contamination and remediation waves in a filtration model
TRANSCRIPT
P E R G A M O N Applied Mathematics Letters 13 (2000) 75-84
Applied Mathematics Letters
www.elsevier.nl/locate/aml
C o n t a m i n a t i o n a n d R e m e d i a t i o n W a v e s in a F i l t r a t i o n M o d e l
G . L E D D E R AND J . D . L O G A N * Department of Mathematics, University of Nebraska
Lincoln, NE 68588-0323, U.S.A.
(Received July 1999; revised and accepted October i999)
A b s t r a c t - - W e propose a model for the filtration of suspended particles in porous media and we examine some of its mathematical properties. The model includes a variable porosity that depends on the volume of particles retained through filtration and a kinetics law that allows both a positive and negative rate of particle accretion. We characterize the properties of accretion rates that lead to contamination and remediation wave fronts in the model. (~) 2000 Elsevier Science Ltd. All rights reserved.
K e y w o r d s - - F i l t r a t i o n , Traveling waves.
1 . F O R M U L A T I O N O F T H E M O D E L
In th is pape r , we examine a phenomenologica l mode l for the advect ion , d ispers ion, and accre-
t ion of s u s p e n d e d par t ic les flowing t h rough a one-d imens iona l porous domain . The pore space is
a s sumed to undergo a vo lumet r ic change when par t i c le accre t ion occurs. Our goal is to charac-
ter ize p rope r t i e s of t he accre t ion reac t ion ra te for which t ravel ing wave solut ions of wave front
t y p e exist . T h e t rave l ing waves that are p r o d u c e d evolve in a s p a t i a l - t e m p o r a l d o m a i n where
the t e m p o r a l coo rd ina t e is not o r d i n a r y t ime, bu t r a the r is measu red by the t o t a l vo lume flow
through the sys tem.
We consider a s i t ua t ion where a suspens ion of pa r t i cu l a t e m a t t e r is al lowed to flow t h r o u g h a
saturated, uni form porous m e d i u m wi th flow i n one d i rec t ion only. Let ~ represen t the spa t i a l
coord ina te , and let t represent the t ime. We are interested in wave fronts on u n b o u n d e d spa t i a l
( lomains. Such so lu t ions are of ten observed phys ica l ly in t r ace r expe r imen t s in long, packed t u b e s
where a cons t an t concen t r a t i on is m a i n t a i n e d at the inlet; under some condi t ions , a concent ra -
t ion wave progresses t h r o u g h the t u b e moving at a cons tan t speed and m a i n t a i n i n g the same
shape. We assume t h a t the porous med ium is fully occupied by the solid ma t r ix , the water , and
p a r t i c u l a t e s su spended in the wa te r a n d / o r adhe red to t he solid mat r ix . We also assume t h a t all
pa r t i c les m a i n t a i n cons t an t volume. Let C be the concen t ra t ion of mobi le pa r t i cu la t e s , expressed as a ra t io of t he vo lume of mobi le pa r t i cu l a t e s to the vo lume of t he suspension. Let ~ be the
concen t r a t i on of adhe red pa r t i cu la t e s , expressed as a ra t io of t he vo lume of adhe red p a r t i c u l a t e s
The authors greatly appreciate the many discussions on this model with S. Cohn of the University of Nebraska- Lincoln, M. Peletier of CWI (Netherlands), and T. Witelski of Duke University. *Supported by the National Science Foundation of Grant DMS-9708421.
0893-9659/00/$ - see front matter @ 2000 Elsevier Science Ltd. All rights reserved. Typeset by A2t4S-q~F,X PII: S0893-9659 (00)00080-X
76 G. LEDDER AND J. D. LOGAN
to total medium volume. Let & be the porosity; note that, owing to the assumptions of total sat- uration and constant volume, & also gives the ratio of suspension volume to total volume. Let w0 be the porosity of the medium prior to the introduction of suspended particles. Finally, let V be the filtration velocity (Darcy velocity), i.e., the ratio of the flow rate to the cross-sectional area.
Normally, one begins with an equation representing the conservation of mass. However, given that the volume of all particles is assumed constant while the density depends on the type of particle, it is reasonable to consider the conservation of volume instead. Therefore, consider an arbitrarily thin slice of the porous medium. Taking the total volume of this slice to be unity, we note that the entire volume consists of the solid matrix, the adhered particulates, and the suspension. The solid matrix has volume 1 -coo, while the adhered particles and suspension have the volumes ~ and &, respectively. Thus, conservation of total volume leads to the relation
& --= cOo - 0. ( i )
This result has an additional consequence. The volume of any slice is fixed, and particles are neither created nor destroyed. Hence, the net flux I)~ must always be 0. Thus, we obtain the important result that the f i l trat ion velocity is str ict ly a function of time t. Note that the average speed of moving particles, given by I ) /&, wi l l not be independent of position.
Now we examine conservation of particulate volume. Consider a control volume containing all material in the region Xl < :c < x2, and let A be the constant cross-sectional area of the medium. The total volume of particulates in this region is given by
/2( ) Particulate Volume = &C + 0 A d~. 1
The advective flux is AI)C, and the flux by diffusion and dispersion is -A/ )d '~ , w h e r e / ) is the sum of diffusion and dispersion coefficients. If Do is the diffusion coefficient in fi'ee-standing suspension, then the diffusion coefficient in the porous medium is assumed to be D0©. The dispersion coefficient is generally assumed to be proportional to the filtration velocity; thus, we t a k e / ) = Do& + &IY. Hence, the net flux of particulates into the control volume is
:
The rate of change of particulate volume is equal to the net flux, so
d-~ , 1 -~x D o & + & * d~ - f d dJ:.
Since xl and x2 are arbitrary fixed points, we have
which expresses conservation of particulate volume. Now we consider the accretion of particles. We assume that the rate of accretion is proportional
to the filtration velocity and to the concentration of particles in the suspension, and depends on the concentration of aecreted particles in a manner to be specified later. We also assume that accreted particles can be returned to the suspension at a rate that is proportional to the filtration velocity and to the concentration of accreted particles. In keeping with these assumptions, we postulate the constitutive law
as =
where F is a smooth, nonnegative dimensionless function with F(0) = 1 and A and ~ are pro- portionality constants. This relation is a generalization of that used by Saiers et al. [1] to model

Contaminat ion and Remediation Waves 77
colloid absorption in a constant-porosity model. Note that the second term on the right postulates
a mechanism whereby attached particles can detach and reenter the mobile phase. Additional
assumptions on the properties of F will be posed later. For now we note tha t it is not assumed
tha t F is a decreasing function, as in previous works (see [2,3]). In fact, it is the case of increas- ing F tha t is of key interest. Specifically, F is an increasing flmction whenever the accretion
rate is a decreasing function of pore size, and we would expect this to be true in cases where the a t tachment mechanism includes mechanical entrapment. (Refer to [4,5] for a review and
bibliography of other filtration mechanisms. Grindrod [6] mentions particle-porosity constitutiw~
relations other than (1). Cohn et al. [7] use (3) with/3 = 0.)
The Dimens ion le s s M o d e l
The velocity l)(t) can be eliminated from this one-dimensional model under certain circum- stances. The idea is to replace t ime t" by a temporal coordinate r that measm'es the to~ al flow
through the system f P
= .Z ~ (~) a,~. T (4)
It easily follows tha t 0 ~ (.,.) 0 Ot -O-rr'
and therefore, the model equations (1)-(3) become
r b
(7)
We now reformulate the model in dimensionless form by defining the scaled quantities
r cb ~ d ~ V x = A ~ , t - a ; o / X U ' ~ = --'~o s = ~o--' ~ = - U ' V = V-- 7 , (S)
where U is a reference concentration and V* is a reference filtration velocity. In the traveling
wave problem, we set U = 1. These definitions yield the dimensionless model
((1 - s ) u + s ) t : o~Uxx - u~ + e V - I ((1 - s)ux)x, (9)
s~ = u P ( s ) - ~s , ( l o )
where
~ o 3 ,X~0 Do (11) c~-A&, / 3 - A U ' e - V*
Diffusion is generally unimpor tant in porous media, therefore, we make the simplifying assmnp- tion e = 0. This assumption is reasonable except in the limit V ~ 0. This limit corresponds t.o a completely clogged filter, and so the simplified model loses its validity as s --~ 1.
2 . W A V E F R O N T S A N D E Q U I L I B R I U M S T A T E S
It is common in nonlinear parabolic and hyperbolic problems to study the various intera.ctions by examining traveling wave solutions (TWS), provided they exist (e.g., see [8]). We seek TWS of wave front type, i.e., continuously differentiable solutions of the form
= ~ ( z ) , ~ : ~ (~) , ~ : ~: - (:t, (1~)
which approach equilibrium states at z = +oc. Here there should be no confusion in deploring the wave forms by u and s. Note tha t waves of form (12) are not traveling waves in t:he normal sense, as t represents total flow rather than clock time. In laboratory coordinates (:i:, t), a wave of form (12) will have a fixed shape and a variable speed.

78 G. LEDDER AND J. D. LOGAN
E q u i l i b r i u m S t a t e s
We are interested in identifying traveling waves for a variety of conditions, so we must first examine the possible equilibrium states for system (9),(10). The transport equation (9) is satisfied trivially for any constant state (u, s), but the accretion equation (10) is satisfied only for a constant
state having the property F ( ~ ) /3
---- - . ( 1 3 ) 8 I%
Physical considerations dictate that this relation should define a function g(u), as we should expect each possible steady value of contaminant concentration in the mobile phase to correspond to a unique steady level of attachment. This assumption leads to the mathematical requirement that F(s ) / s be monotone decreasing. Hence, we assume
F ( s ) F ' ( s ) < - - (14 )
S
Geometrically, this means that the graph of F at any point s cannot be as steep as the chord connecting (0, 0) to (s, F(s)). Note that all decreasing functions automatically satisfy this require- ment, but that some increasing functions do also. Note also that the comparative magnitudes of F(1) and /3 affect the set of possible equilibrium states ('5, ~). If/3 > F(1), then a unique equilibrium state exists for all 0 < ~2 < 1 and ~ is bounded above by some ~,~ < 1. In this case, there are no equilibrium states corresponding to nearly-complete clogging. If, however, ~ < F(1), then equilibrium states exist only for ~ < /3/F(1). In this case, particle concentrations higher than the critical va lue/3 /F(1) result in complete clogging.
We shall restrict the problem of interest to the problem of finding traveling wave solutions for which one of the endstates is the point (0, 0), corresponding to a complete lack of particulates. We will classify such a wave as a contamination wave (C-wave) if the origin serves as the equilibrium state at +oc and a remediation wave (R-wave) if the origin is instead the equilibrium state at - o c . The problem of interest is then to identify possible endstates 02, g) such that a C-wave or an R-wave connects (0, 0) with (g, g).
T h e T r a v e l i n g W a v e E q u a t i o n s
Before studying specific cases, we want to obtain some general results. Substituting the as- sumed traveling wave forms (12) into the partial differential equation model (9),(10), with e = 0, and then integrating the first equation gives
- c ( ( 1 - s ) u + s ) = a n ' - u ,
- c s ' = u F (s) - / 3 s ,
where the constant of integration is found by noting that the origin is assumed to be an equilibrium state and prime denotes differentiation with respect to the traveling wave coordinate z. The other endstate (g, g) must also be an equilibrium point for the system, and this yields an expression for the wave speed
C - - (i - ~ )~+~ Eliminating ~2 from this expression, using (13), yields the result
e -- ~ + 9 (a), (15)
where the function g is defined by g (s) = F (s) - /3s . (16)

Contamination and Remediation Waves 79
Note that g(a) = (1 - 'Ct)F(g) >_ O, and hence,
0 < c < 1 .
We will find it convenient to use the function g in place of F; with this change, we have the following problem.
PaOBLEM. Given ct > 0, /3 > 0, and a continuously differentiable flmction g : [0, 1 -~ .'~ such that .q(0) = 1 and g'(s) < g(s)/s, find points (~, g) such that
o < ~ < 1, g (~) > o, ~ - 9 a + o (a ) ' (17)
and there exists a unique, smooth solution to the system
~ ' = ~ [~g (~) - 9 s (1 - ,,,)], cs' = ;Js (1 - u) - ~g ( s ) ,
with boundary conditions
s ( - ~ ) = s _ , ~ ( + o ~ ) = ~ + , s ( + o ~ ) = s + ,
where one of (u~=, s=k) is (0, 0) and the other is (~, g), with c given by (15).
{:18) (19)
3 . E X I S T E N C E A N D U N I Q U E N E S S
O F T R A V E L I N G W A V E F R O N T S
The existence analysis is based on the standard phase plane argmnent that determines a hete- roclinic orbit connecting the two equilibrium states, or critical points, at minus and plus infinity (see, for example, [9]).
We first examine the nature of critical points of the dynamical system (18),(19). The desired ,mdstates (0,0) and (~, 8) are critical points (by construction), along with any other state (u*, s*) such that
fls* 0 < s* < ~, 9 (s*) = g (~), ~,* -
~ s* + g (s*)
The Jacobian Matrix J(u*, s*) at any critical point (u*, s*) is found to be
( a -1 / J - ' c [g (g )+~s *] -c~- lc (1 - u * ) ) J ( ~ * , s * ) = \ - c - ' [ g ( s ' ) + g s .1 9 c -~ [1 - , , * - ( 9 - ' ~ * g ' ( s * ) ) ] _
The analysis of the Jacobian Matrix follows from an elementary lemma.
LEMMA 1. Let J = ( j i k ) b e a 2 x 2 m a t r i x w i t h 3 u > 0 , J12 < 0 , and j21 < 0 . Then
(i) the eigenvalues of J are real and can be labeled such that A2 < j l l < A1, (ii) A2 < 0 i f f l J ] < 0 , and
(iii) the eigenveetors corresponding to A2 lie in the first and third quadrants, while those corresponding to A1 lie in the second and fourth quadrants.
Statements (i) and (ii) follow from the expressions
222) + 4j12J'21 (j~, + j ~ ) • ~/(y. +y~)~ +41zl (y~l +h~) ± x/(Y~l - A
2 2
and Statement (iii) is a corollary of Statement (i). Application of Lemma 1 to the dynamical system for traveling wave fl'onts yields a qualita-
tive characterization of the trajectories near a critical point in terms of the determinant of the Jacobian.
80 G. LEDDER AND ,]. D. LOGAN
LEMMA 2. A critical point (u*,s*) of system (18),(19)is a saddle iff ]J(u*,s*)J < 0, and an
unstable node otherwise. In particular, (0,0) is a saddle iff g(g) < 1, while any other critical point (u*, s*) is a saddle iff g~(s *) > O. Furthermore, if a critical point is a saddle, then the one- dimensional stable manifold corresponding to the negative eigenvalue enters the point (u*, s*)
with positive slope.
This lemma follows immediately from Lemma 1 and computat ion of I J(u*,s*)] for the two cases. We need one additional result.
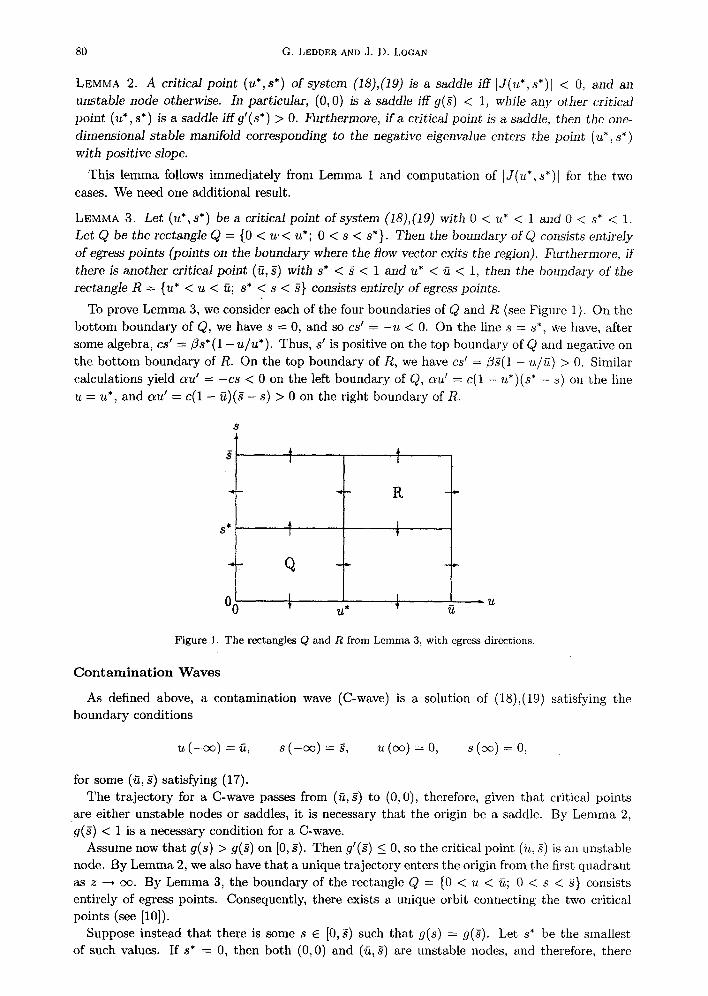
LEMMA 3. Let (u*,s*) be a critical point of system (18),(19) with 0 < u* < 1 and 0 < s* < 1. Let Q be the rectangle Q = {0 < u .< u*; 0 < s < s*}. Then the boundary of Q consists entirely of egress points (points on the boundary where the flow vector exits the region). Furthermore, if there is another critical point (fi, g) with s* < ~ < 1 and u* < ~ < 1, then the boundary of the rectangle R = {u* < u < fi; s* < s < ~} consists entirely of egress points.
To prove Lemma 3, we consider each of the four boundaries of Q and R (see Figure 1). On the bo t tom boundary of Q, we have s = 0, and so cs' = - u < 0. On the line s = s*, we have, after some algebra, cs' =/~s*(1 - u / u * ) . Thus, s ' is positive on the top boundary of Q and negative on the bo t tom boundary of R. On the top boundary of R, we have cs' =/~g(1 - u/5) > 0. Similar
calculations yield au ~ = - c s < 0 on the left boundary of Q, ~u ' = c(1 - u*)(s* - s) on the line u = u*, and c~u' = c(1 - ~)(g - s) > 0 on the right boundary of R.
s*
'"' t
t
Q -
J
I
00 U* fi ~ U
Figure 1. The rectangles Q and R from Lemma 3, with egress directions.
Contamination Waves
As defined above, a contamination wave (C-wave) is a solution of (18),(19) satisfying the boundary conditions
u ( - ~ ) = ~, s ( - ~ ) = ~, u ( ~ ) = 0, s ( ~ ) = 0,
for some (fi, ~) satisfying (17). The t ra jectory for a C-wave passes from (fi, ~) to (0, 0), therefore, given tha t critical points
are either unstable nodes or saddles, it is necessary that the origin be a saddle. By Lemma 2, g(g) < 1 is a necessary condition for a C-wave.
Assume now tha t g(s) > g(~) on [0, g). Then g'(~) < 0, so the critical point (~, ~) is an unstable node. By Lemma 2, we also have tha t a unique t rajectory enters the origin from the first quadrant as z--* 00. B y L e m m a 3 , the boundary of the rectangle Q = {0 < u < ~; 0 < s < ~} consists entirely of egress points. Consequently, there exists a unique orbit connecting the two critical points (see [10]).
Suppose instead tha t there is some s E [0, ~) such tha t g(s) = g(g). Let s* be the smallest of such values. If s* = 0, then both (0,0) and (~,~) are unstable nodes, and therefore, there

Contamination and Remediation ~Vaves 81
can be no t ra jec tory connecting them. Hence, assume s* > 0. By Lemma 3, the boundary of the rectangle Q = {0 < u < u*; 0 < s < s*} consists entirely of egress points. It is, therefore,
impossible tha t a t ra jectory could connect (g, ~) to (0, 0), because such a t ra jectory would ttave to enter the rectangle Q in order to reach the stable manifold in the first quadrant.
We have proved the following theorem.
THEOREM 1. System (18),(19) has a (unique) C-wave from a point ('g, ~) s~tisilvino (17.) iff ~j(s) > 9(g) for 0 < s < g.
tlEMAaK. Theorem 1 gives conditions under which a C-wave exists for system (18),(19). The heteroclinic orbit obtained in the theorem corresponds to a unique wave fi'ont solution to the
(,riginal problem (2),(3) (with Do = 0) of the form
( / : ) (/0 ) d = c .~-~ 9 (n) d~l , ~ = a sc - ~ 9 (.,1) d,~ .
Determinat ion of the actual wave front solution would require an additional constitutive assump-
tion relating the filtration velocity to the hydraulic gradient, the porosity, and intrinsi(: properties
of the porous medium, as for example, embodied in Darcy's law.
R e m e d i a t i o n W a v e s
A remediation wave (R-wave) is defined to be a solution of (18),(19) satisfying the boundary ~'onditions
= 0 , = 0 , = =
for some (~, ~) satisfying (17). The theory of R-waves is roughly analogous to that of C-waves. In particular, w(~ have the
following theorem.
THEOREIVI 2. System (18),(19) has a (unique) R-wave to a point (~, g) saris(ring (17) itf q'(.~) > 0 with g(s) < 9(g) for 0 < s < g.
The sufficiency of the given conditions is demonstrated in the same way ~ in Theorem 1. The
necessity requires slight modifications. If the given conditions are not met, then either 9'(.~) -< 0
or there exists some s E (0, g) such that 9(s) = 9(g). In the former case, (~,.~) is an m~stable node, so there cannot be a t ra jectory tha t approaches this point. In the latter case, let s* b(~ the
largest s < g such tha t g(s) = 9(~). Let R be the rectangle R = {u* < u < '~; s* < s < .~} By Lemma 3, the boundary of R consists entirely of egress points, hence, no t ra jectory can (rater R
t?om (0, 0). The remark given after Theorem 1 holds for R-waves as well as C-waves.
4. A N E X A M P L E
An example is provided by the accretion function
F ( s ) = 1 + 6 s - 3s 2.
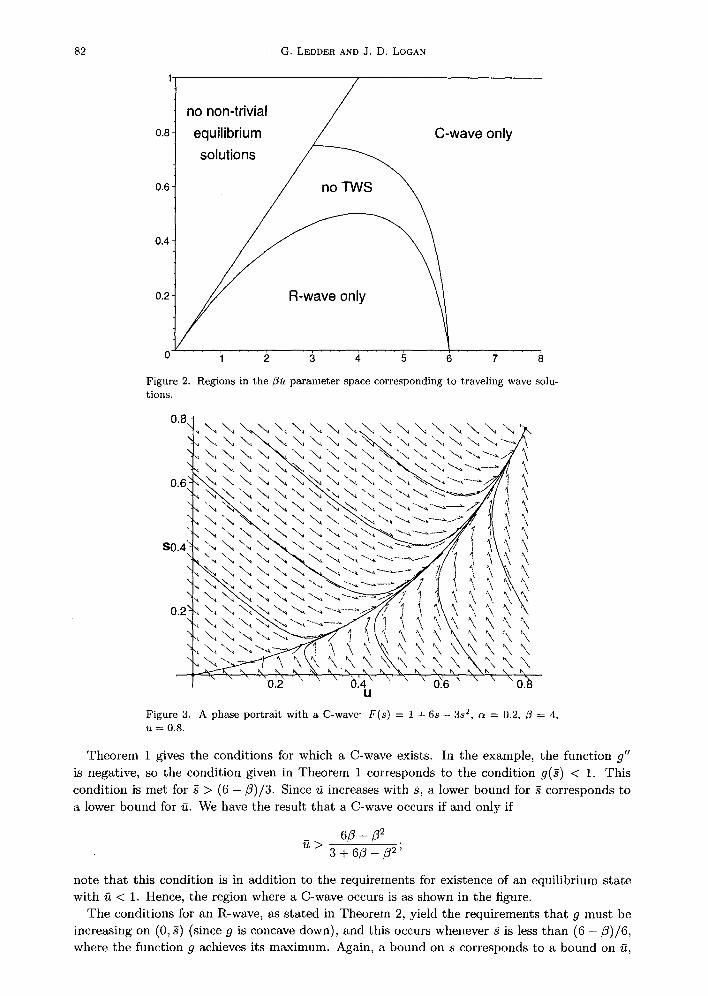
This function is chosen simply because it demonstrates tile variety of phenomena that are possible as a result of Theorems 1 and 2. We consider the complete range of models tha t can result fi'om this case. There are two degrees of freedom, one in the problem (~) and one in tile I)oumtary da ta (~). The parameter space is shown in Figure 2, with ~ on the horizontal axis and 5, on the vertical axis.
Note first tha t the set of possible choices of g is bounded above both by 1 and also by /~ /F(1) ; hence, there is a tr iangular region in the upper left portion of the figure where there are no nontrivial equilibrium solutions.
0.8-
no non-trivial / equilibrium ~ C-wave only
0.6
0.4
0.2
82 G. LEDDER AND J. D. LOGAN
0 " i 2 3 . . . . ~, . . . . 5 . . . . 6 7 " 8
Figure 2. Regions in the/3fi parameter space corresponding to traveling wave solu- tions.
0.8
~ \ -.~ ......% ~ ~ -.~ ..., -..., ,,~....,-..., ... --...,_...~/ ,\
o.6 ~ \~ ",~"-, "~ '~"~ ",- "~ "~ "-, \, %-.."-,--,- .... .-///~/] '\ " '%(~ "~ '~ ". "'~ "<'%, "-, " - ~ ~ / / ! \
" ~ 7l i \
s0.4"- ~, ~ ~ ~ / 1 " \ \ ' \ \ "~ "~ ~ . . . . ~ t/" / ~ ! \ \ \ \
% ~ ~ / / 1 't ?,, ~, \
\ \ , \ $ \ ~ , 7 ~. ~ \ \ \ \ \
- ~ .,', % \ % % ' . . , i,,, ~ ~ ~ \ x,. - % ~,. ~ "ix % ,',, ~ ~ \ . ' . , . ~ ~,
' \ " .... 03 " "" b:n" " " "o~6~ ' " "o.~ U
Figure 3. A phase portrait with a C-wave: F(s) = 1 + 6s - 3s 2, o~ = 0 . 2 , /~ = 4 ,
~2 = 0.8.
T h e o r e m 1 gives the condi t ions for which a C-wave exists. In the example , the funct ion 9"
is negat ive , so the cond i t ion given in T h e o r e m 1 cor responds to the condi t ion g($) < 1. Th is
cond i t ion is met for ~ > (6 - / 3 ) / 3 . Since fi increases wi th $, a lower bound for $ co r re sponds to
a lower b o u n d for ft. We have the resul t t h a t a C-wave occurs if and on ly if
6/3 - / 3 2
3 + 6/3 - / 3 2 '
no te t h a t th is cond i t ion is in add i t i on to t he requ i rements for exis tence of an equ i l ib r ium s t a t e
wi th ~ < 1. Hence, t he region where a C-wave occurs is as shown in the figure.
T h e cond i t ions for an R-wave, as s t a t ed in T h e o r e m 2, yield the requ i rements t h a t g mus t be
increas ing on (0, $) (since g is concave down), and this occurs whenever ~ is less t h a n (6 - / 3 ) / 6 ,
where t he funct ion g achieves i ts max imum. Again , a bound on $ co r responds to a b o u n d on ~2,
Contamination and Remediation Waves 83
0 . 2 2 ' ~ \ . \ ,~ ~ ,~ ,~ ,~ h x, \ ,, ,, ,, ,,~ ~ ~ ~ \ ,,~
~' ~ \ k\ ', \ ', ', ',\\ \ \ \ ',\ " '\ 'k \/\ 0 .2 \ \ , \ \ \ , , , \ \ \ , \ , . . . ,
, , ,~ \,\', \, ,, , ',% .,, \., i\\i,., ,,2 ~-I, \ ', \ " \ . \ \ \ \ ',.k \ \ ", % ~ \, V ~ \ \
0 . 1 8 ', 'o \, ",, ~ ~ ', ' ', 'a ", .', .~ , , ,x, , -,' , ' \ . . . \ \ \ \ \ \ \ \ ' . - ,, \ \ \ ,, K . K ~
0 . 1 6 " ' , ', ', ' " \ t, ' , \ \ ", - .... \ \ ~ ~ \ \, "~ \ \ ',, ", \4 x, \, k, Y \ ", \ ,
"~ \ \ \,, \ \ \ \ \ ",, "~ ?~ ~, ~ / ~ , 5 3 , D. ,.\ S 0 . 1 2 \ \ \ ,,, \ ',, \, \ \ q \ \ ',, ~ J - - ~ , , ~ ' \ x ~ x N \ ' \ 0.1.~ ," \ ,, '3 '," "Y ' , '~ ' . ', ~ 7 / , , ~," " " "2 '~' k / ",
" ', ' , \ \ ~, L \. \. '~ \ i / % . X , > - ~ \ / ' \ \ % \ \ ,, \ , ,, \ \ ~ , o.o8! \ \~\, )(), ), ) ,~ ~ , ?, ?) 3 3' \ \ \ 'k \ \ ! . \ \ \ ' \ \
0 . 0 6 ' ; " '* '% \~ '~ \ [ ' ) / ' ~ " ~\ ' \ =\ ' \ '
0 . 0 4 ~ ' , ' \ X A ~ \ / '\. % ~ x \~ N \ \ \ \ \ X \. '\ \ ~ ' , ,'X,' 0 0 ,\ \ \ \ \ \ \ "\ ~ \ \ \
o.o q . . . . . 0.1 . . . . . . . . . . . . . . . 0 .2 0 .3 04 .
U
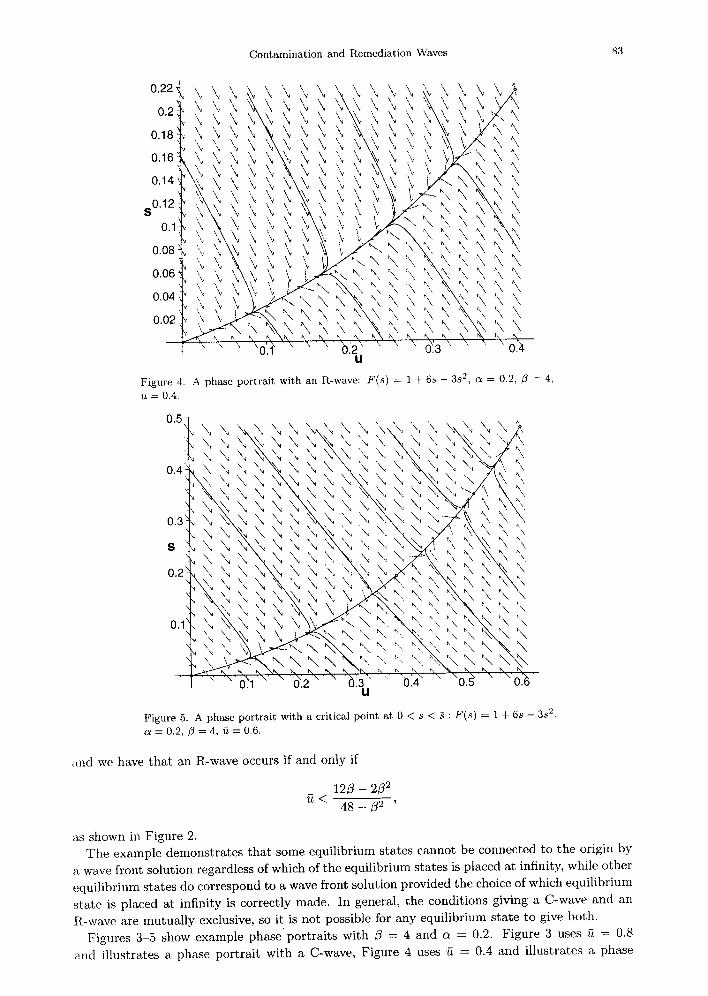
Figure 4. A phase portrai t with an R-wave: F ( s ) = 1 + 6 s - 3 s 2, a = 0.2, f l - - 4, ~ = 0.4.
0 . 5 - \ \.~ \ ~ \ \ \ \ \ \ N \ " \ x \ \ \, \ . a \ \ ), i~, \, \., \ ' % N \ N \ N \. \ , X \ , \, \ ' ) , \ ~ ....... / ',, \ a \ , x \ ", \ \ \ \ \ ;,, b\ \ , ", \ )X \., S i:- \ \ N \ , \ \ \ \ ' ~ " \ ? q \ \ . ' \ \', G , \.; N / ~ \ %, K \, q q "; X q ~ "~ ",'4,,", A q \G\~ "-~/\ \ ',, \ \ \ \ \ N~,N~ \ \ \ ' % \ ~ N , d . ~', ' \ \ "
" ~ . ~ xN ~ " ~ . , ' , . " x . \ . \ x ,
o.1 ~ : , bK\ ix '\ ~ , , ',\ o\ \ \ \
' "; \ ' 0 " ) . I \ U
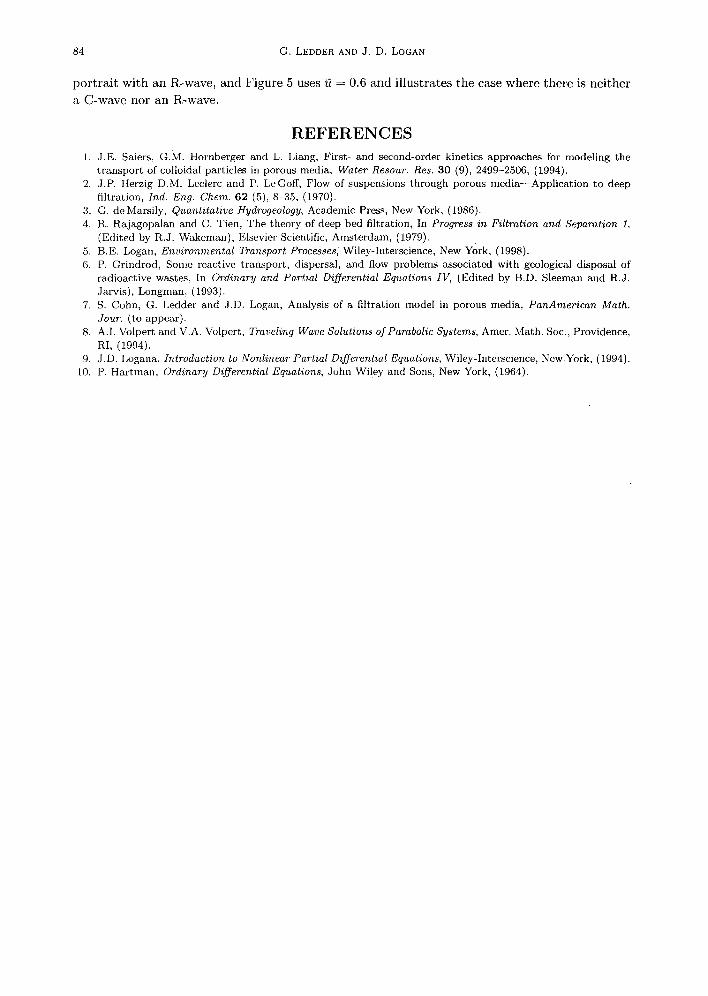
Figure 5. A phase portrai t with a critical point at 0 < s < ~ : F ( s ) = 1 + 6s - 3s 2,
c~ = 0.2, fl = 4, fi = 0.6.
a n d we h a v e t h a t a n R - w a v e o c c u r s if a n d o n l y if
1 2 f l - 2 f l 2
4 8 - f12
as s h o w n in F i g u r e 2. T h e e x a m p l e d e m o n s t r a t e s t h a t s o m e e q u i l i b r i u m s t a t e s c a n n o t b e c o n n e c t e d t o t h e o r i g i n b y
a w a v e f r o n t s o l u t i o n r e g a r d l e s s of w h i c h of t h e e q u i l i b r i u m s t a t e s is p l a c e d a t in f in i ty , w h i l e o t h e r
e q u i l i b r i u m s t a t e s d o c o r r e s p o n d t o a w a v e f r o n t s o l u t i o n p r o v i d e d t h e c h o i c e of w h i c h e q u i l i b r i u m
s t a t e is p l a c e d a t i n f i n i t y is c o r r e c t l y m a d e . I n g e n e r a l , t h e c o n d i t i o n s g i v i n g a C - w a v e a n d a n
R - w a v e a r e m u t u a l l y exc lus ive , so i t is n o t p o s s i b l e for a n y e q u i l i b r i u m s t a t e t o g ive b o t h .
F i g u r e s 3 - 5 s h o w e x a m p l e p h a s e p o r t r a i t s w i t h /3 = 4 a n d c~ = 0.2. F i g u r e 3 u se s fi = 0.8
a n d i l l u s t r a t e s a p h a s e p o r t r a i t w i t h a C - w ave , F i g u r e 4 uses g = 0 .4 a n d i l l u s t r a t e s a p h a s e
84 G. LEDDER AND J. D. LOGAN
p o r t r a i t w i t h an R-wave , and F i g u r e 5 uses fi = 0.6 and i l l u s t r a t e s t h e case w h e r e t h e r e is n e i t h e r
a C - w a v e nor an R-wave .
R E F E R E N C E S 1. J.E. Saiers, G.M. Hornberger and L. Liang, First- and second-order kinetics approaches for modeling the
transport of colloidal particles in porous media, Water Resour. Res. 30 (9), 2499-2506, (1994). 2. J.P. Herzig D.M. Leclerc and P. LeGoff, Flow of suspensions through porous media--Application to deep
filtration, Ind. Eng. Chem. 62 (5), 8-35, (1970). 3. G. deMarsily, Quantitative Hydrogeology, Academic Press, New York, (1986). 4. R. Rajagopalan and C. Tien, The theory of deep bed filtration, In Progress in Filtration and Separation 1,
(Edited by R.J. Wakeman), Elsevier Scientific, Amsterdam, (1979). 5. B.E. Logan, Environmental Transport Processes, Wiley-Interscience, New York, (1998). 6. P. Grindrod, Some reactive transport, dispersal, and flow problems associated with geological disposal of
radioactive wastes, In Ordinary and Partial Differential Equations IV, (Edited by B.D. Sleeman and R.J. Jarvis), Longman, (1993).
7. S. Cohn, G. Ledder and J.D. Logan, Analysis of a filtration model in porous media, PanAmerican Math. Jour. (to appear).
8. A.I. Volpert and V.A. Volpert, Traveling Wave Solutions of Parabolic Systems, Amer. Math. Soc., Providence, RI, (1994).
9. J.D. Logana, Introduction to Nonlinear Partial Differential Equations, Wiley-Interscience, New York, (1994). 10. P. Hartman, Ordinary Differential Equations, John Wiley and Sons, New York, (1964).