autonomous underwater exploration using a …wuwnet.acm.org/2009/posters/poster12.pdf · autonomous...
TRANSCRIPT
Autonomous Underwater Exploration Using A Swarm ofMobile Sensor Nodes
Paul BenderMcNeese State University
Dept. of Mathematics, Computer Science, andStatistics
Box 92340McNeese State UniversityLake Charles,LA, 70609
Kay KussmannMcNeese State University
Dept. of Mathematics, Computer Science, andStatistics
Box 92340McNeese State UniversityLake Charles,LA, 70609
ABSTRACTUnderwater Sensor Networks are emerging applications forsensor network technologies. Many of the proposed appli-cations for underwater sensor networks assume the sensornodes will provide limited mobility capabilities of their own.
In this work we propose two related applications for anunderwater sensor network consisting of a swarm of Au-tonomous Underwater Vehicles cooperating to explore un-derwater caverns archaeological sites.
Categories and Subject DescriptorsI.2.9 [Robotics]: Autonomous vehicles; J.2 [PHYSICALSCIENCES AND ENGINEERING]: Archeology, Earthand atmospheric sciences, Engineering
General TermsUnderwater Sensor Networks, Robotic Systems
1. INTRODUCTIONExploration of underwater shipwrecks and caverns can bean exciting adventure for Archaeologists, Geologists, andhobbyists. Currently, these adventures require a human tobe directly involved in the exploration process.
Due to the extreme conditions, human exploration is im-practical in many cases. Working time on the ocean floor islimited due to limited oxygen supply.
Shipwrecks and underwater caverns are also hazardous dueto their maze like construction. Adding to the risks of send-ing a human underwater to explore such sites.
Remotely operated vehicles allow for increased time on thebottom, but they are limited in the distance they can travel
Figure 1: Conceptual drawing of an AUV swarminvestigating a shipwreck
from the vessel containing their operator by the length ofthe cable connecting them.
We propose a swarm of small Autonomous Underwater Ve-hicles (AUVs) can cooperatively explore shipwrecks and cav-erns without endangering human operators, and without thedistance limitations of a cabled network.
2. RELATED WORKSExisting literature has considered underwater sensor net-work nodes having limited movement capabilities [3, 2], theability to drift [4, 6] or no movement capabilities at all [11].For AUVs to explore an underwater shipwreck or cavern,motion control in 3 dimensions is required.
Additional attention has been paid to the limitations of tra-ditional radio based wireless sensor network nodes in anaquatic environment [5]. An optical communication systemprovides an alternative communication path, but there arelimitations due to line of site issues[7]. Underwater acous-tic networks provide the most practical networking physicallayer for mobile underwater sensor nodes, though bandwidthis limited so care must be taken in retrieving data from thenetwork [8, 9, 1, 12].
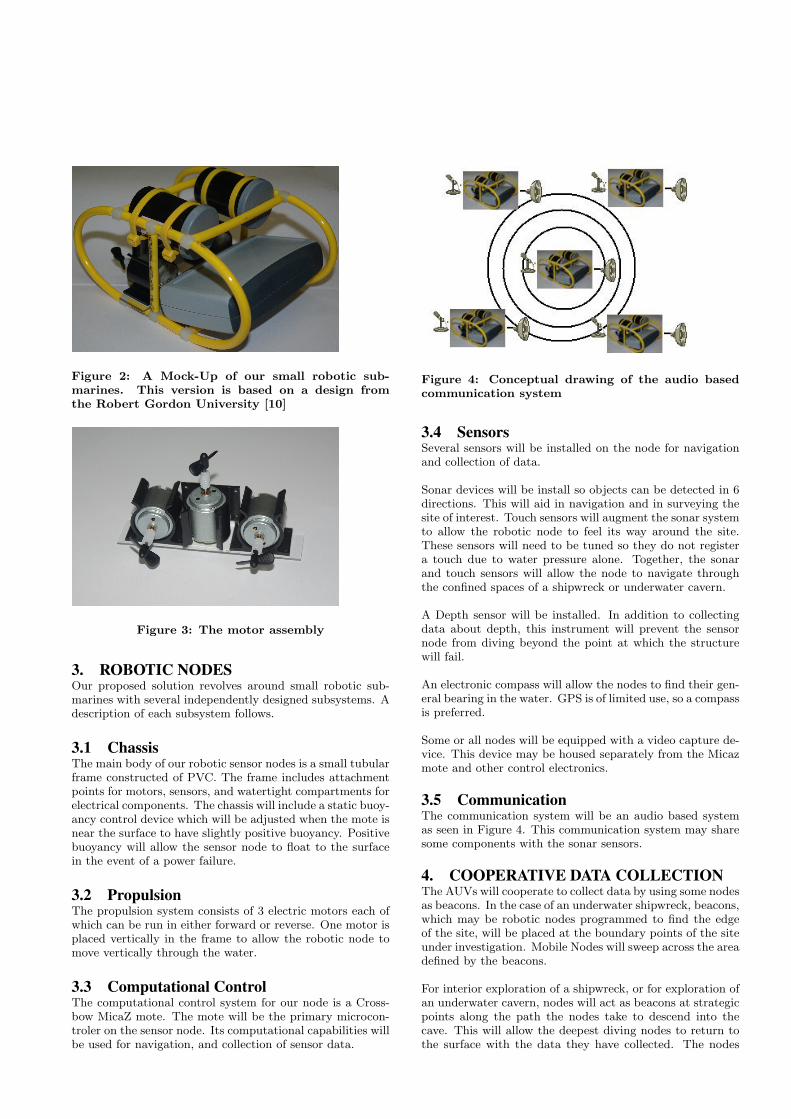
Figure 2: A Mock-Up of our small robotic sub-marines. This version is based on a design fromthe Robert Gordon University [10]
Figure 3: The motor assembly
3. ROBOTIC NODESOur proposed solution revolves around small robotic sub-marines with several independently designed subsystems. Adescription of each subsystem follows.
3.1 ChassisThe main body of our robotic sensor nodes is a small tubularframe constructed of PVC. The frame includes attachmentpoints for motors, sensors, and watertight compartments forelectrical components. The chassis will include a static buoy-ancy control device which will be adjusted when the mote isnear the surface to have slightly positive buoyancy. Positivebuoyancy will allow the sensor node to float to the surfacein the event of a power failure.
3.2 PropulsionThe propulsion system consists of 3 electric motors each ofwhich can be run in either forward or reverse. One motor isplaced vertically in the frame to allow the robotic node tomove vertically through the water.
3.3 Computational ControlThe computational control system for our node is a Cross-bow MicaZ mote. The mote will be the primary microcon-troler on the sensor node. Its computational capabilities willbe used for navigation, and collection of sensor data.
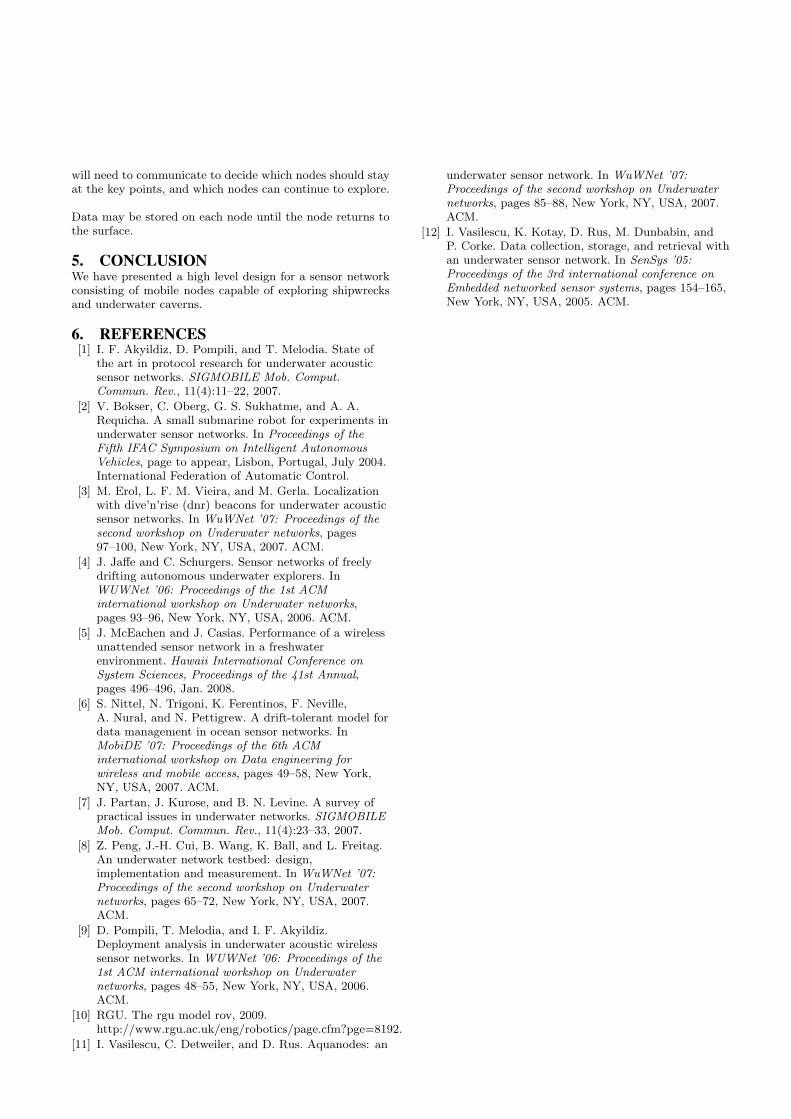
Figure 4: Conceptual drawing of the audio basedcommunication system
3.4 SensorsSeveral sensors will be installed on the node for navigationand collection of data.
Sonar devices will be install so objects can be detected in 6directions. This will aid in navigation and in surveying thesite of interest. Touch sensors will augment the sonar systemto allow the robotic node to feel its way around the site.These sensors will need to be tuned so they do not registera touch due to water pressure alone. Together, the sonarand touch sensors will allow the node to navigate throughthe confined spaces of a shipwreck or underwater cavern.
A Depth sensor will be installed. In addition to collectingdata about depth, this instrument will prevent the sensornode from diving beyond the point at which the structurewill fail.
An electronic compass will allow the nodes to find their gen-eral bearing in the water. GPS is of limited use, so a compassis preferred.
Some or all nodes will be equipped with a video capture de-vice. This device may be housed separately from the Micazmote and other control electronics.
3.5 CommunicationThe communication system will be an audio based systemas seen in Figure 4. This communication system may sharesome components with the sonar sensors.
4. COOPERATIVE DATA COLLECTIONThe AUVs will cooperate to collect data by using some nodesas beacons. In the case of an underwater shipwreck, beacons,which may be robotic nodes programmed to find the edgeof the site, will be placed at the boundary points of the siteunder investigation. Mobile Nodes will sweep across the areadefined by the beacons.
For interior exploration of a shipwreck, or for exploration ofan underwater cavern, nodes will act as beacons at strategicpoints along the path the nodes take to descend into thecave. This will allow the deepest diving nodes to return tothe surface with the data they have collected. The nodes
will need to communicate to decide which nodes should stayat the key points, and which nodes can continue to explore.
Data may be stored on each node until the node returns tothe surface.
5. CONCLUSIONWe have presented a high level design for a sensor networkconsisting of mobile nodes capable of exploring shipwrecksand underwater caverns.
6. REFERENCES[1] I. F. Akyildiz, D. Pompili, and T. Melodia. State of
the art in protocol research for underwater acousticsensor networks. SIGMOBILE Mob. Comput.Commun. Rev., 11(4):11–22, 2007.
[2] V. Bokser, C. Oberg, G. S. Sukhatme, and A. A.Requicha. A small submarine robot for experiments inunderwater sensor networks. In Proceedings of theFifth IFAC Symposium on Intelligent AutonomousVehicles, page to appear, Lisbon, Portugal, July 2004.International Federation of Automatic Control.
[3] M. Erol, L. F. M. Vieira, and M. Gerla. Localizationwith dive’n’rise (dnr) beacons for underwater acousticsensor networks. In WuWNet ’07: Proceedings of thesecond workshop on Underwater networks, pages97–100, New York, NY, USA, 2007. ACM.
[4] J. Jaffe and C. Schurgers. Sensor networks of freelydrifting autonomous underwater explorers. InWUWNet ’06: Proceedings of the 1st ACMinternational workshop on Underwater networks,pages 93–96, New York, NY, USA, 2006. ACM.
[5] J. McEachen and J. Casias. Performance of a wirelessunattended sensor network in a freshwaterenvironment. Hawaii International Conference onSystem Sciences, Proceedings of the 41st Annual,pages 496–496, Jan. 2008.
[6] S. Nittel, N. Trigoni, K. Ferentinos, F. Neville,A. Nural, and N. Pettigrew. A drift-tolerant model fordata management in ocean sensor networks. InMobiDE ’07: Proceedings of the 6th ACMinternational workshop on Data engineering forwireless and mobile access, pages 49–58, New York,NY, USA, 2007. ACM.
[7] J. Partan, J. Kurose, and B. N. Levine. A survey ofpractical issues in underwater networks. SIGMOBILEMob. Comput. Commun. Rev., 11(4):23–33, 2007.
[8] Z. Peng, J.-H. Cui, B. Wang, K. Ball, and L. Freitag.An underwater network testbed: design,implementation and measurement. In WuWNet ’07:Proceedings of the second workshop on Underwaternetworks, pages 65–72, New York, NY, USA, 2007.ACM.
[9] D. Pompili, T. Melodia, and I. F. Akyildiz.Deployment analysis in underwater acoustic wirelesssensor networks. In WUWNet ’06: Proceedings of the1st ACM international workshop on Underwaternetworks, pages 48–55, New York, NY, USA, 2006.ACM.
[10] RGU. The rgu model rov, 2009.http://www.rgu.ac.uk/eng/robotics/page.cfm?pge=8192.
[11] I. Vasilescu, C. Detweiler, and D. Rus. Aquanodes: an
underwater sensor network. In WuWNet ’07:Proceedings of the second workshop on Underwaternetworks, pages 85–88, New York, NY, USA, 2007.ACM.
[12] I. Vasilescu, K. Kotay, D. Rus, M. Dunbabin, andP. Corke. Data collection, storage, and retrieval withan underwater sensor network. In SenSys ’05:Proceedings of the 3rd international conference onEmbedded networked sensor systems, pages 154–165,New York, NY, USA, 2005. ACM.