algebra linear v07042011
TRANSCRIPT
Parte I
Álgebra Linear
1
Capítulo 1
Introdução
Estas Notas de Aula, Parte I - Álgebra Linear, estão sendo elaboradas para a disci-plina de Álgebra Linear do curso de Ciências Econômicas da Universidade Federalda Integração Latino-Americana (UNILA). Consistem de um exercício de prepara-ção de aula e devem ser utilizadas pelos alunos somente como um guia para seusestudos. De forma alguma, os alunos devem utilizar estas notas como única fonte deestudo. Para ser claro, os alunos devem, para cada conteúdo programático, buscarna literatura recomendada (bem como em outras fontes) textos e exercícios sobre osconteúdos. Consulte o Plano de Ensino da disciplina para maiores detalhes sobre ocurso.
Em seguida, apresenta-se algumas discussões sobre matemática e suas aplicaçõesem economia. O texto a seguir é baseado no livro “Foundations Mathematical andComputational Economics” de Karman Dakhah [6].
1.1 O que é a matemática?
O que é a matemática? Certamente, esta não é uma resposta simples de ser res-pondida. De fato, existem mais de uma resposta. Muitos poderiam responder quea matemática é o que os matemáticos estudam que, por sua vez, é decido pelosmatemáticos. Muitos destes e outros tantos poderiam dizer que é uma das criaçõesmais belas da humanidade. Bem, seja qual for a resposta, ela me parece no mínimoincompleta. Por exemplo, o que são os matemáticos (não sejamos retóricos)? Ou, amatemática é uma criação ou uma descoberta humana?
Seja qual a resposta, podemos pelo menos identificar algumas caracteríscas damatemática ou, pelo menos, o que os ditos matemáticos estudam. A maior parteda matemática consiste de pensamento lógico. Podemos dividi-la em três partes:definição, pensamento lógico e axioma.
Definição dos conceitos e objetos é uma característica indispensável da matemá-tica. Para termos uma discussão lógica, todos devemos falar a mesma língua. Ouseja, uma expressão ou uma afirmação deve ter o mesmo significado para todos nós.Uma definição deve ser precisa, no sentido de incluir, sem sobra de dúvida, todos osseus itens necessários e excluir todos os demais. Entretanto, em todos os ramos damatemática encontramos um conjunto de conceitos que são muito fundamentais oubásicos para serem definidos. Por exemplo, na geometria, ponto e linha são fraca-
2

mente (vagamente) definidos. Outros exemplos, são as definições de número naturale conjunto. Nós assumimos que todos estão bastante informados sobre do que setrata. Todo conceito deve ser definido em termo de outros conceitos ou objetos.Não podemos começar do nada e desejamos criar um conjunto de definições signifi-cativas. Desta maneira, chegamos, por exemplo, na vontade de definir o significadodo número um.
O pensamento lógico é, certamente, a maior parte do trabalho matemático. Con-siste em partir de hipóteses e derivar implicações delas. Toda afirmação segue logi-camente de outra. Ou seja, não se consegue na da matemática que já não esteja nela.Pode-se fazer uma boa analogia com a natureza. Isso se você estiver de acordo deque na natureza nada se cria, tudo se transforma! Para exemplificar, consideremosa solução da seguinte equação de segundo grau:
ax2 + bx+ c = 0 (1.1)
onde, a, b, c são números reais dados (ou seja, hipoteticamente conhecidos), coma 6= 0, e queremos descobrir (ou, calcular) o valor de x de forma a satisfazer estaequação. Bom, você deve estar lembrado que
x =b±
√b2 − 4ac
2a. (1.2)
Agora, isso não é uma invenção criada do nada. Quando temos uma equação, istosignifica que ambos os lados dela estão equilibrados. Se fizermos qualquer operaçãode um lado da equação, devemos fazer a mesma operação do outro lado, de formaa não comprometer o balanceamento (imagine uma balança antiga!). Ok, vamospensar logicamente ...
ax2 + bx+ c = 0 ⇒ ax2 + bx+ c
a=
0
a
⇒ x2 +b
ax+
c
a= 0
⇒ x2 +b
ax+
c
a− c
a= − c
a
⇒ x2 +b
ax = − c
a.
Certo, agora vamos completar os quadrados
x2 +b
ax = − c
a⇒ x2 + 2
b
2ax+
(b
2a
)2
= − c
a+
(b
2a
)2
⇒(
x+b
2a
)2
= − c
a+
(b
2a
)2
⇒(
x+b
2a
)2
= − c
a− b2
4a2
⇒(
x+b
2a
)2
=b2 − 4ac
4a2.
3
Agora, se removêssemos os quadrados, teríamos uma equação muito simples pararesolver. Portanto, não percamos mais tempo, usemos a operação raiz quadrada, ouseja:
(
x+b
2a
)2
=b2 − 4ac
4a2⇒√(
x+b
2a
)2
= ±√
b2 − 4ac
4a2
⇒ x+b
2a=
√b2 − 4ac
a
⇒ x+b
2a− b
2a= ±
√b2 − 4ac
2a− b
2a
⇒ x =−b±
√b2 − 4ac
2a
Opa, isso não é mágica, é penas álgebra básica usada de maneira lógica!Bem, depois desta simbologia toda alguém pode estar se perguntando: e esse
monte de símbolos e letras ... isso não é matemática? Primeiro, o uso de símbolossurgiu com os estudos sistemáticos de matemática feito pelos gregos e alguma ho-menagem deve ser prestada aos pioneiros. Segundo, o uso de símbolos economizapapel (para ser politicamente correto), mas sobretudo economiza a escrita e torna oentendimento matemático mais simples. Aqui, deixo um exercício para os que nãoacreditam em tudo o que lêem. Repita o desenvolvimento lógico acima utilizandoapenas a sintaxe português (se preferir, faça-o em espanhol).
Já que falamos de exercício, é importante ressaltar que só se adquire prática ma-temática exercitando. Isso não é diferente de nenhuma outra ciência. Um bom exer-cício é repetir o desenvolvimento acima, partindo da última equação até chegarmosna equação original. Isso é lógico? Outro exercício, este é o único desenvolvimentológico para este problema? Mais um, a expressão algébrica encontrada para x é aúnica válida? Pense em um exercício que se poderia estabelecer sobre a equação desegundo grau.
Agora, voltemos a nossa discussão. O pensamento lógico por si só, não é suficientepara criar toda a matemática. Ele apenas deriva implicações sobre hipóteses feitasanteriormente (não cria nada, apenas transforma). Do nada não se pode derivaralguma coisa. Daí, a necessidade dos axiomas. Todo o campo da matemáticacomeça de um conjunto de axiomas que não se pode (ou pelo menos não se sabecomo) demonstrar, ou seja, não é uma derivação lógica de demais definições. Nósassumimos que tais axiomas são evidentes ou, pelo menos, tratamo-os desta forma.Um exemplo de um axioma em geometria é: existe apenas uma linha reta que passapor dois pontos distintos. Em aritmética, dizemos que existe o número 1 (um) e quetodo o número natural a diferente de 1 tem um sucessor a+ 1.
Os axiomas surgem de nossa experiência, de nossas observações e intuições domundo. Eles parecem ser evidentes. Observemos que um axioma requer a defini-ção de vários conceitos. Nos exemplos acima, precisamos definir o que são pontose números. Mais ainda, axiomas podem ser modificados, gerando um campo novoda matemática ou não tendo implicações substanciais. Na geometria, o exercíciode modificar o conjunto de axiomas euclidiano fez surgir novos ramos da geome-tria, como a geometria hiperbólica e a geometria elíptica (chamadas de geometria
4
não-euclidianas). Tais geometrias foram fundamentais no desenvolvimento de te-orias físicas, para citar um exemplo. É importante observar, que cada axioma deum conjunto de axiomas não compete com nenhum outro axioma deste conjunto,caso contrário, nós teríamos uma contradição lógica. Contradições lógicas não sãopermitidas na matemática. Pois, como já dizemos, a matemática segue estritamenteas regras da lógica para deduzir uma proposição a partir de hipóteses.
Toda afirmação matemática é ou verdadeira, ou falsa (não pode ser verdadeirae falsa ao mesmo tempo). Isso não significa que a matemática pode sempre dizerse uma afirmação é verdadeira ou falsa. Podemos e, muitas vezes afirmamos, quenada pode ser dito sobre uma afirmação. Por exemplo, é fácil mostrar que a somade dois números naturais é sempre um número natural. Entretanto, nada podemosdizer sobre a subtração de dois números naturais. Este nada, significa que pode serum número natural ou não.
Economistas nunca devem procurar respostas na matemática sobre questões quenão podem ser decididas.
1.2 Matemática na economia (e vice versa)
O que poderíamos chamarmos de economia matemática não é um campo da econo-mia no sentido como finanças públicas e mercado internacional são. É uma ferra-menta para análise econômica que os economistas usam como um suporte racional.Ferramentas matemáticas são utilizadas tanto em teorias micro ou macroeconômi-cas, finanças públicas, economia urbana, entre outras.
O campo da economia utiliza, em muitas análises, diversas técnicas matemáticasde vários campos da matemática, como por exemplo, algebra linear (matricial),cálculo diferencial e integral, equações diferenciais, etc. É proposta deste curso,introduzir os aspectos mais fundamentais da álgebra linear buscando, sempre quepossível, a intersecção com a corrente literatura em economia.
A uso de matemática em teorias econômicas é uma realidade no sentido de quemuitos economistas não aceitam (ou, permanentemente buscam) uma demonstra-ção matemática para as teorias econômicas. Alguns, e muitos o fazem, poderiam seperguntar qual é o problema. Primeiro, lembremos que o uso ou não de símbolosmatemáticos não define a aplicação ou não da matemática. Agora, o uso da ma-temática está na dedução lógica de proposições (afirmações) a partir de hipóteses.Um pensamento matemático iria, por exemplo, dizer: se as tais hipóteses são verda-deiras, então podemos afirmar tal coisa. Para isso não se precisa necessariamente desímbolos matemáticos, se forem usados é apenas para facilitar! Nem todos precisamconcordar com isso. Mas, fundamentalmente, as hipóteses são fruto da experiência(do estudo) de economistas. Aqui é a fronteira entre a matemática e a economia.
Bom, chegando neste ponto, alguém poderia perguntar o porque é necessária iralém da simples geometria. A resposta está no fato de que a geometria é uma pode-rosa ferramenta visual de análise, entretanto está limitada por nossa capacidade devisualizar muitas dimensões. Traçar uma reta no espaço bidimensional é um tantosimples. No espaço tridimensional, podemos utilizar nossa capacidade de interpretarprojeções bidimensionais, ou seja, representamos uma reta no espaço tridimensionalpor sua projeção no espaço bidimensional. Em dimensões mais altas, fica no mí-
5
nimo mais complicado. Para lidar com estes casos mais gerais, nós precisamos deferramentas mais flexíveis, como a álgebra linear. Isto deveria ser suficiente paramotivar o estudo de métodos matemáticos além da geometria.
Dito tudo isso, podemos apontar para algumas vantagens em utilizar matemáticana economia:
• a “linguagem” utilizada é mais precisa e concisa;
• existe um rico conjunto de teoremas matemáticos para serem explorados eutilizados;
• a exigência de estabelecer hipóteses explícitas, ajuda a diminuir a adoção desuposições implícitas e, por consequência, clarifica as restrições de cada teoria;
• permite a análise de muitas variáveis de forma integrada.
Bem, antes de começarmos o estudo de fato de álgebra linear, devemos fazer umrápida revisão de conceitos de matemática elementar.
6
Capítulo 2
Matemática Elementar
Toda a teoria é uma abstração do mundo real, ela está sempre sujeita a nossa limi-tação de observação. Assim, um procedimento razoável (e talvez o única possível)é identificar os fatores e relações relevantes (os que pudermos identificar e analisar)de nosso problema alvo e nos focarmos apenas neles. Esta simplificação deliberadaé chamada de modelo, é apenas um esqueleto do todo que buscamos estudar.
O texto deste capítulo é fortemente baseado no livro “Fundamental Methodsof Mathematical Economics” de Alpha C. Chiang e Kevin Wainwright [5]. Comoleitura complementar, o leitor é recomendado a leitura do Capítulo 2, seções 2.1 e2.2 do livro “Matemática para Economistas” de Carl P. Simon e Lawrence Blume[17].
2.1 Ingredientes de um modelo matemático
Um modelo econômico (ou de qualquer outra área) é meramente uma teorização doobjeto de estudo, não nenhuma razão intrínseca para ser um modelo matemático.Entretanto, se for um modelo matemático, ele consiste comumente de um conjuntode equações tomadas para descrever a estrutura do modelo. O tipo de equações eas restrições a suas variável dão forma ao conjunto de hipóteses analíticas adotadas.Então, para buscarmos por soluções para o conjunto de equações (ou seja, encontraros possível valores das variáveis que satisfazem as equações, se existirem), devemosutilizar do pensamento lógico que siga as hipóteses assumidas.
2.1.1 Variáveis, constantes e parâmetros
Uma variável é algo (um objeto) que pode mudar de magnitude e/ou direção, algoque pode assumir diferentes valores. Variáveis fequentemente utilizadas em economiasão: preço, lucro, custo, rendimento, consumo, investimento, índices de importaçãoe exportação, etc. Uma vez que variáveis podem assumir diferentes valores, devemosusar um símbolo que representá-las ao invés de um número específico. Por exemplo,podemos representar o preço por P , o lucro por L, o custo por C, o consumo por α.Quando escrevemos P = 3, por exemplo, estamos fixando um valor para a variávelpreço. Não podemos esquecer da unidade (preço em reais, por exemplo).
7
Em um modelo econômico/matemático, busca-se resolver-lo (ou analisar-lo) paraencontrarmos valores que sejam solução do problema. Por exemplo, podemos terum modelo para o lucro de uma determinada produção e buscarmos quais valorespara o modelo nos permite alcançar o lucro máximo.
Uma constante tem magnitude (e direção) que não muda. Quando um cons-tante aparece junto de uma variável ela, normalmente, é chamada de coeficiente davariável. Entretanto, um coeficiente pode ser simbólico ao invés de numérico.
Por exemplo, podemos dizer que a é uma constante e escrevemos aP (a vezesP ). Neste caso, a é o coeficiente da variável P . Isto nos permite uma maior gene-ralidade no sentido de que a não é um número determinado, apenas deve sermpreser determinado antes de resolver um modelo aplicado a uma situação particular.Quando definimos um valor para um coeficiente, comumente chamamos o coeficientede parâmetro.
Por simples convenção, usamos os símbolos a, b, c e suas respectivas formas gregasα, β, γ para representar parâmetros (ou constantes). Naturalmente, outros símbolossão permitidos, apenas deve-se sempre tomar o cuidade de definir exatamente o quecada símbolo significa. Variáveis são normalmente representadas por x, y, z.
2.1.2 Equações e identidades
Variáveis podem exister por si só, mas elas só se tornam interessantes quando estãoassociadas a uma ou mais equações ou inequações. Vamos primeiramente discutirapenas equações.
Uma equação estabele um balanço entre os dois lados da equação (separadospelo símbolo =). Toda alteração feita num dos lados da equação exige a mesmaalteração no outro lado da mesma. Por exemplo, poderíamos escrever
C = 75 + 10Q (2.1)
ou seja, custo é igual a 75 mais dez vezes a quantidade produzida (Q). Assim, sefixarmos o custo, encontramos a produção, por exemplo.
Um tipo especial de equação é a chamada identidade. Para tanto, utilizamos osímbolo ≡. Ela normalmente definime como uma variável e descrita em função deoutras. Por exemplo:
L ≡ R− C (2.2)
Nesta equação (2.2), o lucro (L) é definido como sendo a diferença entre a receita(R) (ou seja, o faturamento da empresa) o custo (C).
2.2 O sistema dos números reais
Número naturais 1, 2, 3, . . . são também chamados de inteiros positivos. Seus opostos(no sentido da soma) são −1,−2,−3, . . . e são chamados de inteiros negativos. O 0(zero) não é positivo nem negativo. Ele é neutro numa soma (3 + 0 = 3) e úniconeste sentido. Quando nos referimos os números interios, nos referimos a todos osnúmeros . . . ,−3,−2,−1, 0, 1, 2, 3, . . .
8

O inteiros não esgotam todos os números utilizados na matemática, tambémlidamos com frações, como 2
3, −7
5, etc. Frações não são necessáriamente números
inteiros (mas, podem ser 21= 2). Chamos as razões (ou frações) de números inteiros
(com exceção das frações do tipo 20, −15
0, etc.) de números racionais. Assim, todo o
número inteiro é um número racional, mas nem todo número racional é um númerointeiro. Para sermos mais claros, definimos um número racional como sendo todonúmero que pode ser escrito por uma fração de dois inteiros.
Uma vez que definimos os números racionais, é natural nos perguntarmos sobreos número irracionais. Ou seja, números que não podem ser escritos como fração dedois inteiros. Por exemplo,
√2 não é um número racional! Você sabe demonstrar
isso? Todos os números racionais em conjunto com os irracionais são chamados denúmeros reais.
Cuidado! Divisões por zero (20, −5
0, etc.) não são números. Isso pode ser visto
da seguinte maneira. Seja a um número real (escrevemos a ∈ R). Se assumimos quea0
é um número, digamos b, então a = b · 0. Agora, se a for zero, então b é qualquernúmero real, pois b · 0 = 0 para qualquer b por definição. E, portanto, não estádefinido. Se assumimos a 6= 0 (a diferente de zero), então não existe b que satisfaçaa equação a = b · 0. Logo, não é consistente definir a
0como um número, pois isto
entraria em contradição com nossas definições e axiomas anteriores. Neste sentido,dizemos que divisão por zero não existe!
Números reais não consiste de todos os números utilizados por economistas.Ainda, muito importantes, são os números complexos que estão relacionados com araiz quadrada de números negativos, que não são números reais. Você saba demons-trar isso? Aqui não vamos nos ater a defini-los.
2.3 Conjuntos
Conjuntos aparecem em todos os ramos da matemática e, portanto, é desejável ter,pelo menos, noções básicas de conjuntos. Um conjunto é uma coleção de objetos.Estes objetos podem ser de qualquer tipo. Por exemplo, todas as cadeiras de umasala de aula formam um conjunto. Outro conjunto, é a coleção de todas as cadeirase mesas de uma sala de aula. Ou, ainda, podemos ter um conjunto formada apenaspelos números 2, 7 e 9. Mais, ainda, temos o conjunto de todos os números inteiros.Os objetos de um conjunto são chamados de elementos do conjunto.
Existem duas maneiras de descrever um conjunto: enumeração e descrição. Di-gamos, por exemplo, que S é o conjunto formado pelos elementos 2, 7, 12. Porenumeração, escrevemos:
S = {2, 7, 12}.Neste caso, enumeração é a maneira mais simples de descriver este conjunto.
Entretanto, se quisermos descrever o conjunto de todos os números inteiros Z, omais próximo que podemos fazer por enumeração é:
Z = {. . . ,−3,−2,−1, 0, 1, 2, 3, . . .}ou algo parecido. Agora, mais claro é representar o conjunto por descrição, i.e.:
Z = {x : x é número inteiro}.
9
A nomenclatura acima lê-se “Z é o conjunto de todos os números x tal que x é umnúmero inteiro”. Um exemplo de um conjunto que é impossível de descrever viaenumeração é o conjunto T de todos os números reais maiores que -3 e menores ouiguais a 7. Por descrição, escrevemos:
T = {x : −3 < x < 7}.
Um conjunto com um número finito de elementos é chamado um conjunto finito.Por exemplo, o conjunto S é um conjunto de apenas três elementos e, portanto, finito.Conjuntos com infinitos elementos são chamados de conjuntos infinitos. Exemplos,são os conjuntos Z e T . Todo conjunto finito é enumerável (ou, contável), i.e.podemos contar seus elementos um por um na sequência 1, 2, 3, ... Conjuntosinfinitos podem ser enumeráveis ou não-enumeráveis. Por exemplo, o conjunto dosnúmeros inteiros Z é enumerável. Para ver isso, basta contarmos seus elementosseguindo a sequência 0,−1, 1,−2, 2,−3, 3, . . . Desta forma, estamos dizendo que 0 éo primeiro elemento, −1 é o segundo elemento, 1 é o terceiro elemento e assim pordiante. Note que esta não é a única maneira de contarmos os elementos de Z. Agora,para dizermos que um conjunto é enumérável precisamos encontrar pelo menos umamaneira de contarmos seus elementos. O conjunto T é um exemplo de um conjuntonão-enumerável. A prova deste fato foje o escopo deste texto, entretanto o leitordeve ser capaz de intuir sobre isso.
Para indicarmos que um dado objeto é elementos (ou, membro) de um conjuntousamos o símbolo ∈. Por exemplo, 2 é elemento do conjunto S e escrevemos:
2 ∈ S.
Lê-se 2 é elemento de S, 2 pertence a S ou, 2 é membro de S. Outros exemplos são,−2 ∈ T e −5 ∈ Z.
Para indicarmos que um elemento não é membro de um dado conjunto, usamos/∈. Por exemplo, −5 /∈ T e lê-se −5 não pertence a T , −5 não é elemento de Tou, −5 não é membro de T . Assim, se quisermos dizer que um dado objeto x é umnúmero inteiro, escrevemos x ∈ Z. Aqui, “dado” significa que x é um valor o qualestamos definindo como um número inteiro. Não sabemos ao certo qual o seu valor,mas quando escrevemos x ∈ Z estamos dando uma dica de que este número não équalquer, por exemplo, x não pode ser 2, 13, pois 2, 13 não é número inteiro.
Alguns conjuntos têm símbolos próprios. O conjunto de todos os números na-turais é N. O conjunto de todos os números inteiros é Z. O conjunto de todosos números racionais é Q. O conjunto de todos os números reais é R. Muitos ou-tros conjuntos recebem por padrão um símbolo próprio. Durante o curso vamosnos deparar com alguns deles. De fato, não importa o símbolo que utilizamos pararepresentar um conjunto, mas devemos tomar o cuidado de não haver dúvida sobrea definição do conjunto. Óbviamento, um único símbolo não pode ser usado pararepresentar representar mais de um objeto.
Como exercício, descriva, quando possível, os conjuntos N, Z, Q e R por enume-ração e descrição.
10

2.3.1 Relações entre conjuntos
Quando dois conjuntos são comparados um ao outro, várias relações podem ser ob-servadas. Quando dois conjuntos são formados pelos mesmos elementos, por exem-plo:
S1 = {−1, π,√2} e S2 = {π,−1,
√2},
dizermos que s1 é igual a S2, escrevemos S1 = S2. Note que a ordem dos elementosnão importa. Equivalentemente, dizemos que A é igual a B se, e somente se, paraqualquer x ∈ A temos x ∈ B e vice-versa. Similarmente, se esta condição não ésatisfeita, dizemos que A é diferente de B, escrevemos A 6= B.
Outra relação é conjuntos é chamada de subconjunto. Dizemos que A é subcon-junto de B (escrevemos A ⊂ B), se para todo x ∈ A temos x ∈ B. Por exemplo:
K = {5,−7, 8} e Y = {8, 5}
temos Y ⊂ K, lê-se Y contido em K. Similarmente, dizemos que A não é subcon-junto de B (escrevemos A 6⊂ B), se existe pelo menos um x ∈ A tal que x 6∈ B.Podemos, ainda, escrever A ⊃ B para indicarmos que B é subconjunto de A ou,equivalentemente, dizemos A contém B.
É importante notar que N ⊂ Z ⊂ Q ⊂ R. Mas o contrário não é verdadeiro.Como escrevemos isso através de símbolos?
Note que A = B se, e somente se, A ⊂ B e B ⊃ A. Portanto, A é subconjunto deA, ou seja, todo conjunto é sobconjunto dele mesmo. Além disso, todo subconjuntode A que não seja igual a A é chamado de subconjunto próprio de A. O menorsubconjunto de qualquer conjunto A é o conjunto ∅, o qual não contém nenhumelemento. Este conjunto ∅ é chamado de conjunto vazio (outro símbolo comumenteusado é {}).
Para vermos que ∅ ⊂ A para qualquer conjunto A, observemos que se ∅ não ésubconjunto de A, então ∅ precisa conter pelo menos um elemento, digamos x, talque x ∈ ∅ e x /∈ A. Mas isso é impossível de ocorrer, pois ∅ não contém nenhumelemento. Sendo assim, é absurdo supor que o conjunto vazio não é subconjunto deA, logo ∅ ⊂ A.
Dois conjuntos podem, ainda, não ter nenhum elemento em comum. Neste caso,eles são chamados de conjuntos disjuntos. Por exemplo:
A = {−5,−√3, 0, 5π} e B = {−4,−
√2, 24}
são conjuntos disjuntos.
2.3.2 Operações com conjuntos
Vamos, aqui, discutir três importantes operações entre conjuntos: união, interseção,complemento.
A união de dois conjuntos A e B é o conjunto A∪B (lê-se A união B) formadopor todos os elementos de A ou elementos de B. Ou seja, se C = A ∪ B, entãoA ⊂ C e B ⊂ C. Por exemplo:
A = {2, 3, 4, 8} e B = {1, 5, 6, 7} logo A ∪B = {1, 2, 3, 4, 5, 6, 7, 8}.
11
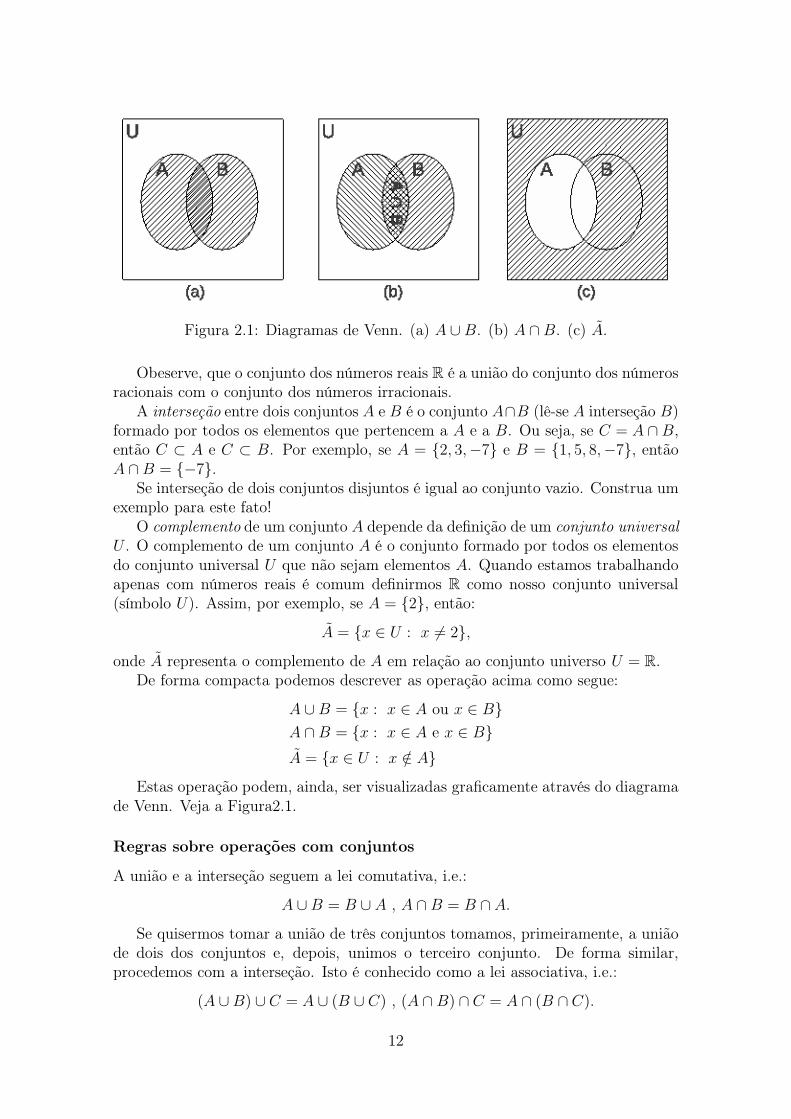
Figura 2.1: Diagramas de Venn. (a) A ∪ B. (b) A ∩ B. (c) A.
Obeserve, que o conjunto dos números reais R é a união do conjunto dos númerosracionais com o conjunto dos números irracionais.
A interseção entre dois conjuntos A e B é o conjunto A∩B (lê-se A interseção B)formado por todos os elementos que pertencem a A e a B. Ou seja, se C = A ∩ B,então C ⊂ A e C ⊂ B. Por exemplo, se A = {2, 3,−7} e B = {1, 5, 8,−7}, entãoA ∩B = {−7}.
Se interseção de dois conjuntos disjuntos é igual ao conjunto vazio. Construa umexemplo para este fato!
O complemento de um conjunto A depende da definição de um conjunto universalU . O complemento de um conjunto A é o conjunto formado por todos os elementosdo conjunto universal U que não sejam elementos A. Quando estamos trabalhandoapenas com números reais é comum definirmos R como nosso conjunto universal(símbolo U). Assim, por exemplo, se A = {2}, então:
A = {x ∈ U : x 6= 2},onde A representa o complemento de A em relação ao conjunto universo U = R.
De forma compacta podemos descrever as operação acima como segue:
A ∪ B = {x : x ∈ A ou x ∈ B}A ∩ B = {x : x ∈ A e x ∈ B}A = {x ∈ U : x /∈ A}
Estas operação podem, ainda, ser visualizadas graficamente através do diagramade Venn. Veja a Figura2.1.
Regras sobre operações com conjuntos
A união e a interseção seguem a lei comutativa, i.e.:
A ∪B = B ∪ A , A ∩ B = B ∩ A.
Se quisermos tomar a união de três conjuntos tomamos, primeiramente, a uniãode dois dos conjuntos e, depois, unimos o terceiro conjunto. De forma similar,procedemos com a interseção. Isto é conhecido como a lei associativa, i.e.:
(A ∪B) ∪ C = A ∪ (B ∪ C) , (A ∩ B) ∩ C = A ∩ (B ∩ C).
12

Existe, ainda, a lei distributiva para união e interseção. Segue:
A ∪ (B ∩ C) = (A ∪ B) ∩ (A ∪ C)
A ∩ (B ∪ C) = (A ∩ B) ∪ (A ∩ C)
2.3.3 Exercícios
Exercício 2.1. Escreva em notação de conjunto (por enumeração e descrição, quandopossível):
(a) O conjunto de todos os números inteiros maiores que −5.
(b) O conjunto de todos os números reais maiores que −3 e menores que −1.
Exercício 2.2. Sejam dados os conjuntos A1 = {−1, π, 3}, A2 = {1, 3, π}, A3 ={−1, 4} e A4 = {π, 24}. Verifica, justificando sua resposta, quais das seguintesafirmações são verdadeiras:
(a) A1 = A4 (b) A3 ⊂ A2 (c) 3 ∈ A2
(d) A1 ⊃ A2 (e) A3 ⊂ N (f) ∅ ⊂ A2
Exercício 2.3. Usando os mesmos conjuntos anteriores e o conjunto universo comoo conjunto R, descreva o conjunto resultante em cada item:
(a) A2 ∪A4 (b) A1 ∩ A1 (c) A3
(d) A4 ∩ A1 (e) A3 ∩ ∅ (f) ∅ ∪A2
Exercício 2.4. Quais das seguintes afirmações são verdadeiras, justifique sua res-posta. Considere R como o conjunto universo.
(a) A ∪ A = A (b) A ∩B = B ∩ A (c)A ∪ ∅ = A
(d) B ∩ ∅ = B (e) A ∪ A = A ∩ A (f) ∅ 6= R
Exercício 2.5. Para os conjuntos A1, A2 e A3 do Exercício 2.2, verifique a leidistributiva.
Exercício 2.6. Represente a lei distributiva para conjuntos através do diagrama deVenn.
Exercício 2.7. Descreva todos os subconjuntos de A = {a, c, k, y}. Quantos sub-conjuntos de A existem?
Exercício 2.8. Se um conjunto tem n elementos. Quantos subconjuntos ele tem?
Exercício 2.9. Seja U o cojunto universo. Qual o complemento de U? Qual é oconjunto U ∩ U? É verdade que ⊂ U e ∅ ⊂ U? Justifique suas respostas.
2.4 Relações e Funções
Lembre que conjuntos é uma coleção de objetos, não somente de números. Umtipo importante na matemática de objetos é o par ordenado. Conjuntos de paresordenados nos levam ao conceito de relação.
13
2.4.1 Par ordenado
Quando escrevemos o conjunto {a, b} não nos importamos com a ordem dos elemen-tos, uma vez que {a, b} = {b, a}. Neste caso, {a, b} é um par não-ordenado. Sequisermos sinalizar que a ordem dos elementos é importante, usamos a simbologia(a, b) (lê-se, o par ordenado a, b). Neste caso, teremos (a, b) 6= (b, a), se a 6= b.Equivalentemente, temos (a, b) = (c, d) se, e somente se, a = c e (b = d).
Analogamente, temos o conceito de tripla ordenada (a, b, c), quadrupla ordenada(a, b, c, d), . . ., n-upla (a1, a2, . . . , an).
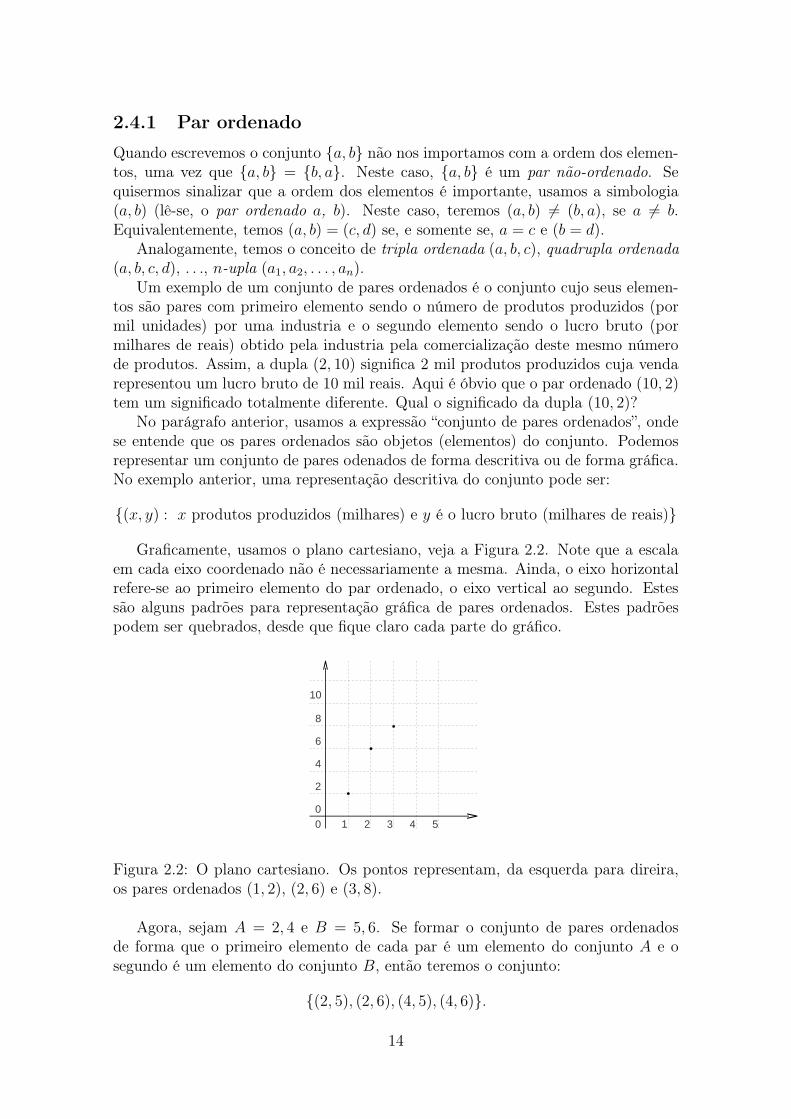
Um exemplo de um conjunto de pares ordenados é o conjunto cujo seus elemen-tos são pares com primeiro elemento sendo o número de produtos produzidos (pormil unidades) por uma industria e o segundo elemento sendo o lucro bruto (pormilhares de reais) obtido pela industria pela comercialização deste mesmo númerode produtos. Assim, a dupla (2, 10) significa 2 mil produtos produzidos cuja vendarepresentou um lucro bruto de 10 mil reais. Aqui é óbvio que o par ordenado (10, 2)tem um significado totalmente diferente. Qual o significado da dupla (10, 2)?
No parágrafo anterior, usamos a expressão “conjunto de pares ordenados”, ondese entende que os pares ordenados são objetos (elementos) do conjunto. Podemosrepresentar um conjunto de pares odenados de forma descritiva ou de forma gráfica.No exemplo anterior, uma representação descritiva do conjunto pode ser:
{(x, y) : x produtos produzidos (milhares) e y é o lucro bruto (milhares de reais)}
Graficamente, usamos o plano cartesiano, veja a Figura 2.2. Note que a escalaem cada eixo coordenado não é necessariamente a mesma. Ainda, o eixo horizontalrefere-se ao primeiro elemento do par ordenado, o eixo vertical ao segundo. Estessão alguns padrões para representação gráfica de pares ordenados. Estes padrõespodem ser quebrados, desde que fique claro cada parte do gráfico.
Figura 2.2: O plano cartesiano. Os pontos representam, da esquerda para direira,os pares ordenados (1, 2), (2, 6) e (3, 8).
Agora, sejam A = 2, 4 e B = 5, 6. Se formar o conjunto de pares ordenadosde forma que o primeiro elemento de cada par é um elemento do conjunto A e osegundo é um elemento do conjunto B, então teremos o conjunto:
{(2, 5), (2, 6), (4, 5), (4, 6)}.
14

Este conjunto é chamado de produto cartesiano, ou produto direto de A e B (símboloA× B). De forma descritiva, temos:
A× B = {(x, y) : x ∈ A e y ∈ B}
Desta forma, o plano cartesiano completo é o produto cartesiano R× R, i.e.:
R× R = {(x, y) : x, y ∈ R}.
Podemos ainda, definir os quadrantes do plano cartesiano. O primeiro quadrante é{(x, y) : x ≥ 0, y ≥ 0}, o segundo quadrante é {(x, y) : x ≤ 0, y ≥ 0}, o terceiroquadrante é {(x, y) : x ≤ 0, y ≤ 0} e, o quarto quadrante é {(x, y) : x ≥ 0, y ≤ 0}.Faça a representação gráfica de cada um destes quadrantes no plano cartesiano!
Quando tomamos o produto cartesiano de um conjunto A por ele mesmo, i.e. A×A, podemos escrever A2. Desta forma, o conjunto de todos os pares ordenados comordenadas reais pode ser compactamente representado por R2. O plano cartesianoR2 é também chamado de espaço bidimensonal.
De fato, podemos estender a idéia de produto cartesiano para mais de três con-juntos. Por definição, temos:
A× B × C = {(x, y, z) : x ∈ A, y ∈ B, z ∈ C}A× B × C ×D = {(x, y, z, t) : x ∈ A, y ∈ B, z ∈ C, t ∈ D}A1 ×A2 × · · · × An = {(x1, x2, . . . , xn) : xi ∈ Ai, i ∈ {1, 2, . . . , n}}
Analogamente, podemos o espaço tridimensional R3 = R × R × R. Um ponto(x, y, z) ∈ R3 no espaço tridimensional é representado graficamente conforme aFigura 2.3.
Figura 2.3: Representação do ponto (2, 3, 2) no espaço tridimensional.
Aqui, nós nos aproximamos de nossa limitação de esboçar várias dimensões. Pararepresentarmos o espaço tridimensional em um plano já tivemos que nos lançar a umaprojeção. A projeção utilizada é um tanto natural, pois é muito próxima de nossapercepção. Entretanto, quando tratamos de mais de três dimensões a representaçãográfica fica no mínimo mais difícil. Por exemplo, a representação descritiva atravésde conjuntos do R4 é um tanto direta, equanto que a representação gráfica é bastante
15

complicada. De forma similar, temos os espaços 5-dimensionais R5, 6-dimensionaisR6, e assim por diante.
Necessitarmos de mais de três dimensões é natural. Por exemplo, se pensarmos,por exemplo, na produção de n produtos de um empresa, teremos que a produçãode cada produto é uma coordenada de um espaço n-dimensional. Pensando emprodução, temos que a confecção de um produto pode estar atrelada a produçãode um ou mais outros produtos. Ou seja, é importante entender a relação entre aprodução de todos os produtos.
2.4.2 Relações e funções
Por simplicidade, voltemos a nos concentrar no espaço bidimensional. Imagine queum empresa fabricante de shampoo contabilize a cada mês a produção (em milharesde shampoos) e seu lucro bruto de venda (em milhares de reais). Depois de 5 meses,teremos um conjunto formado por 5 pares ordenados. Suponhemos que este conjuntoé:
{(1, 3), (1.5, 4.5), (2, 6), (3, 9), (3.5, 10.5)}.Faça um esboço destes pontos no plano cartesiano!
Este conjunto de pares ordenados (ou, simplesmente, pontos) relaciona a produ-ção mensal com o lucro bruto da empresa. De forma mais geral, define-se qualquersubconjunto do plano cartesiano como uma relação. Isto é, cada x relaciona um oumais y no plano. Por conviniencia, vamos geralmente representar um elemento doR2 por um por ordenado (x, y).
Por exemplo, o conjunto {(x, y) : y ≤ x} define uma relação R : R → R (lê-se,R é uma relação de R em R). Um esboço de seu gráfico encontra-se na Figura 2.4.
Figura 2.4: Esboço do gráfico da relação R : R → R definida por {(x, y) : y ≤ x}.
Observe, que dependendo da relação cada x pode estar relacionado a um ou maisy. No exemplo anterior, cada x está relacionada a um número infinito de y’s. Algunspontos petencentes a esta relação são (1, 0.9), (1, 0), (1,−1), (1,−
√2).
Em particular, podemos ter uma relação para qual cada x está relacionado a umúnico y. Por exemplo, a relação f : R → R definida pelo conjunto {(x, y) : y = x}.Faça um esboço de seu gráfico!
Neste caso, y é dito ser função de x e a relação f é chamada de função. Isto é,uma função é uma relação que para cada x relaciona um único y. Assim, quando
16

dizemos que f : A → B é uma função de A em B, temos por definição, que cadaa ∈ A está relacionado a apenas um b ∈ B. Dizemos que b é função de a. Deveestar claro que toda função é uma relação, mas que nem toda relação é uma função.
Note, que se y é função de x, então cada x está unicamente relacionado a y, maso contrário não é necessariamente verdadeiro. Um dado y pode estar relacionado amais de um x. Por exemplo, a função f : A → B, com A = 1, 2, 3 e B = −1, 1,−1definida pelo conjunto {(1,−1), (2, 1), (3,−1)}, relaciona cada x ∈ A a um únicoy ∈ B, mas o contrário é óbviamente falso!
Uma função é também chamada de mapeamento ou transformação. A notaçãoy = f(x) (lê-se, y é função de x) deve ser entendida por uma regra que associa cadax a um único y.
Em uma função y = f(x), chamamos x de argumento e y de valor da função.Ainda, comumente chama-se x de variável independente e y de variável dependente.O conjunto de todos os valores que x pode assumir é chamado de domínio da fun-ção (ou, simplesmente, domínio). O conjunto que os pontos de y podem assumir échamado de contra-domínio da função (ou, simplesmente, contra-domínio) e é co-mumente referido pelo símbolo D(f). Agora, o conjunto dos valores de y para osquais existe pelo menos um x tal que y = f(x) é chamado de imagem da função (ou,simplemente, imagem) e é comumente referido pelo símbolo Im(f). Assim, quandoescrevemos f : A → B é uma função, temos que D(f) ⊂ A, B é o contra-domíniode f e Im(f) ⊂ B.
O domínio e a imagem de uma função nem sempre são explicitadas. Quandoisso ocorre, devemos ter cuidado. Não devemos aplicar uma função a um valor forado domínio e não devemos procurar por um valor da variável dependente que nãopertença a imagem da função. O domínio e a imagem podem ser restringidas pormodelagem do problema. Por exemplo, se a variável independente de uma funçãomodela a produção de um produto, óbviamente este valor não pode ser negativo,pois uma empresa pode fabricar ou não produtos, mas não faz sentido dizer que aempresa fabricou −3 produtos! É difícil de listar todas as situações que levam adeterminação do domínio e da imagem, entretanto, devemos estar sempre atentos aisso.
Figura 2.5: Esboço do gráfico da função custo total C = 150 + 7Q.
Vejamos um exemplo prático. Supohemos que o custo total C de uma empresa
17

é função da produção diária Q, dado por C = 150 + 7Q. Suponhemos, ainda, quea empresa tem uma capacidade limite de 100 unidades de produção diária. Qual éo domínio e a imagem da função custo total? Uma vez que Q pode variar apenasentre 0 e 100, temos que:
D(C) = {Q ∈ R : 0 ≤ Q ≤ 100}.Para entendermos melhor a imagem desta função, observemos o esboço do gráficodesta função custo apresentado na Figura 2.5. Vê-se que a imagem desta funçãoassume todos os valores entre 150 e 850, então:
Im(C) = {C ∈ R : 150 ≤ C ≤ 850}.
2.4.3 Exercícios
Exercício 2.10. Dados A1 = {1, 7, 10}, A2 = {x, y, z} e A3 = {√5, π}, encontre os
seguintes produtos cartesianos:
(a) A1 × A2 (b) A1 ×A3 (c) A3 × A2
Exercício 2.11. Utilizando os conjuntos dados no Exercício 2.10, encontre o pro-duto cartesiano A1 × A2 × A3.
Exercício 2.12. Diga se em geral é verdade que A × B = B × A. Caso não sejasempre verdade, indique quando a igualdade ocorre.
Exercício 2.13. Diga quais das seguintes figuras representa uma função no planocartesiano (justifique sua resposta):
(a) um círculo (b) um retângulo
(b) uma linha vertical (c) uma parábola com concavidade para baixo
Exercício 2.14. Seja f : R → R a função dada por y = 5 + 3x. Sabendo que seudomínio é D(f) = {x : −1 ≤ x ≤ 3}, encontre sua imagem. Faço um esboço dográfico de f .
Exercício 2.15. Seja a função f(x) = −x2. Sabendo que o domínio de f é todosos números não negativos, qual é sua imagem? Faça um esboço do gráfico de f .
Exercício 2.16. Dada a função f(x) = −√x. Qual o domínio desta função? E
qual sua imagem? Faça um esboço de seu gráfico.
Exercício 2.17. Na teoria de firma, os economistas consideram que o custo totalC é função do nível de produção Q, i.e. C = f(Q).
(a) De acordo com a definição de função, todo valor de custo total está relacionadoa um único nível de produção?
(b) Cada nível de produção relaciona um único valor de custo total?
Exercício 2.18. Se um nível de produção Q1 pode ser produzido com um custoC1, então também deve ser possível (sendo menos eficiente) produzir o mesmo nívelde produção a um custo mais alto C2. Desta forma, o nível de produção não defineunicamente um custo, o que não permite escrevermos C em função de Q. Como,mesmo sabendo disso, podemos definir uma função C = f(Q)?
18

2.5 Tipos de funções
Várias funções são comumente encontradas na modelagem matemática. Por suaimportância vamos aqui estudar algumas de suas propriedades.
2.5.1 Funções constantes
Uma função y = f(x) é uma função constante se sua imagem é formada por apenasum elemento. Por exemplo:
y = f(x) =√2.
para todo x ∈ R. Temos Im(f) =√2. Note que o valor de y não se altera
independentemente do valor de x. No plano cartesiano, tal função aparece comouma linha horizontal.
2.5.2 Funções polinomiais
Funções constantes são um caso particular de funções polinomiais. Uma funçãopolinomial de apenas uma variável x tem a seguinte forma geral:
f(x) = a0 + a1x+ a2x2 + a3x
3 + · · ·+ anxn
onde, cada termo consiste de um coeficiente real e um expoente inteiro de x. Lem-bramos que a0 = a0 · 1 = a0x
0 e que a1x = a1x1. Note que os coeficientes podem ser
qualquer valor real, inclusive zero.O grau de uma função polinomial é definido como o maior expoente de x cujo
coeficiente é diferente de zero. Assim, por exemplo, f(x) = 1 − 3x + 7000x5 −0.0001x11 é um polinômio de grau 11. Alguns polinômios recebem um nome próprio:
f(x) = a0 - função constante
f(x) = a0 + a1x - função linear
f(x) = a0 + a1x+ a2x2 - função quadrática
f(x) = a0 + a1x+ a2x2 + a3x
3 - função cúbica
Funções f(x) = a0 + a1x são chamadas de funções lineares, pois satisfazem:
f(x+ αy) = f(x) + αf(y)
para qualquer x, y, α ∈ R. Um função linear pode ser constante (quando a1 = 0),crescente (quando a1 > 0) ou decrescente (quando a1 < 0). O gráfico de uma funçãolinear sempre cruza o eixo y no ponto (0, a0). O coeficiente a1 fornece a declividadeda reta que representa seu gráfico.
O gráfico de uma função quadrática f(x) = a0 + a1x + a2x2 é uma parábola.
O gráfico sempre cruza o eixo y no ponto (0, a0). Caso a2 > 0, a parábola temconcavidade para cima, caso a2 < 0, a parábola tem concavidade para baixo.
19
2.5.3 Funções racionais
Uma função racional é dada pela razão de duas funções polinomiais, i.e.:
f(x) =a0 + a1x+ · · ·+ anx
n
b0 + b1x+ · · ·+ bmxm.
Portanto, toda função polinomial é uma função racional com denominador 1 que éa função polinomial constante.
Uma função racional especial que tem aplicações importantes na economia é afunção do tipo:
y = f(x) =a
xou yx = a,
cujo gráfico é uma hipérbole retangular. Uma vez que o produto de x por y éconstante, esta função tem aplicabilidades interessantes na economia. Por exemplo,a curva de demanda é o gráfico do preço P em função da quantidade de oferta Q,uma vez que a demada PQ se mantenha constante. Outro exemplo, é a curva docusto fixado médio AFC (do inglês, average fixed cost). Com AFC em um dos eixose produção Q no outro eixo, a curva AFC deve ser uma hipórbole retangular, poisAFC ·Q = custo total fixado.
Funções do tipo xy = a nunca atingem os eixos x e y. Entretanto, a curva seaproxima dos eixos assintóticamente: quanto maior o valor de x mais próximo dezero é o valor de y. Similarmente, quanto maior o valor de y mais próximo de zeroé o valor de x. Assim, dizemos que os eixos são as assíntotas da função xy = a.
2.5.4 Funções não-algébricas
Toda função expressa em termos de polinomios ou de raizes (como, raizes quadradas)de polinômios é uma função algébrica. Assim, todas as função discutidas até omomento são funções algébricas.
Entretanto, funções exponenciais tais como y = bx, nas quais a variável inde-pendente aparece no expoente, são função não-algébricas. As funções logaritmicasf(x) = loga x são também não-logaritmicas. Estes dois tipos de funções têm umpapel importante em modelos econômicos! Não é nosso objetivo aqui estudá-las deforma aprofundada, mas fica registrada a dica para os mais curiosos. Outros tiposde funções não-algébricas, são as funções trigonométricas.
2.5.5 Algumas propriedades sobre potenciação
Como já vimos nas funções polinomiais, potenciação aparce com frequência emmodelagem matemática. A expressão 32 significa que 3 está elevado na segundapotência, i.e., 3 está multiplicado por ele mesmo, ou seja, 32 = 3 · 3 = 9. De formageral, temos para n inteiro positivo:
xn = x · x · · ·x︸ ︷︷ ︸
n vezes
.
20

Como caso particular, temos x1 = x e, por definição, x0 = 1. Assim, para n,minteiros não-negativos segue que:
xn+m = xn · xm
xn
xm= xn−m
x−n =1
xnpara todo x 6= 0
xnm = m
√xn
(xn)m = xnm
xn · yn = (xy)n.
2.5.6 Exercícios
Exercício 2.19. Faça o esboço do gráfico das seguintes funções:
(a) y = 12− 3x (b) y = 12 + 3x (c) y = 2x− 3
Exercício 2.20. No Exercício anterior, indique quais são funções crescentes e quaissão decrescentes. Como podemos inferir sobre a declividade de funções linearesmesmo sem conhecer seus gráficos.
Exercício 2.21. Faça o esboço do gráfico das seguintes funções:
(a) y = −x2 + 5x− 2 (b) y = x2 + 5x− 2
tomando seus domínios D(f) = {x ∈ R : −5 < x < 5}. Diga a direção daconcavidade de cada uma destas funções e de que maneira podemos inferir sobre aconcavidade mesmo sem conhecermos seus gráficos.
Exercício 2.22. Simplifique as seguintes expressões:
(a) x4 · x11 (b) xa · xb · xc (c) x3 · y3 · z3
Exercício 2.23. Simplifique as seguintes expressões:
(a)x3
x−3(b)
x12 · x 1
3
x23
Exercício 2.24. Mostre que:
xmn = n
√xm = ( n
√x)m
2.6 Funções de duas ou mais variáveis independen-
tes
Até o momento estudamos apenas funções com uma variável independente y =f(x). Entretanto, o conceito de função pode ser extendido a mais de uma variávelindependente. Por exemplo, dada a função
z = g(x, y)
21

temos que para cada par ordenado (x, y) associa-se um único z. Por exemplo, temosas funções
z = ax+ bz e z = a+ bx+ cx2 + dy2.
Da mesma forma que funções y = f(x) mapeiam x em y, temos que z = g(x, y)mapeia o par ordenado (x, y) em z.
Um exemplo em economia aparece na área de funções de produção. Suponhaque a produção é determinada pela quantidade de capital K e pela força de trabalhoL empregada, então temos que a produção Q é função de K e L, i.e., Q = g(K,L).
Note que podemos estender ainda mais o conceito de função para n variáveisindepedentes. Podemos ter, por exemplo, y = h(u, v, w), a qual mapeia um ponto(u, v, w) no espaço tridimensional a um ponto y no espaço unidimensional.
Funções de várias variáveis também podem ser classificadas em tipos. Por exem-plo, funções da forma
y = a0 + a1x1 + a2x2 + ·+ anxn
são funções lineares. Estas funções serão alvo de nosso estudo em álgebra linear.No próximo capítulo vamos discutir alguns modelos econômicos para os quais
vamos aplicar alguns dos conceitos de álgebra linear que vamos desenvolver duranteeste curso.
22
Capítulo 3
Alguns Modelos Matemáticos daEconomia
Aqui, vamos discutir alguns modelos matemáticos em economia, ou seja, modeloseconômicos que empregam modelagem matemática.
3.1 Modelos de Equilíbrio
Equilíbrio, em economia, pode ser definido de várias maneiras. Um definição co-erente é: equilíbrio é uma coleção de variáveis selecionadas inter-relacionadas eajustadas umas as outras de forma que nenhuma tendência inerente de mudançaprevaleça no modelo, o qual elas constituem.
Vamos analisar esta definição com mais atenção. Primeiramente, usamos a ex-pressão “uma coleção de variáveis selecionadas” o que significa que trata-se apenas dealgumas variáveis escolhidas, podem ser que outras variáveis não são consideradas.Isto é comum em modelagem matemática. Um conjunto de variáveis representativonormalmente deve ser selecionado. Não podemos tratar todas as variáveis existemno universo, qualquer modelo matemático é restrito! Talvez mais importante é no-tarmos que equilíbrio está definido para aquele conjunto de variáveis, se adicionamosuma ou mais variáveis ao modelo, equilíbrio não está mais garantido.
A expressão “variáveis inter-relacionadas” sugere que todas as variáveis devemestar em repouso, caso contrário, se uma variável muda-se, então causaria a mudançadas outras variáveis por inter-relação e, portanto, o modelo não estaria em equilíbrio.
A palavra inerente significa que o equilíbrio está definido apenas entre a relaçãodas forças no modelo, as forças externas são supostamente constantes. Se as forçasexternas mudarem, então aquele estado de equilíbrio não é mais garantido, o modelopode encontrar um novo estado de equilíbrio ou, não entrar em equilíbrio.
Note, ainda, que um estado de equilíbrio não é necessariamente bom. Umaposição de equilíbrio pode ser bastante indesejável e, portanto, algo a ser evitado.Por exemplo, um equilíbrio em um alto nível de desemprego em uma nação. Poroutro lado, o equilíbrio de uma firma na situação de lucro máximo é altamentedesejável na visão da firma.
23

3.1.1 Mercado em equilíbrio parcial (Modelo Linear)
Em um modelo de equilíbrio estático, o problema padrão é encontrar o conjunto devalores para as variáveis do modelo, o qual satisfaz a condição de equilíbrio parao modelo. Quando encontramos estes valores, obtemos, de fato, as condições quelevam o modelo ao equilíbrio. Vamos exemplificar utilizando o modelo de mercadoem equilíbrio parcial, i.e., um modelo de determinação de preço em um mercadoisolado.
Construção do modelo
Uma vez que vamos considerar apenas um bem ou serviço, o modelo consiste deapenas três variáveis: a quantidade demandada do bem ou serviço (Qd), a quanti-dade de oferta do bem ou serviço (Qs) e seu preço (P ). A quantidade é medida,digamos, em kilogramas por semana e seu preço em reais. Tendo determinado asvariáveis, devemos fazer algumas hipóteses sobre o funcionamento do mercado. Pri-meiro, precisamos especificar uma condição de equilíbrio, o que é indispensável emmodelos de equilíbrio. A hipótese padrão é que o mercado está em equilíbrio se, esomente se, o excesso de demanda é zero, i.e., Qd − Qs = 0. Mas, isso levanta aquestão sobre como determinamos Qd e Qs. Para tanto, assumimos que Qd é umafunção linearmente decrescente de P (i.e., se P aumenta, Qd diminui). Por outrolado, Qs é suposta ser linearmente crescente com respeito a P (i.e., se P aumenta,Qs aumenta), com uma suposição extra de que o bem ou serviço só é produzido se opreço excede um certo nível positivo. Em resumo, o modelo contém uma condiçãode equilíbrio e duas equações que governam a demanda e o oferta.
Ou seja, colocando em equações matemáticas, o modelo pode ser escrito comosegue:
Qd = Qs condição de equilíbrio (3.1)
Qd = a− bP equação governante para a demanda (3.2)
Qs = −c+ dP equação governante para a oferta (3.3)
onde, os parâmetros a, b, c, d > 0 e a, b, c, d ∈ R.
Figura 3.1: Esboço do gráfico sobre o modelo de mercado em equilíbrio parcial.
Assim, uma vez que o preço P ≥ 0, temos que a demanda máxima é Qd = a eela decresce a uma taxa −b < 0 em relação a P , como requerido pela modelagem.
24

A equação de governo para a oferta, têm valor mínimo −c < 0 e cresce a uma taxad > 0 em relação a P . Desta forma, a produção só ocorre quando P é suficientementegrande de forma que −c + dP > 0, i.e. P > c/d. Veja a Figura 3.1.
Agora que temos o modelo, nos resta resolvê-lo para obtermos os valores dastrês variáveis P , Qd e Qs. Notemos, que nossa condição de equilíbrio Eq. (3.1), nosgarante igualar as equações Eq. (3.2) e Eq. (3.3), obtemos:
a− bP = −c + dP
ou seja,
P =a + c
b+ d(3.4)
que é o preço que deixa o mercado em equilíbrio parcial. Uma vez que explicitamoso preço P , podemos usá-lo para encontrarmos Qd, através da Eq. (3.2), e Qs, atravésda Eq. (3.3), obtemos:
Qd = a− bP = a− ba + c
b+ d=
ad− bc
b+ d(3.5)
Qs == −c + dP = −c + da+ c
b+ d=
ad− bc
b+ d. (3.6)
A solução encontrada depende dos parâmetros a, b, c, d. Ou seja, uma vez queconhecemos estes valores, as expressões Eq. (3.4), (3.5) e (3.6) nos fornece o preço,a quantidade de demanda e a quantidade de oferta do bem ou serviço. Agora, estesparâmetros não podem ser escolhidos deliberadamente, eles dependem do objeto deestudo. Para o dado bem ou serviço e o mercado a ser considerado, os parâmetrosdevem ser determinados a partir de observações (medições) da realidade. Assim,as curvas Eq. (3.3) e (3.2) são ajustadas o mais próximo da realidade observada.Normalmente, estes parâmetros são obtidos via técnicas de regressão linear.
Entretanto, os parâmetros são, ainda, restritos a certas condições que dependemda teoria econômica. Lembre que durante a modelagem, observamos que a, b, c, d de-vem ser todos maiores que zero. Isto se deve ao fato de que a demanda deve diminuirquando o preço aumenta e a oferta deve aumentar quando o preço aumenta. Deve-mos observar, ainda, que tanto a demanda como a oferta devem sempre ser maioresque zero (quantidades nunca são negativas!). Ou seja, a solução deve satisfazer:
Qd = Qs =ad− bc
d+ d> 0.
Como, sempre d + b > 0, pois d, b > 0, temos que necessariamente ad − bc > 0,ou seja, ad > bc. Essa nova condição deve ser respeitada quando escolhemos osparâmetros. Caso a realidade não nos permita escolher valores que satisfaçam ascondições do modelo, então o modelo não é válido e, portanto não pode ser aplicadopara descrever o objeto de estudo!
25

Exercícios
Exercício 3.1. Dado o modelo de mercado:
Qd = Qs
Qd = 21− 3P
Qs = −4 + 8P
(a) Verifique se os parâmetros do modelo satisfazem as condições de modelagem.(b) Resolva o modelo por um processo de solução a partir do modelo. (c) Compareos valores de P , Qs e Qd, encontrados no item (b) com os valores obtidos atravésdas fórmulas Eq. (3.4), (3.5), (3.6).
Exercício 3.2. Faça um esboço do gráfico das funções Qd e Qs em um mesmográfico e marque no gráfico o ponto de equilíbrio. Resolva cada um dos seguintesmodelos para encontrar o respectivo ponto de equilíbrio. Lembre de verificar se osparâmetros são válidos.
(a)Qd = Qs
Qd = 51− 3PQs = 6P − 10
(b)Qd = Qs
Qd = 30− 2PQs = −6 + 5P
Exercício 3.3. Se b+ d = 0 no modelo de mercado Eq. (3.1), (3.2) e (3.3), então épossível encontrar um ponto de equilíbrio? Justifique sua resposta.
Exercício 3.4. Se b + d = 0 no modelo de mercado Eq. (3.1), (3.2) e (3.3), o quepode ser dito sobre a demanda e a oferta em relação ao preço?
3.1.2 Equilíbrio de Mercado Geral
Na última seção, tratamos de um modelo de um mercado isolado, onde Qd e Qs
de um bem ou serviço são funções apenas do preço deste mesmo bem ou serviço.No mundo real, entretanto, todo bem ou serviço sofre influência de um ou muitosoutros bens e serviços. Por exemplo, o preço de um shampoo no mercado nãoé determinado apenas pela demanda e procura deste shampoo, mas também pelopreço da embalagem, dos produtos químicos utilizados para a sua produção, etc.Um modelo mais realístico de mercado deve levar em comparação não apenas opreço do bem ou serviço em questão, mas também do preço dos bens ou serviçosrelacionadas.
Em modelo de mercado isolado, a condição de equilíbrio consiste de apenasuma equação, i.e. E := Qs − Qd = 0, onde E representa o excesso de demanda.Quando vários bens e serviços inter-dependentes são simultaneamente consideradas,a condição de equilíbrio exige que o excesso de demanda seja nulo para todos osbens ou serviços relacionadas. Se qualquer um dos bens ou serviços tiver excesso dedemanda, então o preço para ajustá-la terá efeito em todas as demais quantidadesde demanda de maneira a não termos um equilíbrio no mercado. Assim, a condiçãode equilíbrio para de um modelo de mercado com n-bens ou serviços envolve nequações, uma para cada bem ou serviço, da forma:
Ei = Qdi −Qsi = 0
26

com, i = 1, 2, . . . , n.Portanto, se uma solução para o modelo existe (nem sempre existe solução para
o modelo!), então teremos um conjunto de preços Pi, demandas Qdi e ofertas Qsi,tais que todas as condições de equilíbrio sejam satisfeitas simultaneamente.
Modelo de mercado com dois bens ou serviços
Para ilustrar o problema, vamos considerar um modelo de mercado envolvendo ape-nas dois bens ou serviços. Vamos, novamente, assumir que as funções de demandae oferta são lineares. Usando parâmetros, o modelo pode ser escrito da seguinteforma:
Qd1 −Qs1 = 0 (3.7)
Qd1 = a0 + a1P1 + a2P2 (3.8)
Qs1 = b0 + b1P1 + b2P2 (3.9)
Qd2 −Qs2 = 0 (3.10)
Qd2 = α0 + α1P1 + α2P2 (3.11)
Qs2 = β0 + β1P1 + β2P2 (3.12)
onde, os parâmetros a e b são coeficientes das funções de demanda e oferta doprimeiro bem ou serviço e, os parâmetros α e β são coeficientes das funções dedemanda e oferta do segundo bem ou serviço.
Até o momento, não consideramos nenhuma condição para os parâmetros en-volvidos. Aqui, não é tão simples determinar tais condições e vamos deixar estadiscussão para mais tarde. No momento, vamos considerar que os parâmetros fa-çam sentido.
Para resolvermos este modelo, vamos proceder similarmente a seção anterior,utilizamos eliminação de variáveis. As equações Eq. (3.7), (3.8) e (3.9), podem sercombinadas de forma a obtermos:
0 = Qd1 −Qs1 = (a0 − b0) + (a1 − b1)P1 + (a2 − b2)P2. (3.13)
De forma similar, utilizamos as equações Eq. (3.10), (3.11) e (3.12), para obter-mos
0 = Qd2 −Qs2 = (α0 − β0) + (α1 − β1)P1 + (α2 − β2)P2. (3.14)
Agora, para encontrarmos os preços P1 e P2, devemos resolver as equaçõesEq. (3.13) e (3.14) simultaneamente. Antes, note que estamos lidando com 12 parâ-metros, o que torna confusa a álgebra. Para simplificarmos a notação, vamos definirnovas constantes da seguinte forma:
b1 = −(a0 − b0)
c1j = aj − bj
b2 = −(α0 − β0)
c2j = αj − βj
27

com j = 1, 2. Nesta nova notação, temos que as equações Eq. (3.13) e (3.14) podemser reescritas da seguinte maneira:
c11P1 + c12P2 = b1 (3.15)
c21P1 + c22P2 = b2 (3.16)
o que chamamos de um sistema linear de duas equações e duas incógnitas (ou,variáveis). Lembrando, as variáveis são P1 e P2.
Durante nosso curso de Álgebra Linear, vamos aprender procedimentos de solu-ção gerais para sistemas de equações lineares, i.e., para uma quantidade qualquerde equações e variáveis. Vamos, ainda, determinar condições necessárias e, comsorte, suficientes para garantirmos solução de existência. Esta teoria é fundamentalquando lidamos com n bens ou serviços, por exemplo.
Bom, mas no momento estamos lidando apenas com um sistema 2 por 2, duasequações e duas variáveis. Para resolvermos este sistema, basta isolarmos uma dasvariáveis, digamos P1, em uma das equações, digamos Eq. (3.15). Fazendo isso,obtemos:
P1 =b1 − c22P2
c11. (3.17)
Agora, substituímos a expressão para P1, obtida na Eq. (3.17), na equação Eq. (3.16).Obtemos:
c21
(b1 − c22P2
c11
)
+ c22P2 = b2
donde, isolando P2, obtemos:
P2 =c11b2 − c21b1c11c22 − c21c22
(3.18)
a qual fornece o preço em equilíbrio do segundo bem ou serviço em função apenasdos parâmetros de modelagem. Uma vez que conhecemos P2, voltamos a Eq. (3.17)e obtemos:
P1 =b1 − c22
c11b2−c21b1c11c22−c21c22
c11
ou seja:
P1 =c22b1 − c22b2c11c22 − c21c22
(3.19)
o que fornece o preço em equilíbrio do primeiro bem ou serviço.Como discutimos anteriormente, os parâmetros devem ser obtidos através de
medidas feitas a partir da observação da realidade. Entretanto, para que o modelofaça sentido, algumas restrições já são conhecidas. Por exemplo, para que as soluçõesEq. (3.19) e (3.18) sejam válidas, o denominar comum a elas (c11c22 − c21c22) nãopode ser zero, pois divisão por zero não existe! Ou seja, devemos ter c11c22 6= c21c22.Ainda, sabemos que o preço nunca pode ser negativo, portanto o denominador emcada uma das expressões Eq. (3.19) e (3.18) deve ter o mesmo sinal do denominador.
28

Exercícios
Exercício 3.5. Resolva o seguinte modelo de mercado com dois bens ou serviçospasso a passo.
Qd1 −Qs1 = 0
Qd1 = 10− 2P1 + P2
Qs1 = −2 + 3P1
Qd2 −Qs2 = 0
Qd2 = 15 + P1 − P2
Qs2 = −1 + 2P2
Verifique sua solução usando as expressões Eq. (3.19) e (3.18).
Exercício 3.6. Reescreva Eq. (3.19) e (3.18) utilizando os parâmetros originais damodelagem a0, a1, a2, b0, b1, b2, α0, α1, α2 e β0, β1, β2.
Exercício 3.7. Verifique que as expressões novas expressões para P1 e P2 obtidasno exercício anterior, satisfazem o modelo original Eq. (3.7)-(3.12).
3.1.3 Análise de Equilíbrio de Renda Nacional
Até o momento, apresentamos a análise de equilíbrio apenas para modelos de mer-cado, entretanto a análise de equilíbrio pode ser aplicada a outros campos da econo-mia. Como exemplo, podemos citar o simples modelo de renda nacional de Keynes(para economia fechada com o governo):
Y = C + I0 +G0 (3.20)
C = a+ bY (3.21)
onde, Y representa o renda nacional, C o gasto de consumo das famílias, I0 é oinvestimento (fornecido como parâmetro para o modelo), G0 é o gasto do governo(também fornecido como parâmetro para o modelo, a e b são parâmetros de ajustedo modelo. A primeira equação Eq. (3.20) é uma condição de equilíbrio, a qualdetermina que o renda nacional deve ser igual ao gasto total planejado. A segundaEq. (3.21), é a função de consumo. Estas duas equações são lineares e contém apenasduas variáveis, a saber, Y e C.
Para resolver este sistema, podemos proceder pelo método de eliminação vistonas seções anteriores. Substituindo C na equação Eq. (3.20) pela expressão dadapela equação Eq. (3.21), obtemos:
Y = a+ bY + I0 +G0
donde, temos:
Y =a+ I0 +G0
1− b(3.22)
a qual nos fornece o renda nacional em equilíbrio dependendo apenas dos parâmetrosdo modelo.
29

Para obtermos C em equilíbrio, basta substituir Y na equação Eq. (3.21) porsua expressão dada em Eq. (3.22). Fazendo isso, obtemos:
C = a+ ba + I0 +G0
1− b
ou seja:
C =a+ b(I0 +G0)
1− b(3.23)
a qual fornece C em equilíbrio.Ambas soluções Eq. (3.22) e (3.23) têm denominador 1 − b, portanto devemos
impor a condição b 6= 1 para evitarmos divisão por zero. Ainda, Y e C devem servalores positivos, logo o numerador em cada uma das expressões Eq. (3.22) e (3.23)deve ter o mesmo sinal de (1− b).
É importante ressaltar que este modelo de renda nacional é demasiado simplese de pouca, ou nenhuma validade, no mundo real. Entretanto, modelos mais so-fisticados podem ser construídos, seguindo as idéias básicas discutidas nesta seção.Entretanto, não é nosso objetivo nos aprofundar em modelos econômicos.
Exercícios
Exercício 3.8. Dado o seguinte modelo:
Y = C + I0 +G0
C = a+ b(Y − T ), com (a > 0, 0 < b < 1) e T é imposto
T = d+ tY, com (d > 0, 0 < t < 1) e t é taxa de impostos
(a) Quais são as variáveis? Quais são os parâmetros externos? Quais são osparâmetros de ajuste?
(b) Encontre o ponto de equilíbrio.
Exercício 3.9. Resolva o modelo anterior sabendo que I0 = 16, G0 = 14, a = 25,b = 1
4, d = 1 e t = 1
10.
30
Capítulo 4
Equações Lineares e Matrizes
4.1 Equações Lineares
Definição 4.1. Equações da forma
a1x1 + a2x2 + · · ·+ anxn = b (4.1)
que expressa b em função das variáveis x1, x2, . . . , xn e das constantes conhecidasa1, a2, . . . , an é chamada equação linear. A solução de (4.1) é uma seqüência denúmeros s1, s2, . . . , sn que satisfazem a equação quando substituímos x1 por s1, x2
por s2 e assim por diante.
Exemplo 4.1. Seja dada a equação linear
x1 + 2x2 − 3x3 = 0
então x1 = 1, x2 = 1 e x3 = 1 é uma solução para esta equação. Entretanto, devemosobservar que esta não é a única solução. Por exemplo, x1 = −1, x2 = −1 e x3 = −1também é solução para esta equação. Ou seja, uma equação linear pode ter soluçãoúnica, ou várias soluções.
Definição 4.2. Um sistema de m equações lineares e n incógnitas ou, simplesmenteum sistema linear, é um conjunto de equações lineares da forma
a11x1 + a12x2 + · · · + a1nxn = b1a21x2 + a22x2 + · · · + a2nxn = b2
... +... + +
... =...
am1x1 + am2x2 + . . . + amn = bm.
(4.2)
Uma solução do sistema linear acima é uma seqüência de números s1, s2, . . . , sn quesatisfazem todas as m equações do sistema ao mesmo tempo quando substituímosx1 por s1, x2 por s2 e assim por diante.
Para resolvermos (ou seja, buscarmos pela solução) de um sistema linear, pode-mos utilizar o método da eliminação.
Definição 4.3. O método da eliminação consiste em realizar as seguintes operações:
31

1. Trocar a posição de duas equações.
2. Multiplicar uma equação por uma constante diferente de zero.
3. Adicionar um múltiplo de uma equação à outra.
Observação 4.1. Note que trocar a posição de duas equações não altera o resultadode uma sistema. Multiplicar uma equação por uma constante diferente de zero tãopouco modifica o resultado da equação, logo, não modifica o resultado do sistema.Por último, adicionar um múltiplo de uma equação à outra também não muda oresultado do sistema. Logo, o método da eliminação apenas transforma o sistemaoriginal de equações em um sistema equivalente, ou seja, um sistema cuja solução éa mesma do sistema original.
O objetivo é simplificar as equações do sistema até um momento que torna-sefácil resolver cada uma das equações.
Observação 4.2. Para um sistema linear pode ocorrer apenas uma das seguintes:
1. ter solução única;
2. ter infinitas soluções;
3. ter infinitas soluções.
O método da eliminação nos leva a identificar cada um destes casos.
Exemplo 4.2 (Sistema linear com solução única). Considere o sistema linear
x + 2y − 3z = 0x − y + z = 12x + y − z = 2.
Vamos resolver este sistema pelo método da eliminação. A idéia é aplicar apenas asoperações dadas na Definição 4.3 para eliminar x da segunda e da terceira equações.Depois, eliminamos y da terceira equação, de forma que a terceira equação se trans-forme em uma equação de apenas uma incógnita, de fácil solução. Assim, obtermosz e depois utilizamos a segunda equação para obtermos y. Por fim, utilizamos aprimeira equação para obtermos x.
Seguindo esta estratégia, trocamos a segunda equação pela soma da primeiraequação, multiplicada por −1, com a segunda equação:
x + 2y − 3z = 0− 3y + 4z = 1
2x + y − z = 2
Agora, trocamos a terceira equação pela soma da primeira equação, multiplicadapor −2, com a terceira equação, obtermos:
x + 2y − 3z = 0− 3y + 4z = 1− 3y + 5z = 2
32

Agora, trocamos a terceira equação pela soma da segunda equação, multiplicada por−1, com a terceira equação, obtemos:
x + 2y − 3z = 0− 3y + 4z = 1
z = 1
Note, que desta forma, a terceira equação têm apenas uma incógnita, e portanto,podemos resolvê-la de maneira trivial. Temos:
z = 1.
Daí, podemos utilizar a segunda equação para obtermos y, pois:
−3y + 4z = 1 ⇒ −3y + 4(1) = 1
⇒ −3y = −3
⇒ y = 1.
Por fim, utilizamos a terceira equação para obtermos x, ou seja:
x+ 2y − 3z = 0 ⇒ x+ 2(1)− 3(1) = 0
⇒ x = 1.
Logo, a solução do sistema linear é x = 1, y = 1 e z = 1. Você saberia verificar esteresultado?
Exemplo 4.3 (Sistema linear com infinitas soluções). Considere o seguinte sistemalinear
x + 2y − 3z = 0x − 3y + 4z = 1
Seguimos o método da eliminação. Trocamos a segunda equação pela soma daprimeira equação, multiplicada por −1, com a segunda equação:
x + 2y − 3z = 0− 5y + 7z = 1
Note, que agora não temos como continuar eliminando variáveis. Assim, o melhorque podemos fazer é utilizar a segunda equação pela isolarmos uma das incógnitas,digamos y. Obtemos
−5y + 7z = 1 ⇒ y = −1
5+
7
5z
Com isso, podemos isolar x utilizando a primeira equação:
x+ 2y − 3z = 0 ⇒ x+ 2
(
−1
5+
7
5z
)
− 3z = 0
⇒ x− 2
5− 1
5z = 0
⇒ x =2
5+
1
5z.
Desta forma, z não está determinado. Entretanto, para qualquer número de desig-narmos para z, obtemos x e y. Logo, temos infinitas soluções.
Por exemplo, se z = 1, então y = 65
e x = 35. Verifique isto! Você poderia dar
mais um exemplo de uma solução?
33

Exemplo 4.4 (Sistema linear sem solução). Considere o seguinte sistema linear
x + 2y = 0x − 3y = 12x + y = −1
Eliminamos x na segunda equação:
x + 2y = 0− 5y = 1
2x + y = −1
Agora, eliminamos x da terceira equação:
x + 2y = 0− 5y = 1− 3y = −1
Agora, eliminamos y na terceira equação somando a segunda equação, multiplicadapor −3
5, com a terceira equação:
x + 2y = 0− 5y = 1
0 = −85
Note que a terceira equação é um absurdo!!! Logo, o sistema não têm solução, pois0 não é igual a −8
5.
Exercício 4.1 (Aplicação em Economia). Resolva o seguinte modelo de mercadocom dois bens ou serviços passo a passo.
Qd1 −Qs1 = 0
Qd1 = 10− 2P1 + P2
Qs1 = −2 + 3P1
Qd2 −Qs2 = 0
Qd2 = 15 + P1 − P2
Qs2 = −1 + 2P2
4.1.1 Lista de Exercícios 2.1
Exercício 4.2. KOLMAN, Capítulo 1, Seção 1.1, Exercícios 1.1, Números: 5, 6,13, 28.
34

4.2 Matrizes
Definição 4.4. Uma matriz A m × n é um arranjo retangular de mn númerosdistribuídos em m linhas e n colunas, da forma:
A =
a11 a12 · · · a1j · · · a1na21 a22 · · · a2j · · · a2n...
......
...ai1 ai2 · · · aij · · · ain...
......
...am1 am2 · · · amj · · · amn
A i-ésima linha de A é
[ai1 ai2 · · · ain] com 1 ≤ i ≤ m
e a j-ésima coluna de A é
a1ja2j...
amj
com 1 ≤ j ≤ n.
Se m = n dizemos que A é uma matriz quadrada de ordem n e que os números a11,a22, . . ., ann formam a diagonal principal da matriz A. Denotamos um elementoda i-ésima linha e j-ésima coluna de A por aij. Ainda, para economizar escrita,escrevemos A = [aij]
mni,j=1.
Exemplo 4.5. A matriz
A =
[1 11 111−2 5 7
]
é uma matriz 2. O elemento (2, 2) é igual a 5.
Exemplo 4.6. A matriz
A =
1 11 111−2 5 7
100√2 3
é uma matriz quadrada de ordem 3. Sua diagonal principal é formada pelos números1, 5, 3.
Definição 4.5. Uma matriz 1 × n é chamada de vetor linha de dimensão n. Umamatriz m× 1 chamada de vetor coluna de dimensão m. Vetores são, normalmente,denotados por letras minúsculas com uma seta sobre-escrita ou uma barra sub-escrita.
Exemplo 4.7. ~u = [4 2 − 1] é um vetor linha de dimensão 3. O vetor
−572−1
é um vetor coluna de dimensão 4.
35

Observação 4.3. A linha de uma matriz é um vetor linha. A coluna de uma matrizé um vetor coluna.
Definição 4.6. Uma matriz quadrada A = [aij ]nni,j=1 em que todos os termos da
diagonal principal são iguais, aii = c para i = 1, . . . , n, e aij = para i 6= j é chamadade matriz escalar.
Exemplo 4.8. A matriz identidade I de ordem 3 dada por
I =
1 0 00 1 00 0 1
é um exemplo de uma matriz escalar.
Definição 4.7. Duas matrizes A = [aij ]mni,j=1 e B = [bij ]
rsi,j=1 são iguais se, e somente
se, m = r, n = s e aij = bij para todo i = 1, . . . , m e j = 1, . . . , m.
Exemplo 4.9. As matrizes
A =
1 11 111−2 5 7
100√2 3
e B =
1 x 111−2 5 y
100√2 3
são iguais se x = 11 e y = 7.
Definição 4.8. Se A = [aij ]mni,j=1 e B = [bij ]
mni,j=1, então a soma de A e B é a matriz
C = A+B = [aij + bij ]mni,j=1.
Exemplo 4.10. A soma das matrizes
A =
1 11−2 5
100√2
e B =
−1 1−2 3
7 −√2
é a matriz
A +B =
0 12−4 8107 0
.
Definição 4.9. Se A = [aij ]mni,j=1 e α é um número real, então a multiplicação por
um escalar de α por A é a matriz αA = [αaij ]mni,j=1.
Exemplo 4.11. Dada a matriz
A =
0 12−4 8107 0
temos que
3A =
0 36−12 24321 0
.
36

Definição 4.10. Se A1, A2, . . ., Ak são matrizes m× n e c1, c2, . . ., ck são númerosreais, então
c1A1 + c2A2 + · · ·+ ckAk
é chamada de combinação linear de A1, A2, . . ., Ak e c1, c2, . . ., ck são chamados decoeficientes da combinação.
Definição 4.11. Se A = [aij]mni,j=1, então a matriz AT = [aji]
nmj,i=1 é chamada de
matriz transposta de A.
Exemplo 4.12. Seja
A =
0 12−4 8107 0
então:
AT =
[0 −4 10712 8 0
]
.
4.2.1 Lista de Exercícios 2.2
Exercício 4.3. KOLMAN, Capítulo 1, Seção 1.2, Exercícios 1.2 (veja [9]), número7.
Exercício 4.4 (Exercício baseado em KOLMAN, Capítulo 1, Seção 1.2, Exemplo 13(veja [9]). Seja ~p = [17, 65 1, 56 18, 75 21, 00] um vetor de dimensão 4 que representaos preços atuais de quatro itens de uma loja. Suponha que a loja anuncie umapromoção em que o preço de cada item esteja reduzido em 15%. (a) Determine umvetor de dimensão 4 que forneça as alterações de preço para os quatro itens. (b)Determine um vetor de dimensão 4 que forneça os novos preços dos itens.
4.3 Produto escalar e multiplicação de matrizes
Definição 4.12 (Produto escalar). Sejam os vetores n-dimensionais:
~u =
u1
u2...un
e ~v =
v1v2...vn
.
Então, define-se o produto escalar por:
~u · ~v =n∑
i=1
uivi = u1v1 + · · ·+ unvn.
Análogo para vetores (1× n)-dimensionais.
37

Exemplo 4.13. Sejam
~a = [−3 2 − 1] e ~b = [3 − 1 5].
Temos:~a ·~b = −3(3) + 2(−1) + (−1)5 = −16.
Definição 4.13 (Multiplicação de matrizes). Sejam A = [aij]mni,j=1 e B = [bkl]
pqk,l=1.
Se n = p, então a multiplicação de A e B é denotada por AB = [abij ]mqi,j=1, onde:
(ab)ij =
n∑
k=1
aikbkj.
Exemplo 4.14. Sejam:
A =
[−1 22 1
]
e B =
[2 1 03 −2 1
]
então:
AB =
[(−1)2 + 2(3) −1(1) + 2(−2) (−1)0 + 2(1)2(2) + 1(3) 2(1) + 1(−2) 2(0) + 1(1)
]
=
[4 −5 27 0 1
]
.
Observação 4.4 (Existência da multiplicação). Sejam A e B matrizes. Note quenem sempre existe AB. Para existir AB o número de colunas de A deve ser igualao número de linhas de B.
Observação 4.5 (Existência da comutatividade). A lei comutativa da multiplicaçãonão é, em geral, válida para matrizes. Isto é, AB 6= BA!
Exercício 4.5. Encontre um exemplo tal que AB 6= BA.
Proposição 4.1. Se ~u e ~v são vetores (1 × n)-dimensional e (n × 1)-dimensional,respectivamente. Então:
~u~v = ~vT~u.
Demonstração. Suponhamos, sem perda de generalidade, que
~u =
u1...un
e ~v =
[v1 · · · vn
].
Daí:
~u~v =
n∑
i=1
uivi =
n∑
i=1
viui = ~vT~u.
�
38

Observação 4.6 (Produto matriz por vetor em termos de vetores colunas). Noteque, por exemplo:
A =
−1 3 −22 −5 7
−2 4 8
xyz
= x
−13
−2
+ y
3−57
+ z
−278
Ou seja, o produto de uma matriz A por um vetor ~x, i.e. A~x, é uma combinaçãolinear dos vetores colunas da matriz A.
Definição 4.14 (Forma matricial de um sistema linear). Seja dado o sistema linear:
a11x1 + a12x2 + · · · + a1nxn = b1a21x2 + a22x2 + · · · + a2nxn = b2
... +... + +
... =...
am1x1 + am2x2 + . . . + amn = bm.
Este sistema pode ser equivalentemente escrito na forma matricial:
A~x = ~b
onde:
A =
a11 a12 · · · a1j · · · a1na21 a22 · · · a2j · · · a2n
......
......
ai1 ai2 · · · aij · · · ain...
......
...am1 am2 · · · amj · · · amn
~x =
x1
x2...
xi...
xn
e ~b =
b1b2...
bj...
bm
.
Ainda, a matriz:
A =
a11 a12 · · · a1j · · · a1n | b1a21 a22 · · · a2j · · · a2n | b2
......
...... | ...
ai1 ai2 · · · aij · · · ain | bi...
......
... | ...am1 am2 · · · amj · · · amn | bm
é chamada de matriz aumentada do sistema.
39

Exemplo 4.15. Seja dado o sistema linear
x1 + 2x2 − x3 = 1−x1 − 3x2 = −1
x2 + x3 = 2
Então, a matriz aumentada correspondente é:
1 2 −1 | 1−1 −3 0 | −10 1 1 | 2
4.3.1 Lista de Exercícios 2.3
Exercício 4.6. Seja ~u · ~v = 5. Calcule x, se:
~u =
x−35
e ~v =[−2 x −3
].
Exercício 4.7. Dados
A =
[7 2 −18 −2 3
]
, B =
4 −15 2
−1 6
e C =
[0 1
−1 0
]
calcule −2AB − 5C.
Exercício 4.8. Dada a matriz aumentada
2 −1 0 −7 | 14 2 −3 1 | −30 0 2 −5 | 0
escreva o sistema linear correspondente na sua forma algébrica.
Exercício 4.9. KOLMAN, Capítulo 1, Seção 1.3, Exercícios 1.3, número 31.
4.4 Propriedades das operações com matrizes
Teorema 4.1. Sejam A, B e C matrizes (m × n)-dimensionais. Então, valem asseguintes afirmações:
(a)A +B = B + A
(b)A+ (B + C) = (A +B) + C
(c)Existe uma única matriz O (matriz nula) tal que A+O = A
(d)Para cada matriz A, existe uma única matriz − A (matriz oposta) tal que A+ (−A) = O
40

Teorema 4.2. Se A, B e C forem matrizes de tamanho apropriados, então valemas seguintes afirmações:
(a)A(BC) = (AB)C
(b)A(B + C) = AB + AC
(c)(A+B)C = AC +BC
Observação 4.7. Observe que, ao contrário de números reais, nem sempre é verdadeque AB = BA! Ou seja, em geral, AB 6= BA.
Definição 4.15 (Matriz Identidade). A matriz identidade (n× n)-dimensional é amatriz:
In =
1 0 · · · 00 1 · · · 0...
......
...0 0 · · · 1
cujos componentes são nulos, exceto na diagonal principal, onde valem 1.
Teorema 4.3. Sejam r, s números reais e A,B matrizes de tamanho apropriados,então valem as seguintes afirmações:
(a)r(sA) = (rs)A
(b)(r + s)A = rA+ sA
(c)r(A+B) = rA+ rB
(d)A(rB) = (rA)B = r(AB)
Teorema 4.4. Sejam A e B matrizes de tamanhos apropriados, então valem asseguintes afirmações:
(a)(AT )T = A
(b)(A+B)T = AT +BT
(c)(AB)T = BTAT
(d)(rA)T = rAT
Definição 4.16. Uma matriz A é chamada de matriz simétrica se, e somente se:
AT = A.
4.4.1 Lista de Exercícios 2.4
Exercício 4.10. KOLMAN, Capítulo 1, Seção 1.4, Exercícios 1.4, números: 9(a),12, 20.
41
Figura 4.1: Ilustração de um vetor no plano.
4.5 Transformações matriciais
Nesta seção, apresenta-se uma breve introdução a transformações matriciais.No plano R2, o vetor ~v =
[x0 y0
]é representado por um segmento de reta
orientado com ponto inicial em (0, 0) e ponto final (x0, y0) (veja a Fig. 4.1).Analogamente, um vetor em R3, por exemplo, ~w =
[x0 y0 z0
]também é
representado por um segmento de reta orientado com ponto inicial (0, 0) e pontofinal (x0, y0, z0) (veja a Fig. 4.2).
Figura 4.2: Ilustração de um vetor no espaço.
Definição 4.17. Uma transformação matricial é uma função f : Rn → Rm, definidapor f(~u) = A~u, onde ~u é um vetor n-dimensional e A é uma matriz (m × n)-dimensional. O vetor f(~u) é a imagem do vetor ~u. O conjunto de todas as imagensde vetores em Rn é chamado de conjunto imagem.
Exemplo 4.16. Seja f : R2 → R2 a transformação matricial definida por
f(~u) =
[1 3
−1 2
]
~u.
42

Assim, por exemplo, a imagem do vetor ~v =[1 1
]é A~v =
[4 1
].
Para um vetor qualquer ~u =[x0 y0
], teremos a imagem A~v =
[x0 + 3y0 −x0 + 2y0
].
Agora, para determinarmos o conjunto imagem, devemos verificar se dado um vetor~v =
[x y
], conseguimos encontrar x0 e y0 tais que:
{x0 + 3y0 = x
−x0 + 2y0 = y
Daí, obtemos:
x0 = x− 3x+ 3y
5e y0 =
x+ y
5.
Logo, para qualquer vetor ~v, existe um vetor ~u tal que ~v = A~u. Portanto, o conjuntoimagem da transformação matricial é R2.
Observação 4.8. Já observamos que todo o sistema linear pode ser escrito na formamatricial A~x = ~b. Ou seja, quando estamos resolvendo um sistema linear, estamosprocurando pelo vetor ~x cuja imagem da transformação matricial A~x é ~b.
4.5.1 Lista de Exercícios 2.5
Exercício 4.11. Seja dada a transformação matricial
f(~u) =
[2 −10 0
]
~u.
(a) Faça, em um mesmo gráfico, o esboço dos vetores ~u =[1 1
]e A~u. (b)
Determine o conjunto imagem da transformação matricial.
4.6 Resolução de Sistemas Lineares
Vamos, agora, explorar um pouco mais a redução de sistemas de equações linearesusando a forma matricial estendida.
4.6.1 Método de Eliminação de Gauss
O método de eliminação de Gauss consiste nos seguintes passos:
1. Formar a matriz aumentada [A : ~b]
2. Transformar a matriz aumentada [A : ~b] na sua forma escalonada por linhas[C : d]
3. Resolve-se, de baixo para cima, o sistema correspondente a [C : d].
Exemplo 4.17. Resolver o sistema
x + y + z = 1x + y − 2z = 32x + y + z = 2
pelo método de eliminação de Gauss.
43

Solução Primeiramente, escrevemos:
1 1 1... 1
1 1 −2... 3
2 1 1... 2
Agora, escalonamos por linhas até obtermos uma matriz triangular superior, cujadiagonal contenha apenas 0 ou 1. Isto é:
1 1 1... 1
0 1 1... 0
0 0 1... −2
3
Agora, montamos o sistema correspondente, i.e.:
x + y + z = 1y + z = 0
z = −23
Logo, temos z = −23. Daí:
y + z = 0 ⇒ y =2
3.
E, por fim, temos:x+ y + z = 1 ⇒ x = 1.
♦
4.6.2 Método da Eliminação de Gauss-Jordam
O método de eliminação de Gauss-Jordam consiste nos seguintes passos:
1. Formar a matriz aumentada [A : ~b]
2. Transformar a matriz aumentada [A : ~b] na sua forma escalonada reduzida porlinhas [C : d]
3. Resolve-se, de baixo para cima, o sistema correspondente a [C : d].
Exemplo 4.18. Resolver o sistema
x + y + z = 1x + y − 2z = 32x + y + z = 2
pelo método de eliminação de Gauss.
44

Solução Primeiramente, escrevemos:
1 1 1... 1
1 1 −2... 3
2 1 1... 2
Agora, escalonamos por linhas até obtermos uma matriz diagonal, cujas componen-tes sejam 0 ou 1. Isto é:
1 0 0... 1
0 1 0... 2
3
0 0 1... −2
3
Agora, montamos o sistema correspondente, i.e.:
x = 1y = 2
3
z = −23
Logo, temos z = −23, y = 2
3e x = 1. ♦
4.6.3 Sistemas Homogêneos
Definição 4.18. Um sistema homogêneo é definido por
A~x = ~0.
Observação 4.9. Todo o sistema homogêneo tem ~x = ~0 como solução. Esta échamada de solução trivial. Caso exista outra solução tal que ~x 6= ~0, então esta seráchamada de solução não trivial.
Teorema 4.5. Um sistema homogêneo de m equações e n incógnitas sempre temsolução não trivial se m < n.
Observação 4.10. Seja A~x = ~b, com ~b 6= 0 um sistema linear consistente (i.e.,o sistema tem solução). Se ~xp é uma solução particular deste sistema e ~xh é umasolução do sistema homogêneo associado (A~x = ~0), então xp + xh também é soluçãodo sistema original. Ou seja, qualquer solução ~xq de A~x = ~b pode ser escrita naforma ~xp+~xh, onde ~xp é uma solução do sistema não homogêneo e ~xh é uma soluçãodo sistema homogêneo associado.
4.6.4 Lista de Exercícios 3.1
Exercício 4.12. KOLMAN, Capítulo 1, Seção 1.6, Exercícios 1.6, números: 21(c),37.
45

4.7 Inversa de uma Matriz
Definição 4.19. Uma matriz A (n × n)-dimensional é dita invertível (ou não-singular) se, e somente se, existir uma matriz A−1 tal que
AA−1 = A−1A = In.
Neste caso, A−1 é chamada de matriz inversa de A. Se A−1 não existir, então A édita não-invertível (ou, singular.
Exemplo 4.19. Seja
A =
[1 21 1
]
.
calcule sua inversa, se existir.
Solução A inversa de A, se existir, será a matriz A−1 tal que
AA−1 = In
Agora, denotando
A−1 =
[x1 x2
y1 y2
]
.
Temos que:
AA−1 =
[1 21 1
] [x1 y1x2 y2
]
=
[1 00 1
]
Logo, podemos identificar dois sistemas lineares{
x1 + 2x2 = 1x1 + x2 = 0
e {y1 + 2y2 = 0y1 + y2 = 1
Resolvendo estes sistemas, obtemos:
A−1 =
[x1 y1x2 y2
]
=
[−1 21 −1
]
♦
Teorema 4.6 (Propriedades da Matriz Inversa). Sejam A e B matrizes (n × n)-dimensionais invertíveis. Então, valem as seguintes propriedades:
(a)(A−1
)−1= A
(b) (AB)−1 = B−1A−1
(c)(AT)−1
=(A−1
)T
46

Demonstração. (a) Por definição, temos:
AA−1 = A−1A = In
logo, a inversa de A−1 é a própria matriz A.
(b) Devemos mostrar que B−1A−1 é a inversa de AB. Logo, devemos verificar adefinição:
AB(B−1A−1) = A(BB−1)A−1 = AInA−1 = AA−1 = In.
e(B−1A−1)AB = B−1(A−1A)B = B−1InB = B−1B = In.
(c) Queremos mostrar que (A−1)T é a inversa da matriz AT . Para tanto, verifica-mos a definição:
(A−1
)TAT =
(AA−1
)T= ITn = In
e(AT) (
A−1)T
=(A−1A
)T= ITn = In.
�
4.7.1 Método de escalonamento para calcular A−1
Como vimos no primeiro exemplo desta seção, encontramos a inversa de uma matrizmontando dois sistemas lineares. Note que os sistemas tem a mesma matriz decoeficientes A e diferem apenas por seus valores a direita b. A idéia é resolvê-lossimultaneamente pelo método de eliminação de Gauss-Jordan.
Definição 4.20. O método de escalonamento para calcular A−1 pode ser resumidoda seguinte forma:
1. Forme a matriz estendida [A...In]n×2n.
2. Calcule a matriz escalonada reduzida (método de Gauss-Jordan) [C...B].
3. Se C = In, então A−1 = B. Caso contrário, a inversa não existe.
Exemplo 4.20. Encontre a inversa da matriz
1 1 10 2 35 5 1
Solução Veja a aula. ♦
Exemplo 4.21. Encontre a inversa da matriz
1 2 −31 1 12 3 −2
47

4.7.2 Sistemas lineares e a matriz inversa
Seja dado o sistema linear A~x = ~b. Note que, se A−1 existe, então:
A~x = ~b ⇒ A−1A~x = A−1~b
⇒ In~x = A−1~b
⇒ ~x = A−1~b.
Teorema 4.7. Seja A é uma matriz (n× n)-dimensional. O sistema homogêneo
A~x = ~0
tem solução não-trivial se, e somente se, A é singular.
Demonstração. Suponha que A é invertível e ~xh é uma solução não trivial do sistemahomogêneo. Então:
A~xh = ~0 ⇔ A−1A~xh = A−1~0
⇔ In ~xh = A−1~0
⇔ ~xh = ~0.
o que é um absurdo, pois ~xh 6= 0. �
Teorema 4.8. As seguintes afirmações são equivalentes:
(a) A é invertível
(b) ~x = ~0 é a única solução para A~x = ~0
(c) O sistema A~x = ~b tem uma única solução para qualquer ~b.
4.7.3 Lista de Exercícios 3.2
Exercício 4.13. Escreva os seguintes sistemas na suas formas matriciais A~x = ~b.Calcule a matriz inversa A−1, se existir, em cada um dos casos. Use a matriz inversapara obter a solução do sistema, se existir solução única.
(a)x + 2y + 3z = 1
2y + 2z = 2x + 2y + 3z = 0
(b)2x + y − z = −1x − 2y − 3z = 0
−3x − y + 2z = 1
Exercício 4.14. Para quais valores λ, o seguinte sistema homogêneo
(λ− 1)x + 2y = 02x + (λ− 1)y = 0
tem solução solução não trivial?
48

4.8 Decomposição LU
A decomposição LU está relacionada ao método de eliminação de Gauss. Dada umamatriz A, buscamos reescrevê-la como o produto de uma matriz diagonal inferior Le uma matriz diagonal superior U , ou seja:
A = LU.
Obtemos U anulando os elementos a baixo da diagonal de A, ou seja:
(E1 × E2 × · · · ×En)A = U
onde Ei são as matrizes elementares que representam os distintos passos da elimi-nação. Daí:
A = (E1 × E2 × · · · × En)−1 U
Daí, temos:A = LU
onde:U = (E1 × E2 × · · · ×En)A
eL = (E1 ×E2 × · · · × En)
−1
Exemplo 4.22. Seja A a matriz
A =
6 −2 −4 43 −3 −6 1
−12 8 21 −8−6 0 −10 7
4.8.1 Fatoração LU e sistemas lineares
Observe que se A = LU , então
A~x = ~b ⇔ (LU)~x = ~b
⇔ L(U~x) = ~b
Logo, podemos resolver o sistema em dois passos:
1. L~z = ~b
2. U~x = ~z.
Exemplo 4.23. Seja A a matriz do Exemplo 4.22, resolva usando fatoração LU osistema A~x = ~0.
4.8.2 Lista de Exercícios 3.3
Exercício 4.15. Resolva o seguinte sistema usando fatoração LU .
2x + 3y + 4z = 64x + 5y + 10z = 164x + 8y + 2z = 2
49
Referências Bibliográficas
[1] Howard Anton. Cálculo um novo horizinte, volume 1. Bookman, 6th edition,2000.
[2] Rutherford Aris. Vectors, Tensors, and the Basic Equations of Fluid Mechanics.Dover Publications, 1989.
[3] R. P. Benedict. Fundamentals of Pipe Flows. 1980.
[4] I.N. Bronshtein. Handbook of Mathematics. 5. edition, 2007.
[5] A.C. Ciang and K. Wainwright. Fundamental methods of Mathematical Econo-mics. McGraw-Hill, 4 edition, 2005.
[6] K. Dadkhah. Foundations of Mathematical and Computational Economics.Springer, 2 edition, 2011.
[7] L.R. Doering. Pré-Cálculo. 2. edition, 2010.
[8] C.H. Edwards and D.E. Penney. Cálculo com Geometria Analítica, volume 1.1997.
[9] B. Kolman and D.R. Hill. Introdução à Álgebra Linear com Aplicações. 8.edition, 2006.
[10] R.E. et al. Larson. Cálculo y Geometría Analítica, volume 1. 2005.
[11] L. Leithold. O cálculo com geometria analítica, volume 2. HARBRA, 3 edition,1994.
[12] S. H. Leuba and J. Zlatanova. Biology at the Single Molecule Level. Pergamon,2001.
[13] E.L. Lima. A Matemática do Ensino Médio. 2001.
[14] E.L. Lima. Análise Real, volume 1. 2010.
[15] W. Rudin. Real and Complex Analysis. 1974.
[16] G.F. Simmons. Cálculo com Geometria Analítica, volume 1. 1998.
[17] C. Simon and L. Blume. Matemática para Economistas. Bookman, 2008.
[18] M.R. Spiegel. Manual de Fórmulas e Tabelas Matemáticas. 2. edition, 2004.
29
[19] M.R. Spiegel. Formulas y Tabelas de Matematica Aplicada. 2. edition, 2005.
[20] J. Stewart. Cálculo, volume 1. 2001.
[21] J. Stewart. Cálculo de una variable. Transcendentes tempranas. 4. edition,2001.
[22] J. Stewart. Calculus – Concepts and Contexts. 4. edition, 2009.
[23] J. Warnatz, U. Maas, and R.W. Dibble. Combustion: Physical and ChemicalFundamentals, Modeling and Simulation, Experiments, Pollutant Formation.Springer, 3rd edition, 2001.
30