controle clássico intro
DESCRIPTION
Controle clássico introduçãoTRANSCRIPT

CCL:CONTROLE CLÁSSICO
Profa. Mariana Cavalca
Currículo Resumido• Curso Técnico em Eletro-Eletrônica – ETEP (São José dos Campos - SP)
• Iniciação científica (estatística)• Estágio – Empresa ITA júnior: microcontroladores.
• Engenharia de Controle e Automação – Unifei (Itajubá – SP)• Monitoria de Física• Iniciação científica e Trabalho de Diploma (PDI e Visão Computacional)• Estágio – Citech – Sistemas Supervisórios, CLP, Banco de Dados
• Mestrado e Doutorado em Engenharia Eletrônica e Computação na área de Sistemas e Controle – ITA (São José dos Campos - SP)
• Cargo de Professor Adjunto na UDESC desde Setembro de 2011. Membro do Grupo de Controle do DEE.
• Principais áreas de Interesse: Teoria de Controle, Controle Preditivo, Controle Tolerante a Falhas, Estimação Paramétrica, Desenvolvimento de Plantas Didáticas.

CONTROLE CLÁSSICOIntrodução aos Sistemas de Controle: Revisão
Profa. Mariana Cavalca

O que é controlar?

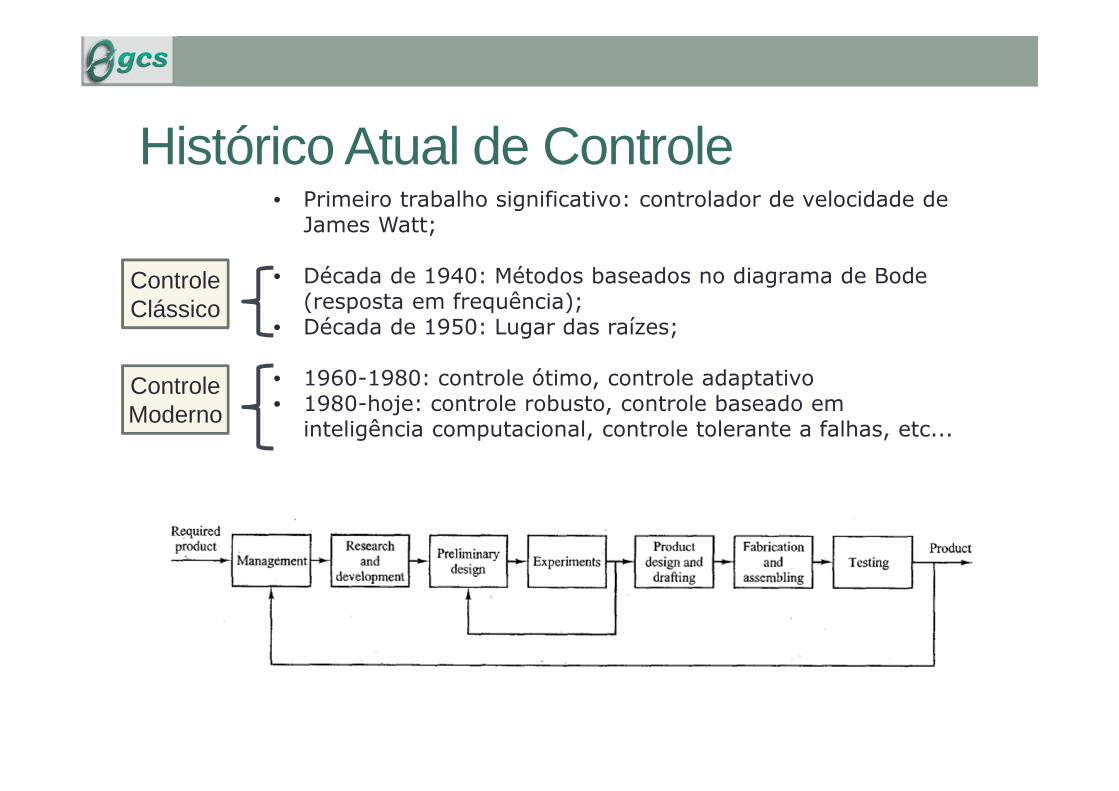
Histórico Atual de Controle • Primeiro trabalho significativo: controlador de velocidade de
James Watt;
• Década de 1940: Métodos baseados no diagrama de Bode (resposta em frequência);
• Década de 1950: Lugar das raízes;
• 1960-1980: controle ótimo, controle adaptativo• 1980-hoje: controle robusto, controle baseado em
inteligência computacional, controle tolerante a falhas, etc...
Controle Clássico
Controle Moderno

Histórico Atual de Controle • Primeiro trabalho significativo: controlador de velocidade de
James Watt;
• Década de 1940: Métodos baseados no diagrama de Bode (resposta em frequência);
• Década de 1950: Lugar das raízes;
• 1960-1980: controle ótimo, controle adaptativo• 1980-hoje: controle robusto, controle baseado em
inteligência computacional, controle tolerante a falhas, etc...
Controle Clássico
Controle Moderno
Histórico Atual de Controle • Primeiro trabalho significativo: controlador de velocidade de
James Watt;
• Década de 1940: Métodos baseados no diagrama de Bode (resposta em frequência);
• Década de 1950: Lugar das raízes;
• 1960-1980: controle ótimo, controle adaptativo• 1980-hoje: controle robusto, controle baseado em
inteligência computacional, controle tolerante a falhas, etc...
Controle Clássico
Controle Moderno

Definições
Variável Controlada
Variável Manipulada
Planta Processo Sistema
DistúrbioInterno
DistúrbioExterno
Controle realimentado

Malha Aberta x Malha Fechada• Porque fechar a malha de um sistema (Feedback
– Realimentação) ?
1. Estabilizar;
2. Reduzir a sensibilidade a variações de G(s);
3. Rejeitar distúrbios;
4. Modificar a resposta transitória;
5. Reduzir o erro em regime permanente.
• Quando é melhor aplicar a malha aberta?

Sistemas de Controle• Exemplos:
• Engenharia Aeronáutica e Aeroespacial:– Controle de atitude, velocidade, aceleração.
• Controle Ambiental:– Controle da temperatura, da umidade, da ventilação.
• Usinagem:– Controle de posição e de velocidade.
• Veículos autônomos:– Transporte de material ou de pessoas, 2D, 3D, deslizando sobre andaimes.
• Robótica:– Controle de posição, orientação, velocidade, força.

Controle Automático

Especificação de Desempenho• Traduzir:

Especificação de Desempenho• Em índices de desempenho:
1. Função de Custo ou objetivo;
2. Resposta Transitória;
Tempo de acomodação, Máximo pico, tempo de subida, etc...
3. Acurabilidade Estática;
Erro em regime permanente
4. Acurabilidade Relativa.
Margens para estabilidade.

Introdução aos Sistemas de Controle• ISC:
1. Conceitos básicos (Laplace);
2. Modelagem Matemática;
3. Análise de sistemas de 1ª e 2ª ordem;
4. Estabilidade absoluta e relativa;
5. Erro em regime permanente.

Modelo MatemáticoSistema Físico
ModeloIdentificação ModelagemAnálise Estatística
O Modelo é útil ou não? Análise
SimulaçãoProjeto
Validação

Modelagem Matemática
Simplicidade Acurácia
Sistemas Lineares Invariantes no Tempo

Diagrama em Blocos

Sistema de Primeira Ordem
Tempo de Acomodação: 3T (5%) ou 4T (2%)
Tempo de Subida: 2,2T

Sistema de Segunda Ordem

Sistema de Segunda Ordem• Sub – Amortecido

Sistema de Segunda Ordem
-2 -1.8 -1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0-2
-1.5
-1
-0.5
0
0.5
1
1.5
2Pole-Zero Map
Real Axis
Imag
inar
y A
xis
Wn
ξWn
Wd
β

Controle Clássico
Como impor um comportamento desejado?
• Projeto de Controladores no Domínio da Frequência.

CCL – Plano de Ensino Resumido
1. Análise pelo Diagrama do Lugar das Raízes;
2. Ações Básicas de Controle;
3. Projeto de Controladores por Intermédio do Diagrama
do Lugar das Raízes;
4. Técnicas de Análise de Resposta em Frequência;
5. Projeto de Controladores por Intermédio de Técnicas
de Resposta em Frequência;
6. Tópicos especiais sobre controladores PID.

CCL – Livros Base
• NISE, Norman S. Engenharia de sistemas de controle. 5. ed. Rio de Janeiro: LTC, 2009.
• DORF, Richard C. e BISHOP, Robert H. Sistemas de Controle Modernos. LTC - Livros
Técnicos e Científicos Editora S.A., 8a Edição, 2001.
• OGATA , Katsuhiko. Engenharia de Controle Moderno. Prentice-Hall. 4a Ed., 2003.
• KUO, Benjamin C. Sistemas de Controle Automático. McGraw-Hill do Brasil, 1984.
• PHILLIPS , C. L. e HARBOR , R. D., Sistemas de Controle e Realimentação. Makron
Books, 1997.
• MAYA , P. A.; LEONARDI , F. Controle Essencial. São Paulo: Pearson Brasil, 2011.

�Site (Plano de Ensino, Recados, Notas, Material de Aulas, Listas de Exercícios): http://www.joinville.udesc.br/portal/professores/marianasantos/
Verifique o site regularmente!!!
� Provas (Teoria 80% da Nota Final)• 1ª PROVA � 06/09/13• 2ª PROVA � 11/10/13• 3ª PROVA � 22/11/13• Artigo � Apresentações no dia 04/12/13• Exame � 11/12/13
� 1 Formulário por prova (folha A4 sem pauta – frente e verso) – Não acumulativo – Deve ser anexado a Prova (vale 5% da nota).
� Revisão de Provas: Até antes da próxima prova. • Aproximações pré-exame: 69=70, 68 depende, <=67 Exame!• Aproximações pós-exame: 48=49=50, 46 e 47 depende, <=45 Reprovado!
� Pontualidade e Frequência
Para ser aprovado precisa de mínimo 75% de 90 horas /aula = 68 presenças!
CCL - Avisos

CCL – Próxima Aula:
Lugar das Raízes
CCL:CONTROLE CLÁSSICOBom estudo!
Profa. Mariana Cavalca