anwendung des schulz-verfahrens zur nachkorrektur einer näherungsweise berechneten...
TRANSCRIPT
Iileine Mitteilungen 115
KLEINE MITTEILUNGEN
ZAMBI 81, 115 -117 (1981)
w. MONCH
Anwendung des 8 ah ulr -Verfahrens zur Nachkorrektur einer niiherungsweise berechneten vcrallgemeinerten Inversen einer Matrix
Das auf SCAULZ [D] zuruckgeheiide Verfahren
(VO) Xa+l = Xa + Xk(I - A X t ) , k = 0, 1, ... 3
zur iterativen Berechnung der Inversen A-l einer quadratischen, reguliiren Matrix A wird in der Praxis hauptsiichlich zur Nach- korrektur eiiier (etwa mit einem direkten Verfahren berechne- ten) NiiherungZ fur A-'eingesetzt (Startwert fur (VO): X , = 2). Auf Gruiid seiner quadratischen Konvergenz ist es den linear konvergenten Verfahren zur Nachkorrektur von Niihe- rungslosungen linearer Gleichungssysteme uberlegen (8 . FOR- SYTHE, MOLER [S]). Steht keine hinreichend gute Niiherung 2 fur A-' zur Verfugung, so ist das Verfahren (VO) - falls es iiberhaupt konvergiert - i. a. wesentlich aufwendiger als direkte Verfahren zur Berechnung von A-l, gekoppclt mit einer iterativen Nachkorrektur.
(VO) kann aueh zur Berechnung einer vcrallgemeinerten In- versen einer beliebigen Matrix A E Rtn x n herangezogen werden (8. BEN-ISRAEL [l, 21, BEN-ISRAEL, COHEN [3]). Bisherige numc- rische Tests und Stabilitatsuntersucbungen (8. SODERRSIBOM, STEWART [ll], SHINOZAEI, SIBUYA, TANABE [lo]) zeigen jedoch, daB das Verfahren - insbesondere bei Matrizen mit Rangabfall - nicht geeignet ist. Allerdings wurde dabei stets von einer Startmatrix X, = aAT ausgegangen, die zwar bei geeignetem Parametor a theoretiscfi Konvergenz sichert, aber i. a. keine gute Niiheruiig fiir eine verallgemeinerte Inverse von A ist.
Hier soll gezeigt werden, wie man das Verfahren (VO) ent- sprechend dem Vorgehen von ZIELKE [12,13] fur die Nach- korrektur einer mit einem direkten Verfahren berechneten Niiherung 2 fur eine verallgemeinerte Inverse von A einsetzen kann.
die Menge aller Matrizen vom Typ (m, n) mit reellen Elementen, Rang (A) den Rang einer Matrix A, AT die zu A transponierte Matrix, condjd) .= ll$lo llA+1I2 die Spektralkonditionszahl von A und I die Einheitsmatrix (pas- senden Typs). Vorgegeben seien eine Matrix A E R m x n mit r = Rang ( A ) 5 min (m, n) sowie eine beliebige Niiherung 2 E R n x m fur eine verallgemeinerte Inverse von A. Unter einer verallgemeinerten Inversen vonA wird hier eine Liisung X E Rn x m einiger der (bzw. aller) vier PENROSE-Gleichungen
Es bezeichiic Rm
A X A = A , X A X = X , (11, (2) (AX)T = A X , (XA)T = X A , (31, (4)
(s. z. B. BEN-ISRAEL, GREVILLE [4]) verstanden. Bezeichnet wird z. B. eine Losung von (l), (2) und (3), kurz (1,2,3)-Inverse von A genannt, mitA19293; fur die Bezeichnung der MOORE- PENROSE Pseudoinversen A*,2,3,4 wird insbesondere A+ ver- wendet.
Ausgehend von einer Niiherung 2 E Rtt x m fiir eine verallge- meinerte Inverse von A -drd hier Xo zuniichst so gewiihlt, daB die Forderungen
(Fl) X , ist ebenfalls eine Niiherung fur eine verallgemeinerte Inverse von A ;
(F2) die Spalten von X: liegen im Spaltenraum von A und (F3) (VO) konvergiert von Xo aus gegen eine verallgemeinerte
Inverse von A , erfullt sind. Es wird X,=aZ(AZ)T mit a~ K' (6) gesetzt. Die erste Forderung an X, ist damit in folgendem Sinnc erfullt :
Aussage 1 : Fzir X , = aZ(8Z)T gelten die Aussagen:
(i) (ii) Falls 2 = Al**, dann X, = aAL 3 .
Falls Z E B n x n ~ beliebiy, dann X , = d3 .
(iii) Falls 2 = A% 3,
(iv) Falls Z = A1329 3 , (v) Falls Z = A + , dann X , = &A*.
Die Richtigkeit dieser Aussagen bestZitigt man unmittelbar durch Einsetzen in die entsprechenden Definitioitsgieichungen (1) bis (4). Die Forderung (FZ) ist stets erfullt.
Zum Nachweis der Konvergenz von (VO) wird eine Singulur- wertzerlegung von A 2 benotigt : A 2 = USVT rnit U, V E R m x m orthogonal ,
dann X , = aA%3 . dann X , = aAL 3.3 .
8 = diag (sl, ... , 8,) E R m x m , (6) 8, 2 ... 2 8r > sr+l = ... = S n L = 0 ,
Bezuglich der Konvcrgeilz von (VO) mit Clem Startwert (6) gilt dann der
Sa tz 2: Es seien A E R m x n und Z E R n x m vorgegeben, und es wird X , = aZ(AZ)T gesetzt. Dann koneergiert die nuch (VO) berechnete Folge { &} genau dann mit der Konvergenxordnung t= 2 gegen Z(AZ)+ , wenn 0 < a < 21s: ist.
r = &lIlg (nZ) .
Beweis: Aus der Beziehung X t = Z(A2)' - Z(AZ)* [ (AZ) (AZ)' - AX,#', k = 0, 1, ... ,
(7) deren Richtigkeit man unter Beachtung von Xk: = Z ( A Z ) + AXn: uild X t = Xr(AZ) ( A Z ) + , k = 0, 1, ... ,
(8) durch vollstiindige Induktion bestiitigt, folgt mit der Singular- wertzerlegung (6) von ( A Z ) :
1st nun 0 < a < 2/& dann gilt 11 - asfi < 1 (i = 1, ... , r) und damit lim [ I , - afW]2' = 0, so dai3 in diesem Fall { X, ) gegen Z(AZ)* konvergiert.
lim [I, - a8ST]2k = lirn UT(AZ) (AZ)+ [(AZ) (AZ)+ - AX,]2* U
daB 11 - as11 < 1 (i = 1, ... , r ) , also 0 < a < Z/e: erfullt sein muI3.
Die Konvergenzordnungt = 2 liest man unmittelbar aus(7) ab. Es soll nun angegeben werden, weichen der vier PENROSE-
Gleichungen der Grenzwert lirn Xr = Z(AZ)+ - falls er existiert - genugt.
Aussage 3: Fzir X = Z(AZ)+ gelten diefolgenden Aussagen:
Xb = Z(AZ)+ - Z V S + [ I f - aXST]2' UT ,
Gilt andererseits lim Xh = Z(AZ)+, dann foIgt wegen
= lirn UTA[Z(AZ)+ - X,] U = 0 ,
(i) Falls Z E Rn Xm beliebig, dann X = AZ3. (ii) Fall8 Rang (2) = n, dann X = AL 2 - 3 .
(iii) Fulls Rang (AZ) = ma, dann X = AL2,3. (iv) Falls Rang (A) = Rang (2) = n, dann X = A * .
Beweis: (i): Es ist X A X = Z(AZ)+ AZ(AZ)+ = Z(AZ)' = X uud
(ii): Da Rang (2) = n ist, existiert (ZZT)-1. Damit ist AZL4 =
= AZ2T(ZZT)-r = A, also X = A'. Mit (i) ergibt das insge- samt X = AL293.
(iii): Wegen Rang (AZ) = m ist X = Z(AZ)-' und damit A X A = AZ(AZ)-'A = A . Zusemmen mit (i) folgt also X =
(AX)T = [AZ(AZ)+]T = AZ(AZ)+ = A X ,
= AZ(AB)*A(ZZT) (ZZT) - l = (AZ) (AZ)+ (AZ) ZT(ZZT)-l =
d. h. X = AW.
= A1,2,3. (iv): X = Z(A2)+ = ZZ*A* = A*, da ZZt = I. Bemerkungen: 1. Fur das Residuum B, = (AZ) ( A 2 ) + - AX,, gilt liRollz =
= max 11 - as:!. llRoile wird minimal fur a = 2/(sf + a;); es ist l l i l r
dann ll&llt = (8f - 8:)/(8: + 8:) = = [cond (AZ) - l]/[cond (AZ) + 11 < 1 .
Falls daher cond (AZ) hinreichend klein ist, kann man - wie (7) zcigt - hinreicheiid schnelle Konvergenz erwarten.
2. Da mit jeder beliebigen Matrixnorm 8: 5 [ IAZ(A2)TI I gilt, kann fur die praktische Rechnung ohne groRcn Zusatz- aufwand ein Parameter a bestimmt werden, der Konvergenz sichert.

116 Kleine Mitteilungen
3. Bei beliebiger Anfangsniiherung Z E R n x m genugt X = = Z(AZ)+ i. a. nur den Gleichungen (2) und (3). Durch eine geeignete Regularisierung von 2 kann man jedoch stets errei- chen, daB der Grenzwert X eine (1,2, 3)-Inverse von A ist. Wird Z 2 T durch ( I 1 + ZZT) mit einem Regularisierungsparameter I > 0 ersetzt, dann ist X , = il(aAT) + aZ(AZ)T, d. h. X , ist aus der von BEN-ISRAEL [l, 21 und der hier verwendeten Start- matrix zusammengesetzt.
4. Eine Ubertragung dcr Betrachtungen uber (VO) auf Verfahren mit einer Konvergenzordnung t > 2 (8 . z. B. BEN- ISRAEL, GREVILLE [4]) ist moglich, allerdings im Zusammenhang mit der Nachkorrektur nicht so von Interesse.
Fur die FRoBENIns-~or?n des Defektes ( I - A&) gilt wegen I - AXk = [ I - AXo]z’ = [ I - ~ A Z ( A Z ) T ] z ’ =
= U [ I - a 8 8 T ] z k UT die Bexiehung
r
i = l 111 - AXkII; (1 - &Si)2L - 1 (7% - r ) . (9)
Daraus liest man unniittelbar die folgende Aussagc ab, die
Aussage 4: Falls X , = aZ(A2)T mit 0 < a < 21s; gewahlt
z. B. fur einen Abbruchtest, gcnutzt werden kann.
wird, gilt fiir die nach (VO) berechnete Folge { X r } t n - r 5 \ \I - AX!€+l\IP 5
5 111 - AXkl/; 5 ... 5 111 - Axolli < ’71X. Aussage 1 legt die Wuhl a = 1 nahe (es entfiillt dann eine
Abschiitzung von 4. Die folgende, sich aus (10) ergebende Aus- sage gibt in gewissen Fallen an, ob X, rnit a = 1 im Konver- genzbereich von (VO) oder aul3erhalb davon liegt.
Aussage 5: h’8 sei X , = aZ(A2)T. (i) Palls IlI - A X o l i ~ 2 m,
(ii) Falls 111 - AX,II% < m - r + 1 , dann ist 0 < a < 218: . Wird statt (6) als Startmatrix
dann ist a 2 2/91 .
X, = a(BA)TZ, E R’ (10) gewiihlt, dann ist wegen X I = aZT(ATZT)T cine Zuruckfuhrung auf den bishcr betrachteten Fall moglich, wenn man nur A durch AT und Z durch ZT ersetzt. Im Falle der Konvergenz von (VO) mit (10) gilt lim Xk = (BA)+Z = A% 4 bei beliebigem Z E Rnxm.
1st insbesondere die MOORE-PENROSE-Pseudoinverse A+ ge- sucht, 90 kann man bei beliebig vorgegebener Niiherung Z E Rn x m (mit Rang (2) = n, vgl. Bemerkung 3.) zuniichst nach (VO) mit dem Startwert X,, = aZ(A2)T die (1,2,3)-Inverse X = Z(AZ)+ van A zumindest naherungsweise berechnen und anschliehnd (VO) mitx , = G(XA)TX (vgl. (1O))neu starten. Falls 0 < G < < 21%; (& grolter singuliirer Wert von XA) ist, konvergiert die nacli dem Neustart voii (VO) berechnete Folgc {Tk} gegen Y = ( X A ) + X . Wie die folgcnde Aussage zeigt, ist Y = A’.
Aussage 6: l s 8ei X E R n x n l eine (1,2, 3)-Inverse von A . Uann gilt A+ = ( X A ) + X .
Beweis: Die Matrix Y: = (XA) ’ Xgenugt den vier Defini- tionsgleichungen (1) bis (4) fur A+ :
(i): A Y A = (AXA)YA = A ( X A ) (XA)+(XA) = AXA = A . (ii): YAY = ( X A ) + X A ( X A ) ’ X = ( X A ) + X = Y. (iii): A Y = A ( X A ) + X = A ( X A ) + ( X A X ) = A ( X A ) + X ( A X ) =
(iv) YA = ( X A ) + X A = [(XA)+XA]T = (YA)T. 1st speziell die bb3RE-PENROSE-Pseudoinverse A+ von A ge-
sucht, und wird A+ durch Liisen linearer Ausgleichsprobleme AX = I im Sinne kleinster Fehlerquadrate bestimmt, so liefern die dafiir bekannten, linear konvergenten Verfahren fur eine Nachkorrektur vonNlilierungsliisungeri (8. z. B. [ S ] und [5]) im allgemeinen nur eine (1,2,3)-Inverse von A. Das SCHULZ-VW- fahren (VO) bietet daher neben der hoheren Konvergenzord- nung noch den Vorteil, daD die damit in der oben beschriebenen Weise berechneten Niiherungen gegen A+ konvergieren.
Wird (VO) in dem hier betrachteten Sinne zur Nachkorrektur eingesetat, so ist die Iteration i. a. nur dann edolgreich, wenn bestimmte Operationen mit haherer Genauigkeit ausgefiihrt werden. Eine erste Miiglichkeit bestcht in der Hcrechnung von dx’k = x k ( I - AXk) mit hiiherer Genauigkeit. 1m Falle der
-
= A Y ( A X ) = (AYA)X = AX = (AX)T = (AY)T .
Konvergenz gilt bei beliebigon Natrizen A und 2 fur don Grenz- wert von {a&} : lim 8& = 0. Da lim (I - A&) = I - (AZ) (AZ)+ # 0 fur Rang ( A Z ) < m ist, genugt es i. a. nicht, nur (I - AX&) mit hoherer Genauigkeit zu berechnen. Eine zweite Variante, bei deren Implementierung nur die Moglichkeit einer Skalarpro- duktberechnnng mit hoherer Genauigkeit vorhanden sein muD, entsteht bei Ubertragung der f iir lineare Ausgleichsproblemu bekannten Algorithmen (s. GOLUB, SAUNDEBS [8], BJORCK [ti]).
(VO) wird iiquivalcnt (im Sinne der Analysis) umgcformt in das Verfahren (V1) Startwerte: X , 7 aZ(AZ)T E Ria xm (bzw. X , = a(ZA)T 2)
Do E Rnhxm behebig Iteration: Xk+l = xp -/- xk( 1 - AXk - Dk) -k XkDk, Dk+l = Uk -k ( I - A X k - Dk) - A[Xk(I - AXI, -
- Uk) -1- XkUk], k = 0, 1, ... , wobei (I - A x e - Dk) und x k & mit hoherer Genauigkeit und alle ubrigen Terme mit einfacher Gonanigkeit bercch- net werden.
Falls lim & = Z(AZ)+ = X existiert, konvergiert die Folge { Dk} (bei beliebigem A E R m xn, 2 E Rn x m und Do E R m x m ) gegen I - A X = I - AZ(AZ)+. Das folgt unmittelbar aus
Daher sind Do = I - A X , (mit einfacher Genauigkeit) und Do = 0 (d. h. D, = I - AX,) als Startmatrizen Do naheliegend.
Numerische Tes ts : Es wurde die von ZIELKE [12] ange- gebene Testmatrix
Dk+l - [ I - ( A z ) (~4z)~]=[(Ae) (AZ)+-AXkl2 (k = 0, 1, ...).
a a a - 1 a A = ( + ’ a a - 1
a i - 1 a a a a + 1 a f l a a 3 - 1
mit verschiedenen reellen Pararnetern a benutzt; Bang (A) =: 3, CondF ( A ) . = llAllg IIA’llp X 7.75 Jede Matrix der Form
fur la1 >> 1 ,
4a
2 2a
0 -2a -2 0 A1,2,3= - y - 1 s s y - 1 t - - s z + p
- y -1--s - y - 1 - 8 2 - p mit bcliebigen reellen Parametern 7, 8 und y ist eine (1,2,3)- Inverse von A mit 111 - ABh% 311; = 2; fur y = 6 = p = 0 erhiilt man insbesondere A+.
sniiherung Z fur einc verallgemeinerte Inverse von A wwye hier mittels HOUSEHOLDER-Transformationen uber eine QR-Zerlegung von A als Niiherung fiir A+ bereclinet und anschliel3end mit (Vl), X , = aZ(AZ)T und Do = I - AX, verbessert. Mindestens aller funf Schritte wurde ein Neustart dcr Iteration vorgenommen, um damit das in [l I ] bcschriebena Anwachscn der Rundungsfehler in Grenzcn zu halten.
Von der so ermittelten Niiherung X fur die (1, 2, 3)-Inversc Z(AZ)+ aus wurde schliel3lich (VI) mit yo = g(XA)TX und Do = I - A f , neu gestartot und damit eine verbesserte Nlhe- rung Y fur A+ berechnet.
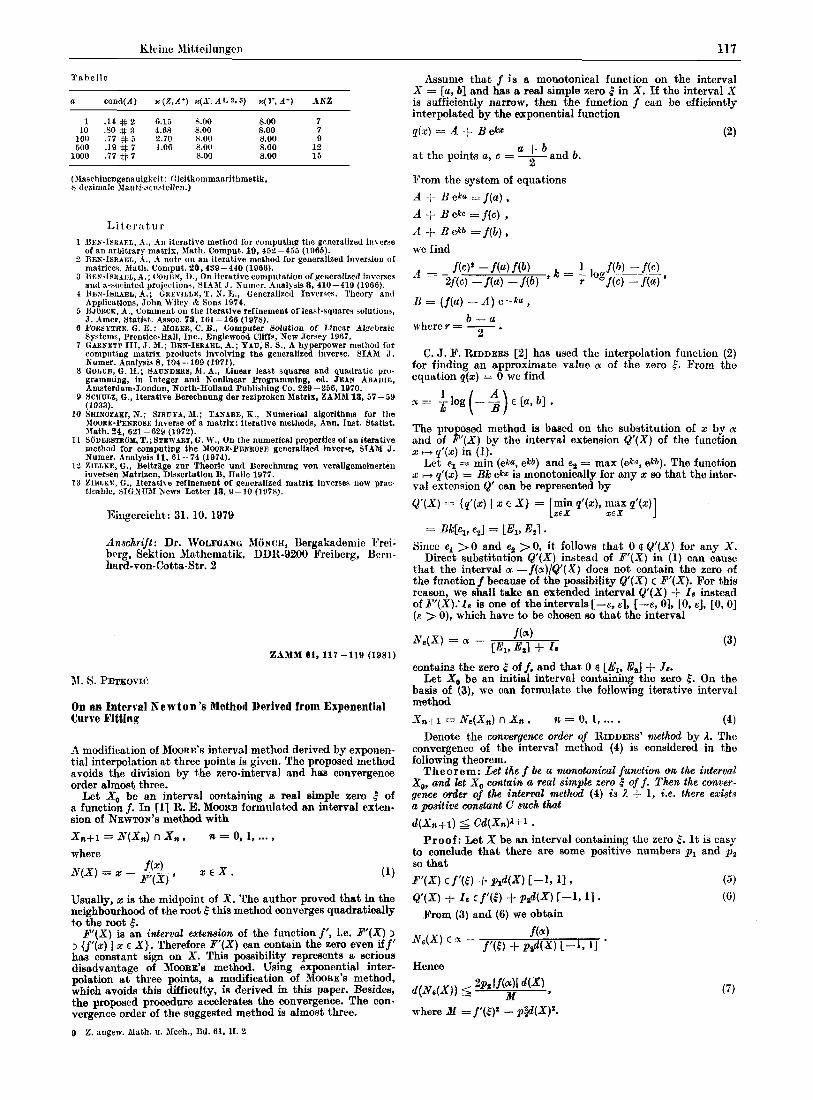
Zur Einschiitzung der Genauigkeit der Ausgangsnlherung Z und der nach iterativer Verbesserung erhalteiien Niiherung Y wurden die Grol3en x(Z, A+) und x ( Y, At) bercchnct, wobei x ( 2 , B) = -1g (max qij)
Die Anfa
mit ij
f u r 2 = (zij), B = (bij) E R n x m . Die Niiherung X wurde analog dazu mit der jeweils am niichsten gelegenen (1,2, 3)-Inverse von A, fur die x ( X , A h 293) am grol3ten ausflllt, verglichen.
I n der folgenden Tabelle sind die Ergebnisse fur a = 1, 10, 100, 600 und 1000 zusammengefaDt. (ANZ gibt die Anzahl an Iterationsschritton an.)
licrrn Doz. Dr. C;. Zielke danke ich fiir cine Reihe von An- regungen und Hinweisen
1Clike Riittcilungen 117
Tabelle
1 .14 # 2 6.15 8.00 8.00 7
100 . r7 # 5 2.70 8.00 8.00 9 500 .19 # 7 1.oe 8.00 8.00 12
10 .SO # 3 4.68 8.00 8.00 7
1000 .77 # 7 8.00 8.00 15
(nIa4cliinengeneuigheit: r:leithoiiiniaarithmetik, 8 dczimalc ~ ~ a i i t i ~ ~ e n ~ l e l l c n . )
Li t cr:t t 11 r I UBS-ISRAEL, A, , Ail itcretivc metliod fcir roinyutlng the generalized iii\ erse
2 BBS-ISRAEL. A.. A note on an iterative method for creneralired inversion of of an arbitrary mntrix, Math. Comput. lD, 452-455 (1965).
- niatrice~, Math. Compnt. ‘LO, 439-440 (1966).
3 I I R N - J S U A B L , ~ . ; C‘OHEI, D., On iterative computation of generalfzcd inverse4 ant1 aurociated projoctiow, b1.421 J. Sumer. Analysis 8, 410-419 (1966).
.I ~{BN-IYRAEL, A.; UmvmLI, T. N. li., Generalired Inverm. Thcory and Anolications. John Wilev & Eons 1974.
5 J3%RC!K, A,, Comment on the Iterative refinement of least-squares 6oIutioiiq, J. Amer. Statist. Aswc. 73, 161-166 (1978).
6 VOitSYl‘RB, G. E . ; MOIOLER, C. B., Computer Solution of Zincnr Algebraic Sy>tems, Prentice-Hall, Inc., Englewood Cliffs, Hew Jersey 1967.
computing matriv products involving the generalized inverse. SIAY J. Kumer. Analysis 8,104-100 (1971).
8 GOLUR, G. H.; SAUNDERS, &I. A., Linear least squares and quadratic prn- gramming, in Integer and Nonlinear Programming, ed. JEAN ABAI)IE, Anizterdam-London, North-Holland Publishing Co. 229 - 266, 1970.
9 SOIIGLZ, G., lterative Berechnung der reriproken Matrix, ZAJIJI 15. 67 -59 (1033).
10 YHINOZAKI, N.; SIRUYA, $1.; TANABE, h., Numerical algorithms for the ~IIOORE-PE~YXOSE inverse of a matrix: iterative methods. Ann. Inst. Statist.
7 GARRETT 111, J. JI ; BEN-ISRAEL, A.; YAU, S. S., A hyperpower method for
Math. 24, 621 -629 (1972). 11 ~ ~ ~ D E R S T R ~ J I , T.; STEIYAXT, G . W., On the numerical properties of an iterative
metliod for computing the 310ORE-PEXXOSE generalizcd inverse, SIAM J. Rumcr. Analysis 11, 61-74 (1974).
12 ZIELEE, G., Beitrlge zur Theorie und Bcrechnung von cerallgemoinerten inverseti Matrizen, Uiqscrtation B, IIalle 1977.
13 ZIBLRI, G., Iterative refinement of gencrnliaed matrix inverses now prac. ticnltlc, bIGNG‘3I News Letter 18, 9-10 (1978).
Eingercicht: 31. 10. 1979
Anschrqt: Dr. JVOLEGANG NONC!H, Bergakademic hei- bcrg, Selition Mathematik, DDlt-9200 Freiberg, Bern- hard-von-Cotta-Str. 2
Z A M I 81, 117 -119 (1981)
11. 8. YETKOVIh
On tan Interval Newton’s Method Derived from Exponential Curve Pitting
A modification of MOORE’S interval method derived by exponen- tial interpolation a t three points is given. The proposed method avoids the division by the zero-interval and has convergence order almost three.
Let X, be an interval containing a real simple eero t of a function f. In [I] R. E. MOORE formnlatcd an interval exten- sion of NEWTQS’S method with Xn+i = N(X,) n Xn, where
n = 0,1, ... ,
N ( X ) = x - - f(x) x E x. (1) F’(X) ’ Usually, x is the midpoint of X. The author proved that in the neighbourhood of the root E this method converges quadratically to the root 5.
F‘(X) is an interval extension of the functionf’, i.e. P’(X) 3 1 {f’(x) I x E X } . Therefore F’(X) can contain the zero even iff’ has constant sign on X. This possibility represents a serious disadvantage of MOORE’S method. Using exponential inter- polation a t three points, a modification of MOORE’S method, which avoids this difficulty, is derived in this paper. Besides, the proposed procedure accelerates the convergence. The con- vergence order of the suggested method is almost three. 9 Z. allgew. Nath. u. Jlcch., Ud. 61, H. 2
Assume that f is a monotonical function on the interval X = [a, b] and has a real simple zero t in X. If the interval X is sufficiently namw, then the function f can be efficiently interpolated by the exponential function q ( x ) = A + B ebz (2)
at thc points a, c = afband 2 b.
From the systcm of cquations A -1- B cku = j ( a ) ,
A -1- B ekb = f(b) , we find
A -b B C ~ C = f(4 9
IZ = (f(a) - A) e-ku, b - a
~ h c r e r = - 2 - C. J. F. RIDDERS [2] has used thc interpolation function (2)
of the zero E . E’rom tho for finding an approxiniate valuc equation q(x) = 0 we find a = - l o g ( - ~ ) E [ a , b l . 1
k The proposed method is based on the substitution of x by cs and of P’(X) by thc interval extension &‘(X) of the function x H q’(x) in (1).
Let e, I min (eka, e“) and e2 = max (eke, ekb). The function x H p’(s) = Bk etz is monotonically for any x so that the inter- val extcnsion &‘ can be represented by &’(X) = {p’(s) I z E Y} = min p‘(x), niax q’(x)
= B4%, e21 = [El, E21 . 1 [ZEX ZE .I
Since e, > O and e, >0, i t follows that 0 d &‘(X) for any X . Direct substitution &‘(X) instead of P’(X) in (1) can causc
that the interval cs - f(n)/&‘(X) does not contain the zero of the function f because of the possibility &‘(X) c F’(X). For this reason, we shall take an extended interval &‘(X) + Is instead of E”(X).’ls is one of the intervals [ - E , E] , [-e, 01, [0, E], [O , 01 ( E > 0), which have to be chosen so that the interval
contains the zero 6 off, and that 0 d [El., Ea] f Ic. Let X, be an initial intervd contaimg the zero 5. On the
basis of (a), we can formulatc the following iterative interval method Xn+i = Ne(Xn) n Xn, n = 0, 1, ... . (4)
Denote the convergence order of I~IDULCRS’ method by 1. The convergence of the interval mcthod (4) is considered in the following theorem.
Theorem: Let the f be a monotonicul function on the interval X,, and let X, contain a real simple zero 5 off. Then the conver- gence order of the interval method (4) is R + 1, i.e. there exists a positive constant C such that
Proof: Let X be an interval containing the zero S. It is easy to conclude that there are some positive numbers p , and p2 so that
From (3) and (6) we obtain