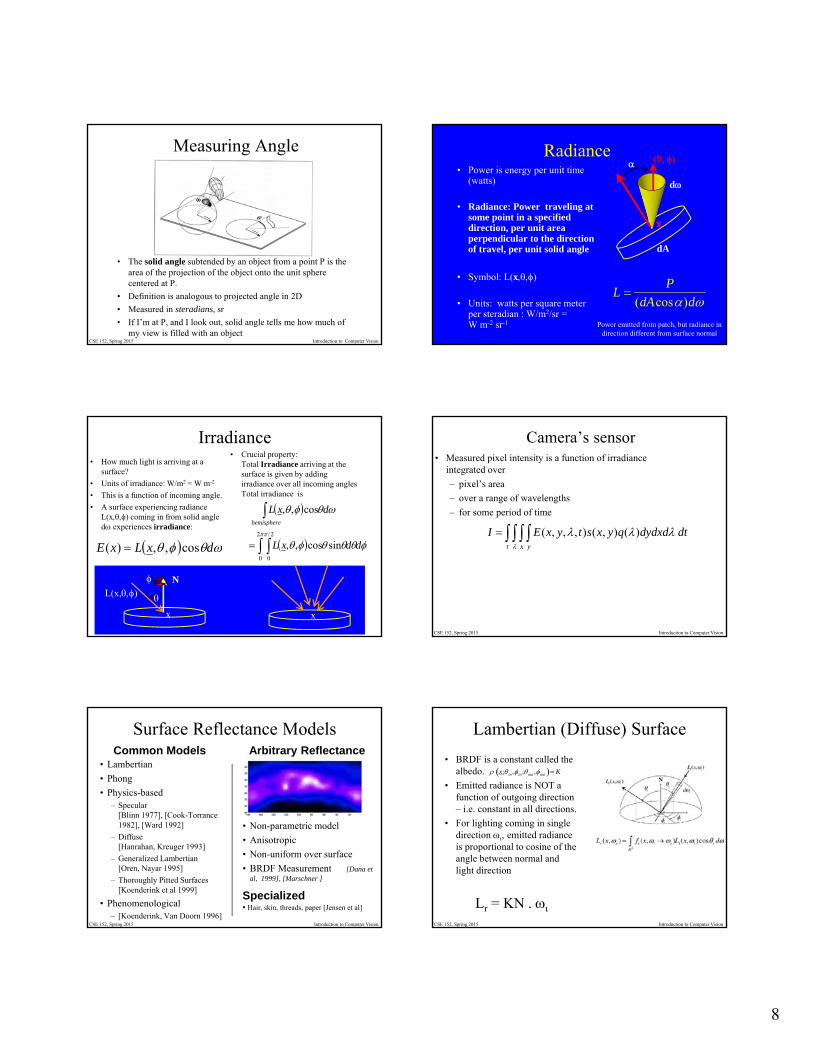
Measuring Angle
• The solid angle subtended by an object from a point P is the area of the projection of the object onto the unit sphere centered at P.
• Definition is analogous to projected angle in 2D
• Measured in steradians, sr
• If I’m at P, and I look out, solid angle tells me how much of my view is filled with an object
Radiance • Power is energy per unit time
(watts)
• Radiance: Power traveling at some point in a specified direction, per unit area perpendicular to the direction of travel, per unit solid angle
• Symbol: L(x
• Units: watts per square meter per steradian : W/m2/sr = W m-2 sr-1
L P
(dAcos)d
x
dA
d
Power emitted from patch, but radiance in direction different from surface normal
Irradiance• How much light is arriving at a
surface?
• Units of irradiance: W/m2 = W m-2
• This is a function of incoming angle.
• A surface experiencing radiance L(x) coming in from solid angle d experiences irradiance:
• Crucial property: Total Irradiance arriving at the surface is given by adding irradiance over all incoming angles Total irradiance is
dxLxE cos,,)(
2
0
2/
0
sincos,,
cos,,
ddxL
dxLhemisphere
NL(x,
x x
CSE 152, Spring 2015 Introduction to Computer Vision
Camera’s sensor• Measured pixel intensity is a function of irradiance
integrated over
– pixel’s area
– over a range of wavelengths
– for some period of time
t x y
dtdydxdqyxstyxEI
)(),(),,,(
CSE 152, Spring 2015 Introduction to Computer Vision
Surface Reflectance Models
• Lambertian
• Phong
• Physics-based– Specular
[Blinn 1977], [Cook-Torrance 1982], [Ward 1992]
– Diffuse [Hanrahan, Kreuger 1993]
– Generalized Lambertian [Oren, Nayar 1995]
– Thoroughly Pitted Surfaces [Koenderink et al 1999]
• Phenomenological– [Koenderink, Van Doorn 1996]
Common Models Arbitrary Reflectance
• Non-parametric model
• Anisotropic
• Non-uniform over surface
• BRDF Measurement [Dana et al, 1999], [Marschner ]
Specialized• Hair, skin, threads, paper [Jensen et al]
CSE 152, Spring 2015 Introduction to Computer Vision
Lambertian (Diffuse) Surface
• BRDF is a constant called the albedo.
• Emitted radiance is NOT a function of outgoing direction – i.e. constant in all directions.
• For lighting coming in single direction , emitted radiance is proportional to cosine of the angle between normal and light direction
Lr = KN .
x; in, in;out,out K
9
CSE 152, Spring 2015 Introduction to Computer Vision CSE 152, Spring 2015 Introduction to Computer Vision
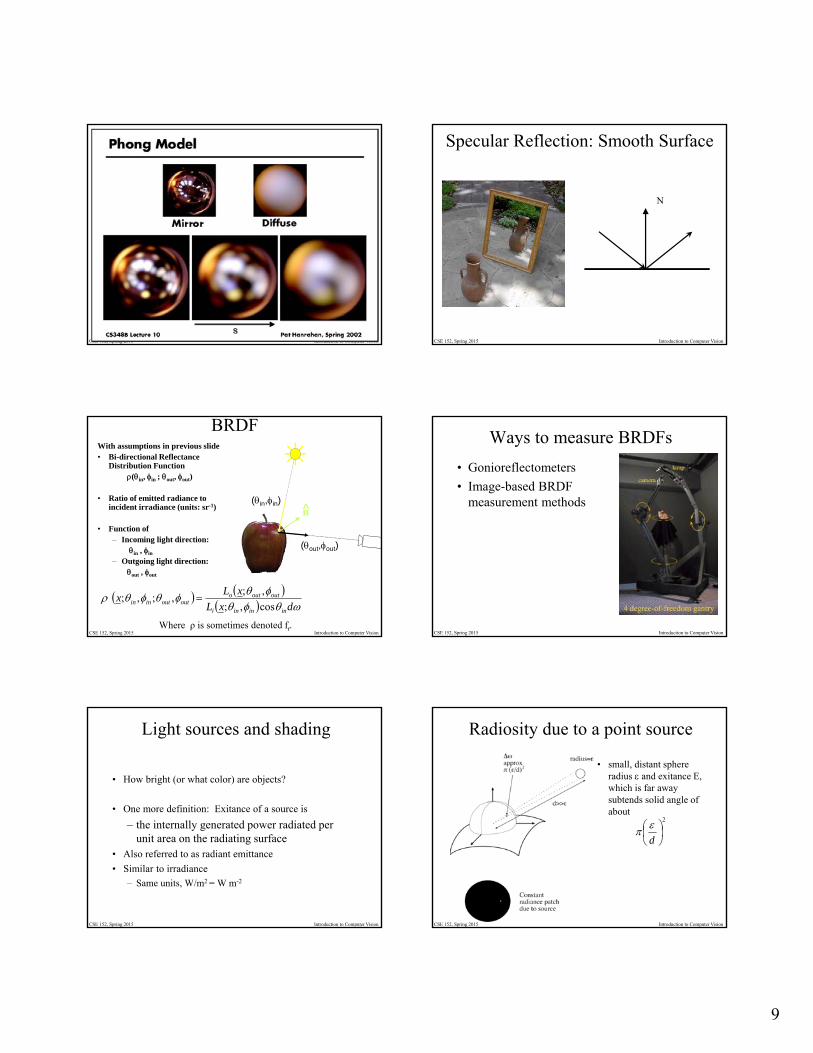
Specular Reflection: Smooth Surface
N
CSE 152, Spring 2015 Introduction to Computer Vision
BRDFWith assumptions in previous slide• Bi-directional Reflectance
Distribution Function (in, in ; out, out)
• Ratio of emitted radiance to incident irradiance (units: sr-1)
• Function of– Incoming light direction:
in , in
– Outgoing light direction: out , out
dxL
xLx
ininini
outoutooutoutinin cos,;
,;,;,;
n(in,in)
(out,out)
Where ρ is sometimes denoted fr.CSE 152, Spring 2015 Introduction to Computer Vision
Ways to measure BRDFs
• Gonioreflectometers
• Image-based BRDF measurement methods
CSE 152, Spring 2015 Introduction to Computer Vision
Light sources and shading
• How bright (or what color) are objects?
• One more definition: Exitance of a source is
– the internally generated power radiated per unit area on the radiating surface
• Also referred to as radiant emittance
• Similar to irradiance
– Same units, W/m2 = W m-2
CSE 152, Spring 2015 Introduction to Computer Vision
Radiosity due to a point source
• small, distant sphere radius and exitance E, which is far away subtends solid angle of about
2
d
10
CSE 152, Spring 2015 Introduction to Computer Vision
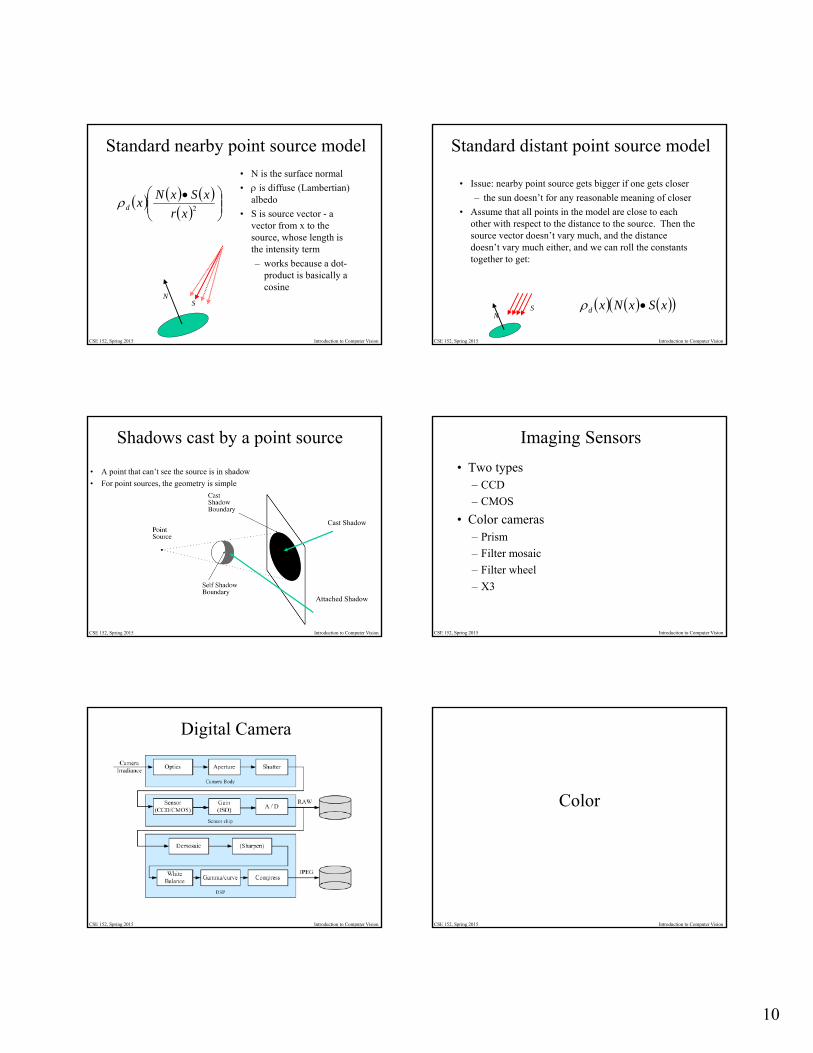
Standard nearby point source model
• N is the surface normal
• is diffuse (Lambertian) albedo
• S is source vector - a vector from x to the source, whose length is the intensity term
– works because a dot-product is basically a cosine
2xr
xSxNxd
NS
CSE 152, Spring 2015 Introduction to Computer Vision
Standard distant point source model
• Issue: nearby point source gets bigger if one gets closer
– the sun doesn’t for any reasonable meaning of closer
• Assume that all points in the model are close to each other with respect to the distance to the source. Then the source vector doesn’t vary much, and the distance doesn’t vary much either, and we can roll the constants together to get:
xSxNxd N
S
CSE 152, Spring 2015 Introduction to Computer Vision
Shadows cast by a point source
• A point that can’t see the source is in shadow
• For point sources, the geometry is simple
Cast Shadow
Attached Shadow
CSE 152, Spring 2015 Introduction to Computer Vision
Imaging Sensors
• Two types– CCD
– CMOS
• Color cameras– Prism
– Filter mosaic
– Filter wheel
– X3
CSE 152, Spring 2015 Introduction to Computer Vision
Digital Camera
CSE 152, Spring 2015 Introduction to Computer Vision
Color
11
CSE 152, Spring 2015 Introduction to Computer Vision
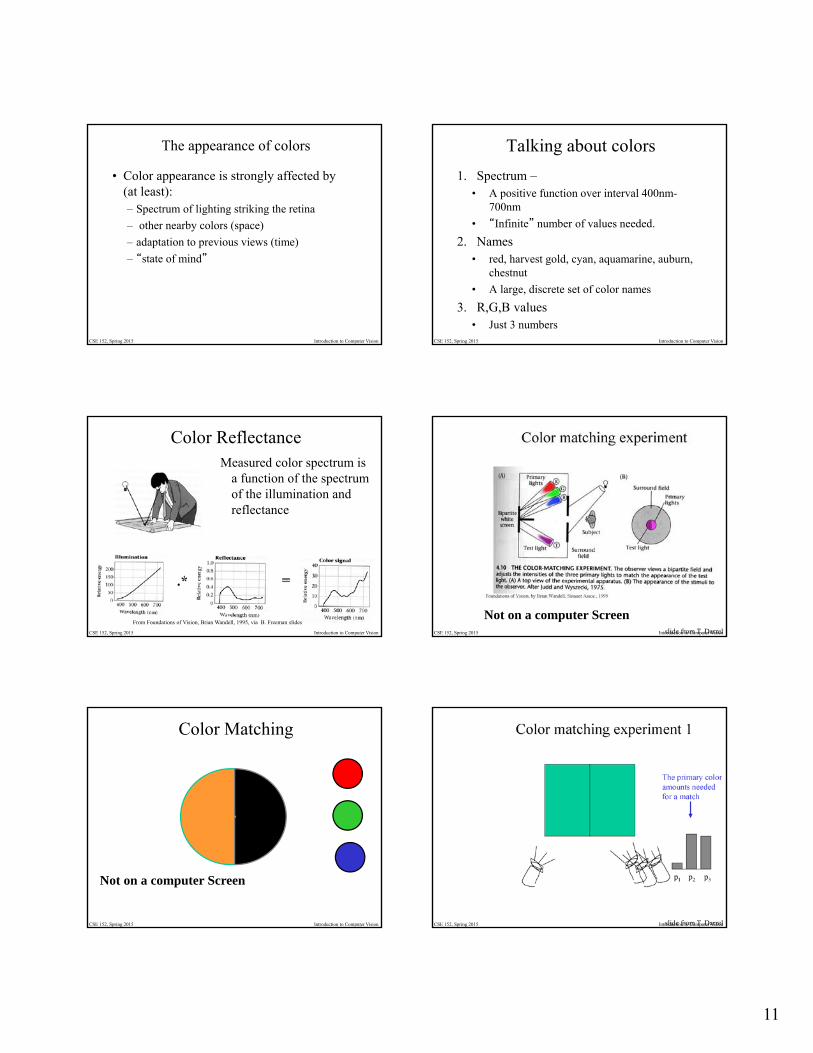
The appearance of colors
• Color appearance is strongly affected by (at least):– Spectrum of lighting striking the retina
– other nearby colors (space)
– adaptation to previous views (time)
– “state of mind”
CSE 152, Spring 2015 Introduction to Computer Vision
Talking about colors
1. Spectrum –• A positive function over interval 400nm-
700nm
• “Infinite” number of values needed.
2. Names • red, harvest gold, cyan, aquamarine, auburn,
chestnut
• A large, discrete set of color names
3. R,G,B values • Just 3 numbers
CSE 152, Spring 2015 Introduction to Computer Vision
Color ReflectanceMeasured color spectrum is
a function of the spectrum of the illumination and reflectance
From Foundations of Vision, Brian Wandell, 1995, via B. Freeman slides
CSE 152, Spring 2015 Introduction to Computer Visionslide from T. Darrel
Not on a computer Screen
CSE 152, Spring 2015 Introduction to Computer Vision
Color Matching
Not on a computer Screen
CSE 152, Spring 2015 Introduction to Computer Visionslide from T. Darrel
12
CSE 152, Spring 2015 Introduction to Computer Visionslide from T. Darrel CSE 152, Spring 2015 Introduction to Computer Vision
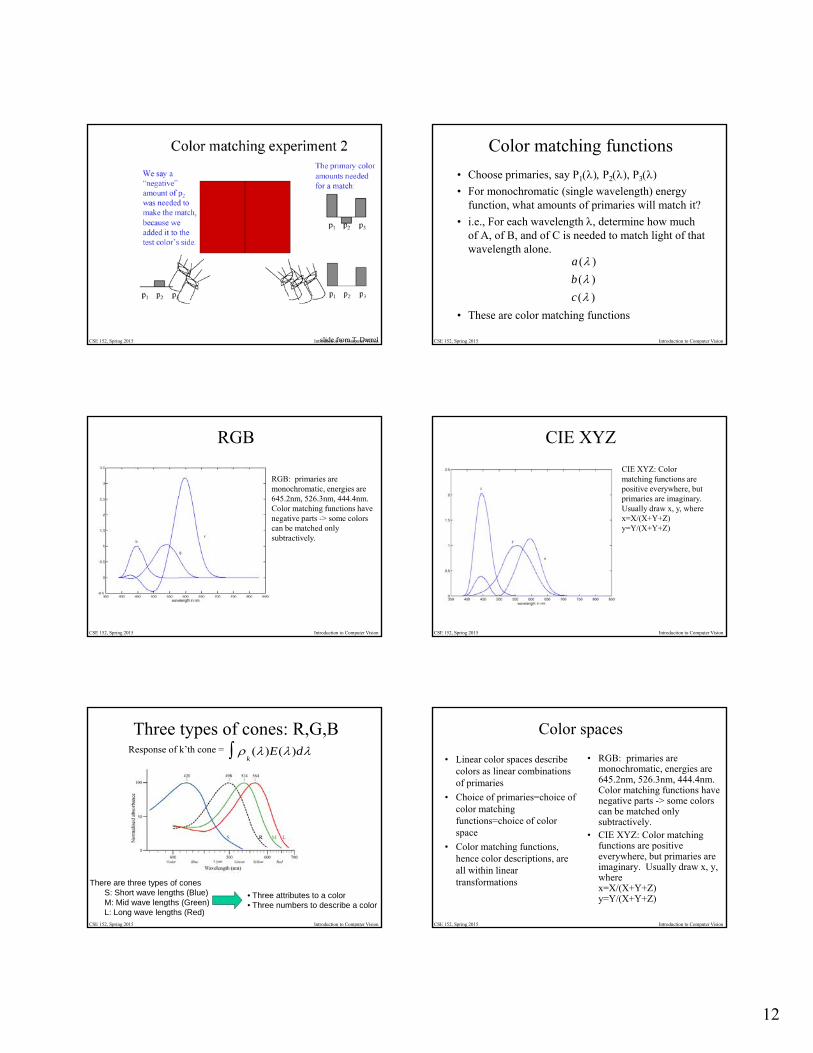
Color matching functions
• Choose primaries, say P1 P2, P3• For monochromatic (single wavelength) energy
function, what amounts of primaries will match it?
• i.e., For each wavelength , determine how much of A, of B, and of C is needed to match light of that wavelength alone.
• These are color matching functions
)(
)(
)(
c
b
a
CSE 152, Spring 2015 Introduction to Computer Vision
RGB: primaries are monochromatic, energies are 645.2nm, 526.3nm, 444.4nm. Color matching functions have negative parts -> some colors can be matched only subtractively.
RGB
CSE 152, Spring 2015 Introduction to Computer Vision
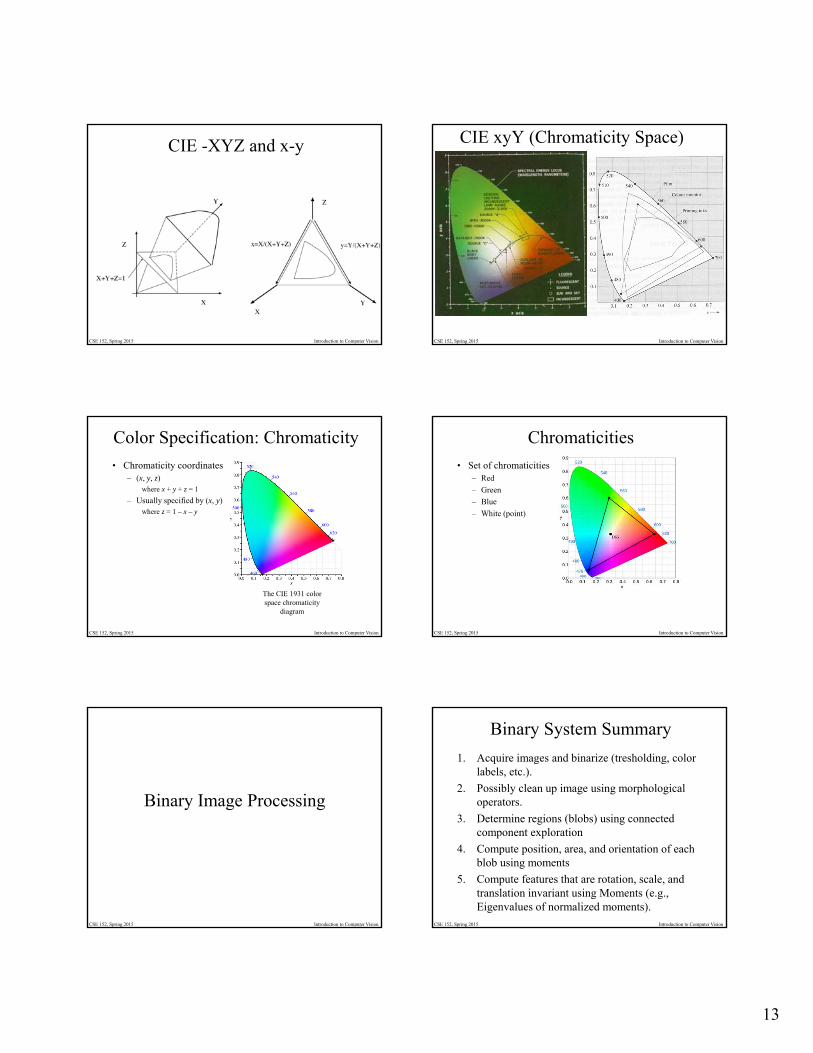
CIE XYZ: Color matching functions are positive everywhere, but primaries are imaginary. Usually draw x, y, where x=X/(X+Y+Z)y=Y/(X+Y+Z)
CIE XYZ
CSE 152, Spring 2015 Introduction to Computer Vision
Three types of cones: R,G,B
There are three types of conesS: Short wave lengths (Blue)M: Mid wave lengths (Green)L: Long wave lengths (Red)
• Three attributes to a color• Three numbers to describe a color
Response of k’th cone = k()E()d
CSE 152, Spring 2015 Introduction to Computer Vision
Color spaces
• Linear color spaces describe colors as linear combinations of primaries
• Choice of primaries=choice of color matching functions=choice of color space
• Color matching functions, hence color descriptions, are all within linear transformations
• RGB: primaries are monochromatic, energies are 645.2nm, 526.3nm, 444.4nm. Color matching functions have negative parts -> some colors can be matched only subtractively.
• CIE XYZ: Color matching functions are positive everywhere, but primaries are imaginary. Usually draw x, y, wherex=X/(X+Y+Z)y=Y/(X+Y+Z)
13
CSE 152, Spring 2015 Introduction to Computer Vision
CIE -XYZ and x-y
CSE 152, Spring 2015 Introduction to Computer Vision
CIE xyY (Chromaticity Space)
CSE 152, Spring 2015 Introduction to Computer Vision
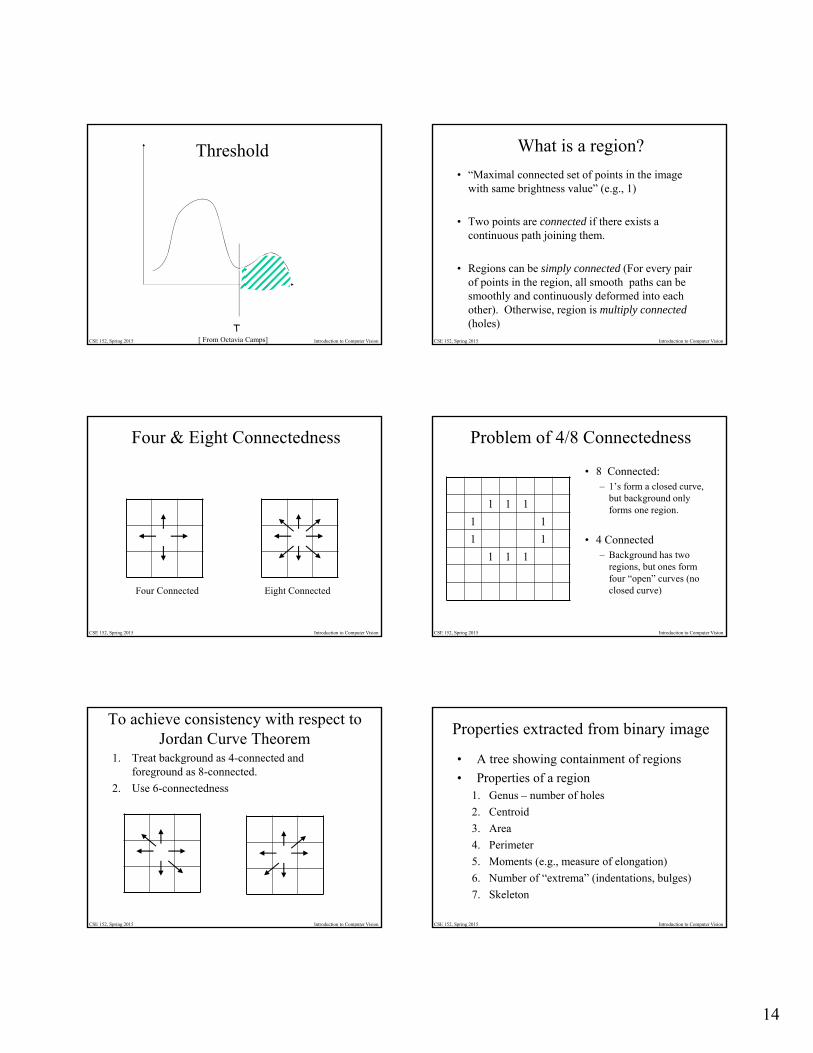
Color Specification: Chromaticity
• Chromaticity coordinates– (x, y, z)
where x + y + z = 1
– Usually specified by (x, y)where z = 1 – x – y
The CIE 1931 color space chromaticity
diagram
CSE 152, Spring 2015 Introduction to Computer Vision
Chromaticities
• Set of chromaticities– Red
– Green
– Blue
– White (point)
CSE 152, Spring 2015 Introduction to Computer Vision
Binary Image Processing
CSE 152, Spring 2015 Introduction to Computer Vision
Binary System Summary
1. Acquire images and binarize (tresholding, color labels, etc.).
2. Possibly clean up image using morphological operators.
3. Determine regions (blobs) using connected component exploration
4. Compute position, area, and orientation of each blob using moments
5. Compute features that are rotation, scale, and translation invariant using Moments (e.g., Eigenvalues of normalized moments).
14
CSE 152, Spring 2015 Introduction to Computer Vision
Threshold
T[ From Octavia Camps] CSE 152, Spring 2015 Introduction to Computer Vision
What is a region?
• “Maximal connected set of points in the image with same brightness value” (e.g., 1)
• Two points are connected if there exists a continuous path joining them.
• Regions can be simply connected (For every pair of points in the region, all smooth paths can be smoothly and continuously deformed into each other). Otherwise, region is multiply connected(holes)
CSE 152, Spring 2015 Introduction to Computer Vision
Four & Eight Connectedness
Eight ConnectedFour Connected
CSE 152, Spring 2015 Introduction to Computer Vision
Problem of 4/8 Connectedness
1 1 1
1 1
1 1
1 1 1
• 8 Connected:– 1’s form a closed curve,
but background only forms one region.
• 4 Connected– Background has two
regions, but ones form four “open” curves (no closed curve)
CSE 152, Spring 2015 Introduction to Computer Vision
To achieve consistency with respect to Jordan Curve Theorem
1. Treat background as 4-connected and foreground as 8-connected.
2. Use 6-connectedness
CSE 152, Spring 2015 Introduction to Computer Vision
Properties extracted from binary image
• A tree showing containment of regions
• Properties of a region1. Genus – number of holes
2. Centroid
3. Area
4. Perimeter
5. Moments (e.g., measure of elongation)
6. Number of “extrema” (indentations, bulges)
7. Skeleton

15
CSE 152, Spring 2015 Introduction to Computer Vision
Moments
1 0
Given a pair of non-negative integers (j,k) the discrete (j,k)th moment of S is defined as:
B(x,y)
n
x
m
y
kjjk yxyxBM
1 1
),(
• Fast way to implement computation over n by m image or window• One object
The region S is defined as:
B
CSE 152, Spring 2015 Introduction to Computer Vision
Filtering
CSE 152, Spring 2015 Introduction to Computer Vision
Image Filtering
Input Output
Filter
CSE 152, Spring 2015 Introduction to Computer Vision
(Freeman)
CSE 152, Spring 2015 Introduction to Computer Vision
Linear Filters
• General process:– Form new image whose pixels
are a weighted sum of original pixel values, using the same set of weights at each point.
• Properties– Output is a linear function of
the input
– Output is a shift-invariant function of the input (i.e. shift the input image two pixels to the left, the output is shifted two pixels to the left)
• Example: smoothing by averaging– form the average of pixels in a
neighborhood
• Example: smoothing with a Gaussian– form a weighted average of
pixels in a neighborhood
• Example: finding a derivative– form a difference of pixels in a
neighborhood
CSE 152, Spring 2015 Introduction to Computer Vision
Properties of Continuous Convolution(Holds for discrete too)
Let f,g,h be images and * denote convolution
• Commutative: f*g=g*f
• Associative: f*(g*h)=(f*g)*h
• Linear: for scalars a & b and images f,g,h(af+bg)*h=a(f*h)+b(g*h)
• Differentiation rule
x
gfg
x
fgf
x
**)*(
dudvvugvyuxfyxgf ),(),(),(*
16
CSE 152, Spring 2015 Introduction to Computer Vision
Fourier Transform
• 1-D transform (signal processing)
• 2-D transform (image processing)
• Consider 1-DTime domain Frequency Domain
Real Complex
• Consider time domain signal to be expressed as weighted sum of sinusoid. A sinusoid cos(ut+) is characterized by its phase and its frequency u
• The Fourier transform of the signal is a function giving the weights (and phase) as a function of frequency u.
CSE 152, Spring 2015 Introduction to Computer Vision
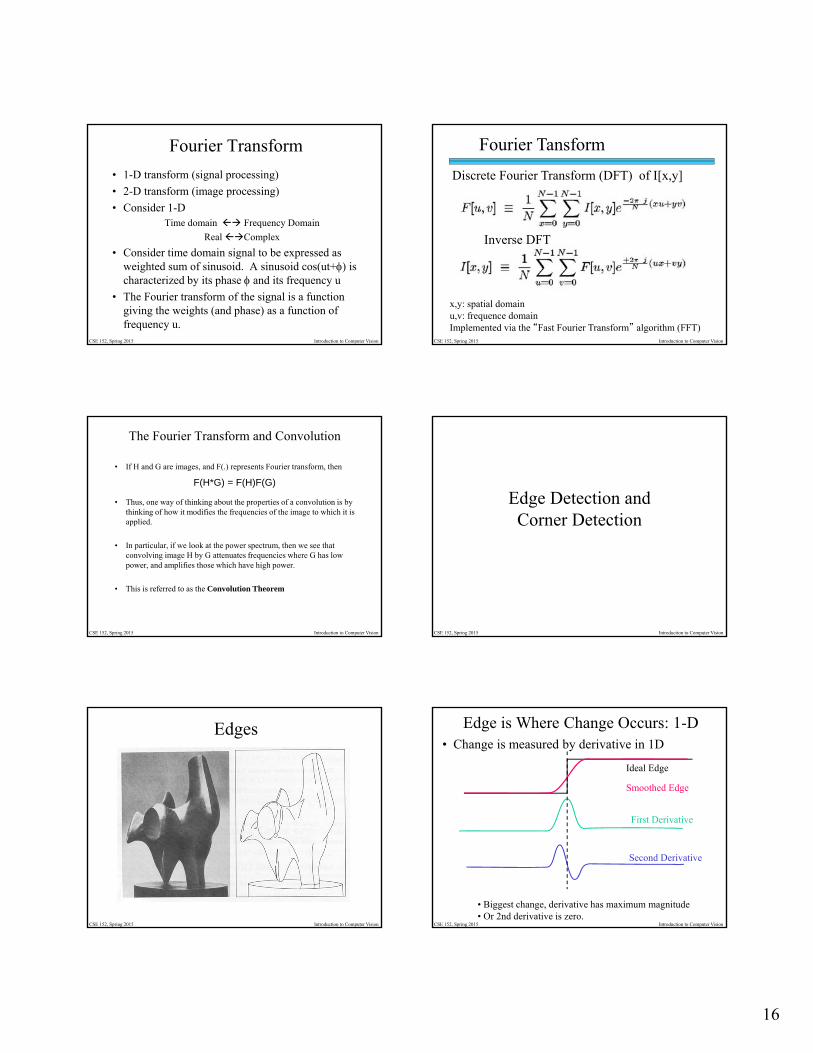
Fourier Tansform
Discrete Fourier Transform (DFT) of I[x,y]
Inverse DFT
x,y: spatial domainu,v: frequence domainImplemented via the “Fast Fourier Transform” algorithm (FFT)
CSE 152, Spring 2015 Introduction to Computer Vision
The Fourier Transform and Convolution
• If H and G are images, and F(.) represents Fourier transform, then
• Thus, one way of thinking about the properties of a convolution is by thinking of how it modifies the frequencies of the image to which it is applied.
• In particular, if we look at the power spectrum, then we see that convolving image H by G attenuates frequencies where G has low power, and amplifies those which have high power.
• This is referred to as the Convolution Theorem
F(H*G) = F(H)F(G)
CSE 152, Spring 2015 Introduction to Computer Vision
Edge Detection andCorner Detection
CSE 152, Spring 2015 Introduction to Computer Vision
Edges
CSE 152, Spring 2015 Introduction to Computer Vision
Edge is Where Change Occurs: 1-D• Change is measured by derivative in 1D
Smoothed Edge
First Derivative
Second Derivative
Ideal Edge
• Biggest change, derivative has maximum magnitude• Or 2nd derivative is zero.
17
CSE 152, Spring 2015 Introduction to Computer Vision
Numerical Derivativesf(x)
xX0 X0+hX0-h
Take Taylor series expansion of f(x) about x0
f(x) = f(x0)+f’(x0)(x-x0) + ½ f’’(x0)(x-x0)2 + …
Consider samples taken at increments of h and first two terms of the expansion, we have
f(x0+h) = f(x0)+f’(x0)h+ ½ f’’(x0)h2
f(x0-h) = f(x0)-f’(x0)h+ ½ f’’(x0)h2
Subtracting and adding f(x0+h) and f(x0-h) respectively yields
2
00
0
)()(2)()(''
2
)()()('
00
00
h
hxfxfhxfxf
h
hxfhxfxf
Convolve with
First Derivative: [-1/2h 0 1/2h]Second Derivative: [1/h2 -2/h2 1/h2]
CSE 152, Spring 2015 Introduction to Computer Vision
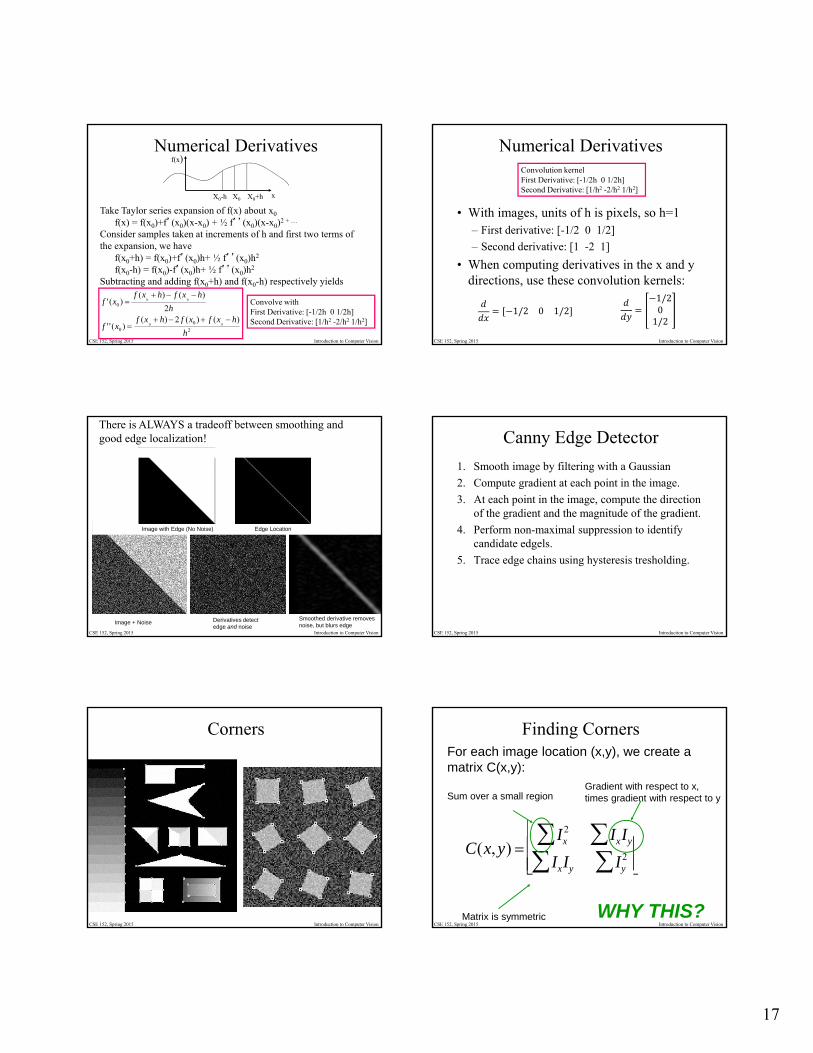
Numerical Derivatives
• With images, units of h is pixels, so h=1– First derivative: [-1/2 0 1/2]
– Second derivative: [1 -2 1]
• When computing derivatives in the x and y directions, use these convolution kernels:
Convolution kernelFirst Derivative: [-1/2h 0 1/2h]Second Derivative: [1/h2 -2/h2 1/h2]
1/201/2
1/2 0 1/2
CSE 152, Spring 2015 Introduction to Computer Vision
There is ALWAYS a tradeoff between smoothing and good edge localization!
Image with Edge (No Noise) Edge Location
Image + Noise Derivatives detect edge and noise
Smoothed derivative removes noise, but blurs edge
CSE 152, Spring 2015 Introduction to Computer Vision
Canny Edge Detector
1. Smooth image by filtering with a Gaussian
2. Compute gradient at each point in the image.
3. At each point in the image, compute the direction of the gradient and the magnitude of the gradient.
4. Perform non-maximal suppression to identify candidate edgels.
5. Trace edge chains using hysteresis tresholding.
CSE 152, Spring 2015 Introduction to Computer Vision
Corners
CSE 152, Spring 2015 Introduction to Computer Vision
Finding Corners
C(x, y) Ix
2 IxIyIxIy Iy
2
For each image location (x,y), we create a matrix C(x,y):
Sum over a small regionGradient with respect to x, times gradient with respect to y
Matrix is symmetric WHY THIS?
18
CSE 152, Spring 2015 Introduction to Computer Vision
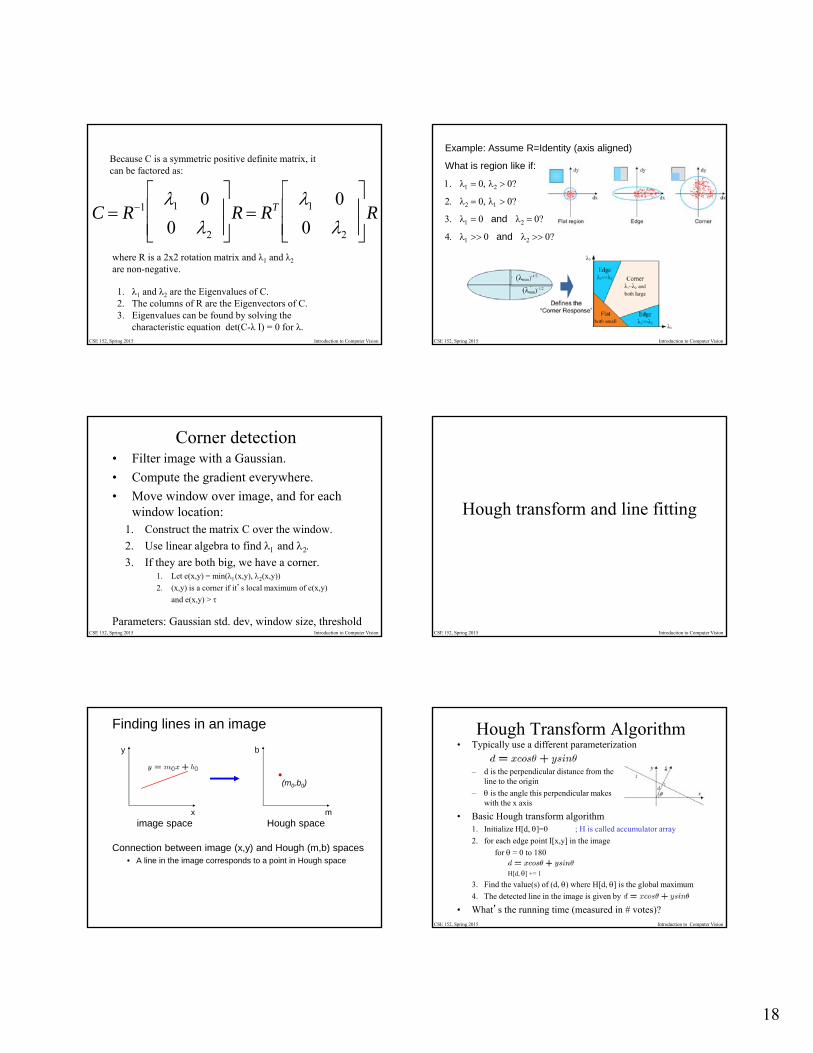
Because C is a symmetric positive definite matrix, it can be factored as:
C R1 1 0
0 2
R RT 1 0
0 2
R
where R is a 2x2 rotation matrix and λ1 and λ2
are non-negative.
1. λ1 and λ2 are the Eigenvalues of C. 2. The columns of R are the Eigenvectors of C.3. Eigenvalues can be found by solving the
characteristic equation det(C-λ I) = 0 for λ.CSE 152, Spring 2015 Introduction to Computer Vision
Example: Assume R=Identity (axis aligned)
What is region like if:
and
and
CSE 152, Spring 2015 Introduction to Computer Vision
Corner detection• Filter image with a Gaussian.
• Compute the gradient everywhere.
• Move window over image, and for each window location:
1. Construct the matrix C over the window.
2. Use linear algebra to find and 3. If they are both big, we have a corner.
1. Let e(x,y) = min((x,y), (x,y)2. (x,y) is a corner if it’s local maximum of e(x,y)
and e(x,y) >
Parameters: Gaussian std. dev, window size, threshold CSE 152, Spring 2015 Introduction to Computer Vision
Hough transform and line fitting
Finding lines in an image
Connection between image (x,y) and Hough (m,b) spaces• A line in the image corresponds to a point in Hough space
x
y
m
b
(m0,b0)
image space Hough space
CSE 152, Spring 2015 Introduction to Computer Vision
• Typically use a different parameterization
– d is the perpendicular distance from the line to the origin
– is the angle this perpendicular makes with the x axis
• Basic Hough transform algorithm1. Initialize H[d, ]=0 ; H is called accumulator array
2. for each edge point I[x,y] in the image
for = 0 to 180
H[d, ] += 1
3. Find the value(s) of (d, ) where H[d, ] is the global maximum
4. The detected line in the image is given by
• What’s the running time (measured in # votes)?
Hough Transform Algorithm
19
CSE 152, Spring 2015 Introduction to Computer Vision
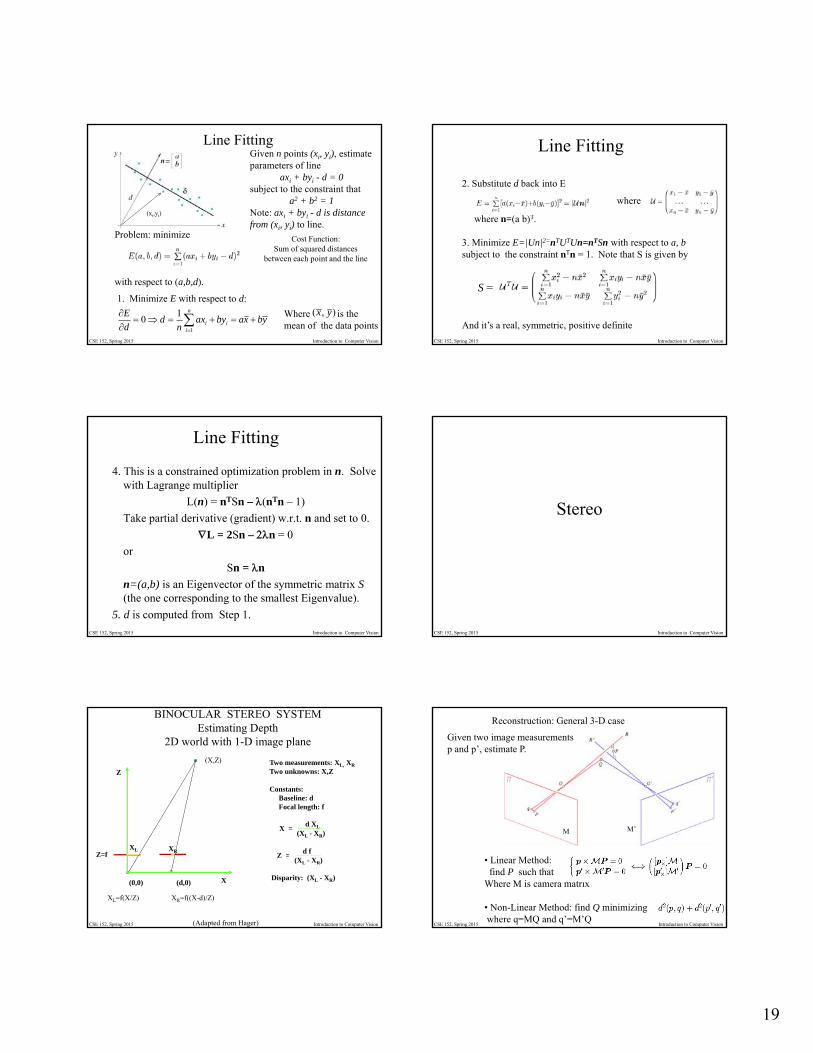
Line FittingGiven n points (xi, yi), estimate parameters of line
axi + byi - d = 0subject to the constraint that
a2 + b2 = 1Note: axi + byi - d is distance from (xi, yi) to line.
) ,( yx1. Minimize E with respect to d:
Where is themean of the data points
ybxabyaxn
dd
E n
iii
1
10
Problem: minimize
with respect to (a,b,d).
Cost Function:Sum of squared distances
between each point and the line
(xi,yi)
CSE 152, Spring 2015 Introduction to Computer Vision
Line Fitting
2. Substitute d back into E
where n=(a b)T.
3. Minimize E=|Un|2=nTUTUn=nTSn with respect to a, bsubject to the constraint nTn = 1. Note that S is given by
And it’s a real, symmetric, positive definite
where
S =
CSE 152, Spring 2015 Introduction to Computer Vision
Line Fitting
4. This is a constrained optimization problem in n. Solve with Lagrange multiplier
L(n) = nTSn – (nTn – 1)
Take partial derivative (gradient) w.r.t. n and set to 0.
L = 2Sn – n = 0
or
Sn = n
n=(a,b) is an Eigenvector of the symmetric matrix S(the one corresponding to the smallest Eigenvalue).
5. d is computed from Step 1.
CSE 152, Spring 2015 Introduction to Computer Vision
Stereo
CSE 152, Spring 2015 Introduction to Computer Vision
BINOCULAR STEREO SYSTEMEstimating Depth
2D world with 1-D image plane
Two measurements: XL, XR
Two unknowns: X,Z
Constants:Baseline: dFocal length: f
Disparity: (XL - XR)
Z = d f
(XL - XR)
X = d XL
(XL - XR)
(Adapted from Hager)
Z
X(0,0) (d,0)
Z=f
(X,Z)
XL XR
XL=f(X/Z) XR=f((X-d)/Z)
CSE 152, Spring 2015 Introduction to Computer Vision
Reconstruction: General 3-D case
• Linear Method: find P such that
Where M is camera matrix
• Non-Linear Method: find Q minimizingwhere q=MQ and q’=M’Q
Given two image measurements p and p’, estimate P.
M M’
20
CSE 152, Spring 2015 Introduction to Computer Vision
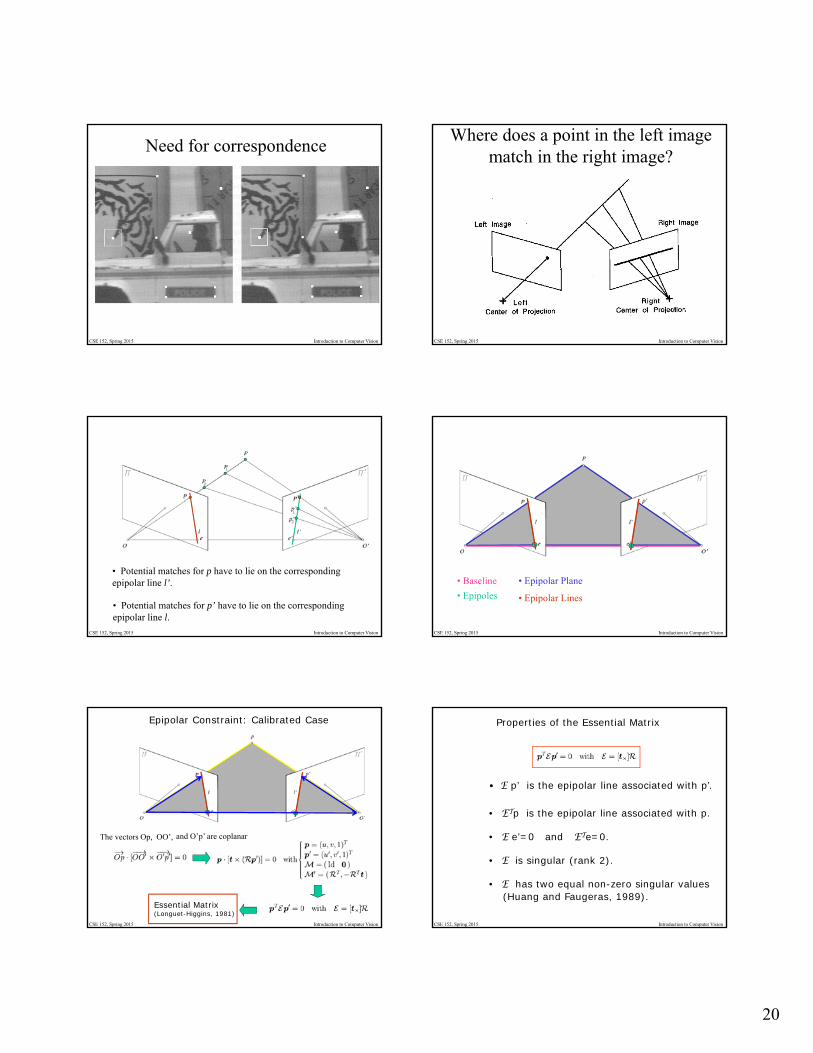
Need for correspondence
Truco Fig. 7.5
CSE 152, Spring 2015 Introduction to Computer Vision
Where does a point in the left image match in the right image?
Nalwa Fig. 7.5
CSE 152, Spring 2015 Introduction to Computer Vision
Epipolar Constraint
• Potential matches for p have to lie on the corresponding epipolar line l’.
• Potential matches for p’ have to lie on the corresponding epipolar line l.
CSE 152, Spring 2015 Introduction to Computer Vision
Epipolar Geometry
• Epipolar Plane
• Epipoles • Epipolar Lines
• Baseline
CSE 152, Spring 2015 Introduction to Computer Vision
Epipolar Constraint: Calibrated Case
Essential Matrix(Longuet-Higgins, 1981)
The vectors Op, OO’, and O’p’ are coplanar
CSE 152, Spring 2015 Introduction to Computer Vision
Properties of the Essential Matrix
• E p’ is the epipolar line associated with p’.
• ETp is the epipolar line associated with p.
• E e’=0 and ETe=0.
• E is singular (rank 2).
• E has two equal non-zero singular values(Huang and Faugeras, 1989).
T
T
21
CSE 152, Spring 2015 Introduction to Computer Vision
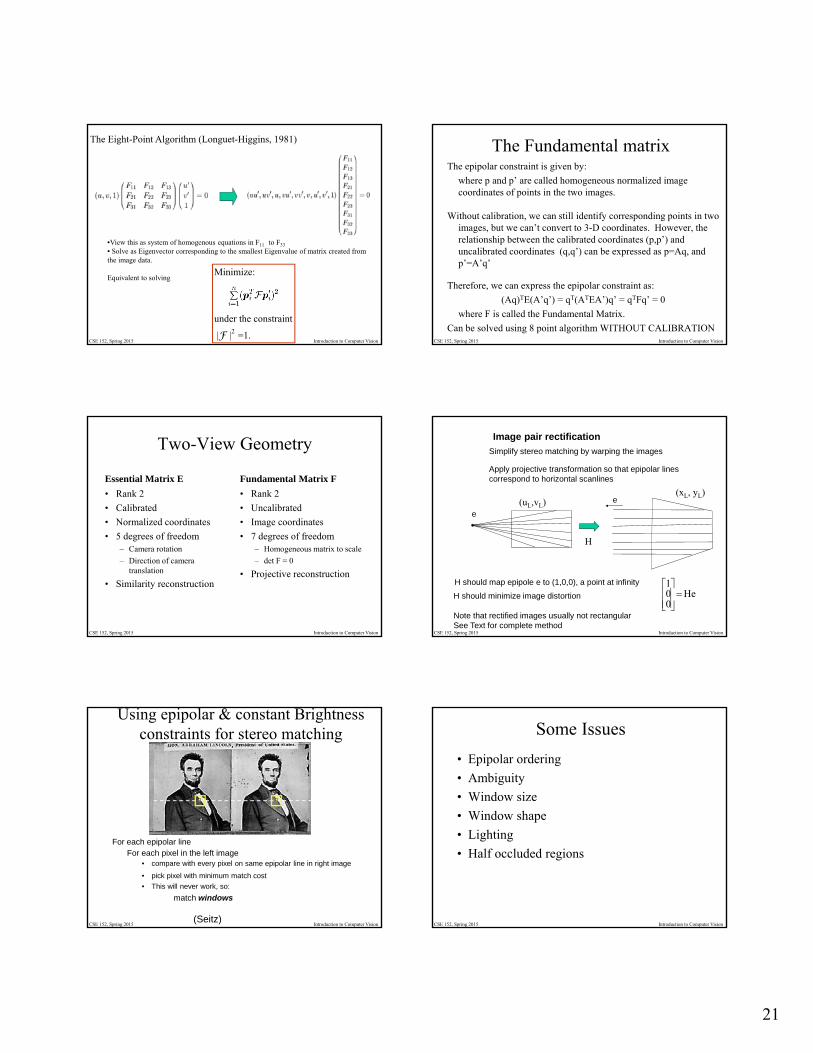
The Eight-Point Algorithm (Longuet-Higgins, 1981)
•View this as system of homogenous equations in F11 to F33
• Solve as Eigenvector corresponding to the smallest Eigenvalue of matrix created from the image data.
Equivalent to solving
|F | =1.
Minimize:
under the constraint2
CSE 152, Spring 2015 Introduction to Computer Vision
The Fundamental matrixThe epipolar constraint is given by:
where p and p’ are called homogeneous normalized image coordinates of points in the two images.
Without calibration, we can still identify corresponding points in two images, but we can’t convert to 3-D coordinates. However, the relationship between the calibrated coordinates (p,p’) and uncalibrated coordinates (q,q’) can be expressed as p=Aq, and p’=A’q’
Therefore, we can express the epipolar constraint as:
(Aq)TE(A’q’) = qT(ATEA’)q’ = qTFq’ = 0
where F is called the Fundamental Matrix.
Can be solved using 8 point algorithm WITHOUT CALIBRATION
CSE 152, Spring 2015 Introduction to Computer Vision
Two-View Geometry
Essential Matrix E
• Rank 2
• Calibrated
• Normalized coordinates
• 5 degrees of freedom– Camera rotation
– Direction of camera translation
• Similarity reconstruction
Fundamental Matrix F
• Rank 2
• Uncalibrated
• Image coordinates
• 7 degrees of freedom– Homogeneous matrix to scale
– det F = 0
• Projective reconstruction
CSE 152, Spring 2015 Introduction to Computer Vision
Image pair rectification
Simplify stereo matching by warping the images
Apply projective transformation so that epipolar linescorrespond to horizontal scanlines
e
H should map epipole e to (1,0,0), a point at infinity
H should minimize image distortion
Note that rectified images usually not rectangularSee Text for complete method
He001
(uL,vL) e(xL, yL)
H
CSE 152, Spring 2015 Introduction to Computer Vision
Using epipolar & constant Brightness constraints for stereo matching
For each epipolar lineFor each pixel in the left image
• compare with every pixel on same epipolar line in right image
• pick pixel with minimum match cost
• This will never work, so:
match windows
(Seitz)CSE 152, Spring 2015 Introduction to Computer Vision
Some Issues
• Epipolar ordering
• Ambiguity
• Window size
• Window shape
• Lighting
• Half occluded regions
22
CSE 152, Spring 2015 Introduction to Computer Vision
Photometric Stereo
CSE 152, Spring 2015 Introduction to Computer Vision
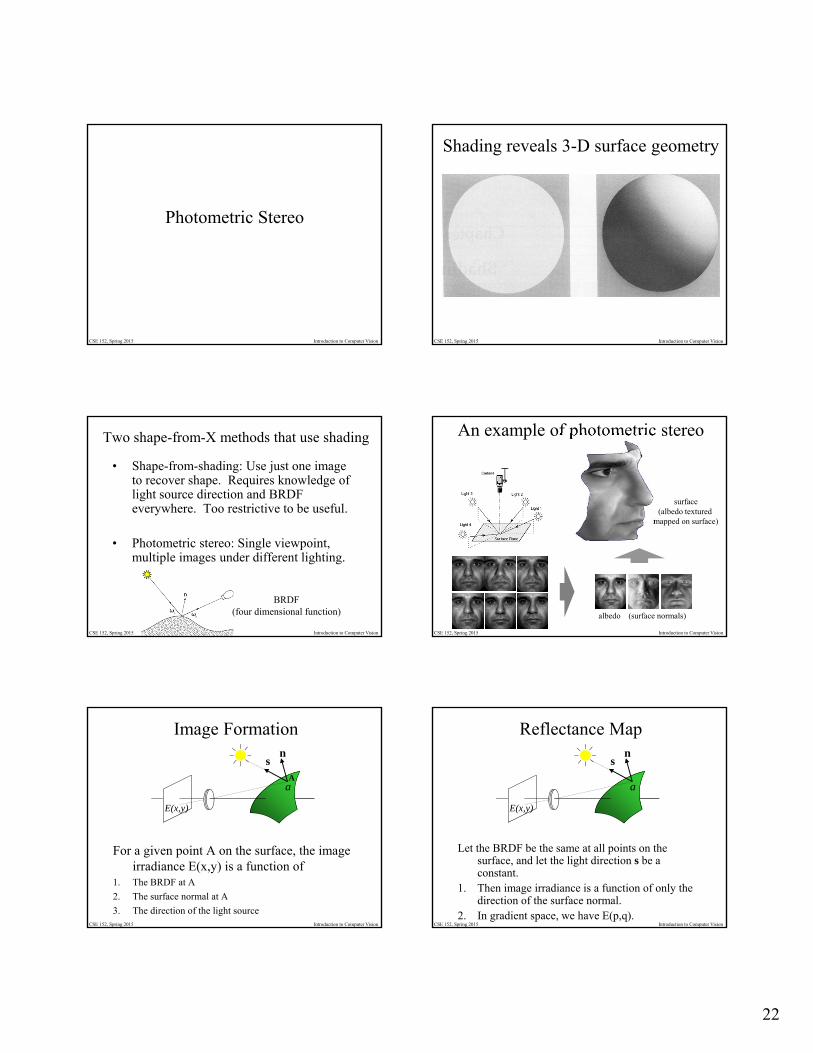
Shading reveals 3-D surface geometry
CSE 152, Spring 2015 Introduction to Computer Vision
Two shape-from-X methods that use shading
• Shape-from-shading: Use just one image to recover shape. Requires knowledge of light source direction and BRDF everywhere. Too restrictive to be useful.
• Photometric stereo: Single viewpoint, multiple images under different lighting.
BRDF(four dimensional function)
CSE 152, Spring 2015 Introduction to Computer Vision
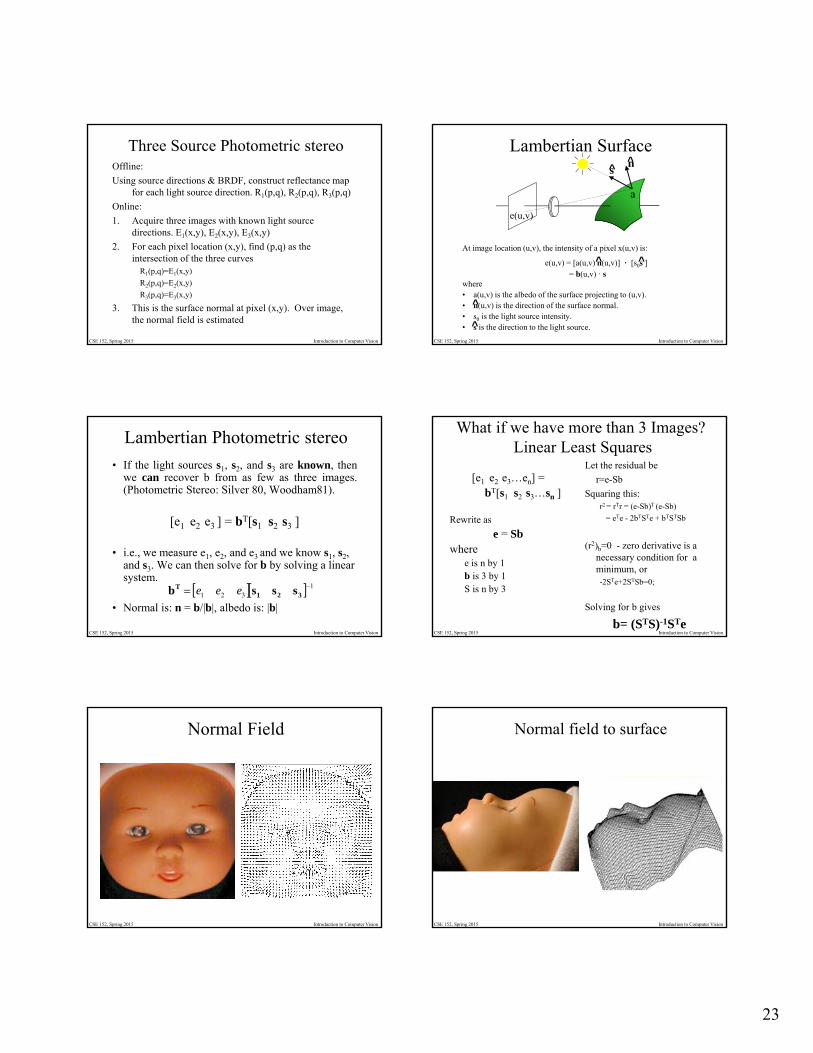
An example of photometric stereo
albedo (surface normals)
surface(albedo textured
mapped on surface)
CSE 152, Spring 2015 Introduction to Computer Vision
Image Formation
For a given point A on the surface, the image irradiance E(x,y) is a function of
1. The BRDF at A
2. The surface normal at A
3. The direction of the light source
ns
a
E(x,y)
A
CSE 152, Spring 2015 Introduction to Computer Vision
Reflectance Map
Let the BRDF be the same at all points on the surface, and let the light direction s be a constant.
1. Then image irradiance is a function of only the direction of the surface normal.
2. In gradient space, we have E(p,q).
ns
a
E(x,y)
23
CSE 152, Spring 2015 Introduction to Computer Vision
Three Source Photometric stereoOffline:
Using source directions & BRDF, construct reflectance map for each light source direction. R1(p,q), R2(p,q), R3(p,q)
Online:
1. Acquire three images with known light source directions. E1(x,y), E2(x,y), E3(x,y)
2. For each pixel location (x,y), find (p,q) as the intersection of the three curves
R1(p,q)=E1(x,y)
R2(p,q)=E2(x,y)
R3(p,q)=E3(x,y)
3. This is the surface normal at pixel (x,y). Over image, the normal field is estimated
CSE 152, Spring 2015 Introduction to Computer Vision
Lambertian Surface
At image location (u,v), the intensity of a pixel x(u,v) is:
e(u,v) = [a(u,v) n(u,v)] · [s0s ]= b(u,v) · s
where• a(u,v) is the albedo of the surface projecting to (u,v).• n(u,v) is the direction of the surface normal.• s0 is the light source intensity.• s is the direction to the light source.
ns
^ ^
a
e(u,v)
^
^
CSE 152, Spring 2015 Introduction to Computer Vision
Lambertian Photometric stereo
• If the light sources s1, s2, and s3 are known, thenwe can recover b from as few as three images.(Photometric Stereo: Silver 80, Woodham81).
[e1 e2 e3 ] = bT[s1 s2 s3 ]
• i.e., we measure e1, e2, and e3 and we know s1, s2, and s3. We can then solve for b by solving a linear system.
• Normal is: n = b/|b|, albedo is: |b|
1321
321T sssb eee
CSE 152, Spring 2015 Introduction to Computer Vision
What if we have more than 3 Images?Linear Least Squares
[e1 e2 e3…en] =bT[s1 s2 s3…sn ]
Rewrite as
e = Sb where
e is n by 1b is 3 by 1S is n by 3
Let the residual be
r=e-Sb
Squaring this: r2 = rTr = (e-Sb)T (e-Sb)
= eTe - 2bTSTe + bTSTSb
(r2)b=0 - zero derivative is a necessary condition for a minimum, or-2STe+2STSb=0;
Solving for b gives
b= (STS)-1STe
CSE 152, Spring 2015 Introduction to Computer Vision
Normal Field
CSE 152, Spring 2015 Introduction to Computer Vision
Normal field to surface
24
CSE 152, Spring 2015 Introduction to Computer Vision
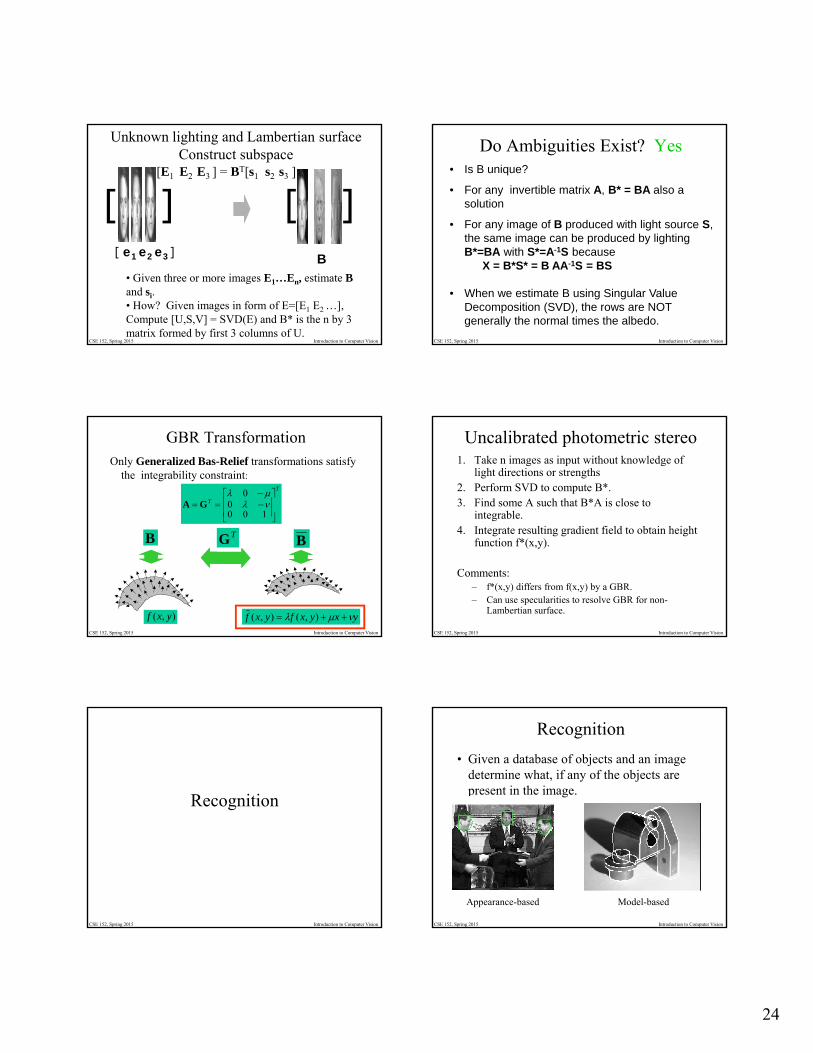
Unknown lighting and Lambertian surfaceConstruct subspace
[ ] [ ][ e1 e2 e3 ] B
• Given three or more images E1…En, estimate Band si.• How? Given images in form of E=[E1 E2 …], Compute [U,S,V] = SVD(E) and B* is the n by 3 matrix formed by first 3 columns of U.
[E1 E2 E3 ] = BT[s1 s2 s3 ]
CSE 152, Spring 2015 Introduction to Computer Vision
Do Ambiguities Exist? Yes• Is B unique?
• For any invertible matrix A, B* = BA also a solution
• For any image of B produced with light source S, the same image can be produced by lighting B*=BA with S*=A-1S because
X = B*S* = B AA-1S = BS
• When we estimate B using Singular Value Decomposition (SVD), the rows are NOT generally the normal times the albedo.
CSE 152, Spring 2015 Introduction to Computer Vision
GBR TransformationOnly Generalized Bas-Relief transformations satisfy
the integrability constraint:T
T
100
00
GA
B TG B
),( yxf yxyxfyxf ),(),(CSE 152, Spring 2015 Introduction to Computer Vision
Uncalibrated photometric stereo1. Take n images as input without knowledge of
light directions or strengths2. Perform SVD to compute B*.3. Find some A such that B*A is close to
integrable.4. Integrate resulting gradient field to obtain height
function f*(x,y).
Comments:– f*(x,y) differs from f(x,y) by a GBR.– Can use specularities to resolve GBR for non-
Lambertian surface.
CSE 152, Spring 2015 Introduction to Computer Vision
Recognition
CSE 152, Spring 2015 Introduction to Computer Vision
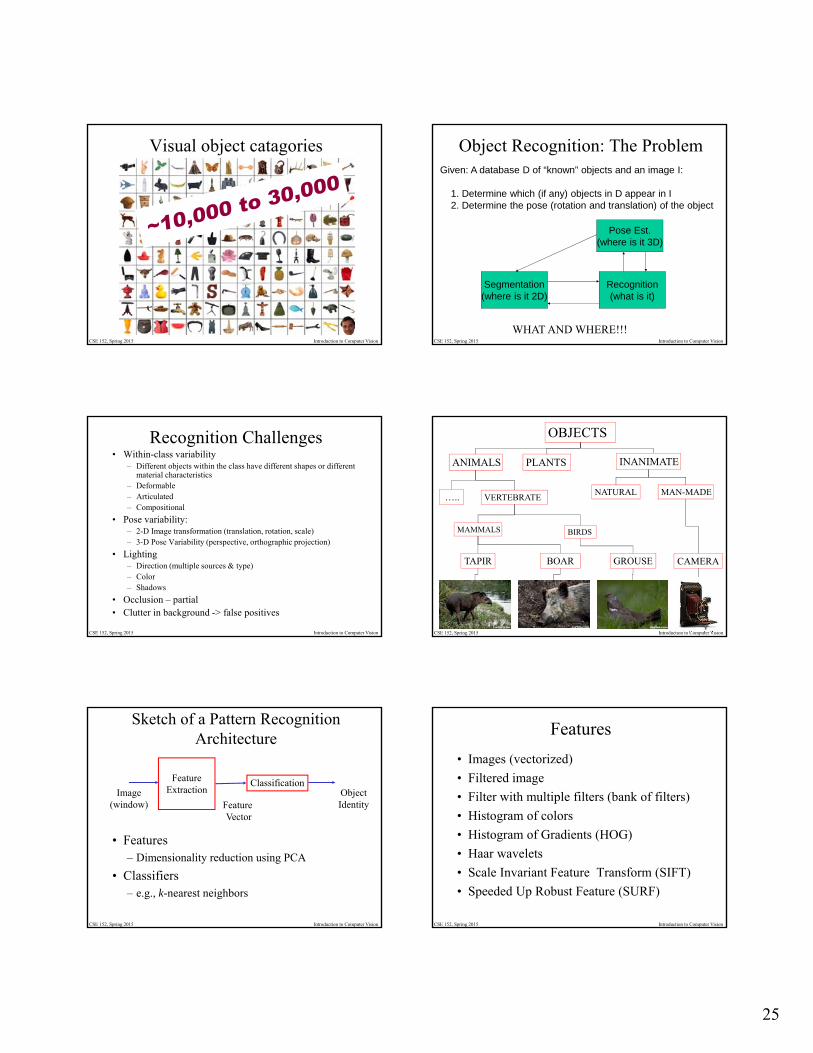
Recognition
• Given a database of objects and an image determine what, if any of the objects are present in the image.
Appearance-based Model-based
25
CSE 152, Spring 2015 Introduction to Computer Vision
Visual object catagories
CSE 152, Spring 2015 Introduction to Computer Vision
Object Recognition: The ProblemGiven: A database D of “known” objects and an image I:
1. Determine which (if any) objects in D appear in I2. Determine the pose (rotation and translation) of the object
Segmentation(where is it 2D)
Recognition(what is it)
Pose Est.(where is it 3D)
WHAT AND WHERE!!!
CSE 152, Spring 2015 Introduction to Computer Vision
Recognition Challenges• Within-class variability
– Different objects within the class have different shapes or different material characteristics
– Deformable– Articulated– Compositional
• Pose variability: – 2-D Image transformation (translation, rotation, scale)– 3-D Pose Variability (perspective, orthographic projection)
• Lighting– Direction (multiple sources & type)– Color– Shadows
• Occlusion – partial• Clutter in background -> false positives
CSE 152, Spring 2015 Introduction to Computer Vision
OBJECTS
ANIMALS INANIMATEPLANTS
MAN-MADENATURALVERTEBRATE…..
MAMMALS BIRDS
GROUSEBOARTAPIR CAMERA
CSE 152, Spring 2015 Introduction to Computer Vision
Sketch of a Pattern Recognition Architecture
• Features– Dimensionality reduction using PCA
• Classifiers– e.g., k-nearest neighbors
FeatureExtraction
ClassificationImage
(window)ObjectIdentityFeature
Vector
CSE 152, Spring 2015 Introduction to Computer Vision
Features
• Images (vectorized)
• Filtered image
• Filter with multiple filters (bank of filters)
• Histogram of colors
• Histogram of Gradients (HOG)
• Haar wavelets
• Scale Invariant Feature Transform (SIFT)
• Speeded Up Robust Feature (SURF)
26
CSE 152, Spring 2015 Introduction to Computer Vision
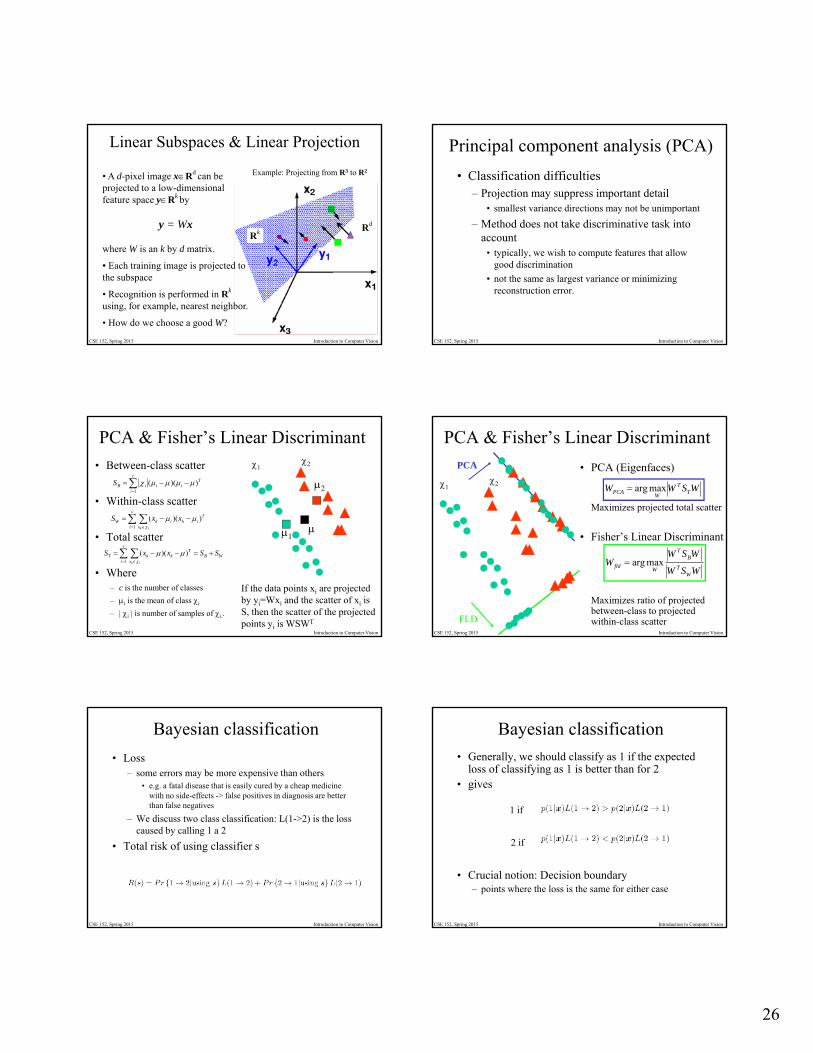
Linear Subspaces & Linear Projection
• A d-pixel image xRd can be projected to a low-dimensional feature space yRk by
y = Wx
where W is an k by d matrix.
• Each training image is projected to the subspace
• Recognition is performed in Rk
using, for example, nearest neighbor.
• How do we choose a good W?
Example: Projecting from R3 to R2
Rk Rd
CSE 152, Spring 2015 Introduction to Computer Vision
Principal component analysis (PCA)
• Classification difficulties– Projection may suppress important detail
• smallest variance directions may not be unimportant
– Method does not take discriminative task into account
• typically, we wish to compute features that allow good discrimination
• not the same as largest variance or minimizing reconstruction error.
CSE 152, Spring 2015 Introduction to Computer Vision
PCA & Fisher’s Linear Discriminant
• Between-class scatter
• Within-class scatter
• Total scatter
• Where– c is the number of classes
– i is the mean of class i
– | i | is number of samples of i..
Tii
c
iiBS ))((
1
c
i x
TikikW
ik
xxS1
))((
WB
c
i x
TkkT SSxxS
ik
1
))((
1
2
12
If the data points xi are projected by yi=Wxi and the scatter of xi is S, then the scatter of the projected points yi is WSWT
CSE 152, Spring 2015 Introduction to Computer Vision
PCA & Fisher’s Linear Discriminant
• PCA (Eigenfaces)
Maximizes projected total scatter
• Fisher’s Linear Discriminant
Maximizes ratio of projected between-class to projected within-class scatter
WSWW TT
WPCA maxarg
WSW
WSWW
WT
BT
Wfld maxarg
12
PCA
FLD
CSE 152, Spring 2015 Introduction to Computer Vision
Bayesian classification
• Loss– some errors may be more expensive than others
• e.g. a fatal disease that is easily cured by a cheap medicine with no side-effects -> false positives in diagnosis are better than false negatives
– We discuss two class classification: L(1->2) is the loss caused by calling 1 a 2
• Total risk of using classifier s
CSE 152, Spring 2015 Introduction to Computer Vision
Bayesian classification
• Generally, we should classify as 1 if the expected loss of classifying as 1 is better than for 2
• gives
• Crucial notion: Decision boundary– points where the loss is the same for either case
1 if
2 if
27
CSE 152, Spring 2015 Introduction to Computer Vision
• Classifier boils down to: choose class that
minimizes:
x, k 2 2 log k
where
x, k x
k T 1 x k
12
because covariance is common, this simplifies to sign ofa linear expression (i.e. Voronoi diagram in 2D for =I)
Mahalanobis distance
CSE 152, Spring 2015 Introduction to Computer Vision
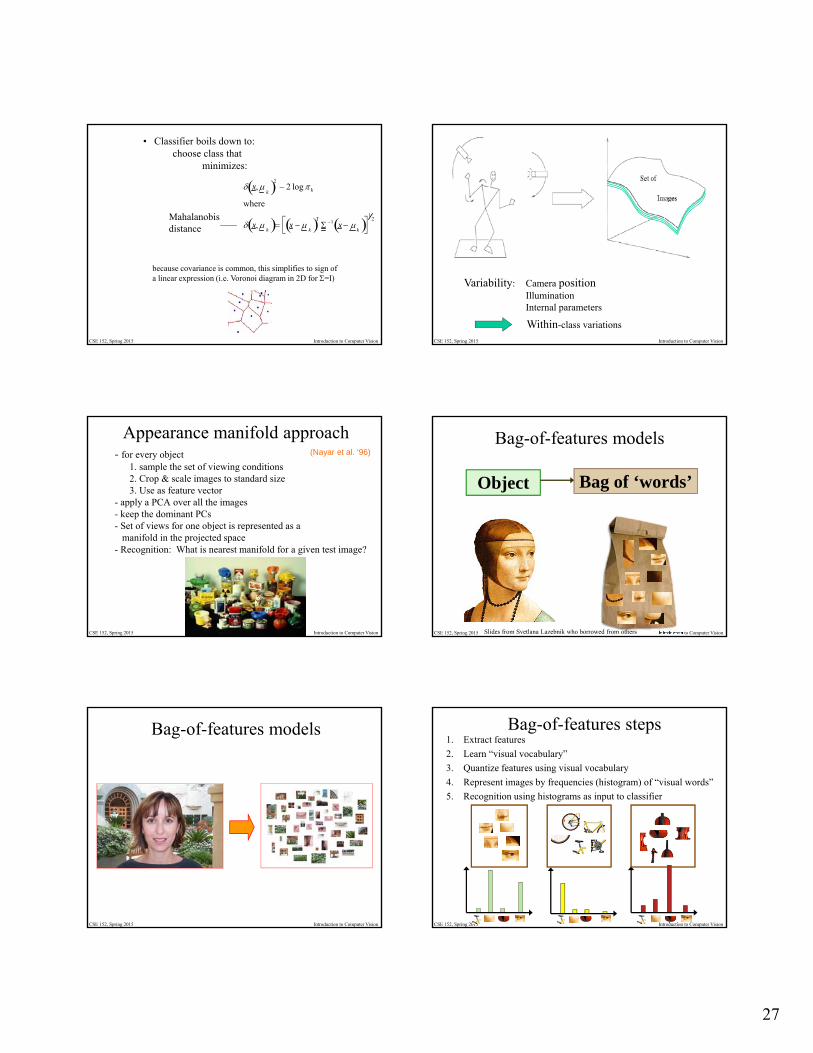
Variability: Camera positionIlluminationInternal parameters
Within-class variations
CSE 152, Spring 2015 Introduction to Computer Vision
Appearance manifold approach- for every object
1. sample the set of viewing conditions2. Crop & scale images to standard size3. Use as feature vector
- apply a PCA over all the images - keep the dominant PCs- Set of views for one object is represented as a
manifold in the projected space- Recognition: What is nearest manifold for a given test image?
(Nayar et al. ‘96)
CSE 152, Spring 2015 Introduction to Computer Vision
Object Bag of ‘words’
Bag-of-features models
Slides from Svetlana Lazebnik who borrowed from others
CSE 152, Spring 2015 Introduction to Computer Vision
Bag-of-features models
CSE 152, Spring 2015 Introduction to Computer Vision
1. Extract features
2. Learn “visual vocabulary”
3. Quantize features using visual vocabulary
4. Represent images by frequencies (histogram) of “visual words”
5. Recognition using histograms as input to classifier
Bag-of-features steps
28
CSE 152, Spring 2015 Introduction to Computer Vision
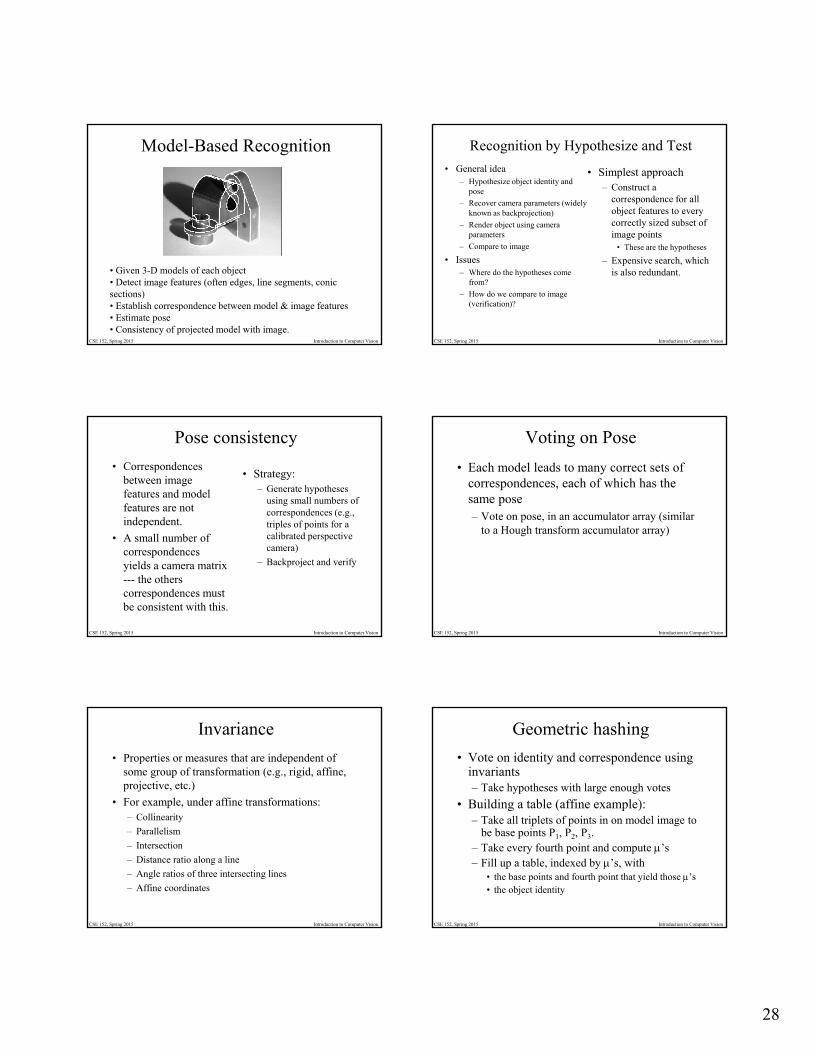
Model-Based Recognition
• Given 3-D models of each object• Detect image features (often edges, line segments, conic sections)• Establish correspondence between model & image features• Estimate pose• Consistency of projected model with image.
CSE 152, Spring 2015 Introduction to Computer Vision
Recognition by Hypothesize and Test
• General idea– Hypothesize object identity and
pose
– Recover camera parameters (widely known as backprojection)
– Render object using camera parameters
– Compare to image
• Issues– Where do the hypotheses come
from?
– How do we compare to image (verification)?
• Simplest approach– Construct a
correspondence for all object features to every correctly sized subset of image points
• These are the hypotheses
– Expensive search, which is also redundant.
CSE 152, Spring 2015 Introduction to Computer Vision
Pose consistency
• Correspondences between image features and model features are not independent.
• A small number of correspondences yields a camera matrix --- the others correspondences must be consistent with this.
• Strategy:– Generate hypotheses
using small numbers of correspondences (e.g., triples of points for a calibrated perspective camera)
– Backproject and verify
CSE 152, Spring 2015 Introduction to Computer Vision
Voting on Pose
• Each model leads to many correct sets of correspondences, each of which has the same pose– Vote on pose, in an accumulator array (similar
to a Hough transform accumulator array)
CSE 152, Spring 2015 Introduction to Computer Vision
Invariance
• Properties or measures that are independent of some group of transformation (e.g., rigid, affine, projective, etc.)
• For example, under affine transformations:– Collinearity
– Parallelism
– Intersection
– Distance ratio along a line
– Angle ratios of three intersecting lines
– Affine coordinates
CSE 152, Spring 2015 Introduction to Computer Vision
Geometric hashing
• Vote on identity and correspondence using invariants– Take hypotheses with large enough votes
• Building a table (affine example):– Take all triplets of points in on model image to
be base points P1, P2, P3.– Take every fourth point and compute ’s– Fill up a table, indexed by ’s, with
• the base points and fourth point that yield those ’s• the object identity
29
CSE 152, Spring 2015 Introduction to Computer Vision
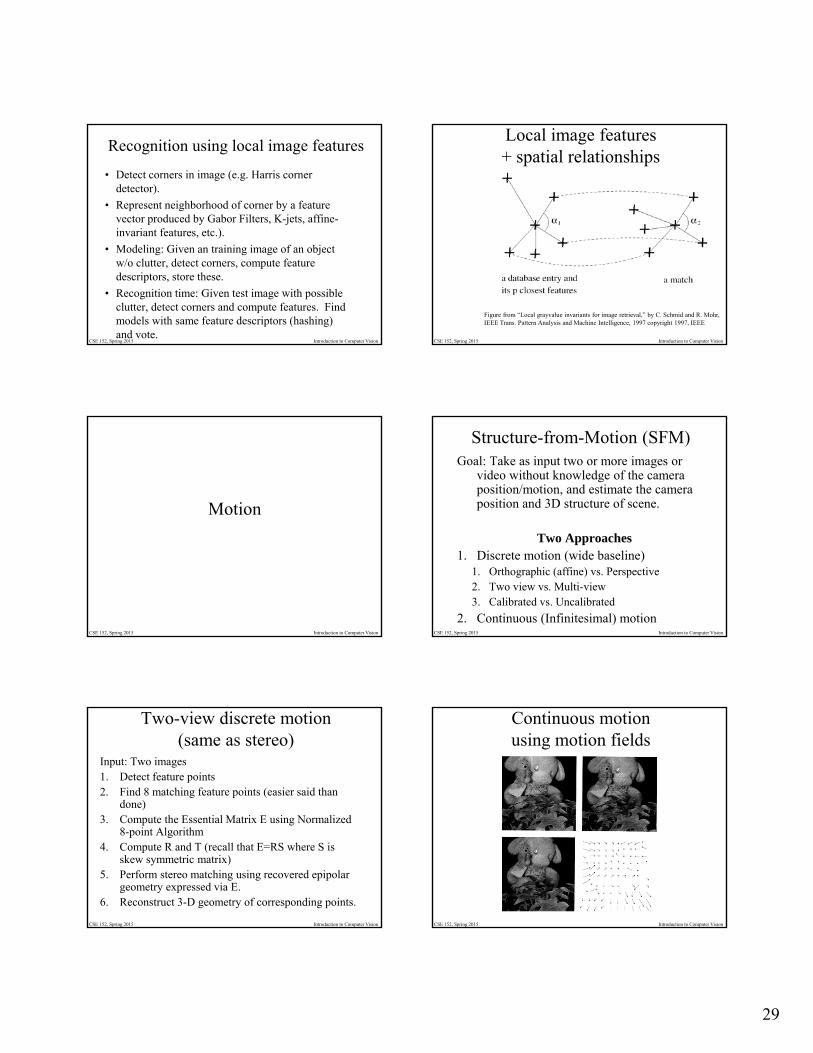
Recognition using local image features
• Detect corners in image (e.g. Harris corner detector).
• Represent neighborhood of corner by a feature vector produced by Gabor Filters, K-jets, affine-invariant features, etc.).
• Modeling: Given an training image of an object w/o clutter, detect corners, compute feature descriptors, store these.
• Recognition time: Given test image with possible clutter, detect corners and compute features. Find models with same feature descriptors (hashing) and vote.
CSE 152, Spring 2015 Introduction to Computer Vision
Local image features + spatial relationships
Figure from “Local grayvalue invariants for image retrieval,” by C. Schmid and R. Mohr, IEEE Trans. Pattern Analysis and Machine Intelligence, 1997 copyright 1997, IEEE
CSE 152, Spring 2015 Introduction to Computer Vision
Motion
CSE 152, Spring 2015 Introduction to Computer Vision
Structure-from-Motion (SFM)Goal: Take as input two or more images or
video without knowledge of the camera position/motion, and estimate the camera position and 3D structure of scene.
Two Approaches1. Discrete motion (wide baseline)
1. Orthographic (affine) vs. Perspective2. Two view vs. Multi-view3. Calibrated vs. Uncalibrated
2. Continuous (Infinitesimal) motion
CSE 152, Spring 2015 Introduction to Computer Vision
Two-view discrete motion(same as stereo)
Input: Two images1. Detect feature points2. Find 8 matching feature points (easier said than
done)3. Compute the Essential Matrix E using Normalized
8-point Algorithm4. Compute R and T (recall that E=RS where S is
skew symmetric matrix)5. Perform stereo matching using recovered epipolar
geometry expressed via E.6. Reconstruct 3-D geometry of corresponding points.
CSE 152, Spring 2015 Introduction to Computer Vision
Continuous motion using motion fields
30
CSE 152, Spring 2015 Introduction to Computer Vision
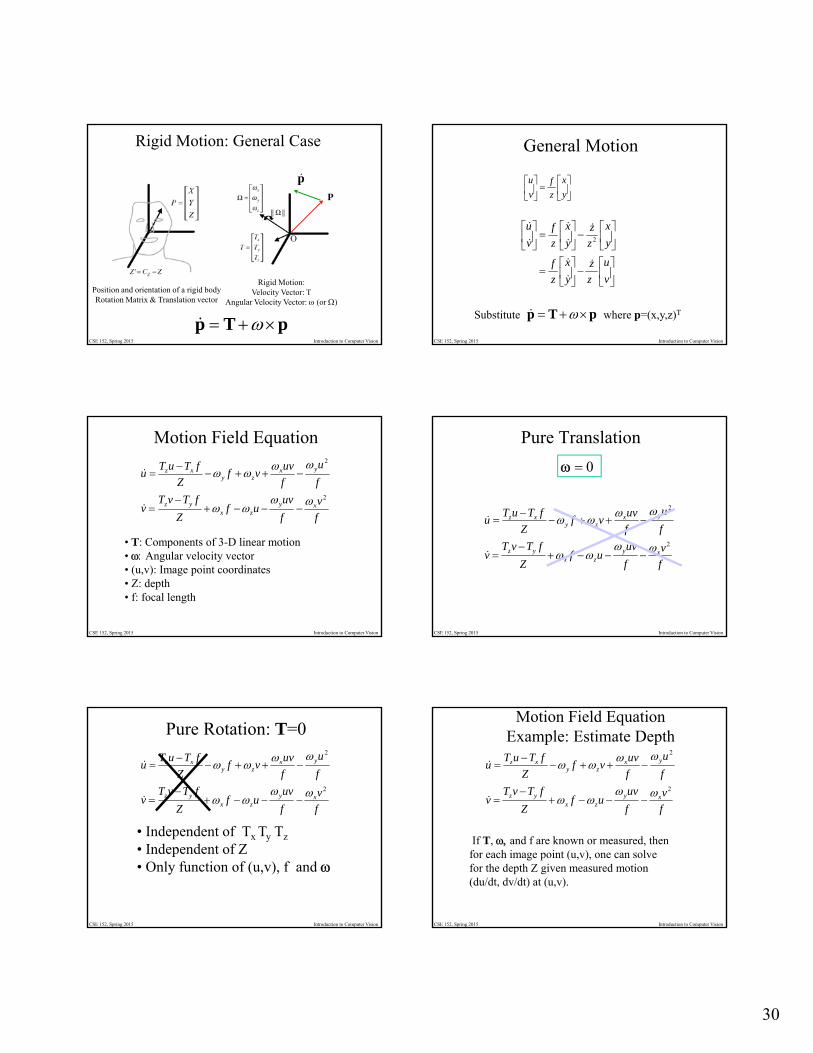
Rigid Motion: General Case
Position and orientation of a rigid bodyRotation Matrix & Translation vector
Rigid Motion:Velocity Vector: T
Angular Velocity Vector: (or )
P
pTp
p
CSE 152, Spring 2015 Introduction to Computer Vision
General Motion
y
x
z
f
v
u
y
x
z
z
y
x
z
f
v
u2
v
u
z
z
y
x
z
f
pTp Substitute where p=(x,y,z)T
CSE 152, Spring 2015 Introduction to Computer Vision
Motion Field Equation
• T: Components of 3-D linear motion• Angular velocity vector• (u,v): Image point coordinates• Z: depth• f: focal length
f
v
f
uvuf
Z
fTvTv
f
u
f
uvvf
Z
fTuTu
xyzx
yz
yxzy
xz
2
2
CSE 152, Spring 2015 Introduction to Computer Vision
f
v
f
uvuf
Z
fTvTv
f
u
f
uvvf
Z
fTuTu
xyzx
yz
yxzy
xz
2
2
Pure Translation
CSE 152, Spring 2015 Introduction to Computer Vision
Pure Rotation: T=0
• Independent of Tx Ty Tz
• Independent of Z• Only function of (u,v), f and
f
v
f
uvuf
Z
fTvTv
f
u
f
uvvf
Z
fTuTu
xyzx
yz
yxzy
xz
2
2
CSE 152, Spring 2015 Introduction to Computer Vision
Motion Field EquationExample: Estimate Depth
If T, and f are known or measured, then for each image point (u,v), one can solve for the depth Z given measured motion (du/dt, dv/dt) at (u,v).
f
v
f
uvuf
Z
fTvTv
f
u
f
uvvf
Z
fTuTu
xyzx
yz
yxzy
xz
2
2
31
CSE 152, Spring 2015 Introduction to Computer Vision
Optical Flow
CSE 152, Spring 2015 Introduction to Computer Vision
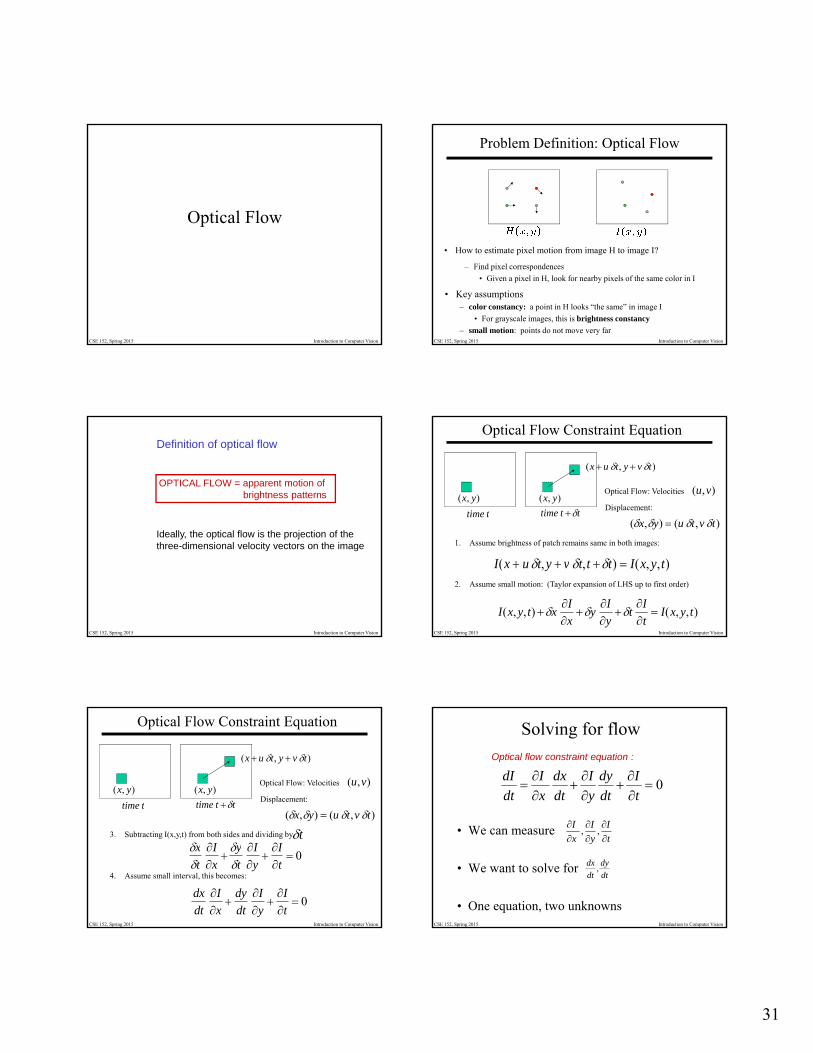
Problem Definition: Optical Flow
• How to estimate pixel motion from image H to image I?
– Find pixel correspondences
• Given a pixel in H, look for nearby pixels of the same color in I
• Key assumptions– color constancy: a point in H looks “the same” in image I
• For grayscale images, this is brightness constancy
– small motion: points do not move very far
CSE 152, Spring 2015 Introduction to Computer Vision
Definition of optical flow
OPTICAL FLOW = apparent motion of brightness patterns
Ideally, the optical flow is the projection of the three-dimensional velocity vectors on the image
CSE 152, Spring 2015 Introduction to Computer Vision
Optical Flow Constraint Equation
1. Assume brightness of patch remains same in both images:
2. Assume small motion: (Taylor expansion of LHS up to first order)
),( yx
),( tvytux
ttime tttime ),( yx
Optical Flow: Velocities ),( vu
Displacement:
),(),( tvtuyx
I(x u t,y v t,t t) I(x, y,t)
I(x, y, t) xI
xy
I
yt
I
t I(x, y,t)
CSE 152, Spring 2015 Introduction to Computer Vision
Optical Flow Constraint Equation
),( yx
),( tvytux
ttime tttime ),( yx
Optical Flow: Velocities ),( vu
Displacement:
),(),( tvtuyx
x
t
I
xy
t
I
yI
t 0
3. Subtracting I(x,y,t) from both sides and dividing by t
4. Assume small interval, this becomes:
dx
dt
I
x
dy
dt
I
yI
t 0
CSE 152, Spring 2015 Introduction to Computer Vision
Solving for flow
• We can measure
• We want to solve for
• One equation, two unknowns
Optical flow constraint equation :
0
t
I
dt
dy
y
I
dt
dx
x
I
dt
dI
t
I
y
I
x
I
,,
dt
dy
dt
dx,
32
CSE 152, Spring 2015 Introduction to Computer Vision
02),(
02),(
tyxy
tyxx
IvIuIIdv
vudE
IvIuIIdu
vudE
CSE 152, Spring 2015 Introduction to Computer Vision
CSE 152, Spring 2015 Introduction to Computer Vision
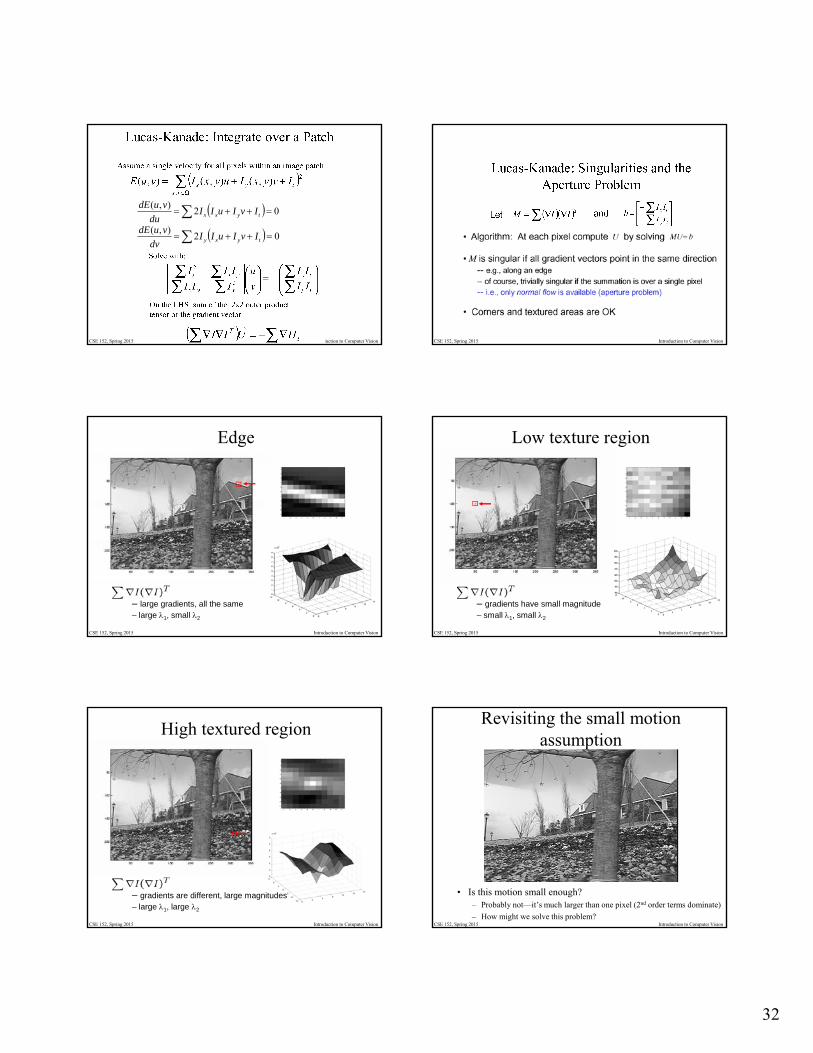
Edge
– large gradients, all the same– large 1, small 2
CSE 152, Spring 2015 Introduction to Computer Vision
Low texture region
– gradients have small magnitude– small 1, small 2
CSE 152, Spring 2015 Introduction to Computer Vision
High textured region
– gradients are different, large magnitudes– large 1, large 2
CSE 152, Spring 2015 Introduction to Computer Vision
Revisiting the small motion assumption
• Is this motion small enough?– Probably not—it’s much larger than one pixel (2nd order terms dominate)
– How might we solve this problem?
33
CSE 152, Spring 2015 Introduction to Computer Vision CSE 152, Spring 2015 Introduction to Computer Vision
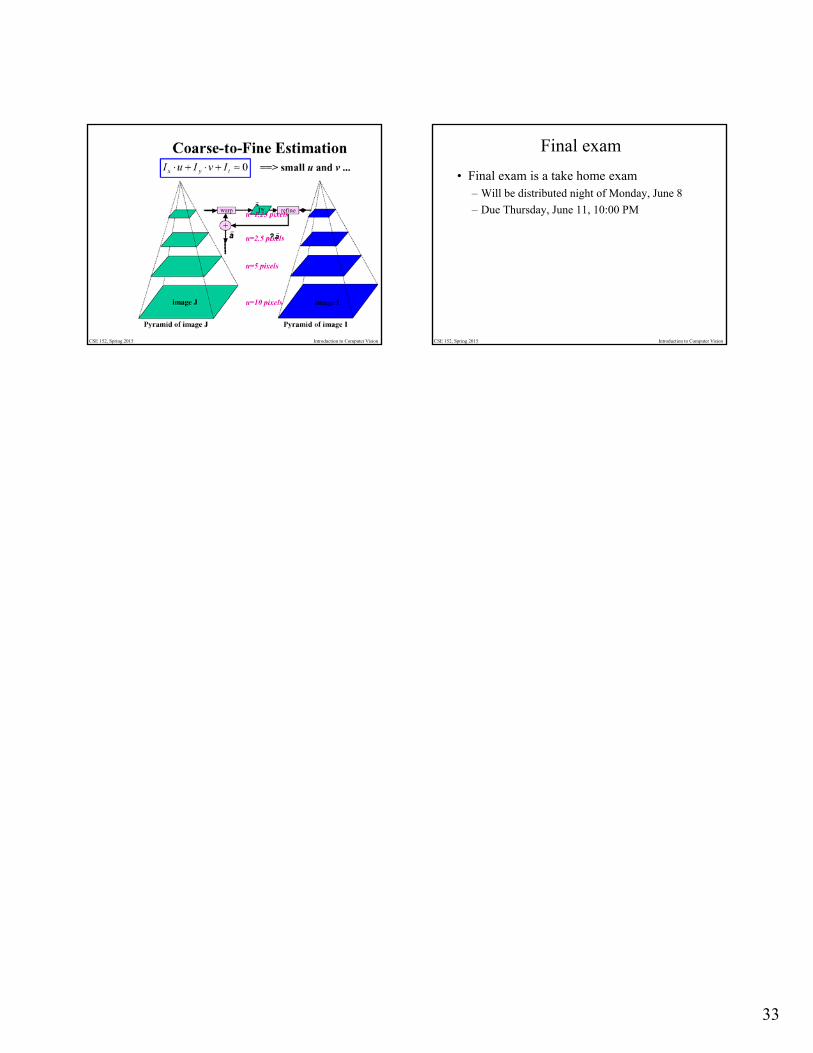
Final exam
• Final exam is a take home exam– Will be distributed night of Monday, June 8
– Due Thursday, June 11, 10:00 PM