characterization of digital recording channels by means of echo cancellation techniques
TRANSCRIPT

4078 IEEE TRANSACTIONS ON MAGNETICS, VOL. 25, NO. 5, SEPTEMBER 1989
BY MEANS OF ECHO CANCELLATION TECHNIQUES CHARACTERIZATION OF DIGITAL RECORDING CHANNELS
J.W.M. Bergmans', S. Mita' and M. Izumita*
'Philips Research Labs, P.O. Box 80.000, 5600 JA Eindhoven, The Netherlands.
'Central Research Laboratories, Hitachi, Ltd., Kokubunji, Tokyo 185, Japan.
ABSTRACT - A simple yet accurate method is described for characterizing digital recording channels in terms of linear and nonlinear intersymbol interference and noise. The method is based on echo cancellation techniques, enables recorder operat- ing conditions close to actual use, and delivers a joint portrait of the disturbances rather than isolated assessments. Experi- mental results for a high-density digital video tape recorder are included.
1 Introduction Fig. 1. Adaptive channel characterization.
At high information densities, digital recording channels may be seriously hampered by linear intersymbol interference (ISI), additive noise and nonlinear IS1 [1,2]. Current methods to quan- tify these disturbances typically rely on experimental recording conditions with e.g. pseudorandom data or square waves [1,3]. These conditions may cause practical complications in fields like equalization and timing recovery, and may also alter the distur- bance constellation. To avoid such problems, it is desirable to characterize the channel in a mode of operation as close as pos- sible to actual use. The present paper deals with this topic. It exploits techniques which originated in echo cancellation [4] in a characterization method which combines the following desirable features:
Simplicity: Algorithmic complexity is governed by the LMS adaptation algorithm and a nonlinear canceller structure, neither of which are complicated.
Accuracy: In quantifying linear ISI, the method paral- lels its strongest predecessor 131. Unlike previous methods, nonlinear IS1 can also be quantified accurately. Arbitrary data can be recorded to enable a practical mode of opera- tion.
Comprehensiveness: Linear ISI, nonlinear IS1 and addi- tive noise can be jointly quantified. By contrast, previous methods yield isolated assessments. Possible interdepen- dencies between e.g. nonlinearities and noise are thereby hard to discover.
In return for these merits, noise estimates become less accurate as nonstationarities increase. This problem is, however, not nor- mally serious (51.
2 Characterization of linear channels In fig. 1, binary data ak E {-1,l) are applied to a discrete-time channel, which models the cascade of the actual continuous-time channel, a prefilter and a sampling operation. For mathematical convenience, we assume that the channel delivers exactly one
output symbol rk for every bit ak, i.e. that sampling occurs once per bit interval T , as usual for equalizing prefilters. It is easy to relax this assumption [3 ,5] . Linear IS1 and additive noise arising in the channel may be modelled as
where = [ak,.. .rak-M+l]T, "' denotes transposition, f = [ f ~ , ...,fM-l]T is the channel impulse response vector, and uk is noise of power U. The length M of both vectors is the channel memory length. Cancellation techniques may serve to estimate f and uk from the known signals ak and f k (fig. 1). To this end, ak is applied to a filter with impulse response vector f, whose output is subtracted from rk. This yields an error signal
In the usual case that ak and U k are statistically independent, the power U' = E[e:] of ek attains a global minimum U' = U when f is made to equal f. To accomplish this the LMS adaptation algorithm may be used, as in echo cancellation, where azL is an undesired echo and uk is to be reconstructed [4 ] . Upon convergence, f' and ek describe f and uk, respectively, provided that enough samples rk are available and that nonstationarities are insignificant. Conversely, when f fluctuates in time, tracking errors are, in general, inevitable (see section 5 ) .
3 Nonlinear channels For nonlinear channels we may write
rk = !(ah) + U k , ( 3 )
where f(.) is a deterministic function of a,. Since ak consists of M bits, f(ak) has 2M possible values. A nonlinear canceller is now needed to estimate f(.). An attractive structure is shown in fig. 2 for M = 3 [SI.
The 8 possible values of f(a) are reflected in a total of 8 coefficients. Generalization to M > 3 is straightforward. For a given order of nonlinearity p, there are (y ) data crossproducts
~18-9464/89/0900-4078$01 .WO1989 IEEE
- - ~~

4079
at
f'(Pk) c __c
Fig. 2. Volterra-decomposed canceller ( M = 3).
and coefficients. The total ( y ) + ( y ) + ... + (E) amounts to 2'. This shows that the representation is complete [6].
To account for nonlinearities, f' and f can be augmented with the nonlinear canceller coeffic&ts and the corresponding channel coefficients, and the associated data crossproducts can be added to a,. This leaves (1) and (2) valid. The augmented vectors have a length M' E { M , ..., 2 M } . For the system of sec- tion 6 , M' exceeds M only slightly, i.e. only a few nonlinearities are significant.
4 Quality measures We define the channel SNR as SNR = S / U , where
s = E I ( a : f ) 2 ] = E [ f T R f l (4)
is the received data power. Here R = E[.ka:] is the data auto- correlation matrix. Since ek serves as an estimate of uk we denote its power by U'. Similarly, we denote the power of aTfl by S'. This gives an estimated signal-to-noise ratio SNR' = S' /U' .
Due to the statistical independence of a,, f and uk, we have from (2) that
U' = ~ [ e i ] = E + U,
6 = E[(f - f)'R(f' - f ) I
( 5 )
(6) where
is the excess mean-square error due to imperfect cancellation. This nonnegative quality measure determines to what extent the estimated noise power reflects the actual one. Clearly, accurate noise characterization requires that t J U << 1. To assess how well - f' resembles f, we define the mean-square coefficient misadjust- ment
A = E[lf' - LIZ] = E[(f' - f ) T ( f ' - f ) I . (7)
Ideally, A should be much smaller than the &norm F = E[ l f l z ] Elf'fl of f.
For uncorrelated data R = I , the M' x M' identity matrix, As SNR= S / U , the normalized whence S = F and t = A.
inaccuracies EJU and A / F then obey
€ / U = SNRA/F. (8)
Hence for practical SNR's accurate noise characterization is much more difficult than accurate channel identification, a fact already hinted at in (31. For correlated data (8) is no longer strictly valid, but accurate noise characterization is bound to remain the more difficult task.
5 LMS properties
The LMS adaptation algorithm updates the time-dependent co- efficient vector f: recursiveIy as
f;+, f: $- pekak (9)
where p is a positive adaptation constant 141. convergence phases:
LMS has two
1. a transition phase, in which an initial misadjustment of the coefficients is gradually lowered, and
2. a steady state, in which transient errors have become negli- gible compared to tracking errors and random fluctuations of the coefficients about their average settings.
In practice the length N of the replayed signal is almost always finite, and transient errors are a potential problem. A solution is:
1. to bridge the transition phase, one or more LMS passes are performed, and the final coefficient vector fL-l of the previous pass is used as a starting point for the next;
2. when transient effects have died out, the actual charader- ization is performed with the aid of a final LMS pass.
Since the only objective of the transition passes is to reach the steady state, a large step size p (e.g. 1/M' - 1/2M' [4]) may be used for fast convergence. Higher order transients may be eliminated by preceding the final pass by one or more transition passes with successively smaller step sizes. The final pass can be started upon stabilization of U' or SNR' as monitored across transition passes. For practical values of M ' , N and p, a total of about three passes may be sufficient [SI.
In steady state, E consists of two independent contributions: a gradient error e,, = ,uM'U/(2 - p M ' ) due to random fluctua- tions of the coefficients around their average settings 141, and a
lag error due to tracking errors. In the practical event that nonstationarities are due to gain variations, €1 is insignificant whenever the variations are sufficiently small in magnitude or bandwidth [ 5 ] . As to A , we have seen that A = E when ak is un- correlated. For correlated data the gradient and lag components of A should still approximate those of E . For small egr the final pass should involve a small step size p. Conversely, optimum tracking necessitates a large step size. In practice, p = T7 - T9 may be a fair compromise [5].
6 Example Results in this section pertain to an improved version of the ex- perimental digital video tape recorder (VTR) of [7]. Partly as a consequence of its very high information density (133 Kb/inch at 30 pm track width), this system has a rather poor SNR, and gain variations are far from negligible. To characterize this chan- nel, its equalized output signal was sampled at the bit rate (46 Mb/s), converted into digital format (6 bits/sample) and stored. Since the equalizer is of the full-response type it performs a pseudo-integration which strongly enhances low frequencies. To overcome consequential DC-problems like baseline wander and increased timing jitter, characterization was based on a data se- quence with around 15 dB suppression of frequencies below 1 MHz, interspersed at regular intervals with special patterns for the synchronization hardware of the recorder. Previous charac-
4080
2
i*. -24 . . . . , . . . . , . . . . , , . , ,
0 5 0 0 1000 1 5 0 0 2 0 0 0
-k
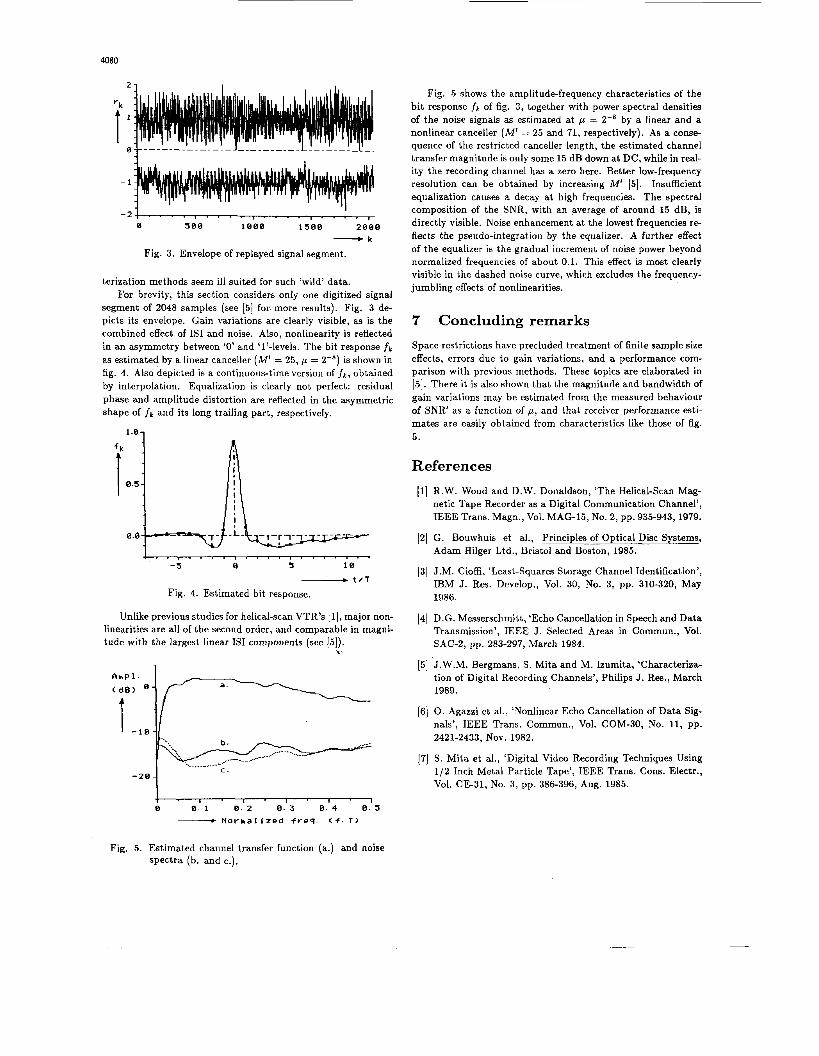
Fig. 3. Envelope of replayed signal segment.
terization methods seem ill suited for such ‘wild’ data. For brevity, this section considers only one digitized signal
segment of 2048 samples (see [5] for more results). Fig. 3 de- picts its envelope. Gain variations are clearly visible, as is the combined effect of IS1 and noise. Also, nonlinearity is reflected in an asymmetry between ‘0’ and ‘1’-levels. The bit response fk
as estimated by a linear canceller (M‘ = 25, p = 2T8) is shown in fig. 4. Also depicted is a continuous-time version of f k , obtained by interpolation. Equalization is clearly not perfect: residual phase and amplitude distortion are reflected in the asymmetric shape of fk and its long trailing part, respectively.
1.0,
. . . . . . . . . . . . . . . . . . . . . - 5 0 5 1 0
Fig. 4. Estimated bit response. A t / T
Unlike previous studies for helical-scan VTR’s [ 11, major non- linearities are all of the second order, and comparable in magni- tude with the largest linear IS1 components (see 151).
t
> ,_.... .- .. .____. ._....... ~ . ...__.__. .____..
.- ...._____.... ..-. C .
- 2 0
t . I . I . I . I . 1 0. 1 0. 2 0. 3 0. 4 0 . 5 - N o v h a l i z e d f v e q . t + . T )
Fig. 5 shows the amplitude-frequency characteristics of the bit response f k of fig. 3, together with power spectral densities of the noise signals as estimated at p = 2-’ by a linear and a nonlinear canceller (M‘ = 25 and 71, respectively). As a conse- quence of the restricted canceller length, the estimated channel transfer magnitude is only some 15 dB down at DC, while in real- ity the recording channel has a zero here. Better low-frequency resolution can be obtained by increasing M‘ [5]. Insufficient equalization causes a decay at high frequencies. The spectral composition of the SNR, with an average of around 15 dB, is directly visible. Noise enhancement at the lowest frequencies re- flects the pseudo-integration by the equalizer. A further effect of the equalizer is the gradual increment of noise power beyond normalized frequencies of about 0.1. This effect is most clearly visible in the dashed noise curve, which excludes the frequency- jumbling effects of nonlinearities.
7 Concluding remarks Space restrictions have precluded treatment of finite sample size effects, errors due to gain variations, and a performance com- parison with previous methods. These topics are elaborated in [5]. There it is also shown that the magnitude and bandwidth of gain variations may be estimated from the measured behaviour of SNR’ as a function of p, and that receiver performance esti- mates are easily obtained from characteristics like those of fig. 5.
References
111
121
131
141
151
[GI
I71
R.W. Wood and D.W. Donaldson, ‘The Helical-Scan Mag- netic Tape Recorder as a Digital Communication Channel’, IEEE Trans. Magn., Vol. MAG-15, No. 2, pp. 935-943,1979.
G. Bouwhuis et al., Principles of Optical Disc Systems, Adam Hilger Ltd., Bristol and Boston, 1985.
J.M. Cioffi, ‘Least-Squares Storage Channel Identification’, IBM J. Res. Develop,, Vol. 30, No. 3, pp. 310-320, May 1986.
D.G. Messerschmitt, ‘Echo Cancellation in Speech and Data Transmission’, IEEE J. Selected Areas in Commun., Vol. SAC-2, pp. 283-297, March 1984.
J.W.M. Bergmans, S. Mita and M. Izumita, ‘Characteriza- tion of Digital Recording Channels’, Philips J. Res., March 1989.
0. Agazzi et al., ‘Nonlinear Echo Cancellation of Data Sig- nals’, IEEE Trans. Commun., Vol. COM-30, No. 11, pp. 2421-2433, NOV. 1982.
S. Mita et al., ‘Digital Video Recording Techniques Using 1/2 Inch Metal Particle Tape’, IEEE Trans. Cons. Electr., Vol. CE-31, NO. 3, pp. 386-396, Aug. 1985.
Fig. 5. Estimated channel transfer function (a.) and noise spectra (b. and c.).