calculul si c autovehiculelor r 1
DESCRIPTION
C si Constructia A Rutiere 1TRANSCRIPT
1
CALCULUL SI CONSTRUCTIA AUTOVEHICULELOR
RUTIERE
STUDENT: Profesor indrumator:
2
Tema proiectului
Pentru autovehiculul Bmw e46 – 1.9, benzina, sa se proiecteze urmatoarele piese componente:
a) Ambreajul. Mecanismul de actionare.
b) Cutia de viteze.
Etapele de calcul:
1. Trasarea caracteristicii externe;
2. Dimensionarea ambreiajului şi a mecanismului de acţionare ;
3. Calculul arcului cu diafragmă;
4. Calculul arborelui ambreiajului;
5. Calculul cutiei de viteze mecanice;
Date initiale :
G0= 1280 Kg
Vmax= 170 km/h
Pmax= 77 Kw la 5300 rot/min
Mmax= 165 N*m la 2500 rot/min
Np= 5 persoane
Diam. Janta 15
Balonaj 195 0.195 m
C inaltime 65 0.65 m
Lungime= 4410 mm 4.41 m
Latime 1740 mm 1.74 m
Inaltime= 1420 mm 1.42 m
Etapa nr. 1 Trasarea caracteristicii externe
1.Trasarea caracteristicii externe. (caracteristica de turatie la sarcina totala).
Pentru calculul organelor de transmisie este necesara trasarea acestei caracteristici la scara.
Caracteristica va rezulta in urma calculelor din aceasta etapa.
a) Trasarea curbei de putere.
Pentru trasarea curbei de putere se calculeaza puterea la viteza maxina Pv max si puterea
maxina dezvoltata de motor P max.

3
-𝑷𝒗𝒎𝒂𝒙= puterea la viteză maximă;
-𝑷𝒎𝒂𝒙= puterea maximă dezvoltată de motor.
𝑃𝑣𝑚𝑎𝑥 =𝐺𝑎 · 𝑓 · 𝑉𝑚𝑎𝑥 +
𝐾·𝐴·𝑉𝑚𝑎𝑥3
13
370 · 𝜂𝑡 [𝑘𝑤]
-𝐺𝑎 = 𝑚𝑎𝑠𝑎 𝑚𝑎𝑥𝑖𝑚ă 𝑎𝑢𝑡𝑜𝑟𝑖𝑧𝑎𝑡ă = 1755 [𝐾𝑔] -𝑓 = 𝑐𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡 𝑑𝑒 𝑟𝑒𝑧𝑖𝑠𝑡𝑒𝑛ţă 𝑙𝑎 𝑟𝑢𝑙𝑎𝑟𝑒 =0.0302
𝑣 = 47.22 [𝑚/𝑠]
𝑓 = 1.65 · 10−2 · 1 + 6.9/(10−3 · 170 − 50 ) = 0.0302
-𝑘 = 𝑐𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡 𝑎𝑒𝑟𝑜𝑑𝑖𝑛𝑎𝑚𝑖𝑐 [𝑑𝑎𝑁 · 𝑠2 ·𝑚−4] 𝑘 = 0.02 ÷ 0.035 ⇒ 𝑘 = 0.02
- 𝐴 = 𝑎𝑟𝑖𝑎 𝑠𝑒𝑐ţ𝑖𝑢𝑛𝑖𝑖 𝑡𝑟𝑎𝑛𝑠𝑣𝑒𝑟𝑠𝑎𝑙𝑒 [𝑚2] 𝐴 = 𝐻 · 𝑙 · 𝐶𝑒 ; unde : - 𝐻 = î𝑛ă𝑙ţ𝑖𝑚𝑒𝑎 𝑎𝑢𝑡𝑜𝑣𝑒𝑖𝑐𝑜𝑙𝑢𝑙𝑢𝑖;
- 𝑙 = 𝑙ăţ𝑖𝑚𝑒𝑎 𝑎𝑢𝑡𝑜𝑣𝑒𝑖𝑐𝑜𝑙𝑢𝑙𝑢𝑖; -𝐶𝑐 = 0.95
𝐴 = 1.420 ∙ 1.710 ∙ 0.95 = 2.347 [𝑚2] -𝜂𝑡 = 𝑟𝑎𝑛𝑑𝑎𝑚𝑒𝑛𝑡𝑢𝑙 𝑡𝑟𝑎𝑛𝑠𝑚𝑖𝑠𝑖𝑒𝑖 0.88 ÷ 0.92 ⇒ 𝜂𝑡 = 0.92
-𝑉𝑚𝑎𝑥 =]170 𝑘𝑚/] = 47.22 [𝑚/𝑠]
-𝛼 max= 19°
𝑃𝑣𝑚𝑎𝑥 =1755 ∙ 0.0302 ∙ 47.22 +
0.02∙2.347 ∙47.223
13
370 · 0.92= 79.20 [𝐶𝑃]
Puterea dezvoltata de motor se calculeaza pornind de la puterea la viteza maxima:
𝑃𝑚𝑎𝑥 = 𝑃𝑣𝑚𝑎𝑥
𝑓 · 𝑛𝑣𝑚𝑎𝑥
𝑛𝑝
𝑓 · 𝑛𝑣𝑚𝑎𝑥𝑛𝑝
= 𝛼1 ·𝑛𝑣𝑚𝑎𝑥𝑛𝑝
+ 𝛼2 · (𝑛𝑣𝑚𝑎𝑥𝑛𝑝
)2 + 𝛼3 · (𝑛𝑣𝑚𝑎𝑥𝑛𝑝
)3,
𝑢𝑛𝑑𝑒 𝛼1,𝛼2,𝛼3 𝑠𝑢𝑛𝑡 𝑐𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛ţ𝑖 𝑐𝑒 𝑑𝑒𝑝𝑖𝑛𝑑 𝑑𝑒 𝐶𝑒(𝑐𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡 𝑑𝑒 𝑒𝑙𝑎𝑠𝑡𝑖𝑐𝑖𝑡𝑎𝑡𝑒)
𝐶𝑒 = 𝑛𝑀𝑛𝑝
=2500
5300= 0.472
𝛼1 = 3 − 4 · 𝐶𝑒
2 · (1− 𝐶𝑒)= 1.05
𝛼2 = 2 · 𝐶𝑒
2 · (1 − 𝐶𝑒)= 0.89
4
𝛼3 = −1
2 · 1− 𝛼3 = −0.95
𝑛𝑣𝑚𝑎𝑥𝑛𝑝
= 1.05 ÷ 1.25 𝑀.𝐴. 𝑆0.9 ÷ 1 𝑀.𝐴.𝐶
⇒𝑛𝑣𝑚𝑎𝑥𝑛𝑝
= 1.1
𝛼1 + 𝛼2 + 𝛼3 = 1
𝑓 · 𝑛𝑣𝑚𝑎𝑥𝑛𝑝
= 1.05 · 1.1 + 0.89 · (1.1)2 + (−0.95) · (1.1)3 = 0.98
𝑃𝑚𝑎𝑥 =77
1.1= 80.85 [𝐶𝑃]
Din datele initiale se adopta turatia la putere maxima np apoi se calculeaza nv max, respectand
plajele uzuale din valori:
𝑛𝑚𝑎𝑥 = (1.05 ÷ 1.25) · 𝑛𝑝 𝑀.𝐴. 𝑆
(0.9 ÷ 1) · 𝑛𝑝 𝑀.𝐴.𝐶 ⇒ 𝑛𝑣𝑚𝑎𝑥 = 1.1 · 5300 = 5830[𝑟𝑜𝑡/𝑚𝑖𝑛]
In acest punct se verifica daca raportul 𝐾𝑛 =𝑛𝑚𝑎𝑥
𝑉𝑚𝑎𝑥 unde 𝑛𝑚𝑎𝑥 [𝑟𝑜𝑡/𝑚𝑖𝑛] si 𝑉𝑚𝑎𝑥 [𝑘𝑚/].
𝐾𝑛 =𝑛𝑚𝑎𝑥𝑉𝑚𝑎𝑥
=5830
170= 34.29
Calculul puterii efective, descris in cele din urma se poate face tabelat, pentru valori ale
turatiei cuprinse intre 𝑛min 𝑠𝑡𝑎𝑏𝑖𝑙 – turatia minima stabila si 𝑛𝑚𝑎𝑥 , cu pasul de 100 rpm. La
obtinerea valorii de maxim a puterii efective 𝑃𝑒 = 𝑃𝑚𝑎𝑥 - pentru n = 𝑛𝑝 pasul se poate micsora,
inainte si dupa 𝑛𝑝 la 50 rpm, pentru o buna evidentiere a zonei de maxim.
Astfel, se stabileste turatia minima stabila:
𝑛min 𝑠𝑡𝑎𝑏𝑖𝑙 = 𝑛𝑚𝑖𝑛 + 100 ÷ 200 [𝑟𝑜𝑡/𝑚𝑖𝑛] = 795 + 105 = 900 [𝑟𝑜𝑡/𝑚𝑖𝑛] 𝑛𝑚𝑖𝑛 = 0.2 · 𝑛𝑝 = 0.15 · 5300 = 795 [𝑟𝑜𝑡/𝑚𝑖𝑛]
𝑃𝑒(𝑛) –puterea efectiva la turatia n este data de relatia
𝑃𝑒 = 𝑃𝑣𝑚𝑎𝑥 · [𝛼1 ·𝑛
𝑛𝑝+ 𝛼2 · (
𝑛
𝑛𝑝)2 + 𝛼3 · (
𝑛
𝑛𝑝)3] [𝐾𝑊]
unde 𝑛 = 𝑛min 𝑠𝑡𝑎𝑏𝑖𝑙 , 𝑛min 𝑠𝑡𝑎𝑏𝑖𝑙 + 100, 𝑛min 𝑠𝑡𝑎𝑏𝑖𝑙 + 200...,𝑛𝑚𝑎𝑥
b)Curba de moment:
Momentul efectiv la o turaţie dată (n)
𝑀𝑒(𝑛) = 9.55 · 103 ·𝑃𝑒𝑛𝑒
[𝑁 ·𝑚]
-𝑃𝑒este în [KW];
-𝑛 este în [rpm];
c) Curba de consum specific:
𝑐𝑒(𝑛) = 𝑐𝑚𝑖𝑛 ·𝑀𝑚𝑎𝑥
𝑀𝑒(𝑛) [𝑔/𝐾𝑊 · ]
5
𝑐𝑚𝑖𝑛 = 300
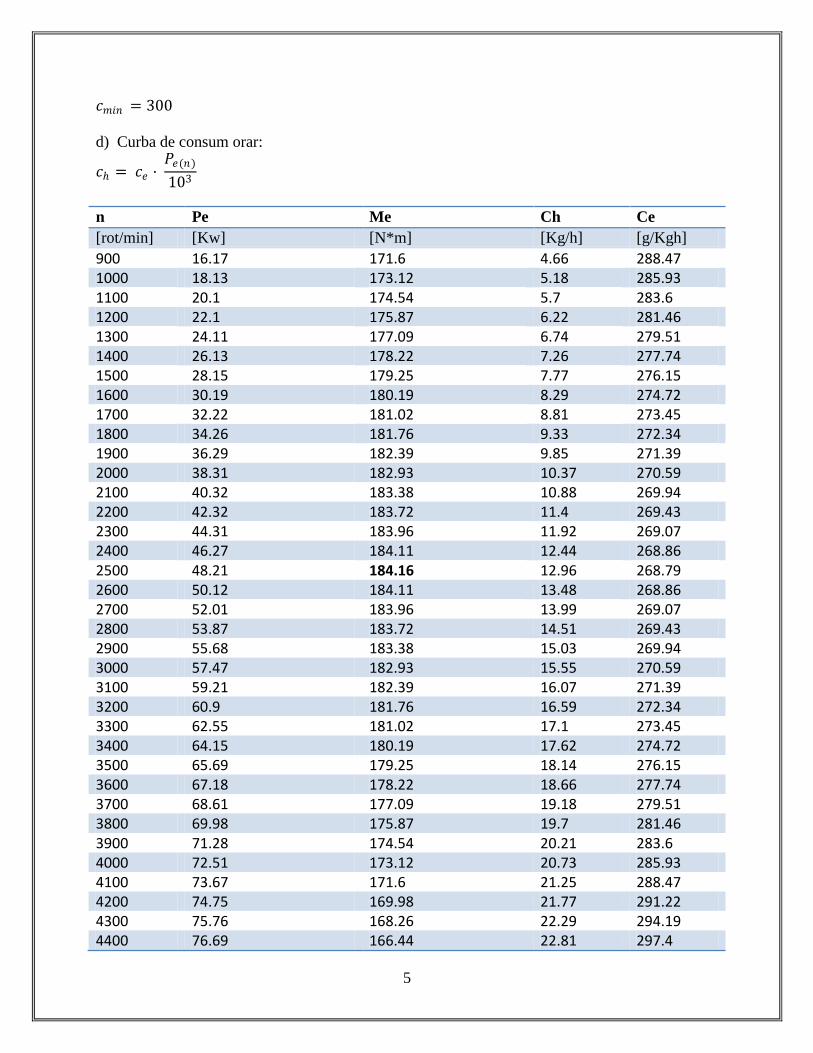
d) Curba de consum orar:
𝑐 = 𝑐𝑒 · 𝑃𝑒(𝑛)
103
n Pe Me Ch Ce
[rot/min] [Kw] [N*m] [Kg/h] [g/Kgh]
900 16.17 171.6 4.66 288.47
1000 18.13 173.12 5.18 285.93
1100 20.1 174.54 5.7 283.6
1200 22.1 175.87 6.22 281.46
1300 24.11 177.09 6.74 279.51
1400 26.13 178.22 7.26 277.74
1500 28.15 179.25 7.77 276.15
1600 30.19 180.19 8.29 274.72
1700 32.22 181.02 8.81 273.45
1800 34.26 181.76 9.33 272.34
1900 36.29 182.39 9.85 271.39
2000 38.31 182.93 10.37 270.59
2100 40.32 183.38 10.88 269.94
2200 42.32 183.72 11.4 269.43
2300 44.31 183.96 11.92 269.07
2400 46.27 184.11 12.44 268.86
2500 48.21 184.16 12.96 268.79
2600 50.12 184.11 13.48 268.86
2700 52.01 183.96 13.99 269.07
2800 53.87 183.72 14.51 269.43
2900 55.68 183.38 15.03 269.94
3000 57.47 182.93 15.55 270.59
3100 59.21 182.39 16.07 271.39
3200 60.9 181.76 16.59 272.34
3300 62.55 181.02 17.1 273.45
3400 64.15 180.19 17.62 274.72
3500 65.69 179.25 18.14 276.15
3600 67.18 178.22 18.66 277.74
3700 68.61 177.09 19.18 279.51
3800 69.98 175.87 19.7 281.46
3900 71.28 174.54 20.21 283.6
4000 72.51 173.12 20.73 285.93
4100 73.67 171.6 21.25 288.47
4200 74.75 169.98 21.77 291.22
4300 75.76 168.26 22.29 294.19
4400 76.69 166.44 22.81 297.4

6
4500 77.53 164.53 23.32 300.86
4600 78.28 162.52 23.84 304.59
4700 78.94 160.4 24.36 308.59
4800 79.51 158.2 24.88 312.9
4900 79.98 155.89 25.4 317.53
5000 80.36 153.48 25.92 322.51
5100 80.63 150.98 26.43 327.86
5200 80.79 148.38 26.95 333.6
5300 80.85 145.68 27.47 339.79
Diagrama.
2.Determinarea raportului transmisiei principale 𝒊𝟎
Transmisia principală are rolul de a multiplica momentul motor primit de la transmisia
longitudinală şi de a-l transmite, cu ajutorul diferenţialului, arborilor planetari.
Se face din conditia de viteza maxima a autovehiculului in treapa de viteza cu raport unitar
(𝑖𝑐𝑣1).
𝑖0 =𝜋 · 𝑛𝑣𝑚𝑎𝑥 · 𝑟𝑟
30 · 𝑉𝑚𝑎𝑥
-𝑉𝑚𝑎𝑥 [𝑚/𝑠] -𝑛𝑣𝑚𝑎𝑥 [𝑟𝑜𝑡/𝑚𝑖𝑛] -𝑟𝑟 − 𝑟𝑎𝑧𝑎 𝑑𝑒 𝑟𝑢𝑙𝑎𝑟𝑒 [𝑚]

7
𝑟𝑟 =𝑑
2+ 𝐻
𝑑 = 15 ∙ 25,4 ∙ 10−3 = 0.38
𝐻 = 0.65 ∙ 195 ∙ 10−3 = 0.13
𝑟𝑟 =𝑑
2+ 𝐻 =
0.38
2+ 0.13 = 0.320 [𝑚]
𝑖0 =𝜋 · 5830 · 0.320
30 · 47.22= 4.1
3.Etajarea cutiei de viteză
Raportul de transmitere in trepta 1 se determina din conditia de panta maxima impusa,
pant ape care autovehiculultrebuiesa o urce in aceeasitreapta de viteza, cu
motorulfunctionandpecaracteristica de turatie la sarcinatotala, la turatie de cuplu maxim, 𝑛𝑀 .
Forta la roata sau forta de tractiune necesara in acest caz este:
𝐹𝑟′ = 𝐹𝑡𝑚𝑎𝑥 = 𝐺𝑎 · (𝑓 · cos𝛼𝑚𝑎𝑥 + sin𝛼𝑚𝑎𝑥 ) [𝑁]
-𝐺𝑎 = 𝑔𝑟𝑒𝑢𝑡𝑎𝑡𝑒𝑎 𝑎𝑢𝑡𝑜𝑣𝑒𝑖𝑐𝑜𝑙𝑢𝑙𝑢𝑖 = 17216.55 𝑁
-𝛼𝑚𝑎𝑥 = 19∘ - 𝑓 = 𝑐𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡 𝑑𝑒 𝑟𝑒𝑧𝑖𝑠𝑡𝑒𝑛ţă 𝑙𝑎 𝑟𝑢𝑙𝑎𝑟𝑒 = 1.65 · 10−2 · 1 + 6.5 · 10−3 · 𝑣 − 50 = 0.015
𝐹𝑟′ = 𝐹𝑡𝑚𝑎𝑥 = 17216.55 · 0.015 · cos 19∘ + sin 19∘ = 5846.62 [𝑁]
Rapoartele de transmitere ale schimbatorului de viteze sunt in progresie geometrica, cu o ratie
g =𝑛2
𝑛1( ratie de etajare). Ratia progresiei geometrice si numarul de trepte de viteza sunt alese
astfel incat sa fie indeplinita conditia 𝑉𝑚𝑎𝑥 𝑡𝑟𝑒𝑎𝑝𝑡𝑎𝑖𝑛𝑓𝑒𝑟𝑖𝑜𝑎𝑟 ă
= 𝑉𝑚𝑖𝑛 𝑡𝑟𝑒𝑎𝑝𝑡𝑎𝑠𝑢𝑝𝑒𝑟𝑖𝑜𝑎𝑟 ă
.
Cele doua turatii n1 si n2 sunt turatii intre care motorul functioneaza stabil si trebuie sa
indeplineasca conditia 𝑛𝑀 ≤ 𝑛1 < 𝑛2 ≤ 𝑛𝑉𝑚𝑎𝑥 .
Pentru treapta k de viteza avem 𝑖𝑐𝑘 = 𝑖𝑐𝑣𝐼/𝑞^(𝐾 − 1) . Considerand „k” treapta maxima de viteze ca fiind treapta cu raport unitar (fara treapta de
supraviteza) vom avea 𝑖𝑐𝑣𝑘 = 1 ⇒ 𝑞𝐾−1 = 𝑖𝑐𝑣𝐼 ⇒ 𝐾 = 1 +𝑙𝑛 ·𝑖𝑐𝑣𝐼
𝑙𝑛 ·𝑞,
unde „k” va fi numărul treptei de viteză maximă (3,4,5...).
𝑖𝑐𝑣𝐼 =𝐹𝑡𝑚𝑎𝑥 · 𝑟𝑟
𝑀𝑚𝑎𝑥 · 𝑖0 · 𝜂𝑡=
5846.62 · 0.32
184.16 · 4.1 · 0.92= 2.67
Pentru calculul efectiv se procedeaza mai intai la stabilirea unei ratii de etajare initiala „g”
considerand pentru inceput

8
𝑞∙ =𝑛𝑉𝑚𝑎𝑥𝑛𝑀
=5830
2500= 2.33
de unde rezulta numarul minim al treptelor de viteza va fi
𝐾𝑚𝑖𝑛 ≥ 1 +𝑙𝑛 · 𝑖𝑐𝑣𝐼𝑙𝑛 · 𝑞∙
≥ 2.16 ⇒ 𝐾𝑚𝑖𝑛 = 3
𝐾 = 𝐾𝑚𝑖𝑛 + 1 = 4
.
Se rotunjeste 𝐾𝑚𝑖𝑛 la valoarea imediat superioara si obtinem numarul treptelor de viteza, k.
𝐾𝑚𝑖𝑛 ≥ 1 +𝑙𝑛 · 𝑖𝑐𝑣𝐼𝑙𝑛 · 𝑞∙
+ 1
Cu aceasta noua valoare „k” se calculeaza apoi ratia de etajare a cutiei de viteze
𝑞 = 𝑖𝑐𝑣𝐼𝐾−1 = 2.67
4−1= 1.39
- ratia care sa utilizeaza in calculul celorlalte trepte de viteza.
Daca se doreste adaptarea unei trepte de supraviteza se stabileste raportul acesteia
𝑖𝐶𝑉𝐾+1= 0.7 ÷ 0.8
𝑖𝑐𝑣𝐼𝐼 =𝑖𝑐𝑣𝐼𝑞
=2.67
1.39= 1.92
𝑖𝑐𝑣𝐼𝐼𝐼 =𝑖𝑐𝑣𝐼𝑞2
=2.67
1.39^2= 1.39
𝑖𝑐𝑣𝐼𝑉 =𝑖𝑐𝑣𝐼𝑞3
=2.67
1.39^3= 1
9
Etapa nr. 2 Proiectarea Ampreiajului
În calculul ambreiajului se va ţine cont de valorile obţinute în etapa anterioară, valori ce
urmăresc stabilirea dimensiunilor elementelor principale ale acestuia.
Pmax=80.85 [Kw]
Mpax=184.2 [N*m]
Np=5300 [Rot/min]
Nm=2500 [Rot/min]
Ambreiajul are rolul de a decupla motorul de transmisia autovehicolului, precum şi de a asigura
cuplarea progresivă a motorului cu transmisia. În transmisia automobilului ambreiajul se
foloseşte atât ca un mecanism independent, intercalat între motor şi schimbătorul de viteze, cât şi
ca un organ al mecanismului de acţionare a schimbătoarelor de viteze planetare. Decuplarea
motorului de transmisie este necesară:
la pornirea din loc a automobilului;
în timpul mersului automobilului la schimbarea treptelor schimbătorului de viteze;
la frânarea automobilului (pentru viteze mai mici decât cele corespunzătoare mersului în gol a
motorului);
la oprirea automobilului cu motorul în funcţiune;
la pornirea motorului pe timp de iarnă.
Cuplarea progresivă a motorului cu transmisia este necesară în cazurile:
la pornirea din loc a automobilului;
după schimbarea treptelor schimbătorului de viteze.
Ambreiajul are şi rol de element de siguranţă, protejând transmisia la apariţia unor suprasarcini; astfel,
atunci când încărcarea transmisiei depăşeşte momentul static de frecare al ambreiajului, acesta patinează.
Ambreiajul trebuie să răspundă unor cerinţe specifice şi generale cum ar fi:
Condiţii impuse la cuplare:
cuplarea progresivă, evitându-se şocurile asupra pasagerilor şi în organele transmisiei;
evacuarea eficientă a căldurii generate în faza de patinare a ambreiajului (creşterea temperaturii
garniturilor de fricţiune conduce la scăderea coeficientului de frecare, ceea ce poate produce
patinarea ambreiajului chiar şi atunci când acesta este complet cuplat);
în stare cuplată, ambreiajul trebuie să asigure transmiterea mişcării de la motor către transmisie
chiar şi atunci când garniturile de fricţiune sunt uzate.
Cuplarea ambreiajului trebuie să se facă progresiv pentru ca să nu apară acceleraţii excesiv de
mari la demararea automobilului, care au o influenţă asupra pasagerilor şi încărcăturii.
Acceleraţia maximă admisibilă la demararea automobilului, care nu provoacă senzaţii neplăcute
pasagerilor, nu trebuie să depăşească 3 ... 4 m/s2. De menţionat că automobilele echipate cu
motoare cu rezervă mare de putere permit obţinerea unor acceleraţii cu mult mai mari.
10
La deplasarea pe un drum asfaltat, având coeficientul de aderenţă p=0,7 . .. 0,8, acceleraţiile
maxime care se pot obţine la un automobil cu tracţiune integrală sunt de 7 ... 8 m/s2. Rezultă deci,
necesitatea cuplării progresive a ambreiajului pentru a limita acceleraţiile la demararea
automobilului.
În timpul patinării ambreiajului, care are loc în special în momentul pornirii din loc şi în mai
mică măsură la schimbarea treptelor în timpul mersului, lucrul mecanic de frecare se transformă
în căldură.
Pentru funcţionarea ambreiajului în condiţii normale, căldura care se degajă trebuie să fie
eliminată, în caz contrar temperatura garniturilor de frecare creşte, iar coeficientul de frecare va
scădea. În felul acesta, ambreiajul va patina şi în timpul mersului automobilului, nu numai în
timpul pornirii din loc sau la schimbarea treptelor. Datorită acestui fapt piesele componente ale
ambreiajului se încălzesc peste limita admisibilă, iar garniturile de frecare se degradează şi discul
de presiune se poate deforma, iar în unele cazuri chiar fisura.
Ambreiajul trebuie să fie capabil să transmită momentul motor maxim chiar şi în cazul în care
garniturile de frecare sunt uzate şi arcurile de presiune îşi reduc forţa de apărare. Pentru
îndeplinirea acestei cerinţe momentul de calcul al ambreiajului se adoptă mai mare decât
momentul maxim al motorului .
Condiţii impuse la decuplare:
decuplarea completă şi rapidă a motorului de transmisie- astfel se asigură schimbarea
uşoară a treptei de viteză, reducându-se uzurile danturilor pinioanelor, precum şi cele ale
garniturilor de fricţiune;
efort relativ mic din partea conducătorului prin acţionarea pedalei, la o cursă nu prea mare
a acesteia.
Dacă decuplarea ambreiajului nu este completă, schimbarea treptelor se face cu zgomot,
deoarece roţile dinţate ale schimbătorului de viteze se află sub sarcină parţială. Acest lucru
conduce la uzura părţilor frontale ale dinţilor pinioanelor sau cuplajelor.
De asemenea dacă decuplarea ambreiajului nu este completă, iar schimbătorul de viteze se
găseşte într-o treaptă oarecare, atunci în timp ce motorul funcţionează, ambreiajul patinează, iar
părţile sale componente se încălzesc şi garniturile de frecare se uzează.
Uşurinţa decuplării ambreiajului este asigurată în primul rînd prin alegerea corectă a raportului
de transmitere al mecanismului de acţionare.
Condiţii generele impuse ambreiajului
În afară de condiţiile impuse ambreiaului la decuplare şi cuplare, acesta trebuie să mai
îndeplinească următoarele : să aibă durata de serviciu şi rezistenţa la uzură cât mai mare; să aibă
o greutate proprie cât mai redusă; să ofere siguranţă în funcţionare; să aibă o construcţie simplă
şi ieftină; parametrii de bază să varieze cât mai puţin în timpul exploatării; să aibă dimensiuni
reduse, dar să fie capabil să transmită un moment cât mai mare; să fie echilibrat dinamic; să fie
uşor de întreţinut.
Durata de funcţionare a ambreiajului depinde de numărul cuplărilor şi decuplărilor, deoarece
garniturile de frecare se uzează mai ales la patinarea ambreiajului. La fiecare cuplare lucrul
mecanic de frecare la patinare se transformă în căldură datorită căreia temperatura de lucru a
garniturilor de frecare creşte. Experimental s-a constatat că la creşterea temperaturii de la 20°C la
100°C, uzura garniturilor de frecare se măreşte aproximativ de două ori.
11
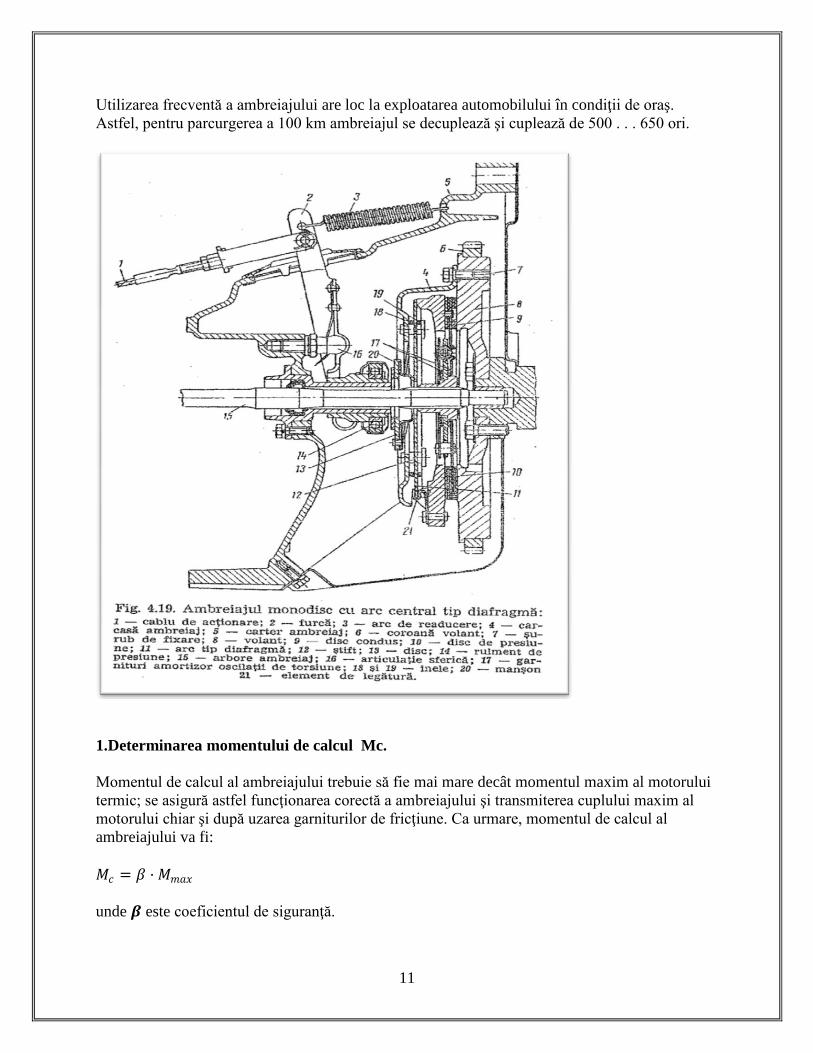
Utilizarea frecventă a ambreiajului are loc la exploatarea automobilului în condiţii de oraş.
Astfel, pentru parcurgerea a 100 km ambreiajul se decuplează şi cuplează de 500 . . . 650 ori.
1.Determinarea momentului de calcul Mc.
Momentul de calcul al ambreiajului trebuie să fie mai mare decât momentul maxim al motorului
termic; se asigură astfel funcţionarea corectă a ambreiajului şi transmiterea cuplului maxim al
motorului chiar şi după uzarea garniturilor de fricţiune. Ca urmare, momentul de calcul al
ambreiajului va fi:
𝑀𝑐 = 𝛽 ·𝑀𝑚𝑎𝑥
unde 𝜷 este coeficientul de siguranţă.
12
Tipul autovehiculului 𝜷
Autoturisme 1,3÷1,75
Autocamioane, autobuze 1,6÷2,0
Autocamioane cu remorcă 2,0÷3,0
Tractoare agricole, destinate unor lucrări
grele
2,0÷2,5
Tractoare pentru operaţiuni de transport 1,5÷2,0
În timpul exploatării automobilului, coeficientul de siguranţă 𝛽 se micşorează datorită uzurii
garniturilor de frecare. Pentru a evita patinarea ambreiajului𝛽 ≥ 1
𝛽 = 1.3
𝑀𝑐 = 1.3 ∙ 184.2 = 239.4 N*m
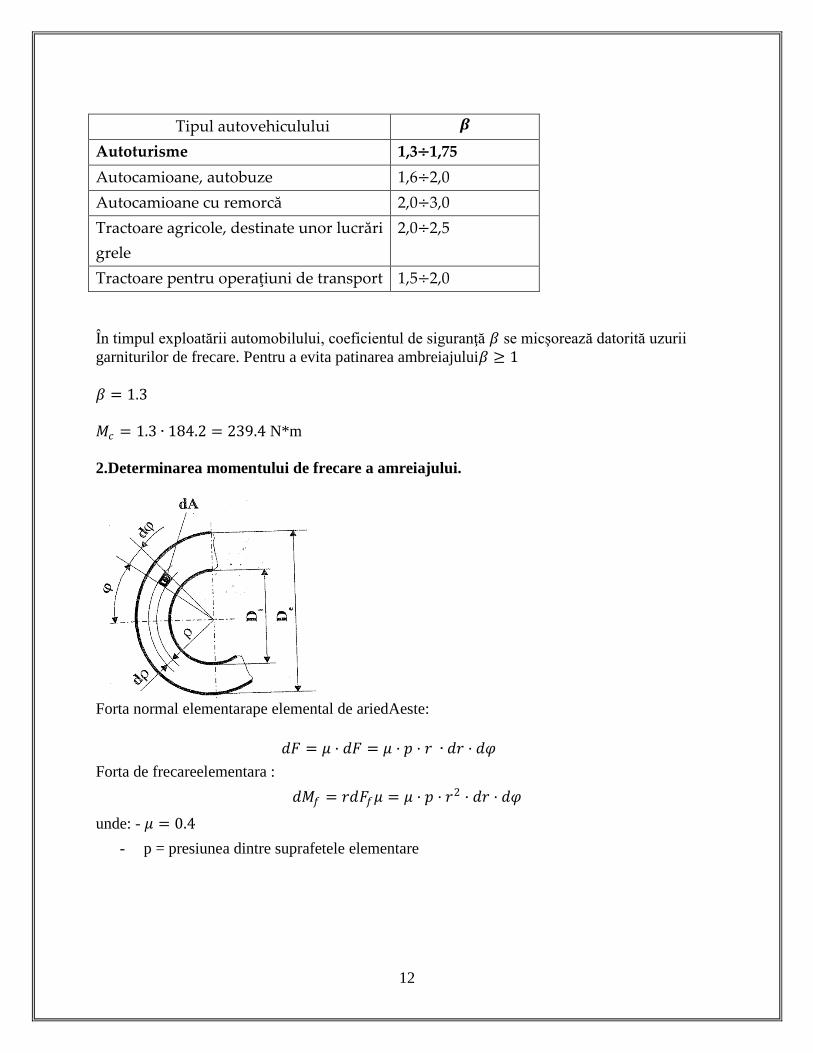
2.Determinarea momentului de frecare a amreiajului.
Forta normal elementarape elemental de ariedAeste:
𝑑𝐹 = 𝜇 · 𝑑𝐹 = 𝜇 · 𝑝 · 𝑟 ∙ 𝑑𝑟 · 𝑑𝜑
Forta de frecareelementara :
𝑑𝑀𝑓 = 𝑟𝑑𝐹𝑓𝜇 = 𝜇 · 𝑝 · 𝑟2 · 𝑑𝑟 · 𝑑𝜑
unde: - 𝜇 = 0.4
- p = presiunea dintre suprafetele elementare

13
Suprafeţele de fricţiune Tipul ambreiajului
Uscat În ulei
𝜇 𝑝[𝑀𝑃𝑎] 𝜇 𝑝[𝑀𝑃𝑎]
Oţel pe oţel sau fonta 0.15÷0.2 0.2÷0.4 0.05÷0.1 0.6÷0.1
Oţel pe azbobace lita 0.4÷0.45 0.1÷0.3 0.08÷0.15 0.2÷0.5
Oţel pe materiale
metaloceramice
0.4÷0.55 0.4÷0.6 0.09÷0.12 1.2÷2.0
𝑀𝑓 = 𝜇 · 𝑝 · · 𝑟2𝐷𝑒/2
𝐷𝑖/2
2𝜋
0
· 𝑑𝑟 · 𝑑𝜑 =2𝜋
3· 𝜇 · 𝑝 · [(
𝐷𝑒2
)2 − (𝐷𝑖2
)2]
Unde: -𝐷𝑒 este diametrul exterior al garniturii de fricţiune
-𝐷𝑖 este diametrul interior al garniturii de fricţiune
Presiunea:
𝑝 =𝐹
𝐴𝑓
unde: -𝐹 este forta de apasare asupra discului de ambreiaj, considerand uniform distributia, pe
suprafata de frecare 𝐴𝑓 .
Înlocuind:
𝑝 =𝐹
4
𝜋· 𝐷𝑒2 · 𝐷𝑖
2
𝑀𝑓 =1
3· 𝜇 · 𝐹 ·
𝐷𝑒3 − 𝐷𝑖
3
𝐷𝑒2 − 𝐷𝑖2 =
2
3· 𝜇 · 𝐹 ·
𝑅𝑒3 − 𝑅𝑖
3
𝑅𝑒2 − 𝑅𝑖2
Cum un disc de ambreiaj are 2 suprafeţe de frecare, relaţia de calculpentru un ambreiaj cu 𝑛𝑑
discuri devine:
𝑀𝑓 = 𝜇 · 𝐹 · 𝑖 ·2
3·𝑅𝑒
3 − 𝑅𝑖3
𝑅𝑒2 − 𝑅𝑖2
2
3·𝑅𝑒
3 − 𝑅𝑖3
𝑅𝑒2 − 𝑅𝑖2 = 𝜇 · 𝐹 · 𝑖 ∙ 𝑅𝑚

14
unde: -Rm- razamedie
-i= 2·nd=2
-nd= 1 – pentru ambreiaj monodisc
3.Determinarea dimensiunilor garniturilor de frecare.
Suprafata garniturilor de frecare se calculeaza cu relatia:
𝐴 = 𝜆 · 𝑀𝑚𝑎𝑥 [𝑐𝑚2]
Tipul autovehicolului Tipul ambreiajului 𝜆 [𝑐𝑚2/𝑑𝑎𝑁 ·𝑚]
Autoturism Monodisc 25÷30
Autocamion, autobuz Monodisc 35÷40
Bidisc 40÷45
unde: - 𝜆 este coeficientul care depinde de tipul automobilului si tipul ambreiajului
𝜆 = 25 ÷ 30
𝜆 = 25 [𝑐𝑚^2/𝑑𝑎𝑁 · 𝑚]
𝐴 = 25 · 18.42 · 10−5 = 460.5 [𝑐𝑚2]
𝑐 =𝑅𝑖𝑅𝑒⇒ 𝑐 = 0.53 ÷ 0.75 ⇒ 𝑐 = 0.6
𝑅𝑒 = 𝜆 ·𝑀𝑚𝑎𝑥
𝜋 · (1− 𝑐2) · 𝑖=
25 · 18.42
𝜋 · (1 − 0. 62) · 2= 10.7 𝑐𝑚
𝐷𝑒 = 𝑅𝑒 ∙ 2 = 10.7 ∙ 2 = 21.406 𝑐𝑚
15
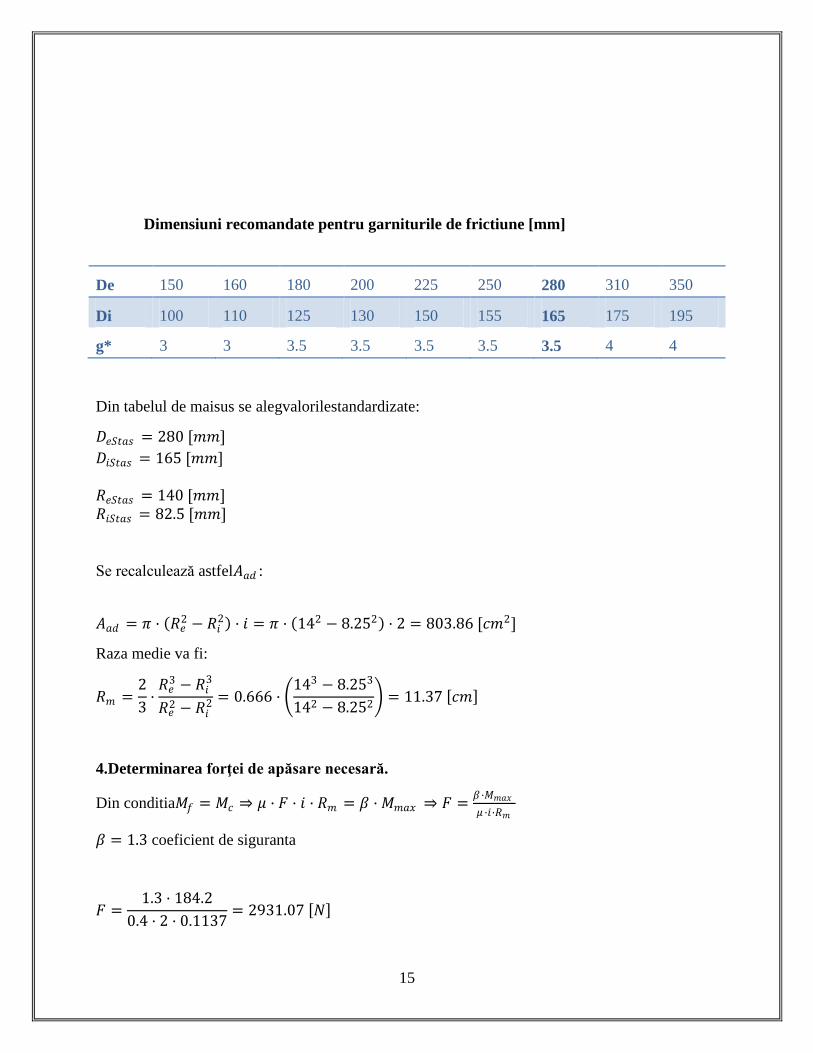
Dimensiuni recomandate pentru garniturile de frictiune [mm]
De 150 160 180 200 225 250 280 310 350
Di 100 110 125 130 150 155 165 175 195
g* 3 3 3.5 3.5 3.5 3.5 3.5 4 4
Din tabelul de maisus se alegvalorilestandardizate:
𝐷𝑒𝑆𝑡𝑎𝑠 = 280 [𝑚𝑚]
𝐷𝑖𝑆𝑡𝑎𝑠 = 165 [𝑚𝑚]
𝑅𝑒𝑆𝑡𝑎𝑠 = 140 [𝑚𝑚] 𝑅𝑖𝑆𝑡𝑎𝑠 = 82.5 [𝑚𝑚]
Se recalculează astfel𝐴𝑎𝑑 :
𝐴𝑎𝑑 = 𝜋 · 𝑅𝑒2 − 𝑅𝑖
2 · 𝑖 = 𝜋 · 142 − 8.252 · 2 = 803.86 [𝑐𝑚2]
Raza medie va fi:
𝑅𝑚 =2
3·𝑅𝑒
3 − 𝑅𝑖3
𝑅𝑒2 − 𝑅𝑖2 = 0.666 ·
143 − 8.253
142 − 8.252 = 11.37 𝑐𝑚
4.Determinarea forţei de apăsare necesară.
Din conditia𝑀𝑓 = 𝑀𝑐 ⇒ 𝜇 · 𝐹 · 𝑖 · 𝑅𝑚 = 𝛽 ·𝑀𝑚𝑎𝑥 ⇒ 𝐹 =𝛽 ·𝑀𝑚𝑎𝑥
𝜇 ·𝑖·𝑅𝑚
𝛽 = 1.3 coeficient de siguranta
𝐹 =1.3 · 184.2
0.4 · 2 · 0.1137= 2931.07 𝑁

16
5.Determinarea presiunii specifice dintre suprafeţele de frecare.
𝑝 =𝐹
𝐴′≤ 𝑝𝑎 = 0.15 ÷ 0.35 [𝑀𝑃𝑎]
unde: - 𝑝𝑎 presiunea admisa pentru garnituri de azbest
𝐴′ =𝜋
4· (𝐷𝑒
2 − 𝐷𝑖2)𝑆𝑇𝐴𝑆 =
3.14
4· 2802 − 1652 = 40192.75 [𝑚𝑚2]
𝑝 =2931.07
40192.75= 0.07 ≤ 𝑝𝑎
6.Verificarea la uzură.
Pentruapreciereauzurii se calculeazalucrul mechanic specific de frecare.
𝐿𝑠 =𝐿
2 · 𝑛𝑑 · 𝐴′ [𝑑𝑎𝑁 · 𝑚/𝑐𝑚2]
unde: - 𝐴′ = suprafata unei garniture de frecare
-𝑛𝑑 =numarul de discuri
- L = lucru mecanic de frecare la patinarea ambreiajului
L se calculeaza aproximativ prin doua metode:
a)
𝐿𝑎𝑝𝑟𝑜𝑥 =𝜋 · 𝑛 · 𝑟𝑟
2
30 · 𝑖𝑐𝑣𝐼2 · 𝑖0
2 · 𝐺𝑎𝑔
·2 · 𝜋 · 𝑛
7200+𝐺𝑎
2 · 𝜓
𝐾+
2
3· 𝐺𝑎 · 𝜓 ·
2
𝐾·𝐺𝑎𝑔
·𝜋 · 𝑛
30
unde: - 𝐾 = 50 [𝑑𝑎𝑁 ·𝑚/𝑠 coeficient care arata gradul de crestere a momentului de frecare in
timpul cuplarii
- Ga = 1721.68 daN - greutatea automobilului
- n = 1500 - turatia motorului la pornirea de pe loc
- 𝑓 = 0.02 ÷ 0.03 ⇒ 𝑓 = 0.02 - coeficient de rezistenta la rulare
- 𝑟𝑟 = 0.320 - raza de rulare
- 𝑖𝑐𝑣𝐼 = 2.67 - raport de transmitere in treapta I
- 𝑖0 = 4.1 - raportul transmisiei principale
17
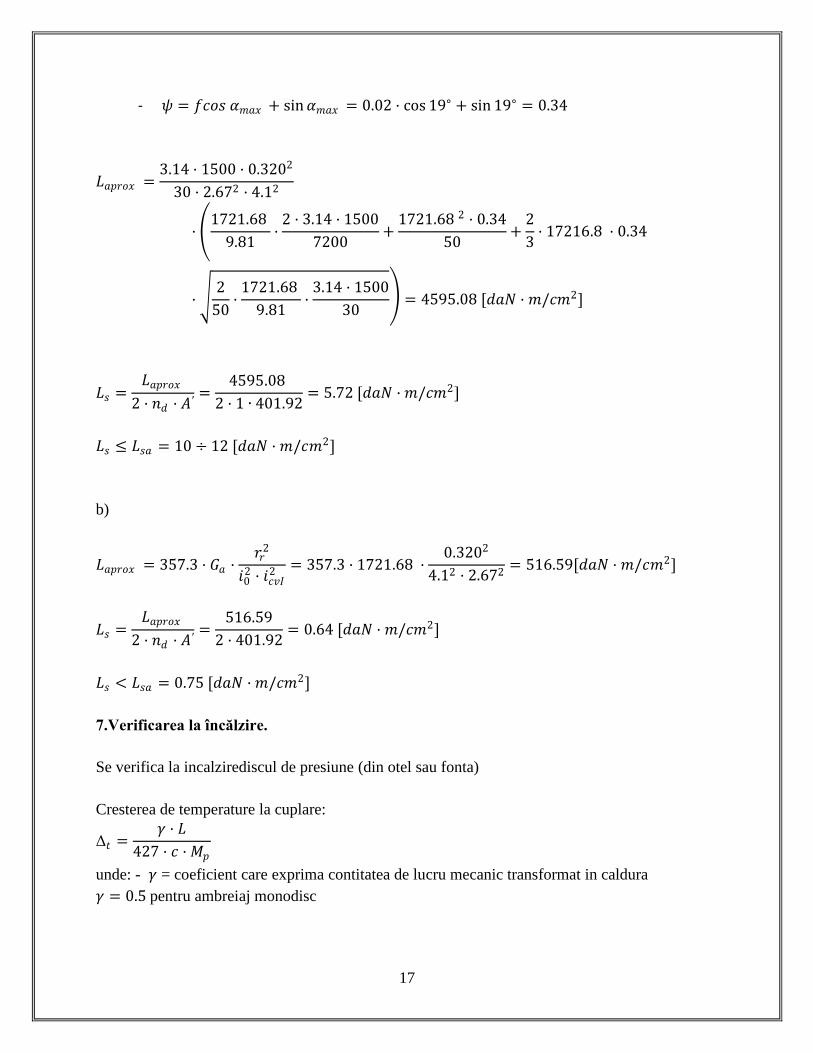
- 𝜓 = 𝑓𝑐𝑜𝑠 𝛼𝑚𝑎𝑥 + sin𝛼𝑚𝑎𝑥 = 0.02 · cos 19∘ + sin 19∘ = 0.34
𝐿𝑎𝑝𝑟𝑜𝑥 =3.14 · 1500 · 0.3202
30 · 2.672 · 4.12
· 1721.68
9.81·
2 · 3.14 · 1500
7200+
1721.68 2 · 0.34
50+
2
3· 17216.8 · 0.34
· 2
50·
1721.68
9.81·
3.14 · 1500
30 = 4595.08 [𝑑𝑎𝑁 · 𝑚/𝑐𝑚2]
𝐿𝑠 =𝐿𝑎𝑝𝑟𝑜𝑥
2 · 𝑛𝑑 · 𝐴′=
4595.08
2 · 1 ∙ 401.92= 5.72 [𝑑𝑎𝑁 ·𝑚/𝑐𝑚2]
𝐿𝑠 ≤ 𝐿𝑠𝑎 = 10 ÷ 12 [𝑑𝑎𝑁 ·𝑚/𝑐𝑚2]
b)
𝐿𝑎𝑝𝑟𝑜𝑥 = 357.3 · 𝐺𝑎 ·𝑟𝑟
2
𝑖02 · 𝑖𝑐𝑣𝐼
2 = 357.3 · 1721.68 ·0.3202
4.12 · 2.672= 516.59[𝑑𝑎𝑁 · 𝑚/𝑐𝑚2]
𝐿𝑠 =𝐿𝑎𝑝𝑟𝑜𝑥
2 · 𝑛𝑑 · 𝐴′=
516.59
2 · 401.92= 0.64 [𝑑𝑎𝑁 · 𝑚/𝑐𝑚2]
𝐿𝑠 < 𝐿𝑠𝑎 = 0.75 [𝑑𝑎𝑁 ·𝑚/𝑐𝑚2]
7.Verificarea la încălzire.
Se verifica la incalzirediscul de presiune (din otel sau fonta)
Cresterea de temperature la cuplare:
Δ𝑡 =𝛾 · 𝐿
427 · 𝑐 ·𝑀𝑝
unde: - 𝛾 = coeficient care exprima contitatea de lucru mecanic transformat in caldura
𝛾 = 0.5 pentru ambreiaj monodisc

18
𝑀𝑝 = 𝜌 · 𝜋 · 𝑅𝑒𝑝2 − 𝑅𝑖𝑝
2 · 𝑔𝑝
unde: - 𝑀𝑝= masa discului de presiunde [Kg]
- 𝜌𝑓𝑜𝑛𝑡𝑎 = 7.25 [𝐾𝑔/𝑐𝑚3]
- 𝑔𝑝 = 10 ÷ 18 ⇒ 𝑔𝑝 = 0.18 𝑐𝑚 grosimea discului de presiune
- 𝑐 = 𝑐𝑓𝑜𝑛𝑡𝑎 ≅ 0.115 [𝐾𝑐𝑎𝑙/𝐾𝑔 ∘𝐶] caldura specifica a piesei verificate
𝑅𝑒𝑝 = 𝑅𝑒 + 3 ÷ 5 𝑚𝑚 = 140 + 3 = 143 [𝑚𝑚]
𝑅𝑖𝑝 = 𝑅𝑖 − 2 ÷ 4 𝑚𝑚 = 83 − 3 = 80 [𝑚𝑚]
𝑀𝑝 = 𝜌 · 𝜋 · 𝑅𝑒𝑝2 − 𝑅𝑖𝑝
2 · 𝑔𝑝 = 7.25 · 3.14 · 1.432 − 0.802 · 0.18 = 5.79[𝐾𝑔]
a)
Δ𝑡 =𝛾 · 𝐿
427 · 𝑐 ·𝑀𝑝=
0.5 · 4595.08
427 · 0.115 · 5.79= 8.08 ∘𝐶
Δ𝑡 < 8 ÷ 15 [∘𝑐]
b)
Δ𝑡 =𝛾 · 𝐿
427 · 𝑐 ·𝑀𝑝=
0.5 · 516.59
427 · 0.115 · 5.79= 0.91 ∘𝐶
Δ𝑡 < 1 [∘𝐶]
Etapa nr. 3 Calculul arcului diafragmă
Scopul lucrarii consta in trasarea curbei de variatie (caracteristicii elastice) a fortei in functie de sageata
arcului.
Indiferent de tipul arcului folosit pentru a crea forta de apasare normala (pe garniturile de frictiune),
acesta trebuie sa fie comprimat (de rulment) peste valoarea la care forta de apasare devine nula (pentru a
crea astfel un joc intre suprafetele de frecare. Jocul este necesar pentru a ne asigura ca decuplarea
ambreiajului se face complet.
Sageata suplimentara Δ𝑓 se calculeaza cu relatia:
Δ𝑓 = 2 · 𝑛𝑑 · 𝑗𝑑
unde: - 𝑛𝑑 = numarul de discuri

19
h H
Fe
f2
- 𝑗𝑑 =jocul necesar intre garniturile de frecare si suprafata discului de presiune.
𝑗𝑑 = 0.75 ÷ 1.5 (valorile mari sunt pentru discul de ambreiaj cu 𝐷𝑒 > 180 𝑚𝑚 )
𝑛𝑑 = 1
𝑗𝑑 = 1
Δ𝑓 = 2 · 𝑛𝑑 · 𝑗𝑑 = 2 [𝑚𝑚]
Uzura admisibila a unei garnituri este:
Δ𝑈1 = 1.5 ÷ 2 𝑚𝑚 (pentru arc diafragma se considera Δ𝑈1 = 1 ÷ 1.5[mm]
Δ𝑈1 = 1
Δ𝑈1 𝑎𝑑𝑚 = 2 · 𝑛𝑑 · Δ𝑈1 = 2 · 1 · 1 = 2 [𝑚𝑚]
Se adopta jocul dintre capatul interior al arcului diafragma si rulmentul de presiune
𝛿 = 1.5 ÷ 2.5 𝑚𝑚 ⇒ 𝛿 = 1.5 [𝑚𝑚]
1.Trasarea caracteristicii.
Functie de raportul 𝐻 caracteristica arcului difera ca aliura. In cazul ambreiajelor de automobil se
adopta un raport 2 < 𝐻 < 2 care conduce la o forma a arcului ca in figura urmatoare.
Dupa cum se observa, arcul diafragma contine portiuni cu rigiditate negative pentru care crestere
a sagetii duce la micsorarea fortei de apasare (regim instabil).
Punctul de lucru al arcului diafragma se alege din A pentru ca variatii mici ale fortei de apasare.
Pentru marirea elasticitatii, arcurile diafragma au practicate taieturi radiale pe o anumita lungime.
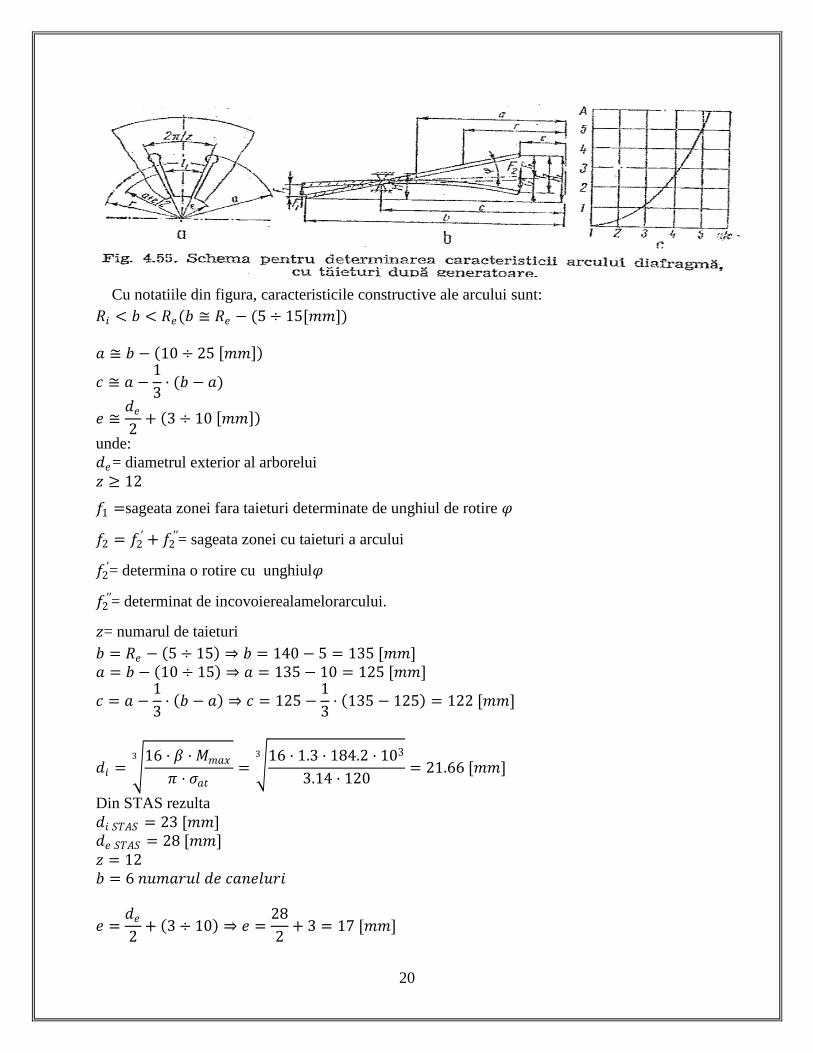
20
Cu notatiile din figura, caracteristicile constructive ale arcului sunt:
𝑅𝑖 < 𝑏 < 𝑅𝑒(𝑏 ≅ 𝑅𝑒 − (5 ÷ 15[𝑚𝑚])
𝑎 ≅ 𝑏 − 10 ÷ 25 𝑚𝑚
𝑐 ≅ 𝑎 −1
3· (𝑏 − 𝑎)
𝑒 ≅𝑑𝑒2
+ 3 ÷ 10 𝑚𝑚
unde:
𝑑𝑒= diametrul exterior al arborelui
𝑧 ≥ 12
𝑓1 =sageata zonei fara taieturi determinate de unghiul de rotire 𝜑
𝑓2 = 𝑓2′ + 𝑓2
′′= sageata zonei cu taieturi a arcului
𝑓2′= determina o rotire cu unghiul𝜑
𝑓2′′= determinat de incovoierealamelorarcului.
𝑧= numarul de taieturi
𝑏 = 𝑅𝑒 − 5 ÷ 15 ⇒ 𝑏 = 140 − 5 = 135 [𝑚𝑚] 𝑎 = 𝑏 − 10 ÷ 15 ⇒ 𝑎 = 135 − 10 = 125 [𝑚𝑚]
𝑐 = 𝑎 −1
3· 𝑏 − 𝑎 ⇒ 𝑐 = 125 −
1
3· 135 − 125 = 122 [𝑚𝑚]
𝑑𝑖 = 16 · 𝛽 · 𝑀𝑚𝑎𝑥
𝜋 · 𝜍𝑎𝑡
3
= 16 · 1.3 · 184.2 · 103
3.14 · 120
3
= 21.66 [𝑚𝑚]
Din STAS rezulta
𝑑𝑖 𝑆𝑇𝐴𝑆 = 23 [𝑚𝑚] 𝑑𝑒 𝑆𝑇𝐴𝑆 = 28 [𝑚𝑚] 𝑧 = 12 𝑏 = 6 𝑛𝑢𝑚𝑎𝑟𝑢𝑙 𝑑𝑒 𝑐𝑎𝑛𝑒𝑙𝑢𝑟𝑖
𝑒 =𝑑𝑒2
+ 3 ÷ 10 ⇒ 𝑒 =28
2+ 3 = 17 [𝑚𝑚]

21
Pentru ca arcul sa se gaseasca in echilibru, momentul fortelor exterioare trebuie sa fie egal cu
momentul fortelor interioare din partea continua a arcului.
Daca se tine seama ca 𝑓1 este realizat prin rotirea cu unghiul 𝜑 ⇒ forta cu care arcul apasa
discul de presiune
𝐹 = 𝐹1 − 𝐹2 ·𝑐 − 𝑒
𝑏 − 𝑐=
𝜋 · 𝐸′ ·
6 · 𝑏 − 𝑐 2· 𝑓1 · 𝑙𝑛 ·
𝑏
𝑎· 𝐻 − 𝑓1 ·
𝑏 − 𝑎
𝑏 − 𝑐 · 𝐻 −
𝑓1
2·𝑏 − 𝑎
𝑏 − 𝑐 +2
unde:
𝐻 = inaltimea partii continue a arcului [mm[
𝐻𝑡= inaltimea totala a arcului
Din asemanarea triunghiurilor rezulta
𝐻 = 𝐻𝑡 ·𝑏 − 𝑎
𝑏 − 𝑒
Se adopta:
𝐻 = 2.5 ÷ 4 𝑚𝑎𝑥𝑖𝑚 5 [𝑚𝑚] ş𝑖 𝑑𝑖𝑛 𝐻
⇒
𝐻 = 3.9
𝐻𝑡 = 𝐻 ·𝑏 − 𝑒
𝑏 − 𝑎= 3.25 ∙
135 − 17
135 − 125= 46.02 [𝑚𝑚]
= 2.25 [𝑚𝑚] Tot din asemanare de triunghiuri se obtine relatia de lagatura
𝑓2′ = 𝑓1 ·
𝑐 − 𝑒
𝑏 − 𝑐,
iar 𝑓2′′ se calculeaza din relatiiledeformatiei elastic
𝑓2′′ = 𝐹2∙
6 · 𝑒2
𝜋 ∙ 𝐸 ∙ 𝜂 ∙ 3·
1
2 𝑎2
𝑒2− 1 − 2 ∙
𝑎
𝑒− 1 + ln
𝑎
𝑒−1 = 𝐹2𝐴 ∙
6 · 𝑒2
𝜋 ∙ 𝐸 ∙ 𝜂 ∙ 3
unde:
𝐴 = 𝑓 ∙ (𝑎 𝑒)
Coeficientul 𝜂 =𝑙1∙𝑧
𝜋∙(𝑎+𝑒)
unde:
𝑙1∙ =latimea unei lamele
z= numarul de taieturi
Tinand seama de faptul ca latimea unei taieturi este de 2 4 [mm], se calculeaza 𝑙1∙
𝑙1∙ =2 ∙ 𝜋
𝑧 ∙(𝑎−𝑒)
2
=2 ∙ 3.14
12 ∙(125 − 17)
2
= 37.16 [𝑚𝑚]

22
𝜂 =𝑙1∙𝑧
𝜋 ∙ (𝑎 + 𝑒)=
37.16 ∙ 12
3.14 ∙ (125 + 17)= 1
Relatia fortei 𝐹1∙cu care apasa arcul asupra garniturilor de frictiune in absentafortei𝐹2∙
𝐹 =𝜋 · 𝐸′ · 4
6 · 𝑏 − 𝑐 2·𝑓1
· 𝑙𝑛 ·
𝑏
𝑎·
𝐻
−𝑓1
·𝑏 − 𝑎
𝑏 − 𝑐 ·
𝐻
−
𝑓1
2 · ·𝑏 − 𝑎
𝑏 − 𝑐 + 1
Dacă notăm mărimile adimensionale 𝐹1 ş𝑖 𝑓1
astfel:
𝐹1 = 𝐹1 ·
6 · (𝑏 − 𝑐)2
𝜋 · 𝐸′ · 4 𝑠𝑖 𝑓1
=𝑓1
⇒
𝐹1 = 𝑓1
· 𝑙𝑛 ·𝑏
𝑎·
𝐻
− 𝑓1 ·
𝑏 − 𝑎
𝑏 − 𝑐 ·
𝐻
− 𝑓1 ·
𝑏 − 𝑎
2 · (𝑏 − 𝑐) + 1
Caracteristica externă va arăta ca în figura:
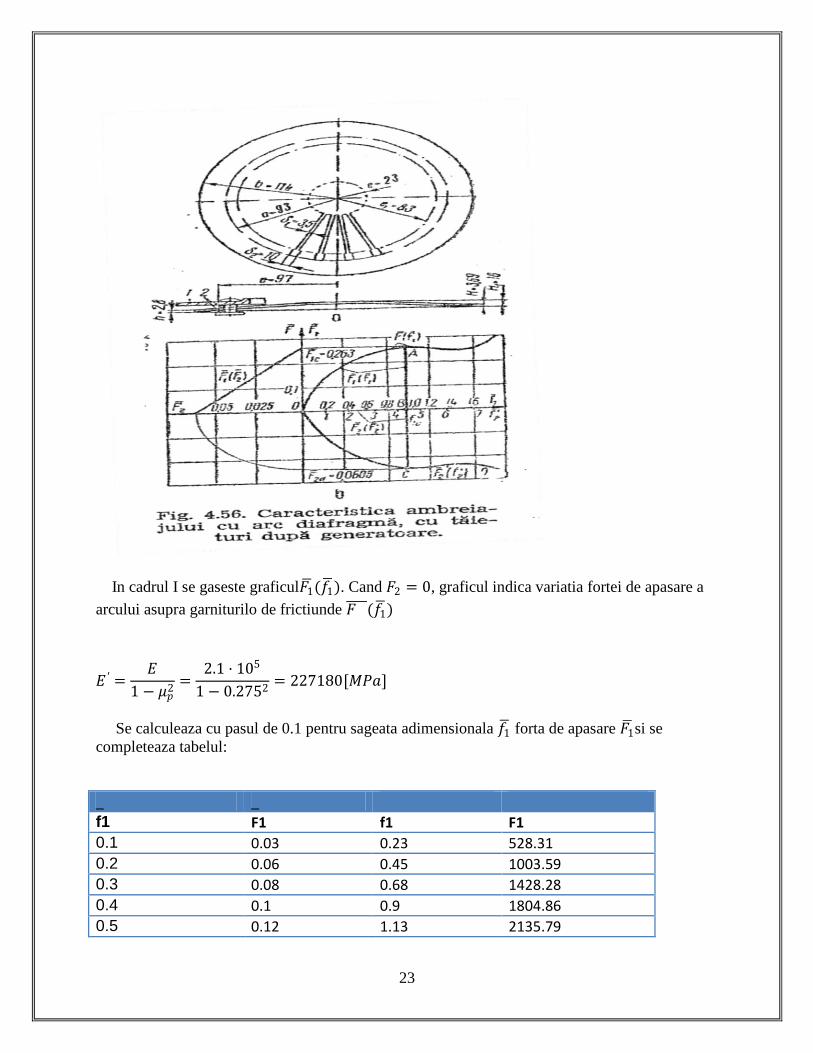
23
In cadrul I se gaseste graficul𝐹1 (𝑓1 ). Cand 𝐹2 = 0, graficul indica variatia fortei de apasare a
arcului asupra garniturilo de frictiunde 𝐹 (𝑓1 )
𝐸′ =𝐸
1 − 𝜇𝑝2=
2.1 · 105
1 − 0.2752= 227180[𝑀𝑃𝑎]
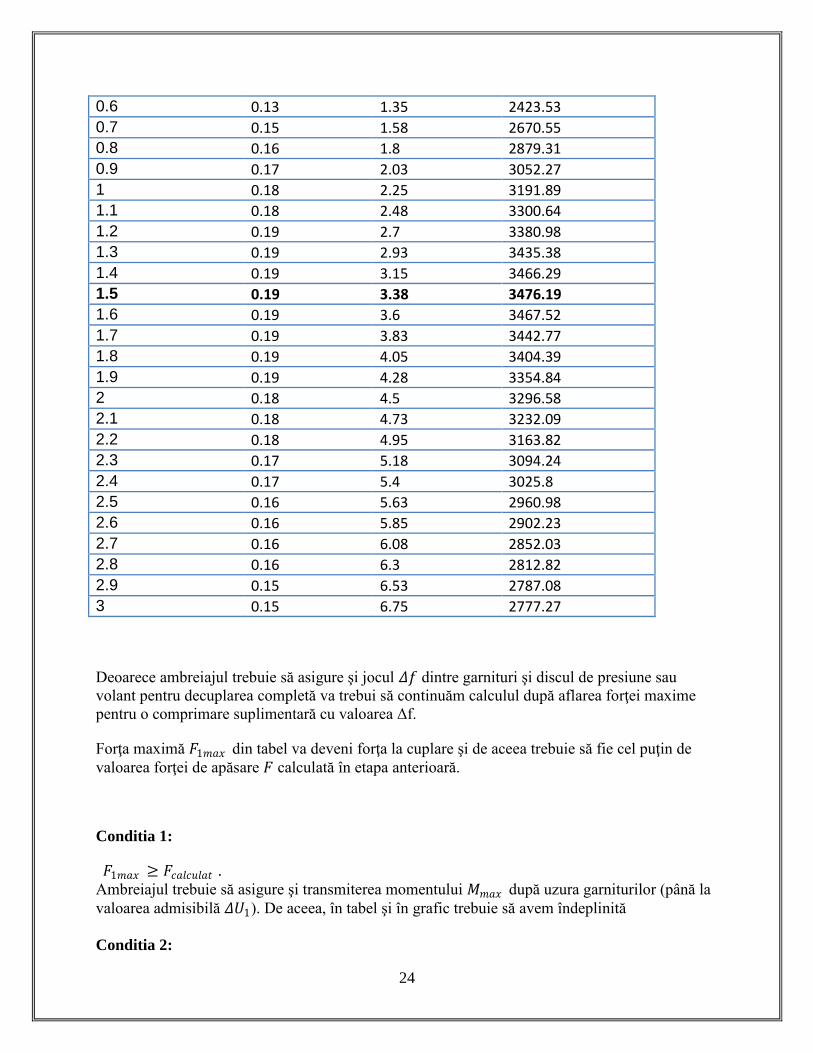
Se calculeaza cu pasul de 0.1 pentru sageata adimensionala 𝑓1 forta de apasare 𝐹1
si se
completeaza tabelul:
_ _
f1 F1 f1 F1
0.1 0.03 0.23 528.31
0.2 0.06 0.45 1003.59
0.3 0.08 0.68 1428.28
0.4 0.1 0.9 1804.86
0.5 0.12 1.13 2135.79
24
0.6 0.13 1.35 2423.53
0.7 0.15 1.58 2670.55
0.8 0.16 1.8 2879.31
0.9 0.17 2.03 3052.27
1 0.18 2.25 3191.89
1.1 0.18 2.48 3300.64
1.2 0.19 2.7 3380.98
1.3 0.19 2.93 3435.38
1.4 0.19 3.15 3466.29
1.5 0.19 3.38 3476.19
1.6 0.19 3.6 3467.52
1.7 0.19 3.83 3442.77
1.8 0.19 4.05 3404.39
1.9 0.19 4.28 3354.84
2 0.18 4.5 3296.58
2.1 0.18 4.73 3232.09
2.2 0.18 4.95 3163.82
2.3 0.17 5.18 3094.24
2.4 0.17 5.4 3025.8
2.5 0.16 5.63 2960.98
2.6 0.16 5.85 2902.23
2.7 0.16 6.08 2852.03
2.8 0.16 6.3 2812.82
2.9 0.15 6.53 2787.08
3 0.15 6.75 2777.27
Deoarece ambreiajul trebuie să asigure şi jocul 𝛥𝑓 dintre garnituri şi discul de presiune sau
volant pentru decuplarea completă va trebui să continuăm calculul după aflarea forţei maxime
pentru o comprimare suplimentară cu valoarea Δf.
Forţa maximă 𝐹1𝑚𝑎𝑥 din tabel va deveni forţa la cuplare şi de aceea trebuie să fie cel puţin de
valoarea forţei de apăsare 𝐹 calculată în etapa anterioară.
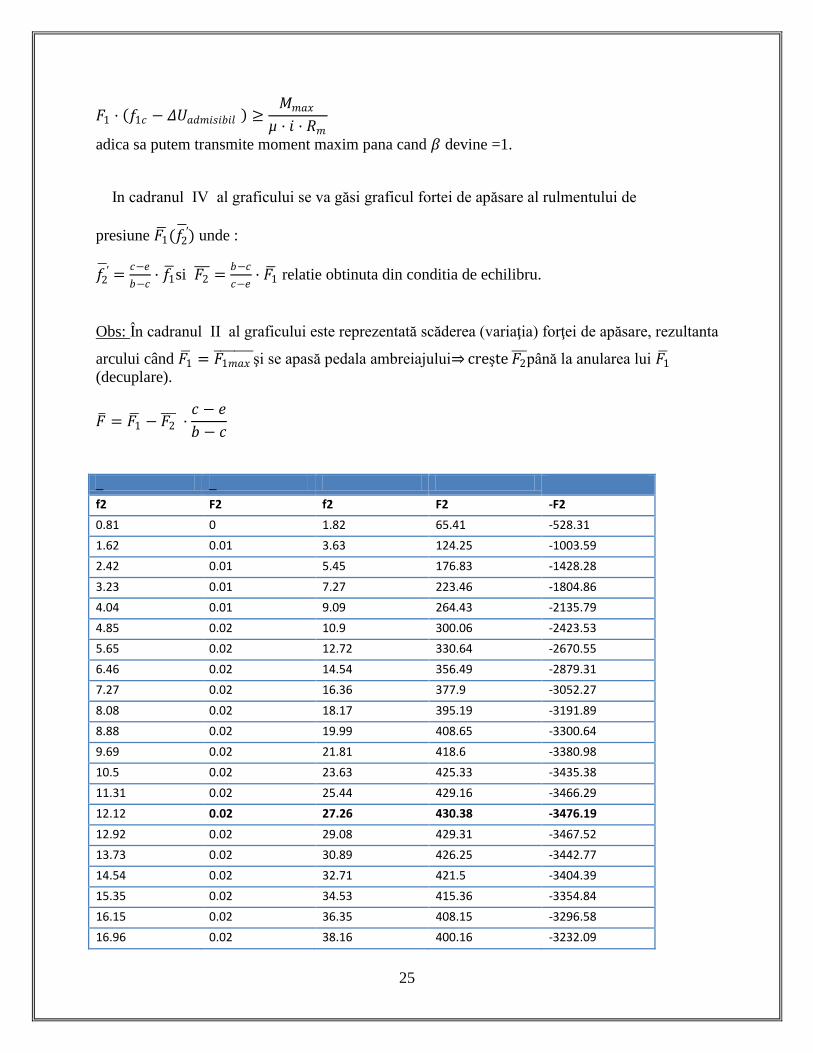
Conditia 1:
𝐹1𝑚𝑎𝑥 ≥ 𝐹𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑡 .
Ambreiajul trebuie să asigure şi transmiterea momentului 𝑀𝑚𝑎𝑥 după uzura garniturilor (până la
valoarea admisibilă 𝛥𝑈1). De aceea, în tabel şi în grafic trebuie să avem îndeplinită
Conditia 2:
25
𝐹1 · 𝑓1𝑐 − 𝛥𝑈𝑎𝑑𝑚𝑖𝑠𝑖𝑏𝑖𝑙 ≥𝑀𝑚𝑎𝑥
µ · 𝑖 · 𝑅𝑚
adica sa putem transmite moment maxim pana cand 𝛽 devine =1.
In cadranul IV al graficului se va găsi graficul fortei de apăsare al rulmentului de
presiune 𝐹1 (𝑓2
′ ) unde :
𝑓2′ =
𝑐−𝑒
𝑏−𝑐· 𝑓1 si 𝐹2
=𝑏−𝑐
𝑐−𝑒· 𝐹1 relatie obtinuta din conditia de echilibru.
Obs: În cadranul II al graficului este reprezentată scăderea (variaţia) forţei de apăsare, rezultanta
arcului când 𝐹1 = 𝐹1𝑚𝑎𝑥
şi se apasă pedala ambreiajului⇒ creşte 𝐹2 până la anularea lui 𝐹1
(decuplare).
𝐹 = 𝐹1 − 𝐹2
·𝑐 − 𝑒
𝑏 − 𝑐
_ _
f2 F2 f2 F2 -F2
0.81 0 1.82 65.41 -528.31
1.62 0.01 3.63 124.25 -1003.59
2.42 0.01 5.45 176.83 -1428.28
3.23 0.01 7.27 223.46 -1804.86
4.04 0.01 9.09 264.43 -2135.79
4.85 0.02 10.9 300.06 -2423.53
5.65 0.02 12.72 330.64 -2670.55
6.46 0.02 14.54 356.49 -2879.31
7.27 0.02 16.36 377.9 -3052.27
8.08 0.02 18.17 395.19 -3191.89
8.88 0.02 19.99 408.65 -3300.64
9.69 0.02 21.81 418.6 -3380.98
10.5 0.02 23.63 425.33 -3435.38
11.31 0.02 25.44 429.16 -3466.29
12.12 0.02 27.26 430.38 -3476.19
12.92 0.02 29.08 429.31 -3467.52
13.73 0.02 30.89 426.25 -3442.77
14.54 0.02 32.71 421.5 -3404.39
15.35 0.02 34.53 415.36 -3354.84
16.15 0.02 36.35 408.15 -3296.58
16.96 0.02 38.16 400.16 -3232.09
26
17.77 0.02 39.98 391.71 -3163.82
18.58 0.02 41.8 383.1 -3094.24
19.38 0.02 43.62 374.62 -3025.8
20.19 0.02 45.43 366.6 -2960.98
21 0.02 47.25 359.32 -2902.23
21.81 0.02 49.07 353.11 -2852.03
22.62 0.02 50.88 348.25 -2812.82
23.42 0.02 52.7 345.07 -2787.08
24.23 0.02 54.52 343.85 -2777.27
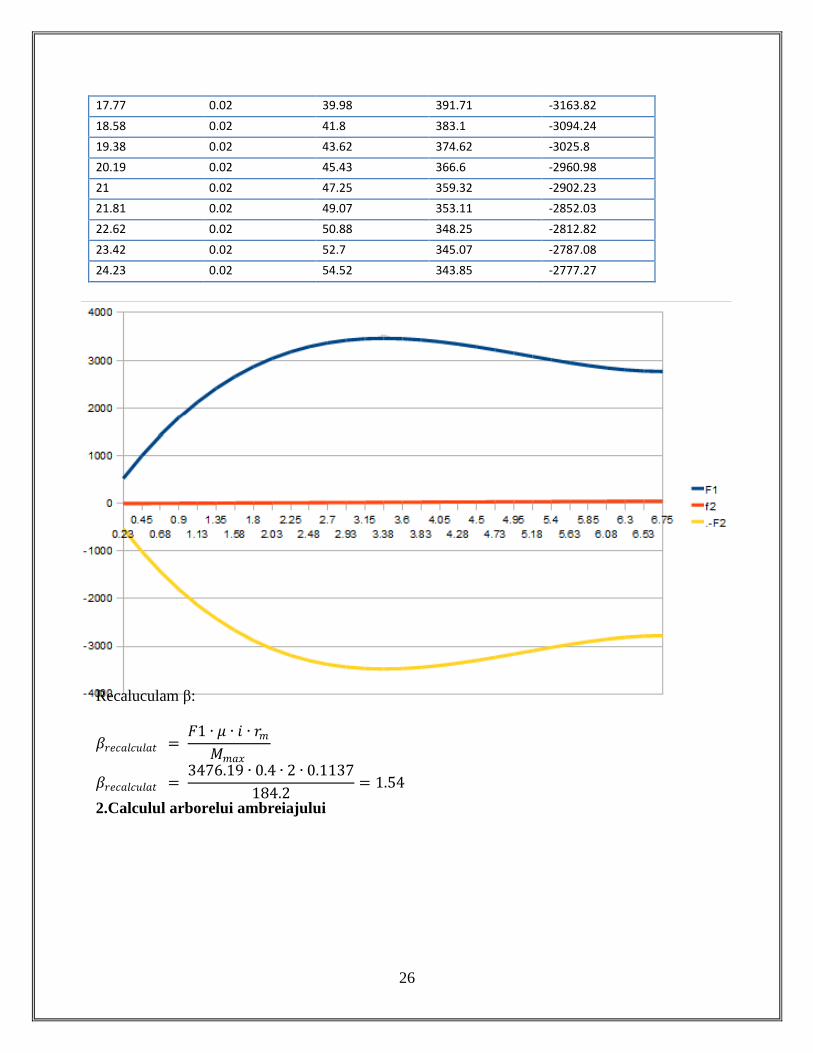
Recaluculam β:
𝛽𝑟𝑒𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑡 = 𝐹1 ∙ 𝜇 ∙ 𝑖 ∙ 𝑟𝑚
𝑀𝑚𝑎𝑥
𝛽𝑟𝑒𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑡 = 3476.19 ∙ 0.4 ∙ 2 ∙ 0.1137
184.2= 1.54
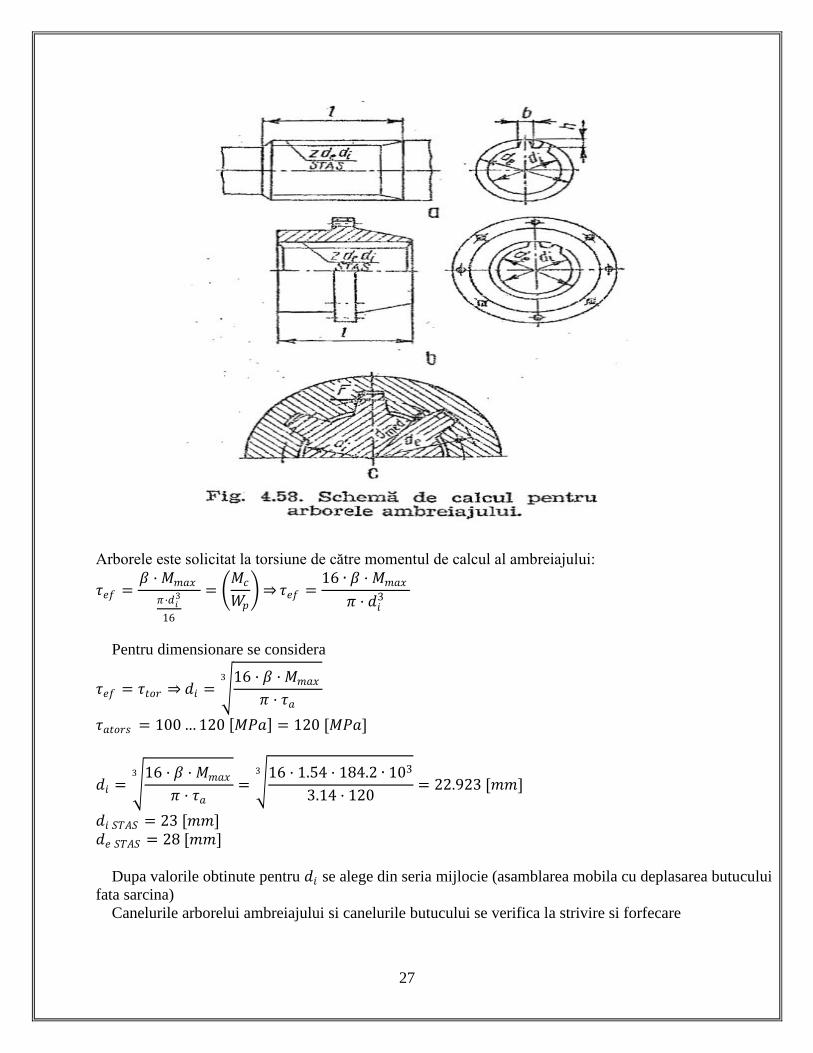
2.Calculul arborelui ambreiajului
27
Arborele este solicitat la torsiune de către momentul de calcul al ambreiajului:
𝜏𝑒𝑓 =𝛽 ·𝑀𝑚𝑎𝑥
𝜋 ·𝑑𝑖3
16
= 𝑀𝑐
𝑊𝑝 ⇒𝜏𝑒𝑓 =
16 ∙ 𝛽 · 𝑀𝑚𝑎𝑥
𝜋 · 𝑑𝑖3
Pentru dimensionare se considera
𝜏𝑒𝑓 = 𝜏𝑡𝑜𝑟 ⇒ 𝑑𝑖 = 16 · 𝛽 ·𝑀𝑚𝑎𝑥
𝜋 · 𝜏𝑎
3
𝜏𝑎𝑡𝑜𝑟𝑠 = 100… 120 𝑀𝑃𝑎 = 120 [𝑀𝑃𝑎]
𝑑𝑖 = 16 · 𝛽 · 𝑀𝑚𝑎𝑥
𝜋 · 𝜏𝑎
3
= 16 · 1.54 · 184.2 ∙ 103
3.14 · 120
3
= 22.923 [𝑚𝑚]
𝑑𝑖 𝑆𝑇𝐴𝑆 = 23 [𝑚𝑚] 𝑑𝑒 𝑆𝑇𝐴𝑆 = 28 [𝑚𝑚]
Dupa valorile obtinute pentru 𝑑𝑖 se alege din seria mijlocie (asamblarea mobila cu deplasarea butucului
fata sarcina)
Canelurile arborelui ambreiajului si canelurile butucului se verifica la strivire si forfecare

28
Fortele de solicitare:
𝐹 =𝑀𝑐
𝑟𝑚 unde 𝑟𝑚 =
𝑟𝑒+𝑟𝑖
2⇒ 𝑃𝑠 =
𝐹
𝑧·𝐿· cu h =
𝑑𝑒−𝑑𝑖
2
𝑃𝑠 =𝐹
𝑧 · 𝐴𝑠
𝑧 − 𝑛𝑢𝑚ă𝑟𝑢𝑙 𝑑𝑒 𝑐𝑎𝑛𝑒𝑙𝑢𝑟𝑖 𝐴𝑠 − 𝑎𝑟𝑖𝑎 𝑑𝑒 𝑠𝑡𝑟𝑖𝑣𝑖𝑟𝑒 (𝑠𝑢𝑝𝑟𝑎𝑓𝑎ţ𝑎 𝑐𝑎𝑛𝑒𝑙𝑢𝑟𝑖𝑖)
𝐴𝑠 = 𝐿 · ⇒ 𝐿 ·𝑑𝑒 − 𝑑𝑖
2
a)Verificarea la strivire
𝑃𝑠 =8 · 𝛽 · 𝑀𝑚𝑎𝑥
𝑧 · 𝐿 · (𝑑𝑒2 − 𝑑𝑖2)≤ 𝑝𝑎 = 20 ÷ 25 [𝑀𝑃𝑎]
unde:
𝑧 = 12 numarul de caneluri
𝐿 = 1.5 ÷ 2.5 · 𝑑𝑒 𝑚𝑚 𝐿 = 2 ∙ 28 = 56 𝑚𝑚
𝑃𝑠 =8 · 𝛽 · 𝑀𝑚𝑎𝑥
𝑧 · 𝐿 · 𝑑𝑒2 − 𝑑𝑖2
=8 · 1.54 · 184.2 ∙ 103
12 · 56 · 282 − 232 = 13 [MPa]
b)Verificarea la forfecare:
𝜏𝑓 =𝐹
𝑧 · 𝑏 ∙ 𝐿
𝜏𝑓 =4 · 𝛽 · 𝑀𝑚𝑎𝑥
𝑧 · 𝑏 ∙ 𝐿 · (𝑑𝑒 + 𝑑𝑖 )≤ 𝜏𝑎 = 20 ÷ 30 [𝑀𝑃𝑎]
𝜏𝑓 =4 · 1.54 · 184.2 ∙ 103
12 · 5 ∙ 56 · 28 + 23 = 7 [𝑀𝑃𝑎]
Se alege din STAS 791-87 un material pentru arbore: Oţel de cementare (CIF)40Cr10
Cementarea este tratamentul termochimic cu carbon aplicat oţelurilor în general cu conţinut mic
de carbon, într-un mediu capabil să cedeze carbon activ.În vederea obţinerii unei piese cementate
cu un miez tenace, cu 0.08 ÷ 0.15%𝐶. Pentru piese mai mari în cazurile în care se cere o duritate
mai mare pentru miez, conţinutul de C se măreşte până la 0.24%.Călirea superficială cu încălzire
prin curenţi de înaltă frecvenţă se bazează pe proprietatea curenţilor de înaltă frecvenţă de a
circula la suprafaţa conductorilor, pe o adâncime cu atât mai mică cu cât frecvenţa este mai mare.
Inducerea acestor microcurenţi în suprafaţa piesei prin plasarea acesteia în câmpul
electromagnetic produs de un inductor prin care circulă un curent de înaltă frecvenţă, în condiţii
29
determinate de frecvenţă şi putere, conduce la obţinerea unui efect Joule corespunzător de
încălzire a stratului.
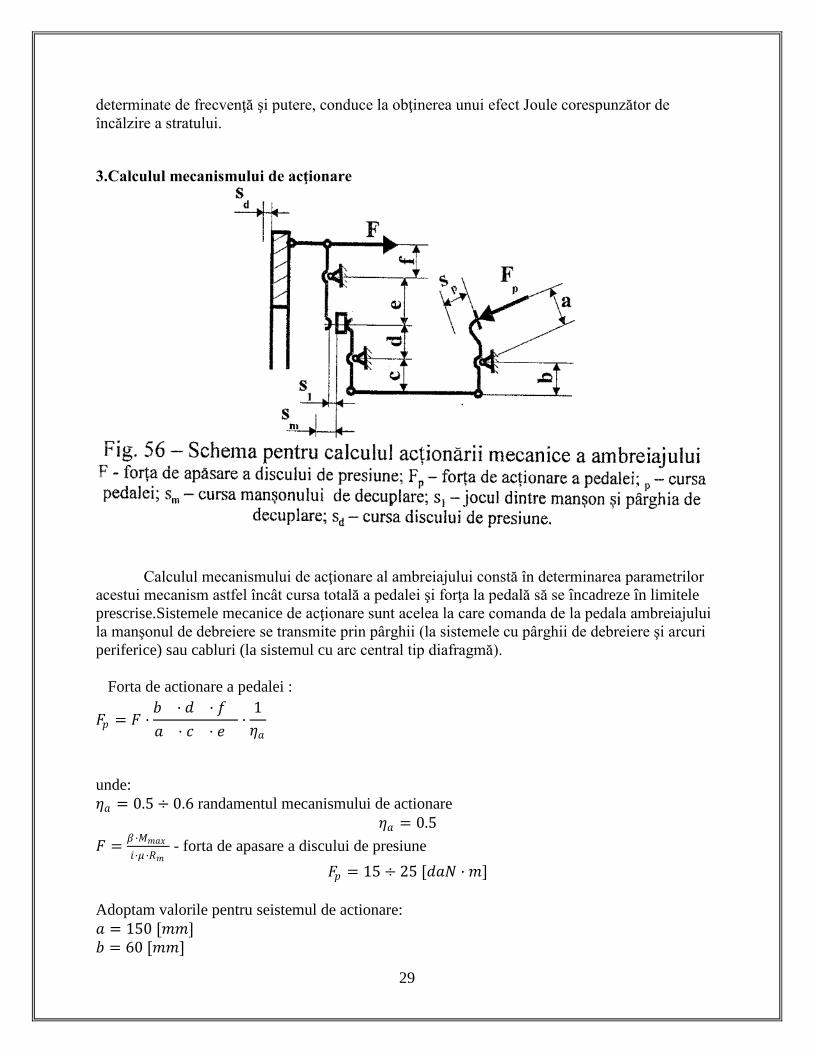
3.Calculul mecanismului de acţionare
Calculul mecanismului de acţionare al ambreiajului constă în determinarea parametrilor
acestui mecanism astfel încât cursa totală a pedalei şi forţa la pedală să se încadreze în limitele
prescrise.Sistemele mecanice de acţionare sunt acelea la care comanda de la pedala ambreiajului
la manşonul de debreiere se transmite prin pârghii (la sistemele cu pârghii de debreiere şi arcuri
periferice) sau cabluri (la sistemul cu arc central tip diafragmă).
Forta de actionare a pedalei :
𝐹𝑝 = 𝐹 ·𝑏 · 𝑑 · 𝑓
𝑎 · 𝑐 · 𝑒·
1
𝜂𝑎
unde:
𝜂𝑎 = 0.5 ÷ 0.6 randamentul mecanismului de actionare
𝜂𝑎 = 0.5
𝐹 =𝛽 ·𝑀𝑚𝑎𝑥
𝑖·𝜇 ·𝑅𝑚 - forta de apasare a discului de presiune
𝐹𝑝 = 15 ÷ 25 [𝑑𝑎𝑁 ·𝑚]
Adoptam valorile pentru seistemul de actionare:
𝑎 = 150 [𝑚𝑚] 𝑏 = 60 [𝑚𝑚]

30
𝑐 = 90 [𝑚𝑚] 𝑑 = 30 [𝑚𝑚] 𝑒 ∙ = 105 [𝑚𝑚] 𝑓 ∙ = 13 [𝑚𝑚]
𝐹𝑝 = (2931.07 ·60 · 30 · 13
150 · 90 · 105·
1
0.5)/10 = 9.68 [𝑑𝑎𝑁]
Cursa pedalei va fi:
𝑆𝑝 = 𝑠𝑙 +𝑒
𝑓· 𝑠𝑑 .
𝑐
𝑑·𝑎
𝑏
𝑠𝑑 = 0.75 ÷ 1.5 𝑚𝑚 = 1.5 [𝑚𝑚]-cursa discului de presiune
𝑠𝑙 = 1.4 ÷ 4 𝑚𝑚 = 4 [𝑚𝑚]-jocul dintre manson si parghie
Cursa 𝑆𝑝 a pedalei de ambreiaj nu trebuie să depăşească:
100 ÷ 150 𝑚𝑚 − 𝑎𝑢𝑡𝑜𝑡𝑢𝑟𝑖𝑠𝑚𝑒
150 ÷ 180 𝑚𝑚 − 𝑎𝑢𝑡𝑜𝑏𝑢𝑧𝑒,𝑎𝑢𝑡𝑜𝑐𝑎𝑚𝑖𝑜𝑎𝑛𝑒ş𝑖𝑡𝑟𝑎𝑐𝑡𝑜𝑎𝑟𝑒
𝑆𝑝 = 4 +105
13· 1.5 .
90
30·
150
60= 121 [𝑚𝑚]
Calculul de rezistenta a arcului tip diafragma
In cazul arcului diafragma cu taieturi dupa generatoare, solcitarea maxima apare in
sectiunea circulara ce trece prin punctual B. Considerand starea de eforturi unitare biaxiale,
Eforturile unitare normale vor fi.
a)Efortul de compresiune:
𝜍𝑐 =𝐸
2 ∙ (1− µ2)∙ 𝑎 − 𝑑 ∙ 𝛼2 − ∙ 𝛼
𝑎
unde: a,b,µ din etapa anterioara [mm]
𝑑 =𝑏 − 𝑎
𝑙𝑛𝑏
𝑎
𝛼 =𝐻
𝑏 − 𝑒 𝑢𝑛𝑔𝑖𝑢𝑙 𝑑𝑒 𝑖𝑛𝑐𝑙𝑖𝑛𝑎𝑟𝑒 𝑎𝑙 𝑎𝑟𝑐𝑢𝑙𝑢𝑖

31
𝑑 =135 − 125
𝑙𝑛135
125
= 130 [𝑚𝑚]
𝛼 =3.9
135 − 17= 0.03
𝜍𝑐 =227180
2 ∙ (1− 0.42)∙ 125 − 130 ∙ 0.032 − 2.25 ∙ 0.03
125= −86.36 [𝑀𝑃𝑎]
b)Efortul la incovoiere
𝜍𝑖 =3
𝜋∙𝐹2𝑑
2 ∙ 𝜂=
3
3.14∙
430.38
22 ∙ 1= 81 𝑀𝑃𝑎
Se calculeaza efortul unitary echivalent
𝜍𝑒𝑐 = 𝜍𝑐| + 𝜍𝑖 = 167 [𝑀𝑃𝑎]
Din STAS 796÷77 se alege un otel pentru arcuri
OLC 55A
𝑅𝑝0.2 = 880
𝑅𝑚 = 1080
c= 3
𝜍𝑎𝑑𝑚 = 880
3= 293.33
Etapa nr. 4 Calculul cutiilor de viteze mecanice, in trepte.
32
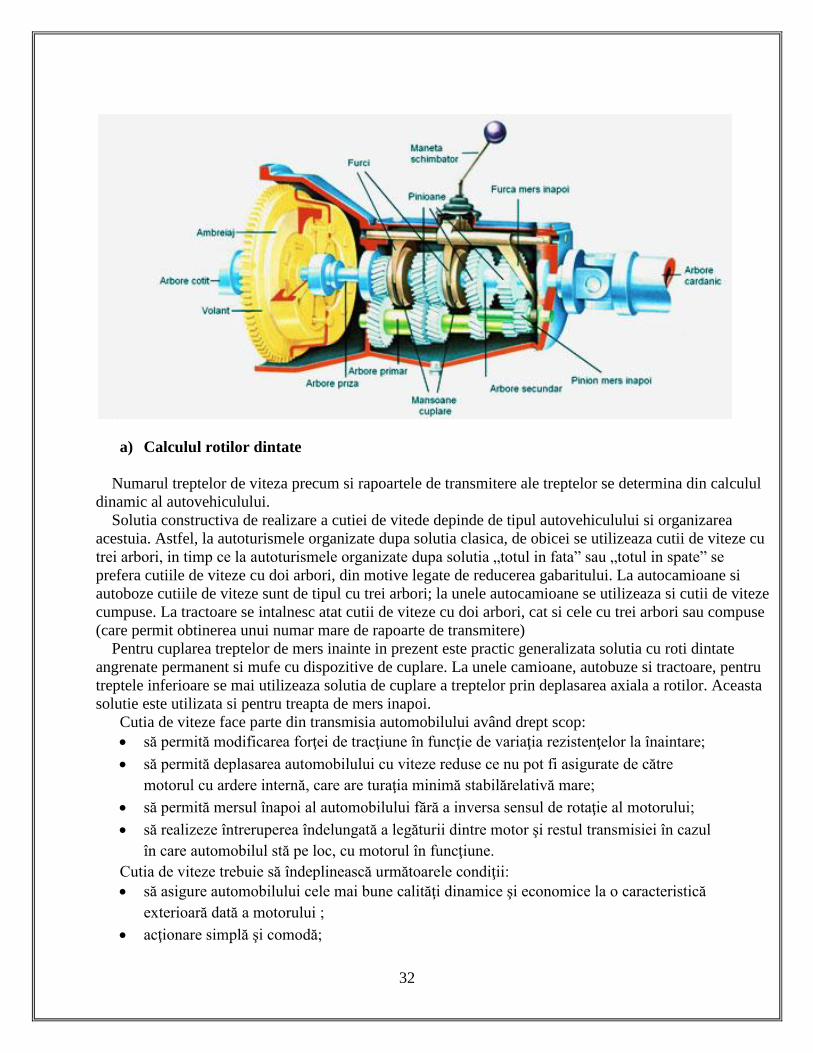
a) Calculul rotilor dintate
Numarul treptelor de viteza precum si rapoartele de transmitere ale treptelor se determina din calculul
dinamic al autovehiculului.
Solutia constructiva de realizare a cutiei de vitede depinde de tipul autovehiculului si organizarea
acestuia. Astfel, la autoturismele organizate dupa solutia clasica, de obicei se utilizeaza cutii de viteze cu
trei arbori, in timp ce la autoturismele organizate dupa solutia „totul in fata” sau „totul in spate” se
prefera cutiile de viteze cu doi arbori, din motive legate de reducerea gabaritului. La autocamioane si
autoboze cutiile de viteze sunt de tipul cu trei arbori; la unele autocamioane se utilizeaza si cutii de viteze
cumpuse. La tractoare se intalnesc atat cutii de viteze cu doi arbori, cat si cele cu trei arbori sau compuse
(care permit obtinerea unui numar mare de rapoarte de transmitere)
Pentru cuplarea treptelor de mers inainte in prezent este practic generalizata solutia cu roti dintate
angrenate permanent si mufe cu dispozitive de cuplare. La unele camioane, autobuze si tractoare, pentru
treptele inferioare se mai utilizeaza solutia de cuplare a treptelor prin deplasarea axiala a rotilor. Aceasta
solutie este utilizata si pentru treapta de mers inapoi.
Cutia de viteze face parte din transmisia automobilului având drept scop:
să permită modificarea forţei de tracţiune în funcţie de variaţia rezistenţelor la înaintare;
să permită deplasarea automobilului cu viteze reduse ce nu pot fi asigurate de către
motorul cu ardere internă, care are turaţia minimă stabilărelativă mare;
să permită mersul înapoi al automobilului fără a inversa sensul de rotaţie al motorului;
să realizeze întreruperea îndelungată a legăturii dintre motor şi restul transmisiei în cazul
în care automobilul stă pe loc, cu motorul în funcţiune.
Cutia de viteze trebuie să îndeplinească următoarele condiţii:
să asigure automobilului cele mai bune calităţi dinamice şi economice la o caracteristică
exterioară dată a motorului ;
acţionare simplă şi comodă;
33
funcţionare silenţioasă;
construcţie simplă;
randament ridicat;
siguranţă în funcţionare;
fiabilitate ridicată;
greutate şi gabarit reduse;
întreţinere uşoară.
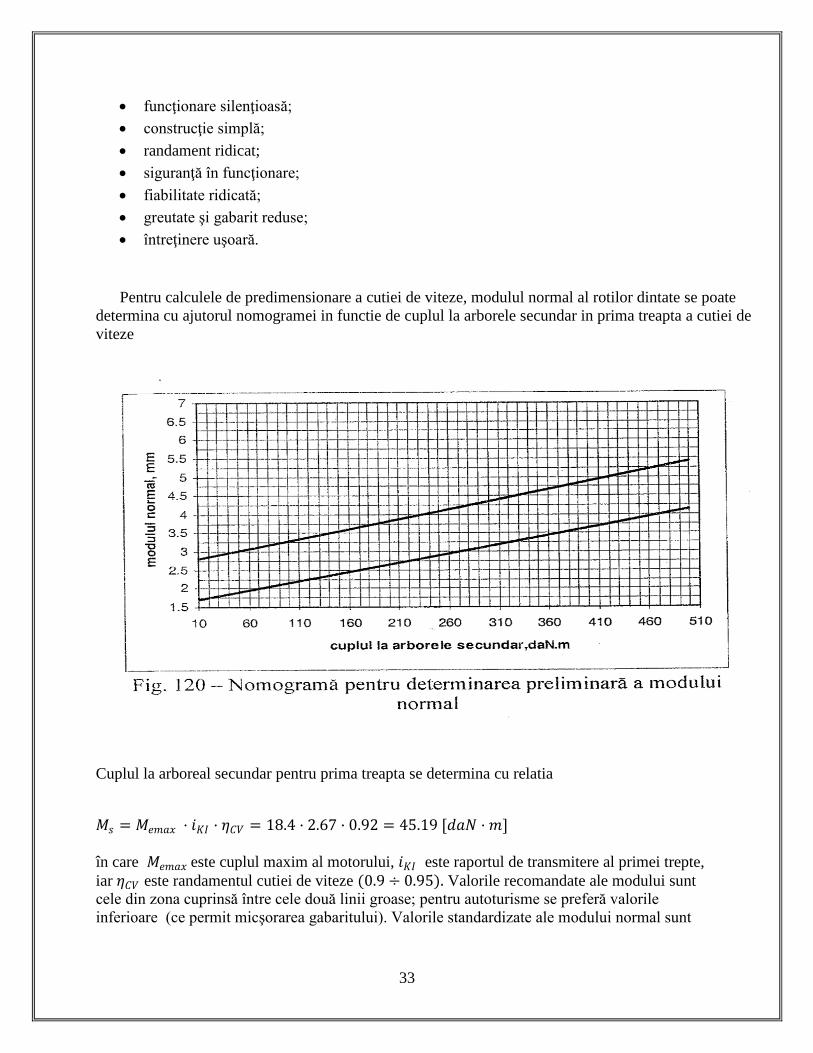
Pentru calculele de predimensionare a cutiei de viteze, modulul normal al rotilor dintate se poate
determina cu ajutorul nomogramei in functie de cuplul la arborele secundar in prima treapta a cutiei de
viteze
Cuplul la arboreal secundar pentru prima treapta se determina cu relatia
𝑀𝑠 = 𝑀𝑒𝑚𝑎𝑥 · 𝑖𝐾𝐼 · 𝜂𝐶𝑉 = 18.4 · 2.67 · 0.92 = 45.19 [𝑑𝑎𝑁 ·𝑚]
în care 𝑀𝑒𝑚𝑎𝑥 este cuplul maxim al motorului, 𝑖𝐾𝐼 este raportul de transmitere al primei trepte,
iar 𝜂𝐶𝑉 este randamentul cutiei de viteze (0.9 ÷ 0.95). Valorile recomandate ale modului sunt
cele din zona cuprinsă între cele două linii groase; pentru autoturisme se preferă valorile
inferioare (ce permit micşorarea gabaritului). Valorile standardizate ale modului normal sunt
34
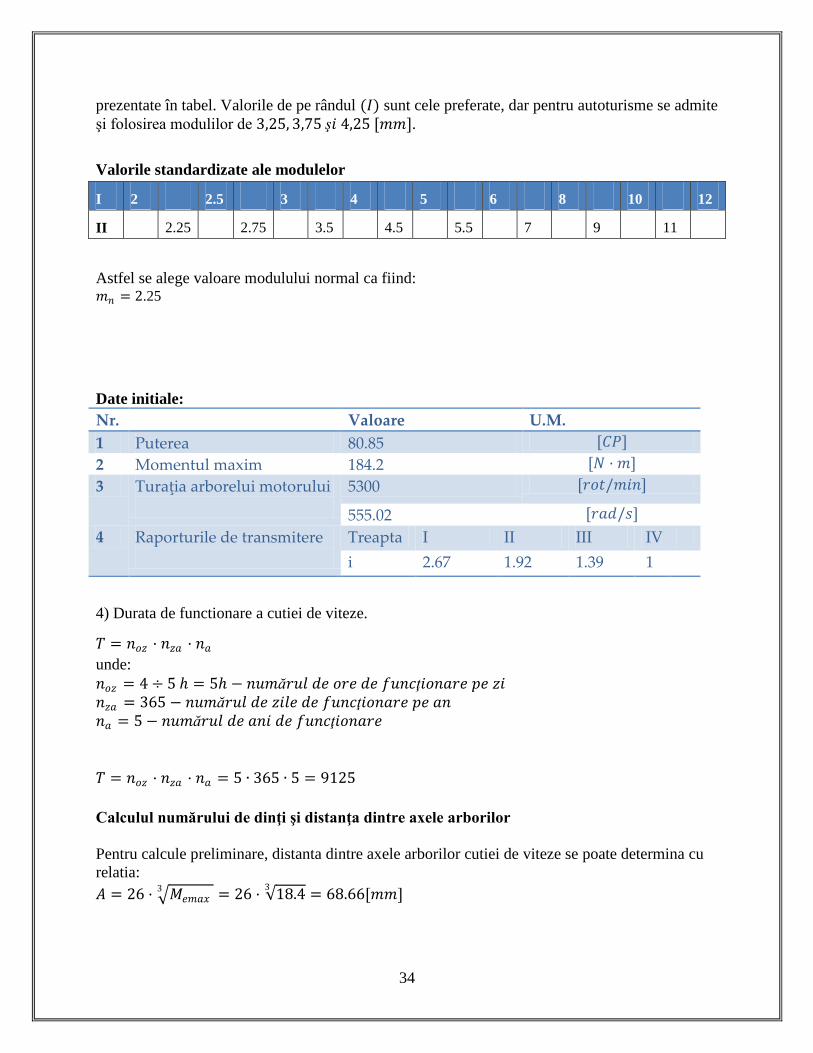
prezentate în tabel. Valorile de pe rândul (𝐼) sunt cele preferate, dar pentru autoturisme se admite
şi folosirea modulilor de 3,25, 3,75 ş𝑖 4,25 [𝑚𝑚].
Valorile standardizate ale modulelor
I 2 2.5 3 4 5 6 8 10 12
II 2.25 2.75 3.5 4.5 5.5 7 9 11
Astfel se alege valoare modulului normal ca fiind: 𝑚𝑛 = 2.25
Date initiale:
Nr. Valoare U.M.
1 Puterea 80.85 [𝐶𝑃]
2 Momentul maxim 184.2 [𝑁 · 𝑚]
3 Turaţia arborelui motorului
5300 [𝑟𝑜𝑡/𝑚𝑖𝑛]
555.02 [𝑟𝑎𝑑/𝑠]
4 Raporturile de transmitere
Treapta I II III IV
i 2.67 1.92 1.39 1
4) Durata de functionare a cutiei de viteze.
𝑇 = 𝑛𝑜𝑧 · 𝑛𝑧𝑎 · 𝑛𝑎
unde: 𝑛𝑜𝑧 = 4 ÷ 5 = 5 − 𝑛𝑢𝑚ă𝑟𝑢𝑙 𝑑𝑒 𝑜𝑟𝑒 𝑑𝑒 𝑓𝑢𝑛𝑐ţ𝑖𝑜𝑛𝑎𝑟𝑒 𝑝𝑒 𝑧𝑖 𝑛𝑧𝑎 = 365 − 𝑛𝑢𝑚ă𝑟𝑢𝑙 𝑑𝑒 𝑧𝑖𝑙𝑒 𝑑𝑒 𝑓𝑢𝑛𝑐ţ𝑖𝑜𝑛𝑎𝑟𝑒 𝑝𝑒 𝑎𝑛
𝑛𝑎 = 5− 𝑛𝑢𝑚ă𝑟𝑢𝑙 𝑑𝑒 𝑎𝑛𝑖 𝑑𝑒 𝑓𝑢𝑛𝑐ţ𝑖𝑜𝑛𝑎𝑟𝑒
𝑇 = 𝑛𝑜𝑧 · 𝑛𝑧𝑎 · 𝑛𝑎 = 5 ∙ 365 ∙ 5 = 9125
Calculul numărului de dinţi şi distanţa dintre axele arborilor
Pentru calcule preliminare, distanta dintre axele arborilor cutiei de viteze se poate determina cu
relatia:
𝐴 = 26 · 𝑀𝑒𝑚𝑎𝑥3 = 26 · 18.4
3= 68.66[𝑚𝑚]
35
Pentru reducerea dimensiunilor cutiei de viteze, pentru 𝑧1 se adoptă numărul minim de dinţi
(𝑧𝑚𝑖𝑛 = 13) şi rezultă 𝑧5 = 𝑧1 · 𝑖𝐾𝐼 , în acest caz distanţa dintre axe va fi:
Numerede de dinti se rotunjesc la valoriintregi, astfelincatrapoartele de transmitere care rezulta
sa se apropie cat mai mult de cele determinate prin calcul dinamic.
𝑧1 =2 · 𝐴 ∙ cos 25°
𝑚 · (1 + 𝑖𝐾𝐼)= 14.15 ≈ 15 𝑑𝑖𝑛𝑡𝑖
𝑧5 = 15 · 2.67 = 40.06 ≈ 41 𝑑𝑖𝑛ţ𝑖
𝑧2 =2 · 𝐴 · cos𝛽
𝑚 · (1 + 𝑖𝐾𝐼𝐼)=
2 · 68.82 · cos 25°
2.25 · (1 + 1.92)= 18.82 ≈ 19 𝑑𝑖𝑛ţ𝑖
𝑧6 = 𝑧3 · 𝑖𝐾𝐼𝐼 = 19 · 1.92 = 36.57 ≈ 37 𝑑𝑖𝑛ţ𝑖
𝑧3 =2 · 𝐴 · cos𝛽
𝑚 · (1 + 𝑖𝐾𝐼𝐼𝐼)=
2 · 68.82 · cos 25°
2.25 · (1 + 1.39)= 23 𝑑𝑖𝑛ţ𝑖
𝑧6 = 𝑧5 · 𝑖𝐾𝐼𝐼𝐼 = 23 · 1.39 = 31.91 ≈ 32 𝑑𝑖𝑛ţ𝑖
𝑧7 =2 · 𝐴 · cos𝛽
𝑚 · (1 + 𝑖𝐾𝐼𝑉)=
2 · 68.82 · cos 25°
2.25 · (1 + 1)= 27.53 ≈ 28 𝑑𝑖𝑛ţ𝑖
𝑧8 = 𝑧7 · 𝑖𝐾𝐼𝑉 = 28 · 1 = 28 𝑎𝑑𝑜𝑝𝑡𝑎𝑚: 27 𝑑𝑖𝑛ţ𝑖
Prin rotunjirea numarului de dinti ai rotilor la valori intregi, distanta dintre axe se
modifica; pastrarea aceleiasi distante interaxiale pentru toate treptele de viteza se realizeaza prin:
𝐴𝑐 =𝑚 · (𝑧1𝑟 + 𝑧5𝑟)
2 · cos𝛽=
2 ∙ (15 + 41)
2 ∙ cos 25𝑜= 70 [𝑚𝑚]
Se determinaapoiunghiul de angrenare frontal, folosindu-se relatia:
𝑐𝑜𝑠𝛼𝑤𝑓 = 𝑐𝑜𝑠𝛼𝑓 ∙𝐴𝑐𝐴
unde:
𝛼𝑓 = 𝑎𝑟𝑐𝑡𝑔𝑡𝑔𝛼
𝑐𝑜𝑠𝛽1𝑖𝑎𝑟 𝑢𝑛𝑔𝑖𝑢𝑙 𝑑𝑒 𝑎𝑛𝑔𝑟𝑒𝑛𝑎𝑟𝑒 𝑛𝑜𝑟𝑚𝑎𝑙 𝛼 = 20𝑜 .
𝑐𝑜𝑠𝛼𝑓 = 𝑎𝑟𝑐𝑡𝑔𝑡𝑔 20°
𝑐𝑜𝑠 25°= 𝑎𝑟𝑐𝑡𝑔 0.40⇒ 𝛼𝑓 = 21.880
36
𝑐𝑜𝑠 𝛼𝑤𝑓 = 𝑐𝑜𝑠 21.88° ∙70
68.82= 0.948
𝛼𝑤𝑓 = 20.77°
Suma deplasarilor de profil ale celor doua roti dintate, necesare pentru a readuce angrenajul la
distant dintre axe A este data de relatia:
𝑥1 + 𝑥5 = (𝑧1 + 𝑧5) ∙𝑖𝑛𝑣𝛼𝑤𝑓 − 𝑖𝑛𝑣𝛼𝑓
2 ∙ 𝑡𝑔𝛼𝑓
In care 𝑖𝑛𝑣𝛼 = 𝑡𝑔𝛼 – α (unghiul de angrenare normal α se exprima in radiani)
𝑖𝑛𝑣𝛼𝑤𝑓 = 0.058
𝑖𝑛𝑣𝛼𝑓 = 0.053
Treapta 1:
𝑥1 + 𝑥5 = 15 + 41 ∙0.058 − 0.053
2 ∙ 𝑡𝑔 21.88= −0.35
Treapta a 2 a:
𝑥2 + 𝑥6 = 19 + 37 ∙0.058 − 0.053
2 ∙ 𝑡𝑔 21.88= −0.35
Treapta a 3 a:
𝑥3 + 𝑥7 = 23 + 32 ∙0.058 − 0.053
2 ∙ 𝑡𝑔 21.88= −0.22
Treapta a 4 a:
𝑥4 + 𝑥8 = 28 + 27 ∙0.058 − 0.053
2 ∙ 𝑡𝑔 21.88= −0.22
37
A.Alegerea Schemei de organizare a cutiei de viteze
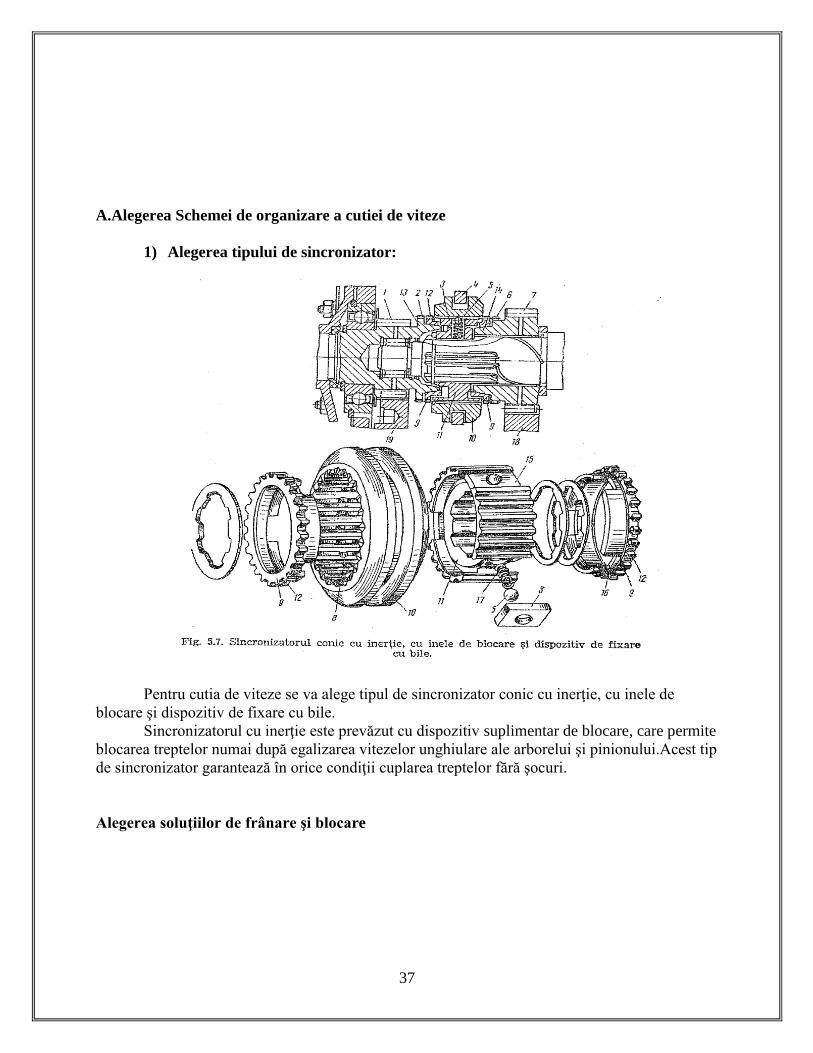
1) Alegerea tipului de sincronizator:
Pentru cutia de viteze se va alege tipul de sincronizator conic cu inerţie, cu inele de
blocare şi dispozitiv de fixare cu bile.
Sincronizatorul cu inerţie este prevăzut cu dispozitiv suplimentar de blocare, care permite
blocarea treptelor numai după egalizarea vitezelor unghiulare ale arborelui şi pinionului.Acest tip
de sincronizator garantează în orice condiţii cuplarea treptelor fără şocuri.
Alegerea soluţiilor de frânare şi blocare

38
Funcţionarea sincronizatorului la cuplarea prizei directe este următoarea:
Coroana şi manşonul solidarizate prin bilele 5, împreună cu pastilele 3, se deplasează
spre stânga cu ajutorul furcii 4. Pastilele sprijinindu-se cu capetele în ferestrele inelului de
blocare 12, apasă acest inel pe suprafaţa conică 13. Datorită frecării care ia naştere între
suprafeţele conice în contact, inelul de blocare se roteşte în raport cu manşonul în sensul rotirii
roţii dinţate 1, cât îi permite jocul dintre pastilele 3 şi ferestrele 16 ale inelului.În urma rotaţiei
inelului de blocare, cu un sfert de pas, dinţii inelului vin parţial în dreptul dinţilor coroanei 10
împiedicând deplasarea coroanei spre pinionul 1 până când vitezele unghiulare ale pinionului 1 şi
a arborelui secundar nu se egalează. Efortul axial transmis de conducator asupra coroanei şi
manşonului se transmite asupra inelului de blocare, care apăsând asupra suprafeţei conice 13, dă
naştere la o forţă de frecare ce conduce la egalarea vitezelor unghiulare.
După ce viteza de rotaţie a arborelui primar şi cea a inelului de blocare devin egale,
component tangenţial a forţei de apăsare dintre tesiturile dinţilor coroanei şi ai inelului, devine
suficientă pentru a roti inelul de blocare în sensul opus rotaţiei arborelui primar.La rotirea
inelului de blocare, chiar cu un unghi mic, dinţii coroanei intră în angrenare cu dinţii inelului de
blocare, iar interacţiunea dintre tesiturile dinţilor încetează şi cu această frecare dintre
suprafeţele conice ale inelului de blocare şi ale arborelui primar.În această situaţie coroana 10 se
poate deplasa în lungul manşonului după învingerea forţelor arcurilor 17, prin împingerea bilelor
în locaşul din placuţe, iar dantura ei va angrena cu dantura 2 a roţii 1, cuplând treapta fără şoc şi
fără zgomot.
2) Schema cinematica
Calculul efectiv al tronsoanelor se face dupa stabilirea latimii rotilor dintate
Se asigura daca distant dintre axe asigura limitarea tensiunii de contact la oboseala pe flancurile
dintilor.
pentru roti dintate cu dinti drepti sau inclinati𝑏/𝐷𝑑 ≤ 0.5
𝐴 ≥ 62 ∙ 𝑢 ∙ (𝑢 + 1) ∙ 𝑀𝑡 ∙ 𝐾1
𝑢 ∙ 𝛹𝑎 ∙ 𝜍𝐻 𝑙𝑖𝑚
0.33
39
pentru roti dintate cu dinti inclinatiti 𝑏/𝐷𝑑 ≥ 0.5
𝐴 ≥ 57 ∙ 𝑢 ∙ (𝑢 + 1) ∙ 𝑀𝑡 ∙ 𝐾1
𝑢 ∙ 𝛹𝑎 ∙ 𝜍𝐻 𝑙𝑖𝑚
0.33
unde: - 𝑏- latimea rotii dintate [mm]
- 𝐷𝑑 –diametrul de divizare al rotilor dintate conducatoare [mm]
- 𝑢 = 𝑧𝑚𝑎𝑟𝑒 /𝑧𝑚𝑖𝑐
- 𝑀𝑡- cuplu amplificat rotii dintate conducatoare [N*mm]
- 𝐾1 = 1.5… 2 (factor dinamic exterior)
- 𝛹𝑎 = 𝑏/𝐴
- 𝜍𝐻 𝑙𝑖𝑚 = 300… 900 [𝑀𝑃𝑎] (rezistentalimita de contact
𝑏 = 24 [mm]
𝐴 ≥ 57 ∙ 𝑢 ∙ 𝑢 + 1 ∙ 𝑀𝑡 ∙𝐾1
𝑢∙𝛹𝑎 ∙𝜍𝐻 𝑙𝑖𝑚
0.33
= 68.54 mm
𝑏 = 21 - pentru urmatoarele trepte se adopta b = 21 mm
𝐴 ≥ 62 ∙ 𝑢 ∙ 𝑢 + 1 ∙ 𝑀𝑡 ∙𝐾1
𝑢∙𝛹𝑎 ∙𝜍𝐻 𝑙𝑖𝑚
0.33
= 68.79 mm
𝑏 = 15.5 - adoptam b = 21 mm
𝐴 ≥ 62 ∙ 𝑢 ∙ 𝑢 + 1 ∙ 𝑀𝑡 ∙𝐾1
𝑢∙𝛹𝑎 ∙𝜍𝐻 𝑙𝑖𝑚
0.33
= 68.93 mm
𝑏 = 13.75 – adoptam b = 21 mm
𝐴 ≥ 62 ∙ 𝑢 ∙ 𝑢 + 1 ∙ 𝑀𝑡 ∙𝐾1
𝑢∙𝛹𝑎 ∙𝜍𝐻 𝑙𝑖𝑚
0.33
= 66.48 mm
𝑫𝒅𝟏 𝑫𝒅𝟐 𝑫𝒅𝟑 𝑫𝒅𝟒 𝑫𝒅𝟓 𝑫𝒅𝟔 𝑫𝒅𝟕 𝑫𝒅𝟖

40
37.5 47.5 57.5 70 102.5 92.5 80 67.5
Calculul efectiv al tronsoanelor:
𝐵 = 0.3 ÷ 1 ∙ 𝑑𝑝 = 0.9 ∙ 23 = 20.7 𝑚𝑚 − 𝑙ăţ𝑖𝑚𝑒𝑎 𝑙𝑎𝑔ă𝑟𝑒𝑙𝑜𝑟 𝑗𝑐 = 4 𝑚𝑚 − 𝑗𝑜𝑐𝑢𝑙 𝑑𝑖𝑛𝑡𝑟𝑒 𝑟𝑜ţ𝑖𝑙𝑒 𝑑𝑖𝑛ţ𝑎𝑡𝑒 ş𝑖 𝑐𝑎𝑟𝑐𝑎𝑠ă
𝑙𝑟𝑑1 = 1.4 ∙ 𝑏1 = 1.4 ∙ 24 = 34 𝑚𝑚 𝑙𝑟𝑑2 = 𝑙𝑟𝑑3 = 𝑙𝑟𝑑4 = 1.4 ∙ 𝑏2 = 1.4 ∙ 21 = 29[𝑚𝑚] 𝑗𝑠 = 3 𝑚𝑚 − 𝑗𝑜𝑐𝑢𝑙 𝑑𝑖𝑛𝑡𝑟𝑒 𝑟𝑜𝑎𝑡ă ş𝑖 𝑠𝑖𝑛𝑐𝑟𝑜𝑛𝑖𝑧𝑎𝑡𝑜𝑟
𝑗𝑚𝑟 = 5 𝑚𝑚 − 𝑗𝑜𝑐𝑢𝑙 𝑑𝑖𝑛𝑡𝑟𝑒 𝑝ă𝑟ţ𝑖𝑙𝑒 𝑒𝑔𝑎𝑙𝑒 𝑎𝑓𝑙𝑎𝑡𝑒 î𝑛 𝑚𝑖ş𝑐𝑎𝑟𝑒 𝑟𝑒𝑙𝑎𝑡𝑖𝑣ă
𝑙𝑠 = 1 ÷ 1.5 ∙ 𝑑𝑝 = 1.5 ∙ 23 = 34.5 𝑚𝑚 − 𝑙ăţ𝑖𝑚𝑒𝑎 𝑠𝑖𝑛𝑐𝑟𝑜𝑛𝑖𝑧𝑡𝑜𝑟𝑢𝑙𝑢𝑖
𝑙1 =𝐵
2+ 𝑗𝑐 +
𝑙𝑟𝑑1
2= 31 𝑚𝑚
𝑙2 =𝑙𝑟𝑑1
2+ 2𝑗𝑠 ∙ 𝑙𝑠 +
𝑙𝑟𝑑2
2= 72 𝑚𝑚
𝑙3 =𝑙𝑟𝑑2
2+ 𝑗𝑚𝑟 +
𝑙𝑟𝑑2
2= 34 𝑚𝑚
𝑙4 =𝑙𝑟𝑑2
2+ 𝑗𝑚𝑟 +
𝑙𝑟𝑑2
2= 34 𝑚𝑚
𝑙5 =𝑙𝑟𝑑2
2+ 𝑙𝑠 + 𝑗𝑚𝑟 +
𝑙𝑟𝑑2
2= 69 𝑚𝑚
𝑙6 =𝐵
2+ 𝑗𝑐 +
𝑙𝑟𝑑2
2= 39 𝑚𝑚
Calculul arborilor cutiei de viteze.
Utilizand schema din figura fortele ce actioneaza asupra unei roti dintate cilindrice cu
dantura inclinata sunt:
Forta tangentiala
𝐹𝑡 =𝑀𝑡
𝑟𝑑,
unde 𝑀𝑡este momentul de torsiune, iar 𝑟𝑑este raza de divizare a rotii dintate;
Forta axiala
𝐹𝑎 = 𝐹𝑡 ∙ 𝑡𝑔𝛽
Forta radial
𝐹𝑟 =𝐹𝑡 ∙ 𝑡𝑔𝛼
𝑐𝑜𝑠𝛽
Forta normal pe dinte
41
𝑁 =𝐹𝑡
𝑐𝑜𝑠𝛼 ∙ 𝑐𝑜𝑠𝛽
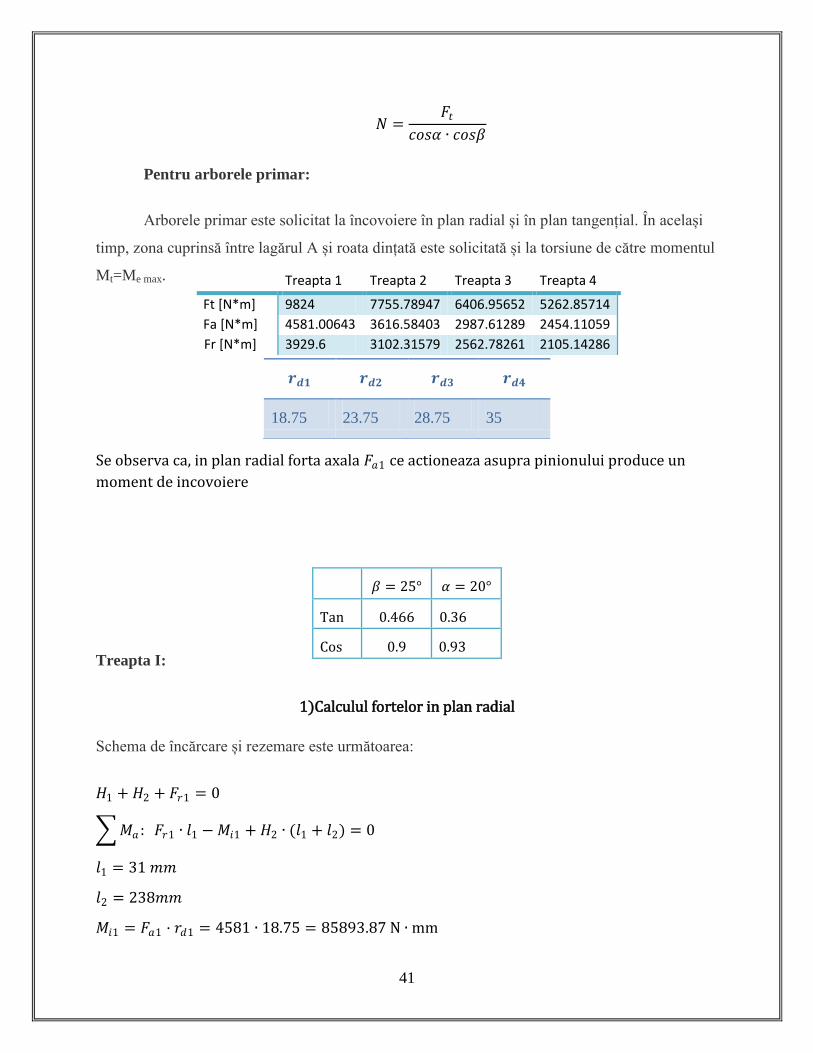
Pentru arborele primar:
Arborele primar este solicitat la încovoiere în plan radial și în plan tangențial. În același
timp, zona cuprinsă între lagărul A și roata dințată este solicitată și la torsiune de către momentul
Mt=Me max.
Se observa ca, in plan radial forta axala 𝐹𝑎1 ce actioneaza asupra pinionului produce un
moment de incovoiere
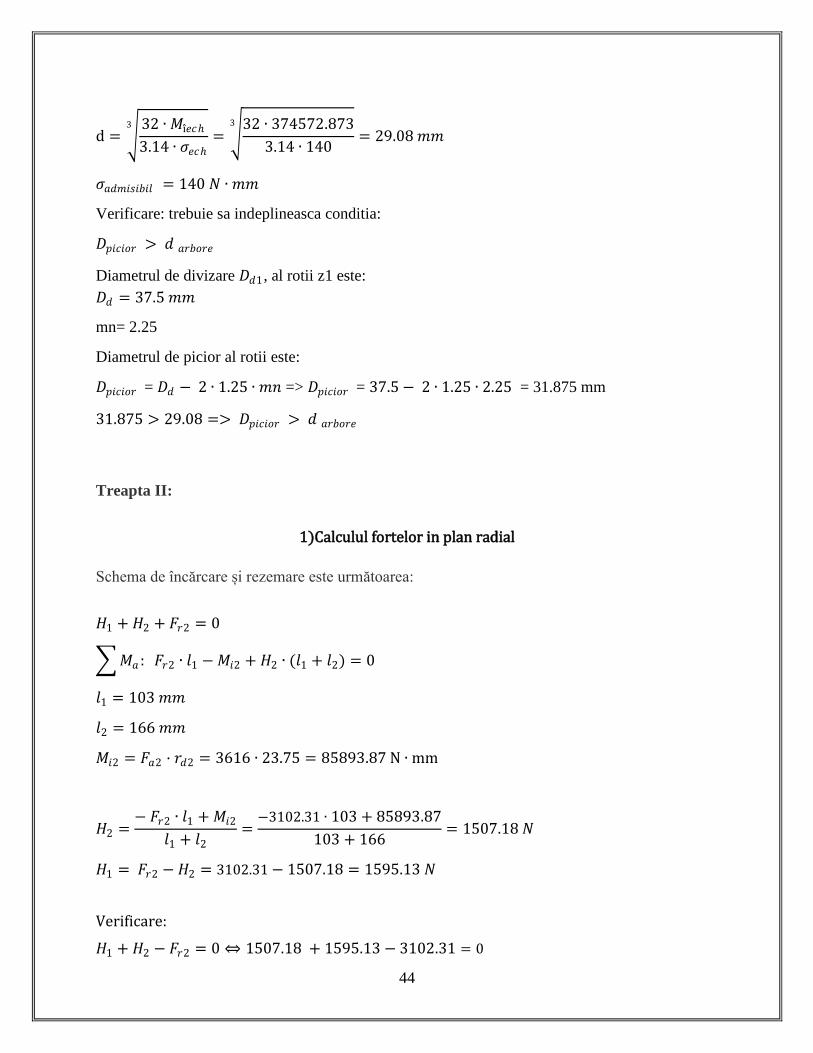
Treapta I:
1)Calculul fortelor in plan radial
Schema de încărcare și rezemare este următoarea:
𝐻1 + 𝐻2 + 𝐹𝑟1 = 0
𝑀𝑎 : 𝐹𝑟1 ∙ 𝑙1 −𝑀𝑖1 + 𝐻2 ∙ (𝑙1 + 𝑙2) = 0
𝑙1 = 31 𝑚𝑚
𝑙2 = 238𝑚𝑚
𝑀𝑖1 = 𝐹𝑎1 · 𝑟𝑑1 = 4581 ∙ 18.75 = 85893.87 N ∙mm
Treapta 1 Treapta 2 Treapta 3 Treapta 4
Ft [N*m] 9824 7755.78947 6406.95652 5262.85714
Fa [N*m] 4581.00643 3616.58403 2987.61289 2454.11059
Fr [N*m] 3929.6 3102.31579 2562.78261 2105.14286
𝒓𝒅𝟏 𝒓𝒅𝟐 𝒓𝒅𝟑 𝒓𝒅𝟒
18.75 23.75 28.75 35
𝛽 = 25° 𝛼 = 20°
Tan 0.466 0.36
Cos 0.9 0.93
42
𝐻2 =− 𝐹𝑟1 ∙ 𝑙1 +𝑀𝑖1
𝑙1 + 𝑙2=
3929.6 ∙ 31 + 85893.87
31 + 238= 772.16 𝑁
𝐻1 = 𝐹𝑟1 − 𝐻2 = 3929.6− 772.16 = 3157.43 𝑁
Verificare:
𝐻1 + 𝐻2 − 𝐹𝑟1 = 0 ⇔ 3157.43 + 772.16− 3929.6 = 0
𝑥1є 0, 𝑙1 ⇒𝑀𝑖𝐻 𝑥1 = 𝐻1 ∙ 𝑥1
𝑥1 = 0
𝑀(0) = 0
𝑥1 = 31
𝑀(31) = 𝐻1 ∙ 𝑙1 = 3157.43 ∙ 31 = 97880.59 𝑁 ∙ 𝑚𝑚
𝑥2є 0, 𝑙2 ⇒𝑀𝑖𝐻 𝑥2 = 𝐻2 ∙ 𝑥2
𝑥2 = 0
𝑀(0) = 0
𝑥2 = 238
𝑀(238) = 𝐻2 ∙ 𝑙2 = 772.16 ∙ 238 = 183774.46 𝑁 ∙ 𝑚𝑚
2)Calculul fortelor in plan tangential
𝑉1 + 𝑉2 − 𝐹𝑡1 = 0
𝑀1 =−𝑉2 · 𝑙1 + 𝑙2 + 𝐹𝑡1 · 𝑙1 = 0
𝑉2 =𝐹𝑡1 · 𝑙1𝑙1 + 𝑙2
=9824 · 31
31 + 238= 1132.13 𝑁
𝑉1 = 𝐹𝑡1 − 𝑉2 = 9824− 1132.13 = 8691.86 𝑁
Verificare
𝑉1 + 𝑉2 − 𝐹𝑡1 = 0 ⇔ 8691.86 + 1132.13 − 9824 = 0
43
yє 0, 𝑙1 ⇒𝑀𝑖𝑉 𝑦1 = −𝑉1 ∙ 𝑦1
y = 0
𝑀(0) = 0
𝑦 = 31
𝑀(31) = −𝑉1 ∙ 𝑙1 = −8691.86 ∙ 31 = −269447.85 𝑁 ∙ 𝑚𝑚
𝑦2є 0, 𝑙2 ⇒𝑀𝑖𝑉 𝑥2 = −𝑉2 ∙ 𝑦2
y = 0
𝑀(0) = 0
𝑦 = 238
𝑀(238) = −𝑉2 ∙ 𝑙2 = −1354.26 ∙ 238 = −269447.85 𝑁 ∙ 𝑚𝑚
𝑀î𝑟𝑒𝑧 0 = (𝑀𝑖𝐻)2 + (𝑀𝑖𝑉)2 = 0 𝑁 ∙ 𝑚𝑚
𝑀î𝑟𝑒𝑧 1 = 97880.592 + (−269447.85)2 = 286675.34 𝑁 ∙ 𝑚𝑚
𝑀î𝑟𝑒𝑧 2 = 0 ∙ 0 = 0 𝑁 ∙ 𝑚𝑚
𝑀î𝑟𝑒𝑧 3 = 183774.462 + (−2694475.347)2 = 326152.107 𝑁 ∙ 𝑚𝑚
𝑀î𝑒𝑐 = 𝑀î𝑟𝑒𝑧2 + 𝛼 ·𝑀𝑡
2 𝑁 ∙ 𝑚𝑚
α = 1
𝑀î𝑒𝑐0 = 02 + 1842002 = 184200 𝑁 ∙ 𝑚𝑚
𝑀î𝑒𝑐1 = 2866752 + 1842002 = 340752.688 𝑁 ∙ 𝑚𝑚
𝑀î𝑒𝑐2 = 02 + 1842002 = 184200 𝑁 ∙ 𝑚𝑚
𝑀î𝑒𝑐3 = 3261522 + 1842002 = 374572.873 𝑁 ∙ 𝑚𝑚
44
d = 32 ∙ 𝑀î𝑒𝑐
3.14 ∙ 𝜍𝑒𝑐
3
= 32 ∙ 374572.873
3.14 ∙ 140
3
= 29.08 𝑚𝑚
𝜍𝑎𝑑𝑚𝑖𝑠𝑖𝑏𝑖𝑙 = 140 𝑁 ∙ 𝑚𝑚
Verificare: trebuie sa indeplineasca conditia:
𝐷𝑝𝑖𝑐𝑖𝑜𝑟 > 𝑑 𝑎𝑟𝑏𝑜𝑟𝑒
Diametrul de divizare 𝐷𝑑1, al rotii z1 este:
𝐷𝑑 = 37.5 𝑚𝑚
mn= 2.25
Diametrul de picior al rotii este:
𝐷𝑝𝑖𝑐𝑖𝑜𝑟 = 𝐷𝑑 − 2 ∙ 1.25 ∙ 𝑚𝑛 => 𝐷𝑝𝑖𝑐𝑖𝑜𝑟 = 37.5− 2 ∙ 1.25 ∙ 2.25 = 31.875 mm
31.875 > 29.08 => 𝐷𝑝𝑖𝑐𝑖𝑜𝑟 > 𝑑 𝑎𝑟𝑏𝑜𝑟𝑒
Treapta II:
1)Calculul fortelor in plan radial
Schema de încărcare și rezemare este următoarea:
𝐻1 + 𝐻2 + 𝐹𝑟2 = 0
𝑀𝑎 : 𝐹𝑟2 ∙ 𝑙1 −𝑀𝑖2 + 𝐻2 ∙ (𝑙1 + 𝑙2) = 0
𝑙1 = 103 𝑚𝑚
𝑙2 = 166 𝑚𝑚
𝑀𝑖2 = 𝐹𝑎2 · 𝑟𝑑2 = 3616 ∙ 23.75 = 85893.87 N ∙mm
𝐻2 =− 𝐹𝑟2 ∙ 𝑙1 +𝑀𝑖2
𝑙1 + 𝑙2=−3102.31 ∙ 103 + 85893.87
103 + 166= 1507.18 𝑁
𝐻1 = 𝐹𝑟2 − 𝐻2 = 3102.31− 1507.18 = 1595.13 𝑁
Verificare:
𝐻1 + 𝐻2 − 𝐹𝑟2 = 0 ⇔ 1507.18 + 1595.13 − 3102.31 = 0

45
𝑥1є 0, 𝑙1 ⇒𝑀𝑖𝐻 𝑥1 = 𝐻1 ∙ 𝑥1
𝑥1 = 0
𝑀(0) = 0
𝑥1 = 103
𝑀(103) = 𝐻1 ∙ 𝑙1 = 1507.18 ∙ 103 = 164298.61 𝑁 ∙ 𝑚𝑚
𝑥2є 0, 𝑙2 ⇒𝑀𝑖𝐻 𝑥2 = 𝐻2 ∙ 𝑥2
𝑥2 = 0
𝑀(0) = 0
𝑥2 = 166
𝑀(166) = 𝐻2 ∙ 𝑙2 = 1595.13 ∙ 166 = 250192.483 𝑁 ∙ 𝑚𝑚
2)Calculul fortelor in plan tangential
𝑉1 + 𝑉2 − 𝐹𝑡2 = 0
𝑀1 =−𝑉2 · 𝑙1 + 𝑙2 + 𝐹𝑡2 · 𝑙1 = 0
𝑉2 =𝐹𝑡2 · 𝑙1𝑙1 + 𝑙2
=7755.7 · 103
103 + 166= 2969.68 𝑁
𝑉1 = 𝐹𝑡2 − 𝑉2 = 7755.7− 2969.68 = 4786.1 𝑁
Verificare
𝑉1 + 𝑉2 − 𝐹𝑡2 = 0 ⇔ 4786.1 + 2969.68 − 7755.7 = 0
yє 0, 𝑙1 ⇒𝑀𝑖𝑉 𝑦1 = −𝑉1 ∙ 𝑦1
y = 0
𝑀(0) = 0
𝑦 = 103
𝑀(103) = −𝑉1 ∙ 𝑙1 = −4786.1 ∙ 103 = −492968.358 𝑁 ∙ 𝑚𝑚
46
𝑦2є 0, 𝑙2 ⇒𝑀𝑖𝑉 𝑥2 = −𝑉2 ∙ 𝑦2
y = 0
𝑀(0) = 0
𝑦 = 166
𝑀(166) = −𝑉2 ∙ 𝑙2 = −2969.68 ∙ 166 = −492968.358 𝑁 ∙ 𝑚𝑚
𝑀î𝑟𝑒𝑧 0 = (𝑀𝑖𝐻)2 + (𝑀𝑖𝑉)2 = 0 𝑁 ∙ 𝑚𝑚
𝑀î𝑟𝑒𝑧 1 = 164298.612 + (−492968.358)2 = 519626.632 𝑁 ∙ 𝑚𝑚
𝑀î𝑟𝑒𝑧 2 = 0 ∙ 0 = 0 𝑁 ∙ 𝑚𝑚
𝑀î𝑟𝑒𝑧 3 = 250192.4832 + (−492968.358)2 = 552823.734 𝑁 ∙ 𝑚𝑚
𝑀î𝑒𝑐 = 𝑀î𝑟𝑒𝑧2 + 𝛼 ·𝑀𝑡
2 𝑁 ∙ 𝑚𝑚
α = 1
𝑀î𝑒𝑐0 = 02 + 1842002 = 184200 𝑁 ∙ 𝑚𝑚
𝑀î𝑒𝑐1 = 519626.6322 + 1842002 = 551308.8 𝑁 ∙ 𝑚𝑚
𝑀î𝑒𝑐2 = 02 + 1842002 = 184200 𝑁 ∙ 𝑚𝑚
𝑀î𝑒𝑐3 = 552823.7342 + 1842002 = 582703.8 𝑁 ∙ 𝑚𝑚
d = 32 ∙ 𝑀î𝑒𝑐
3.14 ∙ 𝜍𝑒𝑐
3
= 32 ∙ 582703.8
3.14 ∙ 140
3
= 33.65 𝑚𝑚
𝜍𝑎𝑑𝑚𝑖𝑠𝑖𝑏𝑖𝑙 = 140 𝑁 ∙ 𝑚𝑚
Verificare: trebuie sa indeplineasca conditia:
𝐷𝑝𝑖𝑐𝑖𝑜𝑟 > 𝑑 𝑎𝑟𝑏𝑜𝑟𝑒
Diametrul de divizare 𝐷𝑑 , al rotii z2 este:
𝐷𝑑 = 47.5 𝑚𝑚
mn= 2.25

47
Diametrul de picior al rotii este:
𝐷𝑝𝑖𝑐𝑖𝑜𝑟 = 𝐷𝑑 − 2 ∙ 1.25 ∙ 𝑚𝑛 => 𝐷𝑝𝑖𝑐𝑖𝑜𝑟 = 47.5− 2 ∙ 1.25 ∙ 2.25 = 41.875 mm
41.875 > 33.65 => 𝐷𝑝𝑖𝑐𝑖𝑜𝑟 > 𝑑 𝑎𝑟𝑏𝑜𝑟𝑒
Treapta III
1)Calculul fortelor in plan radial
Schema de încărcare și rezemare este următoarea:
𝐻1 + 𝐻2 + 𝐹𝑟3 = 0
𝑀𝑎 : 𝐹𝑟3 ∙ 𝑙1 −𝑀𝑖3 + 𝐻2 ∙ (𝑙1 + 𝑙2) = 0
𝑙1 = 137 𝑚𝑚
𝑙2 = 132 𝑚𝑚
𝑀𝑖3 = 𝐹𝑎3 · 𝑟𝑑3 = 2987.6 ∙ 28.75 = 85893.87 N ∙mm
𝐻2 =− 𝐹𝑟3 ∙ 𝑙1 +𝑀𝑖3
𝑙1 + 𝑙2=−2562.78 ∙ 137 + 85893.87
137 + 132= 1624.51 𝑁
𝐻1 = 𝐹𝑟3 − 𝐻2 = 2562.78− 1624.51 = 938.265 𝑁
Verificare:
𝐻1 + 𝐻2 − 𝐹𝑟1 = 0 ⇔ 1624.51 + 938.265 − 2562.78 = 0
𝑥1є 0, 𝑙1 ⇒𝑀𝑖𝐻 𝑥1 = 𝐻1 ∙ 𝑥1
𝑥1 = 0
48
𝑀(0) = 0
𝑥1 = 137
𝑀(137) = 𝐻1 ∙ 𝑙1 = 1624.51 ∙ 137 = 128542.38 𝑁 ∙ 𝑚𝑚
𝑥2є 0, 𝑙2 ⇒𝑀𝑖𝐻 𝑥2 = 𝐻2 ∙ 𝑥2
𝑥2 = 0
𝑀(0) = 0
𝑥2 = 132
𝑀(132) = 𝐻2 ∙ 𝑙2 = 938.265 ∙ 132 = 214436.251 𝑁 ∙ 𝑚𝑚
2)Calculul fortelor in plan tangential
𝑉1 + 𝑉2 − 𝐹𝑡3 = 0
𝑀1 =−𝑉2 · 𝑙1 + 𝑙2 + 𝐹𝑡3 · 𝑙1 = 0
𝑉2 =𝐹𝑡3 · 𝑙1𝑙1 + 𝑙2
=6406.95 · 137
137 + 132= 3263.02 𝑁
𝑉1 = 𝐹𝑡3 − 𝑉2 = 6406.95− 3263.02 = 3143.93 𝑁
Verificare
𝑉1 + 𝑉2 − 𝐹𝑡3 = 0 ⇔ 3143.93 + 3263.02 − 6406.95 = 0
yє 0, 𝑙1 ⇒𝑀𝑖𝑉 𝑦1 = −𝑉1 ∙ 𝑦1
y = 0
𝑀(0) = 0
𝑦 = 137
𝑀(137) = −𝑉1 ∙ 𝑙1 = −3143.93 ∙ 137 = −430718.96 𝑁 ∙ 𝑚𝑚
𝑦2є 0, 𝑙2 ⇒𝑀𝑖𝑉 𝑥2 = −𝑉2 ∙ 𝑦2
y = 0
𝑀(0) = 0
49
𝑦 = 132
𝑀(132) = −𝑉2 ∙ 𝑙2 = −3263.02 ∙ 132 = −430718.96 𝑁 ∙ 𝑚𝑚
𝑀î𝑟𝑒𝑧 0 = (𝑀𝑖𝐻)2 + (𝑀𝑖𝑉)2 = 0 𝑁 ∙ 𝑚𝑚
𝑀î𝑟𝑒𝑧 1 = 128542.3812 + (−430718.96)2 = 449490.791 𝑁 ∙ 𝑚𝑚
𝑀î𝑟𝑒𝑧 2 = 0 ∙ 0 = 0 𝑁 ∙ 𝑚𝑚
𝑀î𝑟𝑒𝑧 3 = 214436.2512 + (−430718.96)2 = 481146.27 𝑁 ∙ 𝑚𝑚
𝑀î𝑒𝑐 = 𝑀î𝑟𝑒𝑧2 + 𝛼 ·𝑀𝑡
2 𝑁 ∙ 𝑚𝑚
α = 1
𝑀î𝑒𝑐0 = 02 + 1842002 = 184200 𝑁 ∙ 𝑚𝑚
𝑀î𝑒𝑐1 = 449490.7912 + 1842002 = 485769 𝑁 ∙ 𝑚𝑚
𝑀î𝑒𝑐2 = 02 + 1842002 = 184200 𝑁 ∙ 𝑚𝑚
𝑀î𝑒𝑐3 = 481146.272 + 1842002 = 515200.32 𝑁 ∙ 𝑚𝑚
d = 32 ∙ 𝑀î𝑒𝑐
3.14 ∙ 𝜍𝑒𝑐
3
= 32 ∙ 515200.32
3.14 ∙ 140
3
= 32.31 𝑚𝑚
𝜍𝑎𝑑𝑚𝑖𝑠𝑖 𝑏𝑖𝑙 = 140 𝑁 ∙ 𝑚𝑚
Verificare: trebuie sa indeplineasca conditia:
𝐷𝑝𝑖𝑐𝑖𝑜𝑟 > 𝑑 𝑎𝑟𝑏𝑜𝑟𝑒
Diametrul de divizare 𝐷𝑑 , al rotii z3 este:
𝐷𝑑 = 57.5 𝑚𝑚
mn= 2.25
Diametrul de picior al rotii este:
𝐷𝑝𝑖𝑐𝑖𝑜𝑟 = 𝐷𝑑 − 2 ∙ 1.25 ∙ 𝑚𝑛 => 𝐷𝑝𝑖𝑐𝑖𝑜𝑟 = 57.5− 2 ∙ 1.25 ∙ 2.25 = 51.875 mm

50
51.875 > 32.31 => 𝐷𝑝𝑖𝑐𝑖𝑜𝑟 > 𝑑 𝑎𝑟𝑏𝑜𝑟𝑒
Treapta IV:
1)Calculul fortelor in plan radial
Schema de încărcare și rezemare este următoarea:
𝐻1 + 𝐻2 + 𝐹𝑟4 = 0
𝑀𝑎 : 𝐹𝑟4 ∙ 𝑙1 −𝑀𝑖4 + 𝐻2 ∙ (𝑙1 + 𝑙2) = 0
𝑙1 = 240 𝑚𝑚
𝑙2 = 29 𝑚𝑚
𝑀𝑖4 = 𝐹𝑎4 · 𝑟𝑑4 = 2454.11 ∙ 35 = 85893.87 N ∙mm
𝐻2 =− 𝐹𝑟4 ∙ 𝑙1 +𝑀𝑖4
𝑙1 + 𝑙2=−2105.14 ∙ 240 + 85893.87
240 + 29= −2197.5 𝑁
𝐻2 = −𝐹𝑟4 − 𝐻2 = −2105.14 + 2197.5 = 92.35 𝑁
Verificare:
𝐻1 + 𝐻2 − 𝐹𝑟4 = 0 ⇔ 2197.5 + 92.35− 2105.14 = 0
𝑥1є 0, 𝑙1 ⇒𝑀𝑖𝐻 𝑥1 = 𝐻1 ∙ 𝑥1
𝑥1 = 0
𝑀(0) = 0
𝑥1 = 240
𝑀 29 = 𝐻1 ∙ 𝑙1 = −92.35 ∙ 240 = 22166.29 𝑁 ∙ 𝑚𝑚
𝑥2є 0, 𝑙2 ⇒𝑀𝑖𝐻 𝑥2 = 𝐻2 ∙ 𝑥2
𝑥2 = 0
51
𝑀(0) = 0
𝑥2 = 29
𝑀(240) = 𝐻2 ∙ 𝑙2 = 2197.5 ∙ 29 = 63727.57 𝑁 ∙ 𝑚𝑚
2)Calculul fortelor in plan tangential
𝑉1 + 𝑉2 − 𝐹𝑡4 = 0
𝑀1 =−𝑉2 · 𝑙1 + 𝑙2 + 𝐹𝑡4 · 𝑙1 = 0
𝑉2 =𝐹𝑡4 · 𝑙1𝑙1 + 𝑙2
=5262.85 · 29
240 + 29= 4695.48 𝑁
𝑉1 = 𝐹𝑡4 − 𝑉2 = 5262.85− 4695.48 = 567.37 𝑁
Verificare
𝑉1 + 𝑉2 − 𝐹𝑡4 = 0 ⇔ 567.37 + 4695.48 − 5262.8 = 0
yє 0, 𝑙1 ⇒𝑀𝑖𝑉 𝑦1 = −𝑉1 ∙ 𝑦1
y = 0
𝑀(0) = 0
𝑦 = 240
𝑀(29) = −𝑉1 ∙ 𝑙1 = −567.37 ∙ 240 = −136169.09 𝑁 ∙ 𝑚𝑚
𝑦2є 0, 𝑙2 ⇒𝑀𝑖𝑉 𝑥2 = −𝑉2 ∙ 𝑦2
y = 0
𝑀(0) = 0
𝑦 = 29
𝑀(240) = −𝑉2 ∙ 𝑙2 = −4695.48 ∙ 29 = −136169.09 𝑁 ∙ 𝑚𝑚
𝑀î𝑟𝑒𝑧 0 = (𝑀𝑖𝐻)2 + (𝑀𝑖𝑉)2 = 0 𝑁 ∙ 𝑚𝑚
𝑀î𝑟𝑒𝑧 1 = 22166.292 + (−136169.09)2 = 137961.467 𝑁 ∙ 𝑚𝑚
𝑀î𝑟𝑒𝑧 2 = 0 ∙ 0 = 0 𝑁 ∙ 𝑚𝑚
52
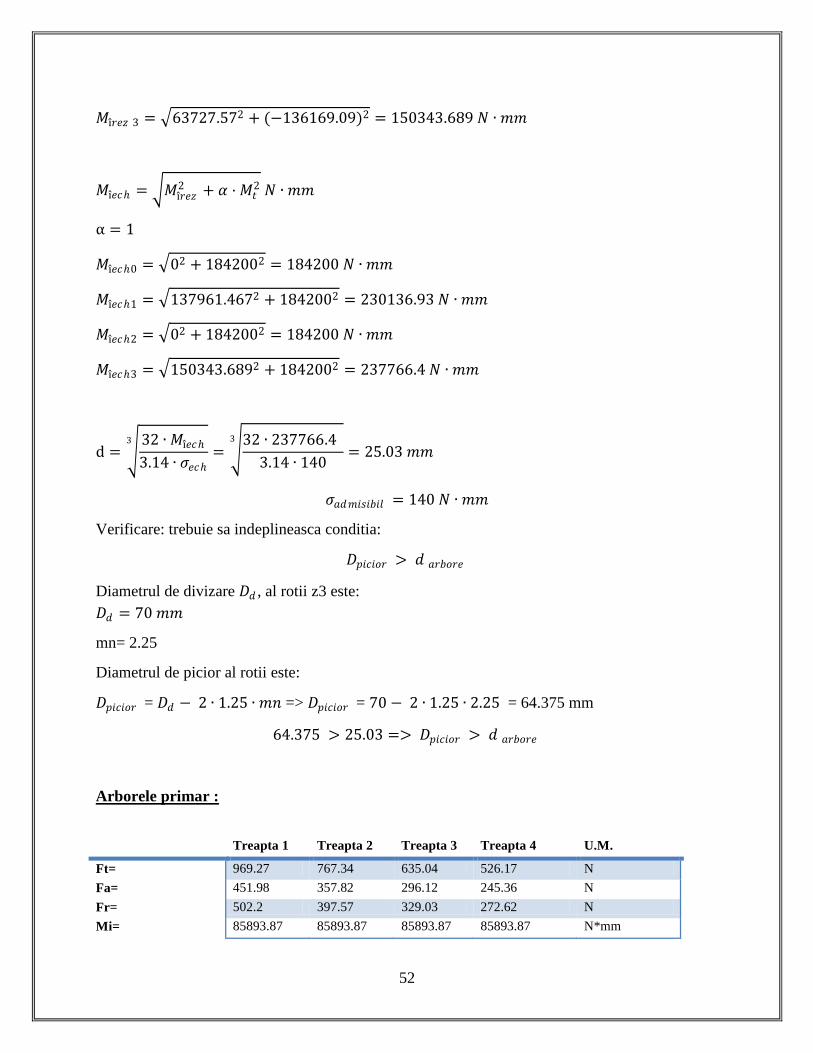
𝑀î𝑟𝑒𝑧 3 = 63727.572 + (−136169.09)2 = 150343.689 𝑁 ∙ 𝑚𝑚
𝑀î𝑒𝑐 = 𝑀î𝑟𝑒𝑧2 + 𝛼 ·𝑀𝑡
2 𝑁 ∙ 𝑚𝑚
α = 1
𝑀î𝑒𝑐0 = 02 + 1842002 = 184200 𝑁 ∙ 𝑚𝑚
𝑀î𝑒𝑐1 = 137961.4672 + 1842002 = 230136.93 𝑁 ∙ 𝑚𝑚
𝑀î𝑒𝑐2 = 02 + 1842002 = 184200 𝑁 ∙ 𝑚𝑚
𝑀î𝑒𝑐3 = 150343.6892 + 1842002 = 237766.4 𝑁 ∙ 𝑚𝑚
d = 32 ∙ 𝑀î𝑒𝑐
3.14 ∙ 𝜍𝑒𝑐
3
= 32 ∙ 237766.4
3.14 ∙ 140
3
= 25.03 𝑚𝑚
𝜍𝑎𝑑𝑚𝑖𝑠𝑖𝑏𝑖𝑙 = 140 𝑁 ∙ 𝑚𝑚
Verificare: trebuie sa indeplineasca conditia:
𝐷𝑝𝑖𝑐𝑖𝑜𝑟 > 𝑑 𝑎𝑟𝑏𝑜𝑟𝑒
Diametrul de divizare 𝐷𝑑 , al rotii z3 este:
𝐷𝑑 = 70 𝑚𝑚
mn= 2.25
Diametrul de picior al rotii este:
𝐷𝑝𝑖𝑐𝑖𝑜𝑟 = 𝐷𝑑 − 2 ∙ 1.25 ∙ 𝑚𝑛 => 𝐷𝑝𝑖𝑐𝑖𝑜𝑟 = 70 − 2 ∙ 1.25 ∙ 2.25 = 64.375 mm
64.375 > 25.03 => 𝐷𝑝𝑖𝑐𝑖𝑜𝑟 > 𝑑 𝑎𝑟𝑏𝑜𝑟𝑒
Arborele primar :
Treapta 1 Treapta 2 Treapta 3 Treapta 4 U.M.
Ft= 969.27 767.34 635.04 526.17 N
Fa= 451.98 357.82 296.12 245.36 N
Fr= 502.2 397.57 329.03 272.62 N
Mi= 85893.87 85893.87 85893.87 85893.87 N*mm
53
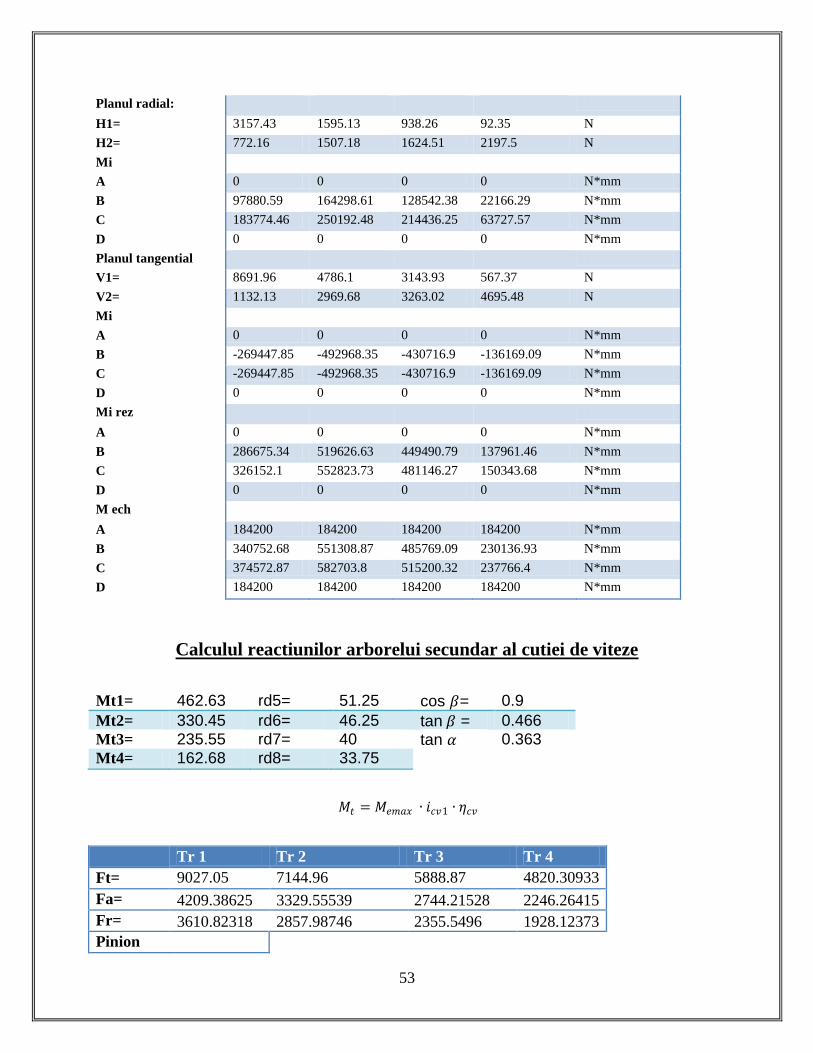
Planul radial:
H1= 3157.43 1595.13 938.26 92.35 N
H2= 772.16 1507.18 1624.51 2197.5 N
Mi
A 0 0 0 0 N*mm
B 97880.59 164298.61 128542.38 22166.29 N*mm
C 183774.46 250192.48 214436.25 63727.57 N*mm
D 0 0 0 0 N*mm
Planul tangential
V1= 8691.96 4786.1 3143.93 567.37 N
V2= 1132.13 2969.68 3263.02 4695.48 N
Mi
A 0 0 0 0 N*mm
B -269447.85 -492968.35 -430716.9 -136169.09 N*mm
C -269447.85 -492968.35 -430716.9 -136169.09 N*mm
D 0 0 0 0 N*mm
Mi rez
A 0 0 0 0 N*mm
B 286675.34 519626.63 449490.79 137961.46 N*mm
C 326152.1 552823.73 481146.27 150343.68 N*mm
D 0 0 0 0 N*mm
M ech
A 184200 184200 184200 184200 N*mm
B 340752.68 551308.87 485769.09 230136.93 N*mm
C 374572.87 582703.8 515200.32 237766.4 N*mm
D 184200 184200 184200 184200 N*mm
Calculul reactiunilor arborelui secundar al cutiei de viteze
𝑀𝑡 = 𝑀𝑒𝑚𝑎𝑥 ∙ 𝑖𝑐𝑣1 ∙ 𝜂𝑐𝑣
Tr 1 Tr 2 Tr 3 Tr 4
Ft= 9027.05 7144.96 5888.87 4820.30933
Fa= 4209.38625 3329.55539 2744.21528 2246.26415
Fr= 3610.82318 2857.98746 2355.5496 1928.12373
Pinion
Mt1= 462.63 rd5= 51.25 cos 𝛽= 0.9
Mt2= 330.45 rd6= 46.25 tan 𝛽 = 0.466 Mt3= 235.55 rd7= 40 tan 𝛼 0.363
Mt4= 162.68 rd8= 33.75
54
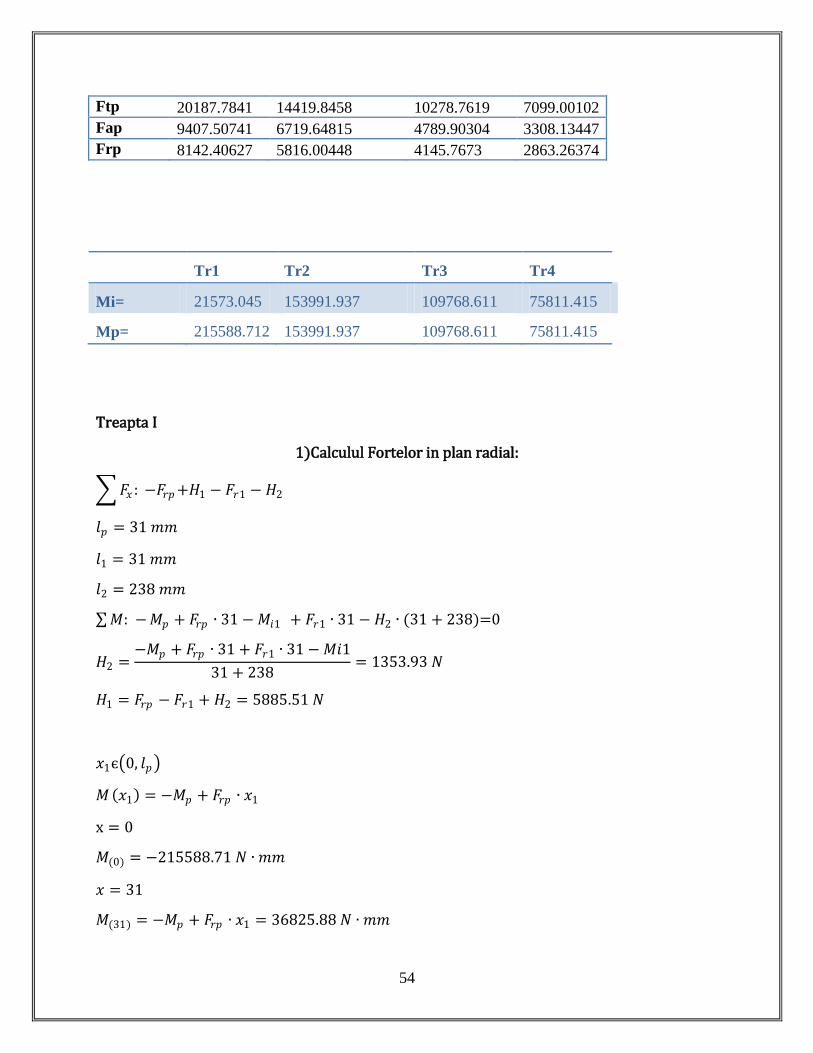
Ftp 20187.7841 14419.8458 10278.7619 7099.00102
Fap 9407.50741 6719.64815 4789.90304 3308.13447
Frp 8142.40627 5816.00448 4145.7673 2863.26374
Tr1 Tr2 Tr3 Tr4
Mi= 21573.045 153991.937 109768.611 75811.415
Mp= 215588.712 153991.937 109768.611 75811.415
Treapta I
1)Calculul Fortelor in plan radial:
𝐹𝑥 : −𝐹𝑟𝑝+𝐻1 − 𝐹𝑟1 − 𝐻2
𝑙𝑝 = 31 𝑚𝑚
𝑙1 = 31 𝑚𝑚
𝑙2 = 238 𝑚𝑚
𝑀: −𝑀𝑝 + 𝐹𝑟𝑝 ∙ 31 −𝑀𝑖1 + 𝐹𝑟1 ∙ 31 − 𝐻2 ∙ (31 + 238)=0
𝐻2 =−𝑀𝑝 + 𝐹𝑟𝑝 ∙ 31 + 𝐹𝑟1 ∙ 31 −𝑀𝑖1
31 + 238= 1353.93 𝑁
𝐻1 = 𝐹𝑟𝑝 − 𝐹𝑟1 + 𝐻2 = 5885.51 𝑁
𝑥1є 0, 𝑙𝑝
𝑀 𝑥1 = −𝑀𝑝 + 𝐹𝑟𝑝 ∙ 𝑥1
x = 0
𝑀(0) = −215588.71 𝑁 ∙ 𝑚𝑚
𝑥 = 31
𝑀(31) = −𝑀𝑝 + 𝐹𝑟𝑝 ∙ 𝑥1 = 36825.88 𝑁 ∙ 𝑚𝑚

55
𝑥2є 0, 𝑙1 ⇒𝑀 𝑥2 = −𝑀𝑝 + 𝐹𝑟𝑝 ∙ (31 + 𝑥2) − 𝐻1 ∙ 𝑥2
x = 0
𝑀(0) = 36825.88 𝑁 ∙ 𝑚𝑚
𝑥 = 31
𝑀(31) = −𝑀𝑝 + 𝐹𝑟𝑝 ∙ (31 + 𝑥2)− 𝐻1 ∙ 𝑥2 = 106789.879 𝑁 ∙ 𝑚𝑚
𝑥3є 0, 𝑙2 ⇒𝑀 𝑥3 = 𝐻2 ∙ 𝑥3
x = 0
𝑀(0) = 0
𝑥 = 21
𝑀 238 = 𝐻2 ∙ 𝑥3 = 322235.879 𝑁 ∙ 𝑚𝑚
2)Calculul Fortelor in plan tangential
𝐹𝑥 : −𝐹𝑡1−𝑉1 − 𝐹𝑡𝑝 + 𝑉2=0
𝑙𝑝 = 31 𝑚𝑚
𝑙1 = 31 𝑚𝑚
𝑙2 = 238 𝑚𝑚
𝑀: 𝐹𝑡𝑝 ∙ 33 − 𝐹𝑡1 ∙ 31 + 𝑉2 ∙ (31 + 238)
𝑉2 =− 𝐹𝑡𝑝 ∙31+𝐹𝑡1 ∙31
31+238= −286.18 N
𝑉1 = − 𝐹𝑡𝑝 − 𝐹𝑡1 + 𝑉2 = −30501.02 𝑁
𝑥1є 0, 𝑙𝑝
56
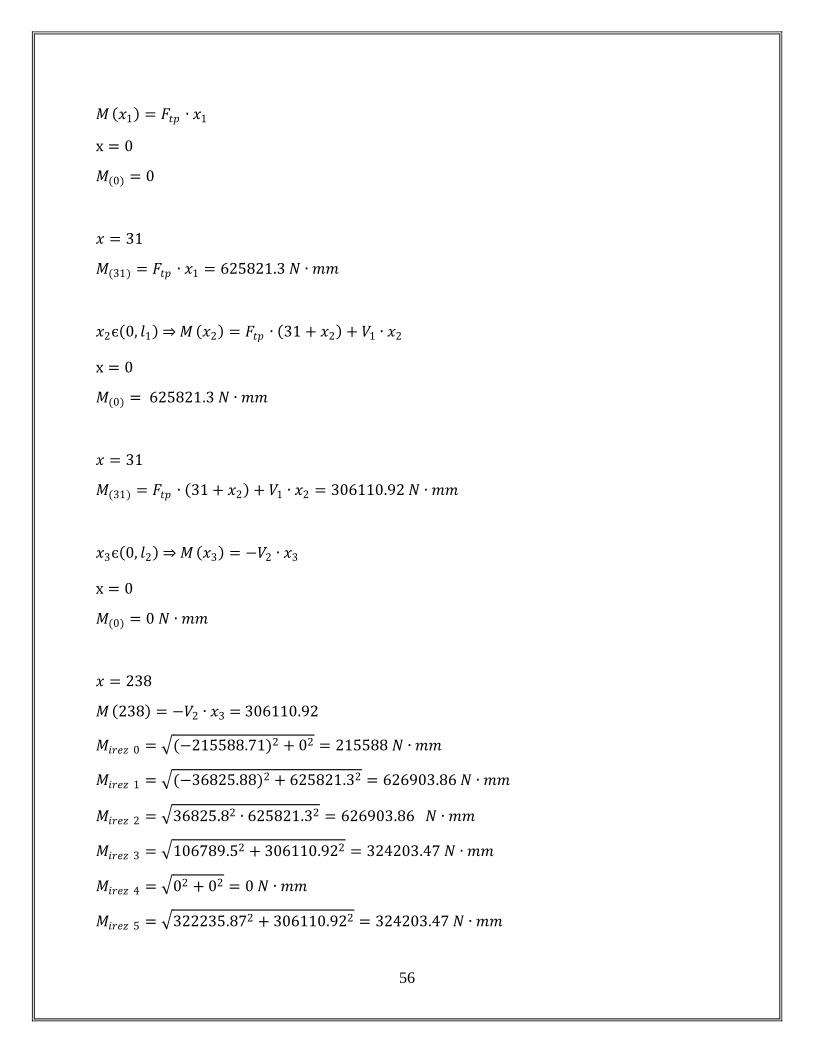
𝑀 𝑥1 = 𝐹𝑡𝑝 ∙ 𝑥1
x = 0
𝑀(0) = 0
𝑥 = 31
𝑀(31) = 𝐹𝑡𝑝 ∙ 𝑥1 = 625821.3 𝑁 ∙ 𝑚𝑚
𝑥2є 0, 𝑙1 ⇒𝑀 𝑥2 = 𝐹𝑡𝑝 ∙ 31 + 𝑥2 + 𝑉1 ∙ 𝑥2
x = 0
𝑀(0) = 625821.3 𝑁 ∙ 𝑚𝑚
𝑥 = 31
𝑀(31) = 𝐹𝑡𝑝 ∙ 31 + 𝑥2 + 𝑉1 ∙ 𝑥2 = 306110.92 𝑁 ∙ 𝑚𝑚
𝑥3є 0, 𝑙2 ⇒𝑀 𝑥3 = −𝑉2 ∙ 𝑥3
x = 0
𝑀(0) = 0 𝑁 ∙ 𝑚𝑚
𝑥 = 238
𝑀 238 = −𝑉2 ∙ 𝑥3 = 306110.92
𝑀𝑖𝑟𝑒𝑧 0 = (−215588.71)2 + 02 = 215588 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑟𝑒𝑧 1 = (−36825.88)2 + 625821.32 = 626903.86 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑟𝑒𝑧 2 = 36825.82 ∙ 625821.32 = 626903.86 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑟𝑒𝑧 3 = 106789.52 + 306110.922 = 324203.47 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑟𝑒𝑧 4 = 02 + 02 = 0 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑟𝑒𝑧 5 = 322235.872 + 306110.922 = 324203.47 𝑁 ∙ 𝑚𝑚
57
𝑀𝑖𝑒𝑐 = 𝑀𝑖𝑟𝑒𝑧2 + 𝛼 · 𝑀𝑡
2 𝑁 ∙ 𝑚𝑚
α = 1
𝑀𝑖𝑒𝑐1 = 215588 .722 + 462.6362 = 215589.2 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐2 = 626903.862 + 462.6362 = 626904.03 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐3 = 626903.86 2 + 462.6362 = 626904.03 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐4 = 324203.472 + 462.6362 = 324203.8 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐5 = 02 + 462.6362 = 462.636 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐6 = 324203.47 2 + 462.6362 = 444454.803 𝑁 ∙ 𝑚𝑚
darbore = 32 ∙ 𝑀𝑖𝑒𝑐
3.14 ∙ 𝜍𝑒𝑐
3
= 32 ∙ 626904.03
3.14 ∙ 140
3
= 34.47 𝑚𝑚
𝜍𝑎𝑑𝑚𝑖𝑠𝑖𝑏𝑖𝑙 = 140 𝑁 ∙ 𝑚𝑚
𝐷𝑑 = 102.5 𝑚𝑚
mn= 2.25
𝐷𝑝𝑖𝑐𝑖𝑜𝑟 = 𝐷𝑑 − 2 ∙ 1.25 ∙ 𝑚𝑛 => 𝐷𝑝𝑖𝑐𝑖𝑜𝑟 =102.5− 2 ∙ 1.25 ∙ 2.25 = 96.875 mm
Treapta II
1)Calculul Fortelor in plan radial:
𝐹𝑥 : −𝐹𝑟𝑝+𝐻1 − 𝐹𝑟2 − 𝐻2
𝑙𝑝 = 31 𝑚𝑚
𝑙1 = 103 𝑚𝑚
𝑙2 = 166 𝑚𝑚

58
𝑀: −𝑀𝑝 + 𝐹𝑟𝑝 ∙ 31 −𝑀𝑖2 + 𝐹𝑟2 ∙ 103 − 𝐻2 ∙ (103 + 169)
𝐻2 =−𝑀𝑝 + 𝐹𝑟𝑝 ∙ 31 + 𝐹𝑟2 ∙ 103 −𝑀𝑖1
103 + 166= 619.64 𝑁
𝐻1 = 𝐹𝑟𝑝 − 𝐹𝑟2 + 𝐻2 = 3577.66 𝑁
𝑥1є 0, 𝑙𝑝
𝑀 𝑥1 = −𝑀𝑝 + 𝐹𝑟𝑝 ∙ 𝑥1
x = 0
𝑀(0) = −153991.93 𝑁 ∙ 𝑚𝑚
𝑥 = 31
𝑀(31) = −𝑀𝑝 + 𝐹𝑟𝑝 ∙ 𝑥1 = 26304.202 𝑁 ∙ 𝑚𝑚
𝑥2є 0, 𝑙1 ⇒𝑀 𝑥2 = −𝑀𝑝 + 𝐹𝑟𝑝 ∙ (31 + 𝑥2) − 𝐻1 ∙ 𝑥2
x = 0
𝑀(0) = 26304.202 𝑁 ∙ 𝑚𝑚
𝑥 = 103
𝑀(103) = −𝑀𝑝 + 𝐹𝑟𝑝 ∙ (33 + 𝑥2)− 𝐻1 ∙ 𝑥2 = 675605.61 𝑁 ∙ 𝑚𝑚
𝑥3є 0, 𝑙2 ⇒𝑀 𝑥3 = 𝐻2 ∙ 𝑥3
x = 0
𝑀(0) = 0
𝑥 = 166
𝑀 166 = 𝐻2 ∙ 𝑥3 = 102861.35
2)Calculul Fortelor in plan tangential
𝐹𝑥 : −𝐹𝑡2−𝑉1 − 𝐹𝑡𝑝 + 𝑉2
𝑙𝑝 = 31 𝑚𝑚
𝑙1 = 103 𝑚𝑚
59
𝑙2 = 166 𝑚𝑚
𝑀: 𝐹𝑡𝑝 ∙ 31 − 𝐹𝑡2 ∙ 103 + 𝑉2 ∙ (103 + 166)
𝑉2 =− 𝐹𝑡𝑝 ∙31+𝐹𝑡2 ∙103
103+166= −4697.95 N
𝑉1 = − 𝐹𝑡𝑝 − 𝐹𝑡2 + 𝑉2 = −26262.77 𝑁
𝑥1є 0, 𝑙𝑝
𝑀 𝑥1 = 𝐹𝑡𝑝 ∙ 𝑥1
x = 0
𝑀(0) = 0
𝑥 = 331
𝑀(31) = 𝐹𝑡𝑝 ∙ 𝑥1 = 26304.2 𝑁 ∙ 𝑚𝑚
𝑥2є 0, 𝑙1 ⇒𝑀 𝑥2 = 𝐹𝑡𝑝 ∙ 31 + 𝑥2 + 𝑉1 ∙ 𝑥2
x = 0
𝑀(0) = 26304.2 𝑁 ∙ 𝑚𝑚
𝑥 = 103
𝑀(103) = 𝐹𝑡𝑝 ∙ 31 + 𝑥2 + 𝑉1 ∙ 𝑥2 = 772805.99 𝑁 ∙ 𝑚𝑚
𝑥3є 0, 𝑙2 ⇒𝑀 𝑥3 = −𝑉2 ∙ 𝑥3
x = 0
𝑀(0) = 0 𝑁 ∙ 𝑚𝑚
𝑥 = 166
𝑀 166 = −𝑉2 ∙ 𝑥3 = 772805.99 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑟𝑒𝑧 0 = (−153991.93)2 + 02 = 143696.22 𝑁 ∙ 𝑚𝑚
60
𝑀𝑖𝑟𝑒𝑧 1 = (26304.2)2 + 447015.222 = 447788.47 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑟𝑒𝑧 2 = 675605.612 ∙ 447015.222 = 447788.47 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑟𝑒𝑧 3 = 675605.612 + 772805.652 = 1026485.29 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑟𝑒𝑧 4 = 02 + 02 = 0 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑟𝑒𝑧 5 = 102861.3592 + 779860.652 = 786615 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐 = 𝑀𝑖𝑟𝑒𝑧2 + 𝛼 · 𝑀𝑡
2 𝑁 ∙ 𝑚𝑚
α = 1
𝑀𝑖𝑒𝑐1 = 143696.222 + 3304542 = 153992.29 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐2 = 447788.472 + 3304542 = 447788.47 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐3 = 447788.47 2 + 3304542 = 447788.47 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐4 = 1026485.292 + 3304542 = 1026485 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐5 = 02 + 3304542 = 308361 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐6 = 786615 2 + 3304542 = 786615 𝑁 ∙ 𝑚𝑚
darbore = 32 ∙ 𝑀𝑖𝑒𝑐
3.14 ∙ 𝜍𝑒𝑐
3
= 32 ∙ 1026485
3.14 ∙ 140
3
= 40.56 𝑚𝑚
𝜍𝑎𝑑𝑚𝑖𝑠𝑖𝑏𝑖𝑙 = 140 𝑁 ∙ 𝑚𝑚
𝐷𝑑 = 92.5 𝑚𝑚
mn= 2.25
𝐷𝑝𝑖𝑐𝑖𝑜𝑟 = 𝐷𝑑 − 2 ∙ 1.25 ∙ 𝑚𝑛 => 𝐷𝑝𝑖𝑐𝑖𝑜𝑟 = 92. 5 − 2 ∙ 1.25 ∙ 2.25 = 86.875 mm

61
Treapta III
1)Calculul Fortelor in plan radial:
𝐹𝑥 : −𝐹𝑟𝑝+𝐻1 − 𝐹𝑟3 − 𝐻2=0
𝑙𝑝 = 31 𝑚𝑚
𝑙1 = 137 𝑚𝑚
𝑙2 = 132 𝑚𝑚
𝑀: −𝑀𝑝 + 𝐹𝑟𝑝 ∙ 31 −𝑀𝑖3 + 𝐹𝑟3 ∙ 137 − 𝐻2 ∙ (137 + 132)
𝐻2 =−𝑀𝑝 + 𝐹𝑟𝑝 ∙ 31 + 𝐹𝑟3 ∙ 137 −𝑀𝑖3
137 + 132= 861.3 𝑁
𝐻1 = 𝐹𝑟𝑝 − 𝐹𝑟3 + 𝐻2 = 1369.02 𝑁
𝑥1є 0, 𝑙𝑝
𝑀 𝑥1 = −𝑀𝑝 + 𝐹𝑟𝑝 ∙ 𝑥1
x = 0
𝑀(0) = −109768.61 𝑁 ∙ 𝑚𝑚
𝑥 = 31
𝑀(31) = −𝑀𝑝 + 𝐹𝑟𝑝 ∙ 𝑥1 = 18750.17 𝑁 ∙ 𝑚𝑚
𝑥2є 0, 𝑙1 ⇒𝑀 𝑥2 = −𝑀𝑝 + 𝐹𝑟𝑝 ∙ (31 + 𝑥2) − 𝐻1 ∙ 𝑥2
x = 0
𝑀(0) = 18750.17 𝑁 ∙ 𝑚𝑚
𝑥 = 137
𝑀(137) = −𝑀𝑝 + 𝐹𝑟𝑝 ∙ (31 + 𝑥2)− 𝐻1 ∙ 𝑥2 = 399164.257 𝑁 ∙ 𝑚𝑚
𝑥3є 0, 𝑙2 ⇒𝑀 𝑥3 = 𝐻2 ∙ 𝑥3
x = 0
62
𝑀(0) = 0
𝑥 = 132
𝑀 132 = 𝐻2 ∙ 𝑥3 = 113692.659 𝑁 ∙ 𝑚𝑚
2)Calculul Fortelor in plan tangential
𝐹𝑥 : −𝐹𝑡3−𝑉1 − 𝐹𝑡𝑝 + 𝑉2
𝑙𝑝 = 31 𝑚𝑚
𝑙1 = 137 𝑚𝑚
𝑙2 = 132 𝑚𝑚
𝑀: 𝐹𝑡𝑝 ∙ 31 − 𝐹𝑡3 ∙ 137 + 𝑉2 ∙ (137 + 132)
𝑉2 =− 𝐹𝑡𝑝 ∙33+𝐹𝑡2 ∙137
137+132= −4556.265.15 N
𝑉1 = − 𝐹𝑡𝑝 − 𝐹𝑡3 + 𝑉2 = −17544.11 𝑁
𝑥1є 0, 𝑙𝑝
𝑀 𝑥1 = 𝐹𝑡𝑝 ∙ 𝑥1
x = 0
𝑀(0) = 0
𝑥 = 331
𝑀(31) = 𝐹𝑡𝑝 ∙ 𝑥1 = 318641.61 𝑁 ∙ 𝑚𝑚
𝑥2є 0, 𝑙1 ⇒𝑀 𝑥2 = 𝐹𝑡𝑝 ∙ 31 + 𝑥2 + 𝑉1 ∙ 𝑥2
x = 0
𝑀(0) = 318641.61 𝑁 ∙ 𝑚𝑚
63
𝑥 = 137
𝑀(137) = 𝐹𝑡𝑝 ∙ 31 + 𝑥2 + 𝑉1 ∙ 𝑥2 = 676715.185 𝑁 ∙ 𝑚𝑚
𝑥3є 0, 𝑙2 ⇒𝑀 𝑥3 = −𝑉2 ∙ 𝑥3
x = 0
𝑀(0) = 0 𝑁 ∙ 𝑚𝑚
𝑥 = 132
𝑀 132 = −𝑉2 ∙ 𝑥3 = 676715.185 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑟𝑒𝑧 0 = (−109768.611)2 + 02 = 109768.61 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑟𝑒𝑧 1 = (18750.17)2 + 318641.612 = 319192.81 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑟𝑒 𝑧 2 = 18750.172 ∙ 318641.612 = 319192.81 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑟𝑒𝑧 3 = 399164.252 + 676715.182 = 785668.85 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑟𝑒𝑧 4 = 02 + 02 = 0 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑟𝑒𝑧 5 = 113692.652 + 601426.982 = 612078.78 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐 = 𝑀𝑖𝑟𝑒𝑧2 + 𝛼 · 𝑀𝑡
2 𝑁 ∙ 𝑚𝑚
α = 1
𝑀𝑖𝑒𝑐1 = 109768.61 2 + 2355542 = 109768.86 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐2 = 319192.812 + 2355542 = 319192.897 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐3 = 319192.81 2 + 2355542 = 319192.897 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐4 = 785668.852 + 2355542 = 785668.88 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐5 = 02 + 2355542 = 235554𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐6 = 612078.78 2 + 2355542 = 612078.82 𝑁 ∙ 𝑚𝑚
64
darbore = 32 ∙ 𝑀𝑖𝑒𝑐
3.14 ∙ 𝜍𝑒𝑐
3
= 32 ∙ 785668.88
3.14 ∙ 140
3
= 37.14 𝑚𝑚
𝜍𝑎𝑑𝑚𝑖𝑠𝑖𝑏𝑖𝑙 = 140 𝑁 ∙ 𝑚𝑚
𝐷𝑑 = 80 𝑚𝑚
mn= 2.25
𝐷𝑝𝑖𝑐𝑖𝑜𝑟 = 𝐷𝑑 − 2 ∙ 1.25 ∙ 𝑚𝑛 => 𝐷𝑝𝑖𝑐𝑖𝑜𝑟 = 80− 2 ∙ 1.25 ∙ 2.25 = 74.375 mm
Treapta IV
1)Calculul Fortelor in plan radial:
𝐹𝑥 : −𝐹𝑟𝑝+𝐻1 − 𝐹𝑟4 − 𝐻2
𝑙𝑝 = 31 𝑚𝑚
𝑙1 = 240 𝑚𝑚
𝑙2 = 29 𝑚𝑚
𝑀: −𝑀𝑝 + 𝐹𝑟𝑝 ∙ 31 −𝑀𝑖4 + 𝐹𝑟4 ∙ 240 − 𝐻2 ∙ (240 + 29)
𝐻2 =−𝑀𝑝 + 𝐹𝑟𝑝 ∙ 31 + 𝐹𝑟4 ∙ 240 − 𝑀𝑖4
240 + 29= 1486.57 𝑁
𝐻1 = 𝐹𝑟𝑝 − 𝐹𝑟4 + 𝐻2 = 2421.71 𝑁
𝑥1є 0, 𝑙𝑝
𝑀 𝑥1 = −𝑀𝑝 + 𝐹𝑟𝑝 ∙ 𝑥1
x = 0
𝑀(0) = −75811.415 𝑁 ∙ 𝑚𝑚
𝑥 = 31
𝑀(33) = −𝑀𝑝 + 𝐹𝑟𝑝 ∙ 𝑥1 = 12949.76 𝑁 ∙ 𝑚𝑚
65
𝑥2є 0, 𝑙1 ⇒𝑀 𝑥2 = −𝑀𝑝 + 𝐹𝑟𝑝 ∙ (31 + 𝑥2) − 𝐻1 ∙ 𝑥2
x = 0
𝑀(0) = 12949.76 𝑁 ∙ 𝑚𝑚
𝑥 = 240
𝑀(240) = −𝑀𝑝 + 𝐹𝑟𝑝 ∙ (31 + 𝑥2)− 𝐻1 ∙ 𝑥2 = 118922 𝑁 ∙ 𝑚𝑚
𝑥3є 0, 𝑙2 ⇒𝑀 𝑥3 = 𝐻2 ∙ 𝑥3
x = 0
𝑀(0) = 0
𝑥 = 29
𝑀 29 = 𝐻2 ∙ 𝑥3 = 43110.6 𝑁 ∙ 𝑚𝑚
2)Calculul Fortelor in plan tangential
𝐹𝑥 : −𝐹𝑡4−𝑉1 − 𝐹𝑡𝑝 + 𝑉2
𝑙𝑝 = 31 𝑚𝑚
𝑙1 = 240 𝑚𝑚
𝑙2 = 29 𝑚𝑚
𝑀: 𝐹𝑡𝑝 ∙ 31 − 𝐹𝑡4 ∙ 240 + 𝑉2 ∙ (240 + 29)
𝑉2 =− 𝐹𝑡𝑝 ∙31+𝐹𝑡4 ∙240
240+29= −5778.18 N
𝑉1 = − 𝐹𝑡𝑝 − 𝐹𝑡4 + 𝑉2 = −17697.49 𝑁
𝑥1є 0, 𝑙𝑝
𝑀 𝑥1 = 𝐹𝑡𝑝 ∙ 𝑥1
x = 0
66
𝑀(0) = 0
𝑥 = 31
𝑀(31) = 𝐹𝑡𝑝 ∙ 𝑥1 = 220069.03 𝑁 ∙ 𝑚𝑚
𝑥2є 0, 𝑙1 ⇒𝑀 𝑥2 = 𝐹𝑡𝑝 ∙ 31 + 𝑥2 + 𝑉1 ∙ 𝑥2
x = 0
𝑀(0) = 220069.03 𝑁 ∙ 𝑚𝑚
𝑥 = 240
𝑀(240) = 𝐹𝑡𝑝 ∙ 31 + 𝑥2 + 𝑉1 ∙ 𝑥2 = 2326609.89 𝑁 ∙ 𝑚𝑚
𝑥3є 0, 𝑙2 ⇒𝑀 𝑥3 = −𝑉2 ∙ 𝑥3
x = 0
𝑀(0) = 0 𝑁 ∙ 𝑚𝑚
𝑥 = 29
𝑀 29 = −𝑉2 ∙ 𝑥3 = 2326609.89 𝑁
𝑀𝑖𝑟𝑒𝑧 0 = (−75811.45)2 + 02 = 75811.45 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑟𝑒𝑧 1 = (12949.76)2 + 220069.0322 = 220449.71 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑟𝑒𝑧 2 = 12949.762 ∙ 220069.0322 = 220449.71 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑟𝑒𝑧 3 = 1189222 + 23235682 = 2326609.62 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑟𝑒𝑧 4 = 02 + 02 = 0 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑟𝑒𝑧 5 = 43110.62 + 23235682 = 173024 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐 = 𝑀𝑖𝑟𝑒𝑧2 + 𝛼 · 𝑀𝑡
2 𝑁 ∙ 𝑚𝑚
α = 1
𝑀𝑖𝑒𝑐1 = 67291.89 2 + 1626852 = 75811.58 𝑁 ∙ 𝑚𝑚
67
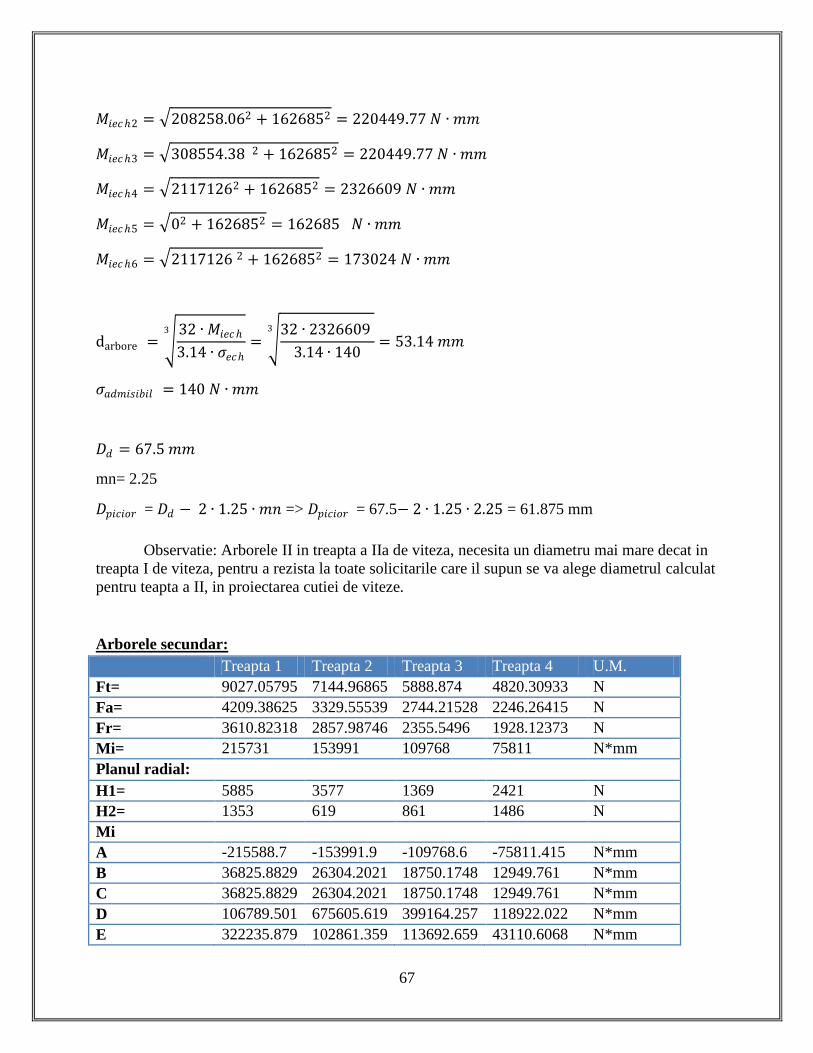
𝑀𝑖𝑒𝑐2 = 208258.062 + 1626852 = 220449.77 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐3 = 308554.38 2 + 1626852 = 220449.77 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐4 = 21171262 + 1626852 = 2326609 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐5 = 02 + 1626852 = 162685 𝑁 ∙ 𝑚𝑚
𝑀𝑖𝑒𝑐6 = 2117126 2 + 1626852 = 173024 𝑁 ∙ 𝑚𝑚
darbore = 32 ∙ 𝑀𝑖𝑒𝑐
3.14 ∙ 𝜍𝑒𝑐
3
= 32 ∙ 2326609
3.14 ∙ 140
3
= 53.14 𝑚𝑚
𝜍𝑎𝑑𝑚𝑖𝑠𝑖𝑏𝑖𝑙 = 140 𝑁 ∙ 𝑚𝑚
𝐷𝑑 = 67.5 𝑚𝑚
mn= 2.25
𝐷𝑝𝑖𝑐𝑖𝑜𝑟 = 𝐷𝑑 − 2 ∙ 1.25 ∙ 𝑚𝑛 => 𝐷𝑝𝑖𝑐𝑖𝑜𝑟 = 67.5− 2 ∙ 1.25 ∙ 2.25 = 61.875 mm
Observatie: Arborele II in treapta a IIa de viteza, necesita un diametru mai mare decat in
treapta I de viteza, pentru a rezista la toate solicitarile care il supun se va alege diametrul calculat
pentru teapta a II, in proiectarea cutiei de viteze.
Arborele secundar:
Treapta 1 Treapta 2 Treapta 3 Treapta 4 U.M.
Ft= 9027.05795 7144.96865 5888.874 4820.30933 N
Fa= 4209.38625 3329.55539 2744.21528 2246.26415 N
Fr= 3610.82318 2857.98746 2355.5496 1928.12373 N
Mi= 215731 153991 109768 75811 N*mm
Planul radial:
H1= 5885 3577 1369 2421 N
H2= 1353 619 861 1486 N
Mi
A -215588.7 -153991.9 -109768.6 -75811.415 N*mm
B 36825.8829 26304.2021 18750.1748 12949.761 N*mm
C 36825.8829 26304.2021 18750.1748 12949.761 N*mm
D 106789.501 675605.619 399164.257 118922.022 N*mm
E 322235.879 102861.359 113692.659 43110.6068 N*mm
68
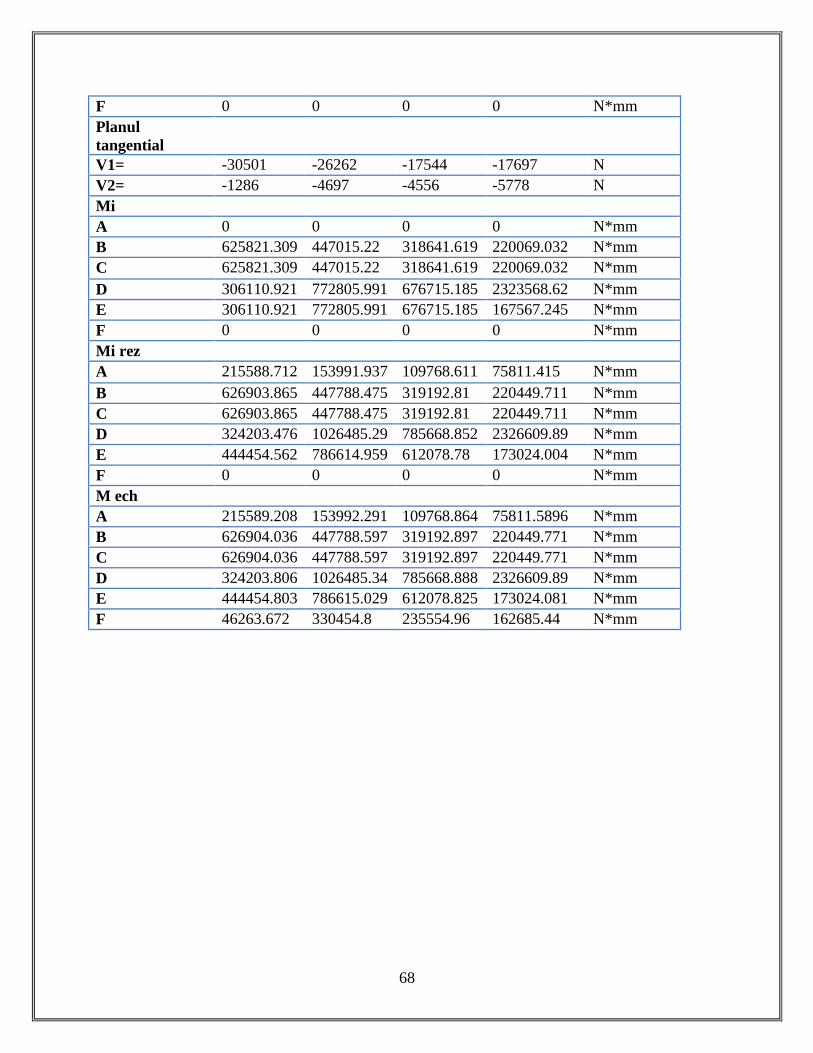
F 0 0 0 0 N*mm
Planul
tangential
V1= -30501 -26262 -17544 -17697 N
V2= -1286 -4697 -4556 -5778 N
Mi
A 0 0 0 0 N*mm
B 625821.309 447015.22 318641.619 220069.032 N*mm
C 625821.309 447015.22 318641.619 220069.032 N*mm
D 306110.921 772805.991 676715.185 2323568.62 N*mm
E 306110.921 772805.991 676715.185 167567.245 N*mm
F 0 0 0 0 N*mm
Mi rez
A 215588.712 153991.937 109768.611 75811.415 N*mm
B 626903.865 447788.475 319192.81 220449.711 N*mm
C 626903.865 447788.475 319192.81 220449.711 N*mm
D 324203.476 1026485.29 785668.852 2326609.89 N*mm
E 444454.562 786614.959 612078.78 173024.004 N*mm
F 0 0 0 0 N*mm
M ech
A 215589.208 153992.291 109768.864 75811.5896 N*mm
B 626904.036 447788.597 319192.897 220449.771 N*mm
C 626904.036 447788.597 319192.897 220449.771 N*mm
D 324203.806 1026485.34 785668.888 2326609.89 N*mm
E 444454.803 786615.029 612078.825 173024.081 N*mm
F 46263.672 330454.8 235554.96 162685.44 N*mm