analysis of numerical inverse algorithms · analysis of numerical inverse algorithms in atmosphere...
TRANSCRIPT
Analysis of Numerical Inverse Algorithms in atmosphere remote sensing
Oleg Dubovik
Benjamin Torres, David Fuertes, Pavel Litvinov - LOA, CNRS– Université Lille, France
- GRASP-SAS, Villeneuve d'Ascq, France
IDEAS Workshop, Davos, Switzerland, 11-12 October, 2018
Analysis of fundamental assumptions and practical recommendations

Light scattering measured from ground and space
Phase Function P(Θ,λ)
-0.2
-0.1
0
0.1
0.2
0.3
0 40 80 120 160
-P12
/P11
Scattering Angle, degree
Polarization
Θ – scattering angle
Extinction τ(λ) 0.2
0.4
0.6
0.8
1
440 640 840 1040
Extin
ctio
nWavelength, nm
Incident beam
Scattered beam
Scattered beam
0.01
0.1
1
10
100
0 40 80 120 160
m1(λ), large particlesm2(λ), small particles
P11
Scattering Angle, degree
//
//
IIII
+
−
⊥
⊥
Θ =Θ0(!!!)
F(λ) ≈ F0(λ) e−
τ (λ )cos(Θ0 )
⎛
⎝
⎜⎜
⎞
⎠
⎟⎟
+ ...
Direct light
Diffuse light
Θ ≠Θ0(!!!)
F(λ) ≈ F0(λ) e−
τ (λ )cos(Θ0 )
⎛
⎝
⎜⎜
⎞
⎠
⎟⎟
P(Θ,λ)+ ...

NUMERICALINVERSIONStat.optimizedfittingoff*byf(ap)underaprioriconstraints
FORWARDMODELSimulatesobservationsf(ap)foragivensetofparametersap
Retrievedparameters:ap–describesopticalproperties
ofaerosolandsurface
Observationdefinition:Viewinggeometry,spectralcharacteristics;coordinates,etc.
Input:
Observationsf*
Inversionsettings:
-descriptionoferrorΔf*;-aprioriconstraints
f*
ap f(ap)
ap - final
General structure of the algorithm
INDEPENDENTMODULES!!!
GRASP

CONTENT 1. Atmospheric remote sensing as an inverse problem Primary linear problems; Essentially non-linear problems
2. Solving system of equations Matrix inversion solutions; linear iterative solutions; Solutions of non-linear systems Methods of constrained inversions - basic concept of overcoming solution instability 3. Statistical estimation concept Solving system of equation in the presence of noise in the data; Method of Maximum Likelihood
4. Least Squares Method
5. Methods of constrained inversions (for ill posed problems) Constrained inversions: Phillips–Tikhonov–Twomey , Kalman filter, Optimum estimations by Rogers, Bayesian statistics approach, etc 6. Including additional a priori information and Multi-Term Least Squares Method 7. Optimized solution of non-linear system of equations: Gauss–Newton and Quasi-Newton iterations, Levenberg–Marquardt iterations, Steepest-decent, etc. 8. Limitations of “statistical estimation”: A priori constraints on solution non-negativity, Accounting for effect of “redundant observations” 9. General recommendations, remote sensing applications, the GRASP algorithm 10. Introduction to assimilation and inverse modeling
“METHODS OF NUMERICAL INVERSION IN ATMOSPHERIC REMOTE SENSING AND INVERSE
MODELING: AN INTRODUCTION”

Inverse Problem: Retrieval of particle size distribution
from light scattering 0.01
0.02
0.04
0.05
0.07
0.1 1 10
dV/d
lnR
(µm
3 /µm
2 )
Radius (µm)
?
P(λ;Θ) = K λ;Θ;n,k,..( )dV r( )
drrmin
rmax
∫ dr
Fa = f * - to solve ???

⌢a = F1
TC1−1F1( )
−1F1
TC1−1f1
*
€
⌢ a = FTCf−1F + Ca
−1( )−1
FTCf−1f * + Ca
−1 a*( )
⌢a = FTF+ γI( )
−1FTf *
⌢a = FTCf
−1F+ γSTS( )−1
FTCf−1f *( )
ai
p+1 = aip 1 + f j
* f jp − 1( ) !Fji( )
j=1
Nf
∏
ai
p+1= ai
p fi
∗fip"
#$$
%
&''
Which approach to use?
- MML
- LSM
- « Optimal estimations », C. Rodgers
- Kalman filter
- Tikhonov Regularization
- Phillips-Tikhonov-Twomey
- Twomey-Chahine
- Chahine
- Steepest Desent Method
Assimilation, 4DVR SVD, gradient methods, etc.

Base idea of inversion
f1*
f2*
!
"
##
$
%
&&=
F11F21
F12F22
!
"
##
$
%
&&
a1a2
!
"
##
$
%
&&
f1*
f2*
f3*
!
"
####
$
%
&&&&
=
F11 F12F21 F22F31 F32
!
"
####
$
%
&&&&
a1a2
!
"
##
$
%
&&
F
f *
a
⌢a = FTF( )−1FTf *
⌢a = F( )−1f *
- parameters of size distribution F
f *
asquare
rectangular
Least Square Method - LSM
???
€
f1*
f2*
f3*
"
#
$ $ $ $
%
&
' ' ' '
=
F11 F12
F21 F22
F31 F32
"
#
$ $ $
%
&
' ' '
a1
a2
"
# $
%
& ' +
Δ1
Δ2
Δ3
"
#
$ $ $
%
&
' ' '
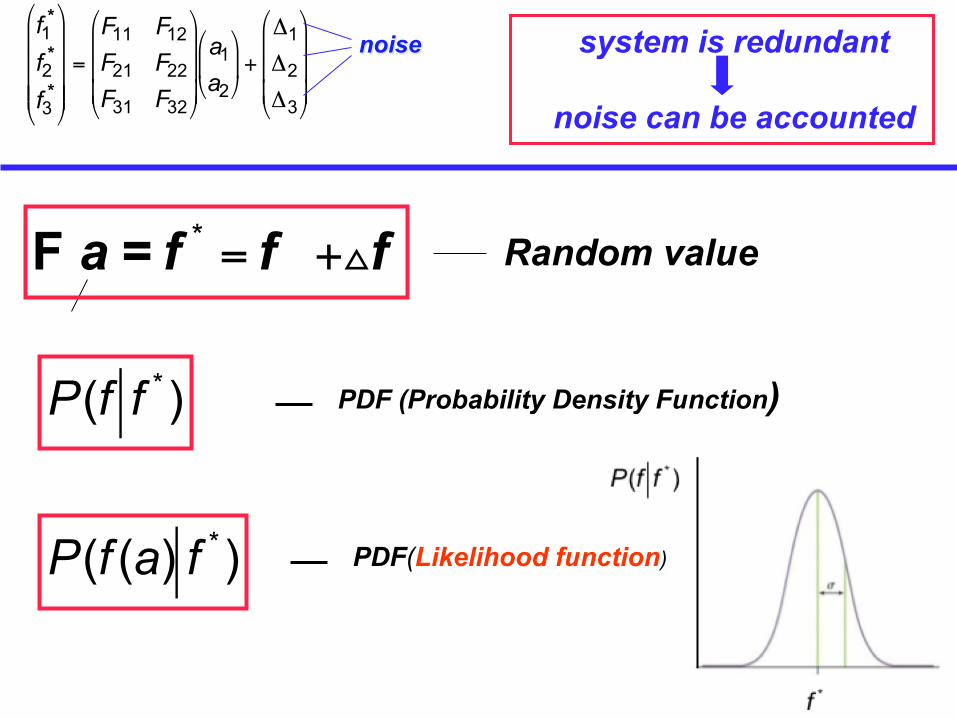
Random value
noise system is redundant
noise can be accounted
F a = f * = f +△f
PDF(Likelihood function)
P(f f * ) PDF (Probability Density Function)
P(f (a) f * )
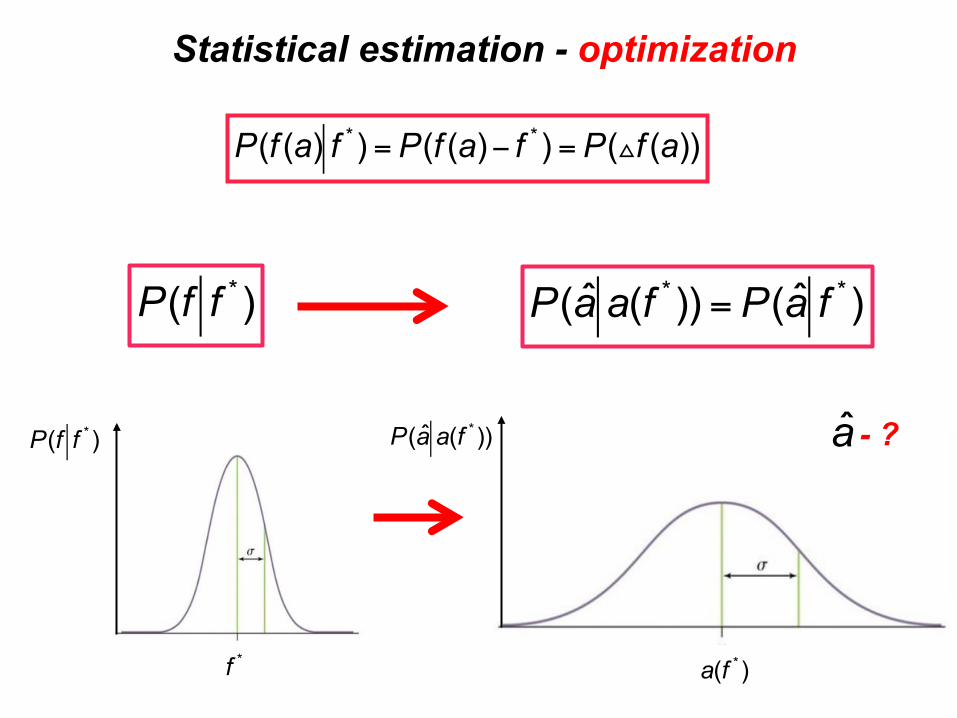
P(f f * )
f*
P(a a(f * ))
a(f * )
P(f f * )
P(a a(f * )) = P(a f * )
Statistical estimation - optimization
P(f (a) f * ) = P(f (a)− f * ) = P(△f (a))
a - ?

sufficient – no more information can be obtained from f* consistent: unbiased: optimal – has highest formation from f*1,...,f*N effective – has highest possible formation from f*1,...,f*N jointly effective: – simultaneously have highest possible formation from f*1,...,f*N
€
f1*
f2*
f3*
"
#
$ $ $ $
%
&
' ' ' '
=
F11 F12
F21 F22
F31 F32
"
#
$ $ $
%
&
' ' '
a1
a2
"
# $
%
& ' +
Δ1
Δ2
Δ3
"
#
$ $ $
%
&
' ' '
noise
N= 3,4, … limited N= ∞
Properties of : a
a N→∞⎯ →⎯⎯ atrue
a
N= atrue
a1,a2,...,ak

sufficient – no more information can be obtained from f* (Darmois theorem: ~possible only for exponential PDF, i.e. N=∞) consistent: unbiased: optimal – has highest formation from f*1,...,f*N effective – has highest possible formation from f*1,...,f*N jointly effective: – simultaneously have highest possible formation from f*1,...,f*N
€
f1*
f2*
f3*
"
#
$ $ $ $
%
&
' ' ' '
=
F11 F12
F21 F22
F31 F32
"
#
$ $ $
%
&
' ' '
a1
a2
"
# $
%
& ' +
Δ1
Δ2
Δ3
"
#
$ $ $
%
&
' ' '
noise
N= 3,4, … limited N= ∞
N è∞, asymptotic
Properties of : a
a N→∞⎯ →⎯⎯ atrue
a
N= atrue
a1,a2,...,ak

Something to do with ?
Information Quantity: - ???
Information Quantity:
P(a f * )
P(a a(f * ))
a(f * )
The narower P(a) around atrue the better
P(atrue = ʹa )−P(a) The smaller the better

lnP(a) = lnP( ʹa )+ ∂lnP
∂a a= ʹa
(a− ʹa )+ 12∂2lnP∂a2
a= ʹa
(a− ʹa )2 + ...(a− ʹa )3 + ...
lnP(a)− lnP( ʹa ) = ∂lnP
∂a a= ʹa
(a− ʹa )+ 12∂2lnP∂a2
a= ʹa
(a− ʹa )2 + ...(a− ʹa )3 + ...
0
Taylor expansion in vicinity of atrue
The narrowest P(a)

lnP(a) ≈ lnP( ʹa )+ 1
2∂2lnP∂a2
a= ʹa
(a− ʹa )2
P(a) ∼ e12∂2 lnP∂a2
⎛
⎝⎜⎜
⎞
⎠⎟⎟(a− ʹa )2
⎛
⎝⎜⎜
⎞
⎠⎟⎟= e
−12
(a− ʹa )2
σ a2
= e
−12
(a− ʹa )2
−∂2 lnP∂a2
−1
−∂2lnP∂a2
⎛
⎝⎜
⎞
⎠⎟P da = −
∂lnP∂a
⎛
⎝⎜
⎞
⎠⎟
2
P da =∫ 1σ a
2∫
Fisher Information
σ a
2= −
∂2 lnP∂a2
−1
Smallest possible

2. Shannon Information:
Fisher Information:
Information Quantity:
1.
h P a( )( ) = −∂ 2lnP a f( )
∂ a2
⎛
⎝
⎜⎜
⎞
⎠
⎟⎟∫ P a f( )df
h P a( )( ) = −log2 P a f( )( )∫ P a f( )df →Nbits
Nbits- number of bits (binary digits) needed to represent the number of distinct estimates that could have be obtained
Gauss Probability Function
P(C
)
<C>
<ΔC2>1/2
€
Nsymbols ~ 2Nbits
Information Quantity:

2. Shannon Information:
Fisher Information:
Information Quantity:
1.
h P a( )( ) = −∂ 2lnP a f( )
∂ a2
⎛
⎝
⎜⎜
⎞
⎠
⎟⎟∫ P a f( )df = 1
Δa2
min
h P a( )( ) = −log2 P a f( )( )∫ P a f( )df =Nbits = f (−log2(σ ))
Nbits- number of bits (binary digits) needed to represent the number of distinct estimates that could have be obtained
Gauss Probability Function
P(C
)
<C>
<ΔC2>1/2
€
Nsymbols ~ 2Nbits
Information Quantity:
P a( ) = 1
2πσ 2e−
12
(a− ʹa )2
σ 2

∂lnP(a)∂a a= ʹa
= 0
lnP(a)− lnP( ʹa ) = ∂lnP
∂a a= ʹa
(a− ʹa )+ 12∂2lnP∂a2
a= ʹa
(a− ʹa )2 + ...(a− ʹa )3 + ...
0
MML (Method of Maximum Likelihood)
P(a
MML) ∼ e
−12
(a− ʹa )2
σ a2
= e
−12
(a− ʹa )2
−∂2 lnP∂a2
−1
σ a
2= Ia,Fisher( )−1
Smallest possible

∇ lnP(a)
a= 0 MML for several unknowns
P(a
MML) ∼ e
−12
(Δa)T Ca−1(Δa)
= e - 1
2 (Δa)T IFisher (Δa)
Fisher Information Matrix
IFisher{ }
ij= −
∂lnP a( )∂ai
∂lnP a( )∂aj
⎛
⎝⎜⎜
⎞
⎠⎟⎟∫ P a f( )df

Statistical Optimization
Cramer-Rao inequalityg - a characteristic linearly dependent on a
i.e. g = g1a1 + g2a2+… = g Ta, g - a vector of coefficients)
σ g
2 = g CagT ≥ g Ca,MMLg
T = g IFisher( )−1
gT
Smallest possible
aMML=(a1, a2,...)T – jointly effective !!!
Very important in practice

Optimality of MML:
aMML - asymptotically sufficient
aMML - asymptotically Normally distributed vector
aMML - asymptotically jointly effective (most accurate!)
aMML - asymptotically the best
Statistical Optimization
Ca, MML = IFisher( )
−1

Optimality of LSM: for Δf is Normal: aLSM = aMML
if Δf is not Normal: - aLSM has the smallest variance among all unbiased linear estimators (Gauss-Markov theorem)- aLSM asymptotically Normal
if P (...) Gaussian, MML = MLS
Statistical Optimization
∇Ψ a( ) =∂Ψ a( )∂ai
= 0, (i =1,..,Na) Ψ a( ) = 1
2(f a( )− f∗)TC−1(f a( )− f∗) =min
⌢a = F1
TC1−1F1( )
−1F1
TC1−1f1
* Δf – Normal => Δa - Normal

LSM vs MML:
For Normal noise: aLSM = aMML For linear case: - aLSM has smallest variance among unbiased estimators; - aMML has smallest variance (asymptotically effective); - both asymptotically Normal For non-linear case: - aMML has smallest variance (asymptotically effective); - both asymptotically Normal - In practice aMML is often implemented as non-linear LSM,
i.e. aMML ≈ aLSM
Statistical Optimization
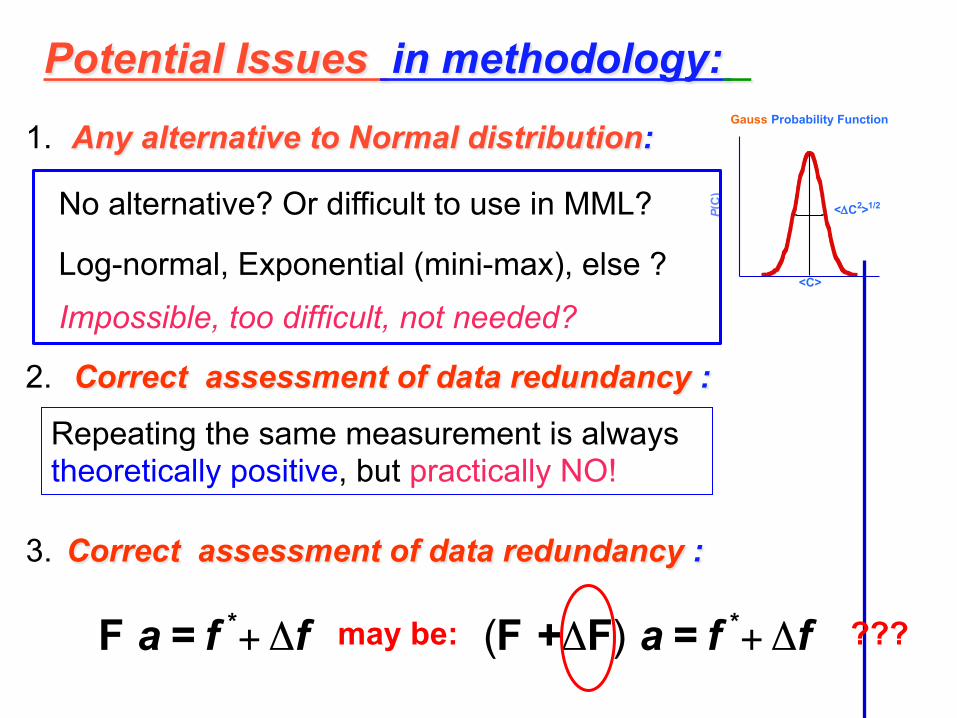
2. Correct assessment of data redundancy :
Any alternative to Normal distribution:
Potential Issues in methodology:
1. Gauss Probability Function
P (C
)
<C>
<ΔC2>1/2
Information Quantity:
No alternative? Or difficult to use in MML?
Log-normal, Exponential (mini-max), else ?
Impossible, too difficult, not needed?
Repeating the same measurement is always theoretically positive, but practically NO!
3. Correct assessment of data redundancy :
(F +ΔF) a = f *+ΔfF a = f *+Δf may be: ???

Non-negativity of solution
Convergence, Smoothness
f * =F a +Δf Normal
ai
p+1 = aip 1 + f j
* f jp − 1( ) !Fji( )
j=1
Nf
∏ ai
p+1= ai
p fi
∗fip"
#$$
%
&''
- Twomey-Chahine - Chahine
Δa = F1
TC1−1F1( )
−1F1
TC1−1△f1
* LSM
a - Can be negative
symmetric

Non-negativity of solution
(Dubovik and King 2000, Dubovik 2004)
Convergence, Smoothness
f * =F a +Δf
ln(f * ) = ln(F a)+ lnΔf
Log - Normal
Normal
(for positively defined values e.g. Tarantola 1987)
Normal for additive errors Log-Normal for multiplicative errors

Non-negativity of solution
(Dubovik and King 2000, Dubovik 2004)
LSM in log Space
Newton Gauss Levenberg- Marquardt …
Convergence, Smoothness
f * =F a +Δf
ln(f * ) = ln(F a)+ lnΔf
ap+1 = ap − DTC−1D( )
−1C−1DTΔ lnf p
Log - Normal
Normal
Normal △a ???

Non-negativity of solution
(Dubovik and King 2000, Dubovik 2004)
LSM in log Space
Newton Gauss Levenberg- Marquardt
Convergence, Smoothness
f * =F a +Δf
ln(f * ) = ln(F a)+ lnΔf
lnap+1 = lnap − UTC−1U( )
−1C−1UTΔ lnf p
Log - Normal
Normal
△lnap Normal △aLog - Normal

P(f f * )
f*
P(a a(f * ))
a(f * )
P(f f * )
P(a a(f * )) = P(a f * )
Statistical estimation - optimization
P(f (a) f * ) = P(f (a)− f * ) = P(△f (a))
a - ?

Optimality of MML:
aMML - asymptotically sufficientaMML - asymptotically Normally distributed vectoraMML - asymptotically jointly effective (most accurate!)
Statistical Optimization
f* = f a( ) +Δf
Conditions:
df a( )da
a
derivatives exist and limited in whole range of variability
- physical function
a ∈ −∞;+∞⎤⎦ ⎡⎣ f ∈ −∞;+∞⎤⎦ ⎡⎣

Derivations are in Dubovik and King 2000
Convergence, Smoothness
ln ⌢ap+1 = ln ⌢ap − tp UTC−1U+γp I( )
−1UTC−1Δ lnf p
Levenberg – Marquardt ~ Newton - Gauss
∞
ln ⌢ap+1 = ln ⌢ap − tpUTC−1Δ lnf p
Steepest decent
ai
p+1 = aip 1 + f j
* f jp − 1( ) !Fji( )
j=1
Nf
∏ ai
p+1= ai
p fi
∗fip"
#$$
%
&''
- Twomey-Chahine - Chahine

Potential issue: Optimality of MML:aMML - asymptotically jointly effective (most accurate!)
Statistical Optimization
Ca, MML = IFisher( )
−1 Smallest possible
What if: too large? or ?
det IFisher( )→ 0
Ca, MML
Additional constraints are needed!

~ exp −12Δf1
TΔf1σ 2
!
"##
$
%&& =max
2. Multi-Source Data:
1. One set of input data:
LSM for multiple data sets: P (...) - Probability Density Function (Likelihood)
P
P1,2,3=P1P2P3…~ exp −
12σ1
2
σ12
σ i2Δfi
TΔfi( )i∑
"
#$$
%
&'' =max
σ12
σ i2Δfi
TΔfi( )i∑ =min
where ∆i = fi*- fi(a) and fi
*- measurements or a priori data
Statistical Optimization
ΔfiTΔfi( )σ12
=min

f1* =F1 a+Δ1
f2* =F2 a+Δ2...
"
#$$
%$$
Independent !!!
€
⌢ a = F1TC1
−1F1 +F2TC2
−1F2 + ...( )−1F1
TC1−1f1
* +F2TC2
−1f2* + ...( )
sensor 1 sensor 2
f1• = f * =F a +Δf
f2• = a* = a +Δa
f3• = 0 * = Sa +Δ(Δa)
"
#$$
%$$
sensor
a priori
⌢a = FTCf
−1F+Ca−1 + γSTS( )
−1FTCf
−1f * +Ca−1a*( )
Multi-Term LSM Multi-sensor data
Single-sensor data
Generalization of “Optimum estimation” and Phillips-Tikhonov-Twomey formulas
(e.g. see Dubovik 2004)

Inverse Problem: Retrieval of particle size distribution
from light scattering 0.01
0.02
0.04
0.05
0.07
0.1 1 10
dV/d
lnR
(µm
3 /µm
2 )
Radius (µm)
?
P(λ;Θ) = K λ;Θ;n,k,..( )dV r( )
drrmin
rmax
∫ dr
Fa = f *
2) How to solve ???
1). how to define ???

CONTENT 1. Atmospheric remote sensing as an inverse problem Primary linear problems; Essentially non-linear problems
2. Solving system of equations Matrix inversion solutions; linear iterative solutions; Solutions of non-linear systems Methods of constrained inversions - basic concept of overcoming solution instability 3. Statistical estimation concept Solving system of equation in the presence of noise in the data; Method of Maximum Likelihood
4. Least Squares Method
5. Methods of constrained inversions (for ill posed problems) Constrained inversions: Phillips–Tikhonov–Twomey , Kalman filter, Optimum estimations by Rogers, Bayesian statistics approach, etc 6. Including additional a priori information and Multi-Term Least Squares Method 7. Optimized solution of non-linear system of equations: Gauss–Newton and Quasi-Newton iterations, Levenberg–Marquardt iterations, Steepest-decent, etc. 8. Limitations of “statistical estimation”: A priori constraints on solution non-negativity, Accounting for effect of “redundant observations” 9. General recommendations, remote sensing applications, the GRASP algorithm 10. Introduction to assimilation and inverse modeling
“METHODS OF NUMERICAL INVERSION IN ATMOSPHERIC REMOTE SENSING AND INVERSE
MODELING: AN INTRODUCTION”

€
f1* = F1 a + Δ1
f2* = F2 a + Δ2
...
#
$ % %
& % %
Independent !!!
€
⌢ a = F1TC1
−1F1 +F2TC2
−1F2 + ...( )−1F1
TC1−1f1
* +F2TC2
−1f2* + ...( )
sensor 1 sensor 2
f * =F a +Δf
a* = a +Δa
"#$
%$
sensor
a priori
€
⌢ a = FTCf−1F + Ca
−1( )−1
FTCf−1f * + Ca
−1 a*( )
Multi-Term LSM Multi-sensor data
Single-sensor data
“Optimum Estimations” by Rodgers, Levenberg-Marquardt Maximum Entropy Method, Kalman Filter …, 4D Variational Assimilation (4DVR), … Assimilataion
(e.g. see Dubovik 2004)

Multi-Term LSM
smoothness
⌢a = FTCf−1F+Ca
−1( )−1FTCf
−1f * +Ca−1 a*( )
However:
f1• = f * =F a+Δff2• = 0 * = Sa +Δ(Δa)
"#$
%$
sensor
⌢a = FTCf−1F+STC0*
−1S( )−1FTCf
−1f *( )
Ca−1 = STC0*
−1S and a* = 0 *
det(STC0*−1S) = 0 Ca = ???
Identity ???
Optimal estimations
A priori smoothness constraints

f1* =F1 a+Δ1
f2* =F2 a+Δ2...
"
#$$
%$$
Independent !!!
€
⌢ a = F1TC1
−1F1 +F2TC2
−1F2 + ...( )−1F1
TC1−1f1
* +F2TC2
−1f2* + ...( )
sensor 1 sensor 2
f1• = f * =F a +Δf
f2• = a* = a +Δa
f3• = 0 * = Sa +Δ(Δa)
"
#$$
%$$
sensor
a priori
⌢a = FTCf−1F+Ca
−1 +STC0*−1S( )
−1FTCf
−1f * +Ca−1a*( )
Multi-Term LSM Multi-sensor data
Single-sensor data
Generalization of “Optimum estimation” and Phillips-Tikhonov-Twomey formulas
(e.g. see Dubovik 2004)

Non-linear inversion
Levenberg – Marquardt Ψ(a)
a - solution
a0 – initial guess
⌢ap+1 = ⌢ap − tp FTC−1F+γp I( )
−1FTC−1Δ lnf p
⌢ap+1 = ⌢ap − FTC−1F( )−1FTC−1Δ lnf p Δ
⌢ap - incorrect
Newton - Gauss

Independent !!!
Δ⌢a = F1
TC1−1F1 +F2
TC2−1F2 + ...( )
−1F1
TC1−1Δf1
* +F2TC2
−1Δf2* + ...( )
Δf1p =Fp Δap +Δ1
mes +Δ1linearizaion ap( )
0* = Δap +Δa*
"#$
%$
sensor
a priori
Multi-Term LSM
Levenberg-Marquardt
(e.g. see Dubovik 2004) f1 a( ) - nonlinear
Δ⌢ap = FTCf
−1F+Ca∗−1( )
−1FTCf
−1Δf * Δ⌢ap = ⌢ap −
⌢ap+1
⌢ap+1 = ⌢ap − FTF+γp I( )−1FTΔf p
γ p =εlineraization2
εa2
⎛
⎝⎜⎜
⎞
⎠⎟⎟ p→∞⎯ →⎯⎯ 0
ε lineraization
2 ~ Δf p( )TΔf p( ) − residual
Ca∗= I ε2
IDEAS + Cal/Val Workshop, Lille, France, April 6-7, 2017