automatic electropolishing of cobalt chromium dental … · automatic electropolishing of cobalt...
TRANSCRIPT

Automatic electropolishingof cobalt chromium dental castalloys with a fuzzy logic controller
�
Hartmut Surmann and Jorg Huser
GermanNationalResearchCenterfor InformationTechnology,53754St. Augustin,Germany,Tel: 0049/2241/14-2518,Fax: -2342E-mail: [email protected]
Abstract – Cavities and ageing leadsto a higher demand for robust and durable dentures. Cobalt chromiumdental cast alloys fulfill theserequirements. After the casting, the alloys have to be thoroughly cleanedin anelectrochemicaldissolution bath. In the existing technologyan expert has to control the polishing process.Inthis paper we presenta fuzzy logic controller with 16 fuzzy rules, which completely automatize the polishingprocessof cobalt chromium cast alloys. The user has to only put the untr eated cast alloys in the polishingmachineand pressthe start button. Our experimentshave shown, that the tr eateddentureshave a consistent,very high quality during the service life of the electrolyte. Furthermor e, the exchangepoint of the electrolyte isalsoautomatically determined. Theproposedstrategycanbeextendedto other polishingprocesseswith differ entcastalloys or electrolyte concentrations.
Keywords: fuzzycontrol,fuzzyrules,electrochemicalpolishing,electrochemicalmachining,electrolyticbrightening,anodicdissolution,cobaltchromiumdentures,electrolytestate.
Intr oduction
Electrochemicalmetal removal (ECMR) is the generalnamefor a numberof metalworking processesusedfordissolvingmetalfrom workpiecesurfacesin placeof theconventionalmachiningoperations[Burk91]. A specialfield of applicationECMR is theelectrochemicaldissolu-tion of dentureconstructs.Suchartificial teethareusedto bridgegapswhich arecausedby cavities or ageing.Toallow food intake without difficulty, thedentureshave tobe very smoothandshiny. The first productionstepre-quiresa perfectcastedconstruct.Theseconstructs(den-tures)consistof a very roughcobaltchromiumalloy thathasto bethoroughlycleanedandpolished.However, thedenturescannotbesufficiently polishedmechanicallybe-causeof their shapeand roughness.So, electrochemi-cal polishingusinglow concentratedsulphuricacidasanelectrolyteis oneadequatehandlingmethod[Sieg68] topolish the surfaceof the denturecastalloys. The maincharacteristicsare definedin the Germanguiding rulesVDI 3401,page2 [VR72].
Thestateof theart requiresmanualcontrolof theseex-tremely nonlinearpolishing processes.The userhastoadjustspecificparametersfor eachdenture’s shape,sizeand number, which vary with the environment, (eg thetemperatureor thestateof theelectrolyte.Thevarietyof�
Publishedin: Journal of Computers& Chemical Engineering,Voloume.22,No.7-8,pp. 1099-1111on17June1998
Figure1: Cobaltchromiumdenture
the marginal conditionsand the nonlineardependenciesof theparametersis thereasonfor amissingmathematicalmodelaswell asthe absencesof an automaticpolishingprocess.It wasshown in acoupleof experiments,thatthepolishing result variesfor the sameuser. Nevertheless,the userhassomevagueandimpreciserulesfor the de-pendenciesof thepolishingparameters.Thedifficulty incompiling the control know-how is dueto the nonlinear,time varyingbehaviour of the systemandthe poor qual-ity of the availablemeasurements.Fuzzycontrol seemsto be a possibility to incorporatetheserules and to im-
1
3a
a
S a3
S
S
w22
3N
N
a
2
1
1
w 3PT’
2PT’N
1
a
aw
1
0
medium1
0
1
0
small1
0
COG
1
1
1
1
0
1
0
1
two
two
twolarge
Rule 2:
Rule 1:
0.20.55
0.550.65
0.55
0 2
0 2
0 2 4
4
4 0 sec 2000 sec
0 sec 2000 sec
0 sec 2000 sec
Combined inference results.
0 sec 2000 sec
0 A 5 A 10 A
0 A 5 A 10 A
0 A 5 A 10 A
Rule 3:
high
small
medium
Inference
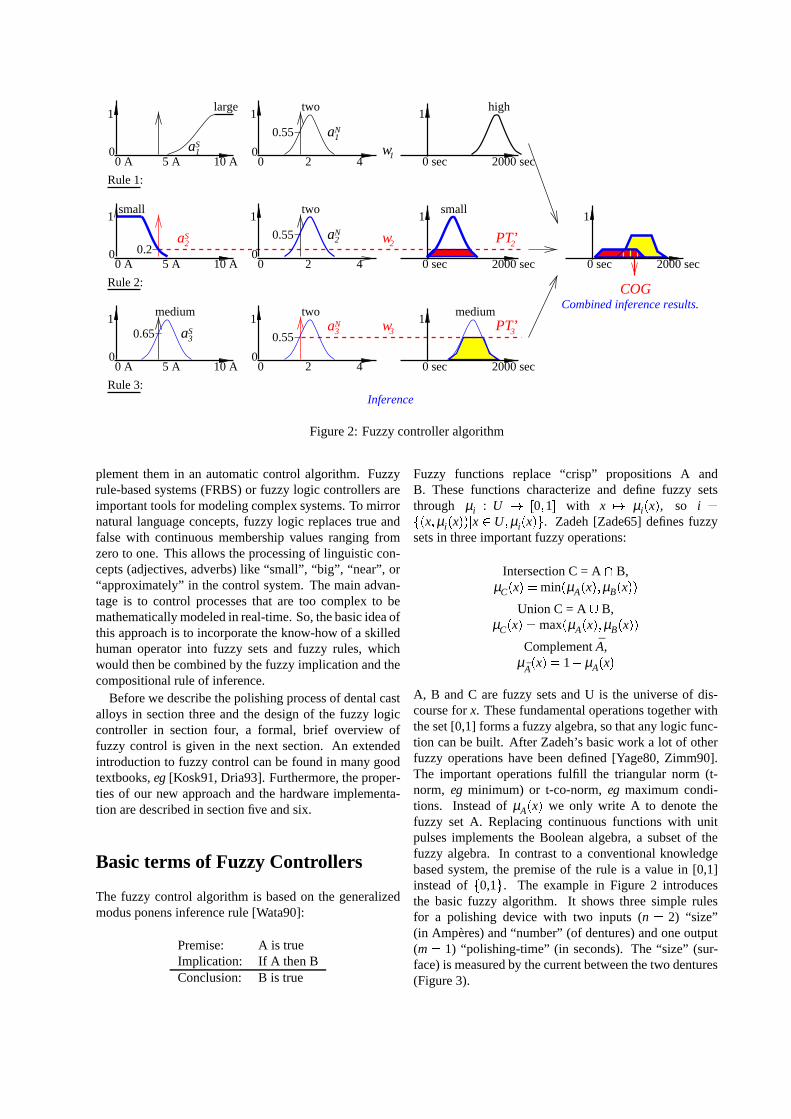
Figure2: Fuzzycontrolleralgorithm
plementthemin an automaticcontrol algorithm. Fuzzyrule-basedsystems(FRBS)or fuzzy logic controllersareimportanttoolsfor modelingcomplex systems.To mirrornaturallanguageconcepts,fuzzy logic replacestrue andfalsewith continuousmembershipvaluesranging fromzeroto one.This allows theprocessingof linguistic con-cepts(adjectives,adverbs)like “small”, “big”, “near”, or“approximately”in thecontrol system.Themainadvan-tage is to control processesthat are too complex to bemathematicallymodeledin real-time.So,thebasicideaofthis approachis to incorporatetheknow-how of a skilledhumanoperatorinto fuzzy setsand fuzzy rules, whichwould thenbecombinedby thefuzzy implicationandthecompositionalrule of inference.
Beforewe describethepolishingprocessof dentalcastalloys in sectionthreeand the designof the fuzzy logiccontroller in section four, a formal, brief overview offuzzy control is given in the next section. An extendedintroductionto fuzzy controlcanbe foundin many goodtextbooks,eg [Kosk91, Dria93]. Furthermore,theproper-ties of our new approachandthe hardwareimplementa-tion aredescribedin sectionfiveandsix.
Basicterms of FuzzyControllers
The fuzzy control algorithmis basedon the generalizedmodusponensinferencerule [Wata90]:
Premise: A is trueImplication: If A thenBConclusion: B is true
Fuzzy functions replace “crisp” propositions A andB. Thesefunctions characterizeand define fuzzy setsthrough µi : U � �
0 � 1� with x �� µi � x� , so i � x � µi � x��� � x � U � µi � x��� . Zadeh[Zade65] definesfuzzysetsin threeimportantfuzzyoperations:
IntersectionC = A � B,µC � x�� min � µA � x��� µB � x���
UnionC = A � B,µC � x�� max� µA � x��� µB � x���
ComplementA,µ
A � x�� 1 � µA � x�A, B andC are fuzzy setsandU is the universeof dis-coursefor x. Thesefundamentaloperationstogetherwiththeset[0,1] formsa fuzzyalgebra,sothatany logic func-tion canbebuilt. After Zadeh’s basicwork a lot of otherfuzzy operationshave beendefined[Yage80, Zimm90].The important operationsfulfill the triangular norm (t-norm, eg minimum) or t-co-norm,eg maximumcondi-tions. Insteadof µA � x� we only write A to denotethefuzzy set A. Replacingcontinuousfunctions with unitpulsesimplementsthe Booleanalgebra,a subsetof thefuzzy algebra. In contrastto a conventionalknowledgebasedsystem,the premiseof the rule is a valuein [0,1]insteadof
0,1� . The example in Figure 2 introduces
the basic fuzzy algorithm. It shows threesimple rulesfor a polishing device with two inputs (n 2) “size”(in Amperes)and“number” (of dentures)andoneoutput(m 1) “polishing-time” (in seconds).The “size” (sur-face)is measuredby thecurrentbetweenthetwo dentures(Figure3).

R1: IF sizeis largeAND numberis twoTHEN polishing-timeis high
R2: IF sizeis smallAND numberis twoTHEN polishing-timeis small
R3: IF sizeis mediumAND numberis twoTHEN polishing-timeis medium
The input valuesof thevariables“size” and“number”are simultaneouslyswitchedto all the rules to be com-paredwith the storedpremises(IF parts). Now the truthvaluesαsize
i , αnumberi for everysub-premisearecalculated
by:
αsizei µAi � size� � f or Ai � small � med���
αnumberi µBi � number��� f or Bi � one� two�� f or i 1 ����� 3
(1)αsize
2 0 � 2 and αnumber2 0 � 55 in rule 2 generatesa
rule matchingor truth value of ω2 0 � 2, becausethefuzzy logic conjunction“AND” is interpretedasthemin-imum of αsize
i and αnumberi (ωi min � αsize
i � αnumberi � ).
αsize1 0 � 0 indicatesthat the input doesnot matchwith
the storedsub-premiseat all, which leadsto a completenon-contribution of rule 1 to the output. The conclusionof eachrule is
PT �i min � ωi � PTi � x����� x � PTi ��� for i 1 ����� 3 (2)
andrepresentsthe conclusion(THEN part) of eachrule.ThefuzzyresultfunctionPT � is theunificationof all sub-resultsPT �i andis calculatedby:
PT � �� PT �i � for i 1 ����� 31 � (3)
In mostapplicationstheoutputvaluesare“crisp” numbers(unit pulses),which areaccomplishedby calculatingthecenterof gravity (COG) of the resultingfuzzy functionPT � :
COGPT ! x " PT � � x� dx
PT � � x� dx(4)
The describedFRBS with binary input and output val-uesis called BIOFAM (Binary Input-OutputFuzzy As-sociativeMemory)[Kosk91] or theMIN-MAX algorithm[Mamd74] with theCOGusedasdefuzzificationmethod.
Thecalculationof thefuzzyresultfunctionPT � andthecenterof gravity is thebottleneckduringthecomputationof thefuzzyalgorithm.Therefore,a modifiedresultfunc-tion calculation(FCOG)[Infr90, Surm95b] is suggested,in which thecenterof areaMi andtheareaAi of a mem-bershipfunctionarecalculatedbeforerun time (l = num-berof outputmembershipfunctions):
Ai PT � � x� dx � Mi x " PT � � x� dx
COGPT l∑
i # 1ωi $ Mi
l∑
i # 1ωi $ Ai
(5)
1compositionalruleof inference[Mamd74]
A fuzzy controller with multiple inputs and one outputis called a MISO fuzzy controller. Each multiple in-put/multipleoutput(MIMO) fuzzy controllerwith m out-put variablesis a unificationof severalMISO controllers.MIMO describesa partial, n-dimensional,nonlinearanddynamicfreefunction f : U % IRn � IRm becausetheI/Obehaviour of the FRBS dependsonly on the currentin-put vectorand the algorithm hasno storingor delayingelements.
More mathematicallythe 6-tuple FRB = � µab,R,T,I ,T � CO,DEF � is a family of fuzzycontrollers(FC)withthe membershipfunctionsµ , the fuzzy rule baseR, thet-norm fuzzy conjunctionT, the implication I verifyingI � a � 0�� 0 i f a & 0 (eg a R-implicationor t-norm), thet-co-normT-CO andthedefuzzificationmethodDEF (egcenterof gravity, maximumor FCOG).Themainparam-etersfor theFRBSarethenumberof fuzzyrulesk andtheposition(a) andwidths(b) of the input andoutputmem-bershipfunctions.Of primeimportanceis thatFC � FRBis a universalapproximator.
THEOREM 1 (Universalapproximator) Let FRB bethe setof all FC and f : U % IRn � IR be a continuousfunctiondefinedona compactU. For each ε ' 0 thereex-istsa FCε � FRBsuch thatsup
� f �)(x�*� FCε �+(x���,� (x � U �.- ε.
Castro[Cast93] providesthe proof. Clearly, from a the-oretical viewpoint a fuzzy controller performsthe sameactionsasotheruniversalapproaches.Theimportantpartis, thatthefuzzyrule-basedapproachis ahighlevel, sym-bolic modelingtechnique.Sincethefuzzy rulesresemblemuchmorecloselythewayhumansexplaingeneralrules,the fuzzy controlleralgorithmeasilydefinesthe functionf .
Electropolishingof cobaltchromium dental plate castalloys
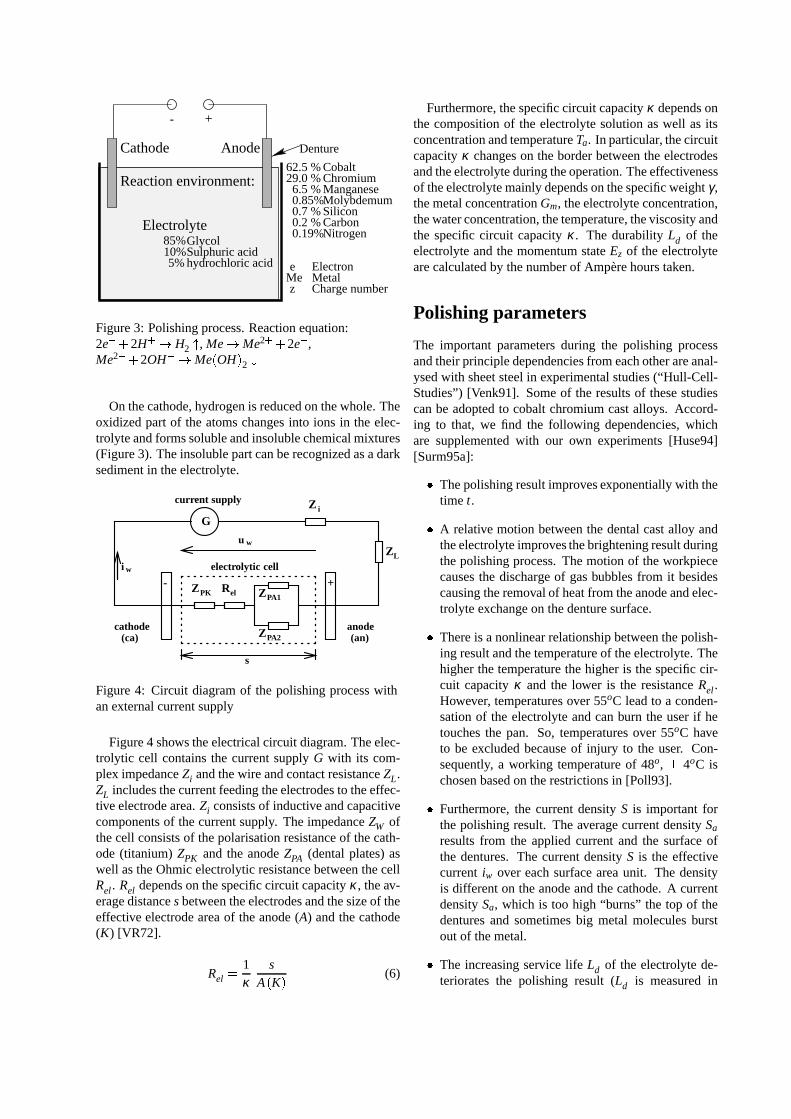
During electropolishing,a power supply unit forcesanelectricchargeandmaterialexchange(ions)betweenthedentalplate(anode)andmetaniumsheet(cathode).Theions migrate towards conductingelectrodesthrough anelectrolyte(low concentratedsulphuricacid). The reac-tion environmentis shown in Figure3. In what follows,a simplifieddescriptionof this electrochemicalprocedureis given.
Applying a voltage resultsin a charge exchangebe-tweenthecathodeandtheanodein which theworkpiecegetsoxidized [VR72]. Furthermore,molecularoxygenariseson the positive electrode.The oxygenrecombina-tion is exothermal,that meansa part of the supplieden-ergy is convertedinto heatand the electrolyteheatsupduringpolishing.
5%Sulphuric acidhydrochloric acid
10%Glycol85%
MolybdemumManganese
Charge number
Chromium
Electrolyte
+-
Cathode Anode
NitrogenCarbonSilicon
29.0 % 6.5 % 0.85% 0.7 % 0.2 % 0.19%
62.5 %Cobalt
Metale
Denture
zMe
Electron
Reaction environment:
Figure3: Polishingprocess.Reactionequation:2e/10 2H 23� H2 4 , Me � Me2250 2e/ ,Me2260 2OH /7� Me� OH � 2 8
Onthecathode,hydrogenis reducedonthewhole.Theoxidizedpart of the atomschangesinto ions in the elec-trolyteandformssolubleandinsolublechemicalmixtures(Figure3). Theinsolublepartcanberecognizedasadarksedimentin theelectrolyte.
i w
G
R
s
elPA1
PA2
L
i
w
Z
Z
Z Z
Z
PK
u
- +
current supply
cathode anode(ca) (an)
electrolytic cell
Figure4: Circuit diagramof the polishingprocesswithanexternalcurrentsupply
Figure4 showstheelectricalcircuit diagram.Theelec-trolytic cell containsthe currentsupplyG with its com-plex impedanceZi andthewire andcontactresistanceZL.ZL includesthecurrentfeedingtheelectrodesto theeffec-tiveelectrodearea.Zi consistsof inductiveandcapacitivecomponentsof thecurrentsupply. TheimpedanceZW ofthecell consistsof thepolarisationresistanceof thecath-ode(titanium) ZPK and the anodeZPA (dentalplates)aswell astheOhmicelectrolyticresistancebetweenthecellRel. Rel dependsonthespecificcircuit capacityκ , theav-eragedistancesbetweentheelectrodesandthesizeof theeffective electrodeareaof theanode(A) andthecathode(K) [VR72].
Rel 1κ
sA � K � (6)
Furthermore,thespecificcircuit capacityκ dependsonthe compositionof the electrolytesolutionaswell asitsconcentrationandtemperatureTa. In particular, thecircuitcapacityκ changeson theborderbetweentheelectrodesandtheelectrolyteduringtheoperation.Theeffectivenessof theelectrolytemainlydependsonthespecificweightγ,themetalconcentrationGm, theelectrolyteconcentration,thewaterconcentration,thetemperature,theviscosityandthe specificcircuit capacityκ . The durability Ld of theelectrolyteandthe momentumstateEz of the electrolytearecalculatedby thenumberof Amperehourstaken.
Polishing parameters
The important parametersduring the polishing processandtheirprincipledependenciesfrom eachotherareanal-ysedwith sheetsteelin experimentalstudies(“Hull-Cell-Studies”)[Venk91]. Someof the resultsof thesestudiescanbe adoptedto cobaltchromiumcastalloys. Accord-ing to that, we find the following dependencies,whichare supplementedwith our own experiments[Huse94][Surm95a]:
9 Thepolishingresultimprovesexponentiallywith thetime t.
9 A relative motion betweenthe dentalcastalloy andtheelectrolyteimprovesthebrighteningresultduringthepolishingprocess.Themotionof theworkpiececausesthe discharge of gasbubblesfrom it besidescausingtheremovalof heatfrom theanodeandelec-trolyte exchangeon thedenturesurface.
9 Thereis anonlinearrelationshipbetweenthepolish-ing resultandthetemperatureof theelectrolyte.Thehigherthetemperaturethehigheris thespecificcir-cuit capacityκ and the lower is the resistanceRel.However, temperaturesover 55oC leadto a conden-sationof the electrolyteandcanburn the userif hetouchesthe pan. So, temperaturesover 55oC haveto be excludedbecauseof injury to the user. Con-sequently, a working temperatureof 48o, : 4oC ischosenbasedon therestrictionsin [Poll93].
9 Furthermore,the currentdensityS is importantforthe polishingresult. The averagecurrentdensitySa
resultsfrom the appliedcurrentand the surfaceofthe dentures.The currentdensityS is the effectivecurrent iw over eachsurfaceareaunit. The densityis differenton theanodeandthecathode.A currentdensitySa, which is too high “burns” the top of thedenturesand sometimesbig metal moleculesburstout of themetal.
9 The increasingservicelife Ld of the electrolytede-terioratesthe polishing result (Ld is measuredin
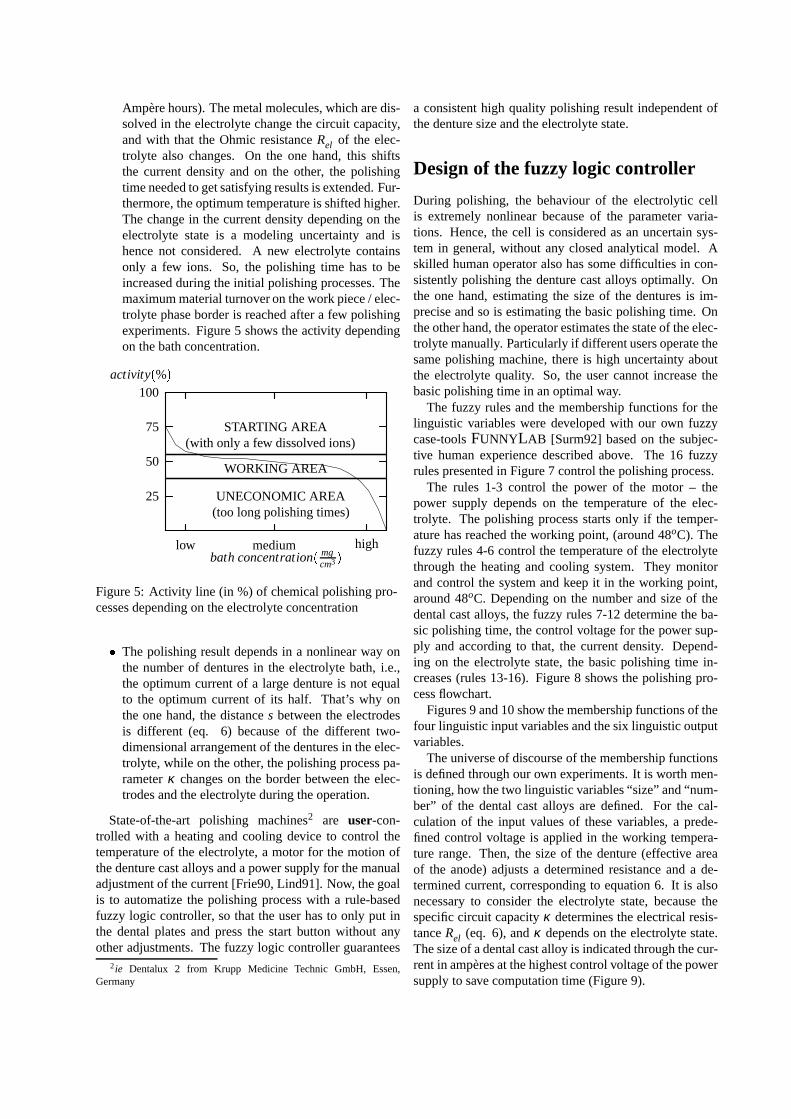
Amperehours).Themetalmolecules,whicharedis-solved in theelectrolytechangethecircuit capacity,andwith that the Ohmic resistanceRel of the elec-trolyte also changes. On the one hand, this shiftsthe currentdensityand on the other, the polishingtimeneededto getsatisfyingresultsis extended.Fur-thermore,theoptimumtemperatureis shiftedhigher.The changein the currentdensitydependingon theelectrolyte state is a modeling uncertaintyand ishencenot considered. A new electrolytecontainsonly a few ions. So, the polishing time hasto beincreasedduringtheinitial polishingprocesses.Themaximummaterialturnoveronthework piece/ elec-trolyte phaseborderis reachedaftera few polishingexperiments.Figure5 shows theactivity dependingon thebathconcentration.
25
50
75
100
low medium high
activity � %�
bath concentration � mgcm3 �
STARTING AREA(with only a few dissolvedions)
WORKING AREA
UNECONOMICAREA(too longpolishingtimes)
Figure5: Activity line (in %) of chemicalpolishingpro-cessesdependingon theelectrolyteconcentration
9 The polishingresultdependsin a nonlinearway onthe numberof denturesin the electrolytebath, i.e.,the optimumcurrentof a large dentureis not equalto the optimum currentof its half. That’s why onthe onehand,the distances betweenthe electrodesis different (eq. 6) becauseof the different two-dimensionalarrangementof thedenturesin theelec-trolyte, while on theother, thepolishingprocesspa-rameterκ changeson the borderbetweenthe elec-trodesandtheelectrolyteduringtheoperation.
State-of-the-artpolishing machines2 are user-con-trolled with a heatingandcooling device to control thetemperatureof the electrolyte,a motor for the motion ofthedenturecastalloysandapowersupplyfor themanualadjustmentof thecurrent[Frie90, Lind91]. Now, thegoalis to automatizethe polishingprocesswith a rule-basedfuzzy logic controller, so that the userhasto only put inthe dentalplatesand pressthe start button without anyotheradjustments.The fuzzy logic controllerguarantees
2ie Dentalux 2 from Krupp Medicine Technic GmbH, Essen,Germany
a consistenthigh quality polishingresult independentofthedenturesizeandtheelectrolytestate.
Designof the fuzzy logic controller
During polishing, the behaviour of the electrolytic cellis extremely nonlinearbecauseof the parametervaria-tions. Hence,the cell is consideredasan uncertainsys-tem in general,without any closedanalyticalmodel. Askilled humanoperatoralsohassomedifficulties in con-sistentlypolishingthe denturecastalloys optimally. Onthe onehand,estimatingthe sizeof the denturesis im-preciseandso is estimatingthebasicpolishingtime. Ontheotherhand,theoperatorestimatesthestateof theelec-trolytemanually. Particularlyif differentusersoperatethesamepolishingmachine,thereis high uncertaintyaboutthe electrolytequality. So, the usercannotincreasethebasicpolishingtime in anoptimalway.
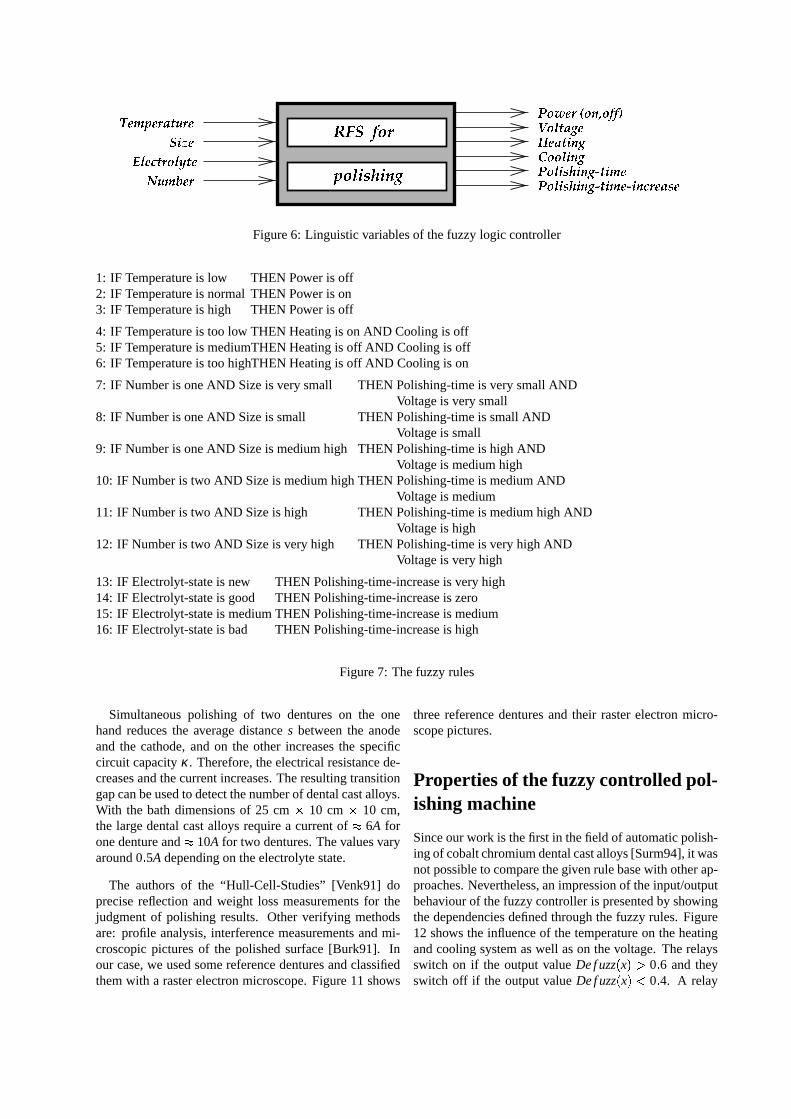
The fuzzy rulesandthe membershipfunctionsfor thelinguistic variableswere developedwith our own fuzzycase-toolsFUNNYLAB [Surm92] basedon the subjec-tive humanexperiencedescribedabove. The 16 fuzzyrulespresentedin Figure7 controlthepolishingprocess.
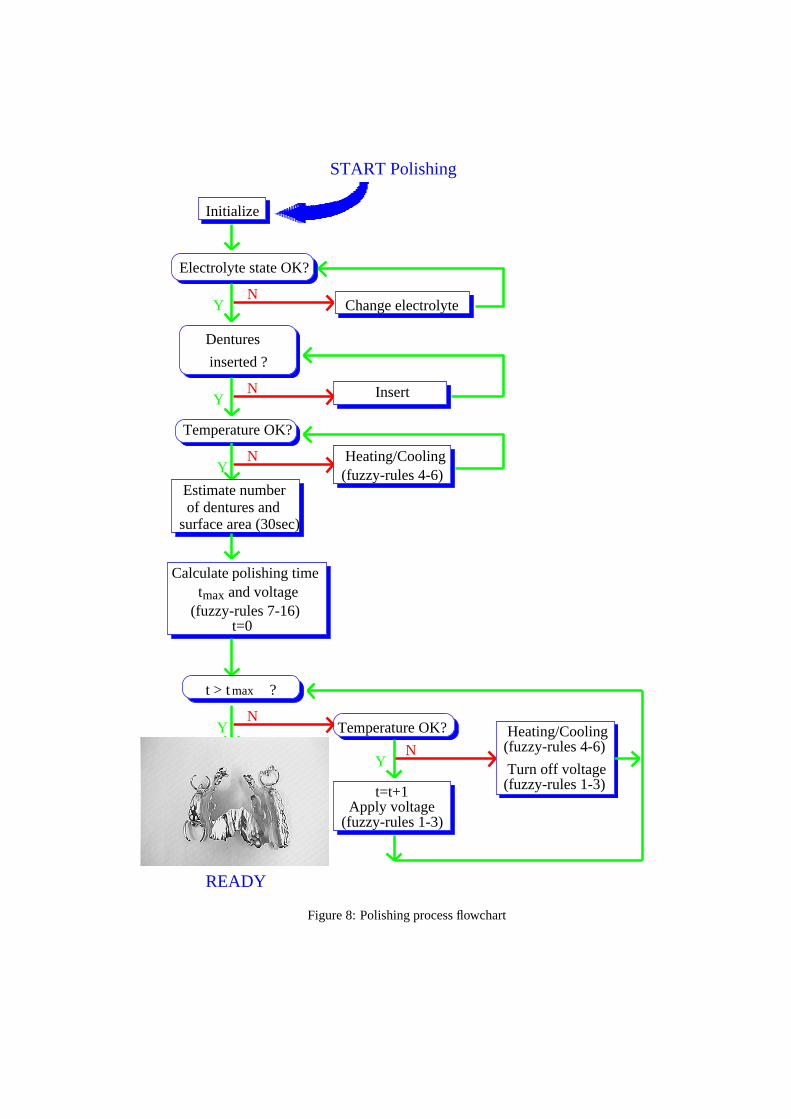
The rules 1-3 control the power of the motor – thepower supply dependson the temperatureof the elec-trolyte. The polishingprocessstartsonly if the temper-aturehasreachedtheworking point, (around48oC). Thefuzzy rules4-6 control the temperatureof theelectrolytethroughthe heatingand cooling system. They monitorandcontrol the systemandkeepit in the working point,around48oC. Dependingon the numberandsizeof thedentalcastalloys, thefuzzy rules7-12determinetheba-sic polishingtime, thecontrolvoltagefor thepower sup-ply andaccordingto that, the currentdensity. Depend-ing on the electrolytestate,the basicpolishing time in-creases(rules13-16). Figure8 shows the polishingpro-cessflowchart.
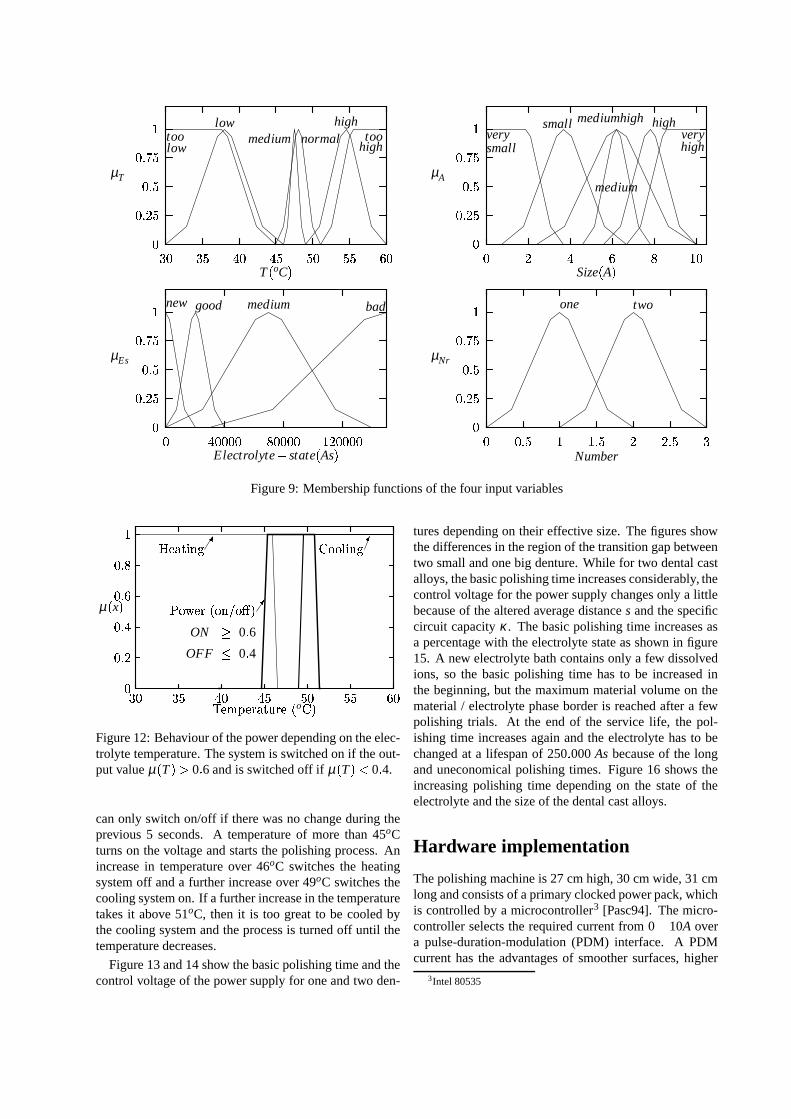
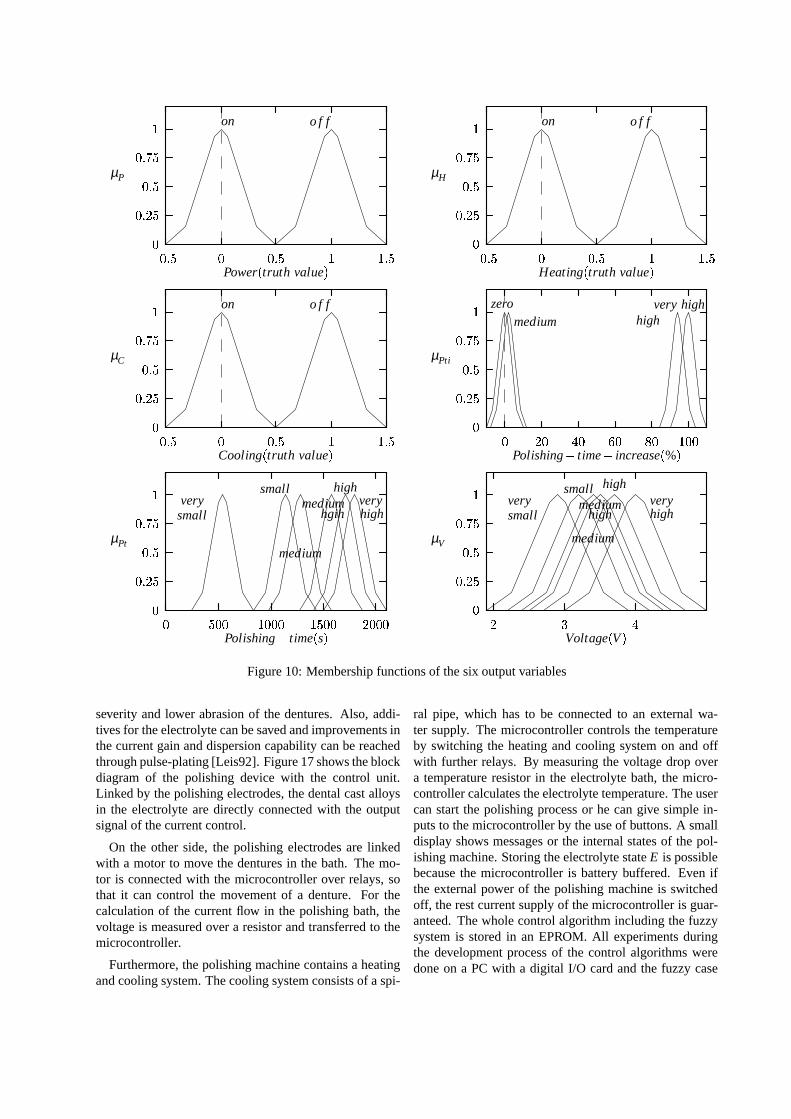
Figures9 and10show themembershipfunctionsof thefour linguistic inputvariablesandthesix linguisticoutputvariables.
Theuniverseof discourseof themembershipfunctionsis definedthroughour own experiments.It is worth men-tioning,how thetwo linguisticvariables“size” and“num-ber” of the dentalcastalloys are defined. For the cal-culation of the input valuesof thesevariables,a prede-fined control voltageis appliedin the working tempera-ture range. Then, the sizeof the denture(effective areaof the anode)adjustsa determinedresistanceand a de-terminedcurrent,correspondingto equation6. It is alsonecessaryto considerthe electrolytestate,becausethespecificcircuit capacityκ determinestheelectricalresis-tanceRel (eq. 6), andκ dependson the electrolytestate.Thesizeof adentalcastalloy is indicatedthroughthecur-rentin amperesat thehighestcontrolvoltageof thepowersupplyto savecomputationtime (Figure9).
;=<6>@?BADCE AGF�H�IKJGH�LNM
OQPSRUT�VXWZY[6Y V\T�]_^`Wa P\PSRU]+^XWb6c\d3efY g
h ]_ijYkNYld1mSYlg�VKT�c\g�Y
n�PSRU]_o p\]_^`WZq�T�]_drY q�]_^\s g�YlVKolYn�PSRU]_o p\]_^`WZq�T�]_drY
n�PKtrYlgSu_PK^`v_P�w_wjxyGR�YlslT�g�PSRUz\T�Y
Figure6: Linguistic variablesof thefuzzy logic controller
1: IF Temperatureis low THEN Power is off2: IF Temperatureis normal THEN Power is on3: IF Temperatureis high THEN Power is off
4: IF Temperatureis too low THEN Heatingis on AND Coolingis off5: IF Temperatureis mediumTHEN Heatingis off AND Coolingis off6: IF Temperatureis too highTHEN Heatingis off AND Coolingis on
7: IF Numberis oneAND Sizeis verysmall THEN Polishing-timeis very smallANDVoltageis verysmall
8: IF Numberis oneAND Sizeis small THEN Polishing-timeis smallANDVoltageis small
9: IF Numberis oneAND Sizeis mediumhigh THEN Polishing-timeis high ANDVoltageis mediumhigh
10: IF Numberis two AND Sizeis mediumhighTHEN Polishing-timeis mediumANDVoltageis medium
11: IF Numberis two AND Sizeis high THEN Polishing-timeis mediumhigh ANDVoltageis high
12: IF Numberis two AND Sizeis veryhigh THEN Polishing-timeis very highANDVoltageis veryhigh
13: IF Electrolyt-stateis new THEN Polishing-time-increaseis veryhigh14: IF Electrolyt-stateis good THEN Polishing-time-increaseis zero15: IF Electrolyt-stateis mediumTHEN Polishing-time-increaseis medium16: IF Electrolyt-stateis bad THEN Polishing-time-increaseis high
Figure7: Thefuzzy rules
Simultaneouspolishing of two dentureson the onehandreducesthe averagedistances betweenthe anodeand the cathode,andon the other increasesthe specificcircuit capacityκ . Therefore,theelectricalresistancede-creasesandthecurrentincreases.Theresultingtransitiongapcanbeusedto detectthenumberof dentalcastalloys.With the bathdimensionsof 25 cm " 10 cm " 10 cm,the largedentalcastalloys requirea currentof { 6A foronedentureand { 10A for two dentures.Thevaluesvaryaround0 � 5A dependingon theelectrolytestate.
The authorsof the “Hull-Cell-Studies” [Venk91] doprecisereflectionandweight lossmeasurementsfor thejudgmentof polishing results. Otherverifying methodsare: profile analysis,interferencemeasurementsandmi-croscopicpicturesof the polishedsurface[Burk91]. Inour case,we usedsomereferencedenturesandclassifiedthemwith a rasterelectronmicroscope.Figure11 shows
threereferencedenturesand their rasterelectronmicro-scopepictures.
Propertiesof the fuzzy controlled pol-ishing machine
Sinceourwork is thefirst in thefield of automaticpolish-ingof cobaltchromiumdentalcastalloys[Surm94], it wasnotpossibleto comparethegivenrulebasewith otherap-proaches.Nevertheless,animpressionof theinput/outputbehaviour of thefuzzycontrolleris presentedby showingthedependenciesdefinedthroughthefuzzy rules. Figure12 shows the influenceof the temperatureon theheatingandcoolingsystemaswell ason thevoltage.Therelaysswitch on if the outputvalueDef uzz� x�|' 0 � 6 and theyswitch off if the outputvalueDef uzz� x�D} 0 � 4. A relay
maxt
START Polishing
N
N
N
N
N
READY
Y
Y
Y
Y
Y
Dentures
inserted ?
Insert
Estimate numberof dentures and
surface area (30sec)
t=0
Calculatepolishing timeand voltage
t=t+1Apply voltage
Heating/Cooling
Turn off voltage
Initialize
Electrolyte state OK?
Change electrolyte
Temperature OK?
t > tmax ?
Temperature OK?
Heating/Cooling
(fuzzy-rules 7-16)
(fuzzy-rules 1-3)
(fuzzy-rules 4-6)
(fuzzy-rules 4-6)
(fuzzy-rules 1-3)
Figure8: Polishingprocessflowchart
~~\���j�~\���~\�U���
�
�j~ ��� ��~ ��� ��~ �j� �j~
µT
T � oC �
toolow
lowmedium normal
hightoo
high
~~K� ���~\���~K���j�
�
~ � � � � � ~
µA
Size� A�
verysmall
small
medium
mediumhigh highveryhigh
~~\���j�~\���~\�U���
�
~ ��~�~j~j~ ��~j~�~j~ ���j~j~�~j~
µEs
Electrolyte � state� As�
new good medium bad
~~K� ���~\���~K���j�
�
~ ~\��� � �j��� � ����� �
µNr
Number
one two
Figure9: Membershipfunctionsof thefour inputvariables
~~\���~\� �~\� �~\� ��
�j~ ��� ��~ �f� ��~ �j� �j~
µ � x�
���l�r�Z�l���`���K��� � o � �
��� �`�����K� �G�f��� ���\�
�`¡ �l� � � �Q¢ ��£ �ON ¤ 0 � 6
OFF - 0 � 4
¥ ¥
¦
Figure12: Behaviour of thepowerdependingontheelec-trolyte temperature.Thesystemis switchedon if theout-put valueµ � T �B' 0 � 6 andis switchedoff if µ � T �S} 0 � 4.
canonly switchon/off if therewasno changeduring theprevious 5 seconds. A temperatureof more than 45oCturnson thevoltageandstartsthepolishingprocess.Anincreasein temperatureover 46oC switchesthe heatingsystemoff anda further increaseover 49oC switchesthecoolingsystemon. If afurtherincreasein thetemperaturetakes it above 51oC, thenit is too greatto be cooledbythecoolingsystemandtheprocessis turnedoff until thetemperaturedecreases.
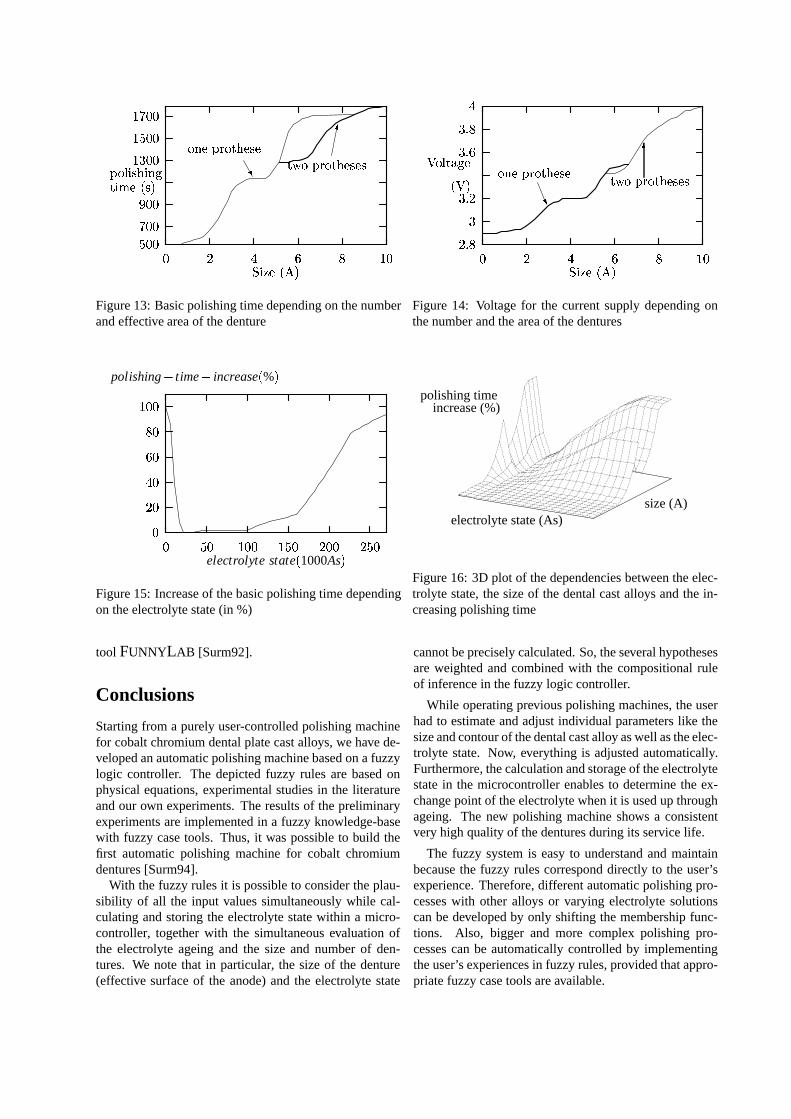
Figure13and14show thebasicpolishingtimeandthecontrolvoltageof thepower supplyfor oneandtwo den-
turesdependingon their effective size. Thefiguresshowthedifferencesin theregionof thetransitiongapbetweentwo smallandonebig denture.While for two dentalcastalloys,thebasicpolishingtimeincreasesconsiderably, thecontrolvoltagefor thepower supplychangesonly a littlebecauseof thealteredaveragedistances andthespecificcircuit capacityκ . Thebasicpolishingtime increasesasa percentagewith theelectrolytestateasshown in figure15. A new electrolytebathcontainsonly a few dissolvedions, so the basicpolishing time hasto be increasedinthe beginning,but the maximummaterialvolumeon thematerial/ electrolytephaseborderis reachedafter a fewpolishing trials. At the endof the servicelife, the pol-ishing time increasesagainandthe electrolytehasto bechangedat a lifespanof 250� 000As becauseof the longanduneconomicalpolishingtimes. Figure16 shows theincreasingpolishing time dependingon the stateof theelectrolyteandthesizeof thedentalcastalloys.
Hardware implementation
Thepolishingmachineis 27 cmhigh,30 cmwide,31 cmlongandconsistsof aprimaryclockedpowerpack,whichis controlledby a microcontroller3 [Pasc94]. Themicro-controllerselectsthe requiredcurrentfrom 0 � 10A overa pulse-duration-modulation(PDM) interface. A PDMcurrenthasthe advantagesof smoothersurfaces,higher
3Intel 80535
~~\���j�~\���~\�U���
�
§ ~K� � ~ ~K� � � ��� �
µP
Power� truth value�
on of f
~~K� ���~\���~K���j�
�
§ ~\��� ~ ~\��� � �j���
µH
Heating � truth value�
on of f
~~\���j�~\���~\�U���
�
§ ~K� � ~ ~K� � � ��� �
µC
Cooling � truth value�
on of f
~~K� ���~\���~K���j�
�
~ �j~ ��~ ��~ ��~ ��~j~
µPti
Polishing � time � increase� %�
zeromedium high
very high
~~\���j�~\���~\�U���
�
~ �j~j~ � ~�~j~ ����~�~ �j~j~j~
µPt
Polishing � time� s�
verysmall
small
medium
mediumhgih
highveryhigh
~~K� ���~\���~K���j�
�
� � �
µV
Voltage� V �
verysmall
small
medium
mediumhigh
highveryhigh
Figure10: Membershipfunctionsof thesix outputvariables
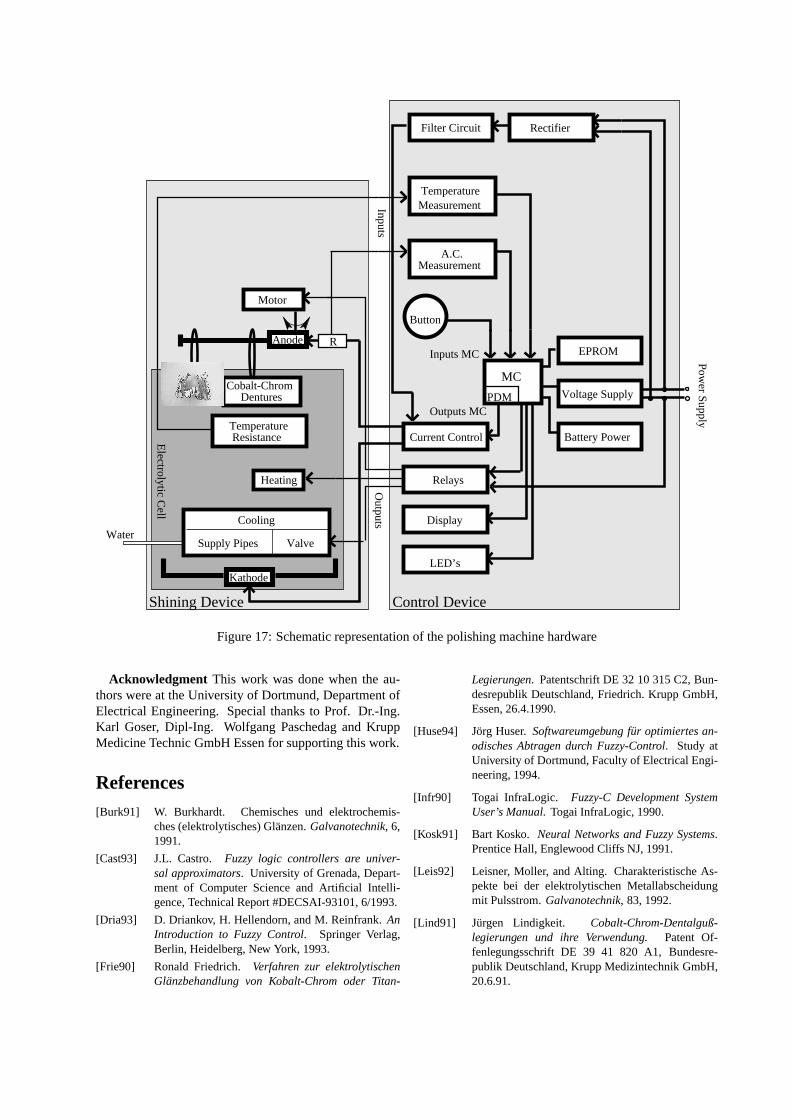
severity andlower abrasionof the dentures.Also, addi-tivesfor theelectrolytecanbesavedandimprovementsinthecurrentgainanddispersioncapabilitycanbereachedthroughpulse-plating[Leis92]. Figure17showstheblockdiagramof the polishing device with the control unit.Linkedby thepolishingelectrodes,thedentalcastalloysin the electrolytearedirectly connectedwith the outputsignalof thecurrentcontrol.
On the otherside, the polishingelectrodesare linkedwith a motor to move the denturesin the bath. The mo-tor is connectedwith the microcontrollerover relays,sothat it can control the movementof a denture. For thecalculationof the currentflow in the polishingbath, thevoltageis measuredover a resistorandtransferredto themicrocontroller.
Furthermore,thepolishingmachinecontainsa heatingandcoolingsystem.Thecoolingsystemconsistsof aspi-
ral pipe, which hasto be connectedto an external wa-ter supply. The microcontrollercontrolsthe temperatureby switching the heatingandcooling systemon andoffwith further relays. By measuringthe voltagedrop overa temperatureresistorin the electrolytebath, the micro-controllercalculatestheelectrolytetemperature.Theusercanstart the polishingprocessor he cangive simplein-putsto themicrocontrollerby theuseof buttons.A smalldisplayshows messagesor the internalstatesof the pol-ishingmachine.StoringtheelectrolytestateE is possiblebecausethe microcontrolleris batterybuffered. Even ifthe externalpower of the polishingmachineis switchedoff, therestcurrentsupplyof themicrocontrolleris guar-anteed.Thewholecontrolalgorithmincluding thefuzzysystemis storedin an EPROM. All experimentsduringthe developmentprocessof the control algorithmsweredoneon a PC with a digital I/O cardandthe fuzzy case
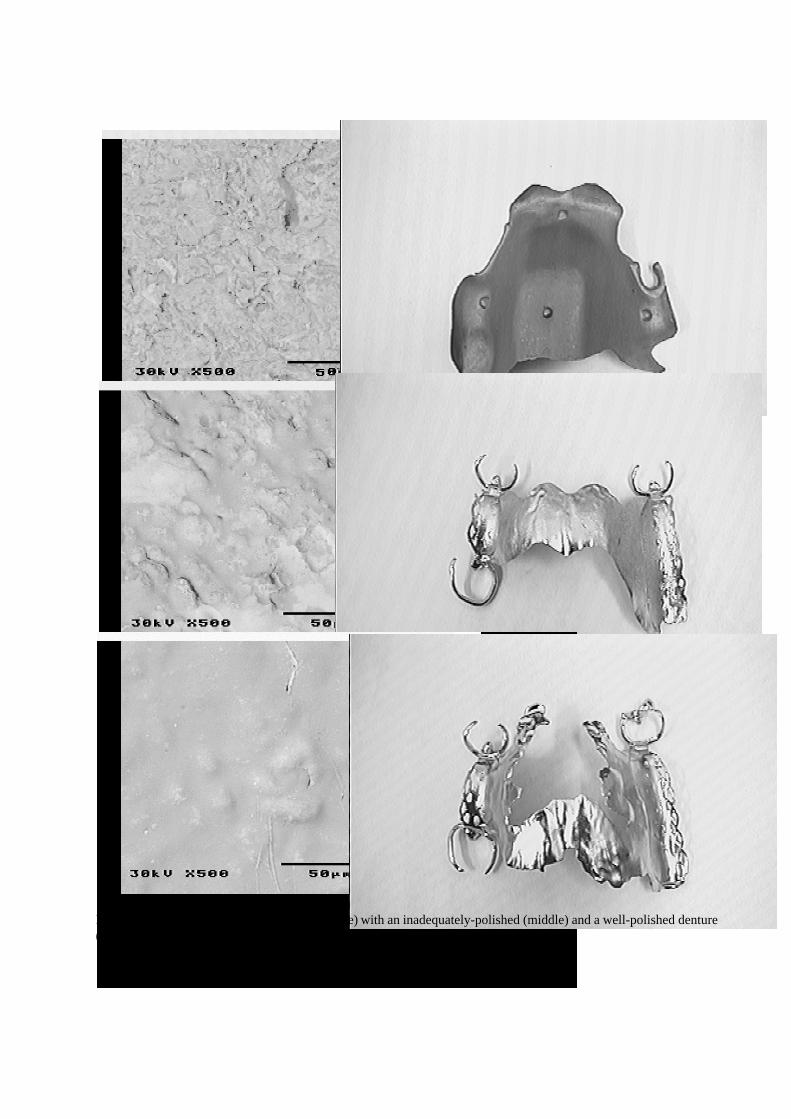
Figure11: Comparisonof anon-polished(above)with aninadequately-polished(middle)andawell-polisheddenture(right) andtherasterelectronmicroscopepictures(left) of therespectivedenturesurfaces
�j~j~��~j~¨�~j~� ��~j~���j~j~�X��~j~
~ � � � � � ~
� �j� ��©�ª\���\������r� � © �
« ��¬l� �_ �
� �\�®�\� � ��ªK� ©�� � ¡D� �K� � ��ª\��©���©¯°
Figure13: Basicpolishingtimedependingon thenumberandeffectiveareaof thedenture
��� ��
�\����\� ��\� ��
~ � � � � � ~
± �j� ���j�j�� ± �
« ��¬l� �_ �
� �\�®�\� � ��ª\� ©�� � ¡G� �\� � ��ª\� ©�� ©¯
²
Figure 14: Voltagefor the currentsupply dependingonthenumberandtheareaof thedentures
~��~��~�j~�j~��~j~
~ ��~ � ~�~ ���j~ ��~�~ ����~
polishing � time � increase� %�
electrolyte state� 1000As�Figure15: Increaseof thebasicpolishingtime dependingon theelectrolytestate(in %)
electrolyte state (As)size (A)
polishing timeincrease (%)
Figure16: 3D plot of thedependenciesbetweentheelec-trolyte state,thesizeof the dentalcastalloys andthe in-creasingpolishingtime
tool FUNNYLAB [Surm92].
Conclusions
Startingfrom a purelyuser-controlledpolishingmachinefor cobaltchromiumdentalplatecastalloys,we have de-velopedanautomaticpolishingmachinebasedonafuzzylogic controller. The depictedfuzzy rules are basedonphysicalequations,experimentalstudiesin the literatureandour own experiments.The resultsof thepreliminaryexperimentsareimplementedin a fuzzy knowledge-basewith fuzzy casetools. Thus,it waspossibleto build thefirst automaticpolishing machinefor cobalt chromiumdentures[Surm94].
With thefuzzy rulesit is possibleto considertheplau-sibility of all the input valuessimultaneouslywhile cal-culatingandstoringthe electrolytestatewithin a micro-controller, togetherwith the simultaneousevaluationofthe electrolyteageingand the size and numberof den-tures. We notethat in particular, the sizeof the denture(effective surfaceof the anode)and the electrolytestate
cannotbepreciselycalculated.So,theseveralhypothesesareweightedandcombinedwith the compositionalruleof inferencein thefuzzy logic controller.
While operatingpreviouspolishingmachines,theuserhadto estimateandadjustindividual parameterslike thesizeandcontourof thedentalcastalloy aswell astheelec-trolyte state. Now, everythingis adjustedautomatically.Furthermore,thecalculationandstorageof theelectrolytestatein the microcontrollerenablesto determinethe ex-changepointof theelectrolytewhenit is usedup throughageing. The new polishingmachineshows a consistentveryhigh qualityof thedenturesduringits servicelife.
The fuzzy systemis easyto understandandmaintainbecausethe fuzzy rulescorresponddirectly to the user’sexperience.Therefore,differentautomaticpolishingpro-cesseswith other alloys or varying electrolytesolutionscanbe developedby only shifting the membershipfunc-tions. Also, bigger and more complex polishing pro-cessescanbe automaticallycontrolledby implementingtheuser’sexperiencesin fuzzyrules,providedthatappro-priatefuzzycasetoolsareavailable.
Anode
Heating
Water
Button
Pow
er Supply
Inputs MC
Outputs MC
Shining Device Control Device
Relays
Display
TemperatureMeasurement
MeasurementA.C.
Voltage Supply
LED’sKathode
TemperatureResistance
Rectifier
PDM
MC
EPROM
Filter Circuit
Battery Power
Cobalt-ChromDentures
Supply Pipes Valve
Current ControlElectrolytic C
ell Cooling
Outputs
Inputs
Motor
R
Figure17: Schematicrepresentationof thepolishingmachinehardware
Acknowledgment This work wasdonewhen the au-thorswereat theUniversityof Dortmund,DepartmentofElectricalEngineering.Specialthanksto Prof. Dr.-Ing.Karl Goser, Dipl-Ing. Wolfgang Paschedagand KruppMedicineTechnicGmbHEssenfor supportingthis work.
References[Burk91] W. Burkhardt. Chemischesund elektrochemis-
ches(elektrolytisches)Glanzen.Galvanotechnik, 6,1991.
[Cast93] J.L. Castro. Fuzzy logic controllers are univer-sal approximators. University of Grenada,Depart-ment of ComputerScienceand Artificial Intelli-gence,TechnicalReport#DECSAI-93101,6/1993.
[Dria93] D. Driankov, H. Hellendorn,andM. Reinfrank.AnIntroduction to Fuzzy Control. Springer Verlag,Berlin, Heidelberg, New York, 1993.
[Frie90] Ronald Friedrich. Verfahren zur elektrolytischenGlanzbehandlungvon Kobalt-Chrom oder Titan-
Legierungen. PatentschriftDE 32 10 315C2, Bun-desrepublikDeutschland,Friedrich.Krupp GmbH,Essen,26.4.1990.
[Huse94] Jorg Huser. Softwareumgebung fur optimiertesan-odischesAbtragen durch Fuzzy-Control. Study atUniversityof Dortmund,Facultyof ElectricalEngi-neering,1994.
[Infr90] Togai InfraLogic. Fuzzy-CDevelopmentSystemUser’sManual. TogaiInfraLogic,1990.
[Kosk91] Bart Kosko. Neural Networksand FuzzySystems.PrenticeHall, EnglewoodClif fs NJ,1991.
[Leis92] Leisner, Moller, andAlting. CharakteristischeAs-pekte bei der elektrolytischenMetallabscheidungmit Pulsstrom.Galvanotechnik, 83,1992.
[Lind91] Jurgen Lindigkeit. Cobalt-Chrom-Dentalguß-legierungen und ihre Verwendung. Patent Of-fenlegungsschriftDE 39 41 820 A1, Bundesre-publik Deutschland,Krupp MedizintechnikGmbH,20.6.91.
[Mamd74] E.H. Mamdani.Applicationof fuzzyalgorithmsforcontrolof a simpledynamicplant. Proc. IEE, 121,Nr. 12:1585– 1588,1974.
[Pasc94] WolfgangPaschedag.Hardwareumgebungfur opti-miertesanodischesAbtragen durch Fuzzy-Control.Studyat University of Dortmund,Faculty of Elec-trical Engineering,1994.
[Poll93] BenediktPollock and Rolf Liebig. Operatingin-structions.Krupp MedicineTechnic GmbH,Essen,Germany, 9/1993.
[Sieg68] Bruno Siegel. Technischeund wirtschaftlicheVorteile desElektropolierens.Oberflache-Surface,4, 1968.
[Surm92] Hartmut Surmann, Kai Heesche, Martin Hoh,Karl Goser, and Rainer Rudolf. Entwicklungs-umgebung fur Fuzzy-Controller mit neuronalerKomponente(FUNNYLAB/WIN/SUN). VDE-Fachtagung: “TechnischeAnwendungenvonFuzzy-Systemen”,Dortmund, pages288 – 297, 12. -13.11.1992.
[Surm94] Hartmut Surmann. Verfahren zum GlanzenvonCobalt-Chrom-DentalgußlegierungensowieeinGlanzgerat zur Durchfuhrung des Verfahrens.Patent Offenlegungsschrift DE 44 01 896 A1,BundesrepublikDeutschland,1/1994.
[Surm95a] Hartmut Surmann. Automatischer Entwurf vonFuzzy Systemen. Phd. thesis, Universitat Dort-mund, Fakultat fur Elektrotechnik, VDI-VerlagDusseldorf,ISBN 3-18-345208-1,1995.
[Surm95b] HartmutSurmannandAnsgarP. Ungering. Fuzzy-rule-basedsystemson generalpurposeprocessors.IEEEMICRO,Specialissueonfuzzysystems, pages40 – 48,8.1995.
[Venk91] L. Venkatachalam,L. Mohan, and L. Guruviah.Electropolishingof stainlesssteelfrom a low con-centrationphosphoricacid electrolyte. Metal Fin-ishing, 4, 1991.
[VR72] VDI-Richtlinien. ElektrochemischeBearbeitung:Anodisches Abtragen mit auserer Stromquelle,Bad-Elysieren.VDI-3401, Blatt 2, 1972.
[Wata90] H. Watanabe,W. Dettloff, and K.Yount. A VLSIFuzzy-Logic-Controllerwith Reconfigurable,Cas-cadableArchitecture. In IEEE Journal of Solid-StateCircuits, volume25, Nr. 2, pages376 – 382,12/1990.
[Yage80] R. R. Yager. Ona generalclassof fuzzy connectiv-ities. FuzzySetsandSystems, 4:235– 242,1980.
[Zade65] Lotfi A. Zadeh.Fuzzysets. InformationandCon-trol, 8:338– 353,1965.
[Zimm90] HansJurgenZimmermann.Fuzzysettheoryanditsapplications,2nd edition. Kluwer AcademicPub-lishers,1990.