antenna parameters for incoherent backscatter heterodyne lidar
TRANSCRIPT

Antenna parameters for incoherent backscatterheterodyne lidar
B. J. Rye
The antenna and beam geometry of lidar systems employing heterodyne reception of incoherent backscattersignals are discussed. Particular emphasis is placed on systems where the target extends uniformly acrossthe transmitted beam using topographic targets or atmospheric backscatter. The geometry is assumed tobe circularly symmetrical, but otherwise arbitrary obscurations are permitted. The effects of atmosphericscintillation are neglected. Parameters are defined which characterize the system efficiency, and the condi-tions under which these parameters may be maximized are considered.
I. Introduction
Optical techniques employing incoherent backscatterfrom atmospheric scattering centers or topographictargets are currently finding application in remotesensing of the chemical composition and the physicalproperties of the atmosphere. The accuracy or sensi-tivity of these techniques will depend in some way onthe strength of the return signal and on the corre-sponding SNR. It is of engineering interest thereforeto be able to predict the variation of the former quantitywith the geometrical properties of the system. In thispaper relevant geometrical parameters are specified forincoherent backscatter systems under ideal conditionsin which the photodetector is operated as the mixingelement in an optical heterodyne receiver.
As is well known, incoherent backscatter leads toformation of a speckle pattern in the plane of the re-ceiver aperture. In atmospheric backscatter lidar thespeckles fluctuate in time as the transmitted beam scansthe scattering volume that gives rise to the instanta-neous return signal. The return field is assumed hereto have a Gaussian distribution' and cross-spectralpurity, 2' 3 which implies that the correlation function ofthe field can be factorized into time and space depen-dent terms. Only the latter are relevant to the geo--metrical problem, and the temporal parameters, whichare also, of course, relevant to signal processing, are notdiscussed here. The scattering volume has a depth (inrange) equal to half of the spatial length of the trans-mitted laser pulse. It is assumed here that this depth
The author is with University of Hull, Department of AppliedPhysics, Hull, HU6 7RX, England.
Received 23 May 1978.0003-6935/79/091390-09$00.50/0.© 1979 Optical Society of America.
is small compared with the range and that the densityof the scattering centers is at most only range depen-dent. Moreover, in much of the discussion below ontopographic backscatter, the transmitted beam profileis assumed smaller than the target area. In short, forboth types of system the scattering source will be re-garded as a surface with a uniform backscatteringcoefficient. As to the geometry of the optical systemit is assumed that this is circularly symmetric, but thatotherwise the antenna geometry and transmitted beamprofile are arbitrary. The receiving telescope optics isassumed free of transmission loss and aberrations, whileall diffraction formulas are given in the Fresnel ap-proximation. Depolarization of the backscattered lightis neglected, as are the effects of atmospheric scintilla-tion; early calculations by Fried4 suggest that the latteris more realistic in the ir than at shorter wavelengths.
The fundamental properties of lidar systems thatemploy direct detection of an incoherently backscat-tered signal have been considered by Goodman. Inparticular the contribution to the noise in a return en-ergy measurement due to speckle intensity fluctuationsis shown to dominate that due to quantum noise if therate at which photoelectrons (or photocarriers) aregenerated exceeds the rate at which "correlation cells"of the speckle pattern are received. Discussion of thereturn from such a (quasi-thermal) incoherent scat-tering source closely parallels the classical optical dis-cussion of the field obtained from thermal sources wherethe speckle is usually referred to as the spatial modepattern of the observed field; in the latter case attentionwas drawn to the intensity fluctuation term as a self-beating signal in the ac coupled output of the photo-detector by Forrester et al. 6 For heterodyne receptionthe signal is also in the ac coupled output of the photo-detector, and the significance of the spatial mode orspeckle structure of the partially coherent field at the
1390 APPLJED OPTICS / Vol. 18, No. 9 / 1 May 1979

receiver aperture is to limit the mean optical poweravailable to the receiver; a discussion of the physicalprinciples involved in this is given in the review byCummins and Swinney.7 The antenna theorem of rel-evance when a heterodyne receiver is illuminated by anextended source was discussed by Siegman8; in generalthis defines the acceptance pattern of the receiver, andin the present context it determines the efficiency withwhich the local oscillator is mixed with the return, whichis of special importance in lidar systems since it is afunction of range. Sonnenschein and Horrigan 9 haveobtained analytic expressions for the return signalarising from atmospheric backscattering in a heterodynelidar system as well as for that from a nonlidar systemwhere a continuous wave source is used with no rangeresolution. However, their results are restricted to thecase where the transmitted beam profile is an untrun-cated Gaussian, and the receiver aperture is a disk.Where high power laser pulses are transmitted, thetransmitter and receiver paths may have to be spatiallyseparated to isolate the detector from the transmittedbeam, in which case antenna obscuration would haveto be taken into account in a coaxial configuration.This has been done by Degnan and Klein10-' 2 in a seriesof papers relating to coherent backscatter lidar, i.e., itis assumed that backscattering is obtained from a singleunresolvable point target rather than from a randomarray of such targets. A complete parametric descrip-tion of a heterodyne receiver would contain the conceptsof conversion gain for a coherent input signal and thequantum noise figure introduced by Arams et al., 1
3 butthese are omitted here as it is intended to consider onlygeometrical effects.
The layout of the paper is that the standard formulasfor the output current of a photodetector illuminatedby incoherent light are given in Sec. II; it is shown thatthe nontrivial geometrical parameters relating to thisoutput are integrals of the mutual intensity across thedetector surface so that this quantity is calculated andrelated to the complex degree of coherence of the fieldat the receiver aperture which is determined in Sec. III;the parameters that can then be defined are listed inSec. IV and the results discussed there and in Sec. V.
11. Mixing Signal
A. Receiver Output
In a heterodyne receiver the photodetector is illu-minated by a local oscillator (l.o.) beam (assumed co-herent) as well as by the signal and acts as a mixer, theac coupled output of which is detected using techniquesappropriate to the intermediate frequency (i.f.).14 Ifthe i.f. detector is a square-law rectifier, its currentoutput is proportional to the mean square ac output ofthe photodetector the spectral density of which can beshown to be (see Appendix A)
i(V)2)- e2F, {7('II)6(T) + 2 Re (-)IgS(T)l exp(jcOT)
x JAD SJD JR(al:a 2)JL(al:a 2)dajda2, (1)
where the Fourier transform operator is defined by theintegral'5 F^{f (-)) = Sf(T) exp(j27rrr)dT, the functiongS(T) is the normalized temporal correlation functionof the scattered field, and JR (al: a2 ) and JL (al:a 2 ) de-scribe the mutual intensities of, respectively, the re-ceived signal and the l.o. beam on the detector surface,of which the area is AD and where position is defined bythe 2-D vector a. It is assumed in deriving Eq. (1) thatthe l.o. photon flux on the detector surface (L) isgreater than the flux due to the received field and thatthe photodetector gain is unity, while recombinationnoise is neglected. Writing the subscripts 0, L, and Sto refer, respectively, to the laser output, the local os-cillator and the scattered beams, the angular frequencyW = WL - US << L. If the scattered light is assumed tobe quasi-monochromatic, 2 vO v PL vs; throughoutthis paper each of these quantities is simply written v.In Eq. (1) the first term on the right-hand side is theshot noise of the carriers or photoelectrons generatedby the local oscillator, and the second is the mixingterm.
The rms noise output of such a receiver is the rootvariance of i 2, and by calculation of the higher ordermoments of the ac photodetector output, it can beshown that this is
[((A2)2)]1/2 = [(i4)- (i2)2]1/2 21/2(i2) (2)
which would be the (exact) result if the distribution ofi was Gaussian. In discussing heterodyne detection ofincoherent signals Cummins and Swinney7 postulatedthat i is Gaussian by invoking the central limit theoremin the case where there are many spatial modes of thefield incident on the photodetector; it appears,16 how-ever, that this assumption is not necessary for hetero-dyning (although it is required for self-beating whichwas also under discussion in Ref. 7), the conditionsmerely being that the optical field is Gaussian and thatthe degeneracy of the local oscillator beam is greaterthan unity. Details of the calculation of (4) are toolengthy to be included here, but calculations of thehigher moments of it which lead to the same conclusionas that given here have been published by Jakeman etal. 17 For our present purpose the significance of Eq.(2) is that the geometry-dependent part of the receiveroutput is completely specified by the double integralover area in the mixing term in Eq. (1).
B. Antenna Plane Equations
Since the irradiance of the return in the plane of thereceiving antenna is uniform, the mutual intensity canbe written
J.R(bj:b2) = ((PR)hV)/ARJAS(fl), (3)
where b is the position vector in this plane, and = I bi- b2I; ,us (j) is the complex degree of coherence of thefield, and (PR) is the mean photon flux received overthe antenna area AR.
For the purpose of calculating the mutual intensityin the plane of the detector it will be assumed that the
1 May 1979 / Vol. 18, No. 9 / APPLIED OPTICS 1391
ANTENNAPLANE
DETECTORPLANE
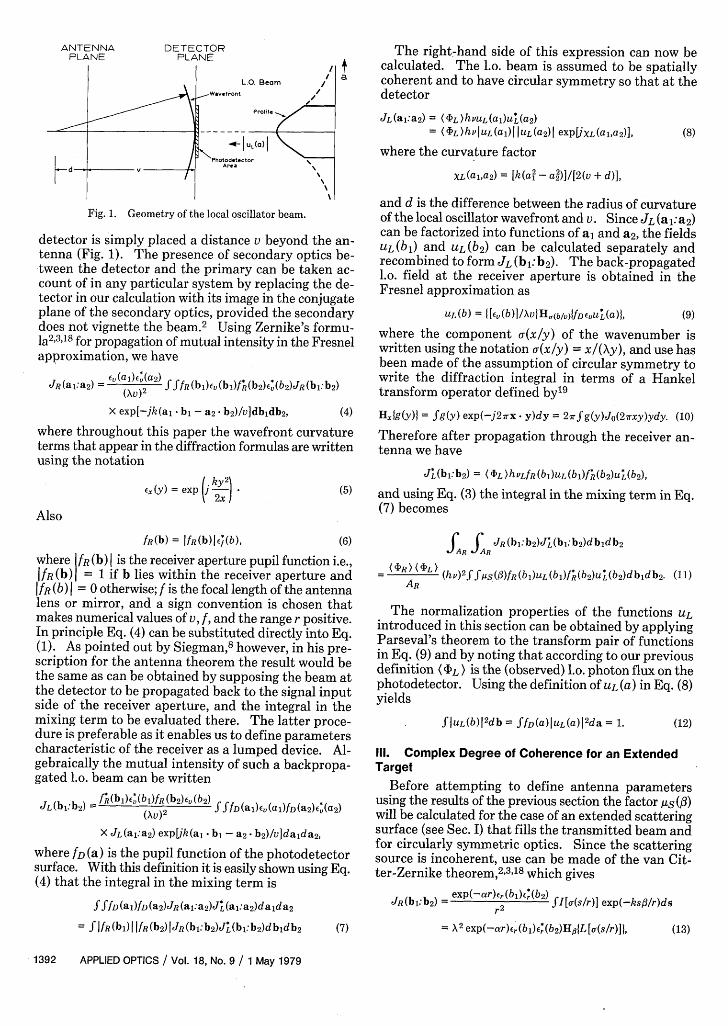
Fig. 1. Geometry of the local oscillator beam.
detector is simply placed a distance v beyond the <tenna (Fig. 1). The presence of secondary optics Itween the detector and the primary can be takencount of in any particular system by replacing thetector in our calculation with its image in the conjug,plane of the secondary optics, provided the second-does not vignette the beam.2 Using Zernike's forn.la2'3"18 for propagation of mutual intensity in the Fresapproximation, we have
JR(al:a2 ) = E((ali)4)(a2) fffR(bl)(V(bl)fR(b2)eU(b2)JR(bl:b2)
X exp[-jk(a, - bi - a2* b2)/V]dbidb 2 ,
where throughout this paper the wavefront curvattterms that appear in the diffraction formulas are writtusing the notation
El(y)exp(I-
Also
fR(b) = IfR(b)ie*(b),
The right-hand side of this expression can now be+ calculated. The l.o. beam is assumed to be spatiallya coherent and to have circular symmetry so that at the
detector
JL(al:a2) = (L)hvUL(al)uj(a 2)= (L)hvIUL(al) IUL(a2)I exp[JXL(al,a2)], (8)
where the curvature factor
XL(al,a2) = [k(al - a2)]/[2(v + d)],
and d is the difference between the radius of curvatureof the local oscillator wavefront and v. Since JL (a:a 2 )can be factorized into functions of a, and a2, the fields
in- UL(bl) and UL(b 2) can be calculated separately ande- recombined to form JL (bl: b2). The back-propagated
Ic- l.o. field at the receiver aperture is obtained in thele- Fresnel approximation asAearynu-
nel
(4)
ireten
(5)
(6)
where fR (b) is the receiver aperture pupil function i.e.,IfR (b) = 1 if b lies within the receiver aperture and
IJR (b) = 0 otherwise; f is the focal length of the antennalens or mirror, and a sign convention is chosen thatmakes numerical values of v, f, and the range r positive.In principle Eq. (4) can be substituted directly into Eq.(1). As pointed out by Siegman, 8 however, in his pre-scription for the antenna theorem the result would bethe same as can be obtained by supposing the beam atthe detector to be propagated back to the signal inputside of the receiver aperture, and the integral in themixing term to be evaluated there. The latter proce-dure is preferable as it enables us to define parameterscharacteristic of the receiver as a lumped device. Al-gebraically the mutual intensity of such a backpropa-gated l.o. beam can be written
JL(bl:b 2 ) = f(bj)E,(bj)/R(b 2)fv(b2) R.fD(ai)EV(aN)fD(a2)E*(a2 )(AuV)2 fv
X JL(al:a 2) expLjk(a b - a2 b2)/u]dalda 2,
where fD (a) is the pupil function of the photodetectorsurface. With this definition it is easily shown using Eq.(4) that the integral in the mixing term is
SfD (af)fD (a2)JR (ai:a2)4J(ai:a 2)dajda 2
= r IfR(bl) I IJR(b2) JR (b1:b 2)JL(bl:b 2)db1db 2 (7)
UL(b) = [E(b)]/AvuH,(b/v,)IfDeU*L(a)), (9)
where the component (x/y) of the wavenumber iswritten using the notation o(x/y) = x/(AXy), and use hasbeen made of the assumption of circular symmetry towrite the diffraction integral in terms of a Hankeltransform operator defined by' 9
Hxlg(y) = fg(y) exp(-j27rx- y)dy = 27rfg(y)Jo(27rxy)ydy. (10)
Therefore after propagation through the receiver an-tenna we have
JL(bl:b2 ) = (L)hvLfR(bl)uL(bl)f*(b 2 )u2(b2 ),
and using Eq. (3) the integral in the mixing term in Eq.(7) becomes
fAR fAR JR(bl:b2)JL(bl:b2)dbldb2
= (R) L) (hv) 2 ffLs()fR(bl)uL(bl)fR(b 2 )uL(b 2 )dbldb 2 (11)AR
The normalization properties of the functions ULintroduced in this section can be obtained by applyingParseval's theorem to the transform pair of functionsin Eq. (9) and by noting that according to our previousdefinition (bL) is the (observed) l.o. photon flux on thephotodetector. Using the definition of UL (a) in Eq. (8)yields
.fUL(b)j2db = ffD(a)iuL(a)j 2 da = 1. (12)
111. Complex Degree of Coherence for an ExtendedTarget
Before attempting to define antenna parametersusing the results of the previous section the factor ,4s()will be calculated for the case of an extended scatteringsurface (see Sec. I) that fills the transmitted beam andfor circularly symmetric optics. Since the scatteringsource is incoherent, use can be made of the van Cit-ter-Zernike theorem, 2 3"18 which gives
JR(bl:b2 ) = exp(-fr)r(bl)'(b 2 )I[a(s/r)] exp(-ksfl/r)ds
= A2 exp(-ar) ,(b)Er(b2)H1L[a(s/r)] , (13)
1392 APPLIED OPTICS / Vol. 18, No. 9 / 1 May 1979

(R) 1 A : exp(-2ar) N2 r
(18)
where fls is the differential (per unit solid angle) volumeextinction coefficient for backscatter and NT thenumber of transmitted photons in the transmittedpulse. For topographic backscatter it is easily shownthat2 0
( = pAR exp(-2ar) p-rhv r2
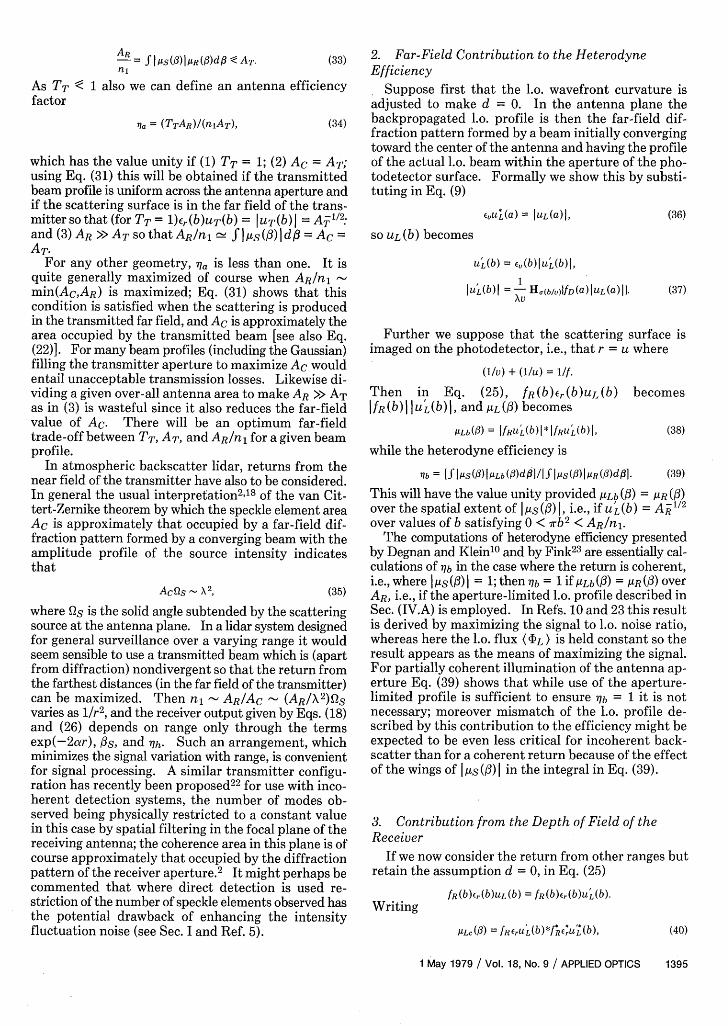
Fig. 2. The transmitted beam geometry for atmospheric backscatterlidar.
where s is the position vector in the scattering plane atrange r (see Fig. 2), and account has been taken of at-mospheric absorption through the over-all volume ex-tinction coefficient a.
The radiance L[0(s/r)] of the scattering source isdetermined by the profile of the transmitted beam inthe scattering plane. Now the transmitter aperturefunction can be written
VT(bt) = I 1M fT(b)UT(b),1c
where Po(t) is the laser output power, fT(b) and AT are,respectively, the pupil function and the area of thetransmitting antenna, and UT(b) = IUT(b)IEro(b) de-scribes the wavefront of the transmitted beam, ro beingthe radius of curvature (taken positive if the beam isdiverging); the amplitude profile function IuT(b) isnormalized by the relation
ClfUT(b)I2 db = 1. (14)
It may be noted that if vignetting at the antenna aper-ture is the only contribution to the transmission loss TTat the transmitter,
TT= ffT(b)IuT(b)I 2db. (15)
The irradiance of the transmitted beam at range r isgiven in the Fresnel approximation by
IT [(slr),t + = ceo VT st + 12 exp(-ar)
A2r2 exp(-ar) IH.(s/r)fTEruT(b)U12. (16)
Useful parametric plots effectively of this function havebeen given by Klein and Degnan"l for the case where thetransmitted amplitude profile IUT(b)l is Gaussian.The relation between L and IT can be written L = KIT.In principle all three quantities in this equation arefunctions of s [or (s/r)]; if the scattering surface is as-sumed to have a uniform backscattering coefficient,however, K is a constant, so by substituting in Eqs. (13)and (16)
KPo(t) exp(-2ar)JR(bl:b2)= r2
X Er(b1),E(b2 )HII1jH,(s/r)!fTErUT(b)1121 (17)
K can now be removed from this equation by notingthat JR (bi:bi) = (R )h,/AR and using standard ex-pressions for the return flux (R) in the situations ofinterest. In atmospheric backscatter lidar20
(19)
where p is the effective reflectivity for the scattering.Either Eq. (18) or Eq. (19) can then be used in con-
junction with Eq. (3) to define the mutual intensity ofthe received field. In both cases
(20)Js(i3) = JUs (G)IEr(bl) (b2),
where [from Eq. (17)]
1[us(3) = - Hfl H,(s/r)1fTerUT(b)II2 }
TT
which has the required property that AS (O) = 1. Inwriting Eqs. (20) and (21) use has been made of theconvolution theorem of Hankel transforms and the re-sult that autocorrelation integrals of circularly sym-metric functions are real (see Appendix B).
If the scattering surface lies in the far field of thetransmitter, i.e., if
1+ 1 Ar ro AT
fTErUT(b) -fT I UT I (b), and the complex degree of co-herence of the scattered field is
(22)IgS(f)I = -- fT IuTI (b)*JTIUTI (b),TT
which contains simply the self-convolution of the am-plitude distribution across the aperture of the trans-mitter; this result has been previously mentioned byGoodman.5 Whereas if the scattering volume lies atlong range r >> AT/X i.e., if fTErUT(b) fTUT(b),
(23)
which contains the autocorrelation of the transmitteraperture function.IV. Antenna Parameters
A. Speckle Count and Heterodyne Efficiency
In view of the relatively simple expressions for ,s (Oobtained in Eqs. (20) and (21), it is convenient to rewriteEq. (11) in the form
C C JR(b1:b 2 )JL(bl b2)dbldb 2JAR .JAR
-(R) (hV)2fS I(3)IJR(b1)r,(bl)UL(bl)AR
f~(b2)4(b2)uI(b2 dbidb2
- A (hv)2lfIs()pL(fl)dfl,AR (24)
where
(21)
1 May 1979 / Vol. 18, No. 9 / APPLIED OPTICS 1393
SCATTERINGVOLUME
ANTENNAPLANE
b
Igs(O)l - 11(TTAfTUT(bWTU�(b),

AL(f) = frUL(b)*fR'EUI(b) (25)
is a real function and use has been made of Eq. (B4).This definition enables us to separate antenna param-eters dependent only on the return speckle count andon the matching of the wavefront of the return with thatof the local oscillator. Specifically we rewrite the meansquare ac photodetector output [Eq. (1)] as
(i(V)2 ) = e2 -('L4) F[b(T) + 2-ih (R ) IgS&)l COSwT] (26)nl
by combining Eqs. (7) and (24) and using the result thatthe integral in Eq. (24) is real. The factors
AR
i= SU)AsR(3d] (27)
?1hf | Ss () IALL ()d# (28)
XI AS(SI)R(OWd
while
AR(1) = - IfR(b)I* R(b)IAR
is the modulation transfer function of the receiver ap-erture.
A physical interpretation of n, may be obtained froma consideration of its behavior in the limiting caseswhere the spatial extent of Is (3) I is either muchgreater or much less than that of i'R (), which is ap-proximately the area of the receiver aperture. In thelatter case we can substitute i'R (SO) = 1, S0
AR A,
SIs(O)Idfl Ac' (30)
where the expression indicated for AC is an appropriatedefinition here for the coherence area of the scatteredfield at the receiving antenna,2 3 721 i.e., the area occu-pied by a single element of the speckle pattern. n cantherefore be interpreted as the mean number of speckleson the receiver. If on the other hand the extent ofIi's (3) I is much larger than AR so that over the receiverIi's(/3) 1,
fI AS W)IMR(fl)d# fAR(3)d = AR,
and the speckle count n1 has become unity, which wouldbe expected as in this limit the scattered field is spatiallycoherent across the receiver aperture. Equation (27)may be compared with the expression given by Good-man5 for the speckle count appropriate in calculatingthe intensity fluctuation contribution to the noise indirect detection, which in the present notation is
N1 = AR/[IS(1)I 2 ,1R(Odfl1.
The heterodyne efficiency -Oh, which takes accountof wavefront mismatch, has the maximum value of unityif i'L (/3) = i'R (/3). Comparing the definitions of i'L (p3)and A'R () in Eqs. (25) and (29) this entails that (1)
+ arguL(b) = 0
so that the wavefront curvatures are matched and (2)IUL (b) I = A /2 so that the backpropagated l.o. beam
just fills the receiver aperture. An l.o. beam satisfyingthese conditions will be termed aperture-limited sinceif propagated back beyond the antenna it would definean acceptance pattern for the receiver which is dif-fraction limited at range r by the aperture; also of courseits profile in the image plane would be the far-fielddiffraction pattern of the aperture. Such an aper-ture-limited l.o. beam can be produced in principle ifthe photodetector is placed in the imaging plane of thesource, an l.o. beam of uniform profile and radius ofcurvature equal to the range is combined with the re-ceived field before the receiving antenna, and the pho-todetector area is sufficiently large to take in the dif-fraction profile so formed. This construction is oftenused to calculate heterodyne receiver outputs (see, forexample, Ref. 4). However, it may be difficult to avoidapodising the l.o. profile in the ir where the photode-tector area is small or to illuminate each single elementof a detector array in such a way. In these cases, andwhere wavefront curvature matching is nontrivial as inlidar, the heterodyne efficiency has to be taken intoaccount.
B. Efficiency ParametersIn this section the receiver output is expressed in
terms of the maximum value available, and a series ofefficiency parameters are defined that describe theextent to which this value is degraded. The antennaefficiency 17a is derived from the antenna and trans-mitted beam geometry and determines for a givenbackscatter the mean power returned within a singlespeckle element and accepted by the receiver aperture.This factor therefore delimits the mean signal availablewith correct adjustment of the local oscillator beam.The heterodyne efficiency of the receiver is expandedinto the factors ?7h = 'b 77cd, where lb describes mis-match between the amplitude profiles of the receivedand local oscillator wavefronts in the antenna plane, 'lcthe curvature mismatch of these wavefronts, and d theeffects of having improper local oscillator wavefrontcurvature at the detector, i.e. [from Eq. (8)] the effectsof having d 5d 0.
1. Antenna EfficiencyThe expression for the coherence area defined in Eq.
(30) together with the definition of Iis (I) in Eq. (21)can be combined with Eq. (B5) of Appendix B to give
Ac = fl s(l)1dl
ffTErUT(b)*fTEup(b)d,TT
= 1 IffT(b)(r(b)UT(b)db 2TT
Applying Schwartz' inequality we have
IffT(b)e,(b)UT(b)db 2
(31)
::J fT(b)lkr(b)I 2dbSfT(b)IUT(b)1 2db = ATTT,
TT being defined in Eq. (15). Hence
Ac AT.
Since A'R (/) 1 for all values of fl it follows that
(32)
1394 APPLIED OPTICS / Vol. 18, No. 9 / 1 May 1979
AR= JAS(U)|R()dl: AT. (33)ni
As TT < 1 also we can define an antenna efficiencyfactor
P = (TTAR)/(n1AT), (34)
which has the value unity if (1) TT = 1; (2) AC = AT;using Eq. (31) this will be obtained if the transmittedbeam profile is uniform across the antenna aperture andif the scattering surface is in the far field of the trans-mitter so that (for TT = 1)er(b)UT(b) = UT(b) I AT 1/2and (3) AR >> AT sothatAR/ni f i's(0)d = AC =AT
For any other geometry, 7a is less than one. It is
quite generally maximized of course when AR/n, 1min(Ac,AR) is maximized; Eq. (31) shows that thiscondition is satisfied when the scattering is producedin the transmitted far field, and AC is approximately thearea occupied by the transmitted beam [see also Eq.(22)]. For many beam profiles (including the Gaussian)filling the transmitter aperture to maximize AC wouldentail unacceptable transmission losses. Likewise di-viding a given over-all antenna area to make AR >> ATas in (3) is wasteful since it also reduces the far-fieldvalue of AC. There will be an optimum far-fieldtrade-off between TT, AT, and AR/ni for a given beamprofile.
In atmospheric backscatter lidar, returns from thenear field of the transmitter have also to be considered.In general the usual interpretation ' 18 of the van Cit-tert-Zernike theorem by which the speckle element areaAC is approximately that occupied by a far-field dif-fraction pattern formed by a converging beam with theamplitude profile of the source intensity indicatesthat
ACQS - X2, (35)
where Qs is the solid angle subtended by the scatteringsource at the antenna plane. In a lidar system designedfor general surveillance over a varying range it wouldseem sensible to use a transmitted beam which is (apartfrom diffraction) nondivergent so that the return fromthe farthest distances (in the far field of the transmitter)can be maximized. Then n - AR/Ac - (AR/X2 )QSvaries as 1/r2 , and the receiver output given by Eqs. (18)and (26) depends on range only through the termsexp(-2ar), s, and 77h. Such an arrangement, whichminimizes the signal variation with range, is convenientfor signal processing. A similar transmitter configu-ration has recently been proposed22 for use with inco-herent detection systems, the number of modes ob-served being physically restricted to a constant valuein this case by spatial filtering in the focal plane of thereceiving antenna; the coherence area in this plane is ofcourse approximately that occupied by the diffractionpattern of the receiver aperture.2 It might perhaps becommented that where direct detection is used re-striction of the number of speckle elements observed hasthe potential drawback of enhancing the intensityfluctuation noise (see Sec. I and Ref. 5).
2. Far-Field Contribution to the HeterodyneEfficiency
Suppose first that the .o. wavefront curvature isadjusted to make d = 0. In the antenna plane thebackpropagated .o. profile is then the far-field dif-fraction pattern formed by a beam initially convergingtoward the center of the antenna and having the profileof the actual l.o. beam within the aperture of the pho-todetector surface. Formally we show this by substi-tuting in Eq. (9)
Evu2(a) = IuL(a)I,
so UL(b) becomes
uL(b) = Ec(b)lu(b)l,
IuL(b)I = - H,,(b/v)fD(a)IUL(a) I.
(36)
(37)
Further we suppose that the scattering surface isimaged on the photodetector, i.e., that r = u where
(1/v) + (/u) = 1/f.
Then in Eq. (25), fR(b)er(b)UL(b)IfR(b)I I uL(b)I, and L(O) becomes
/Lb(U) = fRu(b)I*IfRuL(b),
while the heterodyne efficiency ist7b = [S(lOsU3) IULb()d]/[Ips(U)IgR()d#].
becomes
(38)
(39)
This will have the value unity provided i'Lb (/3) = iR (/)over the spatial extent of l's (d) l, i.e., if u ~(b) = AR 1/2over values of b satisfying 0 < u-b2 < AR/n1.
The computations of heterodyne efficiency presentedby Degnan and Klein1 0 and by Fink23 are essentially cal-culations of 'lb in the case where the return is coherent,i.e., where Ii's (/3 I = 1; then ab = 1 if i'Lb (/) = i'R (3) overAR, i.e., if the aperture-limited l.o. profile described inSec. (IV.A) is employed. In Refs. 10 and 23 this resultis derived by maximizing the signal to l.o. noise ratio,whereas here the l.o. flux (L) is held constant so theresult appears as the means of maximizing the signal.For partially coherent illumination of the antenna ap-erture Eq. (39) shows that while use of the aperture-limited profile is sufficient to ensure "lb = 1 it is notnecessary; moreover mismatch of the .o. profile de-scribed by this contribution to the efficiency might beexpected to be even less critical for incoherent back-scatter than for a coherent return because of the effectof the wings of I s in the integral in Eq. (39).
3. Contribution from the Depth of Field of theReceiver
If we now consider the return from other ranges butretain the assumption d = 0, in Eq. (25)
fR(b)Er(b)UL(b) = fR(b)Er(b)UL(b).Writing
ALc(O) = fRErUL(b)fRGrUL (b), (40)
1 May 1979 / Vol. 18, No. 9 / APPLIED OPTICS 1395
the wavefront curvature component of the heterodyneefficiency can be defined as
?CllsS~c$, (41)CS S(al)|ALb(3)dfa
Comparing Eqs. (37), (38), and (40) it can be seen thataqc - 1 if the argument of fR(b)Er(b)UL(b),
kb2 1 <r2 r 2
over the smaller of the spatial extent of I s() I or thereceiver aperture, i.e., if
1 11 n1) 42
u r AR
The field of depth defined by (42) is not confined toranges r u because of the range dependence of AR/ni.Consider the parallel transmitted beam geometrysuitable for a range surveillance lidar system as dis-cussed in Sec. IV.B.1 with u - (v = f). Since Qs <AT/r 2 in the transmitter near field, AR/ni X2/QSr2 ; therefore (42) can be satisfied as r - 0, and arc hasa minimum at intermediate ranges. If moreover thetransmitted beam is approximately uniform across thetransmitter aperture we have Q, AT/r 2 and AR/ni =X
2 r2/AT. Substituting in (42) then gives the conditionr << AT/X; since this defines the transmitter near fieldit is necessarily satisfied. Likewise since in the trans-mitter far field AR/n, i AT, (42) becomes r >> AT/X,which is also satisfied by definition. If follows that forthis configuration any minimum in 77c must occur at rt AT/X. Criteria such as (42) are of course approxi-mate, and no account can be taken here of nonoverlapbetween the transmitted beam and the acceptancepattern of the receiver at short range.
4. Local Oscillator Depth of FocusFinally, to allow for incorrect adjustment of the l.o.
curvature (d Ed 0), a third component of the heterodyneefficiency can be defined as
?d = [S|S(f)IL(fl)dit/[fgs(fl)ALc(0)dfl]. (43)
This contribution is of order unity if over AR/ni,i'Lc() i'L(), i.e., comparing Eqs. (25) and (40), ifUL(b) c u(b). A more strict condition, namely, thatUL(b) u (b) foi'all b can be specified by comparingEqs. (10) and (37) using Eq. (36), which yields
ka 2 ! 1 I r
2 v v+d 2
over AD, i.e., if
I1.' 1 < " X I.(44)v v+d ~ADI
As might be expected this inequality is not especiallyrestrictive where the small detector areas associatedwith aperture-limited l.o. beams (Sec. IV.A) are used.For example an l.o. beam having the aperture-limitedprofile may be produced by placing the photodetectorin the focal plane of the receiving antenna and bringingan l.o. beam initially having a uniform profile to a focuson the photodetector using a small ancillary optical
system having the same F-number Nf as the receivingantenna; the pupil function of this ancillary systemwould be a scaled-down form of that of the antenna.For such an arrangement v + d equals the focal lengthof the focusing lens in the ancillary optics so 0 < v + d< v = f, and (44) becomes v + d >> AD/X Since theeffective photodetector area in this case (i.e., the areailluminated by the l.o.) is AD - N'X 2, (44) becomesapproximately v + d >> NFX, which should be simple tosatisfy. Vignetting of the l.o. profile by the edge of thephotodetector merely relaxes this condition further.
If larger detector areas are used to take in more of thearea occupied by the received field, according to thestrict condition (44) it becomes increasingly importantfor the l.o. beam to have the correct curvature. It maybe noted that (44) has no range-dependent terms.
V. Summary and DiscussionExplicit expressions can now be given for the spectral
density of the mean square ac photodetector output forthe cases considered here. For topographic backscatterit is reasonable to suppose that are = 1, since for a targetof known range the wavefront curvatures can be cor-rectly matched. Hence using Eq. (19), Eq. (1) be-comes
(i2 (v)) = e2n(4L)FVI6(r) + 2Pa~nbldATflSC
exp(-2ar) p Po IgS() cosr2 irhvI
(45)
For atmospheric backscatter lidar on the other hand,ac is potentially a major source of range variation in theoutput signal, so using Eq. (18) we have
(i 2 (v)) = e271(4L)F{6(T) + 17a ?lb ?cfldATOSC
exp(-2ar) Nolgs(-)l cos} - (46)
The efficiency parameters used here have been de-fined in Sec. IV.B essentially by factorizing the integralin the mixing term f l Is() I iL (O)d [see Eq. (24)]. Acomparison of the definitions of A'L (/) in Eq. (25) andI As (/3 ) in Eq. (21) indicates the symmetry that existsbetween the receiver and transmitter system geome-tries, provided the acceptance properties of the receiverare defined using Seigman's prescription; the trans-mitted field is described by use of the factor fTErUT(b)in the standard Fresnel diffraction formula [cf. Eq.(16)], whereas the receiver acceptance pattern can bedescribed by use of the analogous factor fR rUL (b) in thesame equation. It is sometimes asserted that hetero-dyne systems in this application have intrinsically highspatial resolution compared with direct detection sys-tems (see, for example, Ref. 20). This point of viewseems to derive from a misinterpretation of Siegman'stheorem. In fact it is evident from the mixing term thatany spatial filtering has to be achieved either by ad-justment of the transmitted beam (as with direct de-tection systems) or in an equivalent manner by ad-justment of the local oscillator beam. This would be of
1396 APPLIED OPTICS / Vol. 18, No. 9 / 1 May 1979

significance if heterodyning was to be used in an inco-herent backscatter system used for area surveillance,i.e., where the instantaneous field of view is sizable andnot diffraction limited.
If the transmitted field pattern is identical to thereceiver acceptance pattern, i.e., if I is (/3 ) = AL (/) thesystem might be described as matched. A matchedsystem can be realized in practice by separating the l.o.beam from the transmitted beam with a beam splitterso that the (imaginary) backpropagated l.o. beam fol-lows the path of the transmitted beam. Such a systemwould, of course, employ a common transmit/receiveantenna, and it would be necessary to ensure that thel.o. profile is not truncated by the edges of the photo-detector. The integral in the mixing term [Eq. (24)]them becomes
I S () IAL L(O)d1- I s(0)I 2 dfl= I Ho(s/r)IfTfrUT(b)II 4 da(s/r), (47)
where use has been made of Eq. (21) and Parseval'stheorem. The antenna and heterodyne efficiencies aregiven, respectively, by
T1la = A LysU3)LRU3)d~ < 1 (48)
fJSI ) I 2d3
h I AS (. R ()d49)
The latter can be unity for returns from the transmitterfar field if uniform illumination of the transmitter isused so that I's() = fT(b)*fT(b)/AT = AR(I). Ingeneral however lh < 1; inspection of Eq. (41) indicatesthat the inefficiency is due to curvature mismatch aswell as profile mismatch in the transmitter near field.Matched systems appear to have no particular meritother than practical expediency.
For unmatched systems not dedicated to area sur-veillance, use of the aperture-limited l.o. profile enablesoptimum design of the receiver; according to the argu-ment in Sec. IV.B.4 w7d = 1 even if such a profile is pro-duced with an ancillary optical system, and, accordingto Sec. IV.B.2, 'lb = 1 provided the photodetector doesnot truncate the diffraction pattern profile. For to-pographic backscatter work the transmitter/receivergeometry can be designed to ensure that the scatteringsurface is in the far field of the transmitter, and 7a isoptimized (see Sec.IV.B.1); since this usually entails useof a relatively small scattering surface the assumptionthat the backscattering is uniform and extends acrossthe beam is probably not too restrictive. Similar con-siderations apply for atmospheric backscatter where thereturn from a specific range (e.g., from a plume) is to bestudied. For range surveillance lidar the discussion inSecs. IV.B.1 and IV.B.3 suggests that transmission ofthe nondiverging beam optimizes a at long range, re-moves the range dependence of 'la/r 2 in Eq. (46), andlimits the range dependence of 77c
As to the assumptions made in this paper, the pres-ence of aberrations in the receiver optics [which havebeen neglected in the expression for fR (b)] would clearlyreduce h, although one would not expect this to be se-rious for systems using aperture-limited beams. Axial
misalignment of the local oscillator beam24 -2 6 wouldhave a similar effect. The presence of atmosphericturbulence and, for atmospheric backscatter lidar, ofmultiple scattering, which tends to spread the trans-mitted beam will reduce the speckle element or coher-ence area [c.f. Eq. (35)] and therefore the output signal,although in the case of multiple scattering this shouldbe compensated by the increase in the effective crosssection. Conversely the presence of structure in thescattering surface so that the backscatter is not uniformwould tend to increase A. It seems likely that obser-vations of I s (/3 ), either directly or through the outputof a heterodyne receiver, could prove a useful source ofinformation on the physical parameters of the atmo-sphere.
To quantify the discussion given here, numericalcomputations are being made of the parameters intro-duced above for typical antenna geometries, and it isintended to publish these later.
This work was carried out as part of a contract withthe Commission of the European Communities Envi-ronmental Research Programme. I am grateful to E. L.Thomas for introducing me to this topic and to 0. 0.Andrade for persuading me to take an interest in partialcoherence.
Appendix A: Derivation of Eq. (1)
While this equation may be regarded as a standardresult (closely related expressions involving the geo-metrical factors being found, for example, in Refs. 6, 7,and 24), I have not been able to find them in the formpresented in the existing literature. It is thereforeconvenient to summarize the derivation as follows.
If a photoelectron is generated at position a, on thesurface of a photodetector at time t, the output currentis
it = eb(t - tB(a - al)dal.
In an optical field with scalar potential V(a,t), theprobability of such an electron being generated is3
p(a,t) = [/(hv)I(V*(a,t)V(a,t),
whence(it) = Sfitp(a,t)dadt
=-__ JR(al:al)da.hp AD)
(Al)
The irradiance JR (al:ai) defined here is a particularcase of the mutual intensity JR (al:a 2 ), which is in turna component of the mutual coherence function
(V*(ai,ti)V(a 2 ,t2 )) = r(1,2) = J(a:a 2 )g(t1:t 2 ). (A2)
The factorization into space- and time-dependent termsis the assumption of cross-spectral purity2 3; the tem-poral correlation function g(t1:t2 ) = g(ti - t2) = g(T) forstationary systems has the property that g(0) = 1.
The ac photodetector output power
(i2) = (t) - (it)2, (A3)
1 May 1979 / Vol. 18, No. 9 / APPLIED OPTICS 1397

which is given in Eqs. (4) and (5), also requires calcu-lation of the second moment (i2 ). Extending theabove, we have
i = e2b(t - t1 )6(t' - t2) ffb(a - al)b(a' - a 2)dada'
p(a,a',t,t') = (hi) V*(a,t) V*(a',t')V(a,t) V(a',t')).
Separating the single (a a', t t') and pair photo-electron terms gives
(it) = e () 5(hr) AD (1,1)d 2 a,
+; fAD fADJ r(1,2;1,2)dalda 2 , (A4)~hvI AD SAD
where r(l,2;l,2) = (V*(aiti) V*(a2,t 2)V(ai,ti)V(a2,t2 )).
In the heterodyne case the optical field is the sum ofthe (coherent) local oscillator term L and the receivedfield R, i.e., V(al,tl) = L(l) + R(l). On using the fac-torization properties of the mutual coherence function, 3
we have
r(1,1) = rL(1,1) + rR(l,l),
r(1,2:1,2) = rL(l,l)rL( 2,2 ) + rR(1,1)rR(2,2) + 2 rL(l,l)rR( 2 ,2 )+ 2 Re[rR (1,2) rL (2,1)] + I rR(1,2)1 2. (A5)
Substitution of Eqs. (Al), (A4), and (AS) in Eq. (A3)then gives the required results. It is assumed that L(1),L(2) >> R(1), R(2), and
rR(1, 2 )rL( 2 ,1) = JR(al;a2)JL(al;a2) I gS(Te) I w(),
where Jj(ai;a2) =gs(T) = Igs ) Icity 2' 3).
JL(a 2;al), gL(T) = exp(JULT) andexp(jwo-r) (quasi-monochromati-
Appendix B: Some Properties of CircularlySymmetric Convolutions
The convolution theorem of Hankel transforms19
written in the notation used here is
HIHyIg(x)!Hyth(x)! I g(x')*h(x')
= 3 f 3 g(x)h(lx'- x)dx'd0, (Bi)
where 0 = Z(x,x'). Since it is clear from the definitionof the Hankel transform [Eq. (10)] that
Hylg*(x) = H;yg(x)1,
it follows by putting h (x) = g* (x) that
H.-I Hy g(x)}II} = g(x')*g*(x'), (B2)
which is the equation used in deriving Eq. (21). Forcircularly symmetric functions the convolution g(x')*g* (x') is identical to the autocorrelation g(x')*g* (-x').Equation (B2) shows that such functions are real sincethe left-hand side is a Hankel transform of a real func-tion which must itself be real.
Integrals of the form
fg(xi)*h(x)dx = f g(x)h(lxl - xl)dxldodx
can be transformed by writing fdxldo = Sdxl and x1- x = X2 to yield
fg(x)*h(x)dx = fg(xl)h(x 2)dxidx 2 (B3)
Likewise
f(x)[g(x1)*h(xi)]dx = ff(x)g(xl)h(x 2)dxldx 2 (B4)
This result has been used in deriving Eq. (24) in thetext,
If in Eq. (B3) we put h(x2 ) = g*(x 2 ), then
fg(xl)*g*(xl)dx = fg(xl)dxlfg*(x 2 )dx 2 = I g(x)dxl 2, (B5)
which was used for the derivation of Eq. (31).
References1. This assumption is justified by the central limit theorem if there
are many particles in the scattering volume and if the signal issampled over times long compared with its coherence time.Relevant discussions in the cases where one of these assumptionis not valid are given, respectively, by E. Jakeman and P. N.Pusey, Phys. Rev. Lett. 40, 546 (1978) and by L. Mandel, Phys.Rev. 181, 75 (1969).
2. M. Born and E. Wolf, Principles of Optics (Pergamon, London,1964).
3. L. Mandel and E. Wolf, Rev. Mod. Phys. 37, 231 (1965).4. D. L. Fried, Proc. IEEE 55, 57 (1967).5. J. W. Goodman, Proc. IEEE 53,1688 (1965).6. A. T. Forrester, R. A. Gudmundsen, and P. E. Johnson, Phys. Rev.
99, 1691 (1955).7. H. Z. Cummins and H. L. Swinney, Prog. Opt. 8,123 (1970).8. A. E. Siegman, Appl. Opt. 5,1588 (1966).9. C. M. Sonnenschein and S. A. Horrigan, Appl. Opt. 10, 1600
(1971).10. J. J. Degnan and B. J. Klein, Appl. Opt. 13, 2397 (1974).11. B. J. Klein and J. J. Degnan, Appl. Opt. 13, 2134 (1974).12. B. J. Klein and J. J. Degnan, Appl. Opt. 15, 977 (1976).13. F. R. Arams, E. W. Sard, B. J. Peyton, and F. P. Pace, IEEE J.
Quantum Electron. QE-3, 484 (1967).14. A. T. Forrester, J. Opt. Soc. Am. 51, 253 (1961).15. All integrals in this paper are between extreme limits, i.e., -- and
, or 0 and - as appropriate, except for the double intergralswhich have been characterized by the area of integration andwhere otherwise specified.
16. B. J. Rye, "Basic Principles of Signal Acquisition in DAS SystemsEmploying Incoherent Backscatter," Hull University, Depart-ment of Applied Physics, Internal Report (January 1978).
17. E. Jakeman, C. J. Oliver, and E. R. Pike, Adv. Phys. 24, 349(1975).
18. F. Zernike, Physica V8, 785 (1938).19. See e.g., R. Bracewell, The Fourier Transform and its Applica-
tions (McGraw-Hill, New York, 1965).20. R. L. Byer, Opt. Quantum Electron. 7, 147 (1975).21. A. T. Forrester, Am. J. Phys. 24, 192 (1956).22. J. Harms, W. Lakmann, and C. Weitkamp, Appl. Opt. 17,1131
(1978).23. D. Fink, Appl. Opt. 14, 689 (1975).24. 0. 0. Andrade and B. J. Rye, J. Phys. D 7, 280 (1974).25. L. Mandel and E. Wolf, J. Opt. Soc. Am. 65, 413 (1975).26. S. C. Cohen, Appl. Opt. 14,1953 (1975).
1398 APPLIED OPTICS / Vol. 18, No. 9 / 1 May 1979